

Antonios Mavrotas
antoniosmavrotas@gmail.com
+33645532749
https://github.com/Antonios-M
Antonios Mavrotas
Contents
1 2 3 4 5 6
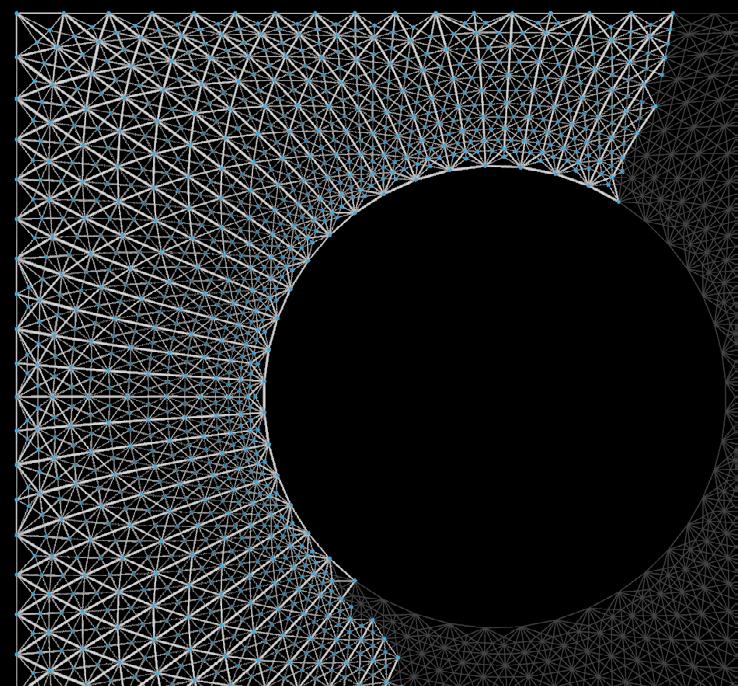
Machine Learning: Predicting Evacuation Performance of Floor Plans
tools: pytorch, pyGAD, networkx, geopandas, shapely (Published on TU Delft Digipedia) (github)
Grasshopper C# Plugin Development: Development of geometric utility plugins and API async request plugins used for API calls to TomTom traffic API (only geometric plugins included in github).
tools: C#, Rhinocommon, RTree, System.Threading.Tasks (github)
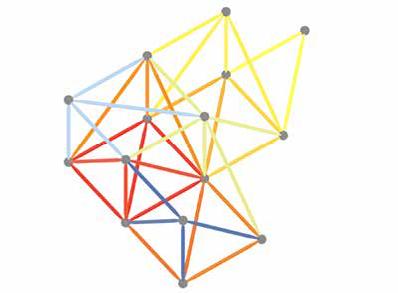
Computational Design (Python): Python tool for the optimisaton of the robotic assembly sequence of 3-dimensional pin-jointed structures
main python tools: networkx, rhinoscriptsyntax (github)
Computational Design (Grasshopper, Ladybug): Multi-objective environmental optimisation of voxelised architectural tower typologies
main tools: Grasshopper, Rhino7, Ladybug tools, Python, Wallacei (dissertation)
Preliminary Structural Design: Karamba FEA analysis for Technoledge Glass Structures
main tools: Grasshopper, Karamba3D
Web Development:Portfolio and Postcard small business for friend
main tools: HTML, tailwindCSS, Javascript, JQuery (website link)
Machine Learning: Predicting Evacuation Performance of Floor Plans
(Published on TU Delft Digipedia) (github)
Project Goals
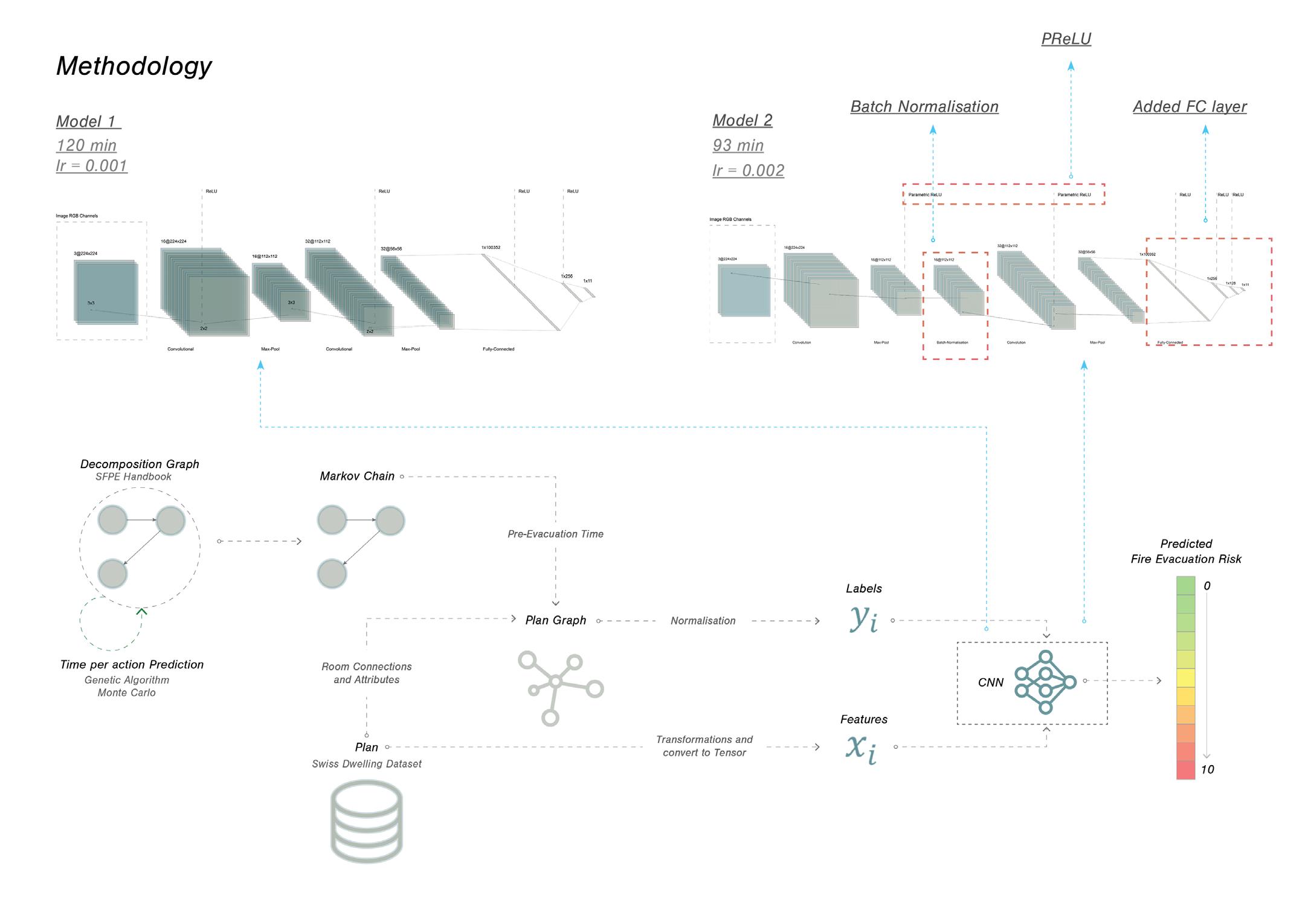
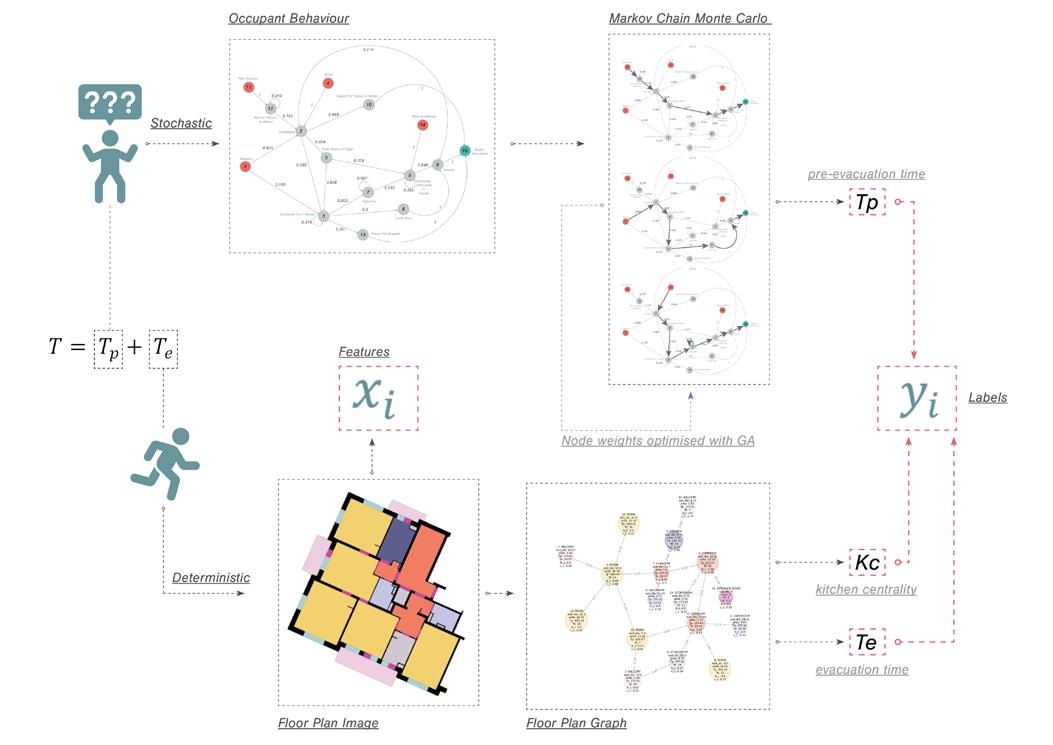
This work proposes an attempt at predicting the expected evacuation time of an architectural floor plan. Total evacuation time is considered as the sum of pre-evacuation, and evacuation time intervals. Pre-evacuation time is taken as the moments before occupants become alert of the fire, or the actions occupants take before attempting to evacuate, such as attempting to rescue others. Evacuation time is then taken as the expected time for an occupant to exit the apartment
Pre-Evacuation Time
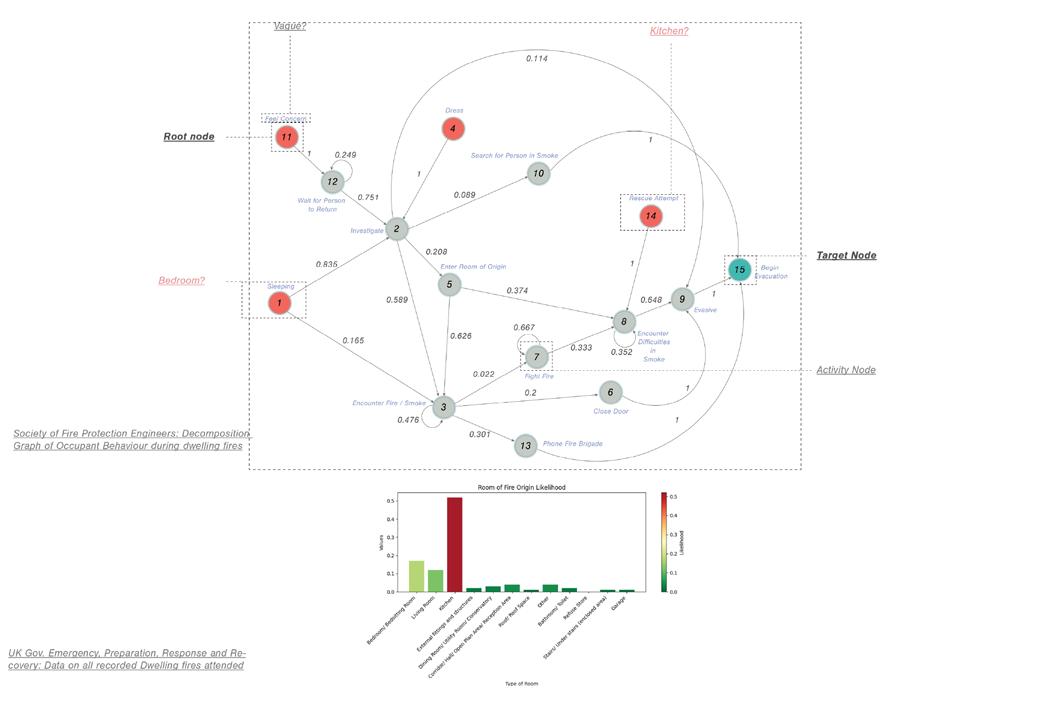
Pre-evacuation time is predicted using Monte Carlo simulations on a Markov Chain (MCMC), with a Markov Chain representing occupant actions. Nodes of the Markov chain are taken as occupant actions from the IHFSE, the likelihood (0 to 1) of progressing from one action to another is predicted using the Genetic Algorithm on the MCMC, given the total expected pre evacuation time of a path in the Markov Chain.
Constructing Training Labels
Modelling Pre-Evacuation Behaviour
Evacuation Time
Evacuation time is taken as the mean of the predicted evacuation times from each room to the exit. This is further weighted with the betweenness-centrality and closeness-centrality metrics of the kitchen: a well-connected kitchen is seen as a risk, since about 50% of dwelling fires start in the kitchen.
2 C# Plugin Development:
Geomtric Utility Plugins
A plugin aimed at relaxing a set of circles with varied radii. It is currently working procedurally with a trigger and data recorder used to create animations of the circle relaxation.



Recursive algorithm that finds the furthest points, given a set of candidate points and a set of obstacle points. With each recursive call the obstacles list is updated to include the previous furthest point


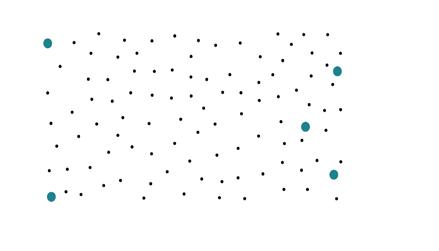
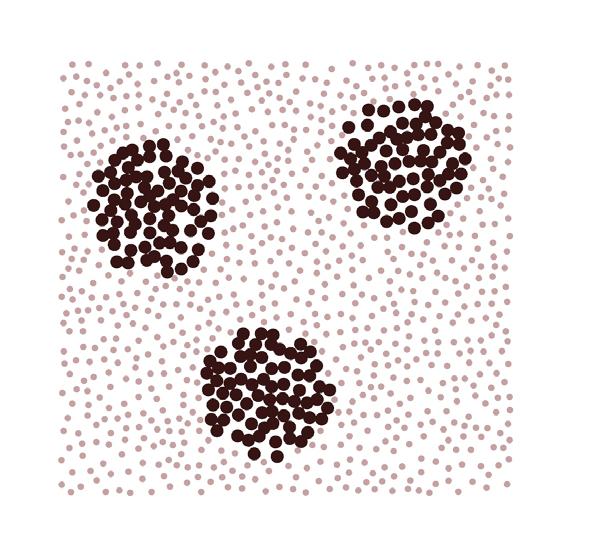
Nearest neighbour search using R-Tree, used to cluster points given a point cloud, a set of focus points and a distance. For a cloud of 7,000 points CPR is 6 times faster than PointInCurve in grasshopper.
API request plugins

A plugin used to make an asynchronous GET request, so that downstream components are not expired until after the response has been received from the server. It was used for personal use, with a hard-coded default api key for TomTom’s traffic api service, and thus not included in the github repo.

A plugin used to make a set of asynchronous GET request, given a list of urls. This was also used for personal use with TomTom’s traffic api.
Obstacle Points
First Furthest Point
Second Furthest Point
Computational Design (Python): Python
structures (github)





Tool updating
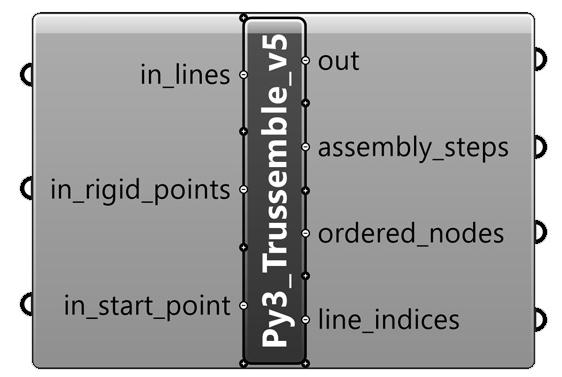
The project focused on using two robots to assemble the re-designed roof of the British Museum as a pin-jointed structure.
I was solely responsible for developing the python script which calculated the assembly steps, given a set of lines (struts) to assemble, a starting point, and a set of rigid points (supports). The most rewarding and challenging part of the project was that after testing the script myself, I would have to share it with my colleagues who used it on a variety of test geometries and truss configurations which I hadn’t tested myself, this is why I had to update the script 5 times over the course of the project: teammates either found bugs or the assembly sequence would result in large cantilevers and therefore unacceptable deflections or high internal forces, needing the assembly path to be changed.
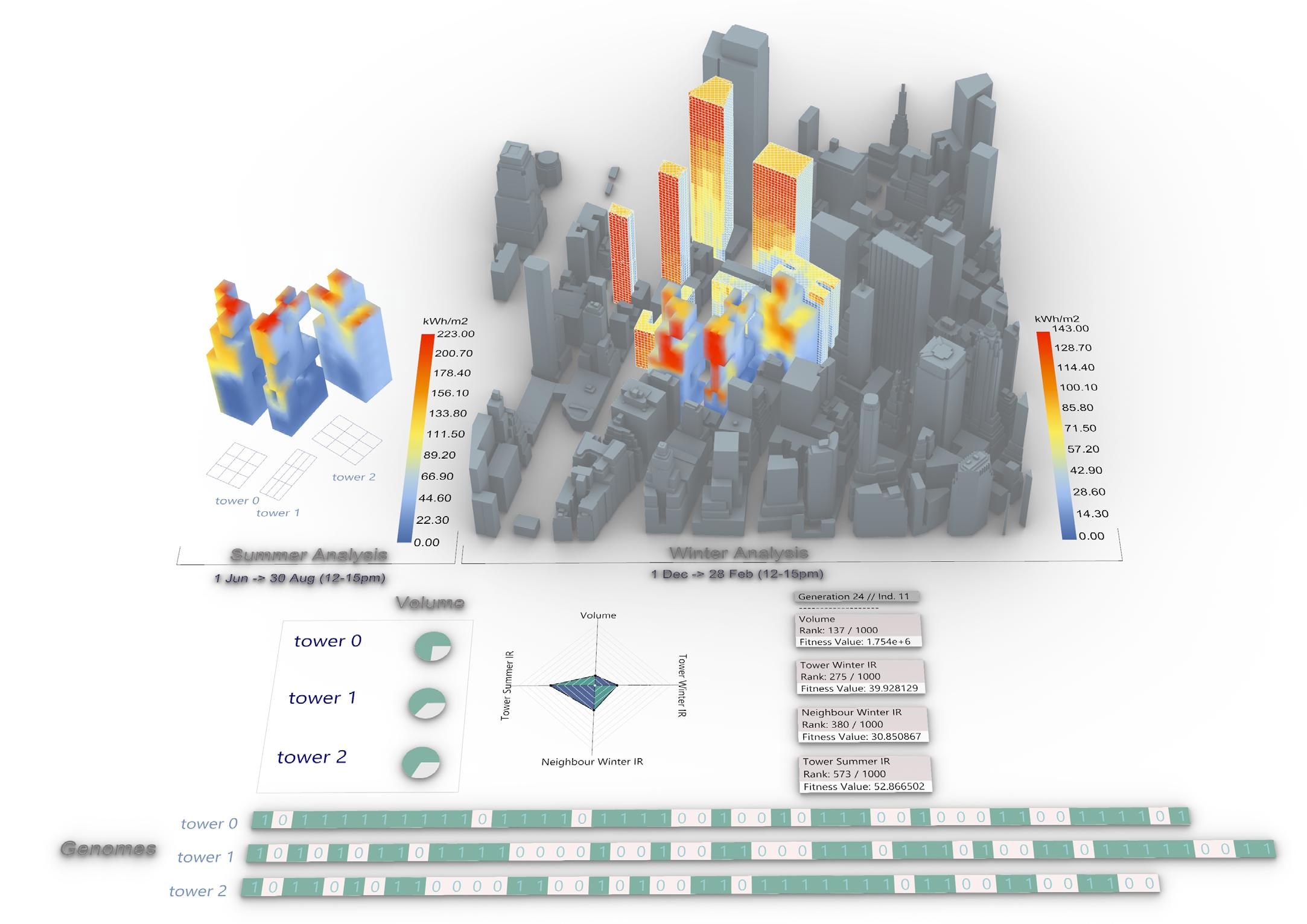
Computational Design (Grassho pper, Ladybug):Multi-objective environmental optimisation of voxelised architectural tower typologies (dissertation)
This project was the first time I was really exposed to computation and environmental design using ladybug in my undergraduate studies. It was what sparked my interest for pursuing a more technical masters course.
The project is concerned with early-stage environmental optimisation, using Wallacei and Ladybug for Grasshopper. Briefly, the optimisation is occuring on a set of voxelised buildings, with each voxel able to be 0 or 1, empty or not; based on its effect on self- and neighbour-incident irradiance.
While the environmental analysis methodology was rather naive and the scope of optimisation too broad, I nonetheless achieved some level of optmisation of the overheated and underheated periods (labelled as Summer and Winter).
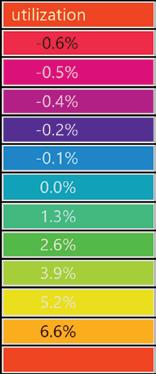


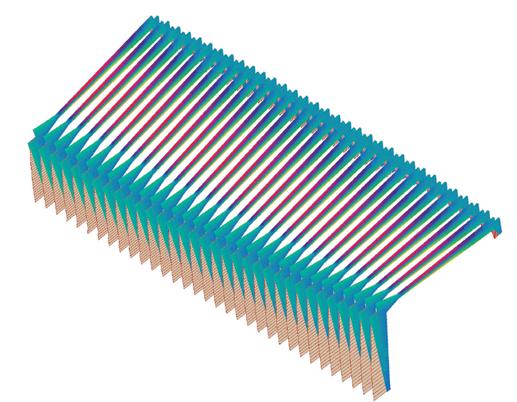
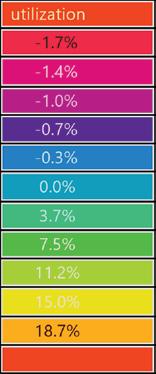
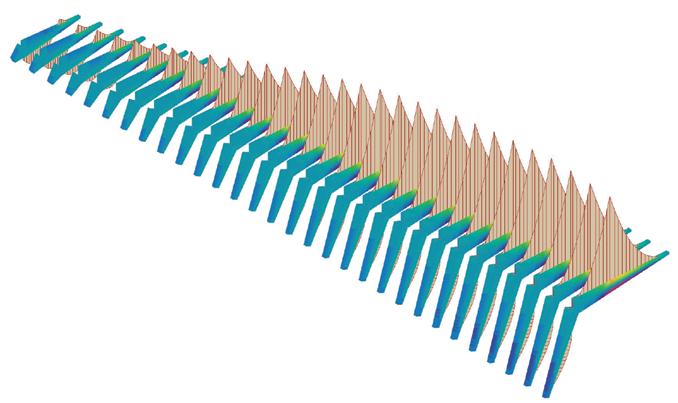
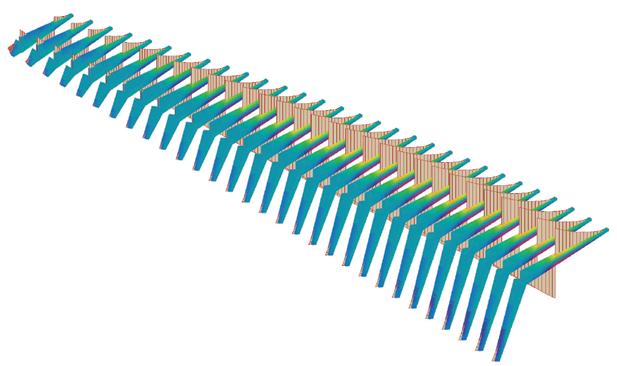

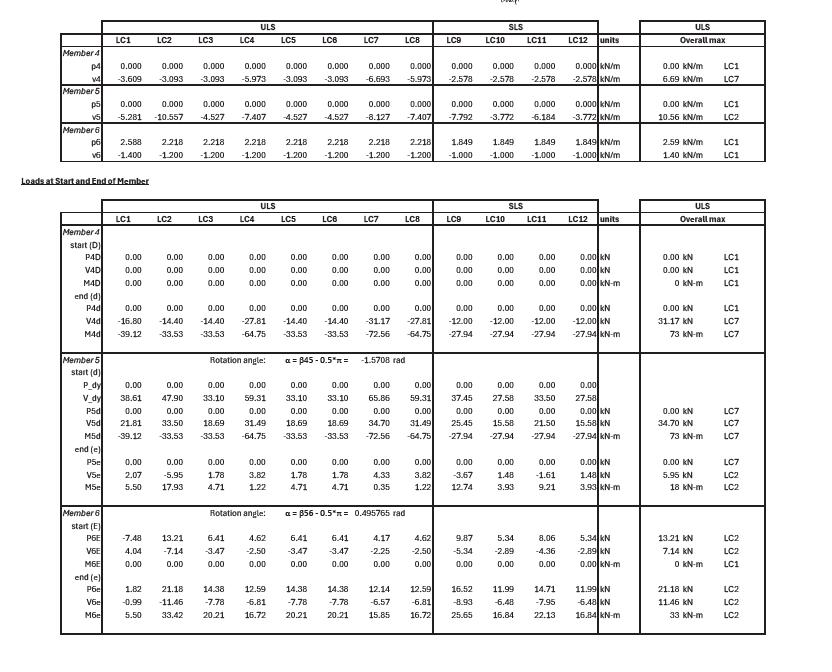
Verifying Results
During this project, I was responsible for modelling our project in Karamba and retrieving initial estimates of internal forces and bending moments. These were then verified by my teammate who was a professionally trained Structural Engineer, with a custom tool she made in Excel. Since the beam design had to be tapered because of the very long spans, it was difficult for her to test many options quickly in Excel and find a favourable tapering profile. Conversly, it was very easy for me to test many tapering options and spans and find a handful of options with minimal internal forces / bending moments. These options were then tested in the excel tool by my teammate and the best one was chosen. It was one of the most rewarding teamwork experiences I have had.
Bending Moment
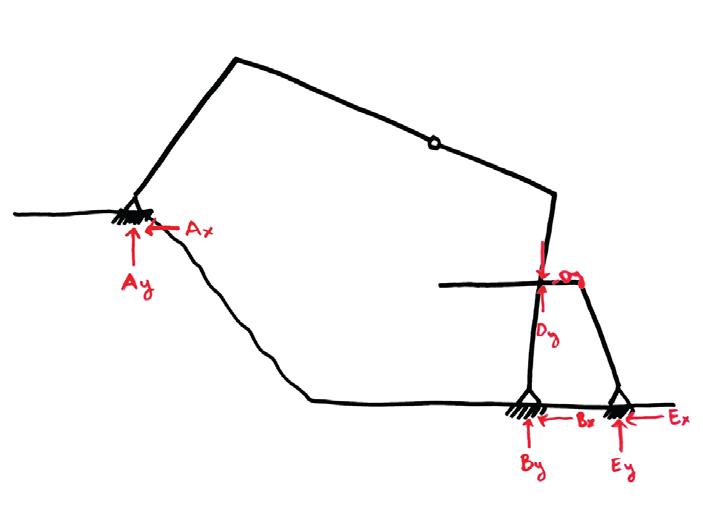
3-Pin Frame
Mezanine
Bending Moment
Shear Force
Shear Force
Normal Force
Normal Force
Development:Portfolio and Postcard website for the small buisness of a friend (website link)
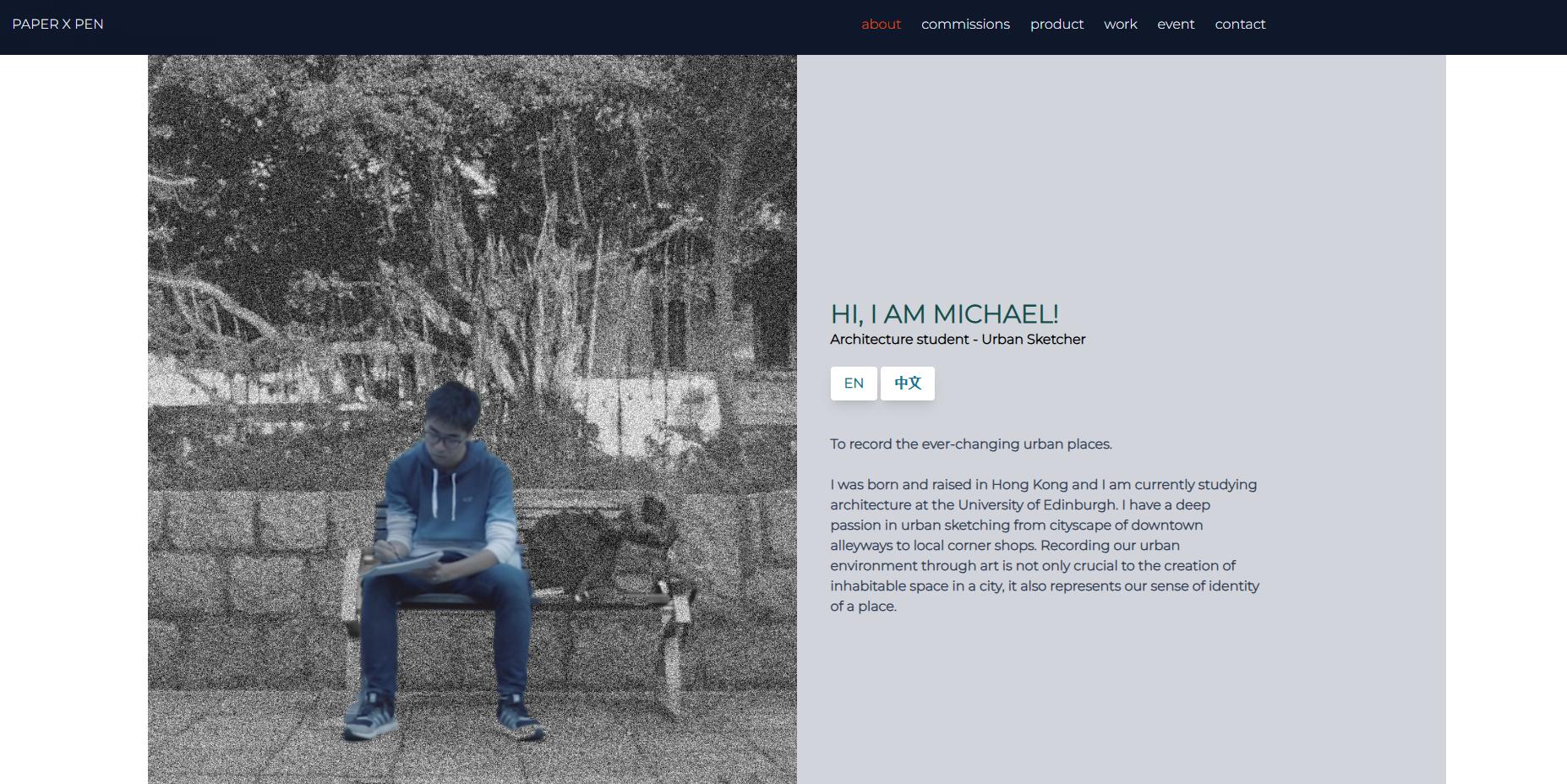
This website, allthough not directly related to the AEC industry was my first experience in developing software and exposed me to using tools like HTML, CSS, Javascript (jquery) and json to structure and display data in a frontend application.
This proved valuable later on during my work at OMRT but also in my machine learning projects as I have to interact with json-structured or xml-structured geometric data or metadata when uploading results to online dashboards for clients at my work or when using GIS APIs for my current thesis to download and store data as geojson files

First development experience
Mobile