I am a computational designer and geometry engineer with 4+ years of AEC experience, skilled at working in team environments, quick to adapt to new tools, seeking an entry level role where I can contribute and learn
EDUCATION
University of Stuttgart, Germany, 10/2024
● Master of Science, Integrative Technologies and Architectural Design Research Carnegie Mellon University, Pittsburgh PA, 05/2022
● Bachelor of Architecture
● Minor in Computational Design
EXPERIENCE
Research Assistant Software Developer, University of Stuttgart Institute of Computational Design, 06/2024-09/2024
● Created a C# Grasshopper plugin for the design of fiber-reinforced-polymer structures, under a supervisor. Freelance Software Developer, RWTH Aachen University Department of Mathematics, 12/2022-08/2023
● Determined an accessible way for users to apply the 14 symmetry groups to design, in a team of 4
● Led development of a pattern-making Grasshopper plugin with via C# and Visual Studio; 1300+ downloads.
Architectural Intern, Mann Parsons Grey Architects LLC, Fairlawn OH, 06/2022-10/2022
● Digitized 15+ existing structures using Revit; Updated the firm’s website of 50+ projects using HTML & CSS
Rethinking Construction Automation Research Assistant, Carnegie Mellon University Co De Lab, 11/2021-05/2022
● Studied an active site during 3 phases of construction for the deployment of a Fetch Robot, in a team of 12.
Architectural Robotics Teaching Assistant, Carnegie Mellon University Architecture Department, 09/2020-12/2020
● Instructed 10+ students in the safety procedures and technical skills related to industrial robotics
● Corrected student robot code in the RAPID programming language to ensure correct and safe toolpaths. Head Monitor and Machine Operator, Carnegie Mellon University Digital Fabrication Lab, 10/2019-05/2022
● Operated machines in the lab: laser cutters, CNC Routers, 3D printers, vacuum formers, and robots Generative Modelling Teaching Assistant, Carnegie Mellon University Architecture Department, 09/2019-12/2021
● Guided 30+ students in computational thinking though Grasshopper, a visual programming language. Web Experience Developer, Carnegie Mellon University Architecture Department, 05/2021-09/2021
● Shaped a web-based experience of exemplary student work, using base HTML and CSS, in a team of 2 Architectural Intern, Cuyahoga County Department of Public Works Facilities Group, Cleveland OH, 05/2019-09/2020
● Designed, drafted and specified the construction of 3 signage types, with AutoCAD, individually Intro to Digital Media Teaching Assistant, Carnegie Mellon University Architecture Department, 09/2018-05/2019
● Educated 60+ beginners to engage the digital architecture mediums of Photoshop, AutoCAD, and Rhino. Architectural Intern, Perspectus Architecture LLC, Shaker Heights OH, 11/2017-09/2019
● Updated 400+ types in Revit BIM libraries; Engaged with schematic design via AutoCAD and Photoshop
AWARDS
Kuka Robotics, Robot Programming Certification, 10/2023
Manufacturing Futures Initiative PA Dept of Community and Economic Dev, Certificate, 05/2022
Carnegie Mellon University, College Honors & University Honors, 05/2022
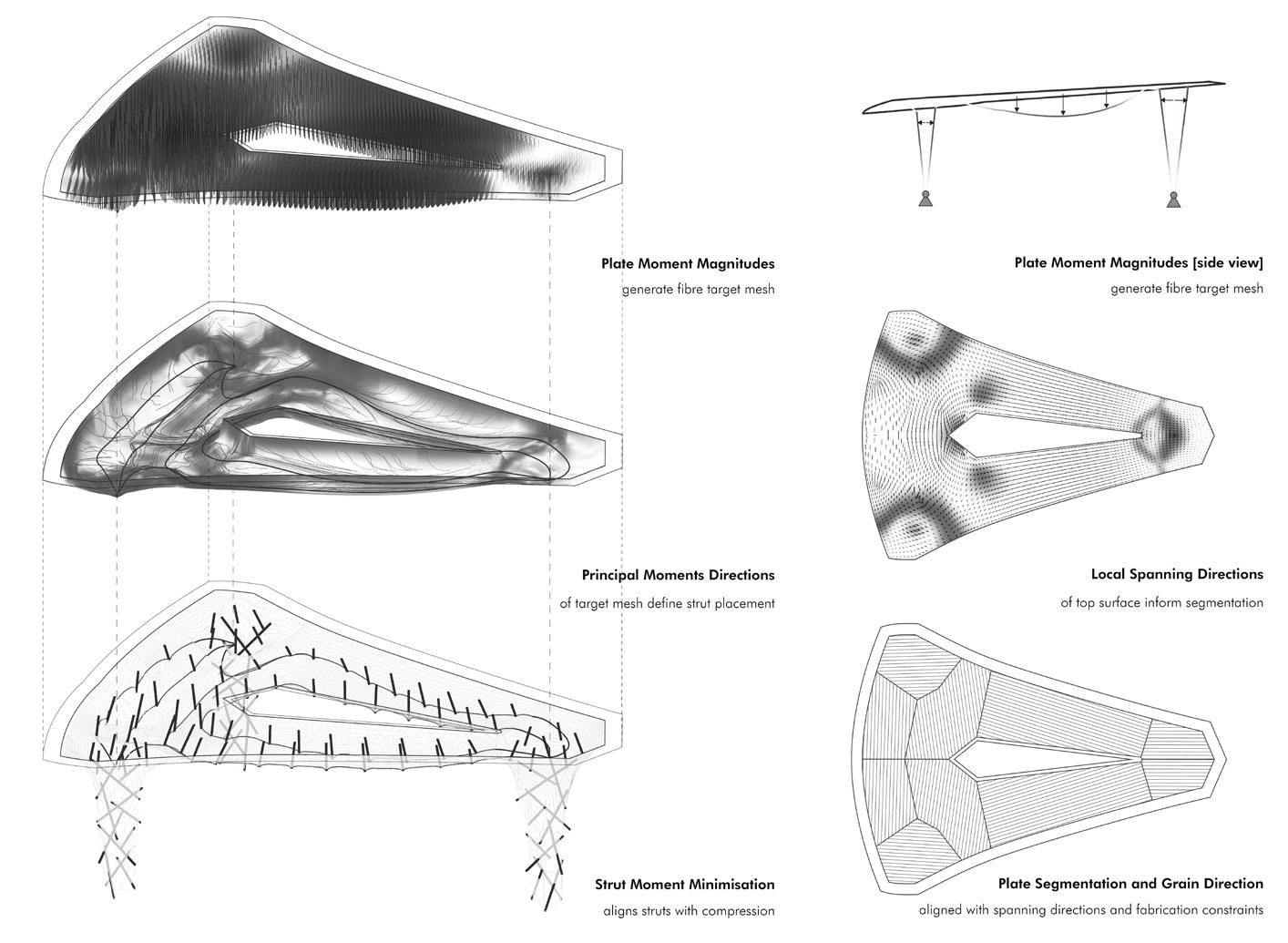
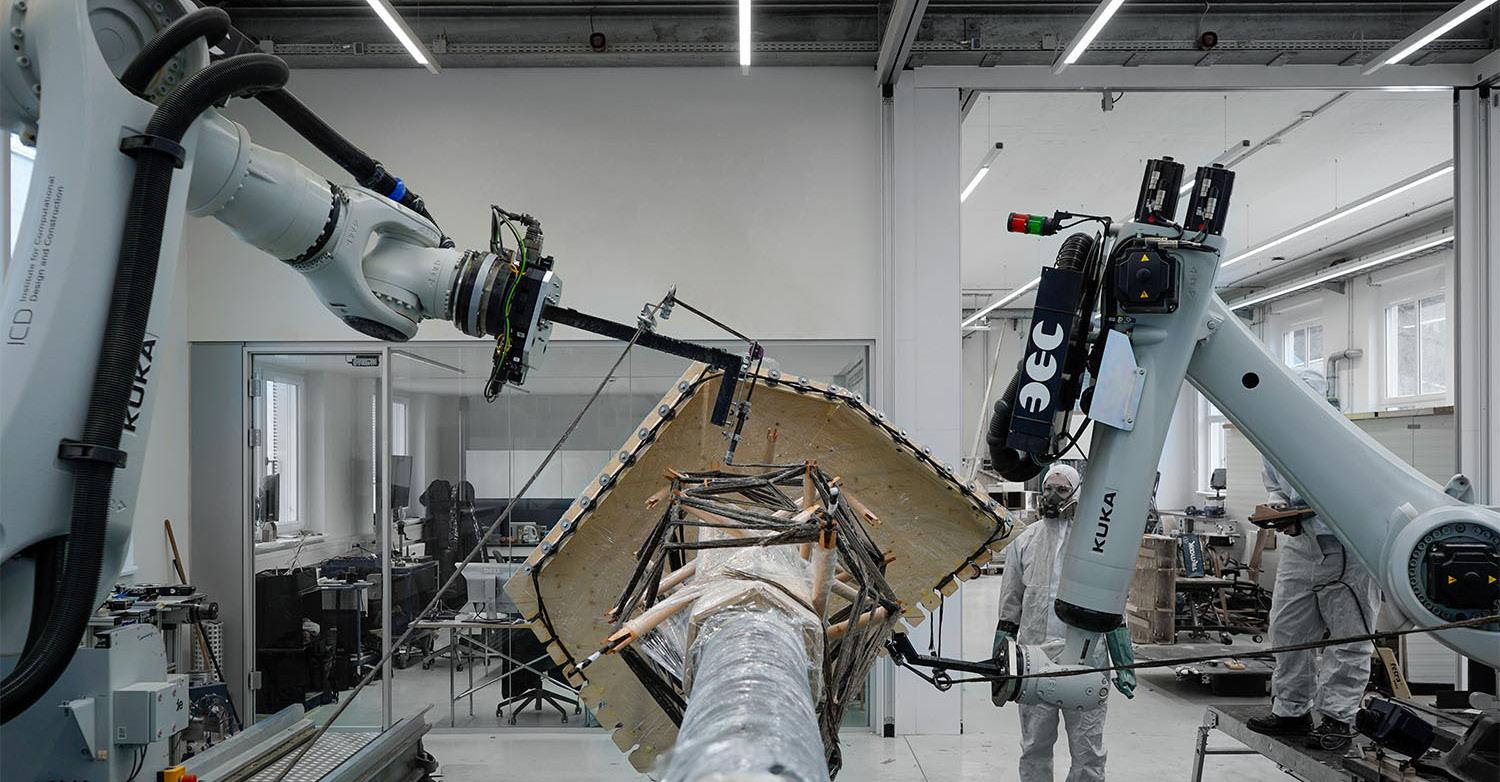
The pavilion explored potentials of designing timber and flax fiberreinforced polymer hybrid systems. The team divided the work into five groups: design, structure, syntax, joints, and fabrication.The structure team worked to tweak the relative positioning of all the FRP and timber within the structure, ensuring the smooth flow of forces from the height of the pavilion to its foundations. The syntax team composed the fiber layup of the FRP, the key to
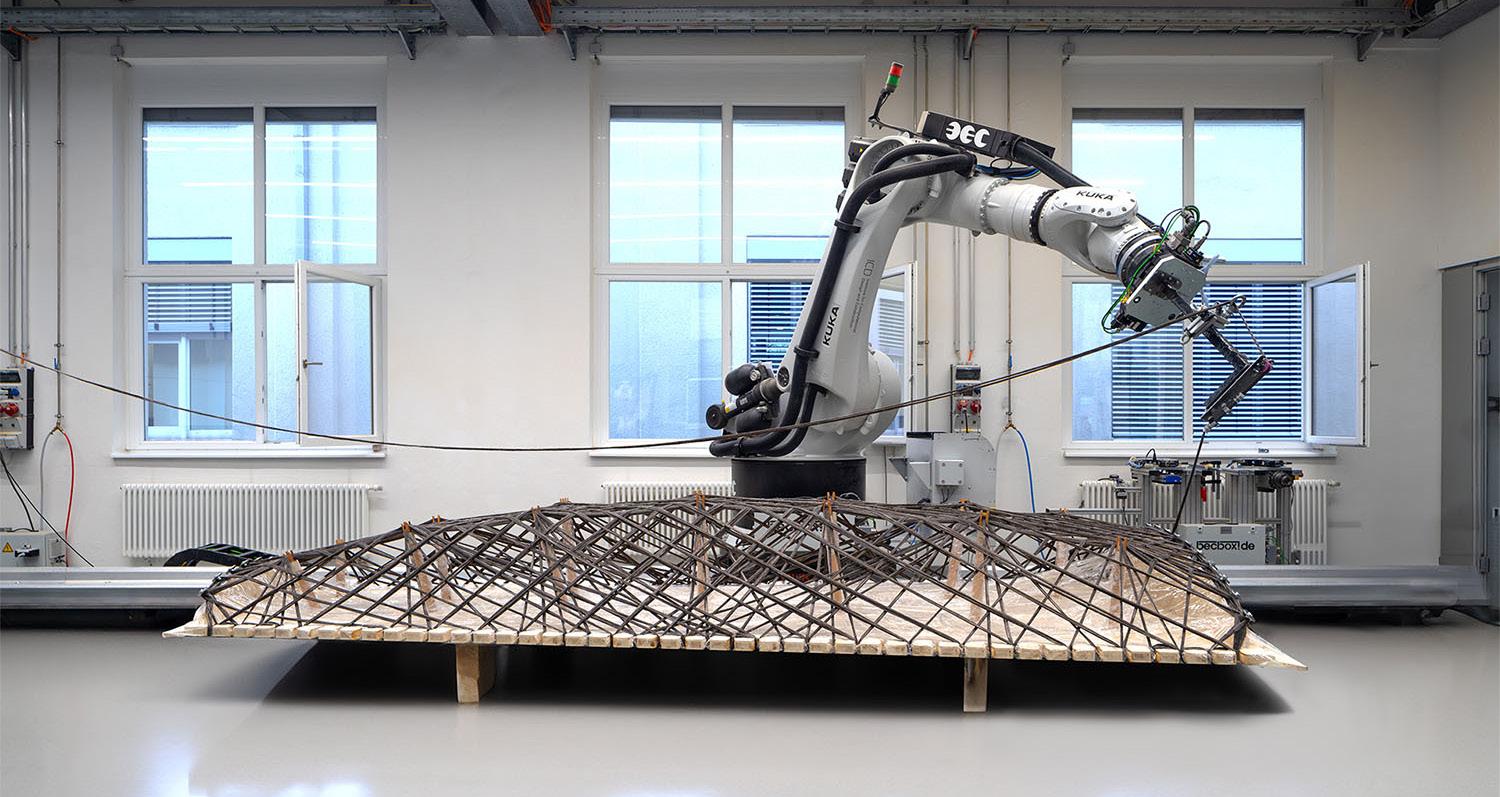
enabling the structure to be built in a way that it was most efficient. For fabrication, The robot lab was composed in two setups, one for the plate fabrication and one for the column fabrication. The plate was wound lying down, with a single robot reaching across to hook the pre-cured FRP. The column setup was more elaborate, employing the use of dual robotic winding white the piece was held on a rotating linear positioner.
The pavilion was displayed during the summer of 2024 on the University of Stuttgart’s Stadtmitte Campus. During this time, the public was invited to reside in the space underneath it experiencing how these two materials join together.
Honeycomb, a Grasshopper Plugin
When: Where: What: With: Role:
2023
University of RWTH Aachen, Department of Mathematics
Plugin for interlocking geometry and pattern creation, each derived from the 17 wallpaper groups In collaboration with Tom Görtzen and Reymond Akpanya, and Sebastian Wiesenhütter
Responsible for software development; translated mathematic logic into functioning code
https://www.food4rhino.com/en/app/ honeycomb
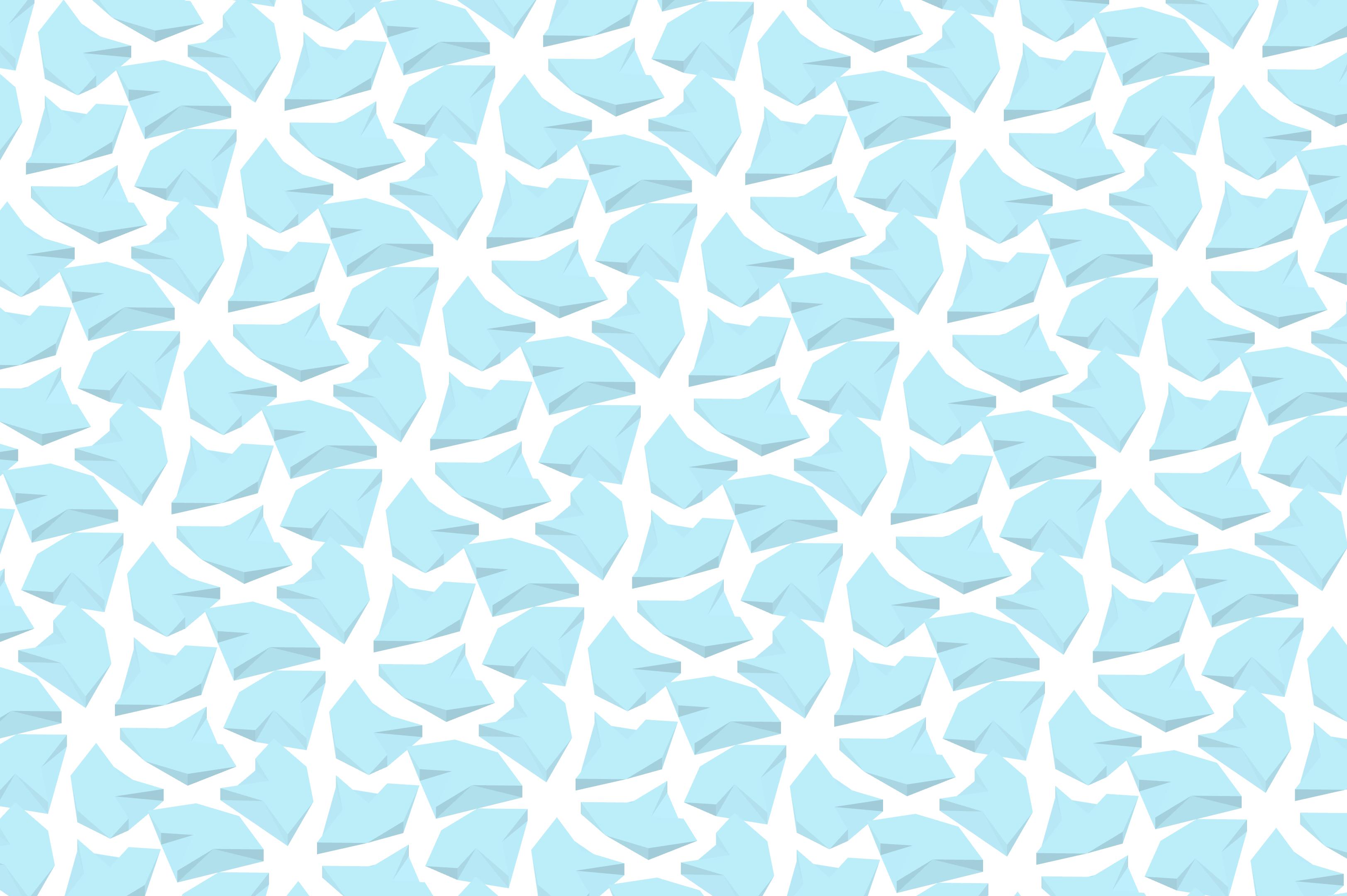
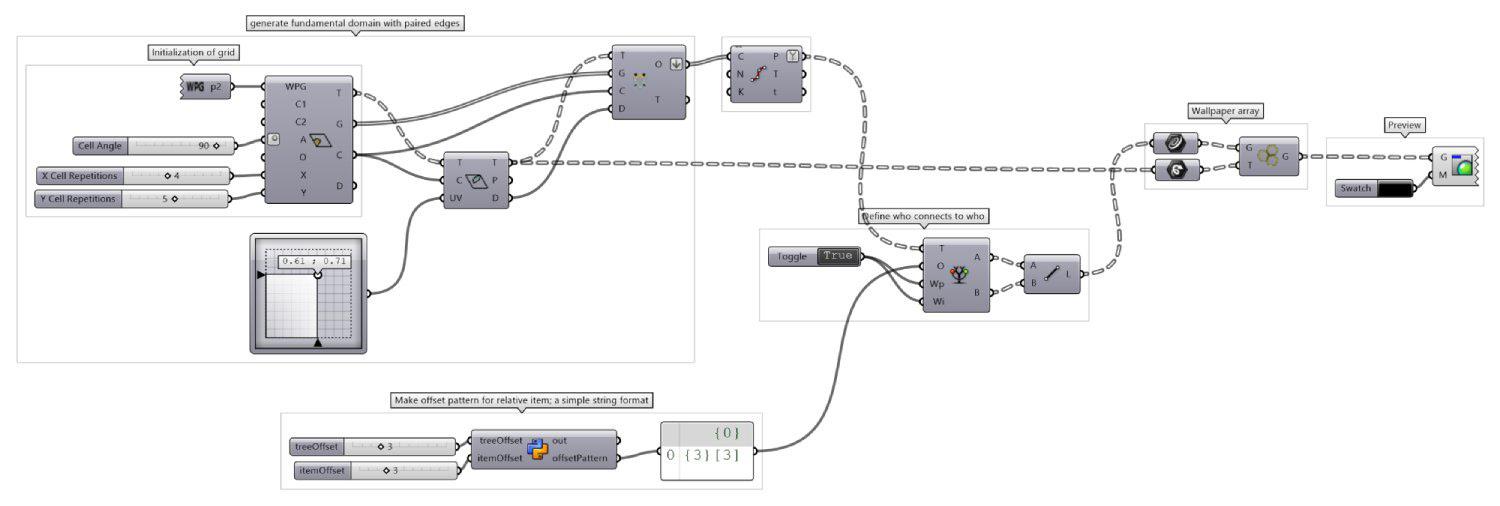
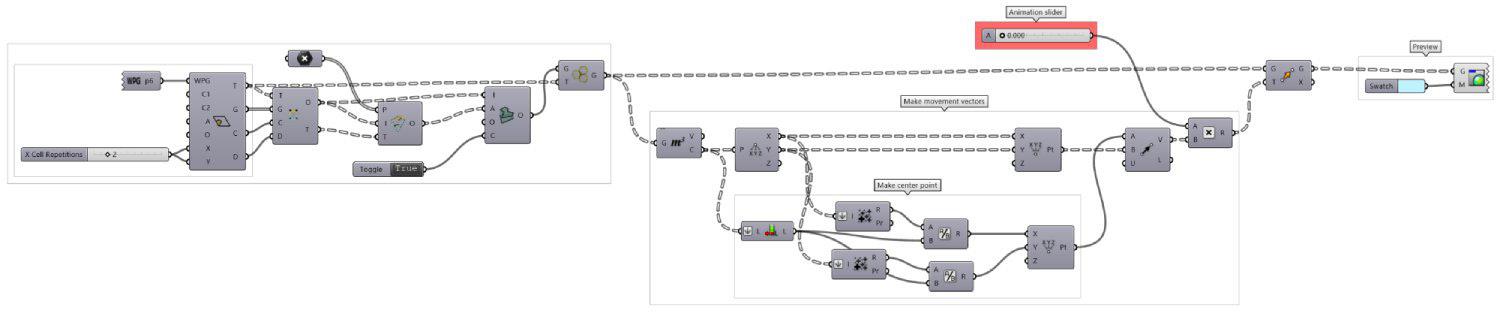
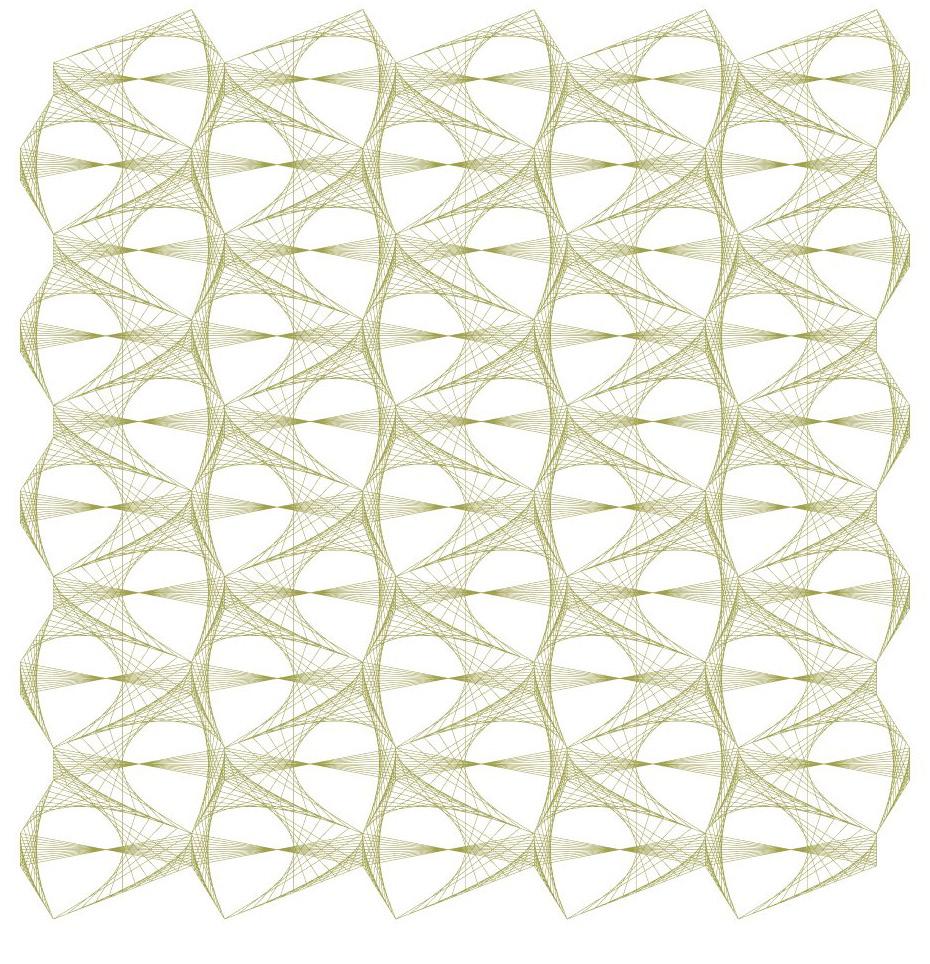
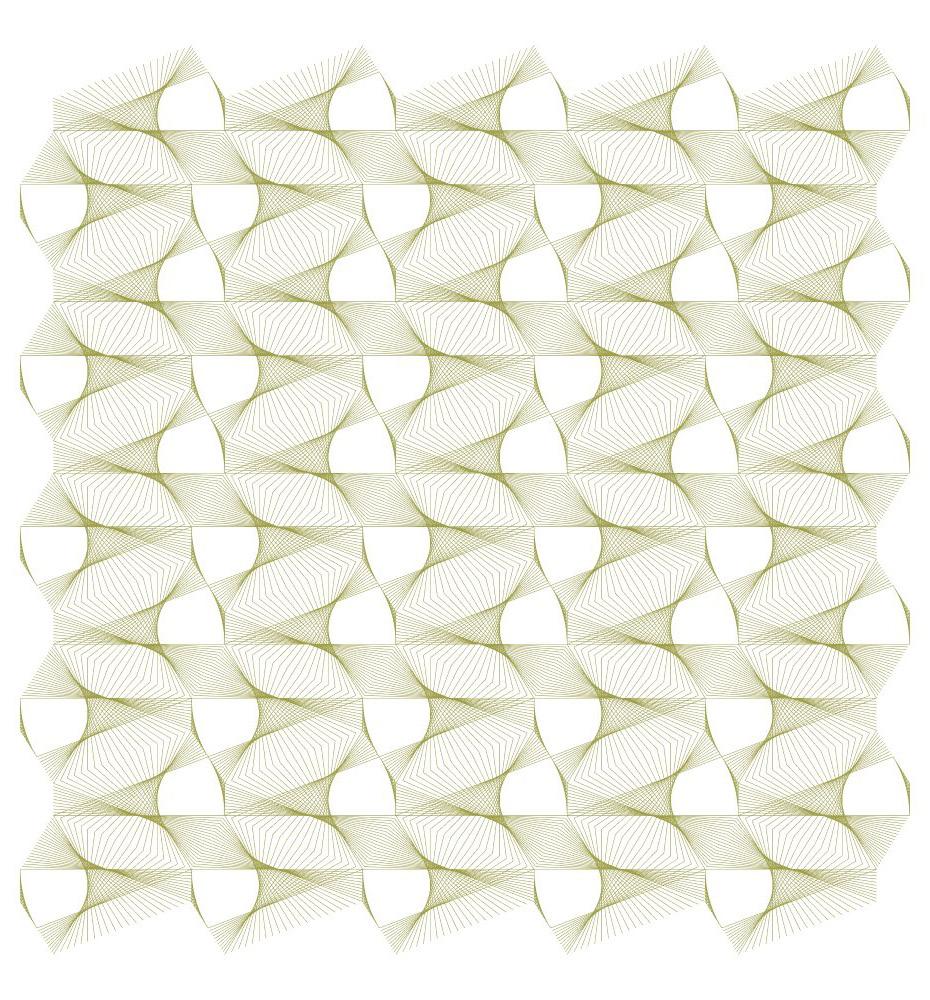
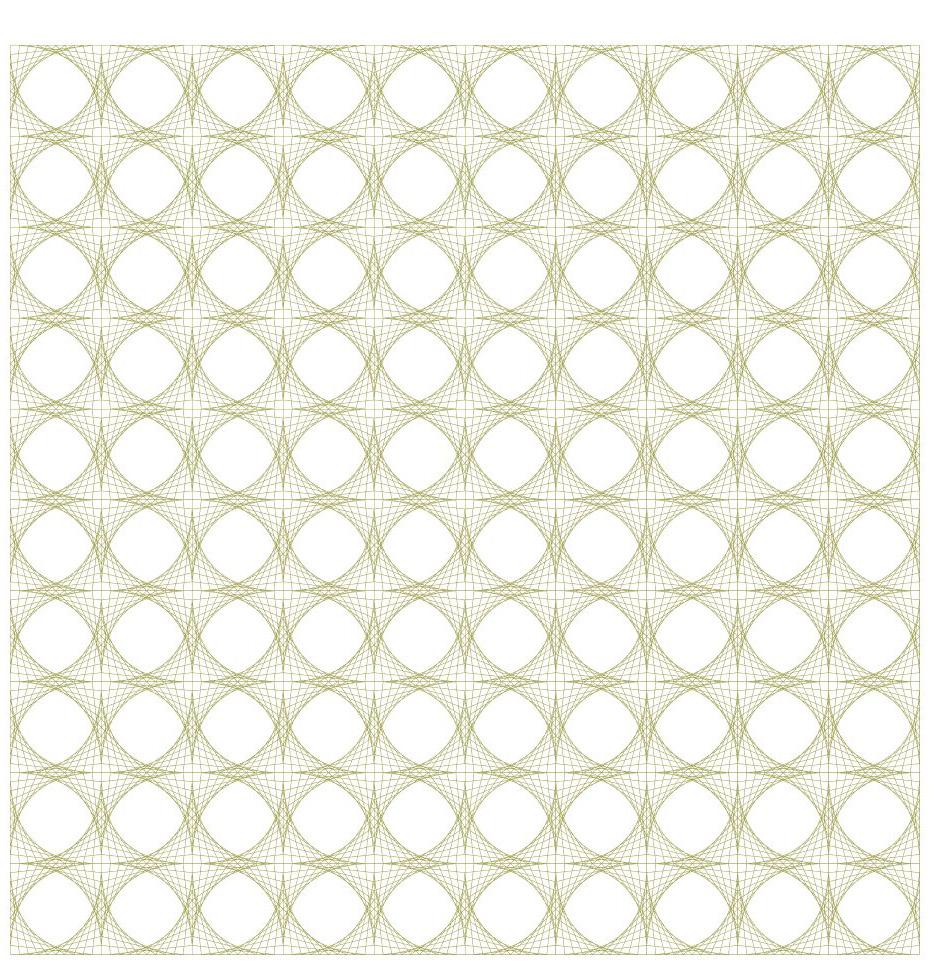
Honeycomb, a pattern generating grasshopper plugin, enables the creation of 2D and 3D patterns through symmetric transformations, each derived from the 17 wallpaper groups. Users can choose any of the wallpaper groups to create tilings based on Voronoi Domains and custom topological interlocking blocks. The plugin consists of ten components, which work together to generate, manipulate and array the smallest unit of a repeating symmetrical pattern, named fundamental domains. Simply by
changing a few parameters in the below script, all six tilings shown above can be created. Each symmetry group has an infinite amount of fundamental domains, so the number of patterns that can be quickly created is quite large. Historically, Dutch Graphic Artist M. C. Escher employed the use of the pg wallpaper group. Honeycomb enables users to make generate similar imagery. Users also have the option to draw their own geometry and repeat it via the logic of the wallpaper group. Whether it is an interlocking geometry (created via one of the Make Interlocking Block components) or a geometry created within Rhino-space, the grasshopper tool quickly allows for a repeating transformation.
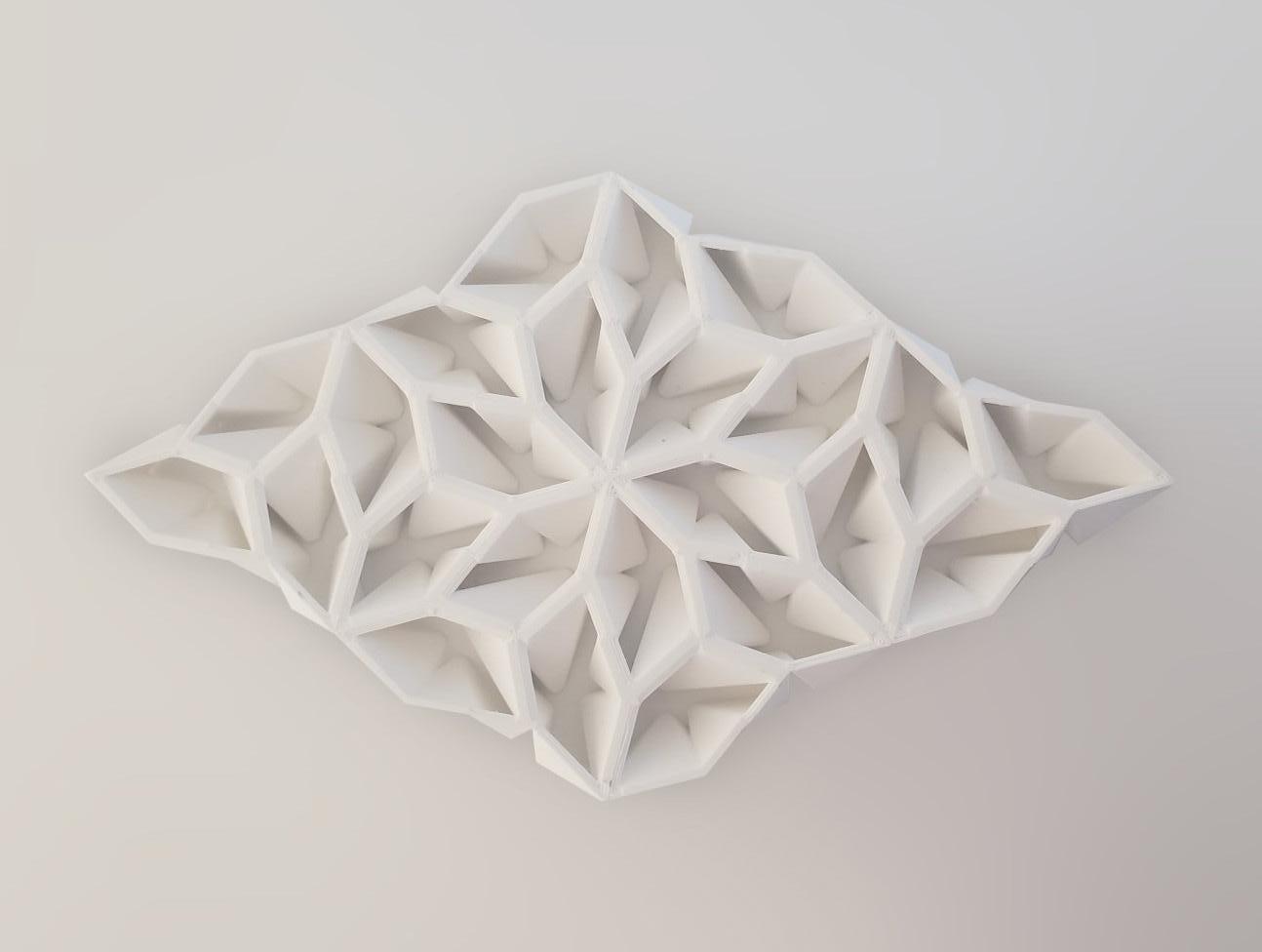
The software has potentials to move into the physical space and become 3D. 3D printed geometry is quick to output with a few additional commands to make a printable solid.
Sprawl & Resilience, Bachelor Thesis
When: Where: What:
With:
Role:
2022
Carnegie Mellon University, M.U.D. Thesis Studio
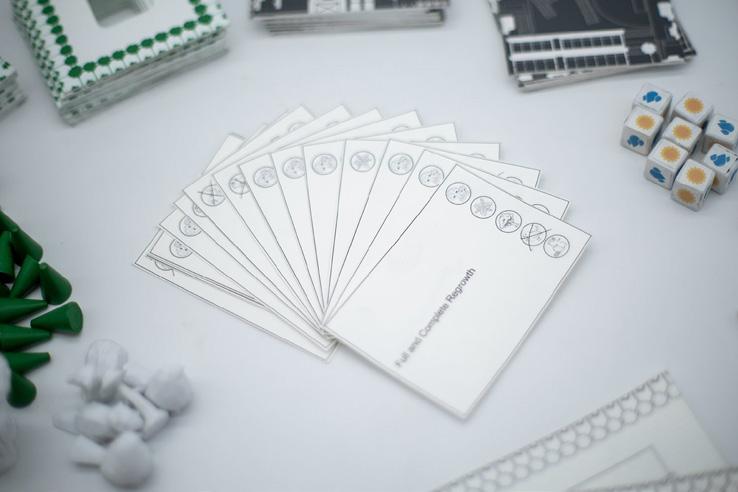
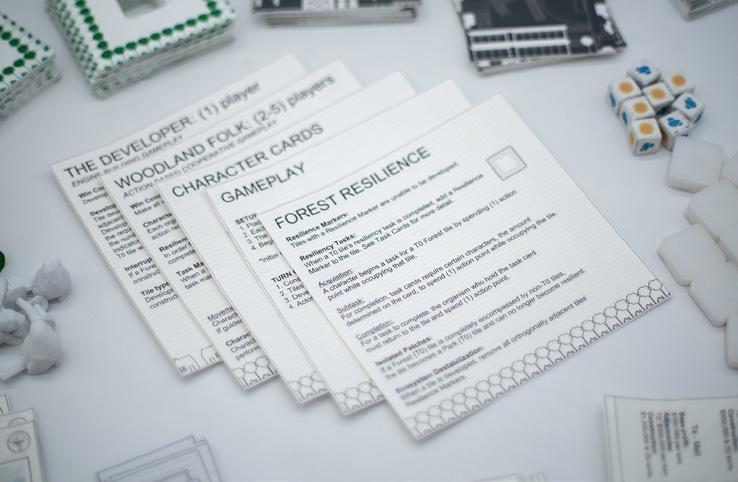
Deliberate design and custom fabrication of a table-top, asymetrical board game
Supervised by Johnathan Kline and Stefan Gruber
Individual work; responsible for the entire project
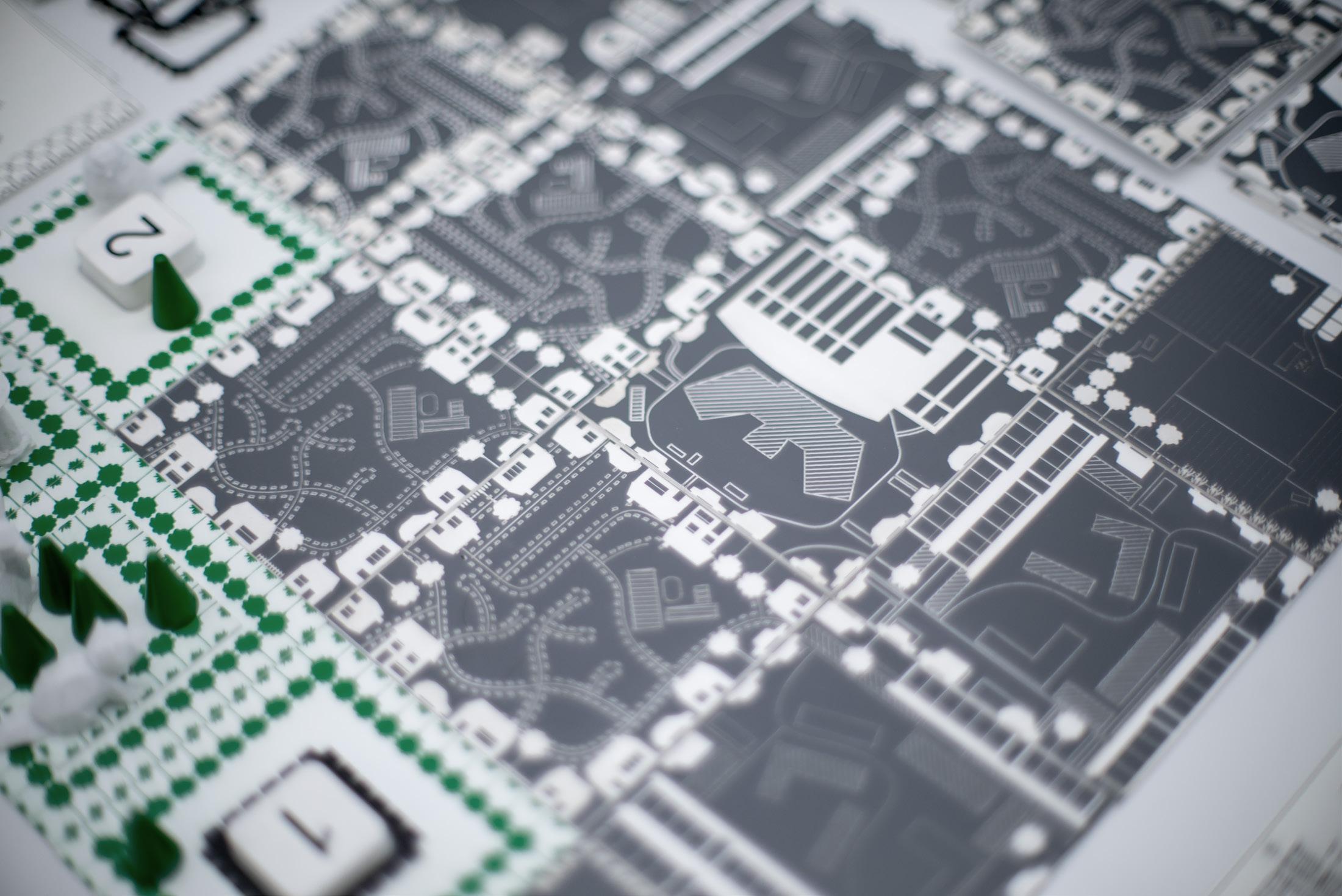
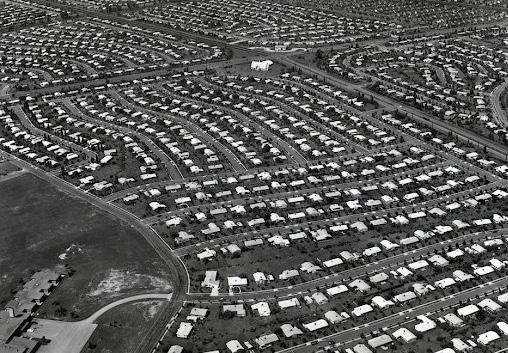
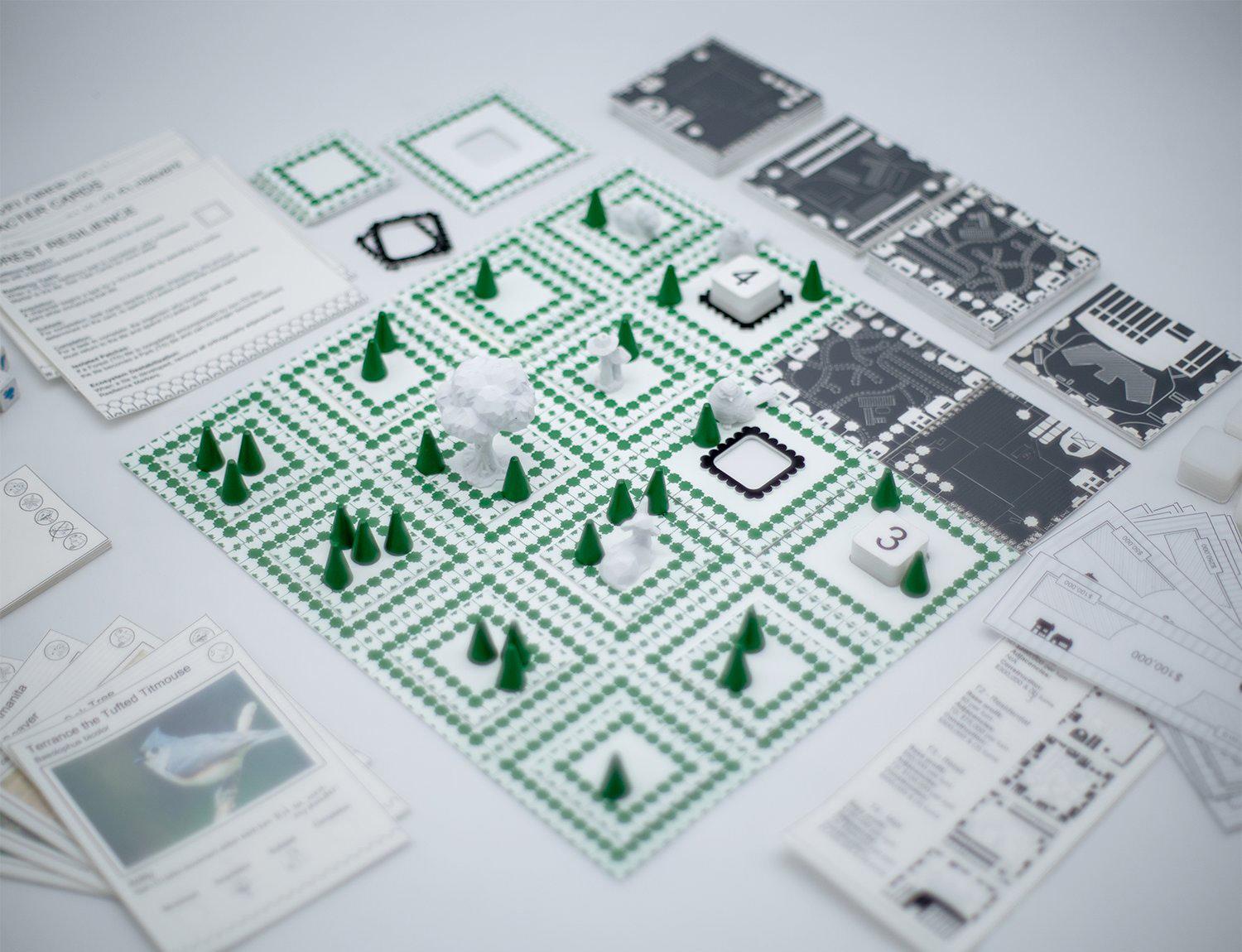
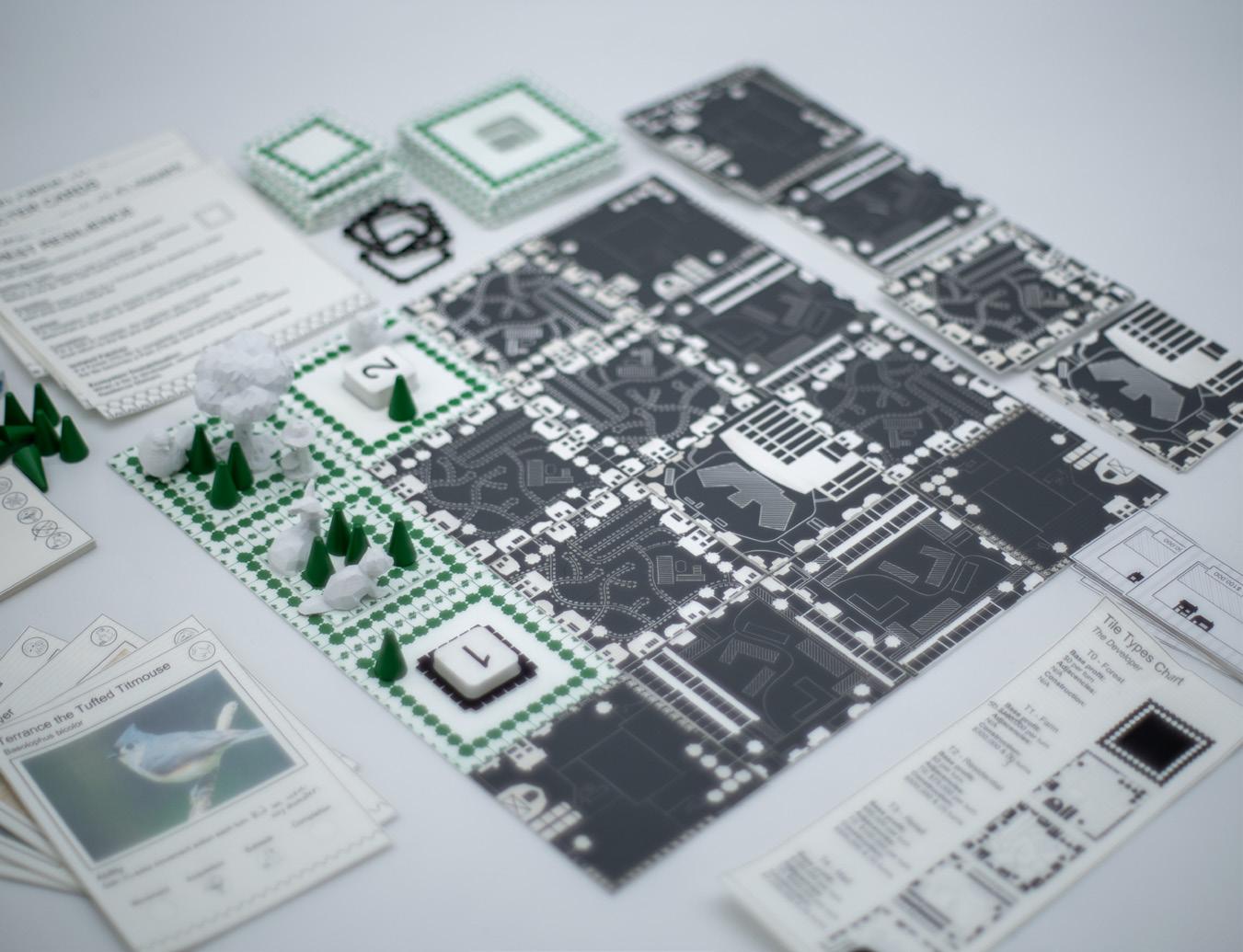
The protagonists of the game are the Woodland Creatures of the natural world. In light of their habitat destruction, they must face evil and work together in order to come out alive. The thesis’s villain is the Developer: a wealthy individual in the suburbs that represents and embodies the issues of suburbia. The Developer and the Woodland Creatures struggle for territory on the board, and power dynamics and imbalances between the two parties arise.
The mechanics of the game give far more power to the Developer than to the Woodland Creatures. It is intended that as players sit around a table together, a social dynamic arises where the few (the Developer) have the majority of the power in changing the board state and the many (the Woodland Creatures) must rapidly adapt their actions to combat impending decisions and strategies.
The actions and relationships between players constructs a tension between the Developer and the Woodland Residents. The constructed dynamic that arises from one player with lots of power vs many with not small amounts becomes contradictory to the
physical presence the players have when seated when around the table. This designed experience highlights the inequalities that arise from classes, power struggles, and erasure. The Woodland Creatures are influenced to share common resources to combat the imbalances they face from the other side of the board.
Wax Flamingos
When: Where: What:
With:
Role:
2024
University of Stuttgart, Behavioral Fabrication
Creation of a robotics behavioral loop addressing an indeterminate material & a robot’s response
In collaboration with Samuel Slezak and Otto Lindstam
Designed the behavioral loop and robot programming; central to concept development
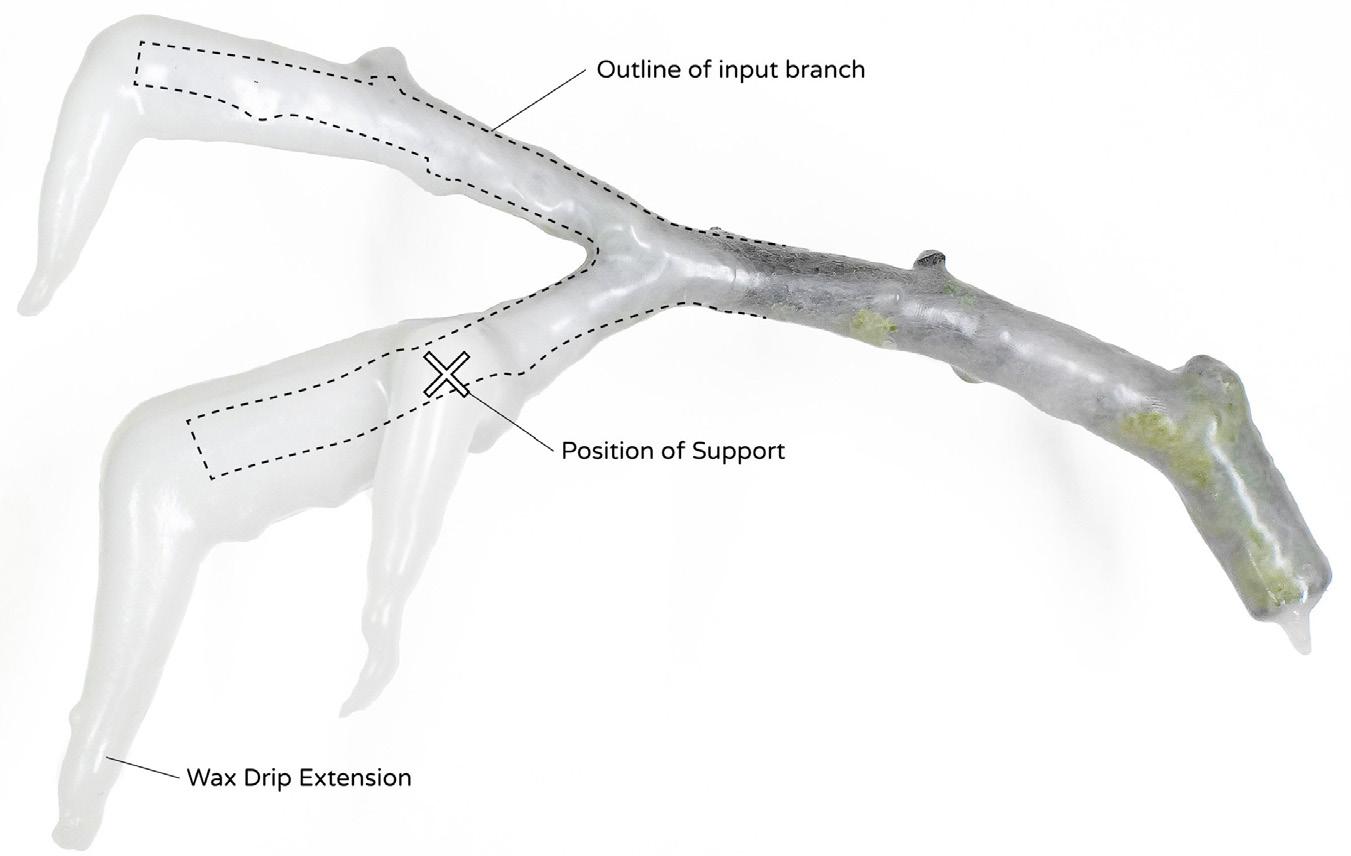
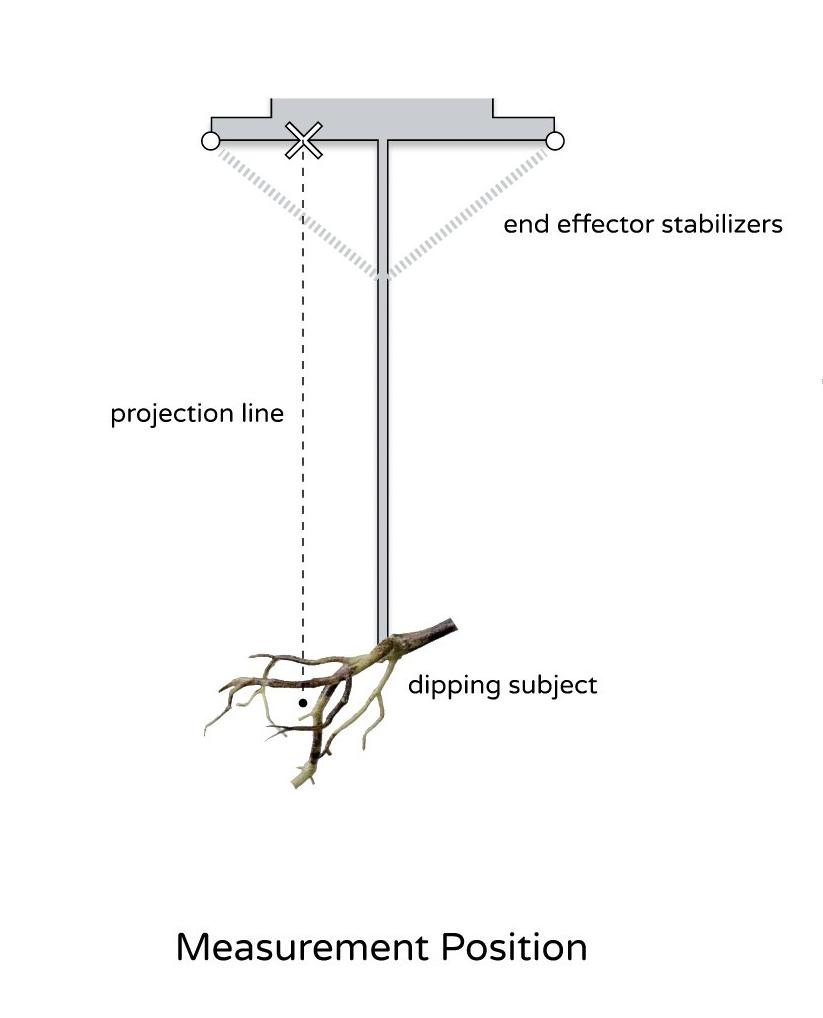
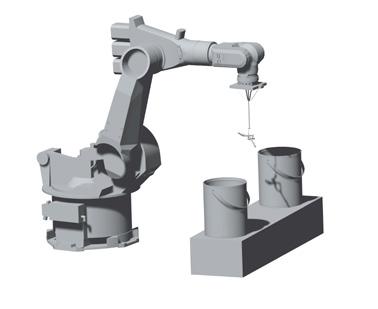
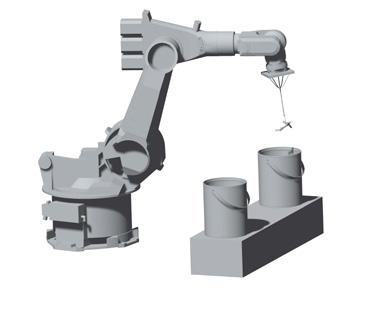
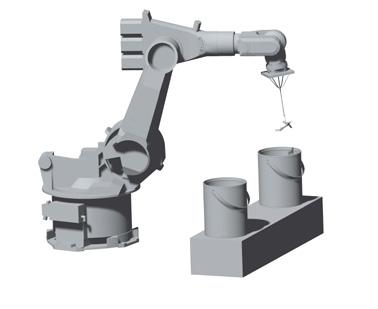
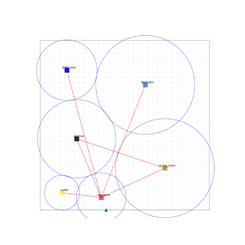
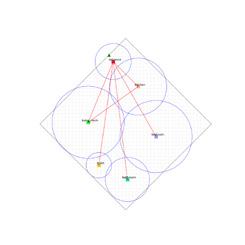
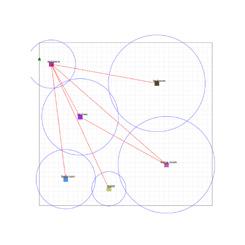
Drawing from the craft of candlemaking, this project employed the use of a dipping setup, complete with a hot wax bucket and a cool water bucket. The addition of a measurement location meant that data of the wax could be measured once the wax was mostly hardened, influencing the next dip. The objective was to robotically add wax to a found-object with the aim of positioning the object’s center of mass above the support. This required precise deposition of the wax, a challenge that was better suited for the accuracy of an industrial robotic arm. The behavioral loop consists of these parts.
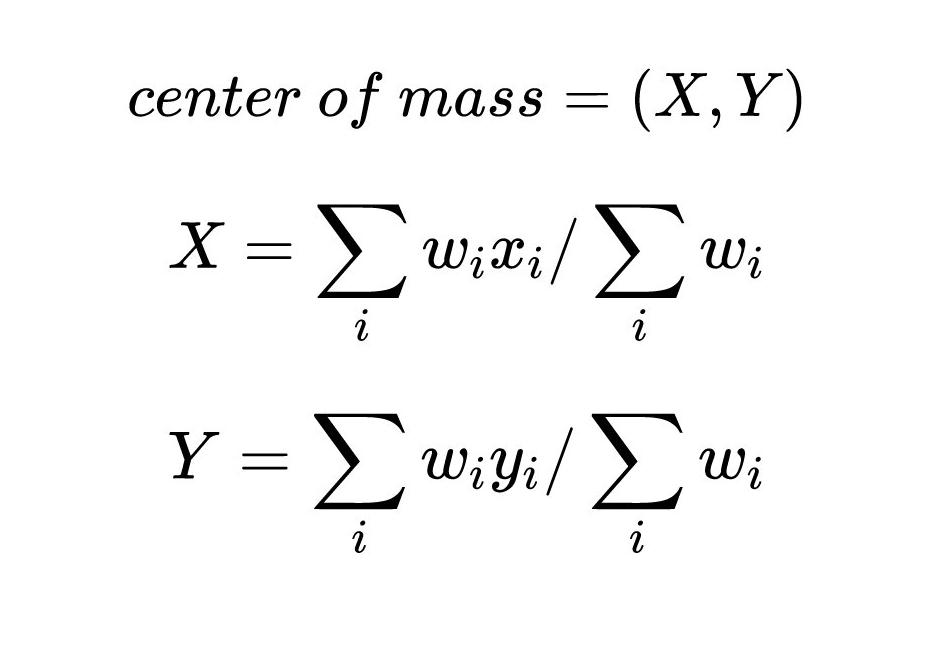
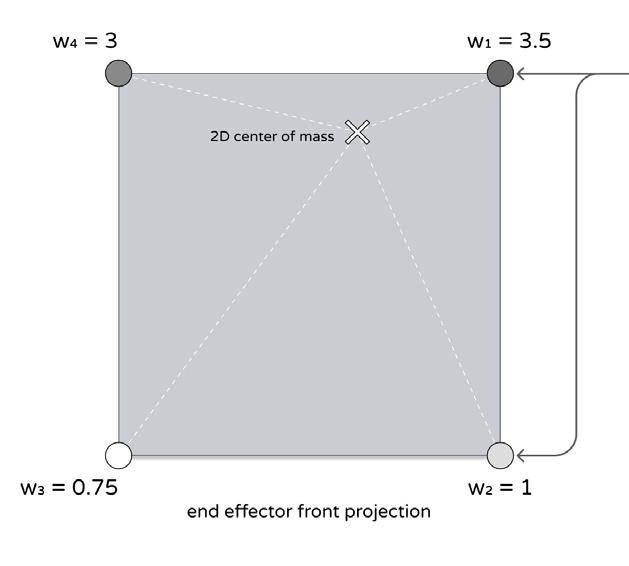
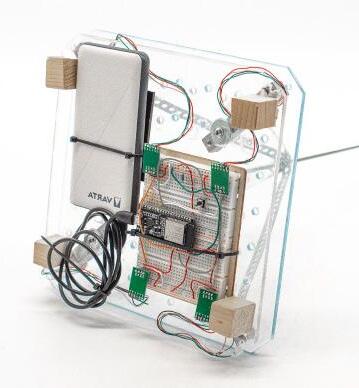
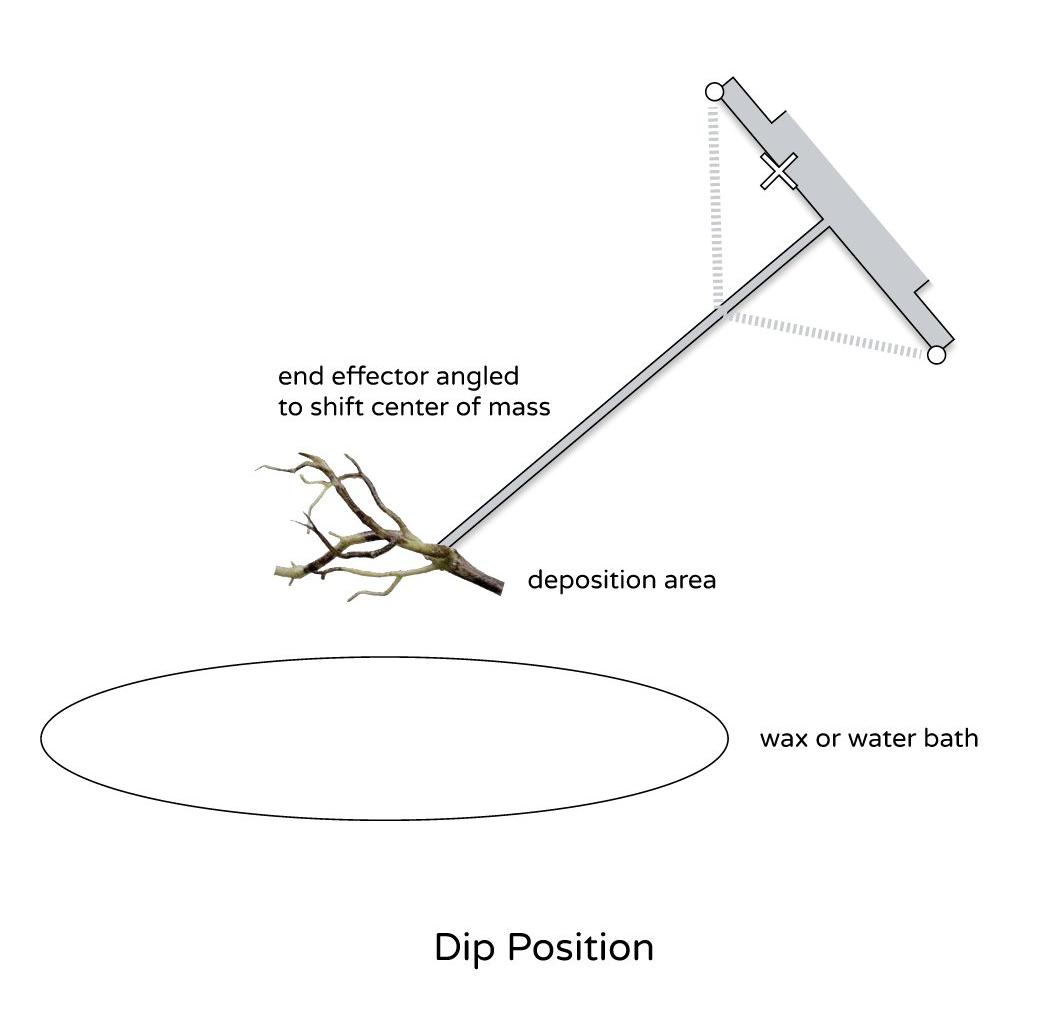
To ensure the proper placement of wax, the center of mass is measured before each dip, making use of a custom end effector and four pressure sensors. Center of mass calculation is quite simple, since the nail support is a vertical line, the center of mass is projected to a 2D plane, simplifying to a weighted sum equation. Once the center of mass is found, the robot arm receives a next orientation, determined by the difference between of the current center of mass and the target center of mass. The robotic arm prepares for the next movement by rotating and angling the end effector to achieve the desired positioning.
Next, the robot dips the found-object in the wax, allows the wax to sag for a moment, then submerges it in the water to cool the object, then measures the center of mass once again.
This process repeats until the object’s center of mass is near enough to the target, determined by the user. The process results in numerous stalactites forming from low points of the found-object which develop as the wax drippings begin to cool. Quite quickly, large amounts of wax accumulate at these stalactite nodes, shaping into the final object.
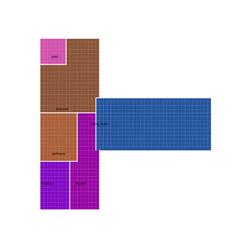
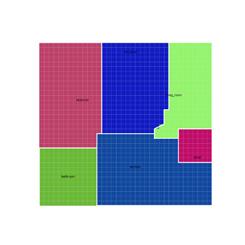
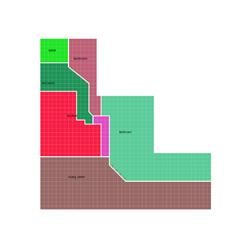
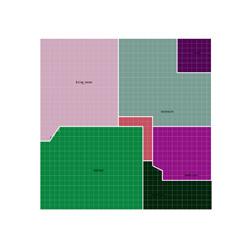
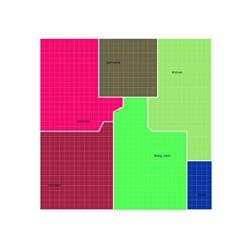
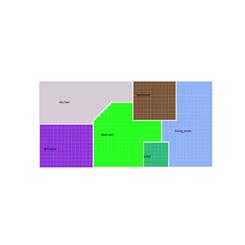
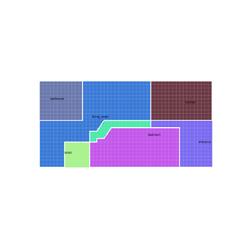
Semantic Floor Plans, Master Thesis
When: Where:
What:
With:
Role:
2024
University of Stuttgart, ITECH Thesis Studio
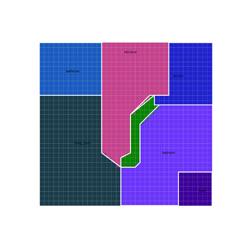
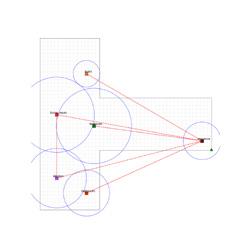
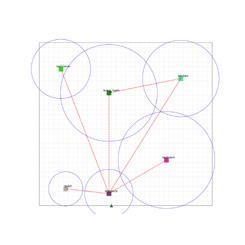
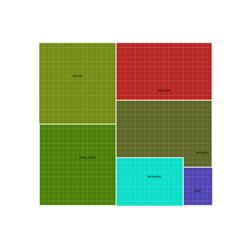
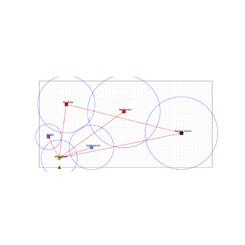
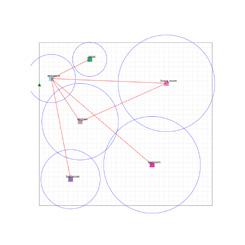
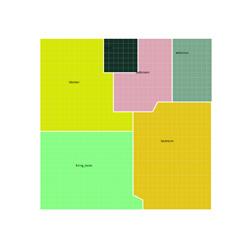
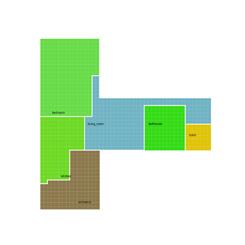
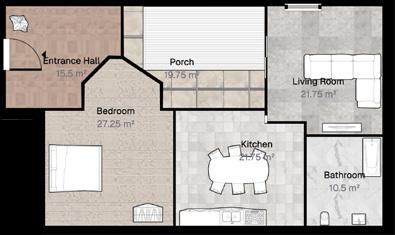
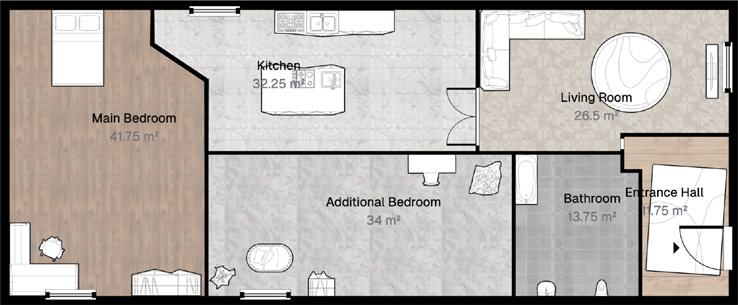
A Robust, Transparent, and Steerable AI Agent System for the Design of Floor Plans
In collaboration with Cornelius Carl and Arindam Katoch
Responsible for concept, application development, and documentation
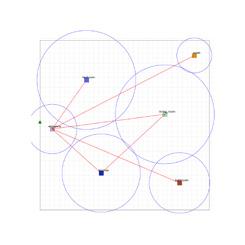
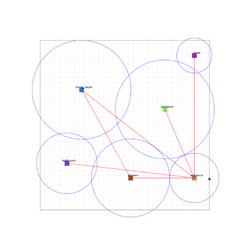
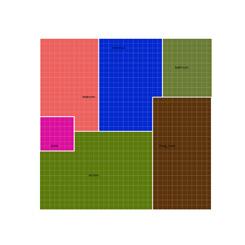
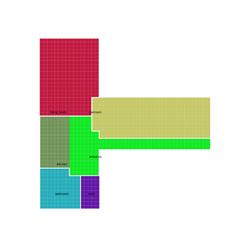
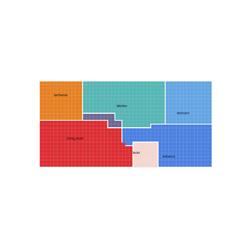
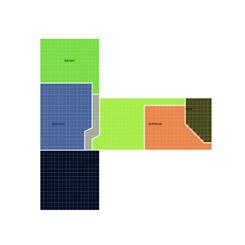
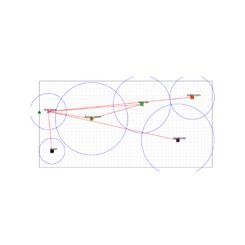
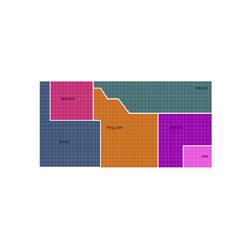
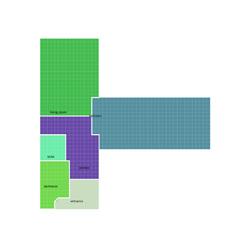
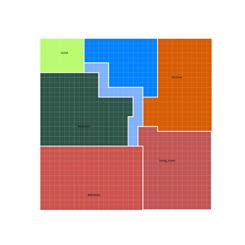
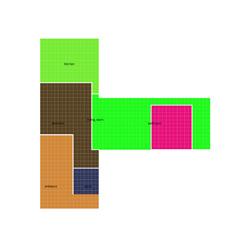
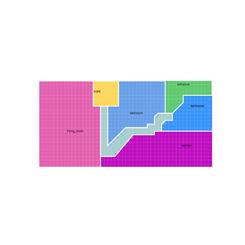
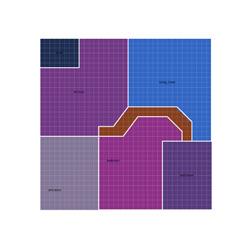
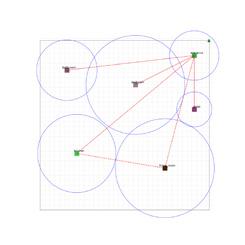
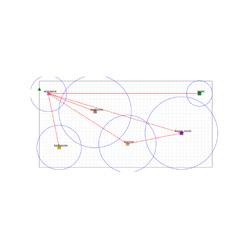
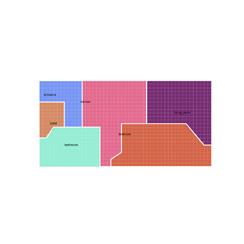
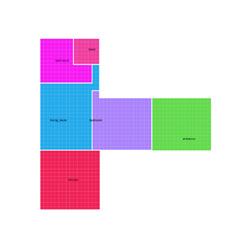
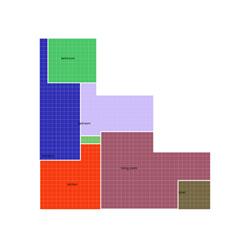
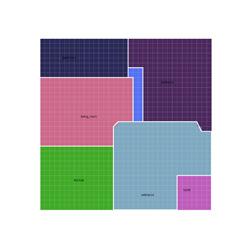
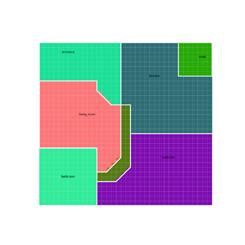
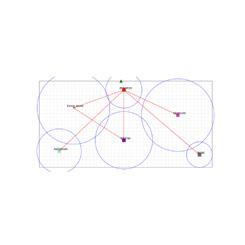
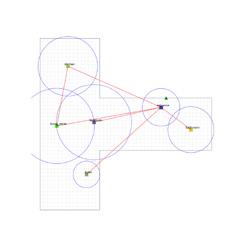
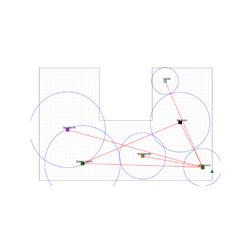
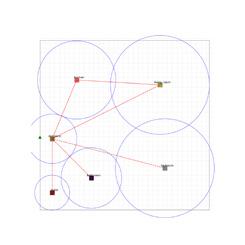
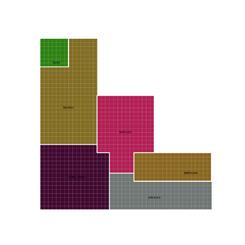
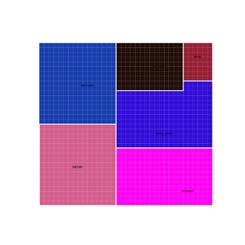
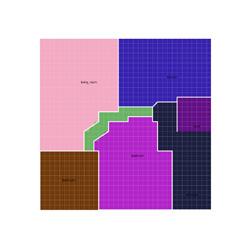
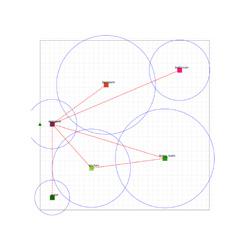
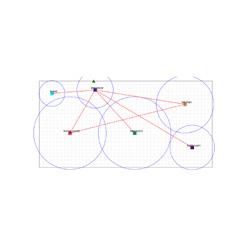
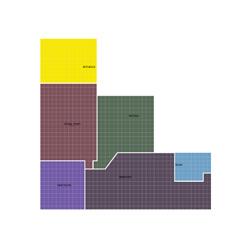
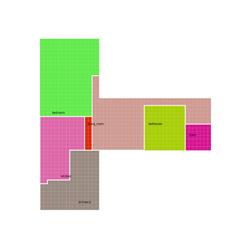
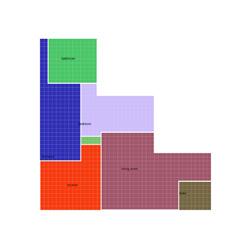
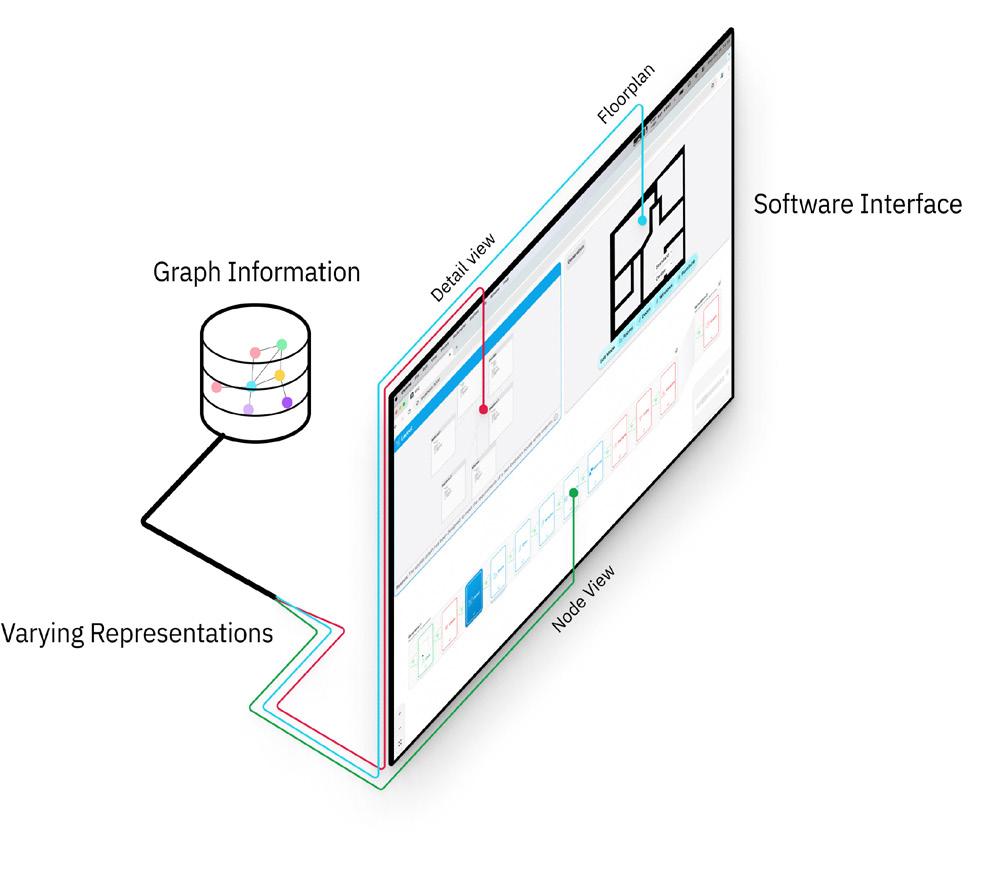
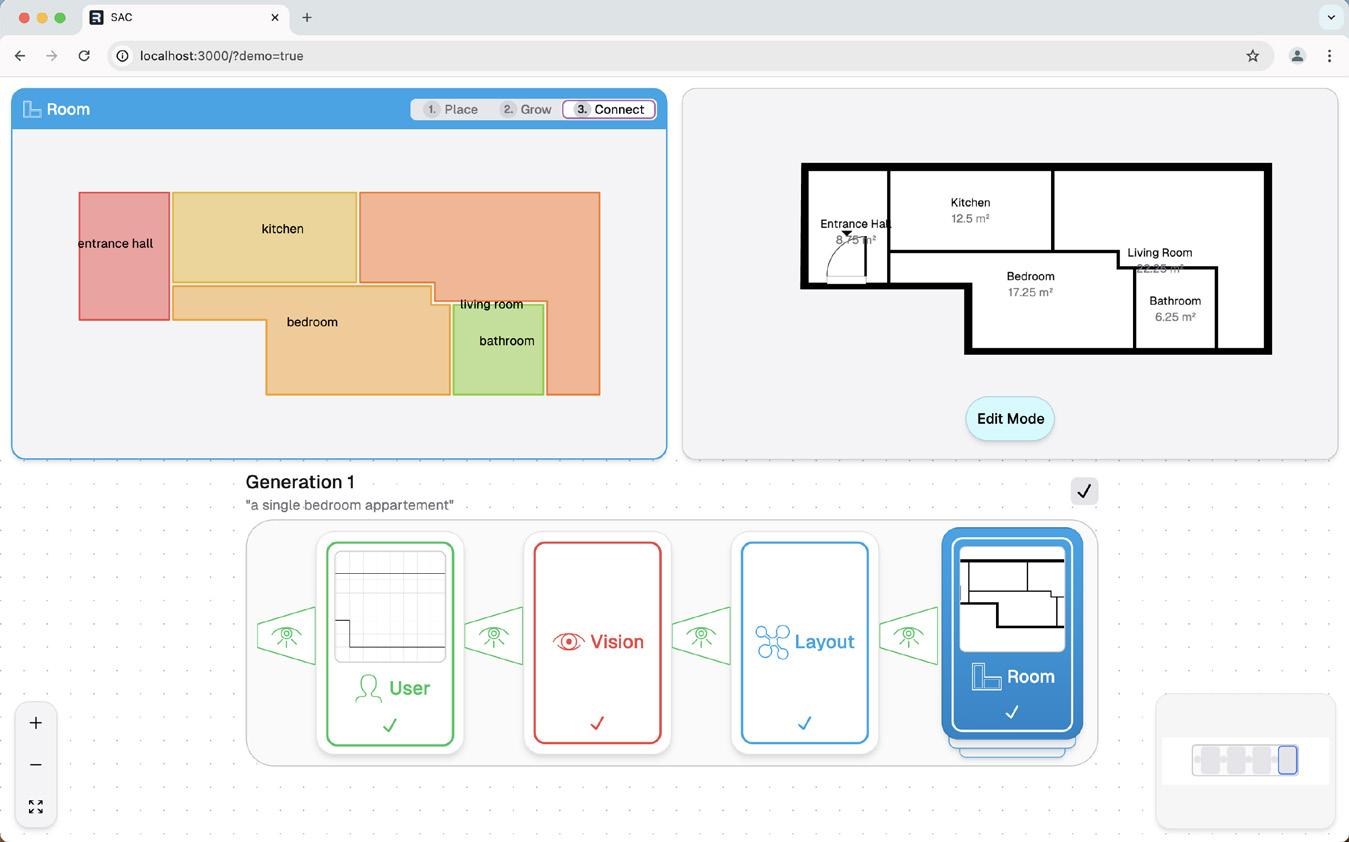
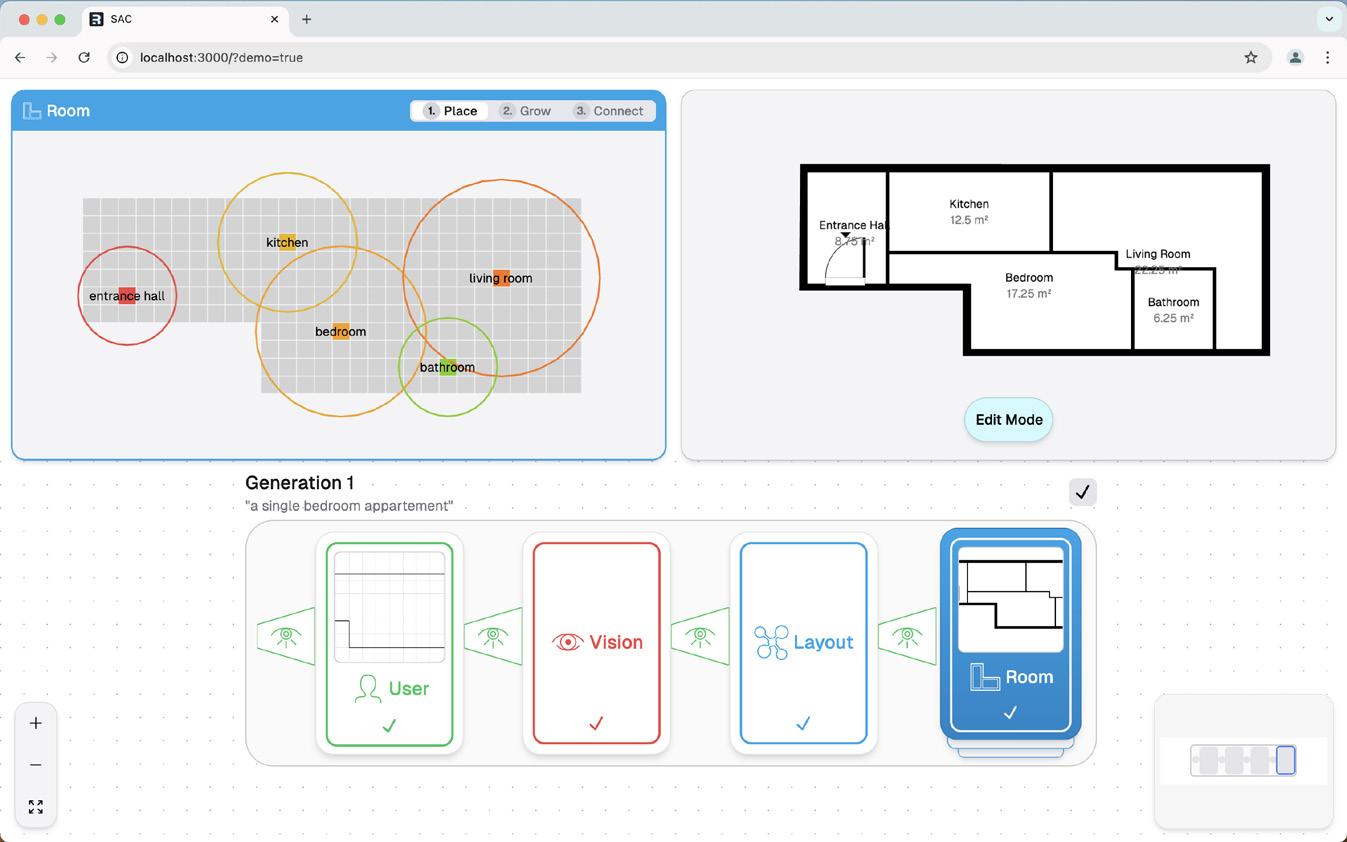
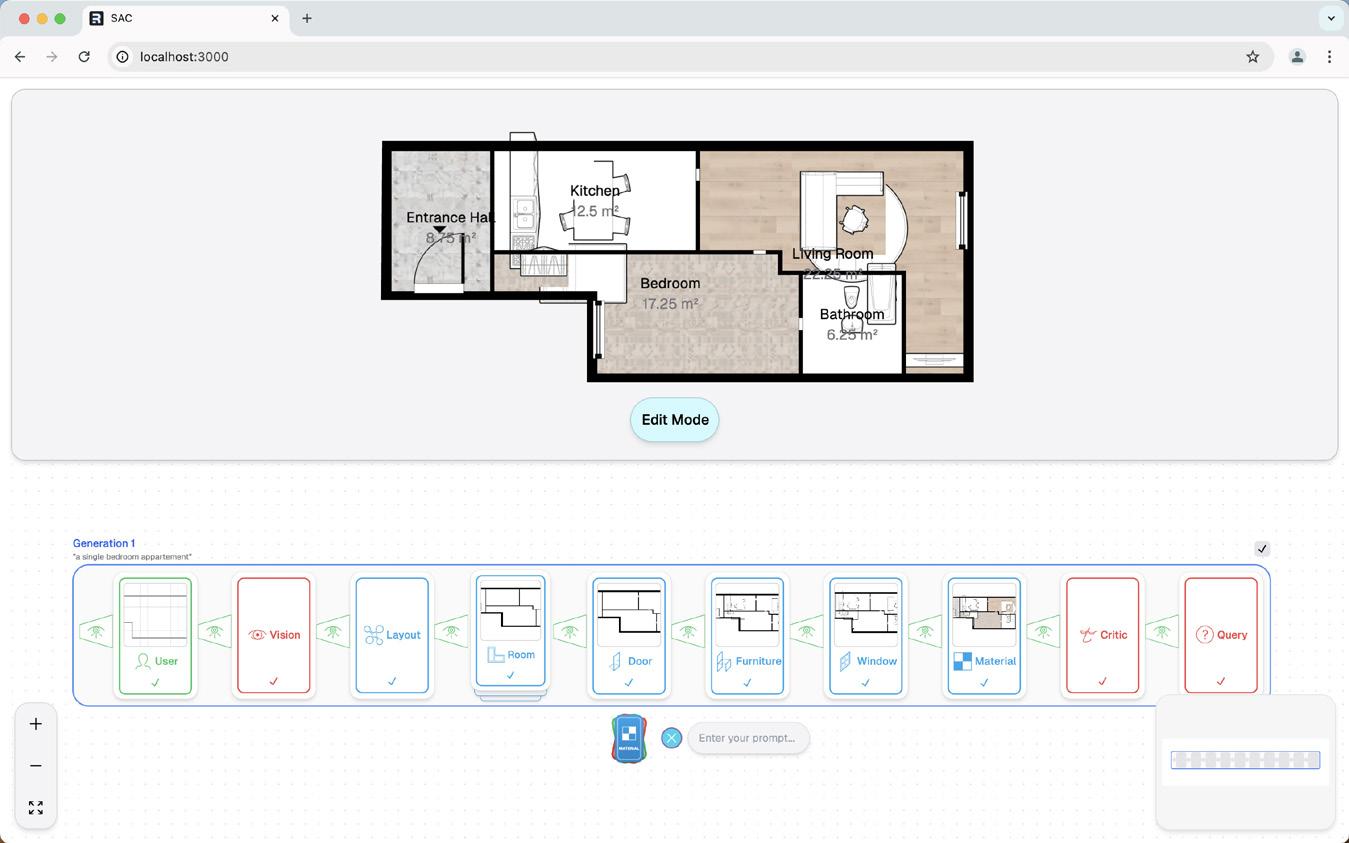
Harnessing technologies built upon the recent developments of artificial intelligence (AI), this thesis seeks to extend the potential of digital architectural tools through the usage of a large language model (LLM). Application of an LLM has the potential to accommodate fundamental changes to a geometric script through application of an AI agent system while giving the user more control over its generated content by making the AI’s decision-making process more transparent. It reveals an opportunity to reduce time spent on repetitive tasks and allow users to focus more on conceptual aspects of their work.
The goal of this thesis is to create a novel architectural tool that enables a designer to collaborate with generative AI by guiding its outputs rather than blindly relying on them. By tailoring an interface frontend to an LLM-based backend, this research develops a medium of interaction
between an architect-user and an AI agent system for softwarebased, early stage design process collaboration for the design of floor plans.
The software grants each actor the ability to play to their unique strengths: architect as decision-maker and AI as content generator. This ensures a robust quality of output, reveals transparent AI reasoning, and gives the user flexibility aimed to steer the AI without strictly defining the AI’s content generation. The design and creation of this software broadens the potentials of generative AI use in architecture, presenting an application that balances two critical aspects of the architectural design process: precision and creativity.