
Email: sofianita@uitm.edu.my
Mobile devices are widely used by most people in the world. Developing an augmented reality (AR) enabled system on mobile devices can make people learn more interactively instead of using camera filters Act of realism is one of the main factors for the system ideation and approaches. Interactions between the real world and the virtual world also show how virtual objects can do the same thing as the real objects do which brings the execution of AR [1]. The broad range of technology can bring humans with machine easily. The world right now is connected without restrictions through the online platform. Everything is on the fingertips and it makes the user have full control on what they want and desire for. An application that really helps users on their daily life is what they need right now, such as for dermatological diagnosis [2] that assist users to identify main skin diseases using three main languages and child tracking observation and location tracking system [3].
ISSN: 1693 6930, DOI: 10.12928/TELKOMNIKA.v20i5 24097
Sofianita Mutalib1,2 , Mohd Alif Izhar1 , Shuzlina Abdul Rahman1,2 , Mohd Zaki Zakaria1,2 , Mastura Hanafiah3
PRO-VAS: utilizing AR and VSLAM for mobile apps development in visualizing objects
1064
Keywords: Augmented reality Mobile apps RGB D VslamVisualizationcamera
Article history:
Article Info ABSTRACT
3Accenture Solutions Sdn Bhd, Malaysia, Level 29 & 30, Menara Exchange, 106, Lingkaran TRX, Tun Razak Exchange, 55188 Kuala Lumpur, Wilayah Persekutuan Kuala Lumpur, Malaysia
Corresponding Author: Sofianita Mutalib Research Initiave Group Intelligent Systems, Faculty of Computer and Mathematical Sciences Universiti Teknologi MARA, 40450 Shah Alam, Selangor, Malaysia
1Faculty of Computer and Mathematical Sciences, Universiti Teknologi MARA, 40450 Shah Alam, Selangor, Malaysia
The development of mobile apps with augmented reality (AR) would enhance the capability in visualizing the scene or environment. Any apps supported by computer aided design versions with 3D models makes the design more realistic, such as in the form of websites or mobile apps. However, the current features for online platforms for shopping are quite limited and lack 3D visualization features. This paper presents the development of a mobile application, pro visualizer app called PRO VAS, that utilizes AR for scanning and visualizing the environment. PRO VAS acts as a product visualizer that applies visual simultaneous localization and mapping (VSLAM) for localization of the product in AR based systems. The main components of PRO VAS are ARCore from Google for interactive purposes, and the depth mapping from red green blue depth (RGB D) phone camera with point plane generator and markerless tracking method. The last component of the app is the set of objects from the unity store, which can be chosen in PRO VAS for the scanned scene area. The app was tested in various environments involving different objects and has shown competitive results. In the future, more features and products can be added to the apps
1. INTRODUCTION
Accepted Aug 09, 2022
Revised Jul 27, 2022
Journal homepage: http://telkomnika.uad.ac.id
2Research Initiative Group Intelligent Systems, Faculty of Computer and Mathematical Sciences, Universiti Teknologi MARA, 40450 Shah Alam, Selangor, Malaysia
TELKOMNIKA Telecommunication Computing Electronics and Control Vol. 20, No. 5, October 2022, pp. 1064~1072
This is an open access article under the CC BY SA license.
Received Sep 20, 2021

PRO VAS: utilizing AR and VSLAM for mobile apps development in … (Sofianita Mutalib)
Figure 1. Interface of (a) Houzz and (b) Intiaro apps
Intiaro is a platform where users can buy and sell their products in the mobile application as shown in Figure 1(b), which makes the functionality more interesting. A group of developers in Intiaro can do 3D model design for users throughout the world including business organizations or individuals. The functionality supports entrepreneurs in furniture and interior design industries [13]. The 3D digitization and AR mobile application makes all furnitures in the application unscalable and makes the application realistic in which the measurements haveto be exactly the same with the real products [14] with a high level visualization.
1065
Our paper proposed an app that can visualize objects and provides mapping of the scene. The interaction that happens between the real time and virtual reality is based on the pose estimation, which is based on points, lines, distance and lines formation that estimate the geographical data of the environment [4]. Visual simultaneous localization and mapping (VSLAM) is usually used in the robotics field in order to simultaneously localize and create maps for the robot to move around the environment [5], [6]. Depth cameras can produce red green blue depth (RGB D) mapping widely even if there is a phone that have a LiDAR sensor like iPhone 12. Commonly, the simultaneous localization and mapping (SLAM) features that are applied in applications have limitation in reading the visual images and points of the environment, especially to in mapping the environment data [6], [7]. Meanwhile, most applications that use markerless tracking do not meet the realistic view as it should be.
2. SIMILAR MOBILE APPS AND LIMITATIONS
IKEA practices the concept of minimalism which can be applied to most homes in the world. As time goes by, IKEA has collected all the data from the company into a database and made it available to be used in mobile applications with augmented reality [8] in IKEA catalog and IKEA store. IKEA wanted to ensure that the customers experience new ways of buying products with the aid of augmented reality [9]. The idea of IKEA Place app has profoundly to be the most creative way to solve the practical way where customers need to view and survey the product first before visiting the physical shop. With a list of 2000 objects and accessories, it wasproven that this application could help the customers to choose perfect products for their houses [10], [11].
2.3. Intiaro
2.2. Houzz
(a) (b)
This work aims to produce a mobile app that can scan and visualise the environment in real time thus helping the user to choose the right furniture or products for designing their interior house. The contribution of this paper includes: 1) the use of VSLAM for localization of the object; and 2) the proposed components for the apps namely, AR, VSLAM, point plane, RGB D mapping and markerless tracking method. These components create distinct characteristics compared to other existing similar mobile apps. The remainder of this paper is organised as: section 2 describes the past studies and presents the similar mobile apps in the market. Section 3 presents the components of the pro visualizer app (PRO VAS) while section 4 discusses the development. The results and findings of the study are presented in section 5 and finally, section 6 concludes the paper.
TELKOMNIKA Telecommun Comput El Control
2.1. IKEA Place
Houzz is another interior design mobile application that uses AR, with idea trends and the price for every single product displayed on the application as shown in Figure 1(a). Through commenting features, the user engagement will be increasing, and it can be considered as a reference point for ensuring that users make the right choice [11]. This new feature can detect the floor orientation and users have the capability to estimate the amount of tile needed to put inside their house. The developers also expand the functionality of the app whereby users can decorate their walls with the vertical plane detection feature [12].

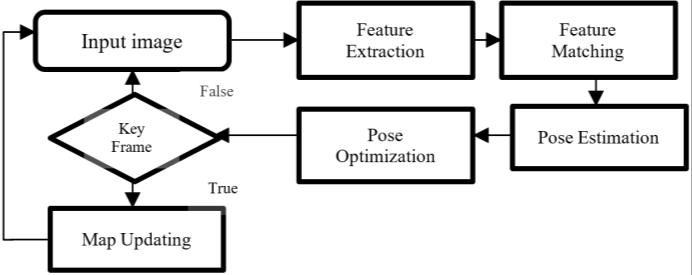
The most important component in this project is the VSLAM. VSLAM is used to identify visual images, angles and points on the surface. VSLAM is an algorithm that is usually used on robots that can navigate throughout the environment with the help of the vision sensor [18]. The VSLAM allows the robot to navigate and clean the larger spaces in satisfying straight lines. The challenge in the VSLAM algorithm is on the dynamic illustration of the multi segmentation target on the scene captured by the camera sensors [19]. The VSLAM algorithm consists of several main components, which are feature extraction, feature matching, pose estimation, pose optimization and map updating, as shown in Figure 2. Feature extraction functionality extracts every single image that is captured as the camera sensors move and change its position. Feature matching functionality creates a map based on the extraction made from the RGB D camera sensors. Pose estimation estimates the camera rotation based on position and angle. Pose optimization minimizes the error made when estimating the coordination of the camera pose. Map updating updates the map created based on every single camera orientation [19]. SLAM is a method to map the environment and represent it in a collection of points. In order to take advantage of the last success of graph based approaches on SLAM, the framework is constructed based on the advanced feature based SLAM system, orbital (ORB) SLAM. This allows us to take advantage of the sparsity of the outline and at the same time joining more semantically the important geometric primitives such as planes within the outline [7], [20], [21].
RGB D mapping is required to provide a 3D dense mapping for the system in indoor environment. This detection and mapping for objects in the indoor environments could help many events such as detecting the earthquakes and catastrophic events. A typical setup comprises a set of RGB D cameras positioned equally tall, encompassing a volume in which people/objects in the scene will be localized and followed. The calibration of the camera utilizes the RGB camera of each sensor alongside the common framework design A huge lattice is set on the floor in a unique position by all cameras and pictures are procured and calibrated utilizing ordinary grid based calibration. Depth camera will collect the point cloud density and turn into a 3D modelling data to configure the points around the environment. The sparse features are then moved to random sample consensus (RANSAC) to estimate the geometrical transformation in the computer view and perception. Then it will build a point cloud map with the global optimization based on the geometrical point estimation. The map is then used by the mobile devices to generate plane [22].
One of the methods on applying AR is using ARCore to track position of mobile devices as it moves and builds the knowledge of the surrounding environment. It also can detect the point whenever the mobile devices move. The contour detection with the wall paint is developed by using OpenCV, a library that comes along with Python programming [16]. Among important classes in AR Systems are task focus, nature of augmentation, and OP a S for interaction modelling [1]. The nature of augmentation can be divided into two parts which are execution and evaluation. For the execution part, the user can perform a lot of quality tasks, while the evaluation part is based on the user perception in which much realistic information will be provided to the user [17]
ISSN: 1693 6930 Telecommun Comput El Control, Vol. 20, No. 5, October 2022: 1064 1072
In this study, AR really takes a big part to make a great visualization. Thankfully, lots of companies consider this AR technology in their mobile applications to help users and customers make buying decisions For the development of the app, the main components are identified, where are the AR, VSLAM, point plane, RGB D mapping and markerless tracking method. Other important context is that the processes involved in the app should be helping the users to access the functions effectively [2], [3] for user satisfaction [15].
3.2. VSLAM
1066
3. THE PROPOSED COMPONENTS OF PRO-VAS APP
Figure 2. VSLAM algorithm main components, from input image to map updating
3.1. AR
3.3. RGB D mapping
TELKOMNIKA
Markerless tracking method does a big part in this study. The best thing about markerless tracking method is its functionality to detect the visual images or global positioning system (GPS) and sense them just by angles and points. Previous equipment arrangements in augmented reality constrained the user either to wear big computing gadgets or to be connected with them by means of adaptable cable. To overcome these problems, a markerless tracking system was deployed with a combination of light weight mobile setup [23]. The workflow of the markerless tracking method starts with video capturing, point tracking, planar object detection and rendering. Currently, it is hard to find the best system that can replicate markerless tracking methods applied to robotics. Nevertheless, the usage of markerless tracking methods can be implemented in many systems such as system for multimedia based application [2].
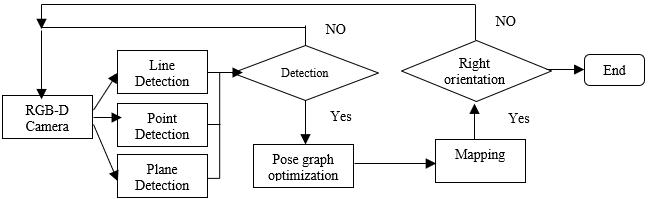
AR core session was set to activate the back facing camera with AR controller and ar camera configuration. The configuration means that the back facing camera of the device will activate this two functionalities after users have permitted the camera access for the app The development of PRO VAS involved VSLAM application together with RGB D mapping and point plane SLAM [19], [24]. The SLAM feature will produce mapping for the environment. Users needs to trace the whole environment and put an object in the space Figure 3 shows the RGB D mapping flowchart for the app. For this study, the RGB D camera used was pixel 3XL that supports depth cameras, and also it can detect line, point and plane. If the camera is able to detect any line, point or plane then it will proceed to pose graph optimization for the detected surfaces. If no line was detected, then the RGB D camera will continue to scan the environment. After pose graph optimization, it continues the mapping process. The mapping process will build a map in which the app can identify suitable locations to generate the 3D object. After that, if the camera is oriented in another direction then the RGB D camera will start over the process, with similar description in [25]. If the camera is not oriented to another direction then the process will end. Further explanation can be found in the next section 4.2.
4.1. VSLAM application in AR
Figure 3. PRO VAS flowchart
Mobile app AR Plane detection RGB D mapping/VSLAM
3.4. Markerless tracking method
PRO VAS √ Markerless √
Table 1. Comparison of PRO VAS with other apps
PRO VAS: utilizing AR and VSLAM for mobile apps development in … (Sofianita Mutalib)
4. PRO VAS DEVELOPMENT METHOD
Ikea Place √ No information Houzz √ Markerless Intiaro √ Markerless
1067
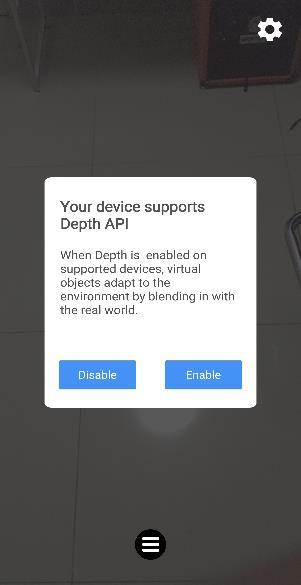
Meanwhile Figure 4 shows three main important screens of PRO VAS, since the PRO VAS is highly depending on the RGB D camera, so it will notify the user if the device is supported or not, in Figure 4(a), then if yes, the second screen will be appeared, in Figure 4(b) and guide the user to scene the area for the suitable location of the 3D objects in Figure 4(c). Finally the third screen appears to confirm the product being choosen. Without the VSLAM application, the object could be following the camera movement and do not stay at one place. Meanwhile, Table 1 shows the comparison of components in PRO VAS to other discussed apps in the previous section.
TELKOMNIKA Telecommun Comput El Control
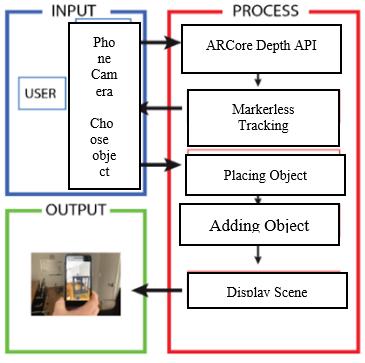
The interaction of the app is started by enabling the system access to the phone camera in choosing object, as shown in Figure 5(a) Firstly, users need to scan the environment to detect flat surfaces. Next, a collection of 3D objects that can be chosen will appear on the screen of the phone. As the app scans the environment, users can get a full control of that object by moving the object and rotating it, so the app enables users to manipulate the scene

(a) (b) (c) (d)
Figure 5. PRO VAS (a) process flow, (b) the detection of the object location with vertical plane, (c) horizontal plane, and (d) the preview of RGB D
No.
Controller component scripts have depth menu, instant placement menu, instant placement prefab and first person camera. Depth menu consists of selection whether the user wants to enable the depth application programming integration (API) and depth map. The depth API inside this application gives a full optimization on the AR users. Instant placement menu script activates the object prefab once the user generates the object into the real world. First person camera is the camera chosen which is the back facing camera to give the view of the scene to generate 3D objects. Plane discovery guide gives the guide to users on discovering the environment to detect planes. Based on Figure 4, there will be hand animation to guide
Control, Vol.
(b) (c)
ISSN: 1693 6930 El 20, 5, October 2022: 1064 1072
1068
Figure 4. PRO VAS main screens with (a) popup message when the phone supports RGB D mapping, (b) hand animation to guide the used use camera, and (c) screen in choosing the object

TELKOMNIKA Telecommun Comput

(a)

4.2. Process design

(b) (c)
Figure 6. 3D objects appearance in pro vas app in different views (a) 3d object on horizontal plane, (b) 3d object 180° at y axis, (c) 3d object 180° at x axis, and (d) 3d object closer look
5.2. Object localization
5.1. Object on horizontol plane and vertical plane
users on searching for surfaces to place objects. The prefab used for the plane is detected plane visualizer Prefab will be generated once the camera detects plane surfaces in the environment. New planes will be instantiated every time the camera finds new surfaces which are either horizontally or vertically. Figure 5(b) and Figure 5(c) show the horizontal plane and the vertical plane on the environment. Camera detected the planes as the user hover the phone over the environment surfaces. On Figure 5(d) shows the preview RGB D for the scene through PRO VAS on the phone.
PRO VAS provides an option of products to be chosen by the user that can be placed in the scene. The use of the RGB D camera makes the product/object appear as 3D objects and able to perform environment tracing. The 3D objects were downloaded from the unity asset store from the category of furniture, as shown in previous Figure 4(c). All customized fifteen objects were packaged together with models, material, texture and prefabs and assembled as a complete set of 3D object. The size of the object was designed basically the same with the exact size of furniture.
(a) (d)
4.3. Product collection
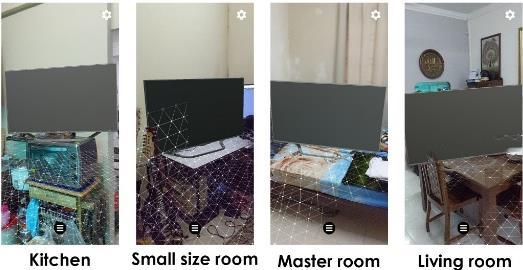
This section provides result of the augmented appearance to show the localization of an object when the camera is oriented to another direction. The outcomes of object localization for table is shown in Figure 7(a) and for television is shown in Figure 7(b). The objects were tested on different locations from different angles. The purpose of this testing was to determine whether the object would remain at the same place if the camera was oriented to another direction. The localization and mapping succeed if the objects remain at the same place when they are localized at a certain place, and they still can build a map even when the map is oriented to another direction. The location of the testing was done in a kitchen, a small size room, a master room, and a living room with 5 different customized objects which are televisions, an armchair, a floor light and a table. Objects in the master room show the best texture and shaders because the room has a good lighting whereas objects in the kitchen get less shader and texture due to not receiving enough light. The objects can also be put at different places in the room rather than on the floor.
Figure 6(a) shows a 3D object which is a chair that is placed on a carpet. The object has some shadow as it has some reflection of the sunlight. The replication of sunlight was created based on the amount of light received by the camera and applied on the 3D object. Based on Figure 6(b) and Figure 6(c), the 3D objects which are frames appeared on the vertical planes on the wall. The frame on Figure 6(b) is the 180° at the y axis while the frame in Figure 6(c) is at 180° at x axis. 3D objects are applied once the camera detects the vertical surfaces. Figure 6(d) shows that this camera angle is near the corner of the frame. There is no space between the frame and the wall, which means that the frame is precisely attached and reacts to the environment.

PRO VAS: utilizing AR and VSLAM for mobile apps development in … (Sofianita Mutalib)
TELKOMNIKA Telecommun Comput El Control
5. RESULTS AND DISCUSSION
1069



1070
[2] S. A. Hameed, A Haddad, M H Habaebi, and A Nirabi, “Dermatological diagnosis by mobile application,” Bulletin of ElectricalEngineeringandInformatics, vol. 8, no. 3, pp. 847 854, Sep 2019, doi: 10.11591/eei.v8i3.1502
We have done a market survey in order to get the feedback from the users on PRO VAS. There are 40 respondents participating in the survey, with the majority giving positive feedback. Sixty percent of respondents strongly agree that they are interested in AR features, and 57 percent agree that the objects have been visualized clearly in PRO VAS. Majority of the respondents think the app is helpful or very helpful in determining suitable furniture. Strong majority or 60 percent of them intend to install the mobile application and the majority wants to obtain a free app with the current features. 40 percent of respondents are willing to spend a range of RM5 to RM10 with more objects and buying features. Surprisingly, 8 percent are willing to pay more with more objects and ads free apps PRO VAS is rated as a good or excellent app by majority. This app can save users’ time with the measurements for the product provided and visualize in the selected space, so the users can determine whether the product is fit or not.
6. CONCLUSION
Figure 7. Location testing for two objects: (a) table and (b) television

The authors would like to express the gratitude to Ministry of Higher Education Malaysia and Research Management Center, UiTM for the FRGS 5/3 (461/2019) research grant, also to Faculty of Computer and Mathematical Sciences, UiTM, for the support in product innovation development.
5.3. Market survey
ACKNOWLEDGEMENT
(a) (b)
TELKOMNIKA
REFERENCES
ISSN: 1693 6930 Telecommun Comput El Control, Vol. 20, No. 5, October 2022: 1064 1072
[1] E. Dubois, L. Nigay, J. Troccaz, O. Chavanon, and L. Carrat, “Classification Space for Augmented Surgery, an Augmented Reality Case Study,” Proceedings of Interact’99 IOS Press, 1999, pp. 353 359 [Online] https://www.academia.edu/18842330/Classification_Space_for_Augmented_Surgery._an_Augmented_Reality_Case_StudyAvailable:
This paper presents the capability of AR objects to appear in the environment by using the VSLAM. Tracking method used in this study was markerless tracking in which the camera is not restricted on the tracking marker to create the object. By this way, it is proven that AR and VSLAM can fully connect the virtual reality and real time, so called mixed reality limitlessly. The process of localization and mapping simultaneously really helps the users to use this application and apply it in real time. Based on the testing, a good hardware and operating software that support running this application makes the VSLAM experience run smoothly. Previously, the usage of hardware such as Microsoft Kinect, which is very expensive, was needed to do the mapping. However, currently, the usage of phone cameras that already have the depth camera built in can help to ease the process of mapping the environment. It shows that this study has achieved the application of VSLAM for mobile apps with AR is successfully applied and the apps can perform smoothly as the user feedback. Google ARCore really helps a lot on the development of the system in which it has a lot of features to help developers on creating and expressing the idea of developing good multimedia based applications such as AR application. Markerless tracking method is among the best tracking method to use rather than marker based if the purpose is for wide tracking without any restriction on scanning the visual images and prevent object occlusion. RGB D camera help in creating a map that works on VSLAM to understand the environment better.
[3] M J Alam, T Chowdhury, S Hossain, S Chowdhury, and T Das, “Child tracking and hidden activities observation system through mobile app,” Indonesian Journal of Electrical Engineering and Computer Science, vol. 22, no. 3, pp. 1659 1666, 2021, doi: 10.11591/ijeecs.v22.i3.pp1659 1666
[15] N. S. Shaeeali, A. Mohamed, and S. Mutalib, “Customer reviews analytics on food delivery services in social media: a review,” IAES InternationalJournalof Artificial Intelligence (IJ AI), vol. 9, no. 4, pp. 691~699, 2020, doi: 10.11591/ijai.v9.i4.pp691 699
[20] F. Endres, J. Hess, J. Sturm, D. Cremers, and W. Burgard, “3 D mapping with an RGB D camera,” IEEE Transactions on Robotics, vol. 30, no. 1, pp. 177 187, 2014, doi: 10.1109/TRO.2013.2279412
PRO VAS: utilizing AR and VSLAM for mobile apps development in … (Sofianita Mutalib)
[13] Intiaro INC. Intiaro helps furniture retailers & brands transition their products into digital world [Online]. Available: https://en.intiaro.com/visualisation platform/ (Accessed 2021).
[22] J. Platonov, H. Heibel, P. Meier, and B. Grollmann, “A mobile markerless AR system for maintenance and repair,” 2006 IEEE/ACMInternationalSymposiumonMixedandAugmented Reality, 2006, pp. 105 108, doi: 10.1109/ISMAR.2006.297800
[25] R. Jamiruddin, A. O. Sari, J. Shabbir, and T. Anwer, “RGB Depth SLAM Review,” ArXiv, 2018, doi: 10.48550/arXiv.1805.07696
[10] S. Ozturkcan, “Service Innovation: Using Augmented Reality in the IKEA Place App,” Journal of Information Technology TeachingCases, vol. 11, no. 1, pp. 8 13, 2021, doi: 10.1177/2043886920947110.
[24] L. Zhang, D. Chen, and W. Liu, "Point plane SLAM based on line based plane segmentation approach," 2016 IEEE International ConferenceonRoboticsand Biomimetics(ROBIO), 2016, pp. 1287 1292, doi: 10.1109/ROBIO.2016.7866503.
[8] C. Alves and J. L. Reis, “The Intention to Use E Commerce Using Augmented Reality The Case of IKEA Place,” International ConferenceonInformation Technology &Systems, 2020, pp. 114 123, doi: 10.1007/978 3 030 40690 5_12
BIOGRAPHIES OF AUTHOR
[18] S. Yang, G. Fan, L. Bai, R. Li, and D. Li, “MGC VSLAM: A Meshing Based and Geometric Constraint VSLAM for Dynamic Indoor Environments,” in IEEE Access, vol. 8, pp. 81007 81021, 2020, doi: 10.1109/ACCESS.2020.2990890.
[9] S. G. Dacko, “Enabling smart retail settings via mobile augmented reality shopping apps,” Technological Forecasting and Social Change, vol. 124, pp. 243 256, 2017, doi: 10.1016/j.techfore.2016.09.032



[16] E. Dubois and L. Nigay, “Augmented Reality: Which Augmentation for Which Reality?,” DARE '00: Proceedings of DARE 2000 onDesigningaugmentedreality environments, 2000, pp. 165 166, doi: 10.1145/354666.354695.
[19] R. M Artal, J. M. M. Montiel, and J. D. Tardós, “ORB SLAM: A Versatile and Accurate Monocular SLAM System,” IEEE TransactionsonRobotics, vol. 31, no. 5, pp. 1147 1163, Oct. 2015, doi: 10.1109/TRO.2015.2463671.
Sofianita Mutalib is currently a senior lecturer in Faculty of Computer and Mathematical Sciences, Universiti Teknologi MARA (UiTM) Shah Alam. Her primary research interests involve intelligent systems, data mining as well as machine learning and also data science. She can be contacted at email: sofianita@uitm.edu.my.

[17] K. N. Al Mutib, E. A. Mattar, M. M. Alsulaiman, and H. Ramdane, “Stereo vision SLAM based indoor autonomous mobile robot navigation,” 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), 2014, pp. 1584 1589, doi: 10.1109/ROBIO.2014.7090560.
[14] R. Swaminathan, R. Schleicher, S. Burkard, R. Agurto, and S. Koleczko, “Happy Measure: Augmented Reality for Mobile Virtual Furnishing,” International Journal of Mobile Human Computer Interaction (IJMHCI), vol. 5, no.1, pp. 16 44, 2013, doi: 10.4018/jmhci.2013010102
[6] A M Azri, S A Rahman, R Hamzah, Z A Aziz, and N A Bakar, “Visual analytics of 3D LiDAR point clouds in robotics operating systems,” Bulletin of Electrical Engineering and Informatics, vol. 9, no. 2, pp. 492 499, 2020, doi: 10.11591/eei.v9i2.2061
[4] A. I. Comport, E. Marchand, and F. Chaumette, “A real time tracker for markerless augmented reality,” The Second IEEE and ACM International Symposium on Mixed and Augmented Reality, 2003. Proceedings, 2003, pp. 36 45, doi: 10.1109/ISMAR.2003.1240686.
1071
[7] M. Hosseinzadeh, Y. Latif, and I. Reid, “Sparse point plane SLAM,” University of Adelaide, Australia. Australasian Conference onRoboticsand Automation,ACRA, 2017. [Online]. Available: https://www.araa.asn.au/acra/acra2017/papers/pap170s1 file1.pdf
[11] T. Kiliç, “Investigation of mobile augmented reality applications used in the interior design,” The Turkish Online Journal of DesignArtand Communication, vol. 9, no. 2, pp. 303 317, 2019, doi: 10.7456/10902100/020
TELKOMNIKA Telecommun Comput El Control
[12] Boland, M. What’s Driving Houzz’ AR Success?. [Online]. Available: https://arinsider.co/2020/06/16/whats driving houzz ar success/ (Accessed Jun. 16, 2020).
[5] J. F Pacheco, J. R Ascencio, and J. M. R Mancha, “Visual Simultaneous Localization and Mapping: A Survey,” Artificial IntelligenceReview, no. 43, 55 81, 2015, doi: 10.1007/s10462 012 9365 8.
[21] M. Z Zakaria, S Mutalib, S A Rahman, S J Elias, and A Z Shahuddin, “Solving RFID mobile reader path problem with optimization algorithms,” Indonesian Journal of Electrical Engineering and Computer Science, vol. 13, no. 3, pp. 1110 116, 2019, doi: 10.11591/ijeecs.v13.i3.pp1110 1116
[23] I. Y H. Chen, B. MacDonald, and B. Wünsche, “Markerless Augmented Reality for robots in unprepared environments.” Australasian Conference on Robotics and Automation. ACRA08, 2008. [Online]. Available: https://www.araa.asn.au/acra/acra2008/papers/pap121s1.pdf
ISSN: 1693 6930 Vol. 20, No. 5, October 2022: 1064 1072
1072
Shuzlina Abdul Rahman is an Associate Professor of Information System in Universiti Teknologi MARA. Her teaching and primary research interests involve the computational intelligence, data mining and optimization and intelligent data analytics. She can be contacted at email: shuzlina@uitm.edu.my

Mastura Hanafiah is currently at Accenture Solutions Sdn Bhd as Business and Integration Architecture Specialist consultant. She had teaching experience as a senior lecturer in Faculty of Computer and Mathematical Sciences, Universiti Teknologi MARA (UiTM) Shah Alam. She can be contacted at email: masturahanafiah13@gmail.com.

Mohd Alif Izhar completed his bachelor’s degree at Faculty of Computer and Mathematical Sciences, Universiti Teknologi MARA (UiTM) Shah Alam, with Bachelor of Information Technology (Hons.) in Intelligent Systems Engineering. He can be contacted at email: alifizhar93@gmail.com


TELKOMNIKA Telecommun Comput El Control,
Mohd Zaki Zakaria is currently a senior lecturer in Faculty of Computer and Mathematical Sciences, Universiti Teknologi MARA (UiTM) Shah Alam. He involved in optimization projects that support decision making in engineering, agriculture and also many more. He can be contacted at email: mohdz446@uitm.edu.my