Índice
Que es un Vector………………………………………………………… 1
Elementos Geométrico de un vector…………………………………….. 2-3
Como se Representa en el Plano Cartesiano……………………………. 3-4-5
Como se opera con vectores (Suma, Resta, Multiplicación) ……………5-6-7
Cuales son los tipos de vectores…………………………………………. 7-8-9-10
Cuales son sus aplicaciones en la vida real y la física…………………… 10-11
Aplicación bíblica ………………………………………………………….11
Bibliografía ………………………………………………………………… 12
¿Qué es un vector?
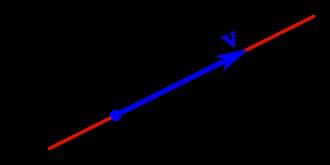
Un vector es un ente matemático utilizado en física y geometría para representar magnitudes que poseen magnitud (longitud), dirección y sentido, como la velocidad, fuerza o desplazamiento. Se representa gráficamente como un segmento de recta dirigido (una flecha) y se caracteriza por tener punto de aplicación, módulo, dirección y sentido.
En física y matemáticas, un vector es un segmento de una línea recta, dotado de un sentido, es decir, orientado dentro de un plano euclidiano bidimensional o tridimensional. O lo que es lo mismo: un vector es un elemento en un espacio vectorial.
2. Elementos geométricos de un vector
Los vectores permiten representar magnitudes físicas dotadas no sólo de intensidad, sino de dirección, como es el caso de la fuerza, la velocidad o el desplazamiento Ese rasgo de contar con dirección es el que distingue a las magnitudes vectoriales de las escalares.
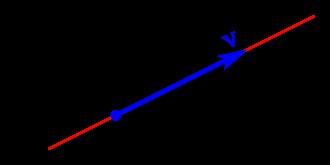
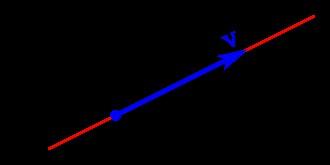
El punto de aplicación es el punto inicial del segmento orientado. El módulo es la longitud del segmento expresado mediante un número no negativo. Cuando el vector representa una magnitud física, dicha cantidad estará expresada en alguna unidad de medida
La recta soporte o línea de acción es la recta contiene al segmento. El conjunto de todas las rectas paralelas a esta se denomina dirección
El sentido, indicado por la orientación (del punto inicial hacia el punto final), siendo uno de los dos posibles sobre la recta soporte. Se representa gráficamente con una flecha.
Además, un vector puede representarse en un plano cartesiano mediante un conjunto de coordenadas (x,y), o en uno tridimensional (x,y,z). Los vectores se representan típicamente mediante una flecha dibujada por encima del símbolo empleado.
Dos vectores fijos se consideran equipolentes si tienen igual módulo, dirección y sentido. La relación entre vectores fijos dada por «ser equipolente» es una relación de equivalencia, y la clase de todos los vectores equipolentes a uno dado se denomina vector (o
vector libre). En cierto modo, un vector se puede desplazar libremente y fijarse a cualquier punto del espacio, pero sin desviarlo, invertirlo o escalarlo.
En física, a veces es preciso considerar el punto de aplicación de la magnitud vectorial considerada, o al menos su recta de acción. En este último caso, la magnitud se describe mediante un vector deslizante: la clase de todos los vectores fijos que comparten igual módulo, recta de aplicación y sentido. En cierto sentido, es como si se pudiera deslizar el vector a lo largo de la recta de acción, pero sin invertirlo o escalarlo.
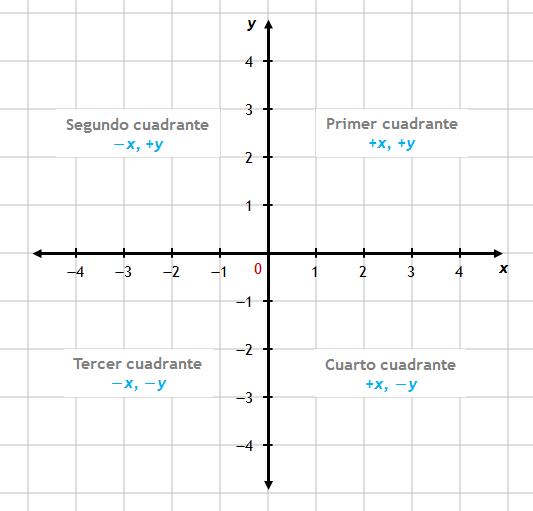
3. Como se representa en el plano cartesiano Representar en el plano cartesiano significa ubicar puntos o gráficos usando un sistema de dos ejes perpendiculares (X horizontal y Y vertical) que se cruzan en un origen (0,0); cada punto se define por un par ordenado (x,y), donde 'x' indica el desplazamiento horizontal y 'y' el vertical desde el origen, permitiendo visualizar ecuaciones, funciones y figuras geométricas.
Elementos clave
Eje X (Abscisas): La línea horizontal; positivos a la derecha, negativos a la izquierda del origen.
Eje Y (Ordenadas): La línea vertical; positivos arriba, negativos abajo del origen.
Origen: El punto donde los ejes se cruzan (0,0).
Cuadrantes: Las cuatro regiones divididas por los ejes (superior derecha (+,+), superior izquierda (-,+), inferior izquierda (-,-), inferior derecha (+,-)).
Par Ordenado (x,y): Define la ubicación de un punto: primero el valor en X, luego el valor en Y.
Cómo representar puntos
1. Localiza el valor de 'x': Busca el primer número del par ordenado en el eje X (horizontal).
2. Desplázate: Muévete hacia la derecha (si 'x' es positivo) o hacia la izquierda (si 'x' es negativo).
3. Localiza el valor de 'y': Desde esa posición, busca el segundo número en el eje Y (vertical).
4. Desplázate: Muévete hacia arriba (si 'y' es positivo) o hacia abajo (si 'y' es negativo) hasta donde se crucen las referencias imaginarias.
5. Marca el punto: Coloca un punto en esa intersección.
Ejemplo
Para el punto (2, 3):
Encuentra el 2 en el eje X (derecha).
Desde ahí, sube 3 unidades en el eje Y para encontrar el punto.
Para representar funciones (gráficas)
Crea una tabla de valores (x, y) usando la ecuación.
Ubica cada par (x,y) como un punto en el plano.
Traza una línea que conecte los puntos (si es una función lineal).
CÓMO REPRESENTAR FUNCIONES EN EL PLANO CARTESIANO ...
4.-Como se opera con vectores?
Las operaciones con vectores (suma, resta y multiplicación) se realizan principalmente componente a componente (analíticamente) o mediante métodos geométricos (gráfico). La suma se obtiene sumando componentes correspondientes, la resta restando componentes, y la multiplicación por escalar escala cada componente, mientras que el producto vectorial genera un nuevo vector perpendicular.


Si tenemos dos vectores y , entonces la suma de y es
En otras palabras, el vector suma de y es el vector que resulta de sumar las componentes respectivas de estos vectores: la primera componente de se suma con la primera componente de , y la segunda componente de se suma con la segunda componente de .
Interpretación gráfica de la suma
Observemos la siguiente gráfica que muestra la suma de los vectores y :
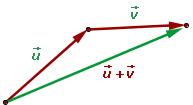
Si y son dos vectores libres, entonces para sumarlos gráficamente primero se elige el representante de cuyo origen es el extremo de . Luego, es el vector cuyo origen es el origen de y cuyo extremo es el extremo de
Notemos que también se puede elegir un representante de tal que su origen sea el extremo de . La suma tendrá el mismo valor, pero ahora la obtendremos uniendo el origen de con el extremo de
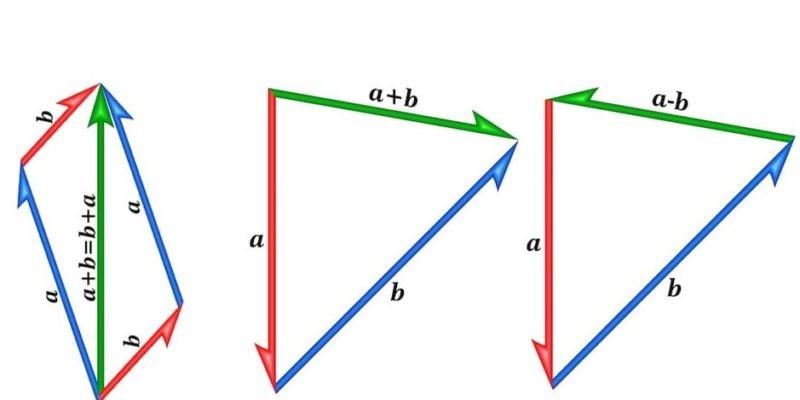
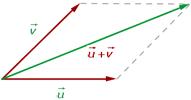
Regla del paralelogramo
Lo que discutimos anteriormente como la suma gráfica de los vectores se conoce como regla del paralelogramo. En particular, si queremos sumar dos vectores libres con origen en común, entonces debemos trazar rectas paralelas a los vectores. De esta forma se obtiene un paralelogramo cuya diagonal —que inicia en el origen de los vectores— es la suma misma de los vectores.
Observa la siguiente figura que muestra la regla del paralelogramo.
Resta de vectores
La resta de dos vectores y simplemente es la suma de con (es decir, el opuesto de ).
De este modo, si consideramos los componentes de y , entonces la resta está dada por
Gráficamente, la resta de y se obtiene igual que la suma. La única diferencia es que sumamos el opuesto de . Observa la siguiente figura que muestra a y nota que en el extremo de se coloca el origen de
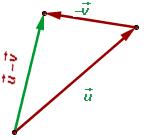
Observemos que la resta gráficamente es el vector que une el extremo de con el extremo de tal y como se puede apreciar en la siguiente figura:
Producto de vector por escalar
La multiplicación de un vector por un número se escribe o . El número también se conoce como escalar. Además, la multiplicación por escalar es otro vector que satisface las siguientes propiedades:
tiene la misma dirección que
Si es positivo, entonces tiene el mismo sentido que
Si es negativo, entonces tiene el sentido contrario que .
El módulo de es

Observemos la siguiente figura que representa la multiplicación de por 3.
En términos de componentes, si , entonces la multiplicación por escalar está dada por 5.- Cuales son los tipos de vectores...?

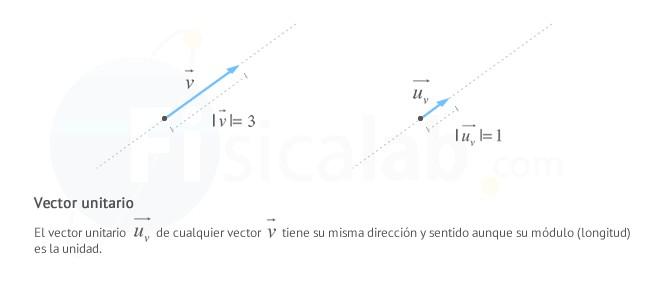
Vectores unitarios: Son todos aquellos vectores cuya longitud es la unidad, o dicho de otra forma, su módulo es igual a 1. Por ejemplo, si sabemos que el módulo de un vector es entonces se dice que es un vector unitario. Suelen utilizarse para indicar una determinada dirección. Así, si por ejemplo conocemos el vector , será el vector unitario (de módulo 1) con igual dirección y sentido que .
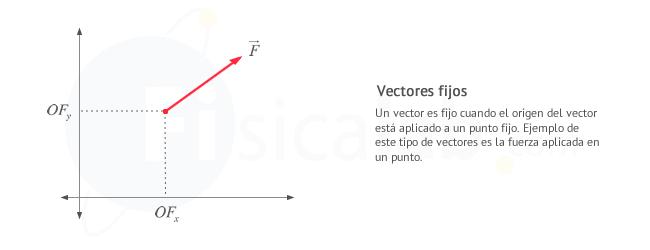
Vectores fijos: Se dice que un vector es fijo cuando el origen del vector está aplicado a un punto fijo, de modo que basta con que cambie la posición del punto de aplicación para que cambie el vector en cuestión.
Vectores libres: Se dice que un vector es libre cuando su punto de aplicación es libre o no está definido. Lo importante es su módulo, su dirección y su sentido. Por ejemplo, decimos que la velocidad de un sólido rígido es un vector libre por que puede dibujarse sobre cualquier parte del mismo.

Vectores deslizantes: Pueden trasladar el origen a lo largo de su recta soporte o línea de acción sin que por ello puedan ser considerados vectores diferentes. Por ejemplo, la fuerza que se ejerce sobre un sólido rígido.
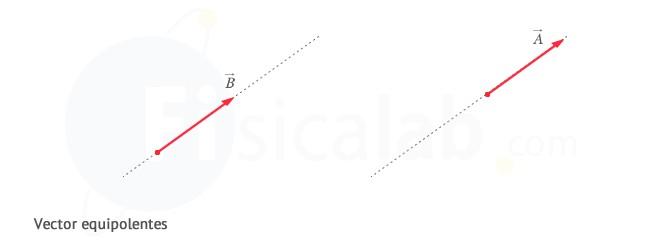
Vectores equipolentes: Son aquellos vectores libres que tienen igual módulo, dirección y sentido, aunque su punto de aplicación no coincida y no sea necesario precisarlo. Sus rectas soporte son paralelas o coincidentes. Por ejemplo, los dos vectores de la figura son equipolentes pues tienen igual módulo, dirección y sentido.
Vectores polares: Son aquellos vectores a los que se les puede asignar una dirección y un sentido de manera clara. No están ligados a ningún efecto de rotación o de giro. Por ejemplo la fuerza o la velocidad.

Vectores axiales: Están ligados a efectos de giros y normalmente se definen mediante el producto vectorial. Su módulo representa el valor numérico de la magnitud, la dirección señala el eje de rotación y el sentido del vector se hace corresponder con el sentido de giro a través del convenio de la mano derecha. Su estudio se abordará con cierto detalle en niveles más avanzados.

6.- Cuales son sus aplicaciones en la vida real y la fisica..?
Los vectores son herramientas matemáticas esenciales que representan magnitudes con dirección y sentido, fundamentales en física para calcular fuerza, velocidad, aceleración y desplazamiento. En la vida real, permiten la navegación GPS, el diseño de ingeniería estructural, la animación de videojuegos, y la optimización de trayectorias en deportes.
Aplicaciones en Física:
Mecánica y Cinemática: Representación de velocidad, aceleración y desplazamiento de objetos en movimiento.
Fuerzas: Cálculo de fuerzas en estructuras (estática), incluyendo tensión, peso y fuerza de rozamiento.
Torque (Momento de fuerza): Cálculo de la fuerza rotacional necesaria para girar objetos.
Electromagnetismo: Representación de campos eléctricos y magnéticos.
Aplicaciones en la Vida Real:
Navegación y GPS: Determinación de rutas, dirección y velocidad de aviones, barcos y automóviles.
Videojuegos y Computación: Renderizado de gráficos 2D/3D y movimiento de personajes.
Deportes: Análisis de la trayectoria de balones (fútbol, baloncesto) y fuerzas aplicadas.
Ingeniería y Arquitectura: Diseño de estructuras eficientes y seguras.
Meteorología: Descripción de la dirección y velocidad del viento.