Tropospheric and Ionospheric
on Global Navigation Satellite Systems 1st Edition Tim H. Kindervatter
Visit to download the full and correct content document: https://ebookmass.com/product/tropospheric-and-ionospheric-effects-on-global-navig ation-satellite-systems-1st-edition-tim-h-kindervatter/
More products digital (pdf, epub, mobi) instant download maybe you interests ...
The Dynamical Ionosphere: A Systems Approach to Ionospheric Irregularity 1st Edition Massimo Materassi (Editor)
https://ebookmass.com/product/the-dynamical-ionosphere-a-systemsapproach-to-ionospheric-irregularity-1st-edition-massimomaterassi-editor/
Traditions & Encounters: A Global Perspective on the Past 7th Edition Jerry H. Bentley
https://ebookmass.com/product/traditions-encounters-a-globalperspective-on-the-past-7th-edition-jerry-h-bentley/
CISA Certified Information Systems Auditor Bundle 1st Edition Peter H. Gregory
https://ebookmass.com/product/cisa-certified-information-systemsauditor-bundle-1st-edition-peter-h-gregory/
Cross-Disciplinary Perspectives on Regional and Global Security 1st ed. Edition Pawe■ Frankowski
https://ebookmass.com/product/cross-disciplinary-perspectives-onregional-and-global-security-1st-ed-edition-pawel-frankowski/
Climate Change Science: Causes, Effects and Solutions for Global Warming 1st Edition David S-K. Ting (Editor)
https://ebookmass.com/product/climate-change-science-causeseffects-and-solutions-for-global-warming-1st-edition-david-s-kting-editor/
Satellite Soil Moisture Retrieval. Techniques and Applications 1st Edition Prashant K Srivastava
https://ebookmass.com/product/satellite-soil-moisture-retrievaltechniques-and-applications-1st-edition-prashant-k-srivastava/
Econometric Analysis Global Edition William H. Greene
https://ebookmass.com/product/econometric-analysis-globaledition-william-h-greene/
Agile Energy Systems: Global Distributed On-Site and Central Grid Power 2nd Edition Woodrow W. Clark Iii
https://ebookmass.com/product/agile-energy-systems-globaldistributed-on-site-and-central-grid-power-2nd-edition-woodrow-wclark-iii/
Modern control systems 14th Edition Robert H. Bishop
https://ebookmass.com/product/modern-control-systems-14thedition-robert-h-bishop/
TroposphericandIonosphericEffectsonGlobalNavigation SatelliteSystems
IEEEPress
445HoesLane
Piscataway,NJ08854
IEEEPressEditorialBoard
SarahSpurgeon, EditorinChief
JónAtliBenediktsson
AnjanBose
AdamDrobot
Peter(Yong)Lian
AndreasMolisch
SaeidNahavandi
JeffreyReed
ThomasRobertazzi
DiomidisSpinellis
AhmetMuratTekalp
TroposphericandIonosphericEffectson
GlobalNavigationSatelliteSystems
TimothyH.Kindervatter SciTecInc. Princeton,NJ,US
FernandoL.Teixeira
TheOhioStateUniversity Columbus,OH,US
Copyright©2022byTheInstituteofElectricalandElectronicsEngineers,Inc.Allrightsreserved.
PublishedbyJohnWiley&Sons,Inc.,Hoboken,NewJersey. PublishedsimultaneouslyinCanada.
Allrightsreserved.Nopartofthispublicationmaybereproduced,storedinaretrievalsystem,or transmitted,inanyformorbyanymeans,electronic,mechanical,photocopying,recordingor otherwise,exceptaspermittedbylaw.Adviceonhowtoobtainpermissiontoreusematerialfromthis titleisavailableathttp://www.wiley.com/go/permissions.
TherightofTimothyH.Kindervatter,andFernandoL.Teixeiratobeidentifiedastheauthorsofthis workhasbeenassertedinaccordancewithlaw.
RegisteredOffice
JohnWiley&Sons,Inc.,111RiverStreet,Hoboken,NJ07030,USA
EditorialOffice
111RiverStreet,Hoboken,NJ07030,USA
Fordetailsofourglobaleditorialoffices,customerservices,andmoreinformationaboutWiley productsvisitusatwww.wiley.com.
Wileyalsopublishesitsbooksinavarietyofelectronicformatsandbyprint-on-demand.Somecontent thatappearsinstandardprintversionsofthisbookmaynotbeavailableinotherformats.
MATLAB® isatrademarkofTheMathWorks,Inc.andisusedwithpermission.TheMathWorksdoes notwarranttheaccuracyofthetextorexercisesinthisbook.Thiswork’suseordiscussionof MATLAB® softwareorrelatedproductsdoesnotconstituteendorsementorsponsorshipbyThe MathWorksofaparticularpedagogicalapproachorparticularuseoftheMATLAB® software.While thepublisherandauthorshaveusedtheirbesteffortsinpreparingthiswork,theymakeno representationsorwarrantieswithrespecttotheaccuracyorcompletenessofthecontentsofthiswork andspecificallydisclaimallwarranties,includingwithoutlimitationanyimpliedwarrantiesof merchantabilityorfitnessforaparticularpurpose.Nowarrantymaybecreatedorextendedbysales representatives,writtensalesmaterialsorpromotionalstatementsforthiswork.Thefactthatan organization,website,orproductisreferredtointhisworkasacitationand/orpotentialsourceof furtherinformationdoesnotmeanthatthepublisherandauthorsendorsetheinformationorservices theorganization,website,orproductmayprovideorrecommendationsitmaymake.Thisworkissold withtheunderstandingthatthepublisherisnotengagedinrenderingprofessionalservices.The adviceandstrategiescontainedhereinmaynotbesuitableforyoursituation.Youshouldconsultwith aspecialistwhereappropriate.Further,readersshouldbeawarethatwebsiteslistedinthisworkmay havechangedordisappearedbetweenwhenthisworkwaswrittenandwhenitisread.Neitherthe publishernorauthorsshallbeliableforanylossofprofitoranyothercommercialdamages,including butnotlimitedtospecial,incidental,consequential,orotherdamages.
LibraryofCongressCataloging-in-PublicationData
Names:Kindervatter,TimothyH.,author.|Teixeira,FernandoL.(Fernando Lisboa),1969-author.
Title:Troposphericandionosphericeffectsonglobalnavigationsatellite systems/TimothyH.Kindervatter,FernandoL.Teixeira.
Description:Hoboken,NJ:Wiley-IEEEPress,2022.|Includes bibliographicalreferencesandindex.
Identifiers:LCCN2022017545(print)|LCCN2022017546(ebook)|ISBN 9781119863038(cloth)|ISBN9781119863045(adobepdf)|ISBN 9781119863052(epub)
Subjects:LCSH:GlobalPositioningSystem.|Troposphere.|Ionosphere.
Classification:LCCG109.5.K562022(print)|LCCG109.5(ebook)|DDC 910.285–dc23/eng20220720
LCrecordavailableathttps://lccn.loc.gov/2022017545
LCebookrecordavailableathttps://lccn.loc.gov/2022017546
CoverDesign:Wiley
CoverImage:©AndreyArmyagov/Shutterstock
Setin9.5/12.5ptSTIXTwoTextbyStraive,Chennai,India
Contents
Preface xi
1OverviewoftheGlobalPositioningSystem 1
1.1Introduction 1
1.2ApplicationsofGNSS 3
1.2.1ApplicationsofStandardGNSSPositioning 3
1.2.2ApplicationsofCentimeterandMillimeter-LevelPositioning Accuracy 4
1.2.3ApplicationsofGNSSTimingInformation 4
1.3GPSSegments 5
1.3.1SpaceSegment 5
1.3.2ControlSegment 9
1.3.3UserSegment 11
1.4KeplerianOrbits 15
1.4.1ShapeofOrbit 15
1.4.2VernalPoint 15
1.4.3KeplerElements 16
1.5SatelliteBroadcast 19
1.5.1CarrierFrequencies 20
1.5.2DigitalModulation 21
1.5.3RangingCodes 27
1.5.4NavigationMessage 34
2PrinciplesofGNSSPositioning 43
2.1Introduction 43
2.2BasicGNSSObservables 44
2.2.1Pseudorange 44
2.2.2CarrierPhase 47
2.2.3DopplerShift 52
2.3GNSSErrorSources 57
2.3.1ClockandEphemerisErrors 59
2.3.2RelativisticEffects 61
2.3.3CarrierPhaseWind-Up 67
2.3.4AtmosphericEffects 68
2.3.5Multipath,Diffraction,andInterferenceEffects 68
2.3.6Hardware-RelatedErrors 71
2.3.7DilutionofPrecision 74
2.3.8AdditionalErrorSources 74
2.4PointPositioning 75
2.4.1PositioningUsingPseudorange 76
2.4.2AccountingforRandomError 82
2.4.3FurtherConsiderationsonDilutionofPrecision 87
2.5DataCombinationsandRelativePositioning 90
2.5.1Multi-FrequencyCombinations 90
2.5.2RelativePositioning 96
3TroposphericPropagation 105
3.1Introduction 105
3.2TroposphericGroupDelay 106
3.2.1MappingFunctions 110
3.3TroposphericRefraction 112
3.4Extinction 116
3.4.1Beer–LambertLaw 116
3.4.2Scattering 119
3.4.3GaseousAbsorption 121
3.4.4HydrometeorAttenuation 122
3.5TroposphericScintillations 125
4PredictiveModelsoftheTroposphere 129
4.1Introduction 129
4.2SaastamoinenModel 130
4.2.1FirstIntegral 132
4.2.2SecondIntegral 136
4.2.3PuttingEverythingTogether 142
4.3HopfieldModel 143
4.4U.S.StandardAtmosphere 147
4.4.1ModelAssumptions 147
4.4.2ComputationalEquations 156
4.4.3DataSourcesandImplementation 160
5PhysicsoftheIonosphere 163
5.1Introduction 163
5.2Solar-TerrestrialRelations 164
5.2.1TheSun 164
5.2.2TheInterplanetaryMedium 168
5.2.3Earth’sMagneticField 170
5.2.4TheMagnetosphere 174
5.2.5Earth’sAtmosphere 181
5.3PhysicsofIonization 184
5.3.1NeutralAtmosphere 184
5.3.2Ionization 187
5.3.3RecombinationandAttachment 190
5.3.4PhotochemicalProcessesintheIonosphere 191
5.4Chapman’sTheoryofIonosphericLayerFormation 193
5.5PlasmaTransport 201
5.5.1Diffusion 202
5.5.2NeutralWinds 206
5.5.3ElectromagneticDrift 208
5.5.4CombinedEffectsofNeutralWindandElectromagneticDrift 210
5.5.5ContinuityEquation 216
6ExperimentalObservationoftheIonosphere 217
6.1Introduction 217
6.2IonosphericMeasurementTechniques 218
6.2.1Ionosondes 219
6.2.2IncoherentScatterRadar 229
6.2.3InSituMeasurements 238
6.3MorphologyoftheIonosphere 244
6.3.1CLayer 245
6.3.2DLayer 245
6.3.3ELayer 247
6.3.4SporadicELayer 248
6.3.5F1Layer 249
6.3.6F2Layer 250
6.3.7TopsideIonosphere 251
6.4VariabilityoftheIonosphere 252
6.4.1F2LayerAnomalies 252
6.4.2SolarActivity 257
6.4.3MagneticVariation 261
6.4.4IonosphericIrregularities 273
7IonosphericPropagation 277
7.1Introduction 277
7.2MagnetoionicPropagation 278
7.2.1SimplificationsoftheAppleton–HartreeEquation 284
7.3PropagationEffectsoftheBackgroundIonosphere 288
7.3.1TotalElectronContent 288
7.3.2IonosphericRefraction 294
7.3.3GroupDelayandPhaseAdvance 297
7.3.4Dispersion 306
7.3.5FaradayRotation 307
7.3.6Absorption 311
7.4Scintillations 312
7.4.1ScaleSizeofIonosphericIrregularities 313
7.4.2StatisticalDescriptionofScintillations 314
7.4.3PowerSpectraofScintillations 319
8PredictiveModelsoftheIonosphere 321
8.1Introduction 321
8.2GroupDelayModelsforSingle-FrequencyGNSSReceivers 322
8.2.1KlobucharModel 323
8.2.2NeQuick 331
8.3GlobalIonosphericScintillationModel 340
8.3.1RayTracingintheIonosphere 341
8.3.2MultiplePhaseScreenMethod 342
8.4InternationalReferenceIonosphere 346
8.4.1DataSources,Inputs,andOutputs 348
8.4.2ImportantFunctions 354
8.4.3CharacteristicHeightsandElectronDensities 359
8.4.4ElectronDensity 367
8.4.5ElectronTemperature 383
8.4.6IonTemperature 389
8.4.7IonComposition 391
8.4.8AdditionalParameters 394
Appendices
399
AReviewofElectromagneticsConcepts 401
A.1ElectromagneticWaves 401
A.1.1Maxwell’sEquationsandtheWaveEquation 401
A.1.2PlaneWaveSolutions 403
A.1.3ConstraintsViaMaxwell’sEquations 407
A.1.4PoyntingVector 409
A.2PhaseandGroupVelocity 412
A.2.1PhaseVelocity 412
A.2.2ModulatedSignalsandGroupVelocity 412
A.2.3GroupIndexofRefraction 414
A.2.4RelationshipBetweenPhaseandGroupVelocities 415
A.3Polarization 415
A.3.1LinearPolarization 416
A.3.2CircularPolarization 418
A.3.3EllipticalPolarization 420
A.3.4JonesVectorsandDecomposingPolarizations 422
A.4DerivationofRayleighScattering 426
A.4.1ElectricPotentialofanIdealDipole 426
A.4.2EffectiveDipoleMomentofaSphericalScatteringParticle 428
A.4.3Re-radiationbyaScatteringParticle 431
BElectromagneticPropertiesofMedia 439
B.1Introduction 439
B.2DielectricPolarization 439
B.2.1InducedDielectricPolarization 440
B.2.2ElectricSusceptibility 441
B.3LossyandDispersiveMedia 442
B.3.1Absorption 442
B.3.2Dispersion 443
B.3.3GraphicalAnalysis 443
B.3.4MultipleResonances 447
B.4ConductingMedia 448
B.4.1Time-VaryingConductionCurrent 448
B.4.2PropagationinConductingMedia 450
B.4.3CombinedEffectsofDispersionandConduction 453
B.5Kramers–KronigRelations 453
B.6AnisotropicMedia 456
B.6.1DielectricTensorProperties 456
B.6.2WaveEquationinAnisotropicMedia 458
B.6.3OpticalAxes 460
B.6.4IndexEllipsoid 460
B.6.5PhaseandGroupVelocityinAnisotropicMedia 464
B.6.6BirefringenceandSpatialWalk-offin ⃗ k Surfaces 466
B.7GyrotropicMedia 468
B.7.1GyrotropicSusceptibilityTensor 468
B.7.2PropagationinGyrotropicMedia 471
Bibliography 475 Index 497
Preface
GlobalNavigationSatelliteSystems(GNSS)havearangeofapplicationsthat includenotonlynavigation,butalsomappingandsurveying,satelliteorbit determination,andapreciselysynchronizedglobaltimereference.Thisbookis focusedontheatmosphericeffectswhichimpactthepropagationofthesignals transmittedfromGNSSsatellitesinorbittoreceiversontheground.Thebook alsocoversvariouspredictivemodelswhichseektoquantifysucheffects.
Inordertofullyappreciatethelimitationsimposedbyatmosphericpropagation effectsonGNSSperformanceandthedesignconsiderationsthataimtoaddress theseeffects,thefirsttwochaptersofthisbookprovideanoverviewofGNSS. Chapter1introducestheGlobalPositioningSystem(GPS)intheroleofan exemplaryGNSS.System-leveldesignandlogisticsofGPSarepresentedasa concreteexampleofhowatypicalGNSSoperates.Inparticular,thischapter discussestherolesofthethreemajorsegmentsoftheGPSsystemandadiscussionoftheGPScommunicationsystem,includingthecarrierfrequenciesand modulationscheme,rangingcodes,andtheso-callednavigationmessage(i.e.the datamodulatedontotheGPSsignal).
Chapter2broadensthefocustoincludeallmodernGNSSsignals,anddiscusses thefundamentalsofGNSSpositioning.Thereareseveralwaystodeterminethe positionandvelocityofaGNSSreceiverbasedonthesignalsitreceivesfrom aGNSSconstellation.Threemainquantities,knownasGNSSobservables–pseudorange,carrierphase,andDopplershift–areusedinpositioningand thischaptertouchesuponeachofthem.EachGNSSobservableismodeled inastraightforwardfashion,whichmakesmathematicalanalysissimple,but inaccurate–atleastwithouterrorcorrection.Varioussourcesoferror,from atmospherictorelativisticeffects,contributesomeerrortoGNSSpositioning. Themostimportantoftheseeffects,aswellascommonmitigationtechniques, arediscussedinthischapter.Finally,aderivationofGNSSpositioningusing pseudorangeispresented,buildingupontheearlierconceptsinthechapter.
Theremainderofthebookisdedicatedtoanin-depthdiscussionofatmosphericeffectsonthepropagationofelectromagneticwavestransmittedbyGNSS satellites.Inordertoprovideastrongconceptualfoundationforthepropagation phenomenabeingdiscussed,theauthorshavemadeanefforttoprovidedetailed derivationswheneverpossible.Fromthismoregeneralstandpoint,therelative importanceofeachparticularpropagationphenomenontoGNSSpositioning becomesclear.
ThefirstofthesechaptersisChapter3,whichdiscussespropagationeffects inthetroposphere,thelowestregionoftheatmospherethatiscomprisedof non-ionizedparticles.Inthisregion,therefractivityisthemainparameterof interestsinceitdeterminesthemagnitudeofasignal’sgroupdelay.Groupdelay isthelargestcontributortotroposphericerrorinGNSSpositioning,andseveral predictivemodelshavebeendevelopedtooffsetthiserror.Twoofthesemodels–theSaastamoinenmodelandtheHopfieldmodel–arecoveredinChapter4. TheremainingsectionsofChapter3discussothertroposphericpropagation phenomenasuchasscattering,absorption,andscintillations,whilethefinal sectionofChapter4discussestheUSStandardAtmosphere,ageneralreference modelforcharacteristicsofthenon-ionizedatmosphere,suchastemperature anddensitiesofvariousmolecularspecies.
Chapters5–8discusstheionosphere:upperlayersoftheatmospherewhere moleculeshavebeenionized,creatingaplasmathatinducesavarietyofpropagationeffectsonelectromagneticsignals.Thestructureanddynamicsofthe ionosphereitselfarequitecomplex,andthesecomplexitiesareoftennecessaryto understandinordertodiscussionosphericpropagation.ThereforeChapters5and 6arededicatedtoadetaileddiscussionoftheionosphere’sstructuralproperties, includingthemechanismswhichdriveionizationandplasmatransport,its morphology,andanumberofanomaliesthatrepresentdeviationsfromthe simplestmathematicalmodelsusedtounderstandtheionosphere.
Chapter7buildsuponthesetopicstoexploreionosphericpropagation.The Earth’smagneticfieldcausestheionospheretobehavelikeananisotropic medium,givingrisetoanumberofpropagationeffectssuchasgroupdelay, dispersion,andFaradayrotation.Theseeffectsarealldependentonthetotal electroncontent(TEC)alongasignal’spropagationpath,andsincetheSunis theprimarydriverofionizationintheatmosphere,theseeffectsexhibitstrong geographicalvariationsanddiurnal,seasonal,andsolar-cycleperiodicities.The diurnalchangesareofparticularimportance,sincetherecombinationofions andfreeelectronsshortlyaftersundowngivesrisetostrongfluctuationsinTEC, whichcauseionosphericscintillationsthatcanleadtoGNSSsignaloutages.
Finally,Chapter8presentsafewofthemajormodelsusedtoquantifyandforecasttheionosphericpropagationeffectspresentedinChapter7.Justasinthe troposphere,thegroupdelayintroducedintothesignalbytheionosphereisa
Preface xiii
majorsourceoferrorinGNSSpositioning.Chapter8discussestwoprominent predictivemodels,theKlobucharmodelandNeQuick,whichcanbeusedtomitigatetheeffectofionosphericdelay.Laterinthechapter,theGlobalIonospheric ScintillationModel(GISM)isbrieflycovered,whichaimstopredicttheseverityof ionosphericscintillations.Inaddition,thischapterprovidesanin-depthoverview oftheInternationalReferenceIonosphere,ageneralreferencemodelforcharacteristicsoftheionospheresuchaselectrondensity,electronandiontemperatures, andioncomposition.
Thisbookisaimedatthelevelofagraduatestudentoranadvancedundergraduatestudent.Asprerequisites,thereaderisexpectedtohaveamathematical backgroundtypicalofanundergraduateengineeringorphysicsprogram.Inaddition,someexposuretoelectrodynamicsatthelevelofGriffiths[1]isexpected. AppendixAcontainsareviewofrelevanttopicsinelectrodynamics,andAppendix Bprovidesfurtherexplorationofconceptsthatwillbereferencedinthisbook,but arenottypicallypartofafirstcourseinelectrodynamics.
31March2022
TimothyH.Kindervatter SciTec,Inc.,Princeton,NJ,USA FernandoL.Teixeira
TheOhioStateUniversity,Columbus,OH,USA
OverviewoftheGlobalPositioningSystem
1.1Introduction
Aglobalnavigationsatellitesystem(GNSS)isacomplexglobalnetworkconsisting ofthreesegments:thespacesegment(satelliteconstellation),thecontrolsegment (ground-basedtrackingstations),andtheusersegment(receiverequipment).The purposeofsuchasystemistoobtainhighlyaccuratepositioninginformationofa receiveronthesurfaceoftheEarth.
Thesystemoperatesviatheuseofaconstellationofsatellites.Thesesatellites orbitinaconfigurationsuchthatseveralofthemarevisiblefromanypointon Earthatanygiventime.Eachsatellitecontinuouslytransmitsacodedsignal, whichincludesinformationthatuniquelyidentifiesthetransmittingsatelliteas wellasitslocationinspace.AreceiveronthesurfaceoftheEarthmaypickupone ofthesesignalsanduseittodeterminethedistancebetweenitscorresponding satelliteandthereceiver.Sinceanelectromagneticsignaltravelsalmostexactly atthespeedoflight, c,throughEarth’satmosphere,itispossibletocalculatethis distancebysimplymultiplyingthetimebetweentransmissionandreceptionby c Usingmultiplesignalssimultaneously,thereceivermaytrilaterateitsposition bydeterminingthe x , y,and z coordinatesofitslocationonthesurfaceofthe Earth.Intheory,onlythreesatellitesareneededtodetermineareceiver’sposition,sinceweappeartohaveonlythreeunknowns: x , y,and z.However,theclock inthereceiverthatisusedtodeterminethetimeofreceptionisnotsynchronizedtothesatelliteclocks.Sincethedistancecalculationisdependentonthe signal’straveltime,anyerrorinthetimestampatthemomentofreceptionwill translatetoanerrorinthecalculateddistanceaswell.Thisreceiverclockerroris afourthunknowninoursystemofequations,soweactuallyneedafourthsatellite todetermineoursolution.Amorerigorousmathematicalanalysisofthisprocess willbeexploredinSection2.4.
SeveralindependentGNSSnetworksarecurrentlyinoperation,includingthe UnitedStates’GlobalPositioningSystem(GPS),Russia’sGlobalnayaNavigazionnayaSputnikovayaSistema(GLONASS),andtheEuropeanUnion’sGalileo. Severalregionalnavigationsatellitesystemsarealsocurrentlyoperational, suchasChina’sBeiDou(plannedtobeexpandedtoaglobalnetwork),India’s NavigationwithIndianConstellation(NAVIC),andJapan’sQuasi-ZenithSatellite System(QZSS).
Sinceitsinception,GNSShasbecomeaubiquitoustechnologywithfar-reaching applications.Amongotherthings,GNSShasbeenappliedtonavigation,surveying andmapping,precisionagriculture,logisticalsupplychainmanagement,weather prediction,emergencyandreliefservices,seismology,andevenfacilitationof stocktrades.AbriefdiscussionofsomeapplicationsispresentedinSection1.2. ItisclearthatGNSShasplayedasignificantroleinshapingthemodernworld, andwilllikelycontinuetoexpandinutilityasfurtherimprovementsaremade andnewapplicationsaredevised.
MaintenanceandimprovementofGNSSisatremendousglobalendeavor, resultingfromthecollaborationofnumerousscientistsandengineersindisparatefields,includingaerospaceengineering,electricalengineering,astronomy, electromagnetics,andgeophysics.Asahighlymultidisciplinaryfieldofstudy,the literatureonGNSSiscorrespondinglybroad.Itisinfeasibleforanindividualtobe anexpertineveryfacetofGNSS,andonemayfindtheliteratureofaneighboring fieldimpenetrablewithoutatleastacursoryunderstandingofitsfundamental concepts.
Theprimaryfocusofthisbookistheatmosphericeffectsontheradiowave signalsusedbyGNSS.InordertoappreciatethechallengesposedtoGNSS positioningbyatmosphericpropagationeffects,abasicunderstandingofGNSS fundamentalsisnecessary.Tothatend,thischapterandChapter2aimtoprovide anoverviewofimportantconcepts,manyofwhichwillbereferencedthroughout theremainderofthisbook.
Thischapter’sfocusisaconcreteexampleofanexistingGNSSsystem:the UnitedStates’GPS.Inparticular,thesystem-leveldesignandlogisticsofoperating theGPSservicewillbecovered.Althoughtheimplementationdetailsofeach GNSSdiffer,thebroaddesignconsiderationsrelevanttoGPSaretypicalandso serveasasuitableexampleforGNSSdesigningeneral.Section1.3discusses thethreemajorsubsystemsofGPS,alsoknownasGPSsegments.Theyarethe spacesegment(theconstellationofsatellitevehicles),thecontrolsegment(a networkofgroundstationsformonitoringandcontrol),andtheusersegment (receiverswhichdecodeGPSsignaldataandprovideservicessuchaspositioning andtiming).
Section1.4brieflyintroducestheterminologyrelatedtotheKeplerianorbits (atypeoftrajectorythatincludesGPSsatelliteorbits).Thisisrelevantwhen
discussingsatelliteephemerisdata,whichisinformationencodedintoaGPS signalregardingcurrentandpredictedtrajectoriesofsatellitesintheconstellation. Ephemerisdataispartoftheso-calledNavigationMessage,whichisdiscussedin Section1.5alongsideotheraspectsoftheGPScommunicationsubsystemsuchas broadcastfrequencies,modulationscheme,andrangingcodes.
1.2ApplicationsofGNSS
TheapplicationsofGNSSaremultitudinousandvaried,andoverthelastfew decadesnumerousindustrieshaveseentremendousinnovationbyleveragingthe positioningandtiminginformationGNSSprovides[2].
1.2.1ApplicationsofStandardGNSSPositioning
OneofthemostcommonusesofGNSSisfornavigation.Theaveragepersonis nodoubtfamiliarwiththeutilizationofGNSSfordrivingdirections,butthere aremanyothernavigationapplicationsaswell.Forexample,aviationhasbeen dramaticallyimprovedbyGNSS.Accuratepositioninginformationallowsfor safertakeoffsandlandingsbyprovidingairtrafficcontrollerswithreal-time informationonthelocationsofmultipleaircraft.Pilotsmayalsousepositioning informationtolandinremotelocationswithlimitedground-basedservices,such asamedicalevacuationhelicopterattemptingtorescuepeoplefromamountain. GNSShasalsobeenusedtooptimizeflightroutes,reducingtraveltime,and costs.Analogousmarineapplicationshavealsobeensought,providingefficient routesforshipsandensuringsafearrivalanddepartureatports.GNSSmayeven beusedtoaidspacecraftlaunch,andishelpfulformonitoringtheorbitsofother space-basedvehiclessuchastelecommunicationsatellites.
AnothermajorapplicationofGNSSissurveyingandmapping.Quicklyand readilyavailablepositioninginformationhasallowedsurveyorstomodeltheEarth toanunprecedenteddegreeofaccuracyandcompleteness.Priortotheadventof GNSS,surveyingtechniquesrequiredalineofsightfromagroundstationtothe receiver,limitingtheirfunctionalitytoareaswithgoodvantagepoints(suchas hilltopsormountains),orwideopenareasfreeofobstructions(suchasplains). Conversely,aslongasaGNSSreceiverhasagoodviewofthesky,itisableto communicatewithsatellitestodetermineitsposition.Thisexpandedfunctionality allowssurveyorstomapmanymoreareas,suchasvalleys,citieswithtallbuildings,andevencoastalareaswithlimitedaccesstoland-basedreferencestations.
GNSShasevenaidedinmappingtheoceanfloor,thoughindirectly.Ships utilizeGNSSinformationtodeterminetheirlocationonthesurfaceofthe ocean,andsonarisusedtomapthelocaltopographyoftheoceanfloorandany
submersedstructures.Thisinformationistremendouslyimportantformariners, asitcanalertthemtothelocationofshoalsorhazardousobstaclesthatmustbe avoided.Additionally,underwaterconstructionprojectssuchasbridgepiersor oilrigsrelyheavilyonGNSS.
1.2.2ApplicationsofCentimeterandMillimeter-LevelPositioning Accuracy
AsingleGNSSreceiverisabletodetermineitslocationonthesurfaceofthe Earthtoanaccuracyoflessthan10m.Throughtheuseofdifferentialpositioning orreal-timekinematic(RTK)positioning,inconjunctionwitherrorcorrection techniques,itispossibletoachievecentimeterorevenmillimeter-levelaccuracy. SourcesoferroraswellasmitigationtechniqueswillbediscussedinChapter2.
Centimeter-levelaccuracyhasallowedfarmerstoemployprecisionagriculture,inwhichentirefieldsofcropsmaybeplanted,watered,andharvestedby autonomousvehicles.Additionally,thislevelofaccuracyallowsforbettercontrol ofpesticide,herbicide,andfertilizerdissemination,producingahighercropyield forthefarmeraswellasmitigatingdamagetotheenvironment.
Constructionhasalsoseenanincreaseinautomationfromcentimeter-level GNSSpositioning.Autonomousvehiclesareabletobulldozeorgradeanareato specifieddimensions,orlaydownconcretesuchasforcurbsorsidewalks.This levelofautomationreducestime,cost,andthenumberofworkersrequiredto completeaconstructionproject.
Self-drivingcarswouldalsobeinfeasiblewithoutcentimeter-accurateGNSS. Thesepositioningmeasurements,inconjunctionwithlightdetectionandranging (LIDAR)andvarioussensorsdeployedthroughoutthevehicle,providethevehicle withadetailedpictureofitslocationandsurroundings,allowingittonavigate efficientlyandsafelyontheroad.
Forsomeapplications,evencentimeter-levelaccuracymaynotbesufficient. Forexample,measurementstationscanbeusedtodeterminetectonicdrift.However,tectonicplatesdriftveryslowly–ontheorderofmillimetersperyear[3]. Inordertoaccuratelydeterminethisdrift,GNSS-basedmeasurementstationsutilizenumerouscorrectiontechniquestoremoveasmanysourcesoferroraspossibleandmeasuretheirlocationtowithinamillimeter.
1.2.3ApplicationsofGNSSTimingInformation
Aswewillseelaterinthischapter,theoperationofGNSSisdependenton extremelyprecisetiminginformation.Toachievethis,eachsatellitehasanatomic clockonboardwhichtimestampseverysignalupontransmission.Inaddition toitsintendeduseforpositioning,asidebenefitofGNSSisthattheseatomic
clocksprovideavaluablereferencetimewhichmaybeusedfortimingand synchronizationinanumberofapplications.
NationallaboratoriesacrosstheworlduseGNSStiminginformationasa referenceinordertoestablishagloballyagreed-uponstandardtimecalledthe CoordinatedUniversalTime(abbreviatedUTC).Thisstandardfacilitatestravel andcommerceonaglobalscale,ensuringthatflightschedulesarenotconfused byconflictingtiminginformation,andallowingbanksandcorporationstokeep consistentrecordsoftransactions.Thestockmarkethasbecomeincreasingly automated,andcomputersareabletomaketradesontimescalesofmicroseconds orevennanoseconds.GNSStimingisstandardforallstocktradingnow,toensure thatthesedealsgothroughproperly.
TelecommunicationnetworksutilizeGNSStimingtosynchronizebasestations, efficientlyallocatebandwidth,andallowuserstotuneradiostationswithminimal delay.Powergridsrequireprecisesynchronizationtoensurethatgeographically separatedgeneratorsallruninphase.Distributedsensornetworksmayalsobe synchronized;forexample,seismicmonitoringnetworkscanbeusedtoquickly determinetheepicenterofanearthquakeandprovideforewarningfornaturaldisastersliketsunamis.Similarly,anetworkofdopplerradarsacrosstheUnitedStates aresynchronizedtoallowpredictionandreportingofhazardousweathersuchas tornadoesandhurricanes.
ThebroadanddiverseapplicationsofGNSShavecementedthetechnologyas aubiquitousandfundamentalaspectofmodernsociety,andthemotivationto understandandimprovethistechnologyisclear.
1.3GPSSegments
MuchoftheinformationinthissectionisadaptedfromChapter3of[4]andthe descriptionsoftheGPSsegmentsavailablefrom[2].
1.3.1SpaceSegment
ThespacesegmentoftheGPSconsistsofaconstellationofsatellitesorbitingthe Earthinaspecificpattern.ThisconstellationiscontinuouslymaintainedandfrequentlyupgradedbytheUnitedStatesAirForce(USAF).Theconstellationis comprisedofsixorbitalplanes,eachwithaninclinationangleof55∘ withrespect totheequator.Eachoftheseorbitalplaneswillcontainaminimumoffouroperationalsatellitesatanygiventime.Thesesatellitesarepositionedsuchthatthere arebetween4and10satellitesvisiblefromanypointonEarthatanygiventime. SincefoursatellitesarerequiredtotrilaterateapositiononEarth,thisensures thatareceiveranywhereonEarthwillbeabletodetermineitsposition.Ifmore
thanfoursatellitesareavailable,thereceivermaychoosethebestfoursignalsto improvetheaccuracyofthepositioncalculation.
TheUSAFworkstoensurethatthisbaselineconstellationhasatleast24satellitesoperating95%ofthetime.Thesixorbitalplanesalsohaveadditionalslotsfor extrasatelliteswhicharenotnecessaryforthesystem’soperationbutmayincrease performanceoractasbackupsinthecaseofacoresatellite’sfailure.InJune2011, theAirForceexpandedthebaselineconstellationfrom24to27satellitevehicles, increasingcoverage.Atthetimeofthiswriting,thereareatotalof31satellitesconsideredpartoftheGPSconstellation:27whichcomprisethebaselineconstellation and4additionalvehicles.
TheentireconstellationorbitsinamediumEarthorbit(MEO)atanaltitude ofapproximately20,200km.Theseorbitsareverynearlycircular,havingan eccentricityof0.02.Theorbitalperiodishalfofonesiderealday(approximately 11hoursand58minutes).Thevehiclesthatcomprisetheconstellationarecontinuallyphasedoutandreplacedbyimproveddesignswithadditionalcapabilities, increasedlifespans,andimprovedperformance.Asummaryofthedifferent generationsofsatellitehardwareisshowninTable1.1,whichhasbeenadapted frominformationprovidedin[2].
NavigationPayload
ThenavigationpayloadisacollectionofsubsystemscontainedineveryGPSsatellite.Thesesubsystemsareresponsibleforthegenerationandtransmissionofthe positioningsignalsutilizedbytheusersegment.Figure1.1showsablockdiagram ofthenavigationpayload.
EveryGPSsatellitetransmitsanL-band(seeTable1.2)downlinkthatisutilized fortrilaterationbytheusersegment.Thecontrolsegmentalsousesthesesignals tomonitorthesatelliteconstellationandensurethatitistransmittingproperly.All generationsofsatellitehardwaretransmitsignalsontheL1andL2carrierfrequencies,andmorerecenthardwarerevisions(BlockIIFandnewer)alsotransmiton theL5carrierfrequency.BlockIIIsatellitesaredesignedwiththeabilitytotransmitontheL1Ccarrierfrequency,buthavenotyetbegunbroadcastingthissignal. TheexactstructureandcontentofthesesignalsisessentialtoGPSoperation,so Section1.5coversthisinformationingreaterdetail.
Tracking,telemetry,andcontrol(TT&C)isaccomplishedbyanS-banduplink fromthecontrolsegment.Adedicatedsubsystemisresponsibleforreceiving TT&Cdataandmanagingfunctionssuchasorbitcorrection.Aseparateultra-high frequency(UHF)-band(seeTable1.3)crosslinksubsystemallowssatellitesto communicatewithothersintheconstellation.Therefore,ifasatelliteisunable tocommunicatewiththecontrolsegment,itmaystillreceiveimportantdata updatesfromneighboringsatellites.AllcurrentGPSsatellitesalsohavetheability toperformautonomousnavigationviacrosslinkranging,afunctionknownas
Table1.1 OverviewofcurrentandplannedGPSsatelliteblocks.
BlockIIRsatellites
8operational
C/AcodeonL1
P(Y)codeonL1andL2
On-boardclockmonitoring
AutoNavallowsautonomousoperationfor180days
7.5yeardesignlifespan
Firstlaunchedin1997
BlockIIR-Msatellites
7operational
AllBlockIIRsignalsandfeatures
SecondcivilsignalonL2(L2C)
Newmilitarycode(M-code)onL1andL2;providesenhancedjamresistance
7.5yeardesignlifespan
Firstlaunchedin2005
BlockIIFsatellites
12operational
AllBlockIIR-Msignalsandfeatures
ThirdcivilsignalonL5(L5)
Advancedatomicclocks
Improvedaccuracy,signalstrength,andquality
12yeardesignlifespan
Firstlaunchedin2010
BlockIIIsatellites
4operational,moreinproductiona)
AllBlockIIFsignalsandfeatures
FourthcivilsignalonL1(L1C)
Enhancedsignalreliability,integrity,andaccuracy
Noselectiveavailability
IIIFsatellitesequippedwithlaserretroreflectors
15yeardesignlifespan
a)Upto32satellitesareplanned,splitamongtwoseries:10BlockIIIAvehicles andupto22BlockIIIFvehicles.Asofthiswriting,4ofthe10BlockIIIA vehicleshavebeenlaunched,andtheremaining6areexpectedtolaunchinthe nextfewyears,withthetenthandfinallaunchprojectedfor2023.TheBlockIIIF vehiclesareexpectedtolaunchbeginningin2026andcontinuethrough2034. Source:BasedonGPS.gov[2].
Figure1.1 Blockdiagramofnavigationpayload.
Table1.2 IEEEfrequencybanddesignations.
Source:BasedonIEEEStandardLetterDesignationsforRadar-FrequencyBands[6].
AutoNav.UplinkandcrosslinkdataishandledbytheNavigationDataUnit’s (NDU)processor.
SincetimingisanessentialfactorinproperGPSoperation,eachsatelliteisalso equippedwithmultipleonboardatomicclocks.Onlyoneoftheseclocksoperates atagiventime;theremainingclocksareredundantsystemsincludedtoensure consistentsystemoperationinthecaseofthemainclock’sfailure.Theseclocksuse eitherRubidium(Rb)orCesium(Cs)andareverystable,makingthemveryreliableforlong-term,precisetiming.Rbclockstypicallydriftnomorethan10ns/day, andCsclocksdriftevenless:nomorethan1ns/day.
Atomicclocksoscillateatthenaturalresonantfrequencyoftheatomusedto buildtheclock(RborCs).BothofthesefrequenciesareontheorderofGHz,
Table1.3 ITUfrequencybanddesignations.
BandnameAbbreviationFrequencyrangeWavelengthrange
VerylowfrequencyVLF3–30kHz10–100km
LowfrequencyLF30–300kHz1–10km
MediumfrequencyMF300kHz–3MHz100m–1km
HighfrequencyHF3–30MHz10–100m
VeryhighfrequencyVHF30–300MHz1–10m
Ultra-highfrequencyUHF300MHz–3GHz0.1–1m
SuperhighfrequencySHF3–30GHz1–10cm
ExtremelyhighfrequencyEHF30–300GHz1–10mm
Source:BasedonITU-RV.431-8[5].
makingthemimpracticalformodulation.Aphase-lockedfrequencysynthesizer isusedtogeneratea10.23MHzfrequency,whichisthenpassedtotheNDU.Inthe NDU,theC/AandP(Y)rangingcodes(furtherdiscussedinSection1.5)aregeneratedandpassedtotheL-bandsubsystem.There,theyaremodulatedontothe L-bandcarrierfrequenciesfortransmission.
1.3.2ControlSegment
TheGPScontrolsegmentisagloballydistributednetworkofgroundstationsthat monitorsandcontrolsthesatelliteconstellation.Thecontrolsegmentiscomprised ofthreeelements:monitoringstations,groundantennastations,andthemaster controlstation(MCS).
MonitoringStations
Atthetimeofthiswriting,thecontrolsegmentincludes16monitoringstations[2] locatedinanumberoflocationsworldwide.SixareoperatedbytheAirForce,and theother10areunderthepurviewoftheNationalGeospatial-IntelligenceAgency (NGA).Thesestationsareequippedwithadual-frequencyreceiver,achoke-ring antennathatprovidesmultipathsignalrejection,twoon-sitecesiumclocks,and meteorologicalsensingequipment.
Eachstationcollectspseudorangeandcarrierphasemeasurementsfromsatellitesastheypassoverhead.Thereceiverthendecodesthesignaltoobtainthe navigationmessage,andforwardsallofthisinformationtotheMCSforprocessing. Additionally,eachstationutilizessensorstoobtainsurfacepressure,temperature, andhumiditymeasurementsthatareusedtodevelopmodelsofthetroposphere. WewilllaterseeinChapter4thatsuchmodelsmaybeusedtoestimateerrors
1OverviewoftheGlobalPositioningSystem
introducedbypropagationphenomenainthetroposphere.Themeteorological dataisalsosenttotheMCSforprocessing.
Whileusersegmentreceiversareentirelypassiveanddesignedonlytopickup signalsincompliancewiththeintendedspecifications,monitoringstationsmust beabletodetectnon-compliantsignalssothattheycanreporttheseabnormalities totheMCS.Tofacilitatethis,everymonitoringstationmaybecontrolledremotely bytheMCStoacquireandtracksignalsfromunhealthysatellites.
GroundAntennaStations
Asofthiswriting,therearecurrently11groundantennastations[2]includedin thecontrolsegmentnetwork.TheseS-bandantennasprovideTT&CforthesatellitesbasedoncommandsfromtheMCS.Thegroundantennasestablishcontrol sessionswithasinglesatelliteatatime,buttheMCSiscapableofcoordinating controlsessionsformultiplesatellitessimultaneouslyusingthevariousground antennas.
InadditiontoTT&C,groundantennastationsareresponsiblefortransmitting thenavigationmessagegeneratedbytheMCS.ThestationsalsosupportS-band ranging,whichallowstheMCStoquicklydetectandresolveorbitalanomalies.
MasterControlStation
TheMCSislocatedatSchrieverAirForceBaseinColoradoSprings,Colorado andisoperatedbytheUSAFSpaceCommand,SecondSpaceOperationSquadron (2SOPS).AbackupMCSinGaithersburg,Marylandprovidesredundancyinthe system.TheMCSisresponsibleforanumberoftasks,including:
● Monitoringthelocationandhealthstatusofsatellites.
● Computingestimatedsatelliteclockandephemerisparameters.
● SynchronizingGPStimetoUTC.
● Generatinganduploadingthenavigationmessage.
● Monitoringintegrityofnavigationmessage.
● Verifyingandloggingnavigationdatasuppliedtousersegment.
● Maneuveringandrepositioningsatellitestocorrectorbitalanomaliesorrestructureconstellationincaseofsatellitefailure.
TheprimaryfunctionoftheMCSistocreatethenavigationmessage(discussed indetailinSection1.5)andtransmitittothesatelliteconstellation.Thereareseveralstepsinvolvedinthisprocess.
Thecontrolsegment’smonitoringstationsreceivesignalstransmittedbyGPS satellitesandareabletocalculatethebasicGPSobservables,pseudorange,andcarrierphase,bydemodulatingtheencodedinformation.Thisinformationincludes thelocationofeachsatellite,thetimingoftheironboardclocks,andthehealth ofeachvehicle.AllofthisdataissenttotheMCS,whereitisorganizedand processed.
TheMCSusesaKalmanfilter[4,p.89]to“smooth”therawmeasureddata andproducepreciseestimatesofthesatelliteephemeris.Eachsatellite’smotion ismodeledand,inconjunctionwiththesmoothedephemerisdata,areference trajectoryiscomputedforeachsatellite.Thisreferencetrajectoryformsthebasis fortheephemerisparametersincludedinthenavigationmessage.
Inordertoensuresynchronizationamongallthesatellitesintheconstellation, theMCSmustmaintainacoherenttimescaleasareference.Sinceapseudorange measurementisderivedfromthetraveltimeofasignal,monitoringstationsare abletousethemeasuredpseudorangeofasatellitetoprovidethetiminginformationofeveryclockinthesatelliteconstellation.Usinganensembleofalltheclocks oneverysatelliteandeverymonitoringstation,theMCSsetsupacompositereferencetime,calledGPStime.Toretainconsistencywithotherglobaltimescales, GPStimeissteeredtoalignwithUTC.
Therawtimingdataprovidedbythemonitoringstationsissmoothedbya KalmanfilterandreferencedtoGPStimetoobtainparametersrepresenting thebias,drift,anddriftrateofeveryclockinthesatelliteconstellation.These parametersareincludedasclockcorrectiondatainthenavigationmessage.
Theprocessedephemerisandclockcorrectiondataforeachindividualsatellite,alongwithsomeotherinformation,iscompiledandencodedinthemanner describedinSection1.5.Eachsatellite’scompletenavigationmessageisbacked uplocally,matchedtothepropervehicle,andthentransmitted.Everymessageis updatedandre-sentseveraltimesperdaytoensurethatsatelliteshaveup-to-date information.
Toensurethatthenavigationmessageisdeliveredcorrectly,eachsatelliteis designedtorebroadcastthemessagetheyreceive.Thecontrolsegment’smonitoringstationsreceivetheserebroadcastedmessagesandforwardthemtotheMCS, wheretheyarecomparedwiththelocalcopies.Iftherearesignificantdifferences inanyofthereceivedmessages,analertissentto2SOPS,whichthenintervenes tomanuallycorrecttheproblem.
Finally,theMCSisabletoutilizethegroundantennastationstomanuallycontrolGPSsatellitevehicles.Inthecaseoforbitalanomaliesthatareunabletobe correctedautonomously,2SOPSmayactivelysteeravehiclebackintoitsproper orbit.Additionally,inthecaseofavehicle’sfailure,severalsatellitesmayneed toberepositionedtoensurefullcoverage.Usingmultiplegroundantennas,itis possibletosteerseveralsatellitessimultaneously.
1.3.3UserSegment
TheGPSusersegmentreferstoallreceiverscapableofreceivinganddecodingthe L-bandsignalstransmittedbytheGPSsatelliteconstellation.Receptionbythese receiversispassive,allowingforanunlimitednumberofusers.Manydifferent
typesofreceiversexistonthemarkettoday,boastingdifferentfeaturesintended forvariousapplications.Improvedfunctionalityandaccuracycomesatagreater price,sothepurchaserofaGPSreceivermustconsiderthecontextinwhichitwill beused.
Atthetimeofwriting,receiverswiththemostrudimentaryfunctionalityare availableforlessthan$50US.Ontheotherhand,high-endreceiversboasting centimeter-levelaccuracywillcostthousandsofUSdollars.Insomeapplications, lessaccuratepositioningmaybeacceptable,soaninexpensivereceiverisdesirable,whileapplicationswithmorestrictpositioningrequirementsrequiremore sophisticatedandexpensivehardware.
ReceiverDesignConsiderations
AnumberofconsiderationsmustbetakenintoaccountwhendesigningaGPS receiver.Forexample,somereceiversaredesignedtobeportable,sotheymust besmall,lightweight,andpotentiallysturdyenoughtowithstanddrops,shocks, vibrations,orotherphysicalimpact.Somereceiversareintendedforoutdoor applications,sotheymustbeabletowithstandinclementweather,aswellasthe temperatureandhumidityextremesofitsenvironment.Receiversformaritime applicationsmustalsotakeatmosphericsaltcontentandcorrosiveeffectsinto account.Receiversmountedonvehiclesmayalsoneedtotakeintoaccount velocityandacceleration.Forexample,areceivermountedonafighterjetwill needtowithstandmultipleGsofacceleration,andwillneedtoaccountforthe dopplershiftinducedbythejet’shighvelocityinordertoacquiresignalsproperly.
ThegeometryofthereceiverantennaisamajorfactorforaGPSreceiveraswell. Vehiclesdesignedtobeaerodynamicwillrequirelow-profileantennas,highgain antennasmaybeusedtoimprovesignalreception,phasedarraysallowfordigital beamsteeringandmultipathorinterferencerejection,andchokeringantennas greatlymitigatemultipatherrors.Theproperchoiceofantennaisparamountto thesuccessfuloperationofaGPSreceiver.
Theinternalsoftwareandfront-endhardwareofthereceiverplatformarealso animportantfacetofreceiverdesign.Auser-friendlyuserinterfaceisalwaysdesirable,butitisespeciallyimportantinthecaseofreceiverstargetedatthegeneral public,suchasGoogle’sMapsservice,orGarmin’sdashboardreceivermodules. Insomeapplications,GPSreceiverswillbeusedinconjunctionwithavarietyof othersensorstoaccomplishaspecifictask.Forexample,adroneusedforaerial imagingmayutilizeinertialmeasurementunits(IMUs),computervision,andGPS positioningsimultaneously,sotheGPSreceivermustbeabletocoordinatewith thesoftwarethatorchestratesthiscomplexprocess.
ThedesignparametersoutlinedherearebutafewofthemyriadchallengesfacingengineersdesigningGPSreceivers.AsGPStechnologycontinuestomature, theseeminglylimitlessapplicationswillintroducestillfurtherproblemstobe solved.
TypesofReceivers
Thereissignificantvariationinthefeaturesetsofreceiversonthemarkettoday. Feature-richdesignsaregenerallyaccompaniedbyahigherpricetag.Afewof themostimportantfeaturedistinctionsarethecarrierfrequenciesandcodes supported,thesatelliteconstellationsaccessibletothereceiver,andwhether thereceivercanutilizeaugmentationservicesorreferencenetworkstoimprove performance.
AllcurrentGPSsatellitesbroadcastL1andL2carrierfrequencies,whileBlock IIFsatellitesandfuturegenerationshavebeenupgradedtotransmittheL5carrier frequencyaswell.However,notallreceiversaredesignedtopickupallofthese signals.Infact,mostreceiversaresingle-frequency,andareonlytunedtopickup L1.Dual-frequencyreceiversaremoreexpensive,buttheyallowthereceiverto mitigatetheionosphericerrortermfromGPSpositioningmeasurements(these conceptswillbeexploredlaterinthisbook).Triple-frequencyreceiversprovide evenfurtheradvantagesoverdual-frequency,includingreductionofmultipath errorsandphaseambiguities.
Similarly,notallGPSreceiversaredesignedtomakeuseofallmodulationcodes. Somecodesareauthorizedforcivilianuse,whileothersaredesignedspecifically formilitaryapplications.Currently,therearethreeavailablecivilsignals:L1C/A, L2C,L5.Capabilityforafourthcivilsignal,L1C(nottobeconfusedwithL1C/A)is includedintheBlockIIIgenerationofsatellites,butatthetimeofthiswriting,the L1Csignalsarenotyetbeingbroadcast.AllGPSreceiversarecapableofreceiving L1C/A,andmulti-frequencyreceiversaredesignedtoreceiveL2CandL5aswell.
Thenon-civiliansignalscurrentlyinoperationaretheL1P(Y)codeandthe L2P(Y)code.Thesecodeswereintendedsolelyformilitaryapplications,andas suchareencryptedandnotdirectlyaccessibleforcommercialuse.However,many receivermanufacturershavedevelopedproprietarysolutionstoindirectlymeasurepseudorangeandcarrierphaseusingthesecodes.
ManymodernreceiversaredesignedtoreceivesignalsnotonlyfromtheGPS constellation,butalsotheotherGNSSconstellations(GLONASS,Galileo,and BeiDou).Utilizationofsatellitesfrommultipleconstellationsaffordsbenefits suchasimprovedavailability,increasedaccuracyandsystemintegrity,better dilutionofprecision(DOP),andimprovedrobustnessagainstspoofing.
Finally,receiversmayalsobedesignedtotakeadvantageofanumberofaugmentationsystemsandtechniquestoimproveaccuracy.Thetwomajorcategories ofaugmentationsystemsareSatelliteBasedAugmentationSystems(SBAS)and GroundBasedAugmentationSystems(GBAS).AnexampleofanSBASisJapan’s QZSS,whichisaregionalconstellationofsatellitesdesignedtoimprovesystem performance.AGBASisacollectionofgroundstationsthatreceiveGNSSsignals,performcorrections,andsendupdatedmeasurementstootherreceiversnear Earth’ssurface.Thisisveryusefulforperformingreal-timepositioningimprovementsforreceiversinrangeoftheGBAS.
Somereceiversaredesignedtomakeuseofanetworkofreferencestations toimprovetheirpositioningaccuracy.Commontechniquesincludedifferential globalnavigationsatellitesystem(DGNSS)–inwhichmeasurementsfromtwo ormorereceiversaredifferencedtoreduceerror–andPrecisePointPositioning (PPP)inwhichadditionaldatafromnearbyreferencestationsisforwardedtothe receiverinordertocalculateandremovesomesourcesoferror.
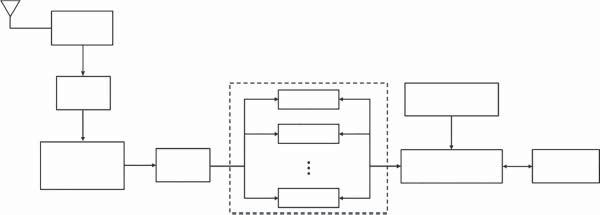
ReceiverBlockDiagram
Figure1.2showsasimplifiedblockdiagramofagenericGPSreceiver.
Uponreception,RFsignalsaresentthroughabandpassfiltertoremoveinterference.Afterthis,thesignalisboostedbyalow-noisepreamplifier.Atthispoint, thesignalisdownconvertedtoanintermediatefrequency(IF)andsubsequently sampledbyananalog-to-digitalconverter(ADC).TosatisfytheNyquistcriterion, thesamplingfrequencyoftheADCmustbeatleasttwicethechippingrateofthe encodedsignal.However,oversamplingreducesquantizationnoiseandincreases resolution,reducingthenumberofbitsrequiredintheADC,sosamplingfrequenciesupto20timesthechippingratearefrequentlyemployed.Thechippingrate ofL1C/Acodeis1.023MHz,andthechippingrateofbothL1P(Y)andL2P(Y)is 10.23MHz.
Thesampleddataisfedintoadigitalsignalprocessor(DSP)with N parallel channels.Theprocessorisolateseachsignalreceivedbyasatelliteandassignsit toachannel.Eachchannelcontinuouslytracksthesatelliteassignedtoit,meaningthatupto N satellitesmaybetrackedsimultaneously(typically N rangesfrom 8to12).Eachchannelhasloopstotrackandcalculatepseudorangeandcarrier phasemeasurements.Additionally,eachsignal’sencodednavigationmessageis demodulatedatthisstage.Allofthisinformationisthenforwardedtothenavigationprocessor.
Thenavigationprocessorusesthepseudorangeand/orcarrierphasemeasurementstodeterminepositioninginformation,asshowninSection2.4.Additional informationincludedinthenavigationmessage(andinthecaseofDGNSS/PPP,
Figure1.2 SimplifiedblockdiagramofaGPSreceiver.