Minden jog fenntartva MERCOGIT Kft. 2023 partner@robee.hu + 36 206 61 51 71



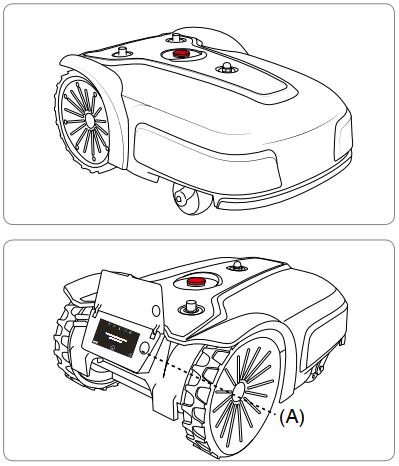
STOP GOMB

Nyomja meg a robot
biztonságos
leállításához*
* Az ilyen vezérlés helyzete a robot mechanikai alakjától függ.
Be / Ki gomb (A)
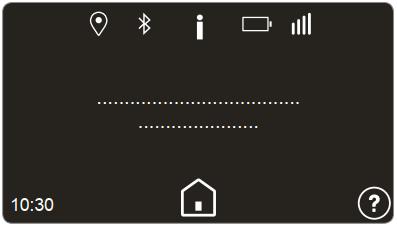
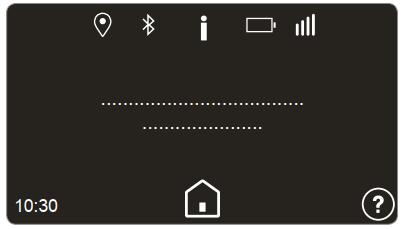
 Robot kijelző
Robot kijelző
Stop gomb
Nyomja meg a robot
biztonságos
leállításához
* Az ilyen vezérlés helyzete a robot
mechanikai alakjától
függ.
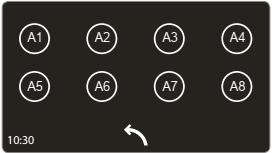
Robot billentyűzet
AUTO: lehetővé teszi az AUTO
üzemmód letiltását. Ha ki van kapcsolva, a robot csak a START/PAUSE
gomb megnyomásával fog működni.
Befejezi a munkát, ha az akkumulátor

lemerül, vagy ha elérte a maximális napi
vagy ciklusidőt, vagy ha esőt észlel (ha az esőérzékelő be van kapcsolva).
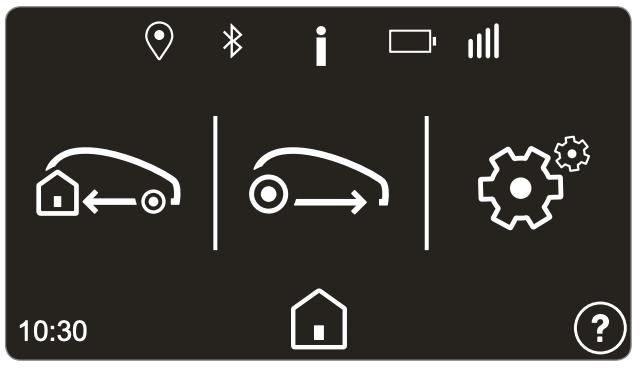
GPS állapot
Bluetooth állapot
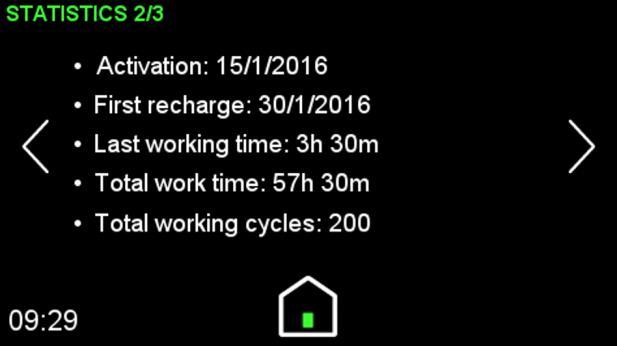
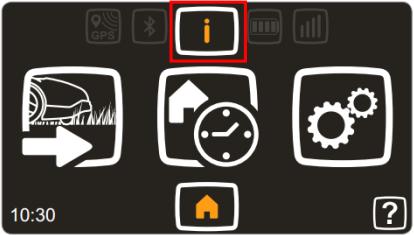
Robot info
(sorozat, munkaidő stb...)
GSM jel
Robot állapotok
(Működés, töltés, szegélyezés, nincs jel, hiba stb...)
Az akkumulátor szintje
Munkavégzés
MUNKA / TÖLTÉSI ÁLLAPOT
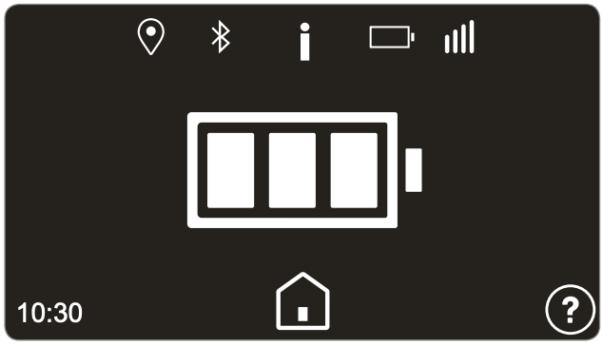
A robot a felhasználói menüben beállított paraméterek szerint működik.
A robot a dokkolóállomáson belül van, vagy külső töltőkábelhez csatlakoztatva, kikapcsolt állapotban. A robot csak az akkumulátort tölti
A kijelző elrendezése a robot állapota alapján változik. A felhasználónak meg kell nyomnia egy indítógombot, hogy kilépjen ebből az állapotból.
• 1 perc elteltével a kijelző kikapcsol, az információk újbóli megjelenítéséhez meg kell nyomnia a kijelzőt.

• 5 perc elteltével a robot kikapcsol, ha a dokkolóállomáson kívül a kijelzőn a felhasználói menü jelenik meg, vagy a robot állapota hibás.
Robot állapotok (Működés, töltés, határvágás, nincs jel, hiba stb...)
Dátum és idő
Az akkumulátor szintje
Robot parancsok
Ügyfél neve, robotmodell és firmware verzió

GPS állapot
AM4000: Elérhető a BLUETOOTH kapcsolaton keresztül
GSM jel

Állam Leírás
Nincs jelen A GPS modul nem kommunikál az alaplappal
Kereszt A connect nem tud állandó kapcsolatot létesíteni a műholdakkal. Az
alaplap és a GPS-modul közötti kommunikáció megfelelően létrejött.
Szürke A GPS-pozíció hibája túl nagy
ON (mint a képen) A GPS-pozíció megfelelő érzékelése
Nincs jelen A GSM-modul nem kommunikál az alaplappal
Szürke A GSM-jel nincs jelen. Az alaplap és a GSM-modul közötti
kommunikáció megfelelően létrejött.
ON fix (mint a képen) A GSM-jel jelen van. A sávok a jel teljesítményét mutatják
ON villogó A connect modul a felhőhöz csatlakozik az adatok megosztásához.
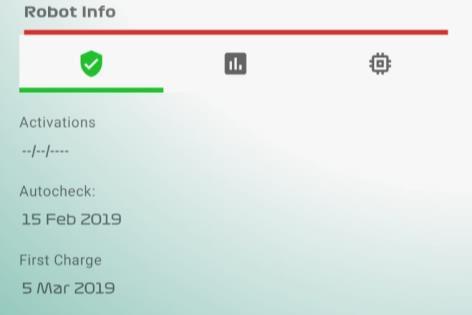

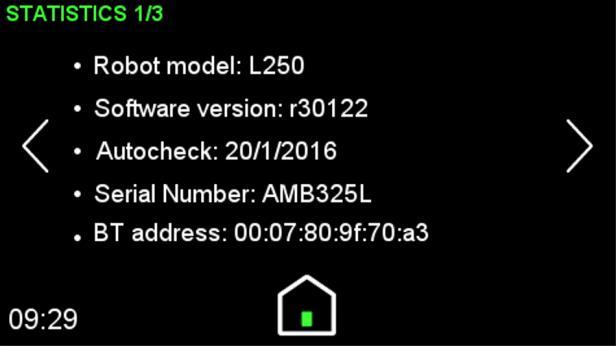
A robot adatai Robot működési statisztikák A roboteszközök
szoftverinformációja
AM4000: Az információk a távoli alkalmazásban is elérhetők a bluetooth kapcsolaton keresztül.
* FIGYELEM A következő diák a robot kijelzőjén megjelenő parancsok jelentését ismertetik.
Ugyanez a parancs a Remote alkalmazással is elküldhető a robotnak, például a kijelző nélküli robotoknál.
Részletes információkért olvassa el a robot felhasználói kézikönyvét.
A jelentés gyors bevitele a robot online súgójában is elérhető.



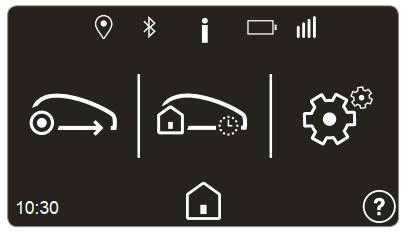
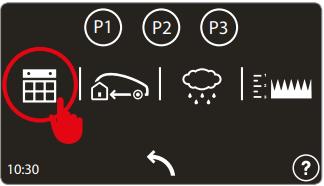
Kezdj el dolgozni
Keresés dokkolóállomás
A munka megkezdése egy bizonyos időpontig és dátumig
Töltés egy bizonyos időpontig és időpontig
Általános beállítás
Dokkolóállomás keresése és tartózkodás egy adott időpontig
Kezdj el dolgozni

Zárt terület


Munka egy bizonyos időpontig és dátumig
Távozzon egy adott területről egy napon belül


Kezdje spirállal
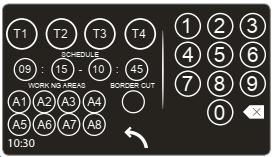

1. Minden napra 4 különböző munkaidőt állíthat be
2. Két ciklus nem fedheti egymást
3. Minden ciklushoz legalább egy területet be kell állítani.
4. Legalább egy ciklust be kell állítani
5. A beállításokat különböző napokon másolhatja
1. Kövesse a kézikönyv utasításait a munkaidő beállításához a nyírandó terület méretének megfelelően.
2. Növelje a munkaidőt a fű maximális növekedési időszakában.
3. Kerülje a robot indítását az öntözési ciklus vége felé.
4. Engedélyezze a megfelelő töltési időket, ha a munkaidőt felosztjuk.
5. Vegye figyelembe a szegélyvágáshoz szükséges időt (ha aktív).
6. Vegye figyelembe a terület eléréséhez szükséges időt.
AM4000
Lehetőség arra, hogy a robotot egy adott területen való munkavégzésre kényszerítsék, különösen kis területek esetén.
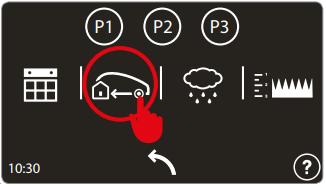

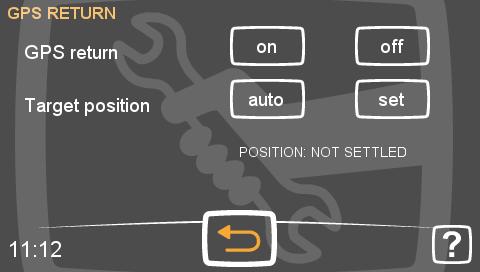
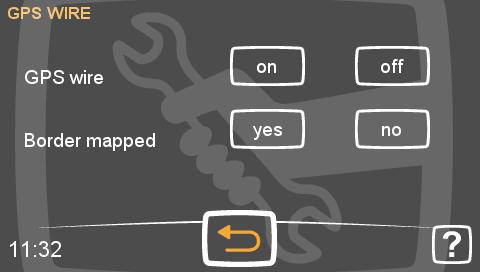
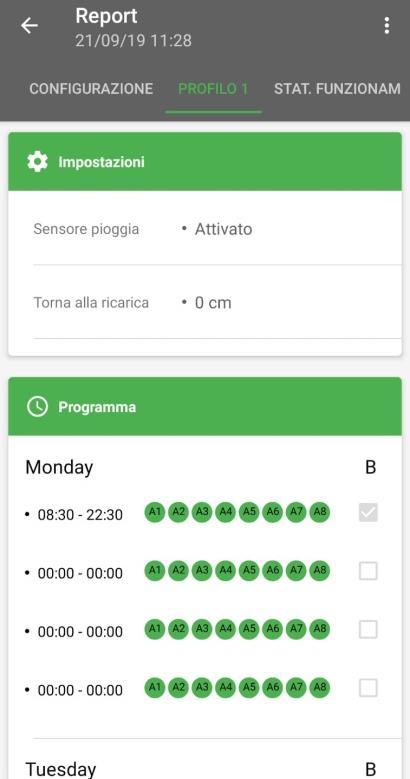
1. A dokkolóállomás keresési módszerének beállítása
2. 0 cm a vezetéken van
3. Ha 0 cm-nél nagyobb távolságot állít be, a robot minden alkalommal, amikor a dokkolóállomást keresi, változtatja a pozícióját (nem lépi túl a beállított távolságot).
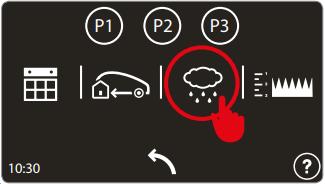
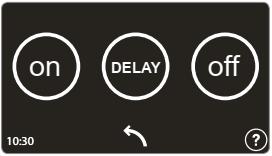
1. ON: a robot képes érzékelni az esőt. Az eső észlelése után a robot belép a dokkolóállomásra. A robot csak 1 órával az utolsó esőérzékelés után fog újra működni (még a dokkolóállomáson belül is).
2. OFF: a robot nem érzékeli az esőt
3. DELAY: az esőérzékelő be van kapcsolva. Beállíthat egy másik időt, hogy a robot az utolsó esőérzékelés után újra elkezdjen dolgozni. (több mint 1 óra)
A következő modellekben kapható:
• TREKKER S
• TREKKER XL S
• YARD (ellenőrizze a modell specifikációját)
• CLIMBER
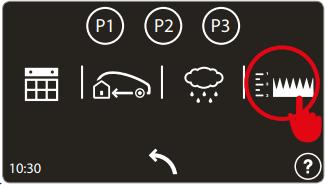
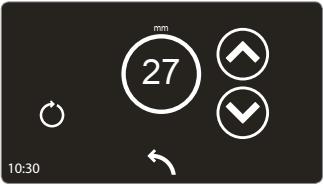
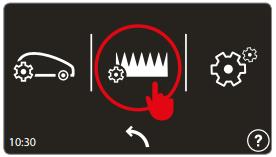
Lehetővé teszi a robot vágási magasságának beállítását.
A reset gombot akkor kell használni, ha a robotban kicserélte az alaplapot vagy a pengemotort.

1. Lehetőség van különböző munkaórák beállítására a következők alapján:
a) Maximális fűnövekedés: hosszabb munkaidő a forró
órák alatt
b) szárazabb/melegebb évszak: csökkentett munkaidő
és a hűvös órákra való összpontosítás
c) Gyakori esőzés: csökkentett munkaidő a forró órák
alatt
d) Szabad munkaidő (szabad kert)
e) Az öntözési idők változásai
2. A dokkoló állomásra való visszatérés változása
3. Ha lehetséges, változtassa meg a vágási magasságot

A modelltől függően 4-8 különböző területet állíthat be (lásd a műszaki részleteket). Minden egyes munkaterülethez beállítható:
1. Méret: a terület mérete. A robot kiszámítja az egyes területekre fordítandó idő százalékos arányát az összes terület teljes mérete alapján.
2. Távolság: a dokkolóállomástól a kiindulópont eléréséhez szükséges távolság, a területet átszelve.
3. Távolság a dróttól: a távolság a kerületi drótól, amelyet a robot folyamatosan elér a munkaterületre (a beállítások megegyeznek a dokkolóállomás keresési beállításaival).
4. Irány: az óramutató járásával megegyező vagy ellentétes irányban, a munkaterületen belüli kiindulási pont eléréséhez szükséges
legrövidebb út függvényében.
5. ECO MODE: a munkaterületen belül töltött idő csökkentésére szolgál. A robot az időt a pengemotor erőkifejtése alapján számítja ki.
FIGYELEM: ne használja széles felületeken.
1. Mivel a robot az idő százalékos arányát a teljes méretre számítja, a terület valós méreténél nagyobb méretet is beállíthat.
2. Javasoljuk, hogy a különböző területekhez ugyanazt a dimenziót adja meg, amennyiben az egyes területek valós mérete közel azonos.
3. Ha több területről van szó, jobb, ha a robot választja ki, hol akar több időt tölteni.
4. Nagy felületen történő telepítés esetén javasoljuk, hogy a lefedettség javítása érdekében a területen belül különböző kiindulási pontokat határozzon meg.
PÉLDA
1 - ÜTEMEZÉS BEÁLLÍTÁSA
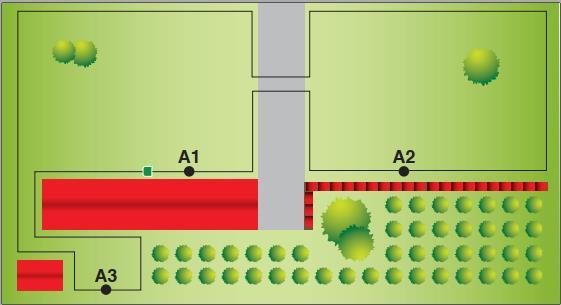
A területek mérete:
• A1 = 2000
• A2 = 2000
• A3 = 300
A területek mérete:
• A1 + A2 + A3 = 2000
• A4 = 300
• A5 = 500
ROBOT = L250 ELITE S+
Ebben a vizsgált esetben javasoljuk, hogy legalább 4 különböző kiindulási
pontot állítson be a dokkolóállomáshoz
képest különböző pozíciókban. Mivel a dokkolóállomás a határoló dróton kívül
helyezkedik el, az összes kiindulási
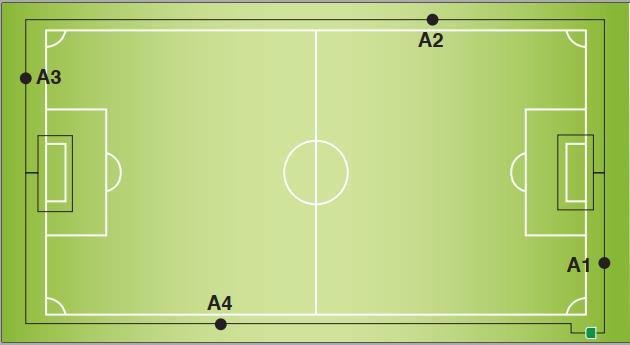
pontnak 0 m-nél nagyobb távolságot kell tartania. Az egyes kiindulási pontok területe
például azonos lesz: A1, A2, A3, A4 = 10000 négyzetméter
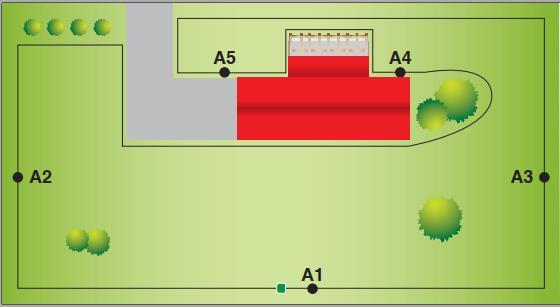
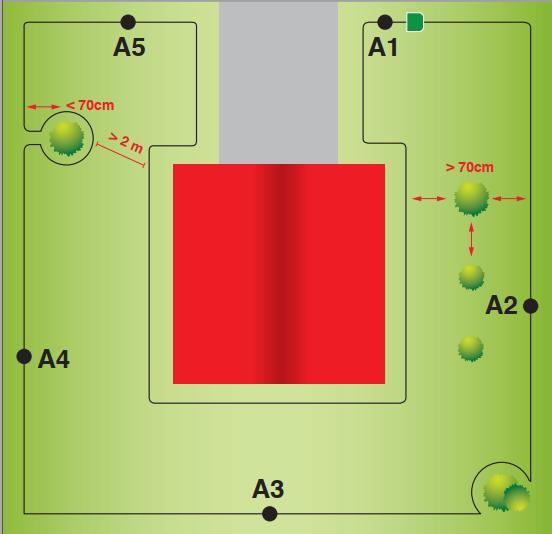
Mivel a kert alakja és az akadályok elhelyezkedése miatt nagyon kicsi a valószínűsége annak, hogy a telepítés minden zónáját automatikusan felfedezze, javasoljuk, hogy különböző kiindulási pontokat állítson be, hogy a robot a teljes felületet felfedezhesse.
A kiindulási pontok minimális száma 5. Az egyes kiindulási pontok területe nem lehet mindegyiknél ugyanaz. Például így
nézhet ki:
A2 , A3 , A4 = 1500 négyzetméter
A1 = 250 négyzetméter
A5 = 250 négyzetméter
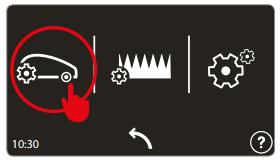
Ebben a szakaszban a robotfűnyíró általános beállításait állíthatja be: dátum, idő , nyelv. A legfontosabb részek a következők:
1. Dokkolóállomás beállításai:
a) Docking shift: lehetővé teszi a robot dokkolóállomáson belüli beállítását a robot bal vagy jobb oldalra történő áthelyezésével. A funkció akkor működik, ha a robot érzékeli a dokkolóállomásból a levegőjelzőt.
b) Bluetooth-érzékenység: lehetővé teszi, hogy beállítsa azt a pozíciót, ahol a robot érzékeli az AirMarkert a dokkolóállomásról.
2. GSM: az IoT-rendszerhez csatlakoztatott ügyfelek listája

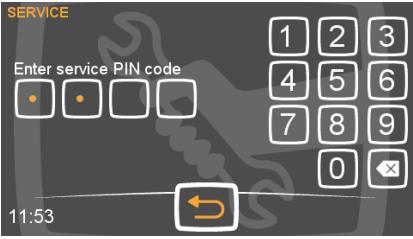
nyomja meg az "i" gombot néhány másodpercig
B
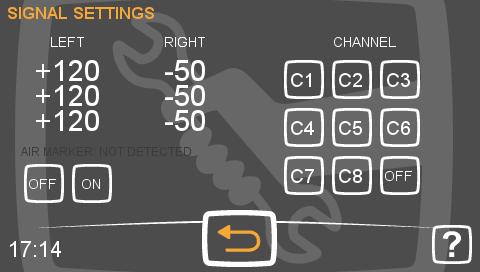
A - a jel teljesítménye. + a kerten belül; - a kerten kívül. A tekercsek száma modellenként eltérő.
B - csatorna beállítása. FIGYELEM: fontos használni a jelproblémák hibaelhárításakor és az egymást követő telepítések során.
C – Air marker felismerése és beállítása.
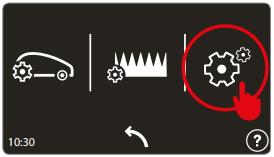
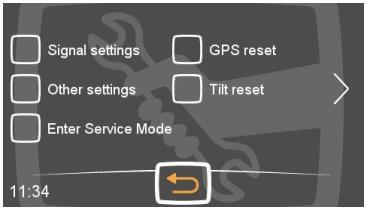
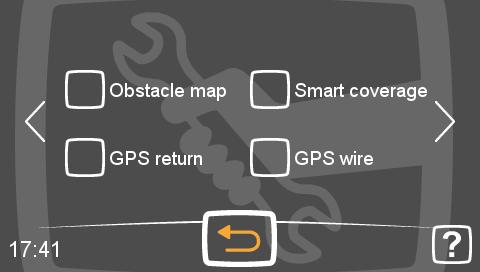
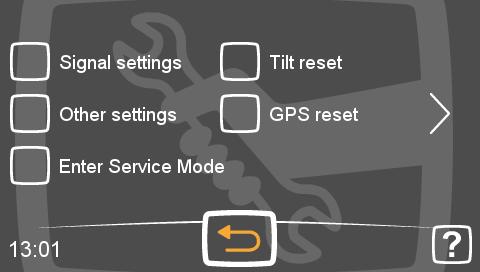
Lehetővé teszi a robot rejtett beállításainak
megváltoztatását, a speciális helyzetekhez való igazítását
vagy a robot hibáinak megoldását.
A részletekért tekintse meg az "AM4000 - Szervizmenü és speciális beállítások" című dokumentumot.
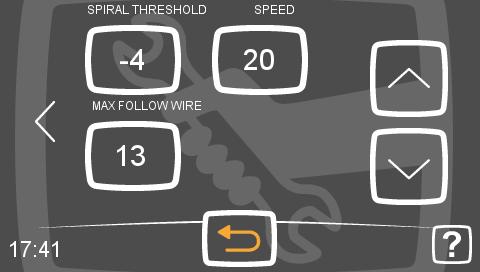
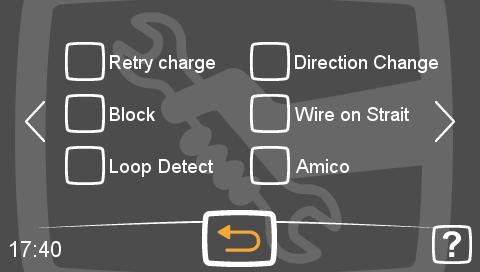
MAX FOLLOW WIRE: ez a legfontosabb funkció a telepítés szempontjából. Lehetővé teszi annak a távolságnak a beállítását, amelyet a robotnak a vezetékre történő visszahívás azonosítása után a vezetéken kell megtennie.


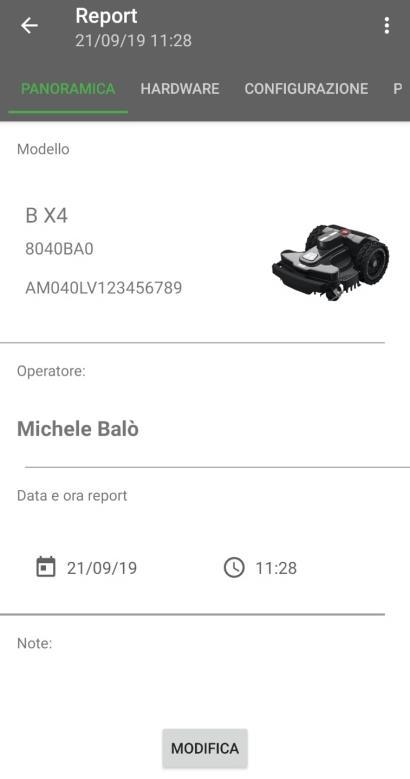
Lehetővé teszi a robotra vonatkozó teljes körű adatok ellenőrzését:
• Motorinformációk
• Az akkumulátor feszültsége
• A robot állapotán alapuló kisütési
áram / újratöltési áram
• Jelérzékelés
A funkció mindaddig engedélyezve marad, amíg a robotot ki nem kapcsolja, vagy magát a funkciót nem tiltja le a szolgáltatás menüből.
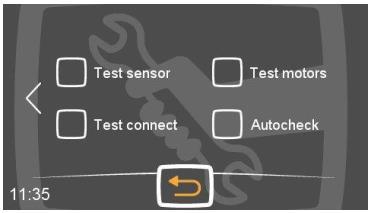
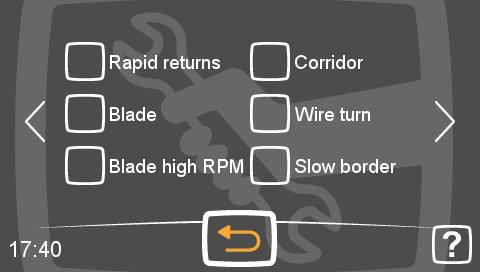
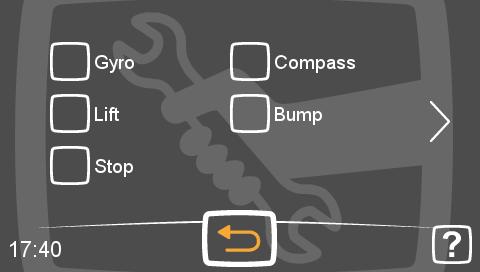
Lehetővé teszi, hogy ellenőrizze a robotban lévő egyes eszközök megfelelő működését:
A. Stop gomb
B. Airmarker észlelés

C. Esőérzékelő
D. Bump: az érzékelők száma és helyzete modellről modellre változik. Ügyeljen az alaplapi csatlakozásra
E. Emelőérzékelő
F. Jelérzékelés
G. Dőlésszög: ennek visszaállításához a robotot sík felületre kell helyezni, és a szervizmenüben meg kell nyomni a Tilt Reset gombot.

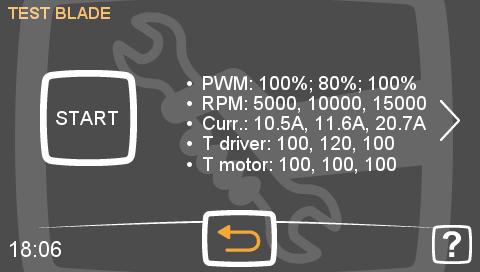
Penge teszt : lehetővé teszi a penge motor
megfelelő működésének ellenőrzését. A "Start" gomb megnyomása után a robot alapértelmezett
sebességgel futtatja a motort.
Motor teszt : lehetővé teszi a kerékmotor
megfelelő működésének ellenőrzését. A "fel" nyíl
(A) megnyomása után a motor előrefelé mozog, a "le" nyíl (B) megnyomásával a robot hátrafelé mozog. Egyszerre csak egy motort tud működtetni a C megnyomásával. Fontos: ellenőrizze a D gombot, hogy megértse, melyik a motor típusa
(D).
FIGYELEM: a teszt során, ha az egyik motorral probléma van, a robot megmutatja a hiba típusát.
1. Az összes csatlakoztatott robot listája (nincs korlátozás a hozzáadott robotok számában)
4. A robot állapotának felügyelete (konfigurált modul csatlakoztatása)
7.

A következő funkció használatához el kell végeznie a connect konfigurációt. A folyamat automatikusan elindul, amikor először párosítja a robotot és a connect modult (amelyet a gyártási fázisban kell a roboton megjeleníteni).


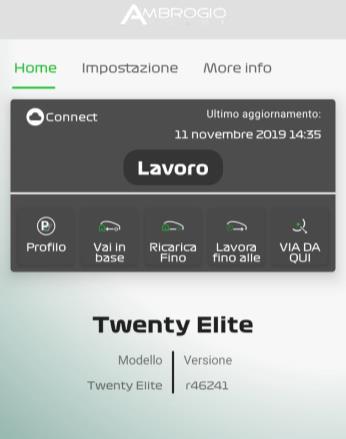
Figyelheti a robot állapotát és távvezérelheti azt. A parancsok a robot állapota alapján változnak
PROFIL: váltás az előre beállított profilok között
CHARGE UNTIL: feltöltés egy bizonyos időpontig. A robot megkeresi a dokkolóállomást, miközben "dolgozik".
WORK NOW: a robot az ütemezés beállításait követve kezdi meg a munkát. Eső vagy alacsony
akkumulátor töltöttség esetén, vagy ha az ütemezésen kívül dolgozik, a robot megpróbál belépni a dokkolóállomásra.
WORK UNTIL: a robot egy adott területen egy adott időn belül (a napon belül) elkezd dolgozni. Abban az esetben, ha a robot fut, akkor a dokkolóállomást keresi, hogy megtalálja a területet.
GO AWAY: a robot egy meghatározott, az alkalmazásból választható területre korlátozott ideig (egy
napon belül) nem lép be.
AZ ALKALMAZÁS NEM MUTATJA
A ROBOT HELYZETÉT
A lehetséges okot a GPS észlelésénél kell kezelni.
helyzetének a roboton történő
A ROBOT ÁLLAPOTA NEM FRISSÜL
A lehetséges ok a robot által a GSMhálózat
A ROBOT NEM FOGAD PARANCSOKAT
észlelésénél vagy az okostelefon hiányzó hálózatánál keresendő.
ELVESZTETTEM A KAPCSOLATOT TULAJDONSÁGOK A csatlakozási funkciók le vannak tiltva az alkalmazásban, vagy az ügyfél
nem tartozik hozzá a connect ügyféllistájához.
1. Figyelje és vezérelje a robotot az alkalmazásból, ugyanúgy, ahogyan a robot kijelzőjével is interakcióba lép. A kijelzővel nem rendelkező robotoknál a hibás működés okát akkor értheti meg, ha az ALERT led villog.
2. Konfigurálja a connect modult (a folyamat automatikusan elindul a robottal való első párosításkor).
3. A felhasználói menü beállításainak módosítása.
4. Vezesse a robotot
5. A robot szoftverének frissítése
6. A geofence funkció beállítása
Módosítsa a kör méretét.
A középső az okostelefon pozíciója (győződjön meg róla, hogy a GPS funkció engedélyezve van).
Állítsa be a földrajzi kerítést.
FIGYELEM: Ha már be van állítva, az alkalmazás erről egy üzenetben értesít.
Tiltsa le a Geofence funkciót.
Ha a robotot ellopták, ellenőrizheti az elmúlt hónapban közzétett pozíciókat.
FIGYELEM: ha a geofence engedélyezve van, a robot csak a PIN-kód megadásával kapcsolható ki. A kijelző
nélküli robotban az ALERT led villogni kezd, amíg a PIN-kódot nem adják meg a Remote alkalmazáson keresztül.

1. Jelentkezzen be a Gmail, Facebook vagy e-mail segítségével az adatok szinkronizálásához.
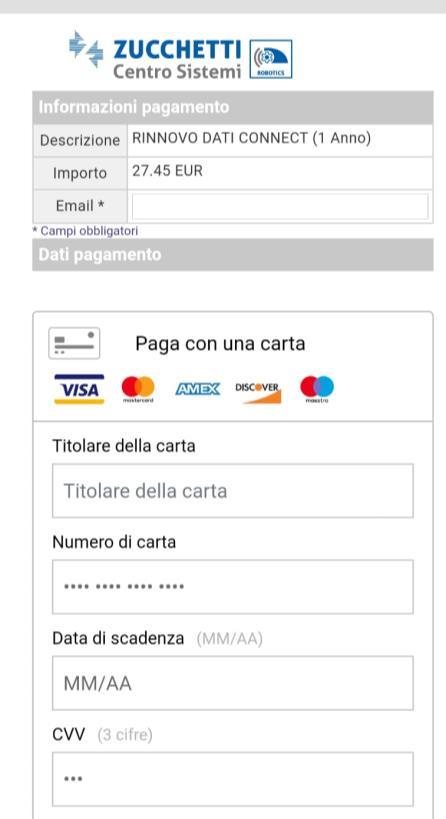
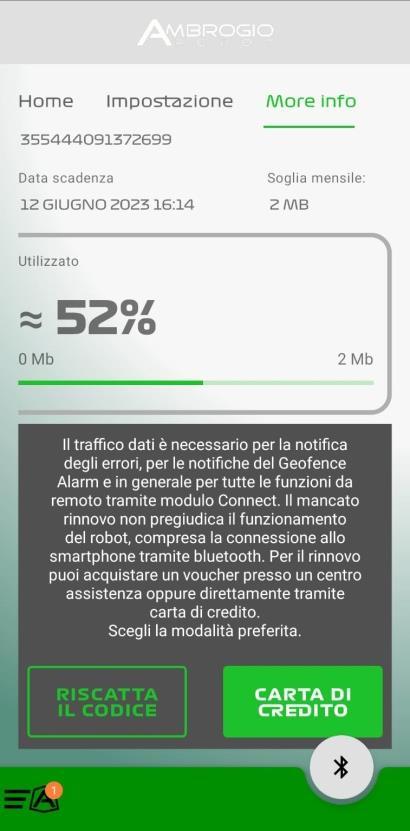
2. A connect modul adatcsomagjának megújítása (az első 2 év a telepítéstől számítva ingyenes). A megújítás történhet utalvánnyal vagy közvetlen bankkártyás fizetéssel.
3. Olvassa el az összes termék használati útmutatóját
4. Az Amico eszközök párosítása és kezelése
5. Csatlakozás a hangalapú asszisztensekhez (Alexa, Siri és Google Assistant)
6. A csatlakoztatott ügyfelek listája (legfeljebb 5 eszköz csatlakoztatható ugyanahhoz a robothoz)
7. Távoli jelentés az IoT-tevékenységekről
Az ügyfél beírja a kereskedőtől vásárolt utalványt.

Az ügyfél közvetlen kifizetést teljesít a ZCS részére
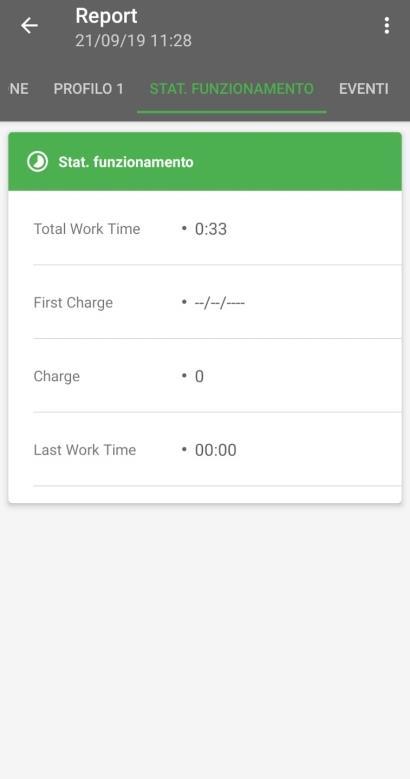
Az operatív információk számlálói

egy adott dátumtartományon
belül
A robot által közzétett változások
állapota a közzététel dátumára és
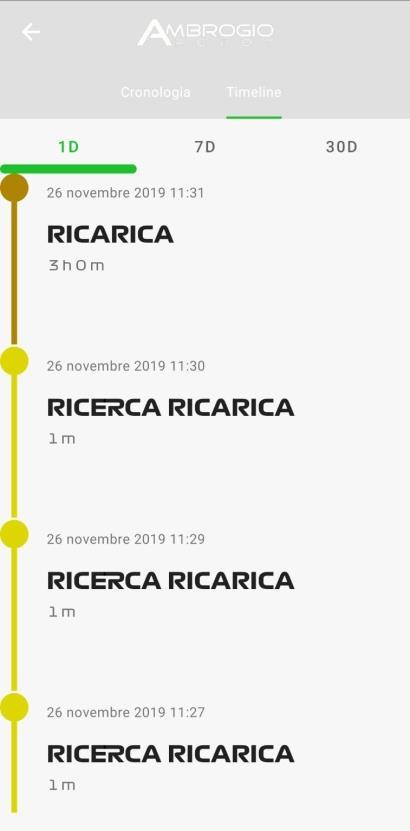
időpontjára vonatkozó
információkkal együtt
Grafikonok a robot által közzétett
állapotok százalékos arányáról
NEM TUDOK CSATLAKOZNI A
ROBOT BLUETOOTH-ÁHOZ
A ROBOT MUTATJA AZ INDÍTÓ LOGÓT
A robot ki- és bekapcsolása
Indítsa újra a bluetooth
kártyát az okostelefonban
Próbálja meg újra elvégezni a robot frissítését
Ellenőrizze az alaplap és a kijelző közötti kapcsolatot.
A BILLENTYŰZETEN VILLOG A
RIASZTÁSI LED
Csatlakoztassa a robotot a Remote App alkalmazáshoz, és ellenőrizze az esetleges hibákat.
1. Bejelentkezés az adatok szinkronizálásához az okostelefonon és a laptopon lévő alkalmazás között (Cassiopea felhasználó és jelszó)
2. Hozzáférés a Cassiopea dokumentumrészlegéhez, ahol a robotokra vonatkozó összes szerviz- és marketingdokumentumot megtalálja.
3. Robotok felhasználói kézikönyveinek elolvasása
4. Vásároljon utalványokat az IoT-kapcsolatra vonatkozó szerződés megújításához
5. A robot szoftverének frissítése
6. Robotjelentés letöltése
7. A Szerviz menü beállításainak beállítása (csak AM4000 alaplappal felszerelt modellek)
8. Végezze el a tesztet a robot érzékelőin (csak az AM4000 alaplappal felszerelt modellek).
9. SD-tartalom letöltése (csak AM4000 alaplappal felszerelt modell)
10.Amico eszközinformációk letöltése (csak AM4000 alaplappal felszerelt modell)
11.Speciális funkció: alaplap visszaállítása, robot jelszó visszaállítása, előzetes programozás.
12.Regisztrálja a téli szervizt 6 év garanciára (csak 4.0 és 4.36 modellek)
13.Adatok importálása a régi alaplapról az új alaplapra (csak AM4000 alaplappal felszerelt modell)
Az alkalmazás funkcióinak magyarázata elérhető a Cassiopea dokumentumrészlegében, keresse a "Service App" címkét.
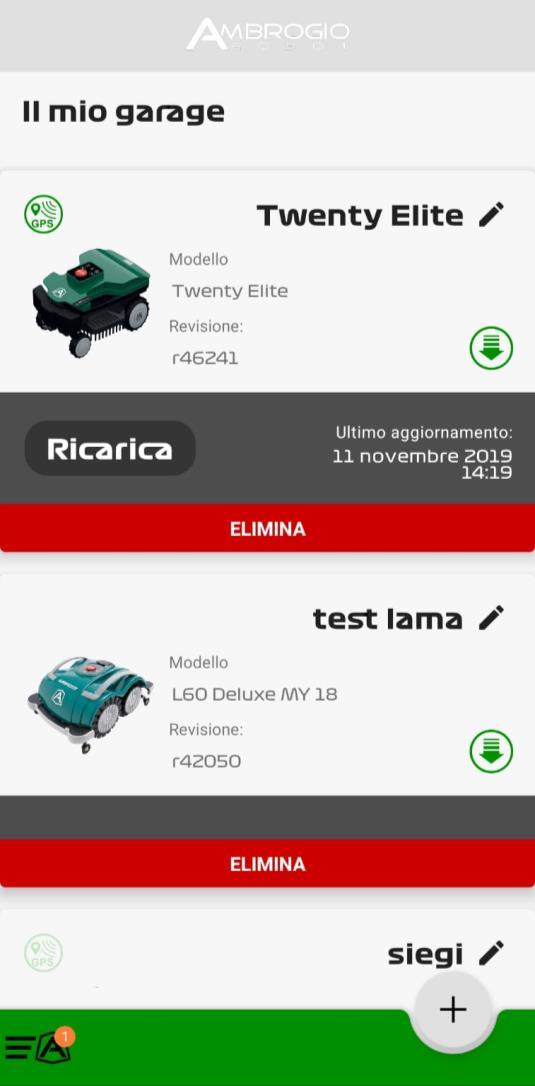
Navigáljon az alkalmazás
szekcióban
A garázsban lévő robot keresése (sorozatszám, egyéni név, robotmodell)
Szinkronizálás gomb
Robot szoftverfrissítés elérhető
Szerviz dátum riasztás
Robot és ügyfél-információk
Akkumulátor feltöltési riasztás
Új robot párosítás
Áttekintés a a robot adatok

A robot
működési adatainak ellenőrzése
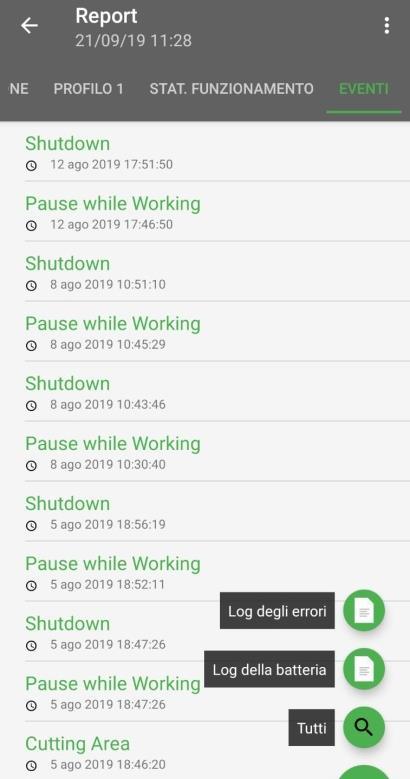
LOG-ok listája: akkumulátor- és
hibanaplók.
-A robot minden funkciója
naplózza a dátumot és az időt
-Minden hiba naplója dátummal
és időponttal
FONTOS: ez a funkció fontos a robot állapotának és
működésének megismeréséhez.