Instant digital products (PDF, ePub, MOBI) ready for you
Download now and discover formats that fit your needs...
Tribology of Graphene: Simulation Methods, Preparation Methods, and Their Applications Oleksiy V. Penkov
https://ebookmass.com/product/tribology-of-graphene-simulationmethods-preparation-methods-and-their-applications-oleksiy-v-penkov/
ebookmass.com
Elsevier Weekblad - Week 26 - 2022 Gebruiker
https://ebookmass.com/product/elsevier-weekbladweek-26-2022-gebruiker/
ebookmass.com
Sanctuary V. V. James
https://ebookmass.com/product/sanctuary-v-v-james/
ebookmass.com
Calculus 9th Edition James Stewart
https://ebookmass.com/product/calculus-9th-edition-james-stewart/
ebookmass.com
Cloud White Fearne Hill
https://ebookmass.com/product/cloud-white-fearne-hill/
ebookmass.com
Defects in Two-Dimensional Materials Rafik Addou
https://ebookmass.com/product/defects-in-two-dimensional-materialsrafik-addou/
ebookmass.com
ISE Genetics: From Genes to Genomes (ISE HED WCB CELL & MOLECULAR BIOLOGY) 7th Edition Michael L. Goldberg Md
https://ebookmass.com/product/ise-genetics-from-genes-to-genomes-isehed-wcb-cell-molecular-biology-7th-edition-michael-l-goldberg-md/
ebookmass.com
The Silenced Women Frederick Weisel
https://ebookmass.com/product/the-silenced-women-frederick-weisel-2/
ebookmass.com
The Cultural Dimension of Global Business 8th Edition, (Ebook PDF)
https://ebookmass.com/product/the-cultural-dimension-of-globalbusiness-8th-edition-ebook-pdf/
ebookmass.com
Curse of Night (A vampire and witch paranormal romance) (Thorne Hill Book 5) Emily Goodwin [Goodwin
https://ebookmass.com/product/curse-of-night-a-vampire-and-witchparanormal-romance-thorne-hill-book-5-emily-goodwin-goodwin/
ebookmass.com
ELECTRICMOTOR DRIVESANDTHEIR
APPLICATIONSWITH
SIMULATIONPRACTICES
ELECTRICMOTOR DRIVESANDTHEIR APPLICATIONSWITH SIMULATIONPRACTICES
V.INDRAGANDHI
AssociateProfessor,SchoolofElectricalEngineering,VIT,Vellore, Tamilnadu,India
R.SELVAMATHI
AssociateProfessor,DepartmentofElectricalandElectronics Engineering,AMCEngineeringCollege,Bangalore,India
V.SUBRAMANIYASWAMY
Professor,SchoolofComputing,SASTRADeemedUniversity,India
AcademicPressisanimprintofElsevier 125LondonWall,LondonEC2Y5AS,UnitedKingdom 525BStreet,Suite1650,SanDiego,CA92101,UnitedStates 50HampshireStreet,5thFloor,Cambridge,MA02139,UnitedStates TheBoulevard,LangfordLane,Kidlington,OxfordOX51GB,UnitedKingdom
Copyright©2022ElsevierInc.Allrightsreserved.
Nopartofthispublicationmaybereproducedortransmittedinanyformorbyany means,electronicormechanical,includingphotocopying,recording,oranyinformation storageandretrievalsystem,withoutpermissioninwritingfromthepublisher.Detailson howtoseekpermission,furtherinformationaboutthePublisher’spermissionspolicies andourarrangementswithorganizationssuchastheCopyrightClearanceCenterandthe CopyrightLicensingAgency,canbefoundatourwebsite: www.elsevier.com/permissions.
Thisbookandtheindividualcontributionscontainedinitareprotectedundercopyright bythePublisher(otherthanasmaybenotedherein).
Notices
Knowledgeandbestpracticeinthisfieldareconstantlychanging.Asnewresearchand experiencebroadenourunderstanding,changesinresearchmethods,professional practices,ormedicaltreatmentmaybecomenecessary.
Practitionersandresearchersmustalwaysrelyontheirownexperienceandknowledgein evaluatingandusinganyinformation,methods,compounds,orexperimentsdescribed herein.Inusingsuchinformationormethodstheyshouldbemindfuloftheirownsafety andthesafetyofothers,includingpartiesforwhomtheyhaveaprofessionalresponsibility.
Tothefullestextentofthelaw,neitherthePublishernortheauthors,contributors,or editors,assumeanyliabilityforanyinjuryand/ordamagetopersonsorpropertyasa matterofproductsliability,negligenceorotherwise,orfromanyuseoroperationofany methods,products,instructions,orideascontainedinthematerialherein.
ISBN:978-0-323-91162-7
ForInformationonallAcademicPresspublicationsvisitourwebsiteat https://www.elsevier.com/books-and-journals
Publisher: CharlotteCockle
AcquisitionsEditor: LisaReading
EditorialProjectManager: MichelleFisher
ProductionProjectManager: ManjuThirumalaivasan
CoverDesigner: MilesHitchen
TypesetbyAptara,NewDelhi,India
Preface xi
Acknowledgmentsxiii
1IntroductiontoelectricdrivesandMATLABdriveblocks1
1.1 Introductiontoelectricdrives1
1.2 Importanceofelectricdrives2
1.3 Basicblockdiagramofelectricdrives3
1.4 Applicationsofelectricdrives5
1.5 Classificationofelectricdrives19
1.6 IntroductiontoMATLAB/Simulink24
1.7 Othersoftware’susedforelectricdrivessimulation27
1.8 Retunethedriveparameters29
1.9 Modifyadriveblock30
1.10 Electricdriveslibrary30
1.11 Mechanicalcouplingoftwomotordrives35
1.12 Variouscontrolmethodsofelectricdrive38
1.13 Buildingyourowndrive42
1.14 Summary44
1.15 ReviewQuestions44
2ConverterfedDCdriveswithsimulation45
2.1 Introduction45
2.2 UncontrolledconverterfedDCdrives48
2.3 ControlledconverterfedDCdrives54
2.4 Modelingoffull-bridgerectifierfedDCmotorinSimulinkbridgerectifier64
2.5 Single-phasefullycontrolledconverterfedseparatelyexcitedDCmotordrive67
2.6 1-phasehalf-controlledconverterfedseparatelyexcitedDCmotor72
2.7 Three-phasefullycontrolledconverterfedseparatelyexcitedDCmotor72
2.8 Three-phasehalf-controlledconverterfedseparatelyexcitedDCmotor77
2.9 PulsewidthmodulationconverterfedDCdrives77
2.10 MultiquadrantoperationoffullycontrolledconverterfedDCmotor81
2.11 Closed-loopcontrolofconverterfedDCmotor84
2.12 Summary88
2.13 Reviewquestions88
3Chopperfedelectricdriveswithsimulation91
3.1 Introductiontochoppersanditsclassification91
3.2 Controlstrategiesofchopper93
3.3 Designofboostconverter94
3.4 Designofbuckconverter112
3.5 One-quadrantchopperDCdrive130
3.6 One-quadrantchopperDCdrivewithhysteresiscurrentcontrol163
3.7 Two-quadrantchopperDCdrive177
3.8 Four-quadrantchopperDCdrive180
3.9 Closed-loopcontrolofchopperfedDCdrive194
3.10 Casestudies211
3.11 Numericalsolutionswithsimulation211
3.12 Summary225 PracticeQuestions225 MultipleChoiceQuestions225 References227
4Inductionmotordrivesanditssimulation229
4.1 Introduction229
4.2 Simulationofthree-phaseinductionmotoratdifferentloadconditions234
4.3 PWMinverterfedvariablefrequencydrivesimulation237
4.4 Simulationofthesingle-phaseinductionmotor238
4.5 Speedestimateddirecttorquecontrol239
4.6 SpeedcontrolofinductionmotorusingFOC246
4.7 AVSIfedinductionmotordrivesystemusingPSIM253
4.8 Field-orientedcontrolofinductionmotordriveusingPSIM254
4.9 Field-orientedcontrolofinductionmotordriveusingthe incrementalencoderusingPSIM257
4.10 Practicequestions259
5Synchronousmotordrivesanditssimulation261
5.1 Introductiontosynchronousmotordrives261
5.2 Currentsourceinverterfedsynchronousmotordrives269
5.3 Voltagesourceinverterfedsynchronousmotordrives285
5.4 Cycloconverterfedsynchronousmotordrives297
5.5 Loadcommutatedsynchronousmotordrives317
5.6 Linecommutatedcycloconverter-fedsynchronousmotordrives319
5.7 Casestudies321
5.8 Numericalsolutionswithsimulation322
5.9 Summary322
6BLDC-baseddrivescontrolandsimulation327
6.1 IntroductiontoBLDC327
6.2 BLDCpositioncontrol340
6.3 BLDChysteresiscurrentcontrol343
6.4 BLDCspeedcontrol353
6.5 IntroductiontoBLDCinPSIMsoftware354
6.6 BrushlessDCmotordrivewith6-pulseoperationusingPSIM362
6.7 BrushlessDCmotordrivewithspeedfeedback(6-pulseoperation) usingPSIM363
6.8 BrushlessDCmotordriveusingtheHalleffectsensorusingPSIM364
6.9 Summary365 ReviewQuestions369
7PMSMdrivescontrolandsimulationusingMATLAB371
7.1 IntroductiontoPMSM371
7.2 VectorcontrolofPMSM376
7.3 Modelingandsimulationofsingle-phasePMSM382
7.4 Modelingandsimulationofthree-phasePMSM401
7.5 PMSMmotorcontrolwithspeedfeedbackusingPSIM401
7.6 PMSMmotorcontrolwithspeedfeedbackusingtheabsoluteencoder usingPSIM403
7.7 PMSMmotorcontrolwithspeedfeedbackusingaresolverusingPSIM405
7.8 Summary422 MultipleChoiceQuestions427 References432
8Electricdrivesusedinelectricvehicleapplications435
8.1 Introduction435
8.2 RoleofelectricmotordrivesinEV’s437
8.3 BlockdiagramofEV441
8.4 DCmotorforEVs443
8.5 InductionmotorforEV’s448
8.6 PMSMforEV’s453
8.7 BLDCmotorforEVs455
8.8 SwitchedreluctancemotordrivesforEV’s459
8.9 SynchronousreluctancemotordrivesforEV’s465
8.10 FuturetrendsofmotordrivesinEVapplications466
9.1 Introduction479
9.2 Requirementofdrivesindrinkingwaterproduction486
9.3 Requirementofdrivesindrinkingwaterdistribution487
9.4 BenefitsofVFDdrivesinirrigationpumping487
9.5 Requirementofdrivesinwastewatercanalizationsystem494
9.6 InductionmotordriveforPVarrayfedwaterpumping497
9.7 SolarPV-basedwaterpumpingusingBLDCmotordrive497
9.8 Solararrayfedsynchronousreluctancemotor-drivenwaterpump499
9.9 Permanent-magnetsynchronousmotor-drivensolarwater-pumpingsystem500
9.10 Switchedreluctancemotordrivesforwaterpumpingapplications502 Practicequestions503 References504
Abouttheauthors
Dr.V.Indragandhi completedBEinElectricalandElectronicsEngineeringfromBharadhidasanUniversityintheyear2004.Shereceivedthe MEdegreeinPowerElectronicsandDrivesfromAnnaUniversityand wasawardedGoldMedalfortheachievementoftheUniversity’sfirstrank. Subsequently,shewasawardedadoctorateofphilosophyatAnnaUniversity, Chennai.Atpresent,sheisworkingasanAssociateProfessorintheSchool ofElectricalEngineering,VIT,Vellore,TamilNadu.Shehasbeenengaged inteachingandresearchworkforthepast15yearsintheareaofPower ElectronicsandRenewableEnergySystems.
Shehasauthored110researcharticlesinleadingpeer-reviewedinternationaljournalsandpublishedarticlesinreferredhigh-impactfactorjournals. Shefiledthreepatentswithherresearchideas.Recently,herbookwas published,anddetailsaregivenas SoftwareToolsfortheSimulationofElectrical Systems,ISBN9780128194164,AcademicPress,2020.Sheorganizedmany internationalconferences/workshopsincollaborationwiththetopleading universitiesintheworldsuccessfully.Also,shereceivedatravelgrantfrom DSTforattendingaconferenceatNTU,Singapore.Moreover,shereceived fundsfortworesearchprojectsundertheVITSEEDgrantscheme.She visitedmanycountriesforherresearchdiscussionsandcollaborationsaswell. IndragandhireceivedthebestresearcherawardfromNFED,Coimbatore, andfromVITforherqualitypublications.
R.Selvamathi completedhergraduateprograminElectricaland ElectronicsEngineeringfromMaduraiKamarajUniversityandherpostgraduateprograminAppliedElectronicsfromAnnaUniversity.Shewas awardedadoctorateofphilosophyinthefieldofTransformerlessinverter forSolarApplicationsatVelloreInstituteofTechnology,Vellore,inthe year2020.Atpresent,sheisworkingasanAssociateProfessoratAMC EngineeringCollege,Bangalore.Shehasmorethan16yearsofteaching experience.HerresearchinterestsincludePowerElectronicsandRenewable energysystems.
V.Subramaniyaswamy iscurrentlyworkingasProfessorintheSchool ofComputing,SASTRADeemedUniversity,India.Intotal,hehas18years ofexperienceinacademia.HehasreceivedtheBEdegreeinComputer ScienceandEngineeringandMTechdegreeinInformationTechnology fromBharathidasanUniversity,India,andSathyabamaUniversity,India,
respectively.HereceivedaPhDdegreefromAnnaUniversity,India,and continuedtheextensionworkwiththeDepartmentofScienceandTechnologysupportasaYoungScientistawardholder.Hehascontributed papersandchaptersformanyhigh-qualitytechnologyjournalsandbooks beingeditedbyinternationallyacclaimedprofessorsandprofessionals.He haspublishedmorethan150papersinreputedinternationaljournalsand conferences.Heisonthereviewerboardofseveralinternationaljournalsand hasbeenaprogramcommitteememberforseveralinternational/national conferencesandworkshops.HealsoservesasaGuestEditorforvarious specialissuesofreputedinternationaljournals.HeisworkingasaResearch SupervisorandaVisitingExpertatvariousuniversitiesinIndia.Hehasfiled fivepatentswithhisresearchideasandproducedfourPhDcandidatesas well.HistechnicalcompetencieslieinRecommenderSystems,SmartGrid, InternetofThings,MachineLearning,BigDataAnalytics,andRenewable EnergySystems.
Preface
Simulationisthefirststeptowardimplementation.Fortheinvestigationof novelsystemdesigns,retrofitstoexistingsystems,andsuggestedmodificationstooperatingregulations,simulationisapowerfultool.Avalidsimulationisbothanartandasciencetocarryout.Learningelectricalscience softwaretoolsprovideaninteractiveplatformfornumericalcomputation, visualization,andprogramming.Studentsmustalsoworkwithavarietyof circuittopologiesanddesigncircuitsthatareappropriatefortheapplications. Theywillneedastep-by-steptutorialtohelpthemsimulatecircuits.
Thedynamicperformanceofopen-andclosed-loopACandDCdrives isassessedusingcomputermodelsofelectricmachinespresentedinthis book.Becauseoftheirinherentintegrationofvectorizedsystemrepresentationsinblockdiagramform,numericalanalysismethods,agraphicaldepictionoftimeevolutionsofsignals,andsimpleimplementationofcontroller andpowerelectronicexcitationfunctionality,theSimulink/MATLABand PSIMimplementationsareused.Simulinkmodelsofdriveassembliesmay becreatedveryeasilybymerginginput–outputblockrepresentationsof themanycomponentsthatmakeupthesystem.Thesimplicitywithwhich theeffectsofparameterchangesandchangesinsystemconfigurationsand controltechniquesmaybeobservedmakesthisapproachastrongdesign tool.
Thebasicsofelectricmotordrivesandtheirapplications,aswellastheir simulationusingMATLABandPSIM,arecoveredin-depthinthisbook.It teachesengineersandstudentshowtosimulatevariouselectricdrivesand theirapplications,whichhelpsthemtoenhancetheirsoftwareskills.Itis aimedparticularlyataspiringengineers,researchers,andindustrialengineers workinginthesubjectofpowerelectronicsanddrives.Thisbookshouldalso appealtopracticingengineerslookingforaquickintroductiontosimulation softwareinavarietyofsettings.
Thisbook,onapopulartopic,isdirectedatengineeringstudents whouseorplantousesimulationsoftwaretoolsforDCandACdrives andtheircontrol.Furthermore,thisbookisuniqueinthatitcoversthe creationofsimulationmodelsforpowerelectronicconverterfeddrives usingallavailablesoftware,includingMATLABandPSIM.Alsocoveredare operation,simulation,andapplications,withnumerousexamplesandstepby-stepinstructions.Furthermore,thelastchapterofthisbookcoversdrives
utilizedinwaterpumping,whichwillbeofgreaterusetoreadersconducting energysystemstudy.Furthermore,eachchapterincludescompletesimulated circuitsofactualproblemswithproceduresaswellasunresolvedproblems forpractice.
Thereareninechaptersinthebook.Thefirstchaptercoversthe fundamentalsofelectricdrivesandtheirmajorcomponents,aswellasthe MATLAB/Simulinklibrary.Chapter2introducestheconceptofconverterfedDCdrivesandincludessimulationsinMATLAB/Simulink.Chapter 3walksyouthroughthestepsofsimulatingchopper-feddcdrivesin MATLAB/Simulink.InChapter4,youwilllearnhowtoregulateinduction motorswithdifferentapproachesutilizingPSIMandMATLAB/Simulink. Chapter5coversvoltagesourceinverterandcurrentsourceinverterfed synchronousmotors,aswellasloadandlinecommutatedcycloconverter fedsynchronousmotordriveinMATLAB/Simulink.BrushlessDCmotor drivesusingvariouscontrolapproaches,includingMATLAB/Simulinkand PSIMcircuits,areexaminedinChapter6.Permanentmagnetsynchronous motorcontroliscoveredinChapter7usingbothMATLAB/Simulink andPSIMcircuits.Theroleofelectricmotordrivesinelectricvehiclesis discussedinChapter8.MATLABsimulationisoftenusedtodiscussdifferent motordrivesinelectricvehicles.Futuremotordrivingtrendsinelectric vehicleapplicationsarealsodiscussed.Theuseofdrivesintheproductionof drinkingwater,distribution,irrigation,andwastewatercanalizationsystems isdetailedinChapter9.MATLABsimulationsareavailableforsolarPVbasedwaterpumpingsystems.
Acknowledgments
Dr.V.Indragandhi wishestothankherhusband,Mr.ArunachalamM., anddaughterSubikshafortheirmotivationandlovablesupporttofinishher work.Shededicatesthebooktoherfatherandmother,whoisthebackbone forallhersuccesses,andspecialthankstoherbrotherforhisguidanceand specialthankstoSachith,Girish,andMoulishforcherishingheralways.
Dr.R.Selvamathi wishestothankherhusbandMr.Srinivasanandson Navatej,fortheirconstantsupportinbeingpatientandgivingherallthe love,time,andspacetofinishherwork.Shededicatesthebooktoherfather Mr.RamachandranandmotherMs.Kalyaniwholaidthefoundationforall hersuccessesandspecialthankstoherbrotherMr.Sundararajan.
Dr.V.Subramaniyaswamy wouldliketotakethisopportunityto acknowledgethosepeoplewhohelpedincompletingthisbook.Heis thankfultohiswife,RajaBrindhaN.,forherconstantsupportduring writing.HewouldliketoexpresshisspecialgratitudetohissonsS.JaiGirish andS.JaiMoulishforbeingpatientandgivinghimallthelove,time,and spacetofinishthework.HewishestothankhisfamilymembersA.Subiksha andV.Indragandhifortheirconstantsupport.Hededicatesthebooktohis fatherMr.Vairavasundaram,andhismotherMrs.Chellammal,wholaidthe foundationforhissuccesses.
CHAPTER1
Introductiontoelectricdrives andMATLABdriveblocks
1.1Introductiontoelectricdrives
Aoperationofanelectricalmachineisknownasanelectricdrive.Asakey sourceofelectricity,thisdriveusesaprimemoversuchasagasolineengine, otherwisediesel,steamturbines,otherwisegas,electrical,andhydraulic motors.Theseprimemoverscanprovidemechanicalenergytothedrive systemformotioncontrol.Anelectricdrivecanbeconstructedusingan electricdrivemotorandacomplexcontrolmechanismtocontrolthe rotationshaftofthemotor.Atthemoment,softwareisallthatisneeded tomanagethis.Asaconsequence,regulationismoreaccurate,andthedrive principleisofteneasytoimplement.
Whenwehearthewords“electricmotor”or“electricgenerator,” wealwaysassumethatthespeedatwhichthesedevicesrotateissolely determinedbytheappliedvoltageandfrequencyofthesourcecurrent. However,byusingtheprincipleofdrive,anelectricalmachine’srotational speedcanbepreciselyregulated.
Thebiggestbenefitofthisapproachisthatmotioncontrolcouldbe convenientlyprogrammedwiththeaidofadrive.Electricaldrives,toputit simply,arethemechanismsthatgovernthemovementofelectricaldevices. Atraditionaldrivesystemconsistsofanelectricmotor(orseveral)and acomplexcontrolsystemthatregulatesthemotorshaft’srotation.This monitoringcannowbeaccomplishedeffectivelywiththehelpoftech.As aresult,thecontrolbecomesmuchmoreprecise,andthisdriveprinciple oftenofferseaseofuse.
Industrialmotordrive:Electricmotorscanbeusedinavarietyof products,includingwashingmachinesandrefrigerators,aswellasmeans oftransportationsuchasautomobilesandaircraft.Electricalmotorsareresponsibleforalloftheeverydayconvenienceswetakeforgranted.Historical personalitiesandbusinessleaderssuchasWernervonSiemens,ThomasAlva Edison,NikolaTesla,andGeorgeWestinghouseinventedthefirstmotorsin theearlynineteenthcentury.Everydaylifewillbeimpossibletoconceive withoutelectricmotors.
However,themotorsintheindustrythatenabledtheassemblyline conveyorbeltsusedtoassembleconsumergoodsandthemotorsbuilt intotheautomaticweldersusedintheautomobileindustryareperhaps evenmoresignificant.Motorsarealsousedinavarietyofotherindustries, includingmedicine,aerospace,andrenewableenergy.Electricalmotorsare usedintwodifferentapplications.Thefirstscenarioinvolvesmotorsthat arewiredtothegridandrunataconstantrotorrpm.Thesecondisthe vastrangeofapplicationsinwhichmotorsmustbecontrolledatvarious speedsandtorques.Thisapplication,alsoknownasavariablefrequencydrive (VFD),necessitatestheinstallationofapowerconversionunitbetweenthe gridandtheengine.
1.2Importanceofelectricdrives
Electricaldriveshavenumerousadvantagesoverotherdrives.Theadvantagesofelectricaldrivesareasbelow: Theylastlongerthanmosttypesofdrivesystems. Theyarepollution-freeandtheydonotusefluegases. Whichismorecost-effective. Thereisnorequirementforgasolinestorageortransportation. Itisveryeffective. Thereareavarietyofspeedcontroloptionsavailable. Theytakeuplessspace. Itisadependableandcost-effectivepowersource. Itcanbemanagedfromadistance.
Speed,torque,andpowerareonlyafewoftheparametersavailable.
Transmissionlinescancarryelectricalenergyoverlongdistances.
Industrialmotordrives:Modernglobalmanufacturingisbuiltonthe basisofmotordrives.Theyarewellcovered,buttheyplayanimportant roleinsectorsthatcontributetoamoreprosperousenvironmentand wayoflife.Drivesaremostoftenusedtodaytopowerfans,pumps,and compressors.Around75%ofalldrivesinusearoundtheworldareforthese purposes.
ACdrives,adjustablespeeddrives,adjustablefrequencydrives,VFD, variablespeeddrives,frequencyconverters,inverters,andpowerconverters areallnamesformotordrives.Drivescanregulatethespeedofanelectrical motorbychangingthefrequencyandvoltageofthepowersupply,allowing themtoimproveprocesscontrol,minimizeenergyconsumption,produce energyeffectively,ormaximizetheoperationofdifferentapplicationsthat relyonelectricmotors.Driveswillalsomonitortheramp-upandrampdownofamotoratstart-upandstop,respectively.Thisreducesmechanical tensioninmotorcontrolsystemswhilealsoimprovingrideefficiencyin elevators,forexample.
Motordrivesmayalsobeusedtoconvertenergyfromnaturaland renewablesourcessuchasthesun,wind,andtidesandsendittothe powergridoruseitlocally.Motordrivesareusedinhybridsystemsto incorporatetraditionalenergysourceswithenergystoragetocreateoverall energyefficiencystrategies.
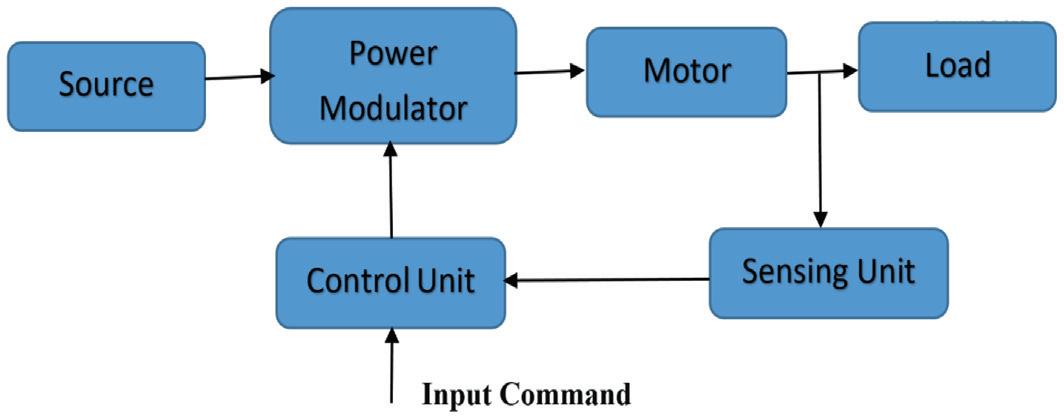
1.3Basicblockdiagramofelectricdrives
Theillustrationdepictstheelectricaldrive’sblockdiagram(Fig.1.1).The electricalmotoristhecomponentoftheelectricalload,suchasfans, generators,trains,andsoon.Thespeedandtorquerequirementsofan electricalloadarecalculated.Fortheloaddrive,themotorthatbestmatches theload’scapabilityisselected.
Figure1.1 Electricdrivesblockdiagram.
Partsofelectricaldrive—Themainpartsoftheelectricaldrivesarethe powermodulator,motor,controllingunit,andsensingunits.Theirpartsare explainedbelowindetail.
Powermodulator—Thepowermodulatorcontrolsthesource’soutput power.Itdirectspowerfromthesourcetothemotorinsuchawaythatthe motortransmitstheload’snecessaryspeed-torquecharacteristic.Theexcess currentpulledfromthesourceisreversedduringtemporaryoperationssuch asstarting,braking,andspeedreversal.Theexcessivecurrentdrawnfromthe sourcecancauseittooverloadordropinvoltage.Asaresult,thesourceand motorcurrentsarelimitedbythepowermodulator.
Thepowermodulatortransformsenergyaccordingtothemotor’sneeds, forexample,ifthesourceisDCandthemotorisaninductionmotor,the powermodulatorconvertsDCtoAC.Italsodetermineswhethertheengine isinmotoringorbrakingmode.
Controlunit—Thepowermodulator,whichworksatlowvoltageand powerlevels,isregulatedbythecontrolunit.Thepowermodulatorisalso regulatedbythecontrolunit.Italsoproducescommandsforthemotor’s safetyandthepowermodulator.Aninputordersignalfromaninputtothe controldevicethatadjuststheoperatingpointofthedrive.
Sensingunit—Itdetectsmotorcurrentandspeedaswellasotherdrive parameters.Itisprimarilyusedforeithersafetyorclosed-loopservice.
Source—AnyACorDCsourceinthedevicemaybeusedasasource. Inmostlocations,1-or3-phase,50HzACisusedinthedrivemechanism. Low-powerdrivesaretypicallypoweredbyasingle-phasesupply,whereas high-powerdrivesaretypicallypoweredbyathree-phasesupply.Anyofthe drivesarealsodrivenbyabattery.
Electricalmotor—Inmostsystems,amotorisusedtotransformelectrical energyintoelectricalenergy.Inductionmotorsareusedinelectricdrives. Synchronousmotors,DCmotors,steppermotors,andreluctancemotorsare allexamplesofmotors.Inductionandsynchronousmotorswerepreviously onlyusedforconstant-speedapplications.However,owingtoadvancements innewcomputingdevices,ACmotorsarenowusedinvariablespeeddrives. Inbatterydrives,DCmotorsareused.
Load—Somethingthatabsorbsenergyisreferredtoasaload.Fans, blowers,generators,robots,andcomputersareexamplesofequipmentthat performaspecificpurpose.Motorsandsourcesmaybeselectedbasedon loadspecifications.Industrial,residential,rural,andothertypesofloadsare allcategorizedinthisway.
1.4Applicationsofelectricdrives
1.4.1Machinetooldrives
Aplain,moreorlessconstantspeeddriveisrequiredbymanymachinetools. Squirrel-cageinductionmotorswithbasicmanualcontrolsaresufficientfor this.Gearboxesandsteppedpulleysareusedtotransmitpowertocutting instrumentsorworkpartsatafiniterangeofspeeds.Theuseofagear systemcausesvibrationsandnoise,whichreducesmachiningprecision.If step-lessspeedcontrolisused,itcanimprovesystemtimingandfinish.
Toachievetheoptimalsmoothspeedmodulation,electro-hydraulicand electromagneticcontrolsareused.Thesemethodshavebeenpartlyreplaced bythyristor-controlleddrives.Becauseoftheirhighcost,thyristorizeddrives arecurrentlyonlyusedinspecializedmachinetoolsinourregion.
Incertainsituations,changingpolesispreferabletomovinggears.Ifmore thantwospeedsareneeded,two-polechangingwindings,suchas4/8and 6/12poles,canbeusedinthesamestatorslottoprovidespeedsintheratio of1:1.5:2:3.Smallverticaldrillingmachinesbenefitfromsuchanengine.
Incertainsituations,suchasinwoodworkingmachinery,speedsexceeding3000rpmareexpected.Adirectdriveisfavoredoverageareddrive, butwitha50Hzsupply,onlycommutatormachinescandothis.Ifthere aremanyofthesedrives,aninductionformfrequency-changershouldbe installedtoprovidehighfrequencies(100Hzand/or150Hz).Thisenables theuseofcomparativelyinexpensiveanddurablesquirrelcagemotorsat speedsreaching6000and9000rpm,respectively.
Variablespeedisusedbysomedrives.TheWard-Leonarddesignis superiorforalargerspeedrange,butithasnowbeensurpassedbyaless expensivesolution,suchasarectifier-DCmotorhybrid.Afield-controlled DCshuntmotorissufficientforasmallerspeedrange,andifaDCsupply isnotusable,afree-firingrectifiermaybeused.Variable-speeddrivesmay alsouseACcommutatormotorswithinductionregulatorsorbrush-shifting speedmodulation.
Fastfrequency,three-phaseinductionmotorswithspeedsupto 180,000rpmandrelativelyhighoutputforcesinlimitedsizesareusedfor internalgrindingspindlesforhorologicalpurposes,drillingofprintedcircuit boards,andotherapplications.Forhigh-speedgrinderdrives,typicalratings are1.2kWat120,000rpmand0.5kWat150,000rpmforhigh-precision horologicalapplications.
Brakingtorquesareneededinsomeapplications.Manymotorsusedin machine-tooldriveshavesmallenoughratingsthatcapacitorscanbeused
forbrakingwithoutbeingtoolargeorexpensive.TheWard-Leonardset’s regenerativebraking,inadditiontoitsotheradvantages,isparticularlyuseful whenthereisalotofresistance,suchasinplanning-machinedrives.
1.4.2Cranesandhoistmotor
Theprimerequirementofacraneorhoistorliftingmotoristhatitshould producehighstartingtorqueandbeabletocarryoutseveraltransitions. CranesfavorDCseriesorcompoundwoundmotorsbecauseoftheirfaststartingtorqueandsmoothspeedcontrol.DCcompoundwound,Dcseries wound,andAcslip-ringinductionmotors(withrotorresistancecontrol)are usedforraising,traveling,andreversing,aswellasconveyingandhoisting.
Hoistmotorsareequippedwithspecialelectromechanicalbrakesthat, bytheuseofsprings,aredesignedtosupporttheloadintheeventofa poweroutage.Whencontrolisrestored,thebrakesarereleasedbyenergizing asolenoidattachedacrossthemotor’sterminals.Suchmotorsarehalf-or one-hourrated,producingstartingtorquetwicethatoffull-loadtorque, andaredurableenoughtowithstandtheextremestressestowhichtheyare subjected.
1.4.3Lifts
Highsmoothacceleratedtorque(twicethefull-loadtorqueatstart),high overloadpowerandpull-outtorque,ahighdegreeofquiet,andamoderate speedareallrequired.Itispossibletotypicallyexpectbetween150and 200hofoperationbeforefailurefor1h-ratedmotors.Thevastmajority ofDCwoundandACslip-ringinductionmotorsaremadeusingleadacidbatteries.ForcedinductionandvariablespeedACcommutatormotors, inductionrepulsionandvariableinductioncommutationareboth.Insinglephaseassembly,ashuntmotor,acommutatormaybemounteddirectlytothe motor.Theshuntfieldwilleithervaryorberegulatedtoprovideconstant speeddependingontheamountofcurrentdraworthecurrentdraw withrespecttovoltagechanges(WardLeonard).copperslip-ringpolyphase slip-ringinductionmotorshavealimitingspeedthatcanberegulatedby resistanceandvariesaccordingtocopperfailure(I2 Rloss).
1.4.4Lathes,milling,andgrindingmachines
Typically,lathesarepoweredbysquirrelcageinductionmotorswithconstant rpm.Occasionally,variable-speedACmotorsorvariable-speedDCmotors areused.Millingmachinesareusuallypoweredbysquirrelcageinduction
motorswithconstantspeedcontrol.Largermachines,suchasplaner-style millingmachines,haveindividualmotorsforeachmillingheadandeachfeed motion.Thecommonruleistodrivetheheadstockwithadjustablespeed motorsandthewheelswitheitherconstantoradjustablespeedmotors.Frequently,separatemotorsareusedtofeedthewheelinrelationtothework.
Grindingmachinerydifferssignificantlyintermsofconstruction.The generalruleistodrivetheheadstockwithadjustablespeedDCmotors,the wheelswithconstantspeedsquirrelcageoradjustablespeedDCmotors, andthetraversewithconstantspeedsquirrelcagemotors.Bench,pedestal, andcentrelessgrindersaredrivenbyconstantspeedsquirrelcageinduction motorswiththegrindingwheelsmounteddirectlyonthemotorshaft extension.
1.4.5Planers
Aplanerismadeupofabedandaplatenthatrollsforwardandbackward onthebed.Aclampedtoolthatisstationaryontheplatenpreparesthe job;attheendofthestroke,thetoolswingsslightlytocreateanewcut. Duetotheslowcuttingstrokeandtherapidreturnstroke,variablespeed, reversingmotorsareneeded.Whereadirectcurrentsupplyisused,ashunt orcompoundwoundmotorisused;whenanalternatingcurrentsupplyis used,aslip-ringinductionmotorisused.
1.4.6Punches,presses,andshears
Thehighpeakloadsandhighstartingtorqueareuniquefeatures.These areoftenfittedwithflywheelstomeettransientpowerdemands.Motors usedinthesedevicesshouldhaveadroopingspeed-torquecharacteristic thatenablesthemotortoslowdownwhenconfrontedwithheavyloads. Theseapplicationsincludehigh-slipsquirrelcageinductionmotors,slipringinductionmotors,orDCcumulativecompoundmotors.
1.4.7Frequencyconverters
Convertersarepoweredbysquirrelcageinductionmotorsandsynchronous motors.Nowadays,staticfrequencychangersarebeingusedmoreoften, owingtorecentadvancementsinthefieldofsilicon-drivenrectifiers.
1.4.8Aircompressors
Inductionmotorswithslipringsandsynchronousmotorsaretypicallyused inlarge-scaleunits.Ifengineeredproperly,thelattertypecanbeusedfor
powerfactorcorrectioninadditiontodrivingaircompressors.Squirrelcage inductionmotorsareonlysuitableforusewithsmallcompressors.
1.4.9Electrictraction
DCseriesmotorsaredesignedtobesimpleandcompact,withfast-starting torqueandsmoothspeedcontrol.Theyareidealforallformsofservicesbut areespeciallywellsuitedforresidentialservicesthatneedahighdegreeof acceleration.Single-phaseACcompensatedseriesmotorsarewidelyused formainlineworkbecausetheyhavesimilarspeed-currentandspeed-torque characteristicstoDCseriesmotors.Thesemotorsarenotsuitedforsuburban serviceswithregularstopsduetotheirlowstartingtorque.
1.4.10Pumps
Typically,drip-prooforfullysealedsurface-cooledpolyphaseinduction motorsareused,whichareoftenplacedonastandardbedplateandare directlycoupledtothepump.Occasionally,theengineisplacedonaflange. Asthespeedexceedsthelimitofthesetmotorspeed,aV-beltdriveis used.Squirrelcagemotorsequippedwithreducedvoltagestartersareused incentrifugalpumpswheretheneededstartingtorqueisapproximately 40%–50%ofthefull-loadtorque.Slip-ringinductionmotorsareusedto startreciprocatingpumpsthatneedbetween100%and200%offull-load torque.
1.4.11Refrigerationandairconditioning
Inrefrigeration’svaporcompressionscheme,themotordrivingthecompressoristhermostaticallyregulated.Whentheengineisrestarted,itmust operatethecompressoragainstahighheadload.Asaresult,themotorused shouldbecapableofproducingstartingtorqueequaltoorgreaterthantwo totwoandahalftimesthefull-loadtorque.
Forsmallunits,single-phase,230V,capacitor-typeinductionmotorswith D-O-Lstartersareusuallyused.Forbigsystems,squirrelcageinduction motorsorslip-ringinductionmotorswithahightorqueratingareused. Asynchronousmotordrivingaturbo-compressormaybesuitableforvery largeplants,particularlyifpowerfactorcorrectionisalsoneeded.
1.4.12Beltconveyors
Sandandgravelaremovedusingbeltconveyors.Accelerationoflargeloadsis expected.Weusedoublecageinductionmotorswithdirect-on-linestarters
orwoundrotorinductionmotorswithanormalstartingcurrentandahigh startingtorque.Thesemotorsmustbefullysealedandsurfacecooleddue tothepresenceofgritanddustintheatmosphere.
1.4.13Woodworkingmachinery
Unlessthereisapossibilityofthemotorbeingcoveredinsawdust,screenprotectedmotorsaretypicallyused.Inlocationswhereamotorcanbecome buriedinsawdust,afullysealedsurfacecooledmotorisused.Ifahigher speedthan3000revolutionsperminuteisdesired,inductionmotorsin combinationwithaninductionstylefrequencyconverterorcommutator motorsmaybeused.
1.4.14Printingmachinery
Squirrelcageinductionmotorsareusedinprintingequipmentforcontinuousspeedworksuchasguillotines,movingplatens,andothersmalldevices. Single-phasecapacitormotorscanbeusedwherelinepowerandstarting torqueareappropriate.Twosquirrelcagemotors—oneforeachstroke—are usedinrollingpressesthatinvolveaslowforwardstrokeandashortreturn stroke.
Otherapplications,suchasrotarypresses,mayincludeDCcompound orthree-phaseslip-ringinductionmotorswithrotorresistancecontrolor ACcommutatormotors.Toinchingthepress,aponyorbarringmotoris usedtomaintainasteadycrawlingpace.
1.4.15Petrochemicalindustries
Fluidprocessingmachineryiswidelyusedintherefiningandchemical industries.Pumpshavebeenpoweredbyinductionmotorswithflowcontrol providedbythrottlingvalvesasnecessary.Accordingtofigures,atypical refinerywastes30%ormoreofitselectricalenergyduetothethrottling effectofcontrolvalves.Adjustable-speedpumping,ontheotherhand,isvery economicalduetothelowerenergyusageandoperatingcostsassociated withmultispeedinductionmotorsorinverter-fedinductionmotors.
Othercriticalactivitieswithinthepetrochemicalindustry’smanufacturingprocessesincludegasliquefaction,compression,refrigeration,andheat recovery.Compressordrivesystemsarecriticalcomponentsofsuchplants. Themajorityofdrivesrunatasteadyspeedandareequippedwitha4-or 6-polemotorandstep-upgear.
Synchronousmotorswithcylindricalrotorsequippedwithbothexcitationandstartingwindings(damperbars)arechosenforhighratings.These motorsareengineeredspecificallytoaccommodatetheoscillatingtorques producedduringasynchronousaccelerationasaresultoftherotor’smagnetic andelectricalanisotropyandspecialcoolingconditions.
1.4.16Sugarmills
Acentrifugeisusedinsugarmillstoseparatecrystallizedsugarfromsyrup collectedfromasteamevaporatorandtodryitoutusingcentrifugalpower. Charging,intermediaterotating,spinning,regenerativeandreversecurrent braking,andploughpluggingareallfunctionsinvolved.Allofthesetasks mustbeexecutedatvaryingspeeds,rangingupto1:30.
Themotorsusedforthispurposeareusuallyfour-speed,polechangingmotorswithtwosetsofstatorwindings.Thisconfiguration enablesthemtoachievesynchronousspeedsof1500/750/214/107rpmor 1000/500/214/107rpm.Theyarenotonlycapableofsupplyingthedesired setspeedsofoperationbutalsoofrestoringsomeenergytothesupply mainsduringregenerativebraking,whichisachievedbytransitioningfrom alowerpoletoahigherpoleoperation.
Theoperationofreversecurrentbrakingresultsinaploughingspeed ofabout50rpm.Automaticdutycyclemanagementisaccomplishedby feedingthecontrolequipmentdirectlyfromtheoutputofatachgenerator coupledtothecentrifugemotor.
Centrifugemotorsareconstructeddifferentlyfromothermotors.They areinstalledverticallytoensurepropercouplingwiththecentrifugeshaft. Largerairspacescanbeusedinthemotorstocompensateforpotential rotoroscillationsabouttheverticalaxis.Motorinsulationmustbemoisture resistantinordertoworkeffectivelyinahumidclimate.Thermalelements foundinthewindingsshieldtheenginefromoverheating.
Theseelements,whichareoftenreferredtoassensothermsinthetrade, workafewdegreesbelowthewinding’smaximumpermittedtemperature. Thermalcomponentsoperateinoneoftwoways:theyeitherdirectlytrip themotororprovidevisibleandaudiblewarningsignalsthattheservice cyclehasbeencompleted.Followingthis,thenextcyclecannotbeginuntil themotor’stemperaturehasreturnedtonormal.
1.4.17Cementmills
Thestartingtorqueofbigcementplantmillmotorsislimitedto125%of full-loadtorque,whilethepull-outtorqueislimitedtoapproximately240%
offull-loadtorque.Typically,6.6kVslip-ringinductionmotorswithliquid resistancestartersareused.Gearboxesareusedtoachievethedesiredmill speedofapproximately15rpm,andpowerfactorcorrectionisaccomplished bytheuseofhighvoltagecapacitorsofsufficientreliability,mechanical capacitorcontrolswitchgear,andcircuitbreakers.
Owingtothehighratings(over3000kW)neededforrawandcement milldrivesandthescarcityoflargesizegearboxesandmotors,twindrives areused—thetwomotorsusedintwindrivesmustbenearlyidentical,as musttheirliquidresistancestarters.
Therotarykilnisanintegralpartofthecementmanufacturingprocess. Theenginesusedtopowerthekilnsrangeinpowerfrom100to1000kW. Thekiln’soptimumspeedisapproximately1rpm,andtherequiredspeed rangeisapproximately1:10.Theneededstartingtorquecouldbebetween 200%and250%oftheratedtorque.Initially,variablespeedACcommutator motorswereusedforkilndrives;however,ACcommutatormotorshave beenphasedoutinfavorofWard-Leonarddrivesduetotheirhighcostand maintenancerequirements.Nowadays,DCmotorswithstaticpowersupply arewidelyused.Tokeepupwiththegrowingcapacityofkilns,thecurrent trendistousetwinmotorDCdrivesinkilnapplications.
Usually,crusherdriveshaveastartingtorqueof160%ofthefullloadtorqueandapull-outtorqueof200%–250%ofthefull-loadtorque. Typically,slip-ringinductionmotorsareusedincrushers.Typically,the motorsareengineeredtoendurelockedrotorcurrentfor1minwhen operatingwithoutanyexternalresistanceintroducedintotherotorcircuit— akeyfunctiongiventhefrequencyatwhichcrushersgetstuck.
Forfandrives,thestartingtorquerequirementisapproximately120%of thefull-loadtorque,whilethepull-outtorquerequirementisbetween200% and250%ofthefull-loadtorque.Slip-ringinductionmotorswithvariable speedareusedinthesedrives.Typically,castirongridresistancecontrolsare usedtostartandmonitortherpm.Foreaseofcleaning,theslipringsand brushgearsarefullyenclosedandheldexternaltothemotorenclosures.
Typically,aircompressormotorsareratedbetween300and450kW.Inductionmotorswithsquirrelcagesorwoundrotorsmaybeuseddepending onthepowerrequirements.EnclosuresareusuallyTEFC,andspeedsrange between1000and750rpm.
1.4.18Miningwork
Electricmotorsusedincoalminesaregroupedintotwotypes:auxiliary motors,whichareusedtopowerauxiliariessuchascompressors,fans,