
WWW.JAMRIS.ORG pISSN 1897-8649 (PRINT)/eISSN 2080-2145 (ONLINE) VOLUME 19, N° 4, 2025
Indexed in SCOPUS


WWW.JAMRIS.ORG pISSN 1897-8649 (PRINT)/eISSN 2080-2145 (ONLINE) VOLUME 19, N° 4, 2025
Indexed in SCOPUS
A peer-reviewed quarterly focusing on new achievements in the following fields: • automation • systems and control • autonomous systems • multiagent systems • decision-making and decision support • • robotics • mechatronics • data sciences • new computing paradigms •
Editor-in-Chief
Janusz Kacprzyk (Polish Academy of Sciences, Łukasiewicz-PIAP, Poland)
Advisory Board
Dimitar Filev (Research & Advenced Engineering, Ford Motor Company, USA)
Kaoru Hirota (Tokyo Institute of Technology, Japan)
Witold Pedrycz (ECERF, University of Alberta, Canada)
Co-Editors
Roman Szewczyk (Łukasiewicz-PIAP, Warsaw University of Technology, Poland)
Oscar Castillo (Tijuana Institute of Technology, Mexico)
Marek Zaremba (University of Quebec, Canada)
Executive Editor
Katarzyna Rzeplinska-Rykała, e-mail: office@jamris.org (Łukasiewicz-PIAP, Poland)
Associate Editor
Piotr Skrzypczyński (Poznań University of Technology, Poland)
Statistical Editor
Małgorzata Kaliczyńska (Łukasiewicz-PIAP, Poland)
Editorial Board:
Chairman – Janusz Kacprzyk (Polish Academy of Sciences, Łukasiewicz-PIAP, Poland)
Plamen Angelov (Lancaster University, UK)
Adam Borkowski (Polish Academy of Sciences, Poland)
Wolfgang Borutzky (Fachhochschule Bonn-Rhein-Sieg, Germany)
Bice Cavallo (University of Naples Federico II, Italy)
Chin Chen Chang (Feng Chia University, Taiwan)
Jorge Manuel Miranda Dias (University of Coimbra, Portugal)
Andries Engelbrecht ( University of Stellenbosch, Republic of South Africa)
Pablo Estévez (University of Chile)
Bogdan Gabrys (Bournemouth University, UK)
Fernando Gomide (University of Campinas, Brazil)
Aboul Ella Hassanien (Cairo University, Egypt)
Joachim Hertzberg (Osnabrück University, Germany)
Tadeusz Kaczorek (Białystok University of Technology, Poland)
Nikola Kasabov (Auckland University of Technology, New Zealand)
Marian P. Kaźmierkowski (Warsaw University of Technology, Poland)
Laszlo T. Kóczy (Szechenyi Istvan University, Gyor and Budapest University of Technology and Economics, Hungary)
Józef Korbicz (University of Zielona Góra, Poland)
Eckart Kramer (Fachhochschule Eberswalde, Germany)
Rudolf Kruse (Otto-von-Guericke-Universität, Germany)
Ching-Teng Lin (National Chiao-Tung University, Taiwan)
Piotr Kulczycki (AGH University of Science and Technology, Poland)
Andrew Kusiak (University of Iowa, USA)
Mark Last (Ben-Gurion University, Israel)
Anthony Maciejewski (Colorado State University, USA)
Typesetting
SCIENDO, www.sciendo.com
Webmaster TOMP, www.tomp.pl
Editorial Office
ŁUKASIEWICZ Research Network
– Industrial Research Institute for Automation and Measurements PIAP
Al. Jerozolimskie 202, 02-486 Warsaw, Poland (www.jamris.org) tel. +48-22-8740109, e-mail: office@jamris.org
The reference version of the journal is e-version. Printed in 100 copies.
Articles are reviewed, excluding advertisements and descriptions of products.
Papers published currently are available for non-commercial use under the Creative Commons Attribution-NonCommercial-NoDerivs 4.0 (CC BY-NC-ND 4.0) license. Details are available at: https://www.jamris.org/index.php/JAMRIS/ LicenseToPublish
Open Access.
Krzysztof Malinowski (Warsaw University of Technology, Poland)
Andrzej Masłowski (Warsaw University of Technology, Poland)
Patricia Melin (Tijuana Institute of Technology, Mexico)
Fazel Naghdy (University of Wollongong, Australia)
Zbigniew Nahorski (Polish Academy of Sciences, Poland)
Nadia Nedjah (State University of Rio de Janeiro, Brazil)
Dmitry A. Novikov (Institute of Control Sciences, Russian Academy of Sciences, Russia)
Duc Truong Pham (Birmingham University, UK)
Lech Polkowski (University of Warmia and Mazury, Poland)
Alain Pruski (University of Metz, France)
Rita Ribeiro (UNINOVA, Instituto de Desenvolvimento de Novas Tecnologias, Portugal)
Imre Rudas (Óbuda University, Hungary)
Leszek Rutkowski (Czestochowa University of Technology, Poland)
Alessandro Saffiotti (Örebro University, Sweden)
Klaus Schilling (Julius-Maximilians-University Wuerzburg, Germany)
Vassil Sgurev (Bulgarian Academy of Sciences, Department of Intelligent Systems, Bulgaria)
Helena Szczerbicka (Leibniz Universität, Germany)
Ryszard Tadeusiewicz (AGH University of Science and Technology, Poland)
Stanisław Tarasiewicz (University of Laval, Canada)
Piotr Tatjewski (Warsaw University of Technology, Poland)
Rene Wamkeue (University of Quebec, Canada)
Sławomir Wierzchon (Polish Academy of Sciences, Poland)
Janusz Zalewski (Florida Gulf Coast University, USA)
Teresa Zielińska (Warsaw University of Technology, Poland)
Publisher:
Copyright © by Łukasiewicz

VOLUME 19, N˚4, 2025
1
Positivity and Stability of Descriptor DiscreteTime Linear Systems with Interval State Matrices
Tadeusz Kaczorek
DOI: 10.14313/jamris‐2025‐030
7
Innovation Capacities and Business Models in Colombian Farming Organizations
Daniela Niño‐Amezquita, Jhancarlos Gutiérrez‐Ayala, Diana María Dueñas Quintero, Fabio Blanco‐Mesa, Eduardo Covarrubias‐Audelo
DOI: 10.14313/jamris‐2025‐031
18
A 2-tuple Linguistic Dynamic Owawa Aggregation Operator and its Application to Multi-Attribute Decision-Making
Yeleny Zulueta‐Véliz, Carlos Rafael Rodríguez Rodríguez, Aylin Estrada Velazco
DOI: 10.14313/jamris‐2025‐032
26
Partitioning of Complex Discrete Models for Highly Scalable Simulations
Jakub Ziarko, Mateusz Najdek, Wojciech Turek
DOI: 10.14313/jamris‐2025‐033
35
Advancements in Industry-Agriculture 5.0: Utilizing Unmanned Ground and Aerial Vehicles for Sustainable Precision Agriculture
Ismail Bogrekci, Pinar Demircioglu
DOI: 10.14313/jamris‐2025‐034
In-Flight Solar Radiation Intensity Measurement Using a Small Unmanned Aerial Vehicle
Rafał Oz̀óg, Mariusz Jacewicz, Robert Głębocki, Juliusz
Hanke
DOI: 10.14313/jamris‐2025‐035
Challenges in Predicting Smart Grid Stability Linked with Renewable Energy Resources through Spark MLlib Learning
Amal Zouhri, Ismail Boumhidi, Ismail Boumhidi, Abderahamane Ez‑Zahout, Said Chakouk, Mostafa El Mallahi
DOI: 10.14313/jamris‐2025‐036
Enhancing Efficiency And Security In Healthcare IoT: A Novel Approach for Fog Computing Resource Optimization Using TGA-RNN
Rahul Jaywantrao Shimpi, Vibha Tiwari
DOI: 10.14313/jamris‐2025‐037
94
Finding the Sweet Spot: A Study of Data Augmentation Intensity for Small-Scale Image Classification
Windra Swastika
DOI: 10.14313/jamris‐2025‐038
102
Design of a Fuzzy PID Controller to Improve Electric Vehicles Performance Based on Regenerative Braking System
Hayder Abdulabbas Abdulameer, M A Khamis, Mo‐hammed Joudah Zaiter, Karin Ennser
DOI: 10.14313/jamris‐2025‐039
109
RETRACTION NOTE
DOI: 10.14313/jamris‐2025‐040
DOI:10.14313/jamris‐2025‐030
Abstract:
Submitted:8th July2024;accepted:20th May2025
TadeuszKaczorek
Thepositivityandstabilityofdescriptordiscrete‐time linearsystemswithintervalstatematricesareaddressed. Necessaryandsufficientconditionsforthepositivityof descriptordiscrete‐timelinearsystemsareestablished. Thestabilityofdescriptorlinearsystemswithinterval statematricesisinvestigated.
Keywords: Descriptor,Linear,Discrete‐time,Intervalsys‐tem,Positivity,stability
1.Introduction
Adynamicalsystemiscalledpositiveifitsstate variablestakenonnegativevaluesforallnonnegative inputsandnonnegativeinitialconditions.Positivelin‐earsystemshavebeeninvestigatedin[1,5,10,11], whilepositivenonlinearsystemshavebeenstudied in[6,7,9,17,19].
Examplesofpositivesystemsincludeindustrial processesinvolvingchemicalreactors,heatexchang‐ers,anddistillationcolumns,aswellasstoragesys‐tems,compartmentalsystems,andmodelsforwater andatmosphericpollution.Avarietyofmodelshaving positivelinearbehaviorcanbefoundinengineering, managementscience,economics,socialsciences,biol‐ogy,andmedicine.
Positivelinearsystemswithdifferentfractional ordershavebeenaddressedin[3,12,14,23].Descrip‐tor(singular)linearsystemshavebeenanalyzedin [9, 15, 16],andthestabilityofaclassofnonlinear fractional‐ordersystemsin[6, 13, 19, 26].Applica‐tionofDrazininversetotheanalysisofdescriptor fractionaldiscrete‐timelinearsystemshasbeenpre‐sentedin[8],andstabilityofdiscrete‐timeswitched systemswithunstablesubsystemsin[24].Therobust stabilizationofdiscrete‐timepositiveswitchedsys‐temswithuncertaintieshasbeenaddressedin[25]. Comparisonofthreemethodsofanalysisofthe descriptorfractionalsystemshasbeenpresentedin [22].Stabilityoflinearfractionalordersystemswith delayshasbeenanalyzedin[2],andsimpleconditions forpracticalstabilityofpositivefractionalsystems havebeenproposedin[4].Theasymptoticstabilityof intervalpositivediscrete‐timelinearsystemshasbeen investigatedin[18].
Inthispaper,thepositivityandstabilityofdescrip‐tordiscrete‐timelinearsystemswithintervalstate matriceswillbeaddressed.

Thepaperisorganizedasfollows.InSection 2,somebasicde initionsandtheoremsrelatedto descriptordiscrete‐timelinearsystemsarereviewed. InSection3,thepositivityofdescriptordiscrete‐time linearsystemsisinvestigated.Thestabilityofpositive descriptorlineardiscrete‐timesystemsisanalyzedin Section4,andthestabilityofpositivedescriptorlinear systemswithintervalstatematricesisanalyzedin Section5.Concludingremarksaregiveninsection6. Thefollowingnotationswillbeused:R‐theset ofrealnumbers,R������ ‐thesetofnxmrealmatrices, R������ + ‐thesetof nxm realmatriceswithnonnegative entriesandR�� + =R����1 + ,Z+ ‐thesetofnonnegative integers,I��− ‐the nxn identitymatrix,forA=[a����]∈ R������ andB=[b����]∈R������ andinequalityA=Bmeans a���� =b���� fori,j=1.2,…n.
2.Preliminaries
Considertheautonomousdescriptordiscrete‐time linearsystem ������+1 =������,��∈��+ ={0,1,...}, (1)
where���� ∈ℜ�� isthestatevectorand��,��∈ℜ��×�� .
Itisassumedthat det[����−��]≠0forsome��∈ C (the ieldofcomplexnumbers) (2)
Inthiscase,thesystem(1)hasauniquesolution foradmissibleinitialconditions��0 ∈ℜ�� +.
Itiswell‐known[20]thatif(2)holds,thenthere existsapairofnonsingularmatrices��,��∈ℜ��×�� such that ��[����−��]��= ����1 ��−��1 0 0����−����2 , ��1 ∈ℜ��1×��1,��∈ℜ��2×��2 , (3)
where��1 = deg{det[����−��]}and N isthenilpotent matrix,i.e. ���� =0, ����−1 ≠0 (�� isthenilpotency index).
Tosimplifytheconsiderations,itisassumedthat thematrix N hasonlyoneblock.
Thenonsingularmatrices P and Q canbefound, forexample,bytheuseofelementaryrowandcolumn operations[20]: 1) Multiplicationofany i‐throw(column)bythe number��≠0.Thisoperationwillbedenotedby ��[��×��](��[��×��]).
2) Additiontoany i‐throw(column)ofthe j‐throw (column)multipliedbyanynumber ��≠0.This operationwillbedenotedby��[��+��×��](��[��+��×��]).
3) Interchangeofanytworows(columns).Thisoper‐ationwillbedenotedby��[��,��](��[��,��]).
De inition2.1. [5,11]Theautonomousdiscrete‐time linearsystem ����+1 =������,��∈ℜ��×�� (4)
iscalled(internally)positiveif���� ∈ℜ�� +,��∈��+ forall ��0 ∈ℜ�� +
Theorem2.1. [5,11]Thesystem(4)ispositiveifand onlyif ��∈ℜ��×�� + . (5)
De inition2.2. [5,11]Thepositivesystem(4)iscalled asymptoticallystable(Schur)if lim ��→∞ ���� =0forall��0 ∈ℜ��1 + (6)
Theorem2.2. [18]Thepositivesystem(4)isasymp‐toticallystableifandonlyifoneoftheequivalent conditionsissatis ied:
1) Allcoef icientsofthecharacteristicpolynomial det[����(��+1)−��]=����+����−1����−1+...+��1��+��0 (7) arepositive,i.e.���� >0for��=0,1,...,��−1
2) Thereexistsastrictlypositivevector ��= [��1 ⋯����]�� ,���� >0,��=1,…,��suchthat ����<��. (8)
3.PositiveDescriptorLinearSystems
Inthissection,thenecessaryandsuf icientcon‐ditionsforthepositivityofthedescriptorlinear discrete‐timesystemswillbeestablished.
De inition3.1. Thedescriptorsystem(1)iscalled (internally)positiveif���� ∈ℜ�� +,��∈��+ foralladmissi‐blenonnegativeinitialconditions��0 ∈ℜ�� +
Theorem3.1. Thedescriptorsystem(1)ispositiveif andonlyifthematrix E hasonlylinearlyindependent columns,andthematrix��1 ∈ℜ��1×��1 + .
Proof. Usingthecolumnpermutation(thematrix Q) wechoose ��1 linearlyindependentcolumnsofthe matrix E asits irstcolumns.Next,usingelemen‐taryrowoperations(thematrixP),wetransformthe matrix E totheform ����1 0 0�� andthematrix A tothe form ��1 0 0����2 .From(2),itfollowsthatthesystem(1) hasbeendecomposedintothefollowingtwoindepen‐dentsubsystems
where
and
+ (11)
and Q and��−1 arepermutationmatrices. Notethatthesolution ��1,�� =���� 1��10, ��∈��+ of (9)isnonnegativeifandonlyif��1 ∈ℜ��1×��1 + andthe solution��2,�� of(10)iszerofor��=1,2,...
Example3.1. Considerthedescriptorsystem(1)with thematrices ��= ⎡ ⎢ ⎢ ⎣ 0002 010−2 1−200 000−2 ⎤ ⎥ ⎥ ⎦ ,��= ⎡ ⎢ ⎢ ⎢ ⎣ 0101 1−2 3 0−1 0 2 3 10 1−10−1
Thecondition(2)issatis iedsince det[����−��]= 0−102��−1 −1��+ 2 3 0−2��+1 ��−2��− 2 3 −10
=−2��2 + 5 3 ��− 1 3 (13) and��1 =2.Inthiscase����������=3and��=����������− ��1 +1=2.Performingonthematrix
⎡ ⎢ ⎢ ⎢ ⎣ 0−102��−1 −1��+ 2 3 0−2��+1 ��−2��− 2 3 −10 −110−2��+1
(14)
thefollowingcolumnshowselementaryoperations ��[4×1 2],��[4,1]andtherowoperations��[2+4×(−1)], ��[4+1×1],��[3+2×2]weobtain ��1 = 1 2 1 0 1 3 ,��= 01 00 . (15)
Inthiscase,thematrices Q and P havetheforms
⎡ ⎢ ⎢ ⎢
(16)
ByTheorem3.1,thedescriptorsystem(1)with(12) ispositivesince��1 ∈ℜ2×2 + andthematrix Q ismono‐mial.
4.StabilityofPositiveDescriptorLinearSys‐tems
Considerthedescriptorsystem(1)satisfyingthe condition(2).
Lemma4.1. Thecharacteristicpolynomialsofthesys‐tem(1)andofthematrix��1 ∈ℜ��1×��1 arerelatedby det[����1 ��−��1]=��det[����−��], (17) where��=(−1)��2 det��det��.
Proof. From(2)wehave ������[����1 ��−��1]=(−1)��2 det ����1 ��−��1 0 0����−����2 =(−1)��2 det��det[����−��]det�� =��det[����−��]. (18)
Theorem4.1. Thepositivedescriptorsystem(1)is asymptoticallystableifandonlyifoneofthefollowing equivalentconditionsissatis ied:
1) Allcoef icientsofthecharacteristicpolynomial det[����1(��+1)−��1]=����1+����1−1����1−1+...+��1��+��0 (19) arepositive,i.e.���� >0for��=0,1,...,��1 −1
2) Allcoef icientsofthecharacteristicequationofthe matrix����−�� det[��(��+1)−��]=̄����1 ����1 +̄����1−1����1−1 +...+̄��1��+̄��0 =0 (20) arepositive.
3) Thereexistsastrictlypositivevector ��= [��1 ⋯����1]�� ,���� >0,��=1,...,��1 suchthat ��1��<��. (21)
4) Thereexistsastrictlypositivevector ��= [��1 ����1]�� ,���� >0,��=1,...,��1 suchthat ������<��, (22a) where ��=����1 ����1, (22b)
����1
∈ℜ��1×��1 + consistsof ��1 nonzerorowsof ����1 ∈ℜ��×��1 + whichisbuiltof irst��1 columnsof thematrix Q de inedby(2), ����1 ∈ℜ��1×�� consistsof��1 rowsofthematrix P de inedby(2),
��∈ℜ��×��1 consistsof��1 columnsof��∈ℜ��×�� correspondingtothenonzerorowsof����1 Proof. Proofofcondition1)followsimmediatelyfrom condition1)ofTheorem2.2.ByLemma4.1det[����1(��+ 1)−��1]=0ifandonlyifdet[��(��+1)−��]=0.There‐fore,thepositivedescriptorsystem(1)isasymptot‐icallystableifandonlyifallcoef icientsof(20)are positive.
From(2),wehave ��1 =����1������1 (23) andusing(8),weobtain ��1��=����
��1 ��<�� (24) forsomestrictlypositivevector��∈ℜ��1 + .Premultiply‐ing(24)by����1 andtakingintoaccount����1 ��= ��and eliminatingfrom A allcolumnscorrespondingtozero rowsof����1 weobtain(22).
Example4.1. (ContinuationofExample3.1)Using Theorem4.1,checktheasymptoticstabilityofthe positivedescriptorsystem(1)withthematrices(12). Thematrix��1 ofthesystemisgivenby(15)andits characteristicpolynomial
det[��2(��+1)−��1]= ��+ 1 2 −1 0��+ 1 3
��+ 1 3 (25) haspositivecoef icients.Therefore,bycondition1)of Theorem4.1,thematrix��1 isasymptoticallystable. Thecharacteristicequation(20)ofthematrices (12)
det[��(��+1)−��] = 0 −102��+1 −1��+ 5 3 0−2��−1 ��+1−2��− 8 3 −10 −1 10−2��−1
=2��2 + 7 3 ��+ 2
(26) haspositivecoef icientsandbycondition2)ofTheo‐rem4.1,thepositivesystemisasymptoticallystable. Inthiscasewehave
(27) and
Therefore,using(22a),(27),and(28),weobtain
(29) andbycondition(22),thepositivesystemisasymp‐toticallystable.
5.StabilityofPositiveDescriptorLinearSys‐temsWithIntervalStateMatrices
Considertheautonomousdescriptorpositivelin‐earsystem ������+1 =������,��∈��+ (30) where���� ∈ℜ�� isthestatevector,��∈ℜ��×�� isconstant (exactlyknown)and ��∈ℜ��×�� isanintervalmatrix de inedby ��≤��≤��orequivalently��∈[��,��]. (31)
Itisassumedthat
det[����−��]≠0anddet[����−��]≠0 (32)
andthematrix E hasonlylinearlyindependent columns.
Iftheseassumptionsaresatis ied,thenthereexist twopairsofnonsingularmatrices (��1,��1), (��2,��2) suchthat
columnsandintervalmatrix A isasymptoticallystable ifandonlyifthereexistsastrictlypositivevector��∈ ℜ�� + suchthat ������<��and������<��, (38) where��isde inedby(22b).
Proof. Byassumption,thematrix E hasonlylinearly independentcolumnsand ��=������ ∈ℜ�� + isstrictly positiveforany���� ∈ℜ�� + withallpositivecomponents. Bycondition2)ofTheorem2.2andTheorem5.2, thepositivedescriptorsystemwithinterval(31)is asymptoticallystableifandonlyiftheconditions(38) aresatis ied.
Example5.1. (ContinuationofExample4.1)Consider thepositivedescriptorsystem(30)with E givenby (12)andtheintervalmatrix A with
= ⎡ ⎢ ⎢ ⎣ 0100.4 0−0.70−0.4 1−0.610 0−10−0.4
Theorem5.1. Iftheassumptionsaresatis ied,then theintervaldescriptorsystem(30)with(31)ispos‐itiveifandonlyif
and��1 ∈ℜ��1×��1 + (34)
Proof. TheproofissimilartotheproofofTheorem3.1.
De inition5.1. Thepositivedescriptorintervalsys‐tem(30)iscalledasymptoticallystable(Schur)ifthe systemisasymptoticallystableforallmatrices E,��∈ [��,��].
Theorem5.2. Ifthematrices��and��ofthepositive system(30)isasymptoticallystable,thenitsconvex linearcombination
��=(1−��)��+����for0≤��≤1 (35) isalsoasymptoticallystable.
Proof. Bycondition2)ofTheorem2.2,ifthepositive systemsareasymptoticallystable,thenthereexistsa strictlypositivevector��∈ℜ�� + suchthat ����<��and����<��. (36)
Using(35)and(36),weobtain ����=[(1−��)��+����]�� =(1−��)����+������<(1−��)��+���� =��for0≤��≤1. (37)
Therefore,ifthematrices��and��(36)hold,then theconvexlinearcombinationisalsoasymptotically stable.
Theorem5.3. Thepositivedescriptorsystem(30) withthematrix E withonlylinearlyindependent
⎡ ⎢ ⎢ ⎣ 0100.8 0−0.40−0.8 1−1.210 0−10−0.8
(39)
WeshallcheckthestabilityofthesystemusingTheo‐rem5.3.Thematrices Q and P havethesameform(16) asinExamples3.1and4.1.Therefore,thematrix��in (38)isthesameasinExample4.1,anditisgivenby (27).Takingintoaccountthatinthiscase
⎥ ⎥ ⎦ (40) andusing(38),weobtain
Therefore,byTheorem5.3,thepositivedescriptor systemisasymptoticallystable.
Thepositivityandasymptoticstabilityofdescrip‐torlineardiscrete‐timesystemshavebeenaddressed. Necessaryandsuf icientconditionsforthepositiv‐ity(Theorem3.1)ofthedescriptorlineardiscrete‐timesystemsandfortheasymptoticstability(The‐orem4.1)ofpositivedescriptorsystemshavebeen established.Ithasbeenshownthatthedescriptor linearsystemsarepositiveifandonlyiftheconditions (34)aresatis ied(Theorem5.1).Necessaryandsuf i‐cientconditionsfortheasymptoticstabilityofaposi‐tivedescriptorlinearsystem(30)withintervalstate matriceshavealsobeenestablished(Theorem5.3). Numericalexamplesofdescriptorpositivediscrete‐timelinearsystemshaveillustratedtheconsidera‐tions.
Theconsiderationscanbeextendedtocontinuous‐timeanddiscrete‐timepositivefractionallinearsys‐tems.
AUTHOR
TadeuszKaczorek∗–BialystokUniversityofTechnol‐ogy,Poland,e‐mail:kaczorek@ee.pw.edu.pl.
∗Correspondingauthor
ACKNOWLEDGEMENTS
ThisworkwassupportedbytheNationalScience Centreincountry‐regionplacePolandunderwork No.2014/13/B/ST7/03467.
References
[1] A.BermanandR.J.Plemmons,“Nonnegative matricesinthemathematicalsciences”,SIAM, 1994.
[2] M.Busłowicz,“Stabilityoflinearcontinuous‐timefractionalordersystemswithdelaysofthe retardedtype”, BulletinofthePolishAcademyof SciencesTechnicalSciences,vol.56,no.4,2008, 319–324.
[3] M.Busłowicz,“Stabilityanalysisofcontinuous‐timelinearsystemsconsistingofnsubsystems withdifferentfractionalorders”, Bulletinofthe PolishAcademyofSciencesTechnicalSciences,vol. 60,no.2,2012,279–284.
[4] M.BusłowiczandT.Kaczorek,“Simplecondi‐tionsforpracticalstabilityofpositivefractional discrete‐timelinearsystems”, InternationalJournalofAppliedMathematicsandComputerScience,vol.19,no.2,2009,263–269.
[5] L.FarinaandS.Rinaldi,“Positivelinearsystems: theoryandapplications”,J.Wiley,NewYork, 2000.
[6] T.Kaczorek,“Analysisofpositivityandstability offractionaldiscrete‐timenonlinearsystems”, BulletinofthePolishAcademyofSciencesTechnicalSciences,vol.64,no.3,2016,491–494.
[7] T.Kaczorek,“Analysisofpositivityandstability ofdiscrete‐timeandcontinuous‐timenonlinear systems”, ComputationalProblemsofElectrical Engineering,vol.5,no.1,2015.
[8] T.Kaczorek,“ApplicationofDrazininverseto analysisofdescriptorfractionaldiscrete‐time linearsystemswithregularpencils”, InternationalJournalofAppliedMathematicsandComputerScience,vol.23,no.1,2013,29–34.
[9] T.Kaczorek,“Descriptorpositivediscrete‐time andcontinuous‐timenonlinearsystems”, ProceedingsofSPIE,vol.9290,2014. https://doi.org/10.1117/12.2074558.
[10] T.Kaczorek,“Fractionalpositivecontinuous‐timelinearsystemsandtheirreachability”, InternationalJournalofAppliedMathematicsand ComputerScience,vol.18,no.2,2008,223–228.
[11] T.Kaczorek,“Positive1Dand2Dsystems”, Springer‐Verlag,London,2002.
[12] T.Kaczorek,“Positivelinearsystemswithdif‐ferentfractionalorders”, BulletinofthePolish AcademyofSciencesTechnicalSciences,vol.58, no.3,2010,453–458.
[13] T.Kaczorek,“Positivityandstabilityofstandard andfractionaldescriptorcontinuous‐timelin‐earandnonlinearsystems”, InternationalJournal ofNonlinearSciencesandNumericalSimulation, 2017(inpress).
[14] T.Kaczorek,“Positivelinearsystemsconsisting ofnsubsystemswithdifferentfractionalorders”, IEEETransactionsonCircuitsandSystems,vol. 58,no.7,2011,1203–1210.
[15] T.Kaczorek,“Positivefractionalcontinuous‐time linearsystemswithsingularpencils”, Bulletinof thePolishAcademyofSciencesTechnicalSciences, vol.60,no.1,2012,9–12.
[16] T.Kaczorek,“Positivesingulardiscrete‐timelin‐earsystems”, BulletinofthePolishAcademyof SciencesTechnicalSciences,vol.45,no.4,1997, 619–631.
[17] T.Kaczorek,“Positivityandstabilityofdiscrete‐timenonlinearsystems”, IEEE2ndInternational ConferenceonCybernetics,2015,156–159.
[18] T.Kaczorek,“Stabilityofintervalpositive discrete‐timelinearsystems”,submittedto BulletinofthePolishAcademyofSciences TechnicalSciences,2017.
[19] T.Kaczorek,“Stabilityoffractionalpositivenon‐linearsystems”, ArchivesofControlSciences,vol. 25,no.4,2015,491–496.https://doi.org/10.1 515/acsc‐2015‐0031.
[20] T.Kaczorek,“Theoryofcontrolandsystems”, PWN,Warszawa,1993(inPolish).
[21] V.L.Kharitonov,“Asymptoticstabilityofanequi‐libriumpositionofafamilyofsystemsofdif‐ferentialequations”, DifferentsialnyeUravneniya, vol.14,1978,2086–2088.
[22] Ł.Sajewski,“Descriptorfractionaldiscrete‐time linearsystemanditssolution–comparison ofthreedifferentmethods”, Challengesin Automation,RoboticsandMeasurement Techniques,AdvancesinIntelligentSystems andComputing,vol.440,2016,37–50.
[23] Ł.Sajewski,“Descriptorfractionaldiscrete‐time linearsystemwithtwodifferentfractional ordersanditssolution”, BulletinofthePolish AcademyofSciencesTechnicalSciences,vol.64, no.1,2016,15–20.
[24] H.Zhang,D.Xie,H.Zhang,andG.Wang,“Stability analysisfordiscrete‐timeswitchedsystemswith unstablesubsystemsbyamode‐dependentaver‐agedwelltimeapproach”, ISATransactions,vol. 53,2014,1081–1086.
[25] J.Zhang,Z.Han,H.WuandJ.Hung,“Robust stabilizationofdiscrete‐timepositiveswitched systemswithuncertaintiesandaveragedwell timeswitching”, Circuits,SystemsandSignalProcessing,vol.33,2014,71–95.
[26] W.Xiang‐Jun,W.Zheng‐Mao,andL.Jun‐Guo, “Stabilityanalysisofaclassofnonlinear fractional‐ordersystems”, IEEETransactionson CircuitsandSystemsII:ExpressBriefs,vol.55,no. 11,2008,1178–1182.
Submitted:20th February2025;accepted:17th September2025
DanielaNiño‑Amezquita,JhancarlosGutiérrez‑Ayala,DianaMaríaDueñasQuintero,FabioBlanco‑Mesa, EduardoCovarrubias‑Audelo
DOI:10.14313/jamris‐2025‐031
Abstract:
Themainobjectiveofthispaperistoanalyzetheinter‐actionbetweeninnovationcapabilitiesandelementsof thebusinessmodeloffarmingorganizationsinBoyacá, Colombia.Thisstudyusedaquantitativemethodology, employingthePartialLeastSquaresPathModeling(PLS‐PM)technique.Thetheoreticalmodelincludesseven hypothesesthatoutlinetherelationshipsbetweeninno‐vationcapabilities(sensing,seizing,andtransformation) andabusinessmodel(creation,delivery,andcapture). Thestudyrevealedasignificantcorrelationbetweenthe abilitytodetectandretaininnovationandthedevel‐opmentandimplementationofbusinessmodels.This underscoresthesignificanceofcontinuouslearningand efficientalliancemanagementinacquiringandutilizing environmentalknowledge.Theimplicationsofthisstudy aredirectedtowardsdecision‐makers,stakeholders,and policymakerswithinColombia’sNationalAgricultural InnovationSystem(NAIS).Thestudyemphasizesthecru‐cialroleofawell‐integratedsystemamongitsvarious actorsininfluencingthesuccessofbusinessmodels. Itexaminesinnovationasadynamiccapabilityandits interplaywithvitalcomponentsofthebusinessmodel, therebyenhancingcomprehensionofbusinessdynamics withinthissector.
Keywords: InnovationCapabilities,BusinessModelInno‐vation,FarmingOrganizations.
TheResource‐basedview(RBV)providesaframe‐workforexaminingthedevelopmentofsustainable competitiveadvantagesovertime[1],whichmain‐tainsthatstrategicresourcescouldleadtosustained competitiveadvantage[2].Thisapproachsuggests thatorganizationaldiversityandheterogeneitycreate resourcesandcapabilitiesthatestablishacompetitive position.Fromthistheory,dynamiccapabilitiesview emerges,whereitassumesthatthevalueofstrate‐gicresourceswillerodeovertimeastrendsevolve [3].Hence,morethanjusthard‐to‐replicateassetsare needed;itisessentialtoequiponeselfwithcapabili‐tiestocreate,expand,andupdatetheorganization’s assetbase.Buildingontheoutlinedtheoreticalfoun‐dations,theroleofinnovationasacapabilityisestab‐lishedascrucialinvaluecreation.
Innovationcapabilityrepresentstheexploitative potentialofknowledge,fromitsexplorationandseiz‐ingwithinandoutsidethecompany[4].Innova‐tioninvolvesacomprehensiveprocessofknowledge exchangewiththeimplementationofnewideas,prod‐ucts,processes,orservices[5].Therefore,innovation canoccurwithinthebusinessmodel,embodyingthe deliveryofvalueandenablingorganizationstoadapt andpositionthemselvesinthevaluechain[6].
Innovationisin luencedbyenablingconditions andislinkedtohuman,organizational,orenviron‐mentalknowledgeandcapabilities[7].Intheagricul‐turalcontext,thesefactorsfacilitatetheemergence ofnewideasthatuseexistingresourcesandcapa‐bilitiestoidentifyopportunitiesandinnovativesolu‐tions[8,9],butitlacksinfrastructureandtechnology neededtodevelopcapabilitiestostimulateinnovation [10].Tosolvethat,farmersareconformedassociative unitsthathelpproducerstogainbargainingpower, reduceproductioncosts,improveproductivityand marketing,andmanagepriceuncertainty[11],where cohesionderivesfromthelinksoftrustandcoopera‐tionthatpromoteparticipatoryworkschemesamong itsmembers[12].Likewise,abusinessmodelmay involveacollaborativeprocessthatincludespartner‐shipstoaddresscommonissuesandachievesocial and inancialgoals,i.e.,associatingwithothersallows organizationstomarketwithlowerinvestmentsatan individuallevel[13].Therefore,analyzingtheinnova‐tioncapabilitiesandbusinessmodelsoftheseorga‐nizationscanprovideinsightintotheirsuccessfac‐torsandhowtoaddresschallengesusingtheirunique skillsandpreferencestomakesigni icantandnovel changestothekeycomponentsandarchitectureof abusinessmodel[14].Whiletheagriculturalsector requiresparticipationfrombothpublicandprivate entities,smallproducerscandeveloptheirowninno‐vativeapproachesconsideringtheiruniquecircum‐stances[15].Forinstance,inemergingeconomies suchasColombia,farmingorganizationsfacesignif‐icantobstaclesinobtainingdirectandfairaccessto variousresourcesthatcouldpotentiallyprovidecom‐petitiveadvantages.Althoughpossessingknowledge andexperienceacrossvariousdomains,theseorgani‐zationsstruggletoidentifythefactorsthatenablethe establishmentofinnovative,inclusive,andpro itable negotiationmodels.
Therefore,itisimperativetoexplorenewtheoret‐icalapproachesthatalignwiththerealitiesofthese organizations,facilitatingacomprehensivediscussion oftheirorganizationaldynamics.
Themainaimistoanalyzetheinteractionbetween innovationcapabilitiesandelementsofthebusiness modeloffarmingorganizationsinBoyacá,Colombia.It focusesonanalyzingthefactorsthataffectinnovation fromdynamiccapabilitiesperspectivewithinthebusi‐nessmodelsoftheorganizationsthatbringtogether farmers.ThisusedthePartialLeastSquaresPathMod‐eling(PLS‐PM)methodtoestimatetheproposedthe‐oreticalmodelandarepresentativesampleoffarm‐ingorganizationsinBoyacáareusedaswell.This methodexaminescomplexmultivariaterelationships betweenobservableandlatentvariables[16].Seven hypothesesareevaluatedconsideringtherelation‐shipsbetweeninnovationcapabilities(Sensing,seiz‐ing,andtransformation)andbusinessmodelinnova‐tion(creation,delivery,andvaluecapture)infarm‐ingorganizations.Findingshighlightastrongcorrela‐tionbetweeninnovationsensingandseizingcapabil‐itiesandthecreationanddeliveryofbusinessmod‐els.Thedocumentisstructuredasfollows:Section2 presentsatheoreticalfoundation.Section3showsthe methodologicalcomponenttovalidatethehypotheses suggestedinthetheoreticalmodel.Sections4and5 presentresultsandadiscussionontheestimationof themodel.Finally,Section6showstheconclusions drawnabouttherelatedelements.
2.1.DynamicCapabilities
Extensiveresearchhasbeenconductedonthe creationanddevelopmentofcompetitiveadvantages inorganizations.Previousstudieshaveanalyzedthe dynamicsofstrengthsandmeasurestomitigate potentialthreatsthatcanleadtoafavorablecom‐petitiveposition[17].Thesestudiesexaminedthe resources,capabilities,andstrategiesthatarecompa‐rableamongdifferentcompaniesinaspeci icindustry butuniqueinobtainingacompetitiveadvantage[1]. Capabilitiesareresourcesusedtogainacompetitive advantage,whosevalueisdeterminedbythemar‐ketcontext[18].Theydevelopatdifferentratesand havelifecyclesthatdemonstratehowtheyarecon ig‐uredtogenerateadvantages[19].LawsonandSam‐son[20]arguethatcapabilitiesenhancemanagement andresourceutilizationforinnovationandtechnolog‐icaldevelopmentthroughlearningprocesses,prod‐uctdevelopment,andprocessimprovement(p.379). Likewise,capabilitiesundergoacontinuousadaptive process,inwhichstrategicmanagementadjusts,inte‐grates,andrestructuresbothinternalandexternal elements,i.e.,itistheabilitytoconsistentlyreinvent capabilitiesinresponsetoachangingenvironment [21].Thus,thisperspectivesuggeststhatthedevelop‐mentofnewcapabilitiesareanopportunitytoachieve sustainableresultswithinorganizationsovertimein linewithchangingenvironments[18].
Finally,thisdynamicincapabilitiesdevelopment promotestheabilitytoinnovate,duetohowit involvesacontinuousprocessofutilizing,exploring, andexploitingknowledgetocreatenewproducts, services,orprocesses[6].Indeed,innovationinthis dynamicisknownasinnovationcapability,foritis constantlyengagedintheuse,exploration,andhar‐nessingofknowledge.Hence,innovationcapability translatesknowledgeintopioneeringproductsand servicesthatcanadapttotheever‐changingenviron‐ment[4].
Innovationcapabilitiesarepartofadynamicpro‐cessthatcanbeexplainedbythemicro‐foundations ofsensing,seizing,andtransforming[2].Sensing involvesidentifyingopportunitiesthroughskillssuch asexploration,knowledgegeneration,andnetwork‐ing.Thisprocessincludesdiscoveryandexploration ofknowledgeforsubsequentabsorptionandexploita‐tion[4, 22].Likewise,theknowledgeandinforma‐tionacquiredcanbeusedtoexploitopportunitiesin variousindustriesandmarkets.Seizingcapabilities involvestheef icientexploitationoftheseopportuni‐ties,providingacompetitiveadvantagebycapitaliz‐ingonemergingtrendsandadvancements[6].Trans‐formationcapabilitiesarevitalforlong‐termcom‐petitiveness,astheyalloworganizationstoadaptby recon iguringresourcesandprocesses[6].Transfor‐mationprocessenablestheuseofknowledgeinthe formofinnovation,transfer,orexploitationthatis appropriatefortheorganization[4].Indeed,ithigh‐lightstheimportanceofhavingstrongleverageand transformationcapabilitiestoachievesustainedcom‐petitiveadvantage[3].Thus,thesemicrofoundations canbeunderstoodasastagedmodelwithasignif‐icantinterdependencebetweenitselementsforits developmentinorganizations[23–25].Eachstageis crucialforthedevelopmentofinnovationcapabilities inorganizations.Inthatsense:
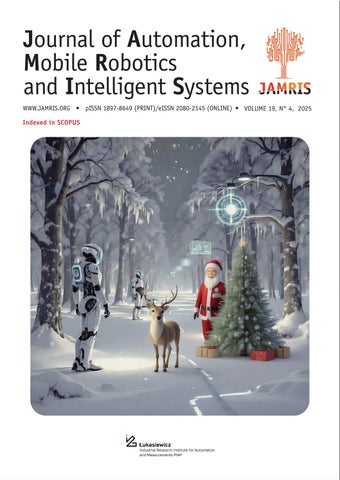
H1a:TheSensingcapacityisthedeterminingfac‐torfortheexistenceofaseizingcapacity.
H1b:Seizingcapacitiesareadeterminingfactorfor theexistenceoftransformativecapacities.
2.2.1.BusinessModelInnovation
Thebusinessmodeliscriticaltothedynamicabil‐ityofanorganizationtoadaptandsucceedinanever‐changingenvironment,anditssigni icanceliesinthe strategicpositioningoftheorganizationwithinthe valuechain[6],re lectingchangesinthefundamental elementsandarchitecturalframeworkofthebusiness model[14].Businessmodelinnovationentailslever‐aginginternalandexternalresourcesandcapabilities tocreatevalue,delivernewproposalsfor irm’sseg‐ments,andgeneratesustainablepro its,ensuringthat revenuecoverscosts[26].Thisinnovationprocess mayfollowasequentialtrajectory,markedbydistinct featuresfortransitioningfromonestagetothenext [23–25].
Notably,businessmodelinnovationcanmanifest invariousdimensions,includingshiftsinindustry mindset,alterationsinthedeliveryofvalue,andadap‐tationsintheconditionsforcapturingvalue[23].In essence,businessmodelinnovationinvolvestheinte‐grationofthethreevaluedomainstocreateinnova‐tion,deliverproducts,services,technology,andinfor‐mation lowsofycapturevalueinagrowthcycle[26]. Inthatsense:
H3a:Innovationincreatingvalueiscriticaltoinno‐vatingindeliveringvalue,
H3b:Innovationindeliveringvalueiscriticalto innovatingincapturingvalue.
2.2.2.SensingandValueCreationCapabilities
Identifyingbusinessopportunitiesthatarisefrom marketandindustrytrendsiscrucialforbusiness modelinnovation.Theabilitytosensetheseoppor‐tunitiesisessentialforadaptingtoadynamicenvi‐ronment[24,27].Toidentifynewopportunities,orga‐nizationsshouldengageinexploration,creation,and learningactivitiesthatenablethemtoanticipateand identifykeyenvironmentalsignals[23].Thesesignals willenablegreater lexibilityinadaptingandcontin‐uouslyrenewingtheorganization’sunderlyingbusi‐nessmodel[28].Valuecreationnecessitatescontinu‐ousobservationoftheenvironmentbeyondthecur‐rentcustomer.Itiscrucialtopossessanexploratory capabilitythatcanidentifyopportunities[26]togain abetterunderstandingofopportunitiesandthreats [29].Tocomprehendthesigni icanceofintegrating newknowledgewiththeorganization’scapabilitiesto createculturalandeconomicvalue,aconvergentview oftheorganizationisessential.Kianietal.[30]argue thatintegratinginadynamicenvironmentiscrucial foranorganization’ssuccess.Inthatsense:
H2a:Sensingcapabilitiesin luenceinnovationin thevaluechainofagriculturalorganizations.
2.2.3.SeizingCapabilitiesandValueDelivery
Duringtheseizingstage,organizationsaimto recombinetheirtechnology,resources,knowledge, andmarkettotakeadvantageofemergingopportuni‐ties.Theseopportunitiestypicallymanifestaschanges intheorganization’svaluedelivery,suchasnewprod‐ucts,processes,orservices.However,tomaintainand improvetechnologicalcompetencies,itisnecessary toinvestindesignandprocesses,striveforqual‐ityimprovement,andmakenecessaryinvestmentsto gainmarketacceptance[2].Thistypeofchangeoften generatestensions,soitisimportanttopossessskills tomanageexpectationsandfosteracceptanceand buy‐ininthefaceofdefensiveattitudesthatmayarise duringtheprocess[23].Changestothevaluedeliv‐eryarecrucialastheydirectlyimpactthesolutions offeredtocustomersandhowtheyarepresented.Itis essentialforanorganization’ssuccessinscalingnew productsandservicesandenhancingthecustomer offeringtoincorporateseizingcapabilities[26, 30]. Thus,therenewalprocesscannotbecompletedsolely withtheexistingresourcebase.
Totakeadvantageofmarketopportunities,itis recommendedtodevelopnewcapabilities,createa differentoffering,andfosteraculturethatreduces resistancetochangeduringthetransitionperiod[24]. Keyelementsforsuccessaredeliveringvalueand innovation.Inthatsense:
H2b:Seizingcapacityin luencesinnovationinthe valuedeliveryofagriculturalorganizations.
2.2.4.TransformationandValueCaptureCapabilities Transformationalcapacityisessentialforachiev‐ingsustainabilityandiscloselylinkedtosustaining thenewbusinessmodel.Itenablestheorganization toshareitsknowledgewiththeoutsideworldto reapbene its[31].Thiscapabilityisconsideredthe inalstageintheprocessofstructuralinnovationand sustainabilityofthebusinessmodel[25].Ensuring sustainableperformancerequiresunderstandinghow irmsgeneratecost‐coveringrevenuesandpro its [26].Valuecaptureinvolvesnotonlysettingpricesbut alsoconsideringfactorssuchastimingandeffective‐ness,whichcanimpactcustomerinteractionsandthe sustainabilityofavalue‐basedpricingstrategy[32]. Hence,theabilitytorecombinecapabilitiesandadapt tochangeiscrucialinsupportingthenewbusiness modelwithexistingresources,organizationaldesign, andculture[23].Inthatsense:
H2c:Transformationcapacityin luencesinnova‐tioninvaluecapturebyagriculturalorganizations. Oncethehypothesesofthetheoreticalmodelhave beenpresented,theyareconsolidatedinFigure1:
Thepaperanalyzesnumericaldatatotest hypothesesthatsupporttheproposedtheoretical modelforidentifyingthedeterminantsofinnovation capabilitiesinbusinessmodelsoffarming organizations.ThePLS‐PMmethodisutilizedto estimatetherelationshipcoef icientsandvalidate thehypotheses.Thismethodisdevelopedintwo stages,allowingforcreatingindicesassociatedwith unobservabletheoreticalvariablesandestablishing theirstatisticalrelationships.
Asampleof65agriculturalorganizationspar‐ticipatingintheProductiveAlliancesProgrammeof theMinistryofAgricultureandRuralDevelopment inBoyacá‐Colombiaisconsidered.Theinformation collectionwascarriedoutduringJanuaryandFebru‐ary2023,wherevisitsweremadedirectlytothe companies’establishments,andevenwhentheman‐agerswereabsent,appointmentsweremadewith themtoapplytheinstrumentonanotherdate.The UniversidadPedagogicayTecnologicadeColombia (UPTC)EthicsCommitteereviewedthisresearch project,andeachoftheparticipantsreadandsigned theinformedconsentform,agreeingtoparticipate intheresearchprojectanonymously.Thesample wasobtainedthroughsimplerandomsamplingand includedindividualsfrom13provinceswithinthe department.Theprovinceswiththehighestpar‐ticipationrateswereTundama(18.5%),Occidente (16.9%),Centro(15.4%),andSugamuxi(12.3%)(see Table1).Intermsofeconomicactivities,theorganiza‐tionsmainlyengageinfruittreecultivation(27.7%), cattleandmilkproduction(20%),vegetablefarm‐ing(15.4%),andpotatocultivation(13.8%).Notably, 81.5%oftheorganizationsinthesampleareestab‐lishedasassociations,and70%haveamembershipof 20ormoreindividuals.
3.1.Instrument
Thepurposeofthisstudyistoestablishthecor‐relationbetweenvariablesrelatedtodynamicinno‐vationcapabilitiesandbusinessmodelcapabilities,as illustratedinFigure1.Theinstrumentusedincludes characteristicsrelatedtosixinnovationcapabilities thatareessentialtoadynamicprocess:learningorien‐tation,relationships,strategicdirection,creativecul‐ture,productandservicedevelopmentorimprove‐ment,andadaptabilityuseda5‐pointLikertscale [33].Furthermore,businessmodelinnovationispur‐suedwithafocusoncreatingvaluethroughtechnol‐ogy,processes,andpartnerships.Thevaluedelivered relatestotheinteractionbetweenorganizations,cus‐tomers,andmarkets.Finally,valuecaptureisassessed fromtheperspectiveofresourcemanagementandthe creationofinnovativecostandrevenuestructures. TheseapproachesareshowninTable2
3.2.MethodofEstimation:PartialLeastSquares–Path Modeling(PLS‐PM)
Totestthehypothesesinthetheoreticalframe‐work,weuseStructuralEquationModeling(SEM) methodology.SEMisawidelyusedmultivariateana‐lyticaltoolinscienti icresearchthatcombinesmea‐surablevariableswithunobservedvariablestopro‐ducepreciseresults[16, 49, 50].Theprocessof SEMinvolvestwostages.The irststepinvolves estimatingtheexternalmodeltoestablishrelation‐shipsbetweenlatentvariablesorevaluateassociated indices.Thesubsequentstepinvolvesestimatingthe internalmodeltofocusoncausalityordependence relationships.
Thegoalistovalidateorinvalidateproposed hypothesesbyestimatingtherelationshipcoef icients (Path)usingOrdinaryLeastSquares(OLS)[50–53]. ThisstudyemploysthePLS‐PMmethod,whichuses groupsofobservablevariablestocreateadataset associatedwiththetheoreticalconcept.Tovalidate theconstruct,statisticaltestssuchasCronbach’s AlphaandDillonGoldstein’sRhoareapplied,and parametersareestimatedusingOLS.Thevalidation isachievedthroughstatisticaltestssuchast‐tests andbootstrapping[18,31,49,50,52,53].Toperform thesecalculations,weusedthePLS.PMlibraryinthe Rprogramminglanguage[53].
4.1.ExternalModel
Toevaluatethestatisticalvalidityofthequestions andmeasurementoflatentvariablesintheproposed theoreticalmodel,weperformedaCon irmatoryFac‐torAnalysis(CFA)usingtheinstrument.Theanalysis comprisesfourindicators:Cronbach’sAlpha,which measuresthepercentageofvarianceexplainedby thesetofmanifestvariablesforthelatentvariable [49,54];TheDillonGoldsteinRho,whichdetermines thelevelofvariationamongasetofvariables;and theloadingcoef icient,whichillustratestheexplained varianceofeachmanifestvariableintheinstrument. Furthermore,thecommunality,whichisthesquareof theloadingcoef icient,ishighlycorrelatedwiththe loadingcoef icient(seeTable3).
Toensurethevalidityofquestions,itisnecessary toachieveanoptimalCronbach’sAlphavalueof0.7 orgreater[52].Additionally,anoptimalDillonGold‐stein’sRhovalueshouldbeequaltoorgreaterthan 0.7.Whenvalidatingindividualquestions,itisneces‐sarytohavealoadingof0.7orgreaterandacommu‐nalitygreaterthan0.7,whichindicatesacommunality valueofatleast50%.Table 3 displaystheresultsof theCFAperformedontheblocksofobservablevari‐ables.Theanalysiscon irmsthevalidityandstatistical robustnessoftheobtainedvalues,validatingtherel‐evanceofeachobservablevariableinexplainingthe hypotheses.Thus,theproposedexternalmodelforthe researchiscon irmed.
4.2.InternalModel
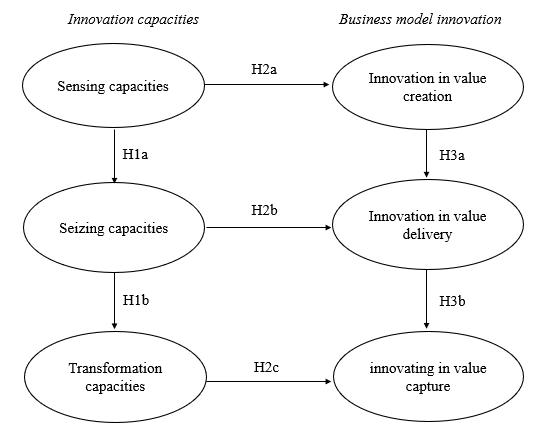
Thissectiondiscussestheassessmentofpath orrelationshipcoef icientsbetweenlatentvariables, includingtheirdirectionandmagnitude.Theesti‐matedeffectsdemonstrateapositivedirection,which supportsthehypothesis(seeTable4).Quotationsare clearlymarked,and illerwordsareavoided.Addi‐tionally,medium‐strongrelationshipsbetweenSens‐ingandSeizingcapabilityareobserved(H1a0.709). Organizationsfacechallengesinobtainingandadapt‐ingtheknowledgerequiredforinnovation[22].To achievegreaterknowledgeappropriationandiden‐tifyopportunitiestogeneratevalue,effectiveprac‐ticesincludeallianceandrelationshipmanagement [24,55].
Table1. Distributionoforganizationsbyprovinceandeconomicactivity
Table2. Theoreticalstructureoftheproposedinstrument
Table3. Evaluationmeasurementresults
Thecorrelationcoef icientof0.633betweenseiz‐ingcapacityandtransformationsuggestsadirectand moderaterelationship(H1b).Intheagriculturalsec‐tor,itisimportanttoestablishinfrastructuresthat facilitatethecreationandre inementofproductsor services.Thisrequirescooperativenetworkstoassim‐ilateessentialknowledgenecessaryforcollaborative innovation[37,44].
Asigni icantassociationwasfoundbetween sensingandvaluegeneration(H2a0.735). Sensinginvolvesinvestigating,producing,and acquiringknowledgetoanticipateandrecognize environmentalcuesthatenablebetterunderstanding ofopportunitiesandthreats[23].Additionally, buildingandmaintainingprofessionalrelationships isacrucialfactorincreatingvalue.Thiscapability allowsorganizations,particularlythosewithlimited resourcesandtechnicalexpertise,todiscoverand accessnewideas,technologies,processes,projects, resources,contacts,andproductsorservices[12].
Table4. Resultsandvalidationofhypotheses Hypotheses
Theresultsindicatemoderaterelationships,such asthecorrelationbetweentheseizingvariableand innovationinvaluedelivery(H2b).Toencouragecol‐lectiveaction,agriculturalorganizationsshouldprior‐itizethedevelopmentof lexibleorganizationalpro‐cessesandcommunicationmechanismstoimprove theirproductionsystems.Incorporatingcultureinto innovationstrategiesiscrucialforaddressingprocess inef icienciesandfacilitatingchangetotakerisks[12, 40,56].
Thecorrelationbetweenvaluecreationandvalue delivery(H3a0.462)suggeststhatestablishingcon‐nectionswithvariousstakeholdersfacilitatescollab‐orativeknowledgegeneration[45].Internalpartner‐shipshavebeendemonstratedtobecriticalfororgani‐zations.However,asorganizationsexpandandpros‐per,newemployeesfacesigni icantobstaclesdue totheresultingincreaseinthecomplexityoftheir workscenarios.This indingsupportsthathigherlev‐elsoforganizationalcomplexityareassociatedwith increasedintensityandimprovedqualityofinterac‐tions.
Intermsofinnovationinvaluedeliveryand valuecapture(H3b0.572),adirectrelationshipexists withthebusinessmodelthatenableshigherreturns. However,bene itsarenotlimitedtocommercializa‐tion.Effectivemanagementofexternalresourcesthat alignswithsocio‐entrepreneurialempowermentis alsocrucial.Valuecaptureheavilyreliesonfavorable policiesandinstitutionalarrangementsthatsupport collectiveaction[57].
H2cwasrejected(0.204),indicatingnocorrelation betweentransformationcapacityandvaluecapture. Thisoutcomemaybeattributedtoorganizationalfac‐tors,speci icallythecomplexityofdecision‐making processeswithinboardsthatrequiretheparticipation ofallmembers,ultimatelylimitingadaptability.Addi‐tionally,theseorganizationshavebotheconomicand socialobjectives,whichcouldleadtoadifferentinter‐pretationofthevaluecaptureprocess[23].Thestudy foundthat43%ofparticipantsdidnotparticipate injointmarketingactivities.Instead,theyreceived alternativebene itssuchasknowledge,relationships, status,orvisibility.Figure 2 showsthevalidationof theproposedtheoreticalmodelandtherelationship coef icients.
Hypotheses
Validated***
Validated***
Validated***
Thereisadirectcorrelationbetweenanorgani‐zation’ssensingandseizingcapabilitiesanditsabil‐itytoinnovate,bothinthedeliveryandcreationof value.Thesecapabilitiesenable irmstoidentifynew ideasandresources,receivetrainingandtechnical assistance,anddevelopstrategiesforgreaterbargain‐ingpower.However,thereisnoclearrelationship betweenanorganization’stransformationalcapabili‐tiesanditsabilitytocapturevalue.Thereisasigni i‐cantneedtodevelopskillsthatfacilitatetheenhance‐mentandcreationofproductstoestablisharobust valueproposition.
Thisresearchdelvesintotheintricaterelationship betweeninnovationcapabilitiesandtheevolutionof thebusinessmodelinagriculturalorganizationsin Boyacá,Colombia.TheRBVperspectiveunderscores thesigni icanceofinternalfactorsforcompetitive‐ness,emphasizinginnovationasadynamicprocess capableofleveragingknowledgetofosterorganiza‐tionaladaptability[4,14].
ThestudyconductedbyKianietal.[30]shows asigni icantcorrelationbetweeninnovation,sensing, andseizingcapabilities.Thisemphasizestheimpor‐tanceofcontinuouslearningandeffectiveknowledge management,whicharecrucialforfarmingorganiza‐tions.Theprocessofdetectingandadaptingknowl‐edgecloselyalignswiththeuseoftechnologiesin theproductionsystem.However,organizationsfacea challengeinassimilatingknowledgetomobilizethe necessarytechnicalandeconomicsupportforinnova‐tion[22].
Alliancemanagementisarecurringandeffec‐tivepracticeforacquiringandadaptingknowledge [55].Theabilitytobuildrelationshipsisessentialfor identifyingopportunitiesandinvolvinggovernmental, private,ornon‐pro itactorsinanopeninnovation approach[39].Constructingnetworksthatinvolve diverseactorsisawaytoabsorbexternalknowledge andexposetheorganizationtonewstimuliandexpe‐riences.Duringtheseizingstage,itiscrucialtohigh‐lighttheimportanceofstrategicdirectionandaddress anyculturalchallengesthatmayhinderthepercep‐tionoflessonslearnedasopportunitiesforinnovation [8].Organizationalcultureplaysacriticalroleinthe innovationstrategy,aslessonslearneddonotalways translateintoopportunitiesforfurtherlearningand experimentation.Thetransformationstageshowsa directandmoderaterelationship,highlightingthe importanceofdevelopinginnovationcapabilitiesfor productsandservices[45].Intheagriculturalcontext, cooperativenetworksemphasizeco‐creationascru‐cialforproductdevelopment,representingatangible manifestationofinnovation[44].Inthe ieldofbusi‐nessmodelinnovation,thereisamoderatecorrelation betweenvaluecreationandvalueproposition.Effec‐tiverelationshipmanagementwithstakeholdersfrom boththepublicandprivatesectors,aswellasinternal collaborationsamongteammembers,iscrucial.How‐ever,thesecollaborationsoftenencounterchallenges thatcanraiseentrybarrierswithinorganizationsand complicatecoordination.
Therelationshipbetweensensingcapabilitiesand innovationinvaluecreationissigni icant,highlighting thecomplementaritybetweentheseconcepts.Sensing capabilitiesplayacrucialroleinexploring,creating, andlearningtoanticipateanddetectenvironmental signals.Relationship‐buildingisalsofundamentalfor organizationswithlimitedresources.Althoughagri‐culturalorganizationsgeneratevaluethroughexter‐nalproductsandservices,itisimportanttohighlight theirroleinstrengtheninginternalbondswithasso‐ciates,ortheirsocialcapital.Therelationshipbetween seizingcapabilitiesandinnovationinthevaluepropo‐sitionisdirectandmoderate,underscoringtheneed for lexibleorganizationalprocessesandtheincorpo‐rationofcultureintotheinnovationstrategy.There isnoclearrelationshipbetweentransformationcapa‐bilitiesandvaluecapture.Thislackofcorrelationcan beattributedtothefactthatparticipatingorganiza‐tionsarerelativelyyoungandfocusedonimmediate growth,whichexplainsthelowsigni icanceoftrans‐formationcapabilities.Thedualpurposeofagricul‐turalorganizations,whichpursuebotheconomicand socialobjectives,createsdivergencesinvaluecap‐ture.Furthermore,thelimitedcontroloverproduction costsrestrictstheimpactoftransformationcapabili‐tiesinthisaspect.
However,itispossibletocapturevaluethrough thesensingprocessbycreatingproposalsthatalign withtheneedsofbothinternalandexternalclients.In conclusion,thisresearchhighlightstheimportanceof improvinginnovationcapabilitiesthroughcontinuous learning,effectiveknowledgemanagement,external collaboration,andaninnovationstrategythatcon‐sidersbothculturalandeconomicaspects.Internal andexternalcollaboration,alongwithdiversi ication oftheproductoffering,emergeaskeyelementsfor thesuccessofagriculturalorganizationsinthiscon‐text[24].Futureresearchshouldthoroughlyexplore thedynamicsoftransformationcapabilitiesinmore matureorganizationsandenvironments.Additionally, ananalysisofthespeci icimpactofdivergencesin economicandsocialobjectivesonvaluecaptureissug‐gested.Theseareascouldprovidevaluableinsightsto furtheradvancethe ieldofstudy.
Thestudyusesthedynamiccapabilitiesframe‐worktoidentifyinnovationcapabilitiesinfarming organizationsoperatinginBoyacá,adepartmentin Colombia,andtoestablishtheirrelationshipwith theinnovationelementsinthebusinessmodel.The identi iedinnovationcapabilitiesenableacompre‐hensiveinnovationassessmentacrossvariousdimen‐sions,includinglearningandculture.Therelationship betweeninnovationcapabilitiesandtheelementsof thebusinessmodelofagriculturalorganizationsindi‐catesthatsensingandseizingcapabilitiesaffectthe processesofvaluecreationanddelivery,primarily throughcapabilitiessuchasrelationshipsandlearn‐ing.Sharingknowledgeandexperienceswithexter‐nalactorscanfacilitatethecreationofopeninnova‐tionscenarios,bene itingorganizationswithlimited resourcesandcapabilitiesingeneratingnewideas. However,ithasbeenfoundthattransformationcapa‐bilitiesdonotplayacriticalroleinthevaluecap‐tureprocess.Duetobarriersthathinderthedevel‐opmentofinnovationcapabilities,suchasdiscrepan‐ciesbetweensocialandeconomicgoalsandconvo‐lutedparticipatorystructuresthatobstructdecision‐makingandadaptation,theinnovationprocessmay notplayacrucialroleintheprocessofvaluecapture. Theresearchaimstomeasureinnovationand identifyinnovativecapacitiesinrural,peasant,and associativeworkcontexts.Theseareasoftenfacechal‐lengesandshortcomingsindevelopingpro itableeco‐nomicactivities.Theinformationobtainedcanassist decision‐makersandactorsoftheNationalAgricul‐turalInnovationSystem(NAIS)inpromotinginnova‐tion.These indingscanaideconomicdevelopment practitionersincraftingstrategiesthatarecongruent withtheirlocales.Additionally,thismethodologymay beespeciallybene icialforruralareasthathavenot yetfullyintegratedintotheglobaleconomy.
Theprimarylimitationofthisstudyisitsnar‐rowfocusonaspeci icregioninColombia,withan emphasisonagricultureandlivestock.Therefore,itis recommendedthatfutureresearchinvestigateother contextstosupplementthese indings.Toadvance researchinthisarea,itisrecommendedthatefforts focusondevelopingstrategiesthatpromotetrans‐formationalcapabilitiestoachievesustainabilityand competitiveadvantage.
AUTHORS
DanielaNiño-Amezquita∗ –FacultyofEconomics andAdministrativeSciences,UniversidadCatólicade laSantísimaConcepción,Concepción,Chile,e‐mail: dnino@doctorado.ucsc.cl.
JhancarlosGutiérrez-Ayala –FacultaddeCiencias EconómicasyAdministrativas,UniversidadPedagóg‐icayTecnológicadeColombia,Av.CentraldelNorte, 39‐115,150001,Tunja,Colombia,e‐mail:jhancar‐los.gutierrez@uptc.edu.co.
DianaMaríaDueñasQuintero –CentroRegionalde GestiónparalaProductividadylaInnovacióndeBoy‐acá(CREPIB),Av.CentraldelNorte,39‐115,150001, Tunja,Colombia,e‐mail:diana.duenas@crepib.org.co.
FabioBlanco-Mesa –FacultaddeCiencias EconómicasyAdministrativas,Universidad PedagógicayTecnológicadeColombia,Av.Central delNorte,39‐115,150001,Tunja,Colombia,e‐mail: fabio.blanco01@uptc.edu.co.
EduardoCovarrubias-Audelo –EscuelaNormalde Sinaloa,BlvdManuelJ.ClouthierS/N,Col.Liber‐tad,C.P80180,Culiacán,Sinaloa,México,e‐mail: eduardoaudelo8@gmail.com.
∗Correspondingauthor
ThisprojectwassupportedbyMinisteriodeCiencia, TecnologíaeInnovación,MincienciasandUniversidad PedagógicayTecnológicadeColombia75878.Also, ResearchsupportedbyRedSistemasInteligentesy ExpertosModelosComputacionalesIberoamericanos (SIEMCI),projectnumber522RT0130inPrograma IberoamericanodeCienciayTecnologíaparaelDesar‐rollo(CYTED).
Wedeclarethatthedatacollectedinthisresearch areunderprotectionasdeterminedbytheethicscom‐mitteeforresearchoftheUniversidadPedagógica yTecnologíadeColombia(UPTC)andwillonlybe shareduponrequesttosaidcommitteethroughthe emailcomite.eticainvestigacion@uptc.edu.co
[1] L.Achtenhagen,L.Melin,andL.Naldi,“Dynamics ofBusinessModels‐Strategizing,CriticalCapa‐bilitiesandActivitiesforSustainedValueCre‐ation,” LongRangePlanning,vol.46,no.6,2013, pp.427–442;https://doi.org/10.1016/j.lrp.20 13.04.002
[2] V.G.Alfaro‐García,A.M.Gil‐Lafuente,andG.G. AlfaroCalderón,“AFuzzyMethodologyforInno‐vationManagementMeasurement,” Kybernetes, vol.46,no.1,2017,pp.50‐66;https://doi.org/ 10.1108/K‐06‐2016‐0153
[3] K.AmofahandR.Saladrigues,“ImpactofAttitude towardsEntrepreneurshipEducationandRole ModelsonEntrepreneurialIntention,” Journalof InnovationandEntrepreneurship,vol.11,no.1, 2022;https://doi.org/10.1186/s13731‐022‐00197‐5
[4] C.Baden‐FullerandS.Hae liger,“BusinessMod‐elsandTechnologicalInnovation.” LongRange Planning,vol.46,no.6,2013,pp.419‐426.
[5] J.Barney“FirmResourcesandSustainedCom‐petitiveAdvantage,” JournalofManagement,vol. 17,no.1,1991,pp.99‐120.
[6] J.B.Barney,“Resource‐BasedTheoriesofCom‐petitiveAdvantage:ATen‐YearRetrospectiveon theResource‐BasedView,” JournalofManagement,vol.27,no.6,2001,pp.643‐650.
[7] M.E.ABarreraandH.Gutiérrez,“Desigualdad deGéneroyCambiosSociodemográ icosen México,” Nóesis:RevistadeCienciasSocialesy Humanidades,vol.26,no.51,2017,pp.2‐19.
[8] M.I.Barrettetal., BeingInnovativeAboutServiceInnovation:Service,DesignandDigitalization,ICIS,2012.
[9] M.T.Bastanchury‐Lópezetal.,“Reviewofthe MeasurementofDynamicCapacities:AProposal ofIndicatorsfortheSheepin,” CienciayTecnologíaAgropecuaria,vol.20,no.2,2019,pp. 355‐386.
[10] C.Battistellaetal.,“CultivatingBusinessModel AgilitythroughFocusedCapabilities:AMultiple CaseStudy,” JournalofBusinessResearch,vol. 73, 2017,pp.65‐82.
[11] S.Behnam,R.Cagliano,andM.Grijalvo,“How ShouldFirmsReconciletheirOpenInnovation CapabilitiesforIncorporatingExternalActorsin InnovationsAimedatSustainableDevelopment,” JournalofCleanerProduction,vol.170,2018,pp. 950‐965.
[12] B.Bestetal.,“MissionorMargin?UsingDynamic CapabilitiestoManageTensionsinSocialPur‐poseOrganisations’BusinessModelInnovation,” JournalofBusinessResearch,vol.125,2021,pp. 643‐657.
[13] J.BjörkdahlandS.Börjesson,“AssessingFirm CapabilitiesforInnovation,” InternationalJournalofKnowledgeManagementStudies,vol.5,no. 1‐2,2012,pp.171‐184.
[14] F.Blanco‐Mesaetal.,“MedicióndelasCapaci‐dadesdeInnovaciónenTresSectoresPrimarios enColombia,” EfectosOlvidadosdelasCapacidadesdeInnovacióndelaQuínoa,laGuayabay ApícolaenBoyacáySantander,RealAcademiade CienciasEconómicasyFinancieras,2019.
[15] N.Bockenetal.,“TheFront‐EndofEco‐InnovationforEco‐InnovativeSmallandMedium SizedCompanies,” JournalofEngineeringand TechnologyManagement,2014,vol.31,pp. 43‐57.
[16] M.Castillo‐VergaraandE.TorresAranibar,“El PapeldelaCooperaciónparaDesarrollarInno‐vaciónTecnológicaenlaPYME,” JournalofTechnologyManagementandInnovation,vol.14,no. 4,2019,pp.41‐53.
[17] J.CepedaandJ.Arias‐Pérez,“InformationTech‐nologyCapabilitiesandOrganizationalAgility: TheMediatingEffectsofOpenInnovationCapa‐bilities,” MultinationalBusinessReview,vol.27, no.2,2019,pp.198‐216.
[18] W.W.Chin,“ThePartialLeastSquaresApproach toStructuralEquationModeling,” ModernMethodsforBusinessResearch,vol.295,no.2,1998, pp.295‐336.
[19] U.R.Christaetal.,“TheRoleofValueInnovation CapabilitiesintheIn luenceofMarketOrienta‐tionandSocialCapitaltoImprovingthePerfor‐manceofCentralKalimantanBankinIndonesia,” JournalofOpenInnovation:Technology,Market, andComplexity,vol.6,no.4,2020,pp.140.
[20] T.Clauss,“MeasuringBusinessModelInnova‐tion:Conceptualization,ScaleDevelopment,and ProofofPerformance,” R&DManagement,vol.47, no.3,2017,pp.385‐403.
[21] A.R.Cummings,“ConstruyendoCapacidades deInnovaciónenIniciativasAsociativas dePequeñasAgroindustriasRuralesenEl Salvador,” RevistaIberoamericanadeCiencia TecnologíaySociedad,vol.8,no.24,2013,pp. 295‐319.
[22] M.DeSilva,O.Al‐Tabbaa,andZ.Khan,“Business ModelInnovationbyInternationalSocialPur‐poseOrganizations:TheRoleofDynamicCapa‐bilities,” JournalofBusinessResearch,vol.125, 2021,pp.733‐749.
[23] M.J.Donate,I.Peña,andJ.D.SanchezdePablo, “HRMPracticesforHumanandSocialCapi‐talDevelopment:EffectsonInnovationCapa‐bilities,” TheInternationalJournalofHuman ResourceManagement,vol.27,no.9,2016,pp. 928‐953.
[24] H.R.Espinosa,C.J.RGómez,andL.F.R.Betancur, “FactoresDeterminantesdelaSostenibilidadde
lasAgroempresasAsociativasRurales,” Revista deEconomiaeSociologiaRural,vol.56,2018,pp. 107‐122.
[25] J.F.HairJretal.,“PartialLeastSquaresStruc‐turalEquationModeling(PLS‐SEM)AnEmerg‐ingToolinBusinessResearch,” EuropeanBusinessReview,vol.26,no.2,2014,pp.106‐121.
[26] R.FloresandC.Naranjo,“UsodelCapitalSocial enlaGeneracióndeAsociatividadenPequeñas OrganizacionesFamiliaresCampesinas,” Revista deTrabajoSocial,vol.73,2006,pp.99‐109.
[27] N.J.FossandT.Saebi“BusinessModelsandBusi‐nessModelInnovation:BetweenWickedand ParadigmaticProblems,” LongRangePlanning, vol.51,no.1,2018,pp.9‐21.
[28] G.N.FrancesconiandN.Heerink,“Ethiopian AgriculturalCooperativesinanEraofGlobal CommodityExchange:DoesOrganisational FormMatter,” JournalofAfricanEconomies,vol. 20,no.1,2011,pp.153‐177.
[29] I.Freije,A.delaCalle,andJ.V.Ugarte,“Roleof SupplyChainIntegrationintheProductInnova‐tionCapabilityofServitizedManufacturingCom‐panies,” Technovation,vol.118,2022,p.102216.
[30] J.French,K.Montiel,andV.PalmieriReymond, “LaInnovaciónenlaAgricultura:UnProceso ClaveparaelDesarrolloSostenible,” IICA, 2014.
[31] G.D.Garson,“PartialLeastSquares(PLS‐SEM): RegressionandStructuralEquationModels,” NorthCarolina:StatisticalPublishingAssociates, 2016.
[32] J.M.Gil‐León,J.Gutiérrez‐Ayala,andE.A. Ramírez‐Hernández,“ElPapeldelTurismo PatrimonialenelIndicedeCompetitividad TurísticaRegionaldeColombia:UnaEvaluación deLasRelacionesMediantePLS‐PM,” Revista EAN,vol.90,2021,pp.169‐192.
[33] A.González‐Moreno,F.J.Sáez‐Martínez,andC. Díaz‐García,“AttitudestowardsEco‐Innovation intheChemicalIndustry:PerformanceImplica‐tions,” EnvironmentalEngineeringandManagementJournal,vol.13,no.10,2014,pp.2431‐2436.
[34] C.E.HelfatandM.A.Peteraf,“TheDynamic Resource‐BasedView:CapabilityLifecycles,” StrategicManagementJournal,vol.24,no.10, 2003,pp.997‐1010.
[35] J.M.Huesca‐Mariñoetal.,“ElExtensionismoen ProgramasAgrícolasRegionales:PlanPuebla yMasAgro,” Estudiossociales.Revistadealimentacióncontemporáneaydesarrolloregional, vol.29,no.53,2019.
[36] M.N.Kiani,M.Ahmad,andS.H.MGillani“Service InnovationCapabilitiesasthePrecursortoBusi‐nessModelInnovation:AConditionalProcess Analysis,” AsianJournalofTechnologyInnovation, vol.27,no.2,2019,pp.194‐213.
[37] B.LawsonandD.Samson,“DevelopingInno‐vationCapabilityinOrganisations:ADynamic CapabilitiesApproach,” InternationalJournalof InnovationManagement,vol.5,no.3,2001,pp. 377‐400.
[38] U.LichtenthalerandE.Lichtenthaler,“A Capability‐BasedFrameworkforOpen Innovation:ComplementingAbsorptive Capacity,” JournalofManagementStudies, vol.46,no.8,2009,pp.1315‐1338.
[39] H.‐M.LinandC.‐C.Tsai,“ConceptionsofLearning ManagementamongUndergraduateStudentsin Taiwan,” ManagementLearning,vol.39,no.5, 2008,pp.561‐578.
[40] M.MuhicandL.Bengtsson,“DynamicCapabili‐tiesTriggeredbyCloudSourcing:AStage‐Based ModelofBusinessModelInnovation,” Reviewof ManagerialScience,vol.15,no.1,2021,pp.33‐54.
[41] M.Mutenjeetal.,“AgriculturalInnovationsand FoodSecurityinMalawi:GenderDynamics, InstitutionsandMarketImplications,” TechnologicalForecastingandSocialChange,vol.103, 2016,pp.240‐248.
[42] D.Niño‐AmézquitaandD.M.D.Quintero,“Inno‐vationCapabilitiesinBusinessModelsforAgri‐culturalOrganizations:TheoreticalApproaches,” InnovationandSustainabilityinGovernmentsand Companies:APerspectivetotheNewRealities, RiverPublishers,2023,pp.159‐181.
[43] A.OsterwalderandY.Pigneur, Generaciónde modelosdenegocio,2011.
[44] M.E.Porter, CompetitiveAdvantage:Creatingand SustainingSuperiorPerformance,FreePress,vol. 43,1985,p.214.
[45] A.V.PrietoandC.S.Álvarez,“AnálisisdeEvolu‐cióndelaAsistenciaTécnicayelFomentode CooperativasRuralesenColombia,” Cooperativismo&Desarrollo,vol.28,no.116,2020,pp. 1‐22.
[46] R.Ramos‐Sandoval,J.M.G.Álvarez‐Coque,andF. Mas‐Verdú,“InnovativeCapabilitiesofUsersof AgriculturalR&DServices,” RegionalSciencePolicy&Practice,vol.11,no.2,2019,pp.295‐306.
[47] C.P.Ribau,A.C.Moreira,andM.Raposo, “SMEsInnovationCapabilitiesandExport Performance:AnEntrepreneurialOrientation View,” JournalofBusinessEconomicsand Management,vol.18,no.5,2017,pp.920‐934.
[48] V.SachitraandS.‐C.Chong,“Resources,Capa‐bilitiesandCompetitiveAdvantageofMinor ExportCropsFarmsinSriLanka:AnEmpirical Investigation,” CompetitivenessReview:AnInternationalBusinessJournal,vol.28,no.5,2018,pp. 478‐502.
[49] G.Sanchez, PLSPathModelingwithR.,Trowchez Editions,vol.383,2013,p.551.
[50] A.Setyawatietal.,“LocusofControl,Environ‐ment,andSmall‐MediumBusinessPerformance inPilgrimageTourism:TheMediatingRoleof ProductInnovation,” Heliyon,vol.10,no.9,2024.
[51] B.A.Shiferaw,J.Okello,andR.V.Reddy,“Adop‐tionandAdaptationofNaturalResourceMan‐agementInnovationsinSmallholderAgricul‐ture:Re lectionsonKeyLessonsandBestPrac‐tices. Environment,DevelopmentandSustainability,vol.11,2009,pp.601‐619.
[52] D.J.Teece,“ExplicatingDynamicCapabilities: TheNatureandMicrofoundationsof(Sustain‐able)EnterprisePerformance,” StrategicManagementJournal,vol.28,no.13,2007,pp.1319‐1350.
[53] D.J.Teece,“BusinessModels,BusinessStrategy andInnovation,” LongRangePlanning,vol.43, no.2‐3,2010,pp.172‐194.
[54] D.J.Teece,“ADynamicCapabilities‐Based EntrepreneurialTheoryoftheMultinational Enterprise,” TheEclecticParadigm:AFramework forSynthesizingandComparingTheoriesof InternationalBusinessfromDifferentDisciplines orPerspectives,Springer,pp.224‐273.
[55] D.J.Teece,G.Pisano,andA.Shuen,“Dynamic CapabilitiesandStrategicManagement,” StrategicManagementJournal,vol.18,no.7,1997,pp. 509‐533.
[56] J.A.Turneretal.,“UnpackingSystemicInnova‐tionCapacityasStrategicAmbidexterity:How ProjectsDynamicallyCon igureCapabilitiesfor AgriculturalInnovation,” LandUsePolicy,vol.68, 2017,pp.503‐523.
[57] M.G.Velazquez‐Cazaresetal.,“InnovationCapa‐bilitiesMeasurementusingFuzzyMethodolo‐gies:AColombianSMEsCase,” Computational andMathematicalOrganizationTheory,vol.27, 2021,pp.384‐413.
A2‐TUPLELINGUISTICDYNAMICOWAWAAGGREGATIONOPERATORANDITS
A2‐TUPLELINGUISTICDYNAMICOWAWAAGGREGATIONOPERATORANDITS A2‐TUPLELINGUISTICDYNAMICOWAWAAGGREGATIONOPERATORANDITS
Submitted:14th April2024;accepted:17th September2024
YelenyZulueta‑Véliz,CarlosRafaelRodríguezRodríguez,AylinEstradaVelazco DOI:10.14313/jamris‐2025‐032
Abstract:
Alinguisticdynamicdecision‐makingproblemreveals situationsinwhichthedecisiondatagatheredinmulti‐pleperiodsisrepresentedbymeansoflinguisticvalues. Todealwithlinguisticvariablesinlinguisticdynamic decision‐makingproblems,the2‐tuplelinguisticmodel standsoutamongcomputationalmodelsbecauseofits accuracyandinterpretability.Theselectionofasuitable time‐dependent2‐tuplelinguisticaggregationoperator isrelevantduetoitspropertiesthatcanhighlymodifythe computingcostaswellastheresultsthemselvesandtheir accuracyandinterpretability.Thispaperproposesanew 2‐tuplelinguisticdynamichybridweightedaggregation operatorwhichissuitabletomodeldifferentattitudesin decision‐makingbysimultaneouslyweightingthegiven argumentsaswellastheirorderedpositions.Thenovel 2‐tupleLinguisticDynamicOrderedWeightedAveraging‐WeightedAverage(2TDOWAWA)operatorweightsnot onlytheimportanceofaparticulartimeperiod,butalso theimportanceofnon‐dynamicevaluationsinsucha timeperiod.Eventually,a2‐tupleLinguisticDynamicMul‐tipleAttributeDecision‐Makingapproachbasedonthe 2TDOWAWAAggregationOperatorisdescribed.Finallya practicalexampleisprovidedtoillustratethedeveloped approachandtodemonstrateitspracticalityandeffec‐tiveness.
Keywords: linguisticdecision‐making,dynamicdecision‐making,2‐tuplelinguisticmodel,aggregationoperator
Granulationplaysakeyroleinhumancognition. Forhumans,itservesasawayofachievingdatacom‐pression.Thisisoneofthepivotaladvantagesaccru‐ingthroughtheuseofwordsinhuman,machine,and man‐machinecommunication[1].Zadehemphasized twokeynotes[2]:theconceptofgranulationisunique tofuzzylogic[3]andcloselyrelatedtotheconceptof aroughset[4].Granulationinvolvespartitioningaset intogranulesandagranulemaybeinterpretedasa restrictiononthevaluesthatavariablecantakes.In thissense,wordsinanaturallanguageare,inlarge measure,labelsofgranules.
Sincealinguisticvariableisavariablewhoseval‐uesarewordsor,equivalently,granules,theconcept ofgranulationisrootedintheconceptoflinguistic variables[5].
Ingeneralsense,by”informationgranule”,one regardsacollectionofelementsdrawntogetherby theircloseness(resemblance,proximityorfunctional‐ity)articulatedintermsofsomeusefulspatial,tempo‐ralorfunctionalrelationships.Whenwedecompose anuncertaindecision‐makingproblemintogranules, temporalrelationshipsareveryimportanttofocuson themostsuitablelevelofdetail.
Asdecisionenvironmentsandcontentsbecome increasinglycomplex,theuseofsingle‐granule informationalonefailstoaccuratelydescribe dynamic,ambiguousandfragmentarycognitive information.Dynamicmulti‐attributedecision‐makingframeworksoffertodecision‐makersaway ofdealingwithuncertainty,sincethiskindofsolution enablesforaniterativeandinteractiveprocessin whichthedecisioninformationisusuallycollected fromdifferentperiod[6–9].Thatis,thedynamic decision‐makingproblemconsistsofselectingthe bestalternativesfromasetofavailableonesbut consideringtimegranulation[10].Dynamicmulti‐attributedecision‐makingapproachesareimplicitly granule‐basedbecausetheygenerallymodela dynamicproblemasacollectionofstaticdecision‐makingproblemsthataresolved irstandthentheir resultsareaggregatedusingadynamicweighted aggregationoperatoranditsweightingvector.
Theconceptofthelinguisticdynamicmulti‐attributedecision‐making(LDMADM)problem revealssituationsinwhichdecisiondatagatheredin multipleperiods,whichisrepresentedbylinguistic termsbymeansoflinguisticvariables.
Withagranulebeingacollectionofelements whicharedrawntogetherbyequivalence,proximity, similarityorfunctionality,intheLDMADMprocess, uncertaintyismanagedinthesetwogranule‐based dimensions:(a)linguisticvariablesand(b)timeperi‐ods.Let’sgetintothetwofoldcomplexityinbrief.
Todealwith(a)linguisticvariablesinLDMADM, the2‐tuplelinguisticrepresentationmodel[11]pro‐videsapowerfulapproachbecauseitcanexpressany countingofinformationinthediscourseuniverse; meanwhile,itimprovestheinterpretabilityandeffec‐tivenessofthedecision‐makingresultsbyavoiding losinginformationincomputations.Studiesof2‐tuple linguisticrepresentationmodelnotonlyhaveastrong theoreticalresearchvalue,butalsohavewideappli‐cationprospectsinpractice,speci icallyindecision‐makinganddecisionanalysis.
Todealwith(b)timeperiodsinLDMADM,theres‐olutionprocesshasbeenstructuredin[12].Theselec‐tionofasuitabletime‐dependentlinguisticaggrega‐tionoperator,anditsweightingvectorifnecessary,is akeyelementduetothepropertiesthatcanhighly modifythecomputingcostaswellasresultsthem‐selvesandtheiraccuracyandinterpretability.The aggregationisamulti‐stepprocess: irst,acollective assessmentiscalculatedforeachalternativeforeach period,i.e.,eachstaticproblemissolved;second,a dynamiccollectiveassessmentforeachalternativeis calculatedusingvaluesobtainedpreviously,i.e.,the generaldynamicproblemissolvedandanoverall resultisobtained.
Thisdynamicaggregationisgenerallycarriedout usingtime‐dependentaggregationoperatorsconsid‐eringthediversein luenceoftimeperiodsinresults bymeansofweightingvectors.Basedontheabove reviews,wefacetheneedofproper2‐tuplelinguis‐ticaggregationoperatorsforsuchatime‐dependent aggregationprocess.
Whatkindof2‐tuplelinguistictime‐dependent aggregationoperatorsareavailableintheliterature? Asfarasweknows,the2‐tuplelinguisticDynamic WeightedAveraging(2TDWA)[14],the2‐tuplelin‐guisticDynamicAveraging(2TDA)[14],the2‐tuple linguisticDynamicWeightedGeometric(2TDWG)[15] andthe2‐tuplelinguisticDynamicGeometric(2TDG) [15]aggregationoperatorsonlyweightthe2‐tuple linguisticargumentsthemselves.Thatis,theyweight eachtimeperiodinrelationtotheirreliabilitybut theycannotsyntheticallyconsidertheimportance oftimeperiodsandtheimportanceofnon‐dynamic evaluations.
Whatkindofhybridweightedaggregationoper‐atorsareavailableintheliterature?Numericaggre‐gationoperatorshavebeenstudiedforalongtime. Amongthelargenumberofaggregationoperatorsand functions,thearithmeticmean(AM)andtheweighted mean(WM)arethemostpopularones.Arelatedoper‐ator,theorderedweightedaveraging(OWA)operator, wasproposedbyYagerin[16].Thisoperatorissimilar totheWMasbotharealinearcombinationoftheinput data.ThedifferencebetweentheWMandtheOWA operatoristhatthelatterordersthedatabeforeapply‐ingthelinearcombination[17].Thisorderingstep causesthesemantics(ormeaning)oftheweightstobe radicallydifferentintheweightedmeanandtheOWA. Infact,theweightsintheweightedmeanmeasurethe reliabilityofthesourcesandtheweightsintheOWA measuretheimportanceofthevalues(withrespectto theirordering).Theneedofcombiningbothfunctions hasbeendevelopedbydifferentauthors[18,19]and threemainclassesoffunctionshavebeenproposed forgeneralizingthem:theweightedOWA(WOWA) operator[18],thehybridweightedaveraging(HWA) operator[19],andtheorderedweightedaveraging‐weightedaverage(OWAWA)operator[20].Themain advantageofthelastapproachisthatituni iesthe OWAandtheWA,takingintoaccountthedegreeof importancethateachconcepthasintheformulation.
Motivatedbythisgap,inthispaper,wepropose anew2‐tuplelinguisticdynamichybridweighted aggregationoperatorwhichisusefultomodeldif‐ferentattitudesindecision‐makingbysimultane‐ouslyweightingthegivenargumentsaswellastheir orderedpositions.
Theremainderofthispaperisstructuredasfol‐lows.Section2reviewsbasicconceptsofthe2‐tuple linguisticrepresentationmodel.Section3introduces anew2‐tuplelinguisticOWAWAaggregationoperator whichisintegratedinthe2‐tupleLDMADMapproach describedinSection 4.Section 5 givesanillustrative example,andSection 6 summarizesthekey indings ofthisresearch.
2.Preliminaries
Thissectionrevisesconceptsandmethodstobe referredtointhispaper,includingthe2‐tuplelinguis‐ticrepresentationmodelanditscomputationalmodel.
2.1.2‐tupleLinguisticRepresentationModel
In[11],HerreraandMartínezprogressedthefuzzy linguisticdecision‐making ieldbyrepresentingthe linguisticinformationwiththename2‐tuple,con‐structedbyalinguistictermandanumericalvalue, supportingtheinformationofthesymbolictransla‐tion.
The2‐tuplelinguisticmodel[11]aimedtoimprove theaccuracyandfacilitatetheprocessesofcomputing withwordsbytreatingthelinguisticdomainascon‐tinuousbutkeepingthelinguisticbasis(syntaxand semantics).The2‐tuplefuzzylinguisticrepresenta‐tionmodelconsistsofmodellingthelinguisticinfor‐mationbymeansofapairofelements[21]:
‐ Let ��={��0,...,����} bealinguistictermde inedby thefuzzylinguisticapproachwhosesemantics(pro‐videdbyafuzzymembershipfunction)andsyntax arealsode inedaccordingtothefuzzylinguistic approach.
‐ �� isanumericalvalue, SymbolicTranslation,that indicatesthetranslationofthefuzzymembership functionwhichrepresentstheclosestterm, ���� ∈ {��0,...,����}if���� doesnotmatchexactlythecomputed linguisticinformation.Thevalueof��isthende ined as
[−0.5,0.5)�������� ∈{��1,��2,...,����−1} [0,0.5)�������� =��0 [−0.5,0)�������� =���� (1)
Thelinguisticinformationisthenexpressedbya pairofelementsnotedas (����,��).Asymboliccompu‐tationonlinguistictermsin �� obtainsavalue ��∈ [0,��] thatwillbetransformedintoaequivalent2‐tuplelinguisticvalue,(����,��),bymeansoftheΔfunc‐tionde inedasfollows:
De inition1 [21]Let ��={��0,...,����} thesetoflinguisticterms,theassociated2-tupleis ��=��×[−0.5,0.5) andthebijectivefunction Δ∶[0,��]→�� isgivenby:
����, ��=����������(��) ��=��−��,��∈[−0.5,0.5) (2)
with ���������� assignsto �� theintegernumber ��∈ {0,1,...,��} closestto ��
The Δ and Δ−1 transformationfunctionssupport conversionsbetweennumericalvaluesand2‐tuple linguisticvalueswithoutinformationloss.The2‐tuple linguisticmodelonlyguaranteesaccuracywhendeal‐ingwithauniformlyandsymmetricallydistributed linguistictermset.
Therecenttwodecadeshavewitnessedtheboom‐inginterestandgrowingdevelopmentinresearchof 2‐tuplelinguistictime‐independentaggregationoper‐ators.FunctionsΔandΔ−1 greatlyhelptheextension ofconventionalnumericaloperatorstothe2‐tuplelin‐guisticdomain.Inwhatfollows,twoseminal2‐tuple linguistictimeindependentaggregationoperatorsare revised.
De inition2 [11]Let ��={(��1,��1),...,(����,����)} bea setof2-tuplelinguisticvalues,and ��=(��1,...,����), ���� ∈[0,1] beaweightingvectorsuchthat ∑�� ��=1 ���� =1, theweightedaveragingaggregationoperatorassociatedwith �� isthefunction2TWA: ���� →�� de inedas:
(��)=Δ �� ��=1
) (3)
Especially,if ��={ 1 �� , 1 �� ,..., 1 ��},the2TWAoperator reducestothe2-tuplearithmeticmean(2TAM)operator:
2TAM(��)=Δ 1 �� �� ��=1 Δ−1(��
) (4)
2.2.Discretetime2‐tuplelinguisticvariable
Thesigni icantcharacteristicofthe2‐tuplelin‐guisticvariableisthatitinvolvesthedimensionof time,andthisconceptispivotalinunderstanding2‐tupleLDMADMproblems.
De inition3 [10]Let �� bethevariableoftime,then ��(��) iscalledadiscretetime2-tuplelinguisticvariable where ��(��)=((��1,��1)(��1),...,(����,����)(����)) isacollectionof �� 2-tupleargumentscollectedfrom �� different periods, ��={��1,...,����}.
Operationlawsandpropertiesontheconven‐tional2‐tuplelinguisticvaluealsoholdforthediscrete time2‐tuplelinguisticvariablebecauseifomittingthe parameterofthetime(����),thelatercanbemathemat‐icallytakenastheformer.
Theconceptofdiscretetime2‐tuplelinguistic variableaddressestherepresentationofchangesof experts’assessmentsongivenalternativesoveran attributebutconsidersdifferenttimeperiodsinthe LDMADMprocess.
2.3.2‐tupleDynamicWeightedAggregationOperators
The2‐tuplelinguisticaggregationoperatorsare logicallyrequiredtodevelopthedynamicaggregation phaseintheLDMADMresolutionprocess.Let’sana‐lyzesomeoftheexistingaggregationoperators.
De inition4 [14]Let �� = {(��1,��1)(��1),...,(����,����)(����)} beacollectionof �� 2-tupleargumentscollectedfrom �� different periods, ��={(����)|��∈(1,...,��)},whoseweightsare givenbytheweightingvector ��,thenthefunction 2TDWA ∶���� ⟶�� de inedas
2TDWA(��)=Δ �� ��=1 ��(����)Δ
(5)
iscalleda2-tupleDynamicWeightedAveragingaggregationoperator.
Especially,if ���� ={1 �� , 1 �� ,..., 1 ��},the2TDWAoperatorreducestothe2-tupleDynamicAveraging(2TDA) aggregationoperator:
2TDA(��)=Δ 1 �� �� ��=1 Δ−1(����,����)(��
(6)
De inition5 [22]Let �� = {(��1,��1)(��1),...,(����,����)(����)} beacollectionof �� 2-tupleargumentscollectedfrom �� differentperiods, ��={(����)|��∈(1,...,��)} andaweightingvector ��,then thefunction2TDOWA ∶���� ⟶�� de inedas
2TDOWA(��)=Δ
iscalleda2-tupleDynamicOrderedWeightedAveragingaggregationoperator,where (����,����)(����) isthe ��-th largestofthe (����,����)(����) values.
Ontheonehand,inthe2TDWAthe i‐th2‐tuple linguisticvalueisweightedaccordingtotheweight ��(����).Ontheotherhand,in2TDOWAeach ��(����) is attachedtothe i‐thvalueindecreasingorderwithout consideringfromwhichinformationsourcethevalue comes.NoticethattheOWAoperatoriscommutative. Thatis,allinformationsources(orexperts)havean equalcontributiontothe inalsolution.
Thebehaviorofweightedaveragingoperators allowsustoweighteachinformationsourceinrela‐tiontotheirreliabilitywhileorderedweightedoper‐atorsallowtoweightthevaluesaccordingtotheir ordering.
The2TDWA[14,15]operatoronlyweightsthe2‐tupleargumentsthemselves,butignorestheimpor‐tanceoftheorderedpositionofthearguments,while the2TDOWA[22]operatoronlyweightstheordered positionofeachgivenarguments,butignoresthe importanceofthearguments.Tosolvethisdraw‐back,anew2‐tupleaggregationoperatorswillbe de inedfortimedependent2‐tuplelinguisticargu‐ments,whichweightallthegivenargumentsandtheir orderedpositionsbasedonOWAWAoperator[20].
Intherestofthepaper,wewillrecallorintro‐ducede initionsofweightedaggregationoperators. Itisworthnotingthatthesefunctionsarede ined bymeansofvectorswithnon‐negativecomponents whosesumis1.
De inition6 Avector ��∈ R�� isaweightingvectorif ��∈[0,1]�� and ∑�� ��=1 ���� =1
Inthefollowing,��isaweightingvectorde inedon theorderedset,while��isaweightingvectorde ined onthediscretetime2‐tuplelinguisticset,whichis de inedonthetimeperiodset.
De inition7 Let ��(��)={(����,����)(����)|��∈(1,...,��),��∈ (1,...,��)} beacollectionof �� discretetime2-tuplelinguisticargumentson ��,whoseweightsaregivenbythe weightingvector ��={����|��∈(1,...,��)};and ��∈[0,1] Thenthefunction2TDOWAWA ∶���� ⟶�� de inedas 2TDOWAWA��,��(��)=Δ ��
Alongthesameline,wecanintroducetheWAtoa problemformulatedwiththeOWA.
Eachfamilyisjustaparticularcaseusefulinsome specialsituationsaccordingtotheinterestsofthe analysis.
4.A2‐tupleLDMADMApproachbasedonthe 2TDOWAWA��,�� AggregationOperator
Inthissection,aLDMADMApproachwiththe 2TDOWAWA��,�� isgiventointroducehowthisoperator canbeusedtosupportadecision.
Let��={����|��∈(1,...,��)}denotesthediscreteset ofevaluationtimeperiodsand��={����|��∈(1,...,��)} representsthetimeweightingsetthatsatis ies ���� ∈ [0,1]with∑�� ��=1 ���� =1��={����|��∈(1,...,��)},beinga discretesetofalternativeswhichareevaluatedbythe setofexperts ��={����|��∈(1,...,��)} whoseweights aregivenbytheweightingvector ��(����)=(���� ��|��∈ (1,...,��),��∈(1,...,��))
Alternativesareevaluatedaccordingtoacriteria set��={����|��∈(1,...,��)}whoseweightsaregivenby theweightingvector ��(����)=(ℎ�� �� |��∈(1,...,��),��∈ (1,...,��)).
Notethatwealsosupposethatweightsℎ�� �� and���� �� maychangeduringthewholeperiod��.Thepreference providedbyexpert ���� ∈�� aboutalternative ���� ∈ �� accordingtocriterion ���� ∈�� isrepresentedbya linguisticterm��������(����)∈��={��0,...,����}
Then,thedynamicevaluationofalternativesis de inedasadiscretetime2‐tuplelinguisticvariable whosevaluescanbeconsideredasthenon‐dynamic evaluationsgeneratedduringtheperiod ��,sincewe considerthetemporalproblemasasuccessionof �� individualLDMADMproblems.
iscalleda2-tupleLinguisticDynamicOrderedWeighted Averaging–WeightedAverage,2TDOWAWA��,��,aggregationoperator,where (����,����) isthe ��-thlargestofthe weighted2-tuplelinguisticvalues (����,����)(����) values. The �� valuerepresentstherelevanceofeachweighted modelintheaggregation.
Thisformulationofthe 2TDOWAWA��,�� operator separatesthepartthatstrictlyaffectstheOWAoper‐atorandthepartthataffectstheWAoperator.Inthis way,wecanseebothmodelsinthesameformulation.
Bymodulatingthe �� coef icientinthe 2TDOWAWA��,�� operator,wemayconstructdiverse aggregationoperators.If ��=0,thenwegetthe 2TDWAwhileif��=1,wegetthe2TDOWAoperator. Itisalsopossibletoobtainawiderangeofparticular 2TDOWAWA��,�� casesbygivingdifferentvalues andinterpretationstothe �� value.Forinstance,we mayintroducethe2TDOWAwithalowdegreeof importance,suchas ��∈[0,0.2],andanalysethe effectintheoutputs;orwemayalsointroducethe 2TDOWAinsuchawaythatitismoreimportantthan theWA,byconsideringhigherdegreesofimportance suchas��∈[0.8,1].Thegreaterthe��value,themore importantthe2TDOWAoperator,andviceversa.
The2‐tupleLDMADMapproachbasedonthe 2TDOWAWA��,�� AggregationOperatorisaimedto solvedecision‐makingproblemsinwhichlinguistic preferencesaregatheredinmultipleperiodsanda inaldecisionismadeconsideringallthelinguistic informationprovided.Then,allnon‐dynamicevalua‐tionsareconsideredtohavebeenconductedinthe past.Inotherwords,theaimofthe2‐tupleLDMADM approachistogiveaglobalorderofalternativesset�� basedondynamiclinguisticevaluations,withrespect tothecriteriaset�� andafterbeingevaluatedduring theperiod��
The 2TDOWAWA��,�� operatorisappliedto LDMADMproblemsbasedon2‐tuplelinguistic information.
Astepwisedescriptionofthe2‐tupleLDMADM approachisprovidedinthefollowing.
Step1:Generate2‐tuplelinguisticvaluesforeach period.Anoriginallinguistictermcanbedirectly writtenas(����,0)2‐tuplelinguisticsince���� repre‐sentsthelinguisticlabelcenteroftheinformation (����,��)and��=0representsnodifferencefrom theoriginalvalue �� tothetransformedvalue �� Thenfromgathered��������(����)=��������(����)∈��,we willobtain2‐tuplelinguisticvalues ������(����)= (��,0)������(����)∈��.
Step2:Calculatethecollectivevalueforeachcrite‐rionforeachperiod,usingaclassicaltimeinde‐pendent2‐tuplelinguisticaggregationoperator Υ�� andtheweightingvector��.
Step3:Calculatethenon‐dynamicevaluationfor eachalternativeforeachperiod,usingaclassical timeindependent2‐tuplelinguisticaggregation operatorΨ�� andtheweightingvector��.Results fromthisstepcanbeseenassolutionsforeach individualorstaticLDMADMproblem.
Step4:Calculatethedynamicevaluationforeach alternative,ifnootherperiodwillbecon‐sideredintheLDMADMproblem,usingthe 2TDOWAWA��,��
Step5:Orderdynamicevaluation ��(����) valuesto obtainthebestalternative(s).The ��(����) value issuchthatthehigherthisscore,thebetterthe alternative���� isranked.
The lowchartoftheproposedapproachispre‐sentedinFigure1.
5.IllustrativeExample
Inthissection,weexploretheapplicabilityof the 2TDOWAWA��,�� operatorextendinganillustrative examplepresentedin[14]toa2‐tuplelinguisticcon‐text.Ariskinvestmentcompanywantstoinvestasum ofmoneyinthebestoption.Thisprobleminvolvesthe evaluationoffourpossibleenterprisesdenotedas��= {��1,��2,��3,��4}.Theattributes,��={��1,��2,��3,��4}are: ��1,theabilityofsale,��2,theabilityofproduction,��3, theabilityoftechnologyand��4,theabilityof inancing. Threeexperts, ��={��1,��2,��3},provideassessment informationon �� inordertoprioritizetheseenter‐prises �� withrespecttotheirperformance.Weights ofexpertsandcriteriaareassumedtobeequaland constantover��={��1,��2,��3} Inthefollowing,weutilizethedevelopedapproach toselectthebestenterprise.
Step1:Generate2‐tuplelinguisticvaluesforeach period.Expertsusethelinguistictermset: ��={��0 ∶��������������������������(����),��1 ∶����������������(����), ��2 ∶��������(��),��3 ∶������������(��),��4 ∶��������(��), ��
6
toprovideevaluationinformationfortheenter‐prisesin2006–2008accordingtotheattributes andconstruct,respectively,thelinguisticdeci‐sionmatrices��(����)=(��(����))4×4.
Figure1. Theflowchartoftheproposedapproach
Fig.1. Theflowchartoftheproposedapproach fromthisstepcanbeseenassolutionsforeach individualorstaticLDMADMproblem.
Theoriginallinguisticinformationislistedin Tables1‐3.The2‐tuplelinguisticvaluesforeach periodarelistedinTable 4,where ��1 denotes 2006,��2 denotes2007and��3 denotes2008.
Table1. �������� linguisticvaluesforperiod ��1
Step4:Calculatethedynamicevaluationforeachal‐ternative,ifnootherperiodwillbeconsideredin theLDMADMproblem,usingthe 2TDOWAWAV,W .
X(tλ)=(˘ xi(tλ))m = 2TDOWAWAV,W (¯ xi(tλ)) (11)
Step5:Orderdynamicevaluation ˘ xi(tλ) valuesto obtainthebestalternative(s).The ˘ xi(tλ) valueis suchthatthehigherthisscore,thebettertheal‐ternative ai isranked.
The lowchartoftheproposedapproachispre‐sentedinFigure1.
Step2:Tocomputethecollectivevalue��(����)foreach criterionforeachperiodforeachalternative,we usethe2TAMaggregationoperatorfromDe ini‐tion2duetotheexpertsbeingconsideredtobe equallyimportant.
Inthissection,weexploretheapplicabilityofthe 2TDOWAWAV,W operatorextendinganillustrativeex‐amplepresentedin[13]toa2‐tuplelinguisticcontext. Ariskinvestmentcompanywantstoinvestasumof moneyinthebestoption.Thisprobleminvolvesthe evaluationoffourpossibleenterprisesdenotedas A = {a1,a2,a3,a4}.Theattributes, C = {c1,c2,c3,c4} are: c1,theabilityofsale, c2,theabilityofproduction, c3, theabilityoftechnologyand Threeexperts, informationon prises expertsandcriteriaareassumedtobeequalandcon‐stantover
Table2. �������� linguisticvaluesforperiod ��2
���� ���� ��1 ��2 ��3 ��4
��1 M G VG M
��2 P VG G G
��1
��3 M G VG G
��4 G VG G M
��1 G G M G
Table4. �� non‐dynamic2‐tuplelinguisticevaluationof alternativesforeachperiod.
�� ��1 ��2 ��3
1 (��3,0) (��4,0) (��4,−0.25)
3 (��3,−0.50) (��4,0) (��3,0)
��2
��2 G M M G ��3 G VGEG P
��1 M M EGEG
��2 G M VP VG
��3 P G VG G
��4 P G P VG ��3
��4 M G M M
Step4:Dynamicevaluationsforeachalternative arecomputedusingdifferentsettingsforthe 2TDOWAWA��,�� asillustratedinTable 5.The weightingvectorsareassumedtobe ��= (0.5,0.3,0.2) and ��=(0.1,0.3,0.6).WithVwe canemphasizethehigherimportanceoflater evaluations.
Table3. �������� linguisticvaluesforperiod ��3
Tab.3. xijk linguisticvaluesforperiod t3
Tab.5. ˘ X(tλ) outputsfordifferent ℓ =0 valuesinthe 2TDOWAWAV,W
���� ���� ��1 ��2 ��3 ��4
ek ai c1 c2 c3 c4
��1 VPVG G M
a1 VPVG G M
1
3
4
��1
e1
e2
��3
e3
a2 G G M G
a3 VP P VG G
a4 M G P VP
Table5. ��(����) outputsfordifferent ��=0 valuesinthe 2TDOWAWA��,�� �� ��1 ��2 ��3 ��4
0 (��4,−.25)(��4,−.22)(��3,.25)(��3,.08)
(s4, 25)(s4, 22)(s3,.25)(s3,.08) 0.1 (
0.1 (��4,−.25)(��4,−.25)(��3,.27)(��3,.12)
a1 P P EG G
a2 VGVG G VG
��2 G G M G ��3 VP P VG G ��4 M G P VP ��2
0.2 (��4,−.25)(��4,−.27)(��3,.28)(��3,.16)
0.5 (��4,−.26)(��4,−.35)(��3,.33)(��3,.28)
a3 M VPEG P
a4 P M M G
��1 P P EG G ��2 VGVG G VG ��3 M VPEG P ��4 P M M G
0.8 (��4,−.27)(��4,−.42)(��3,.37)(��3,.40)
0.9 (��4,−.27)(��4,−.45)(��3,.39)(��3,.44)
, 35)(s3,.33)(s3,.28) 0 8 (s4, 27)(s4, 42)(s3,.37)(s3,.40) 0 9 (s4, 27)(s4, 45)(s3,.39)(s3,.44) 1.0 (s4, .27)(s4, .47)(s3,.40)(s3,.48)
1.0 (��4,−.27)(��4,−.47)(��3,.40)(��3,.48)
��1 VPVGEGEG
a1 VPVGEGEG
2��������(��4,−.25)(��4,−.22)(��3,.25)(��3,.08)
2TDWA (s4, .25)(s4, .22)(s3,.25)(s3,.08)
��2 G VG M VG
a2 G VGMVG
a3 VP M G G
��3 VP M G G
��4 G P P M
a4 G P P M
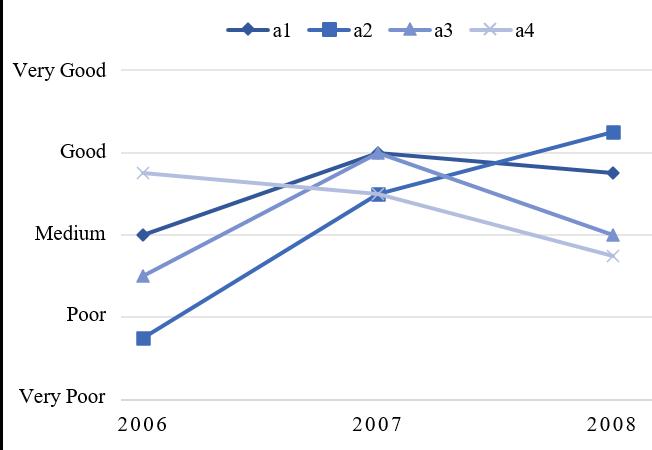
Fig.2. Non‐dynamic2‐tuplelinguisticevaluationof alternatives
Figure2. Non‐dynamic2‐tuplelinguisticevaluationof alternatives
Step3:Forcomputingthenon‐dynamic2‐tuplelin‐guisticevaluation ��(����) foreachalternative,we usethe2TAMaggregationoperatorinEq. 4. ResultsarelistedinTable4anddepictedinFig‐ure2
De inition2duetotheexpertsbeingconsidered tobeequallyimportant.
Step3:Forcomputingthenon‐dynamic2‐tuplelin‐guisticevaluation X(tλ) foreachalternative,we usethe2TAMaggregationoperatorinEq.4.Re‐sultsarelistedinTable4anddepictedinFigure 2
Tab.4. xi non‐dynamic2‐tuplelinguisticevaluationof alternativesforeachperiod. ai t1 t2 t
2����������(��4,−.27)(��4,−.47)(��3,.40)(��3,.48)
2TDOWA (s4, 27)(s4, 47)(s3,.40)(s3,.48)
2��������[23] (��4,−.26)(��4,−.33)(��3,.21)(��3,.05) 2����������[23] (��4,−.27)(��4,−.48)(��3,.17)(��3,.03)
2TDWG [22] (s4, 26)(s4, 33)(s3,.21)(s3,.05)
2TDWHA [22] (s4, 27)(s4, 48)(s3,.17)(s3,.03)
Step5:OrdersofalternativesarelistedinTable6per different��valuesinthe 2TDOWAWA��,�� operator.
different ℓ valuesinthe 2TDOWAWAV,W operator.
Tab.6. Dynamicaggregationoperators,orderand solutionobtained
Table6. Dynamicaggregationoperators,orderand solutionobtained
ℓ Order 0 a2 ≺
Theorderofalternativesvariesdependingonthe 2TDOWAWAV,W classobtainedbymodulatingtheag‐gregationattitudewiththe ℓ value.Themainadvan‐tageofthe 2TDOWAWAV,W operatoristhatitcanpro‐videdifferentresultsregardinguncertaintyaccord‐ingtotheparticularinterestsofthedecisionmaker inthespeci icproblemconsidered.Thatis,iftheex‐pertsconsidertheorderoftheevaluationswithout takingintoaccounttheperiods,theycanassign ℓ=0 and 2TDOWAWAV,W willbehaveasthe 2TDWA aggre‐gationoperator,with a2 beingthebestcompany.Oth‐erwise,iftheytakeintoaccountonlytheimportanceof
Theorderofalternativesvariesdependingon the 2TDOWAWA��,�� classobtainedbymodulatingthe aggregationattitudewiththe��value.Themainadvan‐tageofthe 2TDOWAWA��,�� operatoristhatitcanpro‐videdifferentresultsregardinguncertaintyaccording totheparticularinterestsofthedecisionmakerinthe speci icproblemconsidered.
Figure3. Dynamic2‐tuplelinguisticevaluationof alternativesusingdifferent �� values
Fig.3. Dynamic2‐tuplelinguisticevaluationof alternativesusingdifferent ℓ values
Thatis,iftheexpertsconsidertheorderofthe evaluationswithouttakingintoaccounttheperiods, theycanassign ��=0and 2TDOWAWA��,�� willbehave asthe 2TDWA aggregationoperator,with��2 beingthe bestcompany.Otherwise,iftheytakeintoaccount onlytheimportanceofperiods,theycanassign ��=1 and 2TDOWAWA��,�� willbehaveasthe 2TDOWA aggre‐gationoperator;inthiscase ��1 wouldbethebest company.Now,iftheexpertsneedtoweightboththe orderofthevaluesandtheimportanceoftheperi‐ods,thecoef icient �� allowsmodelingthatattitude, insuchawaythatitispossibletoassignitvalues inthe [0,1] intervalwhosemidpoint(��=0.5)would meanthatbothelementshavethesameweightin thedecision;inthatcasecompany ��1 isbetterthan company��2.However,inthisexampleitisclearthat ��1 or��2 istheoptimalchoice.Inaddition,wecompare theseresultswiththoseobtainedusingthe2‐tuple dynamicweightedgeometric(2TDWG [23])andthe2‐tupledynamicweightedharmonicaverage(2TDWHA [23])aggregationoperators.AsshowninTables5and 6,theresultsaresimilar,withtheparticularitythat operators 2TDWG and 2TDWHA produceasingle ixed result,while 2TDOWAWA��,�� offersarangeofoptions thatallowsmodelingdifferentattitudesintheprob‐lemsolvingprocess.
andthe2‐tupledynamicweightedharmonicaverage (2TDWHA [22])aggregationoperators.Asshownin Tables5and6,theresultsaresimilar,withthepar‐ticularitythatoperators 2TDWG and 2TDWHA pro‐duceasingle ixedresult,while 2TDOWAWAV,W offers arangeofoptionsthatallowsmodelingdifferentatti‐tudesintheproblemsolvingprocess.
Figure 3 visualizesthebehaviorofthe 2TDOWAWAV,W operatorforasetof ℓ values.
Theproposedapproachoffersseveraladvan‐tages:Theintroductionofthe ℓ parameterinthe 2TDOWAWAV,W providesdecision‐makerswithahigh degreeof lexibility.Theycanadjusttheseparame‐tersaccordingtothespeci icrequirementsoftheLD‐MADMproblem.
Thisfeaturemakesthe2‐tupleLDMADMapproach basedonthe 2TDOWAWAV,W applicabletoawide rangeofreal‐worldscenarios.
6.Conclusions
Figure 3 visualizesthebehaviorofthe 2TDOWAWA��,�� operatorforasetof��values.
Theproposedapproachoffersseveraladvan‐tages:Theintroductionofthe �� parameterinthe 2TDOWAWA��,�� providesdecision‐makerswithahigh degreeof lexibility.Theycanadjusttheseparam‐etersaccordingtothespeci icrequirementsofthe LDMADMproblem.
Thisfeaturemakesthe2‐tupleLDMADMapproach basedonthe 2TDOWAWA��,�� applicabletoawide rangeofreal‐worldscenarios.
Theselectionofasuitabletime‐dependent2‐tuple linguisticaggregationoperatorisrelevantduetoits properties,whichcanhighlymodifythecomputing costaswellasresultsthemselvesandtheiraccu‐racyandinterpretability.Theexisting2‐tuplelinguis‐ticaggregationoperators,suchas2TDA��,2TDWA��
and2TDOWA�� operators,cannotsimultaneouslycon‐sidertheinformationabouttheimportanceofthe linguisticnon‐dynamicevaluationbeingaggregated andtheimportanceofperiods,andthuscannotequi‐libratethein luenceofbothkindofargumentsonthe inaldynamicevaluationandthedecisionresult.To solvethisdrawback,thispaperintroducedanew2‐tuplelinguisticdynamichybridweightedaggregation operator,whichisveryusefultomodeldifferentatti‐tudesindecision‐makingbysimultaneouslyweight‐ingthegivenargumentsaswellastheirordered positions.Thenovel 2TDOWAWA��,�� weightsnotonly theimportanceofaparticulartimeperiod,butalso theimportanceofnon‐dynamicevaluationsinsuch atimeperiod.Itsmainadvantageisthatitcanunify theweightingbehaviourofOWAandWAfamiliesby includingthedegreeofimportanceofeachconcept intheaggregation. 2TDOWAWA��,�� isableto lexibly modelsituationswhereeitherthe2TDOWAorthe 2TDWA itstheanalysis.Theparametricnatureof theproposed 2TDOWAWA��,�� allowsdecision‐makers to ine‐tunethein luenceoftimeperiodsaswell asnon‐dynamicevaluationsatthoseperiods.This levelofcontrolempowersdecision‐makerstopre‐ciselytailortheaggregationprocesstotheirprefer‐encesregardingthecharacteristicsoftheproblem. Thus,the 2TDOWAWA��,�� isamoregeneralapproach toLDMADM.
2TDOWAWAV,W allowsdecision‐makersto ine‐tune thein luenceoftimeperiodsaswellasnon‐dynamic evaluationsatthoseperiods.Thislevelofcontrolem‐powersdecision‐makerstopreciselytailortheaggre‐gationprocesstotheirpreferencesregardingthechar‐acteristicsoftheproblem.Thus,the 2TDOWAWAV,W is amoregeneralapproachtoLDMADM.
Infuturework,weexpecttodevelopfurtherre‐searchonseveralfamiliesof 2TDOWAWAV,W opera‐torsregardingthereorderingprocessandtheuseof hybridaggregationoperators.
[1] L.Zadeh.Fuzzylogic=computingwithwords. Trans.FuzSys.,4(2):103–111,May1996.
[2] L.Zadeh.Fuzzylogic—apersonalperspective. FuzzySetsandSystems,281:4–20,2015.Special IssueCelebratingthe50thAnniversaryofFuzzy Sets.
[3] L.Zadeh.Fuzzysets. InformationandControl, 8(3):338–353,1965.
[4] Z.Pawlak.Roughsets. InternationalJournalof Computer&InformationSciences,11,1982.
[5] L.A.Zadeh.Towardatheoryoffuzzyinformation granulationanditscentralityinhumanreason‐ingandfuzzylogic. FuzzySetsSyst.,90(2):111–127,September1997.
Infuturework,weexpecttodevelopfurther researchonseveralfamiliesof 2TDOWAWA��,�� oper‐atorsregardingthereorderingprocessandtheuseof hybridaggregationoperators.
Theselectionofasuitabletime‐dependent2‐tuple linguisticaggregationoperatorisrelevantduetoits properties,whichcanhighlymodifythecomputing costaswellasresultsthemselvesandtheiraccu‐racyandinterpretability.Theexisting2‐tuplelinguis‐ticaggregationoperators,suchas2TDAϕ,2TDWAθ and2TDOWAϑ operators,cannotsimultaneouslycon‐sidertheinformationabouttheimportanceofthelin‐guisticnon‐dynamicevaluationbeingaggregatedand theimportanceofperiods,andthuscannotequilibrate thein luenceofbothkindofargumentsonthe inal dynamicevaluationandthedecisionresult.Tosolve thisdrawback,thispaperintroducedanew2‐tuple linguisticdynamichybridweightedaggregationoper‐ator,whichisveryusefultomodeldifferentattitudes indecision‐makingbysimultaneouslyweightingthe givenargumentsaswellastheirorderedpositions. Thenovel 2TDOWAWAV,W weightsnotonlytheimpor‐tanceofaparticulartimeperiod,butalsotheimpor‐tanceofnon‐dynamicevaluationsinsuchatimepe‐riod.Itsmainadvantageisthatitcanunifytheweight‐ingbehaviourofOWAandWAfamiliesbyincluding thedegreeofimportanceofeachconceptintheaggre‐gation. 2TDOWAWAV,W isableto lexiblymodelsitu‐ationswhereeitherthe2TDOWAorthe2TDWA its theanalysis.Theparametricnatureoftheproposed
[6] H.Kamacı,S.Petchimuthu,andE.Akçetin.Dy‐namicaggregationoperatorsandeinsteinop‐erationsbasedoninterval‐valuedpicturehesi‐tantfuzzyinformationandtheirapplicationsin multi‐perioddecisionmaking. Computational andAppliedMathematics,40,2021.
YelenyZulueta-Véliz∗ –SchoolofComputationalSci‐encesandTechnologies,UniversidaddelasCiencias Informáticas,Havana,Cuba,https://orcid.org/0000‐0003‐0253‐528X,e‐mail:yeleny@uci.cu.
CarlosRafaelRodríguezRodríguez –Center forProjectManagementandDecision‐Making, UniversidaddelasCienciasInformáticas,Havana, Cuba,https://orcid.org/0000‐0003‐1803‐0294, e‐mail:crodriguezr@uci.cu.
AylinEstradaVelazco –DepartmentofInformatics, UniversidaddelasCienciasInformáticas, Havana,Cuba,e‐mail:avelazco@uci.cu,www: https://orcid.org/0000‐0002‐2557‐361X.
[7] J.Morente‐Molinera,X.Wu,A.Morfeq,R.Al‐Hmouz,andE.Herrera‐Viedma.Anovelmulti‐criteriagroupdecision‐makingmethodforhet‐erogeneousanddynamiccontextsusingmulti‐granularfuzzylinguisticmodellingandconsen‐susmeasures. InformationFusion,53:240–250, 2020.
∗Correspondingauthor
[8] R.Tao,Z.Liu,R.Cai,andK.Cheong.Adynamic groupmcdmmodelwithintuitionisticfuzzyset: Perspectiveofalternativequeuingmethod. InformationSciences,555:85–103,2021.
Theresearchpresentedinthispaperwasfundedby theNationalScienceCentre,Poland,underthegrant no.2019/35/O/ST6/01806.
[9] F.Teng,C.Du,M.Shen,andP.Liu.Adynamic large‐scalemultipleattributegroupdecision‐makingmethodwithprobabilisticlinguistic termsetsbasedontrustrelationshipandopin‐ioncorrelation. InformationSciences,612:257–295,2022.
References
[1] L.Zadeh,“FuzzyLogic=ComputingwithWords,” TransactionsonFuzzySystems,vol.4,no.2,1996, pp.103–111,doi:10.1109/91.493904.
[10] Y.Zulueta‐VelizandL.García‐Cabrera.ACho‐quetintegral‐basedapproachtomultiattribute decision‐makingwithcorrelatedperiods. GranularComputing,3(3):245–256,sep2018.
[2] L.Zadeh,“FuzzyLogic—APersonalPerspective,” FuzzySetsandSystems,vol.281,2015,pp.4–20, doi:10.1016/j.fss.2015.05.009.
[3] L.Zadeh,“FuzzySets,” Informationand Control,vol.8,no.3,1965,pp.338–353, doi:10.1016/S0019‐9958(65)90241‐X.
[4] Z.Pawlak,“RoughSets,” InternationalJournalof Computer&InformationSciences,vol.11,1982, doi:10.1007/BF01001956.
[5] L.Zadeh,“TowardaTheoryofFuzzyInforma‐tionGranulationanditsCentralityinHuman ReasoningandFuzzyLogic,” FuzzySetsand Systems,vol.90,no.2,1997,pp.111–127, doi:10.1016/S0165‐0114(97)00077‐8.
[6] H.Kamacı,S.Petchimuthu,andE.Akçetin, “DynamicAggregationOperatorsandEinstein OperationsBasedonInterval‐ValuedPicture HesitantFuzzyInformationandtheirApplica‐tionsinMulti‐PeriodDecisionMaking,” ComputationalandAppliedMathematics,vol.40,2021, doi:10.1007/s40314‐021‐01510‐w.
[7] J.Morente‐Molineraetal.,“ANovelMulti‐CriteriaGroupDecision‐MakingMethod forHeterogeneousandDynamicContexts UsingMulti‐GranularFuzzyLinguistic ModellingandConsensusMeasures,” InformationFusion,vol.53,2020,pp.240–250,doi:10.1016/j.inffus.2019.06.028.
[8] R.Tao,etal.,“ADynamicGroupMCDMModel withIntuitionisticFuzzySet:Perspectiveof AlternativeQueuingMethod,” Information Sciences,vol.555,2021,pp.85–103, doi:10.1016/j.ins.2020.12.033.
[9] F.Teng,C.Du,M.Shen,andP.Liu,“ADynamic Large‐ScaleMultipleAttributeGroupDecision‐MakingMethodwithProbabilisticLinguistic TermSetsBasedonTrustRelationship andOpinionCorrelation,” Information Sciences,vol.612,2022,pp.257–295, doi:10.1016/j.ins.2022.07.092.
[10] Y.Zulueta‐VelizandL.García‐Cabrera,“ACho‐quetIntegral‐BasedApproachtoMultiattribute Decision‐MakingwithCorrelatedPeriods,” GranularComputing,vol.3,no.3,2018,pp.245–256, doi:10.1007/s41066‐018‐0095‐4.
[11] F.HerreraandL.Martínez,“A2‐tupleFuzzy LinguisticRepresentationModelforComputing withWords,” IEEETransactionsonFuzzySystems, vol.8,no.6,2000,pp.746–752.
[12] T.MalhotraandA.Gupta,“ASystematicReview ofDevelopmentsinthe2‐tupleLinguisticModel anditsApplicationsinDecisionAnalysis,” Soft
Computing,vol.27,2020,doi:10.1007/s00500‐020‐05031‐2.
[13] Y.Zulueta‐VelizandP.J.Sanchez,“Linguistic DynamicMulticriteriaDecisionMakingUsing SymbolicLinguisticComputingModels,”Granu‐larComputing,vol.3,no.3,2018,pp.229–244, doi:10.1007/s41066‐018‐0088‐3.
[14] Z.Xu,“Multi‐PeriodMulti‐Attribute GroupDecision‐MakingUnderLinguistic Assessments,”InternationalJournalofGeneral Systems,vol.38,no.8,2009,pp.823–850, doi:10.1080/03081070903257920.
[15] Y.Liu,“AMethodfor2‐tupleLinguisticDynamic MultipleAttributeDecisionMakingwithEntropy Weight,” JournalofIntelligentFuzzySystems,vol. 27,no.4,2014,pp.1803–1810,doi:10.3233/IFS‐141147.
[16] R.Yager,“OnOrderedWeightedAveraging AggregationOperatorsinMulticriteriaDecision Making,” IEEETransactionsonSystems,Man,and Cybernetics,PartB:Cybernetics,vol.I,no.18, 1988,pp.183–190,doi:10.1109/21.87068.
[17] D.García‐Zamoraetal.,“AdmissibleOWAOpera‐torsforFuzzyNumbers,”FuzzySetsandSystems, vol.480,2024,doi:10.1016/j.fss.2024.108863.
[18] V.Torra,“TheWeightedOWAOperator,” InternationalJournalofIntelligentSystems,vol.12,1997, pp.153–166.
[19] Z.XuandQ.Da,“AnOverviewofOperatorsfor AggregatingInformation,” InternationalJournal ofIntelligentSystems,vol.18,2003,pp.953–969.
[20] J.Merigo,“OntheUseoftheOWAOperatorinthe WeightedAverageanditsApplicationinDecision Making,” LectureNotesinEngineeringandComputerScience,vol.41,2009.
[21] L.Martínez,R.M.Rodríguez,andF.Herrera, The 2tupleLinguisticModel:ComputingwithWords inDecisionMaking,SpringerInternationalPub‐lishing,2015,p.162,doi:10.1007/978‐3‐319‐24714‐4.
[22] G.JimenezandY.Zulueta,“A2‐tupleLin‐guisticMulti‐PeriodDecisionMakingApproach forDynamicGreenSupplierSelection,” Revista DYNA,vol.84,no.202,2017,pp.199–206, doi:10.15446/dyna.v84n202.58032.
[23] F.AiandJ.Yang,“ApproachestoDynamicMul‐tipleAttributeDecisionMakingwith2‐tupleLin‐guisticInformation,” JournalofIntelligentFuzzy Systems,vol.27,no.6,2014,pp.2715–2723, doi:10.3233/IFS‐131094.
DOI:10.14313/jamris‐2025‐033
Abstract:
PARTITIONINGOFCOMPLEXDISCRETEMODELS FORHIGHLYSCALABLESIMULATIONS
PARTITIONINGOFCOMPLEXDISCRETEMODELS FORHIGHLYSCALABLESIMULATIONS
PARTITIONINGOFCOMPLEXDISCRETEMODELS FORHIGHLYSCALABLESIMULATIONS
Submitted:9th May2024;accepted:10th February2013
JakubZiarko,MateuszNajdek,WojciechTurek
Theneedformoreandmoreaccuratesimulations ofgroupsofautonomousbeingshasdirectedthe researcher’sattentiontowardswaysofparallelizingsim‐ulationalgorithms.Parallelexecutionofdiscretesimu‐lationmodelsupdatemethodsrequirestheirdivisionof laborbetweenworkers.Existingmethodsusedforgrid divisionaimatprovidingequalareasoffragmentsand minimizingthelengthoftheresultingborders.However, inreal‐lifesimulations,otherfactorsalsohavetobe considered.Thispaperpresentsamethodforgridpar‐titioning,thatalsoallowsfordefiningindivisibleareas, considerscomplexshapesofreal‐lifeenvironments,and supportsdivisionsuitablefordefinedarchitecturesof nodesandcores.Themethodisevaluatedusingseveral scenarios,whichprovidedsatisfactoryresults.
Keywords: Simulation,ModelPartitioning,Scalability, HighPerformanceComputing
1.Introduction
Methodsforsimulatingcomplexphenomena observedinsocietiesofautonomousbeings havereceivedsigni icantattentionoverthelast decades[14].Modellingandsimulationofherdsof animalsorgroupsofpeopleinvariousenvironments andsituationscanleadtobetterunderstandingof patternsandlawsinthesurroundingworld.Itcanalso beusedforpredictingfuturestatesinsuchsystems, whichhasnumerousapplicationsinplanningand management.Themostwidespreadapproachtothe problemofmodellingenvironmentsandthebeingsin themisinspiredbytheassumptionsusedincellular automatons.Despitethesigni icantsimpli ications imposedbythediscretizationofspaceandtime,the gridsofcellsrepresentingthephysicalspace,and thebeings,whichcanoccupyonecellatatime,these simulationshavebeenprovenusefulinavariety ofcases,fromevacuationsmodelling[9]totraf ic simulations[8].
Continuousdevelopmentofthesetypeofsimula‐tionsinevitablyleadstoanincreaseinthedemand fortheirperformance.Thedesiretosimulatelarger environmentsandmorenumerousgroupsofbeings, andtoaddmoredetailstothemodels,increasesthe amountofcomputations.Atthesametime,users ind new,demandingapplicationsforsuchsimulationsand requireresultstobeprovidedveryfast.
Forexample,asimulationcanbeusedforevaluat‐ingautomatically‐generatedscenariosinoptimization algorithmsorasabasisforreal‐timemanagement methods[16].Suchademandcannotbesatis iedbya singlecomputer,andthisleadsdirectlytotheconcept ofsimulationalgorithmparallelization.
Theproblemofparallelexecutionofgrid‐based simulationalgorithmsistypicallysolvedbysplitting thegridintoparts,whicharethenupdatedindepen‐dentlybyseparateworkerprocesses.Thisapproach leadstoseveralchallengingproblemsrelatedtostate synchronizationbetweenworkers[10].
Thispaperfocusesontheissueofef icientutiliza‐tionofavailablecomputingresources,whichrequires properdivisionofcomputationaltasksbetweenthe workers.Thedivisionofthegridmustsplitthetask intoparts,whichwilluniformlyloadtheavailable computingresourcesandlimitthescopeofthesyn‐chronization.Intheexistingapproaches,whichwill bediscussedindetailsinSection2,thesetwofactors aretypicallytranslatedintotwometrics:thestandard deviationofthefragments’sizes,andthetotallength offragments’commonborders(referredtoasedge‐cut).Althoughthesemetricsseemadequate,theydo notre lectalltheissuesrelatedtoparallelsimulation ofcomplexmodelsonparallelhardware.Thereareat leastthreeotherissuesthatshouldbeconsideredby thegriddivisionalgorithm:
1) thestructureoftheenvironment,
2) thecomplexityofsynchronizationindifferentfrag‐mentsoftheenvironment,and
3) thearchitectureofthecomputinghardware.
Thestructureoftheenvironment(1)inreal‐life scenariosistypicallyfarmorecomplexthantheuni‐form,rectangular‐shapedmodel.Itcontainscomplex shapesofspacesaccessibleforbeingsthataresepa‐ratedbyinaccessiblefragments(e.g.,roomsseparated bywalls).Theseunusedpartscanstronglyin luence optimaldivisionandshouldbedirectlyaddressedby thealgorithm.
Theproblemofsynchronizationcomplexity(2) canstronglydependonthedensityofbeingsindif‐ferentfragmentsoftheenvironment.Forexample,in complexpedestrian‐dynamicsmodels,liketheones discussedin[10],con lictresolutionrequiresaddi‐tionalprocessingandcommunication.
Allowingforareaborderstosplitapotentially crowdedfragment(likeanarrowpassageoradoor‐way)increasesthevolumeoftheexchangedinforma‐tionandburdensperformance.Thisissueisaddressed intheproposedsolutionbyde iningfragmentsofthe environmentsthatcannotbedivided.
Thetypicalarchitectureofmoderncomputing hardware(3)providesmanycomputingcoreswithin asinglecomputingnode.Communicationbetweenthe coresisusuallyfarmoreef icientthancommunication overthenetworkconnectingthenodes.Therefore,the methodshoulddistinguishlocalandremoteborders ofthegridfragmentsandtrytominimizethelengthof themoreremoteones.
Themaincontributionofthispaperisanewgrid partitioningmethodthatconsidersinaccessibleand indivisibleareasandprovidesdivisionforlocaland remoteparallelism.Themethodisbasedonastate‐of‐the‐artgraphpartitioningmethodthathasbeen extendedandmodi ied.Adetaileddescriptionand justi icationoftheintroducedmodi icationsispro‐vided.Thesourcecodefortheimplementationofthe proposedsolutionisavailablefordownload[18].The methodisevaluatedusingasetofcomplexscenarios.
Graphpartitioningisabranchofgraphtheory dedicatedtothereductionofgraphsintosmallersub‐graphsbydividingtheirnodesintosmaller,mutually exclusivesubgroups.Thegraphpartitioningproblems areNP‐complete.Therearemanyalgorithmswith whichtoapproachthisproblem.Amongthem,thefour maingroupsofgraphpartitioningmethodscanbe distinguished:
‐ spectralpartitioning,
‐ recursivepartitioning,
‐ geometricpartitioning,and
‐ multilevelpartitioning.
Spectralpartitioning. Spectralgraphpartitioning methodsarebasedontheselectionofasubsetof verticesthatdividesthegraphintodisjointedcompo‐nents.Suchdivisionsseektoistochoosethesmall‐estsubsetanddividethegraphintosubsetswithan equalorclosetoequalnumberofvertices.Those methodsusetheLaplacianmatrixrepresentationof agraph.Theremanyapproachesforthismethod;for example,[11]presentsthemethodusinganalgebraic approachtocomputingvertexseparators,while[12] describesthespectralnesteddissectionalgorithm (SND).Thesetwoalgorithmsuseknowledgeofthe spectralpropertiesoftheLaplacianmatrixtocalcu‐latethevertexseparatorsinthegraph,whichdeter‐minesthepartitioningofthegraph.Thesemethods areexpensive,however,duetothecomputationof theFiedlervector,whichselectioncriteriaforver‐ticesforthepartitions.In[1],anattempttoshorten theexecutiontimeisproposed‐theFiedlervector iscalculatedusingthemultilevelspectralbisection algorithm(MSB).However,suchimprovementsare stillverycomputationallydemanding.
Recursivepartitioning. Therecursivemethods aregenerallysimplertoimplement,butdonotwork sowellformorecomplexproblems,mainlydueto thegreedynatureofthesealgorithms.Themethod presentedin[2]assumesdivisionofthegraphintoa numberofareasequaltoapoweroftwo.Thismethod canalsodividethegraphaccordingtothecomputa‐tionalcapabilitiesoftheindividualprocessorcores. However,theunderlyingideaofdividingthegraph intosmallerandsmallerpartsprecludesthealgorithm fromtakingindivisiblepartsintoaccountwithoutsig‐ni icantlyalteringtheideaunderlyingit.
Geometricpartitioning. Geometricmethodsuse thegeometricdatalayoutofthegraphforoptimal partitioning.Theirmainadvantageofthesemethodsis theirrelativelyshortexecutiontime,buttheyachieve lower‐qualitydivisionresultsthanthespectralmeth‐ods.Oneofthebestusesthismethodispresented in[6],wheretheauthorsdescribeaneffectivewayof partitioningunstructuredgraphenvironment,which isusefulfortheFEMs( initeelementmethods)and FDMs( initedifferencemethods).Thisapproachuses thegeometryofagivengraphto indapartitioningin lineartime.Theycanbeappliedtographsrepresent‐ingtwo‐andthree‐dimensionalgrids.Acharacteristic featureofgeometricmethods,resultingfromtheir randomnature,istheneedtoexecutethealgorithm anywherefrom5to50timestoobtainresultscompa‐rablewithspectralmethods,whilestillmaintaininga shortercomputingtime.Geometricmethodsareappli‐cableonlywhenthecoordinatesofallverticesinthe graphareavailable.Formanyproblems(linearpro‐gramming,VLSI),suchcoordinatesarenotavailable, limitingtheapplicabilityofthismethod.Therearealso algorithmsthatareabletocalculatecoordinatesfor graphverticesusingspectralmethods[3],butthey signi icantlyincreasecomputingtime.
Multilevelpartitioning. Acharacteristicfeature ofthemultilevelgraphpartitioningapproachisthe reductionofthegraphsizebycombiningthever‐ticesandedgesanddividingthereducedgraphinto partitions.Thelastphaserestorestheinitialgraph whilepreservingtheobtainedpartitioning.Thegraph isoftenreduceduntilthenumberofverticesreaches thedesirednumberofpartitions[7].Thephaseof restoringthegraphtoitsinitialsizeisaccompanied byanalgorithmaimedatimprovingthedivision[4]. Operatingonareducedgraphhaslowercomputa‐tionalcoststhanotherapproaches.Themethodsin thisclassreducethelengthoftheboundarybetween partitionswhilemaintainingtheproportionalsizes oftheareas.Suchmethodswereinitiallyintendedto reducepartitioningtimeattheexpenseofquality.The multilevelpartitioningmethodisdescribedinmore detailinSection3
Recentresearchsuggeststhatmultilevelmethods yieldbetterresultsthanspectralmethods.Libraries suchasParty[7],Metis[5],Jostle[17]arebasedona multilevelpartitioningschemeandcurrentlygivethe bestresultsintermsofpartitioningquality.
(a) Jostle‐695.
(b) Metis‐688.
(c) Party‐615.
Figure1. Partitioninga100x100gridinto16areas;the edge‐cutvalueisshowninthecaptionforeach method.[7]
Theauthorsof[7]comparedthesealgorithmsby partitioninga100x100gridareainto16partitions,as demonstratedinFig. 1.Allofthesemethodsreduce thegraph;however,onlyJostleandPartyreducethe graphuntiltheygetthenumberofverticesequal totherequirednumberofpartitions.Bycomparing manydifferentexamplesofgridpartitioningprob‐lems,Partyseemstooutperformotheralgorithms,as showninFig.1c.Moreover,Jostlehasproblemswith partitioningthegridintoappropriateareas.Itcanbe observedthatelongated,irregularpartitionsincrease theedge‐cut,eventhoughboundariesbetweenadja‐centpartitionsarerelativelystraight.
Noneoftheabove‐mentionedmethodstakethe problemofindivisibleareasandareasexcludedfrom thecalculationsunusedareasintoaccount.
Themultilevelgraphpartitioningmethods[7] arethemostpromisingandgivethehighest‐quality results.AsshowninFig. 1,Partyyieldedthebest resultsandassuch,thepresentlyproposedsolution improvesuponit.Themaingoalistoproposea solutionthatwillbeabletosupportbothindivisible areasandexcludedareas,whileprovidinghigh‐quality graphpartitioning.
3.GridDivisionAlgorithm
Theproposedmulti‐levelschemecontainsthefol‐lowingsteps:
1) Buildingagraphfromanimage.
2) CoarseningthegraphwiththeLAMmatchingalgo‐rithm.
3) Re iningthepartitioningandrestoringthegraph toitsinitialsize.
It irstreducesthegraph,thenappliespartition‐ingand,thenrestoresthegraphtotheinitialsize whilepropagatingthepartitionstoalargerandlarger graphuntilitreachesitsoriginalsize.Localre ine‐mentisexecutedinbetweentherestorationstepsto increaseef iciency.Itbalancespartitionsizes,reduces theedge‐cutbetweenpartitions,andremovesdiscon‐nectedpartitions.
3.1.Buildingagraphfromanimage
Aninitialgraphisbuiltfromanimage.Eachpixel ontheimagerepresentsavertex.Colorsrepresent differentgraphareatypes;yellowareasaretheindi‐visibleareas,whileredareasaretheexcludedareas. Normalareasarewhite.Inthegraphthatiscreated, thenormalareacontainsverticeswithaweightof 1,whileexcludedareasareeitherremovedfromthe graphorcontainverticeswithaweightof 0.Every indivisibleareaismappedintoasinglevertexwitha weightequaltothesumoftheweightsofthevertices inthatarea(Fig.2).Thus,verytimeasetofedgesis replacedbyasingleedge,theweightofthesingleedge isasumofthereplacedvertices’weights.
3.2.Coarseningphase
Tocreateasmallergraph,aheuristicofamatching algorithmisintroduced.Inourcase,itistheLAM[13] matchingalgorithm,whichisexecuteduntilthenum‐berofverticesisequaltothedesirednumberofpar‐titions.Itstartsfromarandomlychosenedgeand checksadjacentedges.Aslongasitmanagesto ind adjacentedgeswithahigherweight,thealgorithm switchesontothemandrepeatstheprocedureuntilit indstheedgewiththehighestweight.Verticesatthe endofthisedgewillbematchedonlyiftheysatisfy acertaincondition;intheParty[7]implementation, twovertices,��and��,withweights���� and����,couldbe matchedonlyiftheircombinedweightdidnotexceed doublethelowestweight(��������������)plustheheaviest weight(��ℎ����ℎ������)thatoccuredinthewholegraph (Equation1).
Figure2. Excludedareasareeitherremovedfromthe graph(c),ortheirweightsaresetto 0 (b).
Thisconditionallowsforbalancedvertexmatching, avoidingverticeswithveryhighweightsalongwith verticeswithrelativelysmallweights.Theweight ofthenewvertexisthesumoftheweightsofthe matchedvertices.
The irstchangeintroducedbyustotheLAMalgo‐rithmisanextendedconditionformatchingvertex�� withvertex��(3):
(a) initialgraph
(b) withoutthediscount
(c) withthediscount
Figure3. Effectsofthepartitioningwithandwithoutthe discount.
Inourcase,however,thisassumptionisdisturbed byverticesmadefromindivisibleareas,whichmay haveveryhighweightsatthebeginningofthealgo‐rithmexecution.Asaresult,withoutourmodi ication, thealgorithmgivespoor‐qualityresults(Fig.3).
Addingthediscounttothematchingconditions enhancestheconditionandcreatesmorebalanced vertexmatchings,especiallyintheinitialalgorithm executions.Thelatertheiteration,themoresimilarit becomestotheoriginalcondition.
Theothermodi icationmadetotheLAMalgorithm istheremovalofthe �� set,whichcontainsedges thatareabouttoberemoved.Itisnotusefulforthe graphshrinkingapplication,soitsmaintenancecanbe skipped.
3.3.Localrefinementsandgraphrestoration
If ����������������>1,itisassignedavalueof 1. �� is theexpectednumberofLAMalgorithmexecutions.It iscountedasthenumberoftimesthenumberofgraph verticeshastobedividedby2togetanumberof verticesthatislessorequaltothenumberofparti‐tionsrequiredtoachieveit.��isthecurrentnumberof LAMalgorithmexecutions.Theconditionestablished byauthorsofthePartylibraryassumesabalanced formationforthevertices’matchingsfromthevery beginningofthealgorithmexecution.
Thesecondpartofthegraphpartitioningalgo‐rithmisthere inementandrestorationphase.Ittakes asanargumentashrunkengraphanditeratively restoresittotheinitialsize.Afterthegraphisabout 90%restored,there inementprocedurestartsalong‐sidetherestoration,whichaimstoreducetheedge‐cutandbalancethesizesofthepartitions.Forthe re inementphase,thealgorithmbasedontheHelpful Setheuristic[15]wasused.
TheimplementedHelpfulSetheuristics(Code 1) startfromtheinitialpartitioningandreducesthe edge‐cutusinglocallyperformedchanges.
Asanexample,letustakepartitions ��1 and��2.It startsfromtheinitialset k-helpful,whichisasubset of��1 or��2 thatreducestheedge‐cutby��ifitismoved totheotherpartition.Letusassumethat k-helpful wasfoundin ��1.Thenitismovedto ��2.Inthenext step,thealgorithmstartstolookfora balancing set inthe ��2 partition.Thissethastobalancethe partitions(reducingsizestobesimilartotheinitial ones),anditcanincreasetheedge‐cutmaximallyby (��−1) edges.Ifabalancingsetisfound,thenitis movedto ��1.Thisresultsinanedge‐cutdecreaseof atleast1.Verticesthatbuilda helpfulset anda balancingset areaddedgreedilyandarestoredin asortedpriorityqueueaccordingtotheirvalue.The mostimportantpartofthealgorithmisto igureout the �� helpfulnessvaluesforthesets.If �� istoosmall, thengoodsetscannotbefound;if �� istoobig,then theexecutiontimeislonger,butthefoundsetsare notnecessarilybetter.Tocompute��value,Partyuses an adaptivelimitation technique.Itcontainstwo ��limits‐aseparateoneforeachofthesets.
1 HelpfulSet(��,��)
2 IFcut_size��−�� <0
3 RETURN;
4 ���� ←���� ←������/2;/* Initializethelimits */
5 �������� =(|��|+|��|)/2)⋅0.2;/* InitializemaxsizeofHS */
6 WHILE ���� +���� ≥1
7 IF ���� =0 OR 2⋅���� ≤���� /* Choosebetterpartition */
8 Swap(��,��);
9 ���� = BuildHS(��,����,��������);
10 IF ℎ(����)≤���� /* Iftheh(����) issmallerthanwanted
11 ���� ←��(����);...adjustthelimitforthenext search */
12 IF ���� >ℎ(����)
13 ���� = BuildHS(��,����,��������);
14 IF ℎ(����)≥ℎ(����) /* BetterpartitioniscalledA
15 Swap(��,��);
16 ELSE
17 ���� ←��(����);...andtheotherlimitis reduced */
18 UndoBuild(����);
19 IF ������(����)==0
20 ���� =0;
21 CONTINUE;
22 ���� ←������(����,ℎ(����));/* Adjustthelimit */
23 MoveSet(����) /* Movethehelpfulset */
24 ������,������← DetermineMaxAndMin(��(����));
25 ���� = BuildBS(��,1−ℎ(����),������,������);
26 IF ���� ≤��(����)≤��ℎ and ℎ(����)>−ℎ(����) /* Checkingthe BS */
27 MoveSet(����); /* Yes:MovetheBS */
28 ���� ←���� +log(����); /* Increasethelimits */
29 ���� ←���� +1;
30 ELSE
31 UndoBuild(����);/* No:Undothebuildoperation and
32 UndoMove(����);themovementofthehelpfulset */
33 ���� ←����/4; /* Reducethelimits */
34 ���� ←����/2;
35 IFcut_size��−�� >0.1⋅ longer_edge_of_a_grid
36 Balance(��,��);
Code1. ModifiedHelpful‐Setalgorithm. Severalmodi icationshavebeenintroducedtothe originalalgorithminordertoadjustitfortheconsid‐eredrequirements.
The irstconcernstheinitializationof��������.Orig‐inallyitssizewassetto 128,whileintheproposed methoditisdependentonthesizesofthepartitions (line5).Usedforthispurpose,the0.2factorcouldbe changed‐but,accordingtotheexperiments,itshould notbemorethan0.4,topreventthehelpfulsetfrom gettingtoobig.TheconditionfortheWHILEloopwas weakenedfrom ≥0 to ≥1 todecreasenumberof thealgorithmexecutions.Theadditionalrepetitions didnotimprovethepartitioning,butworsenexecu‐tiontime.InParty’ssolution,duringthesearch,the helpfulnessofthehelpfulsetis>−��/2,anditsweight cannotexceed��������.��isanaveragevertex’sdegreein thegraph.Inourcase,��=4.Thisrulehappenednot towork,however.Thealgorithmisgreedyandoften buildssets,whichful illedthe�������� conditionandwith −2≤ℎ��������������������≤0.Butwhen,intheoriginal code,itwascheckedwhetherℎ��������������������<0,and if��������,thehelpfulsetsearchhadtostartonceagain. Becauseofthis,thealgorithmwasrunningunsuccess‐fullyformultipletimes.Thesolutiontothisissuewas achangeintheinstructionfortheconditionforthe sizeofthe ���� (line 19),allowingforthebuildingof helpfulsetswithahelpfulvalue≥0(line9and13). Thehelpful‐setalgorithmhasamechanismtobuilda helpfulsetfromamorepromisingpartition(line 7). Afterthehelpfulsetisfound‐whichmighthappen afterfurtheradjustmentstothe��value‐thebalancing procedurestarts,anda[������,������]rangeiscomputed. Thisistheminimumandamaximumweightofthebal‐ancingset.������isalittlebiggerthansizeofthehelpful setand������isalittlesmaller.Duringtheexperiments, thealgorithmwasusuallyreaching������size‐andfor somereason,foreachpairofre inedpartitions,the sameonewasusuallychosentobuildthehelpfulset from;thesamewastrueforbalancingset.Asaresult, onepartitionwasalwaysgrowingattheexpenseofthe other.Asaresult,thefollowingchangetocomputing the������and������valueswasintroduced:
1 DetermineMaxAndMin(��(����))
2 ��������= Rand(0,1) /* drawseither 0 or 1 */
3 IF ��������==1
4 ������=|��(����)−0.1⋅��(����)|
5 ������=|��(����)+0.1⋅��(����)|
6 ELSE 7 ������=|��(����)−0.2⋅��(����)|
8 ������=|��(����)−0.1⋅��(����)|
9 ENDIF 10 RETURN ������, ������
Code2. Modified ������ and ������ computing.
Ifabalancingset’sweightisintherange,itis movedtotheotherpartition.Thenextmodi ication wastheconditionforexecutingthe Balance proce‐dure,whichpreventstheformationofscatteredareas. The Balance proceduregreedilychoosesverticeswith thehighesthelpfulness.Thesearealwaysvertices fromabiggerpartition.Itdoesnotmovethewhole weightdifferencebetweenthepartitions;insteadon eachexecution,itmovesonlyapercentageofthisdif‐ference.Inourcase,itwasaround10%oftheweight difference.
Makinglocalre inementscancausescatteredpar‐titionstoappear.Ascatteredpartitionisapartition thatisdividedintounconnectedsub‐areas.Thiscan becausedbyindivisibleareas,whichareusuallybig chunksofagraphthatcanbemovedinjustonestep ofthere inementalgorithm.Asimplesolutionisto indscatteredpartitions;identifythemain,biggest subarea;andjointheotherpartswiththeiradja‐centpartitions.Thisprocedureisexecutedaftereach re inement.
3.4.Partitioningintompartitions
Consideringmodernparallelhardwarearchitec‐tures‐whicharecomposedofmultiplenodes,each equippedwithmultiplecores‐requirestakinginto accountdifferencesinlocalandremotecommunica‐tion.Partitioningofagridforparallelprocessingon�� nodeswith �� coreseachshouldprovide �� subgrids, eachdividedinto��partitions.Thesimpleapproachof dividingthegridinto�� parts irstandthensplitting eachpartlatercannotbeusedherebecauseofthe indivisiblepartsofthegrid;asingleindivisiblepart mightbecomeoneofthe�� parts,preventingitsfur‐therdivisionitinto�� parts.Therefore,itisproposed tomergethe��⋅��divisioninto��partsinstead.
ThispartishandledbytheLAMweightedmatching withanadditionalgreedyalgorithm.First,afterthe partitioninginto��⋅��parts,thegraphisreducedto�� verticesusingtheLAMmatchingalgorithm.Afterthe reduction,eachvertexisassignedtoanewpartition. Next,thegraphisrestoredto��⋅��partitions,butthe �� partitionsyieldedbyLAMarekept.Atthispoint, ifnotallofthe �� partitionshavethesameamount ofsubpartitions,thegreedymethodisused: irst,the adjacentpartitionsarebalanced.Next,ifthereare nomoreimbalancedadjacentpartitions,butthere arestillsomeimbalances,thealgorithmchoosesthe twopartitionswiththehighestandlowestnumberof verticesandbalancesthemgreedily.Thisprocessis repeateduntilallthepartitionshaveapropersize.
Thissectionshowstheresultsofexperimentsper‐formedusingthepresentedmethod.Ineachexperi‐menttype,thesameinputwasprocessed100times, followedbyselectionofthebestresult(anapproach usedalsoin[7]).Twometricswereusedtodetermine theoutputquality:
‐ Edge-cut:thelengthoftheborderbetweenparti‐tions.
‐ Sizeimbalance:theinequalityoftheresultingpar‐titionsizes.Theexcludedareasarenotcountedin thesizeofthearea.Thisinequalityisexpressedas thestandarddeviationofallpercentagepartition shares,toallowthemetricstobecomparedregard‐lessofthetotalgridsize.
4.1.Partitioninginto ��.�� areas
(a) Inputlayout.
(c) Excludedcellsremoved; edge‐cutmetric.Edge‐cut: 347.Sizeimbalance: 1.2042
(b) Excludedcellsremoved; sizeimbalancemetric.
Edge‐cut: 392.Size imbalance: 0.2541
(d) Excludedcellsnot removed;sizeimbalance metric.Edge‐cut: 908.Size imbalance: 0.0651
(e) Excludedcellsnot removed;edge‐cutmetric.
Edge‐cut: 739.Size imbalance: 0.2649
Figure4. Resultsofabuildingfloor‐planpartitioning.
Inthe irstexperiment,thegridisabuilding loor plan,withseveralroomsconnectedviahallways(see Fig. 4a).Thegridcontainsbothexcludedareasand indivisibleareas,whicharerepresentedasredand yellowpixels,respectively.Wallsandtheareaoutside ofthebuildingaremarkedasexcludedareas,while doorwaysaremarkedasindivisible.Thesizeofthe gridis100×100cells,anddividedinto16partitions. Theexperimentwasexecutedinfourvariants, determinedbytwoparameters:
‐ Excludedareaswereeitherassignedazeroweight orremovedfromthegraph.
‐ Themetricusedtodeterminethebestresultwas eitheredge‐cutorsizeimbalance.
(a) Partitionedinput.Edge‐cut: 925.Sizeimbalance: 0.4535.
(b) Mergedinto6 partitions.Edge‐cut: 667 Sizeimbalance: 1.0459
(c) Mergedinto4partitions. Edge‐cut: 624.Size imbalance: 1.0872
Figure5. Syntheticexampleofpartitioning.
Fig. 4 showstheinputandtheresultsofthepar‐titioning.Ineachcase,theinputconstraintswere preserved,i.e.,theexcludedareadidnotcause largeimbalancesinareasizes,andindivisibleareas remainedundivided.
Itiseasytoobservethatremovingtheexcluded cellsyieldedbetteredge‐cutmetricvalues(seeFig.4b andFig. 4c).However,itisalsoimportanttonotice thatalotofconnectionsareremovedfromthegraph, whichsigni icantlyreducestheabilityofdifferent areastobeconnected.Atthesametime,theborders thatwouldtouchexcludedareasononeorbothsides mighthavenocommunicationinthesimulationsys‐tem,asthoseareasdonottakeactivepartinthesimu‐lationbyde inition.Anotherinterestingpieceofinfor‐mationisthatpreservingtheexcludedcellsyielded muchbettersize‐imbalancemetricvalues(seeFig.4d andFig. 4e).Thismightbecausedbytheabilityto connectremoteareasviaapatchofzero‐weightcells thatdonotcausetheareatostopexpanding.
InoppositiontotheusualLAMalgorithmbehavior, whichtendstoyieldpartitionswithsmallerperimeter toarearatios,theuseofzero‐weightcellscausedmore elongatedshapestoemerge.Oneconsequenceisthata non‐excludedareatakingpartinthesimulationmight becomedisconnectedwithinasinglepartition‐thisis easiesttoobservewiththeredpartitioninFig.4d.
Theconclusionsfromthisexperimentareevidence infavorofremovingtheexcludedareasfromthegraph entirely.Itleadstobetterdivisionoftheactual,used partsofthegrid.
4.2.Partitioning ���� areasinto �� areas
Inthesecondexperiment,thegivenpartitioning into ��⋅�� areaswaspartitionedinto �� areas.This operationisstrictlyconnectedtotheunderlyingidea ofpartitioningthegridforparalellizationofcomputa‐tions.Inthescenarioinwhichthesimulationwillbe executedusing �� nodeswith �� coreseach,the irst stepcreatesthepartitionsforeachcore,whilethis stepassignsthemtothenodes.
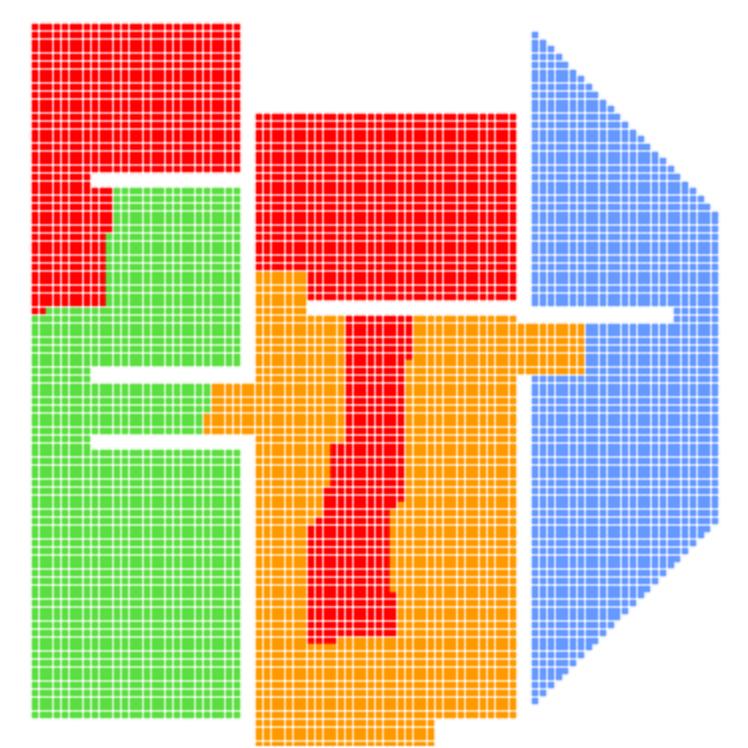
(a) Partitionedinput. (b) Mergedoutput.
Figure6. Planofbuildingfloorexampleofpartitioning. Edge‐cut: 200.Sizeimbalance: 1.6641
Thisexperimentwasperformedusingtwoexam‐plescenarios.The irstoneisasyntheticexample,in whichagridofsize100×100wasalreadypartitioned into24areas.Theexperimentconsistsoftwoexecu‐tionsofpartitioningthoseareasinto 6 and 4 larger areas(thus ��=6, ��=4 and ��=4, ��=6). Fig.5showstheresultsofthispartitioning.Theinput partitioning(seeFig.5a)hasabettersize‐imbalance metricvalue,butamuchworseedge‐cutmetricvalue thanbothoutputs.Thisistobeexpected,asdivisionof anyareacreatesanewborder,andthustheedge‐cut shouldbelargerforanypartitioningwithmoreareas. Atthesametime,anyinequalityinareasizesmight bemagni iedbycombiningthemintolargergroups. Bothoutputsshowsomedisconnectioninthe inal partitions,whichcontributestowardslargeredge‐cut, butthemetricvalueisimprovedinbothcases.Asthe interpretationofthismetricformergedoutputisthe amountofinter‐nodecommunication,theseresults areverypromising.
Thesecondscenarioisabuilding loorplan,based onthesamelayoutasshowninthe irstexperiment (seeFig.4a).Thesizeofthegridis100×100,��=4, ��=4.Fig.6showstheresultsofthisexperiment.The mostimportantqualityoftheresultingdivisionisthat itconsistsof 4 areasofalmostidenticalsizes,which canbefurtherdividedinto16smallerareas,enforcing therulesoftheexcludedandindivisiblecellsinboth cases.Notallareasarecontinuous‐theredareain Fig.6bisdividedintothreeparts.However,itcanbe easilyshownthatthereisnopartitioningoftheinput thatavoidsfragmentationintheresultingpartitions. TheredareainFig. 6a isolatestwobranchesofthe loorplan‐onecontainingthreepartitions,andthe othercontainingtwo.Mergingtheredareawithany ofthegroupswillleavetheotherunabletoconnectto suf icientnumberofareastoforma4‐areagroup.
Theproposedalgorithmisprobabilistic,andas suchitissuitableforparallelprocessingtoproduce betterresults.Repeatingtheprocessingonthesame inputcanbeeasilyparallelized.Asthepartitioning itselfimpliesthatthesimulationisintendedtobe executedonmultiplecores,usingthoseresourcesas earlyasduringpartitioningseemsadvisable.Itisalso possibletoperformmorerepetitionsofthe irststage followedbymultiplerepetitionsofthesecondphase foreachresult,asthesecondphaseismuchlesscom‐putationallydemanding.However,thequalityofthe initialpartitioningwillhavealargeimpactonthe secondphase.Ifareasizesarebalanced,themerging resultsarelikelytobebalancedaswell.Therefore,it isadvisabletoperformmorerepetitionsofthe irst stageandasimilarnumberofrepetitionsofthesecond phaseforeachresult,asopposedtogeneratingfewer resultsfromtheinitialphaseandmorerepetitionsof thesecondone.
Unfortunately,itisalsopossibletoobtainparti‐tioningcontainingunconnectedareaswithinasingle nodepartition.However,forsomeinputssuchbehav‐iormightbeunavoidable.Thealgorithmpresented herecorrectlypreservestheexcludedandindivisible areaconstraints,whileatthesametimemaintaining thebalanced‐areadivisionandminimizingtheedge‐cutsize.Thiallleadstolesstimespentonwaitingfor othercoresto inishcomputationsandlowercommu‐nicationoverhead.
Theproposedmethodforpartitioninggrid‐based simulationmodelsprovidessatisfactoryresults.Itis designedasanextensionofanadvancedandef icient graph‐partitioningalgorithm;therefore,itprovides similarpartitioningqualityforsimpleenvironment shapes.Itisextendedwithproperhandlingofthe complexstructureofrealenvironmentshapesandthe possibilityofde iningindivisibleareas.Thedivision canalsobeoptimizedforlocalandremoteparallelism, takingintoaccountthearchitectureofcomputing nodesandcores.Asaresult,theproposedmethodcan provideinitialdivisionsofthesimulationmodelthat arebettertailoredtotheneedsofreal‐worldsimula‐tions.
Furtheroptimizationoftheimplementationofthe algorithm[18]isplannedinordertoreducethetime requiredtopartitionagivengrid.Anothermodi ica‐tionofthemethodunderconsiderationwouldallow de iningdifferentweightsofthegridcells.Thiscould re lectrealsimulationcostsmoreaccurately,provid‐ingabetter‐balancedworkload.
AUTHORS
JakubZiarko –Poland,e‐mail: kuba.ziarko@gmail.com.
MateuszNajdek –AGHUniversityofKrakow,A. MickiewiczaAv.30,30‐059Kraków,Poland,e‐mail: najdek@agh.edu.pl.
WojciechTurek∗ –AGHUniversityofKrakow, A.MickiewiczaAv.30,30‐059Kraków,Poland,
https://skos.agh.edu.pl/osoba/wojciech‐turek‐6937.html,e‐mail:wojciech.turek@agh.edu.pl.
∗Correspondingauthor
ACKNOWLEDGEMENTS
Theresearchpresentedinthispaperwasfundedby theNationalScienceCentre,Poland,underthegrant no.2019/35/O/ST6/01806.
References
[1] S.T.BarnardandH.D.Simon,“Fastmultilevel implementationofrecursivespectralbisection forpartitioningunstructuredproblems”, Concurrency:PracticeandExperience,vol.6,no.2,1994, pp.101–117.
[2] M.BergerandS.Bokhari,“Apartitioningstrategy fornonuniformproblemsonmultiprocessors”, IEEETransactionsonComputers,vol.C‐36,1987.
[3] T.Chan,J.R.Gilbert,andS.‐H.Teng, Geometric spectralpartitioning,Citeseer,1994.
[4] C.M.FiducciaandR.M.Mattheyses,“Alinear‐timeheuristicforimprovingnetworkpartitions”. In: Proceedingsofthe19thDesignAutomation Conference,1982,pp.175–181.
[5] G.KarypisandV.Kumar,“Afastandhighqual‐itymultilevelschemeforpartitioningirregular graphs”, SIAMJournalonscienti icComputing, vol.20,no.1,1998,pp.359–392.
[6] G.L.Miller,S.Teng,W.Thurston,andS.A.Vava‐sis.“Automaticmeshpartitioning”.In:A.George, J.Gilbert,andJ.Liu,eds., GraphsTheoryand SparseMatrixComputation,TheIMAVolumes inMathematicsanditsApplication,pp.57–84. Springer‐Verlag,1993.Vol56.
[7] B.MonienandS.Schamberger,“Graphpartition‐ingwiththepartylibrary:Helpful‐setsinprac‐tice”.In: 16thSymposiumonComputerArchitectureandHighPerformanceComputing(SBACPAD2004),2004,pp.198–205.
[8] K.Nagel,“Cellularautomatamodelsfor transportationapplications”.In:S.Bandini, B.Chopard,andM.Tomassini,eds., Cellular Automata,Berlin,Heidelberg,2002,pp.20–31.
[9] M.Paciorek,A.Bogacz,andW.Turek,“Scalable signal‐basedsimulationofautonomousbeingsin complexenvironments”.In: InternationalConferenceonComputationalScience(ICCSA2020), 2020,pp.144–157.
[10] M.PaciorekandW.Turek,“Agent‐basedmodel‐ingofsocialphenomenaforhighperformance distributedsimulations”.In: InternationalConferenceonComputationalScience(ICCSA2021), 2021,pp.412–425.
[11] A.Pothen,H.D.Simon,andK.‐P.Liou,“Partition‐ingsparsematriceswitheigenvectorsofgraphs”, SIAMJournalonMatrixAnalysisandApplications, vol.11,no.3,1990,pp.430–452.
[12] A.Pothen,H.D.Simon,L.Wang,andS.T. Barnard,“Towardsafastimplementationof spectralnesteddissection”.In: Supercomputing’92:Proceedingsofthe1992ACM/IEEEConferenceonSupercomputing,1992,pp.42–51.
[13] R.Preis,“Lineartime1/2‐approximationalgo‐rithmformaximumweightedmatchingingen‐eralgraphs”.In: AnnualSymposiumonTheoreticalAspectsofComputerScience,1999,pp.259–269.
[14] S.F.RailsbackandV.Grimm, Agent-basedand individual-basedmodeling:apracticalintroduction,PrincetonUniversityPress,2019.
[15] S.Schamberger,“Improvementstothehelpful‐setalgorithmandanewevaluationschemefor graph‐partitioners”.In:V.Kumar,M.L.Gavrilova, C.J.K.Tan,andP.L’Ecuyer,eds., Computational ScienceandItsApplications(ICCSA2003),Berlin, Heidelberg,2003,pp.49–53.
[16] W.Turek,L.Siwik,andA.Byrski,“Leveraging rapidsimulationandanalysisoflargeurbanroad systemsonhpc”, TransportationResearchPartC: EmergingTechnologies,vol.87,2018,pp.46–57.
[17] C.WalshawandM.Cross,“Meshpartitioning:A multilevelbalancingandre inementalgorithm”, SIAMJournalonScienti icComputing,vol.22, 2004.
[18] J.Ziarko.“Gridpartitioningsourcecode”. https: //github.com/WKD622/grid‐partitioning/tre e/master.[Online;accessed01‐20‐2024].
ADVANCEMENTSININDUSTRY‐AGRICULTURE5.0:UTILIZINGUNMANNEDGROUND ANDAERIALVEHICLESFORSUSTAINABLEPRECISIONAGRICULTURE
ADVANCEMENTSININDUSTRY‐AGRICULTURE5.0:UTILIZINGUNMANNEDGROUND ANDAERIALVEHICLESFORSUSTAINABLEPRECISIONAGRICULTURE ANDAERIALVEHICLESFORSUSTAINABLEPRECISIONAGRICULTURE
Submitted:16th October2023;accepted:4th December2023
IsmailBogrekci,PinarDemircioglu
DOI:10.14313/jamris‐2025‐034
Abstract:
Inthisstudy,weunderscorethesignificanceof incorporatingUnmannedGroundVehicles(UGVs) andUnmannedAerialVehicles(UAVs)inagricultural practices,highlightingtheirpotentialtomitigate environmentalimpact,preserveresources,andfortify foodsecurity.Theresearchexploresthechallenges andfuturepossibilitiesassociatedwiththistechnology, aimingtocontributetoamoresustainableand productiveagriculturalsector.TheintegrationofUGVs andUAVsintoIndustry‐Agriculture5.0marksatransition towardsadata‐drivenandenvironmentallyconscious farmingapproach,promisingamoresustainablefuture foragriculture.
Thestudyalsoinvolvesthedevelopmentandtesting ofaprototypeagriculturalrobotequippedwithsensing capabilities.Theintegrationencompassesmechanical, electronic,andsoftwarecomponents,withthedesign craftedusingAutodeskInventorandSolidWorks.Elec‐troniccircuitsarepreciselydesignedinProteus,andsoft‐waredevelopmentiscarriedoutinMatlabandVisual C++.Thechassisisconstructedfromaluminumandsteel, andrigoroustestinghasbeenconductedatAyd��nAdnan MenderesUniversityandManisaViticultureResearch Institute.Therobotoperatesonelectricalpower,offering an8‐hourworkingcapacitywitha49‐minuterecharge time.Notably,itfeaturesindividualmotorsforeach wheel,employsadifferentialdrivemethod,andboasts 34.85horsepower.
Keywords: Industry‐Agriculture5.0,UGV,UAV,Sustain‐ability,RTKGPS,Data‐drivenDecisionMaking
WiththeadventoftheFourthIndustrialRevo‐lution,theintegrationoftechnologyandagriculture hasgivenbirthtowhatisnowtermedIndustry‐Agriculture5.0(IA5.0).Theevolutionofcontem‐poraryfarmingpracticesisde inedbyaprofound shift,placingtechnologicalinnovationatthecoreof effortstoachievesustainability,precision,andheight‐enedproductivity.Withinthistransformativeland‐scape,theessentialdeploymentofUnmannedGround Vehicles(UGV)andUnmannedAerialVehicles(UAV) emergesasacornerstoneintherealizationofIA5.0.
Inmodernagriculture,theadventofIA5.0is signi iedbythecriticalroleplayedbytechnologi‐caladvancementsinensuringsustainableandpre‐cisefarmingpractices.TheusageofUGVandUAV asintegralcomponentsofIndustry‐Agriculture5.0is exploredinthisstudy,withafocusontheirapplica‐tionsinsustainableprecisionagriculture.UGVsand UAVshavebecomeindispensabletoolsforthemod‐ernfarmer,facilitatingdata‐drivendecision‐making, optimizedresourcemanagement,andincreasedcrop yields.Inthiscontext,theyperformadiverserangeof tasks,includingsoilandcropmonitoring,pestcontrol, irrigationmanagement,andyieldprediction.Their abilitytogatherreal‐timedatathroughsensorsand imagingtechnologiesequipsfarmerswithvaluable insights,enhancingtheef iciencyandsustainabilityof agriculturaloperations.
Roboticsisrapidly indingitsplaceineveryday lifewiththeadvancementoftechnology.Agricultural robotshavebeendevelopedbyvariousuniversities andinstitutes,andeffortstocommercializethese robotsareongoing.Oneofthemainreasonsforthe delayedadoptionofrobotsintheagriculturesectoris thehighlevelofvariabilityinagriculturalpractices, stemmingfromfactorslikecroptypes,soil,water, andclimateconditions.Thesevariationssigni icantly impactthesuccessofrobotictechnologies,limiting theirwidespreaduseintheagriculturalsector.
Inthisstudy,weexploretheintegrationofUGVs andUAVsintotheagriculturallandscape.These autonomousvehicles,equippedwithstate‐of‐the‐art sensorsandimagingtechnologies,haveemergedas indispensabletoolsformodernagriculture.Theirrole extendsbeyondmechanization,offeringfarmersthe meanstomakedata‐informeddecisions,optimize resourceallocation,andmaximizecropyields.Such capabilitiesunderlinethepotentialforsustainable andprecisefarmingpracticesinaneramarkedby demandforagriculturalproducts.
Thisarticleexploresdiversetasksandapplications undertakenbytheseintelligentmachines,including butnotlimitedtosoilandcropmonitoring,pestman‐agement,irrigationcontrol,andpredictiveanalytics foryieldoptimization.Thereal‐timedatatheycol‐lectempowersfarmerswithinvaluableinsights,fos‐teringamoreef icientandsustainableagricultural ecosystem.
Thisstudynotonlyunderscoresthesigni icance ofincorporatingUGVsandUAVsintoIA5.0butalso examinesthebroaderimplicationsofthisintegration. Beyondimprovingagriculturalef iciency,itoffers prospectsforenvironmentalconservation,resource preservation,andglobalfoodsecurity.However,the journeyisnotwithoutitschallengesanduncertain‐ties,whichwewilladdressinourcomprehensive explorationofthistechnology.
TheintegrationofUGVsandUAVsintoIA5.0repre‐sentsacriticalshifttowardsdata‐driven,environmen‐tallyresponsiblefarming.Itembodiesthepromise ofamoresustainableandproductivefutureforthe agriculturalsector,servingasanexampleofoptimism inaddressingthepressingchallengesfacingtheglobal foodsupplychaininthe21stcentury.
Usingadvancedtechnologies,robotshavethe potentialtotransformprecisionpesticidespraying applicationsintothe ieldofprecisionfarming.Given theneedfortargetedpesticideapplicationinagricul‐turalpestcontrolandtheopportunitiespresentedby moderntechnology,aninnovativepestcontrolsystem hasbeendevelopedforprecisepesticidespraying.The primarygoalofthisstudyistodesignandimplement aprecisionpesticidesprayingsystemthatutilizesa synchronizedcombinationofUGVsandUAVs,offering analternativetotraditionalsprayingmethods.
Theincreasingnumberofcontemporaryliterary trendsunderscoresthecriticalnecessityforresearch inthisever‐evolving ield.Agriculture5.0integrates advancedtechnologiessuchasArti icialIntelligence (AI),InternetofThings(IoT),andMachineLearn‐ing(ML)tosupportagriculturalproductivity,sustain‐ability,andinformeddecision‐making.Thistransfor‐mationautomatesdiversetasks,encompassingcrop protection,yieldprediction,andpestcontrol,with theassistanceofUGVandUAV.However,despiteits promisingpotential,Agriculture5.0faceschallenges relatedtoadaptabilityandconcernssurroundingdata privacy[1,2].
Traditionalapproachesalonefallshortinprovid‐ingcomprehensiveprotectionforagricultural ields againstpestsanddiseases.It’sevidentthatrely‐ingsolelyonconventionalsprayingtechniquesnot onlydiminishestheef iciencyofcropyieldsbutalso createsdetrimentaleffectsonagriculturalecosys‐tems.Thesemethods,characterizedbytheirexcessive chemicalusage,bearadverseconsequencesonsoil quality,planthealth,andthevitalityofplantroots. Furthermore,traditionalmethodsproveinadequate whenappliedtothe ieldofprecisionfarming.Acom‐parisonbetweenconventionalandprecisionfarm‐ingapplicationsispresentedinthefollowingtable, illustratingthestarkdisparitiesbetweenthesetwo approaches[3,4].
Intraditionalfarming,the ieldisperceivedasa homogeneousarablesite,leadingtouniformpractices innutrientmanagement,plantprotection,sowing,and machineoperation.
Plantstockismanagedasauni iedentity,with decision‐makingin luencedbyrelativelylimiteddata. Incontrast,precisionfarmingtreatsthearablesite as ield‐levelheterogeneous,usingGPSandpoint‐likesampletakingforprecisenutrientandplant protectionmanagement.Sowingpracticesareplant speciesandvariety‐speci ic,whilemachineoperation isadjustedtothesite’suniqueconditions.Plantstock isorganizedintohomogeneousblocks,anddecision‐makingbene itsfromawealthofdata,resultingin moreinformedandef icientpractices.
Agriculturaltechnologyencompassesawidearray offunctions,spanningprimaryoperations,cropmon‐itoring,precisionagriculture,livestockmanagement, irrigationcontrol,weedmanagement,soilsampling, harvesting,fertilizerapplication,anddatacollection. Thesetechnologicaladvancementsintroduce lexi‐bility,minimizeenvironmentalfootprints,holdthe potentialtoreducelabordemands,andcanresultin substantiallong‐termcostef iciencies.Effectiveinte‐grationwithotheradvancedtechnologiesiscriticalfor farmmanagement,amplifyingoverallef iciencyand sustainabilityincontemporaryagriculture[5].
Opendataresources(Table 2)playakeyrole inadvancingsmartagriculturebyprovidingvaluable informationtofarmersandresearchers.Theseopenly accessibledatasetsencompassawiderangeofagri‐culturalaspects,fromcropproductionandclimate monitoringtosoilqualityandpestcontrol.Thisdata‐drivenapproachservesasacatalystforempowering farmerstooptimizetheirfarmingtechniqueswhile supportingtheagriculturesector.Thisstudyexplores thediverselandscapeofopendatasourcesinthe scopeofsmartagriculture,highlightingtheirsigni i‐canceinenhancingsustainablefarmingpracticesand informeddecision‐makingwithintheagriculturalsec‐tor.
EmbracingtheeraofAgriculture5.0involvesthe integrationoftransformativetechnologieslikearti‐icialintelligence(AI),theInternetofThings(IoT), andmachinelearning(ML)intotheagriculturalland‐scape.Theoverarchingobjectiveistonotonlybolster productivityandsustainabilitybutalsotore inethe veryessenceofdecision‐makingprocesseswithinthe sector.Agriculture5.0seekstousherinanewera ofautomationandscalabletechnologicalsolutions, effectivelymitigatingrisks,fortifyingsustainability, andempoweringpredictivedecision‐makinginagri‐culture[7,8–10].
Inthe ieldofcropprotection,AIandroboticshave wroughtarevolution,introducingautomationinto monitoringandenablingearlypestdetectionwhile deliveringpreciselytargetedtreatmentsforenhanced yieldsandsustainablefarmingpractices.Semantic recognitionnowswiftlyidenti iesthreats,andsophis‐ticatedalgorithms,bolsteredbymachinelearning capabilities,facilitatetimelyinterventions,ultimately enhancingcrophealth[7,11–14].
Table1. ComparisonofPrecisionFarmingandConventionalFarmingPractices
Feature
PrecisionFarming
ConventionalFarming Ef iciency
ResourceConservation
Data-DrivenDecision-Making
LaborRequirements
EnvironmentalImpact
InitialCosts
Complexity
Sustainability
Increasedef iciencythroughtech Loweref iciency
Minimizesresourceoveruse
Informeddecisionsthroughdataanalysis
Resource‐intensive
Experience‐baseddecisions
Reducedlaborneeds(automation) Labor‐intensive
Reducedenvironmentalimpact
Higherinitialcosts
Complexdatamanagement
Enhancedsustainability
Table2. OpenDataResourcesintheFieldofSmartAgriculture[6]
DataSource Description
USDANationalAgriculturalStatisticsService(NASS)Data
EuropeanSpaceAgency’sSentinelData
NOAAClimateData
GlobalOpenDataforAgricultureandNutrition(GODAN)
NASAEarthdata
FAOData
IoTSensorData
CropandSoilDatabases
AgriculturalResearchInstitutions
OpenWeatherMap
GovernmentAgriculturalPortals
Community‐GeneratedData
Recentyearshavewitnessedtheapplicationof variousMLtechniquesforcropyieldprediction, includingsupportvectorregression,k‐nearestneigh‐bormethods,andmore[7, 15–18].Deeplearning excelsatextractingkeycharacteristicstoenhance preciseyieldestimation,eveninresource‐constrained ruralareas[7,19].
Anexhaustiveanalysisfeaturedinreferences[7, 20]examinedthechallengesassociatedwiththe globalimplementationofsmartagri‐roboticsolutions. Thesedif icultiesencompassfactorssuchascrop diversity,theadaptabilityofrobotics,andcomplex decision‐making.Theproposedsolutioninvolveda transformativeshift,embracingadvancedtechnolo‐gieslikemachinelearning,computervision,andsen‐sornetworkstotransformsmartagri‐robotics.
Intelligentrobotsystemsinecologicalagriculture wereexplored,withafocusontheirroleinpest controlandsustainablefarming.Theintegrationof robotics,sensors,AI,andimagingtechnologyfosters precisepestmanagement,reducespesticideusage, andenhancesef iciency,allwhileaddressingconsid‐erationslikecostandcompatibilitywithexistingagri‐culturalpractices[7,21].
Environmentalconcerns
Lowerinitialcosts
Simplicityandfamiliarity
Reducedsustainability
Cropproduction,livestockstatistics,andagricultural informationintheUnitedStates
High‐resolutionsatelliteimageryforcropmonitoringand landuse
Weatherandclimatedata,includingforecasts,rainfall,and temperature
Opendatasetsrelatedtoagriculture,foodsecurity,and nutrition
Remotesensingdataformonitoringclimate,soilmoisture, andvegetation
Agriculturaldataandinformationonglobalfood productionandtrade
Sensordata,suchassoilmoistureandtemperature,from IoTdevicesin ields
Informationoncropyields,soilquality,andnutrientlevels
Datafromresearchinstitutionsoncroptrials,pest monitoring,andexperiments
Weatherdata,includingcurrentconditions,forecasts,and historicalrecords
Informationonfarmingpractices,subsidies,and agriculturalpolicies
User‐generateddatasharingexperiences,practices,and insights
Theessentialroleofrobotics,IoT,andAIin automatingagriculturewashighlighted,encompass‐ingapplicationssuchasautomatedharvesting,preci‐sionagriculture,andsmartirrigationsystems.These technologiesincreaseef iciency,productivity,and sustainability,withaspeci icemphasisondataana‐lyticsandmachinelearningforintelligentdecision‐making.Challengesinthisareaincludecost,scalabil‐ity,interoperability,anddataprivacy[7,22].
Furthermore,anoverviewofmachinelearningand emergingtechnologiesinprecisioncropprotection wasprovided,witharesoluteaimtodriveAgricul‐ture5.0.Theyfocusedontheircapacitytoenhance agriculture,promotesustainability,andoptimizecrop protectionpractices[7,23].
Asthedemandforef icientmonitoringand surveillancecontinuestoriseacrossdiversesettings, includingindustrialfacilitiesandpublicspaces,the adoptionofthermalUAVtechnologyhasgained substantialattention[24].Thermalimaging,as illustratedinFigure 1,isnowfrequentlyintegrated intoagriculturaldrones,providingauniqueaerial perspectiveof ieldsandlivestock.
Dronesequippedwiththermalcamerasenablefast andcomprehensivemonitoringofextensiveagricul‐turalareas[25].Moreover,withtheongoingadvance‐mentofthermalimagingtechnology,itsapplications inagriculturearecontinuallyexpanding.Byresearch‐ingintotheseagriculturalapplicationsofthermal imaging,farmersandagriculturalprofessionalscan harnessthefullpotentialofthistechnologytomake well‐informeddecisions,enhanceproductivity,and promotesustainablefarmingpractices.
BothUAVsandUGVsarepartofthegrowingtrend ofsmartfarming(Figure 2),wheretechnologyand data‐drivenapproachesareusedtooptimizeagricul‐turalpractices.Theseunmannedvehicleshavethe potentialtoincreaseef iciency,reducecosts,andpro‐motesustainabilityinagriculture.Sustainability,both intermsofresourceutilizationandlong‐termagricul‐turalviability,isacorefocusintheadoptionofthese technologies.Table3providesacomparisonbetween UAVsandUGVsinagriculture.Tabledataserveasa valuablereferencepointforfarmersandresearchers seekingtoevaluatethemostsuitableunmannedvehi‐clefortheirspeci icneedsforsmartfarming.
UAVsandUGVshaverevolutionizedagricultural practices,eachofferingdistinctadvantages.UAVs excelinlarge‐scaledatacollectionandcropmonitor‐ingfromabove,providingvaluableinsightsforpreci‐sionfarmingonexpansive ields.Ontheotherhand, UGVsdemonstrateef iciencyinproximity,enabling targeted,ground‐leveltaskslikeplanting,weed‐ing,andlocalizedcrophealthassessment.Decisions regardingtheuseofUAVsorUGVsinagriculture shouldbebasedonthespeci icneedsandobjectivesof thefarm,asbothtechnologiescontributesigni icantly tooptimizingef iciencyandsustainabilityinmodern farming.
UAVsandUGVshaverevolutionizedagricultural practices,eachofferingdistinctadvantages.UAVs excelinlarge‐scaledatacollectionandcropmon‐itoringfromabove,providingvaluableinsightsfor precisionfarmingonexpansive ields.Ontheother hand,UGVsdemonstrateeffectivenessinproximity tasks,enablingtargeted,ground‐levelactivitiessuch asplanting,weeding,andlocalizedcrophealthassess‐ment.DecisionsregardingtheuseofUAVsorUGVsin agricultureshouldbebasedonthespeci icneedsand objectivesofthefarm,asbothtechnologiescontribute signi icantlytooptimizingef iciencyandsustainabil‐ityinmodernfarming.
Inrecentyears,theapplicationofmachinelearn‐ingmodelshasrapidlytransformedtheagricultural landscape,leadingtodata‐drivenprecisionfarm‐ing.Theintegrationofadvanceddataanalyticsand machinelearningtechniquesintoagro‐ecosystems hasopenedpossibilitiesforoptimizingcropmanage‐ment,resourceutilization,andsustainability.
Frompredictingcropyieldsandidentifyingpest outbreakstoenhancingsoilqualityandenabling autonomousfarming,thesemodelsplayacrucialrole inrevolutionizingthewaywecultivateandman‐ageagriculturalresources.Byexploringthesediverse applications,wegaininsightsintohowtechnologyand data‐drivenapproachesarereshapingtheagricultural sector,pavingthewayformoreef icient,productive, andenvironmentallysustainablepractices.
3.MaterialsandMethod
Thisexperimentalstudyinvolvesthedesignand manufacturingofthevineyardrobot,whichisthen testedforfunctionalityinlaboratoryconditionsandin ieldconditions.
3.1.MechanicalDesign,Analysis,andManufacturing DesignsinASRobotwerecreatedusingInventor andSolidWorkssoftware,includingsketching,solid modeling,assembly,static/dynamicanalysis,techni‐caldrawings,andmanufacturingdrawings.Therobot hasbeendesignedtobeverylightweightforextended operationandeasymaneuverability.Itsdimensions havebeensettomakeitsuitableforuseinallvine‐yards.Additionally,awheeledversionoftherobotwas designedbymakingmodi icationsonlytothewalking components,withoutchangingthemainchassis(Fig‐ures3and4).Theseadditionalmodi icationsinterms ofelectronicsystemsandsoftwaredonotresultinany extracostortimedelay.
3.2.ElectronicDesign,Analysis,andManufacturing
Thisphaseencompassesthecreationandopti‐mizationofelectroniccircuitsthatgoverntherobot’s functionality,ensuringef icientandprecisecontrol. Theelectroniccircuitsoftherobotwerecreatedand simulatedusingProteussoftware.Circuitsthathad successfulsimulationsinProteusweremanufactured asPCBsandtestedonthemotors.Thedesignedcir‐cuitsincludedasinglemotordrivercircuit,twomotor drivercircuits(fordrivingthemotorsinlocomotion), andthreemotordrivercircuits(forcontrollingthe motorsintherobotarmusedforthesensingsystem) (Figures5–7).Motorcontrolwasbasedonthesignal receivedfromthejoystick.Whenthesystemwasset toautomaticmode,thejoystickwasdisconnected,and controlwasshiftedtoRTKGPSandStereoVision–basedcontrol.Additionally,ageneralinput‐outputcir‐cuitwasdesigned,andthePCBforthiscircuit,which hadasuccessfulsimulation,wasmanufactured.
3.3.SoftwareDevelopment
Thesoftwaredevelopmentphasewascarriedout usingtwodifferentapproaches.Intheinitialphaseof theproject,coordinates,includinglatitude,longitude, andelevation,wereobtainedforcontrollingtherobot usingSAFARsoftware.AfteracquiringRTKGPSdata, routeplanningwithinthevineyardwasperformed manually.
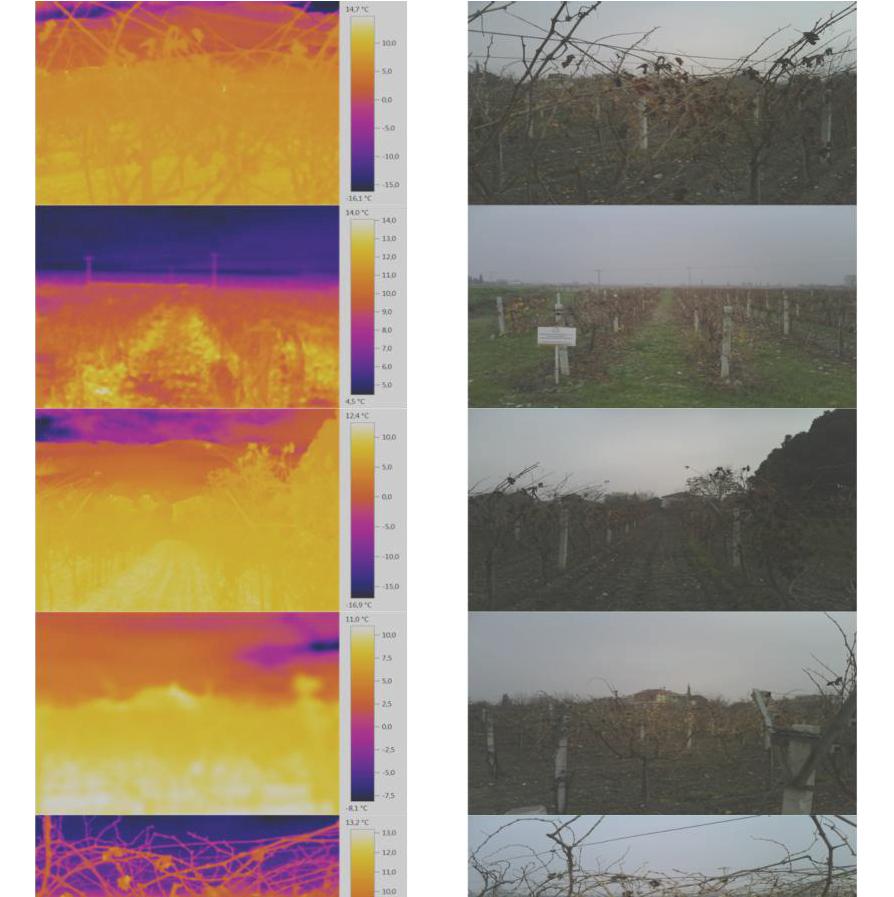

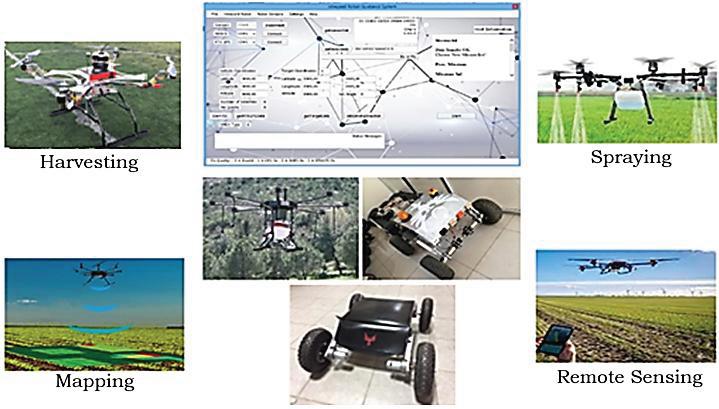
ThesecoordinateswerecomparedwithSAFAR coordinates.SoftwaredevelopmentforbothRTKGPS–controlledmovementandStereoVision–basedcontrol oftherobotwasaccomplishedusingVisualC++.
Therobotplatformwasoperatedinmanualand automaticmodeswithinthevineyard(Figures 8–12).Itfunctionedautomaticallythroughtwodiffer‐entmethods.Theplannedsystemoperatesbasedon machinevisionandRTKGPScoordinatecontrol.Pre‐liminarysoftwareworkandsimulationtestingfor theRTKGPS–controlledsystemaredepictedinFig‐ures13–17.
Table3. ComparisonofUAVsandUGVsinAgriculturalFarmOperations
Feature
Mobility
DataCollection
FieldCoverage
Real‐timeMonitoring
Accessibility
UAVs(UnmannedAerialVehicles)
Operateintheair,offeringabird’s‐eyeview oftheentire ield.
Usefulforaerialimaging,cropmonitoring, andcapturingvisualandmultispectraldata.
Cancoverlargeareasef icientlyand quickly,makingthemidealforlargefarms.
Canprovidereal‐timedataandimmediate insightsfromabove.
Easilyaccessdif icult‐to‐reachareasand ieldswithvariousterrains.
CropHealthAssessment Ef icientformonitoringcrophealth, identifyingstress,andassessingoverall ieldconditions.
DataAccuracy
Cost
Versatility
Limitations
Offershigh‐resolutionimaginganddata collectioncapabilities,especiallywith advancedsensors.
UAVscanbemorecost‐effectivefor large‐scalesurveillanceofvastareas.
Well‐suitedforscoutingandmonitoring tasksbutnotforphysicalinterventionor soilmanipulation.
Affectedbyweatherconditionsand regulationsrelatedtoairspace.
Table4. ComparisonofUAVsandUGVsinAgriculturalFarmOperations
MachineLearningModel
UGVs(UnmannedGroundVehicles)
Operateontheground,movingatground levelandtypicallycoveringlessarea.
Suitedforclose‐upinspections,soil sampling,andcarryingsensorsatground level.
Betterforsmaller,precisiontasksandfor navigatingthroughtighterspaces.
Mayrequireadditionaldataprocessingor timetoconveyground‐levelinformation.
Limitedbyobstaclesandmayface challengesonuneventerrain.
Usefulforproximityanalysis,detecting plantdiseases,andassessingsoilquality.
Mayhavelimitationsincapturing high‐resolutiondata,dependingonthe UGV’ssetup.
UGVscanbecost‐effectiveforspeci ic, targetedtasksandsmallerplots.
Canperformtaskslikeweeding,planting, andsoilsamplingdirectly.
Constrainedbythelimitationsofground mobilityandpotentialobstacles.
UseCaseinAgro-Ecosystems
LinearRegression Cropyieldprediction,soilqualityassessment DecisionTrees Pestdetection,cropdiseaseidenti ication RandomForest Cropclassi ication,yieldforecasting SupportVectorMachines Weeddetection,precisionagriculture NeuralNetworks Weatherforecasting,cropmonitoring,yieldprediction K‐NearestNeighbors Soilhealthassessment,precisionagriculture NaiveBayes Diseaseriskassessment,cropdiseaseidenti ication Clustering(K‐Means) Cropgrouping,yieldpatternanalysis PrincipalComponentAnalysis(PCA) Dimensionalityreductionforfeatureextraction LongShort‐TermMemory(LSTM) Time‐seriesdataanalysis,weatherprediction ConvolutionalNeuralNetworks(CNN) Image‐basedpestanddiseasedetection ReinforcementLearning Autonomousfarming,autonomousmachinerycontrol
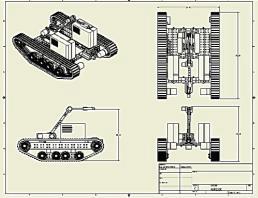
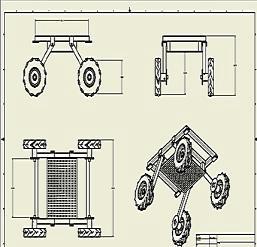
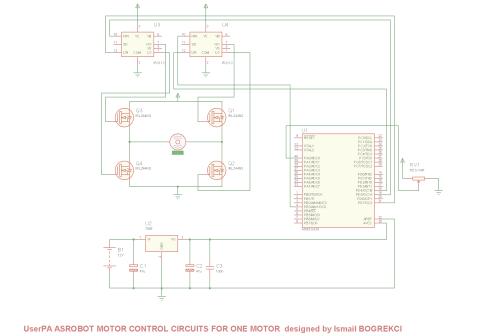
CircuitforMotorControl
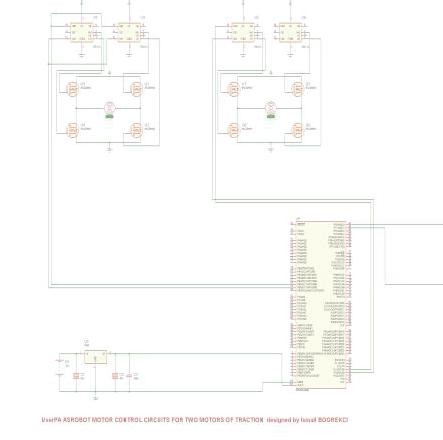
Figure6. CircuitforControllingTwoMotorsfor Locomotion
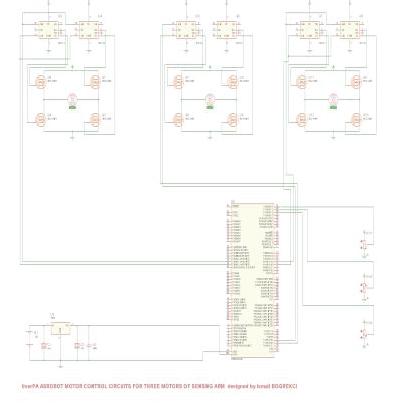
Figure7. CircuitforControllingTwoMotorsfor Locomotion

Figure8. DeterminationofAgriculturalLand[Safar]
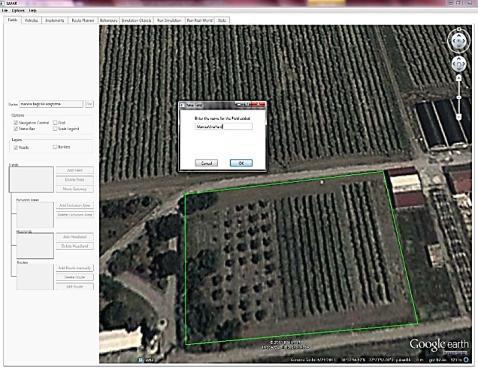
Figure9. DrawingandDefiningFieldBoundaries[Safar]
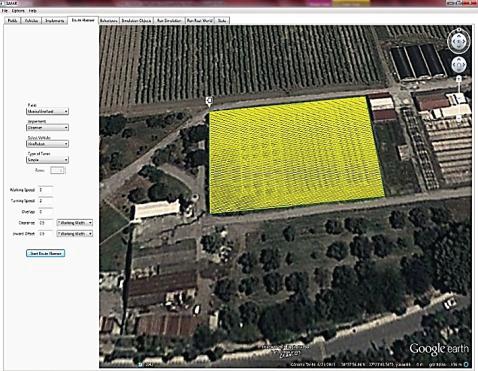
Figure10. DeterminationoftheRoute,AddingRobots andEquipment[Safar]
RunningsimulationwithSafarisacrucialstep intestingthefunctionalityandperformanceofthe robotinavirtualenvironment.Thisphaseallowsus toexplorevariousscenariosandassesshowtherobot respondstodifferentconditionsandchallenges.

RunningtheSimulation[Safar]
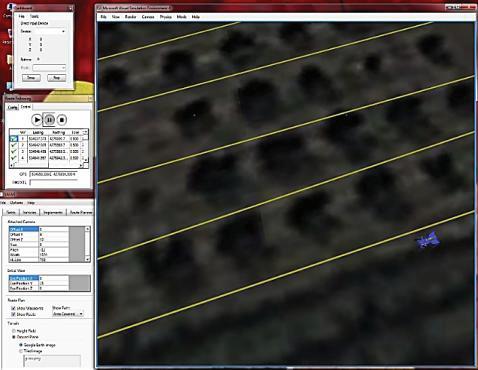
Figure12. SystemOperationThroughIntegration[Safar]

Figure13. Office‐BasedTestingofDistance MeasurementUsingStereoImaging
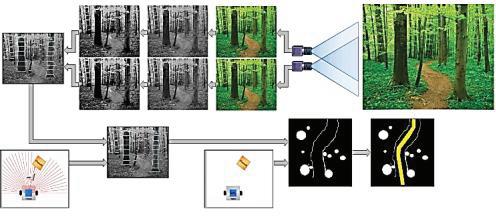
Figure14. ResultsofTopographyDeterminationUsing StereoImagingStudies
Figure15. RTK‐GPSRouteDeterminationandPlanning Study
Figure16. SimulationofRobotManeuveringon RTK‐GPSRouteDeterminationandPlanning
Figure17. SimulationofRobotManeuveringonRTK‐GPS RouteDeterminationandPlanning‐RouteNumbers
3.4.FieldStudiesandVineyardTrials
Thefollowingprocedureshavebeenplannedtobe followedforvineyardtrialsattheManisaViticulture ResearchStation.Withinthescopeoftheresearch,the grapevarieties“SultaniÇekirdeksiz”,“SiyahKiºmiº”, “CrimsonSeedless”,and“Cardinal”weregraftedonto 1103Paulsenrootstock.
3.5.Method
Theresearchwasconductedwiththreereplica‐tions,followingarandomizedcompleteblockdesign. Eachreplicationcomprisedsixgrapevines.Tomitigate potentialsideeffectsresultingfromvarioustreatment applications,edgeeffectrowsweredeliberatelyleftat thebeginningandendoftheexperimentalsetup.

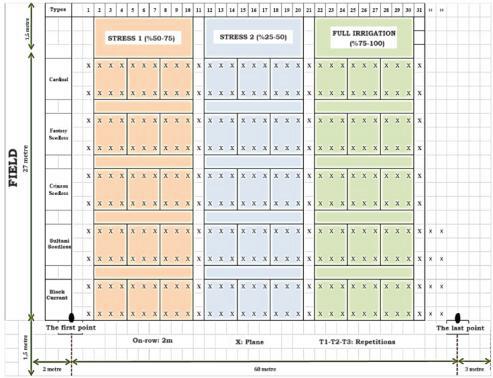
Thisstrategicarrangementaimedtoensureacom‐prehensiveandaccurateassessmentofthetreatments applied.Thevinesusedintheexperimentweretube‐grownandplantedinrowswitharowspacingof2.00 metersandaninter‐rowspacingof3.00meterson landownedbytheManisaViticultureResearchStation Directorate.Figure19depictstheexperimentaldesign forthisstudy.
Thestudyinvolvedwaterstressapplicationsat threedifferentlevels:fullirrigation(control),stress 1,andstress2.Accordingly,theavailablesoilmois‐turecontentintheplantrootzonewasmaintained at75–100%forthecontrolgroup,50–75%forstress 1,and25–50%forstress2applications.Subsurface dripirrigationwasusedastheirrigationmethodin thestudy.Dripirrigationlateralswereburied40cm deep.Foreachapplication,awatermeterandvalve wereinstalledtocontrolwater,andthesuppliedwater wasdistributedtotheplantsthrough20mmdiam‐eterpipes.Thepipeswereequippedwithpressure‐regulatedemitterswitha lowrateof3.5litersper hour,andtheemitterspacingwassetat40cm.Lat‐eralswereplacedintherowcenterandseparatelyfor eachapplication(3intotal).

Soilmoisturecontentwasmonitoredthroughout theseasonusingpro ileprobes(Figure 20).Pro ile Probestypicallyconsistofmultiplesensorsatvarious depthsalongaprobe,orproberodsthatareinserted intothesoil.Thesesensorsmeasureparameterslike soilmoisturecontent,electricalconductivity,andtem‐perature.
Inthiscontext,foreachreplicationconcerning thetopicstobeapplied,atubeattachedtoapro ile probewasplaced,andsoilmoistureateffectiveroot depthwasregularlymonitoredthroughoutthesea‐son.Basedonthemeasuredvalues,theamountof usefulsoilmoistureattheeffectiverootdepthwas calculated,andirrigationwasperformedaccordingly. Irrigationwascarriedoutasfollows:
‐ Fullirrigation(control):Irrigationwouldbetrig‐geredwhentheusefulsoilmoistureattheeffective rootdepthreducedby25%,maintainingsoilmois‐turelevelsbetween75‐100%.
‐ Stress1application:Irrigationwouldbetriggered whentheusefulsoilmoistureattheeffectiveroot depthreducedby50%,maintainingsoilmoisture levelsbetween50‐75%.
‐ Stress2application:Irrigationwouldbetriggered whentheusefulsoilmoistureattheeffectiveroot depthreducedby75%,maintainingsoilmoisture levelsbetween25‐50%.
Soilmoisturewasmaintainedwithinthespeci‐iedlevelsforeachtopicthroughouttheseason.For thispurpose,soilmoisturewascontinuouslymoni‐toredusingpro ileprobes,andirrigationwasadjusted accordingly.Additionally,leafwaterpotentialvalues weremeasuredusingaScholanderPressureCham‐ber(Figure 21)todeterminethetimingofirrigation andtoobservetheplant’swaterstatusunderstress conditions.
AportableScholanderPressureChamber
Thetrialswereconductedinadesignatedareaat theManisaViticultureResearchInstitute.Soilanalysis resultsfortheselectedareaareprovidedinTable5.
Thecreationofavineyardrobotprototypestands asanachievementinthetrajectoryofthisresearch. Thesubsequentperformancetestingofthevineyard robotprototypeservesasacrucialstepinunlocking theadvantagesofautomationandroboticsinagricul‐ture,ultimatelyenhancingproductivityandendorsing sustainablefarmingpractices.
Theprototypeunderwentacomprehensivepro‐cess,includingdesign,manufacturing,andthorough testingacrossdiverseparameters.Thesetestswere instrumentalinre iningtherobot’scapabilitiesand preventivelyaddressinganypotentialchallenges, aligningitsperformancewiththepredetermined projectobjectives.Theintricaciesoftherobotplat‐form,includingdetailedmechanicalanalysisandspec‐i ications,aremeticulouslypresentedinFigures 22 through46,offeringacomprehensiveinsightintothe robot’sdesignandfunctionality.
Inthisstudy,theprocessofobtainingand recordingreal‐timekinematicglobalpositiondatais explained,usingthePiksiRTKGPSdeviceacquired fromSwiftNavigation(Figure 36).RTKGPS,or Real‐TimeKinematicGlobalPositioningSystem,isa highlyprecisesatellitenavigationtechnologyusedfor applicationsthatrequirecentimeter‐levelaccuracy. It’swidelyutilizedin ieldssuchassurveying, precisionagriculture,construction,andautonomous vehiclenavigation.
TheRTKGPSdatawasobtainedintwostages. Inthe irststage,standardGPSdatawasacquired forbothPiksidevices,verifyingtheaccuracyofthe devices.
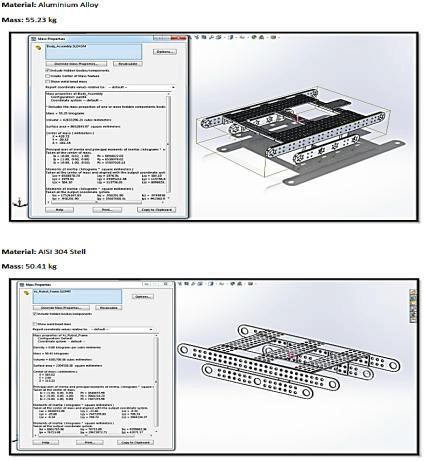
Thedesignoftherobotplatform,itscenterof gravity,anddimensionalspecifications
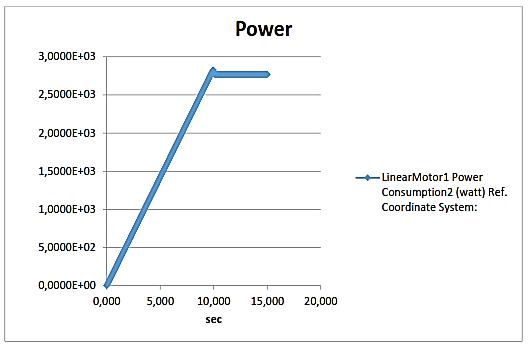
DynamicalSimulationResultsoftheRobot (Power)
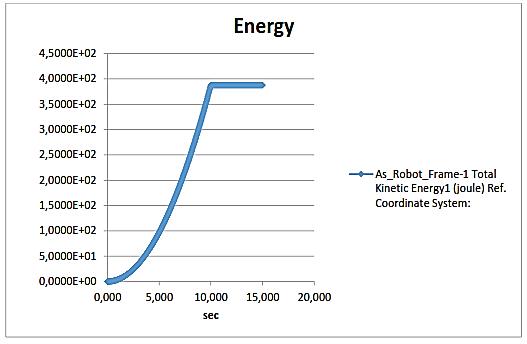
Figure24. DynamicalSimulationResultsoftheRobot (Energy)
Inthesecondstage,RTKGPSdatawasobtainedby comparingthesatellitesignalsacquiredbythePiksi devicescapableofwirelesscommunication.Thetests conductedinthesestagesandtheprocessesofobtain‐ingpositiondataaredescribedbelow.
Table5. ComparisonofUAVsandUGVsinAgriculturalFarmOperations
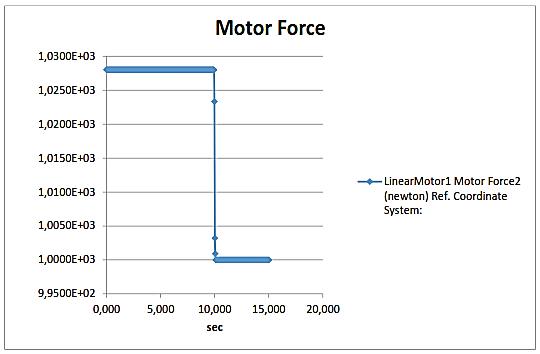
Figure25. DynamicalSimulationResultsoftheRobot (MotorForce)
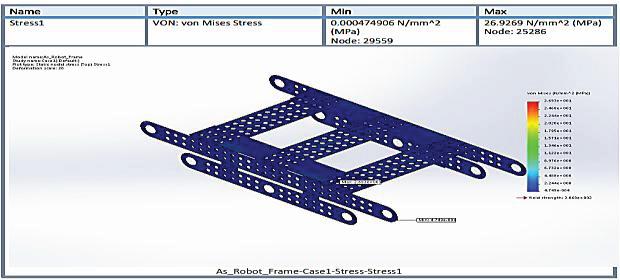
Figure26. StaticAnalysisResultsoftheRobot(Stress)
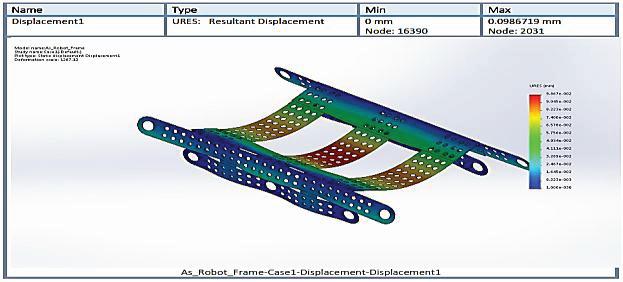
Figure27. StaticAnalysisResultsoftheRobot (Displacement)
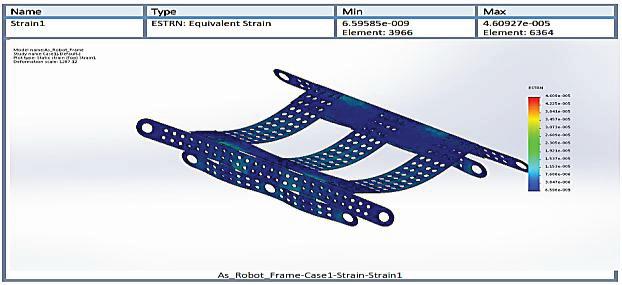
Figure28. StaticAnalysisResultsoftheRobot(Strain)
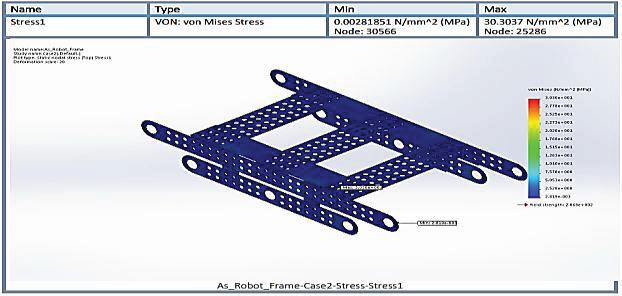
Figure29. DynamicAnalysisResultsoftheRobot (Stress)
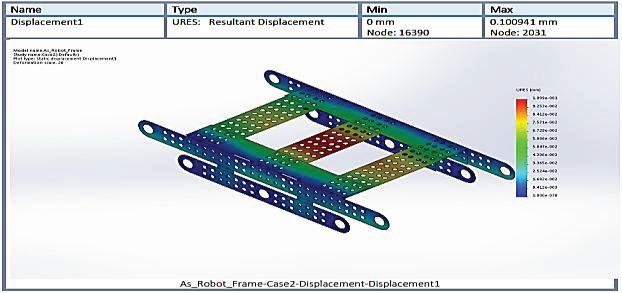
Figure30. DynamicAnalysisResultsoftheRobot (Displacement)
ASinglePointPosition(SPP)testisabasicposi‐tioningmethodusingGlobalNavigationSatelliteSys‐tems(GNSS),suchastheGlobalPositioningSystem (GPS)orotherGNSSconstellationslikeGLONASS, Galileo,orBeiDou.
InaSPPtest,areceiverusessignalsfrommul‐tiplesatellitestodetermineitspositionwithasin‐glereceiverwithouttheuseofdifferentialcorrec‐tions,referencestations,orreal‐timekinematic(RTK) corrections.
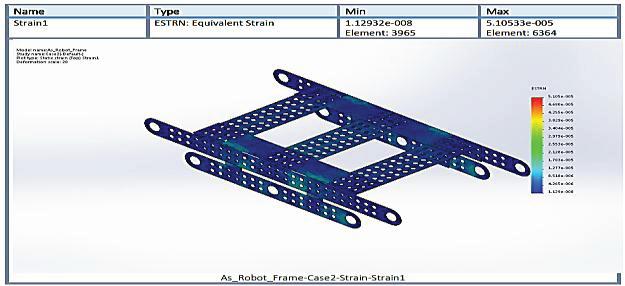

Figure32. Theversionoperatedwithimproved detectioncardsforcalipersandultrasonicsensors
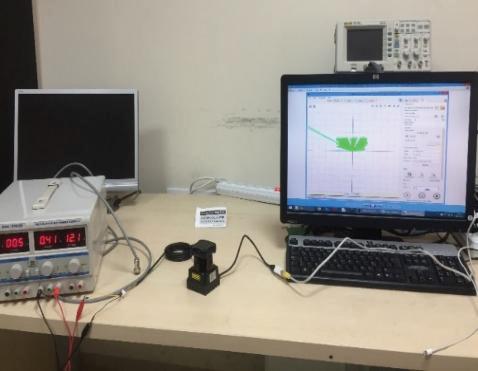
LIDARdetectino
Thepurposeofthistestistomeasuretheaccuracy ofPiksiRTKGPSdevicesindeterminingpositions withinstandardGPSlimits.GPSdataobtainedforeach Piksidevicewascollected,andthisdatawasveri ied usingtheGoogleMapsapplication.Thistestwascon‐ductedseparatelyforeachPiksideviceattwodifferent locations.Thedataandcoordinatesobtainedfromthis testarepresentedintableandgraphicformatsbelow.
TheSPPgraphobtainedusingthePiksiRTKGPS device,usedsimilarlytoastandardGPSdevice,is presentedinFigure35
Theresultsofthelatitudeandlongitudeobtained aftertheSPPtestwereenteredindegreesintothe GoogleMapsapplication,andtheoutputisprovided inFigure36.
RTK‐GPStobeusedforguidingtherobot
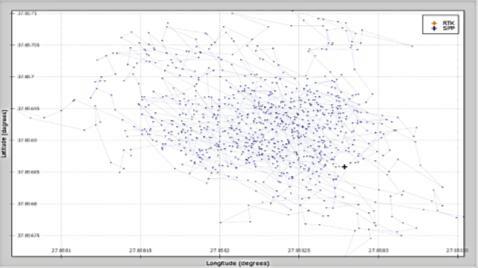
TheStandardGPSSPPgraph
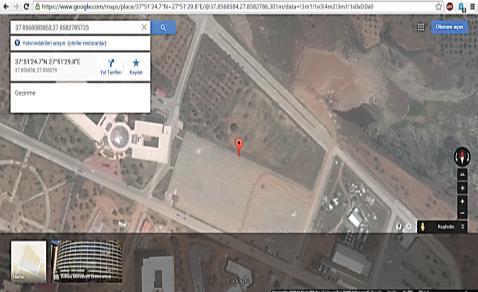
GoogleMapsoutput(37∘51’24.7”N 27∘51’29.8”E37.856858,27.858279)
Inthisstage,theRTKGPStestwasconductedusing theKnownBaselineInitializationmethod.Inthetest, oneRTKGPSdevicewasdesignatedasthePiksiBase Station(Piksi1‐GroundStation),andtheotherGPS devicewasdesignatedasthePiksiRover(Piksi2‐Mobile).
ThestepsforobtainingRTKGPSdatawereasfol‐lows:Initially,bothPiksideviceswerepositionedvery closetoeachotherandactivated.Subsequently,each PiksibegantoacquirestandardGPSdatabytracking atleast4satellites.
Table6. LocationDataComparisonTable
Distancebetweenthetwoacquiredpoints (Decimal)
Distancebetweenthetwoacquiredpoints (DegreesMinutesSeconds)
Distancebetweenthetwoacquiredpoints (Meters)
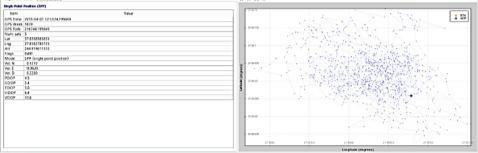
ThesatellitesignalsobtainedbyPiksideviceswith asuf icientsignalstrengthweretransmittedbetween themusingwirelesscommunication(RFtransceiver). TheRTKGPSdataobtainedasaresultofcomparing satellitepositionsandthestepsofdeterminingthe locationareexplainedandshowninthefollowing graphics.
a) Tracking–MonitoringSatellites:Atleast4satel‐liteswithasignalstrengthof3orhigherarebeing tracked.
b) Solution–BothPiksidevicesbegintoobtainposi‐tionsolutionresultsapproximately30seconds aftertheyhavestartedtrackingsatelliteswithsin‐glepointposition.
c) Observation–UsingthePiksiconsole,Piksi1was designatedastheBaseStation,andPiksi2asthe Rover.BothPiksideviceswereequippedwith3DR radioantennas(3DRFtransceiverconnection)and positionedveryclosetoeachother.Piksi1and Piksi2accuratelysentandreceivedsatellitedata toandfromeachother,whichwasthenveri ied throughtwoseparatescreens.
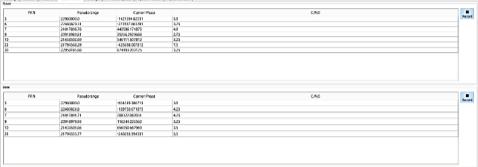
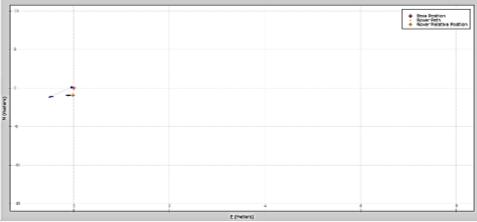
RTKGPSpositioningresults1
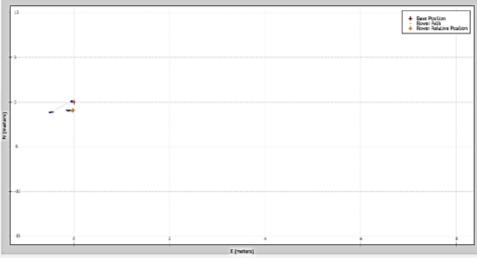
Figure41. RTKGPSpositioningresults2
d) RTKGPSpositioningresults:Piksi1(BaseStation) isindicatedbyaredcross(+),whilePiksi2(Rover) isindicatedbyanorangecross(+).Themovement ofPiksi2relativetoPiksi1canbeobservedinthe east,west,north,andsouthdirections.
e) Intheprocessofdeterminingthelocationswhere the ieldvehiclewillnavigateinthestudy,the positioningdatarequiredcanbeobtainedfromthe Piksi2(Rover)RTKGPSdeviceandsavedasan Excel(.csv) ile.
Figure42. Vineyardrobotdetectionandcontrol software
Figure43. Vineyardrobotdetectionandcontrol software‐Sensordata
Figure44. Lidarmeasurement‐Unobstructed conditions
Asaresult,ithasbecomeevidentthatPiksiRTK GPSisareliableandeffectivetoolforacquiringthe desiredcoordinatedata,underscoringitsimportance inprecisepositioningapplicationsanddatacollection. Vineyardrobotdetectionandcontrolsoftware(Fig‐ure 42)isavailable,alongwithasensordatagraph (Figure43).Lidarmeasurementshavebeenpresented inthefollowing igures(Figures44–46).
Figure45. Lidarmeasurement‐Obstructedconditions
Figure46. Lidarmeasurement‐Twoobstaclespresent
Thisstudysigni iesasigni icantadvancementin the ieldofagriculturalrobotics,markedbythesuc‐cessfuldevelopmentofversatileroboticsystems,con‐trolarchitecture,andtherealizationofagricultural robotsfeaturingbothwheeledandtrackedtraction units.Withinthescopeofthisstudy:
‐ Anautonomousandmanuallyoperableroboticsys‐temhasbeendeveloped.
‐ Anoriginalanduniversalroboticcontrolarchitec‐turehasbeendesignedforagriculturalrobots.
‐ Thedesign,manufacturing,anddevelopmentpro‐cessesoftheagriculturalrobotwithwheeledtrac‐tionunitshavebeensuccessfullycompleted.
‐ Thedesign,manufacturing,anddevelopmentpro‐cessesoftheagriculturalrobotwithtrackedtraction unitshavebeensuccessfullycompleted.
Inconclusion,thisstudyhassuccessfullyaccom‐plishedthedevelopmentofaversatileandadaptable roboticsystemthatcanoperateautonomouslyand manually.Anovelanduniversalroboticcontrolarchi‐tecturewasdesigned,enablingef icientcontrolofthe agriculturalrobots.Bothwheeledandtrackedtraction unitsforagriculturalrobotsweredesigned,manufac‐tured,andimprovedwithpositiveoutcomes.
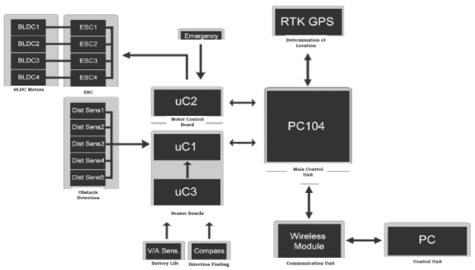


5.Conclusion
Inthisexperimentalstudy,signi icantendeavors havebeenachieved.Theseaccomplishmentsencom‐passthedevelopmentofaninnovativeautonomous andmanuallyoperableroboticsystem,thedesignof auniversallyapplicableroboticcontrolarchitecture tailoredforuseintheagriculturalrobotics ield,as wellasthesuccessfulimplementationofthedesign, manufacturing,anddevelopmentprocessesforagri‐culturalrobotsequippedwithwheeledtractionunits. Thechoiceofacontrolarchitecturedependsonthe speci icrequirementsoftherobot’stasksanditslevel ofautonomy.
Differenttypesofrobots,suchasautonomous vehicles,oragriculturalrobots,mayutilizevarious controlarchitecturestailoredtotheiruniquefunction‐alitiesandoperationalenvironments.
Inparallel,thisexperimentalstudyhasalsoreal‐izedthesamecomprehensivedevelopmentprocesses foragriculturalrobotsemployingtrackedtraction units.Theseachievementscollectivelymarkasub‐stantialadvancementinthe ieldofagricultural robotics,showcasingthesuccessfulintegrationofver‐satilecontrolsystemsandtherealizationofrobust roboticplatformssuitableforagriculturalapplica‐tions.
Recentyearshaveseenasigni icanttransfor‐mationinagriculture,shiftingtowards“Industry‐Agriculture5.0,”markedbytheintegrationofinfor‐mationandcommunicationtechnology.Theuseof IoTsensors,optimizationtechniques,andmachine learningalgorithmshasguidedsmartfarming,aiming toimproveagriculturalproductivitywhilereducing costsandenvironmentalimpact.Thesesystemscol‐lectvastreal‐timedataforoptimizationandin‐depth analysis.Smartfarmingtechniquesenabledbyintelli‐gentagriculturaltechnologyareleadingtheway.
Dronesutilizescanningsystemsalongprede ined routes,enablingextensivecoverageofagricultural ields.Theeffectivenessofthisprocessisheavily reliantoncomputervisiontechnology.Thecaptured imagesserveamultitudeofpurposes,includingthe generationofmulti‐spectraldataforin‐depthcrop analysis,continuousmonitoringofplantgrowth,iden‐ti icationofweeds,assessmentofdiseaseprevalence, andevaluationofoverallcrophealthanddrought impact.Thisapproachhasproventobereasonably accurateinestimatingtheoverallcropyield,showcas‐ingtheversatilityandef icacyofdronetechnologyin modernagriculture.
Futureresearchattemptsshouldprioritizethe optimizationofIoTintegration,advanceddataanalyt‐ics,andtheincorporationofArti icialIntelligence(AI) intodecision‐makingprocesses.Effortstoenhance securityandscalabilityinagriculturaltechnologies arecrucialareasforexploration,alongwithdelving intosupplychainmanagementtofurtherstrengthen agriculturalef iciency.Keypracticesincludecroprota‐tion,diversity,reducedtillage,andintegratedpest management.Implementingtheseapproachesiscru‐cialforecologicalsustainabilityandfoodsecurity amidagrowingglobalpopulation,astheseeco‐friendlymeasuresareindispensableforshapinga resilientandsustainablefuturethatisvitalforthe well‐beingofoursharedplanet.
AUTHORS
IsmailBogrekci∗ –Dept.ofMechanicalEngineering, FacultyofEngineering,AydinAdnanMenderesUni‐versity,Efeler,Aydin,Türkiye/AlproboticsInc.,Co‐founder,Aydin,Türkiye,e‐mail:ibogrekci@adu.edu.tr. PinarDemircioglu –InstituteofMaterialsScience, TUMSchoolofEngineeringandDesign,TechnicalUni‐versityofMunich(TUM),Garching,Munich,85748, Germany/Dept.ofMechanicalEng,FacultyofEng, AydinAdnanMenderesUniversity,Aydin,Türkiye/
AlproboticsInc.,Co‐founder,Aydin,Türkiye,e‐mail: pinar.demircioglu@tadu.edu.tr.
∗Correspondingauthor
References
[1] K.Messaoudi,O.S.Oubbati,A.Rachedi,A.Lakas, T.Bendouma,N.Chaib,“ASurveyOfUAV‐BasedDataCollection:Challenges,Solutionsand FuturePerspectives”, JournalofNetworkand ComputerApplications,vol.216,pp.1‐44,2023. DOI:10.1016/j.jnca.2023.103670.
[2] C.Prakash,L.P.Singh,A.Gupta,S.K.Lohan, “AdvancementsInSmartFarming:ACompre‐hensiveReviewofIoT,WirelessCommunica‐tion,Sensors,AndHardwareForAgricultural Automation”, SensorsandActuatorsA:Physical, vol.362,pp.1‐25,2023.DOI:10.1016/j.sna.20 23.114605.
[3] T.A.Shaikh,T.Rasool,F.R.Lone,“Towards LeveragingtheRoleofMachineLearningAnd Arti icialIntelligenceinPrecisionAgriculture andSmartFarming”, ComputersandElectronics inAgriculture,vol.198,pp.1‐29,2022.DOI:10.1 016/j.compag.2022.107119.
[4] VivekSharma,AshishKumarTripathi,Himan‐shuMittal,“TechnologicalRevolutionsinSmart Farming:CurrentTrends,Challenges&Future Directions,ComputersandElectronicsInAgri‐culture”,vol.201,pp.1‐34,2022.DOI:10.1016/ j.compag.2022.107217.
[5] S.H.Muhie,“NovelApproachesandPracticesTo SustainableAgriculture”, JournalofAgriculture andFoodResearch,vol.10,pp.1‐11,2022.DOI: 10.1016/j.jafr.2022.100446.
[6] S.D.Alwis,Z.Hou,Y.Zhang,M.H.Na,B. Ofoghi,A.Sajjanhar,“ASurveyonSmartFarming Data,ApplicationsandTechniques”, Computers inIndustry,vol.138,pp.1‐14,2022.DOI:10.101 6/j.compind.2022.103624.
[7] P.Demircioglu,I.Bogrekci,M.N.Durakbasa, J.Bauer,“Autonomation,Automation,AI,and Industry‐Agriculture5.0inSustainableAgro‐EcologicalFoodProduction”,In:Durakbasa,N.M., Gençyılmaz,M.G.(eds.) TowardsIndustry5.0 ISPR2022.LectureNotesinMechanicalEngi‐neering.Springer,Cham.DOI:10.1007/978‐3‐031‐24457‐5_11.
[8] S.Ghatrehsamani,G.Jha,W.Dutta,F.Molaei, F.Nazrul,M.Fortin,S.Bansal,U.Debangshi,J. Neupane.“Arti icialIntelligenceToolsandTech‐niquestoCombatHerbicideResistantWeeds—A Review”. Sustainability,vol.15,no.3:1843,pp.1‐18,2023.DOI:10.3390/su15031843.
[9] L.AhmadandF.Nabi. Agriculture5.0:Arti icialIntelligence,IoTandMachineLearning.CRC Press:BocaRaton,FL,USA,ISBN9780367646 080,2021.DOI:10.1201/9781003125433.
[10] K.Ragazou,A.Garefalakis,E.ZafeiriouandI.Pas‐sas.“Agriculture5.0:Anewstrategicmanage‐mentmodeforacutcostandanenergyef icient agriculturesector”, Energies,vol.15,no.9:3113, pp.1‐17,2022.DOI:10.3390/en15093113.
[11] V.Balaska,L.Bampis,I.KansizoglouandA. Gasteratos.“EnhancingSatelliteSemanticMaps withGround‐LevelImagery”, Roboticsand AutonomousSystems,vol.139,103760,pp.1‐15, 2021.DOI:10.1016/j.robot.2021.103760.
[12] V.Balaska,L.Bampis,andA.Gasteratos.“Graph‐BasedSemanticSegmentation”.In Proceedingsof theInternationalConferenceonRoboticsinAlpeAdriaDanubeRegion,Patras,Greece,pp.572‐579,2018.
[13] V.Balaska,L.Bampis,S.KatsavounisandA. Gasteratos.“GeneratingGraph‐InspiredDescrip‐torsbyMergingGround‐LevelandSatelliteData forRobotLocalization”, CyberneticsandSystems, vol.54,no.5,pp.697‐715,2022.DOI:10.1080/ 01969722.2022.2073701.
[14] V.Balaska,L.BampisandA.Gasteratos.“Self‐LocalizationBasedonTerrestrialAndSatellite Semantics”, EngineeringApplicationsofArti icial Intelligence,vol.111,104824,pp.1‐15,2022. DOI:10.1016/j.engappai.2022.104824.
[15] R.K.Paul,T.DasandM.Yeasin.“Ensemble OfTimeSeriesandMachineLearningModel forForecastingVolatilityinAgriculturalPrices”, NationalAcademyScienceLetters,vol.46,pp. 185‐188,2023.
[16] C.KiruthigaandK.Dharmarajan.“Machine LearninginSoilBorneDiseases,SoilDataAnaly‐sis&CropYielding:AReview”.InProceedingsof the2023InternationalConferenceonIntelligent andInnovativeTechnologiesinComputing,Elec‐tricalandElectronics(IITCEE),Bengaluru,India, pp.702‐706,2023.
[17] K.BandaiaandM.Gunasekaran.“AnEf icient ModelforPredictingFuturePriceofAgricultural CommoditiesusingK‐NearestNeighbors AlgorithmComparedwithSupportVector MachineAlgorithm”.In Proceedingsofthe 20223rdInternationalConferenceonSmart ElectronicsandCommunication (ICOSEC), Trichy,India,pp.858‐861,2022.
[18] N.Jain,A.Kumar,S.Garud,V.Pradhanand P.Kulkarni.“CropSelectionMethodBasedon VariousEnvironmentalFactorsUsingMachine Learning”,InternationalResearchJournalof EngineeringandTechnology(IRJET),vol.4,no. 2,pp.1530‐1533,2017.
[19] Z.Du,J.Yang,C.OuandT.Zhang.“Smallholder CropAreaMappedwithaSemanticSegmenta‐tionDeepLearningMethod”, RemoteSensing,vol. 11,no.7,888,pp.1‐21,2019.DOI:10.3390/rs11 070888.
[20] B.D.Grieve,T.Duckett,M.Collison,L.Boyd, J.West,H.Yin,F.ArvinandS.Pearson.“The ChallengesPosedbyGlobalBroadacreCropsIn DeliveringSmartAgri‐RoboticSolutions:AFun‐damentalRethinkIsRequired”, GlobalFoodSecurity,vol.23,pp.116‐124,2019.DOI:10.1016/j. gfs.2019.04.011.
[21] Z.An,C.Wang,B.Raj,S.Eswaran,R.Raf ik,S. DebnathandS.A.Rahin.“ApplicationOfNew TechnologyofIntelligentRobotPlantProtection InEcologicalAgriculture”, JournalofFoodQuality,vol.2022,1257015,pp.1‐7,2022.DOI:10.1 155/2022/1257015.
[22] A.Krishnan,S.SwarnaandH.S.Balasubramanya. “Robotics,IoT,andAIIntheAutomationofAgri‐culturalIndustry:AReview”.In Proceedingsof the2020IEEEBangaloreHumanitarianTechnologyConference (B‐HTC),Vijiyapur,India,pp.1‐6, 2020.
[23] G.A.Mesías‐Ruiz,M.Pérez‐Ortiz,J.Dorado,A. I.deCastroandJ.M.Peña.“BoostingPrecision CropProtectionTowardsAgriculture5.0Via MachineLearningandEmergingTechnologies: AContextualReview”, FrontiersinPlantScience, vol.14,1143326,pp.1‐22,2023.DOI:10.3389/ fpls.2023.1143326.
[24] UsabilityofEnvironmentallysoundandReli‐ableTechniquesinPrecisionAgriculture(User‐PA)‐(VineyardRobotDesignandDevelopment), TUBITAKProject,2016.(FP7‐ERA‐NETInterna‐tional)(No:112O465).
[25] S.Vardin,P.DemirciogluandI.Bogrekci. “DevelopmentandImplementationofan UnmannedGroundVehicleforOff‐Road Applications”, ActaTechnicaNapocensis,Applied Mathematics,Mechanics,andEngineering,vol. 65,no.1,pp.269‐276,2022.
Submitted:8th January2024;accepted:6th May2024
RafałOżóg,MariuszJacewicz,RobertGłębocki,JuliuszHanke
DOI:10.14313/jamris‐2025‐035
Abstract:
Recently,theSmallLow‐AltitudeLongEndurance(LALE) solar‐poweredaircraftgainedattentioninthecommu‐nity.Areliablemathematicalmodeloftheaircraftand solarradiationshouldbeavailabletodesignsuchaplane. Thispaperaddressestheproblemofmeasuringsolar radiationinflightandvalidatingitsmodel.Theconfigura‐tionofthemeasurementsystemwasdescribedindetail. Moreover,theMultiplexFuncubNGwasusedasthe intermediateresearchplatform.Theresultsofflighttests conductedintwodifferentgeographiclocationsinPoland confirmedthattheproposedmodelsenableprecisepre‐dictionoftheamountofharvestedenergy.Themaxi‐mumsolarradiationintensitymeasuredinSeptemberat aroundnoonwas829,3W/m2.Achievingperpetualflight functionalityispossibleintheseconditions,providedthat theaircrafthasverylowpowerconsumptionandahigh wingaspectratio.Theobtaineddatacanbeusedinthe designprocessoftheAZ‐5solar‐poweredplane.
Keywords: Solar‐poweredUAV,Solarenergymodel, Flighttests,Mathematicalmodeling,Solarradiation measurement
Low‐AltitudeLong‐Endurance(LALE)solar‐poweredaircrafthavegainedsigni icantattention inthecommunityoverthelastdecades.These platformsarecharacterizedbytheirversatility, whichencompassesarangeofapplications,including bothcivilianandmilitaryoperations(suchas surveillance,searchandrescue,orcontinuous pollutionmonitoring).However,realizingperpetual solar lightremainsacomplexanddemandingtask. Thedevelopmentofaresearchplatformwithsuch capabilitiesrequiresconsideringasetofvariables. First,itisessentialtonotethatperpetualsolar light mayonlybecompletedunderspeci icconditions. Thecurrentstageoftechnologydevelopment enablesenergygenerationfromsolarradiation withlimitedeffectiveness,primarilylimitedbythe ef iciencyofsolarcells.Widelyavailablesolarcells arecharacterizedbyanef iciencyofupto23%.
Ontheotherhand,thenewesttechnologyavail‐ableforthespaceindustryprovidessolutionswith ef iciencyabove30%,andtop‐edgetechnologieshave

VisualizationoftheAZ‐5UAVresearch platform
provenproductswithef iciencyabove40%.Geograph‐icallocationisalsoacriticalfactorinassessingthepos‐sibilityofperformingaperpetualsolar light.Withthe changeofgeographicallatitude,theamountofsolar radiationandthemaximumSunpositionoverthe horizonvarysigni icantly.Additionally,theamount ofsolarradiationdeliveredtoEarth’ssurfaceisa functionofseasons.Therearespeci icregionsonthe planetthatallowforperpetualsolar light.Dueto operationsatlowaltitudes,additionalfactors,such ascontinuouslyvaryingweatherconditions,should beconsidered–includingthestrengthanddirection ofwind,cloudcoverage,updrafts,andeventhunder‐storms.
Theauthor’smainobjectiveistodevelopaded‐icatedunmannedaerialvehicle(UAV)researchplat‐formnamedAZ‐thatcanperformsolar light(Fig. 1 andFig.2).
Thedevelopmentoftheplatformreachedits inal stage.The irstversionoftheplane,namedAZ‐5A (con igurationwithoutphotovoltaicinstallation),suc‐cessfullycompletedthe lighttests.Thesecondproto‐type,AZ‐5B(versionwithphotovoltaicinstallation),is underdevelopment.
Nevertheless,developingnewconstructionisa multidisciplinaryprocessthatdemandsconsiderable effortandcoordinationofdiversetasks.Therefore,the authorsdecidedtosupportdevelopmentworksbya commercialRCplaneasanintermediatetestplatform. Itsdesignationistoperformavionicsintegrationand verifyitsfunctionalityin lighttests.Asystemformea‐suringandacquiringsunradiationintensityduring lightshasalsobeendeveloped.
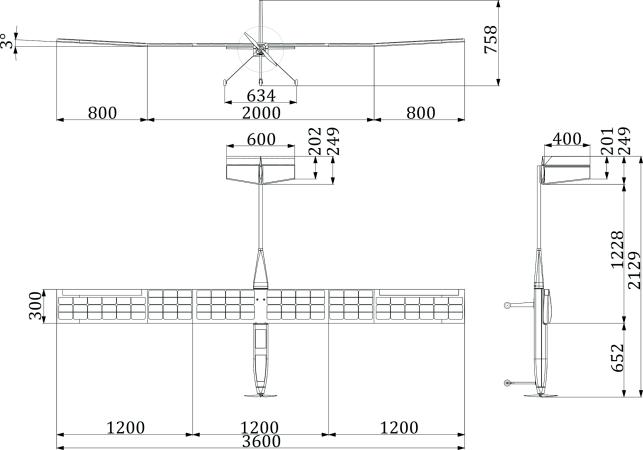
Figure2. BasicdimensionsoftheAZ‐5UAVresearch platform
Asaresult,asetofunique lightparametershas beenobtained.Adifferenttrajectoryhasbeenveri ied during lights,startingfrommanual lightand inish‐ingoncircularpatternswithdifferentradii.
1.1.RelatedWork
Uptothistime,particularlyinrecentyears,numer‐oustrialshavebeenconductedtodevelopsmall solar‐poweredUAVs.However,onlyafewprototypes realizedtheperpetual light.Aresearchteamfrom Switzerlandperformedoneofthemostadvanced researchstudies.Noth[1–3]successfullydeveloped theSky‐Sailoraircraft.Oettershagenmadeessential contributionstothe ieldofsmallsolar‐poweredUAVs, whichledtothedevelopmentofAtlantikSolar[4,5]. In[6,7],hepresentedasetof lightdatalogsfrom perpetual lights.In[8],hevalidatedtheproposed solarpowermodel.Dwivedietal.publishedaseriesof papers[9–12]describingMARAALaircraft.Dantsker etal.[13,14]developedSolarFlyerUAVandpresented testresultsfromlong‐endurance lights.Weider,with histeam[15]developedSunSailorUAV.InPoland, thereareonlyafewexamplesofresearchconcen‐tratedonthistechnology.Amongthem,theAGHSolar Plane[16]isnotable.
Todesignthesolar‐poweredaircraftcorrectly,the amountofsolarradiationthatcanbecollectedmust bepreciselyestimated.TheUAVcanperformcomplex maneuvers,andthesolarcellscanchangetheorien‐tationwithrespecttothedirectionoftheincoming radiation.Uptothistime,severalresearchershave addressedtheneedtodevelopanaccurateenergy harvestingmodelforsolar‐poweredUAVs[17–20].Li etal.[21]presentedasimulationthatcouldpredict theamountofcollectedsolarenergyandwaspar‐tiallyvalidatedby lighttrials.HrovatinandŽemva [22]presentedandvalidatedamodelina lighttest usingasmallUAVnamedBramorppX.Rajendranand Smith[23]alsoproposedamodelthatcanbeusedfor predictingsolarradiationandsizingUAVs.Mortonand Papanikolopoulos[24],aswellasSineglazovandKara‐betsky[25],proposedasimpleapproach,suggesting thatthecapturedsolarpowercouldbemodeledusing asinusoid.However,thepresentedresultswerenot
validatedagainsttheexperimentaldatainsuf icient detail.
Itisessentialtonotethatcreatingreliableenergy modelsfor lyingplatformsrequiresconsideringsev‐eralkeyphenomena.Suchamodelshouldbeinte‐grated,attheveryleast,withthekinematicdescrip‐tionofmotion.Often,thesimplepointmassmodelsof theaircraftareadopted[26,27].Thegeometryofthe systemmustbetakenintoaccount.Zhangetal.[28] includedeachwingsegment’sdihedralinthemodel’s bankangle.Jietal.[29]investigatedthemismatch lossproblemindetail.Wuetal.[30]consideredthe equippingofaZ‐shapedwinginsolarcells.Mostof themodelsaredevelopedundertheassumptionofa clearsky[31].Forexample,Huangetal.[32]reported theenergyharvestingmodelandsimulatedtheresults forseveralcitiesinChina,butagainwithoutexperi‐mentalveri ication.However,neglectingcloudscould signi icantlyoverestimatethetotalcollectedenergy. ForHALEaircraft,there lectedcomponentcouldbe neglected[33],butforsmallUAVs lyingatlowalti‐tudes,thisissueisnotapparent.Gaoetal.[34]sug‐gestedthatforUAVsoperatingatveryhighaltitudes, thein luenceoftherollandpitchanglesontheamount ofcollectedenergycanbeneglected.Thisassumption seemstobeveryrough.Martinezetal.[35]concluded thattherollanglecanbeignoredforpredictingthe amountofsolarenergythatUAVscancollectwhen theSunisathighelevation,butnotinthemorning andevening(whentheSunislowabovethehorizon). LeeandYu[36]consideredtheatmospherictrans‐mittance.Adetailedenergymodelforsolar‐powered UAVswasdescribedbyWuetal.[37,38].Brizon[39] presentedasolarenergymodelforHALEplatforms. Heinvestigatedthein luenceofseveralfactors(lati‐tude,longitude,andtrajectorytype)ontheamount ofcollectedenergy.Meyeretal.[40]presentedasim‐pli iedapproachforpredictingtheamountofsolar energythatUAVscancollect,butthemethodwasnot experimentallyvalidated.Parketal.[41]developed aground‐basedvirtual lightsystemthatmimicsthe realUAV’sdynamicsandcomparedresultswiththose fromsimulation.
ThetechnologyofLALEUAVsisnotfullymature. Manyoftheaforementionedmodelswerenotsuf i‐cientlyvalidated.Tomakethemodelrealisticandprac‐ticallyusable,itsparametersmustbecarefullytuned.
1.2.Contribution
Theprimarycontributionofthisresearchisthe descriptionofsolarradiationmeasurementsevalu‐atedin lightusingasmallUAV.Thedevelopedequip‐mentissmall,lightweight,andlow‐cost,makingit suitableforadoptiononotherplatforms.Theaircraft andsolarradiationmodelsweredevelopedandimple‐mentedinMATLAB/SIMULINK.Thesemodelswere validatedwiththeobtaineddata.Thedevelopedsim‐ulationmightbeusedtodesignphotovoltaicinstalla‐tionsonsolar‐poweredaircraft.
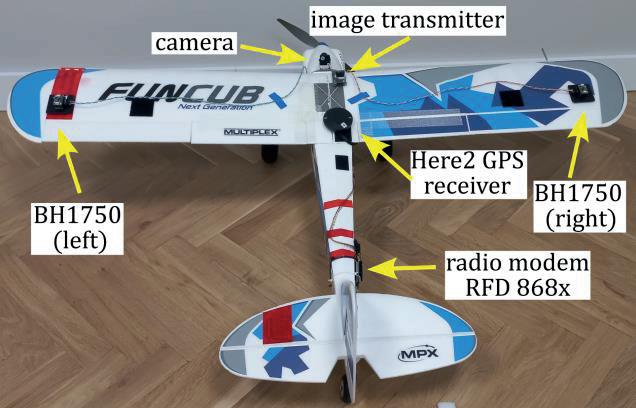
Figure3. Testplatformusedintheexperiments
Thestructureofthepaperisasfollows.Chapter2.1 describesthetestplatform.Thesolarradiationmea‐surementsystemwaspresentedinpart2.2.Section 2.3showsmathematicalmodelsoftheaircraftand solarradiationmodels.Inpart2.4,thegroundmea‐surementsofthepowerconsumptionwerereported. Chapter3presentstheresultsofthe lighttestsand modelvalidation.Thepaperconcludeswithasum‐maryofthemain indingsandtheirimplications. Finally,furtherresearchdirectionsaresuggested.
2.1.IntermediateTestPlatform
TheMultiplexFuncubNGRCairplanewasused asatestplatform(Fig. 3).Theaircraftfeaturesa traditionaldesign,characterizedbyahigh‐mounted wing,singleengine, ixedlandinggear,andatailwheel con iguration.Itischaracterizedbyeaseofuseandis frequentlyusedasatrainingplatform.Theairplane hasbeenmodi iedincomparisontoitsoriginalequip‐ment.
Takeoffmasswas �� =1,96kg,wingareawas ���� =0,399m2,span ���� =1,41m,chord ���� =0,23 m,andoveralllength1,050m.Momentsofiner‐tiawereobtainedexperimentallyusingabi ilarpen‐dulumandareequal: ������ =0,07598kgm2 , ������ = 0,09504kg⋅m2,Izz =0,12134kg⋅m2.Theproductof inertia������ =0,00259kg⋅m2 wascalculatedusingthe CADmodel.Theairplane’sstandardequipmentcon‐sistsofaROXXYBLC35‐42‐930KVelectricmotor, aROXXYBLControl740S‐BECelectronicspeedcon‐troller,anAPC12x6Epropeller,andasetofHitecHS 55+andHS65HBservos.Powerisprovidedbyasingle 3Spackageof3200mAhcapacityproducedbyDualsky. TheairplaneiscontrolledusingaFutabaT14SGradio controllerandaFutabaR7008SBreceivermodule. Originally,themodelweighed1,380kgwithawing loadingof3,46kg/m2.Modi icationshavebeenper‐formedtoadapttheaircraftfortestplatformfunction‐ality.Additionalequipment(equivalentto42%ofits initialweight)causedanincreaseinplatformweight to1,960kg,resultinginawingloadingincreaseup to5,66kg/m2.Weightchangeisnaturallyconnected withthereductionofmaximum lightduration.

Amongadditionalequipment,itispossibletodis‐tinguishthefollowinghardware:theCubeOrange, Here2GPSreceiver,airspeedsensor,ultra‐longrange radiomodemRFD868x,FPVcamerawithvisiontrans‐mitterAVTS832,2xAdafruitBH1750lightsensors, ArduinomicrocontrollerwithDataloggerShieldV1 equippedwithRTCDS1307andSDmemorycardslot, 9VbackupbatteryforpoweringtheArduinoandaddi‐tionalballastneededtobalancethetestplatformprop‐erly.Toreduceunpredictableplatformbehavior,ithas beendecidedtodisablethe lapsoperation.
2.2.SolarRadiationMeasurementSystem
Thesolarradiationmeasurementsystemwas developedincooperationwiththeSchoolofEngineer‐ingandBuiltEnvironment(andAviation)atGrif ith University(inBrisbane,Australia).
Typically,thesolarirradianceismeasuredusing pyranometersorphotovoltaicreferencecells.How‐ever,suchsensorsareexpensiveandlarge,making itproblematictoinstallthemonsmallUAVs,suchas Funcub.Duetothisreason,itwasnecessarytodevelop acustomized,relativelylow‐costsolutionthatcould serveasanalternativetohigh‐gradesensors.
Thesystemconsistsofthefollowingcomponents: twoidenticallightsensorsBH1750(Fig.4)locatedat theendofthewings(atthetopsurface),3Dprinted sensorholdersmountedwithVelcro(Fig.5),Arduino microcontroller,DataLoggershieldV1.0RTCDS1307 withSDcardreaderdedicatedforArduino,32GB microSDcard,9Vrechargeablelithium‐ionbattery andconnectioncables.
ThedatarecorderisbasedontheArduinoboard (Fig.6).
Themeasurementsystemhasbeendesignedto becompletelyindependentofautopilothardware.To synchronizedataregisteredbytheautopilotandthe developedsystem,asignalresponsibleforaileron de lectionhasbeenrecordedtoamicroSDcard.
Measurementsystemfunctionalityhas beenobtainedbyprogrammingtheArduino microcontrollerusingdedicatedlibraries.Thedata acquisitionsystemcommunicateswithlightsensors andsavesrecordedinformationtothemicroSDcard.
Completedsetofsolarradiationmeasurement system
Microcontrollerprotocolcommunicationtest
The irststageofthecommunicationprotocol checkswascompletedusingtwomicrocontrollers (Fig.7).
Integrationofthelightsensorrequiredsetting individualIPaddressesforeachdevice.Infurther steps,acompletesystemwasassembledonthesta‐tionarytestbench(Fig.8a).
Thedevelopedsystemestimatessolarirradiance (aradiometricquantity)usinginformationaboutillu‐minance(aphotometricquantity).
TheBH1750lightsensoroutputstheilluminance (expressedinlux)directly.Asetofpreliminarymea‐surementshasbeencompleted,providingthatthesen‐sor’sreadinghasbeensaturatedataround32000lux. However,inoutdoorconditionsatnoon,theillumi‐nancecanachievemorethan110000lux.Forthisrea‐son,itwasnecessarytomodifythedefaultsetupand increasethesensor’sreadingrangetotherequired value.Improvementshavebeenmadewiththechange ofdeviceresolution,focusingonsoftwarecodemodi i‐cation.Next,theprocedureincludedalightsensorcal‐ibrationfromluxtopowerexpressedasW/m2 deliv‐eredbytheSuntoEarth’ssurface,whichwasaccom‐plishedusingtheSolarSurvey100irradiancemeter (Fig.8b).Finally,datawereloggedonthemicroSData frequencyof10Hz.Additionally,thedatastreamwas synchronizedintimewiththeselectedsinglerefer‐encesignalfromtheautopilot(rightaileronde lection angle).Thisallowedforthesimultaneousanalysisof the lightlogs(fromtheautopilot)andthesolarradia‐tionmeasurementsystem.
Thesystemsuccessfullycompletedthestationary tests.IthasbeenintegratedwiththeRCairplane researchplatforminthenextstep.Sensorswere mountedontheupperwingsurface.Thedistance betweendevicesisequalto1,16m.Additionally,the surfacesofbothsensorswerealignedwithrespect toeachother.Minormountinginaccuraciesmight in luencethequalityoftheresults.Nevertheless,this methodwasdeemedsuf icientfortestingpurposes. Becausetheairplanewinghasasmallinclination,itis expectedtoobtainslightlydifferentreadingsfromthe lightintensitysensor,asitsvectorsarenotparallel.
Duetothefactthatwiresandsensorholders arelocatedonthewing’suppersurfaceandarenot integratedintothestructure,theairplane’saerody‐namiccharacteristicsmaybeslightlyin luenced,caus‐ingincreaseddragforce.
Adetailedmathematicalmodeloftheaircraftwas developedtopredicttheamountofsolarenergythat canbecollectedduringthe light.
2.3.1.EquationsofMotion
Itwasassumedthattheaircraftisarigidbodywith 6degreesoffreedom.Thecoordinatesystemsused inthemodelarepresentedinFig. 9.Thenavigation frame���������������� isusedtodescribethepositionofthe aircraft.Origin ���� ofthebody‐ ixedframe ���������������� isattachedtothecenterofmassoftheplane.Addi‐tionally,���������������� wasusedastheintermediateframe (axesofthe���������������� areparrarelto����������������).More‐over,tode inetheaerodynamicpropertieswindframe ��������
������ andwind‐laboratoryframe������������������������ wereused.
Theequationsoftranslationalmotionareasfol‐lows:


Figure8. (a)Stationaryteststandduringexperimentsin Brisbane(b)SolarSurvey100irradiancemeter
where ��, ��, �� –componentsofthevelocityvector (inbodyaxes), ��, ��, �� –roll,pitch,andyawangular rates,���� ,���� ,���� –axial,side,andnormalforces(the upper‐rightsuperscriptde inesthecoordinatesystem inwhichthequantityisexpressed).Theequationsfor rotationalmotionare:
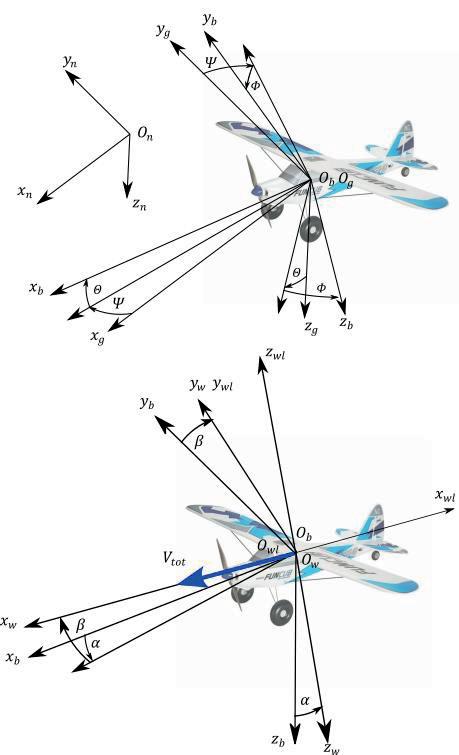
Figure9. Coordinatesystemsusedinthemodel
Itwasassumedthattheaircraftpossessesthever‐ticalplaneofsymmetry,so��
=������ =0.
Quaternionswereusedtodescribethealtitudeof theaircraft:
where
–totalexternalmomentswith respecttotheaircraftcenterofmass, I –inertiamatrix oftheform:
where��–constantsuchas��ℎ������<1(ℎ–thesizeofthe numericalintegrationstep).Itwasassumedthat��= 1.Inthatway��=1− ��2 0 +��2
+��2 2 +��2 3 isadjusted ineachiteration,anditnormalizesquaternionnorm to1.
Velocitycomponentsin
arecomputed fromtherelation:
2.3.2.GravityLoads
Thegravityloadsinbody‐ ixedframe ���������������� framewerecalculatedas:
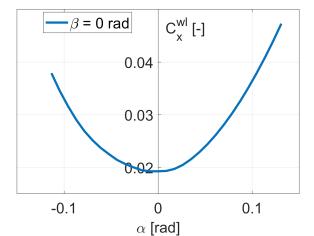
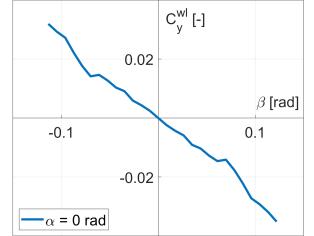
Thetorquegeneratedbythegravityforceiszero becausetheorigin���� ofthe���������������� framecoincides withthecenterofmassoftheplane.
2.3.3.AerodynamicLoads
Theaerodynamicforcesinthebody‐ ixedframe are:
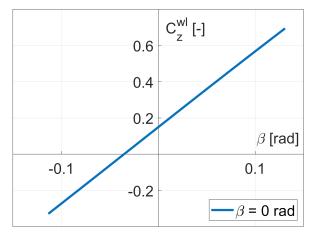
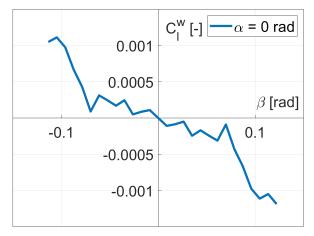
where �� –airdensity, ��
–airspeed, ���� –wing area,and
�� –coef icientsofthedrag,side, andliftforces,respectively(inwind‐laboratoryframe ��
��
������������).The T
istransformationmatrix from
frame:
where��,��–anglesofattackandsideslip,respectively. Aerodynamicmomentswithrespecttothecenterof massare:
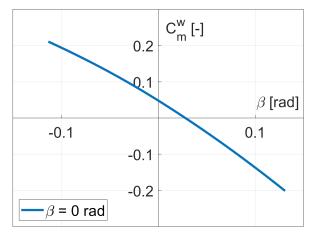
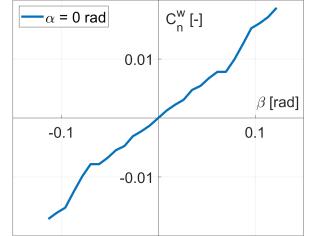
Figure10. Aerodynamiccoefficientsoftheairplane(a) drag(b)sideforce(c)liftforce(d)rollingmoment(e) pitchingmoment(f)yawingmoment
where
–rolling,pitching,andyawing momentcoef icients,respectively(inwindframe). Theaerodynamiccoef icientsofforceswerecalcu‐latedas[42,43]:
Thetotalspeedis:
where����,����,���� –windvelocityvectorcomponents inthebody‐ ixedframe
��.Adetaileddescrip‐tionofthewindmodelcanbefoundin[44,45].The angleofattackwascalculatedas:
andtheangleofthesideslipis:
where���� –elevatorde lection(positivetrailingedge down), ���� –aileronde lection(positivetrailingedge down)calculatedasmeanofde lectionsforleftand rightailerons:
Additionally, ���� –rudderde lection(positivetrailing edgeleft).
Themoment’scoef icientsare:
Theaerodynamiccharacteristicsoftheplanewere calculatedusingXFLR5software.Thecoef icients(for unde lectedcontrolsurfaces)arepresentedinFig.10. Forcecoef icientsarerelatedin ������������������������ frame,andmoments(withrespecttothecenterof mass)in������������������������ frame.
ThestabilityandcontrolderivativesoftheFuncub planearepresentedinTable1.
Table1. StabilityandcontrolderivativesoftheFuncubplane
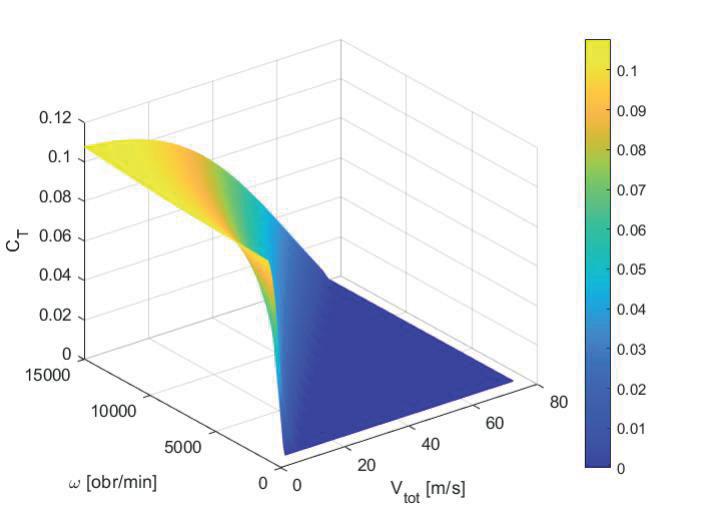
2.3.4.PropulsionModel
Dataofthepropellerwereobtainedfromthe datasetprovidedbythemanufacturer(APCPro‐pellers).Thepropulsiveforceswerecalculatedas:
,0,0 (20)
Thepropellerthrustwascalculatedusingthefor‐mula:
(21) where��–airdensity,��–angularrateofthepropeller, ���� –propellerdiameter,and ���� –thrustcoef icient (Fig.11).
Themomentswithrespecttotheaircraftcenterof masswerealsotakenintoaccount:
(22)
where ⃗���� �� = 0,370,0 T –positionvectorofthe propellerhubinbody‐ ixedframe, ���� –momentof inertiaoftherotatingmasses, ⃗���� = ��,0,0 –the
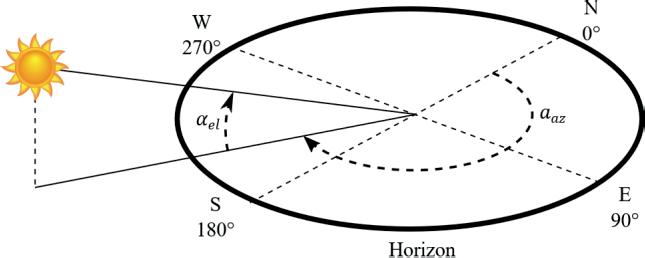
Figure12. Solarazimuthandelevationangles angularrateofthepropellerand ⃗ Ω= ��,��,�� –vectorofangularratesoftheplane.
Thepresentedmathematicalmodeloftheaircraft wasimplementedinMATLAB/SIMULINKR2023a withUpdate5.Theequationsofmotionwereinte‐gratednumericallyusinga4th‐order ixed‐stepsolver (Runge‐Kutta)withatimestepsizeof0,001s.
2.3.5.SolarRadiationModel
Thesolarradiationmodelwasdevelopedtopre‐dicttheamountofreceivedsolarradiation.Theposi‐tionoftheSunwasparametrizedusingazimuthand elevationangles(Fig.12)[23].
Solardeclinationwascalculatedasfollows [46,47]: ��=23,45sin 360 365(284+n) (23)
wheren=1…365isdayoftheyear(1���� January=1). Next,theSunhourangle������ wasestimatedusingthe relation:
(24)
where:�������� –LocalStandardTime,������ –equationof time,������ –StandardLongitudeand������������ –LocalLon‐gitude.Theequationoftimeisgivenintheform[47]:
���� =229,2(0,000075+0,001868cos��
−0,032077sin��−0,014615cos2��
−0,04089sin2��) (25)
where��=(��−1) 360 365.Solarelevationangle������ is[46, 48]:
������ =asin(sin��sin��+cos��cos��cosℎ) (26)
Azimuthangle ������ wasobtainedfromtherelation [48]:
������ =acos (sin��cos��−cos��sin��cosℎ) cos������ (27)
Theinversecosinetrigonometricfunctionreturnsval‐uesintherangefrom0∘ to180∘.Ifthehourangleis negative,then������ =360∘ −������.Inthatway������ fallsin rangefrom0∘ to360∘
TheASHRAEclearskymodelwasusedtopredict theamountofsolarradiationreceivedbythesensors. Thechangesinextraterrestrialradiationduringthe yeararemodeledas[46]:
��=��0 1+0,034cos 360�� 365,25 (28)
wheretheSolarconstantis ��0=1353W/m2.Optical airmass��wascalculatedinthefollowingway[46]: ��= 1 sin������ +0,50572(6,07995+������) 1,6364 (29) where������ –solarelevationangle(thisvalueshouldbe expressedindegrees).
Thetotalirradianceisthesumofthebeam,dif‐fused,andre lectedcomponents[49,50].Thebeam’s normalirradianceperunitarea,(whichisperpendic‐ulartothesunrays)[46,51]wasobtainedas:
(30)
Thediffusehorizontalirradianceperunitareaona horizontalsurface[46,51]:
(31)
Thecoef icients���� and���� dependonthegeographical locationandvaryduringtheyear.Sometabulatedval‐uescanbefound,forexample,in[46].Thecoef icients �� and �� wereobtainedfromthefollowingrelations [37,46,51]:
��=1,219−0,043���� 0,151���� 0,204�������� (32)
��=0,202+0,852���� 0,007���� 0,357�������� (33)
In���������������� frametheunitvectoralongthe���� axis(in thenegativedirection)havethefollowingcomponents ̂��= 0,0,−1 T [28].Next,thevalueofthecosineof theanglebetweenthedirectionoftheincomingsolar raysandthelinethatisperpendiculartothesurface ofthewingswascalculatedas[29,37,39,51,52]:
cos��=̂��⋅ 10 0 0 cosΦ−sinΦ 0 sinΦ cosΦ
cosΘ0 sinΘ 010 sinΘ0 cosΘ
cosΨ−sinΨ0 sinΨ cosΨ0 0 01
cos������ cos������ sin������ cos������ sin������ (34)
Afterseveralmathematicaloperations,theresultis [51,52]:
cos��=cos����sin����(cosΨsinΦ cosΦsinΨsinΘ)
cos����cos����(sinΦsinΨ +cosΦcosΨsinΘ) +cosΦ
Whenthecos�� isknown,itcanbeusedtocalculate theamountofreceivedpowerfromtheunitarea[32, 51,53].
Thesensorsareinstalledonlyontheuppersurface ofthewing.Ifthesurfaceofthesensorisoriented inthedirectionoppositetotheSun,thenthedirect componentis[26,37,54]:
Thediffuseirradianceis:
Thesolarradiationonthehorizontalsurfaceis:
Forlowattitudealso,there lectedcomponentwas takenintoaccount[55]:
where ���� –groundre lectionfactor(assumed0,05). Thetotalreceivedirradianceis:
Thesolarradiationmodelwasimplementedin MATLAB/SIMULINKandintegratedwiththenumeri‐cal lightsimulationoftheaircraft(Fig.13).
Moreover,thepresentedmodeloftheSun’sposi‐tionwasvalidatedbycomparingtheresultsobtained fromSIMULINKwiththosefromthewebsite https: //www.suncalc.org.Next,themodelwasusedto predicttheamountofsolarradiationandpreparethe lightscenariosfortherealexperiments.
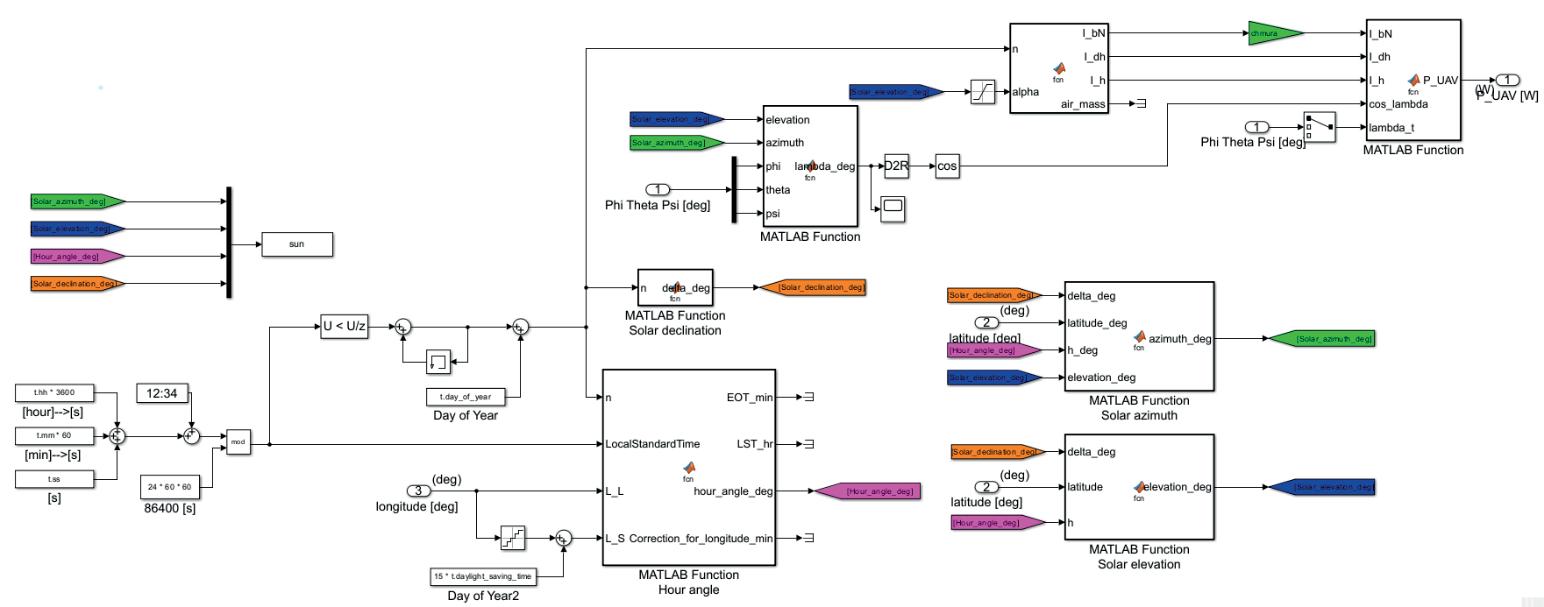
Duringresearch,itwasrequiredtoestimatethe powerdemandandenergyconsumptionoftheindi‐vidualsubsystems(electricengine,autopilot,teleme‐try,andsensors).Thetotalenergyconsumptionof thesystemisrecordedinthe lightlogs.However,the powermoduleusedtomonitorthebatterystatemust beproperlycalibrated.
Aseriesofgroundtestswasconductedtoobtain theamountofpowerrequiredbythecomponentsof theelectricsystems.Voltageandcurrentweremea‐suredmanuallyusingavoltmeter(connectedinpar‐allel)andanammeter(placedinseries)betweenthe mainbatteryandautopilot.
Itshouldbenotedthatasecondarypowersource powersthesolarradiationmeasurementsystem.The obtainedresultsarepresentedinTable2
Theenergyconsumptionbytheelectroniccompo‐nentsispracticallyconstant.Thepowerrequiredby electronicsismuchsmaller(below3%ofthetotal maximumvalue)thanthepowernecessarytodrive theelectricmotor.Increasingtheangularspeedof themotorresultsinasigni icantdropinthebattery voltage.
3.1.FlightTests
Aseriesof lighttestswasconductedatdifferent timesofthedaytocollectthedata.Theexperiments wereevaluatedattwolocations:Zalesie(52,266874∘ , 20,751108∘)andPrzasnysz(53,009749∘,20,929911∘) air ields(Fig.14).
Theprimaryobjectivesoftheexperimentswereto collectdataon lightparametersandsolarradiation, whichareessentialforvalidatingthedevelopedmath‐ematicalmodels.
Theweatherconditionsweregood,withlowcloud coverage(inbothlocations).InZalesie,thewindgusts’ maximumspeedwasnomorethan3m/s,butinPrza‐snysz,itwassigni icantlyhigher(upto6m/s).The aircraftwascontrolledremotelybyanexperienced

Aircraftreadytostartattherunwayin Przasnyszairfield.
dronepilot.Theexperimentswererealizedintwo lightmodes:manualandsemi‐automatic.Addition‐ally,thesecondoperatorobservedthe lightparam‐eters(e.g.,speed,altitude,batterystateofcharge) usingtheGroundControlStation.Inthatway,the aircraftensuredthatitwouldcorrectlyandsafely completetheprede inedmissionscenario.The light logsobtainedfromtheautopilotwereanalyzedusing MissionPlannersoftware(https://ardupilot.org/plan ner/)andUAVLogViewer(https://plot.ardupilot.org /#/).
Next,thedevelopedmodelswerevalidatedusing theobtaineddata.Theinputdatatothemodel(geo‐graphiccoordinates,date,andtimeofthetrials)were setaccordingtothemeasureddata.The lighttrials weredocumentedwithphotographs,soitwaspossi‐bletoobtainthelevelofcloudiness.The lightlogs werealignedintimewithdatafromthesolarradi‐ationmeasurementsystem.Inordertocalculatethe cross‐correlationoftwodiscrete‐timesignals(aileron de lection),theMATLABfunction“xcorr”wasused. Inthesubsequentparagraphs,selectedresults fromtheexperimentsarepresented.
3.2.Case1
ThistestwasperformedinZalesieon2023‐09‐08 (year‐month‐day).Thedataloggingprocessstarted at16:38:56(HH:MM:SS,hours,minutes,andseconds) CentralEuropeanSummerTime(CEST).
Table2. Powerconsumptionofsystem’scomponents





Figure15. Aircraftflightparameters(a)position(b)roll, pitch,yawangles(c)batteryvoltage,current,and consumedenergy(case1)
Figure16. Solarilluminance,radiationintensity,and energy(case1)
Theaircrafttookoffat16:45:54.Inthatcase,the UAVwaspilotedonlyinmanualmode.Theaircraft lightpathispresentedinFig. 15a(datahasbeen croppedtothetimerangeofinterest).Ascanbe observed,thepilothasfrequentlyrepeatedtrajecto‐riessimilartoair ieldtraf icpatterns(inthecounter‐clockwisedirectionwhenlookingfromthetop).Small yellowarrowsinFig.15ameanthedirectionofmotion. Thewhitearrowindicatesthesolarazimuth(thedirec‐tionofthesun’srays).Atthestart,thesolarazimuth was249,57∘ andtheelevationwas22,04∘.Azimuth ismeasuredfromNorthinaclockwisedirection,and elevationfromthehorizontalplane(pleaseseethe conventioninFig.12).Theroll,pitch,andyawangles arepresentedinFig.15b.InFig.15c,thebatteryvolt‐age,current,andthetotalamountofenergyconsumed bytheaircraftareshown.
Themeasuredrollanglewasbetween‐48,16∘ and +20,74∘ (theplotisasymmetricalbecausetheaircraft performedleftturns).Fromtheyawangleplot,itcan beconcludedthatapproximately8fullloopswere evaluatedin light.
Thevoltagedecreasesslowlywithtime.Thecur‐renthasthehighestamplitudeatthebeginningof themissionbecausethentheaircraftperformsthe startandtheascending light.Torealizethemission 7.84Whofenergywasspent.
InFig. 16,themeasuredsolarilluminanceispre‐sented.Themeasuredsolarilluminancewascon‐vertedintosolarradiationintensityusingcalibration coef icientsthatwereobtainedexperimentally.Then, theobtainedresultswereintegratedintimetoesti‐matetheenergythatcouldbecollected(per1square meter).
Roll,pitch,yawangles(case1,enlargedview)


Figure18. Solarilluminance,radiationintensity,and energy(case1,enlargedview)
Themaximumpossibleamountofsolarradiation intensityisapproximately554,6W/m2.Theampli‐tudevariessigni icantlyduetochangesinaltitude. Theradiationreceivedbysensorsstronglycorrelates withtherollandpitchangles.Theaircraftperformed asetofmaneuvers.Theintensitydependsstronglyon theanglebetweentheincomingrayandthesensor’s surface.
Moreover,itcanbeobservedthatthedatafrom bothsensorsdifferabit.Themainreasonforthatphe‐nomenonisthewing’sdihedralangleandthesensors’ minormountingimperfections.
Theamountofenergyincreasesmonotonically withtime.Thedatafromsensor1indicatethatcol‐lecting14.78Whofenergy(from1squaremeter)is possibleintheseconditions.Usingdatafromsensor 2,itwasfoundthatthisresultisslightlyhigher,15.41 Wh.
Theexperimentalradiationintensityvaluesare incloseagreementwiththemodelpredictions.The modeloverestimatedtheamountofcollectedenergy (17,35Wh).
Thetypicaloverallef iciencyofphotovoltaicsys‐temsthatareusedonsolar‐poweredUAVsisaround 20%[7].Thismeansthattheoretically,the2.956Wh ofenergycanbeobtained(usingsensor1data).



Figure19. Approximateaircraftlocationatenergypeak (case1,enlargedview)
TheMultiplexFuncubNGisunabletoachieve perpetual lightusingonlysolarenergybecausethe energyrequiredforpropulsionissigni icantlyhigher thantheamountofenergythatcanbeharvestedfrom solarradiation.
Itisworthwhiletotakeacloserlookattheresults tounderstandtherelationshipbetweentheEuler anglesandtheamountofsolarradiationreceived.The selecteddataportion(from20sto50s)isshownin Fig.17andFig.18tomakethedetailsmorevisible.
Oneofthepeaksofthesolarradiationoccurred approximatelyattime31.6s(pleaseseethedatatipin Fig.17).Then,theaircraftwasbankedontheleftwing (rollangleisnegativeandequaltoaround–32∘)and movedattheyawangleof350∘ (fromSouthtoNorth). Thatmeansthesolarradiationsensorswerepointed inthedirectionoftheoncomingradiation.Thesketch oftheaircraftlocationontheanalyzedportionofthe lightpathispresentedinFig.19
Ontheotherhand,in50s,theamountofreceived solarradiationisrelativelysmallbecausetheaircraft movedfromNorthtoSouth,andtherollangleis≈4.5∘ (thesensorswerenotpointeddirectlytotheSun).
3.3.Case2
Scenario2wasalsocompletedinZalesieon2023‐09‐12.Thedatalogginginautopilotwasinitiatedat 13:07:02CEST.Theplanetookoffat13:14:42.Inthis experiment,theaircraftwaspilotedinbothmanual andsemi‐automaticmodes.Theresulting lightpath ispresentedinFig.20a.Theplanemovedinacounter‐clockwisedirection.Thesolarposition(azimuthand elevation)was193,19∘ and41,23∘,respectively.
Therollangle(Fig. 20b)wasintherangefrom–56,25∘ to+29,17∘.Also,thepitchanglewasbetween –41.31∘ to+31.09∘.Theyawangleindicatesthatthe aircraftrealizedmorethan11loops.
Thecurrent(Fig. 20c)dropsrapidlyafter320s becausetheplanelandedandthenwastaxiingonthe runway.Theaircraftspent10,83Whofenergyduring themission.
InFig.21,thesolarradiationmeasuredinthesec‐ond lighttrialisshown.










Figure21. Solarilluminance,radiationintensity,and energy(case2)
Figure20. Aircraftflightparameters(a)position(b)roll, pitch,yawangles(c)batteryvoltage,current,and consumedenergy(case2)
Figure22. Roll,pitch,yawangles(case2,enlargedview)
Thesolarradiationintensityexhibitsasinusoidal patterncorrespondingtochangesintheorientation angles.Themaximumvalueofsolarradiationinten‐sityis829,3W/m2 (signi icantlyhigherthanincase 1).Fromsensor1,itwasestimatedthatcollecting 45,21Whofsolarenergyispossible(per1square meter).Usingsensor2,thisvaluewasestimatedtobe 45,26Wh.
Figure23. Solarilluminance,radiationintensity,and energy(case2,enlargedview)
Themodelpredictedthattheamountofenergy thatcanbeharvestedis45,65Wh,whichiscloseto therealvalues.
Again,assumingtheaircraftcanbeequippedwith solarpanels(1squaremeterinarea)andtheenergy canbeharvestedwithanef iciencyof20%,the obtainedvalueis9,042Wh.








Figure24. Approximateaircraftlocationatenergypeak (case2,enlargedview)
Inthiscase,theamountofharvestedenergyis stillinsuf icienttocovertheinstantaneousenergy demand.Moreover,fromapracticalpointofview,the hypotheticalsystemcannotaccumulateenergyforthe onboardbatteries(becausetheenergyconsumption of10,83Whwashigherthanproduction).Asamatter offact,itwouldnotbepossibletoachieveperpetual lightfunctionalityoveralongerperiod.
InFig. 22 andFig. 23,theselecteddataportion (from220sto260s)isshowninanenlargedview.
Oneoftheenergypeaksoccurredattime245,6s. Theaircraftperformedaleftturnandwasbankedon theleftwing(rollangleis 27,25∘,pleaseseeFig.22). Thismeansthesolarradiationsensorswerepointed towardtheincomingsunlight.Thesituationscheme withtheselectedportionofthe lightpathispresented inFig.24
3.4.Case3
Incasenumber3,theexperimenttookplacein Przasnyszon2023‐09‐21.Thedataloggingsystem wasinitiatedat15:41:26,andtheplanetaxiedfora while.Next,theaircrafttookoffat15:45:17.Theplane startedandlandedinmanualmode,butmostofthe missionwasrealizedinloitermode.Theradiusofthe circulartrajectory(Fig. 25a)waslargerwhencom‐paredtocase2.Solarazimuthandelevationangles were234,53∘ and24,41∘
Therollangle(Fig.25b)variedsigni icantlyfrom –45,75∘ upto73,12∘.Toful illthemission,12,28Wh oftheenergywasspentbytheonboardelectronic system(Fig.25c).
ThelightradiationintensityispresentedinFig.26
Themaximummeasuredvalueoftheradiation intensityis701,6W/m2
Usingdatafromsensor1,itwascalculatedthat 20,93Whofenergycanbecollected(from1square meterofsurface).Datafromsensor2indicatesa bitlowervalueof19,01Wh.Themodelpredictions (20,72Wh)arebetweenthevaluesfrombothsensors. Theenlargedviewoftheselecteddataportionis showninFig.27andFig.28.





Figure25. Aircraftflightparameters(a)position(b)roll, pitch,yawangles(c)batteryvoltage,current,and consumedenergy(case3)
Fortheselectedpartofthetrajectory,theaircraft performedtworapidturns(pleaseseeFig.29).Inthe irstturn,itwasbankedtotheleft,andasaresult,the wingshadedthesolarradiationsensors.Between40s and50s,theirradiancewassmallerthan60W/m2 (thecurveispractically latforthistimerange).Inthe secondturn,theaircraftbankedontherightwing.The maximumrollangleoccurredat55.7sandisequalto 36,06∘
Figure26. Solarilluminance,radiationintensity,and energy(case3)


Figure27. Roll,pitch,yawangles(case3,enlargedview)
Figure28. Solarilluminance,radiationintensity,and energy(case3,enlargedview)
Asaresult,thesensorswerepointeddirectlyat theSun.InFig.28,at55,7s,thelocalmaximumofthe signalwasobserved.
Thispaperpresentsthemethodologyforin‐lightsolarradiationmeasurementsusingasmall unmannedaerialvehicle.



Figure29. Approximateaircraftlocationatenergypeak (case3,enlargedview)
Amongthemaingoalsoftheconductedresearch, thefollowingstagescanbedistinguished:avionicssys‐temintegrationandtesting, lightexperiments,data acquisitionfromthe lightandsolarsystems,analy‐sisofrecordeddata,andperformanceofcomputer simulationsbasedontheobtainedresults.Completed worksaretheintermediatestageofdevelopingthe primaryresearchplatform–theAZ‐5solarUAV–andcanbedirectlyimplementedbasedonthegained experience.
ToadapttheRCairplaneforresearchplatform requirements,asetofmodi icationshasbeenmade. Amongthem,itispossibletodistinguishthesolarradi‐ationmeasurementsystemandadditionalavionics integration.Theundeniabledrawbackofthemodi ica‐tionsisanincreaseinplatformweight,andtherefore, areductioninitstotal lighttime.
Experiencefromthedevelopmentofthesolarradi‐ationmeasurementsystem,e.g.,hardwareprogram‐mingandconductedfunctionalitytests,provedthat itssubcomponentsshouldbeselectedwithparticu‐larcare.Sensorquality,includingsamplingfrequency andaccuracy,isakeyfactorin luencingthe inal results.Anothersigni icantaspectislightsensorcal‐ibration,whichallowsfordirectconversionfromlux toW/m².Itisessentialtonotethattheproposed measurementdevicehasloweraccuracythanhigh‐performancegradeirradiancemeters.However,it allowsforthecollectionofquantitativedataatarea‐sonablecost.
Thenextresearchgoalwastovalidateasolar radiationmodel.Fromrecorded lightdataobtained attwolocationsinPolandandatdifferenttimesof day,arepresentativedatasetconsistingof3 lightshas beenselected.All lightshavebeenperformedingood weatherconditions,withsmalltomoderatecloudcov‐erageandwindgustsoflessthan3m/sinZalesieand upto6m/sinPrzasnysz.Flightconditionshavebeen incorporatedintothesimulationmodel,includingair‐planeorientationangles,exacttime(date,hour,and minute), lightduration,andgeographicallocation.As aresult,anirradiancefunctionwasobtained.
Acomparisonofsimulationdatawithrecorded datademonstratedthehighqualityofthemathemat‐icalmodelanditsaccuracyatalevelofaround90%or above.
Moreover,someresultsmaybeinitiallyconfusing andnotmeettheaboverequirement.Namely,ascan beobservedfromtheradiationintensity igures,there areregionswherethesimulationmodeldiffersfrom therecordedvaluesbymorethan10%.Thisphe‐nomenonisobservedwhenanairplane liesbelow25 mabovegroundlevelorremainsonthegroundin Zalesie.Itiscausedbythefactthattheresearchplat‐formwasplacedintheshadowscastbylocalobjects (talltrees),anddirectsunradiationcomponentsdid notcontributetothesolarradiationmeasurement.In fact,thedevelopedsolarradiationsimulationmodelis assumedtobeavaluablesimulationdevicecapableof re lectingactual lightconditions.
Lastly,anassessmentofthemodi iedMultiplex FuncubNGresearchplatform’scapabilitytoperform perpetualsolar lightsisalsoconsidered.Analysis ofbatteryvoltage,current,andenergyconsumption, aswellassolarilluminanceandestimatedirradi‐ance,yieldsseveralconclusions.Theaveragepower requiredduringtheperformed lighttestsvariesfrom approximately77Wto142W,dependingonthe lightmodeselectionandwindconditions.Flights performedinautomaticmodewithsmallwindgusts providethelowestenergyconsumption.Flyingwith strongwindscausesthehighestenergyusage.
Duringcompletedtests,theaveragepossible powerproductionfromthehypotheticalphotovoltaic systemvariesfrom17.6Wto35W,assumingan overallef iciencyof20%andcompletecoverageof thewing’suppersurface(0,399m2 forFuncubNG). Abatterycapacityof35.52Whwouldnotallowfor accumulatingenoughenergytocontinue lightsdur‐inglowerSunpositionsabovethehorizon(morning andeveninghours).
Theaboveanalysisclearlystatesthattheinter‐mediateresearchplatformFuncubNGcannotachieve perpetualsolar lightsbecauseitrequiresasigni icant amountofenergy.Thedataobtainedwillbeused todesignanddevelopthephotovoltaicinstallation oftheAZ‐5solar‐poweredaircraft.Thisaircraft(in contrasttoFuncubNG)wasspeciallydesignedand hadmuchlowerenergyconsumptionandahighlift‐to‐dragratio.
AUTHORS
RafałOżóg –WarsawUniversityofTechnology,Fac‐ultyofPowerandAeronauticalEngineering,Institute ofAeronauticsandAppliedMechanics,Divisionof Mechanics,Nowowiejska24,00‐665Warsaw,Poland, e‐mail:rafal.ozog.dokt@pw.edu.pl.
MariuszJacewicz∗ –WarsawUniversityofTechnol‐ogy,FacultyofPowerandAeronauticalEngineering, InstituteofAeronauticsandAppliedMechanics,Divi‐sionofMechanics,Nowowiejska24,00‐665Warsaw, Poland,e‐mail:mariusz.jacewicz@pw.edu.pl.
RobertGłębocki –WarsawUniversityofTechnology, FacultyofPowerandAeronauticalEngineering,Insti‐tuteofAeronauticsandAppliedMechanics,Divisionof Mechanics,Nowowiejska24,00‐665Warsaw,Poland, e‐mail:robert.glebocki@pw.edu.pl.
JuliuszHanke –AirbusHelicoptersDesignOf ice, MarshalJozefPilsudskiStreet85,92‐332Lodz,Poland, e‐mail:juliusz.hanke@airbus.com.
∗Correspondingauthor
ACKNOWLEDGEMENTS
SpecialthankstoProfessorStevenO’KeefefromGrif‐ithUniversity,SchoolofEngineeringandBuiltEnvi‐ronment(andAviation),forsupervisingandsupport‐ingthedevelopmentofthesolarradiationmeasure‐mentsystem.
Thedatasupportingthe indingsofthisstudy areavailableuponreasonablerequestfromthecorre‐spondingauthor.
[1] A.Noth,W.Engel,andR.Siegwart,“Designofan ultra‐lightweightautonomoussolarairplanefor continuous light”, SpringerTractsinAdvanced Robotics,vol.25,no.January,2006,441–452.ht tps://doi.org/10.1007/978‐3‐540‐33453‐8_37.
[2] A.Noth,“Designofsolarpoweredairplanesfor continuous light”,1980,0–17.
[3] A.Noth,S.Bouabdallah,S.Michaud,R.Sieg‐wart,andW.Engel,“Sky‐sailordesignofan autonomoussolarpoweredMartianairplane”, Earth,2004,1–8.https://doi.org/10.3929/ethz‐a‐010085369.
[4] P.Oettershagenetal.,“Robotictechnologiesfor solar‐poweredUAVs:Fullyautonomousupdraft‐awareaerialsensingformultidaysearch‐and‐rescuemissions”, JournalofFieldRobotics,vol.35, no.4,2018,612–640.https://doi.org/10.1002/ rob.21765.
[5] P.Oettershagenetal.,“Asolar‐poweredhand‐launchableUAVforlow‐altitudemulti‐daycon‐tinuous light”, ProceedingsoftheIEEEInternationalConferenceonRoboticsandAutomation, vol.2015‐June,2015,3986–3993.https://doi. org/10.1109/ICRA.2015.7139756.
[6] P.Oettershagenetal.,“Perpetual lightwitha smallsolar‐poweredUAV:Flightresults,per‐formanceanalysisandmodelvalidation”, IEEE AerospaceConferenceProceedings,vol.2016‐June,2016.https://doi.org/10.1109/AERO.2 016.7500855.
[7] P.Oettershagenetal.,“Designofsmallhand‐launchedsolar‐poweredUAVs:Fromconcept studytoamulti‐dayworldendurancerecord light”, JournalofFieldRobotics,vol.34,no.7,
2017,1352–1377.https://doi.org/10.1002/ro b.21717.
[8] P.Oettershagen,“High‐ idelitysolarpower incomemodelingforsolar‐electricUAVs: Developmentand lighttestbasedveri ication”, 2017.http://arxiv.org/abs/1703.07385.
[9] V.S.Dwivedi,J.Patrikar,A.Addamane,andA.K. Ghosh,“MARAAL:Alowaltitudelongendurance solarpoweredUAVforsurveillanceandmap‐pingapplications”, Proceedingsofthe201823rd InternationalConferenceonMethodsandModels inAutomationandRobotics(MMAR),2018,449–454.https://doi.org/10.1109/MMAR.2018.84 85805.
[10] V.S.Dwivedi,P.Kumar,A.K.Ghosh,andG.M. Kamath,“Selectionofsizeofbatteryforsolar poweredaircraft”, IFAC-PapersOnLine,vol.51,no. 29,2018,424–430.https://doi.org/10.1016/j.if acol.2018.09.450.
[11] V.S.Dwivedi,Salahudden,A.K.Ghosh,andG.M. Kamath,“Designstudiestoachieveenergyopti‐malattitudeforasolar‐poweredaircraft”, IEEE AerospaceConferenceProceedings,vol.2019‐March,2019,1–8.https://doi.org/10.1109/AE RO.2019.8741733.
[12] V.S.Dwivedi,Salahudden,D.K.Giri,A.K.Ghosh, andG.M.Kamath,“Optimalenergyutilization forasolar‐poweredaircraftusingsliding‐mode‐basedattitudecontrol”, IEEETransactionson AerospaceandElectronicSystems,vol.57,no.1, 2021,105–118.https://doi.org/10.1109/TAES .2020.3015310.
[13] O.D.Dantsker,M.Theile,M.Caccamo,S.Yu, M.Vahora,andR.Mancuso,“Continueddevelop‐mentand lighttestingofalong‐endurancesolar‐poweredunmannedaircraft:UIUC‐TUMsolar lyer”, AIAAScitech2020Forum,vol.1PartF, 2020,1–14.https://doi.org/10.2514/6.2020‐0781.
[14] O.D.Dantsker,M.Theile,andM.Caccamo,“Long‐endurance lighttestingresultsfortheUIUC‐TUMsolar lyer”, AIAAAviationandAeronautics ForumExpo,2021.https://doi.org/10.2514/6. 2021‐3196.
[15] A.Weideretal.,“SunSailor:SolarpoweredUAV”, 47thIsraeliAnnualConferenceonAerospaceSciences,2007.
[16] K.Papis,R.Figaj,J.Kuś,M.Zoła̧dek,andM.Zaja̧c, “Applicationofphotovoltaiccellsasasourceof energyinunmannedaerialvehicle(UAV)‐Case study”, E3SWebofConferences,vol.173,2020,5–9.https://doi.org/10.1051/e3sconf/20201730 2002.
[17] S.C.Arum,D.Grace,P.D.Mitchell,M.D.Zakaria, andN.Morozs,“Energymanagementofsolar‐poweredaircraft‐basedhighaltitudeplatform forwirelesscommunications”, Electronics,vol.9, no.1,2020,1–25.https://doi.org/10.3390/elec tronics9010179.
[18] Z.Xi,D.Wu,W.Ni,andX.Ma,“Energy‐optimized trajectoryplanningforsolar‐poweredaircraftin awind ieldusingreinforcementlearning”, IEEE Access,vol.10,no.July,2022,87715–87732.http s://doi.org/10.1109/ACCESS.2022.3199004.
[19] M.Sun,C.Shan,K.W.Sun,andY.H.Jia,“Energy managementstrategyforhigh‐altitudesolarair‐craftbasedonmultiple lightphases”, MathematicalProblemsinEngineering,vol.2020,2020.ht tps://doi.org/10.1155/2020/6655031.
[20] M.Kosuda,J.Novotñák,andM.Fiïko,“Energy‐orientedtrajectoryoptimizationofsolaraircraft usingfminconfunctioninMATLAB”, ICMT2019 -7thInternationalConferenceonMilitaryTechnologiesProceedings,2019,6–10.https://doi.or g/10.1109/MILTECHS.2019.8870090.
[21] K.Li,Y.Wu,A.Bakar,S.Wang,Y.Li,andD. Wen,“Energysystemoptimizationandsimula‐tionforlow‐altitudesolar‐poweredunmanned aerialvehicles”, Aerospace,vol.9,no.6,2022.ht tps://doi.org/10.3390/aerospace9060331.
[22] D.HrovatinandA.Žemva,“Exploitingsolar energyduringanaerialmappingmissionon alightweightUAV”, Electronics,vol.10,no.22, 2021,1–23.https://doi.org/10.3390/electronic s10222876.
[23] P.RajendranandH.Smith,“Modellingofsolar irradianceanddaylightdurationforsolar‐poweredUAVsizing”, EnergyExplorationand Exploitation,vol.34,no.2,2016,235–243. https://doi.org/10.1177/0144598716629874.
[24] S.MortonandN.Papanikolopoulos,“Two metersolarUAV:Designapproachand performancepredictionforautonomoussensing applications”, IEEEInternationalConferenceon IntelligentRobotsandSystems,vol.2016‐Novem, 2016,1695–1701.https://doi.org/10.1109/ IROS.2016.7759272.
[25] V.M.SineglazovandD.P.Karabetsky,“Energy systemdesignofsolaraircraft”, 2013IEEE2nd InternationalConferenceonActualProblemsof UnmannedAirVehicleDevelopmentProceedings, 2013,9–11.https://doi.org/10.1109/APUAVD .2013.6705267.
[26] S.Wang,D.Ma,M.Yang,L.Zhang,andG.Li, “Flightstrategyoptimizationforhigh‐altitude long‐endurancesolar‐poweredaircraftbasedon Gausspseudo‐spectralmethod”, ChineseJournal ofAeronautics,vol.32,no.10,2019,2286–2298. https://doi.org/10.1016/j.cja.2019.07.022.
[27] G.E.G.Padilla,K.J.Kim,S.H.Park,andK.H.Yu, “Flightpathplanningofsolar‐poweredUAVfor sustainablecommunicationrelay”, IEEERobotics andAutomationLetters,vol.5,no.4,2020,6772–6779.https://doi.org/10.1109/LRA.2020.301 4635.
[28] T.Zhang,X.Zhu,Z.Zhou,R.Wang,andR.Chen, “EnergymanagementofsolarUAVlevel light”, 2018IEEEInternationalConferenceonPrognosticsandHealthManagement(ICPHM),2018,16–21.https://doi.org/10.1109/ICPHM.2018.844 8508.
[29] X.Ji,K.Sun,X.Guo,andM.Sun,“Energyacquisi‐tionofsolar‐poweredjoint‐wingaircraftconsid‐eringmismatchpowerloss”, Energies,vol.15,no. 1,2022,1–18.https://doi.org/10.3390/en1501 0157.
[30] M.Wu,Z.Shi,T.Xiao,andH.Ang,“Energy optimizationandinvestigationforZ‐shapedsun‐trackingmorphing‐wingsolar‐poweredUAV”, AerospaceScienceandTechnology,vol.91,2019, 1–11.https://doi.org/10.1016/j.ast.2019.05.01 3.
[31] X.Wei,P.Yao,andZ.Xie,“Comprehensiveopti‐mizationofenergystorageandstandofftracking forsolar‐poweredUAV”, IEEESystemsJournal, vol.14,no.4,2020,5133–5143.https://doi.or g/10.1109/JSYST.2020.2964579.
[32] Y.Huang,H.Wang,N.Li,andY.Yu,“Endurance estimateforsolar‐poweredunmannedaerial vehicles”, Proceedingsofthe9thInternational ConferenceonIntelligentHuman-MachineSystemsandCybernetics(IHMSC),vol.1,2017,66–70.https://doi.org/10.1109/IHMSC.2017.22.
[33] A.AlsahlaniandT.Rahulan,“Theimpactof altitude,latitude,andendurancedurationon thedesignofahighaltitude,solarpowered unmannedaerialvehicle”, 2016International ConferenceonStudentsAppliedEngineering (ICSAE),2017,463–468.https://doi.org/10. 1109/ICSAE.2016.7810236.
[34] X.Z.Gao,Z.X.Hou,Z.Guo,J.X.Liu,andX.Q.Chen, “Energymanagementstrategyforsolar‐powered high‐altitudelong‐enduranceaircraft”, Energy ConversionandManagement,vol.70,2013,20–30.https://doi.org/10.1016/j.enconman.2013. 01.007.
[35] V.Martinez,F.Defaÿ,L.Salvetat,K.Neuhaus, M.Bressan,andC.Alonso,“Studyofphoto‐voltaiccellsimplantationinalong‐endurance airplanedrone”, 7thInternationalIEEEConferenceonRenewableEnergyResearchandApplications(ICRERA),2018,1299–1303.https://doi.or g/10.1109/ICRERA.2018.8566931.
[36] J.S.LeeandK.H.Yu,“Optimalpathplanning ofsolar‐poweredUAVusinggravitationalpoten‐tialenergy”, IEEETransactionsonAerospaceand ElectronicSystems,vol.53,no.3,2017,1442–1451.https://doi.org/10.1109/TAES.2017.26 71522.
[37] J.Wu,H.Wang,N.Li,P.Yao,Y.Huang,andH.Yang, “Pathplanningforsolar‐poweredUAVinurban environment”, Neurocomputing,vol.275,2018, 2055–2065.https://doi.org/10.1016/j.neuc om.2017.10.037.
[38] J.Wu,H.Wang,Y.Huang,Z.Su,andM.Zhang, “Energymanagementstrategyforsolar‐powered UAVlong‐endurancetargettracking”, IEEETransactionsonAerospaceandElectronicSystems,vol. 55,no.4,2019,1878–1891.https://doi.org/10 .1109/TAES.2018.2876738.
[39] M.Brizon,“Solarenergygenerationmodelfor highaltitudelongenduranceplatforms”,2014, 333–343.https://linkinghub.elsevier.com/re trieve/pii/S0960148114002857.
[40] J.Meyer,J.A.F.DuPlessis,W.Clark,andP.Ellis, “Considerationsindesignoflowaltitudelong endurancesolarpoweredunmannedaerialvehi‐cles”, SAIEEAfricaResearchJournal,vol.99,no.1, 2008,25–31.https://doi.org/10.23919/saiee.2 008.9486763.
[41] H.B.Park,J.S.Lee,andK.H.Yu,“Experiment andevaluationofsolarpoweredUAVbyvirtual lightsystem”, 201554thAnnualConferenceof theSocietyofInstrumentandControlEngineers ofJapan(SICE),2015,1052–1057.https://doi. org/10.1109/SICE.2015.7285519.
[42] E.A.Morelli,“Practicalaspectsofreal‐timemod‐elingforthelearn‐to‐ lyconcept”,2006,1–35.
[43] P.Lichota,“Multi‐axisinputsforidenti icationof arecon igurable ixed‐wingUAV”, Aerospace,vol. 7,no.8,2020.https://doi.org/10.3390/AEROSP ACE7080113.
[44] M.Jacewicz,M.Żugaj,R.Głêbocki,andP.Bibik, “Quadrotormodelforenergyconsumptionanal‐ysis”, Energies,vol.15,no.19,2022,7136.https: //doi.org/10.3390/EN15197136/S1.
[45] R.Głêbocki,M.Żugaj,andM.Jacewicz, “Validationoftheenergyconsumptionmodel foraquadrotorusingMonte‐Carlosimulation”, ArchivesofMechanicalEngineering,vol.70,no.1, 2023,151–178.https://doi.org/10.24425/ame. 2022.144075.
[46] D.Y.Goswami, PrinciplesofSolarEngineering, 3rdEdition,2015.https://doi.org/10.1201/b1 8119.
[47] J.A.D.DeceasedandW.A.Beckman, Solarengineeringofthermalprocesses,vol.3,no.3,1982. https://doi.org/10.1016/0142‐694x(82)900 16‐3.
[48] T.Muneer, Solarradiationanddaylightmodels, 2007.https://doi.org/10.4324/9780080474 410.
[49] I.Daut,M.Irwanto,Y.M.Irwan,N.Gomesh, andN.S.Ahmad,“Clearskyglobalsolarirra‐dianceontiltanglesofphotovoltaicmodulein Perlis,NorthernMalaysia”, InternationalConferenceonElectrical,ControlandComputerEngineering(InECCE),2011,445–450.https://doi.or g/10.1109/INECCE.2011.5953923.
[50] M.Sarailoo,S.Akhlaghi,M.Rezaeiahari,andH. Sangrody,“Residentialsolarpanelperformance improvementbasedonoptimalintervalsand
optimaltiltangle”, IEEEPower&EnergySociety GeneralMeeting,vol.2018‐Janua,2018,1–5.ht tps://doi.org/10.1109/PESGM.2017.8274587.
[51] W.Le,Z.Xue,J.Chen,andZ.Zhang,“Coverage pathplanningbasedontheoptimizationstrat‐egyofmultiplesolarpoweredunmannedaerial vehicles”, Drones,vol.6,no.8,2022,1–34.https: //doi.org/10.3390/drones6080203.
[52] H.HuangandA.V.Savkin,“Pathplanningfor asolar‐poweredUAVinspectingmountainsites forsafetyandrescue”, Energies,vol.14,no.7, 2021.https://doi.org/10.3390/en14071968.
[53] Y.Huang,J.Chen,H.Wang,andG.Su,“Amethod of3Dpathplanningforsolar‐poweredUAVwith ixedtargetandsolartracking”, AerospaceScienceandTechnology,vol.92,2019,831–838.ht tps://doi.org/10.1016/j.ast.2019.06.027.
[54] P.Rajendran,K.W.Lim,andK.T.Ong,“Power managementstrategybyenhancingthemission pro ilecon igurationofsolar‐poweredaircraft”, InternationalJournalofAerospaceEngineering, vol.2016,2016.https://doi.org/10.1155/20 16/9345368.
[55] Y.Huang,H.Wang,J.Chen,R.Liu,G.Su, andP.Du,“Energy‐optimalpathplanningfor solar‐poweredUAVsmonitoringstationarytar‐get”, Proceedingsofthe4thACMSIGSPATIAL InternationalWorkshoponSafetyandResilience (EM-GIS),2018.https://doi.org/10.1145/3284 103.3284110.
Abstract:
CHALLENGESINPREDICTINGSMARTGRIDSTABILITYLINKEDWITHRENEWABLE ENERGYRESOURCESTHROUGHSPARKMLLIBLEARNING
CHALLENGESINPREDICTINGSMARTGRIDSTABILITYLINKEDWITHRENEWABLE ENERGYRESOURCESTHROUGHSPARKMLLIBLEARNING
CHALLENGESINPREDICTINGSMARTGRIDSTABILITYLINKEDWITHRENEWABLE ENERGYRESOURCESTHROUGHSPARKMLLIBLEARNING ENERGYRESOURCESTHROUGHSPARKMLLIBLEARNING
Submitted:28th April2023;accepted:4th September2024
AmalZouhri,IsmailBoumhidi,IsmailBoumhidi,AbderahamaneEz‑Zahout,SaidChakouk,MostafaElMallahi DOI:10.14313/jamris‐2025‐036
Thisarticleconductsanumericalanalysisfocusedon thepredictivestabilityofsmartgrids,particularlyin connectionwithrenewableenergyresources.Thestudy leveragesSparkMLlibmachinelearningtoolstodevelop apredictivemodel.Theaimistoenhancetheunder‐standingandforecastingofsmartgridstability,with aspecificemphasisontheintegrationofrenewable energysources.Thenumericalanalysisinvolvestheuti‐lizationofadvancedalgorithmsandtechniquesprovided bySparkMLlibtoassesstheintricaterelationshipsamong variousfactorsimpactingsmartgridstability.Thefind‐ingsofthisstudycontributetotheongoingeffortsto optimizethereliabilityandefficiencyofsmartgridsin thecontextofincreasingrelianceonrenewableenergy resources.
Keywords: SmartGrid;StabilityPrediction;Renewable EnergyResources;SparkMLlib;MachineLearning;Pre‐dictiveModeling;GridStability;EnergyForecasting;Data Analysis.
1.Introduction
Inthepursuitofachievingasustainableand resilientenergyfuture,theintegrationofrenewable energyresourcesintosmartgridshasbecomeapiv‐otalfocus.Astheglobalenergylandscapeundergoes aprofoundtransformation,theneedforaccurateand ef icientstabilitypredictiontoolsinsmartgridshas neverbeenmorecritical.Thisarticlepresentsacom‐prehensivenumericalanalysisthatdelvesintothe predictivestabilityofsmartgrids,intricatelylinked withthedynamicsofrenewableenergyresources.Our approachinvolvesharnessingthepowerofSparkML‐libmachinelearningtoolstodevelopasophisticated predictivemodel,enablingadeeperunderstanding ofthecomplexinterplaybetweenrenewableenergy integrationandsmartgridstability.
Theescalatingadoptionofrenewableenergy sources,suchassolarandwind,introducesunique challengesandopportunitiesforpowersystemopera‐tors.Unlikeconventionalpowersources,theintermit‐tentandvariablenatureofrenewableenergyneces‐sitatesadvancedpredictiveanalyticstoensuregrid stability.Smartgrids,equippedwithmoderncommu‐nicationandcontroltechnologies,offerapromising frameworkforaddressingthesechallenges.Theinte‐grationofmachinelearningtechniques,particularly
thoseofferedbySparkMLlib,holdsimmensepoten‐tialtoenhancethepredictivecapabilitiesrequired formaintainingthestabilityandreliabilityofsmart gridsamidstthegrowingshareofrenewableenergy intheenergymix.Thisresearchismotivatedbythe imperativetobridgethegapbetweenthedynamic natureofrenewableenergygenerationandthesta‐bilityrequirementsofsmartgrids.Arobustpredic‐tivemodelcanempowergridoperatorswithtimely insights,enablingthemtoproactivelymanageand mitigatepotentialstabilityissues.Byleveragingthe capabilitiesofSparkMLlib,whichprovidesscalable anddistributedmachinelearningalgorithms,weaim tocontributetothedevelopmentofadvancedtools thatcanadapttotheevolvingnatureofsmartgridsin theeraofrenewableenergydominance.
Theprimaryobjectivesofthisarticleare: ‐ Investigatetheimpactofrenewableenergyresource integrationonthestabilityofsmartgrids.
‐ DevelopapredictivemodelusingSparkMLlibto forecastsmartgridstabilityundervaryingcondi‐tionsofrenewableenergygeneration.
‐ Evaluatetheeffectivenessoftheproposedmodel throughrigorousnumericalanalysisandsimula‐tions[1].
TheadventoftheInternetofThings(IoT)andbig datahasbroughtaboutasigni icanttransformation inthe ieldofsmartbuildings.Smartbuildingsare designedtobemoreenergy‐ef icient,sustainable,and responsivetotheneedsoftheiroccupants[2–5].By integratingIoTtechnologiesandharnessingbigdata [6],thesebuildingscanoptimizeenergyconsump‐tion,improveoccupantcomfort,andenhanceoverall operationalef iciency[7,8].Onekeyaspectofsmart buildingsisthecollectionandanalysisofvastamounts ofdatageneratedbyvarioussensorsanddevices installedwithintheinfrastructure.Thesesensorscon‐tinuouslymonitordifferentparameters,suchastem‐perature,humidity,occupancy,lighting,andenergy usage,amongotheraspects[9–13].Thedatacollected isthenprocessedandanalyzedusingsophisticated algorithmsandarti icialintelligencetechniquesto gainvaluableinsightsintobuildingperformanceand occupantbehavior[14].
Energyconsumptionisamajorconcerninmod‐ernsociety,andsmartbuildingsaimtotacklethis challengebyemployingIoT‐basedsensornetworks forreal‐timedatacollection.Thedatacollectedfrom
thesesensorsallowsbuildingmanagerstooptimize heating,ventilation,andairconditioning(HVAC)sys‐tems,lighting,andotherenergy‐consumingcompo‐nents,leadingtoreducedenergywastageandcost savings[15–17].Moreover,theintegrationofsmart buildingtechnologiesenablesbetterpredictionand controlofenergydemand,whichisparticularlycru‐cialintoday’senergy‐constrainedworld.Advanced energystoragesolutions,suchassmartphasechange material(PCM)walls,canhelpstoreexcessenergy andreleaseitduringpeakdemandperiods,making buildingsmoreenergyindependentandresilient[18]. Additionally[15–19],smartbuildingspromoteoccu‐pantwell‐beingbymonitoringindoorenvironmen‐talquality(IEQ)factors,suchasairquality,temper‐ature,andhumidity.IoT‐basedairqualitysensors candetectcommoninsulationproblemsandensure healthyindoorenvironmentsbytimelydetectionand addressofissuesrelatedtoventilationandaircircula‐tion.ThecombinationofIoTandbigdatatechnologies hasopenedupnewpossibilitiesforenhancingenergy consumptioninsmartbuildings.Throughtheinte‐grationofintelligentsystems,data‐drivendecision‐making,andoptimizedresourceutilization,smart buildingsarerevolutionizingthewayweconstruct, manage,andinhabitourbuiltenvironments,leading ustowardsamoresustainableandenergy‐ef icient future.
Theincreasinginterestinintelligentbuildingsand theemergenceofnewtechnologiesinthisareahas resultedinanumberofstudiesthataimedatimple‐mentingdifferenttypesofapplications.Theseinclude energyoptimization,simplifyingbuildingmanage‐ment,improvingresidentcomfort,reactivealarm management,personalprotection,assetprotection, intrusionmanagement,andmore.Recentresearch hassuggesteddescribingbuildingswithconsistent metadatamodeling.Thesepracticesarebasedonsen‐soryontologies,subsystemsandrelationships,ensur‐inginteroperabilityandportabilityofapplications.At present,wecannottalkaboutsmartbuildingswithout mentioningtwoinseparablecomponents,namelythe InternetofThings(IoT),whichismadeofallthecon‐nectedsensorsandthestorageenvironmentforthe datageneratedbythesesensors.Ithasbecomethekey technologicalelementinsmartbuildings.Anymodern constructiondesignedtobesmartneedstoincorpo‐rateconnectedobjects.Inaddition,itisimpossibleto makesuchbuildingssmartanddynamicwithoutana‐lyzingthedatageneratedbythismassofconnected objects.Oneofthemostrecentadvancesinthis ield istheintelligentbuilding,whichisahighlyenergy ef icientarchitecturecapableofcontrollingthe storage,distribution,andsupplyofenergy.Itaims toachievearationalconsumptionbyusingthetech‐nologiesofconnectedobjects(IoT)andmassdatapro‐cessing.Thisnotioncallsforaconceptcalled“smart grids”,currentlyusedinelectricitydistributionnet‐works,tomanageenergyinthebestpossibleway. Thisinvolvestakingintoaccountalltheactionsof stakeholders(consumers,users,andproducers)in
ordertomodifytheproductionanddistributionof energyaccordingto luctuationsindemand,particu‐larlyconsumptionpeaks.Thismethodreduceswaste andimprovesenergysupply.Theinhabitantsofa buildingcanbeassuredofabalancedproductionand distributionofenergybyapplyingthisideatothat speci icstructure.Themainpurposeofthisworkisto examineexistingdocumentationonsmartbuildings, focusingonIoTandBigData,whicharethetwomajor technologycomponentsinourcontext.Thispaperis structuredasfollows:
Itintroducestheconceptofintelligentbuildings andrelatedtechnologies.Thenitfocusesonthe ield oftheInternetofThings,itsarchitectureanditsappli‐cations.Thissectionisfollowedbyanoperationstest andexaminesanalyticalapproachesappliedbasedon abigdataecosystem.Aconclusionforthispaperisa inalstep.Thepaperisorganizedasfollows:theintro‐duction;therelatedworkinsection2;section3pro‐videsanoverviewofsmartgrids;section4discusses bigdatapredictiveanalyticsforsmartgridstability; theresultsanddiscussioninsection5, inallysection 6forconclusionandperspective.
Thissectionconcernstheanalysisofbuildings tounderstandenergyuse.Theinitialsolutionswere mainlyaimedatusingnondeterministicmodelsbased onsimulations.Avarietyofsimulationtoolsareavail‐ablewithdifferentcapacities.Parketal.estimatedthat researchintotheapplicationofbigdatatosmartcity constructioninvolvesbuildingatechnicalframework forthedevelopmentofsmartcitiesfromthepointof viewofexploring,managing,analyzing,andapplying datapaths.Talarisetal.haveanalyzedtheseandfound that,whilesearchanglesarevaried,thesesearches arebasedonwebAPIinformationintegration.Meta‐data,semanticaggregation,andknowledgegraphics technologyremainattheconceptuallevel,andhowto makegooduseofbigdatatechnologyneedsfurther clari ication.Simonetal.discussthatifalargersystem isrequiredtoextractdatafromtheenergyef iciency managementplatformatalaterstage,thisisoften notfeasible.Evenwherepossible,itisnecessaryto customizethedevelopmentofinterfacesandcorre‐spondingtransmissionprotocols,whichislengthyand expensive.Atpresent,thedevelopmentandconstruc‐tionofsmartbuildingsathomeandabroadarein thedevelopmentandexplorationstage.Jiangetal. believethattheenergyef iciencyofbuildingsdepends ontheuseofintelligenttechnologiesformeasuring theenergyconsumptionofbuildingsandanalyzing theenergyef iciencyofequipment,adoptionofsys‐temsintegrationmethodsinordertobuildplatforms formeasuringandmanagingenergyconsumption, andthroughglobalmanagementoftheenergyef i‐ciencyofbuildingsinthesupplyofhotwater,light‐ing,appliances,andotheraspectsinordertoobtain betterenergysavingeffects.InChrysietal.(2020), EnergyEf iciencyinSmartBuildings,opportunitiesin thepowersectorofsmartcitiespresentpractical
approachestoenhanceenergyef iciencyandenviron‐mentalsustainabilitythroughtheadoptionofsmart buildingtechnologiesandIoT‐basedenergymanage‐mentstrategies.Thisisachievedbyanon‐linearmodel linkingpowerdemandtotherequiredtemperature pro ile.Ageneticalgorithmbasedonsuchamodel isthenusedtooptimizeenergyallocation,tomatch theuserthermalconstraints,andthereforetoallow themixed‐integerdeterministicoptimizationalgo‐rithmtodeterminetheremainingenergymanage‐mentactions.Consequently,amoreintegralvisionis neededtoprovideaccuratemodelsofenergyusedin buildings[21].
3.1.SmartGrids
A“smartgrid”referstoanelectricalenergydis‐tributionsystemthatautonomouslyadjuststopro‐ductionanddemand.Toachieveoptimalsafetyand energyef iciency,thesmartgridintegratesandmodi‐iesproductionandconsumptionmodels.Thisisfacil‐itatedbyanetworkofsensors,real‐timedatatrans‐mission,analysistools,bigdata,andotheradvanced techniques.
3.2.CharacteristicsofSmartGrids
Thesmartgridemergesasaproposedsolution toaddressamyriadofchallengesplaguingtradi‐tionalelectricitygrids,includinglowreliability,fre‐quentoutages,highgreenhousegasemissions,eco‐nomicinef iciencies,safetyconcerns,andenergysecu‐rityissues[34].De inedasacommunicationnetwork overlaidontotheelectricitygrid,thesmartgridaims tocollectandanalyzedatafromdiversepowergrid components,enablingthepredictionofpowersupply anddemandforeffectivepowermanagement[8].
Foracomprehensiveunderstandingofthecharac‐teristicsandadvantagesofthesmartgrid,athorough comparisonwithconventionalpowergrids,andan explorationofthegeneralrequirementsforcommuni‐cationnetworkswithinasmartgrid,extensiveinsights canbefoundinexistingliterature[7].TheNational InstituteofStandardsandTechnologyhasproposeda modelthatidenti iessevendomainswithinthesmart grid,eachwithde inedrolesfacilitatinginformation exchangeanddecision‐making[7].
Keyfunctionalitiesessentialfortheimplementa‐tionofthesmartgridinclude:
‐ CommunicationNetworks:Involvingpublic,private, wired,andwirelesscommunicationnetworks,serv‐ingastheinfrastructureforsmartgridcommunica‐tion[36].
‐ Cybersecurity:Addressingmeasurestoensurethe availability,integrity,andcon identialityofcommu‐nicationandcontrolsystemsessentialformanaging, operating,andsafeguardingsmartgridinfrastruc‐tures[37].
‐ DistributedEnergyResources:Encompassingvari‐ousformsofgeneration,includingrenewableener‐gies,andstoragesystemsintegratedintodistributed systems[38].
‐ DistributionGridManagement:Strivingtooptimize theperformanceofdistributionsystemcompo‐nents,enhanceef iciency,andintegratethemwith transmissionsystemsforincreasedreliabilityand improvedmanagementofdistributedrenewable energysources[39].
‐ ElectricTransportation:Integratingplug‐inelectric vehiclesonalargescale[27].
‐ EnergyEf iciency:Providingmechanismsforcus‐tomerstoadjusttheirenergyusageduringpeak hoursandoptimizingthebalancebetweenpower supplyanddemand[28].
‐ EnergyStorage:Utilizingdirectorindirectenergy storagetechnologiessuchaspumpedhydroelectric storage[29].Othercriticalcomponentsofthesmart gridinclude:
‐ Wide‐AreaMonitoring:Monitoringpowersystem componentsoveralargegeographicareatoopti‐mizeperformanceandpreventissuesproactively [30].
‐ AdvancedMeteringInfrastructure(AMI):Serving asabidirectionalcommunicationnetworkbetween smartmetersandtheutilitysystemforcollecting, sending,andanalyzingconsumerenergyconsump‐tiondata[31].
AMI,anenhancedversionofautomaticmeter reading,playsacrucialroleinself‐healing,adaptive powerpricing,demand‐sidemanagement,energyef i‐ciencyimprovement,reliabilityenhancement,inter‐operability,powerqualitymonitoring,outageman‐agement,andcommunicationbetweenthecentralsys‐temandsmartmeters[32].TheAMIcomponents includeacentralsystem,two‐waycommunicationnet‐works,dataconcentrators,andsmartmeters.These elementsenablefunctionssuchasdirectloadcon‐trol,wheresmartmetersprovidepowerconsumption overviewsandscheduletimesfordeviceoperation toshifttheloadwithinthesmartgrid.Theinter‐connectivityofdistributedenergyresources,elec‐tricvehicles,gateways,homeenergydisplays,smart devices,smartmeters,andtoolsforpowerconsump‐tioncontrolisfacilitatedthroughahomeareanet‐workusingtechnologieslikeBluetooth,IEEE802.11b, IEEE802.11s,IEEE802.3az‐2010,powerlinecom‐munication,andZigBee[33].Smartmeterssenddata todataconcentratorsthroughaneighborhoodarea network(NAN).NANs,resemblingthecoverageof a ieldareanetwork(FAN),utilizevariouscommu‐nicationnetworksandtechnologiessuchasfamily standardsofIEEE802.11,wirelesscellularnetworks (e.g.,LTE,WiMAX),andopticalnetworks[34].Data concentratorsplayacrucialroleinaggregatingand compressingdatafromsmartmetersinuplinkcon‐nectionsandrelayingdatatosmartmetersindown‐linkconnections.Whileenhancingscalabilityandreli‐ability,dataconcentratorsreducepowerconsumption ofsmartmetersbutintroduceaslightdelayintrans‐mittingdata[35].Somedataconcentratorsconnect tothecentralsystemthroughawideareanetwork
(WAN)usinglong‐range,high‐bandwidthcommunica‐tiontechnologieslike iberopticandwirelesscellular networks(e.g.,WiMAX,LTE,andLTEadvanced)[36]. Thecentralsystem,connectedviaalocalareanet‐work,collectsandanalyzesdatafromsmartmeters, incorporatingcomponentssuchasameterdataman‐agementsystem,geographicinformationsystem,out‐agemanagementsystem,consumerinformationsys‐tem,powerqualitymanagement,andloadforecast‐ingsystems[36].Forinstance,ameterdatamanage‐mentsystemreceivessmartmeters’data,storesitin databases,andprocessesit[33].
3.3.InternetofThings(IoT)
The“InternetofThings”(IoT)referstoadis‐tributednetworkconnectingphysicalobjectscapable ofcommunicatingwitheachother,otherdevices,or computers.Theseobjectscandetectoractupontheir environment.Thedatatransmittedbythesedevices canbecollectedandanalyzedtorevealinsightsand suggestactionsthatsavemoney,increaseproductiv‐ity,orimprovethequalityofgoodsandservices.
3.4.ConnectedObjects
InthecontextoftheInternetofThings,a“con‐nectedobject”denotesanyelectronicdevicecapable ofcommunicationandinformationexchangeviaa PC,portablecomputer,tablet,oranydeviceequipped withwirelessorBluetoothconnectivity.
3.5.CharacteristicsofConnectedObjects
Connectedobjectspossessthefollowingdistinc‐tiveattributes:
‐ Identi ication:Eachobjecthasauniqueidenti ica‐tioncode,suchasabarcode,IPaddress,orRFIDtag.
‐ EnvironmentalAwareness:Theseobjectsare equippedwithdetection,analysis,treatment,and alertingcapabilities,makingthemsensitiveto theirsurroundings.Theycanmeasureparameters liketemperature,humidity,gaslevels,andenergy consumption.
‐ Interactivity:Theconnectionbetweenanobject andthenetworkcanbepermanentortemporary, dependingontheobject’sspeci icneedsandfunc‐tion.
‐ VirtualRepresentation:Eachconnectedobjecthasa uniquesignatureandphysicalmanifestation,repre‐sentedvirtuallyintheIoTsystem.
3.6.TheConstituentPartsofIoT
FiveessentialcomponentsconstitutetheIoTsys‐tem:
‐ Sensor:Measuresexternalparametersintheenvi‐ronment.
‐ EmbeddedSoftware:Allowstheconnectedobject tostore,retrieve,process,andevaluatedatabefore transmission.
‐ TransmissionChip:Facilitatesdatatransmission afterprocessing.
‐ CustomerInterface:Renderstransmittedinforma‐tionunderstandableandusefultotheuser.
‐ Battery:Providespowertotheconnectedobjects, enablingtheirfunctionality.
4.HomeAutomationanditsObjectives
4.1.HomeAutomation
Theterm“demotics”derivesfromthecontraction ofthewords“house”and“automatic”,andreferstothe technological ieldthatdealswiththeautomationof thehouse.Itisthesettingupofnetworkslinkingthe differentequipmentinthehouse(suchasthehi isys‐tem,thehomeautomation,thekitchenandbathroom appliances).
Itincludesawiderangeofservicesallowingthe integrationofcontemporarytechnologiesinthehome.
Asaresult,wemaydistinguishbetweentwoareas ofapplicationhomeautomation:
‐ Themanagementofenergy low(water,gas,and electricity),whichincludesthecontrolofheating, lighting,ventilation,andhouseholdappliances.
‐ Thecontrolofinformation lowcomingfromthe computer,radio,andphone.
4.2.ObjectivesofHomeAutomation
Homeautomationcontributessigni icantlytothe realizationofaperfectlifetothehumanbeing,with fourmainobjectives(comfort,security,energysaving andhealth).
Comfort
‐ Opendoorsandwindowswithoutforceusingthe cellphone.
‐ Turnonandoffthelightremotely.
‐ Airconditioningofthehouse(hotinwinterandcold insummer).
‐ Therefrigeratordeclaresitsneedforfoodthrougha messageonmobile.
‐ Createlifescenariosandautomateyourhome. Thesecurity
‐ Protectthehouseagainsttheft.
‐ Avoidaccidentsofburntgas, ireandelectrocution.
‐ Centralizethehouse(alldoorsandwindowsclose).
‐ Monitorthehouseremotelythroughcamerasand alarms.
‐ The ixedtelephoneautomaticallycallthe ire departmentincaseofemergency.
Energysaving
‐ Controlthelightingofthehouse.
‐ Setthemachinesforacertainperiodoftime,like washingmachines.
‐ Turnoffenergyconsumingobjectsifyouarenot goingtousethem,forexampleifyouaresleeping andleavetheTVon.
‐ Controlthethermalexchangeswiththeoutside. Optimizationofdomestichotwaterproduction Health
‐ Homeautomationhelpstheelderlyanddisabledto handlethingsinthehouses.
‐ Sensorsandmeasurementsofthehealthofpatients suchasbloodpressure,bodytemperatureandblood sugarlevels.
‐ Makemedicalvisitsremotelythroughspecialequip‐mentplacedinthehome.
Fig.1.Representingtheconnectedobjectsused inthesimulation
1) InternetofThings(IoT)canbecharacterizedas theinterconnectionofindividualsandobjects regardlessoftime,location,andthemeans employed,involvinganythingandanyone.This broadde initionencompassesaspectssuchas convergence,content,repositories(collections), computing,communication,andconnectivity. Inthiscontext,aseamlessinterconnectionis establishedbetweenpeopleorhumansand things,and/oramongdifferentthings
2) Programmableobjectsandtestobjects:forthetest wewilluseobjectslike ire,andforthemovement, weusethemovementofthemouse,aswellasusing programmablecardsliketheMCU.
3) Theintermediateequipment:Therouter,the switch,
HomeGetway,themodem,thecloud,theserversto controloursystemandanantennaforthecellularnet‐workaresomeoftheintermediatedevicesweused.
4.3.ConfigurationOutsidetheBuilding
1) Routercon iguration:ThetwoIoTandDNS servers,aswellastheCloud,thecentralof ice serverandtheSwitch,areallconnectedtothe routerthroughitsthreeGigabitEthernetports. Wewillcon igureitontheCLI.
2) Con igurationoftheservers:Wehavetwoservers tocon igureIOTserverandDNSserver,forboth wewillspecifyanIPaddressplustheaddressof GetwayandDNS.
3) The3G/4Gcellularnetwork:Wehavechosenacel‐lularnetwork(3G/4G),whichallowsustoconnect totheserverviaasmartphoneatgreatdistances, inordertohavethepossibilitytoremotelycontrol alltheequipmentconnectedtotheIoTserver.
4.4.ConfigurationInsidetheHouse
1) HomeGetway:itsroleistolinkallconnected objectseitherwiredorwirelessandgivethemIP addresses.Wehavesecuredthesystemagainst hackersbyWPA2‐PSKauthenticationwithapass‐word.Thistypeisthemosteffectiveandtakesa longtimeforthehackertoaccessthenetwork.
2) Theconnectedobjects:Wehaveconnectedthe objectswiththeHomeGetwayinawirelessway wherewehavemadeamodi icationinthenet‐workcard(changetoWiFitype)andrequireusers toclickontheSmartDevicebuttonsothatthey havethepossibilityofaccessingthenetwork.The programmingwillusethemicrocontroller“Boards MCU”.Thisequipmentisprogrammabletocontrol andcommandataskinthedesiredway.Wehave chosentheScriptlanguagedescribedinFig.2.
Thecreationoftheconditionsrequiresthatthe objectsworkatthesametimeoroneaccordingtothe other:therewillbeamasterobjectandslaveobjects. Whenthemasterobjectturnson,theslaveobjectsalso turnonandthesamegoesforturningoff.
Intelligentbuildingplanning(Fig.3)simulatesjust oneapartmentinthebuilding.Itsprototypeiscom‐posedofabedroom,alivingroom,akitchen,abath‐room,andacorridor.
Wehaveplacedourobjectsintheapartmentina homogeneouswayinordertocoveralltheapartment, WehaveplacedtheHomeGetwaysothatitisconver‐genttoalltheobjectsandsothattherewillnotbecuts ofconnectionoraweakeningof lowwhenwecontrol sometasks,namely:
‐ thesecuritysystem: byusingthesurveillancecameraequippedwitha motiondetectorandasiren.Thus,whenthedetec‐tordetectsamovement,thewebcamrecordsevery‐thingthathappensandthealarmsounds.
‐ Firedetectionsystem:
Wealsotestedthe iredetectionsystem,andfound thatassoonasa ireisdetected,thedoorsopen, thealarmgoesoff,givingpeopletimetoescapethe building.
‐ Buildingtemperaturecontrolsystem:
Inthissystem,weplacedathermostatthatmea‐suresthetemperatureofthebuildingafteritturns ontheairconditionerorthefurnaceaccordingtothe measuredtemperature.
‐ Controlofdoorsandwindows:
Oneofthefunctionsofanintelligentbuildingisthe remotecontrolofdoorsandwindows.Astheseare connectedtothehomenetwork,wecanopenand closethemusingoursmartphones.
‐ Lightingcontrol:
Wecanalsocontrolthelightinthesmartbuild‐ingeitherautomaticallywiththemotionsensorsor withthesmartphoneusingtheIoTmonitorapplica‐tion.AsshowninFig.4,wecanaccessthenetwork andtheIoTserverthroughoursmartphone,PC,and tablet.
5.EnergyEfficiencyintheFieldofIntelligent Buildings
Whenthebuilding’sequipmentisintelligentlyand effectivelyinterconnected,wecaneasilymanageand controltheenergyconsumptionthrougharemote controlthatenablesthepilotingoftheseconnected devicesthroughacellphone.Bydoingso,wecan instantlydetectanyunusualvaluethatwillbehigher thantheaverageconsumptionbyenergyclassand identifymorequicklytheerrors, laws,andirregular‐itiesinthefunctioning.
Whenwetalkaboutthereductionofenergycon‐sumption,wearenecessarilytalkingaboutbuildings, sincetheyofferahighpotentialforenergysavings
Figure1. ArchitectureIoTconnectedobjects[37].
Figure2. ProgrammingtheMCUBoard. andrepresentmorethan40%ofthetotalenergycon‐sumption.
Dailyliferequiresalotofenergy(seeFig.5):cool‐inginsummer,lightingatnight,hotwaterandmany otheractivities.Ourenergysupplyrelieslargelyon
fossilfuels,thecombustionofwhichgeneratesCO2 emissions.
Buildingsareresponsibleforthelargestshareof CO2emissionsindevelopedcities.
Buildingscanbeclassi iedaccordingtoenergy classesrangingfromclassA–from0to50kWh/m2 peryear(mostef icienthousing)–toclassGof451 kWh/m2 andmore(veryenergyintensive).Wecon‐sideralowenergybuilding(BBC)whentheconven‐tionalconsumptionofprimaryenergyofthebuilding forheating,cooling,ventilation,hotwaterproduction andlightingislessthanorequalto50%ofthecon‐ventionalconsumptionreference(50kWh/m2/year). ConsumptionisexpressedinkWhofenergyand broughtbacktothesquaremeterofsurface.
Themainobjectiveistoreducetheneeds–“pas‐sive”energyef iciency–andtosuperviseandman‐agethetechnicalequipmentofthebuilding–“active” energyef iciency.
Thisgivesenergygainsbyactingondifferent humanandmaterialparameters.Amongbestprac‐ticesistheuseofef icientproducts,toreduceenergy consumption.Itisessentialtochooseequipmentwith
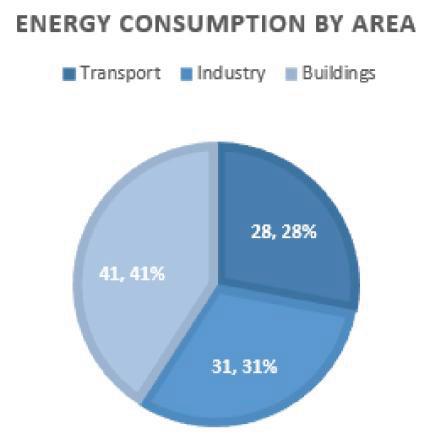
thebestpossibleenergyef iciency,thatistosaythe bestratiobetweenenergyconsumedandtheservice provided.
Ontheotherhand,theintegrationofrenewable energies,theuseoftheseenergiesinanapproachof energyimprovement,allowsonetoobtainapartofthe energynecessarytothebuilding(electricity,heating, sanitaryhotwater)inarenewablewayandthusto decreaseoreveneliminatetheexternalenergycontri‐bution.Thusmetering/measurementofconsumption isneeded:theenergymanagementofabuildingcon‐sists irstofallincounting/measuringtheconsump‐tion.
Forelectricalandgas,aclassicinstallation includesageneralmeterwhichprovidestheglobal consumptionfortheirinvoicingbytheenergy distributor.Anoptimizedinstallationincludes,in additiontothegeneralmeter,permanentsub‐meters. Theirmainroleistoestablishthedistributionof energyconsumptionbyitem(heating,domestichot water,ventilation,etc.).
Thecountingormeasurementofconsumption allowstherealizationoftheenergybalance,the awarenessbytheuserormanagerofconsumption, andisusedfortheestimationoftheenergysaving potential.Italsoguaranteesafollow‐upintimeofthe energyperformance.
‐ multiplythepowerofyourappliances(inKW)by thetimeofuse(inhours);
‐ thenmultiplyitbythepriceperkilowatt‐hour. Theresultwillallowyoutoknowwhichappliances consumeexcessiveamountsofenergy.
6.RelationshipofBigDatawithIntelligent
Facedwiththeevolutionofscience,technologies areevolvingatthesametime,amongthemtheIoT, orInternetofThings.ItconnectsobjectstotheInter‐net,andthisgeneratesthe lowofdatathathasbeen
generatedthroughtheobjects.Theseinnovationscan thenbelinkedtoBigData.
TheIoTandBigDatacoexist,toallowforsignif‐icanttechnologicaladvances,asthevolumeofdata exchangedincreasesasthenumberofobjectscon‐nectedtotheInternetmultiplies.
Thedatacollectedbytheconnecteddevicescan beusedinrealtimeoperations,suchasmonitoring energyconsumption,andcanenablereactionsaccord‐ingtothesituation:changeorrepairorotherpropos‐als.
Thesystemcanincorporatefunctionstocontrol theenergyconsumedbythedevicesaccordingtothe wishesoftheuser.Theapplicationisthereforenoti‐iedifelectricityconsumption,forinstance,exceedsa thresholdvaluesetbytheuser.
SmartIoTdevicescancollectenergyusagedata fromeachunitandstoreitinadatabasethatcanbe analyzedandreportedonforenergyconservationand analysis.
Buildingscannotbemadeintelligentordynamic without irstexaminingthedataproducedbythisvast networkofinterconnectedthings.Settingupaproper ecosystemtostore,clean,andpreparethedataisthe irststepintheanalysisprocess.Butforsmartbuild‐ings,storingandretrievingvastamountsofdatain realtimeisadif icultoperation.
Ingeneral,therearethreetiersthatmakeupan intelligentsysteminanintelligentbuilding:Atthe inputdatainfrastructurelevel,allthedatasources producedbythelinkedbuildingobjectsarerep‐resented,includingenergyusage,humiditylevels, indoorandoutdoortemperatures,etc.Thesystem infrastructurelevel,whichenablesthegathering,pro‐cessing,combining,andstorageofdatainaNoSQL database,servesasthebrainoftheintelligentsys‐tem.Asaresult,itpermitstheuseofthisdatafor reportingpurposesonly,orforknowledgeextraction bydataminingalgorithmsormachinelearningby arti icialintelligencealgorithms.Thesystem’scatalog ofservicesthatareavailabletobuildingmanagers, inhabitants,energysuppliers,etc.isrepresentedby theservicelevel.
ThreelayersmakeuptheIoTarchitecture:
‐ Thelayerofperceptionisinchargeofsensingand datagathering.
‐ Datatransitishandledbythenetworklayer,which alsoenablesthefusionofdifferentdevicesandcom‐municationinfrastructure.
‐ Thetoplayerwhereusersinteractisknownasthe applicationlayer.
Severalapplications,includingthefollowing,will resultfromtheuseofIoTinsmartbuildings:Accessto buildingfacilitiesthatis lexibleandreal‐time.Energy managementwhichisthemacroviewofenergyusage inrelationtobuildingenergyef iciency.Locationof resourcesandoccupants,increasingindoorcomfort.
Fig. 6 representsthechoiceofbigdatatechnol‐ogy.Anenormousamountofdataisgeneratedevery secondinthiscontextofintelligentbuildings,and itapproachescriticallevels.Forprocessingmassive
amountsofdata,numeroussolutionshavebeenput forth.AlthoughSparkandHadoop,thetwomost popularproductsonthemarket,arebothlarge‐scale dataframeworks,theirapplicationsaresomewhatdif‐ferent.Iftheoperatingandreportingrequirements arelargelystaticandwecanwaitforthebatchpro‐cessingto inish,theMapReducemethodofoperation mightbeenough.Ontheotherhand,wewillprobably needtouseSparkifweneedtoanalyzestreamingdata, suchasanalyzingsensordatainasmartbuilding,orif theapplicationscallforaseriesofactions.
Sparkistheidealsolutioninthissituation.The processofexaminingvariousformsofdatatodraw patternsandinformationusingvariousdatamining techniquesisknownasknowledgeextractionfrom data.Theanalysisofthismassiveamountofdatacon‐tributestotherealizationoftheworldwidegoalof smartbuildings,whichistosimplifybuildingman‐agement,cutenergyuse,secureresourcesandpeople, andprovideamoreconvenientlivingenvironment.
Inordertoexamineenergyconsumption,weuti‐lizedadatasetnamed“HomeC”whichcomprisesvar‐iousobjectsandroomsthathavebeenmodeledafter real‐lifecounterparts.
InFig. 7,wediscovertheenergyconsumptionof eachindividualroomandobject.Weobservedthat someroomshadhigherconsumptionlevelsthanoth‐ers.Ourgoalwastoreducethisconsumption.To achievethis,weanalyzedtheobjectspresentinthese roomstoidentifypotentialcandidatesforremovalor replacement.
OurdatasetisthusintheformofaCSV ile,includ‐ingweatherdataaswellashouseholdappliancemea‐surementsfromasmartmeterfor365daysinaperiod of1minute.Thetypesofvariableareimportantfor datavisualization:
Use[kW]:Totalenergyused,
Gen[kW]:Totalenergyproducedusingsolaror otherenergysources,
Houseoverall[kW]:Representstheoverallenergy consumptionofthebuilding.
AfterreadingthedatafromSpark,wewillper‐formdatapreprocessing.Thisinvolvesrenamingthe columnstoremovespacesandtheunit[kW],delet‐ingthevalues,groupingsomecolumns(suchasthe consumptionofthekitchenswehaveinthebuilding), andchangingtheformatofthetimeinsecondstoY‐m‐dH‐M‐S.Thus,theinformationwillbeavailablefrom 2021‐01‐015:00:00to2021‐12‐1703:29:00.Then wewillreorganizethecolumns.ThedatainFig.8 representinformationandwillappearlikethis: Wecandifferentiatebetweenenergydataand weatherdata.
Todeterminethemonthinwhichwewillconsume themostenergy,wecanseethetotalenergyconsump‐tionforallthemonths.

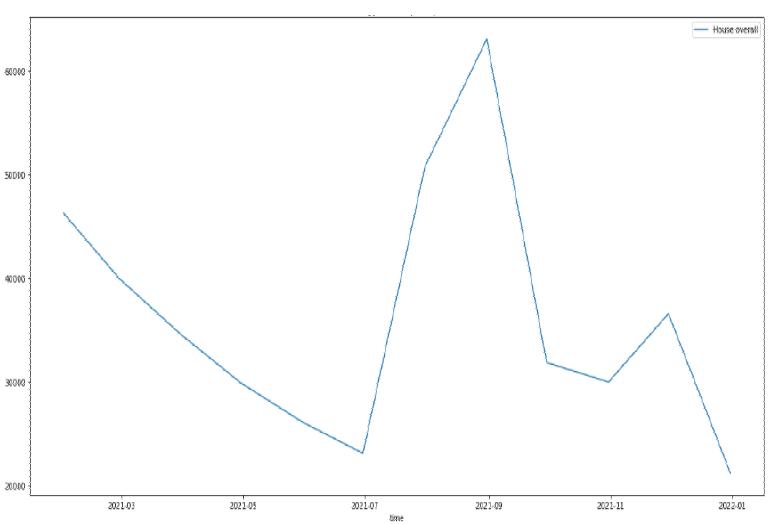
Figure7. Overallenergyconsumptionpermonth.
Figure8. Informationaboutthedata.
Afurnaceconsumeselectricitytopowerthefan thatcirculatesheatedairthroughoutabuilding,as wellastoignitethegasoroilusedtogenerateheat. Fig.9representsconsumptionfordevices.Electricity consumedbyafurnacedependsonseveralfactors, includingthesizeoftheunit,theef iciencyrating,and thelengthoftimeitisinuse.Inourdata,thefurnace consumesmorethan63%ofelectricalenergy.
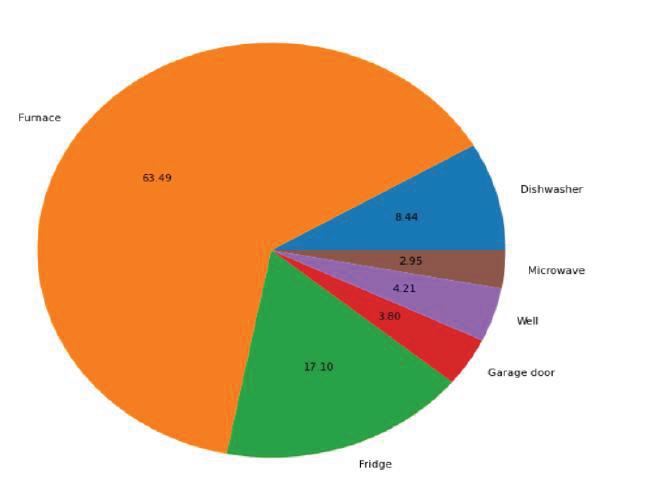
Consumptionfordevices. WeutilizedtheK‐meanstechnique,whichdivides thedataintoapredeterminednumberofclusters,to identifytheclasses.Asaresult,therearetwoclasses ofroomenergy:
‘Homeof ice,”“Winecellar,”“Kitchen,”“Barn,”and “Livingroom.”Thereisalsoaclassofdevicesenergy thatcomprises“Dishwasher,”“Furnace,”“Fridge,” “GarageDoor,”“Well,”and“Microwave.”
Let’sassumetheclassofroomsinordertobet‐terunderstandhowwecanmanagetheenergycon‐sumptionoftheconnectedmachinesintheintelligent building.Wewillmonitortheconsumptionofeach memberoftheclasssothat,ifoneofthemexceeds theaverageof0.22054800000000002kW,wemust decidetoremoveit.Thisismadepossibleby communicationbetweendevices.Herewehave analyzedthecaseofonedayonly,butwecangener‐alizeitlaterforallthedays.
Fig. 10 showsthatthekitchenusesasigni icant amountmoreenergythantheaverage.
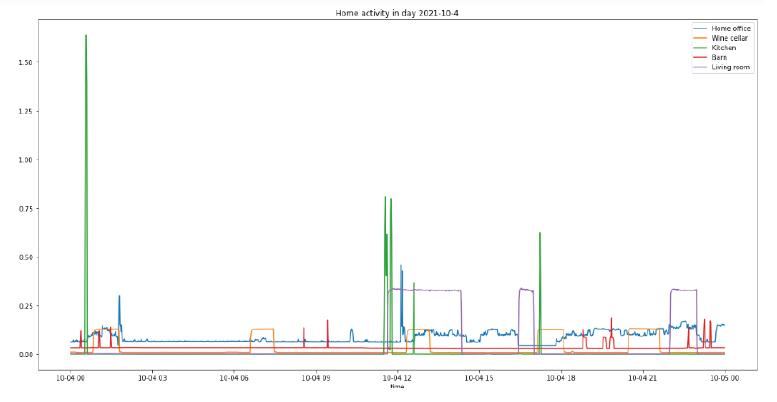
8.Conclusion
Inconclusion,thispaperprovidedanoverview oftheInternetofThings(IoT)asanetworkofnet‐works,delvingintoitshistoricalevolutionandexplor‐ingthreekeyvisionsandassociateddevelopments. Thefocusthenshiftedtothesmartgrid,apivotal applicationofIoT.Thediscussionencompassedthe architectureandcomponentsofasmartgrid,followed byanexplorationofIoTarchitecturestailoredfor smartgrids.Additionally,thepaperscrutinizedthe prerequisitesforintegratingIoTinsmartgrids,delv‐ingintoapplicationsandserviceswithinthiscon‐text.Finally,challengeswereidenti ied,andpotential avenuesforfutureresearchwereoutlinedintherealm ofIoTapplicationsinsmartgrids.
AmalZouhri∗ –SidiMohammedBenAbdellah University,FacultyofSciencesDharelmahraz, LaboratoryofElectronics,Signals,Systems andComputerScience,Fez,Morocco,e‐mail: amal.zouhri@usmba.ac.ma.
IsmailBoumhidi –SidiMohammedBenAbdellah University,FacultyofSciencesDharelmahraz, LaboratoryofElectronics,Signals,Systems andComputerScience,Fez,Morocco,e‐mail: ismail.boumhidi@usmba.ac.ma.
IsmailBoumhidi –SidiMohammedBenAbdellah University,FacultyofSciencesDharelmahraz, LaboratoryofElectronics,Signals,Systems andComputerScience,Fez,Morocco,e‐mail: ismail.boumhidi@usmba.ac.ma.
AbderahamaneEz-Zahout –MohammedVUniver‐sityAdjunctProfessoratSSESchoolofScienceand Engineering,AlAkhawaynUniversity,Ifrane,Morocco, e‐mail:a.ezzahout@um5r.ac.ma.
SaidChakouk –FacultyofLettersandHumanSci‐ences,MohammedVUniversityinRabat,Morocco, e‐mail:s.chakouk@um5r.ac.ma.
MostafaElMallahi –SidiMohammedbenAbdellah University,EcoleNormaleSup rieure,Fez,Morocco, e‐mail:mostafa.elmallahi@usmba.ac.ma.
∗Correspondingauthor
References
[1] Y.Li,L.Wu,H.Jia,&Z.Chen. “SmartGrid:Archi‐tecture,KeyTechnologies,andResearchAreas.” IEEEAccess,vol.6,54407–54422,2018.
[2] A.H.Gandomi,&A.R.Kashani.“ANewEvo‐lutionarySolutionforShort‐termSchedulingof SmartGridsIntegratedwithRenewableEnergy Resources.” EnergyConversionandManagement, vol.89,379–393,2015.
[3] M.Zaharieva&S.Rohjans.“MachineLearning forPredictiveMaintenanceofRenewableEnergy SystemsinSmartGrids.” Energies,vol.12,no.24, 4651,2019.
[4] A.Zahedi.“MachineLearningApplicationsIn SmartGrids:AReview.” Energies,12(7),1242, 2019.
[5] N.Khan,N.Pathak,andN.Roy,“DetectingCom‐monInsulationProblemsInBuiltEnvironments UsingThermalImages,”in Proc.IEEEInt.Conf. SmartComput. (SMARTCOMP),Washington,DC, USA,Jun.2019,pp.454–458,doi:10.1109/SM ARTCOMP.2019.00087.
[6] M.Sophocleous,P.Savva,M.F.Petrou,J.K.Atkin‐son,andJ.Georgiou,“ADurable,Screen‐Printed SensorForInSituAndReal‐TimeMonitoring OfConcrete’sElectricalResistivitySuitableFor SmartBuildings/CitiesAndIot,” IEEESensors
Lett.,vol.2,no.4,pp.1–4,Dec.2018,doi:10.1 109/LSENS.2018.2871517.
[7] A.Kumar,A.Kumar,andA.Singh,“EnergyEf i‐cientAndLowCostAirQualitySensorForSmart Buildings,”in Proc.3rdInt.Conf.Comput.Intell. Commun.Technol. (CICT),Ghaziabad,India,Feb. 2017,pp.1–4,doi:10.1109/CIACT.2017.79773 10.
[8] N.Haidar,N.Tamani,F.Nienaber,M.T.Wessel‐ing,A.Bouju,andY.Ghamri‐Doudane,“DataCol‐lectionPeriodAndSensorSelectionMethodFor SmartBuildingOccupancyPrediction,”in Proc. IEEE89thVeh.Technol.Conf.(VTC‐Spring),Kuala Lumpur,Malaysia,Apr.2019,pp.1–6,doi:10.1 109/VTCSpring.2019.8746447.
[9] S.Antonov,“SmartSolutionForFireSafetyIn ALargeGarage,”in Proc.Int.Conf.CreativeBus. SmartSustain.Growth (CREBUS),Sandanski,Bul‐garia,Mar.2019,pp.1–4,doi:10.1109/CREBUS .2019.8840089.
[10] G.Cavalera,R.C.Rosito,V.Lacasa,M.Mongiello, F.Nocera,L.Patrono,andI.Sergi,“AnInnovative SmartSystemBasedOnIotTechnologiesForFire AndDangerSituations,”in Proc.4thInt.Conf. SmartSustain.Technol.(SpliTech),Split,Croatia, Jun.2019,pp.1–6,doi:10.23919/SpliTech.2019 .8783059.
[11] P.G.JeyasheeliandJ.V.J.Selva,“AnIOTDesign ForSmartLightingInGreenBuildingsBasedOn EnvironmentalFactors,”in Proc.4thInt.Conf. Adv.Comput.Commun.Syst. (ICACCS),Coimbat‐ore,India,Jan.2017,pp.1–5,doi:10.1109/ICAC CS.2017.8014559.
[12] A.Pandharipande,M.Zhao,andE.Frimout,“Con‐nectedIndoorLightingBasedApplicationsIn ABuildingIotEcosystem,” IEEEInternetThings Mag.,vol.2,no.1,pp.22–26,Mar.2019,doi: 10.1109/IOTM.2019.1900016.
[13] A.Zakharov,A.Romazanov,A.Shirokikh,and I.Zakharova,“IntellectualDataAnalysisSystem OfBuildingTemperatureModeMonitoring,”in Proc.Int.RussianAutom.Conf. (RusAutoCon), Sochi,Russia,Sep.2019,pp.1–6,doi:10.1109/ RUSAUTOCON.2019.8867611.
[14] N.M.Elsayed,R.A.Swief,S.O.Abdellatif,and T.S.Abdel‐Salam,“PhotovoltaicApplicationsFor LightingLoadEnergySaving:CaseStudies,Edu‐cationalBuilding,”in Proc.Int.Conf.Innov.Trends Comput.Eng. (ITCE),Aswan,Egypt,Feb.2019, pp.564–569,doi:10.1109/ITCE.2019.8646485.
[15] P.D.Leo,F.Spertino,S.Fichera,G.Malgaroli, andA.Ratclif,“ImprovementOfSelf‐Suf iciency ForAnInnovativeNearlyZeroEnergyBuilding ByPhotovoltaicGenerators,”in Proc.IEEEMilan PowerTech, Milan,Italy,Jun.2019,pp.1–6,doi: 10.1109/PTC.2019.8810434.
[16] K.R.BabuandC.Vyjayanthi,“Implementation OfNetZeroEnergyBuilding(NZEB)Prototype
WithRenewableEnergyIntegration,”in Proc. IEEERegion10Symp. (TENSYMP),Kochi,India, Jul.2017,pp.1–5,doi:10.1109/TENCONSpring .2017.8069994.
[17] I.Ilhan,M.Karakose,andM.Yavas,“DesignAnd SimulationOfIntelligentCentralHeatingSystem ForSmartBuildingsInSmartCity,”in Proc.7th Int.IstanbulSmartGridsCitiesCongr.Fair (ICSG), stanbul,Turkey,Apr.2019,pp.233–237,doi:10 .1109/SGCF.2019.8782356.
[18] T.SonnekalbandS.Lucia,“SmartHotWater ControlWithLearnedHumanBehaviorForMin‐imalEnergyConsumption,”in Proc.IEEE5th WorldForumInternetThings(WF-IoT), Limerick, RepublicofIreland,Apr.2019,pp.572–577,doi: 10.1109/WF‐IoT.2019.8767171.
[19] D.Alulema,M.Zapata,andM.A.Zapata,“AnIot‐BasedRemoteMonitoringSystemForElectri‐calPowerConsumptionViaWeb‐Application,”in Proc.Int.Conf.Inf.Syst.Comput.Sci. (INCISCOS), Quito,Ecuador,Nov.2018,pp.193–197,doi:10 .1109/INCISCOS.2018.00035.
[20] A.M.Ali,S.A.A.Shukor,N.A.Rahim,Z.M.Razlan, Z.A.Z.Jamal,andK.Kohlhof,“Iot‐BasedSmart AirConditioningControlForThermalComfort,” in Proc.IEEEInt.Conf.Autom.ControlIntell. Syst. (I2CACIS),Selangor,Malaysia,Jun.2019,pp. 289–294,doi:10.1109/I2CACIS.2019.8825079.
[21] G.AlsuhliandA.Khattab,“AFog‐BasedIotPlat‐formForSmartBuildings,”in Proc.Int.Conf. Innov.TrendsComput.Eng. (ITCE),Aswan,Egypt, Feb.2019,pp.174–179,doi:10.1109/ITCE.201 9.8646480.
[22] X.Zhang,M.Pipattanasomporn,T.Chen,andS. Rahman,“AnIotbasedThermalModelLearning FrameworkForSmartBuildings,” IEEEInternet ThingsJ.,vol.7,no.1,pp.518–527,Jan.2020,doi: 10.1109/JIOT.2019.2951106.
[23] J.Aguilar,A.Garces‐Jimenez,N.Gallego‐Salvador, J.A.G.DeMesa,J.M.Gomez‐Pulido,andA.J. Garcia‐Tejedor,“AutonomicManagementArchi‐tectureForMulti‐HVACSystemsInSmartBuild‐ings,”IEEEAccess,vol.7,pp.123402–123415, 2019,doi:10.1109/ACCESS.2019.2937639.
[24] S.Rastegarpour,M.Ghaemi,andL.Ferrarini,“A PredictiveControlStrategyForEnergyManage‐mentInBuildingsWithRadiantFloorsAndTher‐malStorage,”in Proc.SICEInt.Symp.ControlSyst. (SICEISCS),Tokyo,Japan,Mar.2018,pp.67–73, doi:10.23919/SICEISCS.2018.8330158.
[25] A.Gillespie,T.F.Xulu,S.I.NoubissieTientcheu, andS.DanielChowdhury,“BuildingDesignCon‐siderationsForAnEnergyEf icientHVACSys‐tem,”in Proc.IEEEPES/IASPowerAfrica, Cape Town,SouthAfrica,Jun.2018,pp.1–6,doi:10.1 109/PowerAfrica.2018.8520995.
[26] B.Seng,C.Magniont,S.Spagnol,andS. Lorente,“EvaluationOfHempConcrete
ThermalProperties,”in Proc.Int.IEEEConf. UbiquitousIntell.Comput.,Adv.TrustedComput., ScalableComput.Commun.,CloudBigData Comput.,InternetPeople,SmartWorldCongr. (UIC/ATC/ScalCom/CBDCom/IoP/SmartWorld), Toulouse,France,Jul.2016,pp.984–989,doi: 10.1109/UIC‐ATC‐ScalComCBDCom‐IoP‐SmartWorld.2016.0154.
[27] R.Jarvis&P.Moses,“SmartGridCongestion CausedbyPlug‐inElectricVehicleCharging.”In Proceedingsofthe2019IEEETexasPowerand EnergyConference (TPEC),CollegeStation,TX, USA,7–8February2019;pp.1–5.[CrossRef]
[28] S.Ra iei&A.Bakhshai,“AReviewOnEnergyEf i‐ciencyOptimizationInSmartGrid.”In Proceedingsof38thAnnualConferenceonIEEEIndustrial ElectronicsSociety,Montreal,QC,Canada,25–28 October2012;pp.5916–5919.[CrossRef]
[29] P.Akaber,B.Moussa,M.Debbabi,C.Assi,“Auto‐matedPost‐FailureServiceRestorationinSmart GridthroughNetworkRecon igurationinthe PresenceofEnergyStorageSystems.” IEEESyst. J. 2019,pp.1–10.[CrossRef]
[30] F.Qi,P.Yu,B.Chen,W.Li,Q.Zhang,D.Jin, G.Zhang,Y.Wang,“OptimalPlanningofSmart GridCommunicationNetworkforInterregional Wide‐AreaMonitoringProtectionandControl System”.In Proceedingsofthe2018IEEEInternationalConferenceonEnergyInternet (ICEI), Beijing,China,21–25May2018;pp.190–195. [CrossRef]
[31] A.Ghasempour,“OptimumPacketServiceand ArrivalRatesinAdvancedMeteringInfrastruc‐tureArchitectureofSmartGrid.”In Proceedings ofthe2016IEEEGreenTechnologiesConference (IEEEGreenTech2016),KansasCity,MO,USA,6–8April2016;pp.1–5.[CrossRef]
[32] A.Ghasempour,J.H.Gunther,“Findingthe OptimalNumberofAggregatorsinMachine‐to‐MachineAdvancedMeteringInfrastructure
ArchitectureofSmartGridbasedonCost,Delay, andEnergyConsumption.”In Proceedingsof the201613thIEEEAnnualConsumerCommunications&NetworkingConference (IEEECCNC 2016),LasVegas,NV,USA,9–12January2016; pp.960–963.[CrossRef]
[33] A.Ghasempour,“OptimizedScalableDecentral‐izedHybridAdvancedMeteringInfrastructure forSmartGrid.”In Proceedingsofthe2015IEEE InternationalConferenceonSmartGridCommunications (IEEESmartGridComm2015),Miami, FL,USA,2–5November2015;pp.223–228. [CrossRef]
[34] A.I.Sarwat,A.Sundararajan,I.Parvez, Trends andFutureDirectionsofResearchforSmartGrid IoTSensorNetworks.InProceedingsofInternationalSymposiumonSensorNetworks,SystemsandSecurity,AdvancesinComputingand NetworkingwithApplications, 1sted.;Rao,N., Brooks,R.,Wu,C.,Eds.;Springer:NewYork,NY, USA,2018;pp.45–61.
[35] C.Wang,X.Li,Y.Liu,H.Wang,“TheResearch OnDevelopmentDirectionAndPointsInIotIn ChinaPowerGrid.”In Proceedingsofthe2014 InternationalConferenceonInformationScience, ElectronicsandElectricalEngineering,Sapporo City,Hokkaido,Japan,26–28April2014;pp. 245–248.[CrossRef]
[36] X.Chen,L.Sun,H.Zhu,Y.Zhen,H.Chen,“Appli‐cationofInternetofThingsinPower‐LineMon‐itoring.”In Proceedingsofthe2012International ConferenceonCyber-EnabledDistributedComputingandKnowledgeDiscovery,Sanya,China, 10–12October2012;pp.423–426.[CrossRef]
[37] A.Ghasempour,“InternetOfThingsInSmart Grid:Architecture,Applications,Services,Key Technologies,AndChallenges.” Inventions.2019; 4(1):22.doi:10.3390/inventions4010022
Abstract:
ENHANCINGEFFICIENCYANDSECURITYINHEALTHCAREIOT:ANOVELAPPROACH FORFOGCOMPUTINGRESOURCEOPTIMIZATIONUSINGTGA‐RNN
ENHANCINGEFFICIENCYANDSECURITYINHEALTHCAREIOT:ANOVELAPPROACH
ENHANCINGEFFICIENCYANDSECURITYINHEALTHCAREIOT:ANOVELAPPROACH FORFOGCOMPUTINGRESOURCEOPTIMIZATIONUSINGTGA‐RNN
Submitted:21st May2024;accepted:23rd July2024
RahulJaywantraoShimpi,VibhaTiwari
DOI:10.14313/jamris‐2025‐037
Fogcomputing,anewcomputingparadigmthathas gainedpopularity,bringscalculationsclosertodata sourcesfromhealthcarefacilities.Thehealthcareindus‐tryisthedrivingforcebehindthegrowthofInternetof Things(IoT)‐drivenFogcomputing,whichimprovesnet‐workperformanceandefficiency,particularlyinthesafe andeffectiveaggregationandtransmissionofhealthcare data.Thisrequiresoptimizingresourceallocationand addressingoverflowissues.Thisstudyintroducesanovel approachthatcombinesTaskGroupAggregation(TGA) withaRecurrentNeuralNetwork(RNN)toassessQuality ofService(QoS)characteristicsanddetectoverloaded servers.TheTGAmethodisutilizedtoeffectivelyman‐agedatamovementtoVirtualMachines(VMs),thereby alleviatingcongestionandimprovingsystemstability. Furthermore,itutilizestheChaoticFruitFlyOptimiza‐tionAlgorithm(CFOA),aneuralcomputingsystem,to optimizeserviceanduserseparationbasedonindividual characteristicsinthecontextofsecurehealthcaredata aggregationandtransmissionwithinIoTnetworks.The integrationofTGAwithCFFenhancesthedetectionof overflowproblemswithintheRNNframework,enabling proactivemanagementofresourceallocation.Thepro‐posedworkisevaluatedbyusingtheJavaprogramming language,andtheresultsdemonstratetheeffectiveness oftheFogcomputingoverflowcontrolmodelinmiti‐gatingcongestionandoptimizingresourcescheduling, therebyfacilitatingtheefficientandsecureaggregation andtransmissionofhealthcaredatawithinIoTnetworks.
Keywords: FogComputing,InternetofThings,Task GroupAggregation,RecurrentNeuralNetwork,Chaotic FruitFlyOptimizationAlgorithm.
TheemergenceofIoTtechnologiesisattributedto theincreasingnumberofuserdevicesandtheexpan‐sionofdistributedprocessingcapabilities[1].TheIoT isacontemporarytechnologythathasbroadappli‐cationsacrossmanyindustries,includinghealthcare [2].Theentirehealthcareindustry’sadoptionofthis technologyholdspromise,asitenableshospitalsto operatemoreef icientlyandprovidespatientswith accesstobettercare[3,4].Whileotherfeaturesare stillcrucialforthehealthcareindustry,remotepatient monitoringisoneofthemainapplicationsofHealth‐careIoT(HIoT)thatpreservesmoneyandmillions
oflives.Toprotectpatientprivacy,provideeffective treatment,andensurepatientsafetyandcon iden‐tiality,safeguardsforHIoTsystemsarecritical[5, 6].Healthcareisundergoingadigitaltransformation becauseofCloudIoTandtheabilityofCloudComput‐ing(CC)toaccessdatafromanywhereatanytime,and datainIoTisalsoexpandingatanexponentialrate[7, 8].Thecloudwillfacetremendouscomputingdemand ifallthistraf icistransferredthere[9].Fogcomputing hasthereforeemergedtodothreethings:(i)utilize theidleresourcesofIoTdevices;(ii)decreasenetwork lowincloudcenters,and(iii)shortenjobdelays.Fog networkshavebeenusedextensivelythusfarinareas suchasindustrialautomation,smartcities,smart buildings,andtheInternetofcars[10–12].Thus,inte‐gratingdeepneuralnetworkswithIoTdevicesresults inanewgenerationofappsthatareabletosup‐portawholenewlevelofinteractionbetweenpeople andtheirphysicalenvironmentthroughsophisticated sensingandunderstandingactivities[13,14].Onepar‐ticularkindofneuralnetworkthatisusefulforpro‐cessingsequentialdataistheRNN,whichimproves theunderstandingandrepresentationofinputdata bycapturingcontextualinformation[15].Usingpast dataandlearningpatterns,theRNNmethodcalcu‐latestheQoSforallservicesdependingonseveral traf icloads,networktopology,andconnecteddevices [16].Incloud‐fogcomputingframeworks,anarti icial ecosystem‐basedoptimizationiscreatedasanalter‐nativejobschedulingmodeltoenhancetheQoSfor IoT.Ithasdemonstrateditselftobethemostsuc‐cessfulandeffectivetechniqueforsolvingcloud‐fog TSoptimizationproblems,yieldingthebestresults.It needstobeexpandedtoaddressothergoalsrelevant tocloud‐fogenvironments,suchasenergyusageand inancialexpenditures,tofacilitatetheschedulingof IoTtasks[17,18].Amulti‐objectiveGrayWolfOpti‐mizationapproachispresentedin[19]forthebet‐termanagementofFogcomputingservicescheduling andactivation.Theschedulingproblemistheprimary applicationofthismethod.Unfortunately,tofunction asabalancingagent,italsoneedstoemployadifferent algorithm.Speci ically,thisapproachisusedtoover‐seeandhandleactivations.Themulti‐objectiveopti‐mizationmethodMOCSA,relatedtothecuckoosearch meta‐heuristicalgorithm,wasexpandedtoaddress thecombinatorialoptimizationproblem.Whencom‐paredtootherstate‐of‐the‐artapproachesintermsof objectivefunctions,itexhibitsanoticeableadvantage
intermsofaveragetotalpowerusageandaverage overalllatency.Nestisapossiblesolutionandacru‐cialpartoftheCSAalgorithm.Theperformanceof themethodisgreatlyaffectedbyencodingonthe nest[20].AnenhancedHarrisHawksOptimization (HHO)algorithmforschedulingscienti icwork lows hasbeenpresented.Thisapproachislinkedtoadis‐creteopposition,knownasDO‐HHO.Itoutperforms state‐of‐the‐arteffortsinreducingof loadedjobson CC,lostdeadlines,andSLAviolations.TheDO‐HHO algorithmhastobeexpandeduponanditsef icacy assessedformoreschedulingdif iculties[21,22].
AWhaleOptimizedResourceAllocation(WORA) methodwasdevelopedin[23];itutilizeslessenergy andachievesbetterresultsintermsofmakespan andthetask’ssuccessfulcompletionratio.Itisneces‐sarytoconsidercertainmeasures,suchasthroughput anddelayrate,whenassessingthealgorithm’sper‐formance.Increasingatask’sprocessingspeedalso meansusingmoreenergy;therefore,lookforwaysto dojobsquicklywhileusingtheleastamountofenergy. Consequently,aLyapunovframework‐basedheuristic Particleswarmoptimizationalgorithmwaspresented (LPSO).Abalanceisstruckamongtheenergyused byIoTnodesforprocessing,transmissionenergy, andFognodecomputingenergy,ensuringthatjobs arecompletedwiththeleastamountofenergycon‐sumptionpossible,astasktimeandqueuestability areensured.Becauseitconsumeslessenergythan theothermethods,thenumberoftaskscompleted wassomewhatfewer[24].AmethodforLyapunov optimizationthatfunctionswithlimitedbufferswith‐outcompromisingasymptoticoptimalitywaspro‐posedin[25].Itachievesasymptoticallydecreased time‐averagecostandbooststhroughput.However, becauseofthesmallbuffersofreal‐worldIoTdevices, theproblemofinterestwasnotdirectlyaddressed byLyapunovoptimization.MultireplicasParetoant colonyoptimization(MRPACO),asolutionrelated toantcolonyoptimization,waspresentedin[26]. MRPACOworkedwellandappearstobedependable inreachingconvergenceandwidespreadsolutions. Notably,additionalpointsobtainedusingthebase‐lineapproachespredominateoverasmallnumberof pointsobtainedusingMRPACO.Toclusteroverhealth‐careIoTdatasets,aChaoticBiogeography‐BasedOpti‐mizationtechniqueemployingInformationEntropy (CBO‐IE)isused.TheBOtechniqueyieldseffective resultsfornumericaloptimizationandisideallysuited forexploringandexploitinglargesearchspaces.How‐ever,thedataclusteringtechniqueandnumerical optimizationdiffersomewhat[27].TheCascadedlong short‐termmemory(CSO‐CLSTM)method,whichis relatedtotheCrowSearchOptimizationalgorithm,is employedby[28]todiagnosediseases.Smarthealth‐caresystemsusetheCSO‐LSTMmodelasasuitable illnessdiagnosistool.Someoftheshortcomingsof theCSOincludeitshighlikelihoodofgettingstuckin localoptimaanditsslowsearchprecision.Therefore, itwassolvedbyoptimizingserviceandusersepara‐tionbasedonindividualfeatureswithinthecontext
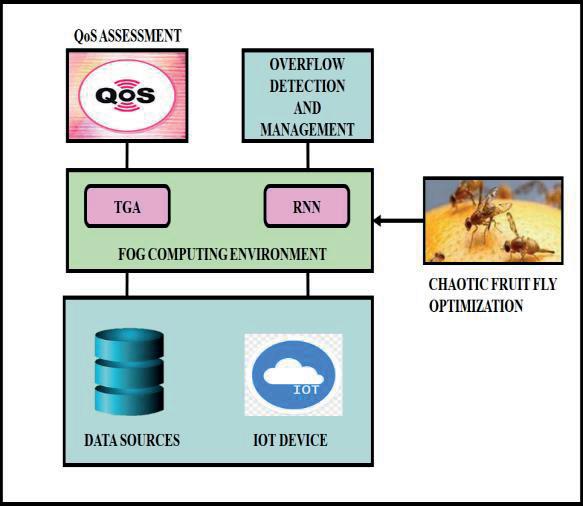
Figure1. Blockdiagramofproposedmethod
ofsafehealthcaredataaggregationandtransmission withinIoTnetworksusingtheCFOA,aneuralcomput‐ingsystem.Thispaperproposesauniquemethodto detectoverloadedserversandevaluateQoSfeatures bycombininganRNNwithTGA.Byef icientlymanag‐ingdatamigrationtoVMs,theTGAapproachreduces congestionandenhancessystemstability.Themain in luencesthatshapedthisinvestigationareasfol‐lows:
‐ BycombiningTGAandCFF,over lowissueswithin theRNNframeworkaredetectedmoreeffectively, allowingforproactiveresourceallocationmanage‐ment.
‐ Toevaluatethequalityofserviceattributesand identifyoverloadedservers,itcombinesTGAwith anRNN.
‐ Theef icacyoftheproposedover lowcontrol approachforFogcomputinginreducingcongestion andstreamliningresourcescheduling,whichmakes iteasiertoaggregateandtransmitmedicaldata securelyandeffectivelyoverIoTnetworks.
ThecombinationofIoThasproducedsigni icant insights,cost‐effectiveness,andproductivity,allof whichhavehadanimpactonqualityoflife.IoTis beingusedinhealthcaretoimprovepatientmonitor‐ing,reduceexpenditure,andpromoteinnovationin patientcare.Duetothelargevolumeofdatagathered, itwillbestoredinthecloudfortestinganddecision‐makingpurposes.TheprimarycauseofFogcomput‐ing’sriseistheCCscenario’shightime‐delayprob‐lem,whichpersistsdespiteitsnumerousadvantages. Fogcomputingisthereforeidealforapplicationsthat requirerapidorreal‐timeresponses,particularlyin thehealthcareindustry.
Theinputdataisobtainedfromadatasource andanIoTdeviceusedformonitoringpurposesin healthcare.Thefogcomputingenvironmentconsists ofTGAandRNNmethodsusedtoassessQoScharac‐teristicsanddetectoverloadedservers.Toef iciently managedatamigrationtoVMs,reducecongestion, andenhancesystemstability,theTGAapproachis
utilized.Furthermore,theCFOAisaneuralcomput‐ingsystemdesignedtomaximizeserviceanduser separationbasedonuniqueattributesinthecontext ofsafehealthcaredatatransferandaggregationover IoTnetworks.Theproactivecontrolofresourceallo‐cationmadepossiblebytheintegrationofTGAand CFFimprovesthedetectionofover lowissueswithin theRNNarchitecture.Theef iciencyoftheFogcom‐putingover lowmanagementmodelreducesconges‐tion.Itenhancesresourcescheduling,makingiteasier forhealthcaredatatobeaggregatedandtransmitted securelyandeffectivelyoverIoTnetworks.
Healthcareistheactofreceivingessentialmedical treatmenttoenhanceone’swell‐being.Issueswith traditionalIThealthcaresystemsincludeexpense, location,ongoingsurveillance,apps,administrative work,processinglags,andaccuracy.VariousITinfras‐tructureshavebeenusedtoimplementnumerous healthcareapplications.Fornon‐invasivehealthcare, thecurrentITandhealthcaresolutionsperform admirably.Medicaldevicesthatareinstalledonthe bodyandcontinuouslygeneratedatarelevanttoorgan healthareusedinnon‐invasiveapplications.The devicesemployvariousprocessingandinterpreta‐tiontechniquestocollectandanalyzethisdata,and thentakeappropriateactiontomaintainthepatient’s health.However,severalvitalhealthapplications, suchaselectrocardiography,electromyography,blood pressuremonitoring,glucoselevelsensing,oxygen sensing,rehabilitation,bloodtemperature,andmed‐ication,requireparametricinformation.ITsupport systemswillassistinmakinghealth‐relateddecisions basedonthedatathathasbeenrecorded.However, ifdecisionsonsuchvitalmedicalcarearepostponed inanyway,itleadstodisastrousoutcomes.QoSis affectedifhealthcaresystems,whenimplemented,are notrespondingpromptly.Thepurposeistoraisethe presentIT‐relatedhealthcareapplicationusingaQoS method.
Thecombinationofthewords“Internet”and “things”hasgreatlyadvancedthe ieldofICT.Thisisa paradigminwhicheverydeviceisinternet‐connected andhasitsownidentityandaddress.Itisaglobalnet‐workofinterconnecteddevicesusedtoreferto,pro‐cess,store,andtransmitenvironmentalinformation. Itappearsthatdistinctviewpointshaveconvergedas IoTisappliedinvariousindustries,withapplication scenariosincludinghealthcare,personalandsocial, smartenvironments,logistics,andtransportation.IoT inthehealthcareindustrycantrackitemsandpeople, recognizeandauthenticateindividuals,andgather dataspontaneouslybydetectingsurroundings.Addi‐tionally,IoTdevicescaninteractindiverseenviron‐mentsthroughvariouswiredandwirelessprotocols. AsCCprocessesenormousvolumesofdata,itresults insigni icantend‐to‐enddelaysandissueswithnet‐workutilization.IoT‐basedhealthcaresolutionscon‐tinuetofacechallengeswithsecurityandef iciency. Byofferingprocessingandstoragecapacitiesatthe
network’sedge,fogcomputingisdesignedtohandle theissuesassociatedwithCC.
2.2.FogComputinginHealthcare
Fogisadistributedcomputingenvironmentwhere applicationsanddataaredisseminatebetweenmul‐tipledatasourcesandthecloud.Adecentralized methodcalledfogcomputingprocessesdatanearer totheedgedevices.Fogcomputingalsohelpswith securitybecauseitdividesthebandwidth lowand providesmore irewallstoanetworkforaddedprotec‐tion.AllapplicationsarestillabletoutilizeCC,butfog computingwillsurelyreducecloudtraf ictoagreater extent.Furthermore,CCremainstheonlymethod availableforsavingandretrievinghistoricaldata.The amountanddiversityofstreamdatahaveincreasedto previouslyunheard‐oflevelsinrecentyearsbecause oftherapidgrowthofIoT.IoTisabroadandadaptable networkarchitecturethatlinksobjectswithunique identitiestoprovideamultitudeofinnovativeappli‐cationservices.EventhoughIoToffersimprovedser‐vices,itslimitedprocessingandstoragecapacitypre‐ventitfromhandlingandsavingthehugevolumeof data.ThenuisanceofIoTiseliminatedbyCCtechnol‐ogy,whichprovidesvirtualresourcesonapay‐as‐you‐gobasis.Itprovidescountlessprocessingandstorage capacityoptions.AlthoughnumerousCCresources, services,andappsareavailable,latencyissueshinder thecompleteutilizationofsomeoftheseresources. Duetotherapidincreaseininternet‐coupledsmart devicesandthevolumeofservicedemands,thenet‐workcapacityissigni icantlystressed,andtheQoS isdecreased.Implementinglow‐latencyappsishin‐deredbythelargenetworklatencybetweensmart devicesandthecloud.Themostpromisingapproach isfogcomputing,whichoffersCCbene itsandgreatly lowerslatencybyexpandingcloudservicestothenet‐workedge.Inadditiontofacilitatingthegeneration ofnewinformationandanalyzingdatafromstreams generatedbycleverIoTdevices,itoffersdispersed services.Thepurposesoffogcomputingareespecially well‐suitedtoapplicationsforextensivehealthmoni‐toring.TheIoTisessentialforconsistentlymonitor‐inghospitalizedpatients’physiologicalstateswith‐outrequiringactivecaregiverparticipation.Wireless BodyAreaNetworks(WBAN),themajorIoTtechnol‐ogyusedinhealthcare,primarilyrelyonapplications forhealthcaremonitoring.Electromyography,Electro‐cardiography,glucoselevelsensing,bloodpressure monitoring,oxygensensing,rehabilitation,bloodtem‐peraturemeasurement,andmedicationadministra‐tionareamongthephysiologicaldatathatWBAN assistsintheef icientandinconspicuouscollectionof. ThepriorresearchendeavourleveragesCCtechnol‐ogyforIoTdevicestoeffectivelyfacilitatetheperva‐siveapplicationsofhealthcare.
TheconventionalFogComputingmethods focusonvariousapplicationscenariostooffer multipleoptionsforreducingservicelatency.These approachesarestillintheirinfancy,though,asthey aimtoofferubiquitoushealthcarecomputingservices intherealworld.Toprovideasmartfoggateway
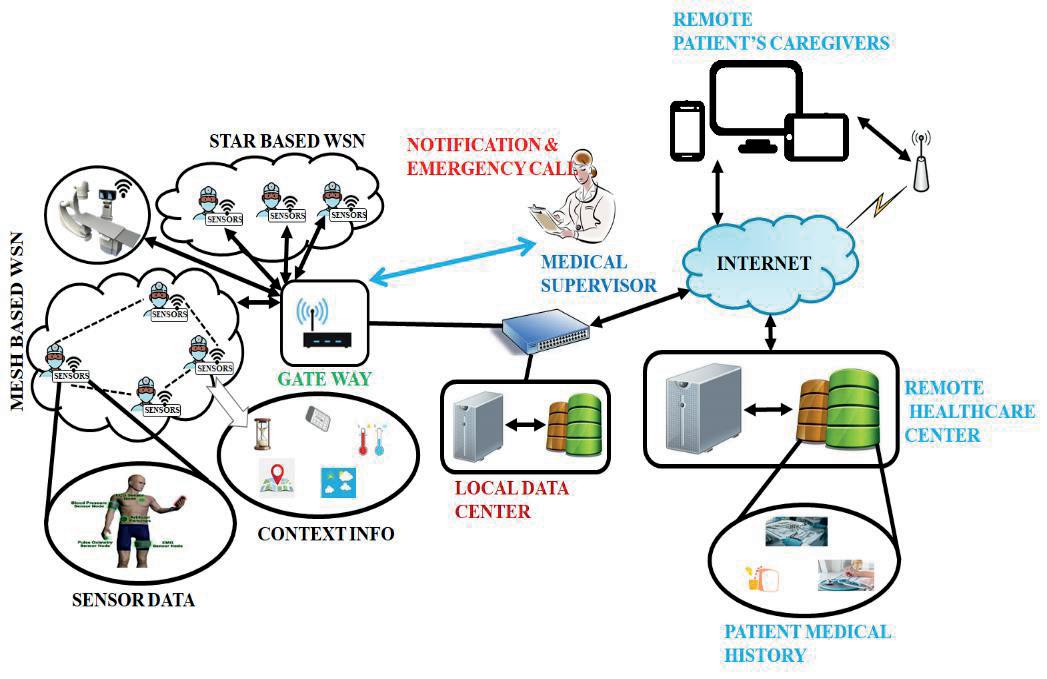
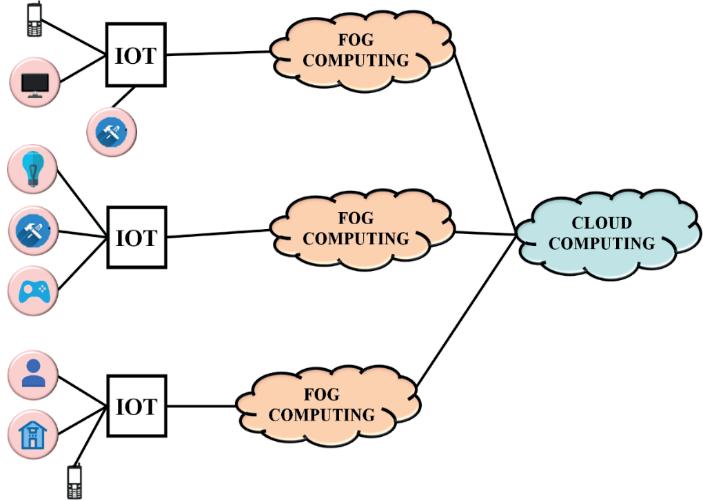
andmaximizecloudresourcesforHIoTinquiries, thisstrategyfocusesonofferingdecision‐making andsmartpartitioningusinglineardecisiontrees infogscenarios.Itstrivestoimproveresourceuse andreduceresponselatencywhiledeliveringthe servicetohealthcareapplications,asspeci iedby SLAs.ThebestlayeroftheIoTisCC,whichisa paradigmforhostingservicesonline.Fogcomputing resourcesarepositionedatthetopofthedevices. Thefundamentalrequirementsoffogcomputing iseffectiveresourcemanagement,whichsupports theprovisionofhigh‐qualityIoTservices.Inthis case,securityforIoTdevicesisinsteadprovided byaFognode,whichhandlesthesecryptographic operations.Fogprocessingandstoringoccurcloser tothedatasourceattheedgeofthenetwork,which
isimportantforreal‐timecontrol.Fogactsasabridge betweenadistantserverandcomputerhardware.It determineswhatdatawasprocessedlocallyandwhat willbeforwardedtotheserver.Fogfunctionsasan intelligentgatewaythateliminatesclouds,facilitating moreeffectivedataprocessing,analysis,andstorage. ThefogcomputingarchitectureisdepictedinFig. 3, whereIoTdevicesaresituatedinthebottomlayer, andFogcomputingexpandsthesystem’sef iciency andisalsousedtocon irmincreasedsecurity.For resourceoptimization,FogcomputingcombinesTGA withanRNNtoassessQoScharacteristicsanddetect overloadedservers.
2.3.TGAwithRNN
TheintegrationofTGAwithRNNevaluatesQoS characteristicsandidenti iesoverloadedservers.In ordertoef icientlymanagedatamigrationtoVMs, reducecongestion,andenhancesystemstability,the TGAapproachisemployed.Algorithm1depictsthe TGAalgorithm.
AtypeofdeeplearningtechniqueistheRNN, whichisusedtominimizethetraf ic lowinthenet‐work.LSTMnetworksareatypeofRNN,andthe threegatesofanLSTMnetworkaretheinput,forget, andoutputgates,whichenableittorecallpastdata andmakeitanexcellentchoiceforhandlingtime‐seriesdata.LSTMnetworksareexamplesofrecurrent neuralnetworks.Fig. 4 depictsthebaselinemodel architecture.Theinputlayer,thehiddenlayer(LSTM &hiddenlayer(Dense)andtheoutputlayermakeup thethreelayersoftheLSTMmodel.Thethreeneurons inthisworkarerepresentedbythevectors ��,�� and
Algorithm1:TGAAlgorithm ����������∶��→���������������������� ��→������������������������������ ������������∶����→������������������������������������������
����������
������������������=[����������������������]//��������������ℎ�������� (������������������ℎ������ℎ������������������) ������������ℎ������������
������������������������������������������������ℎ������������,����������������������������ℎ ������������ℎ��
������������=������������//�������������������������������������������� ��������=max([����������������������])//�������������������������������������������� ����������������=��������×������������//���������������������������������������������� ���������� (����������������)≤max?(������) ����������������������(��)=��������(��)/(1− ����������������(��)������������������������������(��)=(����������������������(��)×������������(��))/������������(��)) ����−��������=��������(��������������×��������) ������−���� ������−������
������������∶����−���������������������������������������������������������� ������−��������������ℎ��
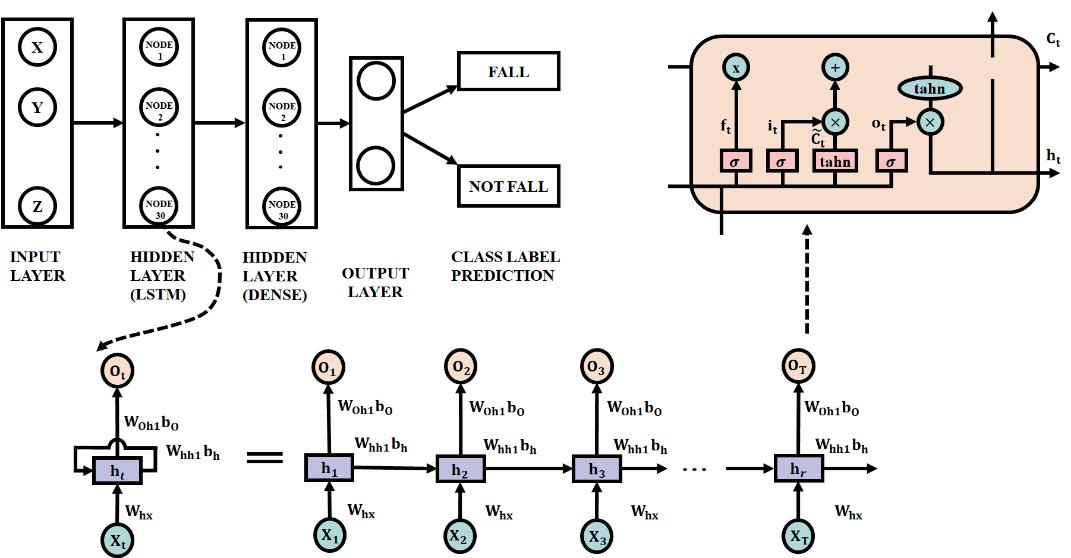
��.Theinputlayerinthisworkreceivestherawdata. Thisoutputlayeristransferredontothesucceeding hiddenlayers,whichconsistofthedenselayerwith 30neuronsandthe irstLSTMlayerwith30neurons. Lastly,the2‐nodeoutputlayercomputestheclass labelinprobabilitiesusingthesoftmaxfunction.Since theLSTMmodelistypicallytrainedusingthewell‐knownbackpropagationalgorithm,itsperformanceis greatlyin luencedbythenumberoftimesteps(n) utilizedduringmodeltraining.Forexample,themodel won’tbeabletocapturetheentirerangeoftheactiv‐ityifitwastrainedusingatinynumberofstepsin thepast.Conversely,ifthemethodistrainedwith
numeroustimesteps,alargeamountofirrelevantdata isconsidered.TheLSTMmodel’sindividualcellactiv‐itiesareexplainedbyequations(1)through(5).More precisely,vectorsandmatricesarerepresentedbythe followinginputvariables:����,ℎ��−1 and����−1.Theinput andrecurrentconnectionsaredenotedby���� and���� weights,respectively.Furthermore,thesematrices �� haveanindexthatcorrespondstotheforgetgate(f), inputgate(i),outputgate(o),ormemorycell(��).
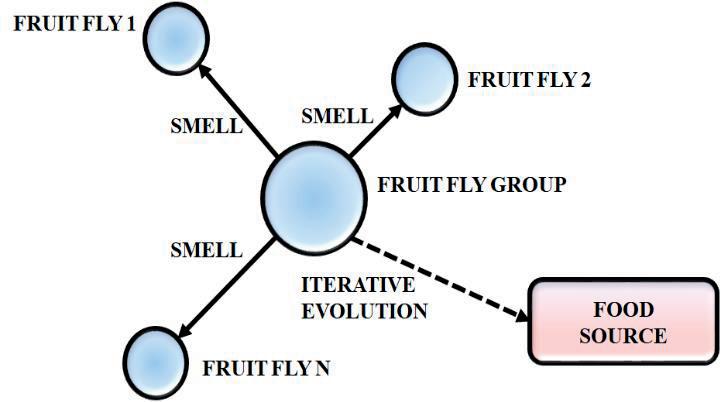
Inthiscase,���� =0andℎ�� =0arethebeginning values.TheoperatorreferstotheHadamardproduct, andthetimestepisrepresentedbytheindex��.More‐over,thefunctionsrepresentedbythevaluesof ����, ���� and��ℎ arethesigmoid,hyperbolic,andhyperbolic tangentfunctions.AlongwithTGAandRNN,theCFOA isutilizedtosolveissuesorenhanceexistingsolutions.
2.4.ChaoticFruitFlyOptimizationAlgorithmforOpti‐mizationPurposes
TheCFOAenhancestheFruitFlyOptimization Algorithm(FOA)byinterpolatingthenewparame‐terjoinedwithchaos,andithasanextremelyquick convergencerate.FOAwithaChaoticmapindicates ascendancyintermsofreliabilityofglobaloptimality andalgorithmsuccessrate.
1)BasicfruitflyoptimizationAlgorithm
FOAisanewmetaheuristicmethodinspiredbythe behavioroffruit lies,designedtosolveoptimization problemsand indglobaloptima.Thecharacteroffruit liesinthewildservedasthemodelforthefruit ly optimizationalgorithm.Whencomparedtoothersim‐ilarspecies,fruit liesaresuperior,particularlywhen itcomestoemployingtheirolfactoryandeyesight traitsto indfood.Anindividualislookingforanddis‐coveringfoodsourcesnearthefruit lyswarmduring thescentforagingphase.Thefragranceconcentration thatmatchesthe itnessvalueforeachfoodsource isnextassessed.Theswarmissteeredtowardsthe greatestsmellconcentrationvalueassignedduring thevisionforagingphase.Fig.5depictsthefruit ly’s foragingbehavior.
TherearesixdistinctstepsthatmakeupFOA, andtheyareasfollows:(i)establishthesizeofthe populationandthemaximumnumberofiterations; (ii)useEq.(6)torandomlyestablishthelocationof thefruit lyswarm;
population;
(iv)assessthetotalpopulationoffruit liestodeter‐minethesmellconcentrationvalueofeachindividual intheswarm;(v)identifythefruit lywiththehighest smellconcentrationandthenusethevisionsearch processtoguidetheswarmto indthisbestindivid‐ual;andlastly(vi)completethealgorithmifseveral generationsisarrived,orproceedtostep(iii)else.
Thefactors ����,�� and ���� affecttheolfactionand visionsearchstages,andareresponsibleforproduc‐ingfoodsources.The inalalgorithmanswerisdeter‐minedbythesigni icantwayinwhichtheyarecal‐culated.Severalstudieshavedemonstratedthatthe useofnon‐standarddistributions(suchastheGauss oruniformdistributions)improvestheperformance ofrandom‐basedoptimizationtechniques.Further‐more,theperiodicityandnon‐repetitionofchaoscan compelanalgorithmtorunitsoverallsearchesmore quickly.Thesearetheprimarydriversbehindthe creationofenhancedFOA,whicharediscussednext. However,thisapproachhasdrawbackssuchasapoor globaloptimizationcapabilityandproducespopula‐tionindividualsinanundulysimplisticmanner.An algorithmforCFOAisproposedtoaddressthisissue.
2)ChaoticfruitflyoptimizationAlgorithm
Thispartintroducesanewparameterboostedby chaostopresentanovelFOA.TheCFOAisexplained inthefollowingmanner.
2.1)AlgorithmInitialization
Theinitiallocationoftheswarmsigni icantlyin lu‐encedrapidconvergenceandtheultimateresult. CFOAselectstheoptimalrandomlygeneratedsolu‐tionfromPStodeterminetheinitialpositionofthe fruit lyswarmasthe irstimprovement.Whenthe experimentalrunisover,thecomputationoftheinitial swarmpositionproducesabetteralgorithmsolution andfasterconvergence.
2.2)ChaosFOA
Thechaosapproachisreferredasapracticalway tobalanceexplorationandexploitation,ensuringalgo‐rithmicperformancestability.Oneofthemostcru‐cialfactorsaffectingalgorithmperformanceinFOA isthecalculationoffoodsources.Thismetaheuristic technique’sbasicimplementationassumesuniform distributionrandomizationofthevariables ����,��.This isoftenapoordecision,particularlywhendealing withcomplex,multimodal,andnonlinearissues.An alphaisanewparameterintroducedandutilizedto generatefoodsourcestoincreasetheoverallspeed andconvergenceofFOA.Speci ically,changedEq.(7) toincludeachaoticvariableasbelow:
(iii)UtilizeEquation 7 torandomlyproduceseveral fruit liesnearthefruit lyswarminordertobuilda
Wheretheoptimalsolutionasofpresentis ��∗ Makepeoplemoveinadisorderlymannerinthedirec‐tionofthebestpossibleanswerthusfar.Whencom‐paredtoFOAwithLevydistributionandbasicFOA,
Algorithm2:ProcedureofChaoticFOA //��������������ℎ������������������������������
������
��������=1,…,���� ����,�� =���������� ����������+(���������� ����������−���������� ����������)×��������(),��=1,…,��
△←������(min��=1,2,…,���� ��(����))//�������������������������������� //�������������������������������������������������������������������������� ��∗ =△ ��������=0 ������������ //����������−����������(������ℎ����������)������������������ℎ������ ��������=1,….,���� //���������������������������������������� =(����,1,����,2,…,����,��)
��,�� +������ℎ��(����,�� ‐��∗ ��),��=1,…,����,��=1,…,�� //������������ℎ�������������� ��������,�� >���������� ������������ℎ���� ����,�� =���������� ���������� ����������
�������� =������ min��=1,2,…,����(��(����))
thisturnedouttobeasigni icantadvantage.Algo‐rithm2presentsthefullprocessofanovelCFOA.
3.ResultsandDiscussion
Toreducecongestionandimproveresource scheduling,thisresearchimpliesthefogcomputing over lowcontrolmodel.Thiswillenablethesafeand effectivecollectionandtransferofmedicaldataacross IoTnetworks.BycombiningTGAandCFF,over low issuesintheRNNframeworkcanbedetectedmore effectively,enablingproactiveresourceallocation management.Additionally,theJavaprogramming languageisusedtoobtaintheresultsoftheassociated techniques.Javaclient‐serverinfogcomputingis createdatvariouslayersofthefogarchitecture, includingfognodes,fogservers,gatewaydevices, cloudservices,andmanagement/orchestration systems,toenableef icientandscalableedge computingsolutions.
Table1displaysthesimulationparametersofthe method.FOAwithChaoticmapshowssuperiority intermsofresourceschedulingef iciency,response time,energyconsumption,andalgorithmsuccessrate.
Table1. Simulationparameters
Simulationparameters Value RadiusoftheFN 100��
Datasizefortask [0.1−1]����������
Computationcapacityof theFN [0.7−1]������
Computationcapacityof theIoTdevices 20������
Localcomputingenergy consumption [2−4]∗10−11 ��/����������
FNcomputingenergy consumption 1∗10−11 ��/����������
Figure6illustratesthemonitoredhealthcaredata, includingtemperatureandbloodpressurevalues. Here,theIoTisusedtomonitortheparametersof thehumanbody,andoneofthesampleoutputsis providedabove.
Accordingtouserrequestsvaryingfrom5to100, asseeninFig.7,theproposedmethodhasanaverage successrate.Theaveragesuccessratedropsasthe numberofrequestsfromtheuserincreases.However, theCFOAhasabettersuccessratethanothermethods.
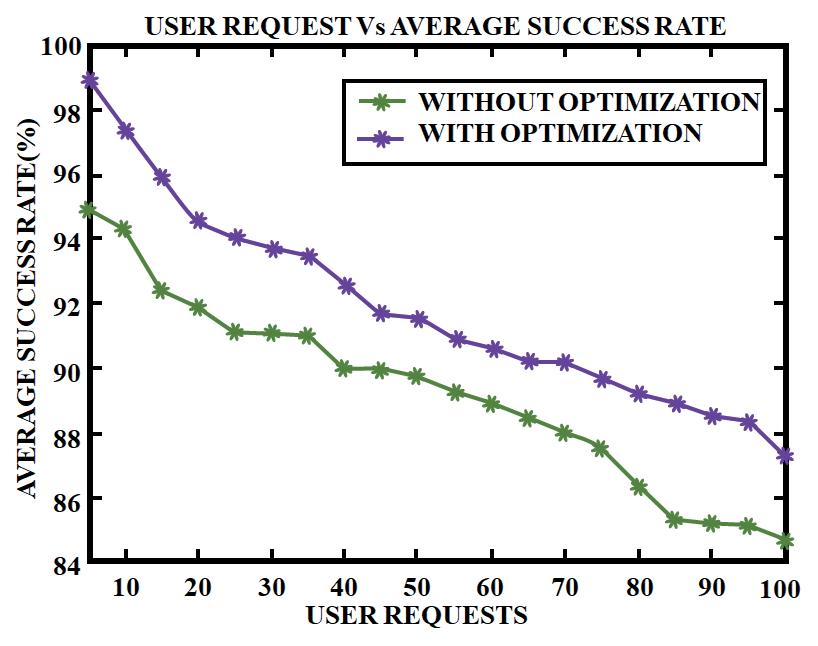
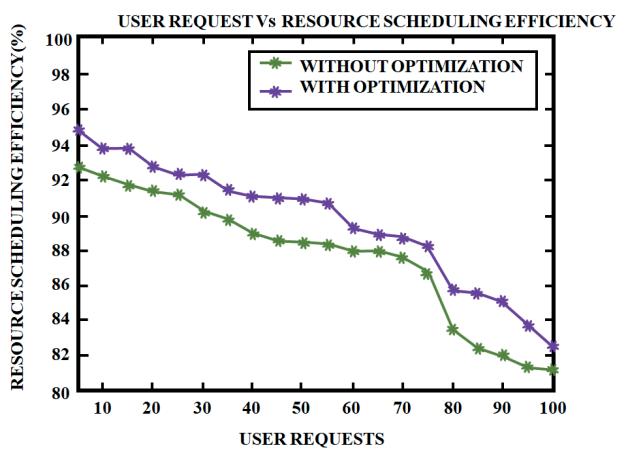
Theef iciencyofresourceschedulingforuser requestsisshowninFig. 8,whichconsidersarange ofcustomerdemandsfrom5to100.The indings showthatasthenumberofrequestsincreases,the effectivenessofresourceschedulingvariesbetween 80%and96%.AlthoughtheCFOAhasbetterresource schedulingef iciencythanothermethods.
Afteraccountingforuserdemands,Fig. 9 illus‐trateshowenergyconsumptionvariesfrom1to 100users.Itwasfoundthatascustomerdemand increases,sodoesenergyusage.However,theCFOA utilizeslowerenergythanothermethods.
Fig.10illustrateshowtorespondtouserrequests withinasuitabletimeframe,accommodatingqueries
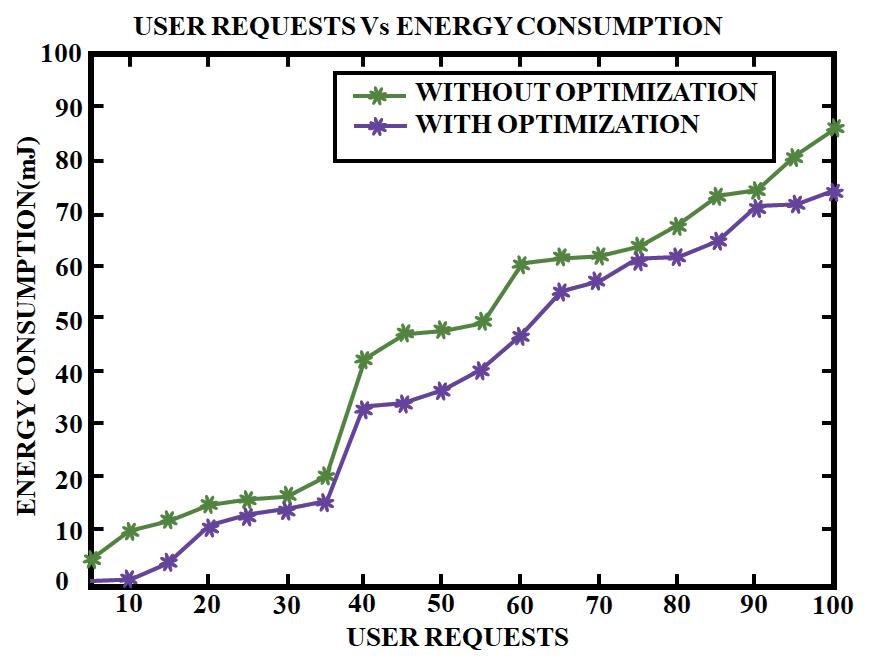
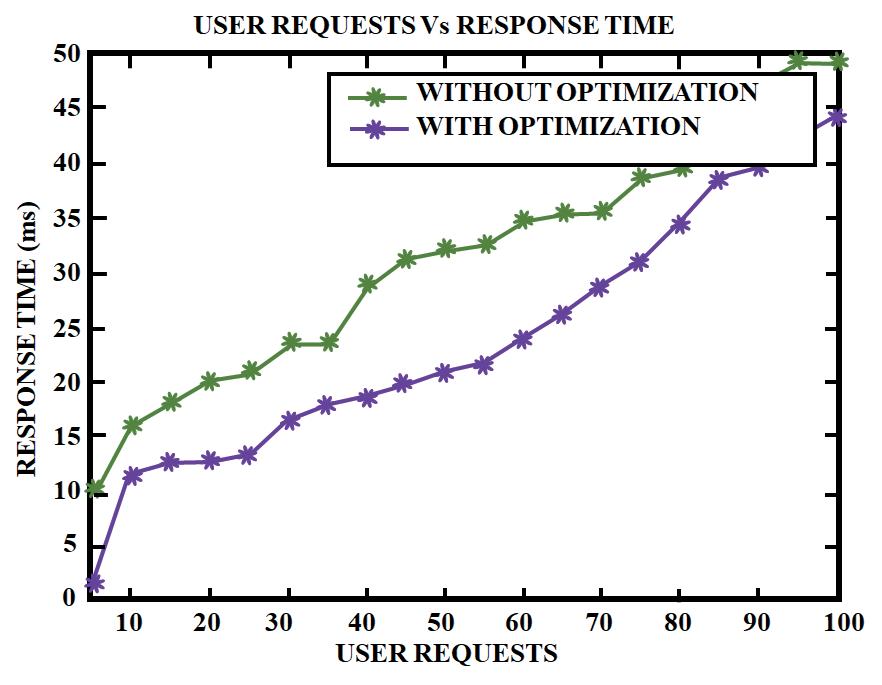
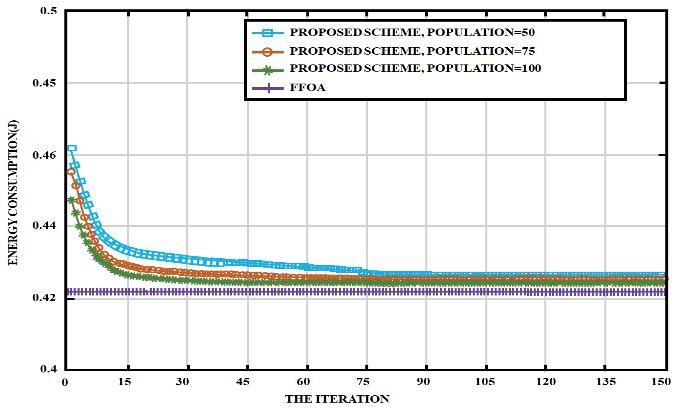
from5to100users.Theobservationshaveled toimprovementsinresponsetimes,aswellasan increaseinuserrequests.However,theCFOAhasa lowerresponsetimethanothermethods.
TheenergyusageoftheproposedCFOAincom‐parisontotheiterationsforvariouspopulationsis showninFig. 11.Theenergyconsumptionratefor populationsof ifty,seventy‐ ive,andonehundredis
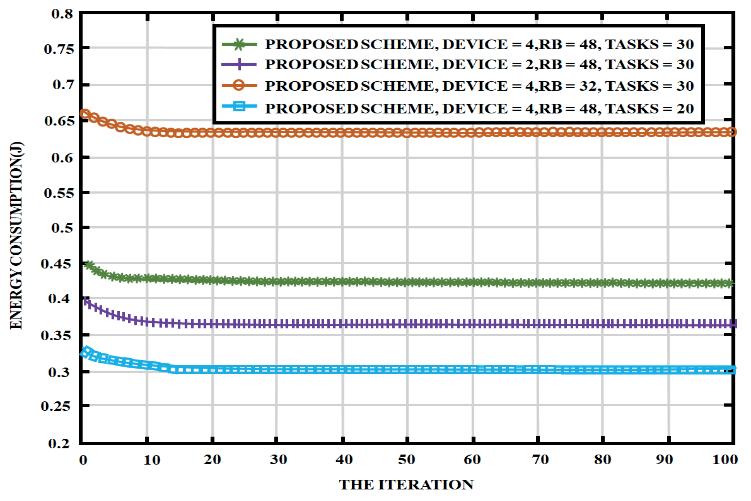
Figure12. Convergenceperformancewith devices/tasks/RBs
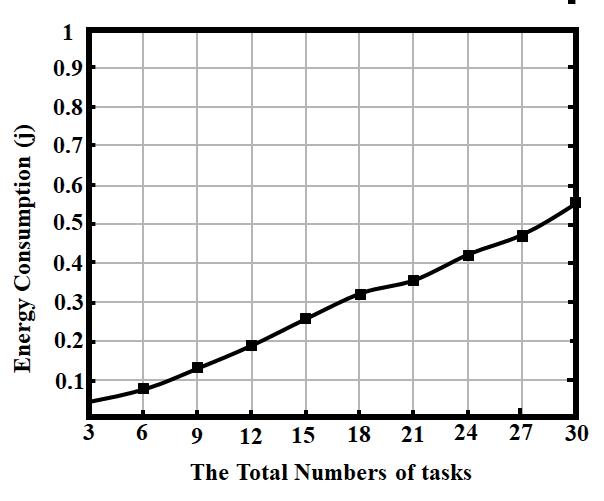
Figure13. EnergyconsumptionVsthenumberoftasks
provided.Furthermore,theFFOAobtainsthehighly complexoptimalsolution.However,theCFOAhasa low‐complexity,suboptimalsolution.
Theeffectoftasks,RBs,anddevicecounton convergenceperformanceisillustratedinFig. 12 Anincreaseindevicecountsigni ieshigherenergy consumptionforconvergence,whiletheimpactof RBsandtasksremainssimilar.Inthesamevein,as tasksincreaseanddevicesandRBsbecomeidentical, sodoestheenergyrequiredforconvergence.More RBstranslateintomoretransmissionresourcesfor of loading,whichimprovesconvergenceperformance evenwhenthedevicesandtasksarethesame.
Theenergyconsumptioncomparedtothetotal tasknumberishighlightedinFig.13.Asthetasknum‐berrises,sodoestheenergyconsumption.Itleverages theFN’spowerfulprocessingandstoragecapabilities toreduceenergyconsumption.
TheenergyconsumptionoftheFNinrelationto itscomputingcapacityisshowninFig. 14.Because thedutiesaredynamicallyassignedtotheFNandIoT devicesbasedonavailableresources,theproposed approachusestheleastamountofenergy.
Theenergyconsumptionversusthetotalnum‐berofRBsisdisplayedinFig. 15.Asthenumber ofRBsincreases,theenergyconsumptiondecreases moregradually.Additionally,theproposedstrategy
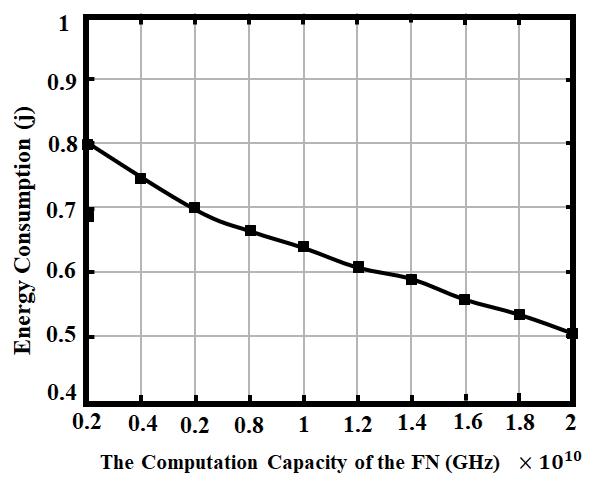
Figure14. EnergyconsumptionversustheFN’s computationcapacity
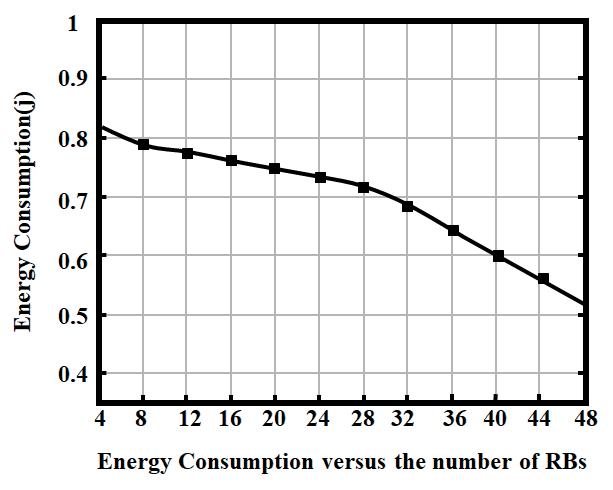
Figure15. Energyconsumptionversusthenumberof RBs
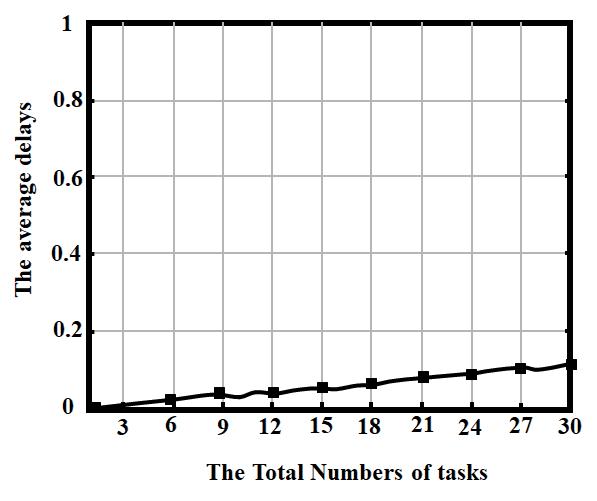
Figure16. AveragedelayVsthenumberoftasks allocatesjobstotheFNandachievesthelowest energyconsumptionasthenumberofRBsissteadily increased.
Theaveragelatencyvsthetotalno.oftasksis displayedinFig.16.Itisevidentthatasthenumberof tasksgrows,sodoestheaveragedelay.IoTdevicesdid notprocessjobswithagreaternumberofvariablesin ashorttime.Itcausesasubstantialdelayandsubpar performance.Moreover,theproposedmodelattainsa reducedlatency.
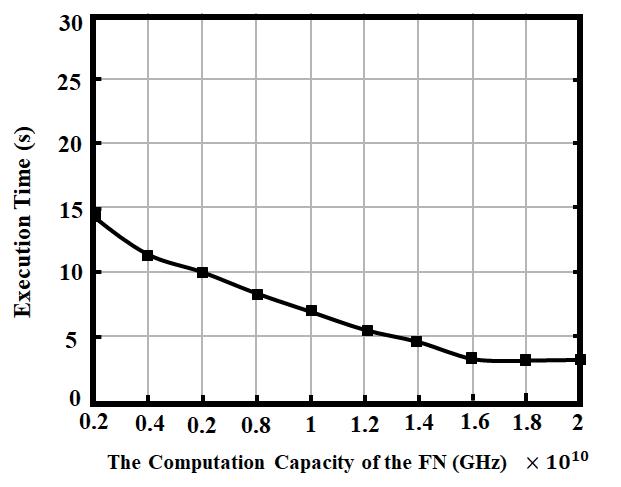
Figure17. AveragedelayVstheFN’scomputation capacity
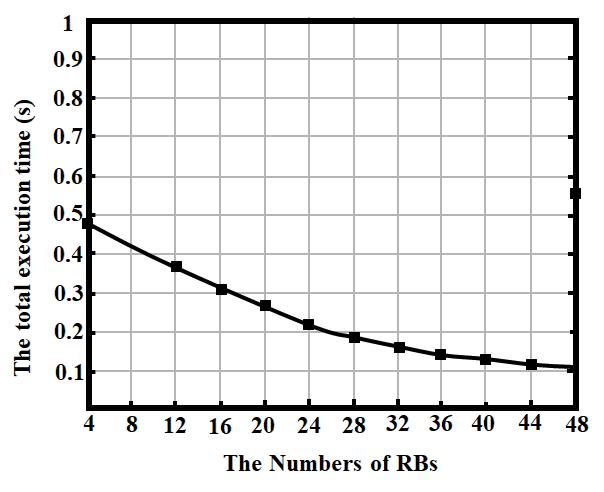
Figure18. AveragedelayVsthenumberofRBs
Table2. ComparisonofExecutionTime
TheproposedapproachevaluatesQoSattributes andidenti iesoverloadedserversbyfusingTGA andanRNN.Byef icientlymanagingdatamigration toVMs,theTGAapproachreducescongestionand enhancessystemstability.Furthermore,inthecon‐textofsafehealthcaredataaggregationandtrans‐missioninsideIoTnetworks,theCFOAisaneu‐ralcomputingsystemtomaximizeserviceanduser separationbasedonindividualfeatures.Bycom‐biningTGAandCFOA,over lowissuesintheRNN frameworkcanbedetectedmoreeffectively,allowing forproactiveresourceallocationmanagement.The resultsareobtainedbyutilizingtheJavaprogramming language,andthismethodachievesanoptimalsolu‐tionwithlowcomplexity,improvedconvergenceper‐formance,enhancedresourceschedulingef iciency, reducedenergyconsumption,andlowerdelay.It demonstrateshowthefogcomputingover lowcontrol modeleffectivelyreducescongestionandoptimizes resourcescheduling,makingiteasierforhealthcare datatobeaggregatedandtransmittedsecurelyand ef icientlyoverIoTnetworks.
AUTHORS
RahulJaywantraoShimpi∗ –Research Scholar,DepartmentofElectronicsEngineering, MedicapsUniversity,Indore,India,e‐mail: rahul.shimpi@rediffmail.com.
VibhaTiwari –Professor,DepartmentofElectron‐icsEngineering,MedicapsUniversity,Indore,India, e‐mail:vibha.tiwari@medicaps.ac.in.
∗Correspondingauthor
References
[1] C.Guerrero,I.Lera,andC.Juiz,“Genetic‐based optimizationinfogcomputing:Currenttrends andresearchopportunities”, SwarmandEvolutionaryComputation,vol.72,2022,101094.http s://doi.org/10.1016/j.swevo.2022.101094.
TheaveragedelayismappedagainsttheFN’scom‐putecapabilityinFig.17.Theaveragetimeofthelocal computingmodelisindependentoftheFN‘scomputa‐tioncapacitybecausealljobsarecalculatedlocallyat theIoTdevices.
Thetotalaveragedelayversusthetotalnumberof RBsishighlightedinFig. 18.AsthenumberofRBs increases,alltheproposedmethod’scurvesdrastically decrease.Thisisbecauseanincreaseintheavailable spectrumresourcesresultsinasigni icantreduction inthetransmissiontime.
ThecomparisonofexecutiontimeforFOA[29], SSA[30],andtheproposedmethodisrepresented inTable 2.Fromthat,theproposedmethodhasthe lowestexecutiontimeamongothermethods.
[2] V.K.Quy,N.V.Hau,D.V.Anh,andL.A.Ngoc, “SmarthealthcareIoTapplicationsbasedonfog computing:architecture,applicationsandchal‐lenges”, Complex&IntelligentSystems,vol.8,no. 5,2022,3805–3815.https://doi.org/10.1007/ s40747‐021‐00582‐9.
[3] S.Goyal,N.Sharma,B.Bhushan,A.Shankar,and M.Sagayam,“IoTenabledtechnologyinsecured healthcare:applications,challengesandfuture directions”, CognitiveInternetofMedicalThings forSmartHealthcare:ServicesandApplications, 2021,25–48.https://doi.org/10.1007/978‐3‐030‐55833‐8_2.
[4] M.Ijaz,G.Li,L.Lin,O.Cheikhrouhou,H.Hamam, andA.Noor,“Integrationandapplicationsoffog computingandcloudcomputingbasedonthe internetofthingsforprovisionofhealthcareser‐vicesathome”, Electronics,vol.10,no.9,2021, 1077.https://doi.org/10.3390/electronics100 91077.
[5] S.M.Karunarathne,N.Saxena,andM.K.Khan, “SecurityandprivacyinIoTsmarthealthcare”, IEEEInternetComputing,vol.25,no.4,2021, 37–48.https://doi.org/10.1109/MIC.2021.3 051675.
[6] S.Tanwar,andJames,“Fogcomputingforhealth‐care4.0environments”,Switzerland:Springer InternationalPublishing,2021.https://doi.org/ 10.1007/978‐3‐030‐46197‐3.
[7] F.Farid,M.Elkhodr,F.Sabrina,F.Ahamed,and E.Gide,“Asmartbiometricidentitymanage‐mentframeworkforpersonalisedIoTandcloud computing‐basedhealthcareservices”, Sensors, vol.21,no.2,2021,552.https://doi.org/10.3 390/s21020552.
[8] N.Singh,M.Raza,V.V.Paranthaman,M.Awais, M.Khalid,andE.Javed,“InternetofThingsand cloudcomputing”,InDigitalHealth,151–162. AcademicPress,2021.
[9] A.R.Nasser,A.M.Hasan,A.J.Humaidi,A. Alkhayyat,L.Alzubaidi,M.A.Fadhel,J.Santa‐maría,andY.Duan,“Iotandcloudcomputingin health‐care:Anewwearabledeviceandcloud‐baseddeeplearningalgorithmformonitoringof diabetes”, Electronics,vol.10,no.21,2021,2719. https://doi.org/10.3390/electronics10212719.
[10] C.Huang,H.Wang,L.Zeng,andT.Li,“Resource schedulingandenergyconsumptionoptimiza‐tionbasedonLyapunovoptimizationinfogcom‐puting”, Sensors,vol.22,no.9,2022,3527.https: //doi.org/10.3390/s22093527.
[11] K.S.Awaisi,S.Hussain,M.Ahmed,A.A.Khan,and G.Ahmed,“LeveragingIoTandfogcomputing inhealthcaresystems”,IEEEInternetofThings Magazine,vol.3,no.2,2020,52–56.https://doi. org/10.1109/IOTM.0001.1900096.
[12] D.Kumar,A.K.Maurya,andG.Baranwal,“IoT servicesinhealthcareindustrywithfog/edge andcloudcomputing”,InIoT‐baseddataana‐lyticsforthehealthcareindustry,81–103,Aca‐demicPress,2021.https://doi.org/10.1016/B9 78‐0‐12‐821472‐5.00017‐X.
[13] N.A.S.Al‐Jamali,andH.S.Al‐Raweshidy,“Smart IoTNetworkBasedConvolutionalRecurrent NeuralNetworkWithElement‐WisePrediction System”,inIEEEAccess,vol.9,pp.47864–47874, 2021.https://doi.org/10.1109/ACCESS.2021. 3068610.
[14] E.S.L.Ho,“Datasecuritychallengesindeepneu‐ralnetworkforhealthcareIoTsystems”,Secu‐rityandPrivacyPreservingforIoTand5GNet‐works:Techniques,Challenges,andNewDirec‐tions,2022,19–37.https://doi.org/10.1007/97 8‐3‐030‐85428‐7_2.
[15] D.Li,W.Li,Y.Zhao,andX.Liu,“TheAnalysis ofDeepLearningRecurrentNeuralNetworkin EnglishGradingUndertheInternetofThings”,in IEEEAccess,vol.12,2024,44640–44647.https: //doi.org/10.1109/ACCESS.2024.
[16] S.S.Sefati,B.Arasteh,S.Halunga,O.Fratu,and A.Bouyer,“MeetUser’sServiceRequirementsin SmartCitiesUsingRecurrentNeuralNetworks andOptimizationAlgorithm”,in IEEEInternet ofThingsJournal,vol.10,no.24,2023,22256–22269.https://doi.org/10.1109/JIOT.2023.33 03188.
[17] M.AbdElaziz,L.Abualigah,andI.Attiya, “Advancedoptimizationtechniquefor schedulingIoTtasksincloud‐fogcomputing environments”, FutureGenerationComputer Systems,vol.124,2021,142–154.https: //doi.org/10.1016/j.future.2021.05.026.
[18] A.K.Sarangi,A.G.Mohapatra,T.C.Mishra,andB. Keswani,“Healthcare4.0:Avoyageoffogcom‐putingwithiot,cloudcomputing,bigdata,and machinelearning”, FogComputingforHealthcare 4.0Environments:Technical,Societal,andFuture Implications,2021,177–210.https://doi.org/10 .1007/978‐3‐030‐46197‐3_8.
[19] S.M.Hashemi,A.Saha i,A.M.Rahmani,and M.Bohlouli,“GWO‐SA:GrayWolfOptimization AlgorithmforServiceActivationManagementin FogComputing”,inIEEEAccess,vol.10,2022, 107846–107863.https://doi.org/10.1109/AC CESS.2022.3212439.
[20] Y.Ramzanpoor,M.H.Shirvani,andM.Gol‐sorkhtabaramiri,“Multi‐objectivefault‐tolerant optimizationalgorithmfordeploymentofIoT applicationsonfogcomputinginfrastructure”, Complex&IntelligentSystems,vol.8,no.1,2022, 361–392.https://doi.org/10.1007/s40747‐021‐00368‐z.
[21] D.Javaheri,S.Gorgin,J.A.Lee,andM.Masdari, “Animproveddiscreteharrishawkoptimiza‐tionalgorithmforef icientwork lowscheduling inmulti‐fogcomputing”, SustainableComputing: InformaticsandSystems,vol.36,2022,100787. https://doi.org/10.1016/j.suscom.2022.1007 87.
[22] H.Gezici,andH.Livatyali,“AnimprovedHarris HawksOptimizationalgorithmforcontinuous anddiscreteoptimizationproblems”, EngineeringApplicationsofArti icialIntelligence,vol.113, 2022,104952.https://doi.org/10.1016/j.enga ppai.2022.104952.
[23] R.Sing,S.K.Bhoi,N.Panigrahi,K.S.Sahoo,N. Jhanjhi,andM.A.AlZain,“Awhaleoptimiza‐tionalgorithmbasedresourceallocationscheme forcloud‐fogbasedIoTapplications”, Electronics, vol.11,no.19,2022,3207.https://doi.org/10.3 390/electronics11193207.
[24] C.Huang,H.Wang,L.Zeng,andT.Li,“Resource schedulingandenergyconsumptionoptimiza‐tionbasedonLyapunovoptimizationinfogcom‐puting”, Sensors,vol.22,no.9,2022,3527.https: //doi.org/10.3390/s22093527.
[25] C.Ren,X.Lyu,W.Ni,H.Tian,W.Song,andR.P. Liu,“Distributedonlineoptimizationoffogcom‐putingforinternetofthingsunder initedevice buffers”, IEEEInternetofThingsJournal,vol.7, no.6,2020,5434–5448.https://doi.org/10.1 109/JIOT.2020.2979353.
[26] T.Huang,W.Lin,C.Xiong,R.Pan,andJ.Huang, “Anantcolonyoptimization‐basedmultiobjec‐tiveservicereplicasplacementstrategyforfog computing”, IEEETransactionsonCybernetics, vol.51,no.11,2020,5595–5608.https://doi. org/10.1109/TCYB.2020.2989309.
[27] M.K.Ahirwar,P.K.Shukla,andR.Singhai, “CBO‐IE:adataminingapproachforhealthcare IoTdatasetusingchaoticbiogeography‐based optimizationandinformationentropy”, Scienti ic Programming,vol.2021,2021,1–14.https://do i.org/10.1155/2021/8715668.
[28] R.F.Mansour,A.ElAmraoui,I.Nouaouri,V. G.Díaz,D.Gupta,andS.Kumar,“Arti icial intelligenceandinternetofthingsenableddis‐easediagnosismodelforsmarthealthcaresys‐tems”, IEEEAccess,vol.9,2021,45137–45146.ht tps://doi.org/10.1109/ACCESS.2021.3066365.
[29] S.Sutradhar,S.Karforma,R.Bose,andS.Roy, “Adynamicstep‐wisetinyencryptionalgorithm withfruit lyoptimizationforqualityofservice improvementinhealthcare,” HealthcareAnalytics,vol.3,2023,100177.
[30] R.R.Irshad,A.AbduAlattab,I.M.Alwayle,K. M.Alalayah,K.MGNoaman,M.A.Mahdi,and A.M.Aqlan,“ANovelStructureOptoelectronic BiosensorforDetectionofInfectiousDiseases UsingSALPSwarmOptimizedArti icialNeural NetworkTechnique,” JournalofNanoelectronics andOptoelectronics,vol.17,no.8,2022,1154‐1162.
Abstract:
FINDINGTHESWEETSPOT:ASTUDYOFDATAAUGMENTATIONINTENSITYFOR
FINDINGTHESWEETSPOT:ASTUDYOFDATAAUGMENTATIONINTENSITYFOR
FINDINGTHESWEETSPOT:ASTUDYOFDATAAUGMENTATIONINTENSITYFOR
Submitted:28th June2025;accepted:22nd August2025
WindraSwastika
DOI:10.14313/jamris‐2025‐038
Findingtheoptimallevelofdataaugmentationinten‐sityremainsoneofthemostchallengingaspectsof trainingdeeplearningmodelsonsmall‐scaledatasets, whichisparticularlyrelevantforresource‐constrained environmentsinroboticsandautomationsystems.While dataaugmentationisuniversallyrecognizedasessen‐tialforpreventingoverfittingandimprovinggeneral‐ization,excessiveaugmentationcanparadoxicallyharm modelperformancebyintroducingtoomuchvariabil‐ityinthetrainingdata.Thisresearchinvestigatesthe “sweetspot”ofaugmentationintensitythroughacom‐prehensivestudyofsixdistinctaugmentationstrategies onCIFAR‐10,arepresentativesmall‐scaleimageclassi‐ficationbenchmarkcommonlyusedinmobilerobotics applications.Wedesignedacontrolledexperimentcom‐paring:NoAugmentation(baseline),Basictorchvision transforms,LightAdvancedalbumentations,Moderate Advancedgeometric‐photometriccombinations,Strong Advancedwithnoiseinjection,andAutoAugmentStyle withcomplextransformations.Ourfindingsrevealaclear relationshipbetweenaugmentationintensityandmodel performance,withpeakperformanceachievedatmod‐erateintensitylevels(Basicstrategywithintensityscore [IS]0.49).TheBasicaugmentationstrategyachieved 79.84%validationaccuracy,significantlyoutperforming bothminimalaugmentation(77.49%)andexcessiveaug‐mentation(71.64%).Throughstatisticalanalysisinclud‐ingcorrelationstudies(Pearson ��=−0.759, ��=0.080; Spearman ��=−0.714, ��=0.111),the“sweetspot” liesinbalancedaugmentationthatprovidesregulariza‐tionbenefitswithoutoverwhelmingthelearningprocess.
Keywords: Augmentationintensity,Small‐scaledatasets, Sweetspotoptimization,CIFAR‐10,Regularization
1.Introduction
Small‐scaleimagedatasetspresentuniquechal‐lengesindeeplearningapplicationsforautoma‐tionandroboticssystems,wherelimitedcomputa‐tionalresourcesandreal‐timeprocessingrequire‐mentsmakeef icientmodeltrainingcritical.The constraintofsmalltrainingdatasetsmakesmod‐elsparticularlysusceptibletoover itting,aproblem thatbecomesmorepronouncedinresource‐limited environmentstypicalofmobileroboticsplatforms [1].Dataaugmentationhasemergedastheprimary defenseagainstthischallenge,arti iciallyexpanding
trainingdatasetsthroughsystematictransformations whilepreservinglabelsemantics[2].However, inding theoptimalaugmentationintensity—the“sweetspot” whereregularizationbene itsaremaximizedwith‐outdegradinglearningorcomputationalef iciency— remainsanelusivegoalforpractitionersinautoma‐tionandrobotics.
Theconceptofaugmentationintensityencom‐passesboththediversityoftransformationsapplied andtheirmagnitude,factorsthatdirectlyimpactcom‐putationaloverheadinreal‐timesystems.Whileinsuf‐icientaugmentationfailstoprovideadequateregu‐larization,excessiveaugmentationcanintroducecom‐putationalburdenandvariabilitythatoverwhelms learningprocesses,whichisparticularlyproblematic fordeploymentinmobileroboticswhereprocessing powerislimited[3].Thiscreatesafundamentaltrade‐offbetweenmodelperformanceandcomputational ef iciencythathasbeenlargelyunexploredinsys‐tematicstudies,particularlyforsmall‐scaledatasets whereeverytrainingsampleispreciousandcompu‐tationalresourcesareconstrained.
CIFAR‐10,withits50,000trainingimagesacross 10classes,representsanidealbenchmarkforsmall‐scaleaugmentationstudiesrelevanttoroboticsappli‐cations[4].Thedataset’scharacteristicsmirrormany real‐worldroboticsscenarios:limitedtrainingdata, diverseobjectcategories,andtheneedforrobust classi icationundervaryingconditions.Unlikelarge‐scaledatasetssuchasImageNet,whereaugmentation bene itsmaybeovershadowedbydatavolume,small‐scaledatasetsmakeaugmentationeffectsmorepro‐nouncedandmeasurable,allowingforcleareriden‐ti icationofoptimalstrategiesapplicabletorobotics visionsystems.
Recentadvancesinautomatedaugmentationhave shownpromisebutoftenfocusonmaximizingperfor‐manceratherthanunderstandingthefundamental relationshipbetweenaugmentationintensityand computationalef iciency[5].AutoAugment[6]and RandAugment[7]representsigni icantprogressin automatedpolicydiscovery,buttheircomputational complexitymaylimitapplicabilityinresource‐constrainedroboticsenvironments.Thelackof systematicintensitystudiesleavespractitioners withlimitedguidanceforselectingappropriate augmentationstrategiesthatbalanceperformance andcomputationalrequirements.
Thisresearchaddressesthesegapsbyconducting acomprehensivesystematicstudyofaugmentation intensityeffectsonsmall‐scaleimageclassi ication, withparticularattentiontocomputationalef iciency considerationsrelevanttoautomationandrobotics applications.Ourcontributionsincludeempirical identi icationoftheaugmentationintensity“sweet spot”throughcontrolledexperimentation,statistical validationoftherelationshipbetweenintensityand performanceusingrigorousstatisticalmethods,com‐prehensiveanalysisofcomputationalef iciencytrade‐offsacrossdifferentaugmentationparadigms,and practicalguidelinesforaugmentationstrategyselec‐tionbasedonexperimentalevidenceapplicableto resource‐constrainedenvironments.
2.1.TraditionalDataAugmentationTechniques
Earlydataaugmentationresearchestablished foundationaltechniquesstillwidelyusedinrobotics applications.Krizhevskyetal.[8]demonstratedthe effectivenessofhorizontal lippingandrandomcrop‐pingintheirseminalAlexNetwork,establishingaug‐mentationasstandardpracticeincomputervision. Thesesimpletransformationsprovedparticularly valuableforroboticsapplicationswhereobjectsmay appearinvariousorientationsandpositionswithin thevisual ield.
Simardetal.[9]exploredelasticdeformations forhandwrittendigitrecognition,showingsigni i‐cantimprovementsincharacterrecognitionaccu‐racy.Theirworkhighlightedtheimportanceoftrans‐formationselectionbasedonexpectedvariationsin real‐worlddeploymentscenarios,aprincipledirectly applicabletoroboticsvisionsystemswhereenviron‐mentalconditionsvarysigni icantly.
Photometricaugmentationsgainedprominence withChat ieldetal.[10],whoinvestigatedcolor spacetransformationsandhistogramequalization techniques.Thesestudiesestablishedfoundations formodernaugmentationlibrariesandhighlighted theimportanceofdomain‐speci icaugmentation strategies,whichisparticularlyrelevantforrobotics applicationswherelightingconditionscanvary dramatically.
TheintroductionofAutoAugmentbyCubuketal. [6]markedaparadigmshifttowardlearnedaugmen‐tationpolicies.Usingreinforcementlearningtodis‐coveroptimaltransformationcombinations,AutoAug‐mentachievedstate‐of‐the‐artresultsonImageNet andCIFARdatasets.However,thecomputationalover‐headofpolicysearchlimitsitspracticalapplicability inresource‐constrainedroboticsenvironments.
RandAugment[7]addressedsomecomputational concernsbyreducingthesearchspacethrough magnitude‐basedparameterization.Thisapproach provedmoresuitableforpracticaldeployment whilemaintainingcompetitiveperformance.The workdemonstratedthatsimplerpoliciescould
achievecomparableresultstocomplexlearned strategies,particularlyrelevantforreal‐timerobotics applications.
Concurrentdevelopmentsinaugmentationtech‐niqueshaveexploredvariousapproachestoimprov‐inggeneralization.Mixup[14]introducedsynthetic trainingexamplesthroughlinearinterpolationof inputimagesandlabels,whileCutMix[15]extended thisconceptbycombiningspatialcuttingandmix‐ingtechniques.Thesemethodshaveshowneffective‐nessinspecializeddomains,includingradiomod‐ulationclassi icationwhereaugmentationstrategies mustaccountforsignalcharacteristics[16].Recent advancesinef iciency‐focusedaugmentationinclude TrivialAugment[5],whicheliminateshyperparameter tuningentirely,andsmartaugmentationapproaches thatlearnoptimalstrategiesautomatically[17].Such approachesalignwellwithroboticsdeployment requirementswheremanualtuningmaybeimpracti‐calandcomputationalresourcesarelimited.
Limitedresearchhasspeci icallyaddressedthe relationshipbetweenaugmentationintensityand modelperformanceinresource‐constrainedenviron‐ments.ShortenandKhoshgoftaar[2]providedcom‐prehensivesurveysofaugmentationtechniquesbut didnotsystematicallyanalyzeintensityeffectsor computationalconsiderationsrelevanttorobotics applications.
MüllerandHutter[11]investigatedaugmentation strengthinRandAugmentbutfocusedprimarilyon automatedpolicyselectionratherthanfundamen‐talintensityrelationships.Theirworksuggestedthat moderateaugmentationlevelsoftenperformbestbut lackedsystematicanalysisacrossdifferentaugmenta‐tionparadigms.
TaylorandNitschke[12]conductedpreliminary studiesonaugmentationstrengthcalibrationforspe‐ci ictransformationtypes.Their indingsindicated thatoptimalaugmentationlevelsdependondataset characteristicsandmodelarchitecture,butcompre‐hensiveanalysisacrossmultiplestrategiesremained limited.
RecentworkbyHendrycksetal.[13]explored augmentationrobustnessinadversarialsettings, showingthatmoderateaugmentationprovides betterrobustness‐accuracytrade‐offsthanextreme approaches.This indinghasrelevanceforrobotics applicationswhererobustperformanceundervarying conditionsiscritical.
3.1.DatasetandExperimentalSetup
WeconductedexperimentsusingCIFAR‐10,con‐sistingof60,00032×32colorimagesacross10classes [4].Thedatasetwassplitinto50,000trainingand 10,000validationimagesfollowingthestandardpro‐tocol.Allimageswereresizedto224×224pixels tomaintainconsistencywithmodernConvolutional NeuralNetwork(CNN)architecturesandenablefair
comparisonacrossaugmentationmethods.Thispre‐processingchoice,whileincreasingcomputational load,ensurescompatibilitywithtransferlearning approachescommonlyusedinroboticsapplications wherepre‐trainedmodelsprovidesigni icantadvan‐tages.
ThechoiceofCIFAR‐10forrobotics‐relevant researchstemsfromitssimilaritytomanyreal‐worldroboticsvisiontasks:limitedtrainingdata, diverseobjectcategories,andtheneedforrobust classi icationundervaryingconditions.Thedataset’s smallscalemakesitparticularlysuitableforstudy‐ingaugmentationeffectswithoutthecomputational overheadoflarge‐scaledatasets,makingitidealfor resource‐constrainedroboticsenvironments.
3.2.ModelArchitecture
WeemployedacustomCNNarchitecturespecif‐icallydesignedforcomprehensiveevaluationacross differentaugmentationstrategieswhilemaintaining computationalef iciencysuitableforroboticsdeploy‐ment(Figure 1).ThedecisiontouseacustomCNN ratherthanResNetwasmotivatedbyseveralfactors criticaltothisstudy:
1) ControlledComplexity:Acustomarchitecture allowsprecisecontrolovermodelcapacity, enablingclearerobservationofaugmentation effectswithouttheconfoundingfactorsofvery deeparchitectures.
2) ComputationalEf iciency:Ourarchitecture (approximately6.9Mparameters)ismoresuitable foredgedeploymentinroboticssystemscompared toResNet‐50(25.6Mparameters).
3) AugmentationSensitivity:Smallermodelsare moresensitivetoaugmentationeffects,making themidealforstudyingtheintensity–performance relationship.
4) RoboticsRelevance:Thearchitecturemirrors manysuccessfuldeploymentsinmobilerobotics wherecomputationalresourcesareconstrained. Themodelconsistsoffourconvolutionalblocks withbatchnormalization,ReLUactivation,andmax pooling,followedbyanadaptiveglobalaverage poolinglayerandthreefullyconnectedlayerswith dropoutregularization.Thisarchitectureprovides suf icientcomplexitytobene itfromaugmentation whileremainingcomputationallyef icientforsystem‐aticevaluationandpracticaldeployment.
Modelparametersinclude:32,64,128,and256 iltersinsuccessiveconvolutionallayers,kernelsizeof 3×3,strideof1,andpaddingof1.Thefullyconnected layershave512,256,and10neurons,respectively, withdropoutprobabilityof0.5duringtraining.
3.3.AugmentationIntensityClassificationFramework Wedevelopedanintensityscore(IS)framework thataddressesprobabilitybiasandprovidesfaircom‐parisonbetweendifferentaugmentationapproaches. Theframeworkcalculatesintensitybasedonthree keycomponentswithcorrectedprobabilityhandling. Insteadoftreatingprobabilityasanunfairmultiplier,
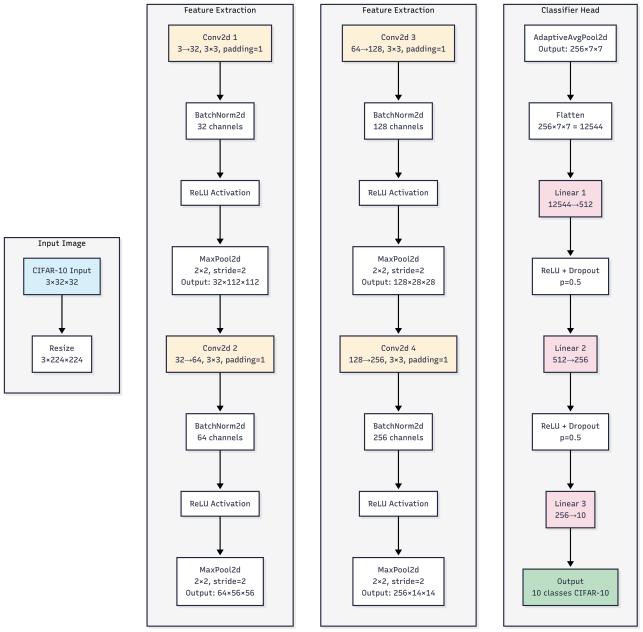
wecalculatetheexpectedimpactasBaseTransfor‐mationWeight×ParameterMagnitude×Application Probability.
‐ BaseTransformationWeights:Different transformationsreceiveweightsbasedon theirimpactonlearningdif iculty:(1) Benigntransformations(HorizontalFlip):0.5; Regularizingtransformations(RandomRotation, ColorJitter):0.8‐1.0;Moderatetransformations (ShiftScaleRotate,HueSaturationValue):1.5; Aggressivetransformations(RandomGamma): 2.5;Destructivetransformations(GaussNoise, CoarseDropout,GridDistortion):4.0.
‐ ParameterMagnitudeNormalization:Weemploy non‐linearscalingthatpenalizesextremeparameter valuesmoreheavilythanmoderateones,re lecting theirdisproportionateimpactonlearningdif iculty.
‐ PenaltySystems:Theframeworkincludespenal‐tiesfordestructivetransformationsandcon lict‐ingtransformationcombinationsthatmayinterfere witheachother.
Wedesignedsixaugmentationstrategieswithsys‐tematicallyvaryingintensitylevels:
1) NoAugmentation (Intensity:0.00)servesas experimentalcontrol,applyingonlyessentialpre‐processing:resizeto224×224pixelsandIma‐geNetnormalization.
2) LightAdvanced (Intensity:0.09)employsmini‐malalbumentations‐basedtransformations:hor‐izontal lipwith50%probabilityandconserva‐tivebrightness/contrastadjustments(±0.1range) appliedwith30%probability.
3) BasicOriginal (Intensity:0.49)representstra‐ditionaltorchvisionaugmentationwithfourcore transformations:horizontal lip(p=0.5),random rotation(±10∘),andcomprehensivecolorjitter affectingbrightness,contrast,andsaturation(±0.2 rangeeach).
4) ModerateAdvanced (Intensity:0.51)extends geometrictransformationsthroughalbumenta‐tions’ShiftScaleRotatefunctioncombinedwith enhancedphotometricadjustmentsincludingHSV modi ications.
5) StrongAdvanced (Intensity:0.94)represents highaugmentationintensity,combiningmultiple transformationswithdestructiveelements:coarse dropout,Gaussiannoiseinjection,andaggressive parameterranges.
6) AutoAugmentStyle (Intensity:0.98)incorpo‐ratessophisticatedtransformationsinspiredby automatedaugmentationpolicieswithcomplex geometriccombinationsandphotometricadjust‐ments.
3.4.TrainingProcedure
Allmodelsweretrainedfor15epochsusingidenti‐calhyperparameterstoensurefaircomparison.Adam optimizerwasemployedwiththelearningrate1e‐3, weightdecay1e‐4,andcosineannealingscheduling. Batchsizewassetto32acrossallexperiments.Each augmentationstrategywasevaluatedusingthesame randomseed(42)tocontrolforinitializationeffects.
Performancemetricsincludedtrainingandvali‐dationaccuracy,F1‐score(macro‐averaged),training time,memoryusage,andover ittinganalysisthrough train‐validationaccuracygapmeasurement.
Wealsoemployedcomprehensivestatisticalanal‐ysistovalidateour indings.Theanalysisincluded descriptivestatisticsforallperformancemetrics, correlationanalysisusingPearson,Spearman,and Kendallcoef icients,comparativeanalysisusingboth parametric(ANOVA)andnon‐parametric(Kruskal‐Wallis)tests,regressionanalysistomodelintensity‐performancerelationships,andcon idenceinterval estimationforkeymetrics.
Thestatisticalframeworkalsoincludedpower analysistoassesstheadequacyofoursamplesizeand effectsizecalculationstodeterminepracticalsigni i‐canceofobserveddifferences.Allstatisticalanalyses wereperformedwith��=0.05signi icancelevel.
4.1.OverallPerformanceComparison
Ourevaluationrevealedsigni icantperformance variationsacrossaugmentationstrategies,withapat‐ternthatsupportsthe“sweetspot”hypothesis.Table1 presentsperformancemetricsforallsixaugmentation approaches.
TheBasicaugmentationstrategyachievedthe highestvalidationaccuracyof79.84%,representing a2.35percentagepointimprovementoverthebase‐line.Thisperformancedemonstratestheeffectiveness ofmoderateaugmentationintensity.Notably,perfor‐mancedegradesasaugmentationintensityincreases beyondtheoptimalrange,withStrongAdvanced showingan8.20percentagepointdecreasefrompeak performance.
Thesubstantialtrainingtimedifferencesobserved acrossaugmentationstrategiesrevealfundamen‐talarchitecturaldifferencesbetweenaugmentation librariesandtheircomputationalimplementations. Themoststriking indingisthedramatic3.67x speedadvantagedemonstratedbyalbumentations‐basedstrategiesovertorchvisionimplementations, withalbumentationsstrategiesaveraging342.6sec‐ondscomparedtotorchvision’s1255.6secondsforthe Basicstrategy.
Thisperformancedisparitystemsfromfundamen‐taldifferencesinbackendimplementationandopti‐mizationstrategies.TorchvisionreliesheavilyonPIL (PythonImagingLibrary)forimagetransformations, whichoperatesprimarilyonCPUwithPython‐based processingpipelines.Eachtransformationrequires multiplememorycopiesanddatatypeconversions betweenPILImages,NumPyarrays,andPyTorchten‐sors,creatingsigni icantcomputationaloverhead.The ColorJittertransformationintheBasicstrategyexem‐pli iesthisinef iciency,requiringseparateoperations forbrightness,contrast,andsaturationadjustments, eachinvolvingcompleteimageprocessingcycles.
Incontrast,albumentationsleveragesOpenCV’s optimizedC++backendwithSIMD(SingleInstruction, MultipleData)vectorization,enablingparallelpro‐cessingofimageoperations.Thelibrary’sarchitecture allowsforsingle‐passprocessingofmultipletrans‐formations,minimizingmemorybandwidthrequire‐mentsandreducingcomputationaloverhead.This optimizationprovesparticularlybene icialincloud computingenvironmentslikeGoogleColabPro,where GPUresourcesaresharedandef icientutilization becomescriticalforcost‐effectivetraining.
4.2.StatisticalAnalysisoftheSweetSpot
Thecorrelationanalysisrevealsastrongrela‐tionshipbetweenaugmentationintensityandperfor‐mancedegradation.ThePearsoncorrelation(r=‐0.759,p=0.080)indicatesastrongnegativelinear relationship,whiletheSpearmancorrelation(�� =‐0.714,p=0.111)demonstratesastrongmonotonic relationshipsupportingthesweetspothypothesis.
Figure 1 illustratestheclearsweetspotphe‐nomenon,showingvalidationaccuracypeakingat moderateintensity(IS=0.49)anddecliningwithboth insuf icientandexcessiveaugmentation.Thescatter plotrevealsadistinctinverted‐Urelationship,withthe Basicaugmentationstrategyachievingoptimalper‐formanceatthetheoreticalsweetspot.
Theoptimalintensitypointcalculatedfromthe quadraticmodelis:
OptimalIntensity=4.579/(2×10.286)=0.223
PredictedOptimalPerformance=78.47% Thistheoreticaloptimumcloselymatchesour empirical indings,whereLightAdvanced(intensity 0.09)andBasic(intensity0.49)achievedthehighest performancelevelsintheexperimentalrange.The modelsuccessfullypredictsthatperformancepeaks inthemoderateintensityrangeanddegradeswith excessiveaugmentation.
Table1. Comprehensiveperformanceanalysisacrossaugmentationstrategies
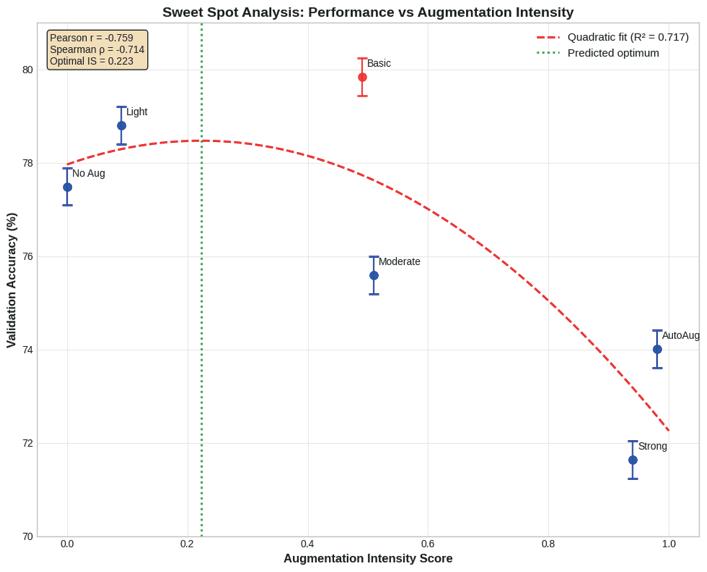
Figure2. Performancevs.AugmentationIntensity
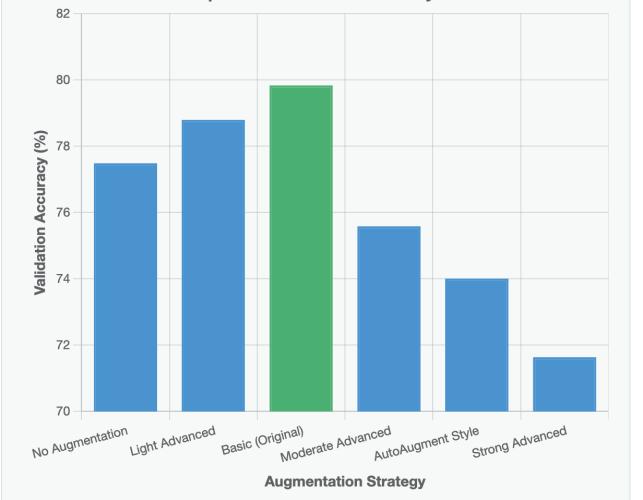
Figure3. Comprehensiveperformancecomparison acrossallaugmentationmethods
Pearsoncorrelationanalysisrevealedastrong negativelinearrelationship(r= 0.759,p=0.080), whileSpearmanrankcorrelationshowedaneven strongermonotonicrelationship(�� = 0.714,p= 0.111).Kendall’staucorrelation(�� = 0.467,p= 0.272)furthersupportsthistrend.Althoughthep‐valuesdonotreachstatisticalsigni icanceduetothe smallsamplesize(n=6),theconsistentnegativecor‐relationpatternacrossmultiplecorrelationmeasures stronglysupportstheinverted‐Uhypothesis.
Cohen’sdeffectsizesdemonstratethepractical signi icanceofour indings:
‐ Basicvs.StrongAdvanced:d=20.50(Verylarge effect)‐representingan8.2percentagepointdiffer‐ence
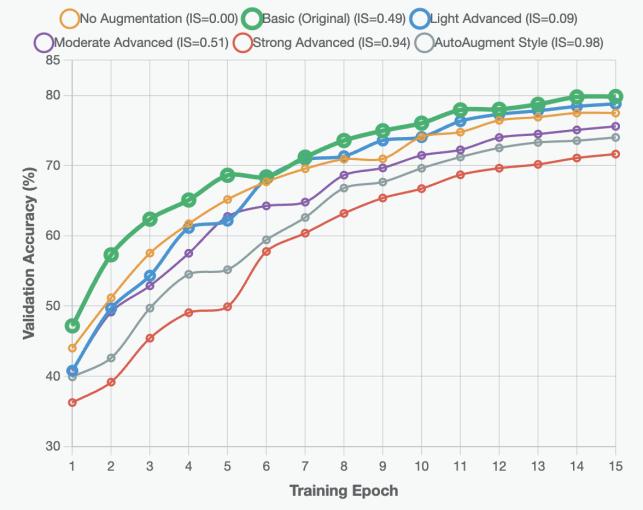
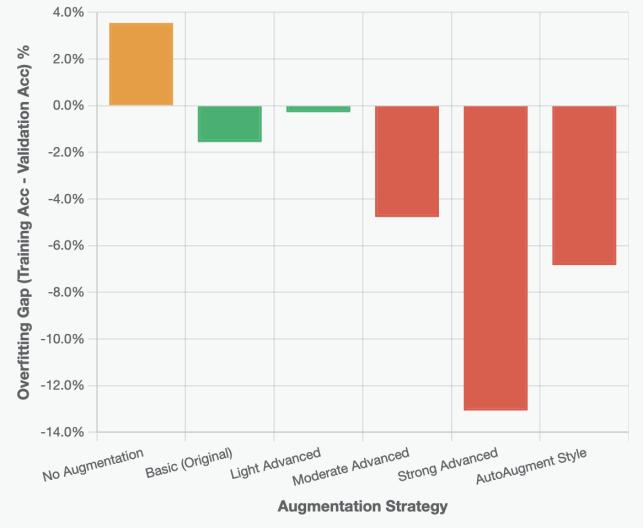
Figure5. OverfittingGapAnalysis
‐ LightAdvancedvs.StrongAdvanced:d=18.58(Very largeeffect)‐7.16percentagepointdifference
‐ Basicvs.NoAugmentation:d=5.86(Largeeffect)‐2.35percentagepointimprovement
‐ LightAdvancedvsNoAugmentation:d=3.27(Large effect)‐1.31percentagepointimprovement Theselargeeffectsizesindicatethatthediffer‐encesbetweenaugmentationstrategieshavesubstan‐tialpracticalimplicationsbeyondstatisticalsigni i‐cance.
Figure 3 providesacomprehensiveperformance comparisonacrossallaugmentationmethods,clearly highlightingtheBasicstrategy’ssuperiorityand theperformancedegradationpatternasintensity increasesbeyondtheoptimalrange.Thedataclearly
Table2. IntensityFrameworkValidationThroughComponentAnalysis
IntensityRange& Strategies
Baseline(0.0):No Augmentation 77.49% 0transformations
Onlypreprocessing:Resizeto 224×224,ImageNetnormalization Noregularizationbene it
Light(0.09) 78.80% 2transformations
Conservativediversity: HorizontalFlip(p=0.5),Random BrightnessContrast(p=0.3)Minimal buteffectiveregularization
Optimal(0.49):Basic 79.84% 3transformations
Optimaldiversitybalance: RandomHorizontalFlip(p=0.5), RandomRotation(±10∘),ColorJitter (brightness,contrast,saturation ±0.2)Perfect regularization‐performancetrade‐off
Moderate(0.51): ModerateAdvanced 75.59% 4transformations
Increasedcomplexity:HorizontalFlip (p=0.5),ShiftScaleRotate(p=0.4), RandomBrightnessContrast(p=0.4), HueSaturationValue(p=0.3) Complexitybeginstocreate interference
Heavy(0.94‐0.98): StrongAdvanced, AutoAugmentStyle 71.64%‐74.01% 5-6transformations
Excessivecomplexity:Multiple geometrictransforms,destructive elements(CoarseDropout, GaussNoise),Complexphotometric (GridDistortion,RandomGamma) Overwhelminglearningcapacity
showthatperformancepeaksatmoderateintensity (0.49)anddegradessubstantiallyasintensity increasesbeyondthisoptimalrange.
4.3.LearningCurveAnalysis
Figure 3 presentsthelearningcurveanalysis showingdistinctconvergencepatternsacrossaug‐mentationstrategies.Theoptimalstrategies(Basic andLightAdvanced)demonstratesmooth,consistent improvementwithminimaloscillation,reachingpeak performanceef iciently.Incontrast,excessiveaug‐mentation(StrongAdvanced)showserraticlearning patternswithpoor inalconvergence,whileinsuf i‐cientaugmentation(NoAugmentation)exhibitsan earlyplateauingcharacteristicofover itting.
Figure 4 illustratesthetrainingdynamicsacross differentaugmentationstrategies.Thelearningcurves revealseveralcriticalinsights:
‐ ConvergencePatterns: Optimalaugmentation strategies(Basic,LightAdvanced)showsmooth, consistentimprovementwithminimaloscillation.
‐ Over ittingBehavior: NoAugmentationexhibits classicover ittingwithtrain‐validationgapwiden‐ingafterepoch8.
‐ Under ittinginStrongAugmentation: Strong Advancedshowsconsistentlypoorperformance withvalidationaccuracyplateauingaround72%,
Maintainsoriginaldata idelitybut lacksregularizationcapacity,leading toover ittingontrainingdata
Moderateparametersbalance regularizationandstability
ModerateparametersRotation±10∘ , colorjitter±0.2rangeachieves optimalbalancebetween regularizationeffectivenessand learningstability
AggressiveparametersShift/scale ±0.1,rotation±15∘,HSV modi icationscreateincreased parameterrangesthatstart introducinginstability
AggressiveparametersRotation ±25∘,noiseinjection,aggressive parameterranges(±0.2+)distort datadistributionbeyondmodel’s learningcapacity
indicatingthemodelcannotlearneffectivelyfrom heavilyaugmenteddata.
Theover ittinggapanalysis(Figure 5)provides crucialinsightsintotheregulatorymechanismsatdif‐ferentintensitylevels:
‐ Positivegaps (NoAugmentation:+3.54%)indicate over itting
‐ Moderatenegativegaps (Basic: 1.56%,Light: 0.28%)suggestoptimalregularization
‐ Largenegativegaps (Strong: 13.06%,AutoAug‐ment: 6.83%)indicateunder itting
Thecolor‐codedvisualizationclearlyshowsthat optimalstrategiesmaintaingapsinthegreenzone ( 2%to+1%),whileexcessiveaugmentationcreates severeunder itting(redzone)andinsuf icientaug‐mentationleadstoover itting.Thisanalysiscon irms thatthesweetspotliesinthemoderatenegativegap range,whereaugmentationprovidessuf icientregu‐larizationwithoutoverwhelmingthelearningprocess.
4.4.IntensityScore(IS)FrameworkValidation
Theintensityquanti icationframeworkdemon‐stratedstrongempiricalvalidationthroughmultiple convergentlinesofevidence,con irmingitsutility asasystematictoolforaugmentationanalysisand deploymentdecision‐makinginroboticsapplications. Thecomprehensivecomponentanalysispresentedin Table 2 revealsseveralcriticalinsightsthatvalidate
theframework’spredictiveaccuracyandpractical utility.
TherelationshipbetweencalculatedISand observedvalidationaccuracyfollowsthepredicted inverted‐Upatternwithconsistency.Theframework successfullyidenti iestheoptimalintensityrange (0.09–0.49)wherebothLightandBasicstrategies achievesuperiorperformance,demonstratingits capabilitytopredictthesweetspotphenomenon.
Thetransformationdiversityanalysisreveals diminishingreturnsbeyondthreetofourdistinct transformationtypes,validatingtheframework’s penaltysystemforexcessivecomplexity.The baselinestrategywithzerotransformations providesinsuf icientregularization,leadingto over itting(+3.54%gap),whiletheoptimal strategiesemploytwotothreetransformations thatachieveperfectregularizationbalance.Beyond thisrange,additionaltransformationscontribute negligiblebene itswhileincreasingcomputational overheadandcreatingpotentialinterferencebetween differentaugmentationeffects,asevidencedbythe performancedegradationinHeavystrategies.
Despitetheframework’sempiricalsuccess,several importantlimitationsmustbeacknowledged.Thelin‐earcombinationoftransformationdiversity,param‐etermagnitude,andapplicationprobabilityassumes independentadditiveeffects,whichmaynotcapture complexinteractionsbetweendifferenttransforma‐tiontypes.Additionally,theequalweightingofall transformationtypesoverlookspotentialdifferences intheirimpactonlearningdif icultyandmodelper‐formance.Theframework’scalibrationonCIFAR‐10 mayrequireadjustmentforotherdatasetsordomains withdifferentcharacteristics.Nevertheless,thestrong correlationbetweenISandperformanceoutcomes (R2 =0.717)validatestheframework’sutilityforsys‐tematicaugmentationresearchandprovidesafoun‐dationformoresophisticatedintensityquanti ication approachesinfuturework.
5.Conclusion
Thissystematicstudyprovidesempiricalevidence foroptimaldataaugmentationintensityindeeplearn‐ing.Ourkey indingsinclude:(1)Aquadraticrela‐tionshipbetweenaugmentationintensityandmodel performancewithoptimalintensityaround0.223, (2)superiorperformanceofmoderateaugmenta‐tionstrategiesoverbothminimalandexcessive approaches,(3)importanttrade‐offsbetweenperfor‐manceandcomputationalef iciencyacrossaugmen‐tationlibraries,and(4)clearevidencethatexcessive augmentationcanbecounterproductive.
These indingsofferevidence‐basedguidelines forpractitionersworkingwithsmall‐scaledatasetsin roboticsandautomationcontexts,enablinginformed decisionsaboutaugmentationstrategyselection basedonspeci icperformanceandcomputational requirements.Thecomprehensivevisualization packageprovidespractitionerswithintuitivetools
forunderstandingaugmentationtrade‐offsand optimizingtheirdeploymentstrategies.
Futureworkshouldextendthese indingsto broaderdatasetsandarchitectureswhiledevelop‐ingstandardizedmetricsforaugmentationintensity assessment.Sucheffortswillcontributetomoreprin‐cipledandeffectiveuseofdataaugmentationindeep learningapplications.
AUTHOR
WindraSwastika∗ –InformaticsEngineering, UniversitasMaChung,Malang,65151,Indonesia, ORCIDID:0000‐0003‐4210‐7001,e‐mail: windra.swastika@machung.ac.id.
∗Correspondingauthor
References
[1] R.Caruana,S.Lawrence,andC.L.Giles,“Over it‐tinginNeuralNets:Backpropagation,Conjugate Gradient,andEarlyStopping,”AdvancesinNeu‐ralInformationProcessingSystems,vol.13,pp. 402–408.
[2] C.ShortenandT.M.Khoshgoftaar,“ASurveyon ImageDataAugmentationforDeepLearning,” JournalofBigData,vol.6,no.1,pp.1–48doi: 10.1186/s40537‐019‐0197‐0
[3] J.WangandL.Perez,“TheEffectivenessofData AugmentationinImageClassi icationusingDeep Learning,”arXivpreprintarXiv:1712.04621, 2017.
[4] A.Krizhevsky,“LearningMultipleLayersofFea‐turesfromTinyImages,”TechnicalReport,Uni‐versityofToronto,2009.
[5] S.G.MüllerandF.Hutter,“TrivialAugment: Tuning‐freeYetState‐of‐the‐ArtDataAugmenta‐tion,”ProceedingsoftheIEEE/CVFInternational ConferenceonComputerVision,pp.774–782.
[6] E.D.Cubuk“AutoAugment:LearningAugmenta‐tionStrategiesfromData,”Proceedingsofthe IEEE/CVFConferenceonComputerVisionand PatternRecognition,pp.113–123.
[7] BischlHyperparameterOptimization:Founda‐tions,Algorithms,BestPractices,andOpenChal‐lengesWileyInterdisciplinaryReviews:Data MiningandKnowledgeDiscovery,132,e1484 https://doi.org/10.1002/widm.1484
[8] A.Krizhevsky,I.Sutskever,andG.E.Hinton,“Ima‐geNetClassi icationwithDeepConvolutional NeuralNetworks,”CommunicationsoftheACM, vol.60,no.6,pp.84–90.
[9] P.Y.Simard,D.Steinkraus,andJ.C.Platt,“Best PracticesforConvolutionalNeuralNetworks AppliedtoVisualDocumentAnalysis,”Proceed‐ingsoftheSeventhInternationalConference onDocumentAnalysisandRecognition,vol.2, pp.958–963.
[10] K.Chat ield“ReturnoftheDevilintheDetails: DelvingDeepintoConvolutionalNets,”British MachineVisionConference,2014.
[11] S.G.Müller,L.Hollmann,andF.Hutter, “HyperparameterOptimization:Foundations, Algorithms,BestPractices,andOpen Challenges,”WileyInterdisciplinaryReviews: DataMiningandKnowledgeDiscovery,vol.13, no.2,e1484,2023.
[12] L.TaylorandG.Nitschke,“ImprovingDeep LearningwithGenericDataAugmentation,”IEEE SymposiumSeriesonComputationalIntelli‐gence,pp.1–8.
[13] D.Hendrycks“AugMax:AdversarialComposition ofRandomAugmentationsforRobustTraining,” AdvancesinNeuralInformationProcessingSys‐tems,vol.34,pp.237–249.
[14] H.Zhang,“Mixup:BeyondEmpiricalRiskMini‐mization,”InternationalConferenceonLearning Representations,2018.
[15] S.Yun,“CutMix:RegularizationStrategytoTrain StrongClassi ierswithLocalizableFeatures,” ProceedingsoftheIEEE/CVFInternationalCon‐ferenceonComputerVision,pp.6023–6032.
[16] F.Zhao,J.Huang,andJ.Gao,“DataAugmentation forDeepLearning‐BasedRadioModulationClas‐si ication,”IEEEAccess,vol.7,pp.15713–15722.
[17] J.Lemley,S.Bazra kan,andP.Corcoran, “SmartAugmentationLearninganOptimal DataAugmentationStrategy,”IEEEAccess, vol.5,pp.5858–5869doi:10.1109/ACCESS. 2017.2696121
Abstract:
DESIGNOFAFUZZYPIDCONTROLLERTOIMPROVEELECTRICVEHICLES
DESIGNOFAFUZZYPIDCONTROLLERTOIMPROVEELECTRICVEHICLES
DESIGNOFAFUZZYPIDCONTROLLERTOIMPROVEELECTRICVEHICLES
PERFORMANCEBASEDONREGENERATIVEBRAKINGSYSTEM
PERFORMANCEBASEDONREGENERATIVEBRAKINGSYSTEM
Submitted:17th June2025;accepted:27th August2025
HayderAbdulabbasAbdulameer,MAKhamis,MohammedJoudahZaiter,KarinEnnser
DOI:10.14313/jamris‐2025‐039
Thisstudyaimstoimproveenergystorageinelectric vehicleapplicationsusingaregenerativebrakingsystem. AbrushlessDCmotor(BLDC)waschosentopowerthe vehicleduetoitsinherentadvantagesandsuitability forelectricvehicles.Thesevehiclesrequirealowrateof errorandstableandtransientresponsestomakewheel accelerationsmoother.Themainobjectiveofthisstudy istoimproveresponsetimeandstabilityunderdiffer‐entoperatingconditionsandovercomethedrawbacks oftraditionalcontroltechniques.TraditionalPIDcon‐trollerssufferfromseveralproblems,includingtransient overshoots,loadfluctuations,andnon‐linearresponse, whichleadtopoorperformanceinelectricvehiclepropul‐sionsystems.Inthisstudy,afuzzyPIDcontrollerand ahysteresiscurrentcontrollooparedesignedforthe BLDCmotortoaddresstheaboveissues.Themotor speedandbatterychargestateareverifiedusingthe MATLAB/Simulinkenvironmentindifferentsituationsto measurethereliabilityoftheproposedcontroller.The resultsshowthatthisproposedcontrollerimprovesthe dynamicperformanceoftheregenerativebrakingsystem andenhancesotheroperatingcharacteristicssuchas maximumovershootandsettlingtime.
Keywords: Brushlessdirectcurrentmotor,Electricvehi‐cles,Fuzzylogicsystem,Hysteresiscurrentcontrolloop, Regenerativebrakingsystem
1.Introduction
Recently,globalwarminghasbecomeoneofthe biggestchallengesfacingthewholeworld.Toreduce pollution,manufacturersandgovernmentshavemade greateffortstogenerateelectricityfromvarious renewableenergysources[1,2].Amongthesealterna‐tivesareelectricvehicles(EVs),whichgeneratelower carbonemissionsandthusaimtoreplacetraditional internalcombustionengines(ICEs).EVshaveincreas‐inglyemergedasaneffectivesolutiontothechallenges ofenergyconsumptionandenvironmentalpollution [3].EVshavemanyadvantagesoverICEs,including powerfulacceleration,quietandsmoothoperation, energyef iciency,andleavingtheaircleaner[4].How‐ever,despitethesepositivefeaturesofEVs,typical customersarelesslikelytogravitatetowardthese vehicles.Thisisbecauseoflimitedtravellingdistance, theycancoveradistanceofonly50kminthebest traf icconditions.
Toadapttotheabovelimitation,EVcharging infrastructuresmustbeestablishedatmanydifferent locations.However,developingsuchinfrastructure facesnumerouschallenges,suchaslimitedspace,high initialcosts,repairandmaintenancerequirements, andoutdatedtechnology[5,6].
Oneeffectivemethodtoenhancetheenergyef i‐ciencyofEVsandextendtheirtravelrangeisbyimple‐mentingaregenerativebrakingsystem.Thisapproach meansthatthemechanicalenergyoftherotatingpart ofthevehicleisconvertedintoelectricalenergyand chargesthebatterywhilethevehicleisbraking.This meansthatthevehicle’sengineoperatesintwodif‐ferentmodes:asageneratorduringbrakingtostore energybackintothebattery,andasamotortomove thevehicleduringacceleration.Thisstandsincontrast tointernalcombustionenginevehicles,whichwaste thevehicle’skineticenergyasheatduetofrictional forcesbetweenthevehicle’swheelandbrakedisc. Thedrivingrangeofelectricvehiclescanbeincreased byupto25%byimplementingagoodregenerative brakingsystem[7,8].
Thespeedcontrolsystemisthemostimportant elementindeterminingtheef iciencyoftheregener‐ativebrakingsystem.Thereareseveralapproaches tocontrollingthespeed,andeachmethodvaries dependingontheapplicationandthetasksaccom‐plish.Proportionalintegralderivative(PID)con‐trollershavebeendesignedforaregenerativebraking systembasedonabrushlessDC(BLDC)motor[9,10]. However,despitethesimplicityofthePIDcontroller anditssuitabilityforrealworldapplications,thiscon‐trollerislinearandlimitedtoasinglepointinthe operatingstate.Therefore,aPIDcontrollerisnotthe bestchoicefornonlinearsystemswithvariablespeed processes.Inaddition,thePIDcontrollerhasother drawbacks,suchasovershoot,oscillationandslow responsetimes.
ControlsystemswithArti icialintelligence(AI) havebeenwidelyusedinvariousindustrialappli‐cationsduetotheiruniquecharacteristics[11]. Controller‐basedAIcandetectexceptionsandsubtle variationsthatareoftendif iculttoidentifyinnon‐linearsystems,andwhichcanalsoprovechallenging tocontrolusinga ixed‐gainPIDcontroller.Thereare variousadvancedcontroltechniquesAI‐basedalgo‐rithmshaveadoptedfortheregenerativebrakingsys‐tem.Fuzzycontrolisoneofthemostimportantcontrol toolsinarti icialintelligence.
Itisatechniquebasedonfuzzylogic,andisideal fornonlinear,imprecise,andindeterminatesystems. Fuzzycontroldoesnotrequireamathematicalmodel; instead,itoperateswithinrangesofvalues,interpret‐ingthemusinglinguisticvariables.Thismakesitideal forcontrollingsystemswherepreciserelationships aredif iculttode ineormaintain,andeliminatesthe needforconstantsupervisionbyaquali iedopera‐tor.Variousresearchareashaveusedfuzzylogiccon‐trollersforelectricvehicles[12, 13].In[14],fuzzy logiccontrolwasproposedtocontrolthemotorspeed forregenerativebrakingenergy.Threeinputsnamely, batterycharge,brakingforceandmotorspeedandone outputnamely,thecontrolsignalwereused.Ninget al.[15]proposedafuzzycontroltechniquethatled toa5.4%increaseintheeffectiverecoveryrateof regenerativebrakingenergy.Zhaoetal.developeda fuzzyoptimizationalgorithmthatreducedthebattery usagebyapproximately1.22%[16].
Inthisstudy,aneffectiveandhighlyef icient controlmethodisproposedtooptimizethebattery energystorageforaregenerativebrakingsystem. TheproposedcontrolsystemconsistsofafuzzyPID speedcontrollerandahysteresiscurrentcontrolloop. Themotorspeedisevaluatedundervariousoperat‐ingconditionsduringaccelerationandbraking.Com‐paredtootherstudiestheresultsindicatethatthe actualspeedcloselyfollowedthedesiredspeed,with ashortersettlingtimeandwithoutanyovershotinthe response.
Inelectricvehicles,theaimoftheregenerative brakingsystemistorecoverbrakingenergybydis‐tributingitevenlywhilecon irmingbrakingsafety. Thevehicle’skineticenergycanbestoredinthe batteryafterbeingconvertedintoelectricalenergy throughanenergyextractionprocesscalledregenera‐tivebrakingtechnology[17].Theregenerativebraking systemhastwooperatingmodes,accelerationandde‐accelerationasshowninFigure 1.Inthe irstmode, themotorcangeneratekineticenergyfromtheelectri‐calpowerofthebattery.Theresultingreverseelectro‐motiveforceopposesthevehicle’smotionaccording toLenz’slaw,increasingthestrengthofthemagnetic ieldandacceleratingthevehicle.Inthesecondmode, whenthevehiclebrakes,thebatteryischargedby convertingkineticenergyintoelectricalenergy.Inthis mode,themachineactsasagenerator,whichreduces thestrengthofthemagnetic ieldanddecreasesthe vehiclespeedpro ile[18].
Therearefourmaincomponentsofregenerative brakingtechnology,asshowninFigure2.Theelectric motor/generatoristhekeycomponentforconverting electricalenergyintokineticenergyduringaccelera‐tion,andviceversaduringbraking.Thiscomponent actsasageneratorduringdecelerationandasamotor duringacceleration.
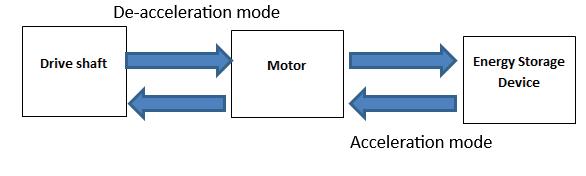
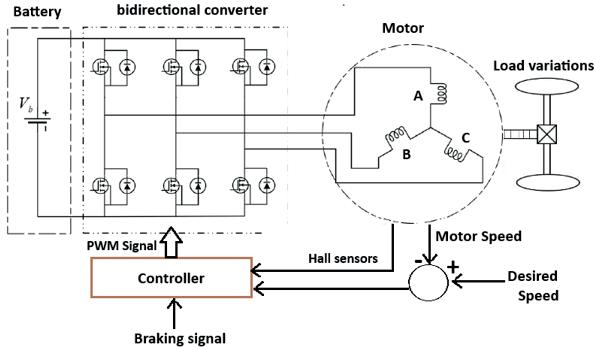
Thebidirectionalconvertercircuitisthesecond component,andisusedtomanagethe lowofelectri‐calpowerbetweenthemotorandgenerator,switch‐ingtheoperatingmodesoftheregenerativebraking system.Thebatteryisthethirdcomponent,andit storeselectricalenergygeneratedduringbrakingfor lateruse.Thisstoredenergypowersthevehicleor supportsthemainpropulsionsystemduringaccel‐eration.Theregenerativebrakingcontrolleristhe inalcomponent,controllingtheregenerativebraking operationmodeandcoordinatingtheoperationof thebatterypack,bi‐directionalconverter,andelectric motor/generatortooptimizeenergyrecoveryduring braking.
Themainfunctionofthecontrollerinaregener‐ativebrakingsystemistorecoverenergyinelectric vehiclesthatmaybelostduringbraking.Thecon‐trollerdesignaimstoensurethedurabilityandsta‐bilityfortheregenerativebrakingsystem.Regener‐ativebrakingcontrolisappliedtoverifythetypeof operatingmode,whichdeterminesthevehiclespeed andtorqueestimation.Inaccelerationmode,thisunit increasestheenginespeedbyincreasingtheapplied voltage,whichiscontrolledbythepulsewidthas appliedtothebidirectionalswitches.Whileinbraking mode,thisunitreducestheenginespeedbyreduc‐ingtheappliedvoltage,andreversestherotationto operateingeneratingmodesothatitcanstoreenergy backintothebattery.Theregenerativebrakingsystem canbeoptimizedwithpropercontrolunitselection, resultinginreducedbrakingtimeandincreasedbat‐teryef iciency.
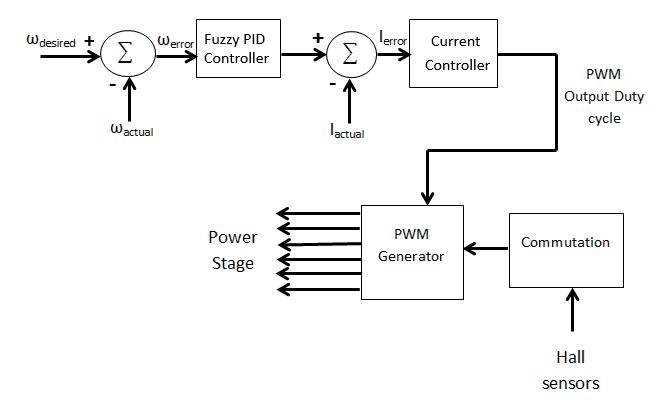
Figure3. Proposedcontroloftheregenerativebraking system
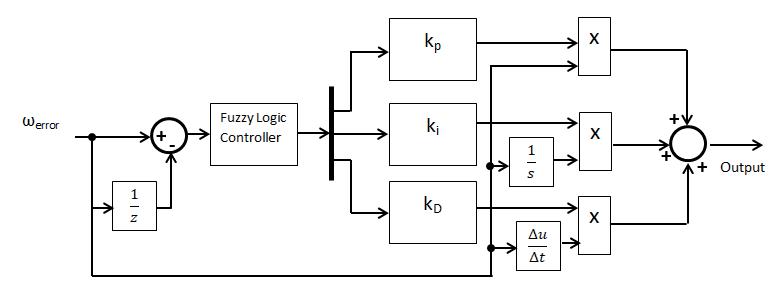
Figure4. BlockdiagramofproposedFuzzy‐PIDcontroller
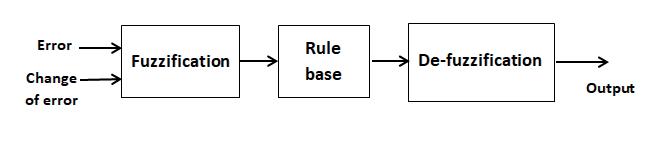
Figure5. BlockdiagramofFuzzylogiccontroller
Inthisstudy,theproposedcontrollerconsistsof thespeedandcurrentcontrollers,asshowninFig‐ure 3.Thespeedcontrollerisbasedonfuzzylogic algorithm,whilethecurrentcontrollerisbasedona Hysteresiscurrentcontrolloop.
3.1.FuzzyLogicController
FuzzylogicisabranchofAIthatusesthelinguistic termstoanalyzeandinterpretinaccurateinformation. Ithasbeeninusesince1965,anditremainspopular duetoitsreliabilityinsolvingnonlinearandcomplex applications.Fuzzylogiccontrolsystemsare lexible enoughtohandledifferentapplications,andcanbe combinedwithothercontrolalgorithmstooptimize controlsystems[19].Inthisstudy,fuzzylogiccontrol isusedtotunethePIDcoef icientsinordertocontrol themotorspeedunderdifferentoperatingconditions. Figure 4 showstheproposedFuzzy‐PIDcontroller whichconsistsofthreefuzzylogicblocksforKp,Kiand Kd ofPIDcoef icients,whereKp,Ki andKd arethepro‐portional,integralanddifferentialgains,respectively. Theinputsofeachblockarethesamenamely,error anddeltaerrorwhiletheoutputsareKp,KiandKd.The PIDcontrolthenprocessestheseoutputstoadjustthe voltageappliedtothemotor.
Table1. 5×5Rulebasetableusedinthecontrolsystem
Δe/
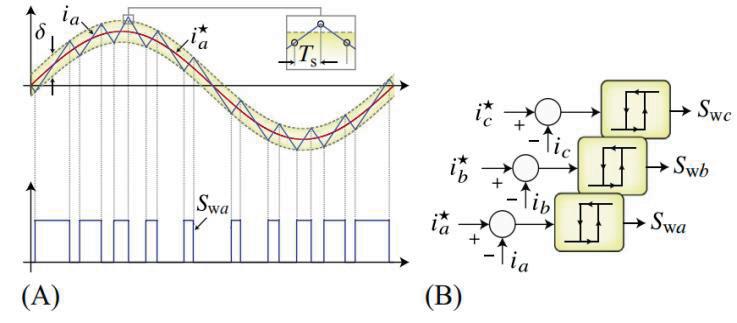
Figure6. Principleoperationofhysteresiscurrent controlloop
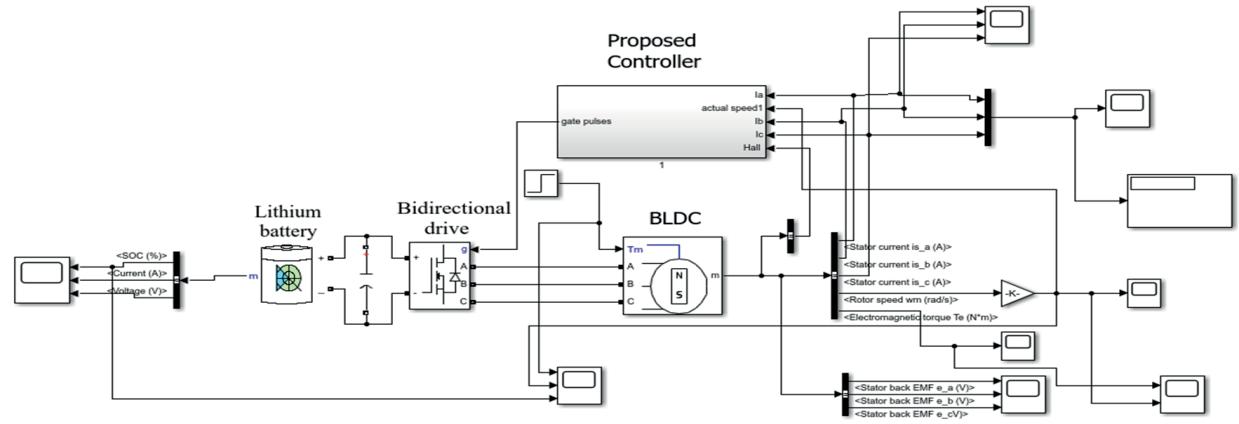
Figure7. Theproposedregenerativebrakingsystemin MATLABSimulink
Table2. SelectedparametersofBLDC[21]
Rating Symbol Value
Inductance L 0.0144mH
DCresistance R 0.0065?
Numberofpoles P 8
Ratedvoltage V 48v
Momentofinertia J 0.00019kg.m2
Motortorquecoef icient Kt 0.095N.m/A
Viscousdamping F 1*10−6 N.m.s Fluxlinkage �� 0.0059375V.s
Loadtorque TL 4N.m
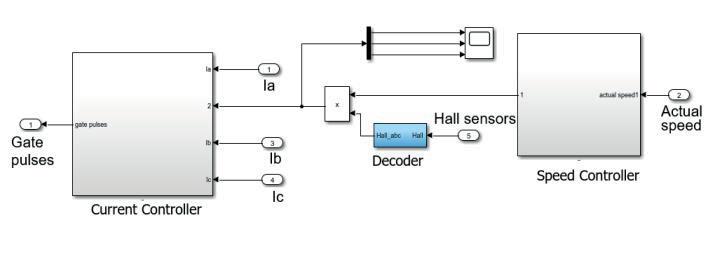
Figure8. TheproposedcontrollersubsysteminMATLAB Simulink
ThefuzzylogiccontrollerisillustratedinFigure5 Allinputvariableshave ivefuzzysubsets,whichare NB,NS,ZZ,PS,PB,whereNisfornegative,Bisfor big,Sisforsmall,ZZisforzeroandPisforpositive. Atrimf(triangularmembershipfunction)isselected withtheMamdanimethod.Eachinputhas ivefuzzy memberships;therefore,thereare25rules,ascanbe seeninTable1.
Table3. Comparativeanalysisoftheproposedcontrollerwiththeexistingcontrolsystem
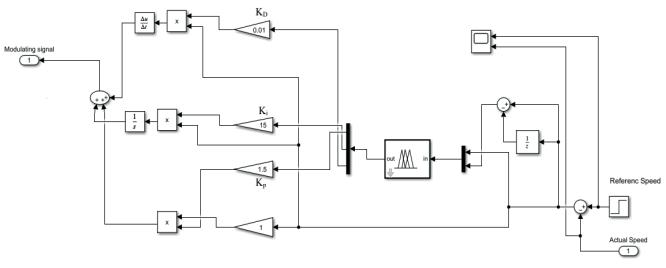
Figure9. ThespeedcontrollersubsysteminMATLAB Simulink
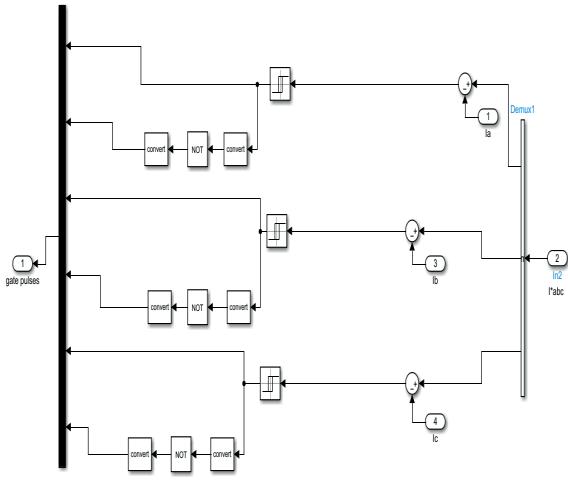
Figure10. ThecurrentcontrollersubsysteminMATLAB Simulink
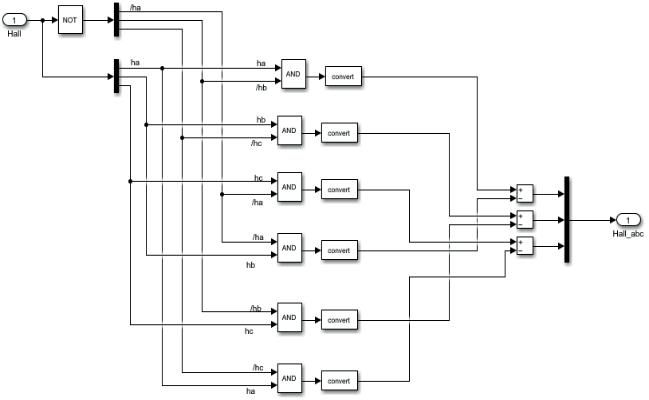
Figure11. ThedecoderblockinMATLABSimulink
3.2.HysteresisCurrentControlLoop
Thiscontrolsystemisappliedtocontrolthe lowofmotorcurrentsthroughthesystem.Itcom‐parestheactualcurrentvaluewiththecontrolsig‐nalreceivedfromthefuzzyPIDcontroller,adjusting systemparameterstomaintainthedesiredcurrent level.Thehystereticloopcreatesatolerancerange withinwhichthecurrentcanvarywithoutrequiring anycontrolaction.Thismethodissimpleandfast‐response,makingitsuitableforapplicationsrequiring precisecurrentcontrol.
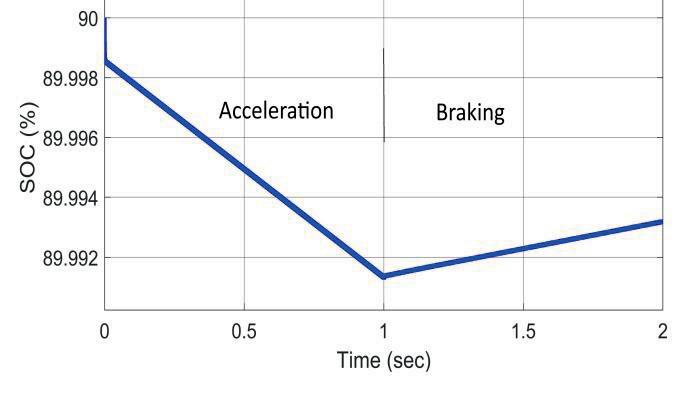
Figure12. VariationofSOCwithtimeat90%ofinitial batterychargestate
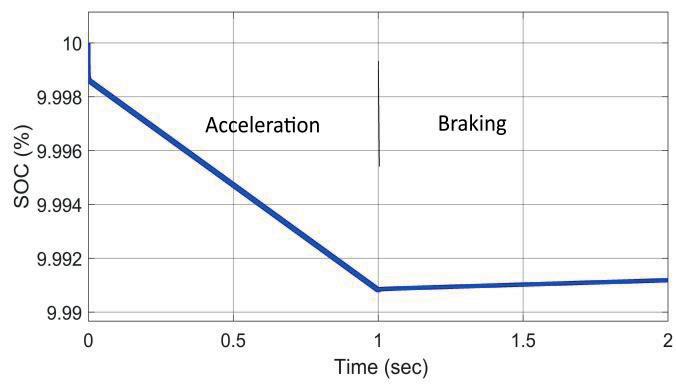
Figure13. VariationofSOCwithtimeat10%ofinitial batterychargestate
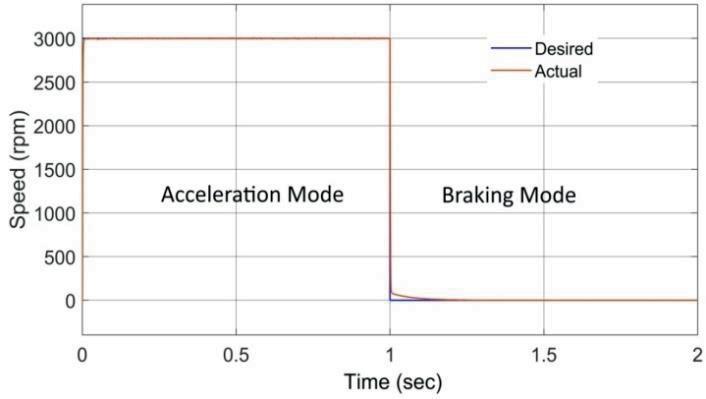
Figure14. Thevariationofdesiredandactualmotor speedwithtimeunderacceleratingandbrakingmodes
Thedutycycleofthepulse‐widthmodulation (PWM)pulsesvariesaccordingtotheoutputofthis controller,asillustratedinFigure6[20].
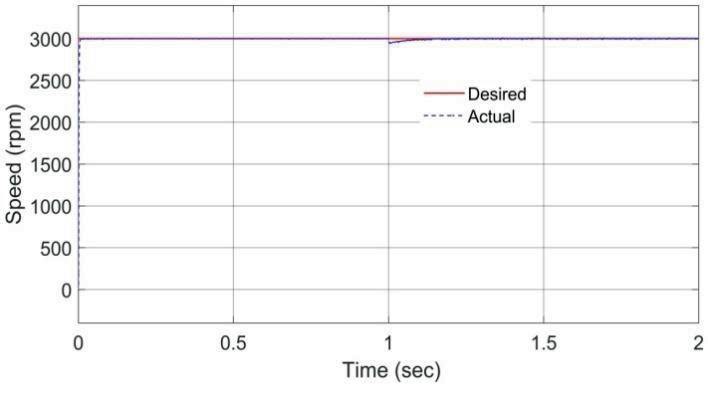
Figure15. Thevariationoftheactualmotorspeedwith timeundersuddenchangeinloadinacceleratingmode
Thefunctionofthehysteresiscurrentcontroller istogenerategatedsignalsforthebidirectional switches.Themeasuredmotorcurrents(ia,ib,ic)are comparedwiththereferencecurrents(ia ∗,ib ∗,ic ∗). Thecomparatorisfedbythecalculatederrorbetween thereferenceandactualcurrentswithaprescribed hysteresisband,asshowninFigure6(b).Anyswitchis turnedoffwhentheactualcurrentattemptstoexceed asetvaluethatcorrespondstothereferencecurrent asshowninFigure6(a).Despitethesimpleimplemen‐tationofthehysteresiscurrentcontroller,theswitch‐ingfrequencyvarieswiththereferencecurrentsand doesnotremainconstant.
AMATLABSimulinksoftwarewasusedinthis studytodesignaregenerativebrakingsystemwith theproposedcontrollertoimproveenergystorage ef iciency.Figures7,8,9,10and11providethesimu‐lationblocksoftheproposedsystembasedonaFuzzy‐PIDcontrolmethodinMATLABSimulink.Thedesign consistsoffourmaincomponents:theBLDCmotor, thebidirectionaldrivecircuit,lithiumbatteryandthe proposedcontroller.Table2showstheBLDCmotor parametersusedintheimplementation.Toclearlydis‐playthesystemoperatingmodes,the2‐secondoper‐atingtimeisdividedintotwosteps;a1‐secondperiod representstheaccelerationmode,whiletherestofthe periodisthebrakingmode.Thevehiclespeedstarted at3,000rpmupto1secondinaccelerationmodeand thensloweddowntozerofortherestoftheperiod inbrakingmode.Theloadtorquevariedaccordingto theoperatingmode;itwasapositivevalue(4N.m)in accelerationmodeandanegativevalue( 4N.m)in brakingmode.
The irstparametertoinvestigateinourstudywas thebatterystateofcharge(SOC).Twodifferentinitial batterychargestates90%and10%areusedtoeval‐uatetheproposedsystemundervariousconditions. Thebatterydischargingandchargingareshownin Figures12and13atSOC90%and10%,respectively. Thesimulationindicatesthatthebatterydischarges for1secondduringaccelerationmode,andstarts chargingafter1secondwhenbrakingmodeisacti‐vated.Thisdemonstratesthattheproposedsystem chargesthebatteryatanyinitialbatterycharge.
Themotorspeedwasthenextparametertobe investigatedinthesimulationunderdifferentoperat‐ingmodes.Therequiredspeedwas3,000rpmwhen acceleratingand0rpmwhenbraking.Figure14shows howthemotorspeedchangesovertime,inresponse todifferentinputconditions.Theactualspeedof themotorfollowedtherequiredresponsewithout anyovershoot.Thismeansthatthemotorresponse exceedsthe inalsteady‐statevalue.Settlingtimeis de inedasthetimerequiredforasystemtosettle withinacertainpercentageofthedesiredoutput,and itiscalculatedatabout15ms.
Theperformanceoftheproposedsystemwas investigatedunderload luctuations.Figure15illus‐tratesBLDCmotorperformanceunderasudden changeintheloadtorque.Theloadwassuddenly increasedfrom4N.mto10N.mat1swithmotor speedheldconstant.Thesimulationresultindicates thattheundershootvalueisapproximatelyequalto28 rpmwith75msofsettlingtimewhentheloadtorque issuddenlychangedto10N.Mat1sec.
Acomparativeanalysiswasconductedtoevaluate theeffectivenessoftheproposedmodelcomparedto otherexistingmodels.Table3showsthecomparative analysisconductedfortheproposedmodelwiththe prevailingmethodsintermsofovershootandsettling time.Theseresultsdemonstratethattheproposed controllerhasamuchfasterresponsethantheexisting controllers,meaningitreachesthedesiredoperating speedslightlyfaster.Thus,theproposedcontroller providesmoreef icientandstablecontrolofregen‐erativebrakingsystemsandismoresuitableforEV applications.
Inthisstudy,theregenerativebrakingtechnique wasinvestigatedintermsofitspotentialtoenhance energystorageinelectricvehicles.ABLDCmotoris usedtopowerthevehicles.Themainadvantagesof thistypeofmotorarethatitisquieterinoperation, andthatitrequireslessmaintenanceduetoitscom‐mutatorandbrushlessoperation.Acombinationofa fuzzyPIDcontrollerandahysteresiscurrentcontrol loopwasproposedtocontrolthemotorspeed.AMAT‐LABSimulinkprogramwasdevelopedtoimplement theproposedsystemwhileachievingdifferentoutput simulations.
Thebatterystateofcharge(SOC)wasstudied atboth10%and90%oftheinitialcharge.Simu‐lationresultsindicatedthattheadvantagesofthe proposedsystemlieinitsabilitytochargethebat‐terytoanyinitialchargevalue.Motorspeedwas evaluatedundervariousoperatingconditionsdur‐ingaccelerationandbraking.Theactualspeedwas closetothedesiredspeed,withashortersettling timecomparedtootherstudies.Furthermore,simu‐lationresultsshowedthattheproposedcontrolsys‐temcanimproveregenerativebrakingperformanceby increasingbatterystoragepower.
Thisproposaloffersgoodbrakingperformancein termsofef iciency,robustness,andsimplicity,proving ittobethebestchoiceforEVs.
AUTHORS
HayderAbdulabbasAbdulameer –Departmentof ComputerEngineeringTechniques,ElectricalEngi‐neeringTechnicalCollege,MiddleTechnicalUniver‐sity,Baghdad,Iraq,e‐mail:bbc4008@mtu.edu.iq.
MAKhamis∗ –BaqubaTechnicalInstitute,Middle TechnicalUniversity,Baghdad,Iraq,e‐mail:mustafa‐electronic@mtu.edu.iq.
MohammedJoudahZaiter –DepartmentofCom‐puterEngineeringTechniques,ElectricalEngineering TechnicalCollege,MiddleTechnicalUniversity,Bagh‐dad,Iraq,e‐mail:mjzaiter@mtu.edu.iq.
KarinEnnser –CollegeofEngineering,Swansea University,Swansea,Wales,UnitedKingdom,e‐mail: k.ennser@swansea.ac.uk.
∗Correspondingauthor
References
[1] V.B.MuraliKrishna,V.Sandeep,B.K.Narendra, andK.R.K.V.Prasad,“ExperimentalStudyonSelf‐ExcitedInductionGeneratorforSmall‐ScaleIso‐latedRuralElectricityApplications,” Resultsin Engineering,vol.18,2023,10118. https://doi. org/10.1016/j.rineng.2023.101182
[2] M.SternerandI.Stadler, HandbookofEnergy Storage:Demand,Technologies,Integration, Springer,2019.
[3] C.C.ChanandK.T.Chau, ModernElectricVehicle Technology,OxfordUniversityPress,2002.
[4] F.R.Salmasi,“Controlstrategiesforhybridelec‐tricvehicles:Evolution,classi ication,compar‐ison,andfuturetrends,”IEEETransactionson VehicularTechnology,vol.56,no.5,2023,pp. 2393–2404.https://doi.org/10.1109/TVT.20 07.899933
[5] Tsakalidis,J.Krause,A.Julea,E.Peduzzi,E.Pisoni andC.Thiel,“Electriclightcommercialvehicles: Aretheythesleepinggiantofelectromobility?,” TransportationResearchPartD:Transportand Environment,vol.86,2020,102421,https://doi. org/10.1016/j.trd.2020.102421
[6] T.Capuder,D.M.Sprčcćc,D.ZoričícandH. Pand ic,“Reviewofchallengesandassessment ofelectricvehiclesintegrationpolicygoals:Inte‐gratedriskanalysisapproach,” International JournalofElectricalPower&EnergySystems,vol. 119,2020,105894.https://doi.org/10.1016/j.ij epes.2020.105894
[7] S.Heydari,P.Fajri,M.RasheduzzamanandR. Sabzehgar,”MaximizingRegenerativeBraking EnergyRecoveryofElectricVehiclesThrough DynamicLow‐SpeedCutoffPointDetection,”
IEEETransactionsonTransportationElectri ication,vol.5,2019,pp.262‐270.https://doi.org/ 10.1109/TTE.2019.2894942
[8] S.Heydari,P.Fajri,R.SabzehgarandA.Asrari, “OptimalBrakeAllocationinElectricVehiclesfor MaximizingEnergyHarvestingDuringBraking,” IEEETransactionsonEnergyConversion,vol.35, 2020,pp.1806‐1814.https://doi.org/10.1109/ TEC.2020.2994520
[9] V.Oghafy,H.NikkhajoeiandJ.S.Zamani, “AnadaptivecontrollerforsensorlessPMsyn‐chronousmotordriveforelectricvehicles,” IEEE VehiclePowerandPropulsionConference,Dear‐born,MI,2009,pp.265–269. https://doi.org/ 10.1109/VPPC.2009.5289843
[10] B.K.Lee,M.Ehsani,“Advancedsimulationmodel forbrushlessDCmotordrives,” ElectricPower ComponentsandSystems,vol.31,2003,pp.841–868.http://dx.doi.org/10.1080/15325000390 227191
[11] T.Pidikiti,G.Shreedevi,M.Subbarao,andV.B.M. Krishna,“DesignandcontrolofTakagi‐Sugeno‐Kangfuzzycontrollerbasedinverterforpower qualityimprovementingrid‐tiedPVsystems,” Measurement:Sensors,vol.25,2023,100638.ht tps://doi.org/10.1016/j.measen.2022.100638
[12] W.Fan,T.Chen,“Designandimplementationof fuzzyPIDcontrollerforbrushlessDCmotorcon‐trolsystem,” AppliedMechanicsandMaterials, vol.432,2013,pp.472–477. https://doi.org/ 10.1109/PEDES.2012.6484251
[13] D.Potnuru,T.S.L.Ayyarao,.,L.V.S.Kumar,Y.V. Kumar,andD.J.Pradeep,“Salpswarmalgorithm basedoptimalspeedcontrolforelectricvehi‐cles,” Int.J.PowerElectron.DriveSyst.(IJPEDS), vol.13,no.2,2022,pp.755–763.http://doi.org/ 10.11591/ijpeds.v13.i2.pp755‐763
[14] H.Zhang,G.Xu,W.LiandM.Zhou,”Fuzzy logiccontrolinregenerativebrakingsystemfor electricvehicle,”2012 IEEEInternationalConferenceonInformationandAutomation,Shenyang, China,2012,pp.588–591.https://doi.org/10.1 109/ICInfA.2012.6246881
[15] X.BNing,J.Z.Wang,Y.M.Yin,J.R.Shangguan,N.X. BaoandN.Li,“RegenerativeBrakingAlgorithm forParallelHydraulicHybridVehiclesBasedon FuzzyQ‐Learning,”. Energies,vol.16,2023,1895. https://doi.org/10.3390/en16041895
[16] Q.HZhao,H.X.ZhangandY.F.Xin,“Researchon ControlStrategyofHydraulicRegenerativeBrak‐ingofElectrohydraulicHybridElectricVehicles” MathematicalProblemsinEngineering,vol.2021, 2021,pp.5391351.https://doi.org/10.1155/20 21/5391351
[17] A.AhmedandCui.Shumei,“Differentarchitec‐turesandmodesofoperationofHEVbasedon permanentmagnet‐electricvariabletransmis‐sionwithrule‐basedandfuzzylogicglobalcon‐trolstrategy,” InternationalJournalofElectric
andHybridVehicles(IJEHV),vol.4,2012,pp.69–92.http://dx.doi.org/10.1504/IJEHV.2012.04 7873.
[18] J.WKo,S.Y.Ko,I.S.Kim,D.Y.HyunandH.‐S.Kim, “Co‐operativecontrolforregenerativebraking andfrictionbrakingtoincreaseenergyrecov‐erywithoutwheellock,” InternationalJournalof AutomotiveTechnology,vol.15,2014,253262. https://doi.org/10.1007/s12239‐014‐0026‐6
[19] O.ACordon,“Ahistoricalreviewofevolutionary learningmethodsforMamdani‐typefuzzyrule‐basedsystems:Designinginterpretablegenetic fuzzysystems,” InternationalJournalofApproximateReasoning,vol.52,2011,pp.894–913.http s://doi.org/10.1016/j.ijar.2011.03.004
[20] S.GautamandR.Gupta,“Generalizedhystere‐siscurrentcontrollerforthree‐levelinverter topologies,” 2012IEEEInternationalSymposium onIndustrialElectronics,Hangzhou,China,2012, pp.1393–1398.https://doi.org/10.1109/ISIE.2 012.6237294
[21] S.Mopidevietal.,“Design,controlandperfor‐mancecomparisonofPIandANFIScontrollers forBLDCmotorDirvenelectricvehicles,” Measurement:Sensors,vol.31,2024,101001..https: //doi.org/10.1016/j.measen.2023.101001
[22] R.Shenbagalakshmietal.,“Adaptivespeedcon‐trolofBLDCmotorsforenhancedelectricvehi‐cleperformanceusingfuzzylogic,” Scienti ic Reports,vol.15,2025,12579.https://doi.org/ 10.1038/s41598‐025‐90957‐6
Thearticleentitled“SimulationStudyofShipVibrationRegenerationSystemUsing6‐DoFGough‐StewartParallel Robot”writtenbyAnhNguyenDucandNguyenQuangVinhpublishedinJournalofAutomation,MobileRoboticsand IntelligentSystems,Volume18,No2,2024,page24–30,DOI:https://doi.org/10.14313/JAMRIS/2‐2024/10was retracted.
Thisarticlehasbeenwithdrawnattherequestoftheauthors.TheauthorsinformedtheEditorialOf icethatthe authorlistrequiresrevisiontoaccuratelyre lecteachcontributor’sroleandcontributiontotheresearch.Toensure transparencyandupholdauthorshipethics,theauthorshavedecidedtowithdrawthemanuscriptwhiletheyaddress thismatterinternally.
TheEditorialOf iceacknowledgestheauthors’integrityandtheircommitmenttomaintainingethicalstandardsin scholarlypublishing.
ThePublisherregretsanyinconveniencecausedtoreadersandappreciatestheunderstandingoftheacademic community.