Flow with corridor: A GAN-based floorplan generator
MASTER IN ADVANCED COMPUTATION FOR
ARCHITECTURE AND DESIGN
Thesis Studio
"Follow with corridor"
A GAN-based floor plan generator
MASTER IN ADVANCED COMPUTATION FOR ARCHITECTURE AND DESIGN
"Follow with corridor"
A GAN-based floor plan generator
Faculty: Oana Tau
ZIQI CUI
INDEX
1, Introduction
2, Literature Review
2.1 3D building volume generation method
2.2 Overview for 3D Generation Methodology
2.3 2D floor plan generation method
2.4 Overview for 2D Generation Methodology
3, Research Objective
3.1 Research Objective
3.2 How to embed the info
3.3 Methodology exploration
3.4 Limitation
3.5 Ideal outcome
4, Methodology
4.1 Pix2Pix Model
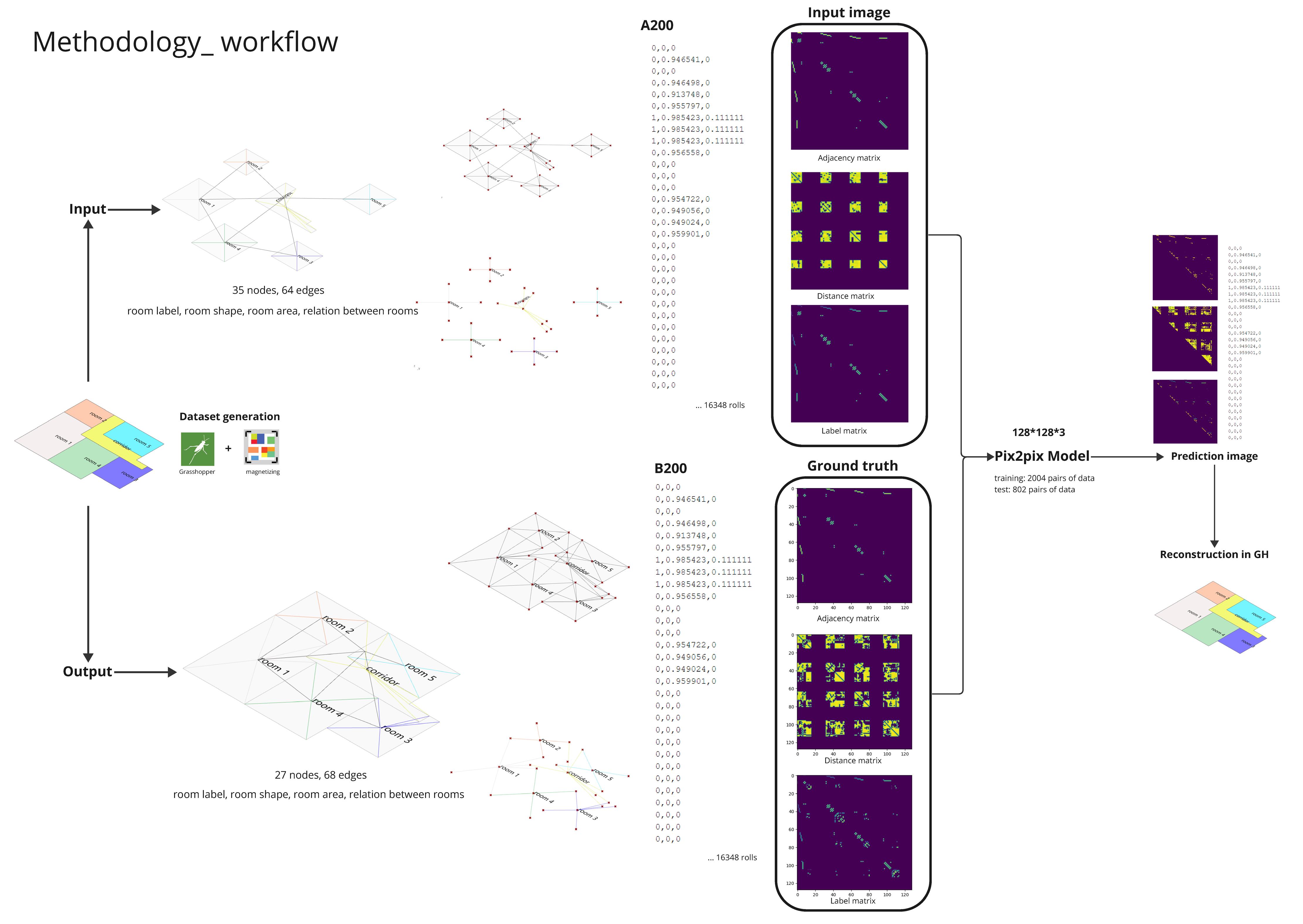
4.2 Workflow
5, Dataset Generation
5.1 Open dataset
5.2 Grasshopper Generate Dataset
5.3 Embed Feature
5.4 Got input dataset
5.5 User Input representation
5.6 Dataset Variation
6, Training
6.1 1st Training
6.2 Reconstruction Result
6.3 2nd Training
6.4 Reconstruction Result
7, Conclusion
7.1 Conclusions
7.2 Go back to 3D
7.3 Limitation
7.4 Potential & Future work
8, Reference
Abstract
Generative design has always been a very hot topic in recent times. Over the past few years, machine learning tools have emerged as invaluable aids in the creation of more precise and diverse 2D or 3D building models, fostering greater user engagement in the design process. A retrospective examination of previous approaches shows that techniques such as diffusion models, generative adversarial networks (GAN), graph neural networks (GNN) and etc. They all attempt to educate computer to understand the complexity of a building and reconstruct it.
This research will continue this topic and try to develop another method to let the ML understand, learn and reconstruct the information in the building plan to develop a generator. The training results allow users to customize the generation. In addition, it relies on the necessary circulation lines in the building (ie, corridor space) to generate a reasonable building plan. After verifying the possibility of this methodology, this study propose a feasible solution for subsequent generation of architectural 3D space.
#
01 Introduction
How the ML to understand spatial information?
Introduction
Generative design has garnered significant attention in recent years, captivating the design and architecture community with its potential to revolutionize the creative process. The emergence of machine learning tools has played a pivotal role in enhancing the precision and diversity of 2D and 3D building models, thus igniting greater enthusiasm and involvement from users in the design process. Reflecting on past approaches, it becomes evident that techniques like diffusion models, generative adversarial networks (GANs), graph neural networks (GNNs), and others have all aimed to equip computers with the capability to comprehend the intricacies of building structures and subsequently reconstruct them.
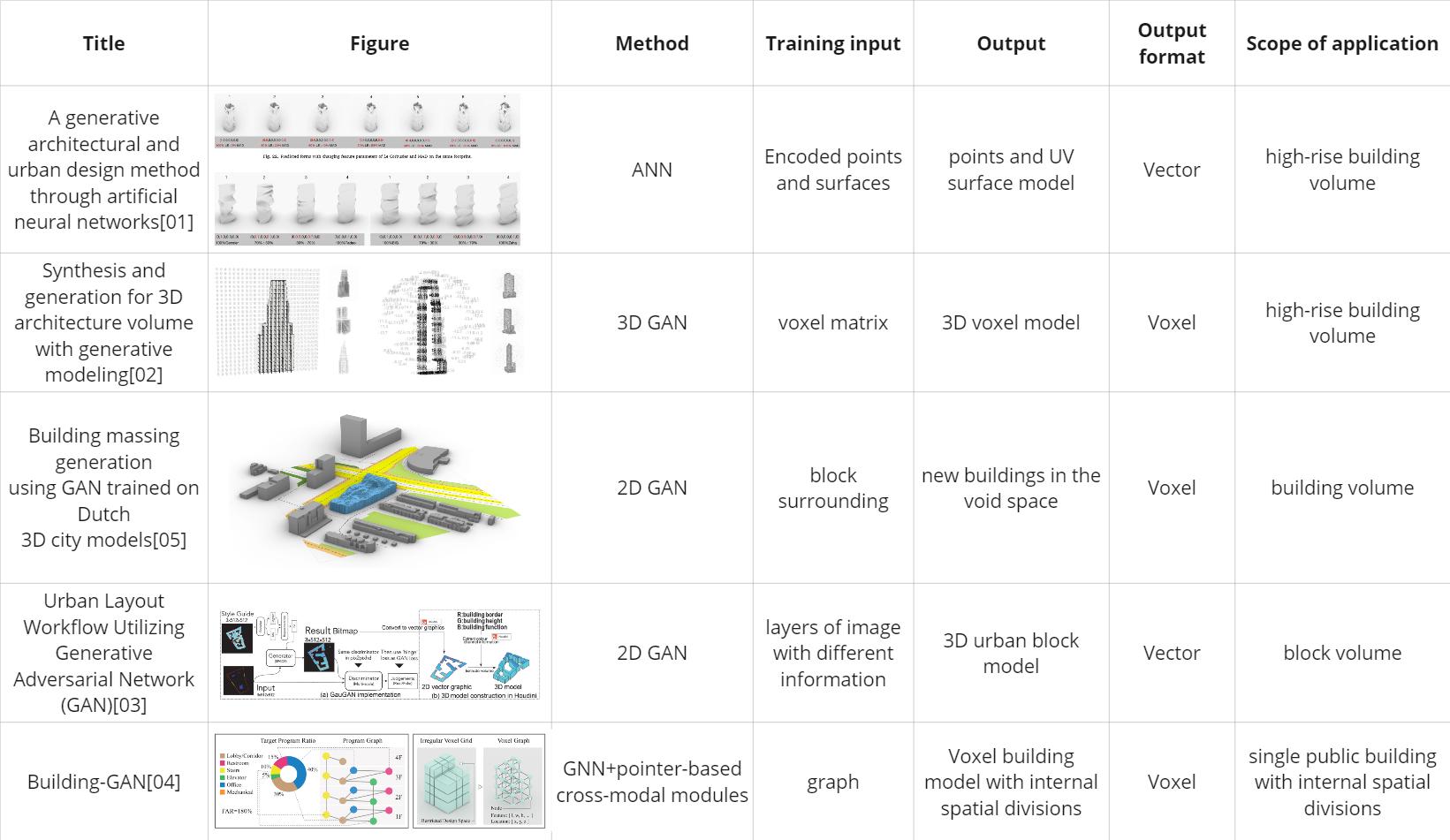
How to make a computer understand the logic of a building and regenerate similar buildings? Previous research can be roughly divided into two aspects, the generation of 3D building volumes and the generation of 2D building plans. The models that achieve this generation result are often based on GAN, 3DGAN, GNN, etc. The results obtained have certain limitations.
Due to the internal complexity of 3D building space, most generative models discussing the division of building space focus on the generation of 2D floor plans. A building plan can often also represent the general layout of a building. There are many ways to generate 2D. It can be a diffusion model, it can be a GAN, it can be a hybrid method of GNN and GAN, etc.
This research endeavor seeks to extend the discourse surrounding generative design by proposing an alternative approach that enables machine learning to not only grasp but also learn and reconstruct the nuanced information inherent in building plans, thereby empowering the development of a versatile generator. The training outcomes attained through this method will grant users the flexibility to tailor the generated designs to their specific requirements and preferences. Additionally, the methodology places a strong emphasis on ensuring the incorporation of essential circulation pathways within the building, such as corridors, in order to produce building plans that are both aesthetically pleasing and functionally viable.
Following the validation of the viability of this novel methodology, this study puts forward a practical solution for the subsequent generation of architectural 3D spaces. By bridging the gap between machine learning and architectural design, this research not only contributes to the evolution of generative design but also promises to reshape the way we conceive and construct buildings in the future.
Figure 02. ArchiGAN, a 2D floorplan generator.[01]
Figure 01. Generation for 3D skyscraper volume.[01]
# 02 Literature Review
Overview for 3D Generation Methodology
2.1 3D building volume generation method
A generative architectural and urban design method through artificial neural networks [01]
As an efficient tool, machine learning has been widely used in the field of 3D volume generation. Different from 3D voxelization generation, this paper attempts to find a vectorization method for 3D volume generation. It is hoped that ML can accurately capture the characteristics of the building's appearance and generate it.
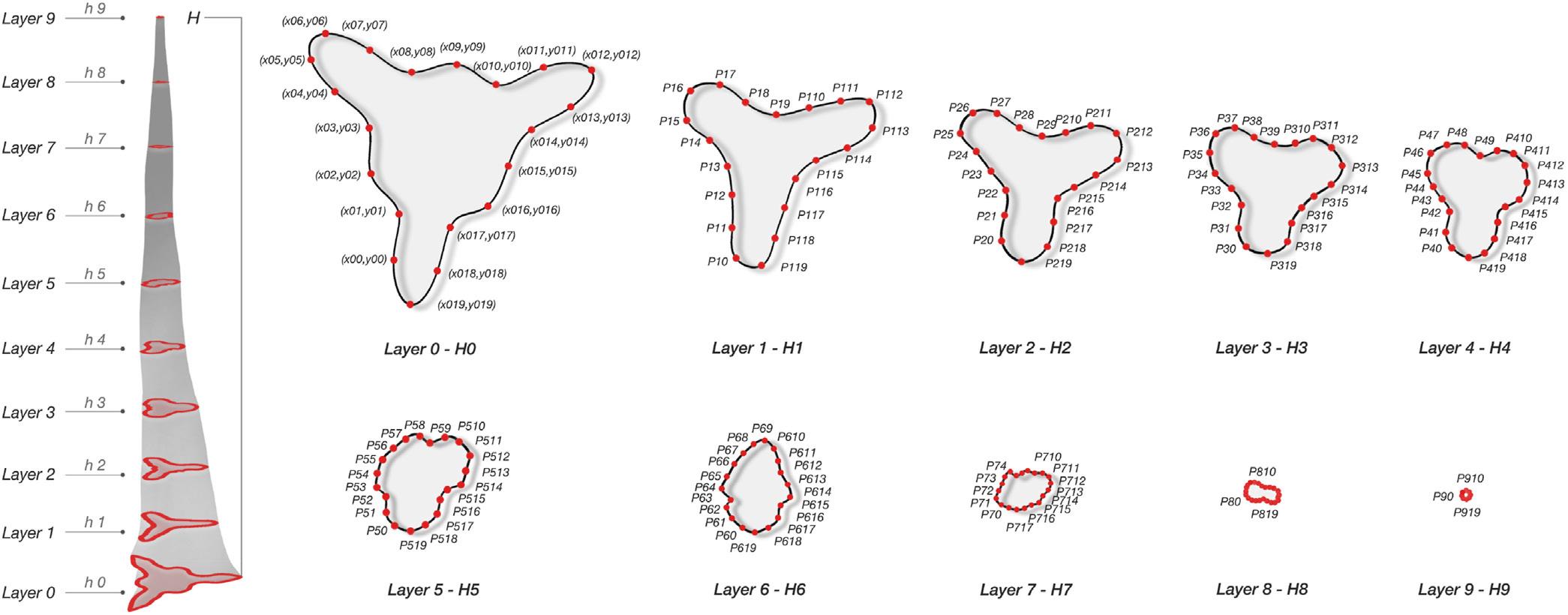
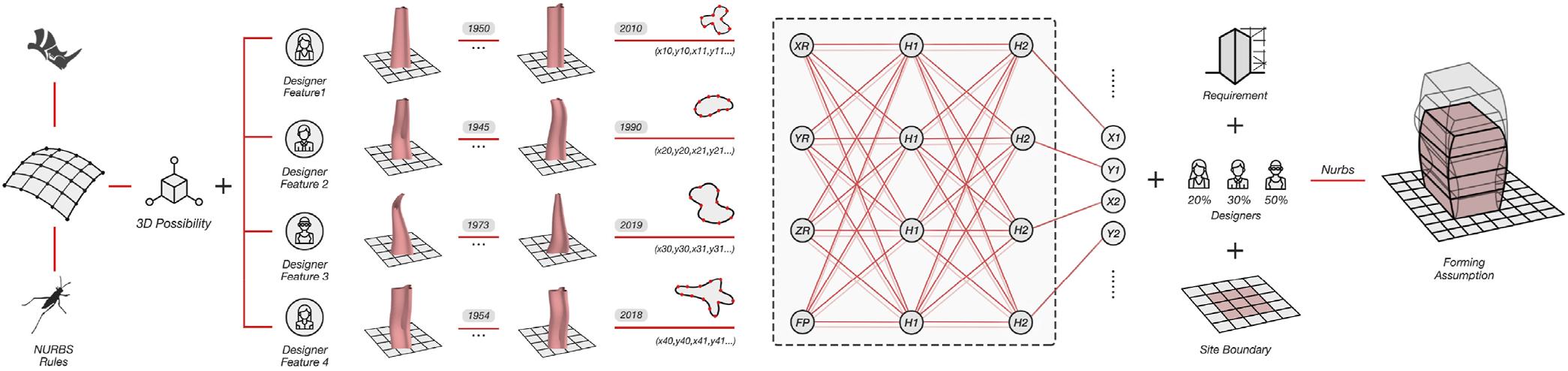
This study develops a specific artificial neural network, learning and generating design features for the forms of buildings. This article selects skyscrapers as the research object. The specific method is to divide the building into several slices evenly in the vertical direction, find the outline lines of these slices, and represent these curves in the form of points and polylines. Finally, these customized data structure with feature parameters are constructed, meeting the requirements of the neural network by rebuilding surfaces with controlling points and appending additional input neurons as quantified vectors to describe the properties of the design.
Furthermore, trained with design data collected from existing buildings, the neural network learns and infers the geometric design features of architectural design with different feature parameters, providing a data-driven method for designers to generate and analyze architectural forms.
Figure 04. Workflow of the training and generative design with different architects' design styles.[01]
Figure 03. Controlling points extraction process with 10 layers and 20 points for each layer.[01]
Hao Zheng, Philip F.Yuan
Synthesis and generation for 3D architecture volume with generative modeling [02]
This study proposed a workflow in the early design phase to synthesize and generate building morphology with artificial neural networks.
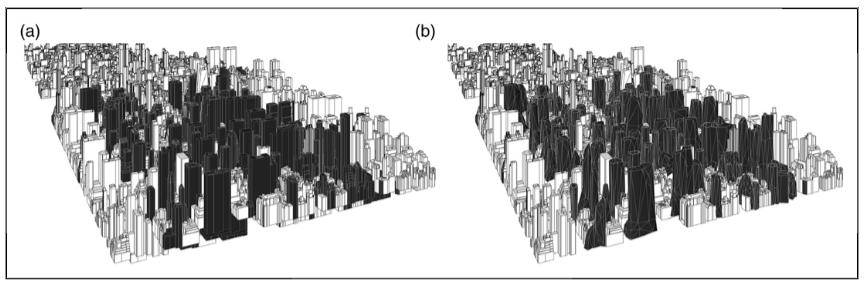
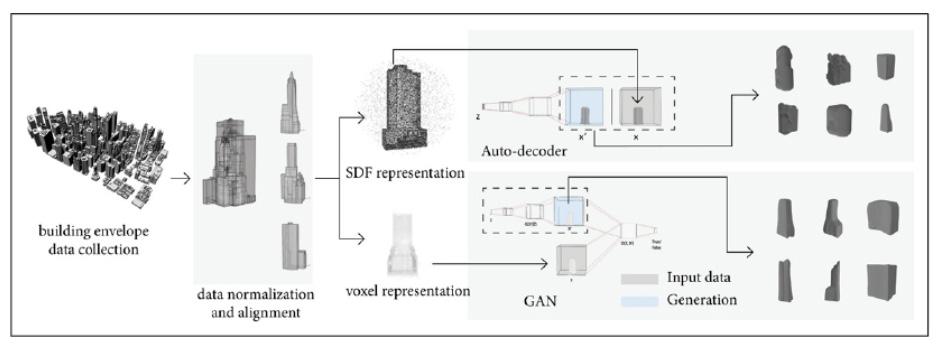
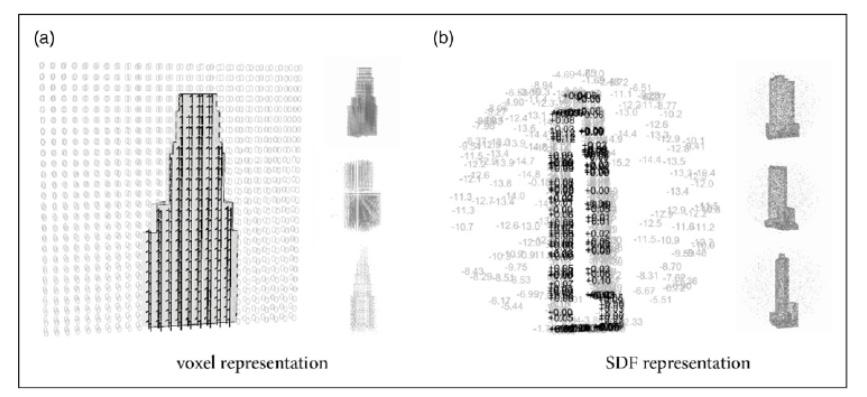
Taking 3D building models from the financial district of New York City as a case study The study uses a voxel approach to capture the characteristics of the building's form. By encoding whether the building has pixels in a specific area and the relative distance between the pixels and the outside of the field, the relative position and appearance characteristics of the building in this area are determined. In this way, the architectural 3D features are converted into a data form readable by ML for further learning.
This study use 3DGAN, which a short for Three-Dimensional Generative Adversarial Network, is a cutting-edge deep learning framework designed for the generation of three-dimensional (3D) objects and scenes. It extends the principles of Generative Adversarial Networks (GANs) into the realm of 3D space, allowing the generation of realistic 3D objects, environments, and textures.
The results of this study show that this method captures the appearance characteristics of the building well to a certain extent, but because it is a voxelization method, the generated result is not in vector format, making it difficult to edit in the next step. In addition, the voxelization results also have the problem of low resolution, making it difficult to capture the small features and differences between buildings.
Xinwei Zhuang, Yi Ju, Allen Yang, Luisa Caldas
Figure 07. Demonstration and examples of the preprocessed dataset.[02]
Figure 05: Proposed pipeline for 3D architectural volume generation.[02]
Figure 06.The generator of 3D generative adversarial networks.[02]
A Discussion on an Urban Layout Workflow Utilizing Generative Adversarial Network (GAN)
- With a focus on automatized labeling and dataset acquisition[03]
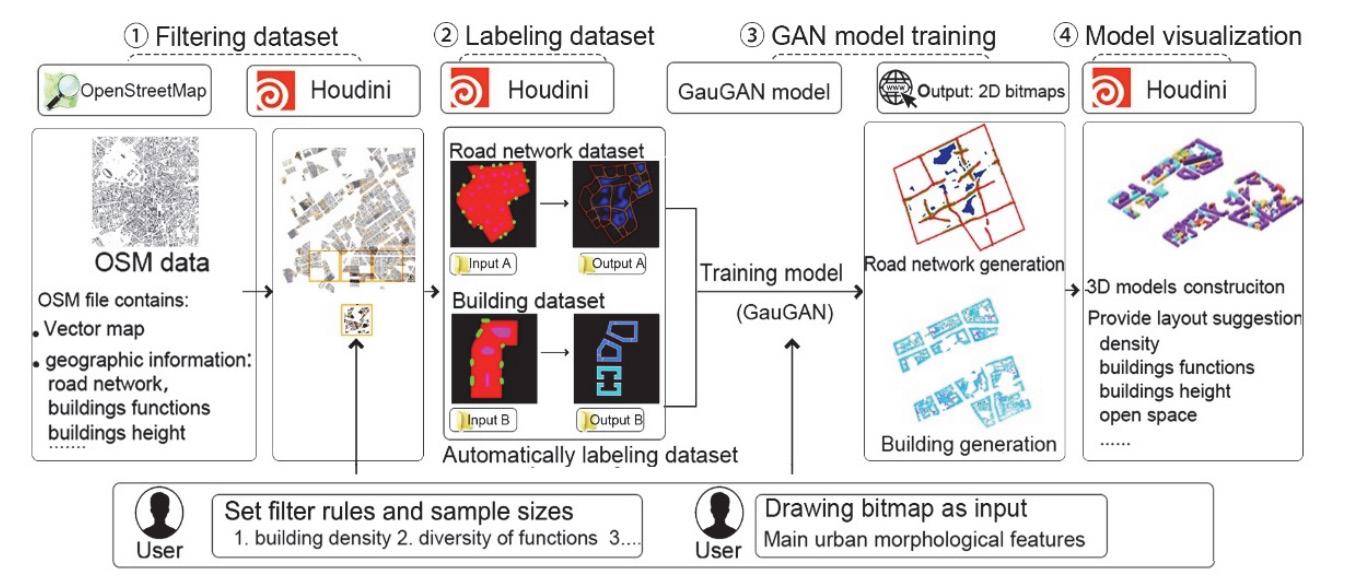
Deep Learning (DL) has recently gained widespread attention in the automation of urban layout processes. This study proposes a rule-based and Generative Adversarial Network (GAN) workflow to automatically select and label urban datasets to train customized GAN models for the generation of urban layout proposals. The developed workflow automatically collects and labels urban typology samples from open-source maps.
Furthermore, it controls the results of the GAN process with labels and provides real-time urban layout suggestions based on a co-design process. The conducted case study shows that the average value of the GAN results, trained from an automatically generated dataset, meets the site's requirements.
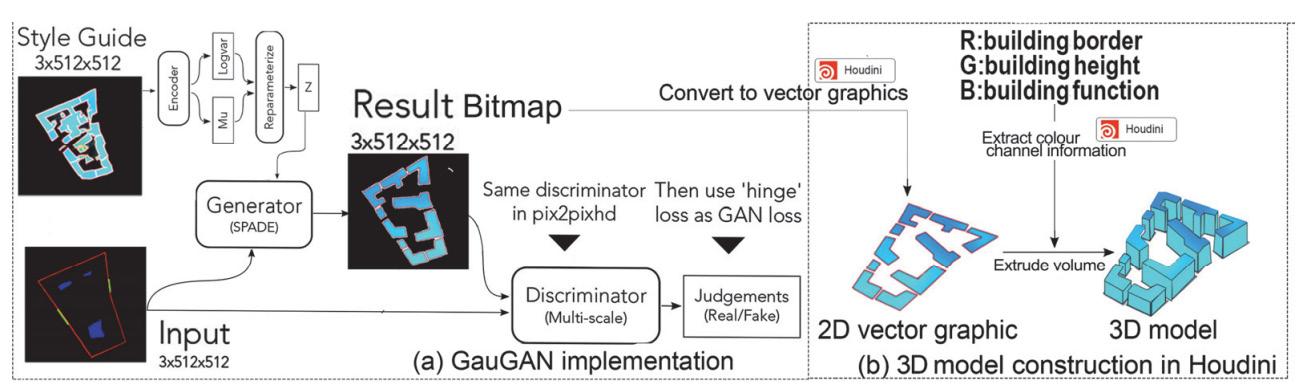
The specific method is to split the images available in 2dGAN into different channels, and embed each channel to form different information required for a building. When training is complete, this information can be translated again into a 3D building volume.
In general, this article is a way to achieve 3D volume generation through 2D GAN. The output result is vector, which is convenient for further editing.
In the past research, the generation of 3D volumes basically discussed the external characteristics of the building, and rarely explained the internal spatial logic of the building. This study made an attempt at dividing the internal space of the building.
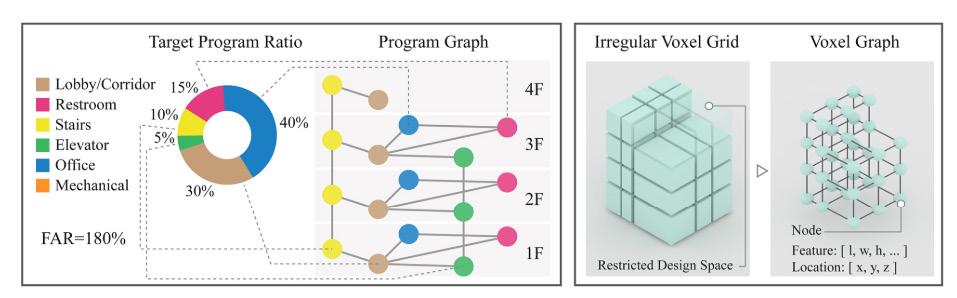
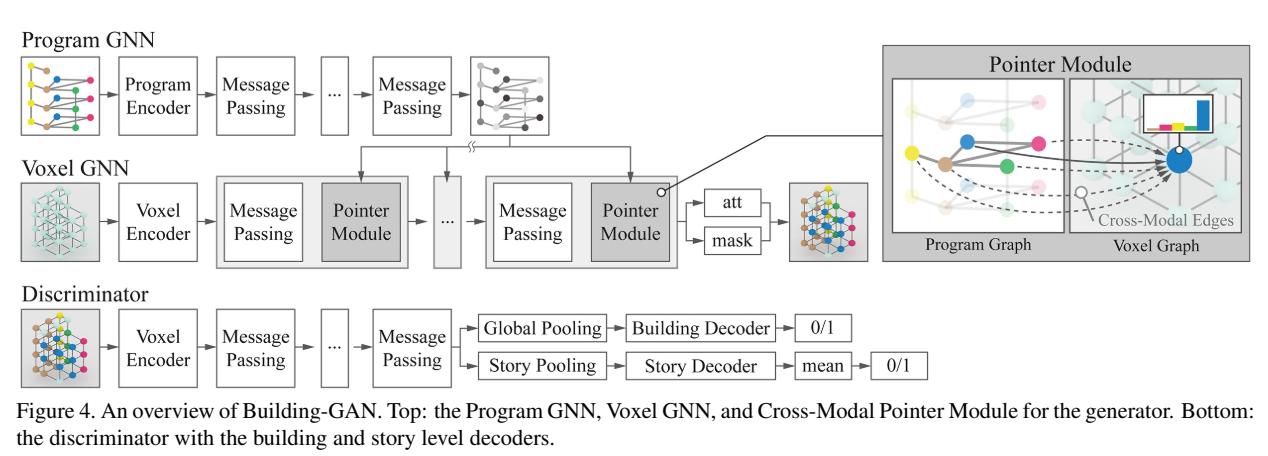
This paper focuses on volumetric design generation conditioned on an input program graph. Instead of outputting dense 3D voxels, we propose a new 3D representation named voxel graph that is both compact and expressive for building geometries. Our generator is a crossmodal graph neural network that uses a pointer mechanism to connect the input program graph and the output voxel graph, and the whole pipeline is trained using the adversarial framework.
Therefore, when we input the connection relationship of functional spaces between buildings, the output result is a 3D building volume with detailed spatial division.
However, it is worth noting that despite the internal division of space in this method, its output format is still a voxelized result, which is a voxelized result with a higher resolution than the architectural shape. Therefore, the output result is still uneditable, which is a pity.
Figure 10. Left: the hierarchical program graph. Right: the irregular grid with non-uniform voxel size and the equivalent voxel graph.[04]
Figure 11. An overview of Building-GAN. Top: the Program GNN, Voxel GNN, and Cross-Modal Pointer Module for the generator. Bottom: the discriminator with the building and story level decoders.[04]
2.2 Overview for 3D Generation Methodology
2.3 2D floor plan generation method
ArchiGAN: Artificial Intelligence x Architecture[06]
Stanislas Chaillou
ArchiGAN is a research project that uses GAN models to automatically generate building layouts.
This study unpack floor plan design into 3 distinct steps:
(I) building footprint massing (II) program repartition
(III) furniture layout
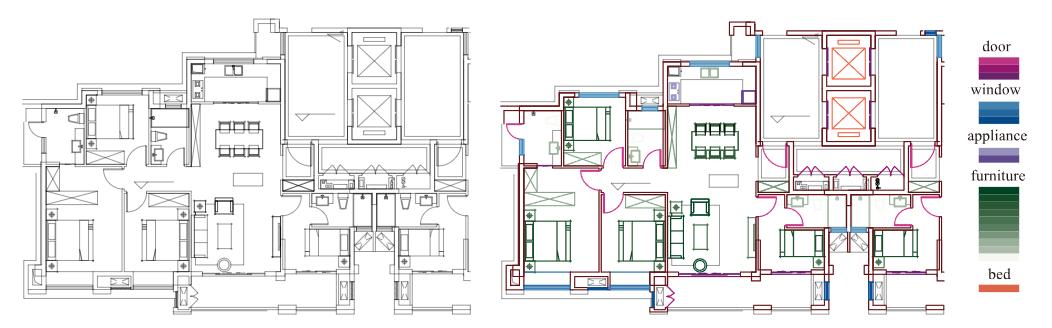
Each step corresponds to a Pix2Pix GAN-model trained to perform one of the 3 tasks above. By nesting these models one after the other, this study create an entire apartment building “generation stack” while allowing for user input at each step. The specific approach has three models. The input of the first model is the allowable red line range of the building, and the output is the generated new building footprint image; the second model uses the output of the first model as input, that is, the image of the building footprint. The output is a floor plan with interior space divisions; the input to the third model is the output of the second model, and the final generated result is a furnished apartment floor plan.
Additionally, by tackling multi-apartment processing, this project scales beyond the simplicity of single-family houses.
Overall, this research achieved a humanmachine collaborative architectural design. Its scope of application is not limited to individual apartments, but can also be extended to the design of public apartments. However, since the output result is a pixel image rather than a vector image, it is difficult to be further edited.
Graph2Plan:
Learning Floorplan Generation from Layout Graphs[07]
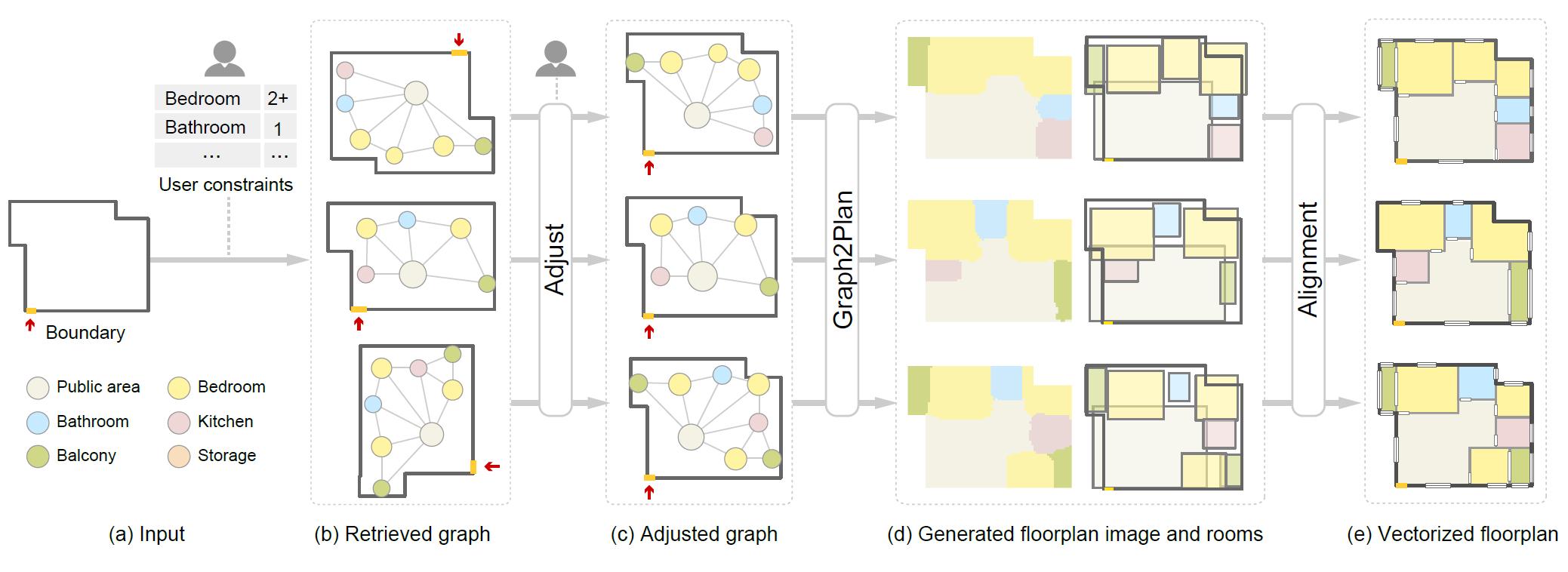
This study introduce a learning framework for automated floorplan generation which combines generative modeling using deep neural networks and userin- theloop designs to enable human users to provide sparse design constraints. Such constraints are represented by a layout graph.
The core component of this study learning framework is a deep neural network, Graph2Plan, which converts a layout graph, along with a building boundary, into a floorplan that fulfills both the layout and boundary constraints. Given an input building boundary, we allow a user to specify room counts and other layout constraints, which are used to retrieve a set of floorplans, with their associated layout graphs, from a database. For each retrieved layout graph, along with the input boundary, Graph2Plan first generates a corresponding raster floorplan image, and then a refined set of boxes representing the rooms. Graph2Plan is trained on RPLAN, a largescale dataset consisting of 80K annotated floorplans. The network is mainly based on convolutional processing over both the layout graph, via a graph neural network (GNN), and the input building boundary, as well as the raster floorplan images, via conventional image convolution.
This study demonstrate the quality and versatility of our floorplan generation framework in terms of its ability to cater to different user inputs. They conduct both qualitative and quantitative evaluations, ablation studies, and comparisons with state-of-the-art approaches.
In general, this research introduces the GNN method so that the training results can respond to user needs more accurately. The output is a vector that can be further edited.
Figure 14. Overview of the framework for automated floorplan generation.[07]
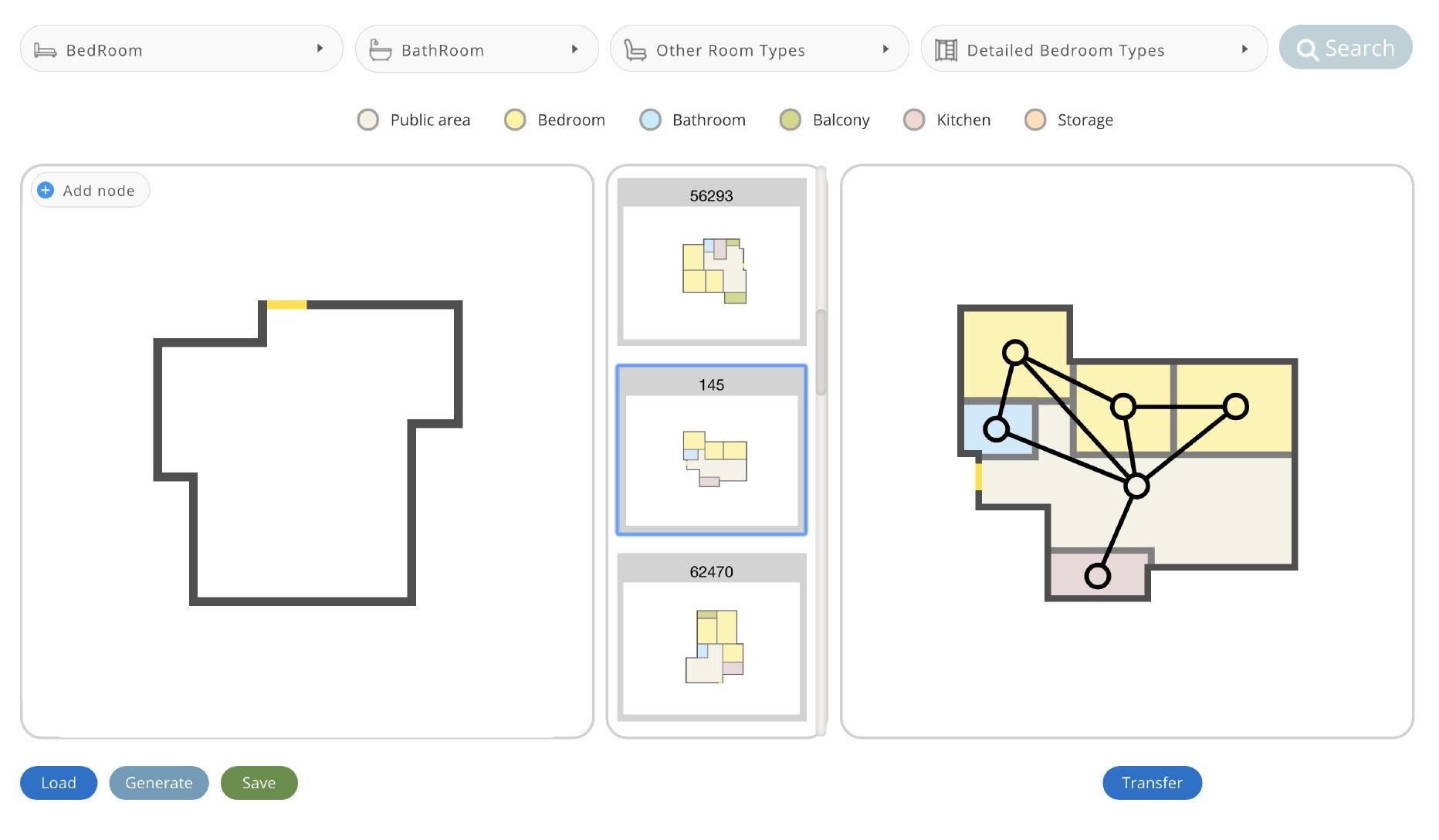
Figure 15. The interface for user-in-the-loop design of floorplans. Left: input boundary. Middle: retrieved floorplans. Right: floorplan and layout graph of a retrieved result.[07]
RuiZhen Hu, Zeyu Huang, Yuhan Tang, Oliver Van Kaick, Hao Zhang, Hui Huang.
House-GAN: Relational Generative Adversarial Networks for Graph-constrained House Layout Generation[08]
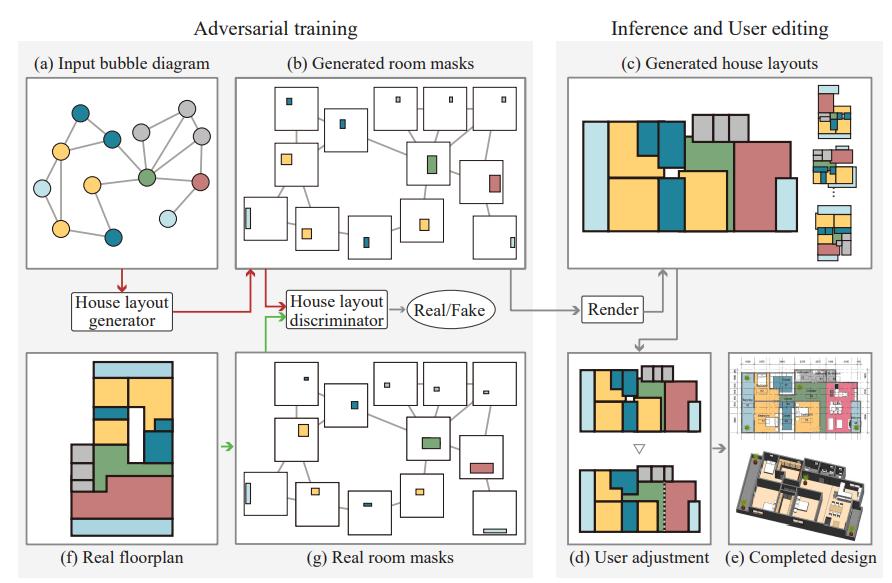
This paper proposes a novel graphconstrained generative adversarial network, whose generator and discriminator are built upon relational architecture.
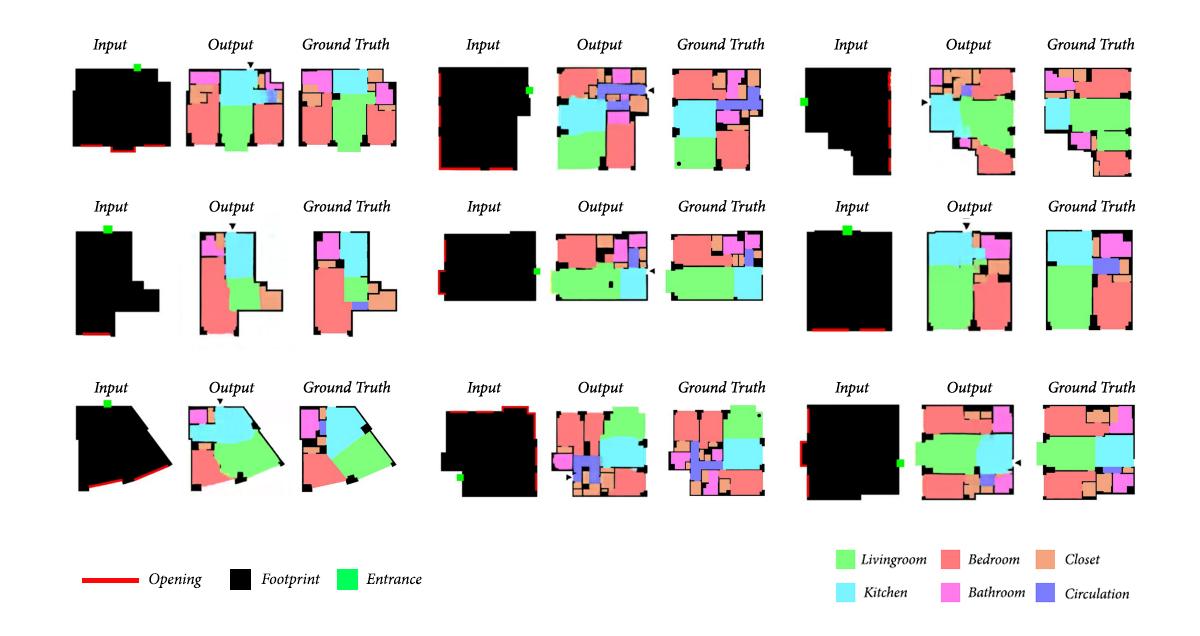
The main idea is to encode the constraint into the graph structure of its relational networks. They have demonstrated the proposed architecture for a new house layout generation problem, whose task is to take an architectural constraint as a graph (i.e., the number and types of rooms with their spatial adjacency) and produce a set of axis-aligned bounding boxes of rooms. They measure the quality of generated house layouts with the three metrics: the realism, the diversity, and the compatibility with the input graph constraint. Their qualitative and quantitative evaluations over 117,000 real floorplan images demonstrate that the proposed approach outperforms existing methods and baselines.
In summary, the input to this generator is a graph image specified by the user to represent the connections between rooms. The final result is a single apartment floor plan with internal spatial divisions. This end is also a vector output and is editable.
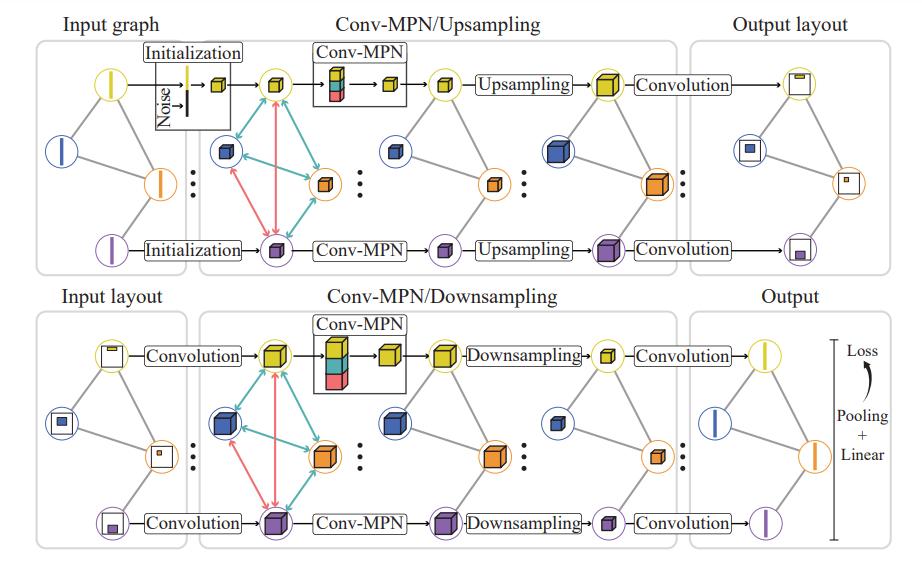
Figure 17. Relational house layout generator (top) and discriminator (bottom).[08]
Figure 16. Floorplan designing workflow with House-GAN.[08]
Nelson Nauata, Kai-Hung Chang, Chin-Yi Cheng, Greg Mori, and Yasutaka Furukawa
Graph Transformer GANs for Graph-Constrained House Generation[09]
Tang, Zhenyu Zhang, Humphrey Shi, Bo Li, Ling Shao, Nicu Sebe, Radu Timofte, Luc Van Gool
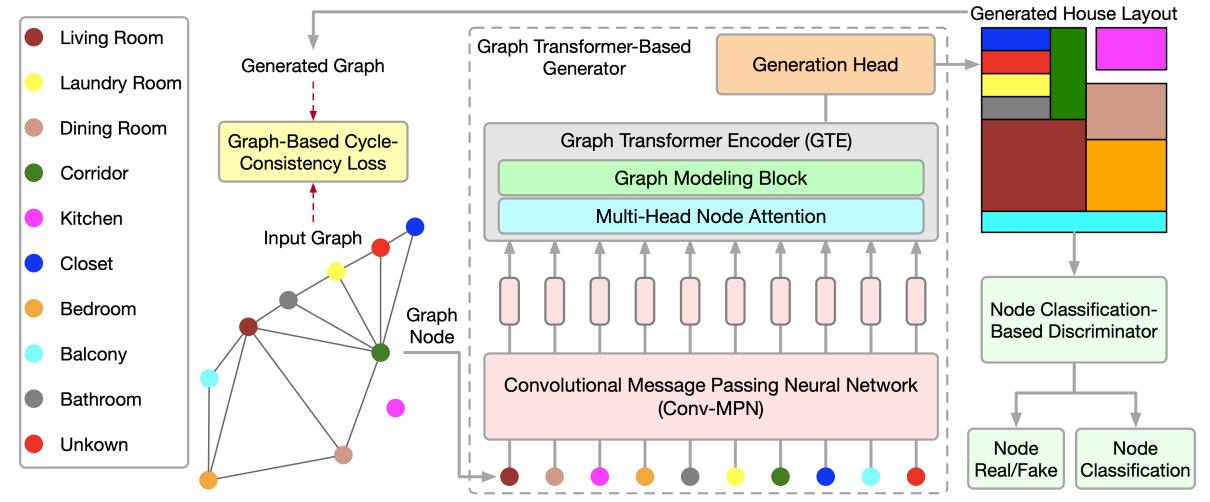
This study presents a novel graph Transformer generative adversarial network (GTGAN) to learn effective graph node relations in an endto-end fashion for the challenging graphconstrained house generation task. The proposed graphTransformerbased generator includes a novel graph Transformer encoder that combines graph convolutions and selfattentions in a Transformer to model both local and global interactions across connected and non-connected graph nodes. Specifically, the proposed connected node attention (CNA) and non-connected node attention (NNA) aim to capture the global relations across connected nodes and nonconnected nodes in the input graph, respectively.
The proposed graph modeling block (GMB) aims to exploit local vertex interactions based on a house layout topology. Moreover, they propose a new node classification-based discriminator to preserve the high-level semantic and discriminative node features for different house components.
Finally, they propose a novel graphbased cycle-consistency loss that aims at maintaining the relative spatial relationships between ground truth and predicted graphs. Experiments on two challenging graph-constrained house generation tasks (i.e., house layout and roof generation) with two public datasets demonstrate the effectiveness of GTGAN in terms of objective quantitative scores and subjective visual realism. New stateof-the-art results are established by large margins on both tasks.
In summary, this study are the first to explore using a Transformer-based architecture for the graph-constrained house generation task. The methodology is very enlightening.
Figure 18: Overview of the proposed GTGAN on house layout generation.[09]
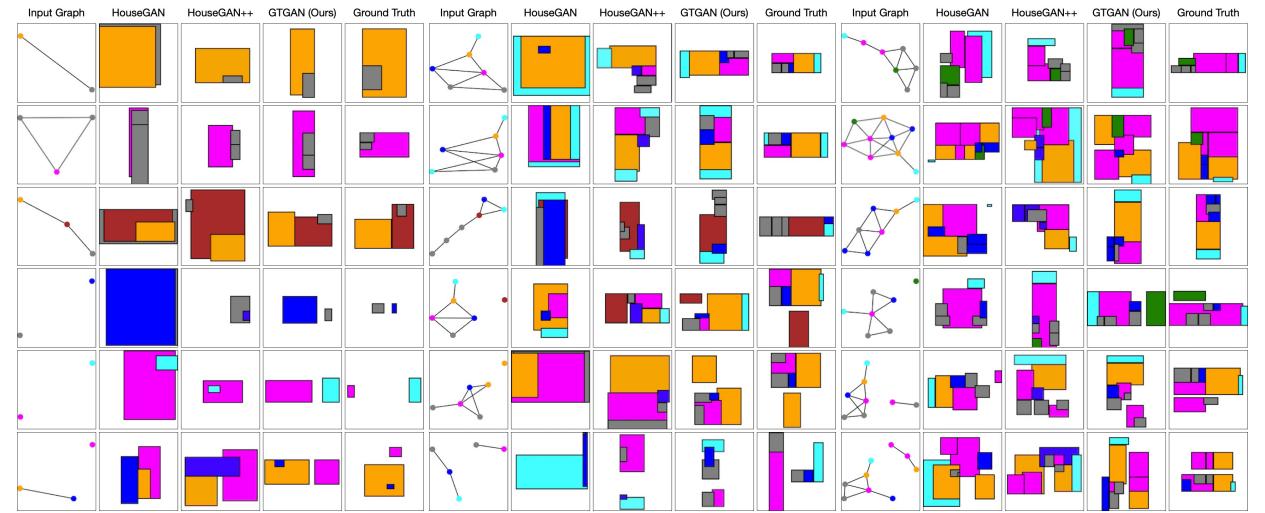
Figure 19: Visualization results compared with HouseGAN [28] and HouseGAN++ [29] on “1-3” (left), “4-6” (middle), and “7-9”(right) subset. The last three rows contain non-connected nodes.[09]
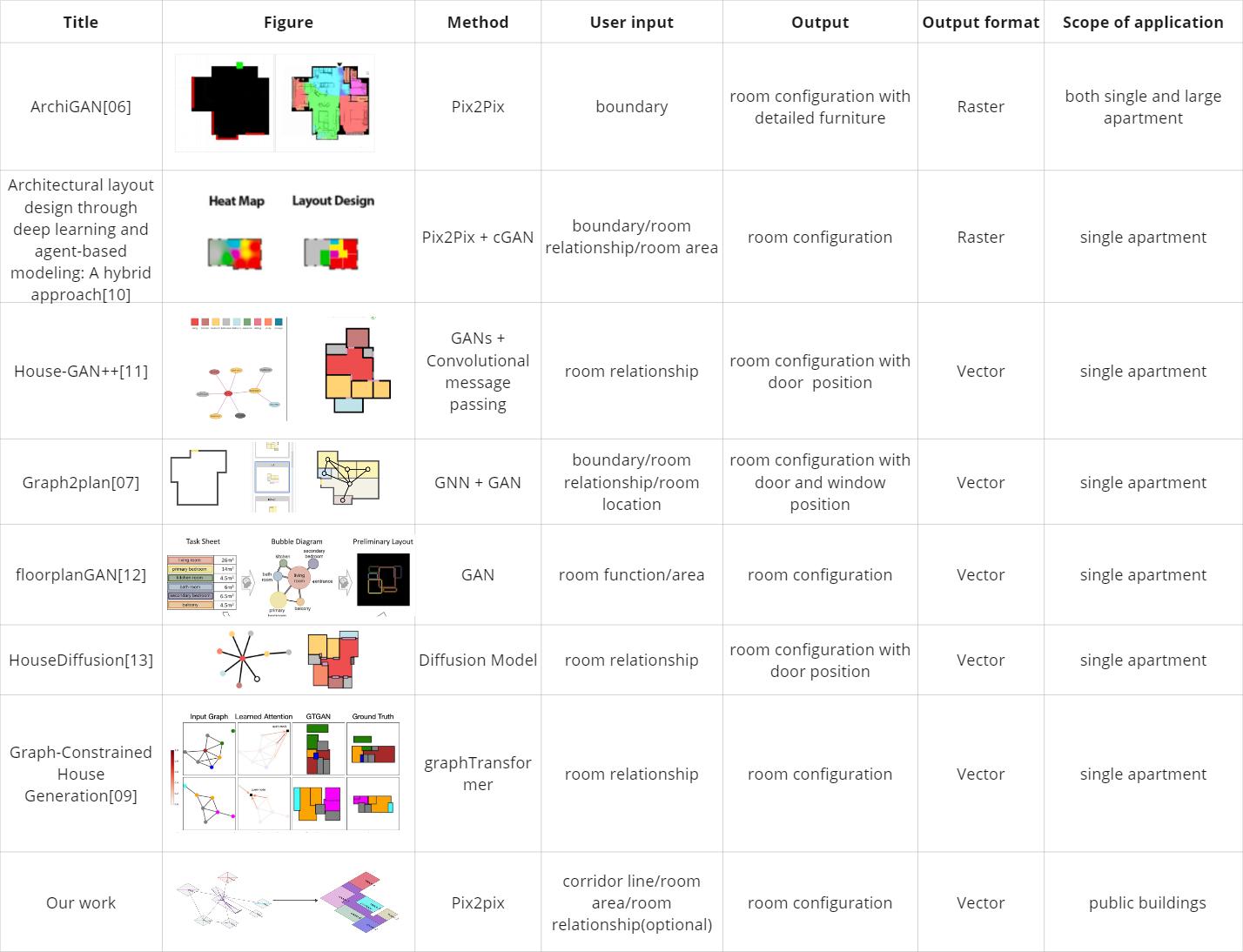
Most of the previous research started from the relationship between architectural spaces and reconstructed a plane by letting the user decide some basic information of the room, such as function, area, and adjacent relationship between rooms. For the single apartment building plane, this condition enough to produce good results.
However, for other building types such as museums, shopping malls, hospitals, etc., traffic circulation is an important element that runs through the space. This study attempts to introduce another condition on the basis of satisfying the basic constraints, focusing on the close relationship between the building plane and its traffic space.
Comparison with previous studies, this research will solve this :
1, This research attempts to find a more precise method to capture building features and learn from it. (both applies to 2d and 3d).
2, not only single apartment, but also explore the possibility to generate public buildings.
3, In addition to meeting the basic conditions for rational building generation, this study will also introduce ‘circulation’, which is an important element of public buildings.
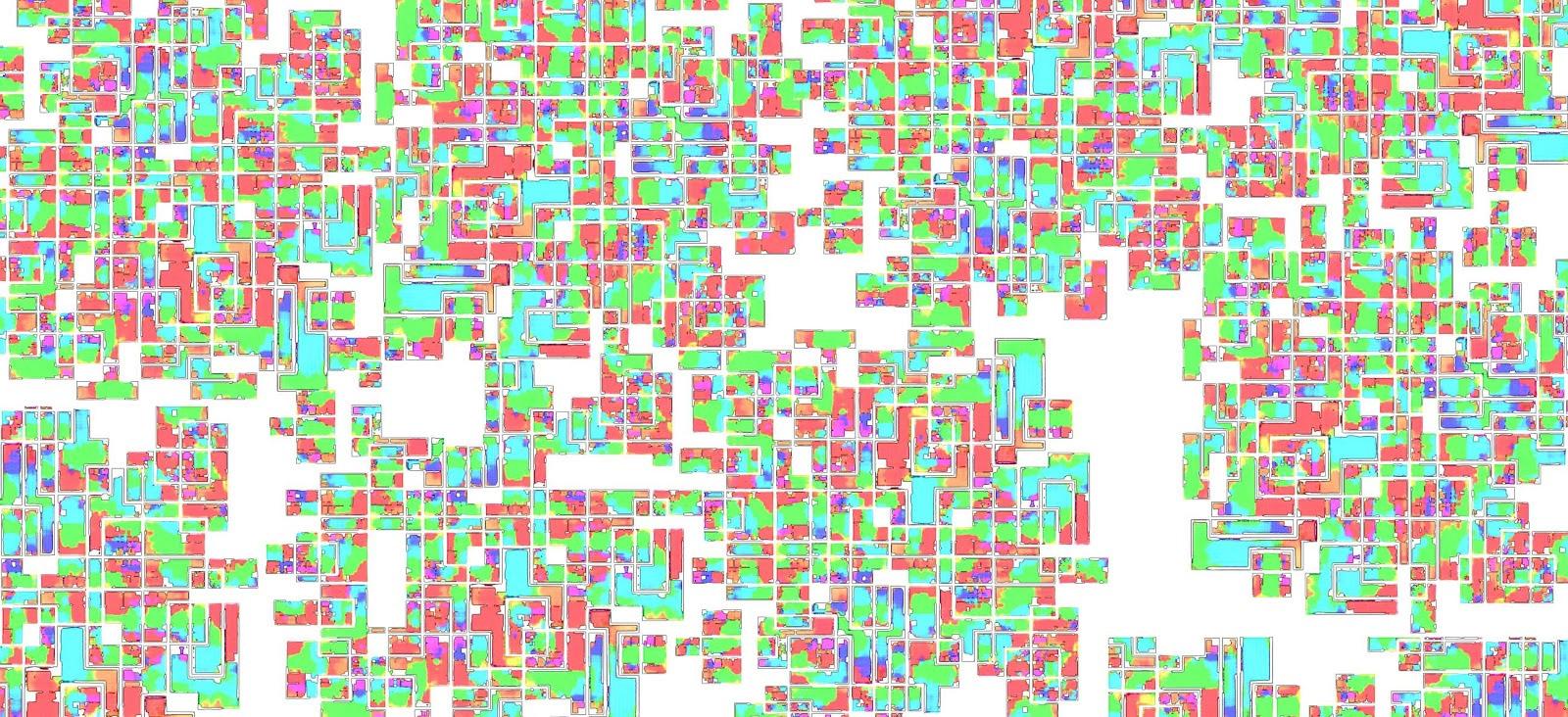
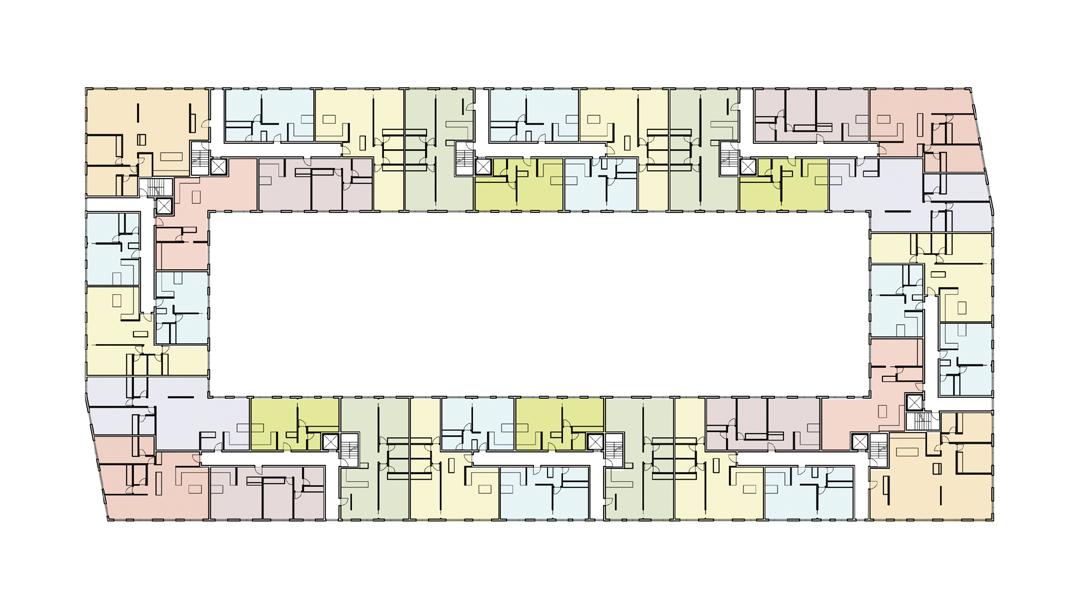
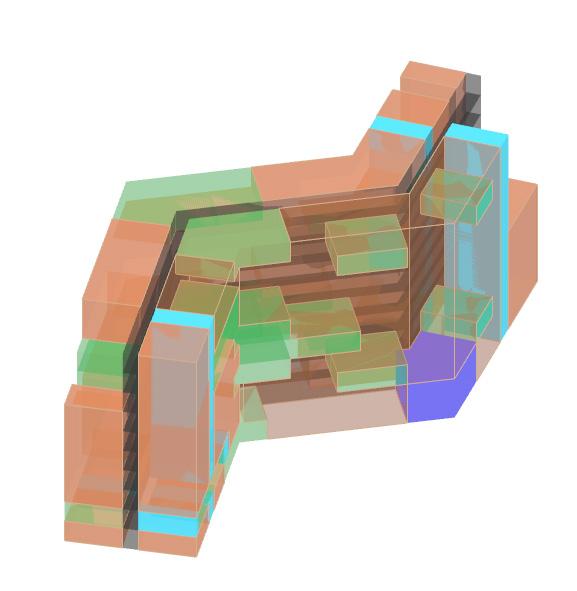
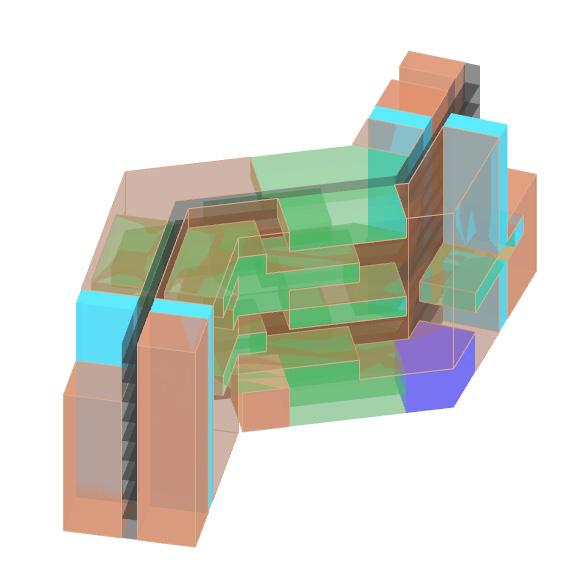
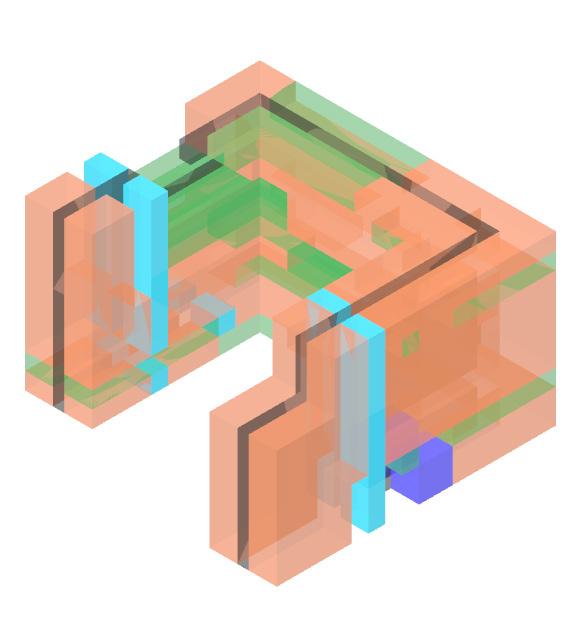
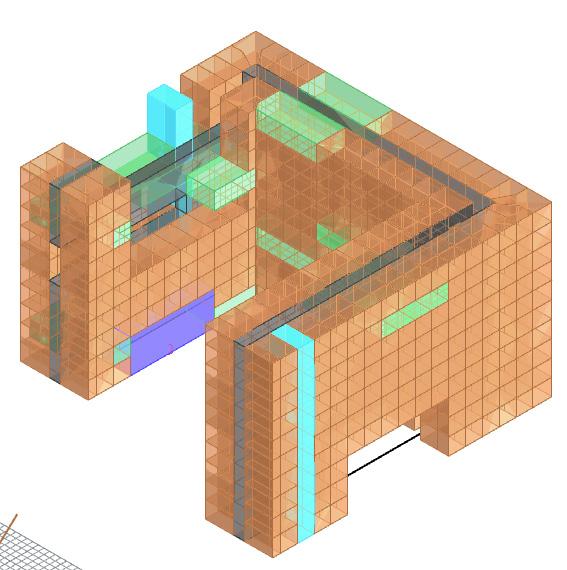
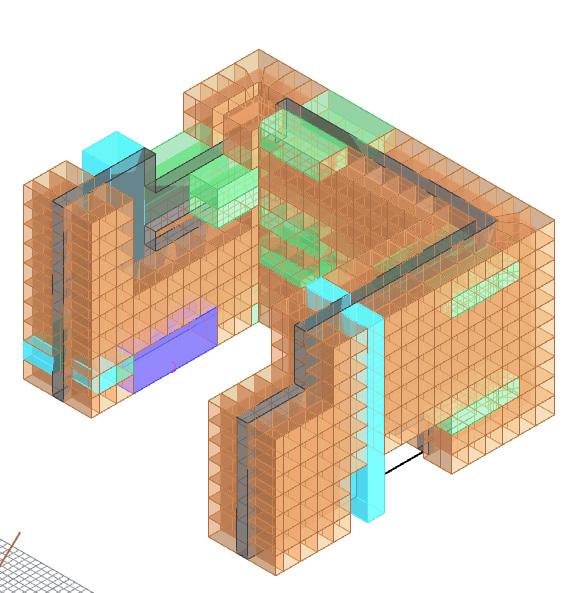
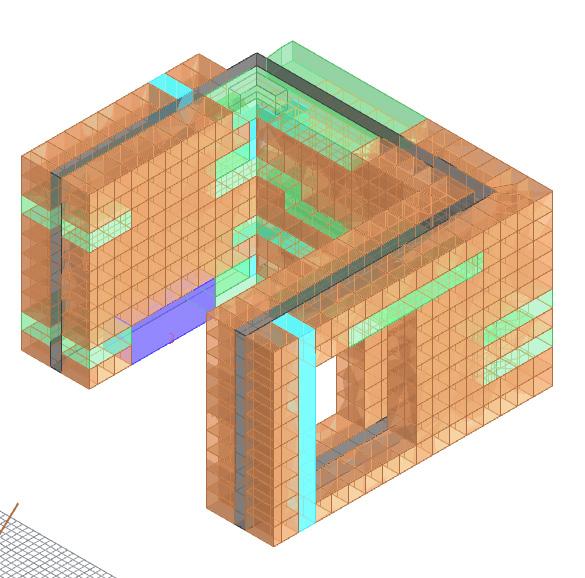
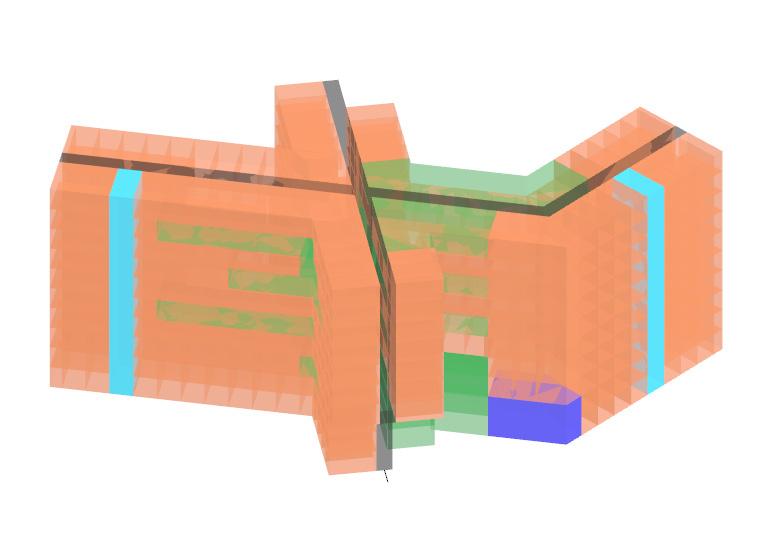
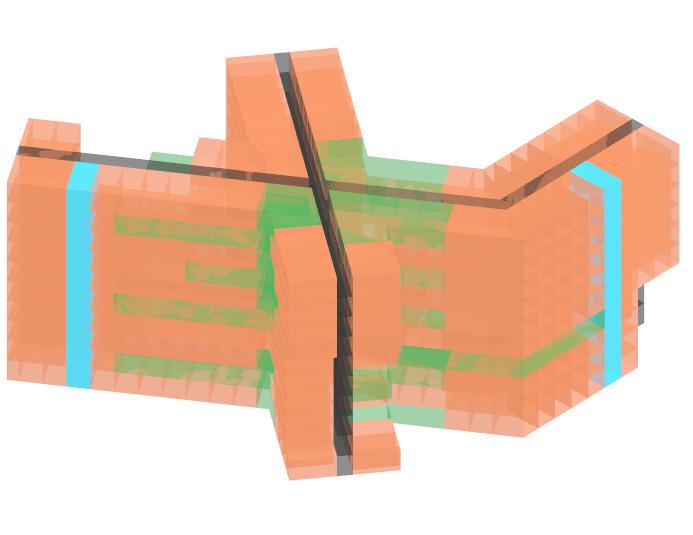
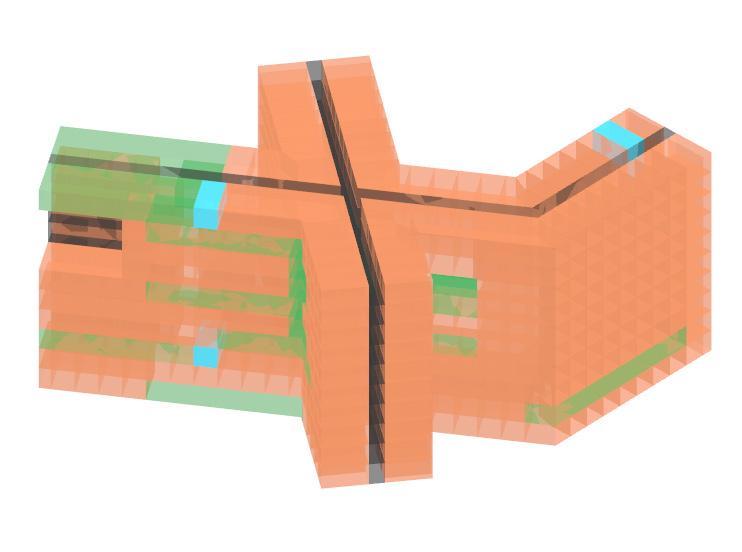
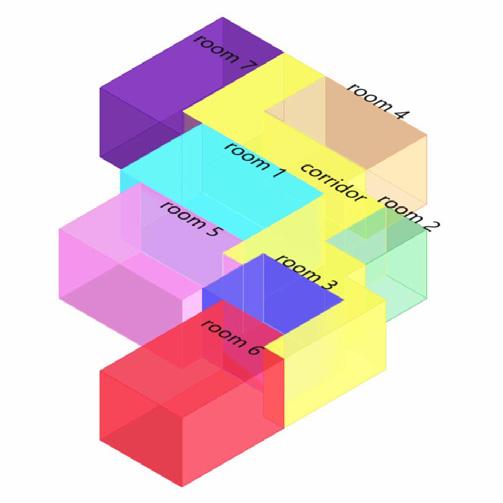
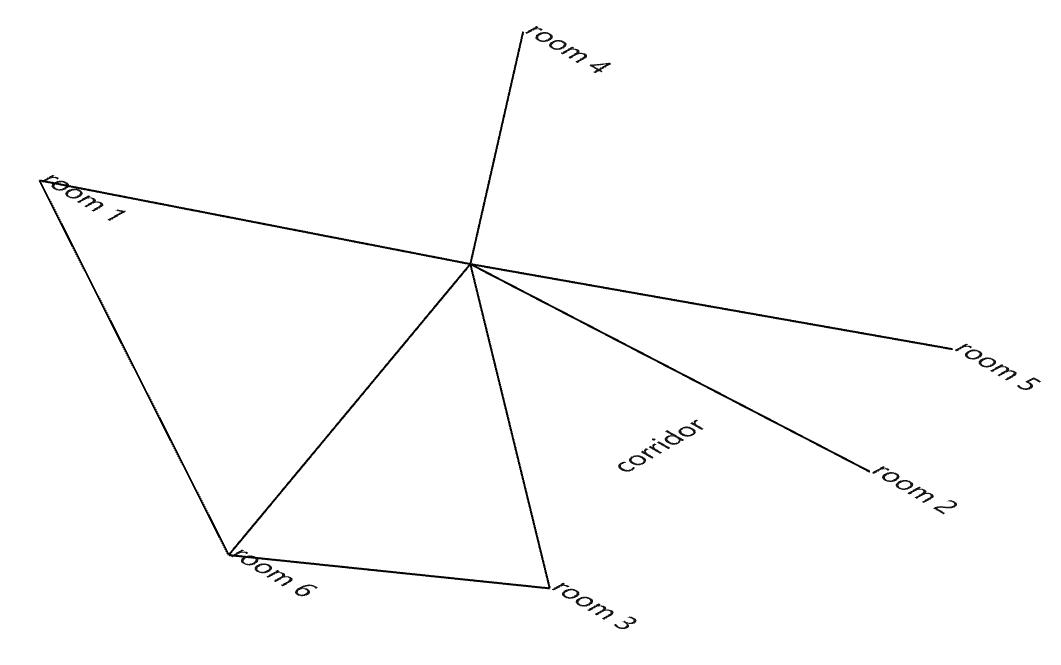
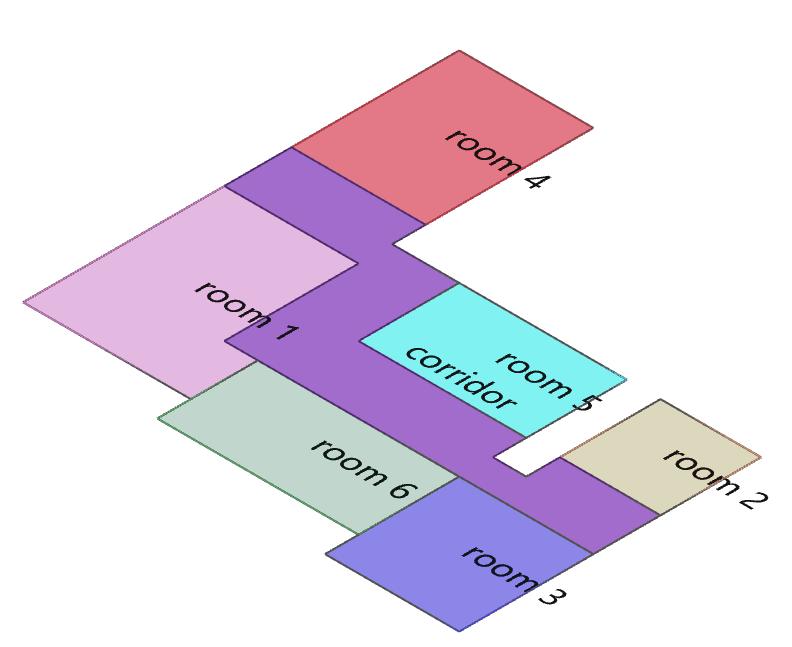
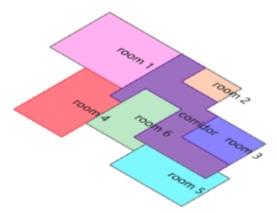
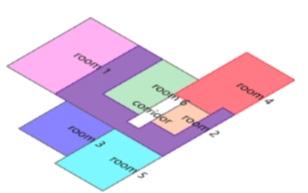
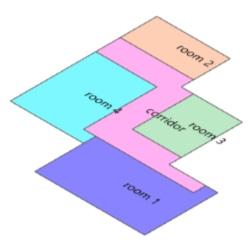
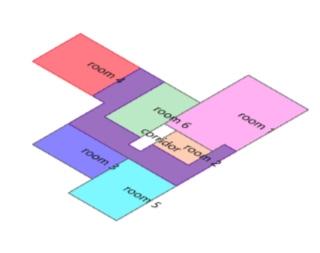
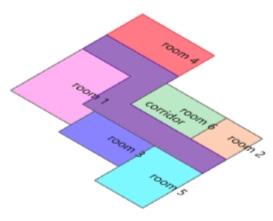
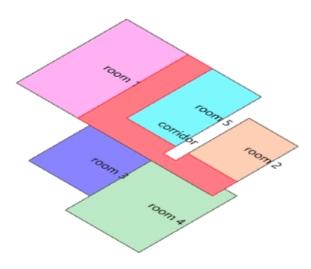
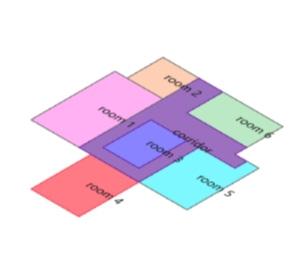
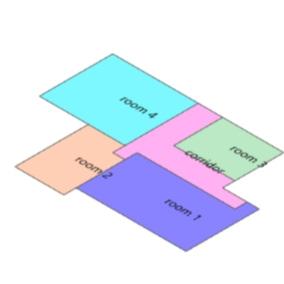
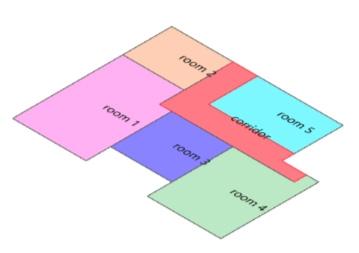
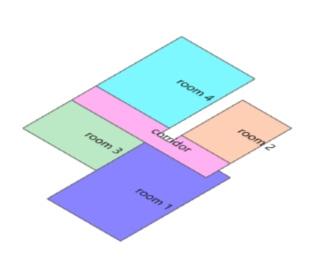
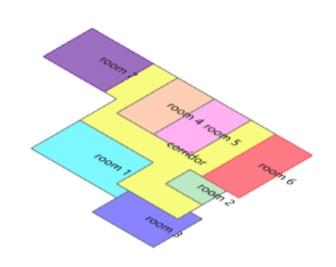
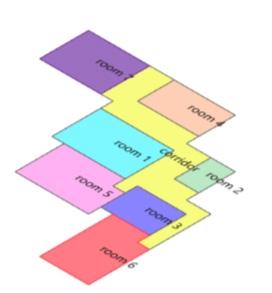
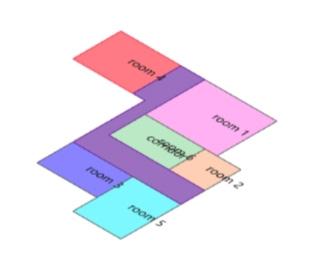
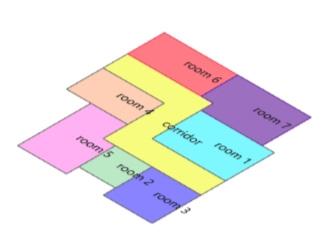
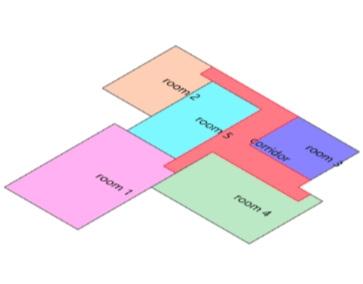
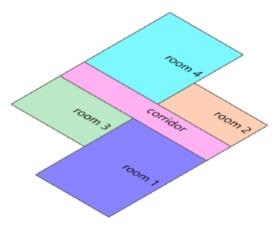
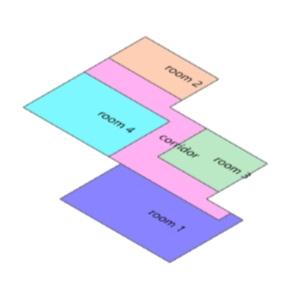
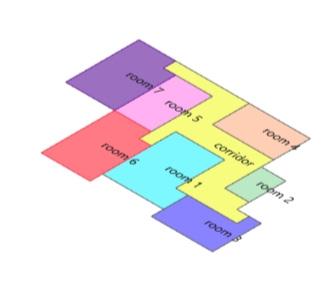
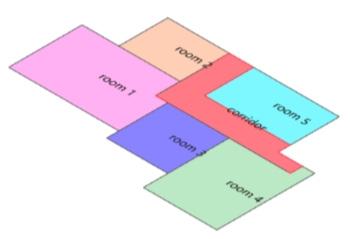
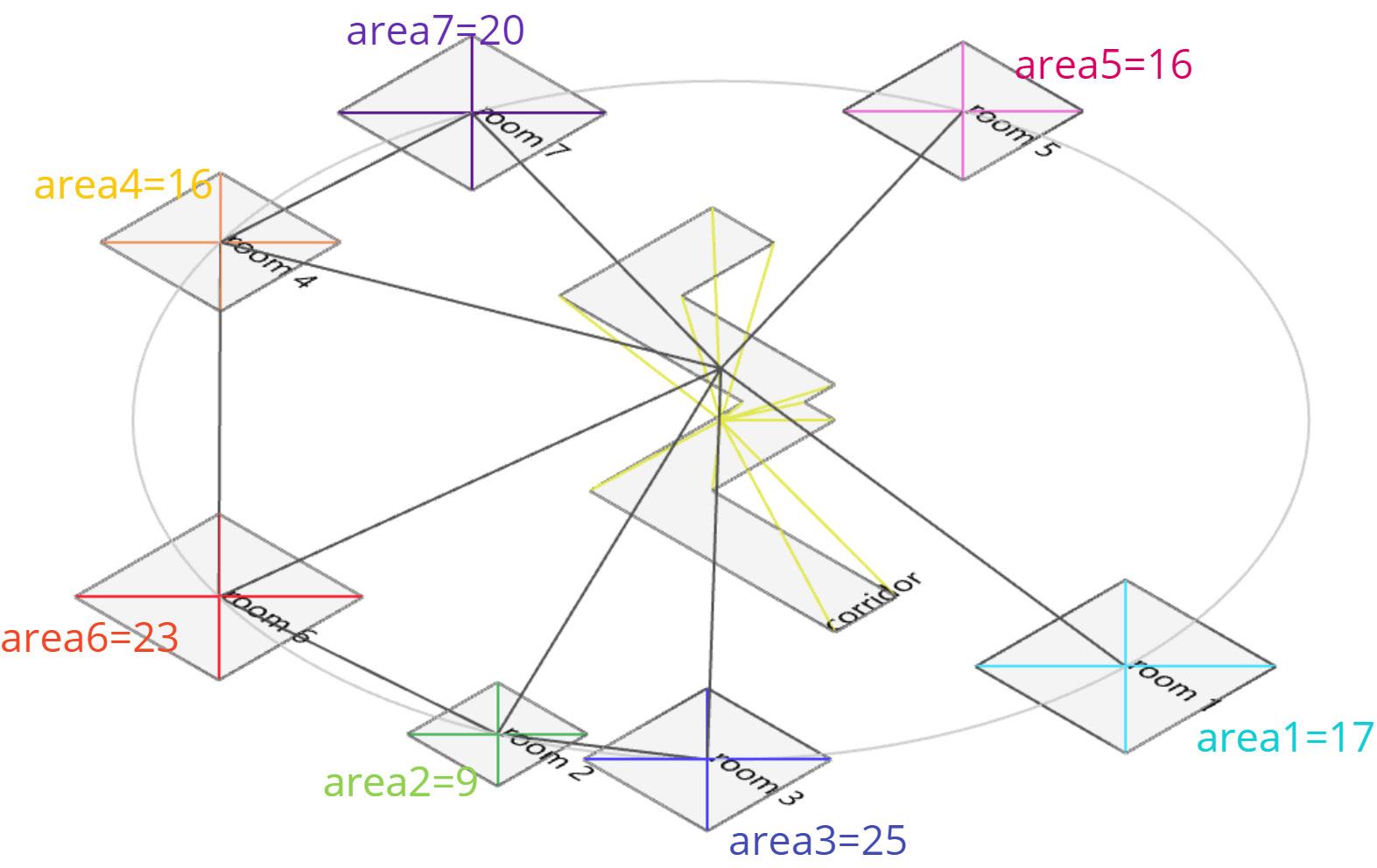
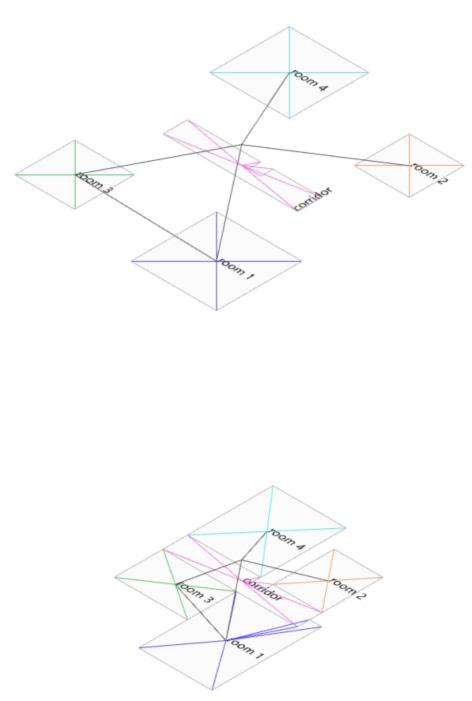
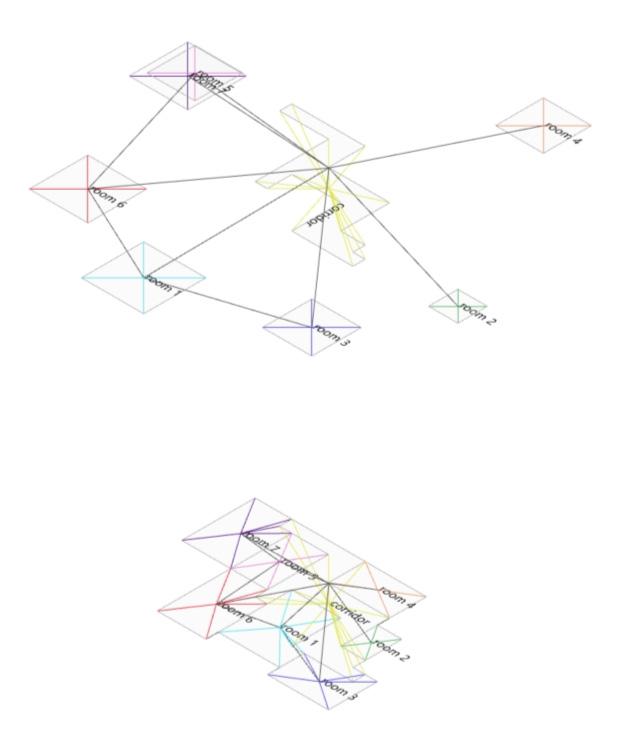
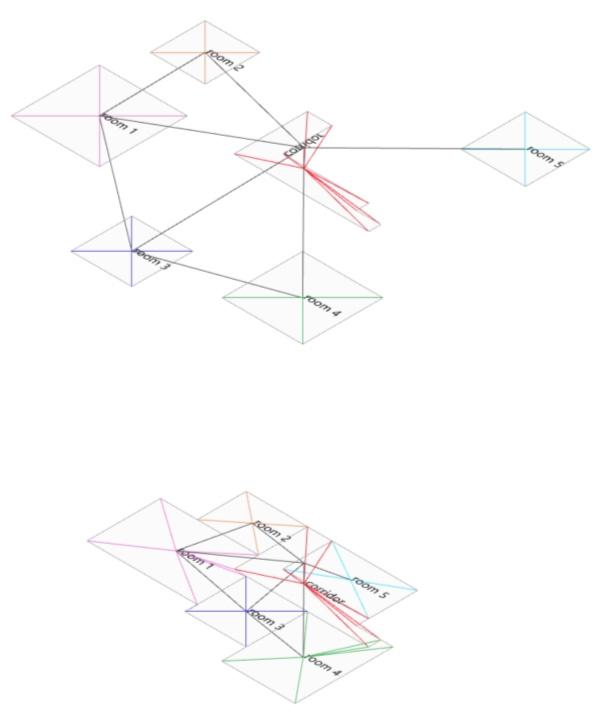
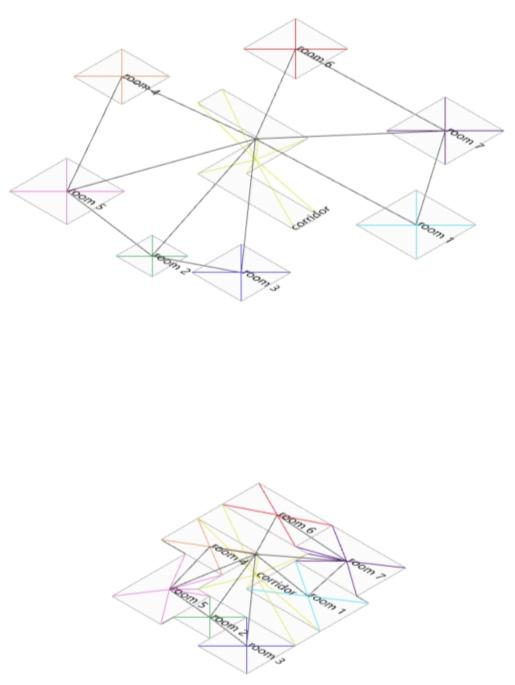
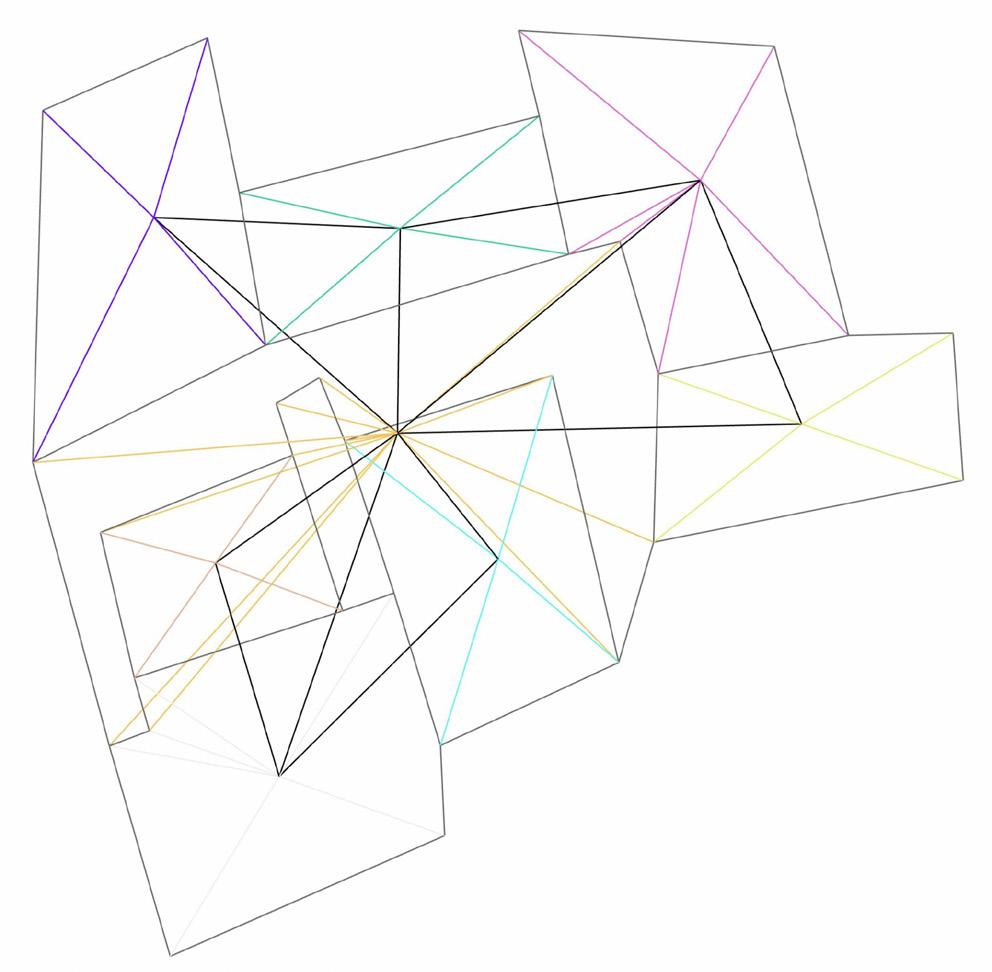
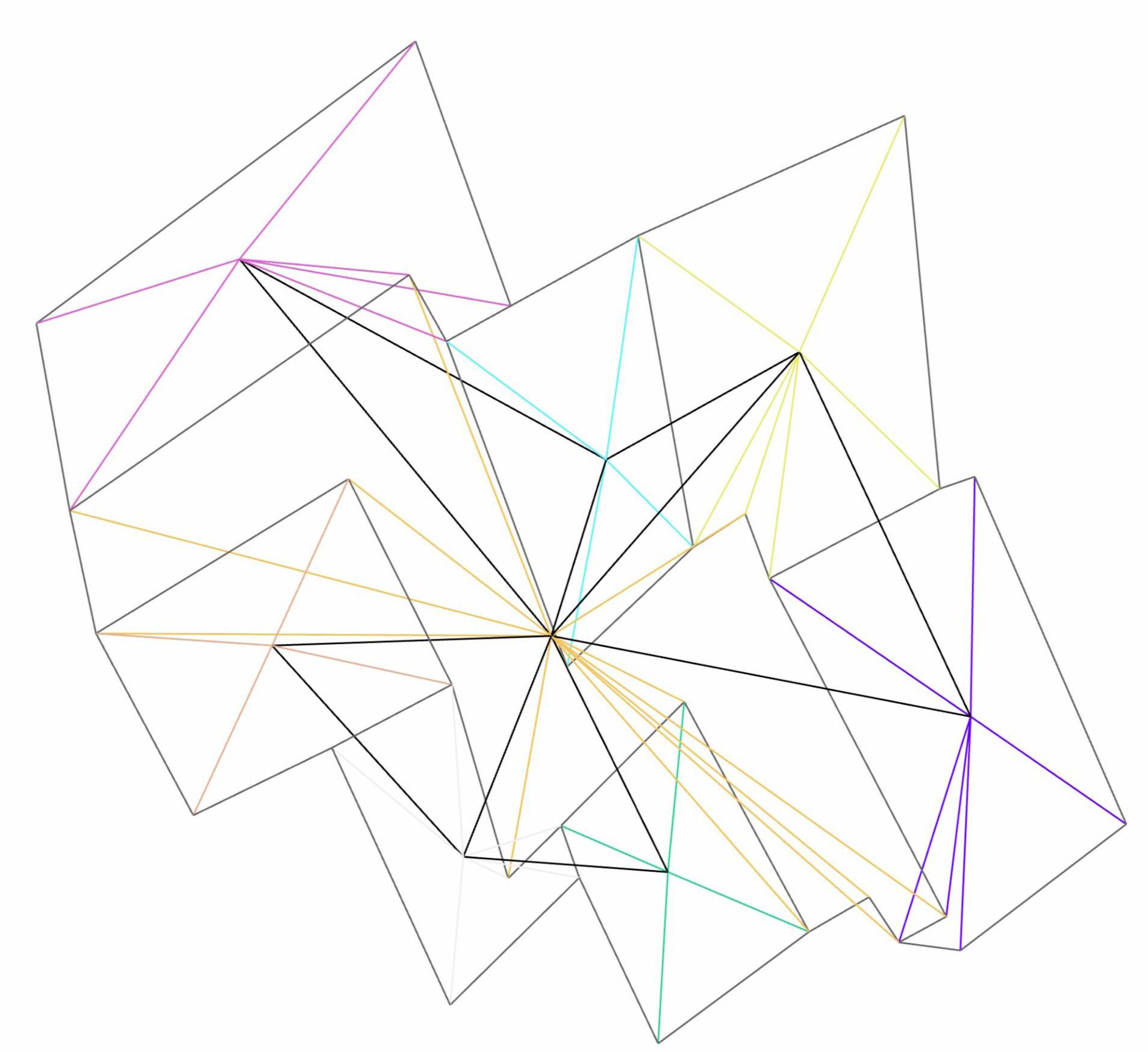
This example was generated by Grasshopper. Different colors in the picture represent different functions in public buildings. The gray part is the corridor space, which simulates the situation of generating a complete building by first specifying the corridor space. When inputting different corridor space reference lines, we can get different random results. As mentioned above, the spatial layout of public buildings often depends on their traffic circulation. Most functional spaces need to be connected to corridors, so it is meaningful to study how to guide the layout of a building through corridors.
3.2 How to embed the info
For a 3D building, we usually need to consider several types of information:
- room function
- room area
- room geometry
- rooms relationship between each other
If the above information can be embedded and learned, then it is theoretically feasible to generate a new building based on the above features.
Methodology proposal
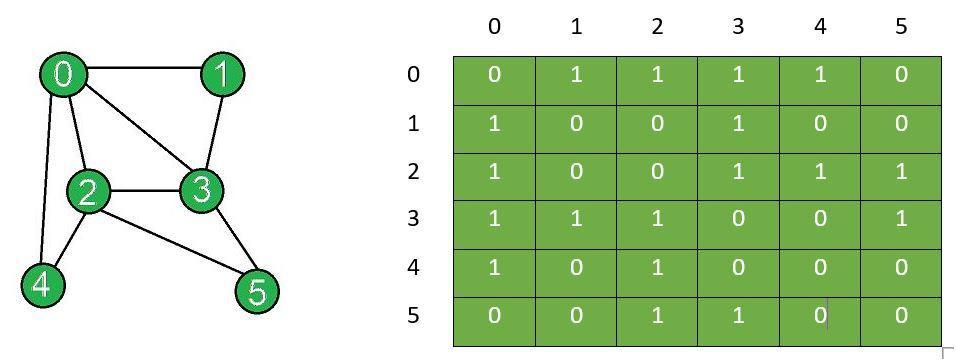
Adjacency Matrix: a matrix with rows and columns labeled by graph vertices, with a 1 or 0 in position according to whether and. are adjacent or not.
Can we use different matrix to represent some information?
Adjacency matrix + + Distance matrix ? matrix
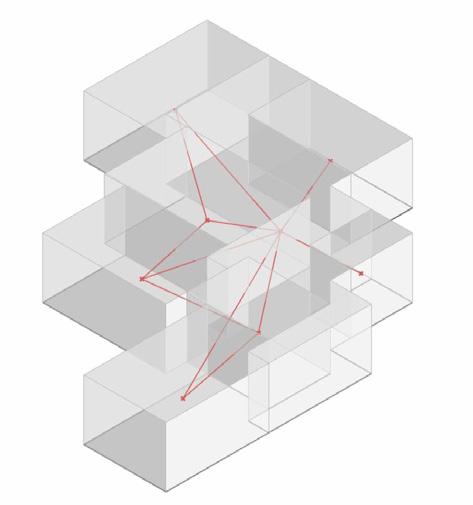
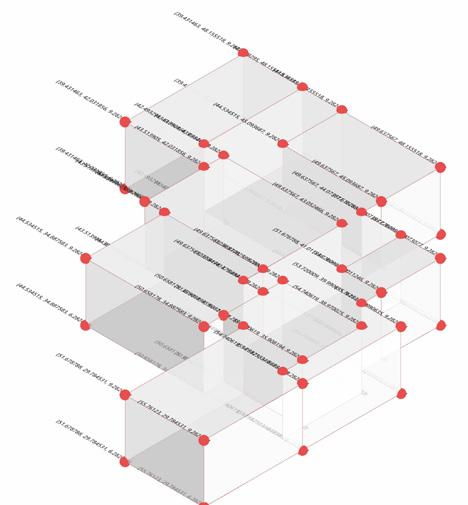
3.3 Methodology exploration
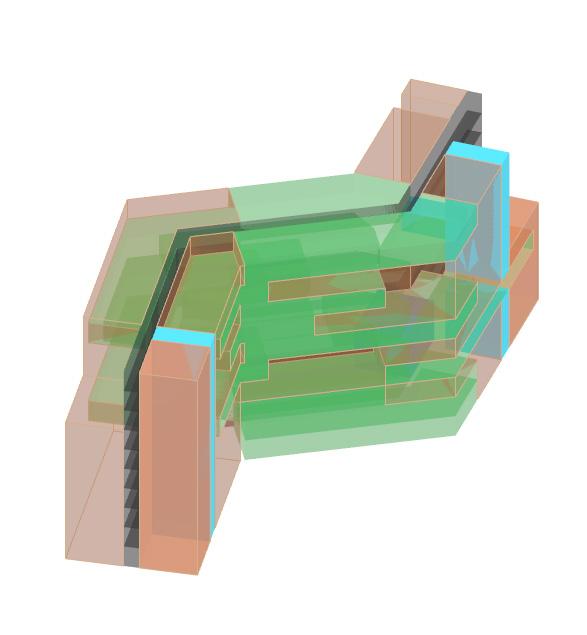
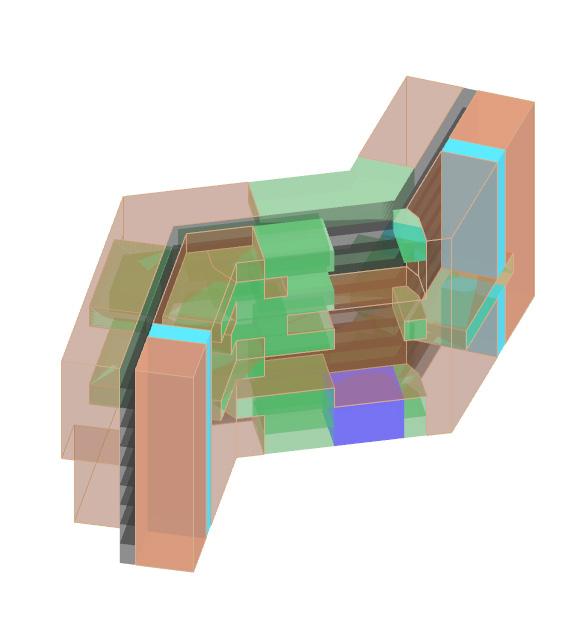
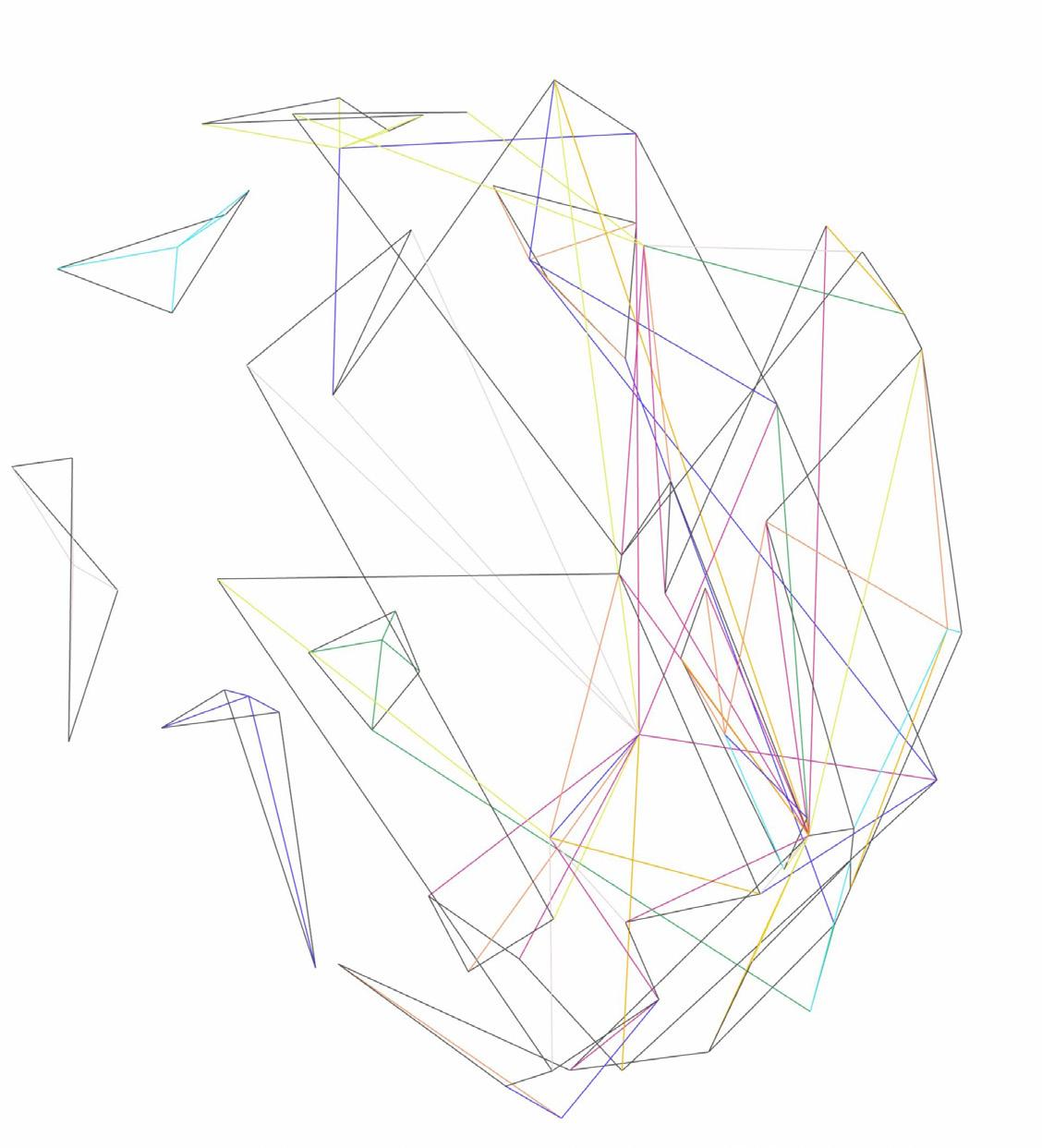
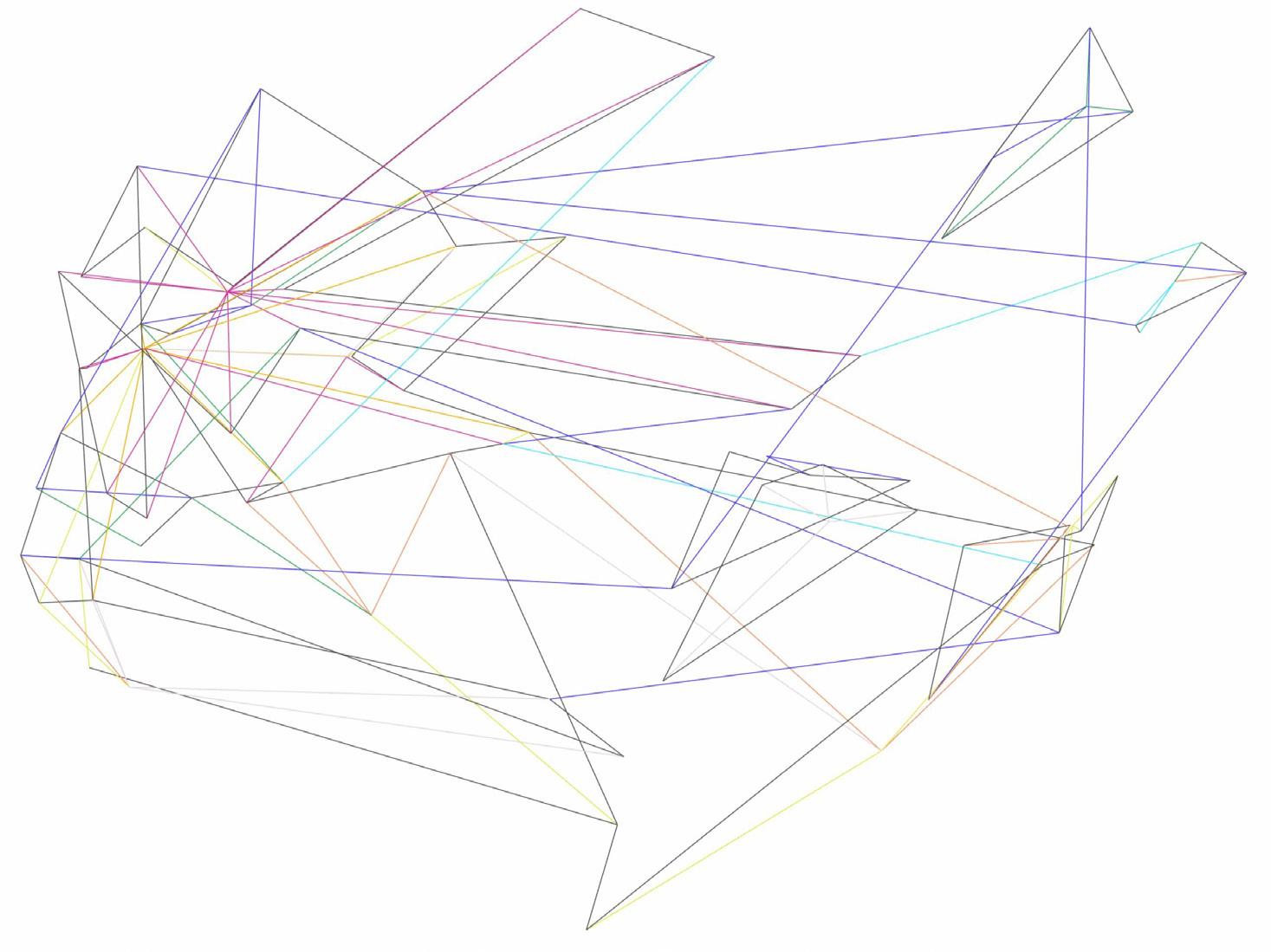
This research initially attempted to encode and generate 3D architectural space through ML. According to the theory of adjacency matrix, we try to extract the points and edges of each shape in 3D space, and encode the connectivity between two points, the length of the edge, the relative position of the points, etc. in the form of an adjacency matrix. These matrix images can be read and learned by the pix2pix model.
When we get the prediction results, we can return to GH to reconstruct the geometry and get the new model generated.
However, in actual practice, this attempt has some limitations.
3.4 Limitation 3.5 Ideal outcome
A plan generator that flows with the corridor
user input(constrains)
But when I start dataset and training , there is some problems:
- Lack of real 3D building datasets.
- Due to the pixel limit of the pix2pix model, it cannot handle large public buildings with more than 512 feature points.
1. Draw a reference line for corridor.
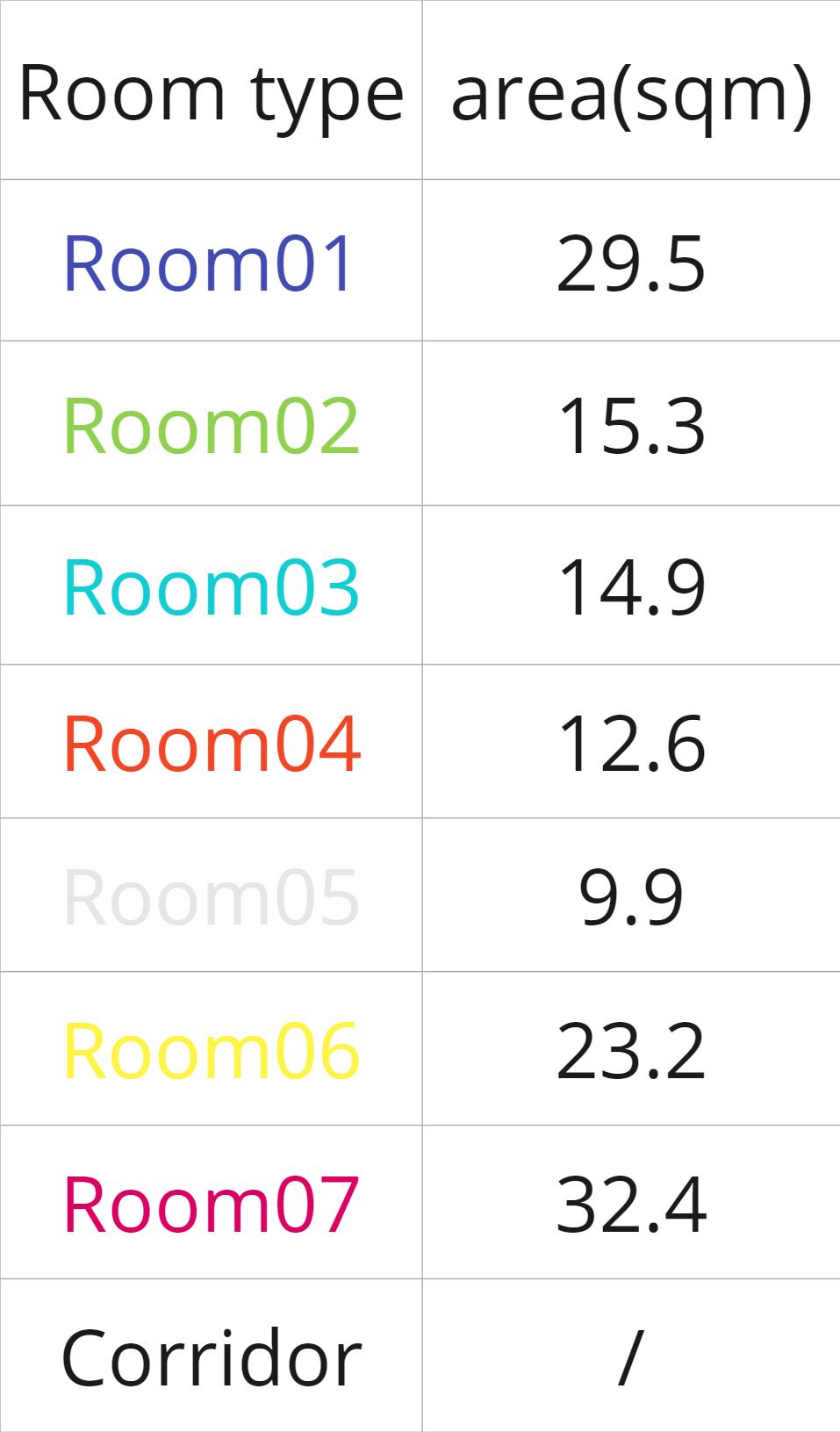
room01: 28sqm
room02: 7sqm
room03: 13sqm
room04: 18sqm
room05: 16sqm
room06: 14sqm
2. Define the function and area you want.
3. Define the relation of these rooms if you need.
Considering that the standard floor plan of a public building can represent the layout of the entire building in general. Therefore, this research will first start with the generation of 2D floor plans, verify the possibility of this methodology, and propose a feasible solution for subsequent generation of architectural 3D space.
expected outcome
Plan configuration result
The purpose of this research is to develop an architectural plan generator that can interact with users. Users only need to input some simple conditions as constraints. For example, the reference line of the corridor, the number of rooms required and their corresponding areas, and the relationship between each room. The result we are looking forward to is that through machine learning training, the generator can generate a more reasonable building floor plan layout based on these limited conditions.
Pix2pix model/ Workflow
Pix2Pix Model
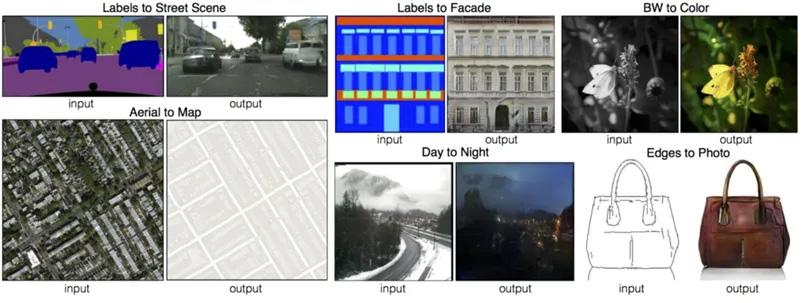
Pix2Pix[14], short for "Image-to-Image Translation with Conditional Adversarial Networks," is a deep learning model and framework used for image translation tasks. Developed by Phillip Isola, Jun-Yan Zhu, Tinghui Zhou, and Alexei A. Efros at the University of California, Berkeley, Pix2Pix has gained popularity for its ability to generate images that transform one type of visual data into another while maintaining the overall structure and coherence of the input image.
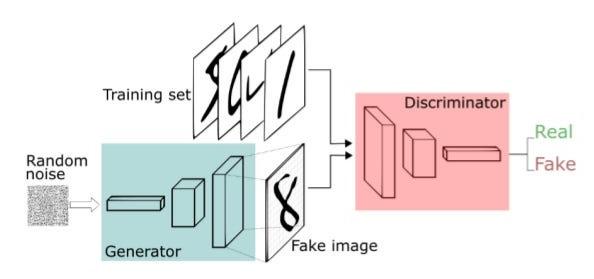
Pix2Pix is built upon the foundation of GANs(Generative Adversarial Network). GANs consist of two neural networks: a generator and a discriminator. The generator takes random noise as input and tries to generate data (in this case, images) that is indistinguishable from real data, while the discriminator aims to differentiate between real and generated data. Pix2Pix extends this concept by making the generator's output conditional on an input image.
This study choose Pix2Pix model for trianing, beacuse of:
- pairs of data, with clear output and input, allowing the establishment of a connection between constraint and outcome.
22. GAN architecture.[15] https://medium.com/analytics-vidhya/learning-generative-adversarial-networks-gans-6036a612a370.
Figure 21. Pix2pix: Image-to-image translation with a conditional GAN. Tensorflow.[14]
Figure
# 05 Dataset generation
Data generation/ Feature embed
open dataset
There are many labeled building plan data sets used for machine learning training, such as RPlan[16] and FloorPlanCAD Dataset[17].
RPLAN[16] - a manually collected largescale densely annotated dataset of floor plans from real residential buildings. It generated by Wenming Wu, Xiao-Ming Fu, Rui Tang, Yuhan Wang, Yu-Hao Qi and Ligang Liu.
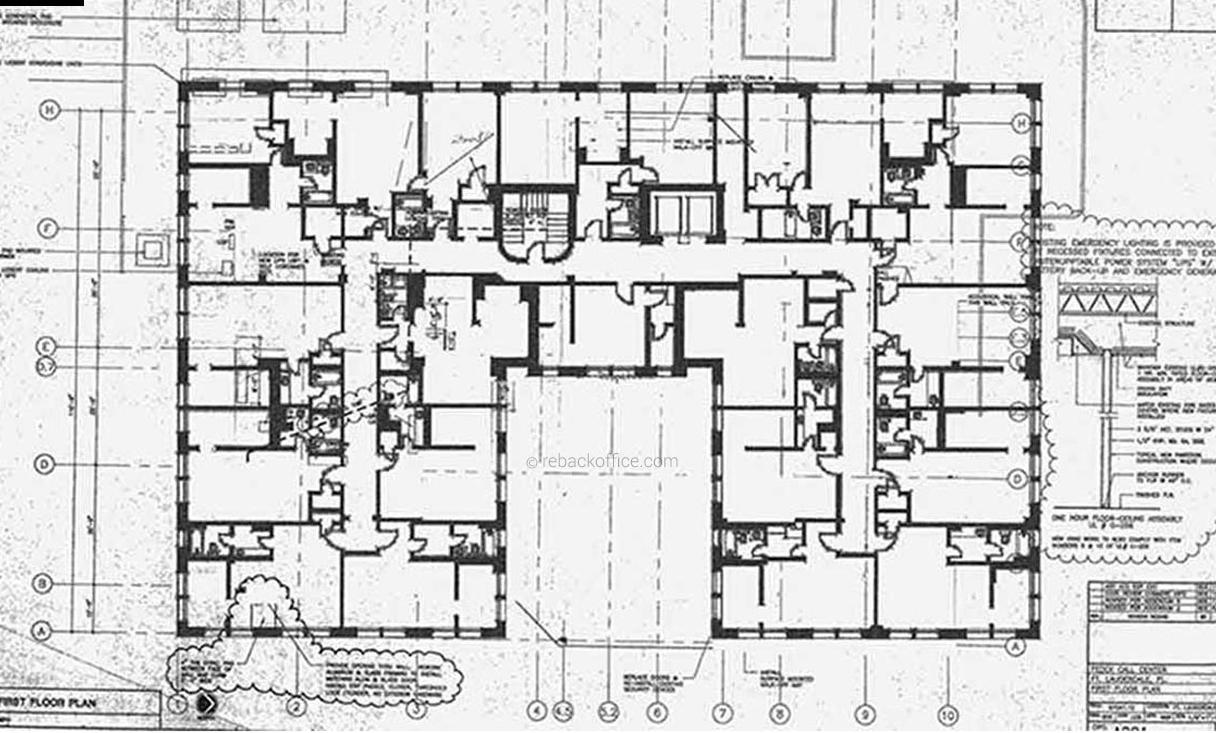
FloorPlanCAD[17] - a large-scale realworld CAD drawing dataset containing over 15,000 floor plans, ranging from residential to commercial buildings. With line-grained annotations, they introduce the panoptic symbol spotting task, which requires spotting both instances of countable things and semantics of the uncountable stuff.
But in this study, we didn't use any real open dataset. We generated them in grasshopper. Beacuse we consider:
- Open dataset are usully without labeled corridor information.
- Lack of dataset on public building plans.
Figure 23: RPlan dataset. [16]
Figure 24: FloorPlanCAD Dataset. [17]
5.2 Grasshopper Generate Dataset
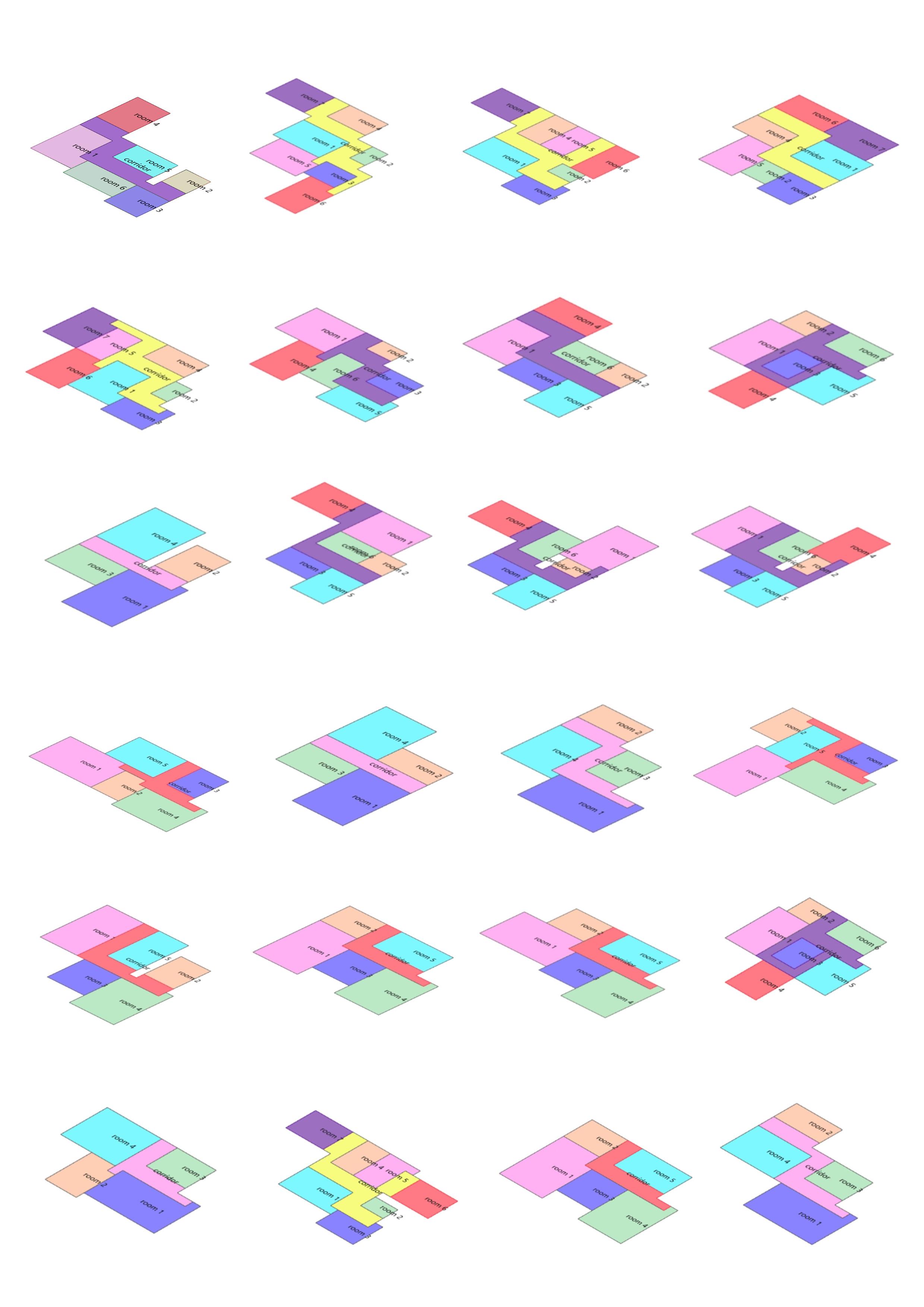
This study produced thousands of different floor plans through the Magnetizing plug-in in Grasshopper. They differ in the number of rooms, room area, and relationship between rooms. These floor plans will serve as the output dataset in ML training. Next, we will further discuss how to embed features and how to generate the Input dataset required for ML training based on these floor plans.
5.3 Embed Feature
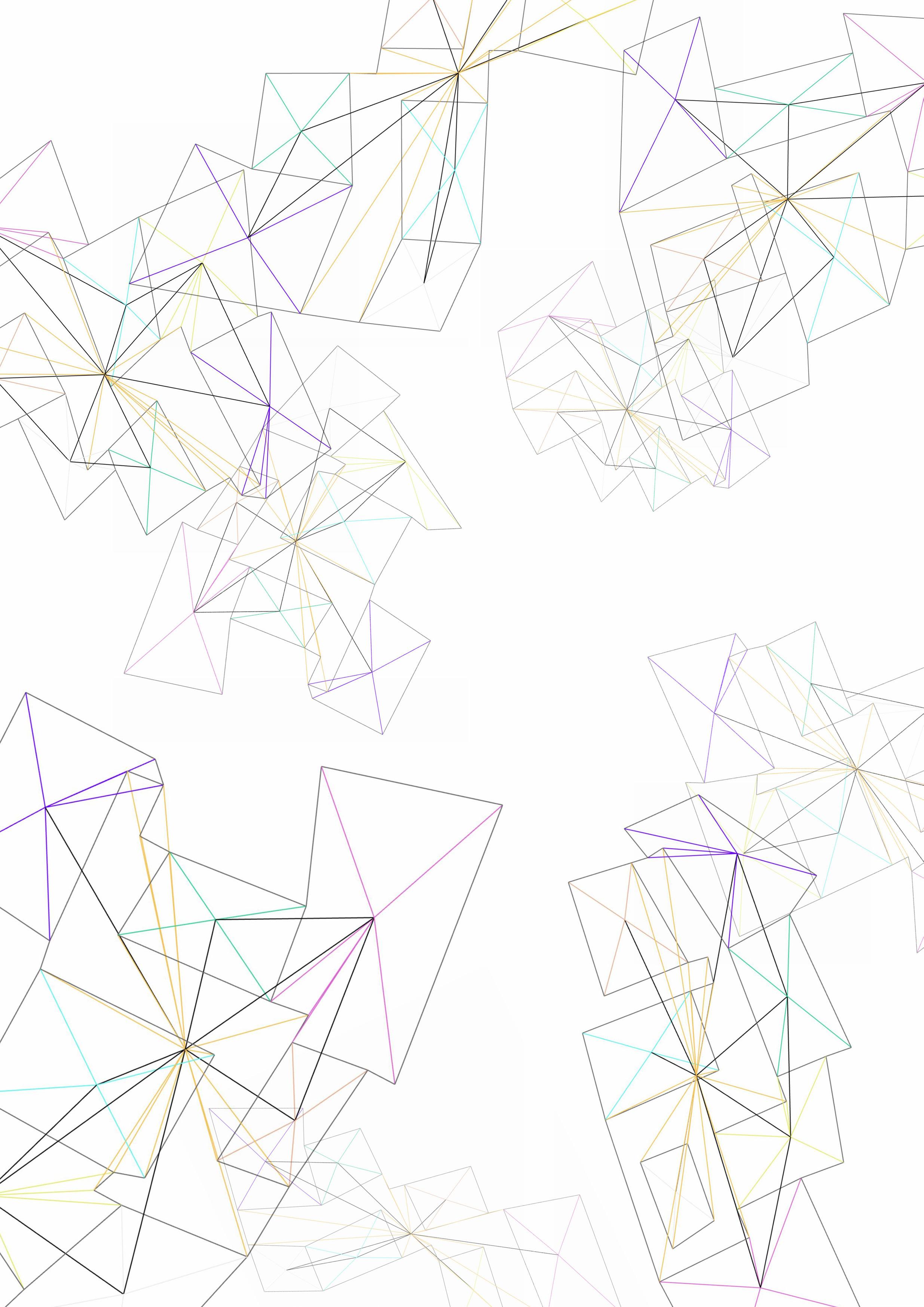
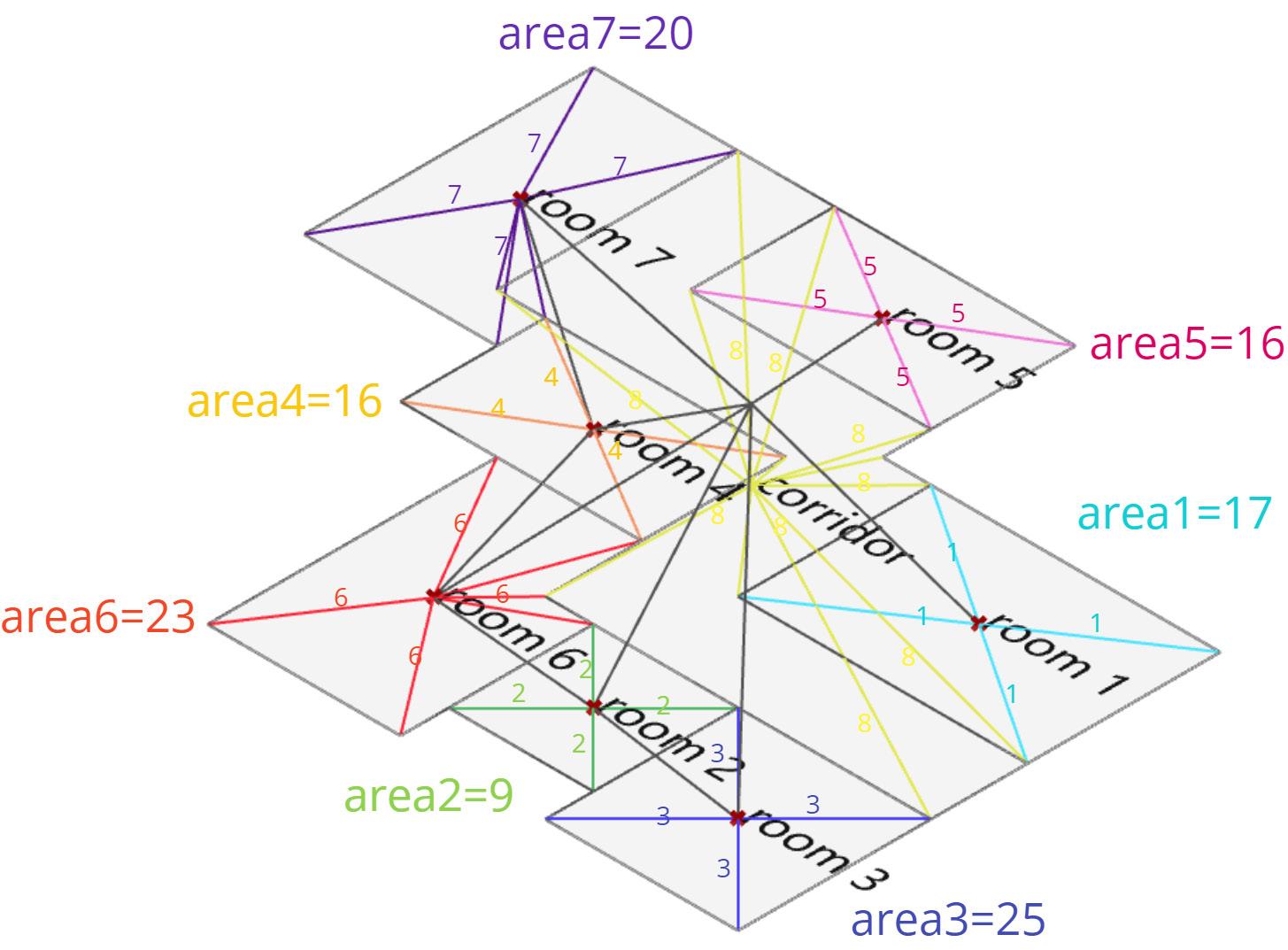
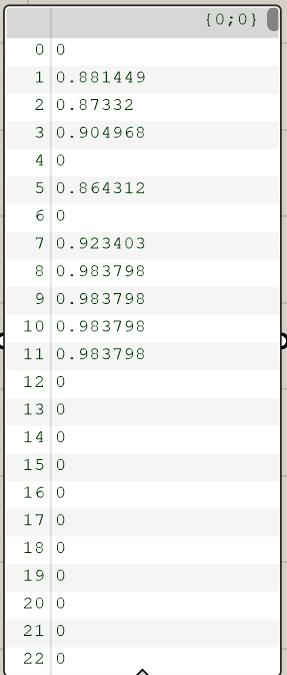
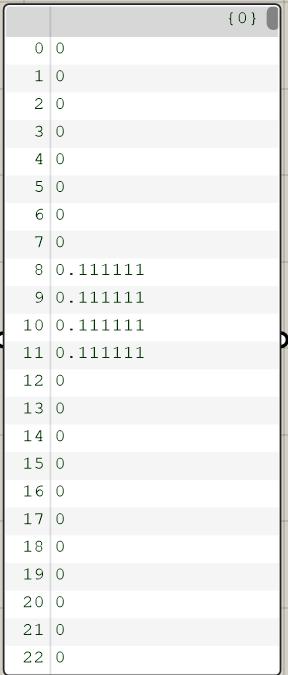
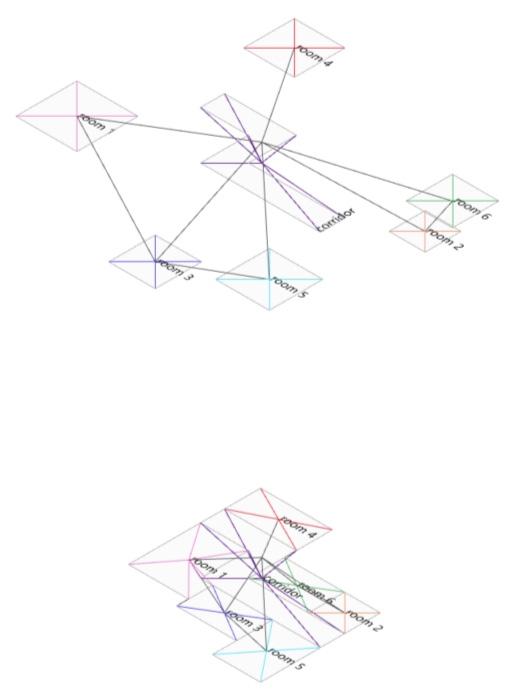
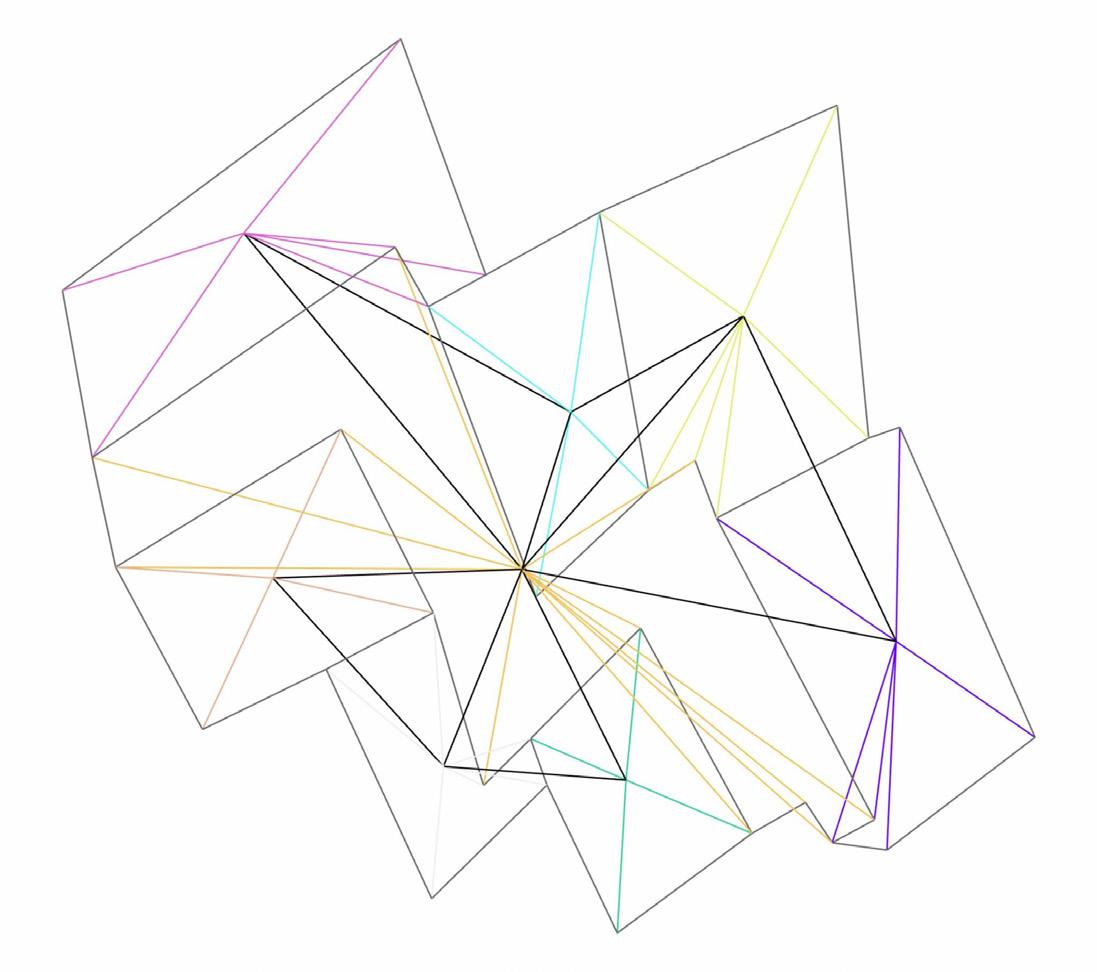
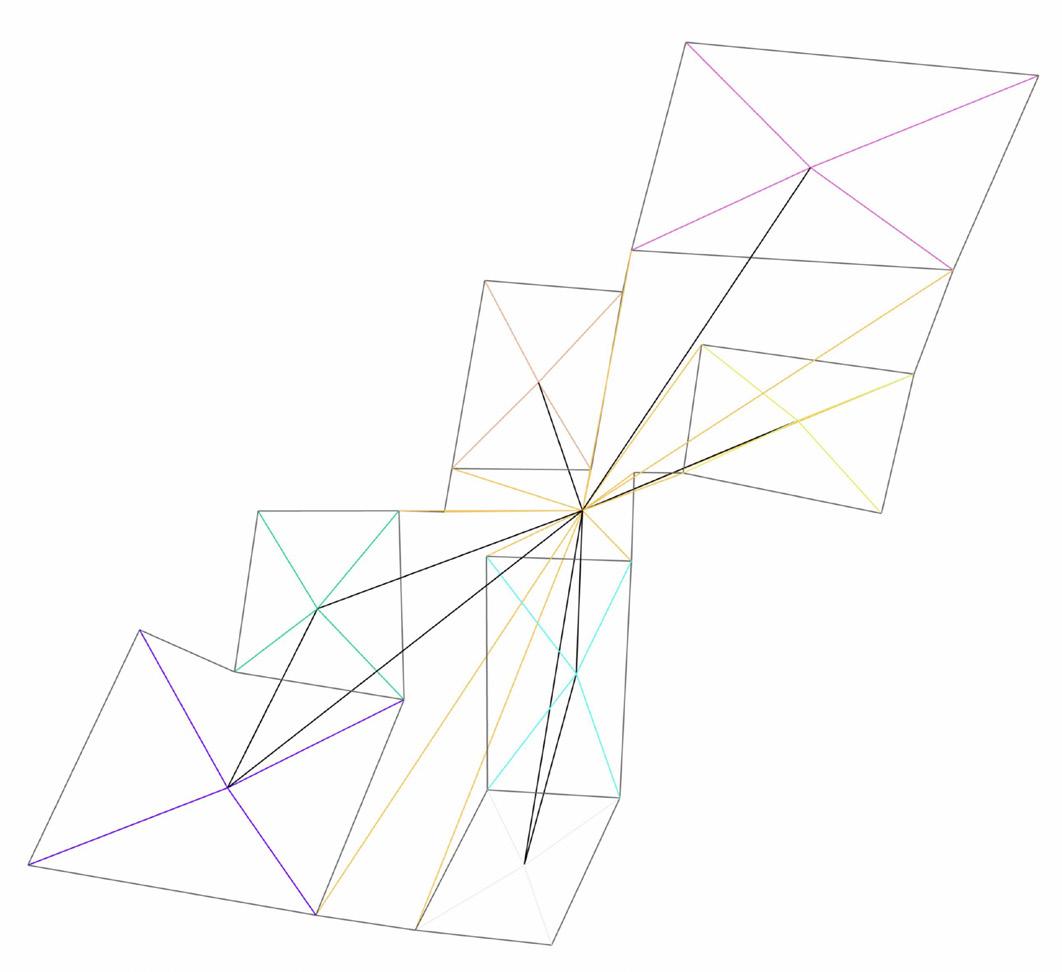
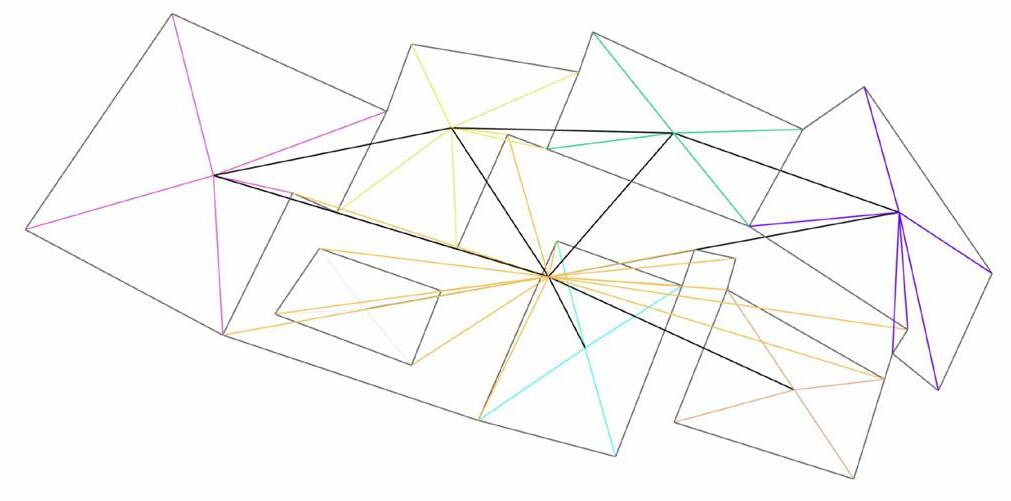
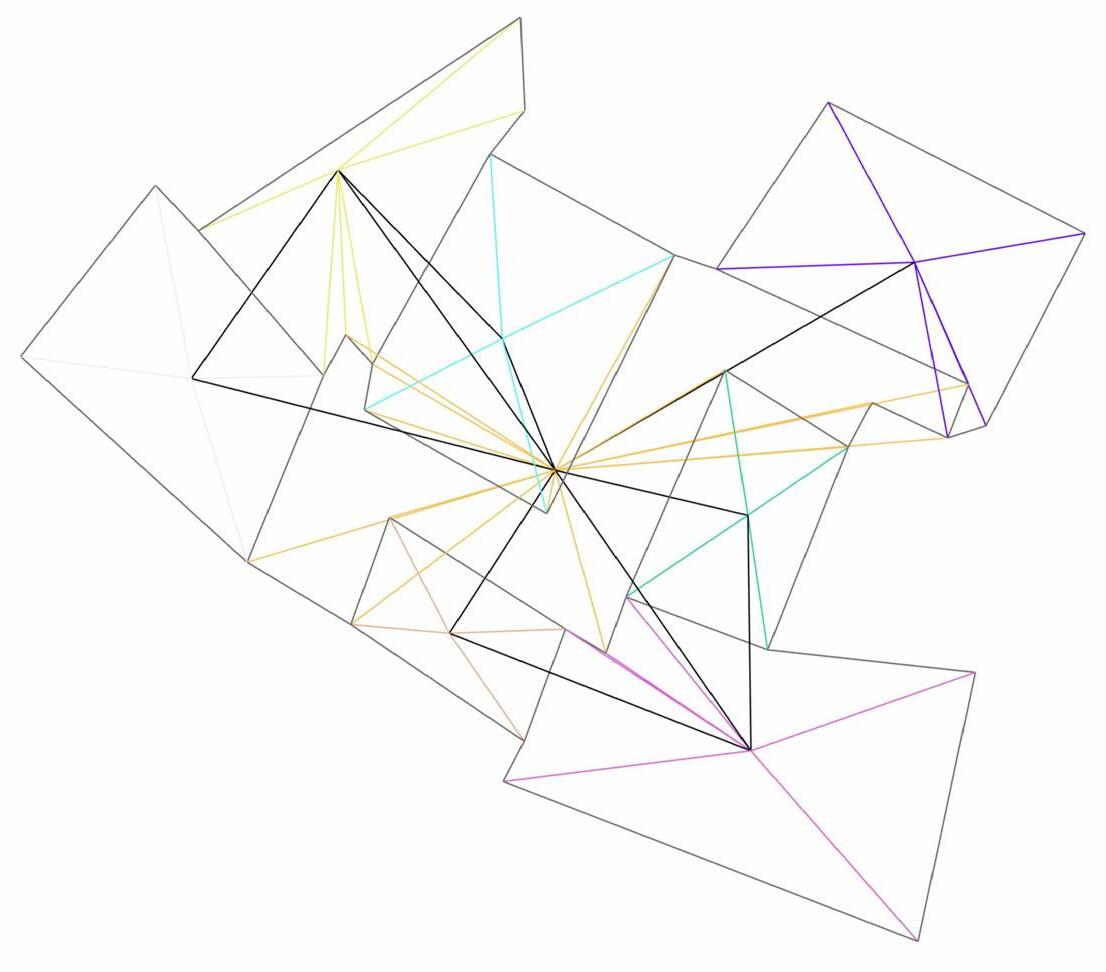
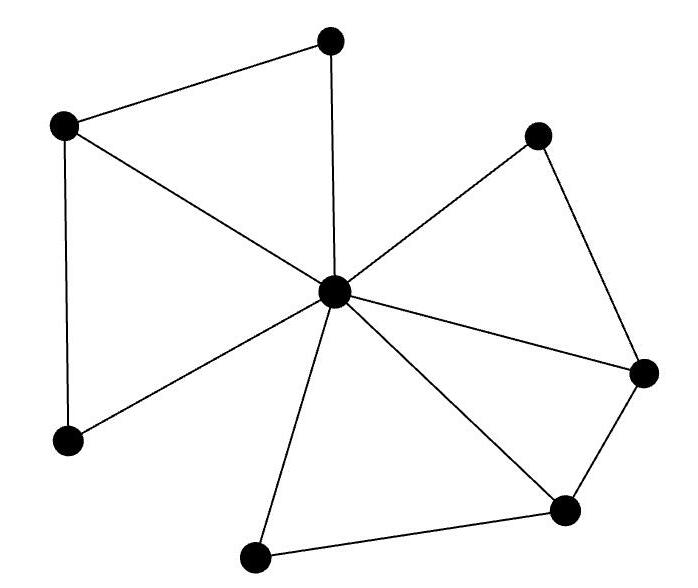
Here we use nodes and edges to depict a building information.
It includes: room label, room shape, room area, relation between rooms.
Room relation/room geometry
Nodes connections(yes/no)
Room label
Room relation/room geometry
Nodes distance/ edge length edge label
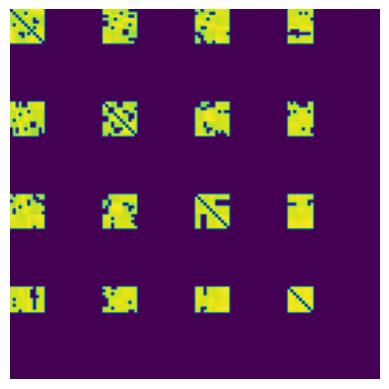
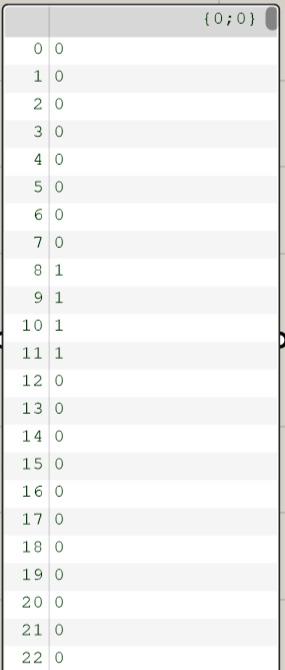
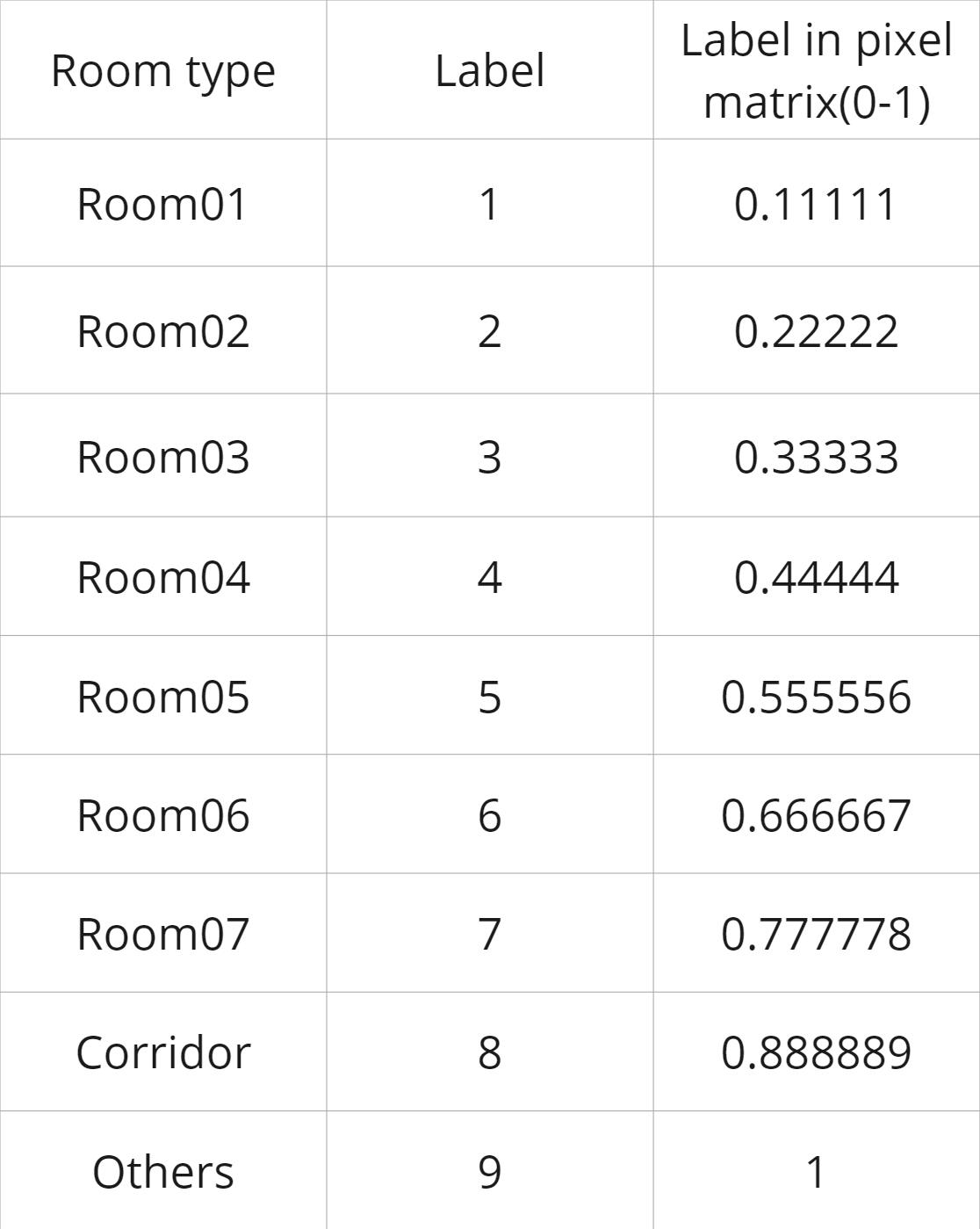
Adjacency matrix
Distance matrix
Label matrix
5.4 Got input dataset
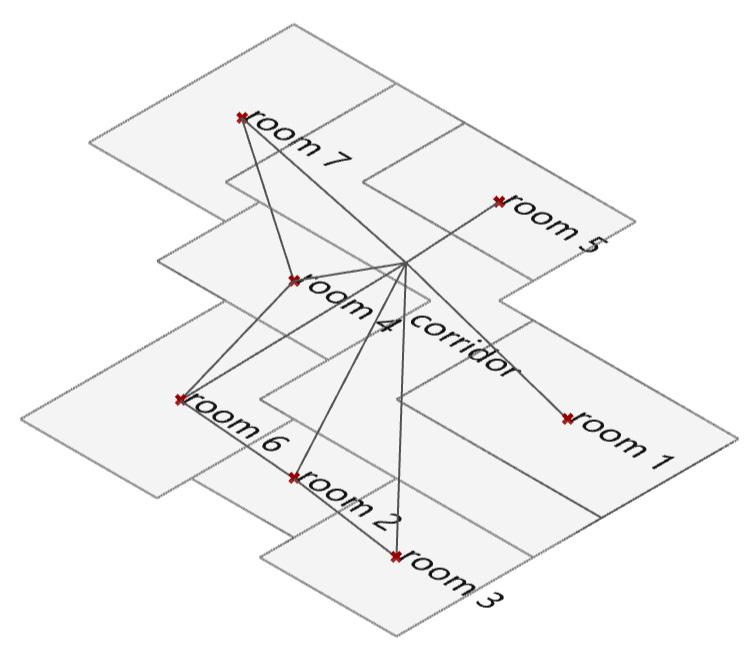
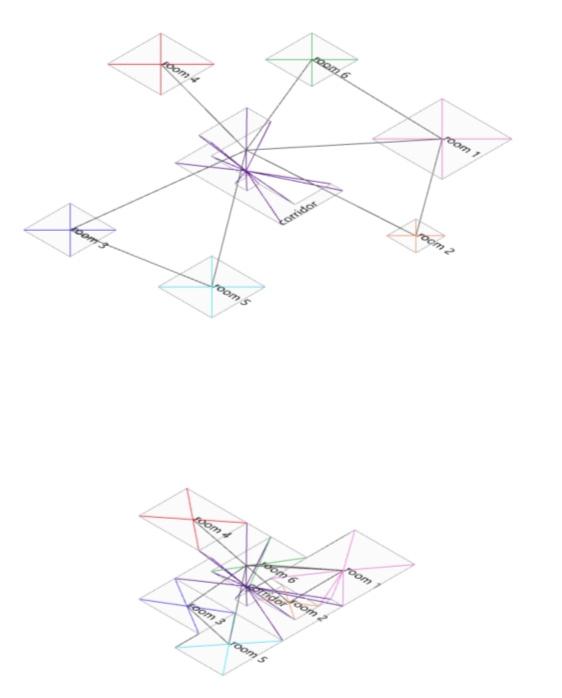
Room relationship (Output)
Room relationship (Input)
Translation of relationships between rooms: Connect scattered rooms in the input data set using the same connection method as the output data set
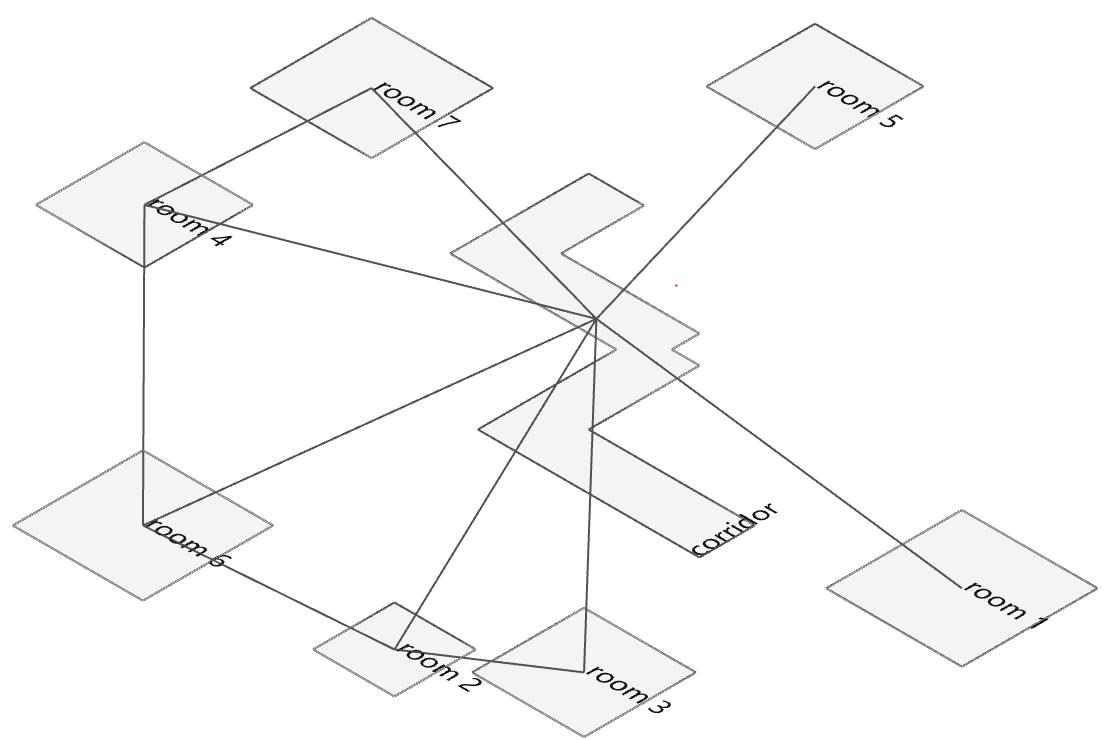
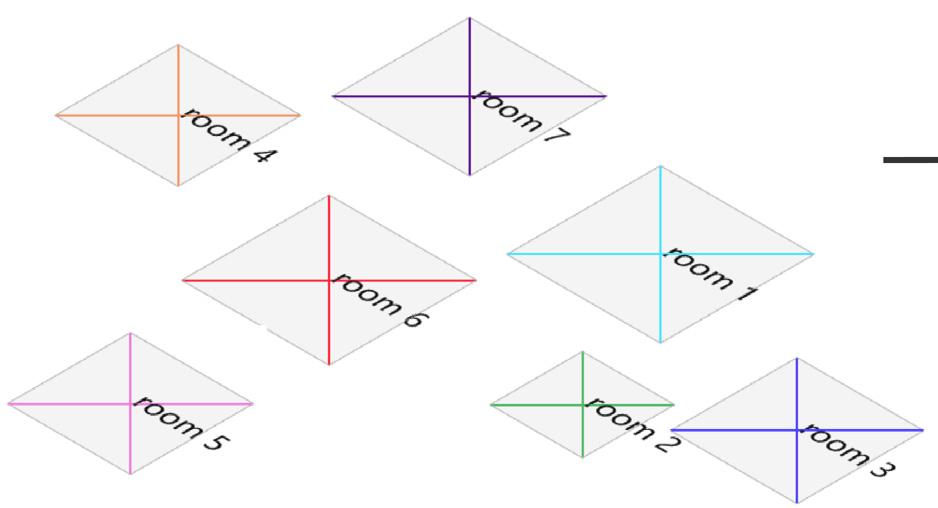
Room feature (Output)
Room feature (Input)
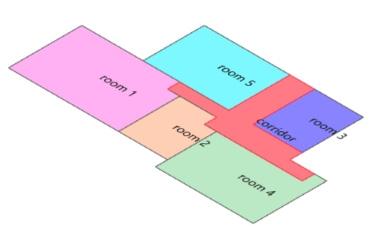
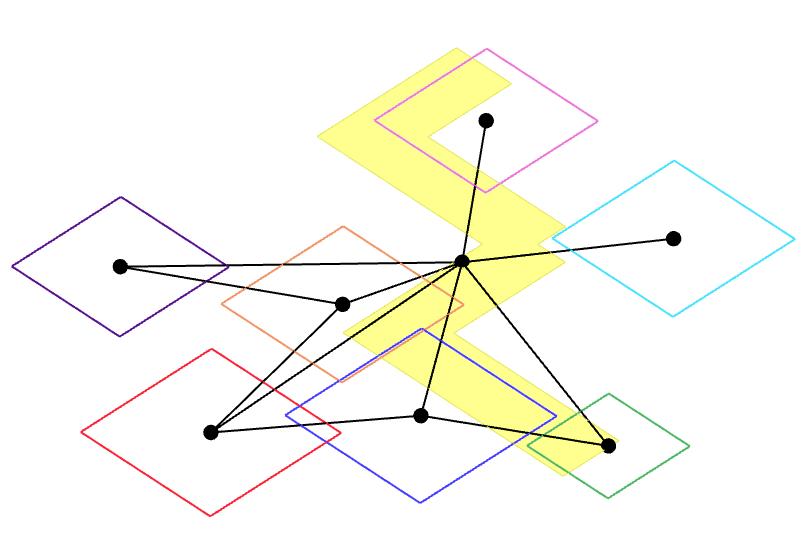
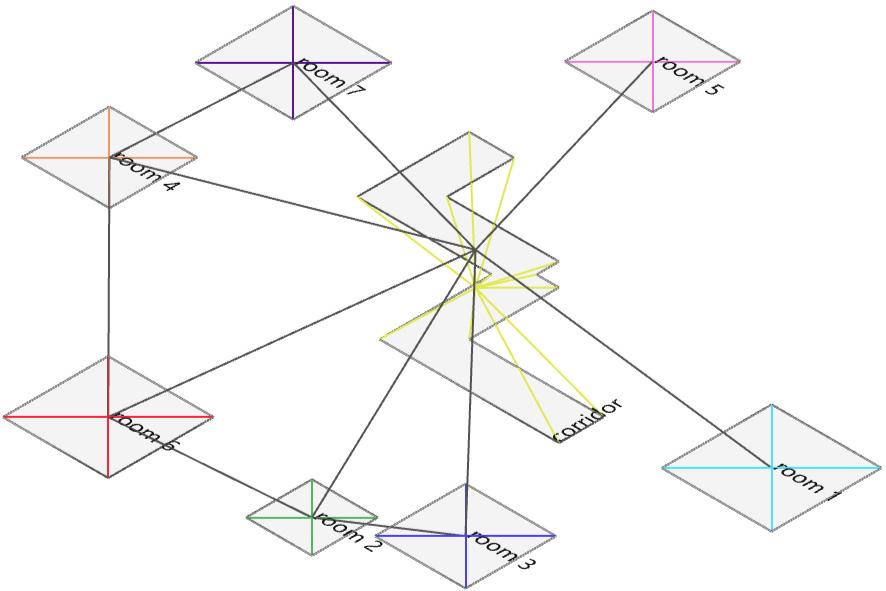
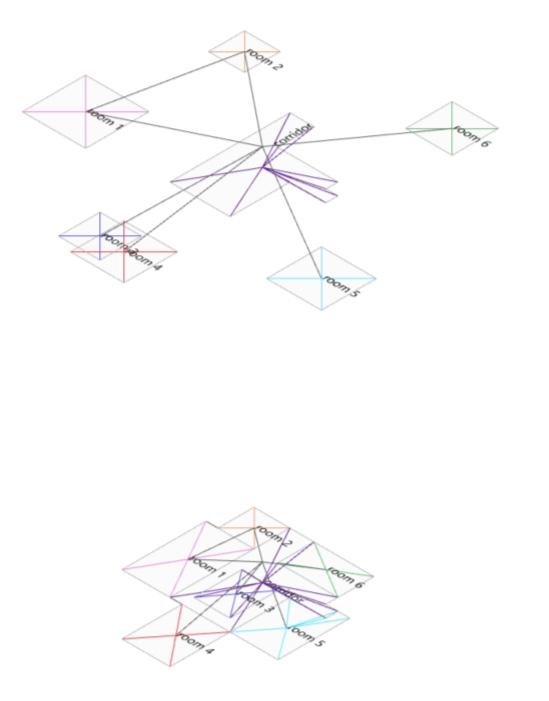
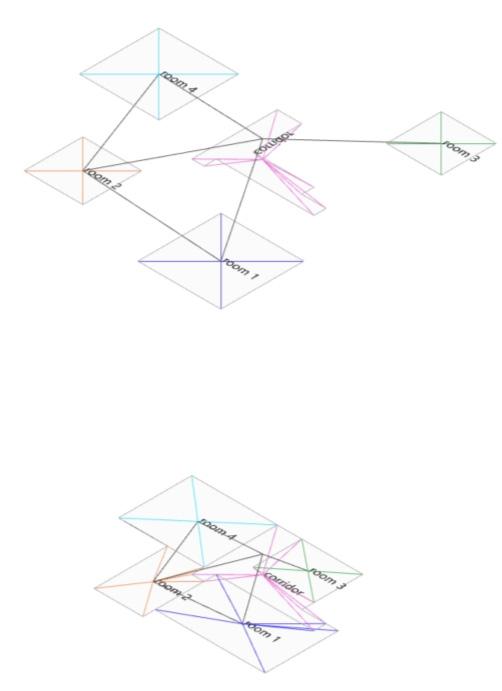
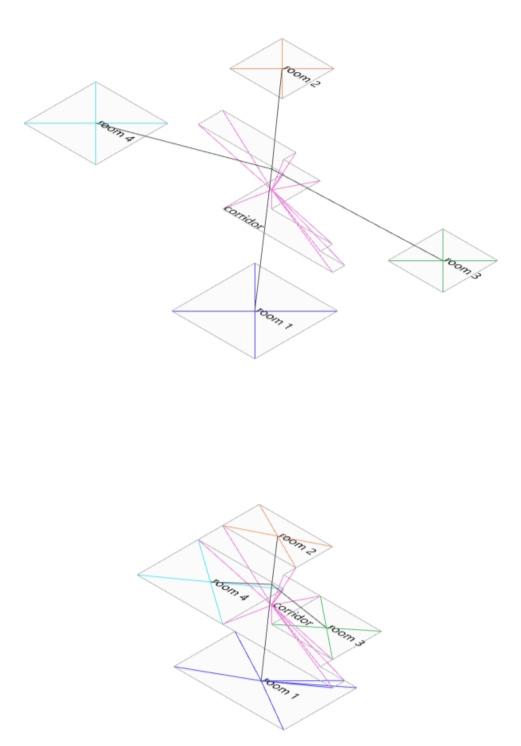
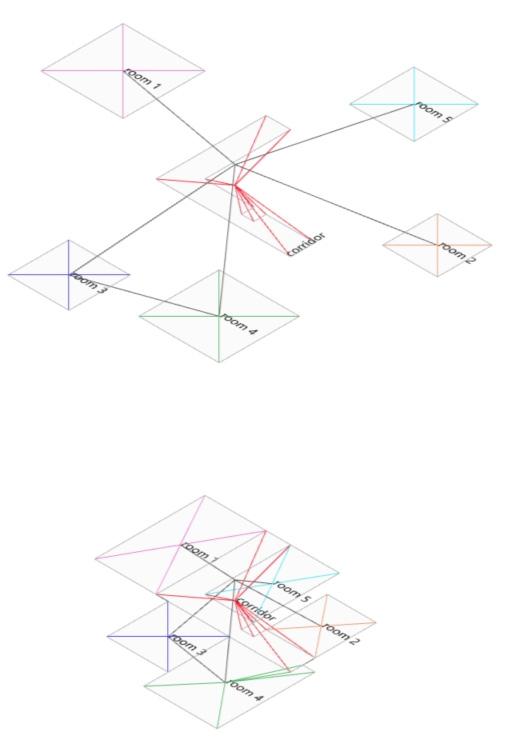
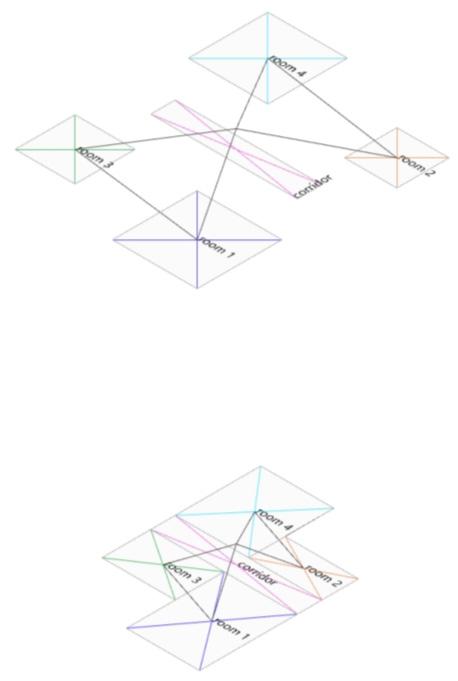
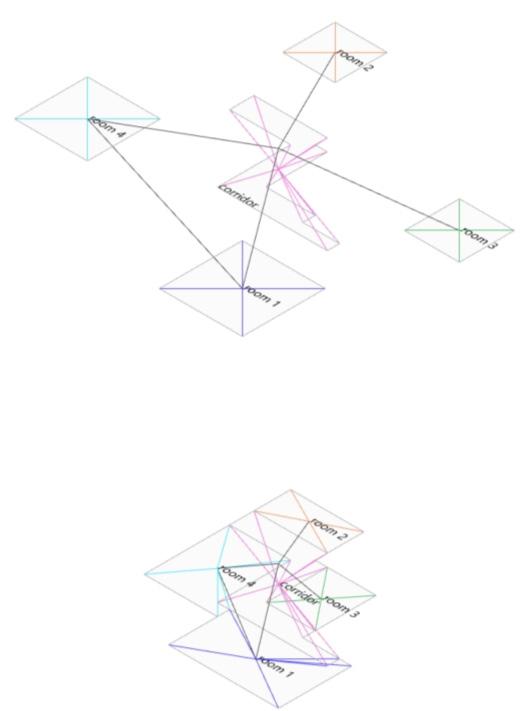
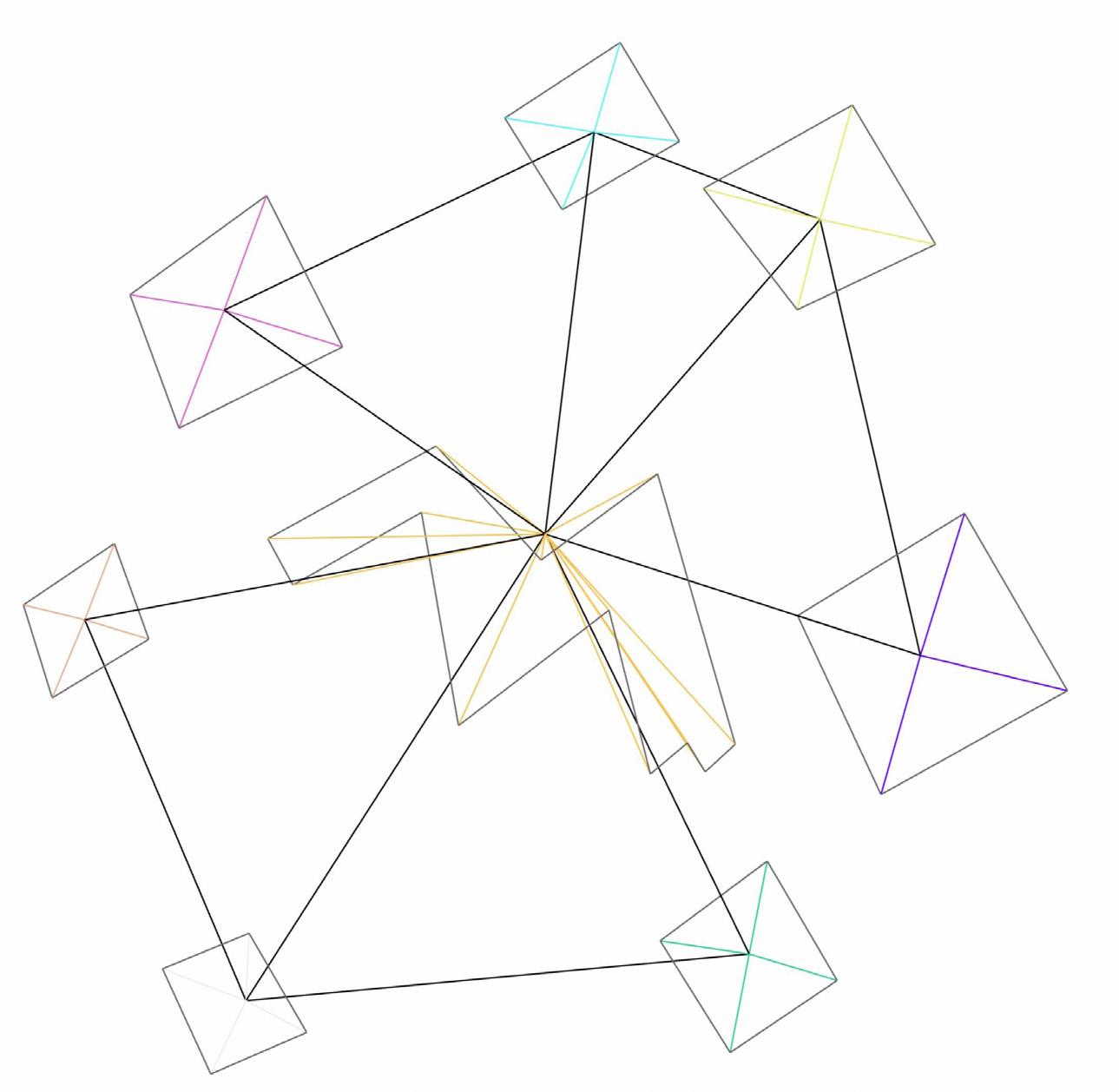
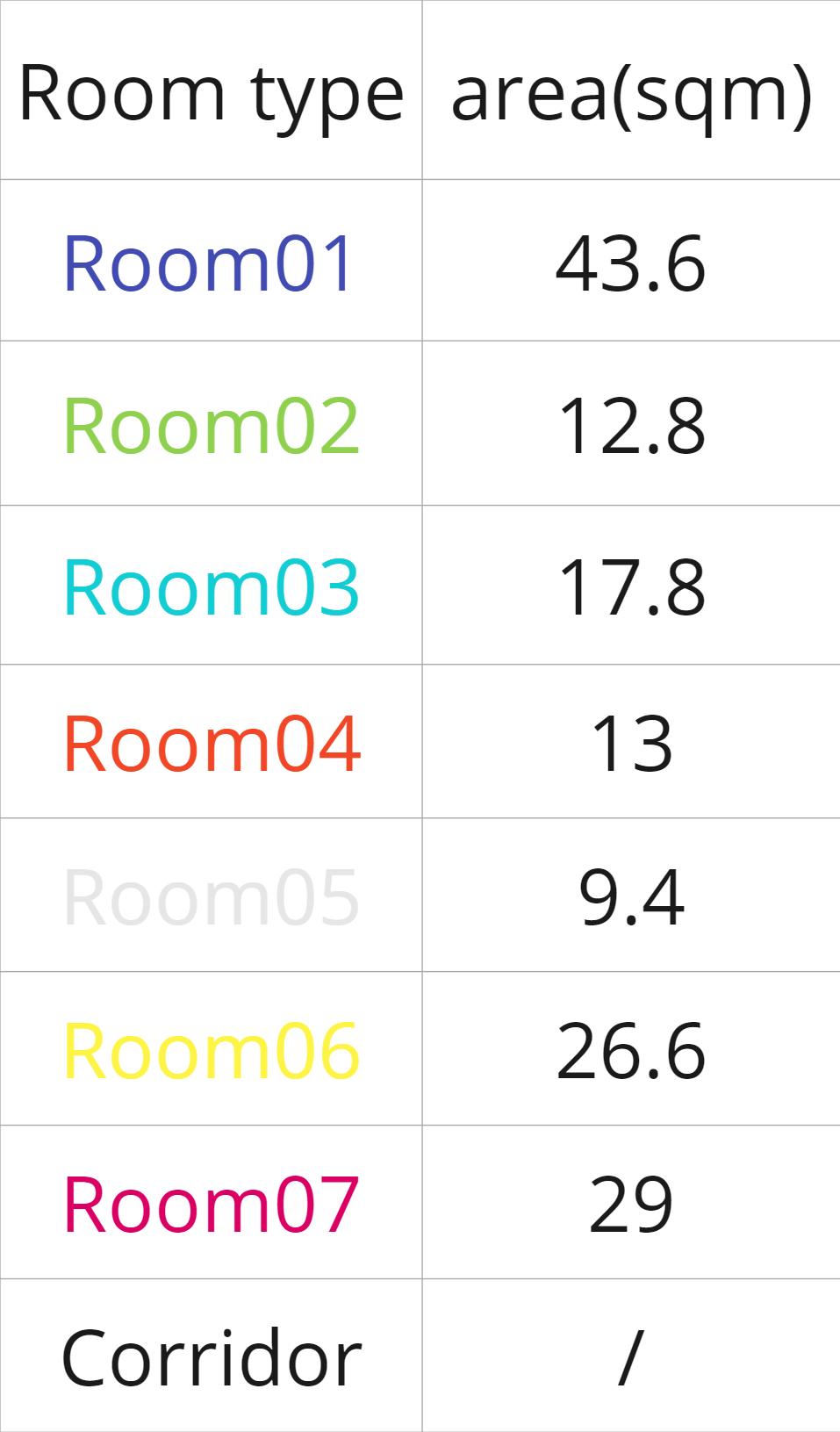
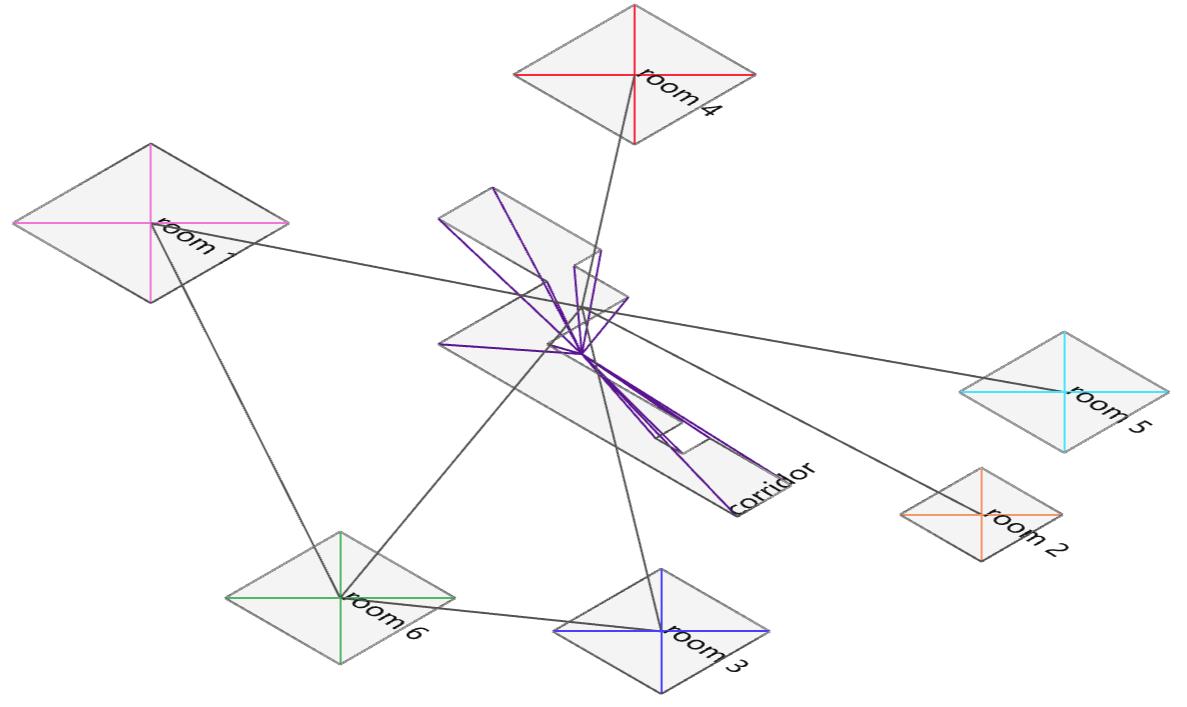
The input data set should have the same information as the output data set and establish a relationship. We can obtain information about corridor shapes, room areas, and room relationships from the thousands of generated floor plans. We re-express this information centered on the corridor: the input room is transformed into a square with the same area, the rooms are connected with the same line to express the room relationship, and the shape of the corridor is retained... From this, we get the shape of the input data set.
Room feature (Input)
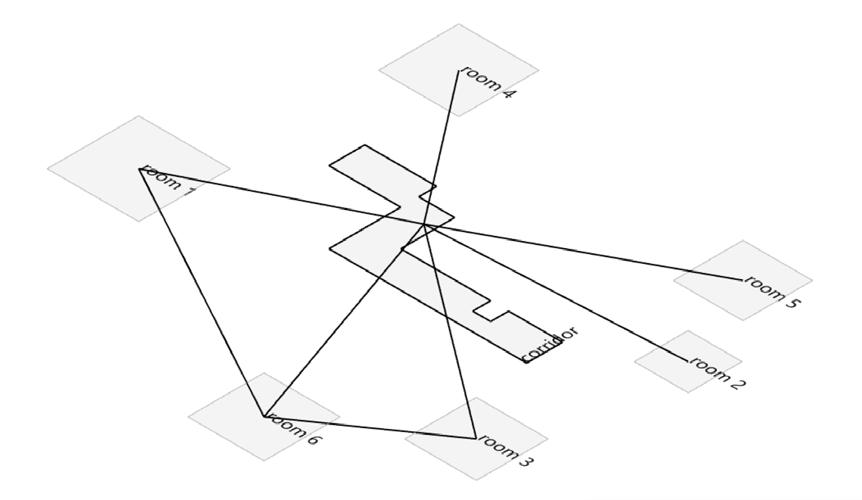
Room generation result (Kangaroo)
We get the input graph containing constraints. When we use room relationships to simulate attractions and constrain them together with kangaroo, we can see that the resulting floor plan is not perfect: rooms overlap, there are gaps between rooms, and the rooms can only remain square without the appearance of irregular shapes. possible. So this is also why it makes sense to use ML methodology in this problem.
1. Draw a reference line for corridor
2. Define the function and area you want
room01: 28sqm
room02: 7sqm
room03: 13sqm
room04: 18sqm
room05: 16sqm
room06: 14sqm
constrains representation
3. Define the relation of these functions if you need
This part shows how to covert the use input information to the input geometry which we can deal with. When we get the geometry representation of these constrains, we will use the same way we mentiond before to abstract the input to these ML-readable image.
5.6 Dataset Variation
Around 2000 pairs of data with different area, rooms and configuration.
# 06 Training
Prediction results/ Reconstruction/ Problems
Training
6.2 Reconstruction Result
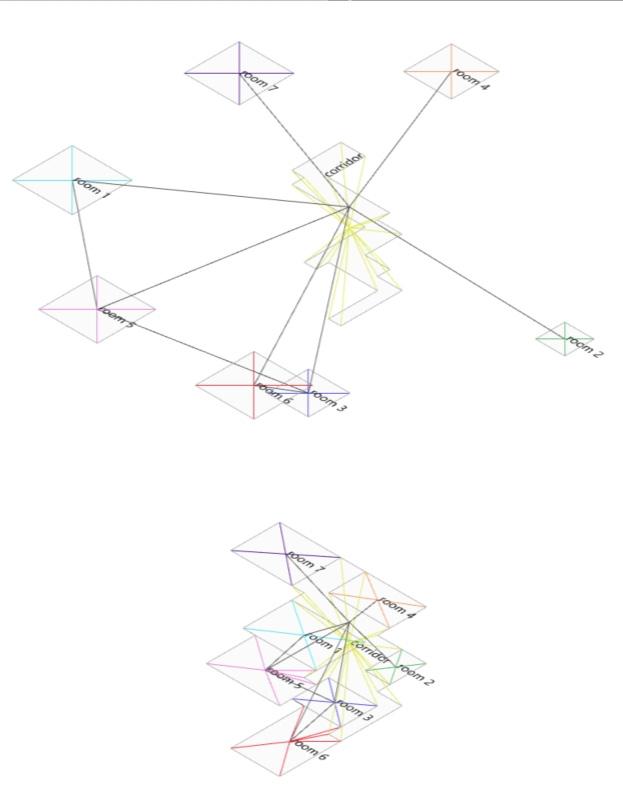
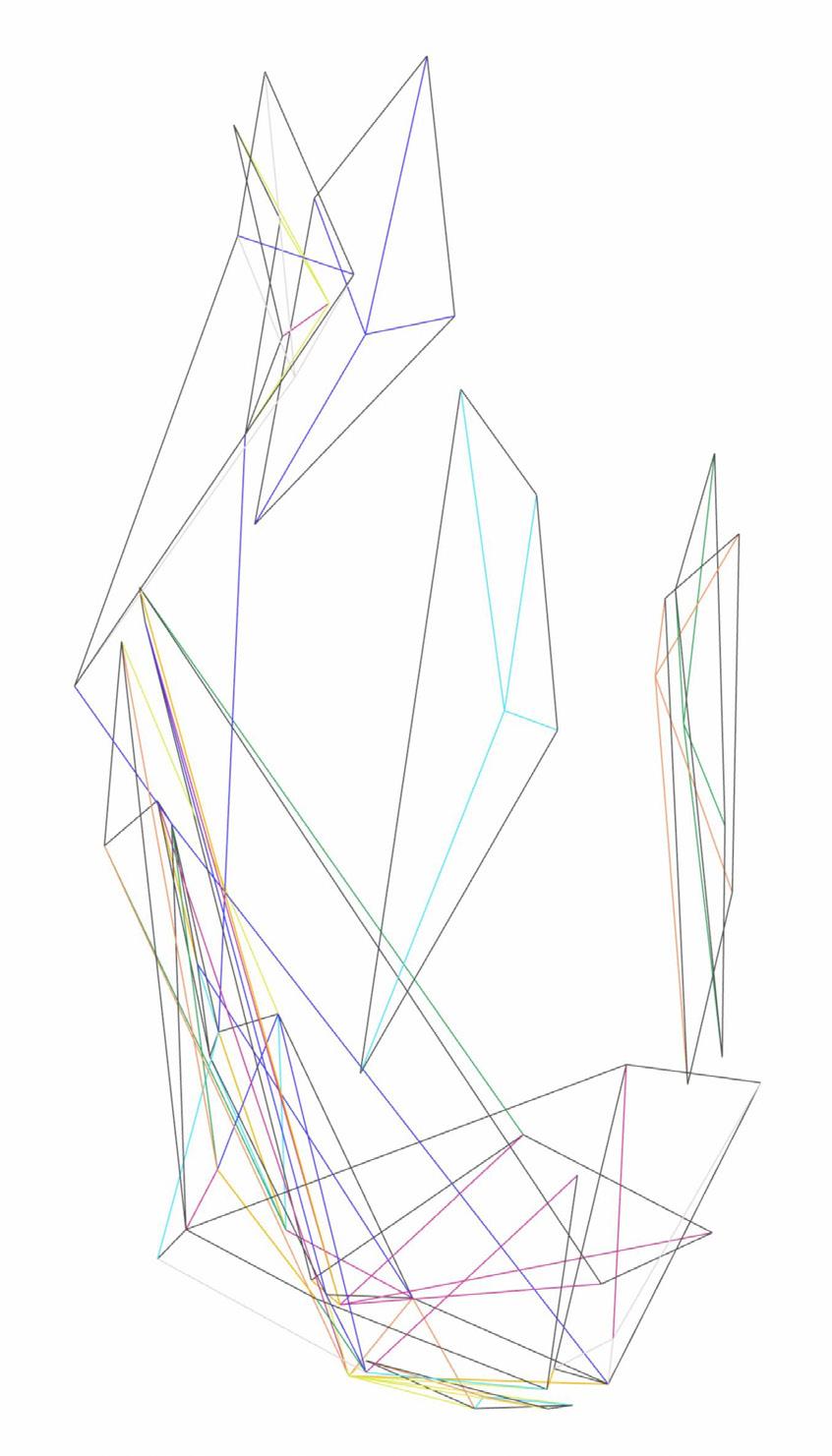
Most of generation result has distortion.
This part shows the reconstruction result in grasshopper. After training for about 400,000 steps, we did not get a good result.
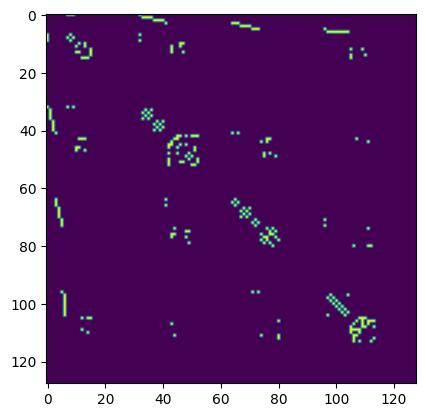
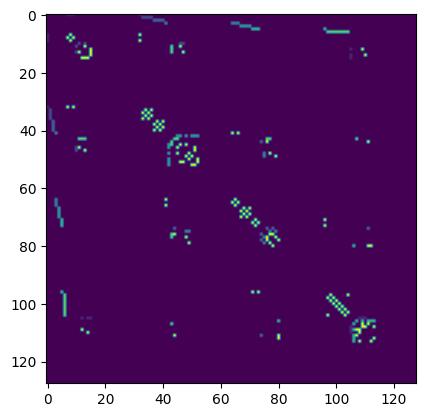
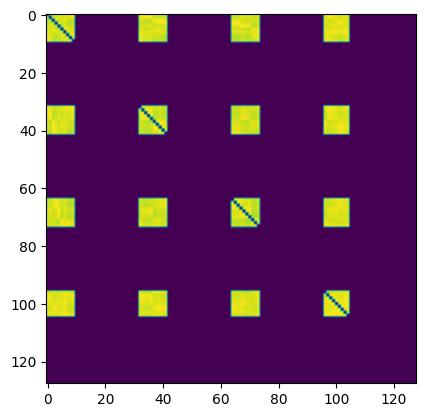
Almost most of the reconstruction results have large distortions. They do not form a continuous flat floor plan. This result is obviously unusable. But by observing the results, we can know that the contents of the adjacency matrix and the label matrix are better predicted to a certain extent, They conform to the rule of appearing in pairs during input. And from GH we can recognize that different colors are scattered together.
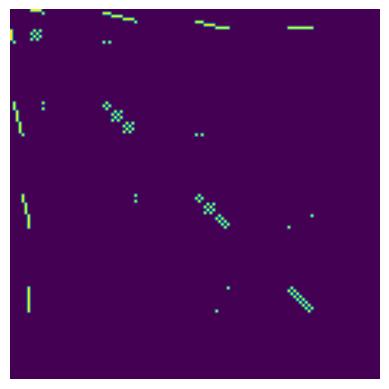
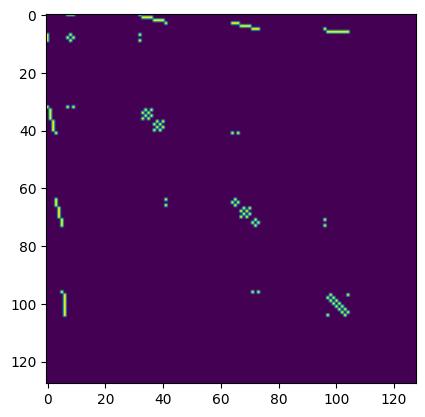
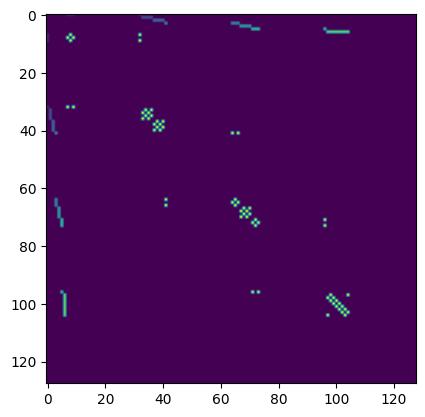
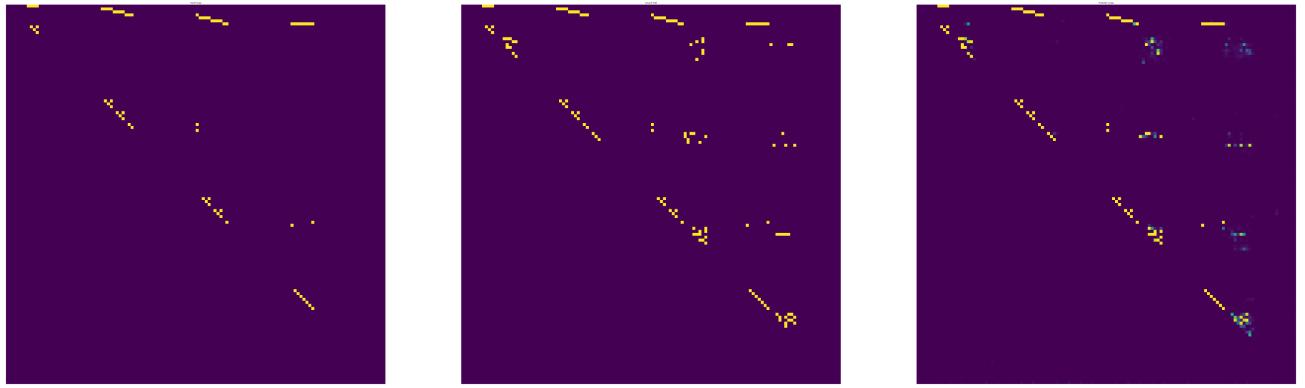
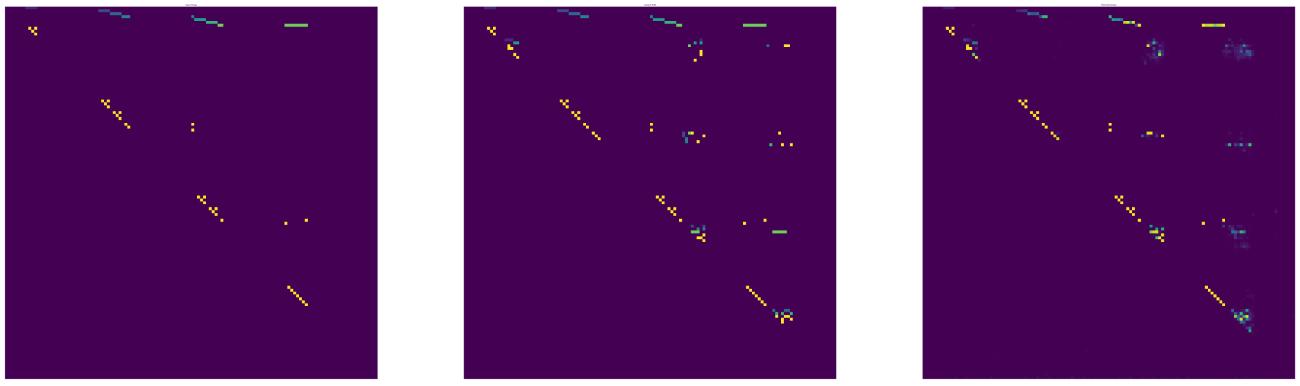
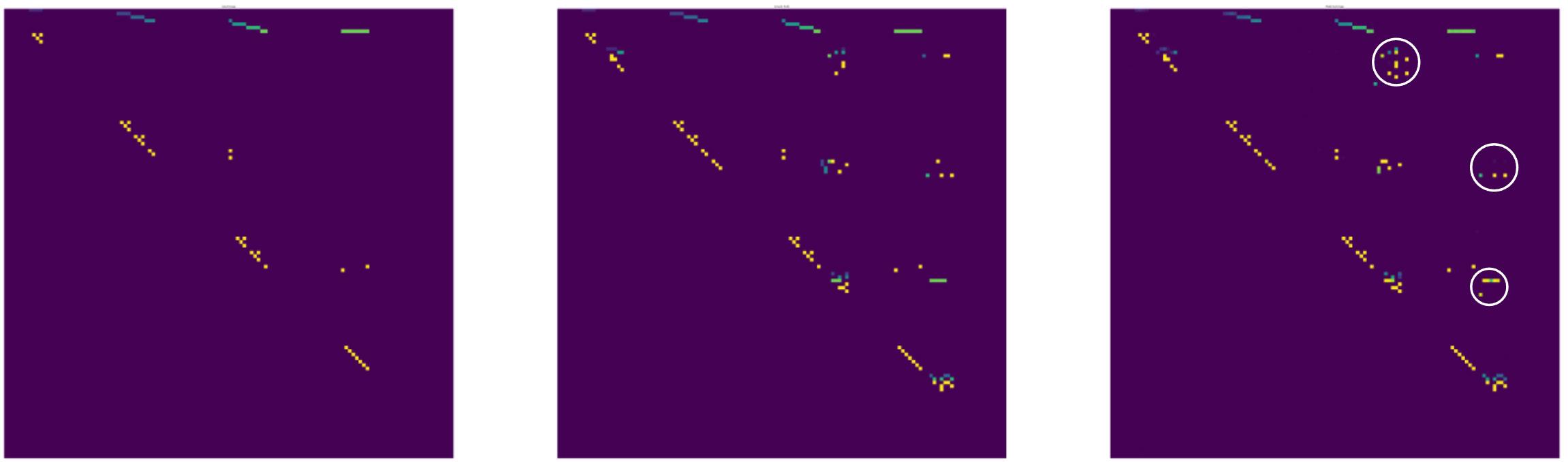
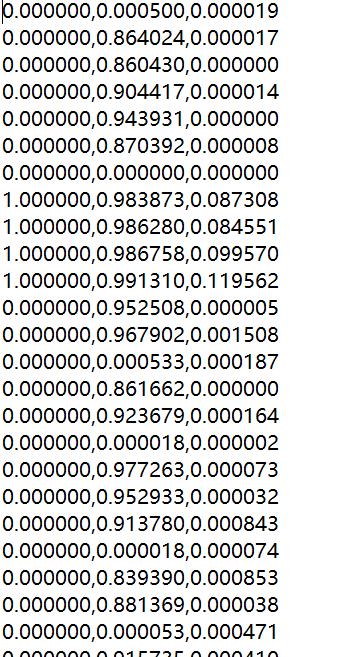
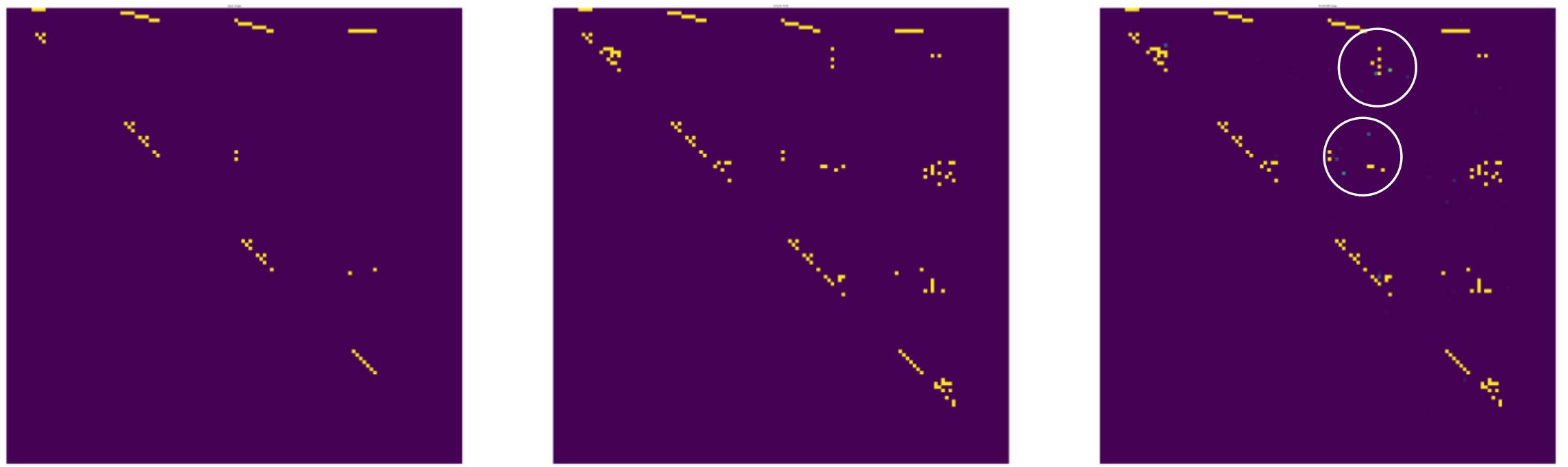
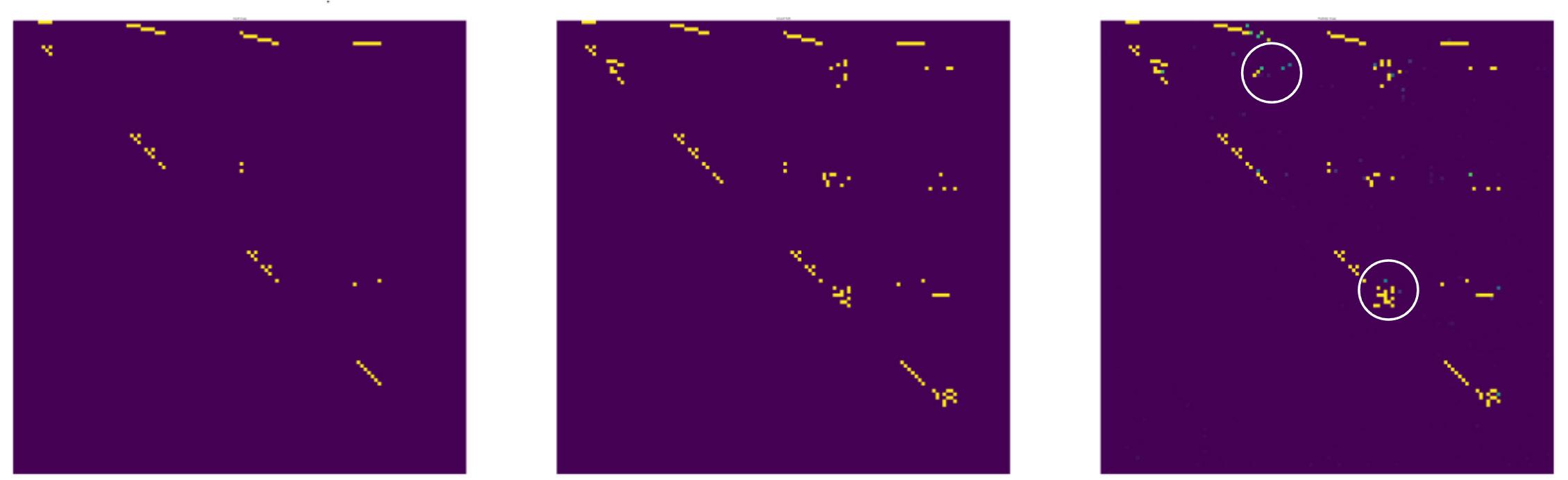
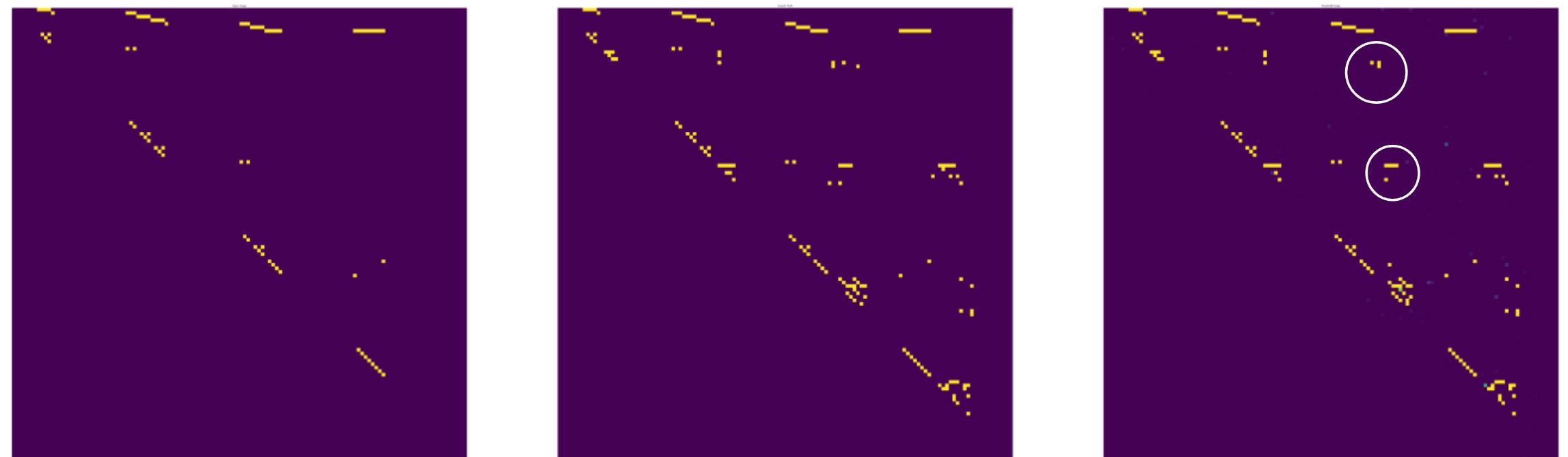
Therefore, we further explore the reasons why this huge distortion occurs. We tried to plot some predictions and compare them with the ground truth.
In most results, the adjacency matrix and label matrix have fewer errors. But in the distance matrix, some pixels are missing, and a large number of pixels have colors different from the ground truth, which indicates that there is an error in predicting the length of this edge. This is why every node seems to be connected in grasshopper, but a reasonable plane cannot be restored.
So in the next step, we doubled the training time, hoping to get better results.
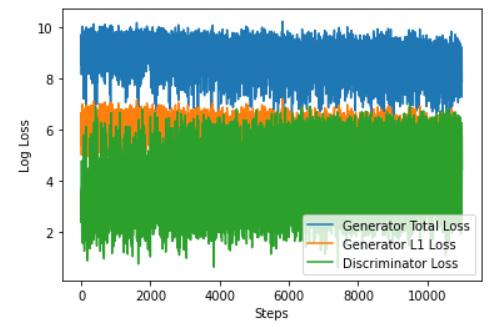
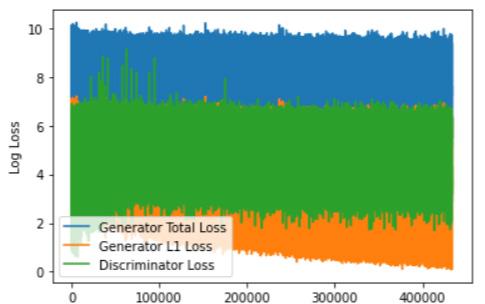
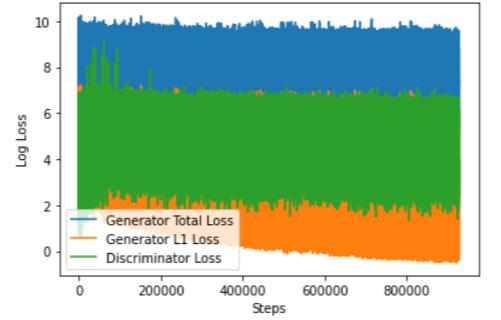
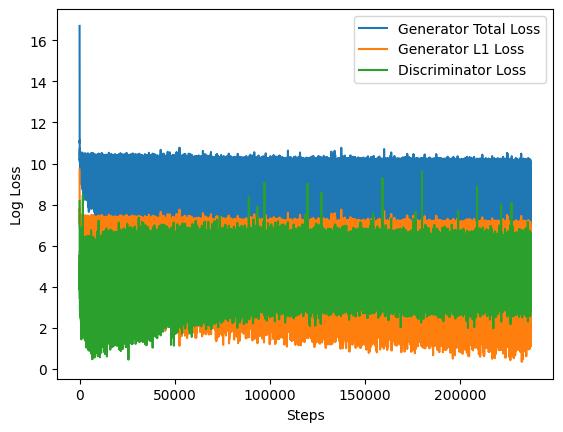
6.3 2nd Training result_988,999 steps
Step:988999
Generator loss: 7.494118938771732
Generator l1 loss: 3.8295014311102595
Discriminator loss: 4.693514201845212
In the second training, we trained approximately 988,999 steps. Comparing the data at the beginning of training, we can see that Generation loss and Generation I1 loss continue to decrease, and Discriminator loss continues to increase, which shows that we are moving in the right direction.
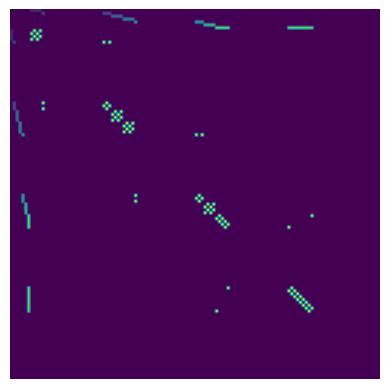
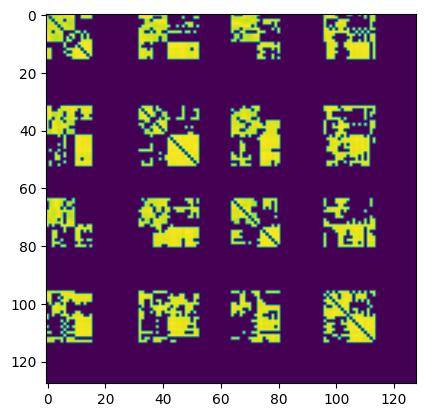
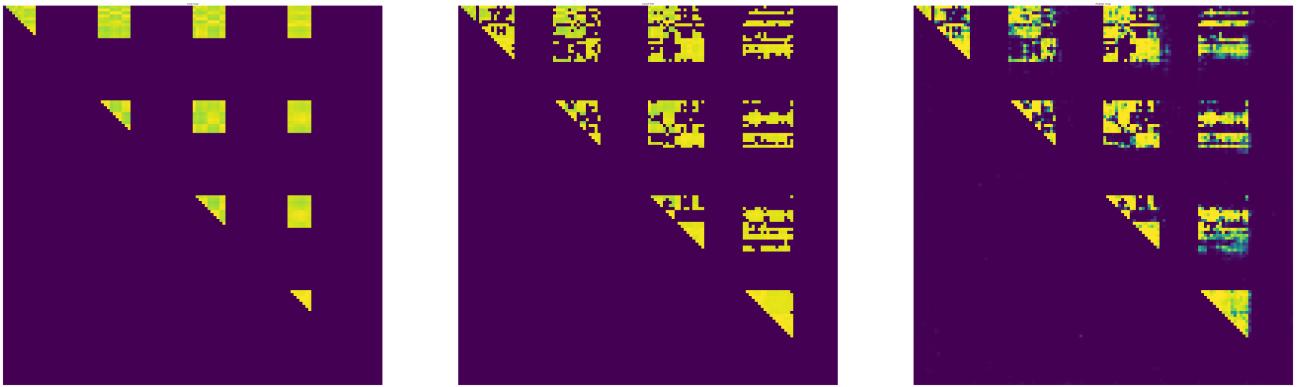
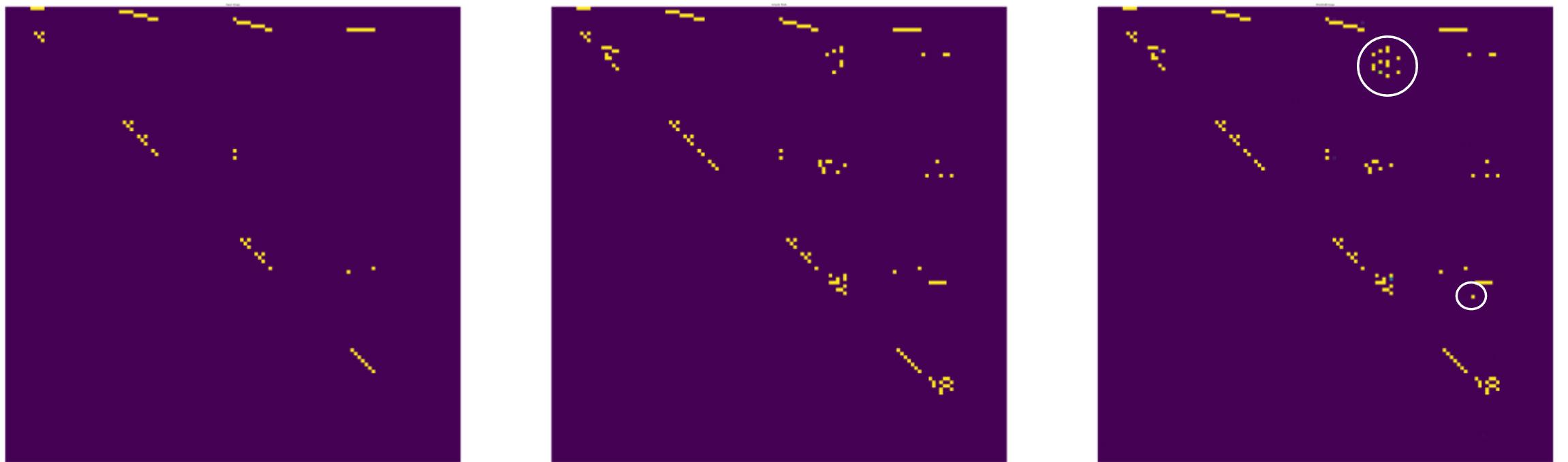
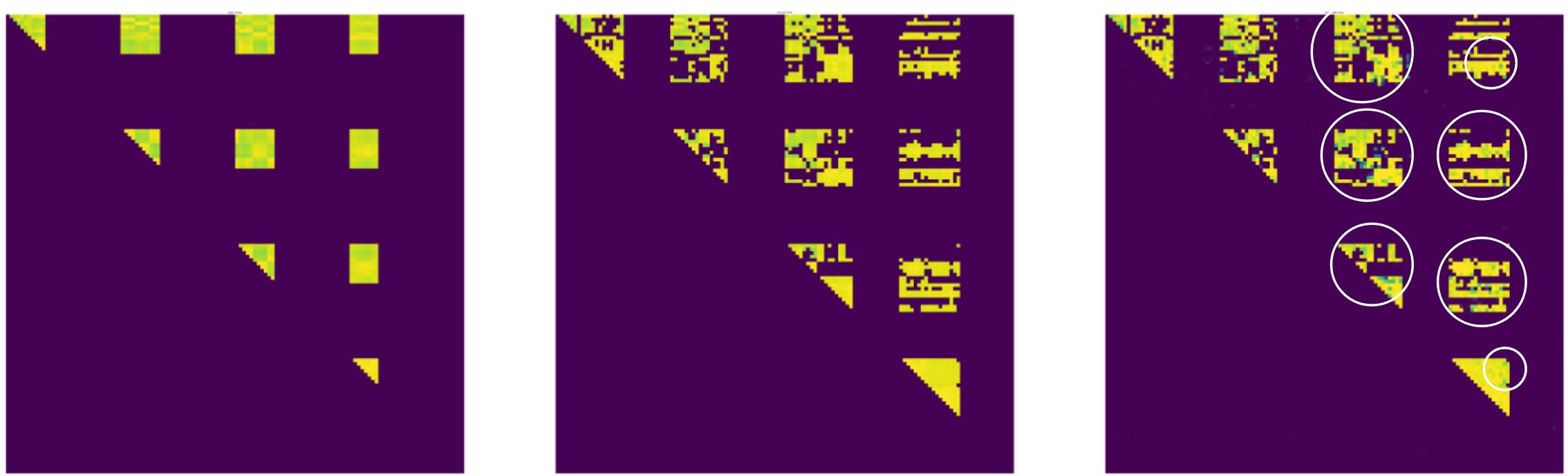
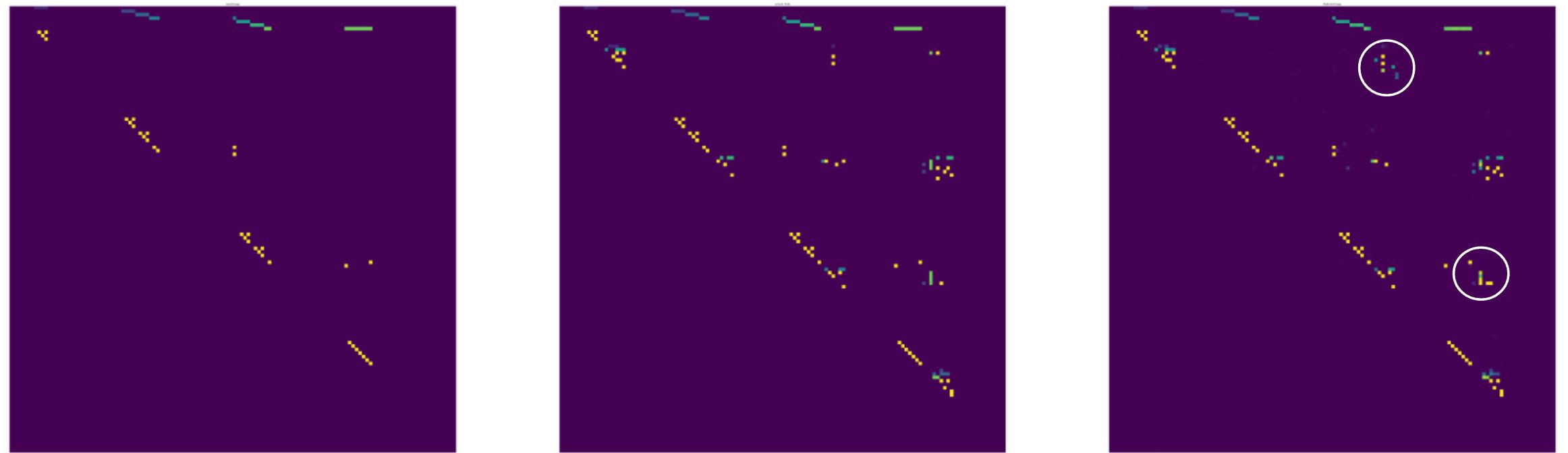
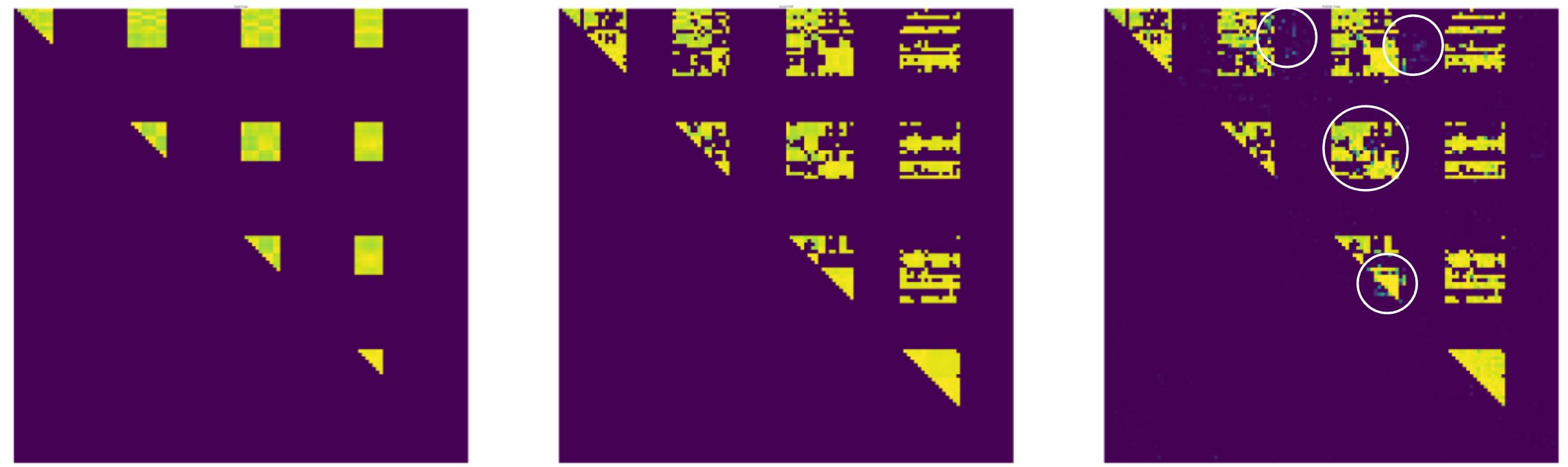
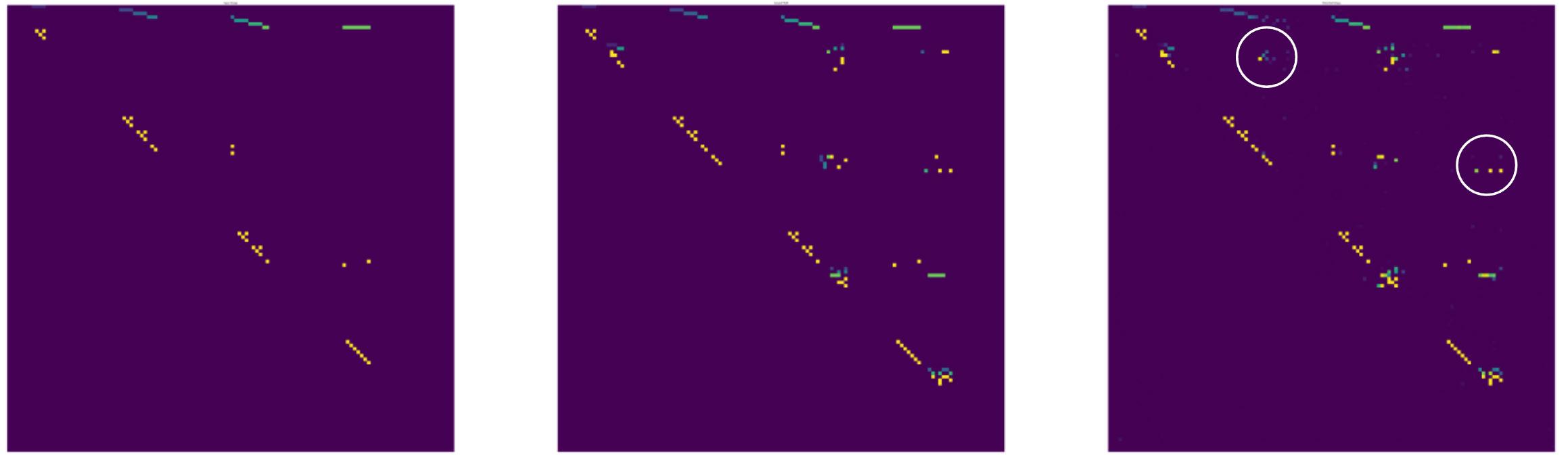
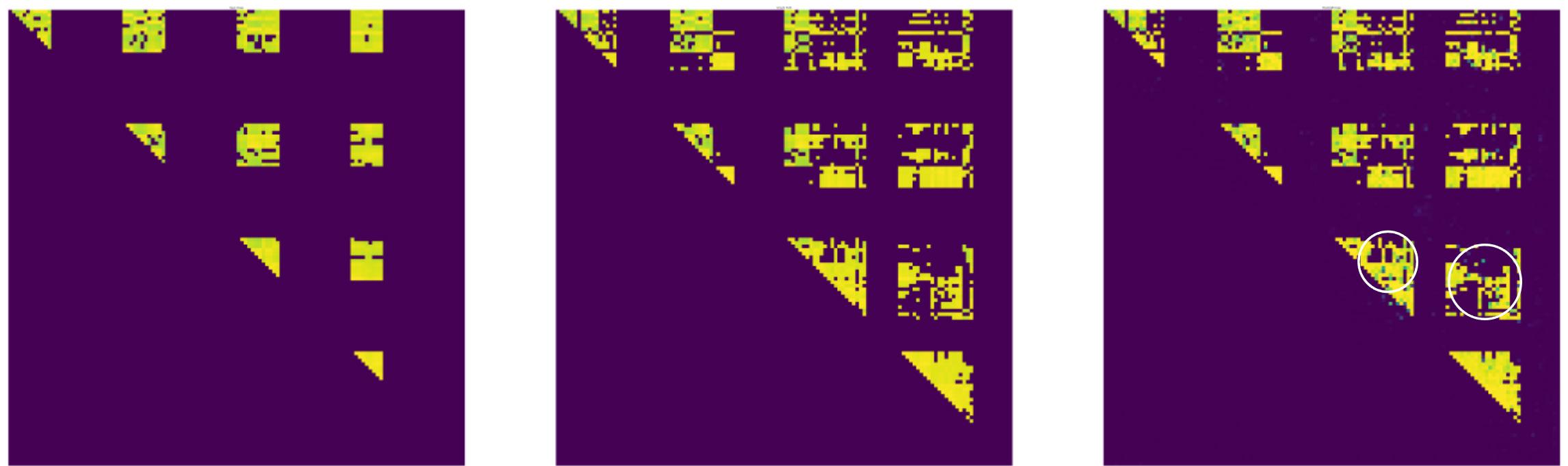
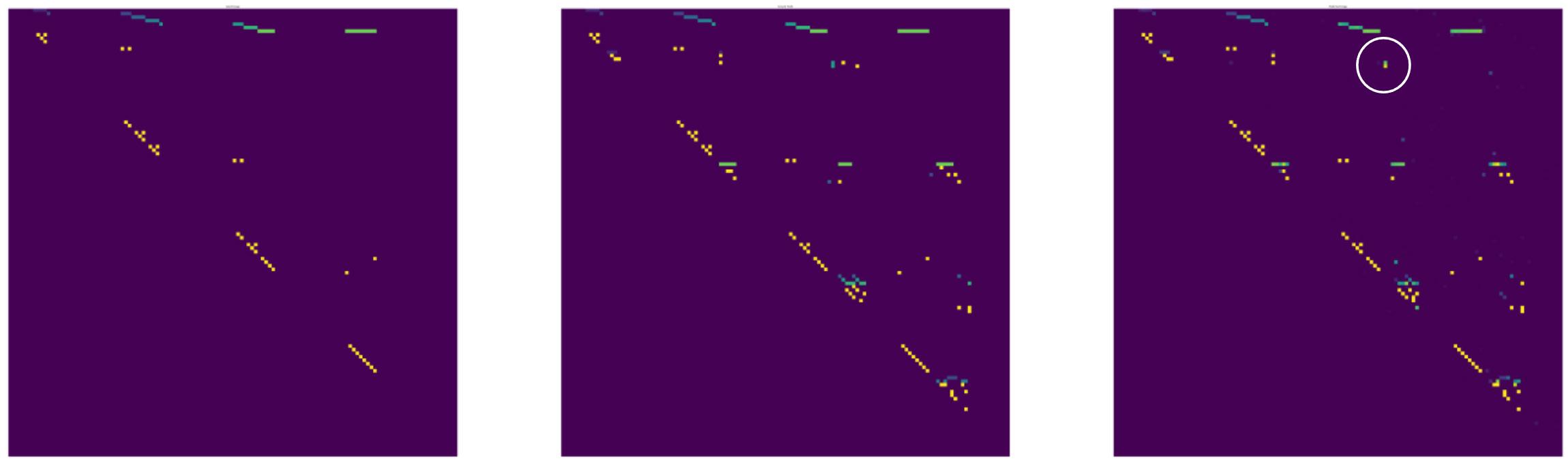
When we plot the prediction results again, we can see that the adjacency matrix and label matrix still have relatively small errors. The error in the distance matrix prediction results is also significantly reduced. Most of the pixels have the correct color, with only two obvious errors.
6.4 Reconstruction Result
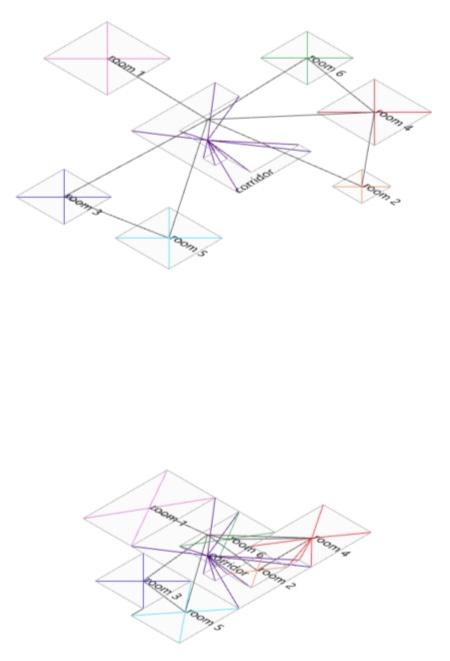
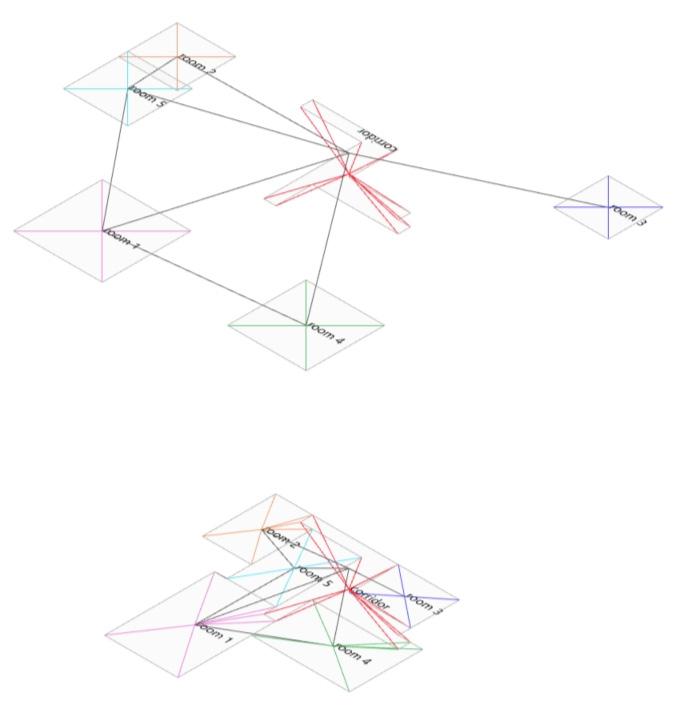
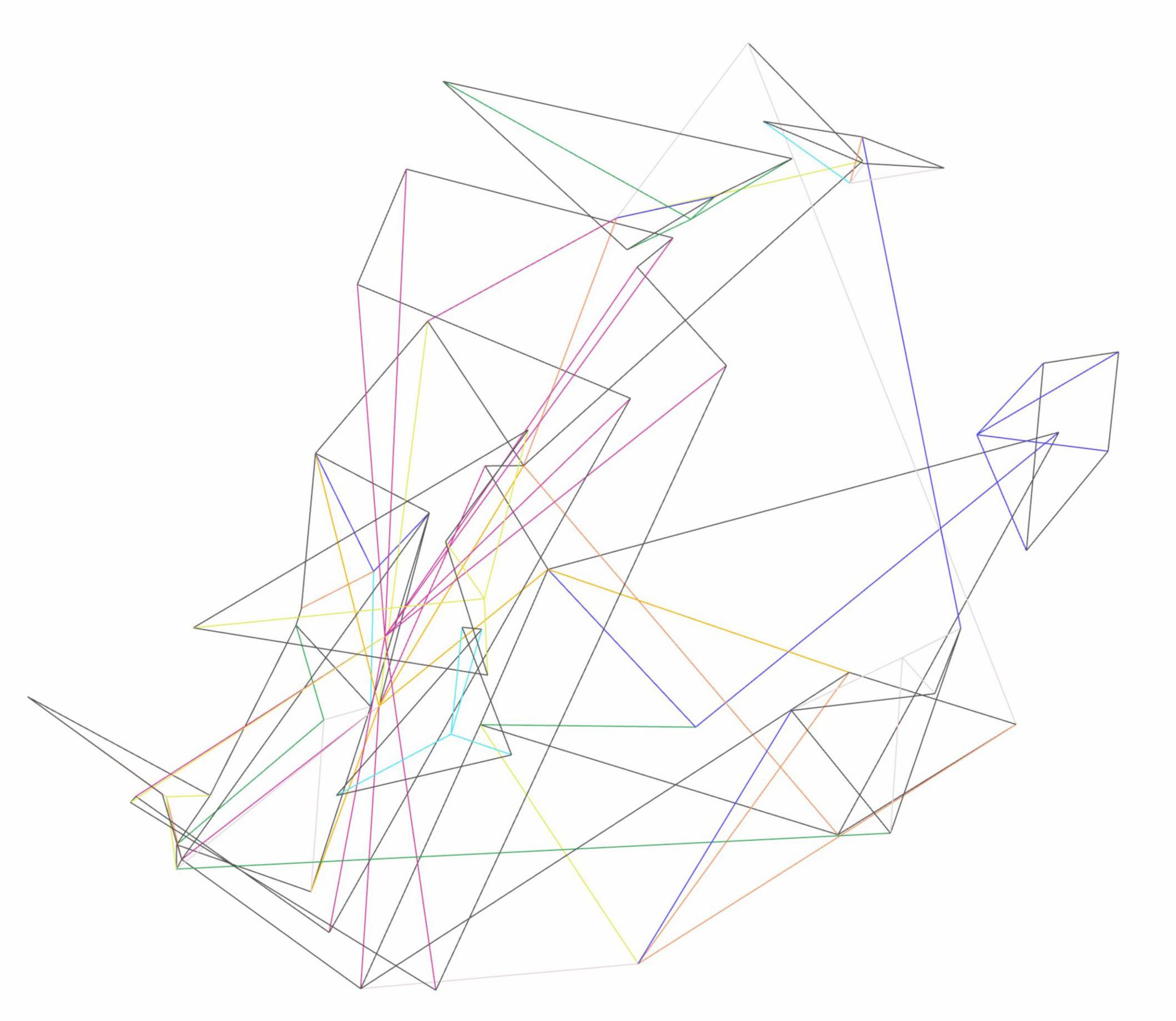
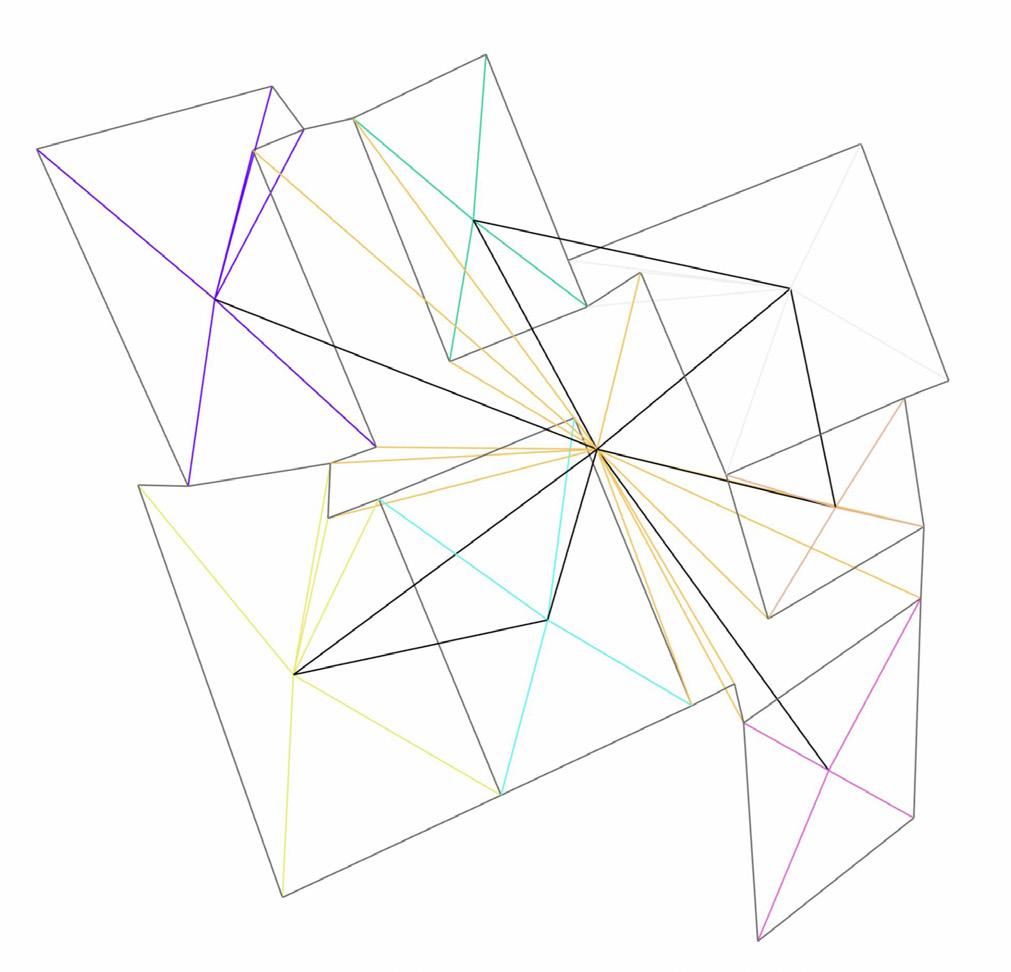
Generation result still has distortion, but work better than before.
When we reconstruct the geometry in Grasshopper, we can clearly see that the prediction results this time have significantly improved. The result though is still not a flat floor plan and there is still a distortion in the shape of the room within it. But the logic of their layout is already discernible in these floor plans. Colored edges are distributed throughout the interior of each room, and there is no color confusion. The connection between the rooms has also been restored very well.
Reconstruction Result
Generation result still has distortion, but work better than before.
Input from prediction result. User input
Output from prediction result. reference line
Room area
Room relationships
Next we take one of the results as an example. As we mentioned before, the prediction results of Pix2Pix are pairs of images. In addition to the results representing the floor plan, the other one represents the prediction of random input constrain. We also restored the input shape in Grasshopper and disassembled the user's input conditions, including reference lines, room area, and room relationships. We then compare whether these conditions still exist in the generated building plans. The comparison results show that except for the large deviation in the area of Room01, the predictions of other rooms, corridors, and room relationships are relatively accurate.
Conclusions
Conclusion/ Limitation/ Potential and Future work
Conclusions
The method used in this study allows ML to accurately capture the shape relationships of the building plan, such as the foot points of the room, the center point of the room and the edges which is necessary to form the shape of the room. Theoretically, most linear geometric shapes can be expressed by the nodes and edges on their boundary. Therefore, compared with methods in some previous studies, the model after deep training should have the ability to accurately reconstruct complex spaces.
These multiple channels in Pix2Pix model allow us to learn more layers of information. In this study, we added a new layer of channel that can identify room labels based on adjacency matrix theory. This study verified its feasibility. This also means that it is possible to add more layers of information to the learning object to generate more complex models.
Input constrain
Whether it is a 2D shape or a 3D shape, the basic principle is to find a way to describe the geometric properties of the shape. As mentioned above, this methodology describes an architectural plane by extracting points and edges of geometric shapes and adding different layers of information to the edges. Let ML understand and learn this shape. Theoretically, this method is also suitable for the reconstruction of 3D space. Although this article does not continue to delve into this, it is worth noting: for 3D generation, perhaps we need to use the pix2pix HD model, which allows up to 1024 feature nodes to depict buildings. Of course, 3D space generation is more complex than 2D. Whether the coding method needs to be modified requires further study. Go back to 3D
original building
embed relation
Limitation
1, Pix2pix HD Model can deal with the image size of 1024 dpi. This generator cannot generate too big or too complex 3D buildings which has more than 1024 feature nodes.
2, This method has relatively high requirements for the depth of model training. In the adjacency matrix, a small pixel error will cause a relatively large deviation. And obtaining an accurate distance matrix often takes longer to learn.
Potential & Future work
1, The previous research has shown that this method is feasible. Next, we can increase the training time or find a dataset that is more consistent with the actual situation and retrain the model to make the results more ideal.
2, Not only for the floor plan. How to use this method in the generation of 3D space requires further exploration. 3, It allows us to add more channels for different information. So, change or add more different constraints( sun hours, surrounding), let users control or interact with generator more intelligent.
1. Hao Zheng, Philip F.Yuan, A generative architectural and urban design method through artificial neural networks. Building and Environment, Volume 205, 2021, 108178, ISSN 0360-1323, https://doi.org/10.1016/ j.buildenv.2021.108178.
2. Zhuang, Xinwei & Ju, Yi & Yang, Allen & Caldas, Luisa. (2023). Synthesis and generation for 3D architecture volume with generative modeling. International Journal of Architectural Computing. 21. 147807712311682. 10.1177/14780771231168233.
3. Zhong, Ximing; Fricker, Pia; Yu, Fujia; Tan, Chuheng; Pan, Yuzhe, A Discussion on an Urban Layout Workflow Utilizing Generative Adversarial Network (GAN) - With a focus on automatized labeling and dataset acquisition. CumInCAD, 2022.
5. Ondřej Veselý, Building massing generation using GAN trained on Dutch 3D city models, 2022. MSC thesis in TU Delft.
6. Stanislas Chaillou, ArchiGAN: Artificial Intelligence x Architecture, CumInCAD, 2020.
7. RuiZhen Hu, Zeyu Huang, Yuhan Tang, Oliver Van Kaick, Hao Zhang, Hui Huang. Graph2Plan: Learning Floorplan Generation from Layout Graphs. ACM Transactions on Graphics. 2022.
8. Nelson Nauata, Kai-Hung Chang, ChinYi Cheng, Greg Mori, and Yasutaka Furukawa, House-GAN: Relational Generative Adversarial Networks for Graph-constrained House Layout Generation. ECCV. 2020.
9. Hao Tang, Zhenyu Zhang, Humphrey Shi, Bo Li, Ling Shao, Nicu Sebe, Radu Timofte, Luc Van Gool, Graph Transformer GANs for GraphConstrained House Generation. IEEE, 2023.
10. Morteza Rahbar, Mohammadjavad Mahdavinejad, Amir H.D. Markazi, Mohammadreza Bemanian, Architectural layout design through deep learning and agent-based modeling: A hybrid approach, Journal of Building Engineering, Volume 47, 2022.
13. Mohammad Amin Shabani, Sepidehsadat Hosseini, Yasutaka Furukawa, HouseDiffusion: Vector Floorplan Generation via a Diffusion Model with Discrete and Continuous Denoising. IEEE/ CVF, 2023.
14. Phillip Isola, Jun-Yan Zhu, Tinghui Zhou, Alexei A. Efros, Image-to-Image Translation with Conditional Adversarial Networks. IEEE/CVF. 2017.
15. Lei Si, Yoshiaki Yasumura. Gengnagel, Reconstruction of a 3D Model from Single 2D Image by GAN. Lecture Notes in Computer Science book series (LNAI,volume 11248). 2018.
16. Wenming Wu and Xiao-Ming Fu and Rui Tang and Yuhan Wang and Yu-Hao Qi and Ligang Liu, Data-driven Interior Plan Generation for Residential Buildings. ACM Transactions on Graphics. 2019.
17. Zhiwen Fan, Lingjie Zhu, Honghua Li, Xiaohao Chen, Siyu Zhu, Ping Tan. FloorPlanCAD: A Large-Scale CAD Drawing Dataset for Panoptic Symbol Spotting. IEEE/CVF 2021.