ARTIFICIAL INTELLIGENCEFOR FUTURE GENERATION ROBOTICS
Editedby
RABINDRANATHSHAW
DepartmentofElectrical,Electronics&Communication Engineering,GalgotiasUniversity,GreaterNoida,India
ANKUSHGHOSH
SchoolofEngineeringandAppliedSciences,TheNeotia University,Kolkata,India
VALENTINAE.BALAS
DepartmentandAppliedSoftware,AurelVlaicuUniversity ofArad,Arad,Romania
MONICABIANCHINI
DepartmentofInformationEngineeringandMathematics, UniversityofSiena,Siena,Italy
Elsevier
Radarweg29,POBox211,1000AEAmsterdam,Netherlands TheBoulevard,LangfordLane,Kidlington,OxfordOX51GB,UnitedKingdom 50HampshireStreet,5thFloor,Cambridge,MA02139,UnitedStates
Copyright©2021ElsevierInc.Allrightsreserved.
Nopartofthispublicationmaybereproducedortransmittedinanyformorbyanymeans, electronicormechanical,includingphotocopying,recording,oranyinformationstorageand retrievalsystem,withoutpermissioninwritingfromthepublisher.Detailsonhowtoseek permission,furtherinformationaboutthePublisher’spermissionspoliciesandour arrangementswithorganizationssuchastheCopyrightClearanceCenterandtheCopyright LicensingAgency,canbefoundatourwebsite: www.elsevier.com/permissions.
Thisbookandtheindividualcontributionscontainedinitareprotectedundercopyrightby thePublisher(otherthanasmaybenotedherein).
Notices
Knowledgeandbestpracticeinthisfieldareconstantlychanging.Asnewresearchand experiencebroadenourunderstanding,changesinresearchmethods,professionalpractices, ormedicaltreatmentmaybecomenecessary.
Practitionersandresearchersmustalwaysrelyontheirownexperienceandknowledgein evaluatingandusinganyinformation,methods,compounds,orexperimentsdescribed herein.Inusingsuchinformationormethodstheyshouldbemindfuloftheirownsafety andthesafetyofothers,includingpartiesforwhomtheyhaveaprofessionalresponsibility.
Tothefullestextentofthelaw,neitherthePublishernortheauthors,contributors,or editors,assumeanyliabilityforanyinjuryand/ordamagetopersonsorpropertyasamatter ofproductsliability,negligenceorotherwise,orfromanyuseoroperationofanymethods, products,instructions,orideascontainedinthematerialherein.
BritishLibraryCataloguing-in-PublicationData
AcataloguerecordforthisbookisavailablefromtheBritishLibrary LibraryofCongressCataloging-in-PublicationData
AcatalogrecordforthisbookisavailablefromtheLibraryofCongress
ISBN:978-0-323-85498-6
ForInformationonallElsevierpublications visitourwebsiteat https://www.elsevier.com/books-and-journals
Publisher: MatthewDeans
AcquisitionsEditor: GlynJones
EditorialProjectManager: FernandaA.Oliveira
ProductionProjectManager: KameshRamajogi
CoverDesigner: VictoriaPearson
TypesetbyMPSLimited,Chennai,India
1.Roboticprocessautomationwithincreasingproductivityand improvingproductqualityusingartificialintelligenceand machinelearning1
AnandSinghRajawat,RomilRawat,KanishkBarhanpurkar, RabindraNathShawandAnkushGhosh
1.1 Introduction1
1.2 Relatedwork3
1.3 Proposedwork3
1.4 Proposedmodel6
1.4.1 Systemcomponent7
1.4.2 Effectivecollaboration7
1.5 Manufacturingsystems8
1.6 Resultsanalysis10
1.7 Conclusionsandfuturework11 References12
2.Inversekinematicsanalysisof7-degreeoffreedomweldingand drillingrobotusingartificialintelligencetechniques15
SwetChandan,JyotiShah,TarunPratapSingh, RabindraNathShawandAnkushGhosh
2.1 Introduction15
2.2 Literaturereview16
2.3 Modelinganddesign17
2.3.1 Fitnessfunction17
2.3.2 Particleswarmoptimization19
2.3.3 Fireflyalgorithm19
2.3.4 Proposedalgorithm20
2.4 Resultsanddiscussions20
2.5 Conclusionsandfuturework21 References22
3.Vibration-baseddiagnosisofdefectembeddedininnerraceway ofballbearingusing1Dconvolutionalneuralnetwork25
PragyaSharma,SwetChandan,RabindraNathShawandAnkushGhosh
3.1 Introduction25
3.2 2DCNN abriefintroduction26
3.3 1Dconvolutionalneuralnetwork27
3.4 Statisticalparametersforfeatureextraction30
3.5 Datasetused31
3.6 Results31
3.7 Conclusion35 References35
4.Singleshotdetectionfordetectingreal-timeflyingobjectsfor unmannedaerialvehicle37
SampurnaMandal,SkMdBasharatMones,ArshaveeDas, ValentinaE.Balas,RabindraNathShawandAnkushGhosh
4.1 Introduction37
4.2 Relatedwork39
4.2.1 Appearance-basedmethods39
4.2.2 Motion-basedmethods40
4.2.3 Hybridmethods40
4.2.4 Single-stepdetectors41
4.2.5 Two-stepdetectors/region-baseddetectors41
4.3 Methodology42
4.3.1 Modeltraining42
4.3.2 Evaluationmetric43
4.4 Resultsanddiscussions44
4.4.1 Forreal-timeflyingobjectsfromvideo44
4.5 Conclusion51 References51
5.DepressiondetectionforelderlypeopleusingAIrobotic systemsleveragingtheNelder MeadMethod55
AnandSinghRajawat,RomilRawat,KanishkBarhanpurkar, RabindraNathShawandAnkushGhosh
5.1 Introduction55
5.2 Background56
5.3 Relatedwork57
5.4 Elderlypeopledetectdepressionsignsandsymptoms59
5.4.1 Causesofdepressioninolderadults59
5.4.2 Medicalconditionsthatcancauseelderlydepression60
5.4.3 Elderlydepressionassideeffectofmedication60
5.4.4 Self-helpforelderlydepression60
5.5 Proposedmethodology60
5.5.1 Proposedalgorithm61
5.5.2 Persistentmonitoringfordepressiondetection63
5.5.3 Emergencymonitoring64
5.5.4 Personalizedmonitoring65
5.5.5 Featureextraction65
5.6 Resultanalysis66 References68
6.Dataheterogeneitymitigationinhealthcareroboticsystems leveragingtheNelder Meadmethod71 PritamKhan,PriyeshRanjanandSudhirKumar
6.1 Introduction71
6.1.1 Relatedwork71
6.1.2 Contributions72
6.2 Dataheterogeneitymitigation73
6.2.1 Datapreprocessing73
6.2.2 Nelder Meadmethodformitigatingdataheterogeneity73
6.3 LSTM-basedclassificationofdata76
6.4 Experimentsandresults78
6.4.1 DataheterogeneitymitigationusingNelder Meadmethod78
6.4.2 LSTM-basedclassificationofdata80
6.5 Conclusionandfuturework81 Acknowledgment81 References82
7.Advancemachinelearningandartificialintelligence applicationsinservicerobot83 SanjoyDas,IndraniDas,RabindraNathShawandAnkushGhosh
7.1 Introduction83
7.2 Literaturereviews84
7.2.1 Homeservicerobot84
7.3 Usesofartificialintelligenceandmachinelearninginrobotics85
7.3.1 Artificialintelligenceapplicationsinrobotics[6]85
7.3.2 Machinelearningapplicationsinrobotics[10]87
7.4 Conclusion89
7.5 Futurescope90 References90
8.Integrateddeeplearningforself-drivingroboticcars93 TadGonsalvesandJaychandUpadhyay
8.1 Introduction93
8.2 Self-drivingprogrammodel96
8.2.1 Humandrivingcycle96
8.2.2 Integrationofsupervisedlearningandreinforcementlearning97
8.3 Self-drivingalgorithm99
8.3.1 Fundamentaldrivingfunctions99
8.3.2 Signals101
8.3.3 Hazards104
8.3.4 Warningsystems108
8.4 Deepreinforcementlearning110
8.4.1 DeepQlearning110
8.4.2 DeepQNetwork111
8.4.3 DeepQNetworkexperimentalresults112
8.4.4 Verificationusingrobocar113
8.5 Conclusion114 References115 Furtherreading117
9.Lyft3Dobjectdetectionforautonomousvehicles119 SampurnaMandal,SwagatamBiswas,ValentinaE.Balas, RabindraNathShawandAnkushGhosh
9.1 Introduction119
9.2 Relatedwork120
9.2.1 Perceptiondatasets121
9.3 Datasetdistribution123
9.4 Methodology124
9.4.1 Models125
9.5 Result132
9.6 Conclusions135 References136
10.Recenttrendsinpedestriandetectionforroboticvision usingdeeplearningtechniques137
SarthakMishraandSuraiyaJabin
10.1 Introduction137
10.2 Datasetsandartificialintelligenceenabledplatforms138
10.3 AI-basedroboticvision139
10.4 Applicationsofroboticvisiontowardpedestriandetection141
10.4.1 Smarthomesandcities141
10.4.2 Autonomousdriving142
10.4.3 Tracking143
10.4.4 Reidentification144
10.4.5 Anomalydetection144
10.5 Majorchallengesinpedestriandetection145
10.5.1 Illuminationconditions145
10.5.2 Instancesize146
10.5.3 Occlusion146
10.5.4 Scenespecificdata147
10.6 AdvancedAIalgorithmsforroboticvision148
10.7 Discussion152
10.8 Conclusions153 References154 Furtherreading157 Index 159
Listofcontributors
ValentinaE.Balas
DepartmentofAutomaticsandAppliedSoftware,AurelVlaicuUniversityofArad,Arad, Romania;DepartmentandAppliedSoftware,AurelVlaicuUniversityofArad,AradRomania
KanishkBarhanpurkar
DepartmentofComputerScienceandEngineering,SambhramInstituteofTechnology, Bengaluru,India
SwagatamBiswas
SchoolofEngineeringandAppliedSciences,TheNeotiaUniversity,Kolkata,India
SwetChandan
GalgotiasUniversity,GreaterNoida,India
ArshaveeDas
SchoolofEngineeringandAppliedSciences,TheNeotiaUniversity,Kolkata,India
IndraniDas
DepartmentofComputerScience,AssamUniversity,Silchar,India
SanjoyDas
DepartmentofComputerScience,IndiraGandhiNationalTribalUniversity,Regional CampusManipur,Imphal,Manipur
AnkushGhosh
SchoolofEngineeringandAppliedSciences,TheNeotiaUniversity,Kolkata,India
TadGonsalves
DepartmentofInformationandCommunicationSciences,SophiaUniversity,Tokyo, Japan
SuraiyaJabin
DepartmentofComputerScience,FacultyofNaturalSciences,JamiaMilliaIslamia, NewDelhi,India
PritamKhan
DepartmentofElectricalEngineering,IndianInstituteofTechnologyPatna,India
SudhirKumar
DepartmentofElectricalEngineering,IndianInstituteofTechnologyPatna,India
SampurnaMandal
SchoolofEngineeringandAppliedSciences,TheNeotiaUniversity,Kolkata,India
SarthakMishra
DepartmentofComputerScience,FacultyofNaturalSciences,JamiaMilliaIslamia, NewDelhi,India
SkMdBasharatMones
SchoolofEngineeringandAppliedSciences,TheNeotiaUniversity,Kolkata,India
AnandSinghRajawat
DepartmentofComputerScienceEngineering,ShriVaishnavVidyapeeth Vishwavidyalaya,Indore,India
PriyeshRanjan
DepartmentofElectricalEngineering,IndianInstituteofTechnologyPatna,India
RomilRawat
DepartmentofComputerScienceEngineering,ShriVaishnavVidyapeeth Vishwavidyalaya,Indore,India
JyotiShah
GalgotiasUniversity,GreaterNoida,India
PragyaSharma
G.B.PantUniversityofAgricultureandTechnology,Pantnagar,India
RabindraNathShaw
DepartmentofElectrical,Electronics&CommunicationEngineering,Galgotias University,GreaterNoida,India
TarunPratapSingh
AligarhCollegeofEngineering,Aligarh,India
JaychandUpadhyay
XavierInstituteofEngineering,Mumbai,India
Abouttheeditors
RabindraNathShaw isaseniormemberofIEEE(USA),currently holdingthepostofDirector,InternationalRelations,Galgotias University,India.HeisanalumnusoftheAppliedPhysicsDepartment, UniversityofCalcutta,India.Hehasmorethan11yearsofteaching experienceinleadinginstituteslikeMotilalNehruNationalInstituteof TechnologyAllahabad,India,JadavpurUniversity,andothersatUGand PGlevel.Hehassuccessfullyorganizedmorethan15internationalconferencesasConferenceChair,PublicationChair,andEditor.Hehaspublishedmorethan50Scopus/WoS/ISIindexedresearchpapersin internationaljournalsandconferenceproceedings.HeistheeditorofseveralSpringerandElsevierbooks.Hisprimaryareaofresearchisoptimizationalgorithmsandmachinelearningtechniquesforpowersystem,IoT application,renewableenergy,andpowerelectronicsconverters.Hehas alsoworkedasaUniversityExaminationCoordinator,University MOOC’sCoordinator,UniversityConferenceCoordinator,andFaculty InCharge,CentreofExcellenceforPowerEngineeringandClean EnergyIntegration.
AnkushGhosh ispresentlyworkingasanassociateprofessorinthe SchoolofEngineeringandAppliedSciences,TheNeotiaUniversity, India.Hehasmorethan15yearsofexperienceinteaching,research,and industry.Hehasoutstandingresearchexperienceandhaspublishedmore than80researchpapersininternationaljournalsandconferences.Hewas aresearchfellowoftheAdvancedTechnologyCell DRDO,Govt.of India.HewasawardedNationalScholarshipbyHRD,Govt.ofIndia.He receivedhisPhD(Engg.)DegreefromJadavpurUniversityin2010.His UGandPGteachingassignmentsincludemicroprocessorsandmicrocontrollers,AI,IoT,embeddedandrealtimesystems.Hehasdelivered invitedlecturestoanumberofinternationalseminar/conferences, refresherscourses,andFDPs.HehasguidedalargenumberofMTech andPhDstudents.Heisaneditorialboardmemberofseveralinternationaljournals.
ValentinaE.Balas iscurrentlyfullprofessorintheDepartmentof AutomaticsandAppliedSoftwareattheFacultyofEngineering, “Aurel Vlaicu” UniversityofArad,Romania.SheholdsaPhDinApplied ElectronicsandTelecommunicationsfromPolytechnicUniversityof Timisoara.Dr.Balasistheauthorofmorethan300researchpapersin refereedjournalsandInternationalConferences.Herresearchinterestsare inintelligentsystems,fuzzycontrol,softcomputing,smartsensors,informationfusion,modelingandsimulation.SheistheEditor-inChiefofthe InternationalJournalofAdvancedIntelligenceParadigms (IJAIP)andthe InternationalJournalofComputationalSystemsEngineering (IJCSysE),aneditorialboardmemberofseveralnationalandinternationaljournals,andis anevaluatorexpertfornationalandinternationalprojectsandPhDtheses.
MonicaBianchini receivedaLaureacumlaudeinMathematicsanda PhDdegreeinComputerSciencefromtheUniversityofFlorence,Italy, in1989and1995,respectively.AfterreceivingtheLaurea,for2yearsshe wasinvolvedinajointprojectofBullHNItaliaandtheDepartmentof Mathematics(UniversityofFlorence),aimedatdesigningparallelsoftware forsolvingdifferentialequations.From1992to1998shewasaPhDstudentandPostdocFellowwiththeComputerScienceDepartmentofthe UniversityofFlorence.Since1999shehasbeenwiththeUniversityof Siena,wheresheiscurrentlyAssociateProfessorattheInformation EngineeringandMathematicsDepartment.Hermainresearchinterestis inthefieldofartificialintelligenceandapplications,andmachinelearning, withanemphasisonneuralnetworksforstructureddataanddeeplearning,approximationtheory,informationretrieval,bioinformatics,and imageprocessing.M.Bianchinihasauthoredmorethan70papersandhas beentheeditorofbooksandspecialissuesoninternationaljournalsinher researchfield.Shehasbeenaparticipantinmanyresearchprojectsfocused onmachinelearningandpatternrecognition,foundedbyboththeItalian MinistryofEducation(MIUR)andUniversityofSiena(PARscheme), andshehasbeeninvolvedintheorganizationofseveralscientificevents, includingtheNATOAdvancedWorkshoponLimitationsandFuture TrendsinNeuralComputation(2001),the8thAI IAConference(2002), GIRPR2012,the25thInternationalSymposiumonLogicBased ProgramSynthesisandTransformation,andtheACMInternational ConferenceonComputingFrontiers2017.Prof.Bianchiniservedas AssociateEditorfor IEEETransactionsonNeuralNetworks (2003 2009), Neurocomputing (from2002),and InternationalJournalofComputersin Healthcare (from2010).Sheisapermanentmemberoftheeditorialboard ofIJCNN,ICANN,CPR,ICPRAM,ESANN,ANNPR,andKES.
Preface
Artificialintelligence(AI)isoneofthemostprevalenttopicsintoday’ s world.However,theapplicationofAIweseetodayisjustatipofthe iceberg.TheAIrevolutionhasjuststartedtorollout.Itisbecomingan integralpartofallmodernelectronicdevices.Applicationsinautomation areaslikeautomotive,securityandsurveillance,augmentedreality,smart homes,retailautomation,andhealthcarearesomeexamples.Roboticsis alsorisingtodominatetheautomatedworld.Thefutureapplicationsof AIintheroboticsareaarestillundiscoveredtomostpeople.Weare, therefore,puttinganefforttowritethiseditedbookonthefutureapplicationsofAIonsmartroboticswhereseveralapplicationshavebeen includedinseparatechapters.Thecontentofthebookistechnical.Ithas triedtocoversomeofthemostadvancedapplicationareasofrobotics usingAI.
Thisbookwillprovideafuturevisionoftheunexploredareasof applicationsofroboticsusingAI.Theideastobepresentedinthisbook arebackedupbyoriginalresearchresults.Thechaptersprovideanindepthlookwithallthenecessarytheoryandmathematicalcalculations. Thisbookisperfectforresearchersanddeveloperstoformanargument forwhatAIcouldachieveinthefuture,andthoselookingfornewavenuesanduse-casesincombiningAIwithsmartroboticsandtherebyprovidingbenefitsformankind.
RabindraNathShaw, AnkushGhosh, ValentinaE.Balasand MonicaBianchini
Roboticprocessautomationwith increasingproductivityand improvingproductqualityusing artificialintelligenceandmachine learning
AnandSinghRajawat1,RomilRawat1,KanishkBarhanpurkar2, RabindraNathShaw3 andAnkushGhosh4
1DepartmentofComputerScienceEngineering,ShriVaishnavVidyapeethVishwavidyalaya,Indore,India
2DepartmentofComputerScienceandEngineering,SambhramInstituteofTechnology,Bengaluru,India
3DepartmentofElectrical,Electronics&CommunicationEngineering,GalgotiasUniversity, GreaterNoida,India
4SchoolofEngineeringandAppliedSciences,TheNeotiaUniversity,Kolkata,India
1.1Introduction
Thegrowthinartificialintelligence(AI)androboticshascontributedtoexpandedspeculationonartificialintellectualsandstartups,more prominentjournalcoverageabouthowthistechnologyistransforming theworld,andagrowingsurgeinempiricalstudiesintotheeffectthese developmentshaveonbusinesses,staff,andeconomies [1].Theyalsohave asubstantialimprovementinresults.Inthischapter,wedefinethemain principles,reviewcurrentliterature,discussrepercussionsfororganizationaldesign,andexplainprospectsformarketanalystsandstrategyscientists.Muchworkinthisfieldhasbeenfocusedonhoweconomic developmentandlabormarketsareimpactedbyroboticuseandthe implementationofAItechnology.Despitethemajorconsequencesfor socialwelfare,thisisalsoanimportantareaforfuturestudy.Inaddition, thelackofdetailedevidenceontheimplementationanduseofAIand roboticsensuresthatmuchofthecurrentworkisnotobservationalbut dependsonexpertorcrowd-sourcedviews [2].Inthefuture,enhanced datacollectionandorganizationwouldfacilitatemoreconcretescientific researchandencourageresearcherstoexploreadjacentissueslikeperformance
DOI: https://doi.org/10.1016/B978-0-323-85498-6.00007-1
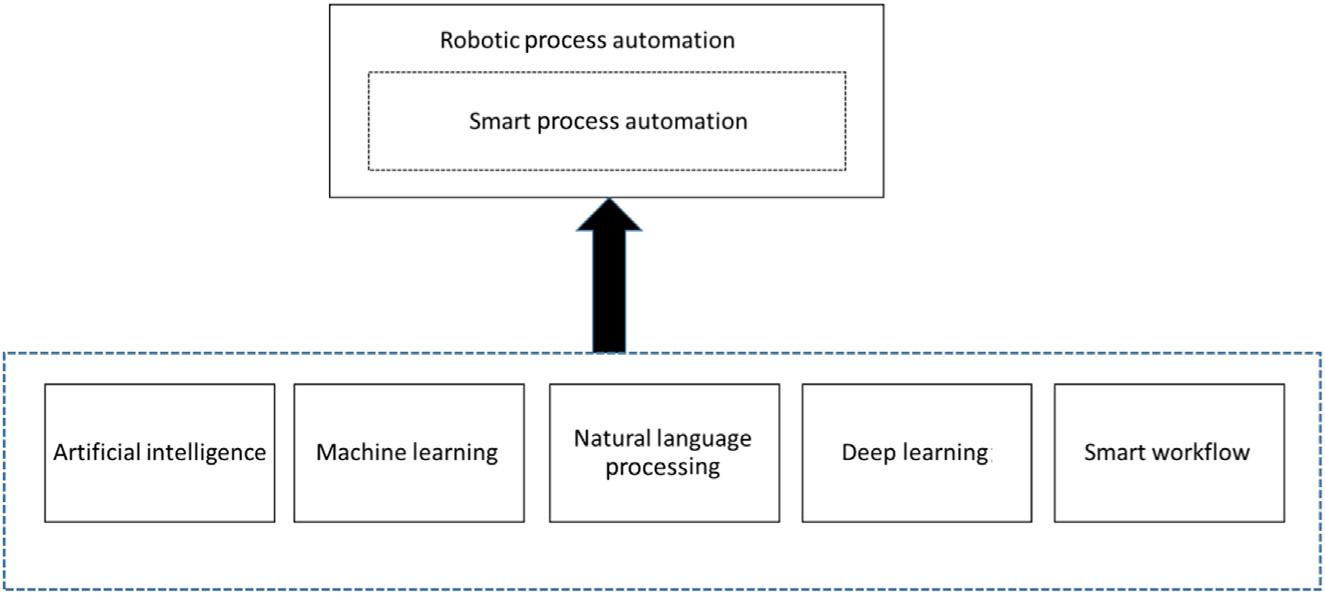
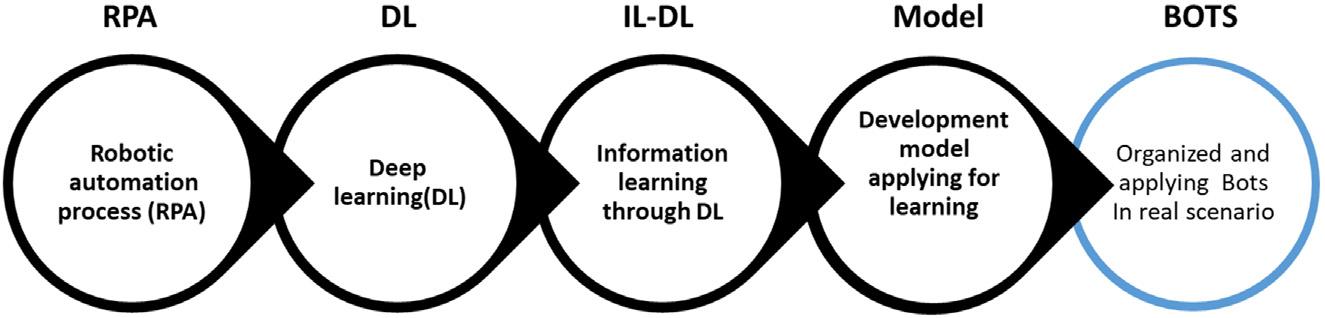
discrepanciesandlabormarketimpactsonvariousformsofroboticsand technologyforAI [3] .Weneedstudiesfocusedondataonhowthe effectofAIongrowth,jobs,andcompensationinbusinessesandonhow artificialinsightcaninfluenceeconomicresults,suchascreativity,dynamism,andinequalities,anddistributionaleffects.Organizationalanalysts andpolicyscientistshavemanytoolstohelpusconsiderhownewdevelopmentsimpactourculture.Wefocusinparticularontheseissuesas theyareespeciallyappropriateforoperationalandstrategicscientists (Fig.1.1).
Themodelshouldbecapableofansweringthefollowingquestions withrespecttoRoboticProcessAutomation(RPA):
• WhatkindsofbusinesseswillimplementrobotictechnologyandAI?
• Doanymanagementtypesorhierarchicalstructuresexistthatcanbe implementedveryquickly?
• Arethebusinessconditionsaffectingthedecisiononadoption?
• IsthereariseorareductioninAIandroboticsinprofessions,businesses,orregions?
• Areanymeasuresofmanagementorcontrolcapableofreducingor exacerbatingtheadverseeffectsofrobotics?
• HowdoestheimplementationofAIandrobotictechnologiesaffectits producers,manufacturersupstream,andconsumersinthesamesector ormarket?
• Inwhichsituationsdopotentialcompetitorscontendwithtraditional incumbentsbyusingmachinelearning(ML)orrobotics? [4]
• HowdoestheessenceofworkimpactMLandrobotics?
• Whatistherelativevalueofskillsandactivitiesrequiredforawork modifiedbyAIandrobotics?
• HowdoMLandrobotsimpacthowhumanemployeesworkonthe job?
• WhatoperationalwordsreplaceorsupplementAIandroboticsfor work?
Figure1.1 Operationalwork-flowmodelofroboticdesktopautomation.
Table1.1 Comparativetablefordifferentapplicationsandtypeoftechniqueused. StudyreferenceApplicationTypeoftechnique used
Asatianietal. [5] RoboticautomationMachinelearning
LangmannandTuri [6] BusinessprocessmanagementDeeplearning
HuangandVasarhelyi [7] AuditingMachinelearning
QiuandXiao [8] Costmanagement optimization Machinelearning
KokinaandBlanchette [9] AccountingDeeplearning
Cernatetal. [10] UItestautomationMachinelearning
1.2Relatedwork
Chakrabortyetal. [11] explainedthemosttrendingdevelopments inAIwhicharerapidlychangingthebusinessprocesses.Trappeyetal. [12] showsauniqueintelligentpatentsystemwhichprovidesapatent summarywhichwillprovideverynecessaryinsightsintoaparticularpatentandhelpinbusinessautomation.RPAincreasestheoverallefficiency ofthebusinesssystem.RPAsystemsareenabledwith “bots” functionality,whichwillinteractwithsoftwaresystemssothatitwillmanagethe humanworkload [3].Inthecontinuousprocessoftheinformationsystemsdomain,advancementinthefieldofBlockchainandIntelligentsystemsalsoplaysanimportantroleindevelopmentofRPAwhichwilllead toimprovementinproductquality [13].Aftertheinitialdevelopment, severalstepshavebeentakentoimprovetheRPAlifecycle.Auser-log systemhasbeenproposedwhichworksontheknowledgeofthebackofficesystemandcollectsdataintheformofperiodicorderofimagesand user-drivenevents.Additionally,RPAisusedtoincreaseproductivity fromthetoptobottomlevelsofmanagement(Table1.1).
1.3Proposedwork
Therobotsystemsaresignificantlygrowinginindustrialautomation andwillincreaseinagrowingrangeofsituations,drivenbyasustained needforexpandedefficiencyandbetterproductquality [14].Progressin
depthandscopeisrapidlyexpandingroboticsystemsforindustrialautomation.Therelentlesspursuitinroboticdevicesisusuallyforsaferoperatingperformance,accuracy,andreliability.Toexecuteincreasingly complicatedtasksandnavigatebroaderanddiverseworlds,highintelligenceandautonomyareimportant.Thisfocusedsegmentsearchesout state-of-the-artcontributionstosolvebasicproblemsandrealisticconcerns inallareasofindustrialautomationroboticsystems(Williametal.,2019) (Fig.1.2).
Industrialautomationincludesprototypes,preparation,andcontrol [15].Threesectionsareaccepted:schemeplanningandregulation,which seektoenhanceroboticautomation’sperformance;precision;andsolidity [16].Thearchitectureoftherobotwasoftenabigproblemforimproving robotperformance.Forparticulartasks,arobotthatcommunicateswith objectsandenvironmentsinevitablyrequiremotionplanningandreliable power.Theproposedsystemimplementsacompletemovementdesign andcontrolsystemforensuringadualarmmovement(Fig.1.3).
Figure1.2 Interactionofroboticprocessautomationandintelligentsystems.
Figure1.3 Workingprocessofroboticautomation.

Yanetal. [18] suggestedusinganeuralnetworks(NNs)algorithmfor theoptimizationofalgorithmpredictionsystemparametersinamicropositioningsystemfortheprecisemotionmonitoringofamicropositioning system.Incontrastwithtraditionalapproaches,ourproposedapproach, theControlStrategy,makestheprecisionmotionmonitoringofamicropositioningdevicecleverandmoreflexible.Byintegratingvisualinterpretation,pointcloudmechanismandawarenessrepresentation,findings indicatethatthemethodsuggestedwillachieveverystrongoutputawarenessoftheenvironment.Amovingtargetismostcommonlyseenin manyprogrammingsituations,butforroboticmanipulation,itisverydifficult.Throughfixingeachother’sfaultsconstantly,thecombinedtrackers willdecreasetheirfaults.Oncheckingframesinarequireddatabaseof maingoalistomonitorindifferentlocations,experimentalstudiesreveal that,althoughoperatingseparately.Robotscanachievegoodadaptability forperformingflexibletasksandhavehighinteractivitywithpeopleduringthelearningprocess(Fig.1.4).
Thischapterdescribestheassemblystrategyofexplorationandtransfersskillsbetweenthetasks.Thechapterwilldescribeenvironmental dynamicswithGaussianMethodduringpolicytraininginawaythat decreasessamplinguncertaintyandincreasestrainingperformance.To enhancetargetvalueestimationandtoproducevirtualdatafortransformationstudies,thetraineddynamicmodelisused.Experimentalstudies suggestthatthesuggestedsystemincreasestrainingperformanceby31% andcanbeappliedtonewactivitiestoacceleratepreparationundernew policies.Simulationsindicatethatthesuggestedapproachhasconsiderable efficacy.Insuchacomplex,dynamicsystem,differentmanipulationtasks aresuccessfullyaccomplishedandeveninasparseincentiveenvironment, sampleperformanceisincreasedastheresearchtimeisconsiderably reduced.Learningthedesiredhumandirectionormotionisacrucialyet commontopicinthephysicalcontactbetweenpersonandrobot.Itisa tailoredapproachtomaximizehumanuseonmundanejobs,asopposed
Figure1.4 Keypointsofautomationsystems [17].
totheunpopularnotionofthe “reductioninworkforce.” Aprojectfor processautomationrequiresprocessmodelingasapreconditionsinceit servesasaplanfortheproject.Theproposedmodeloffersacomprehensivebusinessprocessframeworkthatallowstheestimationofvariableslike efficiency,complexity,andfulltimeequivalentsavingsfromaspecific process.Differentcriteriaaretakenintoaccount,suchasfrequencyof transition,diversecognitiveabilityetc. [19].Wedetermineifitisappropriateforautomationbyusingthesevariablesandcriteria.Theproposed modelisstrongerthanthestandardmodelsinceitincludesmoreparametersforindividualparameters.Theproposedmodelalsoanalyzesthe mechanismfromalmosteverypossibleangletogiveamoreaccurate detaileddescription,whereasthetypicalmodel’sanalysisisincomplete andonedimensional.Ournexttasksarerefiningthemodelbytaking intoaccountfurtherdimensionsandvariables,suchascostestimates,paybacks,andadvantages,increasingthismodeltoservefurthermarketpatterns,andincreasingtheprocessmodel’sanalyticalbase.AI-based solutionstoproblemsrelevanttoroboticcommunicationareasfollows:
• Firstwespeakabouthowrobotsunderstandtheworldandtakeaction usingInternetofThingsandMLtosupporttheecosystem.
• MorediscussionwillbeofferedonthewayMLtechniquesareusedin datacollectionandroboticpartnershipsthatcontributetothedevelopmentofrobotcommunication.
• WestudythekeystrategiesandapproachestotheapplicationofML inroboticcommunicationforeffectiveandreliabletaskperformance.
• Thefuturecourseofscienceandproblemsareeventuallyunderlined.
1.4Proposedmodel
Ahugechallengeforbusinessesistounderstandhowadvantageous thisreorganizationisandhowthemoderntechnologynotesthesignificanceofweighing “depression” inactualexpressionthatimpairstheefficacyofface-to-facecontactrelativetovirtualinteraction.Likewise,new technologywouldpossiblychangetheskillsandtasksinvolvedinmany careers.Newinnovationsalonewouldreformorganizationsandpush businessestotakenewdevelopmentsintoaccount.Boundariesbetween careerswithinbusinesseswillpossiblyadjustasmanyactivitiesareautomatedandpeoplewithinorganizationswhowanttoutilizethese
technologieswilldefinitelybemoreexposedtodigitaltechnologies [20] Inaddition,theworkermakeupwilladjusttothelatestandwidely respectedvarietyofskills.Theseimprovementsareoftenlikelytobemirroredinthecorporatearchitecturewhentheyaimtoachievethehighest benefitfromtheirhumanresources.Interfirmlimitationswouldalso evolvewiththeincreasinglycommonapplicationofroboticsandAItechnology [21].Theroboticstechnologieswillminimizecostsdramatically withinbusinesses,eventuallyresultinginfewersalesinthemarket [22] Taskswhichhadbeencontractedtootherentitieseithercanbemoved in-house,orcorporationsmayfindthatotherorganizationswithbetter accessandcapabilitytothesetechnologieswillexecutemoreeasilytasks thathavepreviouslybeenperformedwithinanenterprise.Furthermore,if thetechnologyisveryuniquetotheorganizationandifthecompany facesthepossibilityofholdingbackanopportunisticdownstreamclienta companymaynotimplementemerginginnovations,suchasrobotics.No matterhowtheresulthappens,theliteratureonstrategyfrequentlyshows thatthecurrentbusinessescopewithtechnicaladvances.Despitethe obstaclesfacedbytechnologicaldisruption,incumbentswillprosperif theyare “preadapted,” withtheabilitytoexploittheirtraditionalpower andassetstobenefitfromtheemergingtechnologies,thusdemonstrating thatitwouldbeeasierforbusinessestobeagileandrespondtomodern, “smarter” robotictechnologiesifroboticrollusersweretobein-house andwithaccesstotechnicalexpertise.Ifthisresultisgeneralizable,businessescanconsiderusingindividualswithtechnologicalexpertiseand extendingtheirtechnicalknowledgefacilitytomakethemostofthepossibleadvantagesofadoption.
1.4.1Systemcomponent
Traditionally,theaerospaceengineeringindustryismanualandrobotic. Theassemblingofpartsandtheirvariouselementsisoneofthemostroutineactivities.Intensivemanuallabor,jigs,andspecialequipmentare neededforthisphase.
1.4.2Effectivecollaboration
Intheexistingproductionmethods,implementinghuman robotcooperationwouldcutcostsprimarilybyreducingspecificequipmentandtimes. Theproblemofthecriteriaforallocatingtasksbetweenpeopleandrobots iscriticalinthiscollaborativeprocess [23].Therobotexecutesrepeated
andpreciseactivitiestomaximizeitsoperatingperformance,whilethe humanbeingprovidesversatility.Theworkerexecutesamanualprocess thatisdifficulttoplan,whiletherobotcompletestheprocesswhereprecisionisrequired.Inordertoensuretheexactnessandthehuman robotic relationshipforsecurecontroldevicecoordinationthesolutionsuggested requiresadditionalcomponentsareasfollows(Fig.1.5):
• Metrologicalsensors.Forenhancingtheprecisionoftherobot,externalsensorsareused.Therobotmotionshavehighpositioningdiscrepanciesandpoordirectionreplicability.Therobotmotionscanbe fixedtoachievemoreprecisioninpositioningbyincorporatingametrologicaldevice.Afurtherargumentisthatthekeycomponentmay beplacedontheworkbenchwithnodetaileduseofametrological device.
• Safetyfunctionalities.Therobotrespondssimilarlytohumanbehavior. Sincenoobstaclesremain,protectionfunctionsneedtobeconnected totherobotdevice.Bysupplyingtechnologicaldetails,therobotassists theworkerandtheworkercontrolstherobotthroughthetouch screenregardlessofhis/herskillorability.High-levelcontactwould allowtherobottoorganizebehaviorswithnonexpertusers.
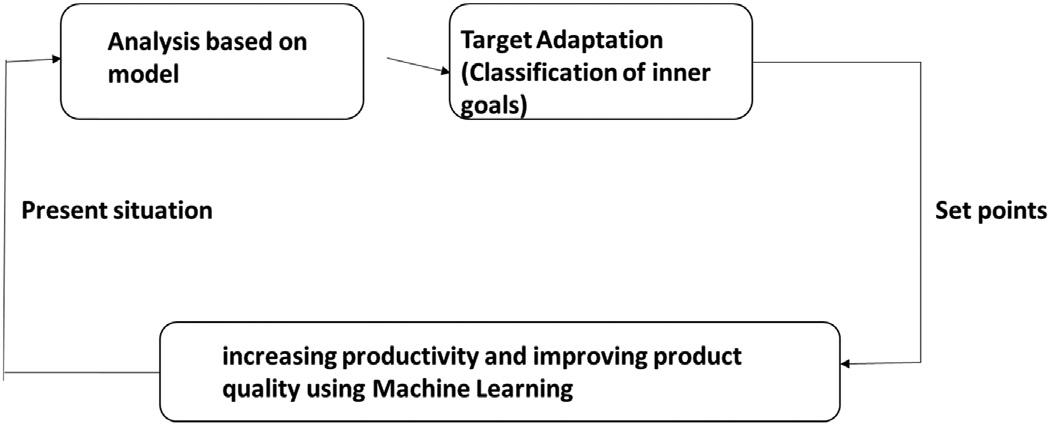
1.5Manufacturingsystems
Enhancedqualitystandardsarenecessaryforthesustainedmarket performanceofgoods.Theconsequenceoftheabsenceofcertainquality
Figure.1.5 Controlofincreasingproductivityandimprovingproductqualityusing machinelearning [24].
levelswillresultinoutputflowinterruptionsorgoodsthatdonotfulfill thecustomer’srequirements.Foreachcommodity,consistencyis describeddifferently.Inlasercutting,weightorsurfaceruggednessofthe fabricarethecharacteristicsofthefabricatedpartthatdeterminetheconsistency.Withregardtotheentirephaseofmanufacturing,thisconsistencyconceptmaybeexpandedtoincludeconsiderationsofproduction, forexample,theusageofrawmaterials,theamountoftimeneededfor production,ortheworkersnecessarytofinishthecomponent. Manufacturingprocessesrequiredtomaximizecertaincollectionsofoutputfactorsarefacedwiththechallengeoflearningagreatdealaboutthe manufacturingprocess.Whereexistingsystemsaredesignedfortheexact executionofsettingcriteria,theoutputconsistencyneedstobeoptimized byself-optimizingsystems [25–27].Thiscanonlybeunderstoodifthere isembeddedprofessionalknowledgeofthemechanismandboundary conditionswhichexecuteeachstepintheproductionchain.Examples includemetalmilling,clothsewing,platewelding,injectionmodelingof plasticpieces,orlaserradiationcuttingofmetalsheet.Itisnormalfor themtoprocesscontenttogiveitnewcapabilities.Witheverygeneration ofmachinesandtheircontroltechnologies,efficiencyandreliabilityof thoseproductionsystemsimprove.Suppliersrelyonmoredurablematerials,andwherepossibleaddfasteractuators.Fasterbussystemswithsensor areimplementedtoimprovecircuitcontrolandallowforquickercoordinationwiththeunit(Figs.1.6and1.7).
Figure1.6 Comparisonofaccuracyforseveralmachinelearningalgorithms.
1.6Resultsanalysis
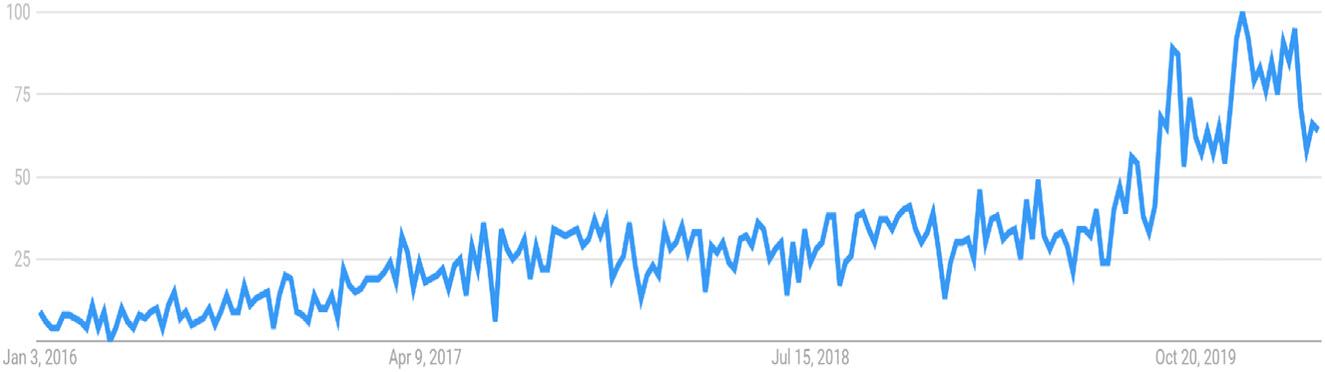
Resultsdemonstratethatthesymbiotichuman robotcollaboration solutionproposedenhancesefficiencyandimprovessafetyinassembly processesforaerospacedevelopment.Thestrengthandrepeatabilityofthe robotswassuccessfullypairedwithhumandurability,resultingin decreasedmanuallabor,decreasedspecializedequipment,andreduced time.Themethodsuggestedshowsthattheimplementationofroboticsis practical,cost-effective,andstableinthehistoricallymanualindustries. Withthestatedmodulararchitectureforhuman robotcommunication, complextaskscanbesemiautomated.Thereforethesefindingsarealso likelytobeappliedtoboosttheproductionprocessesofotherrobotreluctantsectors.Thefollowinghardwareisusedforboththedeployment andexperiments:12GBRAM,i53.6GHzCPU,4TBharddrive,and 8GBNVIDIAgraphicscard.TotraintheNNadatasetisrequired. Thereisnodatasetonuserinterfacesasfarasoursearchwasconcerned. Thusduringthecreationofthisresearchworkthedatasetwasselfgenerated.Incomparison,thedatasetcomprisesthreemajorgroups:preparation(70%),validation(15%),andtest(15%).Labelingisperformed manually,withtheassistanceofourstudycommunity.Usingagraphical imageclassificationprogram,thisroleisachievedimagebyimage.The outputisshownthroughthexmlformatcontaininglabeledsynchronizationandresults.Torepresenttheannotationin JavaScript Object Notation(JSON)formatweconvertedtheComma-SeparatedValue (CSV)fileintotheformofscriptandtraineditthroughtheYOLOv3 algorithmforalllabelmappings.Also, Fig.1.8 showstheanalysisofthe
Support Vector Machine (SVM)
Ar ficial Neural Network (ANN)
K-MeansK-Nearest Neighbor (KNN) Convolu onal Neural Network (CNN)
Figure1.7 Comparisonofprecisionscoreforseveralmachinelearningalgorithms.
RPAanalysisofduration2016 19. RPA,RoboticProcessAutomation.
Table1.2 Comparisonofdifferentalgorithmsused. AlgorithmAccuracyPrecisionscore
Supportvectormachine95.010.89
Artificialneuralnetwork89.480.83 K-means78.730.79
K-nearestneighbor69.980.82
Convolutionalneuralnetwork97.010.94
numberofusers(inmillions)ofRPAoverthespanof3years.The y-axis containsthenumberofusersandthe x-axisrepresentsthetimestamp (Table1.2).
1.7Conclusionsandfuturework
Inmanufacturingindustries,robotshavebeenusedforalongtime, operatingsecurelyalongsideandlearningfromhumans,butfortechnologicalandeconomicpurposessomeindustriesarerobot-reluctant.For modernservicesandmorecomplicatedroles,roboticshasdevelopedand hasawidervarietyofcapabilitiesthanthoseuseduptonow.Itiseasier toincorporateperipheraltechnology.Thearchitectureofthemodular frameworkwasdescribedforthecurrentcollaborativeassemblyprocess, includingpower,protection,andinterfacemodules,wherepeopleand robotswillsharethefieldofworkatthesametimewithoutphysicalseparation.Potentialusescanbeseeninarangeofplaceslikesomerobotrelatedsectors.Inthiscontext,thenextstepsinthisworkwillconcentrate onincorporatingspecialRPAtechniquesaswellaspracticalapplications forotherbusinesses,amongothers.Therobot-reluctantsectors,suchas
Figure1.8
theaerospaceindustry,willnowincorporatecooperationbetween humansandrobotstomaximizeefficiency,saveresourcesandelectricity, andboostoperators’ workingconditions.Fortheexistingandfuture manufacturingmarket,robotsareacentralfeature.
References
[1]C.DiFrancescomarino,R.Dijkman,U.Zdun(Eds.),BusinessProcessManagement Workshops.LectureNotesinBusinessInformationProcessing,2019.Availablefrom: https://doi.org/10.1007/978-3-030-37453-2 .
[2]W.M.P.VanderAalst,M.Bichler,A.Heinzl,Roboticprocessautomation,Bus.Inf. Syst.Eng.60(4)(2018)269 272.Availablefrom: https://doi.org/10.1007/s12599018-0542-4
[3] R.Syed,S.Suriadi,M.Adams,W.Bandara,S.J.J.Leemans,C.Ouyang,etal., RoboticProcessAutomation:contemporarythemesandchallenges,Comput.Ind. 115(2020)103162.
[4]S.Doltsinis,M.Krestenitis,Z.Doulgeri,Amachinelearningframeworkforrealtimeidentificationofsuccessfulsnap-fitassemblies,IEEETrans.Autom.Sci.Eng. (2019)1 11.Availablefrom: https://doi.org/10.1109/tase.2019.2932834
[5]A.Asatiani,J.M.GarcÃa,N.Helander,A.JimÃrnez-RamÃrez,A.Koschmider, J.Mendling,etal.,[LectureNotesinBusinessInformationProcessing]Business ProcessManagement:BlockchainandRoboticProcessAutomationForumVolume 393(BPM2020BlockchainandRPAForum,Seville,Spain,September13 18, 2020,Proceedings)||FromRoboticProcessAutomationtoÂIntelligentProcess Automation.,2020,10.1007/978-3-030-58779-6(Chapter15),215 228.Available from: https://doi.org/10.1007/978-3-030-58779-6_15 .
[6]C.Langmann,D.Turi,RoboticProcessAutomation(RPA)-Digitalisierungund AutomatisierungvonProzessen,2020.Availablefrom: https://doi.org/10.1007/9783-658-28299-8
[7]F.Huang,M.A.Vasarhelyi,Applyingroboticprocessautomation(RPA)inauditing: aframework,Int.J.Account.Inf.Syst.(2019)100433.Availablefrom: https://doi. org/10.1016/j.accinf.2019.100433
[8] Y.L.Qiu,G.F.Xiao,Researchoncostmanagementoptimizationoffinancialsharing centerbasedonRPA,ProcediaComput.Sci.166(2020)115 119.
[9]J.Kokina,S.Blanchette,Earlyevidenceofdigitallaborinaccounting:innovation withRoboticProcessAutomation,Int.J.Account.Inf.Syst.35(2019)100431. Availablefrom: https://doi.org/10.1016/j.accinf.2019.100431
[10]M.Cernat,A.N.Staicu,A.Stefanescu,ImprovingUITestAutomationUsing RoboticProcessAutomation.260 267,2020.Availablefrom: https://doi.org/ 10.5220/0009911202600267
[11] T.Chakraborty,I.Ghosh,Real-timeforecastsandriskassessmentofnovelcoronavirus(COVID-19)cases:Adata-drivenanalysis,Chaos,Solitons&Fractals135(2020) 109850.
[12] A.J.C.Trappey,etal.,Intelligentcompilationofpatentsummariesusingmachine learningandnaturallanguageprocessingtechniques,AdvancedEngineering Informatics43(2020)101027.
[13]C.DiCiccio,R.Gabryelczyk,L.García-Bañuelos,T.Hernaus,R.Hull,M.Indihar ˇ Stemberger,etal.(Eds.),BusinessProcessManagement:BlockchainandCentraland EasternEuropeForum.LectureNotesinBusinessInformationProcessing,2019. Availablefrom: https://doi.org/10.1007/978-3-030-30429-4 .