Lesfari
Ahmed
First published 2022 in Great Britain and the United States by ISTE Ltd and John Wiley & Sons, Inc.
Apart from any fair dealing for the purposes of research or private study, or criticism or review, as permitted under the Copyright, Designs and Patents Act 1988, this publication may only be reproduced, stored or transmitted, in any form or by any means, with the prior permission in writing of the publishers, or in the case of reprographic reproduction in accordance with the terms and licenses issued by the CLA. Enquiries concerning reproduction outside these terms should be sent to the publishers at the undermentioned address:
ISTE Ltd
John Wiley & Sons, Inc.
27-37 St George’s Road 111 River Street London SW19 4EU Hoboken, NJ 07030
UK USA
www.iste.co.uk
www.wiley.com
© ISTE Ltd 2022
The rights of Ahmed Lesfari to be identified as the author of this work have been asserted by him in accordance with the Copyright, Designs and Patents Act 1988.
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s), contributor(s) or editor(s) and do not necessarily reflect the views of ISTE Group.
Library of Congress Control Number: 2022932445
British Library Cataloguing-in-Publication Data
A CIP record for this book is available from the British Library
ISBN 978-1-78630-827-6
1.1.Introduction.................................1
1.2.Symplecticvectorspaces..........................2
1.3.Symplecticmanifolds............................3
1.4.Vectorsfieldsandflows...........................7
1.5.TheDarbouxtheorem............................22
1.6.PoissonbracketsandHamiltoniansystems................25
1.7.Examples...................................31
1.8.Coadjointorbitsandtheirsymplecticstructures.............35
1.9.Applicationtothegroup SO (n) ......................37
1.9.1.Applicationtothegroup SO (3) ....................39
1.9.2.Applicationtothegroup SO (4) ....................41
2.1.Euler–Lagrangeequation..........................49
2.2.Legendretransformation..........................52
2.3.Hamilton’scanonicalequations......................53
2.4.Canonicaltransformations.........................55
2.5.Hamilton–Jacobiequation.........................57
2.6.Applications.................................60
2.6.1.Harmonicoscillator...........................60
2.6.2.TheKeplerproblem...........................61
2.6.3.Simplependulum............................62
2.7.Exercises...................................64
Chapter3.IntegrableSystems .........................67
3.1.HamiltoniansystemsandArnold–Liouvilletheorem..........67
3.2.Rotationofarigidbodyaboutafixedpoint................75
3.2.1.TheEulerproblemofarigidbody...................78
3.2.2.TheLagrangetop............................82
3.2.3.TheKowalewskispinningtop.....................83
3.2.4.Specialcases...............................90
3.3.Motionofasolidthroughidealfluid....................91
3.3.1.Clebsch’scase..............................91
3.3.2.Lyapunov–Steklov’scase........................93
3.4.Yang–Millsfieldwithgaugegroup SU (2) ................93
3.5.Appendix(geodesicflowandEuler–Arnoldequations).........95
3.6.Exercises...................................100
Chapter4.SpectralMethodsforSolvingIntegrableSystems ....103
4.1.Laxequationsandspectralcurves.....................103
4.2.IntegrablesystemsandKac–MoodyLiealgebras............104
4.3.Geodesicflowon SO (n) ..........................107
4.4.TheEulerproblemofarigidbody.....................108
4.5.TheManakovgeodesicflowonthegroup SO (4) ............109
4.6.JacobigeodesicflowonanellipsoidandNeumannproblem......114
4.7.TheLagrangetop..............................115
4.8.Quarticpotential,Garniersystem.....................115
4.9.ThecouplednonlinearSchrödingerequations..............118
4.10.TheYang–Millsequations.........................119
4.11.TheKowalewskitop............................119
4.12.TheGoryachev–Chaplygintop......................121
4.13.Periodicinfinitebandmatrix.......................122
4.14.Exercises..................................122
Chapter5.TheSpectrumofJacobiMatricesandAlgebraic Curves ........................................129
5.1.Jacobimatricesandalgebraiccurves...................129
5.2.Differenceoperators.............................135
5.3.Continuedfraction,orthogonalpolynomialsandAbelianintegrals...137
5.4.Exercises...................................140
Chapter6.GriffithsLinearizationFlowsonJacobians .........143
6.1.Spectralcurves................................143
6.2.Cohomologicaldeformationtheory....................144
6.3.Mittag–Lefflerproblem...........................148
6.4.Linearizingflows..............................149
6.5.TheTodalattice...............................150
6.6.TheLagrangetop..............................153
6.7.Nahm’sequations..............................154
6.8.The n-dimensionalrigidbody.......................155
6.9.Exercises...................................156
Chapter7.AlgebraicallyIntegrableSystems ...............159
7.1.Meromorphicsolutions...........................159
7.2.Algebraiccompleteintegrability......................164
7.3.TheLiouville–Arnold–Adler–vanMoerbeketheorem..........171
7.4.TheEulerproblemofarigidbody.....................173
7.5.TheKowalewskitop.............................175
7.6.TheHénon–Heilessystem.........................191
7.7.TheManakovgeodesicflowonthegroup SO (4) ............200
7.8.Geodesicflowon SO (4) withaquarticinvariant.............206
7.9.Thegeodesicflowon SO (n) foraleftinvariantmetric.........210
7.10.Theperiodicfive-particleKac–vanMoerbekelattice..........212
7.11.GeneralizedperiodicTodasystems....................213
7.12.TheGross–Neveusystem.........................214
7.13.TheKolossofpotential...........................215
7.14.Exercises..................................215
Chapter8.GeneralizedAlgebraicCompletelyIntegrable Systems .......................................221
8.1.Generalities..................................221
8.2.TheRDGpotentialandafive-dimensionalsystem............225
8.3.TheHénon–Heilesproblemandafive-dimensionalsystem.......229
8.4.TheGoryachev–Chaplygintopandaseven-dimensionalsystem....231
8.5.TheLagrangetop..............................236
8.6.Exercises...................................237
Chapter9.TheKorteweg–deVriesEquation
9.1.Historicalaspectsandintroduction....................241
9.2.StationarySchrödingerandintegralGelfand–Levitanequations....243
9.3.Theinversescatteringmethod.......................255
9.4.Exercises...................................269
Chapter10.KP–KdVHierarchyandPseudo-differential Operators ......................................275
10.1.Pseudo-differentialoperatorsandsymplecticstructures........275
10.2.KdVequation,HeisenbergandVirasoroalgebras............279
Preface
Thisbookisintendedforawidereadershipofmathematiciansandphysicists: studentspursuinggraduate,mastersandhigherdegreesinmathematicsand mathematicalphysics.Itisdevotedtosomegeometricandtopologicalaspectsofthe theoryofintegrablesystemsandthepresentationisclearandwell-organized,with manyexamplesandproblemsprovidedthroughoutthetext.IntegrableHamiltonian systemsarenonlinearordinarydifferentialequationsthataredescribedbya Hamiltonianfunctionandpossesssufficientlymanyindependentconstantsofmotion ininvolution.TheproblemoffindingandintegratingHamiltoniansystemshas attractedaconsiderableamountofattentioninrecentdecades.Besidesthefactthat manyintegrablesystemshavebeenthesubjectofpowerfulandbeautifultheoriesof mathematics,anothermotivationfortheirstudyistheconceptsofintegrabilitythat areappliedtoanincreasingnumberofphysicalsystems,biologicalphenomena, populationdynamicsandchemicalrateequations,tomentionbutafewapplications. However,itstillseemshopelesstodescribe,oreventorecognizewithanyfacility, theHamiltoniansystemswhichareintegrable,eventhoughtheyareexceptional.
Chapter1isdevotedtothestudyofsymplecticmanifoldsandtheirconnection withHamiltoniandynamicalsystems.Wereviewsomeinterestingpropertiesof one-parametergroupsofdiffeomorphismsorofflow,Liederivative,interiorproduct orCartan’sformula,aswellasthestudyofacentraltheoremofsymplecticgeometry, namely,Darboux’stheorem.Wealsoshowhowtodetermineexplicitlysymplectic structuresonadjointandcoadjointorbitsofaLiegroup,withparticularattention giventothegroup SO (n).
Chapter2dealswiththestudyofsomenotionsconcerningtheHamilton–Jacobi theoryinthecalculusofvariations.WewillestablishtheEuler–Lagrangedifferential equations,Hamilton’scanonicalequationsandtheHamilton–Jacobipartial differentialequationandexplainhowitiswidelyusedinpracticetosolvesome
problems.Asanapplication,wewillstudythegeodesics,theharmonicoscillator,the Keplerproblemandthesimplependulum.
InChapter3,westudytheArnold–Liouvilletheorem:theregularcompactlevel manifoldsdefinedbytheintersectionoftheconstantsofmotionarediffeomorphicto arealtorusonwhichthemotionisquasi-periodicasaconsequenceofthefollowing differentialgeometricfact;acompactandconnected n-dimensionalmanifoldon whichthereexist n vectorfieldsthatcommuteandareindependentateverypointis diffeomorphictoan n-dimensionalrealtorus,andthereisatransformationto so-calledaction-anglevariables,mappingtheflowintoastraightlinemotiononthat torus.WegiveaproofasdirectaspossibleoftheArnold–Liouvilletheoremandwe makeacarefulstudyofitsconnectionwiththeconceptofcompletelyintegrable systems.Manyproblemsarestudiedindetail:therotationofarigidbodyabouta fixedpoint,themotionofasolidinanidealfluidandtheYang–Millsfieldwith gaugegroup SU (2).
InChapter4,wegiveadetailedstudyoftheintegrablesystemsthatcanbe writtenasLaxequationswithaspectralparameter.Suchequationshaveno apriori Hamiltoniancontent.However,throughtheAdler–Kostant–Symes(AKS) construction,wecanproduceHamiltoniansystemsoncoadjointorbitsinthedual spacetoaLiealgebrawhoseequationsofmotiontaketheLaxform.Weoutlinean algebraic-geometricinterpretationoftheflowsofthesesystems,whichareshownto describelinearmotiononacomplextorus.Therelationshipbetweenspectraltheory andcompletelyintegrablesystemsisafundamentalaspectofthemoderntheoryof integrablesystems.Thischaptersurveysanumberofclassicalandrecentresultsand ourpurposehereistosketchamotivatedoverviewofthisinterestingsubject.We presentaLiealgebratheoreticalschemaleadingtointegrablesystemsbasedonthe Kostant–Kirillovcoadjointaction.ManyproblemsonKostant–Kirillovcoadjoint orbitsinsubalgebrasofinfinitedimensionalLiealgebras(Kac–MoodyLiealgebras) yieldlargeclassesofextendedLaxpairs.Ageneralstatementleadingtosuch situationsisgivenbytheAKStheorem,andthevanMoerbeke–Mumford linearizationmethodprovidesanalgebraicmapfromthecomplexinvariant manifoldsofthesesystemstotheJacobivariety(orsomesubabelianvarietyofit)of thespectralcurve.Thecomplexflowsgeneratedbytheconstantsofthemotionare straightlinemotionsonthesevarieties.Thischapterdescribesaversionofthe generalscheme,andshowsindetailhowseveralimportantclassesofexamplesfit intothegeneralframework.Severalexamplesofintegrablesystemsofrelevancein mathematicalphysicsarecarefullydiscussed:geodesicflowon SO (n),theEuler problemofarigidbody,Manakovgeodesicflowonthegroup SO (4),Jacobi geodesicflowonanellipsoid,theNeumannproblem,theLagrangetop,aquartic potentialorGarniersystem,couplednonlinearSchrödingerequations,Yang–Mills equations,theKowalewskispinningtop,theGoryachev–Chaplygintopandthe periodicinfinitebandmatrix.
TheaimofChapter5istodescribesomeconnectionsbetweenspectraltheory ininfinitedimensionalLiealgebras,deformationtheoryandalgebraiccurves.We studyinfinitecontinuedfractions,isospectraldeformationofperiodicJacobimatrices, generaldifferenceoperators,Cauchy–StieltjestransformsandAbelianintegralsfrom analgebraicgeometricalpointofview.Theseresultscanbeusedtoobtaininsightinto integrablesystems.
InChapter6,wepresentindetailtheGriffiths’approachandhiscohomological interpretationofthelinearizationtestforsolvingintegrablesystemswithoutreference toKac–Moodyalgebras.Hismethodisbasedontheobservationthatthetangentspace toanydeformationliesinasuitablecohomologygroupandonalgebraiccurves,higher cohomologycanalwaysbeeliminatedusingdualitytheory.Weexplainhowresults fromdeformationtheoryandalgebraicgeometrycanbeusedtoobtaininsightinto thedynamicsofintegrablesystems.TheseconditionsarecohomologicalandtheLax equationsturnouttohaveanaturalcohomologicalinterpretation.Severalnonlinear problemsinmathematicalphysicsillustratetheseresults:theTodalattice,Nahm’s equationsandthe n-dimensionalrigidbody.
InChapter7,thenotionofalgebraicallycompletelyintegrableHamiltonian systemsintheAdler–vanMoerbekesenseisexplained,andtechniquestofindand solvesuchsystemsarepresented.Theseareintegrablesystemswhosetrajectoriesare straightlinemotionsonAbelianvarieties(complexalgebraictori).Wemake,viathe Kowalewski–Painlevéanalysis,astudyofthelevelmanifoldsofthesystems,which aredescribedexplicitlyasbeingaffinepartofAbelianvarietiesandtheflowcanbe solvedbyquadrature,thatistosaytheirsolutionscanbeexpressedintermsof Abelianintegrals.WedescribeanexplicitembeddingoftheseAbelianvarietiesthat completethegenericinvariantsurfacesintoprojectivespaces.Manyproblemsare studiedindetail:theEulerproblemofarigidbody,theKowalewskitop,the Hénon–Heilessystem,Manakovgeodesicflowonthegroup SO (4),geodesicflow on SO (4) withaquarticinvariant,geodesicflowon SO (n) foraleftinvariant metric,theperiodicfive-particleKac–vanMoerbekelattice,generalizedperiodic Todasystems,theGross–NeveusystemandtheKolossofpotential.
InChapter8,wediscussthestudyofgeneralizedalgebraiccompletelyintegrable systems.Therearemanyexamplesofdifferentialequationsthathavetheweak Painlevépropertythatallmovablesingularitiesofthegeneralsolutionhaveonlya finitenumberofbranches,andsomeinterestingintegrablesystemsappearas coveringsofalgebraiccompletelyintegrablesystems.Theinvariantvarietiesare coveringsofAbelianvarietiesandthesesystemsarecalledalgebraiccompletely integrableinthegeneralizedsense.ThesesystemsareLiouvilleintegrableandbythe Arnold–Liouvilletheorem,thecompactconnectedmanifoldsinvariantbythereal flowsaretori,therealpartsofcomplexaffinecoveringsofAbelianvarieties.Mostof thesesystemsofdifferentialequationspossesssolutionsthatareLaurentseriesof t1/n (t beingcomplextime)andwhosecoefficientsdependrationallyoncertain
algebraicparameters.Wediscusssomeinterestingexamples:Ramani–Dorizzi–Grammaticos(RDG)potential,theHénon–Heilessystem,theGoryachev–Chaplygin top,aseven-dimensionalsystemandtheLagrangetop.
Chapter9coversthestationarySchrödingerequation,theintegral Gelfand–Levitanequationandtheinversescatteringmethodusedtosolveexactlythe Korteweg–deVries(KdV)equation.Thelatterisauniversalmathematicalmodelfor thedescriptionofweaklynonlinearlongwavepropagationindispersivemedia.The studyofthisequationisthearchetypeofanintegrablesystemandisoneofthemost fundamentalequationsofsolitonphenomena.
InChapter10,westudysomegeneralitiesonthealgebraofinfiniteorder differentialoperators.ThealgebrasofVirasoro,Heisenbergandnonlinearevolution equationssuchastheKdV,BoussinesqandKadomtsev–Petviashvili(KP)equations playacrucialroleinthisstudy.Wemakeacarefulstudyofsomeconnectionbetween pseudo-differentialoperators,symplecticstructures,KPhierarchyandtaufunctions basedontheSato–Date–Jimbo–Miwa–Kashiwaratheory.Afewotherconnections andideasconcerningtheKdVandBoussinesqequationsandtheGelfand–Dickey flows,theHeisenbergandVirasoroalgebrasaregiven.ThestudyoftheKPandKdV hierarchies,theuseoftaufunctionsrelatedtoinfinitedimensionalGrassmannians, Fayidentities,vertexoperatorsandtheHirota’sbilinearformalismledtoobtaining remarkablepropertiesconcerningthesealgebrassuchas,forexample,theexistence ofaninfinitefamilyoffirstintegralsfunctionallyindependentandininvolution.
Itiswellknownthatwhenstudyingintegrablesystems,ellipticfunctionsand integrals,compactRiemannsurfacesoralgebraiccurves,Abeliansurfaces(aswellas thebasictechniquestostudytwo-dimensionalalgebraiccompletelyintegrable systems)playacrucialrole.Thesefacts,whichmaybewellknowntothealgebraic reader,canbefound,forexample,inAdlerandvanMoerbeke(2004);Fay(1973); GriffithsandHarris(1978);Lesfari(2015b)andVanhaecke(2001).
IwouldliketothankandamgratefultoP.vanMoerbekeandL.Haine,fromwhom Ilearnedmuchofthissubjectthroughconversationsandremarks.Iwouldalsoliketo thanktheeditorsfortheirinterest,seriousnessandprofessionalism.Finallymythanks gotomywifeandourchildrenformuchencouragementandundeniablesupport,who helpedbringthisbookintobeing.
AhmedL ESFARI
September2021
SymplecticManifolds
1.1.Introduction
Thischapterisdevotedtothestudyofsymplecticmanifoldsandtheirconnection withHamiltoniansystems.Itiswellknownthatsymplecticmanifoldsplayacrucial roleinclassicalmechanics,geometricalopticsandthermodynamics,andcurrently haveconqueredarichterritory,assertingthemselvesasacentralbranchof differentialgeometryandtopology.Inadditiontotheiractivityasanindependent subject,symplecticmanifoldsarestronglystimulatedbyimportantinteractionswith manymathematicalandphysicalspecialties,amongothers.Theaimofthischapteris tostudysomepropertiesofsymplecticmanifoldsandHamiltoniandynamical systems,andtoreviewsomeoperationsonthesemanifolds.
Thischapterisorganizedasfollows.Inthesecondsection,webeginbybriefly recallingsomenotionsaboutsymplecticvectorspaces.Thethirdsectiondefinesand developsexplicitcalculationofsymplecticstructuresonadifferentiablemanifold andstudiessomeimportantproperties.Theforthsectionisdevotedtothestudyof somepropertiesofone-parametergroupsofdiffeomorphismsorflow,Liederivative, interiorproductandCartan’sformula.Wereviewsomeinterestingpropertiesand operationsondifferentialforms.Thefifthsectiondealswiththestudyofacentral theoremofsymplecticgeometry,namelyDarboux’stheorem:thesymplectic manifolds (M,ω ) ofdimension 2m arelocallyisomorphicto (R2m ,ω ).Thesixth sectioncontainssometechnicalstatementsconcerningHamiltonianvectorfields. ThelatterformaLiesubalgebraofthespacevectorfieldandweshowthatthematrix associatedwithaHamiltoniansystemformsasymplecticstructure.Several propertiesconcerningHamiltonianvectorfields,theirconnectionwithsymplectic manifolds,PoissonmanifoldsorHamiltonianmanifoldsaswellassomeinteresting examplesarestudiedintheseventhsection.Wewillseeintheeightsectionhowto determineasymplecticstructureontheorbitofthecoadjointrepresentationofaLie group.Sectionnineisdedicatedtotheexplicitdeterminationofsymplecticstructures
Systems, First Edition. Ahmed Lesfari
onadjointandcoadjointorbitsofaLiegroup SO (n).Someexercisesareproposed inthelastsection.
1.2.Symplecticvectorspaces
D EFINITION 1.1.– Asymplecticspace (E,ω ) isafinitedimensionalrealvectorspace E withabilinearform ω : E × E −→ R,whichisalternating(orantisymmetric), thatis, ω (x,y )= ω (y,x), ∀x,y ∈ E ,andnon-degenerate,thatis, ω (x,y )=0, ∀y ∈ E =⇒ x =0.Theform ω isreferredtoassymplecticform(orsymplectic structure).
Thedimensionofasymplecticvectorspaceisalwayseven.Weshow(usinga reasoningsimilartotheGram–Schmidtorthogonalizationprocess)thatany symplecticvectorspace (E,ω ) hasabase (e1 ,...,e2m ) calledsymplecticbasis(or canonicalbasis),satisfyingthefollowingrelations: ω (em+i ,ej )= δij and ω (ei ,ej )= ω (em+i ,em+j )=0.Notethateach em+i isorthogonaltoallbase vectorsexcept ei .Intermsofsymplecticbasicvectors (e1 ,...,e2m ),thematrix (ωij ) where ωij ≡ ω (ei ,ej ) hastheform
ω11 ...ω12m . . ω2m1 ...ω2m2m
= 0 Im Im 0 , where Im denotesthe m × m unitmatrix.
E XAMPLE 1.1.– R2m withtheform ω (x,y )= m k =1 (xm+k yk xk ym+k ), x ∈ R2m , y ∈ R2m ,isasymplecticvectorspace.Let (e1 ,...,em ) beanorthonormalbasisof Rm .Then, ((e1 , 0),..., (em , 0), (0,e1 ),..., (0,em )) isasymplecticbasisof R2m .
Let (E,ω ) beasymplecticvectorspaceand F avectorsubspaceof E .Let F ⊥ = {x ∈ E : ∀y ∈ F,ω (x,y )=0} betheorthogonal(symplectic)of F .
D EFINITION 1.2.– Thesubspace F isisotropicif F ⊂ F ⊥ ,coisotropicif F ⊥ ⊂ F , Lagrangianif F = F ⊥ andsymplecticif F ∩ F ⊥ = {0}
If F , F1 and F2 aresubspacesofasymplecticspace (E,ω ),then
dim F +dim F ⊥ =dim E, (F ⊥ )⊥ = F,
F1 ⊂ F2 =⇒ F ⊥ 2 ⊂ F ⊥ 1 , (F1 ∩ F2 )⊥ = F ⊥ 1 + F ⊥ 2 ,F ⊥ 1 ∩ F ⊥ 2 =(F1 + F2 )⊥ ,
F iscoisotropicifandonlyif F ⊥ isisotropicand F isLagrangianifandonlyif F isisotropicandcoisotropic.
1.3.Symplecticmanifolds
D EFINITION 1.3.– Let M beaneven-dimensionaldifferentiablemanifold.A symplecticstructure(orsymplecticform)on M isaclosednon-degenerate differential 2-form ω on M .Thenon-degeneracyconditionmeansthat: ∀x ∈ M , ∀ξ =0, ∃η : ω (ξ,η ) =0, (ξ,η ∈ Tx M ).Thepair (M,ω ) (orsimply M )iscalleda symplecticmanifold.
Atapoint p ∈ M ,wehaveanon-degenerateantisymmetricbilinearformonthe tangentspace Tp M ,whichexplainswhythedimensionofthemanifold M iseven.
E XAMPLE 1.2.– R2m withthe 2-form ω =
=1 dxk ∧ dyk isasymplectic manifold.Thevectors ∂ ∂x1
R
, constituteasymplecticbasisofthetangentspace T R2m = R2m .Similarly, Cm with theform ω = i 2 m k =1 dzk ∧ dz k isasymplecticmanifold.Thisformcoincideswith thepreviousformbymeansoftheidentification Cm R2m , zk = xk + iyk . Riemannsurfaces,Kählerianmanifoldsandcomplexprojectivemanifoldsare symplecticmanifolds.Anotherclassofsymplecticmanifoldsconsistsofthe coadjointorbits(seesection1.8).
Wewillseethatthecotangentbundle T ∗ M (i.e.theunionofallcotangentspaces of M )admitsanaturalsymplecticstructure.ThephasespacesoftheHamiltonian systemsstudiedbelowaresymplecticmanifoldsandoftentheyarecotangentbundles equippedwiththecanonicalstructure.
T HEOREM 1.1.–Let M beadifferentiablemanifoldofdimension m and T ∗ M its cotangentbundle.Then T ∗ M possessesasymplecticstructureandinalocal coordinate (x1 ,...,xm ,y1 ,...,ym ),theform ω isgivenby ω = m k =1 dxk ∧ dyk .
P ROOF .–Let (U,ϕ) bealocalchartintheneighborhoodof p ∈ M ,andconsiderthe application ϕ : U ⊂ M −→ Rm , p −→ ϕ(p)= m k =1 xk ek ,where ek arethevectors basisof Rm .Considerthecanonicalprojections TM −→ M ,and T (T ∗ M ) −→ T ∗ M ,oftangentbundles,respectively,to M and T ∗ M ontheirbases.Wenote π ∗ : T ∗ M −→ M ,thecanonicalprojectionand dπ ∗ : T (T ∗ M ) −→ TM ,itslinear tangentapplication.Wehave ϕ∗ : T ∗ M −→ R2m , α −→ ϕ∗ (α)= m k =1 (xk ek + yk εk ),where εk arethebasicformsof T ∗ Rm and α denotes αp ∈ T ∗ M .So,if α isa 1-formon M and ξα isavectortangentto T ∗ M ,then dϕ∗ : T (T ∗ M ) −→ T R2m = R2m , ξα −→ dϕ∗ (ξα )= m k =1 (βk ek + γk εk ),where βk , γk arethecomponents of ξα inthelocalchartof R2m .Consider λα (ξα )= α(dπ ∗ ξα )= α(ξ ),where ξ is
atangentvectorto M .Let (x1 ,...,xm ,y1 ,...,ym ) beasystemoflocalcoordinates compatiblewithalocaltrivializationofthetangentbundle T ∗ M .Letusshowthat:
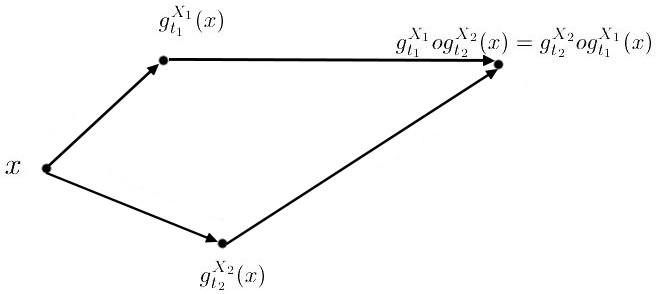
Indeed,let (x1 ,...,xm ) beasystemoflocalcoordinatesaround p ∈ M .Since ∀α ∈ T ∗ M , α = m k =1 αk dxk ,thenbydefininglocalcoordinates y1 ,...,ym by yk (α)= yk , k =1,...,m,the 1-form λ iswrittenas λ = m k =1 yk dxk .Theform λ onthecotangentbundle T ∗ M (doingcorrespondence λα to α)iscalledLiouville form.Wehave λ(α)= m k =1 yk (α)dxk (α), λ(α)(ξα )= m k =1 yk (α)dxk (α) m j =1 βj ej + γj εj = m k =1 yk βk = λα (ξα ), λ = m k =1 yk dxk .Thesymplectic structureof T ∗ M isgivenbytheexteriorderivativeof λ,thatis,the 2-form ω = dλ.Theforms λ and ω arecalledcanonicalformson T ∗ M .Wecanvisualize allthiswiththehelpofthefollowingdiagram:
Theform ω isclosed: dω =0 since d ◦ d =0 anditisnon-degenerate.To showthislastproperty,justnotethattheformiswelldefinedindependentlyofthe chosencoordinatesbutwecanalsoshowitusingadirectcalculation.Indeed,let ξ =(ξ1 ,...,ξ2m ) ∈ Tp M and η =(η1 ,...,η2m ) ∈ Tp M .Wehave
ω (ξ,η )= m k =1 dxk ∧ dyk (ξ,η )= m k =1 (dxk (ξ )
Since dxk (ξ )= ξm+k isthe (m + k )thcomponentof ξ and dyk (ξ )= ξk isthe k thcomponentof ξ ,then
k )=(ξ1 ...ξ2m ) O I IO ⎛ ⎜ ⎝ η1 . . . η2m ⎞ ⎟ ⎠ , with O thenullmatrixand I theunitmatrixoforder m.Then,forall x ∈ M andfor all ξ =(ξ1 ,...,ξ2m ) =0,itexists η =(ξm+1 ,...,ξ2m , ξ1 ,..., ξm ) suchthat:
ω (ξ,η )= m k =1 (ξm+k
k ηm+k
ω (ξ,η )= m k =1 ξ 2 m+k ξ 2 k =0,because ξk =0, ∀k =1,..., 2m.Inthelocal
coordinatesystem (x1 ,...,xm ,y1 ,...,ym ),thissymplecticformiswrittenas ω = n k =1 dxk ∧ dyk ,whichcompletestheproof.
Amanifold M issaidtobeorientableifthereexistson M anatlassuchthatthe Jacobianofanychangeofchartisstrictlypositiveorif M hasavolumeform(i.e.a differentialformthatdoesnotvanishanywhere).Forexample, Rn isorientedbythe volumeform dx1 ∧ ... ∧ dxn .Thecircle S 1 isorientedby dθ .Thetorus T 2 = S 1 × S 1 isorientedbythevolumeform dθ ∧ dϕ.Allholomorphicmanifoldsareorientable.
T HEOREM 1.2.–(a)Acloseddifferential 2-form ω onadifferentiablemanifold M of dimension 2m issymplectic,ifandonlyif, ω m isavolumeform.(b)Anysymplectic manifoldisorientable.(c)Anyorientablemanifoldofdimensiontwoissymplectic. However,inevendimensionslargerthan 2,thisisnolongertrue.
P ROOF .–(a)Thisisduetothefactthatthenon-degeneracyof ω isequivalenttothe factthat ω m isneverzero.(b)Wehave ω = dx1 ∧ dxm+1 + ··· + dxm ∧ dx2m ina systemofsymplecticcharts (x1 ,...,x2m ).Therefore, ω m = dx1 ∧ dxm+1 ∧ ... ∧ dxm ∧ dx2m =( 1) m(m 1) 2 dx1 ∧ dx2 ∧ ... ∧ dx2m ,whichmeansthatthe 2m-form ω m isa volumeformonthemanifold M andthereforethisoneisorientable.Theorientation associatedwiththedifferentialform ω isthecanonicalorientationof R2m .(c)This resultsfromthefactthatanydifferential 2-formona 2-manifoldisalwaysclosed.
T HEOREM 1.3.–Let α beadifferential 1-formonthemanifold M and α∗ λ the reciprocalimageoftheLiouvilleform λ onthecotangentbundle T ∗ M .Then, α
P ROOF .–Since α : M −→ T ∗ M ,wecanconsiderthereciprocalimagethatwe note α∗ : T ∗ T ∗ M −→ T ∗ M ,of λ : T ∗ M −→ T ∗ T ∗ M (Liouvilleform),such that,foranyvector ξ tangentto M ,wehavetherelation α∗ λ(ξ )= λ(α)(dαξ ).Since dα isanapplication TM −→ TT ∗ M ,then α∗ λ(ξ )= λ(α)(dαξ )= λα (dαξ )= αdπ ∗ dα(ξ )= αd(π ∗ α)(ξ )= α(ξ ),because π ∗ α(p)= p where p ∈ M andtheresult follows.
Asubmanifold N ofasymplecticmanifold M iscalledLagrangianifforall p ∈ N ,thetangentspace Tp N coincideswiththefollowingconfigurationspace {η ∈ Tp M : ωp (ξ,η )=0, ∀ξ ∈ Tp N}.Onthisspace,the 2-form dxk ∧ dyk thatdefines thesymplecticstructureisidenticallyzero.Lagrangiansubmanifoldsareconsidered amongthemostimportantsubmanifoldsofsymplecticmanifolds.Notethat dim N = 1 2 dim M andthatforallvectorfields X , Y on N ,wehave ω (X,Y )=0.
E XAMPLE 1.3.–If (x1 ,...,xm ,y1 ,...,ym ) isalocalcoordinatesystemonanopen U ⊂ M ,thenthesubsetof U definedby y1 = = ym =0 isaLagrangian submanifoldof M .Thesubmanifold α(M ) isLagrangianin T ∗ M ifandonlyifthe form α isclosedbecause 0= α∗ ω = α∗ ( dλ)= d(α∗ λ)= dα
Let M beadifferentiablemanifold, T ∗ M itscotangentbundlewiththesymplectic form ω , sα : U −→ T ∗ M , p −→ α(p),asectiononanopen U ⊂ M .Fromthe localexpressionof ω (theorem1.6),wededucethatthenullsectionofthebundle T ∗ M isaLagrangiansubmanifoldof T ∗ M .If sα (U ) isaLagrangiansubmanifold of T ∗ M ,then sα iscalledtheLagrangiansection.Wehave(theorem1.8), s∗ α λ = α, andaccordingtothepreviousexample, sα (U ) isaLagrangiansubmanifoldof T ∗ M ifandonlyiftheform α isclosed.Let (M,ω ), (N,η ) betwosymplecticmanifolds ofthesamedimensionand f : M −→ N ,adifferentiableapplication.Wesaythat f isasymplecticmorphismifitpreservesthesymplecticforms,thatis,if f satisfies f ∗ η = ω .When f isadiffeomorphism,wesaythat f isasymplecticdiffeomorphism or f isasymplectomorphism.
T HEOREM 1.4.–(a)Asymplecticmorphismisalocaldiffeomorphism.(b)A symplectomorphismpreservestheorientation.
P ROOF .–(a)Indeed,sincethe 2-form ω isnon-degenerate,thenthedifferential df (p): Tp M −→ Tp N , p ∈ M ,isalinearisomorphismandaccordingtothelocalinversion theorem, f isalocaldiffeomorphism.Anotherproofistonotethat f ∗ η m =(f ∗ η )m = ω m .Themap f hasconstantrank 2m because ω m and η m arevolumeformson M and N ,respectively.Andtheresultfollows.(b)Itisdeducedfrom(a)thatthesymplectic diffeomorphismsorsymplectomorphismspreservethevolumeformandthereforethe orientation.TheJacobiandeterminantofthetransformationis +1.
R EMARK 1.1.–Notethattheinverse f 1 : N −→ M ofasymplectomorphism f : M −→ N isalsoasymplectomorphism.
Let (M,ω ), (N,η ) betwosymplecticmanifolds, pr1 : M × N −→ M , pr2 : M × N −→ N ,theprojectionsof M × N onitstwofactors.Theforms pr ∗ 1 ω + pr ∗ 2 η and pr ∗ 1 ω pr ∗ 2 η ontheproduct M × N aresymplecticforms.Takethecasewhere dim M =dim N =2m andconsideradifferentiablemap f : M −→ N ,aswell asitsgraphdefinedbytheset A = {(x,y ) ∈ M × N : y = f (x)}.Theapplication g definedby g : M −→ A, x −→ (x,f (x)) isadiffeomorphism.Theset A isa 2m-dimensionalLagrangiansubmanifoldof (M × N,pr ∗ 1 ω pr ∗ 2 η ) ifandonlyif thereciprocalimageof pr ∗ 1 ω pr ∗ 2 η byapplication g istheidenticallyzeroformon M .Forthedifferentiablemap f tobeasymplecticmorphism,itisnecessaryand sufficientthatthegraphof f isaLagrangiansubmanifoldoftheproductmanifold (M × N,pr ∗ 1 ω pr ∗ 2 η ).
T HEOREM 1.5.–(a)Let f : M −→ M beadiffeomorphism.Then,theapplication f ∗ : T ∗ M −→ T ∗ M isasymplectomorphism.(b)Let g : T ∗ M −→ T ∗ M bea diffeomorphismsuchthat: g ∗ λ = λ.Then,thereisadiffeomorphism f : M −→ M suchthat: g = f ∗ .
P ROOF .–(a)Letusshowthat f ∗∗ ω = ω .Wehave
andtherefore,
[1.1] and
and f
ω = ω .(b)Since g
λ = λ,then g
(η )= λ(dgη )= ω (ξ,dgη )= λ(η )= ω (ξ,η ).Moreover,wehave g ∗ ω = ω ,hence ω (dgξ,dgη )= ω (ξ,η )= ω (ξ,dgη ) and ω (dgξ ξ,dgη )=0, ∀η .Sincetheform ω isnon-degenerate,wededucethat dgξ = ξ andthat g preservestheintegralcurvesof ξ .Onthenullsectionofthetangentbundle (i.e.onthemanifold),wehave ξ =0 andthen g |M isanapplication f : M −→ M . Letusshowthat: f ◦ π ∗ ◦ g = π ∗ = f ◦ π ∗ ◦ f ∗ .Indeed,takingthedifferential,weget df ◦ dπ ∗ ◦ dg (ξ )= df ◦ dπ ∗ (ξ )= df (ξp ),because dg (ξ )= ξ and ξp ≡ dπ ∗ (ξ )),hence df ◦ dπ ∗ ◦ dg (ξ )= ξp = dπ ∗ (ξ ).Therefore, df ◦ dπ ∗ ◦ dg = dπ ∗ , f ◦ π ∗ ◦ g = π ∗ . Since f ◦ π ∗ ◦ f ∗ = π ∗ (accordingto[1.1]),so g = f ∗ .
T HEOREM 1.6.–Let I : T ∗ x M −→ Tx M , ω 1 ξ −→ ξ ,where ω 1 ξ (η )= ω (η,ξ ), ∀η ∈ Tx M .Then I isanisomorphismgeneratedbythesymplecticform ω
P ROOF .–Denoteby I 1 themap I 1 : Tx M −→ T ∗ x M , ξ −→ I 1 (ξ ) ≡ ω 1 ξ ,with I 1 (ξ )(η )= ω 1 ξ (η )= ω (η,ξ ), ∀η ∈ Tx M .Theform ω beingbilinear,thenwe have I 1 (ξ1 + ξ2 )(η )= I 1 (ξ1 )(η )+ I 1 (ξ2 )(η ), ∀η ∈ Tx M .Toshowthat I 1 isbijective,itsufficestoshowthatitisinjective(because dim Tx M =dim T ∗ x M ). Theform ω isnon-degenerate,anditfollowsthat KerI 1 = {0}.Hence, I 1 isan isomorphismandconsequently I isalsoanisomorphism.
1.4.Vectorsfieldsandflows
Let M beadifferentiablemanifoldofdimension m.Let TM = x∈M Tx M , bethebundletangentto M (unionofspacestangentto M atallitspoints x).This bundlehasastructureofadifferentiablemanifoldofdimension 2m andallowsusto immediatelytransfertomanifoldsthetheoryofordinarydifferentialequations.
D EFINITION 1.4.– Avectorfield(alsocalledatangentbundlesection)on M isan application,notedby X ,whichatanypoint x ∈ M associatesatangentvector Xx ∈ Tx M .Inotherwords,itisanapplication: X : M −→ TM ,suchthatif π : TM −→ M ,isthenaturalprojection,thenwehave π ◦ X = idM
Notethatthediagram
M X −→ TM idM ↓π M
iscommutative.Inalocalcoordinatesystem (x1 ,...,xm ) inaneighborhood U ⊂ M , thevectorfield X iswrittenintheform X = m k =1 fk (x) ∂ ∂xk , x ∈ U ,wherethe functions f1 ,...,fm : U −→ R,arethecomponentsof X withrespectto (x1 ,...,xm ).Avectorfield X isdifferentiableifitscomponents fk (x) are differentiablefunctions.Thisdefinitionofdifferentiabilitydoesnotobviouslydepend onthechoiceofthelocalcoordinatesystem.Indeed,if (y1 ,...,ym ) isanotherlocal coordinatesystemin U ,then X = m k =1 hk (x) ∂ ∂yk , x ∈ U ,where h1 ,...,hm : U −→ R,arethecomponentsof X inrelationto (y1 ,...,ym ) andthe resultfollowsfromthefactthat hk (x)= m l=1 ∂yk ∂xl fl (x ), x ∈ U .Tothevectorfield X correspondstoasystemofdifferentialequations
D EFINITION 1.5.– Adifferentiablevectorfield X over M iscalledadynamical system.
Avectorfieldiswrittenlocallyintheform[1.2].
Figure1.1. Vectorfield
Figure1.2. Tangentspace
D EFINITION 1.6.– Anintegralcurve(ortrajectory)ofavectorfield X isa differentiablecurve γ : I −→ M , t −→ γ (t),suchthat ∀t ∈ I , dγ (t) dt = X (γ (t)), where I isanintervalof R.
If m k =1 fk (x) ∂ ∂xk isthelocalexpressionof X ,thentheintegralcurves(or trajectories)of X arethesolutions γ (t)= {xk (t)} of[1.2].Weassumeinthe followingthatthevectorfield X isdifferentiable(ofclass C ∞ )andwithcompact support(i.e. X iszerooutsideofacompactof M ).Thiswillespeciallybethecaseif themanifold M iscompact.Givenapoint x ∈ M ,wedenoteby g X t (x) (orquite simply gt (x))thepositionof x afteradisplacementofaduration t ∈ R

Wethereforehaveanapplication g X t : M −→ M , t ∈ R,whichisa diffeomorphism(aone-to-onedifferentiablemappingwithadifferentiableinverse), byvirtueofthetheoryofdifferentialequations.Moreprecisely,tothevectorfield X weassociateaone-parametergroupofdiffeomorphisms g X t on M ,thatis,a differentiableapplication(ofclass C ∞ ): M × R −→ M ,verifyingagrouplaw: (i) ∀t ∈ R, g X t : M −→ M isadiffeomorphismof M on M .(ii) ∀t,s ∈ R, g X t+s = g X t ◦ g X s .Condition(ii)meansthatthecorrespondence t −→ g X t isa homomorphismoftheadditivegroup R inthegroupofdiffeomorphismsfrom M to M .Itimpliesthat g X t = g X t 1 ,because g X 0 = idM istheidenticaltransformation thatleaveseachpointinvariant.
D EFINITION 1.7.– Theone-parametergroupofdiffeomorphism g X t on M iscalled flow.Itadmitsthevectorfield X forvelocityfield d dt g X t (x)= X g X t (x) ,withthe initialcondition: g X 0 (x)= x.
Obviously, d dt g X t (x) t=0 = X (x).Sothroughtheseformulas g X t (x) isthecurve onthemanifold,whichpassesthrough x suchthatthetangentateachpointisthe vector X g X t (x) .Wewillnowseehowtoconstructtheflow g X t overthewhole variety M
T HEOREM 1.7.–Thevectorfield X generatesauniqueone-parametergroupof diffeomorphismof M .
P ROOF .–a)Constructionof g X t forsmall t.For x fixed,thedifferentialequation d dt g X t (x)= X g X t (x) ,functionof t withtheinitialcondition: g X 0 (x)= x,admitsa
Figure1.3. Flow
uniquesolution g X t definedintheneighborhoodofthepoint x0 anddependingonthe initialcondition C ∞ .So g X t islocallyadiffeomorphism.Therefore,foreachpoint x0 ∈ M, wecanfindaneighborhood U (x0 ) ⊂ M ,apositiverealnumber ε ≡ ε (x0 ) suchthatforall t ∈ ] ε,ε[,thedifferentialequationinquestionwithitsinitial conditionadmitsauniquesolutiondifferentiable g X t (x) definedin U (x0 ) and verifyingthegrouprelation g X t+s (x)= g X t ◦ g X s (x),with t,s,t + s ∈ ] ε,ε[.Indeed, letuspose x1 = g X t (x), t fixedandconsiderthesolutionofthedifferentialequation satisfyingintheneighborhoodofthepoint x0 totheinitialcondition g X s=0 = x1 .This solutionsatisfiesthesamedifferentialequationandcoincidesatapoint g X t (x)= x1 , withthefunction g X t+s .Therefore,byuniquenessofthesolutionofthedifferential equation,thetwofunctionsarelocallyequal.Therefore,theapplication g X t islocally adiffeomorphism.Werecallthatthevectorfield X issupposedtobedifferentiable (ofclass C ∞ )andwithcompactsupport K .Fromtheopencoverof K formedby U (x),wecanextractafinitesubcover (Ui ),since K iscompact.Letusdenote εi by thenumbers ε correspondingto Ui andput ε0 =inf(εi ), g X t (x)= x, x/ ∈ K . Therefore,thedifferentialequationinquestionadmitsauniquesolution g X t on M × ] ε0 ,ε0 [ verifyingthegrouprelation: g X t+s = g X t ◦ g X s ,theinverseof g X t being g X t andso g X t isadiffeomorphismfor t smallenough.
b)Constructionof g X t forall t ∈ R.Accordingto(a),itsufficestoconstruct g X t for t ∈ ]−∞, ε0 [ ∪ ]ε0 , ∞[.Wewillseethattheapplications g X t aredefinedaccordingto themultiplicationlawofthegroup.Notethat t canbewrittenintheform t = k ε0 2 + r , with k ∈ Z and r ∈ 0, ε0 2 .Letusconsider,for t ∈ R∗ + andfor t ∈ R∗ , g X t = g X ε
respectively.Thediffeomorphisms g X ± ε0 2 and g X r weredefinedin(a),andwededuce thatforanyreal t, g X t isadiffeomorphismdefinedgloballyonthemanifold M .
C OROLLARY 1.1.–Everysolutionofthedifferentialequation dx(t) dt = X (x(t)), x ∈ M ,withtheinitialcondition x (for t =0),canbeextendedindefinitely.Thevalueof thesolution g X t (x) attheinstant t isdifferentiablewithrespectto t and x.
Withaslightabuseofnotation,wecanwritetheprecedingdifferentialequation intheformofthesystemofdifferentialequations[1.2]withtheinitialconditions x1 ,...,xm for t =0.Withthevectorfield X ,weassociatethefirst-orderdifferential operator LX .Wereferheretothedifferentiationoffunctionsinthedirectionofthe field X .Wehave LX : C ∞ (M ) −→C ∞ (M ), F −→ LX F (x)= d dt F g X t (x) t=0 , x ∈ M .Here, C ∞ (M ) designatesthesetoffunctions F : M −→ R ofclass C ∞ .The operator LX islinear: LX (α1 F1 + α2 F2 )= α1 LX F1 + α2 LX F2 , (α1 ,α2 ∈ R), andsatisfiesLeibniz’sformula: LX (F1 F2 )= F1 LX F2 + F2 LX F1 .Since LX F (x) onlydependsonthevaluesof F intheneighborhoodof x,wecanthereforeapplythe
operator LX withouttheneedtoextendthemtothewholemanifold M .Let (x1 ,...,xm ) belocalcoordinateson M .Inthiscoordinatesystem,thevector X is givenbyitscomponents f1 ,...,fm andtheflow g X t isgivenbythesystemof differentialequations[1.2].Sothederivativeofthefunction F = F (x1 ,...,xm ) in thedirection X is LX F = f1 ∂F ∂x1 + + fm ∂F ∂xm .Inotherwords,inthecoordinates (x1 ,...,xm ) theoperator LX hastheform LX = f1 ∂ ∂x1 + ··· + fm ∂ ∂xm .
D EFINITION 1.8.– Wesaythattwovectorfields X1 and X2 onamanifold M commute (orarecommutative)ifandonlyifthecorrespondingflowscommute,
Commutativeflows
T HEOREM 1.8.–Twovectorfields X1 and X2 onamanifold M commuteifandonly if, [LX1 ,LX2 ] ≡ L
P ROOF .–a)Letusfirstshowthattheconditionisnecessary.Notethat,
Indeed,accordingtothedefinitionof LX2 ,wefind,
Figure1.4.
Thus,
= LX1 G(x) bydefinitionof LX1 , = LX1 LX2 F (x) .
Likewise,wehave
Therefore,
Soif X1 and X2 commuteon
M ,thenaccordingtotheaboveformula, (
, ∀F ∈ C ∞ (M ), ∀x ∈ M .Consequently,
,thatis,thatthe conditionissufficient,orthat:
) , ∀F ∈C ∞ (M ), ∀x ∈ M .Letuspose ξ =
developinTaylorseriesthefunction F (
) F (
) attheneighborhoodof t1 = t2 =0.Wehave,
Letuscalculatethedifferentterms.Wehave
.Itfollows,bysymmetry,that
=0.Moreover,wededucefromthenecessarycondition andfromthefactthatthevectorfields X1 and X2 commutethefollowingrelation:
2 ∂t1 ∂t2 (F (ξ ) F (ζ ))|t
Therefore,
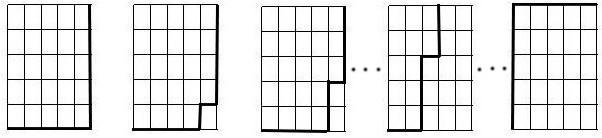
Considerthetimes t1 and t2 oftheorder ε.Wefindadifferencebetweenthetwo newpointsofthemanifold,dependingonwhetherweapplythefield X1 beforethe field X2 ortheinverse,oftheorderof ε3 . F
) F g X2 t2 ◦ g X1 t1 (x) = o ε3 .Now,if t1 and t2 arearbitraryfixedtimes,letussquare thespacebetweenthetwopathswithsquaresofsides ε.Eachsquarerepresentsthe smallspacetraveledduringasmalltime ε,eitheraccordingtothefield X1 or accordingtothefield X2 .Wehavefoundthatwhenthespacebetweentwopaths
differsfromthatofasquare,wegetadifference ε3 .Bymodifyingthepathtraveled byasquareinsuccessivestages,weobtain
bythefactthatwehave t1 ε × t2 ε stepsintermediaries.Thisisvalidforall ε;justtake ε smallenough,tendingtozero,sothat
Figure1.5. Proofofthecommutativityofflows
Sinceeveryfirst-orderlineardifferentialoperatorisgivenbyavectorfield, LX2 LX1 LX1 LX2 beingafirst-orderlineardifferentialoperator,thelatteralso correspondstosomevectorfieldthatwedenoteby X3 .
D EFINITION 1.9.– ThePoissonbracketorcommutatoroftwovectorfields X1 and X2 onthemanifold M ,denotedby X3 = {X1 ,X2 } or X3 =[X1 ,X2 ],isthevector field X3 forwhich LX3 = LX2 LX1 LX1 LX2
E XAMPLE 1.4.–ThePoissonbrackettransformsthevectorspaceofvectorfieldsover amanifoldintoLiealgebra.
Let X beavectorfieldonadifferentiablemanifold M .Wehaveshown(theorem 1.7)that X generatesauniqueone-parametergroupofdiffeomorphism g X t (whichwe alsodenoteby gt )on M ,solutiontothedifferentialequation: d dt g X t (p)= X (g X t (p)), p ∈ M ,withtheinitialcondition g X 0 (p)= p.Let ω bea k -formdifferentialon M
D EFINITION 1.10.– TheLiederivativeof ω withrespectto X isthe k -formdifferential definedby LX ω =
Ingeneral,for t =0,wehave
Forall t ∈ R,theapplication gt : R −→ R beingadiffeomorphismthen dgt and dg t aretheapplications, dgt : Tp M −→ Tgt (p) M , dg t : Tgt (p) M
Tp M
D EFINITION 1.11.– TheLiederivativeofavectorfield Y inthedirection X isdefined by LX Y = d dt g t Y t=0 =limt→0 g t (Y (gt (p))) Y (p) t
Ingeneral,for t =0,wehave
.
D EFINITION 1.12.– Theinteriorproductofa k -formdifferential ω byavectorfield X onthedifferentiablemanifold M isa (k 1)-formdifferential, iX ω ,definedby (iX ω )(X1 ,...,Xk 1 )= ω (X,X1 ,...,Xk 1 ),where X1 ,...,Xk 1 arevectorfields.
Itiseasytoshowthatif ω isa k -differentialform, λ adifferentialformofany degree, X and Y twovectorfields, f alinearmapand a aconstant,then iX +Y ω = iX ω + iY ω,iaX ω = aiX ω,iX iY ω = iY iX ω,
iX iX ω =0,iX (fω )= f (iX ω ),
iX (ω ∧ λ)=(iX ω ) ∧ λ +( 1)k ω ∧ (iX λ),iX f ∗ ω = f ∗ (ifX ω ), where f ∗ ω denotethepull-backby f .
E XAMPLE 1.5.–Letuscalculatetheexpressionoftheinteriorproductinlocal coordinates.If X = m j =1 Xj (x) ∂ ∂xj isthelocalexpressionofthevectorfieldonthe manifold M ofdimension
k -differentialform,then
Thefollowingpropertiesareofteninvolvedinsolvingpracticalproblemsusing Liederivatives.
P ROPOSITION 1.1.–a)If f : M −→ R isadifferentiablefunction,thentheLie derivativeof f istheimageof X bythedifferentialof f , LX f = df (X )= X.f . b) LX and d commute, LX ◦ d = d ◦ LX .c)Let X,X1 ,...,Xk bevectorfieldson M and ω a k -formdifferential.So
(LX ω )(X1 ,...,Xk )= LX (ω (X1 ,...,Xk )) k j =1 ω (X1 ,...,LX Xj ,...,Xk ).
d)Foralldifferentialforms ω and λ, LX (ω ∧ λ)= LX
P ROOF .–a)Indeed,wehave LX f = d dt g ∗ t f t=0 = d dt f ◦
t t=0 = df dgt dt t=0 = df (X ), and(seetheorem1.9), LX f = iX df = X.f ,hencetheresult.
b)Indeed,asthedifferentialandtheinverseimagecommute,then d ◦ LX ω = d ◦ d dt g ∗ t ω t=0 = d dt g ∗ t ◦ dω t=0 = LX ◦ dω.
c)Wehave (LX ω )(X1 ,...,Xk )= d dt g ∗ t ω (X1 ,...,Xk ) t=0 , = d dt ω (gt )(dgt X1 ,...,dgt Xk ) t=0 , = LX ω (gt )(dgt X1 ,...,dgt Xk )|t=0 + k j =1 ω (gt ) dgt X1 ,..., d dt dgt Xj ,...,dgt Xk t=0 , andtheresultisdeducedfromthefactthat d dt dgt Xj t=0 = d dt dg t Xj t=0 = LX Xj .