
Introducción
Nos complace presentar la Cuarta Edición de la Cartilla de Proyectos de Robótica STEAM del Colegio Hispanoamericano, correspondiente al año lectivo 2024–2025. Esta nueva edición consolida nuestro compromiso con una educación innovadora, integradora y con sentido, donde la robótica es mucho más que tecnología: es una herramienta para aprender, crear y transformar.
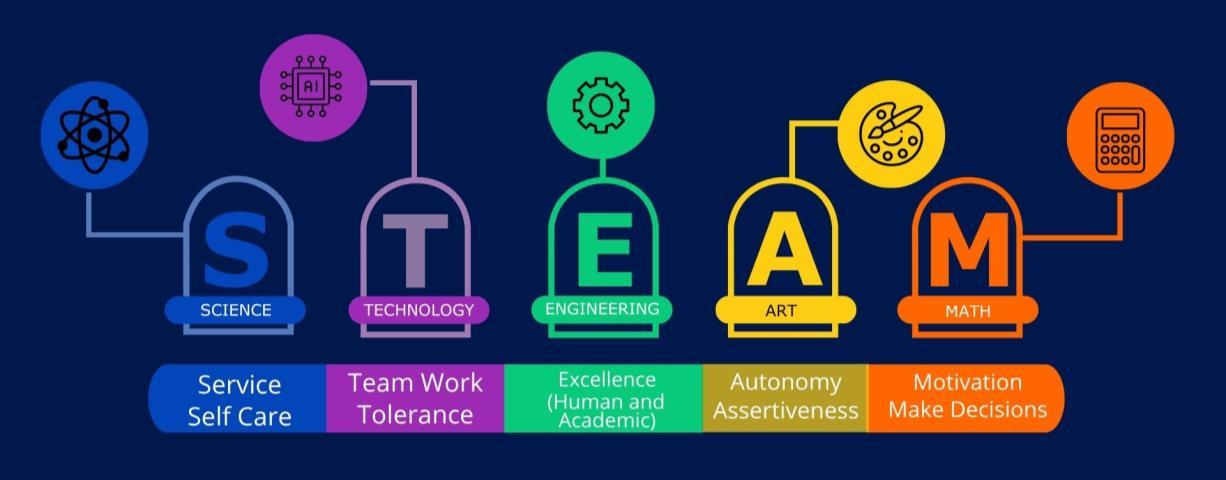
A través del enfoque STEAM (Ciencia, Tecnología, Ingeniería, Arte y Matemáticas) y nuestros cuatro ejes de trabajo herramientas web, ofimática educativa, Pensamiento T&I y Tecnología y sociedad aplicada buscando que los estudiantes fortalezcan sus habilidades clave para el siglo XXI, desarrollen su pensamiento computacional y se proyecten como ciudadanos digitales activos y creativos.
La metodología se basa en cuatro momentos esenciales: motivación, reconocimiento de saberes previos, desarrollo de proyectos y evaluación continua. Cada uno de estos pasos promueve experiencias significativas, colaborativas y alineadas con el uso ético e inteligente de la tecnología.
Además, esta cartilla se articula con nuestro Modelo Formativo Institucional, integrando valores como la excelencia humana, el trabajo en equipo, la autonomía, la asertividad y el servicio, pilares fundamentales en la formación de nuestros estudiantes.
Invitamos a toda la comunidad educativa a hacer de esta cartilla un espacio de descubrimiento, inspiración y construcción de futuro. Porque en el Colegio Hispanoamericano, la robótica se vive, se sueña y se crea.

Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics): UN VIAJE STEAM EN EL BOSQUE DE LAS ABEJAS
Grado: TRANSICIÓN
Docente: Juliana Rodríguez Valencia
Áreas de Integración: Matemáticas, Ciencias Integradas, Arte y Tecnología e Informática.
Estándar:
- Pensamiento T&I computacional y Maker
- Ciudadanía Digital y Tecnología en el enfoque STEAM
Propósito de Desarrollar: Las niñas y los niños disfrutan aprender; exploran y se relacionan con el mundo para comprenderlo y construirlo.
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:

RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema: ¿Cómo podemos utilizar el Bee Bot para aprender sobre la importancia de las abejas en el ecosistema y la necesidad de su cuidado?
● Breve descripción: Este proyecto tiene como objetivo enseñarles sobre la importancia de cuidar el ecosistema y salvar a los animales del bosque atrapados en un incendio causado por la deforestación. Utilizando el robot educativo Bee Bot y un tapete diseñado para crear retos complejos, los estudiantes aprenderán a comprender y utilizar los comandos del Bee Bot para realizar distintos retos que simulan el rescate de animales en peligro. Los estudiantes trabajarán en grupos pequeños, utilizando una ruleta para determinar el turno de cada grupo. Al final, cada estudiante representará gráficamente a la abeja Bee Bot desde el computador, consolidando su comprensión de la importancia del cuidado del medio ambiente y sus habilidades tecnológicas básicas.
● Materiales:
- Blue Bot

- Tapetes sobre el Cuidado de los Bosques
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
videos motivadores
videos tutoriales
guías de desarrollo
presentaciones online
simuladores
Se desarrolla de la siguiente manera:
● Introducción a la Importancia del Cuidado del Ecosistema
La docente comenzará el proyecto con una breve presentación sobre la importancia de cuidar el ecosistema, enfocándose en los problemas causados por la deforestación y los incendios forestales. Se utilizarán imágenes, videos atractivos y un cuento para captar la
atención de los estudiantes y ayudarlos a comprender por qué es esencial proteger nuestro entorno natural.
● Presentación del Bee Bot y sus Comandos
Se introducirá a los estudiantes el Bee Bot, explicando sus partes y cómo funciona. La docente mostrará cómo se utilizan los comandos básicos (adelante, atrás, izquierda, derecha) para programar al Bee Bot. Los estudiantes tendrán la oportunidad de practicar con los comandos, explorando cómo programar al robot para que se mueva en diferentes direcciones.
● Preparación del Tapete de Rescate en el Bosque
Se colocará un tapete grande en el suelo que representa un bosque en llamas con animales atrapados en diferentes áreas. La docente explicará que el tapete simula un bosque donde los animales, representados por diferentes figuras, necesitan ser rescatados por la abeja Bee Bot.
● Realización de los Retos de Rescate
Cada grupo tendrá el reto de programar al Bee Bot para que se mueva por el tapete y rescate a los animales atrapados en el incendio. La docente puede plantear distintos retos, como llegar a un animal específico o seguir una ruta predeterminada que evite las llamas. Los estudiantes utilizarán los comandos para guiar al Bee Bot, asegurándose de que realice el rescate correctamente.
Se utilizará una ruleta con los nombres listados de cada estudiante para determinar el turno de los grupos. Esto asegurará que todos los estudiantes tengan la oportunidad de participar de manera equitativa. Cada grupo estará compuesto por cuatro estudiantes que trabajarán juntos para programar al Bee Bot.
● Representación Gráfica de la Abeja Bee Bot
Después de completar los retos, cada estudiante tendrá la oportunidad de representar gráficamente a la abeja Bee Bot desde el computador. Utilizando programas de dibujo sencillos, los estudiantes crearán una ilustración de la abeja en acción, rescatando a los animales del bosque. Esta actividad ayudará a consolidar su comprensión del tema y sus habilidades tecnológicas básicas.
Al finalizar la actividad, la clase se reunirá para reflexionar sobre lo que han aprendido. La docente guiará una discusión sobre la importancia de cuidar el ecosistema y cómo podemos proteger a los animales y nuestro entorno natural. Los estudiantes compartirán sus dibujos y explicarán cómo su abeja Bee Bot ayudó a rescatar a los animales del bosque.
Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Ejes curriculares En proceso Mejorable Bien Excelente
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Este proyecto no solo permitirá a los estudiantes aprender sobre la importancia del cuidado del ecosistema y el rescate de animales en peligro, sino que también desarrollará sus habilidades de programación básica, colaboración en equipo y creatividad. La implementación de una ruleta
para determinar turnos asegura una participación equitativa y fomenta el trabajo en equipo. Las actividades gráficas en el computador consolidarán su comprensión del tema y reforzarán sus habilidades tecnológicas, todo en un contexto divertido e interactivo

Grado: PRIMERO
Docente: Juliana Rodríguez Valencia
Áreas de Integración: Matemáticas, Ciencias Integradas, Arte y Tecnología e Informática.
Estándar: Reconozco y menciono productos tecnológicos que contribuyen a la solución de problemas y mejorar las condiciones de vida.
Competencia a desarrollar:
- Pensamiento T&I computacional y Maker
- Ciudadanía Digital y Tecnología en el enfoque STEAM
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema:¿Cómo podemos utilizar el Tale-Bot Pro para explorar el ciclo de vida del girasol y la rana mientras aprendemos sobre proteger la biodiversidad y los ecosistemas?
● Breve descripción: En este proyecto STEAM, los estudiantes de primero utilizarán el Tale Bot para explorar y aprender sobre el ciclo de vida del girasol y la rana. A través de actividades interactivas y lúdicas, los estudiantes programarán el Tale Bot para representar las diferentes etapas del ciclo de vida de estas dos especies, desde la semilla o el huevo hasta su madurez. Además, se hará énfasis en la importancia de proteger la vida de los ecosistemas terrestres y acuáticos, para sensibilizar a los estudiantes sobre la importancia de la biodiversidad y el cuidado del medio ambiente. A través de este proyecto, los estudiantes desarrollarán habilidades tecnológicas, de pensamiento crítico y de colaboración, mientras aprenden sobre la naturaleza y la sostenibilidad.
● Materiales:
- Tale Bot y accesorios

- Guia Introductoria
- Taller de refuerzo interactivo
- Ficha de recopilación de datos
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
- videos motivadores
- videos tutoriales
- guías de desarrollo
- presentaciones online
- simuladores
Se desarrolla de la siguiente manera:
● Presentación del Tale Bot y sus cuidados
Introducir el Tale Bot, mostrando sus partes principales (botones, sensores, ruedas, etc.) y explicar cómo manejarlo adecuadamente para evitar daños. Los estudiantes deben prestar atención a las instrucciones sobre cómo encenderlo, apagarlo y cargarlo.
● Interacción inicial con el Tale Bot
Dividir a los estudiantes en grupos pequeños y proporcionarles un tapete con un diseño específico. Cada grupo tendrá la oportunidad de interactuar con el Tale Bot, respondiendo a preguntas básicas de programación (por ejemplo, cómo mover el Tale Bot hacia una dirección específica). Los estudiantes deberán colaborar para dirigir al Tale Bot por el tapete siguiendo las indicaciones.

● Guía de Comandos del Tale Bot
Entregar a cada estudiante una guía que incluya espacios para completar con los nombres y colores de los comandos del Tale Bot en inglés. Los estudiantes deberán colorear y nombrar cada comando y realizar una ilustración libre sobre cómo usarían estos comandos para navegar con el Tale Bot. De este modo los estudiantes podrán familiarizarse con el vocabulario de los comandos del Tale Bot y sus colores.
● Trabajo en Tapetes del Tale Bot
Para profundizar en el uso del Tale Bot mediante la programación de rutas específicas relacionadas con el ciclo de vida del girasol y la rana. Los estudiantes continuarán trabajando en los tapetes del Tale Bot, programando rutas que representen las diferentes etapas del ciclo de vida del girasol y la rana. Por ejemplo, programarán al Tale Bot para que se mueva desde una semilla hasta una flor en el ciclo de vida del girasol, y desde un huevo hasta una rana adulta en el ciclo de vida de la rana.
● Taller de Recapitulación
Al finalizar las actividades con el Tale Bot, los estudiantes completarán un taller que recopile lo aprendido. Este taller incluirá preguntas sobre los comandos del Tale Bot, las etapas del ciclo de vida del girasol y la rana, y reflexiones sobre cómo la actividad se relaciona con la conservación de la biodiversidad y los ODS. De este modo se podrá evaluar lo aprendido y reflexionar sobre la actividad.


Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación: Ejes curriculares En proceso Mejorable
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Para evaluar la efectividad de la actividad y obtener retroalimentación valiosa, se implementó una ficha virtual que recopilaba la percepción de los estudiantes sobre la experiencia con el Tale Bot. A través de esta ficha, los estudiantes pudieron expresar lo que más les gustó de la actividad, como las interacciones con el Tale Bot y la programación de rutas, así como lo que menos les gustó o encontraron más desafiante. Esta información nos permitirá ajustar futuras actividades para mejorar la experiencia educativa y garantizar que se adapten a las necesidades y preferencias de los estudiantes, fomentando un aprendizaje más efectivo y satisfactorio.

La implementación de este tipo de proyectos con el Tale Bot no solo enseña a los estudiantes sobre programación y robótica de manera lúdica, sino que también promovió la integración de conceptos científicos y conciencia sobre los ODS, permitiendo así una educación integral y multidisciplinaria.
Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics): VIAJANDO POR ESPAÑA CON MTINY
Grado: SEGUNDO
Docentes: Juliana Rodríguez Valencia y Yamilet Caicedo Posso
Áreas de Integración: Matemáticas, Ciencias Integradas, Geografía e Historia de España y Tecnología e Informática.
Estándar:
Tecnología e Informática
- Reconozco y menciono productos tecnológicos que contribuyen a la solución de problemas y mejorar las condiciones de vida.
Geografía e Historia de España
- Me familiarizo con algunos aspectos relevantes de la geografía de España
Competencia a desarrollar:
Tecnología e Informática
- Pensamiento T&I computacional y Maker
- Ciudadanía Digital y Tecnología en el enfoque STEAM
Geografía e Historia de España
- Cognitivas
- Procedimentales.
- Actitudinales
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema: ¿Cómo podemos utilizar el mTiny para descubrir y aprender sobre las comunidades autónomas, sus límites geográficos, celebraciones festivas, monumentos emblemáticos, personajes históricos y platos típicos de España y Madrid?
● Breve descripción: En este proyecto, vamos a utilizar el robot mTiny para hacer un emocionante recorrido por los diferentes aspectos culturales, geográficos y turísticos de España y su hermosa capital, Madrid. Utilizando el robot educativo mTiny y un tapete especial, los estudiantes programarán al mTiny para moverse desde un punto específico a otro, utilizando cartas de código para crear algoritmos que guiarán al mTiny en su viaje por España y Madrid.
● Materiales:
- MTiny y accesorios

- Taller de Programación
- Guía en Power Point
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
- videos motivadores
- videos tutoriales
- guías de desarrollo
- presentaciones online
- simuladores
Se desarrolla de la siguiente manera:
● Elección del destino para investigar
Para contextualizar a los estudiantes antes de realizar la actividad de programación con mTiny, la docente de Geografía e Historia de España dirigirá una sesión de investigación. En esta sesión, los estudiantes pueden investigar y elegir un lugar interesante en España o Madrid, como límites geográficos, celebraciones festivas, monumentos emblemáticos, personajes históricos y platos típicos. Cada estudiante preparará una breve presentación que compartirán con el resto de la clase, proporcionando una base de conocimiento común.
● Introducción a la Programación por Bloques y al mTiny
Antes de iniciar las actividades con el mTiny, en tecnología e informática se realizará un taller de programación por bloques. Este taller tiene como objetivo preparar a los estudiantes para la actividad principal, ayudándoles a comprender los conceptos básicos de la programación por bloques. Durante el taller, los estudiantes aprenderán a realizar algoritmos y a crear secuencias de comandos simples, lo que les permitirá adquirir confianza y habilidades necesarias para programar al mTiny.
Después del taller introductorio a la programación, se introducirá a los estudiantes el mTiny, explicando sus partes y cuidados esenciales. Se les mostrará cómo manejar el robot de manera segura y efectiva. Además, se dará un espacio para reforzar el conocimiento sobre las comunidades autónomas de España y Madrid, destacando la importancia cultural y geográfica de cada una, y explicando brevemente lo que aprenderán sobre los límites geográficos, celebraciones festivas, monumentos emblemáticos, personajes históricos y platos típicos de cada región mientras aprenden a programar a mTiny.
● Actividades Iniciales e Interactivas con mTiny
Dividiremos a los estudiantes en pequeños grupos y asignaremos un reto para todos los grupos. Cada grupo utilizará las cartas de código para programar al mTiny y guiarlo desde un punto de partida específico hasta otro punto en el tapete, pasando por diferentes comunidades autónomas. Esta actividad inicial les ayudará a familiarizarse con la programación del mTiny y a empezar a explorar las regiones.

Los estudiantes continuarán trabajando con el tapete del mTiny, programando rutas más complejas y descubriendo más detalles sobre las comunidades autónomas y Madrid. Durante esta fase, se fomentará la colaboración y discusión entre los estudiantes, animándolos a compartir sus descubrimientos y a aprender unos de otros. Esto les permitirá profundizar en su comprensión de las regiones y mejorar sus habilidades de programación.
● Fortalecimiento en Programación con Moodle
Para seguir fortaleciendo a los estudiantes en el tema de programación, se les asignarán diversas actividades en la plataforma Moodle. Estas actividades estarán diseñadas para que los estudiantes puedan practicar en casa, reforzando los conceptos aprendidos en clase y mejorando sus habilidades de programación a través de ejercicios interactivos y desafíos adicionales.

Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Al finalizar las actividades, se brindará un espacio para que los estudiantes compartan su percepción sobre la actividad. En este espacio se harán preguntas sobre lo que más les gustó y lo que menos les gustó de la experiencia con el mTiny y el aprendizaje sobre las comunidades autónomas. La retroalimentación obtenida será esencial para ajustar y mejorar futuras actividades, asegurando que sean atractivas y educativas para todos los estudiantes.
Este proyecto no solo permitirá a los estudiantes aprender sobre las comunidades autónomas de España y Madrid, sino que también desarrollará sus habilidades de programación, pensamiento crítico y colaboración en equipo, todo en un contexto divertido e interactivo, asegurando una experiencia de aprendizaje enriquecedora y efectiva.
Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics): SOLUCIÓN SOSTENIBLE CON CIRCUITOS SIMPLES
Grado: TERCERO
Docentes: Juliana Rodríguez Valencia y Juliana Palacio Millán
Áreas de Integración: Ciencias Integradas, Arte y Tecnología e Informática.
Estándar: Reconozco y valoro el impacto que los avances tecnológicos generan en la sociedad, a través del desarrollo de prototipos como parte de un proceso iterativo de diseño y programación.
Competencia a desarrollar:
- Pensamiento T&I computacional y Maker
- Ciudadanía Digital y Tecnología en el enfoque STEAM
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
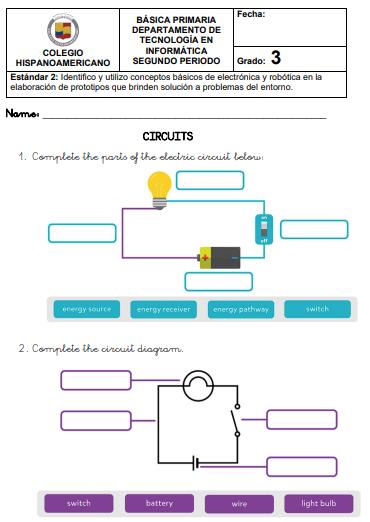
● Definir el problema: ¿Cómo podemos utilizar circuitos simples para crear prototipos que solucionen problemas reales y contribuyan a los Objetivos de Desarrollo Sostenible?
● Breve descripción: En este proyecto, los estudiantes de tercer grado explorarán los conceptos de circuitos simples para desarrollar prototipos innovadores que aborden tres problemáticas distintas basadas en los Objetivos de Desarrollo Sostenible (ODS). Trabajarán en grupos para identificar una problemática, proponer una solución y diseñar un prototipo que utilice un circuito simple. Los estudiantes anotarán sus ideas y los materiales necesarios en un taller grupal. Posteriormente, se seleccionará la mejor idea de cada grado para llevarla a cabo en colaboración. Para reforzar el conocimiento sobre los componentes y la elaboración de circuitos, los estudiantes participarán en talleres físicos e interactivos en la plataforma Moodle.
● Materiales:
- Pilas
- Conectores de pilas
- Switches
- Motores
- Palos de madera
- Marcadores
- Tapas de botellas
- Silicona
- Cepillo
- Círculos de cartón
- Platos de plásticos
- Papel
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
- videos motivadores
- videos tutoriales
- guías de desarrollo
- presentaciones online
- simuladores
Se desarrolla de la siguiente manera:
● Introducción a los ODS y Circuitos Simples
La actividad comienza con una presentación interactiva en clase sobre los Objetivos de Desarrollo Sostenible y una demostración básica de cómo funciona un circuito simple
utilizando materiales accesibles como baterías, cables, bombillas y motores. Esta introducción tiene como objetivo familiarizar a los estudiantes con los conceptos fundamentales de los ODS y los componentes de un circuito simple, explicando su importancia y aplicación práctica.
Paralelamente, los estudiantes realizarán actividades interactivas en la plataforma Moodle, que incluyen videotutoriales, ejercicios prácticos y cuestionarios para reforzar su conocimiento práctico sobre circuitos simples. Estas actividades complementarias ayudarán a que los estudiantes estén bien preparados para desarrollar sus prototipos, combinando el aprendizaje en el aula con el uso de recursos tanto físicos como digitales para una comprensión integral.
● Identificación de Problemas y Formación de Grupos
Los estudiantes participan en una discusión en clase para identificar tres problemáticas relacionadas con los ODS, fomentando el pensamiento crítico y la colaboración. Posteriormente, se dividen en grupos, cada uno eligiendo una problemática a la cual desean encontrar una solución.
Las tres problemáticas para esta actividad son las siguientes:


● Diligenciamiento del Taller Grupal y Presentación de Propuestas
En esta etapa, cada grupo completa un taller donde describen la problemática elegida, proponen una solución y detallan los materiales y pasos necesarios para crear su prototipo, lo que les permite planificar su solución de manera estructurada.
Los grupos presentan sus propuestas ante la clase, donde se realiza una evaluación para seleccionar la propuesta más viable y creativa. Esto permite seleccionar la mejor idea de cada grado para su implementación.
● Preparación y Construcción del Prototipo
En las sesiones de planificación, los estudiantes revisan los componentes de los circuitos simples, asegurándose de comprender cómo funcionan y cómo se interconectan. Cada grupo de estudiantes realiza esquemas detallados de su prototipo, delineando claramente los pasos necesarios para la construcción. Durante esta etapa, también preparan y organizan los materiales necesarios, como baterías, cables, interruptores, bombillas y cualquier otro componente que su prototipo requiera, asegurándose de que todo esté listo para la fase de construcción.
Una vez finalizada la planificación, los estudiantes, trabajando en sus grupos, proceden a construir su prototipo. Siguen cuidadosamente los esquemas planificados, conectando cada componente según lo diseñado y verificando que el circuito funcione correctamente. Este proceso práctico les permite aplicar directamente la teoría aprendida, enfrentarse a desafíos reales y encontrar soluciones, llevando a la práctica la solución propuesta para la problemática basada en los Objetivos de Desarrollo Sostenible. Si el prototipo no funciona correctamente en el primer intento, también está bien, ya que identificar y solucionar errores forma parte fundamental del proceso de aprendizaje y desarrollo de habilidades.
● Presentación Final del Prototipo
Los grupos presentan sus prototipos terminados a la clase, explicando cómo funcionan y cómo abordan la problemática seleccionada, compartiendo el trabajo realizado y reflexionando sobre el proceso y los aprendizajes.
Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Ejes curriculares En proceso Mejorable Bien Excelente
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Al concluir la construcción de los prototipos, se brindó a los estudiantes un espacio de reflexión y discusión en el aula. Durante esta sesión, cada grupo tuvo la oportunidad de presentar su prototipo, explicar el proceso seguido, los desafíos encontrados y las soluciones implementadas. Los estudiantes compartieron sus experiencias, destacando lo que aprendieron sobre circuitos simples y cómo estos pueden aplicarse para abordar problemas reales basados en los Objetivos de Desarrollo Sostenible. Además, se fomentó un ambiente de colaboración y apoyo mutuo, donde los estudiantes pudieron hacer preguntas y proporcionar retroalimentación constructiva a sus compañeros. Esta reflexión final no solo consolidó el conocimiento adquirido, sino que también fortaleció las habilidades de comunicación y trabajo en equipo, permitiendo a los estudiantes apreciar el valor del esfuerzo colectivo y la importancia del aprendizaje a través de la práctica y la experimentación.

Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics): CONSTRUYE UN INSTRUMENTO MUSICAL CON MAKEY MAKEY Y SCRATCH
Grado: CUARTO
Docente: Juliana Palacio Millán - Juliana Rodríguez Valencia
Áreas de Integración: Arte y Tecnología e Informática.
Estándar: Reconozco y valoro el impacto que los avances tecnológicos generan en la sociedad a través del desarrollo de prototipos como parte del proceso iterativo de diseño y programación.
Competencia a desarrollar:
- Manejo de la información en el mundo digital (CMI-MD)
- Pensamiento T&I computacional y Maker
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema: (Problemática que se relacione con los ODS (Objetivos de desarrollo sostenible)).
¿Cómo pueden los estudiantes diseñar y programar vehículos funcionales con LEGO WeDo 2.0?, como un montacargas, un camión de reciclaje o un automóvil con dirección autónoma, que se desempeñen eficientemente en distintas superficies y respondan a necesidades de transporte o sostenibilidad en sus comunidades?
● Breve descripción: (Breve descripción de la problemática a desarrollar)
Los estudiantes de cuarto grado construirán y programaron diferentes vehículos con LEGO WeDo 2.0 para explorar cómo las características de su diseño afectan su desempeño en distintas superficies y que cumplan distintas funciones. A través de este proyecto, desarrollarán habilidades en ciencia, tecnología e ingeniería mientras aplican el método científico para resolver problemas de transporte.
Cada grupo selecciona un tipo de vehículo para desarrollar. Se establecen los roles en los que cada uno de los integrantes va a trabajar y comienzan desarrollando las actividades para cada una de las semanas.
El proyecto cuento con tres fases:
a. Armado y programación
Objetivo: Construir diferentes modelos de vehículos con LEGO WeDo 2.0 y programarlos para que se desplacen.
Actividades:
Presentación del desafío: "Diseñar un vehículo que pueda moverse eficazmente en un tipo de superficie específico".
Introducción a los componentes de LEGO WeDo 2.0 (motores, sensores, engranajes, ruedas).
Construcción de vehículos según superficie.
Programación básica para controlar el movimiento del vehículo, ajustar velocidad y dirección. Pruebas iniciales de funcionamiento.
b. Modelado: Se crea un modelo del proyecto en el software Lego Digital Designer.
c. Presentación final: Los estudiantes realizarán una presentación en Power Point la cual debe incluir los siguientes puntos:
● Nombre del proyecto
● Cada grupo presenta su vehículo, explicando el proceso de construcción, programación y mejoras realizadas.
● Elementos necesarios para la elaboración del vehículo escogido (se puede realizar en una tabla)
● Describir cómo estos vehículos aportan a la sociedad.
● Incluir en la presentación imágenes o videos del armado.
● Pruebas finales en los escenarios creados, observando el desempeño de los vehículos.
● Materiales: (Materiales utilizado en el desarrollo del proyecto – Software – Kits de robótica, dispositivos electrónicos)
Para desarrollar el proyecto se requieren los siguientes materiales.
Cartón o cartón paja
- Pegante
- Marcadores, colores o pintura
- Lápices
- Computador
- Kit de Lego WeDo 2.0
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
- Videos tutoriales
- Guías de desarrollo
- Presentaciones online
- Simuladores
Para la realización de este proyecto se dispuso la siguiente metodología:
1. Organización de grupos
Cada grupo de grado cuarto cuenta con aproximadamente 31 estudiantes por lo que se organizarán 8 grupos (7 de 4 y de 3 estudiantes)
2. Selección del vehículo.
Explorando el Transporte en Diferentes Terrenos con LEGO WeDo 2.0
Vehículos Enlace
Montacarga https://www.youtube.com/watch?v=jVUlR_iqU1k&ab_channel=LegoTix
Automóvil con dirección autónoma
https://www.youtube.com/watch?v=aKpQszhLxRw&embeds_referring_e uri=https%3A%2F%2Fissuu.com%2F&source_ve_path=MjM4NTE
Vehiculo Milo Lego WeDo 2.0
Camión de reciclaje
Papelera Reciclable Inteligente
Helicóptero
https://www.youtube.com/watch?v=HuhzQjLv2D8&embeds_referring_eu ri=https%3A%2F%2Fissuu.com%2F&source_ve_path=MjM4NTE
https://www.youtube.com/watch?v=kdg7cnTWioU&ab_channel=M%C3% AC2T%C3%B4m
https://www.youtube.com/watch?v=Vb9S4DmuQXM&embeds_referring_ euri=https%3A%2F%2Fissuu.com%2F&source_ve_path=MjM4NTE
Vehículo de fuerza Lego WeDo 2.0.
Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo. Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Al compartir sus proyectos, los estudiantes no solo tuvieron la oportunidad de mostrar y explicar sus creaciones a sus compañeros, sino que también se abrió un espacio para discutir lo que más disfrutaron de la actividad y los obstáculos que enfrentaron durante su desarrollo. Esta interacción no solo fortaleció el trabajo colaborativo y la comunicación asertiva entre los estudiantes, sino que también permitió consolidar los conocimientos adquiridos a lo largo de este año y en años anteriores. Fue una instancia en la cual pudieron reflexionar sobre cómo aplicar de manera práctica lo aprendido en el aula, destacando la importancia del aprendizaje continuo y la experimentación en el proceso educativo.

Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics): Máquinas en movimiento (Explorando la Dinámica de Vehículos con LEGO WeDo 2.0).
Grado: Quinto
Docente: John Jairo Zabala Gómez
Áreas de Integración: Ciencias Naturales y Tecnología e Informática.
Estándar:
COLEGIO HISPANOAMERICANO
Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics): Solución de retos de programación con MBOT
Grado: 5°
Áreas de Integración: Matemáticas y Tecnología e Informática.
Estándar: (los docentes escriben los estándares que se trabajarán en el desarrollo del proyecto de acuerdo a lo estipulado en el Plan de estudios).
Reconozco y valoro el impacto que los avances tecnológicos generan en la sociedad, a través del desarrollo de prototipos como parte de un proceso iterativo de diseño y programación.
Competencia a desarrollar: (se ingresan las competencias interdisciplinares que se desarrollan en el proyecto).
● Pensamiento T&I computacional y Maker
● Ciudadanía Digital y Tecnología en el enfoque STEAM
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema: (Problemática que se relacione con los ODS (Objetivos de desarrollo sostenible)).
¿Cómo podemos mejorar el pensamiento lógico y el uso significativo de la tecnología en estudiantes de primaria mediante experiencias prácticas con robótica?
● Breve descripción: (Breve descripción de la problemática a desarrollar)
A pesar de vivir en una era digital, muchos estudiantes de primaria no tienen suficientes oportunidades para desarrollar habilidades en programación, pensamiento lógico y uso creativo de la tecnología. Esto limita su preparación para los desafíos académicos y profesionales del siglo XXI. Incorporar experiencias prácticas con robótica educativa permite fortalecer estas competencias desde edades tempranas, promoviendo una educación más activa e inclusiva. Este proyecto está orientado a fortalecer el ODS #4 EDUCACIÓN DE CALIDAD.
● Materiales: (Materiales utilizado en el desarrollo del proyecto – Software – Kits de robótica, dispositivos electrónicos)
Los materiales para desarrollar este proyecto son:
Hardware: Kit de robótica MBOT, Portátiles, Herramientas de armado y desarmado del MBOT, material didáctico (pistas, laberinto, etc), baterías AA.
Software: mLink 2.0, internet, office, plataforma Moodle.
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
- videos motivadores
- videos
- guías de desarrollo
- presentaciones online
- simuladores
En esta fase se organizan los grupos de trabajo conformados por 4 o 5 estudiantes. Cada grupo debe subdividirse en dos grupos para realizar dos roles; programación y documentación.
Programación
En este rol los estudiantes deben resolver el reto planteado por el docente utilizando el software mBlock. Para ello deben analizar el reto planteado y realizar la programación por bloques y luego deben subirla al Mbot para que este cumpla con el objetivo planteado.
RETO #1. MOVIMIENTO CON EL MBOT
Los estudiantes deben recorrer una ruta con el Mbot, el cual debe ser programado para que siga la ruta, es decir, debe iniciar en un punto de partido y llegar a un punto de llegada.

Para este reto los estudiantes tienen como base un ejemplo de movimiento del Mbot, como se muestra en la imagen:

RETO #2 - SENSOR ULTRASÓNICO
Para realizar este reto inicialmente se da la orientación del uso del sensor ultrasónico:
SENSOR ULTRASÓNICO
un sensor ultrasónico es un dispositivo que mide la distancia entre el robot y un objeto usando ondas de sonido. Funciona emitiendo un pulso ultrasónico y midiendo el tiempo que tarda en rebotar en un objeto y volver. Con esta información, el mBot puede:
● Evitar obstáculos
● Seguir rutas sin chocar
● Detenerse a una distancia específica
Posteriormente se plantea el reto en el cual los estudiantes deben programar el Mbot para que salga solo de un laberinto:

Para realizar este reto se da un ejemplo sencillo de cómo progamar el Mbot para que al detectar un obstáculo gire a la izquierda:

RETO #3 - SENSOR DE SONIDO
Para realizar este reto inicialmente se da la orientación del uso del sensor ultrasónico:
SENSOR DE SONIDO
El sensor de sonido en mBot detecta la intensidad del ruido en el ambiente. No reconoce palabras ni voces, solo mide cuán fuerte es un sonido.
Se usa para:
● Activar acciones del robot al aplaudir o hacer un ruido fuerte
● Cambiar comportamientos según el nivel de sonido
● Crear interacciones simples basadas en el entorno acústico
Es útil para proyectos donde el mBot reacciona al sonido de manera básica.
Para este reto inicialmente se da un ejemplo del funcionamiento de este sensor, para ello se plantea el siguiente ejercicio:
Si el sensor de sonido detecta un sonido superior a 300 avance, sino detengase. Esta es la programación para este ejemplo:

El reto a resolver es el siguiente:
El Mbot se encuentra descansando tranquilamente, se encuentra quieto y con los ojos cerrados, de repente escucha un fuerte ruido y se asusta y sale corriendo y abre los ojos.
Para este reto se explica el uso de la pantalla de leds de Mbot:

Para programar esta pantalla se utiliza la siguiente programación. Por ejemplo, para mostrar el Mbot sonriente:

Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Ejes curriculares En proceso Mejorable Bien Excelente
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Establecer las conclusiones y alcances del proyecto. Comparte e intercambia los conocimientos aprendidos.
Blog, foros, conversatorios, enlaces públicos, folletos, afiches, informe en ofimática.
Bibliografía
https://www.youtube.com/watch?v=4yneo7gBOuo
https://www.youtube.com/watch?v=LIm2i3pAa8w
https://www.programoergosum.es/tutoriales/sensor-ultrasonidos-del-robot-mbot/
https://libros.catedu.es/books/robotica-educativa-con-mbot-avanzado/page/sensor-sonido
https://www.oscarabilleira.com/wpcontent/uploads/2023/10/divirtiendome_con_mbot__espanol.pdf
https://static.pcfactory.cl/pdf/User_Guide___Makeblock_mBot.pdf

Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics): PROYECTO INTERDISCIPLINAR DE ROBÓTICA STEAM CON HIDRÁULICA.
Grado: 6°
Áreas de Integración: Matemáticas, Ciencias Naturales.
Estándar: (los docentes escriben los estándares que se trabajarán en el desarrollo del proyecto de acuerdo a lo estipulado en el Plan de estudios).
Reconozco y valoro el impacto que los avances tecnológicos generan en la sociedad, a través del desarrollo de prototipos como parte de un proceso iterativo de diseño y programación.
Competencia a desarrollar: (se ingresan las competencias interdisciplinares que se desarrollan en el proyecto).
● Pensamiento T&I computacional y Maker
● Ciudadanía Digital y Tecnología en el enfoque STEAM
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema: (Problemática que se relacione con los ODS (Objetivos de desarrollo sostenible)).
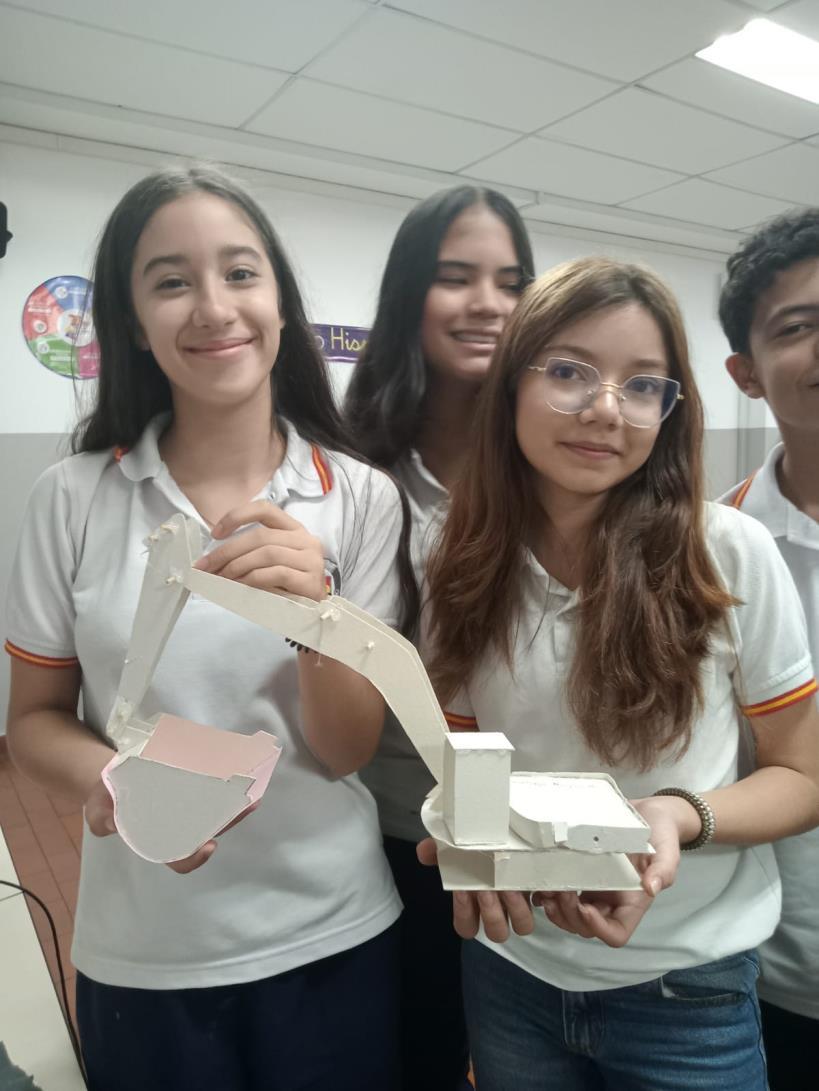
¿Cómo podríamos diseñar una máquina simple, económica y funcional que utilice principios de la hidráulica para simular el funcionamiento de una grúa, una excavadora u otra máquina amarilla, utilizando jeringas, agua y materiales reciclables?"
● Breve descripción: (Breve descripción de la problemática a desarrollar)
Los estudiantes diseñarán y construirán una máquina hidráulica inspirada en las "máquinas amarillas" utilizadas en la construcción (como grúas, excavadoras o brazos mecánicos). Utilizando jeringas, tubos, agua y materiales reciclables, aplicarán principios de la física y la tecnología para crear un sistema funcional de movimiento mediante presión de fluidos. El proyecto integrará el enfoque STEAM, combinando ciencia (principio de Pascal), tecnología (uso de mecanismos), ingeniería (diseño y construcción), arte (diseño estético del modelo) y matemáticas (medición, proporciones y cálculos básicos). El objetivo es resolver un problema realista de manipulación o transporte de objetos pequeños de forma creativa y colaborativa. Este proyecto está orientado a fortalecer el ODS #9 INDUSTRIA INNOVACIÓN E INFRAESTRUCTURA.
● Materiales: (Materiales utilizado en el desarrollo del proyecto – Software – Kits de robótica, dispositivos electrónicos)
Materiales principales:
● Jeringas (de 10 ml mínimo 4 por grupo)
● Tubos plásticos flexibles (compatibles con las jeringas)
● Agua
● Cartón paja
● Cinta adhesiva, silicona caliente
● Palos de pincho.
● Tijeras, cúter y regla
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
- videos motivadores
- videos tutoriales
- guías de desarrollo
- presentaciones online
- simuladores
En esta fase se organizan los grupos de trabajo de 3 o 4 estudiantes. Luego se presentan los lineamientos del proyecto:
Fases del proyecto
Fase 1. Contextualización. (6 clases)
● Presentación del proyecto.
● Diseño 2D a 3D
● Conceptualización hidráulica
● Ejercicio básico hidráulica con jeringas
● Conformación de grupos de trabajo
Fase 2. Diseño máquinas (4 clases)
● Diseño de piezas en 2D (Inkscape)
● Conversión piezas en 3D
● Ajuste de diseño
Fase 3. Visita Komatsu (2 clases)
● Rotación por estaciones
● Estación 1. Taller y mantenimiento de máquinas amarillas
● Estación 2. Conociendo la empresa Komatsu
● Estación 3. Funcionamiento de una máquina retroexcavadora
● Estación 4. Cuidado medioambiental en Komatsu
● Preguntas de reflexión sobre el impacto medioambiental
Fase 4. Ensamble de máquinas (3 clases)





Desarrollo
Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Ejes curriculares En proceso Mejorable Bien Excelente
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Establecer las conclusiones y alcances del proyecto. Comparte e intercambia los conocimientos aprendidos.
Blog, foros, conversatorios, enlaces públicos, folletos, afiches, informe en ofimática.
Bibliografía
https://youtu.be/zHNu7OycW7Q
https://youtu.be/owIh1YFTLjM
https://youtu.be/PXCFcvqocAk
https://youtu.be/-_mmxMh3Gj8
https://youtu.be/m9V0tlGyNLg
https://youtu.be/WdoQWMBJIWU
https://youtu.be/BHMLxxO5Mdk
https://youtu.be/bAgF8gDPTMw
https://youtu.be/jOIbjYQrGQA
https://youtu.be/Cc_Klipyiv8
https://youtu.be/pOjOmVHQUeM
Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics): Grado: 7°
Áreas de Integración: Matemáticas y Tecnología e Informática.
Estándar: (los docentes escriben los estándares que se trabajarán en el desarrollo del proyecto de acuerdo a lo estipulado en el Plan de estudios).
Reconozco y valoro el impacto que los avances tecnológicos generan en la sociedad, a través del desarrollo de prototipos como parte de un proceso iterativo de diseño y programación.
Competencia a desarrollar: (se ingresan las competencias interdisciplinares que se desarrollan en el proyecto).
● Pensamiento T&I computacional y Maker
● Ciudadanía Digital y Tecnología en el enfoque STEAM
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema: (Problemática que se relacione con los ODS (Objetivos de desarrollo sostenible)).
¿Cómo podemossolucionar problemasde nuestro entorno para brindar salud y bienestar a las personas utilizando el kit de robótica Halocode?
● Breve descripción: (Breve descripción de la problemática a desarrollar)
Este proyecto busca que los estudiantes identifiquen problemas reales de su entorno relacionados con la salud y el bienestar de las personas, y propongan soluciones tecnológicas creativas utilizando el kit de robótica Halocode. A través del enfoque STEAM, integrarán conocimientos de ciencia (cuerpo humano, medio ambiente), tecnología (programación por bloques), ingeniería (diseño de prototipos), arte (diseño visual y comunicación) y matemáticas (medición y análisis de datos). Los estudiantes diseñarán y programarán prototipos interactivos que, por ejemplo, detecten un nivel de sonido y emitan una alerta, detecten el movimiento del giroscopio del Halocode y emitan una señal de alerta, etc. El proyecto está alineado con el ODS 3: Salud y Bienestar, fomentando además el pensamiento crítico, la empatía y el trabajo colaborativo.
● Materiales: (Materiales utilizado en el desarrollo del proyecto – Software – Kits de robótica, dispositivos electrónicos)
● Tarjeta Halocode
● Cables USB
● Cables tipo caimán
● Portátil
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
- videos motivadores
- videos tutoriales
- guías de desarrollo
- presentaciones online
- simuladores
Fase 1: Fundamentos de Halocode
● Introducción a la tarjeta Halocode: características, sensores integrados (luz, sonido, botón táctil, Wi-Fi, acelerómetro, etc.) y puertos de expansión.
● Explicación del entorno de programación mBlock y su relación con la tarjeta.
● Ejercicios básicos para familiarizarse con entradas, salidas y bloques de programación.
Fase 2:
Organización de grupos de trabajo
● Formación de equipos de 3 o 4 estudiantes por grupo.
● Asignación de roles: programador(a), diseñador(a), documentador(a), expositor(a).
● Socialización del problema general: ¿Cómo podemos solucionar problemas de nuestro entorno para brindar salud y bienestar a las personas utilizando el kit de robótica Halocode?
Fase 3: Metodología del proyecto
● Planteamiento del reto específico: Cada grupo define un problema real relacionado con salud y bienestar en su entorno.
● Diseño de la solución: Borrador de la propuesta, identificación de los sensores necesarios y definición del funcionamiento deseado.
● Programación en mBlock: Desarrollo del código utilizando Halocode y pruebas por etapas.
● Construcción y conexión: Armado del sistema con los componentes necesarios (bocina, LED, sensores, etc.).
● Documentación del proyecto:
● Portada con nombres del grupo
● Descripción del problema
● Solución propuesta
● Capturas del código
● Fotografías del prototipo
● Presentación final del prototipo: Explicación del problema, demostración funcional del proyecto y respuesta a preguntas del docente o compañeros.
Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Ejes curriculares En proceso Mejorable Bien Excelente
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Establecer las conclusiones y alcances del proyecto. Comparte e intercambia los conocimientos aprendidos.
Blog, foros, conversatorios, enlaces públicos, folletos, afiches, informe en ofimática.
Bibliografía
https://creativashop.com/products/halocode1?srsltid=AfmBOooSgKYX84QsYSm5AZZVI7vtuhBuoNxZzxtdC-9jaWy9eJkshiZ&variant=30239057936455
https://www.un.org/sustainabledevelopment/es/objetivos-de-desarrollo-sostenible/
https://www.un.org/sustainabledevelopment/es/health/
https://cdnc.heyzine.com/files/uploaded/3201ed59f91f33ac0b90ffad2b07c66586f16290.pdf
https://cdnc.heyzine.com/files/uploaded/v2/71edfeec90e057c8cb39207a0da5056de80342e61.pdf
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema: (Problemática que se relacione con los ODS (Objetivos de desarrollo sostenible)).
¿Cómo podemos diseñar y programar un robot con LEGO Mindstorms EV3 que sea capaz de superar retos de navegación, reconocimiento de objetos o ejecución de tareas automáticas, aplicando estructuras de programación como bucles, condiciones y sensores?"
● Breve descripción: (Breve descripción de la problemática a desarrollar)
En este proyecto, los estudiantes utilizarán el kit LEGO Mindstorms EV3 para diseñar, construir y programar robots capaces de resolver retos que simulan situaciones reales como evitar obstáculos, seguir líneas, clasificar objetos o realizar recorridos autónomos. El enfoque principal será fortalecer las habilidades de programación estructurada, haciendo uso de bucles, condicionales, y sensores (ultrasónico, de color, giroscopio, etc.).
A través del enfoque STEAM, los estudiantes integrarán conocimientos de ingeniería, tecnología y matemáticas, desarrollando además pensamiento lógico, trabajo en equipo y resolución de problemas.
Este proyecto puede estar alineado con el ODS 4: Educación de Calidad, ya que promueve el desarrollo de competencias digitales y tecnológicas esenciales para el siglo XXI. También puede vincularse con el ODS 9: Industria, Innovación e Infraestructura, al fomentar la innovación mediante soluciones robóticas aplicables a entornos reales.
● Materiales: (Materiales utilizado en el desarrollo del proyecto – Software – Kits de robótica, dispositivos electrónicos)
● Kit de Lego Minstorm EV3
● Portátiles
● Material didáctico
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
● Videos motivadores
● Videos tutoriales
● Guías de desarrollo
● Presentaciones online
● Simuladores
Fase 1: Fundamentos de LEGO Mindstorms EV3
● Introducción al kit EV3: partes principales (bloque inteligente, motores, sensores).
● Explicación del entorno de programación (EV3 Classroom o EV3 Lab).
● Actividades introductorias para programar movimientos básicos y leer sensores.
● Identificación de estructuras clave: secuencias, bucles, condicionales, eventos.
Fase 2: Organización de grupos de trabajo
● Formación de equipos de 3 o 4 estudiantes por grupo.
● Distribución de roles: programador(a), diseñador(a), documentador(a), expositor(a).
● Lectura del problema general: ¿Cómo podemos diseñar y programar un robot con LEGO EV3 que supere retos aplicando estructuras de programación?
Fase 3: Metodología del proyecto
● Planteamiento del reto específico: Cada grupo elige o formula un reto (ej. seguir línea, clasificar colores, evitar obstáculos, resolver un laberinto).
● Diseño del robot: Construcción del modelo que responda al reto elegido.
● Programación: Uso de bloques de control, sensores y estructuras lógicas para resolver el reto.
● Iteración y pruebas: Ajuste de diseño y código a partir de la retroalimentación y resultados en pruebas reales.
● Documentación del proyecto:
● Portada con nombres del grupo
● Descripción del reto
● Solución propuesta
● Capturas del código
● Fotos del robot
● Presentación final del prototipo: Demostración funcional, explicación de la programación y reflexión sobre el aprendizaje.
Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Ejes curriculares En proceso Mejorable Bien Excelente
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Establecer las conclusiones y alcances del proyecto. Comparte e intercambia los conocimientos aprendidos.
Blog, foros, conversatorios, enlaces públicos, folletos, afiches, informe en ofimática.
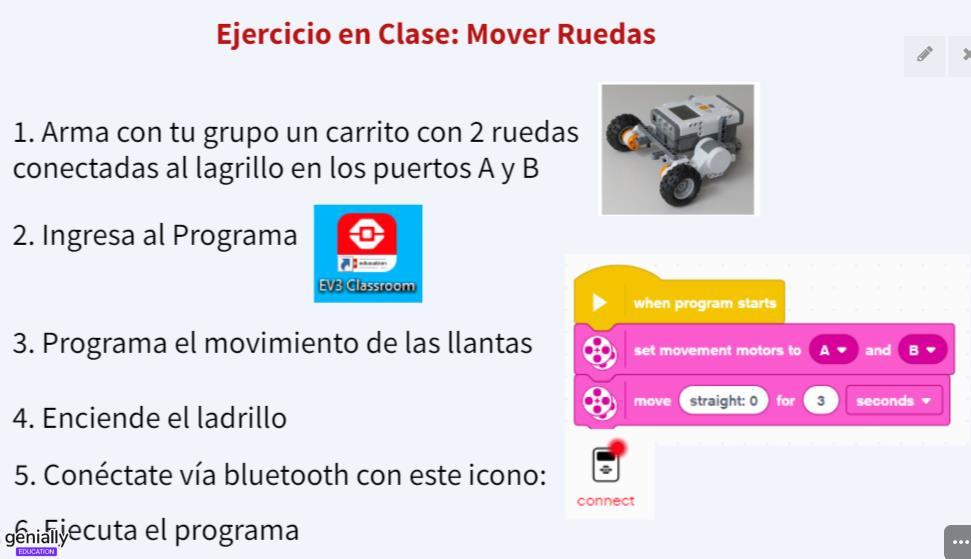
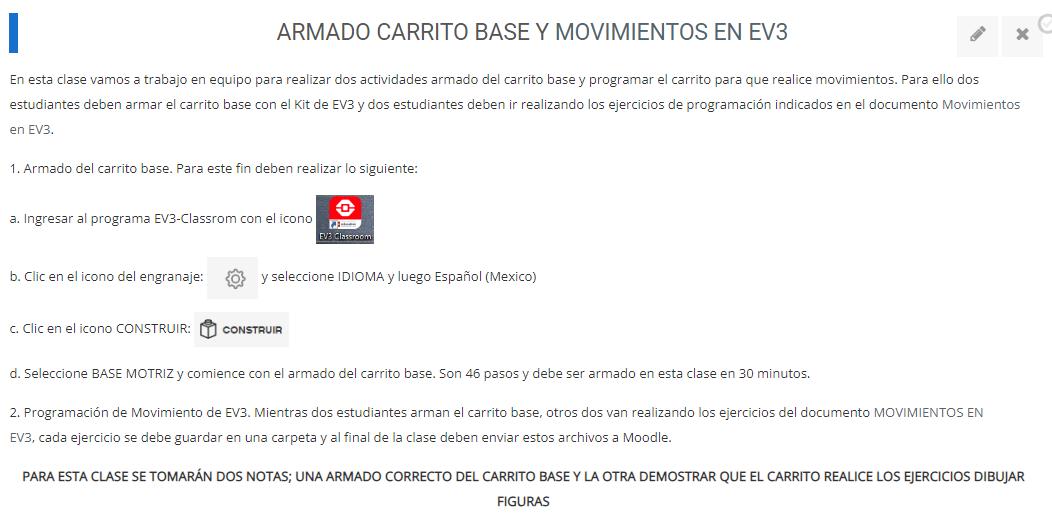
1. Modelado del carrito base.
En esta fase los estudiantes armaron el carrito base para desarrollar los retos del proyecto de robótica STEAM, para ello utilizaron el software Lego Digital Designer:

5.Desarrollo de Retos con Lego Minstorm EV3.
Una vez los estudiantes tenían armado se carrito base y saben utilizar las herramientas para programar el EV3, se proponen los siguientes retos:




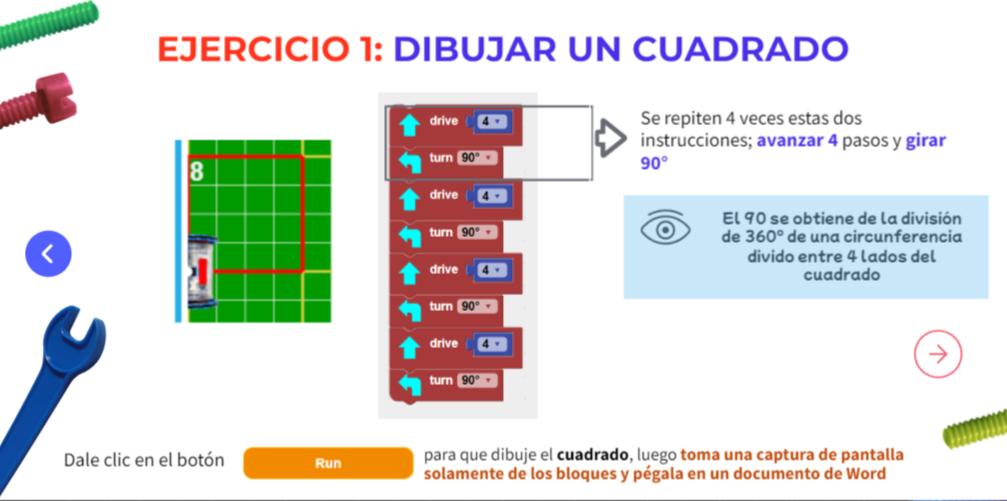
Para afianzar el manejo de las estructuras de programación y la elaboración de otras figuras geométricas se propuso realizar el siguiente ejercicio en la herramienta de simulación de robótica basada en la web llamada Roboblocky:






Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Ejes curriculares
Componente Formativo MFI
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
En proceso Mejorable Bien Excelente
Desarrollo Fase 4: Compartir
Establecer las conclusiones y alcances del proyecto. Comparte e intercambia los conocimientos aprendidos.
Blog, foros, conversatorios, enlaces públicos, folletos, afiches, informe en ofimática.
Bibliografía
https://education.lego.com/es-es/downloads/mindstorms-ev3/software/
https://le-www-live-s.legocdn.com/sc/media/files/user-guides/ev3/ev3_user_guide_esmx6ac740d3cdd578cc6a52d10d7d173da9.pdf
https://www.youtube.com/watch?v=iVUeAAMBLr8
https://www.youtube.com/watch?v=-SMlPAJ0YFs
https://www.youtube.com/watch?v=ULsRBRowNB0
https://www.youtube.com/watch?v=m4fZvsCmjiM
https://www.youtube.com/watch?v=F1b1OWgGnE0
Nombre del proyecto STEAM (Science, Technology, Engineering, Art and Mathematics):
Grado: 9°
Áreas de Integración: Matemáticas, Ciencias Naturales, Arte y Tecnología e Informática.
Estándar: Reconozco y valoro el impacto que los avances tecnológicos generan en la sociedad, a través del desarrollo de prototipos como parte de un proceso iterativo de diseño y programación.
Competencia a desarrollar: (se ingresan las competencias interdisciplinares que se desarrollan en el proyecto).
● Pensamiento T&I computacional y Maker
● Ciudadanía Digital y Tecnología en el enfoque STEAM
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema: (Problemática que se relacione con los ODS (Objetivos de desarrollo sostenible)).
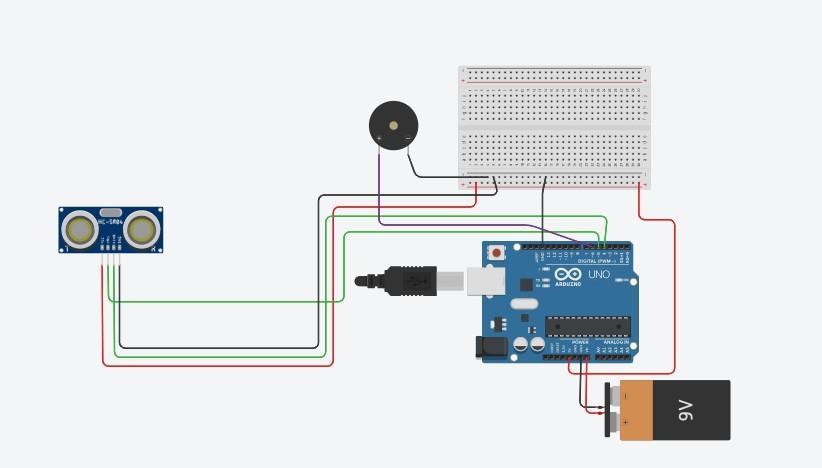
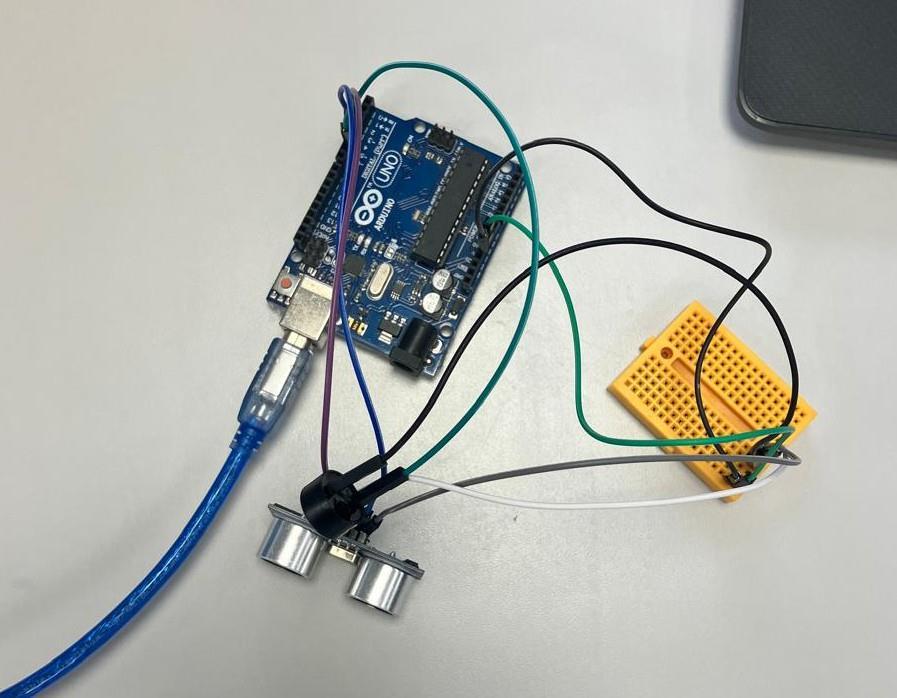
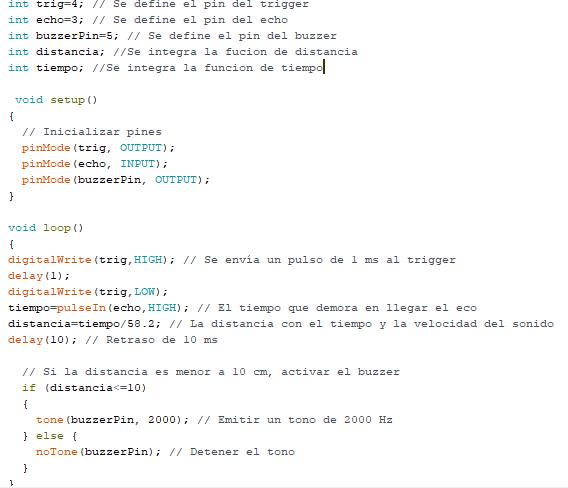
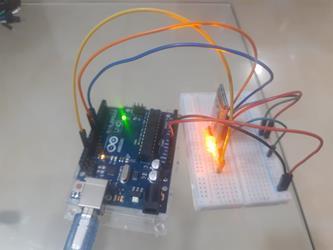
"Las ciudades actuales enfrentan múltiples retos relacionados con la sostenibilidad, la eficiencia energética, el monitoreo ambiental y la calidad de vida de sus habitantes. ¿Cómo podemos diseñar y programar soluciones automatizadas con tecnología Arduino que contribuyan al desarrollo de una ciudad inteligente, eficiente y sostenible?"
ODS relacionados:
● ODS 11: Ciudades y comunidades sostenibles
● ODS 9: Industria, innovación e infraestructura
● ODS 13: Acción por el clima
● ODS 3: Salud y bienestar (en el caso del monitoreo ambiental)
● Breve descripción: (Breve descripción de la problemática a desarrollar)
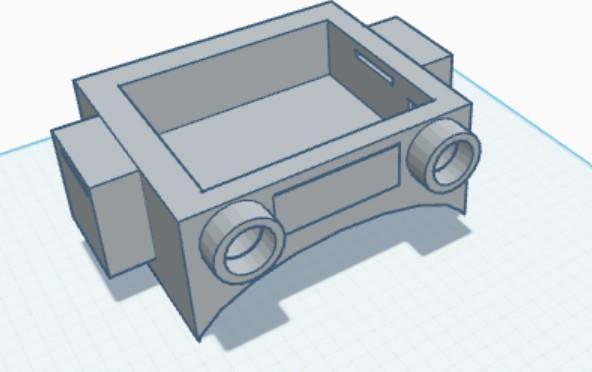
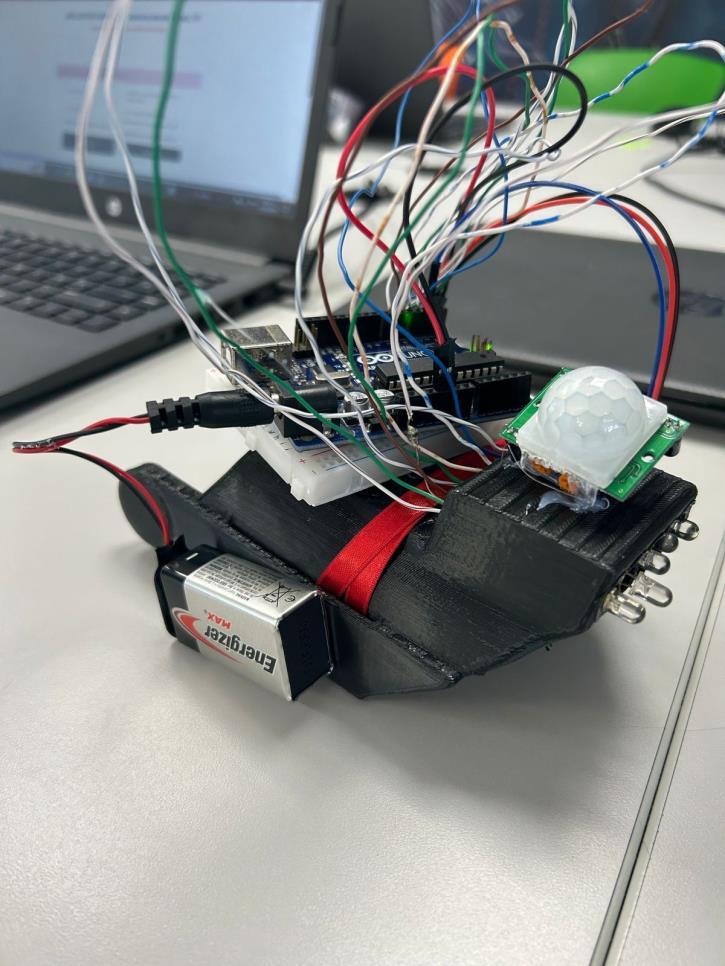
Este proyecto busca que los estudiantes desarrollen prototipos funcionales de una ciudad inteligente utilizando tecnología Arduino y componentes electrónicos. Cada grupo automatizará un escenario específico de la ciudad (por ejemplo: calidad del aire, iluminación pública, vehículo autónomo, etc.) integrando sensores, actuadores, simulaciones digitales y modelado 3D.
Los estudiantes aplicarán conocimientos STEAM en la creación de prototipos que combinen electrónica, programación, diseño, modelado y documentación técnica, fomentando el trabajo colaborativo y el pensamiento crítico con base en los ODS.
● Materiales: (Materiales utilizado en el desarrollo del proyecto – Software – Kits de robótica, dispositivos electrónicos)
Componentes electrónicos Arduino:
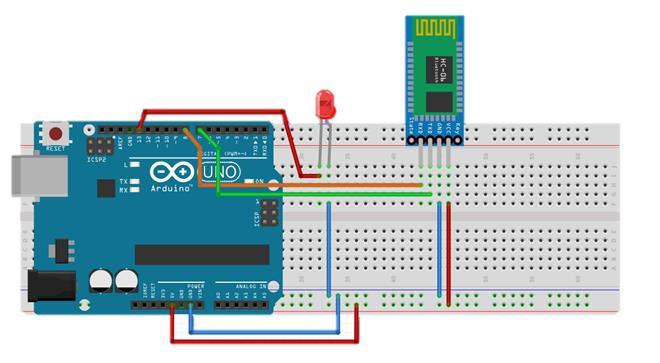
● Tarjeta Arduino UNO o similar
● Protoboard
● Cables de conexión (jumper macho-macho, macho-hembra)
● Resistencias (varias)
● Leds (varios colores)
● Fotorresistencias (LDR)
● Sensor ultrasónico (HC-SR04)
● Sensor de gas (MQ-2 u otro)
● Servomotor
● Potenciómetro
● Transistores (opcional según los diseños)
● Fuente de alimentación o batería
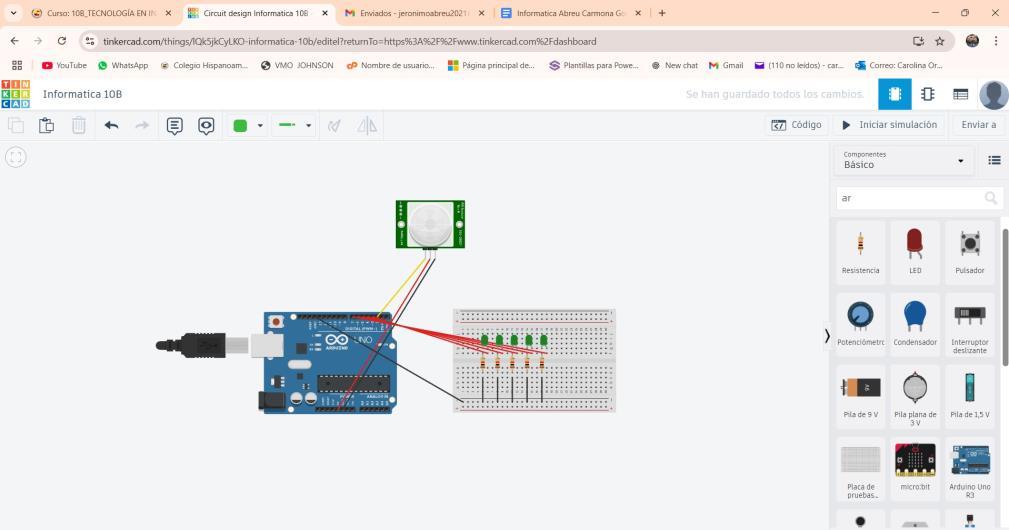
● PC con acceso a Tinkercad Circuits y Tinkercad 3D
Materiales para maqueta física:
● Cartón, foam, palos de paleta, silicona, cinta
● Pinturas, marcadores
● Impresora 3D (opcional)
● Elementos reciclables para simular edificios o estructuras
Desarrollo Fase 2: Creación Maker
Procedimiento:
Para el desarrollo del proyecto STEAM se requiere partir de la interacción entre la teoría y la práctica, la cual se realiza con base en el conocimiento pedagógico y didáctico de los docentes que orienta las asignaturas integradoras, el uso de los kits de robótica educativa y los dispositivos electrónicos con los que cuenta la institución. El uso de la plataforma Moodle con:
- videos motivadores
- videos tutoriales
- guías de desarrollo
- presentaciones online
- simuladores
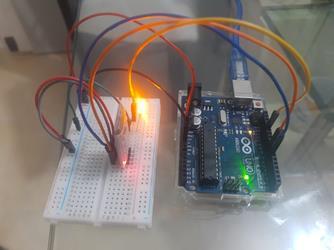
Fase 1: Fundamentos de Arduino y ciudades inteligentes
● Introducción a Arduino: concepto, estructura, lenguaje básico (C++)
● Uso de sensores y actuadores básicos
● ¿Qué es una ciudad inteligente? Ejemplos reales y retos actuales
● Exploración en Tinkercad Circuits para simulación electrónica
● Exploración en Tinkercad 3D para diseño de objetos
Fase 2: Organización de grupos y asignación de escenarios
● Formación de grupos de 3 o 4 estudiantes
● Asignación de un escenario de ciudad inteligente por grupo:
○ Monitoreo de calidad del aire
○ Iluminación pública inteligente
○ Estacionamiento inteligente
○ Parque infantil
○ Vehículo autónomo
○ Estación meteorológica
○ Edificio/Casa inteligente
Fase 3: Asignación de roles dentro del grupo
Cada grupo debe organizarse para cubrir los siguientes roles:
● Documentación:
○ Elaboración de un informe técnico del proyecto en formato APA
○ El documento incluirá: portada, resumen, justificación, problema, solución, desarrollo, código comentado, conclusiones y bibliografía.
● Conexiones y programación:
○ Diseño del circuito y simulación funcional en Tinkercad Circuits
○ Programación de la solución con bloques o código en C++
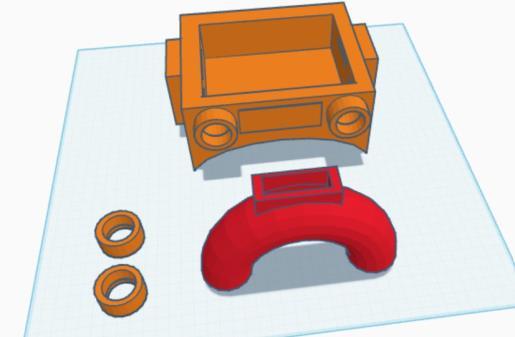
● Diseño 3D:
○ Creación de al menos 3 elementos del escenario en Tinkercad 3D (por ejemplo, luminarias, vehículos, sensores, estructuras)
● Conexiones físicas y maqueta:
○ Armado físico del escenario, con cableado y conexión real de sensores y actuadores
○ Construcción y decoración de la maqueta que representa la parte física de la ciudad
Fase 4: Desarrollo del proyecto
● Prototipado electrónico en Tinkercad
● Pruebas y ajustes del código
● Creación de diseños 3D del entorno
● Montaje de maqueta y ensamblado físico
● Registro fotográfico y de video de cada etapa
Fase 5: Presentación final y evaluación
● Cada grupo presenta su proyecto:
○ Problema identificado
○ Solución implementada
○ Simulación funcional (Tinkercad)
○ Diseño 3D
○ Maqueta
○ Informe final en formato APA
● Retroalimentación del docente y compañeros
● Evaluación basada en criterios técnicos, creatividad, funcionalidad, documentación y trabajo en equipo
Desarrollo Fase 3: Evaluación del proceso
Se evalúa de manera continua a lo largo del proyecto y se tiene en cuenta las siguientes Rúbrica de evaluación:
Ejes curriculares En proceso Mejorable Bien Excelente
Me resulta fácil trabajar en equipo con mis compañeros.
Respeto las decisiones que toma el equipo de trabajo.
Demuestro responsabilidad en el rol que desarrollo dentro del equipo de trabajo.
Exploración
Identifico la problemática a desarrollar en el proyecto STEAM.
Propongo soluciones creativas e innovadoras.
Creación Maker
Comprendo el funcionamiento de los dispositivos que utilizo en el desarrollo del proyecto.
Diseño, dibujo o gráfico alternativas de solución a la problemática.
Construyo prototipos físicos o virtuales que permitan dar solución a la problemática.
Competencias
Los estudiantes son capaces de evaluar soluciones de diseño rivales basándose en criterios y soluciones al problema planteado.
Compartir
Expreso de manera clara mis ideas.
Expreso pensamientos e ideas de manera oral o escrita en diferentes situaciones.
Desarrollo Fase 4: Compartir
Establecer las conclusiones y alcances del proyecto. Comparte e intercambia los conocimientos aprendidos.
Blog, foros, conversatorios, enlaces públicos, folletos, afiches, informe en ofimática.
Bibliografía
https://arduino.cl/principales-partes-de-unarduino/?srsltid=AfmBOoqBMuXsM4egNXZfeLJQWoWPbtqTDRwKrVHw9D3z7jtaCCyxM0w5
https://docs.arduino.cc/tutorials/uno-rev3/intro-to-board/
https://www.tinkercad.com/login
https://www.youtube.com/watch?v=BAfZWXbKrf0
https://www.youtube.com/watch?v=2NKoAE-WMUA
https://www.youtube.com/watch?v=htRDvJDN0Sk
https://www.youtube.com/watch?v=2oeXy0olb4M
https://www.youtube.com/watch?v=ZOmEEuLysCs
https://www.youtube.com/watch?v=5bEHd8h_p-k
Nombre del proyecto STEAM: Solución a problemáticas de los ODS con Arduino
Grado: Grado décimo
Docente: Eguibar Aldebith Astaiza Montilla
Áreas de Integración: Ciencias Sociales y Tecnología e Informática
Competencia a desarrollar:
-Pensamiento T&I computacional y Maker.
-Ciudadanía Digital y Tecnología en el enfoque STEAM.
Desde el modelo STEAM se potencializa el Modelo Formativo Institucional (MFI) mediante el desarrollo de valores como:
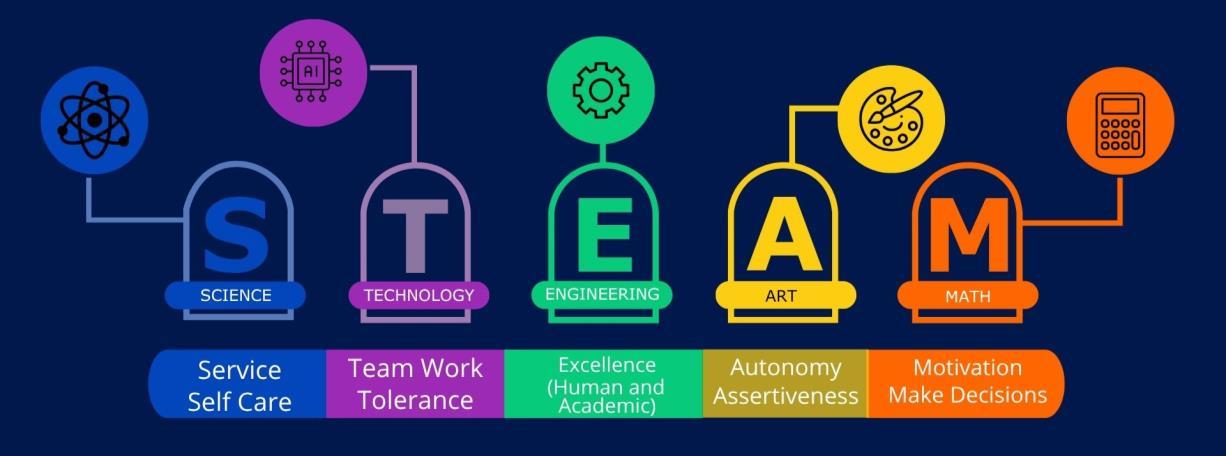
S T E A M
-Service -Self-care - Teamwork - Tolerance -Excellence (Human and Academic) -Autonomy Assertivene ss -Motivation -Make decisions
RUTA DIDÁCTICA
Fases del proyecto
1. Exploración: Definir el problema, hacer preguntas, identificar el problema e investigar.
2. Creación - Maker: Desarrollar posibles soluciones, planear, imaginar, probar y construir prototipos físicos y/o simulados.
3. Evaluación: Evidenciar el alcance de las competencias propuestas dando solución a los problemas planteados.
4. Compartir: Dar a conocer las soluciones a los problemas planteados.
Desarrollo Fase 1: Exploración
● Definir el problema:
● Desarrollar un proyecto de robótica STEAM que brinde apoyo a personas, animales y plantas con discapacidad, fomentando su inclusión y autonomía.
● Descripción:
Los objetivos de desarrollo sostenible son el fruto del consenso de 193 países que convocados por Naciones Unidas han establecido la hoja de ruta de la sostenibilidad para el año 2030.
Los objetivos son 17 los cuales se encuentran clasificados en cinco focos:
1. Personas
2. Planeta
3. Prosperidad
4. Paz
5. Alianzas
Objetivos de desarrollo sostenible (ODS)
1. Fin de la pobreza
2. Fin al hambre (Agricultura sostenible)
3. Vida sana
4. Educación inclusiva equitativa y de calidad
5. Igualdad entre los géneros
6. Disponibilidad de agua
7. Energía sostenible
8. Trabajo decente y crecimiento económico
9. Infraestructura e industria
10. Reducción de las desigualdades
11. Ciudades sostenibles
12. Garantizar modalidades de consumo y producción sostenibles
13. Combatir el cambio climático
14. Vida submarina
15. Vida de ecosistemas terrestres
16. Paz y justicia para todos
17. Fortalecer las alianzas
Contextualización
Los Objetivos de Desarrollo Sostenible, también conocidos como Objetivos Mundiales, se adoptaron por todos los Estados Miembros en 2015 como un llamado universal para poner fin a la pobreza, proteger el planeta y garantizar que todas las personas gocen de paz y prosperidad para 2030.
Los 17 ODS están integrados, ya que reconocen que las intervenciones en un área afectarán los resultados de otras y que el desarrollo debe equilibrar la sostenibilidad medio ambiental, económica y social.
Siguiendo la promesa de no dejar a nadie atrás, los países se han comprometido a acelerar el progreso para aquellos más atrasados. Es por esto que los ODS han sido diseñados para traer al mundo varios “ceros” que cambien la vida, lo que incluye pobreza cero, hambre cero, SIDA cero y discriminación cero contra las mujeres y niñas.
Todo el mundo es necesario para alcanzar estos objetivos ambiciosos. Se necesita la creatividad, el conocimiento, la tecnología y los recursos financieros de toda la sociedad para conseguir los ODS en cada contexto.
Desarrollo Fase 2: Creación Maker
Procedimiento:
Proyecto: facilitar la asistencia y cuidado de una persona con discapacidad del habla
Descripción General
Nuestro proyecto consiste en una alternativa para facilitar la asistencia y cuidado de una persona con discapacidad del habla, el cual en algunas ocasiones puede no llegar a hacerse entender con sus familiares o cuidadores y sentirse excluido o frustrado por su discapacidad. Por ello, nosotros realizamos un sistema básico de asistencia, en el cual la persona afectada, con poner su mano sobre una superficie determinada, ilumina un led que indica una acción básica como: comer, ir al baño, ayuda, ducharse y cambiarse.
Análisis problemática
En 2021, 460.000 personas en Colombia se autoidentificaron como personas con algún nivel de discapacidad auditiva, de los cuales se estima que más de 55.000 personas en Colombia se comunican exclusivamente con lengua de señas. Estos colombianos se ven afectados esencialmente en dos ejes: problemas de comunicación, debido al desconocimiento de la lengua de señas por parte de las personas oyentes, y problemas de discriminación y exclusión social.
Basado en estas problemáticas, nuestro proyecto conlleva su importancia debido, a que trata de cumplir con el Objetivo de Desarrollo Sostenible (ODS) número 10, que se titula “Reducción de las Desigualdades”, al ofrecer una vía más fácil de que las personas Mudas puedan “hablar” y comunicarse con sus familiares; reduciendo así la exclusión del discapacitado.
Investigación Preliminar
En una investigación de la Universidad Pontificia Javeriana (2023), se tomaron referencia de dos personas sordo-mudas, quienes según su traducción literal de lenguaje de señas a palabras, manifiestan lo siguiente:
“[…] yo hago gestos. Si, le hago gestos si tengo algún dolor y ya la persona se da cuenta […] y disminuye lo que sea que esté haciendo, y ya esta persona mira cómo solucionarlo. Eso es lenguaje no verbal, la expresión, el gesto, el movimiento corporal, y ya la persona me ve y se dará cuenta”.
“Entonces la dificultad principalmente, comunicarse con todas las personas para saber qué es lo que desean o que necesitan, ojalá haya una formación.
En estos dos apartados, podemos identificar un punto en común y es la dificultad para expresarse con otras personas, manifestando que en muchos casos no es clara la comunicación por medios de gestos y movimientos corporales.
Diseño del Prototipo
Para el diseño 3D del prototipo, se usó la inteligencia Artificial de Meshy, en la cual utilizamos el siguiente prompt: “Genera un cubo de 7 centímetros de ancho, 7 de largo y 6 de alto, el cual que en la parte superior tenga un corte rectangular de 6 centímetros de largo, 4 de ancho y 4 de alto”; generando el siguiente diseño.


El diseño dado por Meshy AI, presentaba algunas fallas estructurales que corregimos en el software de diseño 3D Tinkercad, en el cual rellenamos completamente la base y una cara del cubo, además de agregarle una capa en la cara superior y le realizamos un círculo, por el que pasarán los cables de conexión del sensor ultrasónico.
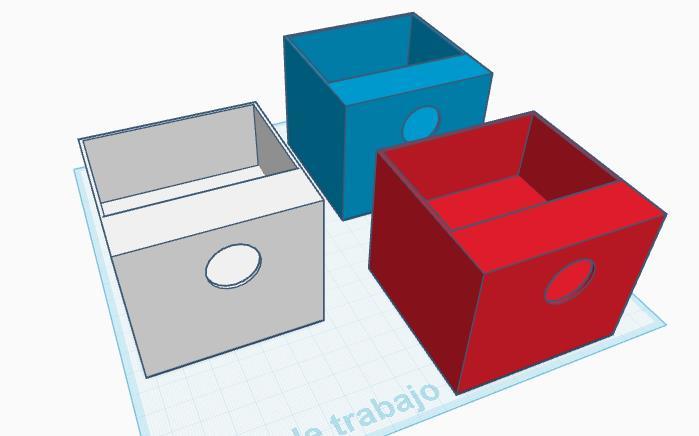


Código
// Definición de pines para los sensores ultrasónicos
int trigledca = 4; // Pin TRIG para el sensor 1 (Comer)
int echoledca = 3; // Pin ECHO para el se|nsor 1 (Comer)
int trigledba = 6; // Pin TRIG para el sensor 2 (Ir al baño)
int echoledba = 5; // Pin ECHO para el sensor 2 (Ir al baño)
int trigledar = 8; // Pin TRIG para el sensor 3 (Ayuda)
int echoledar = 7; // Pin ECHO para el sensor 3 (Ayuda)
// Definición de pines para los LEDs
int ledca = 9; // Pin LED para el sensor 1 (Comer) - Amarillo
int ledba = 10; // Pin LED para el sensor 2 (Ir al baño) - Azul
int ledar = 11; // Pin LED para el sensor 3 (Ayuda) - Rojo
// Variables de las distancias y duraciones int distancialedca; int distancialedba; int distancialedar; int duracionledca; int duracionledba; int duracionledar;
void setup()
{
// Inicialización de pines como entradas o salidas
pinMode(trigledca, OUTPUT);
pinMode(trigledba, OUTPUT);
pinMode(trigledar, OUTPUT);
pinMode(echoledca, INPUT);
pinMode(echoledba, INPUT);
pinMode(echoledar, INPUT);
// Inicialización de la comunicación serial
Serial.begin(9600);
} void loop()
{ // Lectura del sensor 1 (Comer)
digitalWrite(trigledca, HIGH);
delayMicroseconds(10);
digitalWrite(trigledca, LOW);
duracionledca = pulseIn(echoledca, HIGH); distancialedca = duracionledca / 58.2;
// Lectura del sensor 2 (Ir al baño)
digitalWrite(trigledba, HIGH);
delayMicroseconds(10);
digitalWrite(trigledba, LOW);
duracionledba = pulseIn(echoledba, HIGH);
distancialedba = duracionledba / 58.2;
// Lectura del sensor 3 (Ayuda)
digitalWrite(trigledar, HIGH);
delayMicroseconds(10);
digitalWrite(trigledar, LOW);
duracionledar = pulseIn(echoledar, HIGH);
distancialedar = duracionledar / 58.2;
// Impresión de las distancias en el monitor serie
Serial.print("Comer: ");
Serial.print(distancialedca);
Serial.print(" cm, Baño: ");
Serial.print(distancialedba);
Serial.print(" cm, Ayuda: ");
Serial.print(distancialedar);
Serial.println(" cm");
// Encendido de LEDs según la distancia de sus sensores
if (distancialedca <= 5)
{ digitalWrite(ledca, HIGH);
digitalWrite(ledba, LOW);
digitalWrite(ledar, LOW);
else if (distancialedba <= 5)
{ digitalWrite(ledca, LOW); digitalWrite(ledba, HIGH); digitalWrite(ledar, LOW); } else if (distancialedar <= 5)
{ digitalWrite(ledca, LOW); digitalWrite(ledba, LOW); digitalWrite(ledar, HIGH); } else
{ digitalWrite(ledca, LOW); digitalWrite(ledba, LOW); digitalWrite(ledar, LOW); } delay(100); // Retraso de 100 ms }
Fabricación con Impresión 3D
Para la impresión 3D, hemos utilizado el software Voxel Maker, el cual hemos utilizado para la impresión de nuestro diseño 3D, ya que es muy fácil de usar y presenta funciones de autosoporte bastante útiles, lo cual nos pareció más eficiente.
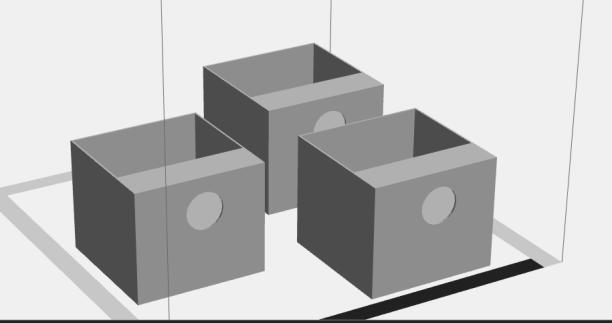
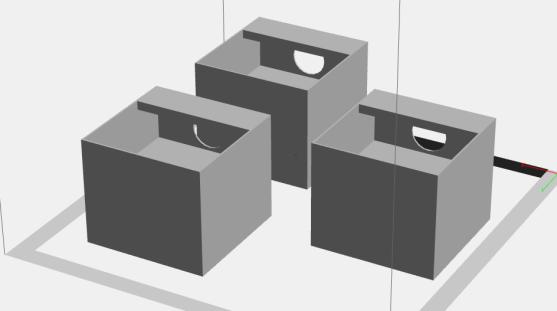
Cálculo de Impresión 3D
Pieza 3D Tiemp o (horas ) Medida filamento (metros) Dimensione s (cm) Resolució n Porcentaj e Relleno Velocidad de impresión
Caja A 7,80 21,80 7x7x6 Estándar 15% 80nm/s
Caja B 7,80 21,80 7x7x6 Estándar 15% 80nm/s
Caja C 7,80 21,80 7x7x6 Estándar 15% 80nm/s
Total: 23,40 65,4
Ficha Técnica Sensor
Sensores Ultrasónico
Ensamblaje y Pruebas
Características Cuando detecta la cercanía de la mano del usuario, enciende un led de cierto color para que el asistente sepa la necesidad que necesita la persona sorda
Voltaje 5 V
Imagen

Circuito Funcional
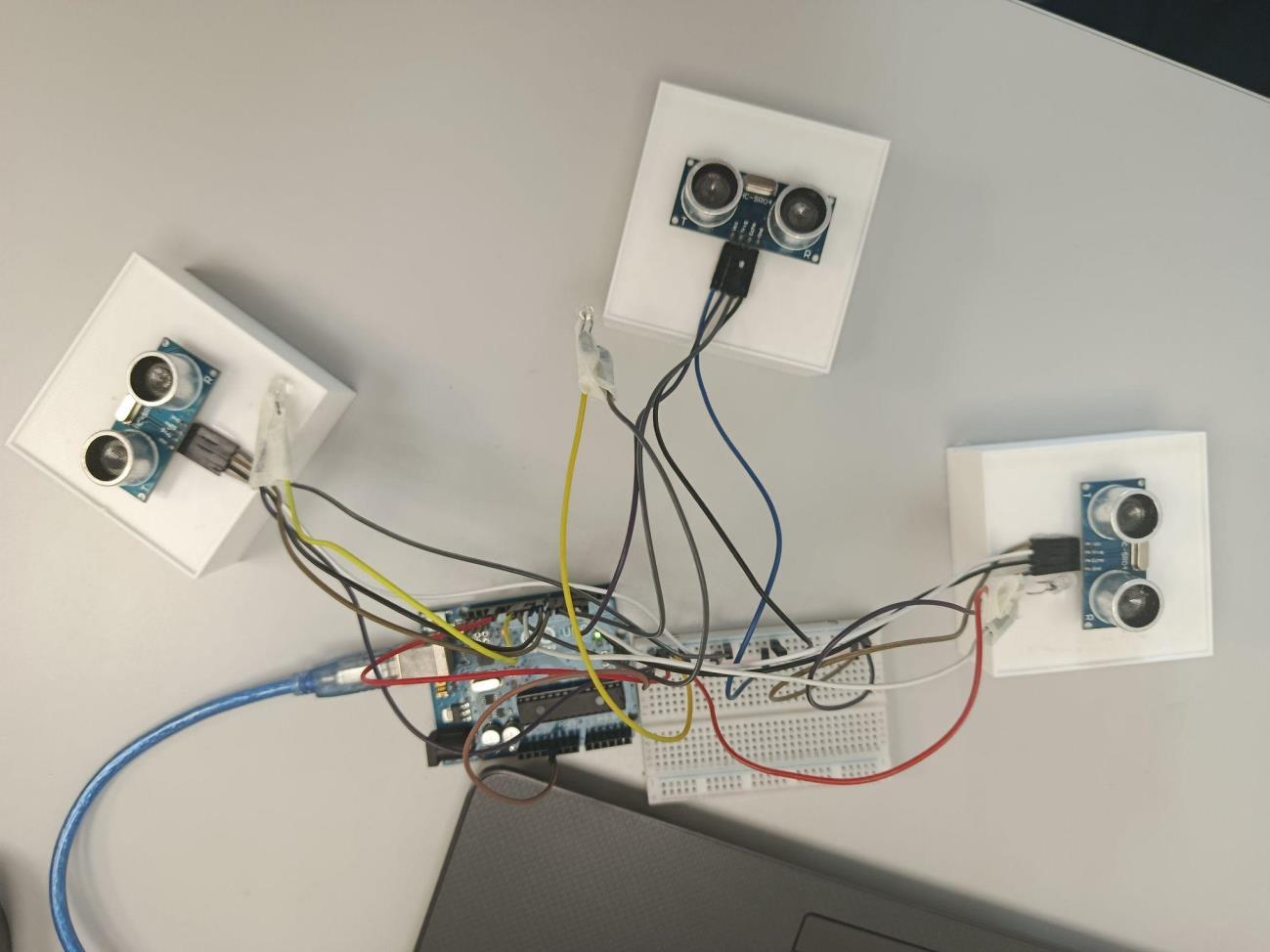
Resultados y Conclusiones
A través de este proyecto, nos quedan bastantes enseñanzas para tener en cuenta para la vida. Entre ellas nos parece destacable la inclusión de personas con discapacidad, evidenciando que todos podemos convivir en sociedad sin tener que excluir o discriminar a estas personas. Por otra parte, nos sentimos orgullosos de nuestro proyecto, ya que al final cumplió con todas nuestras expectativas y esperamos que pueda ser usado en diversos centros asistenciales para que cumpla con su función: servir para los demás que lo necesitan. Evaluando nuestro prototipo, encontramos que cumple con todas nuestras ideas iniciales. A pesar de que encontramos dificultades en la impresión 3D, lo cual tratamos de mejorar, sin embargo, decidimos ajustar el proyecto al modelo que se imprimió para no desperdiciar el material utilizado.
Mirando hacia el futuro, esperamos que nuestro proyecto tenga múltiples funcionalidades. Por ahora, nosotros minimizamos su efecto solo para personas Mudas, sin embargo, esperamos que en unos años este proyecto sea más accesible para todas las personas que presenten una discapacidad; por ejemplo en personas ciegas para que en vez de alumbrar un led, emita un sonido que les permita distinguir diversas acciones.
Proyecto 2 de robótica STEAM al servicio de la inclusión
Introducción
Nuestro proyecto busca desarrollar una prótesis craneal ajustable para bebés con deformidades como plagiocefalia y braquicefalia. Estas condiciones pueden afectar la simetría y el desarrollo craneal si no se tratan a tiempo.Las soluciones actuales pueden ser costosas, incómodas y difíciles de adaptar al crecimiento del bebé, lo que limita su uso. Por ello, este proyecto propone una alternativa ergonómica, ligera y transpirable, que se ajuste dinámicamente al crecimiento del bebé y facilite la corrección de la deformidad de manera efectiva y cómoda.El objetivo principal es diseñar una solución accesible y eficiente que mejore la calidad de vida del bebé y brinde tranquilidad a los padres, asegurando un tratamiento seguro, economico en comparacion a los demas por su capacidad ajustable y no invasivo.
Desarrollo del Proyecto
1.1. Análisis de la Problemática
Las deformidades craneales en bebés, como la plagiocefalia y la braquicefalia, son cada vez más comunes debido a factores como la exposición prolongada al dormir o condiciones congénitas. Si no se tratan a tiempo, pueden afectar la simetría del cráneo y, en algunos casos, el desarrollo del bebé. Actualmente, el tratamiento más utilizado son los cascos ortopédicos, pero estos presentan varias limitaciones, ya que pueden ser incómodos, calurosos y difíciles de ajustar al rápido crecimiento del bebé. Además, su alto costo hace que muchasfamilias no puedan acceder a ellos, lo que dificulta la continuidad del tratamiento y reduce su efectividad. Ante esta problemática, surge la necesidad de desarrollar una prótesis craneal ajustable que brinde una alternativa más cómoda, accesible y eficiente. Este prototipo se diseñará con materiales ligeros y transpirables, priorizando la ergonomía y la facilidad de ajuste para que se adapte al crecimiento del bebé sin causar molestias. De esta manera, se busca mejorar la experiencia de uso y garantizar que el
tratamiento sea más llevadero tanto para el bebé como para sus padres. Con este desarrollo, se espera ofrecer una solución innovadora y asequible que ayude a corregir estas deformidades de manera segura y efectiva, mejorando la calidad de vida de los bebés y facilitando el acceso a un tratamiento adecuado para más familias.
Fases del Proyecto
● Investigación Preliminar: Se realizó un análisis profundo sobre las deformidades craneales en bebés, como la plagiocefalia y braquicefalia. Se identificó la necesidad de una prótesis craneal ajustable que permita un tratamiento efectivo, cómodo y accesible, considerando las limitaciones de las soluciones ortopédicas convencionales.
● Diseño del Prototipo: Usamos programas de diseño 3D como Tinkercad y VoxelMaker para crear un modelo de casco especial que sea cómodo, liviano y fácil de ajustar a medida que el bebé crece.
● Programación y Control: En esta parte, le agregamos un sensor cardíaco al casco para poder monitorear el ritmo cardíaco del bebé mientras lo usa. Si el ritmo cardíaco se sale de lo normal, se enciende un LED como señal de alerta para que los padres estén atentos. Esto ayuda a tener un control adicional sobre la salud del bebé mientras lleva puesto el casco.
● Fabricación con Impresión 3D: Se optimizó la estructura para facilitar su uso y mejorar la distribución de los componentes electrónicos.
● Ensamblaje y Pruebas: Armamos el prototipo y lo probamos para ver si se ajusta bien, es cómodo y funciona como queremos. También nos aseguramos de que se pueda adaptar fácilmente al crecimiento del bebé y que el sensor y el LED funcionen correctamente.
● Presentación Final: Mostraremos cómo esta idea puede ayudar a muchas familias, haciendo el tratamiento más accesible y mejorando la vida de los bebés que lo necesitan.
Ficha Técnica del Sensor
● Modelo: Sensor de pulso cardiaco (KY-039)
● Características: Permite medir la actividad eléctrica o las señales del corazón, y son muy útiles para proyectos de salud y monitoreo como el nuestro.
● Voltaje de operación: 3.3V a 5V.
● Conexión: VCC(Positivo), GND(Negativo)
Lista de Materiales (BOM) según el proyecto y código proporcionado
Sensor de Pulso Cardíaco (KY-039)
○ Características: Sensor infrarrojo que detecta los latidos del corazón al medir cambios en la luz reflejada por la piel.
○ Voltaje de operación: 3.3V a 5V.
Conexión:
LED Verde
■ VCC: Conectar al pin de 5V del Arduino.
■ GND: Conectar al pin GND del Arduino.
■ Señal (S): Conectar al pin analógico A0 del Arduino.
○ Función: Indica que la frecuencia cardíaca está dentro del rango normal (100 - 160 BPM)
○ Voltaje de operación: Aproximadamente 2V.
Conexión:
■ Ánodo (+): Conectar al pin digital 8 del Arduino a través de una resistencia de 220 ohms
■ Cátodo (−): Conectar al GND del Arduino.
LED Rojo
○ Función: Indica que la frecuencia cardíaca está fuera del rango normal.
○ Voltaje de operación: Aproximadamente 2V.
Conexión:
■ Ánodo (+): Conectar al pin digital 9 del Arduino a través de una resistencia de 220 ohms
■ Cátodo (−): Conectar al GND del Arduino.
Pantalla OLED I2C (SSD1306, 128x64 píxeles)
○ Características: Muestra el valor actual de BPM, el estado ("Normal" o "Alerta") y un gráfico en tiempo real del pulso.
○ Voltaje de operación: 3.3V o 5V.
Conexión:
■ VCC: Conectar a 3.3V o 5V del Arduino.
■ GND: Conectar a GND del Arduino.
■ SCL: Conectar al pin A5 del Arduino (I2C Clock).
■ SDA: Conectar al pin A4 del Arduino (I2C Data).
Arduino Uno
○ Características: Microcontrolador ATmega328P. Se encarga de leer el sensor, calcular BPM, controlar LEDs y mostrar datos en la OLED.
Voltaje de operación: 5V.
○ Conexiones clave:
■ A0: Entrada del sensor KY-039.
■ A4 (SDA): Comunicación I2C con OLED.
■ A5 (SCL): Comunicación I2C con OLED.
■ D8: Control del LED verde.
■ D9: Control del LED rojo.
Protoboard (Breadboard)
○ Características: Facilita conexiones sin soldadura para prototipado rápido.
○ Voltaje de operación: 5V (derivado del Arduino).
Uso en el proyecto:
■ Distribuye 5V y GND desde el Arduino a todos los componentes.
■ Permite conectar fácilmente el sensor, LEDs y pantalla OLED.
Circuito Funcional
1.2. Código Utilizado
#include <Wire.h>
#include<Adafruit_SSD1306.h>
#include <Adafruit_GFX.h>
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
const int sensorPin = A0; const int ledVerde = 8;
const int ledRojo = 9; int pulso = 0; int frecuencia = 0; long tiempoAnterior = 0;
// Variables para graficar el pulso int x = 0; int y = 32;
// Rango normal de pulsaciones por minuto (BPM) para un bebé const int bpmMin = 100;
const int bpmMax = 160;
void dibujarCorazon() {
display fillCircle(20, 20, 6, SSD1306_WHITE); // Parte izquierda del corazón display.fillCircle(36, 20, 6, SSD1306_WHITE); // Parte derecha del corazón
display fillTriangle(14, 22, 42, 22, 28, 45, SSD1306_WHITE); // Punta del corazón
void graficarPulso(int valor) { display.drawLine(x, y, x + 1, 32 - valor, SSD1306_WHITE); x++;
if (x >= SCREEN_WIDTH) { x = 0;
display.clearDisplay(); dibujarCorazon();
} y = 32 - valor; }
void setup() { pinMode(sensorPin,INPUT); pinMode(ledVerde,OUTPUT); pinMode(ledRojo, OUTPUT); Serial.begin(9600);
if (!display begin(SSD1306_SWITCHCAPVCC, 0x3C)) { Serial.println("¡Fallo al iniciar OLED!"); for (;;);
}
display clearDisplay(); display.setTextSize(1);
display setTextColor(SSD1306_WHITE); dibujarCorazon();
display display(); delay(1000); }
void loop() { pulso =analogRead(sensorPin); if (pulso > 500) { long tiempoActual = millis();
frecuencia = 60000 / (tiempoActual - tiempoAnterior); tiempoAnterior = tiempoActual;
Serial.print("Frecuencia:"); Serial.println(frecuencia);
display.setCursor(60,0); display print("BPM: "); display.println(frecuencia);
if (frecuencia >= bpmMin && frecuencia <= bpmMax) {
digitalWrite(ledVerde, HIGH);
digitalWrite(ledRojo, LOW); display.print(" Normal ");
} else {
digitalWrite(ledVerde, LOW); digitalWrite(ledRojo, HIGH); display.print(" Alerta ");
graficarPulso(map(pulso, 500, 1023, 0, 20)); display display(); } delay(50);
2. Modelado 3D

2.1.

3. Resultados y Conclusiones
El casco craneal ajustable ha demostrado ser una alternativa práctica y funcional para el tratamiento de deformidades como la plagiocefalia y braquicefalia en bebés. Durante las pruebas realizadas, el diseño mostró un buen nivel de comodidad, adaptación al crecimiento y facilidad de uso. La incorporación del sensor cardíaco como sistema de monitoreo adicional también aportó un valor importante al ofrecer una señal de alerta en caso de detectar un ritmo cardíaco anormal. Sin embargo, se identificó la oportunidad de seguir mejorando el diseño, incorporando elementos que faciliten aún más el ensamblaje, la ventilación y la integración estética de los componentes electrónicos, garantizando una solución aún más completa y eficiente para las familias que lo necesiten.
Proyecto 3
INTRODUCCIÓN
Proyecto de Robótica STEAM: Hora de Beber
Este proyecto consta de un sistema para las plantas con macetas. Se basa en un sistema electrónico programado para avisar a las personas cuando tienen que regar sus plantas. Este sistema consiste en un circuito que, con ayuda de un sensor de humedad, enciende un bombillo LED para indicar que es el momento de echarle agua a la planta y así mantenerla con la hidratación necesaria. Funciona de tal manera que cuando el sensor detecta baja humedad, se enciende el bombillo notificando la necesidad de agua.
Este proyecto es importante ya que permite mantener a las plantas en buen estado, aumentando su longevidad y su apariencia haciendo que decoren mejor los espacios. Su objetivo es ser útil para personas mayores que puedan tener problemas de memoria, al igual que para personas muy ocupadas que sean propensos a olvidar el cuidado de sus plantas o también para plantas que requieran un cuidado muy especial. Esto además contribuye al medio ambiente y permite conservar el buen estado de los entornos naturales.
DESARROLLO DEL PROYECTO
Análisis de la problemática
Problema que resuelve:
Falta de conocimiento sobre las necesidades de las plantas: Muchas personas no saben con precisión cuándo es el momento adecuado para regar una planta. Las necesidades de riego pueden variar dependiendo del tipo de planta y las condiciones ambientales, lo que hace difícil para un dueño de planta determinar cuándo es necesario regar. Este circuito resuelve esa problemática, avisando visualmente cuando el nivel de humedad está bajo.
Olvido de regar las plantas: Las personas a menudo se olvidan de regar sus plantas o no tienen una rutina clara para hacerlo. El LED que se enciende cuando la humedad está baja actúa como un recordatorio visual que avisa al usuario de la necesidad de regar las plantas, evitando que se olviden.
Riego excesivo o insuficiente: Regar demasiado o muy poco a las plantas puede dañarlas. Un sensor que mide la humedad ayuda a evitar ambos extremos. Al avisar cuando el nivel de humedad es bajo, el sistema guía al usuario para que riegue solo cuando sea necesario, evitando el riego en exceso ymejorando la salud de las plantas.
Justificación de la necesidad del prototipo:
Facilidad de uso: Un circuito con un sensor de humedad es simple y fácil de implementar, lo que lo convierte en una solución accesible para una amplia gama de personas, incluidos aquellos con poca experiencia en jardinería.
Eficiencia en el cuidado de las plantas: El uso de tecnología para monitorear las plantas ayuda a los usuarios a asegurarse de que sus plantas reciban la cantidad adecuada de agua. Esto puede resultar en plantas más saludables y de mayor longevidad, lo cual es especialmente importante para personas que tienen muchas plantas en su hogar o jardín.
Reducción de preocupaciones: Este prototipo alivia la preocupación constante de si las plantas están recibiendo el cuidado adecuado, brindando un sistema de alerta confiable para que los usuarios no tengan que estar pendientes todo el tiempo del nivel de humedad.
Fases del proyecto
Explicación de cada una de las fases:
Investigación Preliminar: La idea nos surgió desde experiencias personales que suceden en casa, al muchas veces olvidar por completo cuando hay que regar las plantas, además de haber experimentado la muerte de algunas de nuestras matas.
Diseño del Prototipo:
Programación y Control: const int sensorPin = A0; // const int ledPin = 13; // const int umbralHumedad = 800; void setup() { pinMode(ledPin, OUTPUT); Serial.begin(9600); // }
void loop() { int humedad = analogRead(sensorPin);
Serial.print("Humedad del suelo: "); Serial.println(humedad); if (humedad > umbralHumedad) { digitalWrite(ledPin, HIGH); delay(10000); } else { digitalWrite(ledPin, LOW); // } delay(1000); // } 3.8
Fabricación con Impresión 3D: No utilizamos IA, el diseño fue creado manualmente en Tinckercard.
Ensamblaje y Pruebas:




al principio las paredes de nuestra caja estaban muy gruesas y requerían mucho filamento y tiempo, así que reducimos las dimensiones para ahorrar estos dos factores y optimizar el proceso.
Presentación Final: Tiene un impacto positivo en diversos aspectos. Desde el punto de vista técnico, mejora la eficiencia operativa al automatizar el proceso de riego, reduciendo la intervención manual y asegurando un control más preciso. Además, contribuye a la conservación del agua, ya que solo activa el riego cuando es necesario, lo que también representa un ahorro económico en términos de recursos y costos operativos. La tecnología es accesible y fácil de implementar, lo que permite su adopción tanto por aficionados a la jardinería como por pequeños negocios o instituciones educativas.
Desde una perspectiva social y ambiental, el sistema fomenta el uso responsable del agua y la sostenibilidad, promoviendo una mayor conciencia sobre la conservación de recursos naturales. También ofrece beneficios educativos al ser una herramienta sencilla que permite aprender sobre el cuidado de las plantas y el uso de tecnologías verdes. Sin embargo, algunos desafíos incluyen la fiabilidad del sensor y la necesidad de una fuente de energía constante. En general, el proyecto es una solución accesible, eficaz y sostenible para optimizar el cuidado de las plantas y reducir el desperdicio de agua.
Ficha Técnica de los Sensores Utilizados
Tarjeta Arduino (Modelo: Arduino Uno R3)
Características: Microcontrolador ATmega328P, 14 pines digitales (6 PWM), 6 entradas analógicas.
Voltaje: 5V (operativo), entrada de 7V – 12V.
Conexión: USB tipo B o entrada de voltaje con jack de 2.1mm, pines de entrada/salida.
Protoboard (Modelo: 830 puntos)
Características: Base de pruebas sin soldadura, filas y columnas interconectadas internamente.
Voltaje: Soporta hasta 12V.
Conexión: Pines insertados en los orificios, líneas de alimentación en los laterales.
Sensor de Humedad (Modelo: DHT11)
Características: Mide humedad (20% - 90%) y temperatura (0°C - 50°C), precisión ±5%.
Voltaje: 3.3V – 5V.
Conexión: 3 pines (VCC, GND, DATA), salida digital.
Resistencia de 220Ω
Características: Limita la corriente en circuitos, tolerancia del 5%.
Voltaje: Depende del circuito (usada en 5V y 3.3V con LEDs).
Conexión: En serie con LED u otros componentes.
LED Blanco (Modelo: 5mm)
Características: Diodo emisor de luz blanca, alto brillo, ángulo de emisión variable.
Voltage: 3V – 3.5V.
Conexión: Ánodo (+) a positivo con resistencia, cátodo (-) a tierra.
Cable Macho-Macho
Características: Cable flexible con pines en ambos extremos, útil para conexiones directas.
Voltaje: Hasta 12V.
Conexión: Desde pines de Arduino a protoboard o sensores.
Cable Macho-Hembra
Características: Un extremo con pin (macho) y otro con conector (hembra).
Voltaje: Hasta 12V.
Conexión: Desde pines de Arduino a módulos o sensores con conector hembra.
Diagrama Esquemático
Circuito Funcional

Código Utilizado
const int sensorPin = A0; const int ledPin = 13; / const int umbralHumedad = 800;
void setup() { pinMode(ledPin, OUTPUT); Serial.begin(9600);
void loop() { int humedad = analogRead(sensorPin);

Serial.print("Humedad del suelo: "); Serial.println(humedad);
if (humedad > umbralHumedad) { digitalWrite(ledPin, HIGH); delay(10000); } else { digitalWrite(ledPin, LOW); } delay(1000); } 3.8
Cálculo Impresión 3D

Resultados y Conclusiones
La evaluación del funcionamiento del prototipo ha demostrado que el sistema cumple con su propósito de alertar eficazmente a los usuarios sobre la necesidad de riego mediante la activación del LED cuando la humedad del suelo es baja. Sin embargo, se podrían realizar mejoras como la incorporación de una señal sonora para usuarios con dificultades visuales, la integración con una aplicación móvil para notificaciones remotas o la automatización del riego con una bomba de agua. En cuanto a sus aplicaciones futuras, este sistema podría adaptarse para su uso en jardines verticales, invernaderos o cultivos urbanos, optimizando el consumo de agua y facilitando el cuidado de las plantas en entornos domésticos y comerciales.
Proyecto
4
Prótesis de un dedo
Introducción:
Para nuestro proyecto decidimos realizar la prótesis de un dedo, debido a que es una parte fundamental de la vida diaria de las personas y que, sin este, muchas actividades cotidianas no podrían realizarse de manera correcta. El proyecto tiene como función reemplazar un dedo, en este caso el índice, buscando mejorar la calidad vida de la persona que haya perdido aquella parte del cuerpo, bien sea en un accidente, un problema médico, entre otros aspectos, haciendo que pueda recobrar la funcionalidad, la estética e incluso seguridad.
Análisis de la Problemática:
En primer lugar, en caso de haber perdido un dedo a través de una enfermedad, un accidente o una infección existen diferentes tipos de riesgos tales como lesiones adicionales, roces o hasta infecciones, pero si está protegido de forma adecuada esto no sucedería, por ende, este serviría como un medio de protección y siendo esta una de las principales funciones de la prótesis. Además, al no ser una prótesis rígida, ayudaría a la funcionalidad y movilidad del dedo, permitiendo actividades básicas como agarrar o señalar. También, es fundamental porque recuperando la forma o apariencia del dedo e incluso la mano, se podría recobrar su funcionalidad y estética.
Adicionalmente, permite una mejora a la calidad de vida, principalmente porque facilita a las personas que han perdido su dedo realizar tareas con mayor facilidad y comodidad, como escribir, comer, o sujetar objetos. La pérdida de un dedo puede tener un impacto significativo grave. Usando una prótesis, el estrés psicológico puede ser evitado, proporcionando una sensación de normalidad y aumentando la confianza en la persona. Para las personas que necesitan usar las manos para su trabajo o para interactuar socialmente, una prótesis les permite formar parte más fácilmente de sus actividades cotidianas y de su entorno profesional. En caso de no tener algún tipo de prótesis podría generar alteraciones o deformaciones en el resto de dedos y al tener la prótesis evitará este tipo de reacciones que pueden llegar a tener consecuencias peligrosas.
Fases del proyecto:
- Investigación preliminar: El primer paso fue la revisión de los casos y tomamos la toma decisiones con respecto a la realización de la prótesis del dedo, considerando que es de gran necesidad, pues genera un impacto muy negativo para las personas carecen de un dedo funcional y aún no tienen ninguna prótesis.
- Diseños del prototipo: Hicimos una ardua búsqueda de modelos 3d de prototipos de este estilo en Thingiverse para la selección de diseños útiles, seguros y adaptativos, buscando un buen diseño.
- Programación y Control: Trabajamos con Tinkercad, ya que es mucho más práctico y perfecto porque conseguimos manejar las piezas de manera muy sencilla. También programamos el código en Tinkercad para la interacción del dispositivo. Posteriormente, fue descargado y probado en el modelo físico.
- Fabricación con Impresión 3D: Thingiverse nos permitió seleccionar un modelo útil, bueno y seguro que posteriormente enviamos a imprimir según las partes que nos brindó.
- Ensamblaje y Pruebas: Realizamos el Ensamblaje buscando y revisando las posibles mejoras con base en pruebas funcionales.
- Presentación Final: Planteamos los beneficios del proyecto y presentamos el prototipo de impresión 3D con el ensamblaje de Arduino que se encuentra funcionando correctamente.
Beneficios del Proyecto
Con el fin de que se tenga una mejor comprensión del proyecto, explicaremos los beneficios que trae.
El diseño de una prótesis de dedo representa un avance en la mejora de la calidad de vida para personas que han sufrido amputaciones de este tipo, en este sentido el presente proyecto ofrece una serie de ventajas a nivel funcional, psicológico e incluso social, pues representa una solución innovadora y económica.
Recuperar la funcionalidad manual: Con ayuda de la prótesis se podrá recuperar ciertas habilidades motoras esenciales, facilitando el acceso de a una vida con un poco más normalidad y practicidad que genera más autonomía.
Accesibilidad y costes reducidos: La utilización de tecnologías como la impresión 3D y materiales de última generación permiten poder desarrollar una prótesis por un coste asequible y fácil fabricación por lo que tenemos claro que se llega a poder desarrollar a un buen costo y con un amplio alcance para los destinatarios que la necesiten.
Ergonomía y adaptación personalizada: La prótesis, además de adaptarse a las características personales del usuario, permitirá ofrecer confort, ligereza y adaptación perfecta con la anatomía de la mano, favoreciendo un uso de la misma durante un periodo largo mínimo de molestias.
Impacto Psicológico Positivo: Es realmente significativo, al mejorar la apariencia y la funcionalidad de la mano, el proyecto ayuda a aumentar la autoestima y la confianza del consumidor, lo que les permite reintegrarse en la sociedad y en el trabajo sin sentir que están limitados.
Innovación Tecnológica y Desarrollo Sostenible: El nuevo uso de materiales de alta calidad y bastante resistentes, con técnicas avanzadas de fabricación, no solo impulsa el desarrollo tecnológico en la prótesis, sino que también incita el empleo adecuado de recursos, reduciendo el impacto ambiental.
Ficha técnica sensores utilizados:
Para el proyecto se utilizó 2 tipos de sensores, el sensor de distancia ultrasónico HC-SR04 y un servomotor modelo SG90, claramente también se utilizó el Arduino UNO como placa controladora y de interacción entre sensores yactuadores, y el protoboard para mejor organización del prototipo.
El sensor ultrasónico se caracteriza por medir distancias a través de ondas ultrasónicas, mide a partir de 2 cm a 400 cm con una precisión de 3 mm. El funcionamiento de este sensor radica desde la emisión de un pulso ultrasónico desde el transmisor (Trig) que viaja a través del aire hasta que encuentre un objeto, si lo encuentra, rebota y regresará al receptor (Echo), para su debido funcionamiento es de vital importancia evitar interferencias de otros sensores ultrasónicos y debe estar en una superficie plana. El sensor cuenta con un pin VCC que es la parte positiva del dispositivo, por lo que debe ir conectada a 5V en el Arduino Trig, quien emite las ondas ultrasónicas y va conectada al Arduino Echo, quien recibe la señal y envía otra que refiere al tiempo de regreso y va conectada al Arduino por último, GND que es el pin que une el dispositivo con la tierra, es decir, la parte negativa.
El servomotor que se caracteriza por permitir una rotación de posición con un rango de 0 a 180 grados, el voltaje debe ser entre 4.8 y 6 V para que el servomotor funcione, tiene un circuito de control que recibe la señal del Arduino y que posteriormente determinará la posición del motor. La señal es llamada PWM y es una onda con un ancho variable, según su ancho se determinará el ángulo de rotación del servomotor. Los servomotores tienen 3 cables, uno para la carga positiva, el de color rojo, otro para la carga negativa (tierra), el de color café, y otro que sirve para las señales, el de color naranja.
Estos sensores fueron escogidos debido a que nuestro proyecto necesita movilidad y sistema de seguridad que son permitidos a través del servomotor y el sensor ultrasónico respectivamente. Así, el servomotor permitirá el movimiento del dedo solo si el sensor ultrasónico detecta un objeto a cierta distancia, el movimiento que realizará será “guardar” el dedo para evitar que se “choque” o golpee con algo.
Diagrama de las conexiones del circuito:
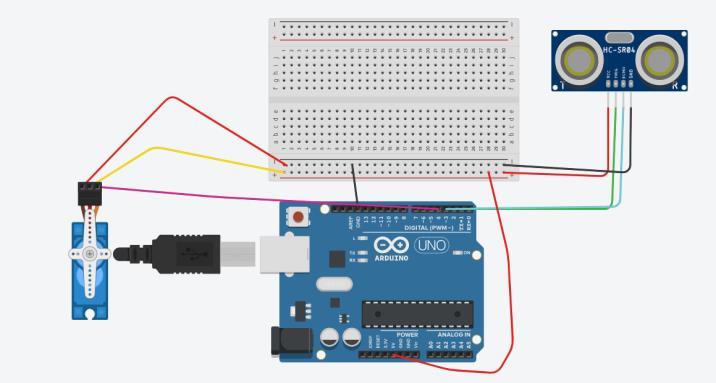

Circuito funcional:
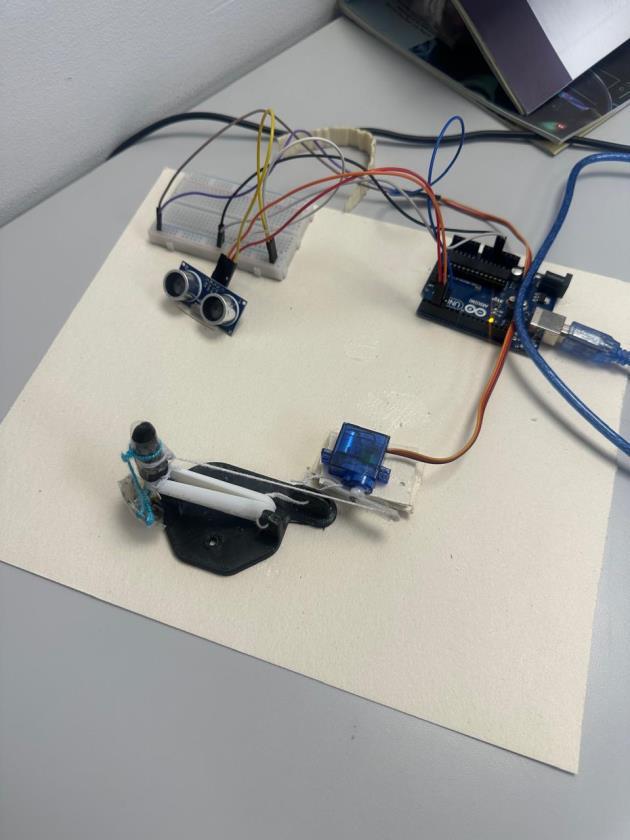
Código utilizado:

// Prototipo dedo que se mueve con un servomotor y con un sensor ultrasónico
#include<Servo.h> // se incluye una librería de control para los servomotores Servo dedo; //nombrar objeto de servomotor int trig=2; //Envía sonido, pin para (Trig)
int echo=3; //Recibe el sonido pin para (Echo) int tiempo; // tiempo de impulso del ultrasónico int distancia; //distancia calculada (variable)
void setup() // iniciar programa, configurar funcionamiento.
{ pinMode(trig,OUTPUT); //salida de Trig
pinMode(echo,INPUT); //entrada de Echo dedo.attach(4); // pin digital 4
pinMode(trig,OUTPUT); pinMode(echo,INPUT); dedo.attach(4);
}
void loop() //ejecutar bucles continuos cuando Arduino esté encendido.
{
digitalWrite(trig,HIGH); //enviar pulso alto (trig) delay(1); //esperar un microsegundo
digitalWrite(trig,LOW); // enviar pulso bajo (trig) tiempo=pulseIn(echo,HIGH); //medir tiempo de pulso distancia=tiempo/58.2; //calcular distancia en cm delay(500); //esperar 500 milisegundos
if(distancia<=50) //si la distancia es menor o igual a 50cm
{ dedo.write(180); //mover el servomotor a 180 grados
}
if(distancia>50) // si es menor a 50 cm
{ dedo.write(0); //mover el servomotor a 0 grados }
Cálculo de impresión 3D:
Para el proyecto, utilizamos el programa thingiverse para buscar el modelo, diseñando las piezas en modelado 3D. De todas las piezas solo utilizamos el modelo para un dedo: https://www.thingiverse.com/thing:3875608
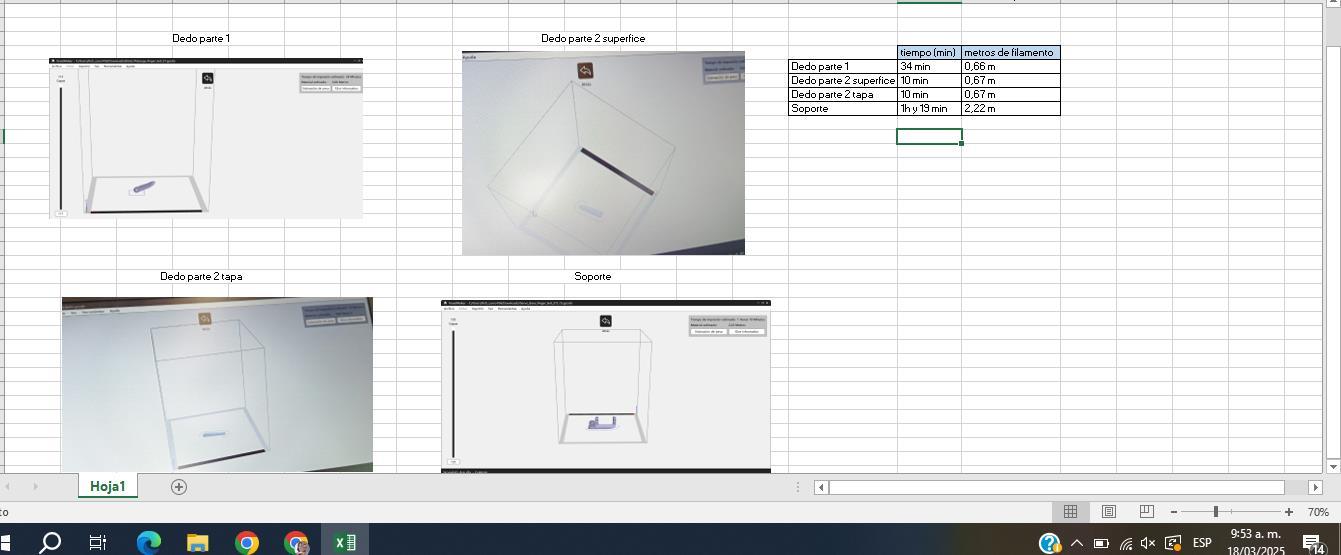
Cálculos en Excel:

Conclusiones
Para la planeación del proyecto, se consideró realizar la prótesis de una mano completa, pero lastimosamente tuvimos que desistir de dicha idea, ya que no contábamos ni con el tiempo suficiente ni con la certeza de que iba a salir correctamente, pues es considerado un proyecto un poco más ambicioso debido a su alto nivel de complejidad, así que tuvimos que optar por la realización de un solo dedo manteniendo la esencia de la idea inicial, pero con una mejor facilidad
Sin embargo, nuestro proyecto no estuvo exento de los errores en el proceso, ya que tuvimos que atravesar varios obstáculos, principalmente en la impresión 3D, puesto que, durante varios intentos, la impresión salía bien sea rota o deformada, impidiendo el avance de nuestro proyecto.
Imágenes que ilustran las veces que nos salió mal la impresión:


Por otro lado, a la hora de ensamblar, notamos que el funcionamiento del dedo no era acorde a lo que teníamos pensado, pues cuando el servomotor se movía el dedo si se recogía pero no volvía a su puesto original, por lo que decidimos realizar la integración de una moneda con la finalidad de que hiciera cierto peso al dedo para que gracias al movimiento del servomotor ese volviera a su posición original y el funcionamiento sea el correcto. Este aspecto no lo teníamos previsto, por lo cual fue una modificación de último momento en busca de que el trabajo fuera el mejor.
Por último, consideramos que para una próxima ocasión teniendo una experiencia vivida, sepamos nuevas formas de programar, diseñar e imprimir, tratando de evitar que surjan errores que afecten el proceso y buscando optimizar mejor el tiempo haciendo que sea más fácil la realización de proyectos de este tipo, esperando que en un futuro podamos realizar cambios y mejoras al proyecto en pro de innovar, de hacerlo más dinámico, más eficaz y poco a poco hacerlo evolucionar con respecto a las necesidades que vayan surgiendo.
Proyecto 5
Prótesis para personas ciegas
Introducción
Nuestro proyecto consiste en una prótesis para las personas ciegas, ayudándoles por medio de sensores (ultrasónico y buzzer) para que no impacten contra los diferentes objetos de la vida cotidiana, por ejemplo, estructuras, pilares, paredes, entre muchas otras. Este proyecto tiene una importante función, ya que ayudamos a las personas con discapacidad visual con el uso de los medios tecnológicos de los cuales disponemos hoy día para mejorar exponencialmente la calidad de vida de estos individuos.
Desarrollo
Análisis
Según la INC ( Instituto Nacional para Ciegos), hay alrededor de 2 millones de personas ciegas, siendo un 4% de la población Colombiana que se ve afectada por esta problemática, La ceguera o incidencia, es una discapacidad sensorial que consiste en la pérdida total o parcial del sentido de la vista. Existen varios tipos de ceguera parcial dependiendo del grado y tipo de pérdida de visión, como la visión reducida, el escotoma, la ceguera parcial (de un ojo) o el daltonismo.
Investigación preliminar
Según estudios, lo que más le genera problemática a los ciegos es moverse por lugares desconocidos, identificar obstáculos ysubirse o utilizar transporte público. Con estas prótesis, se eliminarán muchos de estos inconvenientes presentes.
Diseño del Prototipo
Aquí presente adjunto el prototipo generado por la IA :

Ficha técnica


esquemático

Circuito funcional y código utilizado
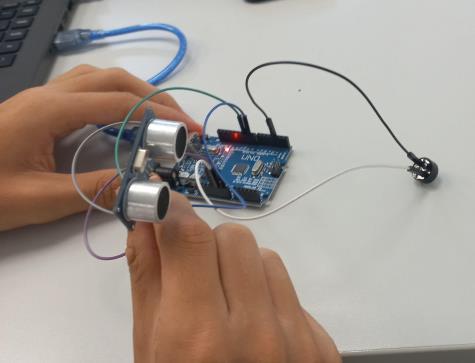
// Definición de pines para el sensor ultrasónico y buzzer
#define TRIG 9
#define ECHO 10
#define BUZZER 3
void setup() {
pinMode(TRIG, OUTPUT);
pinMode(ECHO, INPUT);
pinMode(BUZZER, OUTPUT);
Serial.begin(9600); }
void loop() { long duration; int distance;
// Enviar pulso ultrasónico
digitalWrite(TRIG, LOW); delayMicroseconds(2);
digitalWrite(TRIG, HIGH); delayMicroseconds(10);
digitalWrite(TRIG, LOW);
// Recibir eco y calcular distancia duration = pulseIn(ECHO, HIGH); distance = duration * 0.034 / 2; // Conversión a cm
Serial.print("Distancia: ");
Serial.print(distance);
Serial.println(" cm");
// Si la distancia es menor a 10 cm, activar el buzzer if (distance > 0 && distance < 30) { digitalWrite(BUZZER, HIGH);
} else { digitalWrite(BUZZER, LOW);
} delay(500); }
Ensamblaje y Pruebas :
En este campo tuvimos que realizar diversos ajustes sobre todo en el diseño de las gafas, en muchísimas ocasiones, tuvimos dificultad al momento de modelar, ya sea porque nos quedaba muy grande o demasiado pequeño, logramos conseguir el tamaño deseado después de varios intentos. En la parte funcional no presentamos mayores inconvenientes, cambiamos los cables en caso de que el circuito fallara y se repetía el proceso.
Presentación Final :
Este proyecto supone tener un impacto completamente benéfico para todo el mundo, sobre todo para las personas que padecen esta discapacidad y realizaremos un aporte al mundo tecnológico. Se busca facilitarles la compleja vida a las personas sin visión para que puedan tener una mejor calidad del diario vivir , y nuestro trabajo, en esencia, es un compromiso con la igualdad de oportunidades y la construcción de un futuro más inclusivo.
Cálculo de Impresión 3D :
- Aquí adjuntamos la tabla de excel con los datos más relevantes acerca de la producción del proyecto.

Conclusiones:
El prototipo que mis compañeros y yo desarrollamos es completamente funcional, la idea evidentemente a futuro, es lograr incorporar todos los elementos utilizados ( arduino, buzzer, cables, pilas y demás elementos ) en una sola pieza, es decir, que
sean muchísimo más cómodas y más prácticas para el uso diario. También se espera que con esta mejora se vean de una forma más estética y menos vistosa, se esperaría colocarle a las gafas un estilo oscuro, es decir, semejante al diseño de las gafas de sol ( lentes, montura y varillas en tonalidades o colores poco llamativos) con la intención de darle un diseño elegante y serio a este producto.
Proyecto 6
Sistema de orientación para personas con discapacidad visual
Nuestro proyecto tiene como objetivo ayudar a las personas que padezcan problemas visuales para que a través de un dispositivo (parecido a una canillera) se puedan orientar en los espacios y se muevan con mayor facilidad, la realización de este dispositivo sería muy útil teniendo en cuenta que les permitiría a las personas tener mayor movilidad sin hacer uso de herramientas un poco estorbas.
Este dispositivo se realizará con un modelado e impresión 3D, que será la base donde se ubican los circuitos para poner en funcionamiento un sensor ultrasónico que detecta los obstáculos al frente de la persona y hace un sonido por medio de un buzzer, para que así el individuo cambie de dirección.
3.1 Análisis de la problemática:

La problemática a solucionar tiene que ver con las personas con discapacidad visual ya que identificamos que si bien hoy en día existen herramientas que les permiten desplazarse y tener cierta autonomía, la realidad es que son un poco disfuncionales, y las que tienen buenos avances tecnológicos son poco asequibles para la población; es por esto, que llevar a cabo nuestro prototipo es importante debido a que ayuda al funcionamiento independiente y facilitado de las personas ciegas, haciendo uso de la tecnología sin que el prototipo tenga costos demasiados elevados.
Fases:
Investigación Preliminar: El número de personas que sufren de una discapacidad visual es bastante considerable, al menos en Colombia, en el año 2022 habían aproximadamente dos millones de ciudadanos con esta condición. Además de esto, tuvimos en cuenta algunas necesidades de esta población, como lo son: la necesidad de aprender técnicas para orientarse y desplazarse en el espacio, adquirir
hábitos de autonomía personal, y la necesidad de relacionarse con el mundo físico y social a través de otros sentidos distintos a la visión.
Diseño del Prototipo: Con ayuda de la IA ChatGPT, ilustramos nuestra idea del prototipo completo: base en 3D, circuito, ubicación, etc. Y después usamos la herramienta Meshy AI para crear la canillera o base.

Fabricación con Impresión 3D: Para diseñar y realizar nuestro prototipo hicimos uso de diferentes herramientas como Meshy AI, para el diseño o molde, después se utilizó TinkerCad para poner las canilleras en formato STL y así poder mandarlo a Voxel Maker Para imprimirlo en la herramienta 3D.

Programación y Control: El código se llevó a cabo en Arduino para la interacción del dispositivo.
// Definimos los pines const int trigPin = 9; const int echoPin = 10; const int buzzerPin = 11;
void setup() {
// Configuramos los pines
pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); pinMode(buzzerPin, OUTPUT);
// Iniciamos la comunicación serial Serial.begin(9600); }
void loop() {
// Enviar pulso al Trigger digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW);
// Leer el tiempo de respuesta del Echo long duration = pulseIn(echoPin, HIGH);
// Calcular la distancia long distance = duration * 0.034 / 2; // La velocidad del sonido es 0.034 cm/microsegundo
// Mostrar la distancia en el monitor serial Serial.print("Distancia: "); Serial.print(distance); Serial.println(" cm");
// Si la distancia es menor que 20 cm, activamos el buzzer if (distance > 20) { digitalWrite(buzzerPin, LOW); // Encender el buzzer } else { digitalWrite(buzzerPin, HIGH); // Apagar el buzzer }
// Pausa de 100 ms delay(100); }
Ensamblaje y pruebas:


3.2 Ficha técnica de los Sensores
Utilizados: Sensor ultrasónico HCSR04

Características:
Frecuencia de operación
● Generalmente entre 40 kHz y 400 kHz, dependiendo del modelo y aplicación.
Principio de funcionamiento
● Emite un pulso ultrasónico y mide el tiempo que tarda en reflejarse en un objeto y regresar al sensor (principio de eco o sonar).
Rango de medición
● Puede variardesdeunos pocos centímetroshasta varios metros (típicamente de 2 cm a 5 m en modelos comunes).
Precisión
● Depende del modelo, pero puede ser de milímetros en sensores de alta precisión.
Ángulo de detección
● Entre 15° y 30°, dependiendo del diseño del transductor.
Velocidad de respuesta
● Rápida, pero limitada por la velocidad del sonido (~343 m/s en aire a temperatura ambiente).
Tolerancia a condiciones ambientales
● Puede verse afectado por temperatura, humedad ypresión atmosférica, aunque algunos modelos incluyen compensación térmica.
Interfaz de salida
● Señal analógica, digital (PWM o UART) o protocolos industriales (I2C, SPI, RS485).
Consumo de energía
● Generalmente bajo, alrededor de 10 a 50 mA en modelos comunes.
Aplicaciones
● Robótica: Detección de obstáculos y navegación autónoma.
● Automotriz: Sensores de estacionamiento.
● Industrial: Control de nivel de líquidos y detección de objetos en cintas transportadoras.
● Médica: Ecografía.
3.4 y3.5 Diagrama esquemático ycircuito funcional: Para realizar nuestro circuito usamos 4 cables macho-hembra, 4 cables macho-macho, un buzzer, un sensor ultrasónico, una tarjeta arduino y una placa de pruebas. Este circuito funciona gracias al código previamente realizado en Arduino.
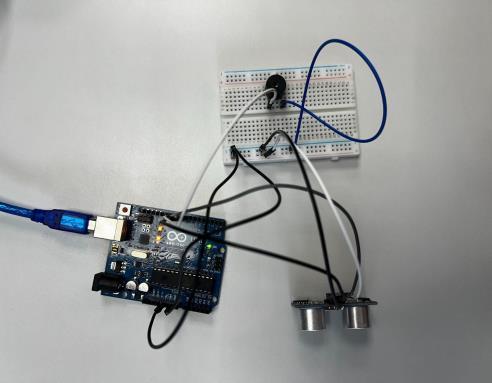
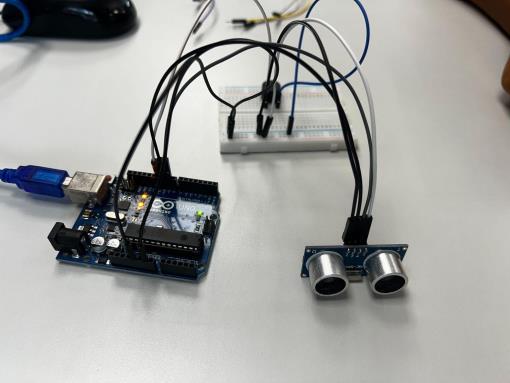
3.6 Cálculo de impresión 3D:
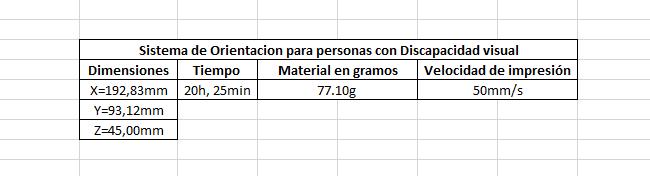
Correcciones de la tabla : Dimensiones en X = 140,00mm, Tiempo: 2h, 28min.
3.7 Resultados y conclusión:
Posibles mejoras: el prototipo funciona de manera adecuada, sin embargo, se le pueden corregir ciertos factores como son el tamaño de la canillera para que así haya un mayor espacio para instalar el programa y le sea más cómodo a la persona que haga uso de el mismo, al igual que mejoras en el diseño para hacerlo asi mas practico.
Proyecto 7
Dispensador de comida para mascotas
Introducción
Este proyecto se trata de un dispensador de comida para perritos y gatitos ciegos donde este dispensador tiene un horario donde hace un sonido para que el gato o el perro escuche y está programado para que en ciertas horas la comida salga y los animalitos sepan para ir a comer y está diseñado para que cuando los dueños tengan que salir no se preocupe mucho por la alimentación del perro o también serviría cuando el dueño está muy ocupado y no le puede dar la comida al perro o gato, el dispensador lo podrá hacer automáticamente haciendo que la alimentación del animal no se vea perjudicada.
Análisis de la Problemática
Este proyecto lo hicimos con base a la problemática en la que los perritos ciegos no pueden encontrar su tarro de comida, con ayuda de un buzzer, el cual suena al momento en el que sale la comida los perritos podrán localizar con mayor facilidad su comida. Este proyecto beneficia tanto a los perritos o gatitos ciegos, como también a las personas que están ocupadas o no están en casa a la hora de la comida del animalito, generando que el perrito no coma; este proyecto evita lo anterior.
Fases del proyecto
Explicación de cada una de las fases:
Investigación Preliminar: Primero tuvimos varias opciones de proyectos principalmente para los perros ya que nosotras pensamos que los animales son más vulnerables ya que ellos no pueden hablar o expresar algo como el dolor o disgusto fácilmente como los humanos y más si tienen una discapacidad , una de nuestras opciones era un collar que detecta objetos para los perros ciegos entre otras
opciones similares pero al final escogimos un dispensador de comida para perros o gatos ciegos, el cual beneficiará tanto a los animalitos como a los humanos
Diseño del Prototipo: Nosotros no utilizamos ninguna IA, si no que con la ayuda de tinkercad hicimos nuestro diseño ya que queríamos tener un diseño más propio.
Programación y Control: // C++ code
//
#include <Servo.h> // Incluir la librería Servo
// Definir los pines del buzzer y servomotor
const int buzzerPin = 5; const int servoPin = 4;
// Frecuencia para el sonido agudo (en Hz)
const int frecuenciaAguda = 2000; // 2000 Hz es un tono más agudo
// Crear un objeto servo
Servo miServo;
void setup() {
// Configurar el servomotor en el pin especificado miServo.attach(servoPin);
// Inicialmente, colocar el servomotor en la posición 0 grados miServo.write(0); } void loop() {
// Encender el buzzer durante 5 segundos a un tono agudo
tone(buzzerPin, frecuenciaAguda); // Genera un tono de 2000 Hz delay(5000); // Mantener el sonido por 5 segundos
// Apagar el buzzer noTone(buzzerPin); // Detener el tono
// Mover el servomotor a +90 grados
miServo.write(90);
delay(10000); // Esperar 10 segundos
// Mover el servomotor a -90 grados
miServo.write(-90);
delay(10000); // Esperar otros 10 segundos
// Esperar 35 segundos para completar el ciclo de 40 segundos
delay(35000); // 35 segundos de espera
Fabricación con Impresión 3D: Nosotros no utilizamos ninguna IA si no el tinkercad ya que quisimos tener un diseño propio.
Ensamblaje y Pruebas: Ajustes y mejoras con base en pruebas funcionales. Por medio de pruebas de los circuitos en tinkercad pudimos perfeccionar la conexión de los elementos y la programación utilizada en este proyecto.
Presentación Final: Este proyecto será muy bueno para todos los perros y gatos ciegos para que cuando, ya que, cuando estén solos o los dueños no puedan estar muy pendientes de ellos, los animales no salgan perjudicados y dejen de comer. Este dispositivo cada cierto tiempo le sirve al perrito de comer y luego suena un pitido para que el animalito se guíe con mayor facilidad a su plato de comida.
Ficha técnica de los Sensores Utilizados
- Arduino alimenta los otros componentes (buzzer, servomotor, etc.).
- El buzzer se conecta a un pin digital de Arduino.
- El servomotor se conecta a un pin PWM de Arduino para el control preciso.
- La protoboard permite realizar todas las conexiones de manera ordenada y segura.
- La pila de 9V proporciona energía externa a Arduino (si no se usa alimentación USB).
Diagrama esquemático

Circuito funcional
Fotografías del circuito ensamblado y funcionando
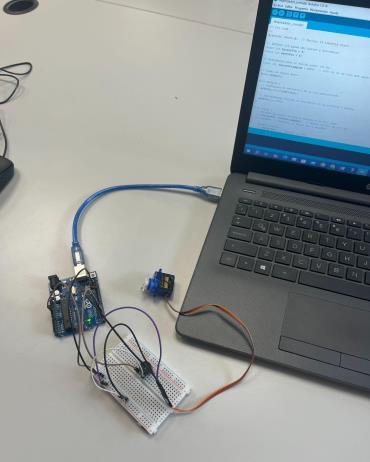
Código utilizado
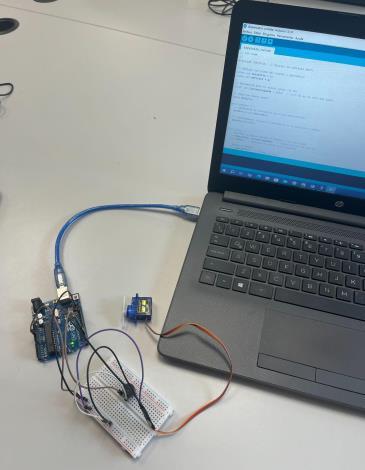
Código fuente del programa en Arduino. Explicación detallada de cada parte del código, indicando su funcionalidad dentro del prototipo.
1. Incluir la librería Servo
#include <Servo.h> // Incluir la librería Servo
Funcionalidad: Esta línea incluye la librería Servo.h, que proporciona las funciones necesarias para controlar un servomotor. Al incluir esta librería, podemos usar funciones como attach() y write() para mover el servomotor.
2. Definición de los pines const int buzzerPin = 5; const int servoPin = 4;
Funcionalidad: Aquí se definen dos constantes que indican los números de los pines en los que están conectados el buzzer (zumbador) y el servomotor. buzzerPin: El buzzer está conectado al pin digital 5 de la placa. servoPin: El servomotor está conectado al pin digital 4 de la placa.
3. Definición de la frecuencia para el buzzer const int frecuenciaAguda = 2000; // 2000 Hz es un tono más agudo
Funcionalidad: Define la frecuencia de un tono agudo que se generará con el buzzer. En este caso, 2000 Hz. Los valores más altos de frecuencia corresponden a tonos más agudos.
4. Creación de un objeto Servo Servo miServo;
Funcionalidad: Crea un objeto llamado miServo que representa el servomotor. Este objeto se utilizará para controlar el servomotor, como moverlo a distintas posiciones (por ejemplo, 0 grados, 90 grados, etc.).
5. Función setup() void setup() {
− // Configurar el servomotor en el pin especificado miServo.attach(servoPin);
// Inicialmente, colocar el servomotor en la posición 0 grados miServo.write(0); }
Funcionalidad: La función setup() se ejecuta una sola vez cuando se inicia el programa y es utilizada para configurar los componentes.
miServo.attach(servoPin): Asocia el servomotor con el pin digital 4 (especificado por servoPin). Esto es necesario para que el código pueda controlar el servomotor en el pin correcto.
miServo.write(0): Coloca el servomotor en la posición de 0 grados. Esto es el estado inicial del servomotor.
6. Función loop()
void loop() {
// Encender el buzzer durante 5 segundos a un tono agudo tone(buzzerPin, frecuenciaAguda); // Genera un tono de 2000 Hz delay(5000); // Mantener el sonido por 5 segundos
− // Apagar el buzzer noTone(buzzerPin); // Detener el tono
− // Mover el servomotor a +90 grados
− miServo.write(90); delay(10000); // Esperar 10 segundos
− // Mover el servomotor a -90 grados miServo.write(-90); delay(10000); // Esperar otros 10 segundos
// Esperar 35 segundos para completar el ciclo de 40 segundos delay(35000); // 35 segundos de espera }
Funcionalidad: La función loop() se ejecuta repetidamente después de setup() y realiza las acciones que se deben ejecutar de manera continua. Este bloque controla tanto el buzzer como el servomotor.
tone(buzzerPin, frecuenciaAguda): Inicia la emisión de un tono en el buzzer con la frecuencia especificada (2000 Hz). El buzzer comienza a sonar.
delay(5000): Pausa el programa durante 5 segundos, manteniendo el tono en el buzzer durante ese tiempo.
noTone(buzzerPin): Detiene la emisión del tono del buzzer.
miServo.write(90): Mueve el servomotor a una posición de +90 grados.
delay(10000): Pausa el programa durante 10 segundos, manteniendo el servomotor en esa posición.
miServo.write(-90): Mueve el servomotor a una posición de -90 grados.
delay(10000): Pausa el programa durante 10 segundos más, manteniendo el servomotor en esa posición.
delay(35000): Pausa el programa durante 35 segundos para completar un ciclo de 40 segundos.
Resumen de la secuencia del ciclo en loop():
- El buzzer suena durante 5 segundos.
- El servomotor se mueve a +90 grados y se mantiene allí por 10 segundos.
- El servomotor se mueve a -90 grados y se mantiene allí por 10 segundos.
- Se espera durante 35 segundos para completar el ciclo de 40 segundos.
- Cada vez que termine el ciclo de 40 segundos, el programa repetirá este proceso de manera continua.
Resumen general del código:
Este código controla un buzzer y un servomotor en un ciclo repetitivo. Primero el buzzer emite un tono agudo por 5 segundos al inicio de cada ciclo. Luego, el servomotor se mueve a dos posiciones (90 grados y -90 grados), manteniéndose en cada una por 10 segundos. Al final de cada ciclo, hay una espera de 35 segundos antes de repetir el proceso
Calculo de impresión 3D
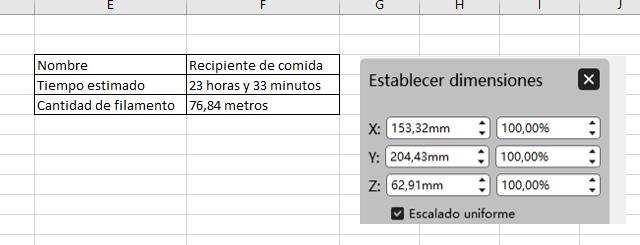
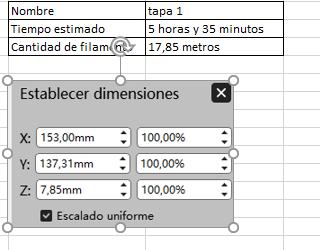


Recipiente

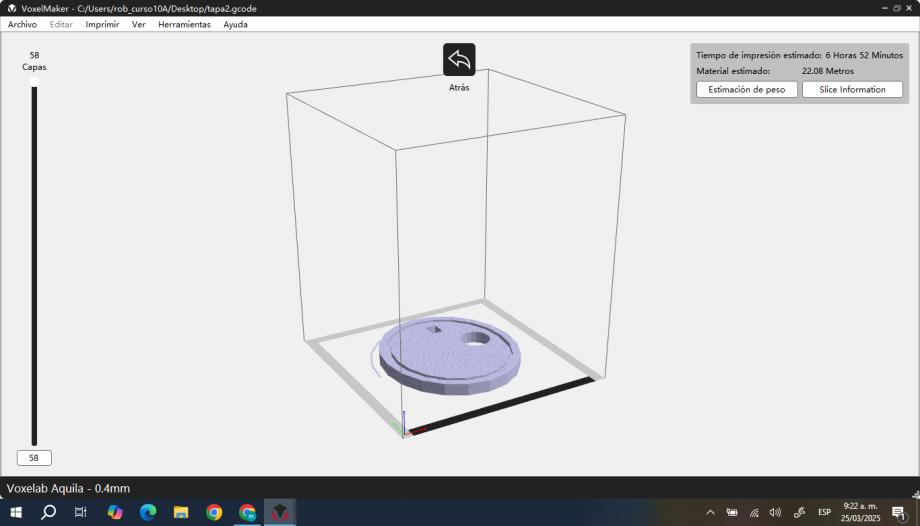
Evaluación del funcionamiento del prototipo. Posibles mejoras y aplicaciones futuras.
Finalmente, ya tenemos el proyecto el cual facilitará la vida de varias personas y mejorará la constancia de alimento de las mascotas. Algunas de las mejoras en el proyecto podrán ser organizar de mejor forma el servomotor para que al momento de dejar y parar de pasar comida esté más actualizada y sea más eficiente.
Proyecto 8
Proyecto se centra en Turbo, un perrito Chihuahua que nació sin sus patitas delanteras
Introducción
Turbo es un cachorro Chihuahua que nació sin sus patas delanteras por una rara condición, esto le impide poder moverse como lo haría un perrito con sus extremidades completas, gracias a esto a Turbo se le dificulta hacer actividades básicas que él necesita. Pese al mal pronóstico y la preocupación de sus dueños, ellos han hecho todo lo posible por lograr una integración y mejor movilidad del can.
El objetivo principal de este proyecto es encontrar una nueva forma de vida para Turbo y no solo para él sino para todos los perros que por alguna situación no cuentan con todas sus extremidades. Con materiales reciclados y con la ayuda de arduino, pensamos en crear una carretilla (con materiales reciclados que puedes encontrar fácilmente) que le pueda aportar movilidad y con la ayuda del sensor ultrasónico y el servomotor hacer que esta sea más útil.
Análisis de la Problemática
Descripción de la problemática:
Como he comentado anteriormente, este proyecto se centra en Turbo, un perrito Chihuahua que nació sin sus patitas delanteras debido a una condición rara. Esto hace que no pueda moverse como otros perritos y le cuesta hacer cosas básicas en su día a día. Sus dueños han intentado ayudarlo de diferentes maneras para que tenga una mejor calidad de vida.
Justificación de la necesidad del prototipo:
Para que Turbo pueda moverse con más facilidad, se diseñó un pequeño carrito usando piezas de juguetes reciclados, sujetándolo con un arnés. Como Turbo todavía está creciendo, esta solución le servirá por ahora, y en el futuro se puede adaptar según su tamaño. El uso de la impresión 3D para crear prótesis en animales es una opción novedosa, económica y accesible. Gracias a esta tecnología, se pueden hacer dispositivos personalizados para cada animal, ayudándolos a tener una vida más cómoda y feliz.
Fases de proyecto
Investigación Preliminar:
Nosotras nos basamos en el caso real de Turbo-Run, como ya he mencionado anteriormente, es el caso de un perrito chihuahua que nació con una malformación física, Turbo-Run tenía solo 4 semanas cuando lo llevaron a una clínica veterinaria en Indianápolis, Indiana. El criador expresó su preocupación porque Turbo-Run nació sin sus dos patas delanteras, el criador sabía que necesitaría más atención individual y decidió entregarlo, ahora fue adoptado por sus padres adoptivos y podrá adaptarse a una silla de ruedas adecuada a su tamaño y necesidades.

- Diseño del Prototipo:
Inicialmente, la compañera Valentina Cuervo había diseñado un modelado en meshy y otro en tinkercad para el proyecto anterior, sin embargo, se le hicieron algunas mejoras al diseño. La idea era recrear el diseño netamente de la prótesis en meshy, pero en el proceso nos dimos cuenta que era necesario incluir al perro debido a que la prótesis no se podía sostener por su cuenta, ya que el perro solo carece de las patas delanteras, por lo que utiliza las patas traseras para movilizarse. A continuación se incluyen las fotos del proceso.
Diseño original:

Diseño prótesis:

Diseño actual:

- Programación y Control:
Haciendo uso de elementos como el servomotor y el sensor ultrasónico, desarrollamos un código en Tinkercad para poder hacer posible la interacción entre estos dos a ciertos estímulos o movimientos específicos. Con esto pudimos realizar una de las partes más importantes de nuestro proyecto y logramos cumplir con nuestro objetivo sobre las funciones principales de esta prótesis haciendo uso de Arduino y sus componentes.
- Fabricación con Impresión 3D:
Cuando estábamos iniciando el proceso de fabricar nuestro modelo para imprimirlo en 3D, tuvimos algunas complicaciones con el diseño debido a que era necesario separar las piezas y el prototipo que nos ofrecía Meshy no nos permitía realizar ese procedimiento de forma adecuada, por lo que fue necesario buscar otras alternativas en Thingiverse que se ajustaran a los requisitos de la aplicación VoxelMaker. Teniendo en cuenta lo anterior, utilizamos un modelo para un perro sin las patas traseras que pudiera desarmarse para así imprimirlo correctamente y lo modificamos para que se adaptara a las necesidades de Turbo Run, sin embargo, el perro chihuahua tuvo que ser reemplazado por un perro salchicha. A continuación se muestra el nuevo modelo que se utilizará en la impresión 3D.

- Ensamblaje y Pruebas:
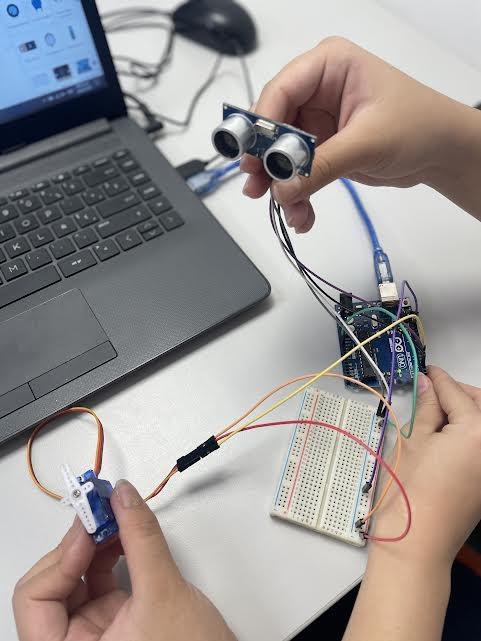
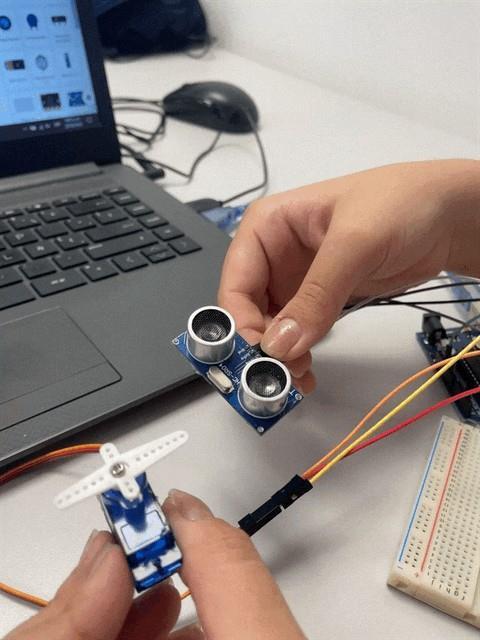
- Presentación Final:
Consideramos que la prótesis ha tenido un impacto positivo en la calidad de vida de Turbo, permitiéndole mayor movilidad e interacción con su entorno. Desde el punto de vista económico, el uso de materiales accesibles ha demostrado que si es posible ayudar a los animales con discapacidad sin que sea muy costoso, tecnológicamente, el proyecto resalta la importancia del diseño 3D. Hablando de los beneficios del proyecto este no solo representa una solución accesible para otros animales con necesidades similares a las de Turbo, sino que también mejora significativamente el bienestar de Turbo al permitirle moverse de manera independiente y aumentando su calidad de vida
Ficha técnica de los Sensores Utilizados:
Modelo del servomotor: Servomotor SG90 Tower Pro
Voltaje: 4.8 Voltios
Características: Servo miniatura de gran calidad y dimensiones pequeñas, además bastante económico. Funciona con la mayoría de tarjetas electrónicas de control con microcontroladores y además con la mayoría de los sistema
Conexión: Cuenta con un conector universal tipo “S” que encaja perfectamente en la mayoría de los receptores de radio control , los cables en el conector están distribuidos de la siguiente forma: Rojo =Alimentación (+), Café = Alimentación (–) o tierra, Naranja= Señal PWM.
Modelo sensor ultrasónico: Sensor De Ultrasonido Hc-sr04 Arduino
Voltaje: 5 Voltios
Características: Es un sensor de distancia de bajo costo que utiliza ultrasonido para determinar la distancia de un objeto en un rango de 2 a 450 cm.
Conexión: VCC (+5V DC)
TRIG (Disparo del ultrasonido)
ECHO (Recepción del ultrasonido)
GND (Tierra: 0V)
Diagrama esquemático:
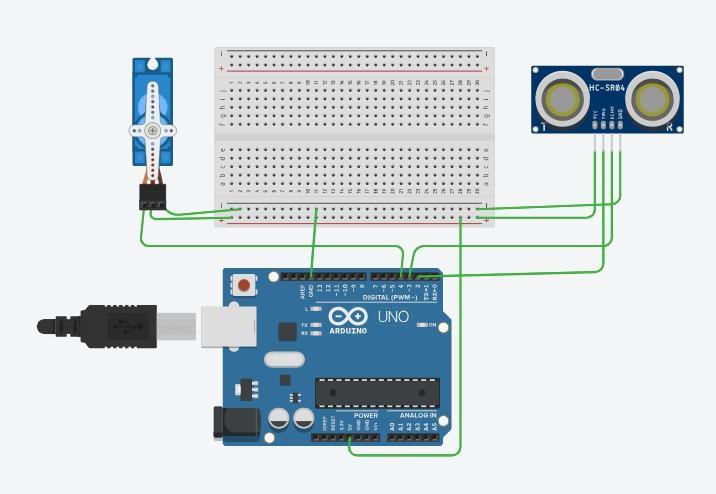
Circuito funcional:

Código utilizado:
#include<Servo.h> Servo puerta; int trig=2; int echo=3; int tiempo; int distancia; void setup()
{ pinMode(trig,OUTPUT); pinMode(echo,INPUT); puerta.attach(4); } void loop()
{
digitalWrite(trig,HIGH); delay(1); digitalWrite(trig,LOW); tiempo=pulseIn(echo,HIGH); distancia=tiempo/58.2; delay(100); if(distancia<=50) { puerta.write(90); } if(distancia>50) { puerta.write(0); } }
Explicación código:
- Sensor ultrasónico
○ int trig = 2; → Pin 2 (Salida - OUTPUT)
■ Se usa para enviar un pulso ultrasónico al sensor
○ int echo = 3; → Pin 3 (Entrada - INPUT)
■ Recibe el eco del pulso ultrasónico y mide el tiempo que tarda en regresar.
- Servomotor
○ puerta.attach(4); → Pin 4 (Salida - OUTPUT)
1. (setup())
■ Se usa para controlar y determinar el movimiento del servomotor
○ Se configuran los pines del sensor y se asocia el servomotor al pin 4.
2. (loop())
○ Se genera un pulso en el pin 2 (trig).
○ Se mide el tiempo en el pin 3 (echo) para calcular la distancia.
○ Si la distancia es menor o igual a 50 cm, el servomotor gira 90° (puerta abierta).
○ Si la distancia es mayor a 50 cm, el servomotor gira 0° (puerta cerrada).
Cálculo de impresión 3D:
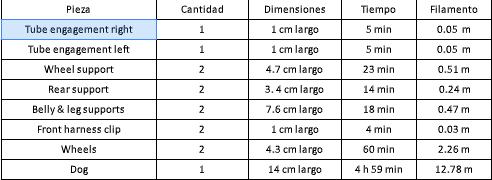



Proyecto 9
Bastón portable para discapacitados
Nuestro proyecto está creado para ayudar a las personas con discapacidad visual, para esto hemos creado un bastón el cuál tiene implementado un sensor ultrasónico y un buzzer que le ayuda a emitir sonido cuando el bastón esté cerca de un objeto lo que ayuda a prevenir algún accidente que le pueda ocurrir a la persona, otro dispositivo que implementamos es un módulo de vibración con la finalidad de que cuando emita un sonido el sensor, también sea emitida una vibración lo cuál nos asegurará que la persona esté consciente de que un objeto está cercano. Lo anterior nos es útil cuando la persona esté en un ambiente ruidoso y podamos procurar que esté seguro y atento de cualquier novedad ya sea el sonido que emita el bastón o la vibración de este mismo.Adicional nuestro proyecto también posee varios leds que implementamos para que las personas que se encuentran a su alrededor puedan observar que la persona tiene discapacidad visual y puedan tener precaución con la persona de discapacidad visual.
Actualmente existen varios tipos de bastones un ejemplo es el bastón xxx el cuál fue creado para la utilidad en nuestra sede de arroyohondo sin embargo a diferencia del de nosotras este está creado con materiales como PVC y otros plásticos y el de nosotros será creado únicamente con impresión 3D, posterior a la impresión y al ensamblado añadiremos los dispositivos necesarios(sensores,cables,leds,placa arduino etc).
Materiales
● Placa de pruebas pequeña (Protoboard): Se utiliza para conectar componentes electrónicos sin necesidad de soldadura, permitiendo realizar pruebas y modificaciones fácilmente.
● Arduino UNO R3: Es una placa de desarrollo basada en el microcontrolador ATmega328P. Se usa para programar y controlar dispositivos electrónicos mediante código.
● Cables: Se emplean para conectar los diferentes componentes en la protoboard y el Arduino, permitiendo la transmisión de señales eléctricas.
● Sensor ultrasónico (HC-SR04, por ejemplo): Mide la distancia a objetos mediante la emisión y recepción de ondas ultrasónicas. Se usa en aplicaciones como detección de obstáculos o medición de distancias.
● Buzzer: Dispositivo que emite sonidos o pitidos cuando recibe una señal eléctrica. Se usa como alerta o indicador en diversos proyectos electrónicos.
● Resistencia: Proteger componentes sensibles (como LEDs) evitando que reciban demasiada corriente,divide voltaje en circuitos eléctricos, controla la corriente en sensores y actuadores,convierte energía eléctrica en calor (como en resistencias calefactoras).
Perfil de Usuario Probable para el Bastón Inteligente
Juan Pérez es un hombre de 35 años con discapacidad visual moderada debido a retinitis pigmentosa, lo que afecta su percepción de profundidad y visión periférica. Mide 1.75 m y vive en una ciudad con calles concurridas, donde camina diariamente varias cuadras para ir a su trabajo en oficina. Para mejorar su movilidad y seguridad, utiliza un bastón inteligente ajustable de 100 a 110 cm, equipado con sensores ultrasónicos que detectan obstáculos a menos de 80 cm, un módulo de vibración para
alertas táctiles, un buzzer para advertencias auditivas y luces LED para visibilidad nocturna. Su diseño ergonómico y ligero le permite desplazarse con mayor autonomía y confianza.
Beneficios para Juan y otros usuarios similares
● Más seguridad al caminar en la calle o en espacios cerrados.
● Mayor autonomía sin depender exclusivamente del tacto o de otras personas.
● Tecnología accesible y de fácil uso, sin necesidad de entrenamiento complejo.
Código
// Definición de pines según tu configuración
const int trigPin = 8; // Pin Trig del sensor ultrasónico
const int echoPin = 9; // Pin Echo del sensor ultrasónico
const int buzzer = 3; // Pin del buzzer
const int led = 7; // Pin del LED
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzer, OUTPUT);
pinMode(led, OUTPUT);
Serial.begin(9600); // Comunicación serial para monitorear distancia }
void loop() {
// Enviar pulso ultrasónico
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Medir el tiempo de respuesta del sensor
long duration = pulseIn(echoPin, HIGH);
// Convertir el tiempo en distancia (cm)
int distance = duration * 0.034 / 2;
Serial.print("Distancia: ");
Serial.print(distance);
Serial.println(" cm");
// Si la distancia es menor o igual a 80 cm, encender buzzer y LED
if (distance <= 80) { digitalWrite(buzzer, HIGH); digitalWrite(led, HIGH);
} else {
digitalWrite(buzzer, LOW);
digitalWrite(led, LOW);
}
delay(500); // Pequeño retardo para evitar mediciones erráticas }


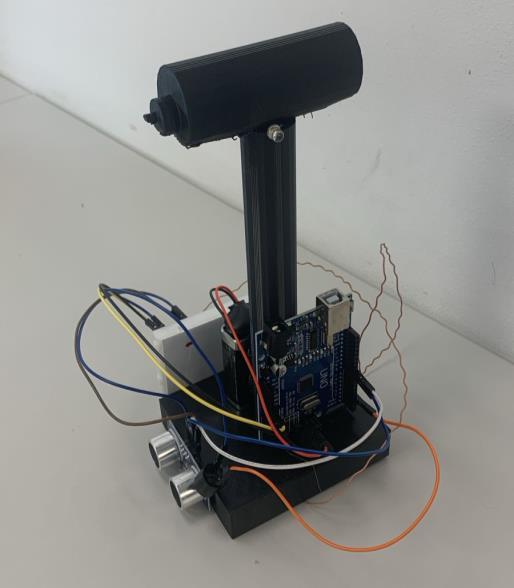

https://www.tinkercad.com/things/2qJJpFdKFew-proyecto-steam-bastoninteligente?sharecode=o3gU0Y1L-n9Gv0OgfaAEfJ-DWOiStAf4IPkuGSA7aGs
Proyecto 10
Discapacidad visual mascotas
Introducción del proyecto
Este proyecto tiene como objetivo fabricar el diseño de una prótesis con tecnología de fabricación aditiva (impresión 3D) que pueda dar solución a una problemática de discapacidad de una persona o animal. El software de diseño y modelado 3D, será Tinkercad.
El impacto que puede generar este tipo de proyectos se da en la cotidianidad de los pacientes, pues estosal recibir el tratamiento van a vivir una mejoría en su locomoción y desarrollo diario, evitando así dolor, sufrimiento o discapacidad de realizar actividades que garantizan su supervivencia y bienestar.