Visit to download the full and correct content document: https://ebookmass.com/product/introduction-to-modern-dynamics-chaos-networks-sp ace-and-time-2nd-edition-david-d-nolte/
More products digital (pdf, epub, mobi) instant download maybe you interests ...
Introduction to Modern Dynamics: Chaos, Networks, Space, and Time 2nd Edition
David D. Nolte
https://ebookmass.com/product/introduction-to-modern-dynamicschaos-networks-space-and-time-2nd-edition-david-d-nolte/
Introduction to Modern Analysis, 2nd Edition
Kantorovitz
https://ebookmass.com/product/introduction-to-modernanalysis-2nd-edition-kantorovitz/
Introduction to Chaos, Fractals and Dynamical Systems
Phil Laplante
https://ebookmass.com/product/introduction-to-chaos-fractals-anddynamical-systems-phil-laplante/
Foundations of Space Dynamics 1st Edition Ashish Tewari
https://ebookmass.com/product/foundations-of-space-dynamics-1stedition-ashish-tewari/
Introduction to Networks v6 Companion Guide 1st Edition, (Ebook PDF)
https://ebookmass.com/product/introduction-tonetworks-v6-companion-guide-1st-edition-ebook-pdf/
Introduction to Unity ML-Agents: Understand the Interplay of Neural Networks and Simulation Space Using the Unity ML-Agents Package 1st Edition Dylan
Engelbrecht
https://ebookmass.com/product/introduction-to-unity-ml-agentsunderstand-the-interplay-of-neural-networks-and-simulation-spaceusing-the-unity-ml-agents-package-1st-edition-dylanengelbrecht-2/
Introduction to Unity ML-Agents: Understand the Interplay of Neural Networks and Simulation Space Using the Unity ML-Agents Package 1st Edition Dylan Engelbrecht
https://ebookmass.com/product/introduction-to-unity-ml-agentsunderstand-the-interplay-of-neural-networks-and-simulation-spaceusing-the-unity-ml-agents-package-1st-edition-dylan-engelbrecht/
Demanding Energy: Space, Time and Change 1st Edition
Allison Hui
https://ebookmass.com/product/demanding-energy-space-time-andchange-1st-edition-allison-hui/
Interference: The History of Optical Interferometry and the Scientists Who Tamed Light David Nolte
https://ebookmass.com/product/interference-the-history-ofoptical-interferometry-and-the-scientists-who-tamed-light-davidnolte/
INTRODUCTIONTOMODERNDYNAMICS
DavidD.Nolte PurdueUniversity
GreatClarendonStreet,Oxford,OX26DP, UnitedKingdom
OxfordUniversityPressisadepartmentoftheUniversityofOxford. ItfurtherstheUniversity’sobjectiveofexcellenceinresearch,scholarship, andeducationbypublishingworldwide.Oxfordisaregisteredtrademarkof OxfordUniversityPressintheUKandincertainothercountries
©DavidD.Nolte2019
Themoralrightsoftheauthorhavebeenasserted
FirstEditionpublishedin2015
SecondEditionpublishedin2019
Impression:1
Allrightsreserved.Nopartofthispublicationmaybereproduced,storedin aretrievalsystem,ortransmitted,inanyformorbyanymeans,withoutthe priorpermissioninwritingofOxfordUniversityPress,orasexpresslypermitted bylaw,bylicenceorundertermsagreedwiththeappropriatereprographics rightsorganization.Enquiriesconcerningreproductionoutsidethescopeofthe aboveshouldbesenttotheRightsDepartment,OxfordUniversityPress,atthe addressabove
Youmustnotcirculatethisworkinanyotherform andyoumustimposethissameconditiononanyacquirer
PublishedintheUnitedStatesofAmericabyOxfordUniversityPress 198MadisonAvenue,NewYork,NY10016,UnitedStatesofAmerica
BritishLibraryCataloguinginPublicationData Dataavailable
LibraryofCongressControlNumber:2019945041
ISBN978–0–19–884462–4(hbk.) ISBN978–0–19–884463–1(pbk.)
DOI:10.1093/oso/9780198844624.001.0001
Printedandboundby CPIGroup(UK)Ltd,Croydon,CR04YY
LinkstothirdpartywebsitesareprovidedbyOxfordingoodfaithand forinformationonly.Oxforddisclaimsanyresponsibilityforthematerials containedinanythirdpartywebsitereferencedinthiswork.
Traditionaljunior-levelphysics:howtouse thisbook
Allthetraditionaltopicsofjunior-levelphysicsarehere.Fromthesimplest descriptionoftheharmonicoscillator,throughLagrangianandHamiltonian physics,torigidbodymotionandorbitaldynamics—thecoretopicsofadvanced undergraduatephysicsareretainedandareinterspersedthroughoutthistextbook.
What’ssimpleincomplexsystems?
Thetraditionaltopicsofmechanicsareintegratedintothebroaderviewofmodern dynamicsthatdrawsfromthetheoryofcomplexsystems.Therangeofsubject matterencompassedbycomplexsystemsisimmense,andacomprehensive coverageofthistopicisoutsidethescopeofthisbook.However,thereisstill asurprisinglywiderangeofcomplexbehaviorthatcanbecapturedusingthe simpleconceptthatthegeometryofadynamicspacedictatesthesetofall possibletrajectoriesinthatspace.Therefore,simpleanalysisoftheassociated flowsprovidesmanyintuitiveinsightsintotheoriginsofcomplexbehavior.The specialtopicscoveredinthistextbookare:
• Chaostheory(Chapter4)
Muchofnonlineardynamicscanbeunderstoodthrough linearization ofthe flow equations(equationsofmotion)aroundspecial fixedpoints.Visualizingthe dynamicsofmulti-parametersystemswithinmultidimensionalspacesismade simplerbyconceptssuchasthe Poincarésection, strangeattractors thathave fractal geometry,and iterativemaps
• Synchronization(Chapter6)
Thenonlinear synchronization oftwoormoreoscillatorsisastartingpointfor understandingmorecomplexsystems.Asthewholecanbegreaterthanthesum oftheparts,globalpropertiesoftenemergefromlocalinteractionsamongthe parts.Synchronizationofoscillatorsissurprisinglycommonandrobust,leading to frequency-entrainment, phase-locking,and fractionalresonance thatallowsmall perturbationstocontrollargenetworksofinteractingsystems.
Preface:TheBestPartsofPhysics
Preface:TheBestPartsofPhysics
• Networktheory(Chapter7)
Everywherewelooktoday,weseenetworks.Theonesweinteractwithdaily aresocialnetworksandrelatednetworksontheWorldWideWeb.Inthis chapter,individualnodesarejoinedintonetworksofvariousgeometries,suchas small-worldnetworks and scale-freenetworks.The diffusion ofdiseaseacrossthese networksisexplored,andthesynchronizationof Poincaréphaseoscillators can inducea Kuramototransition tocompletesynchronicity.
• Evolutionarydynamics(Chapter8)
Someoftheearliestexplorationsofnonlineardynamicscamefromstudiesof populationdynamics.Inamoderncontext,populationsaregovernedbyevolutionary pressuresandbygenetics.Topicssuchasviralmutationandspread,aswellasthe evolutionofspecieswithina fitnesslandscape,areunderstoodassimplebalances within quasispecies equations.
• Neuralnetworks(Chapter9)
Perhapsthemostcomplexofallnetworksisthebrain.Thischapterstartswiththe singleneuron,whichisa limit-cycleoscillator thatcanshowinteresting bistability and bifurcations.Whenneuronsareplacedintosimpleneuralnetworks,suchas perceptrons or feedforwardnetworks,theycandosimpletasksaftertrainingby error back-propagation.Thecomplexityofthetasksincreaseswiththecomplexityof thenetworks,and recurrentnetworks,likethe Hopfieldneuralnet,canperform associatedmemoryoperationsthatchallengeeventhehumanmind.
• Econophysics(Chapter10)
Amostbafflingcomplexsystemthatinfluencesourdailyactivities,aswellas thetrajectoryofourcareers,istheeconomyinthelargeandthesmall.The dynamicsof microeconomics determineswhatandwhywebuy,whilethedynamics of macroeconomics drivesentirenationsupanddowneconomicswings.These forcescanbe(partially)understoodintermsofnonlineardynamicsandflows ineconomicspaces. Businesscycles andthediffusionofpricesonthe stockmarket arenolessunderstandablethanevolutionarydynamics(Chapter8)ornetwork dynamics(Chapter7),andindeeddrawcloselyfromthosetopics.
• Geodesicmotion(Chapter11)
Thischapteristhebridgebetweentheprecedingchaptersoncomplexsystems andthesucceedingchaptersonrelativitytheory(bothspecialandgeneral).This iswherethegeometryofspaceisfirstfullydefinedintermsofa metrictensor,and wheretrajectoriesthrougha dynamicalspace arediscoveredtobepathsof force-
freemotion.The geodesicequation (ageodesicflow)supersedesNewton’sSecond Lawasthefundamentalequationofmotionthatcanbeusedtodefinethepathof massesthroughpotentiallandscapesandthepathoflightthroughspace-time.
• Specialrelativity(Chapter12)
Inadditiontotraditionaltopicsof Lorentztransformations and mass-energy equivalence,thischapterpresentsthebroaderviewoftrajectoriesthroughMinkowski space-time whosegeometricpropertiesaredefinedbythe Minkowskimetric. Relativisticforcesandnoninertial(accelerating)framesconnecttothenext chapterthatgeneralizesallrelativisticbehavior.
• Generalrelativity(Chapter13)
Thephysicsof gravitation,morethananyothertopic,benefitsfromtheoverarchingthemedevelopedthroughoutthisbook—thatthegeometryofaspace definesthepropertiesofalltrajectorieswithinthatspace.Indeed,inthisgeometric viewofphysics,Newton’sforceofgravitydisappearsandisreplacedbyforcefreegeodesicsthrough warped space-time.Mercury’sorbitaroundtheSun, andtrajectoriesoflightpast blackholes,areelementsofgeodesicflowswhose propertiesareeasilyunderstoodusingthetoolsdevelopedinChapter4and expandeduponthroughoutthistextbook.
Preface:TheBestPartsofPhysics
Acknowledgments
Igratefullyacknowledgethemanyhelpfuldiscussionswithmycolleagues EphraimFischbach,AndrewHirsch,SherwinLove,andHisaoNakanishiduring thepreparationofthisbook.Specialthankstomyfamily,LauraandNicholas,for puttingupwithmy“hobby”forsomanyyears,andalsofortheirencouragement andmoralsupport.IalsothanktheeditorsatOxfordUniversityPressforhelpin preparingthemanuscriptandespeciallySonkeAdlungforhelpingmerealizemy vision.
1
1.1Statespaceanddynamical flows4
1.2Coordinaterepresentationof dynamicalsystems10
1.3Coordinatetransformations15
1.4Uniformlyrotatingframes25
1.5Rigid-bodymotion32
1.6Summary48
1.7Bibliography48
1.8Homeworkproblems49
Foucault’sPenduluminthePantheoninParis
1 SeeA.E.Jackson, PerspectivesofNonlinearDynamics (CambridgeUniversity Press,1989).
uniquelydeterminedbythecurrentstate.Thisiscalleddeterministicdynamics, whichincludesdeterministicnonlineardynamicsforwhichchaotictrajectories mayhaveanapparentrandomnesstotheircharacter.
Thischapterlaysthefoundationforthedescriptionofdynamicalsystemsthat movecontinuouslyfromstatetostate.Familiesoftrajectories,calleddynamical flows,arethefundamentalelementsofinterest;theyarethefieldlinesofdynamics. Thesefieldlinesaretodeterministicdynamicswhatelectricandmagneticfield linesaretoelectromagnetism.Onekeydifferenceisthatthereisonlyonesetof Maxwell’sequations,whileeverynonlineardynamicalsystemhasitsownsetof equations,providinganearlylimitlessnumberofpossibilitiesforustostudy.
Thischapterbeginsbyintroducinggeneralideasoftrajectoriesasthesetofall possiblecurvesdefinedbydynamicalflowsinstatespace.Todefinetrajectories, wewillestablishnotationtohelpusdescribehigh-dimensional,abstract,and possiblycurvedspaces.Thisisaccomplishedthroughtheuseofmatrix(actually tensor)indicesthatlookstrangeatfirsttoastudentfamiliaronlywithvectors, butwhichareconvenientdevicesforkeepingtrackofmultiplecoordinates.The nextstepconstructscoordinatetransformationsfromonecoordinatesystem toanother.Forinstance,acentralquestioninmoderndynamicsishowtwo observers,oneineachsystem,describethecommonphenomenathatthey observe.The physics mustbeinvarianttothechoiceofcoordinateframe,butthe descriptionscandifferwidely.
1.1Statespaceanddynamicalflows
Configurationspaceisdefinedbythespatialcoordinatesneededtodescribea dynamicalsystem.Thepaththesystemtakesthroughconfigurationspaceisits trajectory.Eachpointonthetrajectorycapturesthesuccessiveconfigurationsof thesystemasitevolvesintime.However,knowingthecurrentconfigurationof thesystemdoesnotguaranteethatthenextconfigurationcanbedefined.For instance,thetrajectorycanloopbackandcrossitself.Thevelocityvectorthat pointedonedirectionattheearliertimecanpointinadifferentdirectionatalater time.Therefore,avelocityvectormustbeattachedtoeachconfigurationtodefine howitwillevolvenext.
1.1.1Statespace
Byaddingvelocities,associatedwitheachofthecoordinates,totheconfiguration space,anewexpandedspace,called statespace,iscreated.Foragiveninitial condition,thereisonlyasinglesystemtrajectorythroughthismultidimensional space,andeachpointonthetrajectoryuniquelydefinesthenextstateofthe system.1 Thistrajectoryinstatespacecancrossitselfonlyatpointswhereallthe velocitiesvanish,otherwisethefuturestateofthesystemwouldnotbeunique.
Example1.1 Statespaceofthedampedone-dimensionalharmonicoscillator
Thedampedharmonicoscillatorinonecoordinatehasthesinglesecond-orderordinarydifferentialequation2
where m isthemassoftheparticle, γ isthedragcoefficient,and k isthespringconstant.Anysetofsecond-order time-dependentordinarydifferentialequations(e.g.,Newton’ssecondlaw)canbewrittenasalargersetoffirst-order equations.Forinstance,thesinglesecond-orderequation(1.1)canberewrittenastwofirst-orderequations
Itisconventionaltowritethesewithasingletimederivativeontheleftas
inthetwovariables (x, v) with
and
. Statespace forthissystemofequationsconsistsoftwo coordinateaxesinthetwovariables (x, v),andtheright-handsideoftheequationsareexpressedusingonlythesame twovariables.
Tosolvethisequation,assumeasolutionintheformofacomplexexponentialevolvingintimewithanangular frequency ω as(seeAppendixA.1)
InsertthisexpressionintoEq.(1.1)toyield
withthecharacteristicequation
wherethedampingparameteris β = γ/2m,andtheresonantangularfrequencyisgivenby ω 2 0 = k/m.Thesolution ofthequadraticequation(1.6)is
Usingthisexpressionfortheangularfrequencyintheassumedsolution(1.4)gives
Considertheinitialvalues x(0) = A and ˙ x(0) = 0;thenthetwoinitialconditionsimposethevalues
2 The“dot”notationstandsforatimederivative: ˙ x = dx/dt and ¨ x = d 2 x/dt 2 .Itisa modernremnantofNewton’sfluxionnotation.
Example1.1 continued
Thefinalsolutionis
whichisplottedinFig.1.1(a)forthecasewheretheinitialdisplacementisamaximumandtheinitialspeediszero. Theoscillator“ringsdown”withtheexponentialdecayconstant β Theangularfrequencyofthering-downisnot equalto ω0 ,butisreducedtothevalue ω 2 0 β 2 .Hence,thedampingdecreasesthefrequencyoftheoscillatorfrom itsnaturalresonantfrequency.Asystemtrajectoryinstatespacestartsataninitialcondition (x0 , v0 ),anduniquely tracesthetimeevolutionofthesystemasacurveinthestatespace.InFig.1.1(b),onlyonetrajectory(streamline)is drawn,butstreamlinesfillthestatespace,althoughtheynevercross,exceptatsingularpointswhereallvelocitiesvanish. Streamlinesarethefieldlinesofthevectorfield.Muchofthestudyofmoderndynamicsisthestudyofthegeometric propertiesofthevectorfield(tangentstothestreamlines)andfieldlinesassociatedwithadefinedsetofflowequations.

Figure1.1 Trajectoriesofthedampedharmonicoscillator.(a)Configurationpositionversustime.(b)Statespace,everypoint ofwhichhasatangentvectorassociatedwithit.Streamlinesarethefieldlinesofthevectorfieldandaredense.Onlyasingle streamlineisshown.
1.1.2Dynamicalflows
Thisbookworkswithageneralformofsetsofdynamicalequationscalleda dynamicalflow.Theflowforasystemof N variablesisdefinedas
or,moresuccinctly,
whichisasystemof N simultaneousequations,wherethevectorfunction Fa is afunctionofthetime-varyingcoordinatesofthepositionvector.If Fa isnotan explicitfunctionoftime,thenthesystemis autonomous,withan N -dimensional statespace.Ontheotherhand,if Fa isanexplicitfunctionoftime,thenthesystem is non-autonomous,withan(N + 1)-dimensionalstatespace(spaceplustime)The solutionofthesystemofequations(1.12)isasetoftrajectories qa (t ) throughthe statespace.
Inthisbook,thephrase configurationspace isreservedforthedynamicsof systemsofmassiveparticles(withsecond-ordertimederivativesasinExamples 1.1and1.2).Thedimensionofthestatespaceforparticlesystemsisevendimensionalbecausethereisavelocityforeachcoordinate.However,forgeneral dynamicalflows,thedimensionofthestatespacecanbeevenorodd.For dynamicalflows,statespaceandconfigurationspacearethesamething,andthe phrase statespace willbeused.
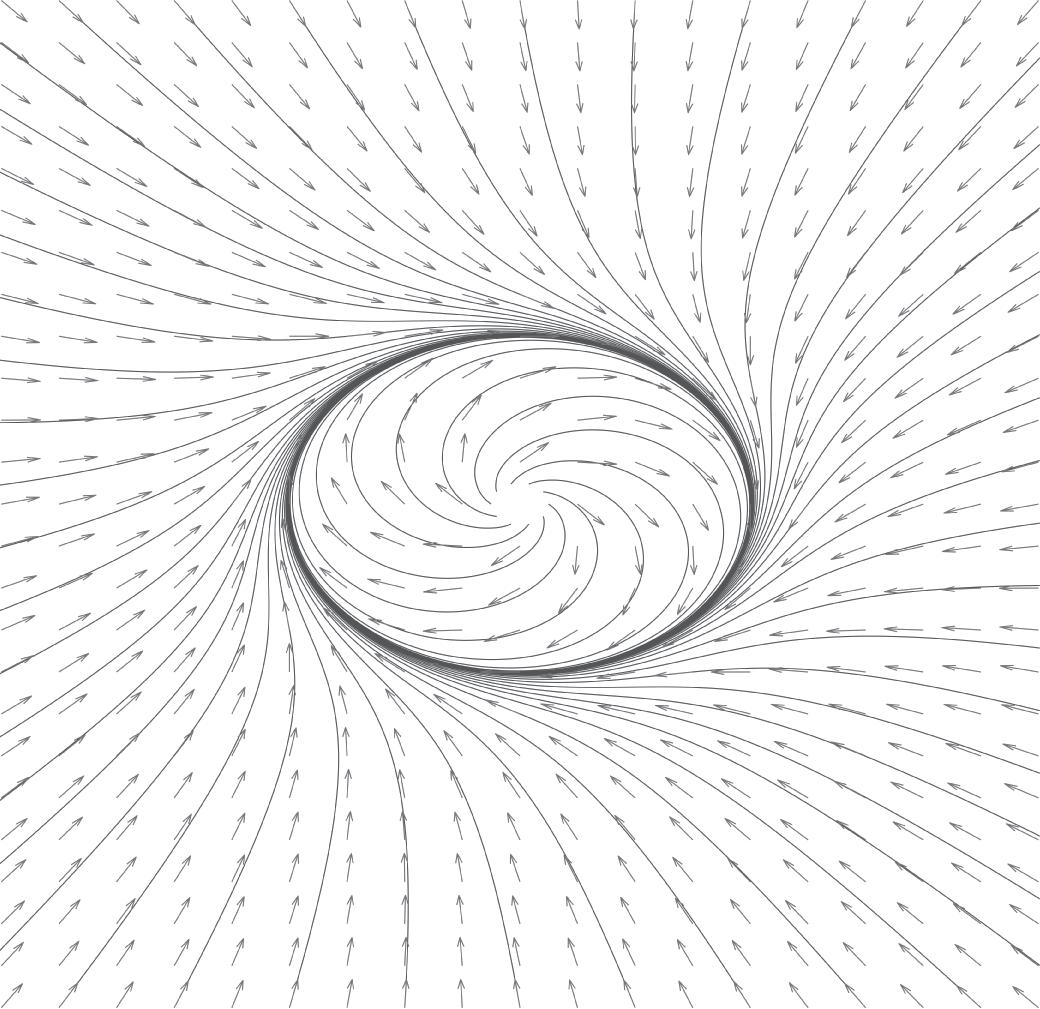
Example1.2 Anautonomousoscillator
Systemsthatexhibitself-sustainedoscillation,knownasautonomousoscillators,arecentraltomanyofthetopics ofnonlineardynamics.Forinstance,anordinarypendulumclock,drivenbymechanicalweights,isanautonomous oscillatorwithanaturaloscillationfrequencythatissustainedbygravity.Onepossibledescriptionofanautonomous oscillatorisgivenbythedynamicalflowequations
Example1.2 continued
where ω isanangularfrequency.The(x, y)state-spacetrajectoriesofthissystemarespiralsthatrelaxtotheunitcircleas theyapproachadynamicequilibrium,showninFig.1.2.Withoutthesecondtermsontheright-handside,thisissimply anundampedharmonicoscillator.Examplesandproblemsinvolvingautonomousoscillatorswillrecurthroughoutthis bookinChapters4(Chaos),6(Synchronization),7(Networks),8(EvolutionaryDynamics),9(Neurodynamics)and 10(EconomicDynamics).
Figure1.2 Flowlinesofanautonomousoscillatorwithalimitcycle.Alltrajectoriesconvergeonthelimitcycle.
Example1.3 Undampedpoint-masspendulum
Theundampedpoint-masspendulumiscomposedofapointmass m onamasslessrigidrodoflength L.Ithasa two-dimensionalstate-spacedynamicsinthespace(
, ω )describedby
Thestate-spacetrajectoriescanbeobtainedbyintegratingtheseequationsusinganonlinearODEsolver.Alternatively, thestate-spacetrajectoriescanbeobtainedanalyticallyifthereareconstantsofthemotion.Forinstance,becausethe pendulumisundampedandconservative,thetotalenergyofthesystemisaconstantforagiveninitialcondition,
referencedtothebottomofthemotioninconfigurationspace.Ifthemaximumangleofthependulumforagiven trajectoryis θ0 ,then
Example1.3 continued and
whichissolvedfortheinstantaneousangularvelocity ω as
Theseareoscillatorymotionsfor θ0 <π .Forlargerenergies,themotionisrotational(alsoknownaslibration).The solutionsinthiscaseare
wherecos θ 0 isnotaphysicalangle,butisaneffectiveparameterdescribingthetotalenergyas
The(θ , ω )state-spacetrajectoriesoftheundampedpoint-masspendulumareshowninFig.1.3.Whenthestatespace pertainstoaconservativesystem,itisalsocalled phasespace.ConservativesystemsareHamiltoniansystemsandare describedinChapter3.
Figure1.3 Statespaceoftheundampedpoint-masspendulum.Theconfigurationspaceisone-dimensionalalongtheangle θ .Closedorbits(oscillation)areseparatedfromopenorbits(rotation)byacurveknownasaseparatrix.
Example1.4 Athree-variableharmonicoscillator
Asanexampleofanodd-dimensionalstatespace,considerthethree-dimensionalflow
Thismathematicalmodelisequivalenttoathree-variablelinearoscillatorwithnodissipation.Tosolvethisflow,assume asolutionintheformofacomplexexponentialintimeevolvingwithanangularfrequency ω as x(t ) = Xei ω t .Insert thisexpressionintoEq.(1.21)toyield
Solvetheseculardeterminantfortheangularfrequency ω :
Thesolutions,foranyinitialcondition,arethreesinusoidswithidenticalamplitudesandfrequencies,butwithrelative phasesthatdifferby ±2π/3.Adynamicalsystemlikethisis not equivalenttomodelingaparticlewithinertia.Itisa dynamicalflowwithastate-spacedimensionequaltothreethatmightmodelthebehaviorofaneconomicsystem,or anecologicalbalanceamongthreespecies,oracoupledsetofneurons.Inthestudyofmoderndynamicalsystems, theemphasismovesawayfromparticlesactedonbyforcesandbecomesmoreabstract,butalsomoregeneraland versatile.
Thisexamplehaswhatiscalled“neutralstability.”Thismeansthatevenaslightperturbationofthissystemmay causetheoscillationstoeitherdecaytozeroortogrowwithoutbound.InChapter4,astabilityanalysiswillidentify thissystemasa“center.”Thisoscillatorysystemisnotarobustsystem,becauseasmallchangeinparametercan causeamajorchangeinitsqualitativebehavior.However,therearetypesofself-sustainedoscillationsthat are robust, maintainingsteadyoscillatorybehaviorevenasparameters,andevendissipation,change.Theseareautonomous oscillatorsandareinvariablynonlinearoscillators.
1.2Coordinaterepresentationofdynamical systems
Although physics mustbeindependentofanycoordinateframe,thedescription ofwhatwesee does dependonwhichframeweareviewingitfrom.Therefore,it oftenwillbeconvenienttoviewthesamephysicsfromdifferentperspectives.For
thisreason,weneedtofindtransformationlawsthatconvertthedescriptionfrom oneframetoanother.
1.2.1Coordinatenotationandconfigurationspace
Thepositionofafreeparticleinthree-dimensional(3D)spaceisspecifiedby threevaluesthatconventionallycanbeassignedtheCartesiancoordinatevalues x(t ), y(t ),and z(t ).Thesecoordinatesdefinetheinstantaneousconfiguration ofthesystem.Ifasecondparticleisadded,thentherearethreeadditional coordinates,andthe configurationspace ofthesystemisnowsix-dimensional. Ratherthanspecifyingthreenewcoordinatenames,suchas u(t ), v(t ),or w(t ), itismoreconvenienttouseanotationthatisextendedeasilytoanynumberof dimensions.Indexnotionaccomplishesthisbyhavingtheindexspanacrossall thecoordinatevalues.
Vectorcomponentsthroughoutthistextwillbedenotedwithasuperscript.For instance,thepositionvectorofafreeparticlein3DEuclideanspaceisa3-tuple ofvalues
Vectorsarerepresentedbycolumnmatrices(whichisthemeaningofthesuperscriptshere3 ).Itisimportanttorememberthatthesesuperscriptsarenot “powers.”Acoordinatecomponentraisedtoan nthpowerwillbeexpressed as (xa )n .For N freeparticles,asingle3N -dimensionalpositionvectordefines theinstantaneousconfigurationofthesystem.Toabbreviatethecoordinate description,onecanusethenotation
x = xa a = 1, ,3N
(1.26)
wherethecurlybracketsdenotethefullsetofcoordinates.Anevenshorter,and morecommon,notationforavectorissimply
xa (1.27)
wherethefullset a = 1, ,3N isimplied.Caseswhereonlyasinglecoordinate isintendedwillbeclearfromthecontext.Thepositioncoordinatesdevelopin timeas
xa (t )
(1.28)
whichdescribesatrajectoryofthesysteminits3N -dimensionalconfiguration space.
3 Thesuperscriptisapartofthenotationfortensorsandmanifoldsinwhich vectorsdifferfromanothertypeofcomponentcalledacovectorthatisdenoted byasubscript.InCartesiancoordinates, asuperscriptdenotesacolumnvector andasubscriptdenotesarowvector(see AppendixA.3).
1.2.2Trajectoriesin3Dconfigurationspace
Atrajectoryisasetofpositioncoordinatevaluesthatvarycontinuouslywith asingleparameteranddefineasmoothcurveintheconfigurationspace.For instance,
where t isthetimeand s isthepathlengthalongthetrajectory.Oncethetrajectory ofapointhasbeendefinedwithinitsconfigurationspace,itishelpfultodefine propertiesofthetrajectory,likethetangenttothecurveandthenormal.The velocityvectoristangenttothepath.Forasingleparticlein3D,thiswouldbe
wherethe ds/dt termissimplythespeedoftheparticle.Inthesimplifiedindex notation,thisis
where T a isaunittangentvectorinthedirectionofthevelocity:
Eachpointonthetrajectoryhasanassociatedtangentvector.Inadditiontothe tangentvector,anotherimportantvectorpropertyofatrajectoryisthenormalto thetrajectory,definedby
where N a istheunitvectornormaltothecurve,andthecurvatureofthe trajectoryis
where R istheradiusofcurvatureatthespecifiedpointonthetrajectory. Theparameterizationofatrajectoryintermsofitspathlength s isoften amore“natural”wayofdescribingthetrajectory,especiallyundercoordinate transformations.Forinstance,inspecialrelativity,timeisnolongeranabsolute parameter,becauseitistransformedinamannersimilartoposition.Thenitis
possibletodefineapathlengthinterval ds2 inspace–timethatremainsinvariant underLorentztransformation(seeChapter12)andhencecanbeusedtospecify thepaththroughspace–time.4
Example1.5 Parabolictrajectoryinagravitationalfield
Thisisafamiliarproblemthatgoesbacktofreshmanphysics.However,it isseenhereinaslightlydifferentlight.Consideraparticleinaconstant gravitationalfieldthrownwithinitialvelocity v0 inthe x direction.The mathematicaldescriptionofthismotionis
withthesolution,forinitialconditions
givingthespatialtrajectory
Thespeedoftheparticleis
withthearclengthelement
andthetangentvectorcomponents
continued 4 Moregenerally,theinvariantsquared pathlengthinterval ds2 isanessentialpart ofthemetricdescriptionofthegeometry ofspace–timeandotherdynamicalspaces, andisakeyaspectofgeodesicmotionfor bodiesmovingthroughthosespaces(see Chapter11).
Example1.5 continued
Thetrajectoryanditstangentvectoraredescribedasfunctionsofposition— ageometriccurveratherthananexplicitfunctionoftime.Whiletheresults forthisfamiliarproblemmaylookunfamiliar,itissimilartothedescription oftrajectoriesinspecialrelativity,ortogeodesictrajectoriesneargravitating bodiesinspace–timethatwillbetreatedinlaterchapters.
1.2.3Generalizedcoordinates
TheconfigurationcoordinatesconsideredsofarhavebeenCartesiancoordinates (x, y, z).However,thereareabstractcoordinates,called generalizedcoordinates, thatmaybemoreeasilyemployedtosolvedynamicalproblems.Generalized coordinatesariseindifferentways.Theymaybedictatedbythesymmetryof theproblem,likepolarcoordinatesforcircularmotion.Theymaybedefined byconstraintsonthephysicalsystem,likeaparticleconstrainedtomoveona surface.Ortheymaybedefinedbycoupling(functionaldependence)between thecoordinatesofamulticomponentsystem,leadingtogeneralizedcoordinates knownasnormalmodes.Generalizedcoordinatesareoftendenotedby q’s. Theymaybedescribedintermsofothercoordinates,forinstanceCartesian coordinates,as
wherethetransformationsassociatedwitheachindexmayhavedifferentfunctionalformsanddonotneedtobelinearfunctionsoftheirarguments.The generalizedcoordinatesdonotneedtohavethedimensionoflength,andeachcan havedifferentunits.However,itisrequiredthatthetransformationbeinvertible (one-to-one).
Generalizedcoordinatescanbeusedtosimplifythedescriptionofthemotions ofcomplexsystemscomposedoflargenumbersofparticles.Ifthereare N particles,eachwiththreecoordinates,thenthetotaldimensionoftheconfiguration spaceis3N andthereisadensesetofsystemtrajectoriesthatthreadtheirway throughthisconfigurationspace.However,oftenthereareconstraintsonthe physicalsystem,suchastherequirementthatparticlesbeconstrainedtoreside onaphysicalsurfacesuchasthesurfaceofasphere.Inthiscase,thereare equationsthatconnecttwoormoreofthecoordinates.Ifthereare K equationsofconstraints,thenthenumberofindependentgeneralizedcoordinatesis 3N K andthemotionoccursona(3N – K )-dimensionalhypersurfacewithin theconfigurationspace.Thishypersurfaceiscalleda manifold.Inprinciple,it ispossibletofindthe3N – K generalizedcoordinatesthatspanthismanifold,
andthemanifoldbecomesthenewconfigurationspacespannedbythe3N – K generalizedcoordinates.Furthermore,someofthegeneralizedcoordinatesmay notparticipateinthedynamics.Thesearecalled ignorablecoordinates (alsoknown as cycliccoordinates),andtheyariseowingtosymmetriesintheconfigurationspace plusconstraints,andareassociatedwithconservedquantities.Thedimensionality ofthedynamicalmanifoldonwhichthesystemtrajectoryresidesisfurther reducedbyeachoftheseconservedquantities.Ultimately,afteralltheconserved quantitiesandalltheconstraintshavebeenaccountedfor,themanifoldthat containsthesystemtrajectorymayhaveadimensionmuchsmallerthanthe dimensionoftheoriginalCartesianconfigurationspace.
Example1.6 Beadslidingonafrictionlesshelicalwire
Considerabeadslidingwithoutfrictiononahelicalwirewithnogravity.Thetrajectoryisdefinedin3DCartesian coordinatesby
parameterizedbytime t.Therearetwoconstraints
where a isthepitchofthehelixand θ = ω t .Theseconstraintsreducethe3Ddynamicsto1Dmotion(3–2 = 1),and the1Dtrajectoryhasasinglegeneralizedcoordinate
whichisalsoequaltothepathlength s.Thespeedoftheparticleisaconstantandis
1.3Coordinatetransformations
Forageneralcoordinatetransformation,theoriginalCartesiancoordinates x, y, and z arerelatedtocoordinates q1 , q2 ,and q3 bythefunctions
x = x q1 , q2 , q3 y = y q1 , q2 , q3 z = z q1 , q2 , q3
Theseequationscanbeinvertedtoyield
whichmaybegeneralizedcoordinatesthatarechosentosimplifytheequations ofmotionofadynamicalsystem.
1.3.1Jacobianmatrix
TheJacobianmatrixofthetransformationisdefinedfromthecoordinatetransformations(andinversetransformations)as
Thedeterminant |J | iscalledtheJacobian.
TheJacobianmatrixrequirestwoindicestodefineitsindividualelements,just asavectorrequiredoneindex.BecausetheJacobianmatrixisgeneratedusing derivatives,anindexnotationthatdistinguishesbetweenthedifferentialvectorin thenumeratorrelativetothedifferentialvectorinthedenominatoris
row index column index
wherethesuperscriptandsubscriptrelateto xa and qb ,respectively.Thesuperscriptiscalledacontravariantindex,andthesubscriptiscalledacovariantindex. Onewaytorememberthisnomenclatureisthat“co”goes“below.”Thecovariant indexreferstothecolumnsofthematrix,andthecontravariantindexreferstothe rows.Columnvectorshavecontravariantindicesbecausetheyhavemultiplerows, whilerowvectorshavecovariantindicesbecausetheyhavemultiplecolumns.Row vectorsarealsoknownascovariantvectors,orcovectors.
WhentransformingbetweenCartesianandgeneralizedcoordinates,an infinitesimaltransformationisexpressedas