l
Una experiencia inmersiva multidimensional para la documentación y intervención virtual sobre el patrimonio cultural
Un’esperienza immersiva multidimensionale per la documentazione e interventi virtuali sul patrimonio culturale
Tesis de Grado en Ingenieria Edil y Arquitectura
Università degli Studi di Salerno - Universidad Nacional de Córdoba



Laurea Magistrale in Ingegneria Edile-Architettura
A. A. 2019/2020
Candidato: Vindrola Pedro Gabriel
Matricula: 0660100821
Relator: Prof. Barba Salvatore
Corelator: Prof.ssa Messina Barbara
Prof. Alfonso Santoriello
Prof. Roberto Ferraris
Ing. Marco Limongiello
“ ”
A mi Cuca, ahora desde el más allá...
0.0 Índice-Abstracts
1.0 Descripción general
2.0 Introducción
3.0 Métodos-Interpretación
4.0 Resultados-Discusión
5.0 Conclusión
6.0 Citas-Agradecimientos
º
Índice 6-7 Resumen y Abstract 8-9 Descripción 12 Objetivos 13 Sitio de estudio 14-19 Marco teórico 22 Escaneo laser 23-25 Fotogrametría 26-27 Conceptos básicos de aoftwares 3D 28-30 Texturización y luz 31-39 NIVEL I 44-59 Escaneo laser 45-47 Completamiento mesh 48-50 Texturización y vertex color 51-59 Legajos gráficos 96-101 Reconstrucción 102-109 Conclusiónes y perspectivas futuras 112 Conclusioni e perspettive future 113 Bibliografía 116 Sitografía 117 Agradecimientos 118-119 NIVEL II 60-71 Fotogrametría: Generación de datos 61-63 Procesamiento de datos 64-71 NIVEL III 72-93 Reconstrucción 73-75 Hipótesis recontructivas 76-81 Modelación 82-86 Texturización final 87-93
Resumen
Nuestra sociedad se ha ‘convertido’ en esa que muchos definen como la sociedad de la información y el conocimiento, gracias a la fusión entre la tecnología y la comunicación. Este trabajo propone aprovechar los espacios virtuales, los que otorgan una infinita cantidad de posibilidades infográficas, para estudiar nuevas maneras de como generar y concebir las intervenciones arquitectónicas, sin impacto sobre nuestro patrimonio histórico.
A propósito, se ha probado y utilizado un software propio del ámbito de la animación y simulación virtual de eventos multidimensionales. Las motivaciones que me decidieron a probar el uso del software en la arquitectura fueron: por un lado observar la necesidad de este ámbito; y por otro desde un punto de vista pragmático utilizar todos instrumentos y efectos típicos del ambiente de la animación para poder despertar la atención del observador en diferentes circustancias y momentos temporales, en fin para producir un resultado gráfico que invite a la reflexión de nuestra
sociedad acerca de la tutela del patrimonio cultural. El objetivo fue, sensibilizar e interesar a las personas sobre la arquitectura histórica, sobretodo a los jóvenes y niños. Evidenciando varios aspectos, desde como esta hecho hoy, como fue en el pasado y como último proponer proyectos futuros provocativos e innovativos que impacten la obra solo virtualmente.
La razón de estos pasos es de utilizar el espacio virtual, ofrecido y vacante gracias a las actuales tecnologías informáticas gráficas, para poder proyectar y discutir cambios que puedan en alguna manera influir el patrimonio cultural, que de otra manera no sería posibles prefigurarlos.
Este estudio, con un representación - ¿más audaz y transgresora? - es, también la consecuencia de la necesidad de incitar el debate entorno a la necesidad de transformar, o no, los espacios históricos que habitamos.
La nostra società si è ‘convertita’ in quella da molti definita come la società dell’informazione e della conoscenza, a significare la fusione tra la tecnologia e comunicazione. Questo lavoro cercherà di sfruttare gli spazi virtuali, i quali propongono infinite possibilità infografiche, per studiare nuove forme su come generare e concepire gli interventi architettonici, in senza di impatto sul nostro patrimonio storico.
Allo scopo è stato implementato un applicativo software noto nell’ambito dell’animazione e simulazione virtuale di eventi multidimensionali. Le motivazione che ci hanno spinto a un suo test in ambito architettonico sono: banalmente e principalmente, per poter sfruttare al massimo tutti gli strumenti e gli effetti di animazione, visuali e di simulazione fisica; poi, per poter focalizzare l’attenzione sulla rappresentazione del patrimonio in diverse circostanze e momenti temporali; infine, per produrre un risultato grafico che possa essere di utile riflessione per la nostra società circa la
tutela del nostro patrimonio culturale. Un obiettivo è, infatti, sensibilizzare ed interessare le persone a più architetture storiche, anche minori, evidenziando vari aspetti, dalla consistenza attuale, la sua immagine nel passato e financo restituire progetti provocatori ed innovativi che impattano solo virtualmente con il manufatto.
Il senso di questi step è quello di utilizzare lo spazio virtuale, offerto dall’attuale tecnologia dell’informatica grafica, per progettare e discutere cambiamenti che possano in qualche maniera incidere sul patrimonio culturale, che diversamente non sarebbero prefigurabili con altri mezzi.
Questo studio, verso una rappresentazione – più audace e trasgressiva? – è anche la conseguenza della necessità di mai sottacere il dibattito intorno alla necessità di trasformare, o no, gli spazi storicizzati che abitiamo.
Abstract 9
1.0
Descripción general
D escripción
El trabajo final de tesis desarrolla de una manera empírica la forma de trabajar y mostrar en los espacios virtuales el patrimonio cultural. Proponiendo hacer experimentos, sin intervención real sobre el caso de estudio, en todas las fases históricas precedentes o futuras
Para luego desarrollar una representación visual y didáctica; que permita contara la sociedad la historia del objeto de estudio a la sociedad, mostrar cómo actúa y piensa el ambiente académico sobre la historia para llegar a conclusiones.
En este trabajo experimental se utilizará una tumba encontrada en la necrópolis de Pontecagnano, con una especial potencialidad para mostrar lo deseado, dado que se desconoce como estuvo hecha y no hay antecedentes históricos precedentes que guíen su verdadera forma.
Toda intervención, aunque sea virtual, debe partir de un relevamiento de lo existente, del conocimiento del objeto del estudio. Por esto los primeros “niveles” de la tesis están enfocados en el relevamiento
arquitectónico con diferentes métodos. El Nivel I se trata del trabajo sobre el relevamiento en Escaneo Laser; el Nivel II refierie a la Fotogrametría.
Por último, el Nivel III se focaliza en el procesamiento de datos provenientes de los dos niveles anteriores (I y II), para generar un legajo de datos e hipotetizar una reconstrucción historica de la tumba 9890
(Siglo III a. C.) de la necrópolis de Pontecagnano. Resumiendo en este nivel se generará el espacio virtual para el trabajo y estudio de esta obra del patrimonio histórico italiano.
David Hume.
“Cada solución da pie a una nueva pregunta”
Objetivos
Con el trabajo de tesis se pretenden alcanzar los siguientes objetivos:
-Divulgar los espacios virtuales para la edición de información de patrimonio histórico. A partir de la utilización de herramientas ajenas al ámbito de la Arquitectura.
-Conocer una metodología rápida, eficaz y precisa, para realizar el levantamiento gráfico de objetos arquitectónicos por medio de la Fotogrametría Digital y el Escaneo Laser.
-Fomentar la utilización de sofwares para innovar en la presentación de los proyectos.
-Desarrollar una gráfica potente que acerque y sensibilice a la sociedad a sus patrimonios históricos.
-Mostrar como actúa e hipotiza el ambiente académico y estudioso especializado del ambiente sobre el patrimonio histórico.
-Estudiar los resultados obtenidos por métodos convencionales y no convencionales.
- Analizar y aplicar las nuevas herramientas al estudio del relevamiento de objetos de la Arquitectura histórica, específicamente al análisis de la tumba 9890.
-Obtención de resultados útiles y didácticos para el usuario universal de los museos.
-Contar historias y procesos que sufre la arquitectura a partir de experiencias visuales.
-Seguir promoviendo y demostrando que la interdiciplinaridad, enriquece los productos resultantes.
1 3
S itio de estudio
Pontecagnano Faiano es una comuna de 27.000 habitantes en la provincia de Salerno, Región de la Campania, al Sur de Italia.

La ciudad cuenta con una necrópolis con tumbas de diversas épocas y diferentes civilizaciones que datan desde la edad del Bronce (Periodo de la prehistoria
1700 a. C - 800 a. C.)
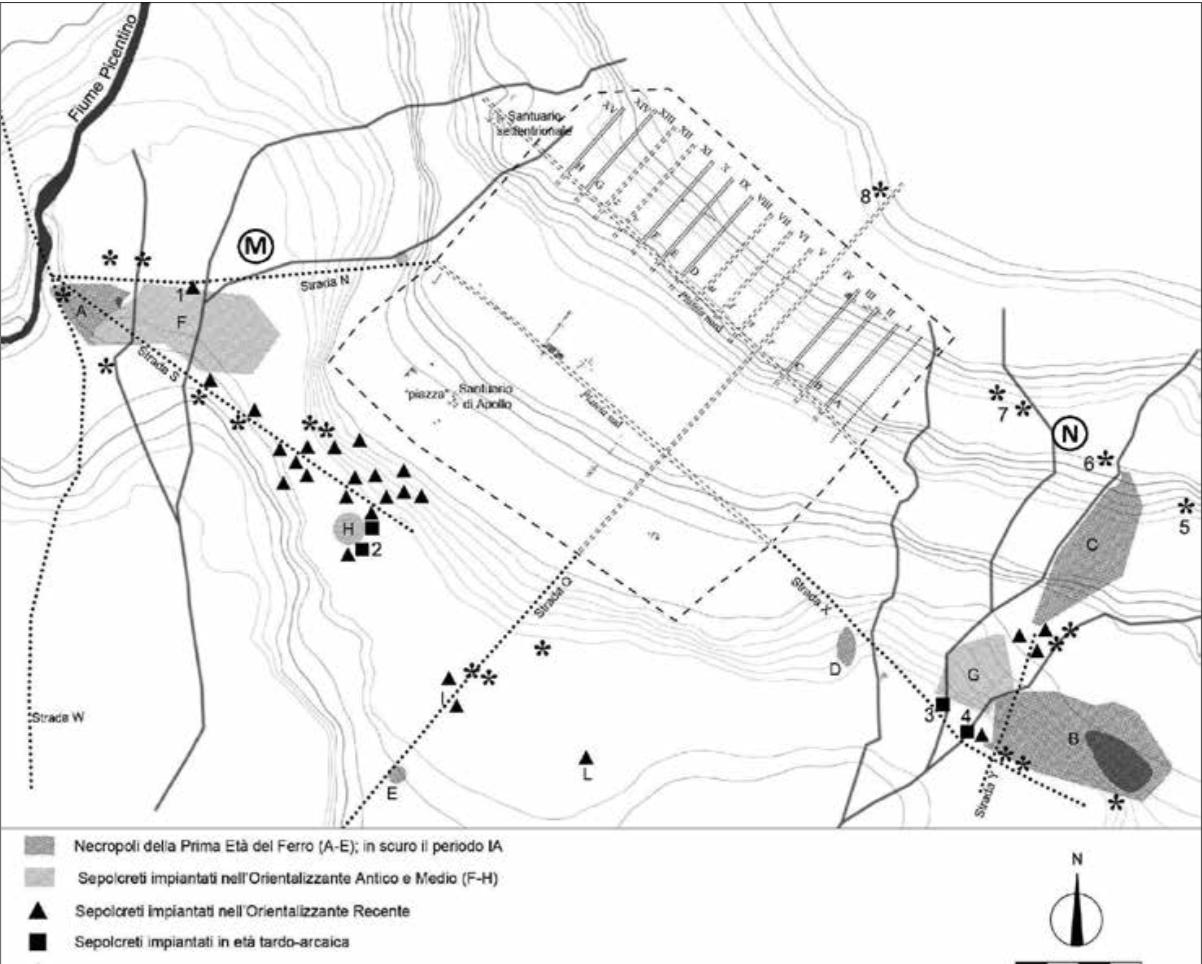
La tumba 9890, la cual es el objeto de estudio en este trabajo, forma parte de la necrópolis del centro etrusco-campano que cuenta con más 10.000 tumbas. Estas pertenecen a la época Samnita de la Campania. Grafico nº 1.02.
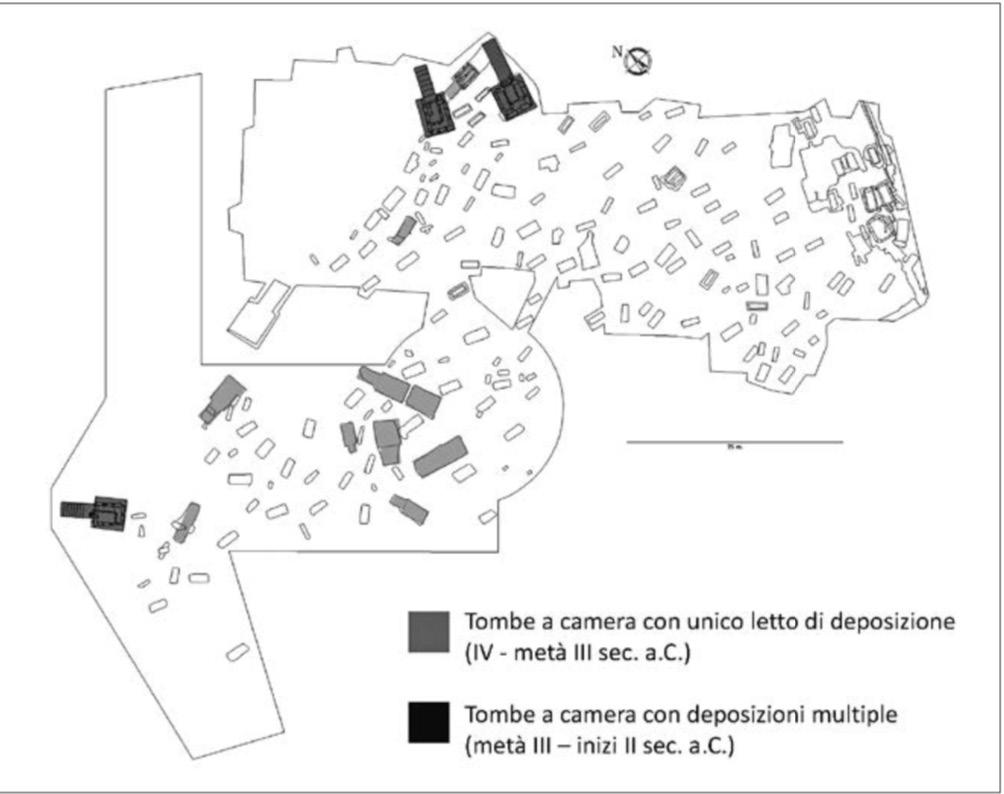
En una reciente investigación, año 2017, del sector noroeste de la necrópolis se encontraron “235 entierros distribuidos a lo largo de un arco cronológico entre finales del siglo V y principios del siglo II a.
C.” L. Tomay en “Dal centro Sannitico a
Picentia: La Necropoli di Pontecagnano in Via Raffaello Sanzio”
Dentro de esta excavación se individualizaron diferentes tipologías de tumbas
Gráfico nº1.0.1 - Ubicación de Pontecagnano Faiano, Campania (Italia) - Fuente: www.googlemaps. com
Gráfico nº 1.0.2 - Con un óvalo se individua la zona de excavacion - Planimetría de la Necrópolis de Pontecagnano - Annali della Fondazione per il Museo «Claudio Faina», Volume XXV Scavi D’Etruria.
familiares o singulares. Dentro de estas son menos numerosas las tumbas infantiles, pero estas con gran cantidad y calidad de objetos.
Alguno de los sepulcros de este sector fueron saqueadas antiguamente, muchas inclusive hasta los muros, pero la tumba 9890 se encuentra en un buen estado de conservación, exceptuando la cobertura y casi una hilera de ladrillos.
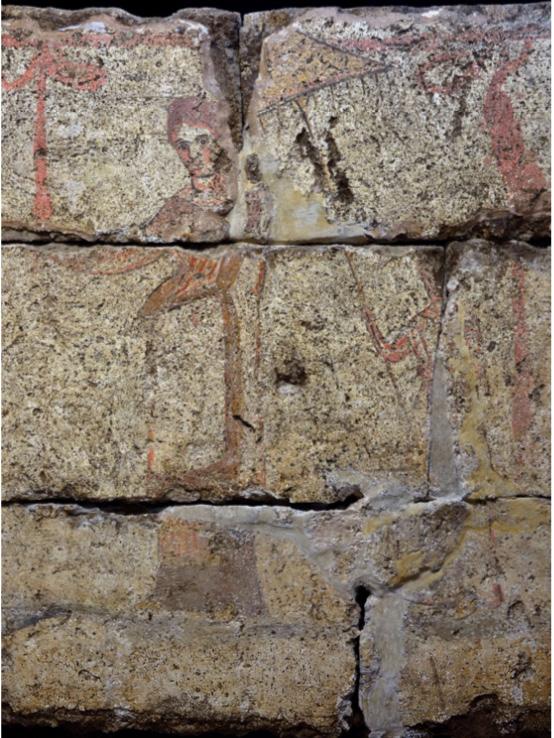
La tumba 9890 “se distingue de los demás por la presencia de una decoración pintada, hecha sobre una fina capa de yeso, que se extiende sobre la superficie lisa de los bloques de travertino. Los colores utilizados son rojo, negro y amarillo. Parcialmente conservada in situ, fue un marco formado por una tira y una garganta recta, decorada con óvulos alternados de rojo y negro. Las paredes laterales, de las cuales carece la fila superior de bloques, están decoradas en la parte superior con un friso continuo de pergaminos rojos seguidos de un gran registro con cortinas rojas y negras..” L. Tomay 2018.
Gráfico nº1.0.3 - Con un óvalo se individua la zona de la tumbas - Sector Noroeste de la Necrópolis - Annali della Fondazione per il Museo «Claudio Faina», Volume XXV Scavi D’Etruria. Edizioni Quasar 2018.
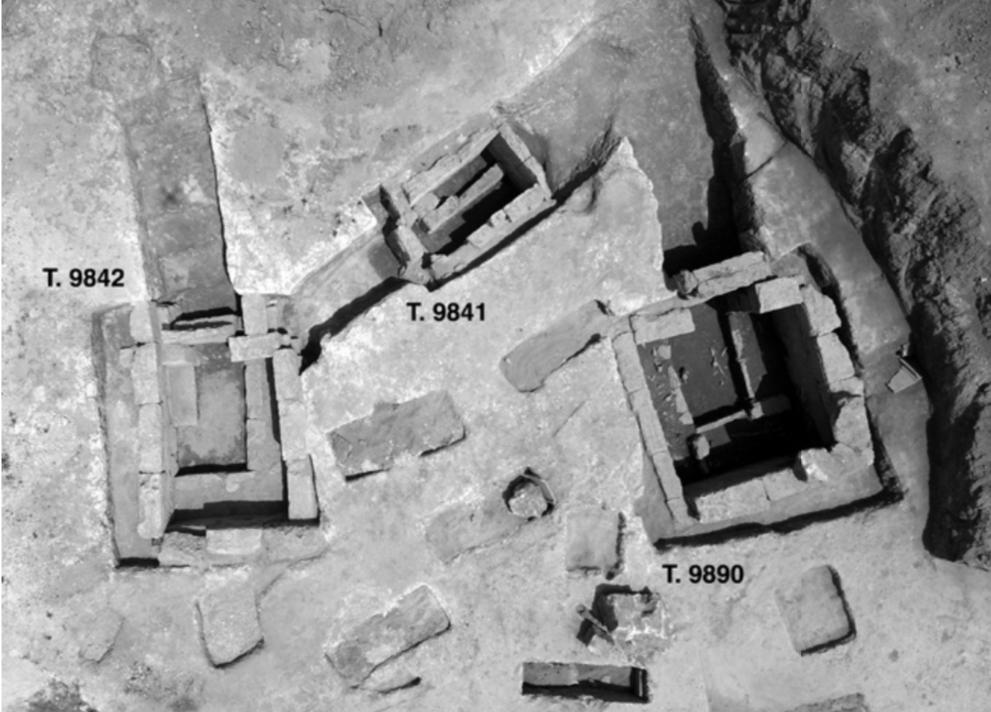
Gráfico nº1.0.4 - Foto aerea zona de la tumba 9890 - Annali della Fondazione per il Museo «Claudio Faina», Volume XXV Scavi D’Etruria. Edizioni Quasar 2018.
1 5 1 5
El ingreso a la 9890, poseía un dromos1 en rampa hasta la entrada que estaba cerrada con tres bloques de travertino perpendiculares al dromos. Como ya he indicado anteriormente no se pudo conservar el cerramiento horizontal de esta. Las paredes, también de travertino, presentan 4 filas de bloques a excepción de la pared de la derecha (desde la entrada), a la que le falta la superior.
En la construcción se observan 3 camas, se les llama “camas” gracias a la disposición de los huesos que utilizaban los bloques de travertino del suelo análogamente como almohadas. En estas camas fueron enterrados en el de la izquierda un hombre, el de enfrente a la entrada también se encontraron restos de género masculino, sólo que se hallaba otro cadáver debajo de este último que se cree que era de sexo femenino. En la cama de la derecha los restos eran de una mujer adulta. Además de los huesos, como verán en las fotos, se encontraron gran cantidad de
1Del griego, entrada a un edificio.
objetos que ayudaron la identificación del género de los cadáveres.
La cronología de los materiales recuperados, coloca a la construcción “entre la mitad del III y el final del III - principios del II Siglo a. C., indica un uso de la tumba durante cincuenta años”; como lo indica
L. Tomay en “Una Tomba A Camera Con Decorazione Dipinta Da Pontecagnano, 2020”. Las decoraciones pintadas fueron hechas sobre un leve estrato de revoque.
“Las paredes laterales están decoradas en la parte superior con un friso continuo de pergaminos rojos, seguido de un gran registro con cortinas rojas y negras”. Pero la pared más interesante a describir es la que se encuentra en frente a la entrada, que presenta “una escena figurativa en la que los personajes están definidos por una línea de contorno negra: a la derecha, una pequeña figura femenina, vestida con una larga túnica blanca ajustada en la cintura con cortinas rojas, camina hacia la izquierda; ambos pies, perfilados, descansan en el suelo solo con los dedos de los pies y
1 6


1 7
Gráfico nº1.0.5 - Foto panorámica de la tumba, día de la excavación, tomada con escaneo laser.
Gráfico nº1.0.6 - Foto panorámica del sitio de la tumba, día de la excavación, tomada con escaneo laser.
tienen el calzado en amarillo ocre con un lazo negro”.
La tumba luego de la excavación se movió al museo para tenerla en un ambiente menos agresivo para sus pinturas y así poder hacer un estudio en profundidad de ellas y sus significados.
Cito a continuación a la Arqueóloga L. Tomay en la explicación de las pinturas “La figura sostiene una sombrilla en su mano derecha, para proteger la cabeza de una mujer colocada frente a ella. Esta última extiende su brazo derecho hacia un personaje masculino que enfrenta. El hombre, sin barba y con espeso cabello negro, al igual que la mujer, está representada por tres cuartos con la cara en perspectiva y en el acto de extender su brazo derecho hacia ella . A la izquierda, otra figura masculina cierra la escena. El hombre lleva una túnica blanca corta con una falda plisada; sobre sus hombros probablemente lleve una capa ocre. Una banda roja enmarca la escena de arriba; dos grandes guirnaldas rojas y vendajes parten de ella a la derecha
y a la izquierda de las dos figuras principales respectivamente, dos de las cuales se cruzan con las guirnaldas.
En el centro entre los dos protagonistas hay otras dos vendas que descienden de una especie de lazo rojo. La mujer tiene cabello con separación central y un tocado rojo oscuro que no es fácilmente identificable debido a la brecha presente en la placa en este punto; la expresión facial es intensa, marcada por grandes ojos negros y reflejos rosa-naranja.
Las figuras descansan sobre una banda ondulada negra que, como se ha dicho, corre por todas las paredes de la habitación.
La composición de la escena, y en particular la reunión de los dos personajes que extienden sus manos, evoca algunas pinturas funerarias etruscas, samnitas, daunianas y lucanas del siglo IV-III a. C., donde el difunto recibido en el Hades por sus antepasados está representado o su acompañamiento al más allá por un personaje conectado al otro mundo”.
1 8
Gráficos nº1.0.7 a,b,c,d - Fotos de la tumba en el museo, escena descripta. - “Una Tomba a camera con decorazione dipinta da Pontecagnano“, de Luigina Tomay.



1 9 a b d c
2.0
Introducción
Marco teórico
A continuación en este capítulo se explicará los conceptos básicos para entender la metodología que se utilizó.
Este apartado esta hecho en función de la metodología, por lo tanto se divide en 3 partes al igual que la misma. Las 3 partes o niveles de la metodología son:
1) Escaneo laser.
2) Fotogrametría.
3) Reconstrucción.
Respectivamente este fase primero se desarrollara el Escaneo Laser el instrumental utilizado, su funcionamiento y una sintesis de la teoría para su comprensión.
Luego la segunda fase se explica la teoría, el vocabulario, el funcionamiento y los pasos necesarios para generar una fotogrametria. En esta sección no se explica el instrumental utilizado, como en el Escaneo Laser, dado que fue parte del trabajo de la tesis se desarrolla en el capítulo de metodologías.
Como último se hace una introducción a los softwares de modelación que fueron utilizados para la reconstrucción hi-
potética. En esta etapa se muestran las bases conceptuales para entender la simulación generada y el trabajo producido para llegar a tal objetivo.
Escaneo laser Fotogrametría
de modelación
Marco
teórico Reconstrucción Legajo gráfico Softwares
Resultados
Escaneo laser
El escaneo laser es un instrumento de alta precisión y detalle que permite obtener una restitución tridimensional de los objetos o los espacios en períodos breves de tiempo.
Esta herramienta nos permite hacer capturas de grandes cantidades de información de todo tipo de geometrías, con todo tipo de complejidades. Estos aspectos son los que le permitieron inserirse con facilidad en el ambiente del relevamiento arquitectónico, sobre todo enfocado al estudio del patrimonio cultural.
El escaneo laser se considera un instrumento óptico activo1, “su principio de funcionamiento se basa en la detección de la posición espacial de las coordenadas X,Y,Z de los puntos que componen las superficies del objeto a relevar a través del principio denominado “tiempo de vuelo”.
El instrumento posee un laser que releva los puntos en el espacio y este, en conjunto con un cronómetro (que es encargado de medir el tiempo que tarde el haz de luz en ir hasta el objeto y volver) ubican
1 Instrumentos ópticos activos: en contraste con los instrumentos ópticos pasivos, los instrumentos ópticos activos requieren una fuente luminosa propia.
la distancia de los datos relevados a partir de resolver la simple ecuación.
Tiempo = Velocidad x Distancia
Este rayo de luz es reflejado y direccionado por dos espejos que son los encargados de lograr la cobertura de 360º del espacio a relevar. Además de esto, los faros1 posee una cámara integrada al propio sensor que toma fotos en paralelo de los puntos relevados para obtener la información de color del objeto.
Para una reconstrucción total de un objeto se necesitan múltiples relevamientos. Cada nube de puntos generada por el faro posee sus propias coordenadas parciales y, dado que son el mismo objeto, se de deben alinear todas para pasar a un sistema de coordenadas generales único.
El encargado de esto es un software específico (Scene) que lee las nubes de puntos y a partir de esferas posicionadas en la escena o puntos, que el usuario indica que se encuentran en más de una nube de puntos (Tie Points), procede a alinear
1 Mención frecuente en el ambiente arquitectónico.
2 3
las diferentes tomas, mientras más Tie points se indiquen menor será el error de alineamiento.
Una vez alineadas todas las nubes de puntos se obtiene el modelo final completo, que con este se puede seguir procesando para obtener texturas, mesh, etc..
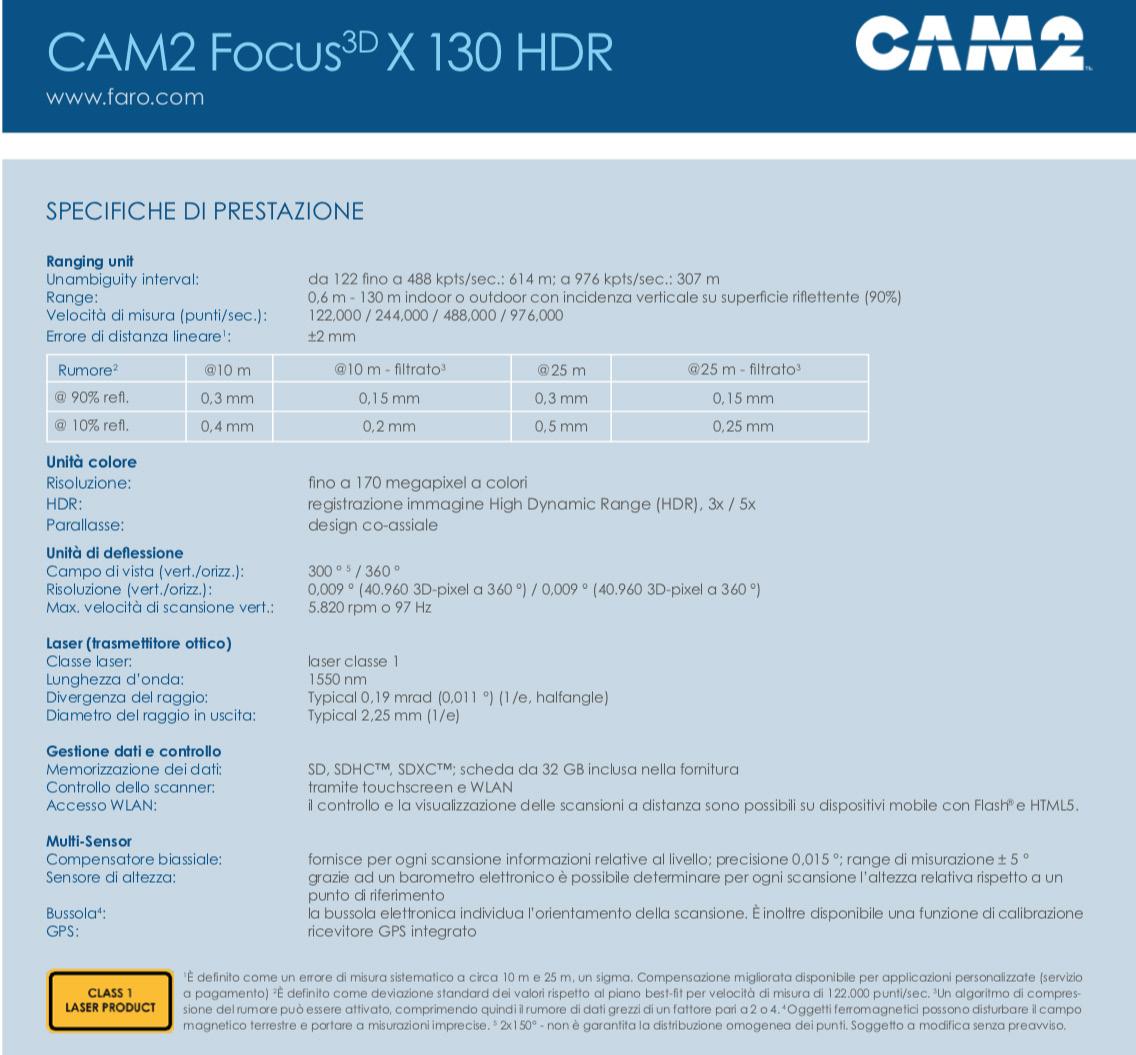
El relevamiento de Escaneo Laser para este proyecto fue ejecutado por el Laboratorio Modelli de la Università degli Studi di Salerno. Se utilizo un CAM2® Laser Scanner Focus3D X 130 HDR:
El nuevo escáner láser CAM2 Focus3D X 130 de la serie X es un potente escáner 3D de alta velocidad que proporciona resultados de escaneo realistas que son extraordinariamente fieles a los detalles.
El Focus3D X 130 HDR ultraportátil permite mediciones rápidas, simples y precisas de fachadas, estructuras complejas, plantas de producción, sitios de accidentes y componentes grandes. Al combinar la tecnología de escaneo de alta precisión con movilidad y facilidad de uso, el dispositivo garantiza confiabilidad, flexibilidad
y la capacidad de ver los datos grabados en tiempo real. Los datos de escaneo 3D pueden importarse fácilmente en todas los software comúnmente utilizados para la reconstrucción de patrimonio y obra de los sectores de arquitectura, ingeniería civil, construcción, producción forense e industrial.
Con una autonomía de 4.5 horas, el escáner láser también ofrece un alto nivel de flexibilidad y autonomía. El bajo peso, el tamaño pequeño y la tarjeta SD hacen que el escáner sea verdaderamente móvil. (Descripción del instrumento por el vendedor: http://www.3dtarget.it/eu/images/ stories/virtuemart/product/3DT-FARO_ X130_hdr.pdf).
2 4
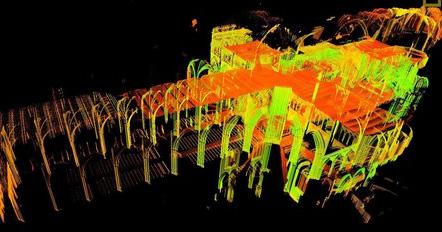
Gráfico nº2.0.1 - Ejemplo de relevamiento con escaneo laser de Notredame.
2 5
Gráfico nº2.0.2 - Ficha técnica del escaneo laser utilizado para el relevamiento.
Fotogrametría
Etimológicamente, la palabra fotogrametría procede de “phos”, “photós“, luz; “gramma”, trazado, dibujo; y “metrón”, medir. Entonces, se define a la Fotogrametría: como la ciencia que estudia, mide e interpreta a partir de fotos, las características geométricas, de coloración y materialidad del caso de estudio.
Por otro lado la Sociedad Americana de Fotogrametría y Teledetección (ASPRS) define a la fotogrametría como: “el arte, ciencia y tecnología para la obtención de medidas fiables de objetos físicos y su entorno, a través de grabación, medida e interpretación de imágenes y patrones de energía electromagnética radiante y otros fenómenos”.
La fotogrametría se divide en diferentes etapas:
1- Obtención de imágenes
2-Alineamiento de imágenes y Sparse point Cloud.
3-Dense Cloud
4-Build Mesh
5-Build texture
1- Esta etapa de campo, es de vital importancia porque una errónea toma de fotos o insuficiente calidad de las mismas perjudica la precisión de todos los pasos siguientes. Por lo tanto se puede decir
que depende del operador y es la fase fundamental.
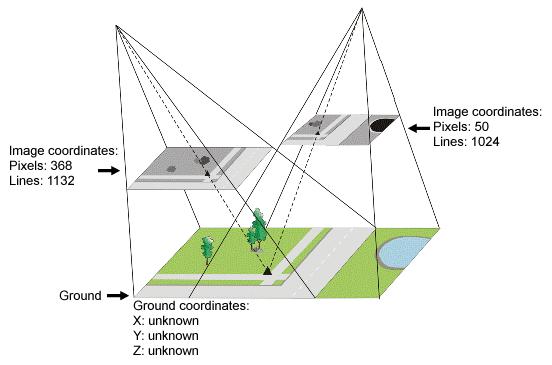
2- La etapa de alineamiento de fotos la hace automáticamente por el software pero es facilitado por un plan de cómo se capturan las imágenes. La etapa de Sparse
Point cloud es una nube de puntos inicial donde el software calculó los “Tie Points” (puntos que se encuentran en más de una imagen) que sirven para conocer la posición de la cámara en el espacio y la distancia al objeto en cada captura.
3- Una Dense Cloud point que es un conjunto de datos de puntos en el espacio que sintetizan la superficie externa de un objeto. Gráficos nº2.04 y 2.05.
Gráfico nº2.0.3 - Ejemplificación de un Tie pointhttps://www.pcigeomatics.com
Tie Point
4- Build Mesh, en esta etapa se genera una mesh o “Una malla poligonal es una superficie creada mediante un método tridimensional, generado por sistemas de vértices posicionados en un espacio virtual con datos de coordenadas propios”1. Existen diferentes tipos de Mesh, que varían según la cantidad de caras de polígono que define la geometría. Una mesh de triángulos será más pesada que una mesh descrita por cuadrados, dado que va a tener mayor numero de aristas. Esta diferencia es utilizada por softwares que hacen decimate2 para aligerar los modelos y ser procesados con mayor agilidad por los softwares.

5- Build Texture, es la última etapa, es un modo de mapeo generalizado que permite parametrizar la textura. El software no hace suposiciones de cómo es la textura ante la falta de información, por lo tanto ante la falta de información en un lugar se homogeneizará la textura con el entorno inmediato.

1 Defincion citada de www.agisoft.com/forum.
2 “Decimate” es reducir significativamente el número de caras al costo de perder calidad en el modelo.
Gráfico nº2.0.4 - Ejemplificación Dense Cloud Point, Tumba Potencagnano.
Gráfico nº 2.0.5 - Zoom Grafico nº3Tumba Potencagnano.
2 7
Conceptos básicos de softwares 3D
Cualquier objeto esta generado por un número finito de “faces”, cada una está estratégicamente situada en el espacio para explicar el objeto. Cada “Face” está compuesta por ejes o “edges” que definen su posición, área y dimensiones; a la vez cada eje se desarrolla gracias a dos puntos o “points” que definen todas las variables de la recta.
En el caso de figuras geométricas de caras de más de tres ejes, los Softwares informáticos leen estas caras, y las descomponen en una composición de triángulos que forman la superficie (o como lo nombran los programas del ámbito “tris” de triangles). Esto último vale la pena aclararlo para entender como es el procesamiento de los datos de este tipo de programas y la cantidad de información que procesan. En el gráfico 2.0.6 se ve como un cubo equilátero posee 8 vertices, 12 edges, 6 faces y 12 tris.
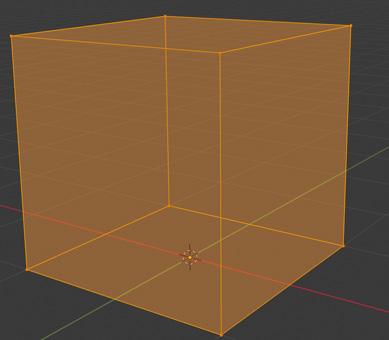
Con la información de estos triángulos no sólo se define la posición de la geometría, sino que da el dato fundamen-
tal para los materiales y las texturas: la normal. Esta última, la normal, es la que define todos los comportamientos respecto a la simulación de luz que tienen los materiales, por ejemplo: reflection, emission, diffusion, roughness, el comportamiento del subsurface del material, etc.
Como ya he introducido en los conceptos básicos de geometría un software de modelado trabaja con un sistema de puntos interconectados en un espacio tridimensional con ejes de coordenadas X,Y,Z.
Gráfico nº 2.0.6 - Cubo rectangular - Blender.
Como se puede observar en los dos gráficos 2.0.7 y 2.0.8, el simple cubo del gráfico nº2.0.6, posee una cantidad de información por detrás pertinente para definir muchas cualidades del material y la geometría, donde:

-‘v’ es la posición de los vértices en x,y,z respectivamente.
-‘vt’ son las coordenadas de la textura en el espacio UV1.
-‘vn’ o vector normals, se ve que son 6, por lo tanto una por cara del cubo. Estas normales son perpendiculares a la cara, es una información del software para que proyecte correctamente la textura al lado pertinente. Ej. si la normal en este caso estuviese hacia el interior y nosotros le asignáramos un material al cubo, la textura se vería solamente desde el interior del cubo.
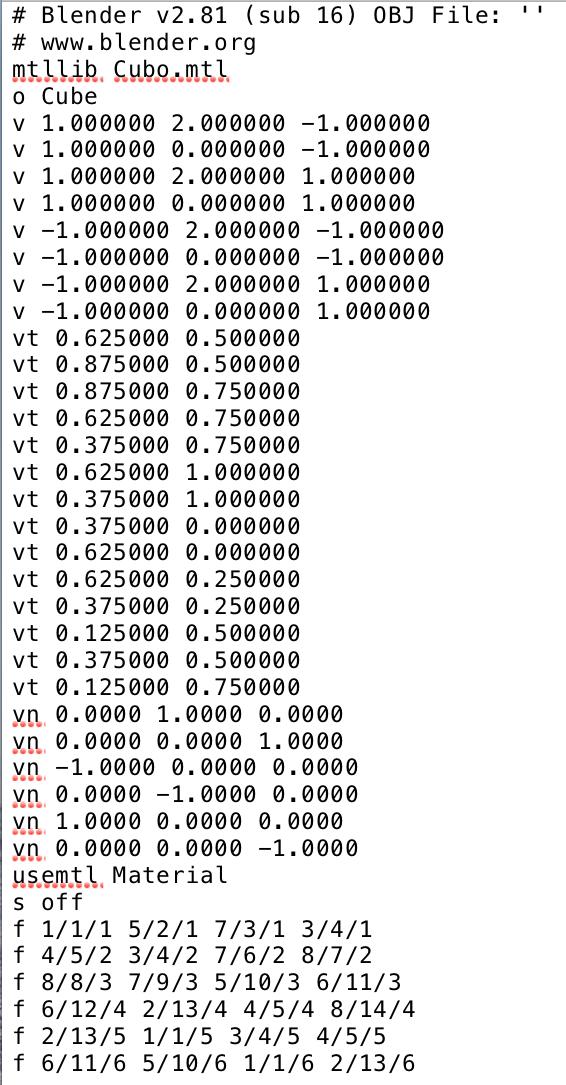
Gráfico nº2.07 - A la izquierda Cubo.obj abierto como formato Obj en visualizador 3D.
Gráfico nº2.0.8 - Arriba abierto el mismo cubo como formato de texto.
1 UV es un sistema de coordenadas paralelo al X,Y,Z que la mayoría de los softwares de modelación 3d poseen. Este sistema 2D se utiliza para las texturas.
2 9
Los formatos de exportación de los archivos 3D son claves para entender la razón y la diferencia entre exportarlos con diferentes extensiones, específicamente en los softwares utilizados en este trabajo de tesis.
Particularmente en esta sección se explicará la diferencia entre exportar un modelo en PLY, FBX, STL y OBJ con sus ventajas y desventajas.
Los ficheros conocidos como también FBX, es un formato de archivo que se mantiene todos los elementos, funcionalidad e información del archivo original, por lo que sirve como fichero para trabajar de manera compartida y simultánea entre varias aplicaciones de creación de contenidos 3D de diferentes desarrolladores.
Luego tenemos el formato STL, que es el formato utilizado casi unánimemente en el ambito de la impresión 3d, por su simplicidad y su reducido tamaños. Pero tienen como desventaja los archivos STL
codifican la geometría de la superficie sin representación de color o textura.
Luego poseemos los formatos PLY y OBJ que son conocidos y ampliamente utilizados por su capacidad para almacenar color y textura junto con otros detalles. Pero la diferencia entre uno y el otro es que el formato PLY tiene toda la información en un mismo archivo, mientras que el formato OBJ cuando se exporta se guarda con dos archivos un formato MTL y un formato PNG (imagen). El archivo con una extensión MTL contiene información de texto sobre patrones de textura utilizados en objetos adecuados (OBJ). Posee la información sobre los nombres de mapa de bits y su ubicación dentro de un proyecto y la distribución en un objeto 3D. Por lo tanto en el ámbito del relevamiento arquitectónico, particularmente en el trabajo con patrimonio histórico, es conveniente usar el formato OBJ dado que habilita la edición de la textura (archivo PNG) manteniendo toda la información de geometría y la posición de la textura gracias a las otras dos extensiones.
3 0
T exturización y luz
La parte sin duda más compleja del universo de los programas informáticos de modelación 3D, es la generación de texturas y la simulación de las mismas para acercarse a lo más posible a la realidad. Es primordial entender el comportamiento de la luz (en la realidad) y explicar porque los softwares 3D, que la simulan, son una mera aproximación.
Para generar, o mejor dicho simular, una textura es necesario tomar un material, el que sea, y convertir todos los valores que existen de este (brillo, color, roughness, reflexion, IOR1 , subsurface, etc) en valores matemático para que el software lo procese. Todas estas propiedades son como se relaciona este material con la luz que, al final de todo, es lo que vemos, dado que la oscuridad es la ausencia de toda luz.
Por lo tanto hay que explicar el funcionamiento de luz en la realidad y en los softwares, o mejor dicho las diferentes maneras que se aproximan estos a ella con cálculos matemáticos.
En la realidad la luz se emite de una
1 Indice of Refraction - Blender.
fuente de luz (el sol o una lámpara), como una onda que viaja por un medio (agua, aire, etc) y comienza a incidir y reflejarse por todos los objetos de una escena, iluminando y/o generando sombras en el ambiente. A su vez se observa, de una manera bastante intuitiva, que parte del objeto se encuentra iluminada o sombreada. La aproximación al problema se da a partir de la simulación de cámaras configuradas a voluntad que delimitan el foco de la escena deseada.
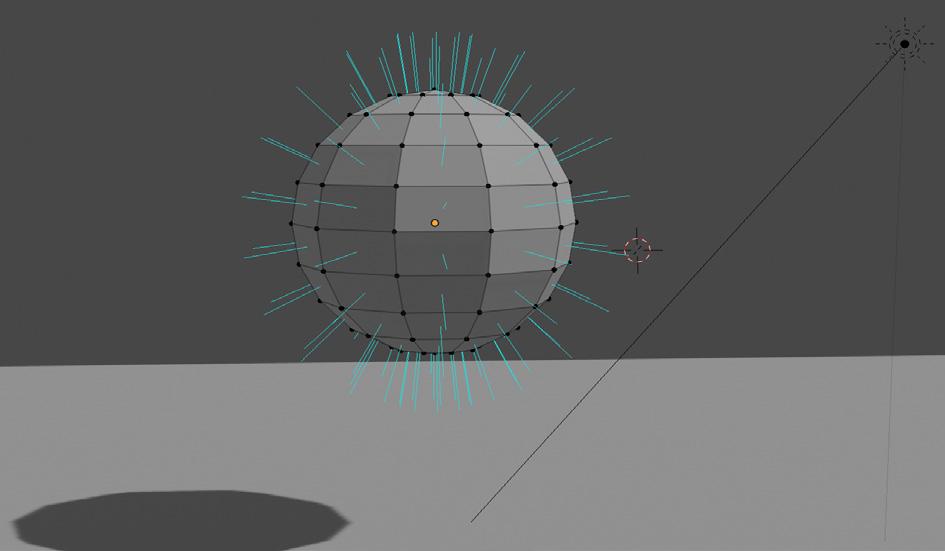
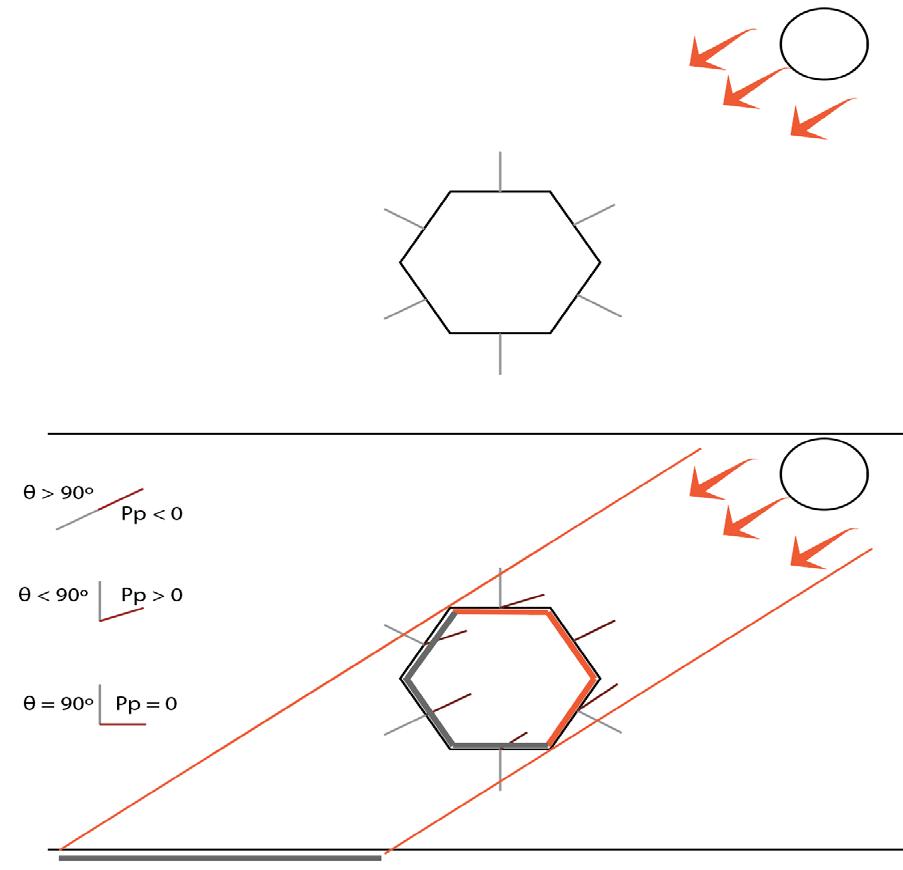
Existen dos tipos de resolución, el primero, rasterizado consiste en sacar un vector desde el inicio de la normal de la cara hacia la fuente de luz (si hay dosfuentes de luces, dos vectores).
3 1
Gráfico nº 2.0.9- Esquematizacion de Luz/sombra y sus normales - Blender.
Esta normal y vector con dirección a la fuente generan un ángulo, con este se hace un producto punto y se obtiene una relación numérica del 1 al -1. Si los valores son mayores a 0, las caras serán coloreadas del color de la fuente de luz, todos los puntos menores a 0 se sombrearan.
Los puntos donde el producto punto es igual a 0 que, a su vez coincide con el rayo tangente a la superficie del objeto, son los encargados de proyectar la sombra a otra superficie. Todos los productos puntos que dan 0, definen la sombra.
La otra manera que los softwares resuelven la simulación de la luz es realizando un Raytracing.
Raytracing intenta simular cómo se comporta la luz en la vida real. En la vida real la fuente libera fotones en todas las direcciones, los fotones se mueven por el espacio reflejándose y absorbiéndose con los objetos, sólo algunos llegan al observador. Inicialmente los softwares empezaron calculando todos estos fotones, pero muchos se pierden y no llegan a la cámara, insumiendo un tiempo de cálculo excesivo, por lo tanto poco efectivo. Luego se desarrollo la técnica del Raytracing que calcula a la inversa el proceso.
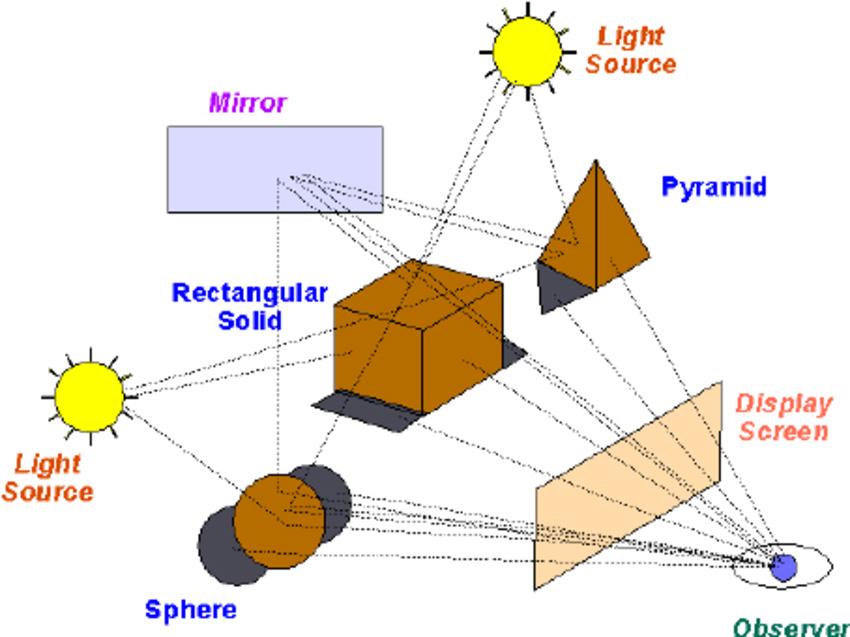
Gráfico nº 2.0.10 - Esquematización raster.
Gráfico nº 2.0.11 Esquematización raytracing.
3 2
Como se ve en el gráfico 2.0.11 los rayos no salen de las fuentes, sino que salen del observador. El concepto es tirar una cantidad X de rayos de luz por cada píxel de la pantalla.
Un rayo entra, se mueve por el espacio choca con un objeto, por ejemplo la esfera, en ese punto se genera otro vector hacia la o las fuentes de luz; y así saber que color tiene que ser en ese punto el objeto. Luego si ese material tenía un valor de reflexión, sale otro rayo para ver si ese último choca con otro objeto y, en caso de ser así, debe colorarse también del material reflejado. Esto puede continuar hasta llegar a la fuente de luz o se limita por configuración para aligerar el procesado y cálculo.
El procesado de este tipo de aproximación de la luz es mucho más lento al de Rasterizado, pero también se ve su diferencia en la calidad de las imágenes finales. Por una simple ecuación a calcular, si tenemos una imagen que deseamos de calidad
2048x1080px (2K). Equivalen a 2.211.840
píxeles, de los cuales un sampling de 80, significarían 176.947.200 rayos a calcular y suponiendo que cada rayo se divide un mínimo de 3 veces nos da 530.841.600 y suponiendo un bouncing en la imagen de hasta 7 veces como máximo y suponemos que sólo el 30% de estos llegara a 7 y los otros quedaron en 4 rebotes nos daría un número de:
((2048x1080)x80x3)x0.3x7 + ((2048x1080) x80x3)x0.7x4 =2.601.123.840 de ecuaciones a resolver y sólo para una imagen a una calidad intermedia de 2k.
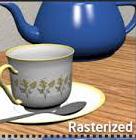
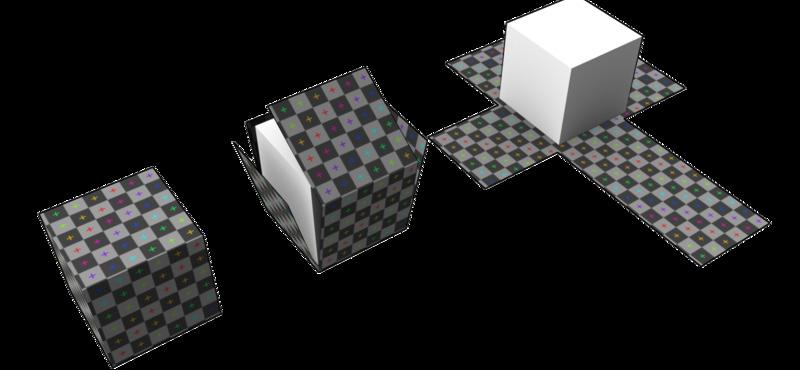
Hoy, con el avance de la tecnología, el Rasterizado cada vez se acerca más y más a la calidad del Raytraicing como se ve en las imágenes a continuación. En contraste las dos, se puede observar la diferencia en los reflejos de un material y las sombras arrojadas detrás de los materiales translucidos como las gafas. Las sombras en Raytracing se logran con mayor precisión. Las telas no tienen la misma definición, pero cuesta notar la diferencia en el caso de la personaje del videojuego.
3 3
En un ejemplo más claro como el del juego de té, donde el rasterizado tiene muchas menos horas de trabajo de estudio, las diferencias son más contundentes. Pero vale la pena aclarar que con un buen trabajo de estudio se alcanzan texturas de calidad semejante y se obtiene un material en tiempo real, aumentando la velocidad de procesado de resultados. Por estas razones expuestas, para este trabajo se utilizara el Rasterizado, dado a su mayor velocidad y que el material y su comportamiento con la luz no debe ser simulado, gracias al relevamiento.


Gráfico nº2.0.12 - Juego de té - www.nvdidia.com/.
Gráfico nº2.0.13 a,b - Cindi Final Fantasy VII - Comparaciones rasterized vs ray traced.
3 4
Una vez explicado cómo funciona la simulación y procesamiento de la luz en los softwares de modelación 3D, se puede explicar cómo es el programado de los nodos de texturas PBR1.
Según Julien Chauvier2 dependiendo de E-on Softwares especializado en técnicas de renderizado las texturas o materiales PBR son: ”En una frase ‘Physically based rendering of materials’. Pueden ser también llamados ‘physically based shading’ (PBS). Los materiales PBR nos permiten simular casi cualquier material existente - y hasta una mezcla de varios - con un formato simple, unificado y compacto.”
Luego explica en la entrevista que hay varias ventajas:
1) Ahora se puede usar un solo tipo de material para describir todos los habituales (dieléctricos difusos, brillantes y especulares, así como metales).
2) El formato es muy compacto, lo que significa que solo se necesitan unos pocos parámetros para descri-
1 Del ingles, Physically Based Rendering.
2 Entrevista https://info.e-onsoftware.com/blog/ what-are-pbr-materials
bir completamente todos los materiales posibles, loque lo hace muy adecuado para las aplicaciones en tiempo real.
3) Cada parámetro puede variar sobre el objeto texturizado (generalmente mediante el uso de texturas mapeadas con UV, que son muy adecuadas para motores en tiempo real). Esto le permite simular una mezcla de varios tipos de materiales utilizando un solo material PBR.
4)Aunque generalmente se basa en mapas de textura, el formato permite descripciones más complejas de los parámetros (como funciones de procedimiento, por ejemplo), haciendolo escalable en términos de complejidad y flexibilidad.
5) Al estar basados en física, encajan de manera agradable y natural dentro de los flujos de trabajo delas representaciónes generales.
6) Proporciona un flujo de trabajo consistente para los artistas, ya que
3 5
los materiales ‘physically based shading’ deben tener el mismo aspecto en todos los renderizadores en línea o fuera de línea compatibles. Los materiales se definen en grandes grupos glossys (materiales reflectivos), diffuse (materiales opacos), refraction (vidrios o líquidos) y emission (lámparas). Pero a su vez los materiales PBR tienen diferentes canales que se pueden editar que describen casi todos los materiales.
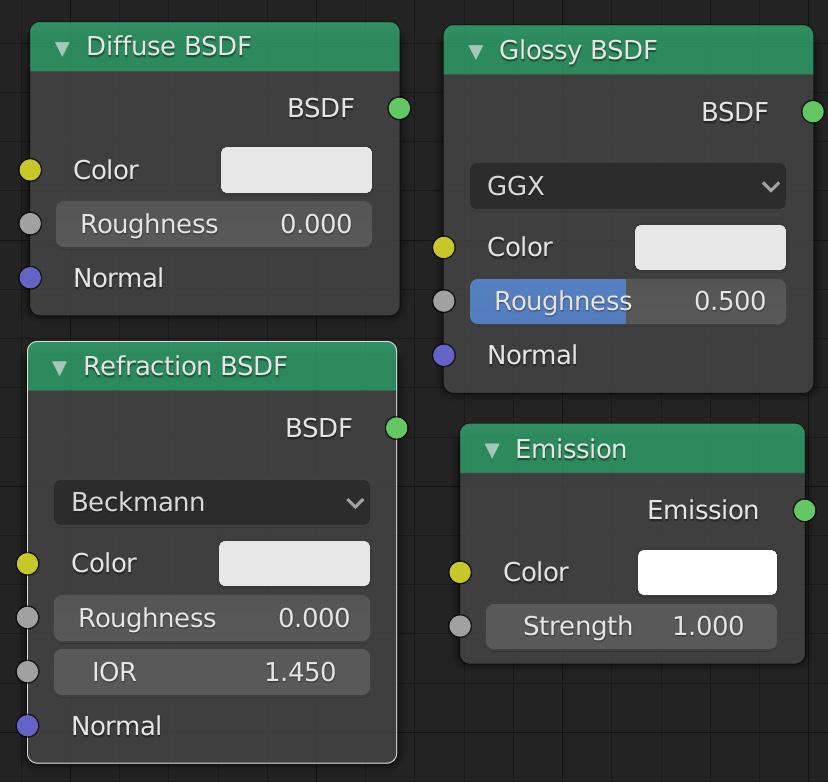
Para desarrollar las primeras funciones hay que explicar la información que se pueden cargar a cada valor. Los círculos amarillos piden información de Color (Color nodes), los violetas informaciones de vector (Vector Nodes), los Converter nodes o círculos grises que son valores numéricos y por últimos los verdes que son todo tipo de información, generalmente outputs.
El Base color, como dice es el color base del material y se le puede cargar información también de imágenes.
Subsurface, es una opción típica de materiales que poseen caracteristicas de translucidad y un color en el interno que
genera un comportamiento atípico de la luz, como por ejemplo la piel que iluminando es permeable a la luz y deja ver este comportamiento anormal de la luz.
Metallic con valores de 0 - 1 que define que tan metálico es el material.
Specular es la capacidad de un material de reflejar una iluminación del ambiente.
Roughness va de 0-1 y es una propiedad referida a la rugosidad y porosidad
3 6
Grafico nº2.0.14 - Shader básicos de Blender 2.82.
de la superficie, afectando su comportamiento en los otros atributos del material.
Ej. si un espejo de Roughness le bajamos de 1 a 0 no dejara de reflejar, sino conceptualmente los rayos de luz se divide en millones, haciéndolo imperceptible a la vista.
Anisotropic controla el aspecto del reflejo especular. Al igual que specular, Specular Tint y Anisotropic Rotation son raramente utilizados. Solo se utilizan para casos muy específicos.
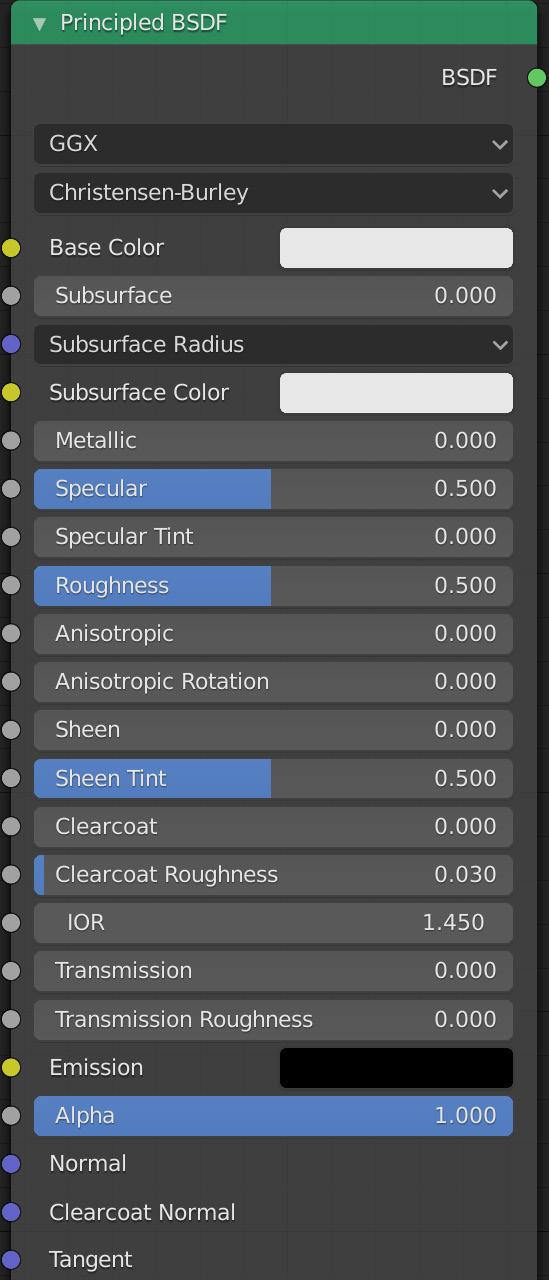
Sheen, Sheen tint son cualidades típicas de tejidos (cloths).
Clearcoat y Clearcoat Roughness, se utilizan para generar laminas sobre materiales, por ejemplo una laca sobre una madera.
IOR, index of refraction/reflaction of the light, capacidad de un material expresada en un valor numérico de reflejar la luz o refractar la luz.
Transmission y Roughness, es el comportamiento de la luz dentro del material en relación a la forma del objeto. Es
3 7
Gráfico nº2.0.15 - Shader base de Blender.
decir, si se separan o se unen los rayos de luz al pasar dentro del material.
Emission, utilizado para lámparas o fuentes de luz.
Alpha es utilizado para darle opacidad o transparencia al material utilizado
Normal es utilizado para usar mapas de normales, o sea mapear la textura para darle relieve sin editar la morfología del objeto donde se aplica la textura.
Además de las herramientas básicas hay nodos, que aplican cálculos matemáticos, aleatorizan resultados, multiplican, editan colores, modificación de contraste, brillo, saturación, etc. Todo esto amplía el campo de trabajo de los diseñadores y artistas para obtener calidades fotorealísticas.
El ejemplo del próximo gráfico demuestra una programación de nodos para lograr una imagen similar a una foto.

3 8
Gráfico nº 2.0.16 - “Procedurally texturing meat balls in Blender” by TOPCHANNEL1ON1 - https://www. blendernation.com/.
En síntesis los softwares que nos permiten generar y trabajar en los espacios virtuales multidimensionales, dan la posibilidad de generar un ambiente de investigación de escenarios reales, o no, a través de simularlos, siempre y cuando los aspectos físicos en los que esos ambientes suceden sean representados correctamente.
Las metodologías y herramientas mencionadas previamente, nos permiten su estudio en detalle, arribando escenarios fácticos o situaciones hipotéticas para la intervención de objetos arquitectónicos, como por ejemplo el del patrimonio cultural..

3 9
Gráfico nº 2.0.17 - Reconstrucción hipotética de tumba - Blender.
3.0
Métodos-Interpretación
La tumba 9890 de la Necrópolis de Pontecagnano se encuentra en proceso de estudio. Se solicitó material para estudiar y para ser utilizado en exposiciones y estudios académicos. Ante esta necesidad se consideró efectuar un procesamiento de los datos obtenidos con un Escaneo Laser y fotografias de la tumba, para poder ser expuestos en el museo. Solicitaron una exploración de un modelado texturalizado in situ, fotogrametrías de las caras de la tumba para hacer una base de datos.
En una etapa explorativa de la metodología, se comenzó a evaluar el material preexistente (Relevamiento del escaneo Laser y fotografías del sitio) para determinar el alcance del mismo en función de los objetivos buscados. Llegamos a la conclusión que las fotos relevadas previamente no eran suficientes para efectuar una fotogrametría, por lo tanto se decidió hacer un foto alineamiento a escala de las fachada.
En base a estos datos preliminares, se consideró realizar el estudio metodológico en 3 Niveles:
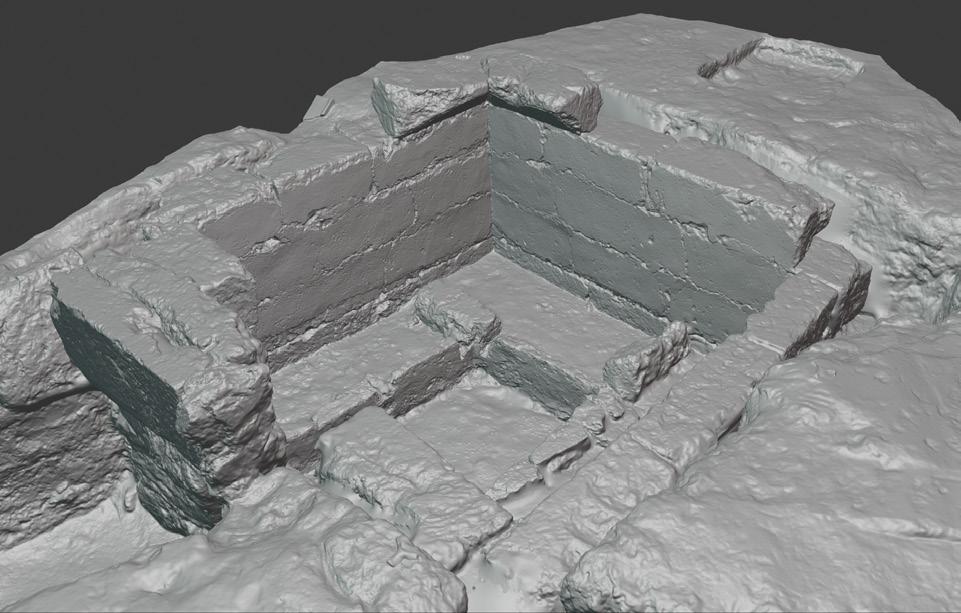
El Nivel I, se desarrolló entorno a la problemática de la cantidad de caras excesivas que posee el modelo, que además de dificultar el procesamiento, garantiza un modelo de alta calidad y precisión para entender geométricamente el objeto de estudio y su emplazamiento (Gráfico 3.0.1).
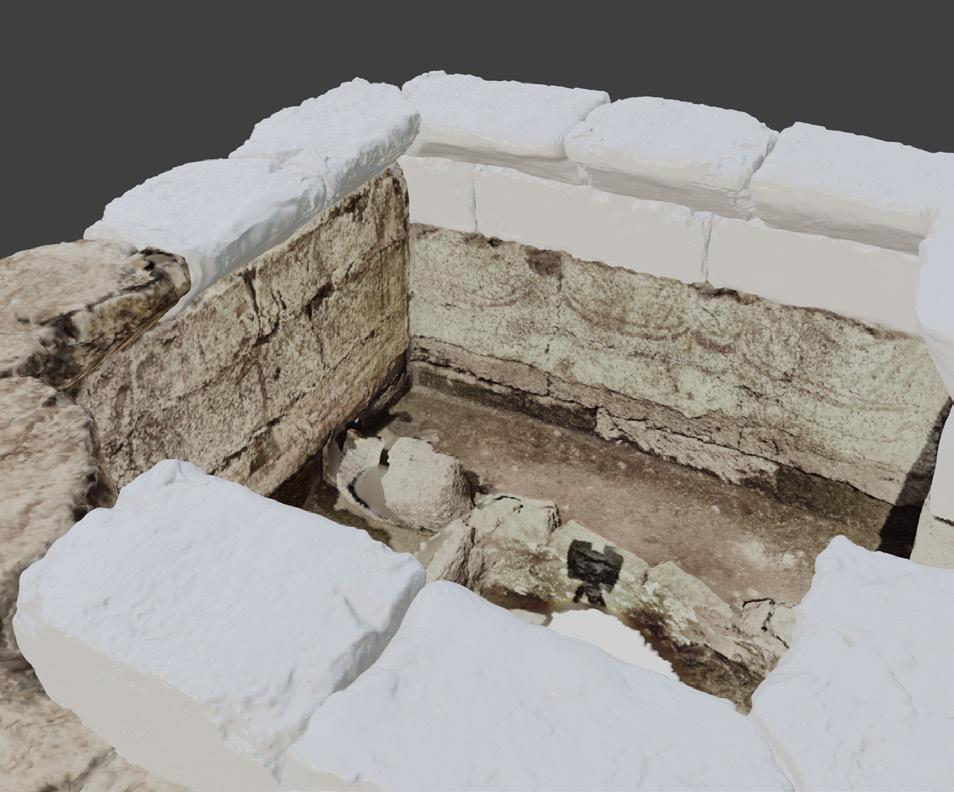
En el Nivel II se decidió hacer una nueva sesión de fotos para generar un material de alta calidad y número suficiente. Estas nuevas capturas fueron hechas en el museo porque la tumba fue trasladada al museo. Esto garantizó una luz homogénea de la escena, por lo tanto con resultados precisos en la texturas. En sintesis, el segundo nivel es un modelado enfocado en la textura (Gráfico 3.0.2).
En el Nivel III, se desarrolló un proceso de reconstrucción de la tumba con un objetivo didáctico totalmente gráfico, de como se piensa que fue históricamente. La reconstrucción de la tumba 9890 está enfocada en el objeto y su geometría, y otra parte en la reconstrucción de las pinturas (Gráfico 3.0.3).
4 2
obtenido
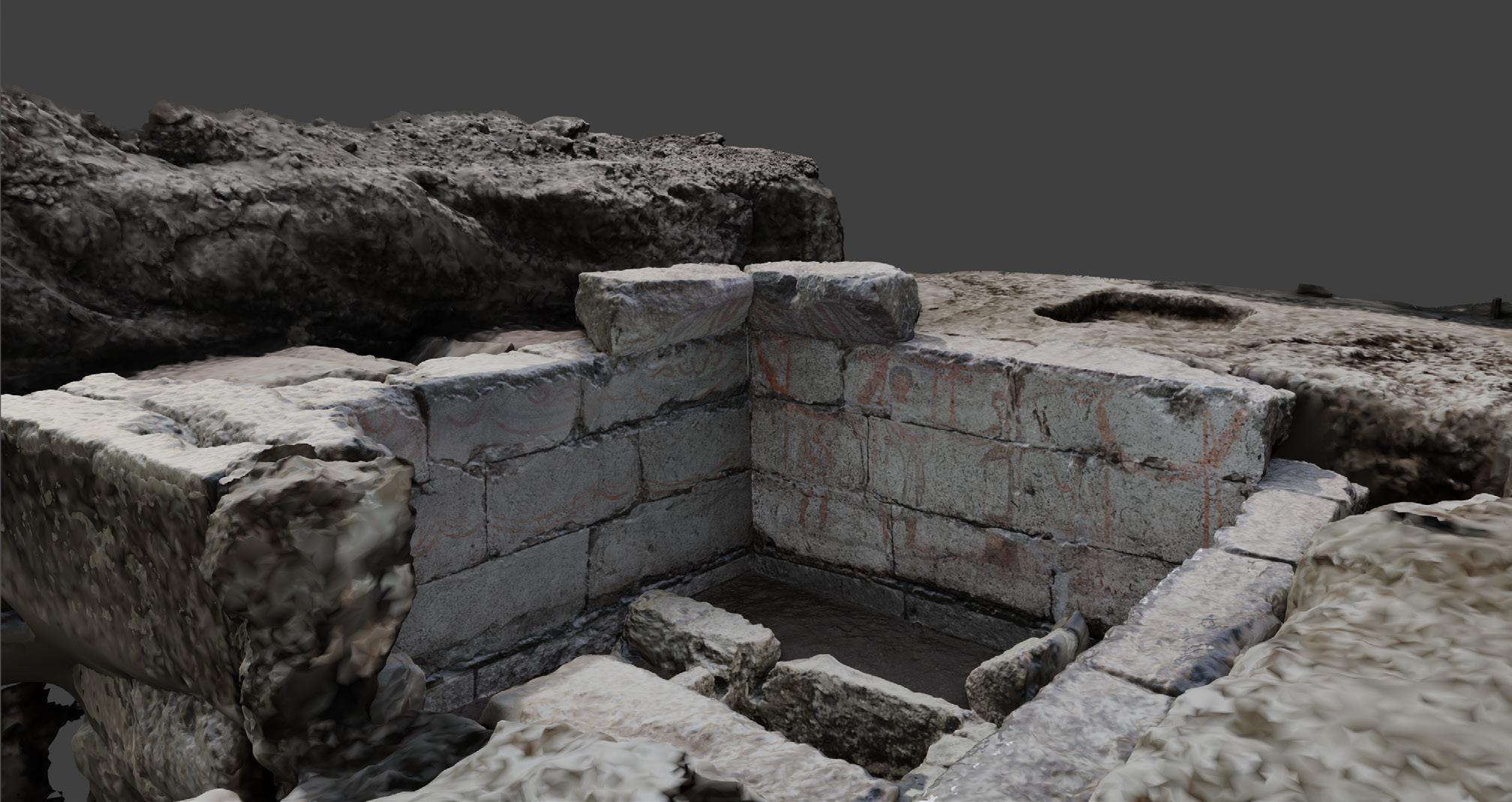
Gráfico nº3.0.3 - Modelo 3D texturalizado producto de la fusión, entre los modelos del escaneo laser y fotogrametria, en el estado como fue hallada la tumba 9890. Producto del Nivel III, software utilizado: Blender.

4 3
Gráfico nº3.0.1 - Modelo 3D geométrico
del relevamiento a partir de escaneo laser.
Gráfico nº3.0.2 - Modelo 3D texturalizado obtenido del relevamiento a partir de fotogrametría.
3.1 Nivel I
scaneo laser: adquisición y procesamiento de datos
Como ya he nombrado en la introducción de este capítulo, el relevamiento de Escaneo Laser y las fotos, que fueron hecho in situ, habían sido elaboradas para no perder la información de la tumba en el lugar a causa del traslado que se iba a efectuar. Por lo tanto no había sido hecho con el objetivo de hacer un modelo de calidad enfocado en las texturas (sobre todo en las pinturas), y por estas razones careció de una calidad adecuada para este trabajo.
Por estas causas, se abordo el trabajo de diferentes maneras, para evaluar los resultados y su posible utilización. Para esto se utilizaron diversos tipos de softwares.
Luego de trabajar y producir la primera mesh texturalizada, inmediatamente en el laboratorio nos dimos cuenta que el problema del relevamiento había sido tomado un día soleado por lo cual existía una distorsión de color con la realidad y entre cada una de las fachadas por la diferencia de iluminación, como se ve en el Gráfico nº3.1.1 a pie de página.
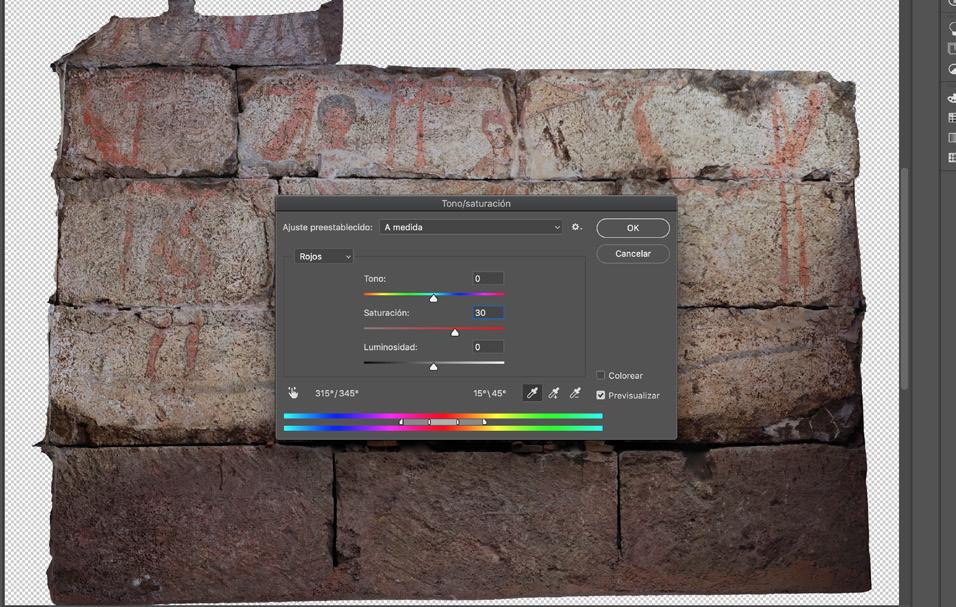
A partir de la edición de fotografía en Photoshop y editando los valores de brillo/contraste, balances de blancos, saturación de colores específicamente (Rojos, Amarillos y Magentas), todo esto en busca de una homogenización de todos los materiales que, en la realidad es un único material.

E
4 5
Gráfico nº3.1.1 - Panorámicas escaneo laser para texturalizar, previa a la corrección de colores.
Este proceso se hizo en las 5 panorámicas que dan la textura a los Modelos de Scene1, sin embargo persistió el perjuicio respecto de la manera en que se ven las pinturas dentro de la tumba.
Una vez re calculada la textura con las nuevas panorámicas, se comprobó lo que ya se suponía de las pinturas, su coloración se había perdido. Porque cuando se acomodó la saturación de los colores rojo y amarillo en Photoshop se perdió toda la información de saturación de la fachada de la tumba. Pero se logró el objetivo de mantener la textura similar a la realidad y homogénea en coloración.
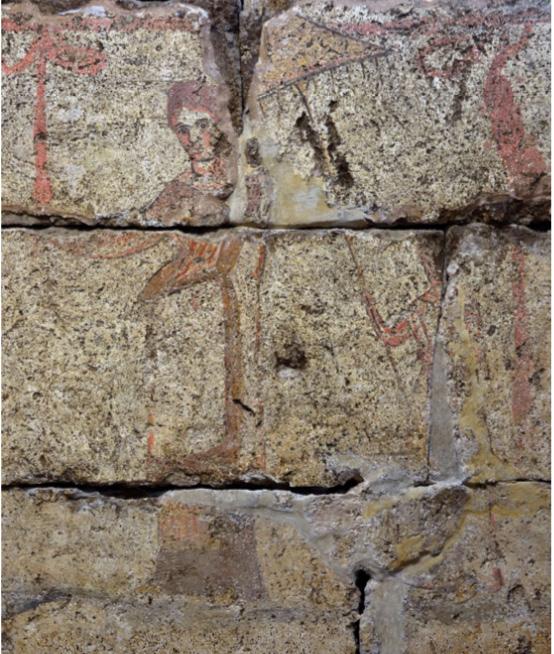
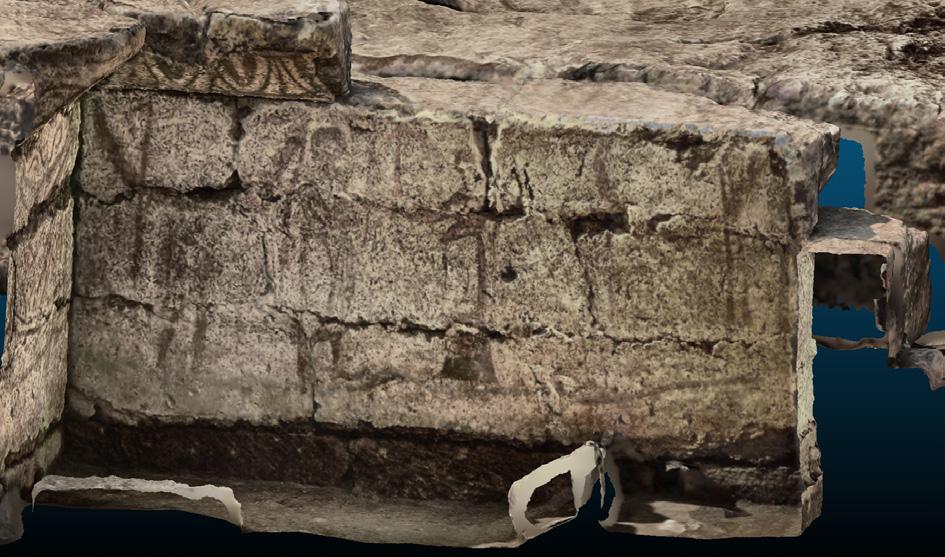
Las diferencias de la coloración entre las fotos tomadas en la tumba y la mesh texturalizada con Escaneo Laser se pueden observar en los gráficos anexos 3.1.2 y 3.1.3.
1 Scene: “El software Scene ha sido especialmente diseñado para todos los escáneres láser Focus y de otros fabricantes. Procesa y administra datos de escaneado de forma sencilla y eficiente, empleando el registro in situ en tiempo real, el reconocimiento automático de objetos, el registro de escaneos y el sistema de posicionamiento.” Descripción por los creadores en http//www.faro.com/.
4 6
Gráfico nº3.1.2 - Mesh Texturalizada.
Gráfico nº3.1.3 - Foto de mujer y hombre con sombrilla.










4 7
Gráfico nº3.1.4 - Comparación de panorámicas del escaneo laser antes y después de edición de color.
C ompletamiento de la mesh
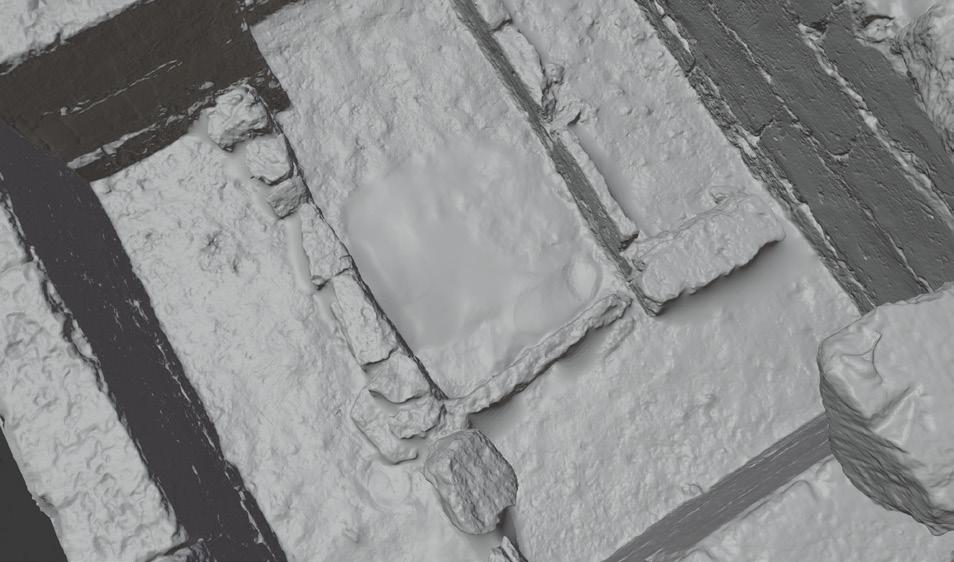
Una vez acomodada la textura de la mesh se completaron los agujeros de la misma. Para esto se aplicaron, o se probaron, diferentes softwares open source en busca de un resultado que se asemeje más la realidad.
Las problemáticas de este nivel fue trabajar la extrema cantidad de caras que poseía esta malla, alrededor de 10 millones, que perjudicaba o hacían imposible un trabajo fluido en casi cualquier programa. Es importante remarcar que se decidió mantener este modelo con esta cantidad de caras dado que la calidad y detalle de toda la excavación y su importancia arqueológica.
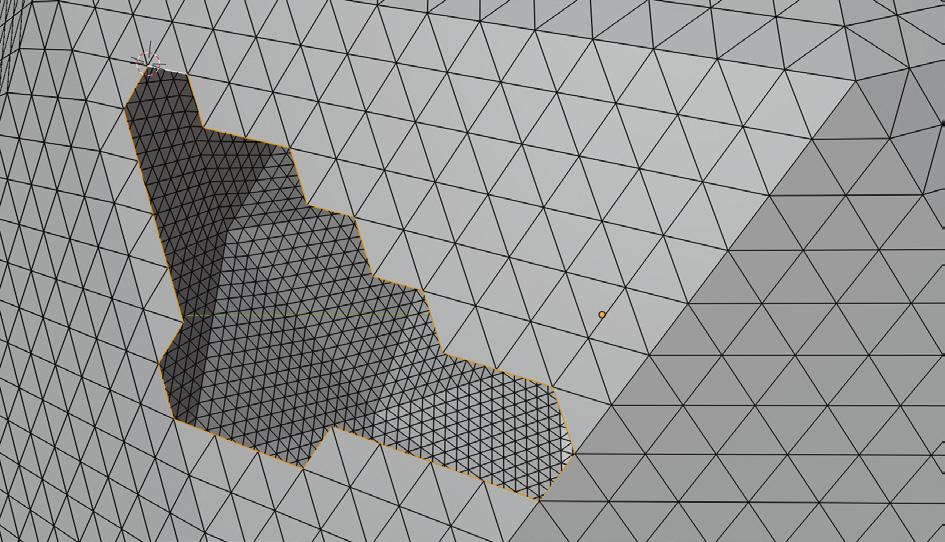
Primero se probó con Blender, que con una interface muy sencilla da dos posibilidades: un Fill automático como se ve en la imagen o simplemente presionando el shortcut1 “F” de Face que crea una cara a partir de 3 puntos. El problema de este metodo es que hay que seleccionar 1 a uno los ejes o puntos para poder hacerlo, así que insumiría mucho tiempo efectuarlo.
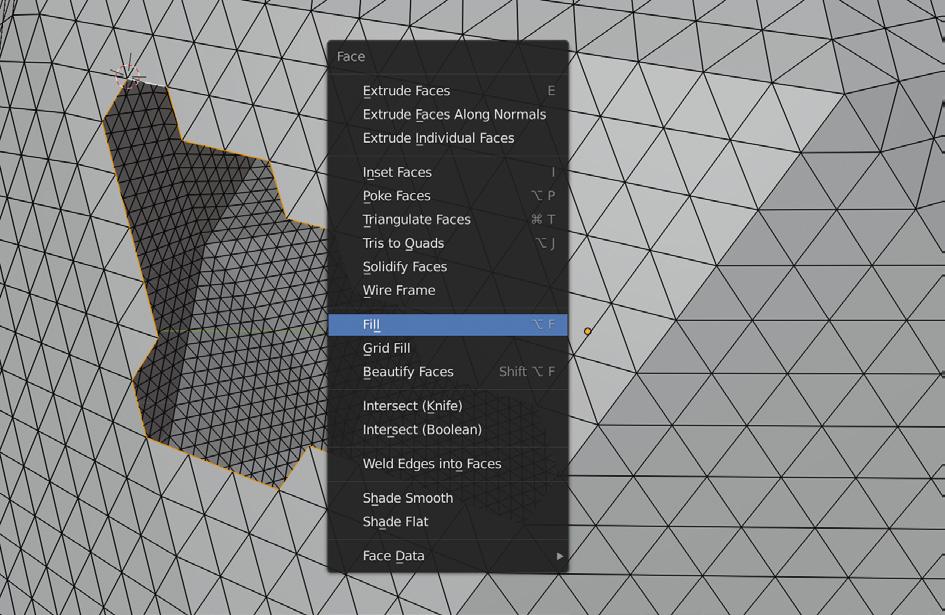
1 Atajo de teclado en softwares.
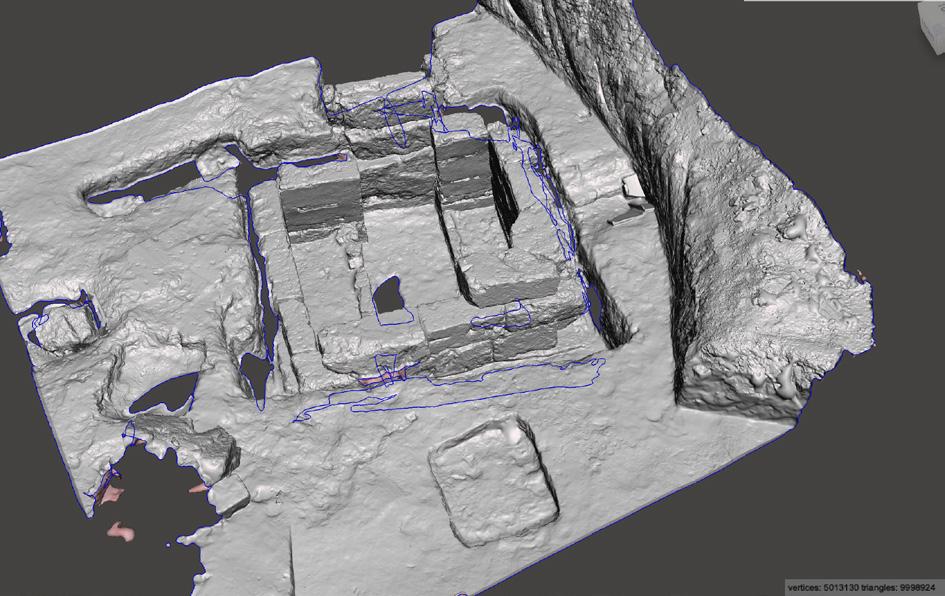 Gráfico nº3.1.5 - Mesh 10M with holes.
Gráfico nº3.1.6a- Filling holes with Blender.
Gráfico nº3.1.5 - Mesh 10M with holes.
Gráfico nº3.1.6a- Filling holes with Blender.
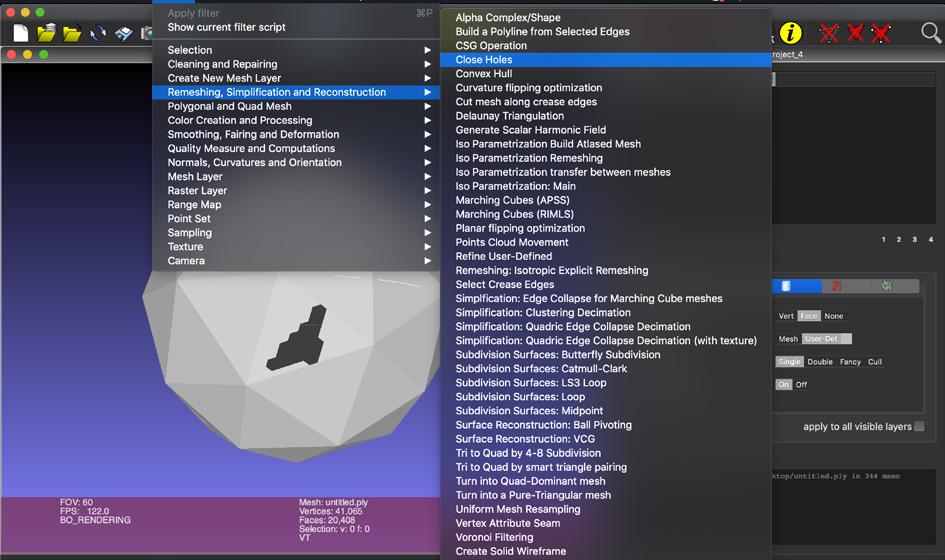
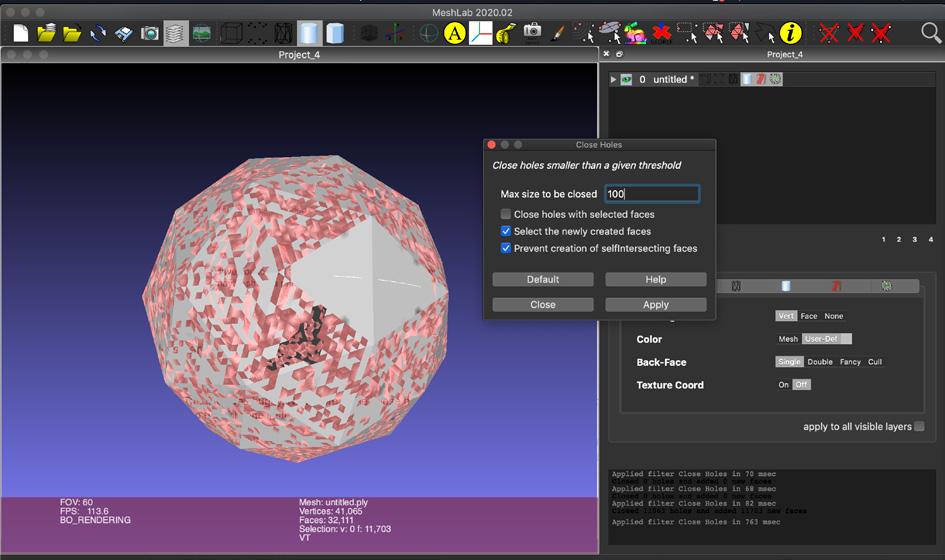
Luego se probó con MeshLab, donde se hace a partir de un algoritmo matemático, el proceso no es intuitivo depende de ejecutar el comando y no se logró un resultado rápido y efectivo. Por lo tanto hubiese sido un trabajo tedioso de prueba y error cambiando la opción Max size to be Closed hasta que funcione. En una mesh sencilla no hubiese, como la de los gráficos 3.16b, no hubiese sido un problema mayor, pero en una como la de la tumba si.
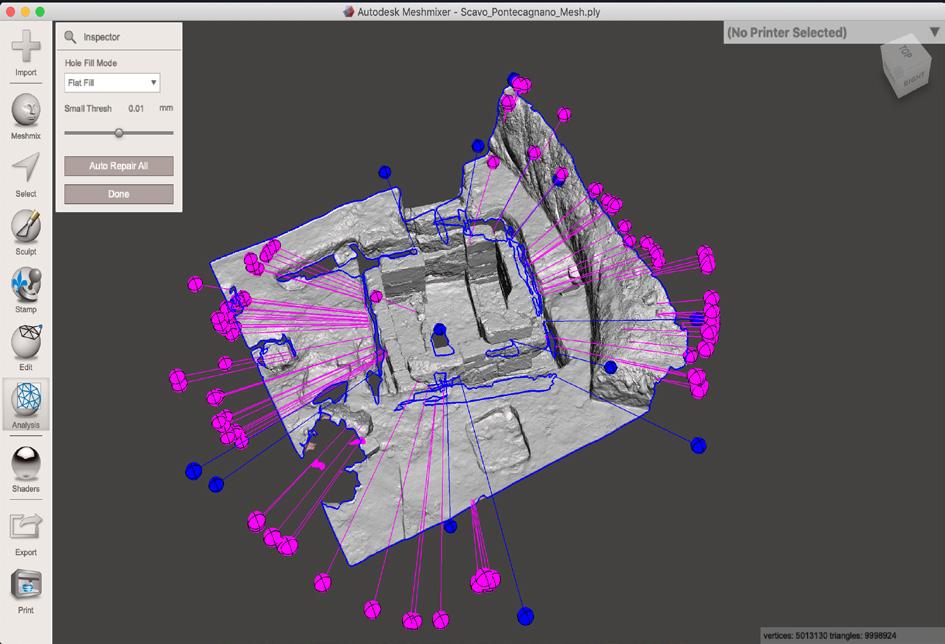
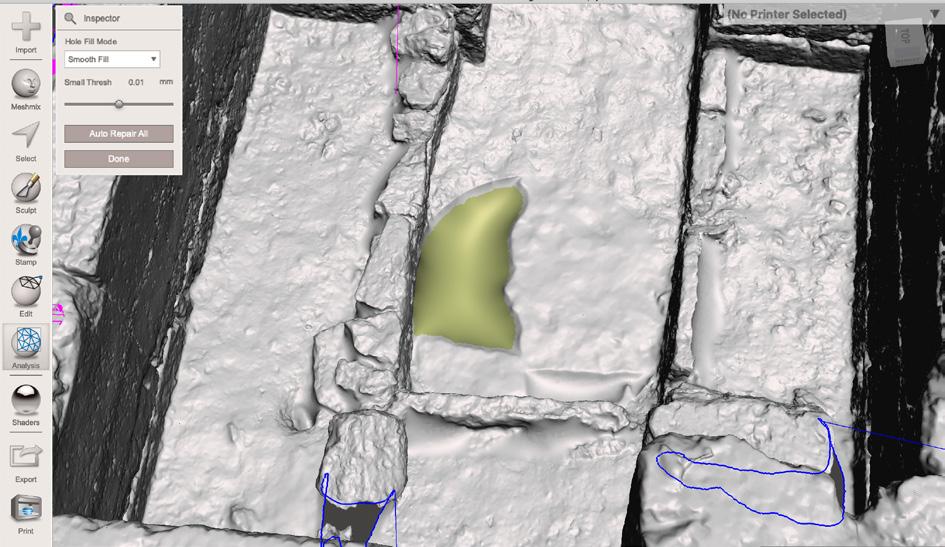
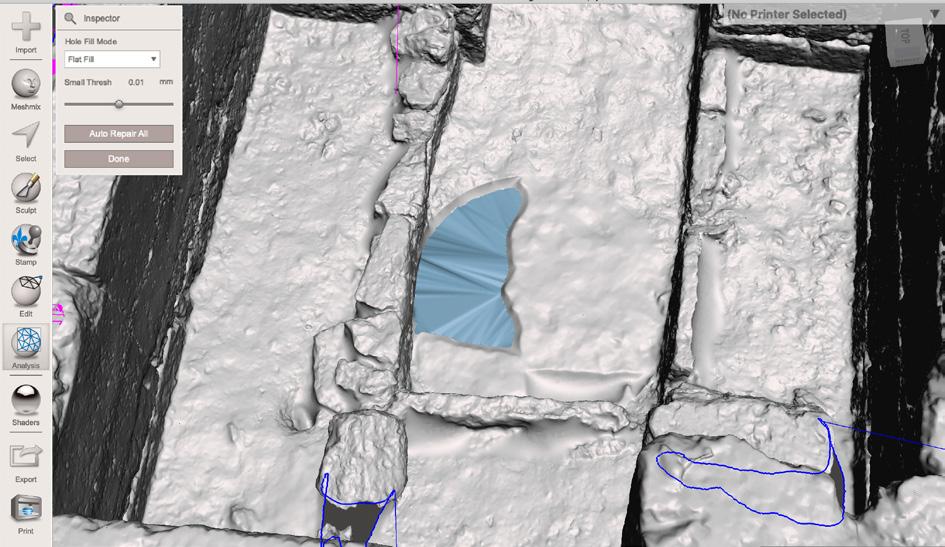
Por lo tanto se decidió utilizar Meshmixer de Autodesk, donde la interfaz hace muy sencillo ejecutar este procedimiento, además tiene opciones para elegir cuales agujeros ejecutar este proceso (en violetas los pequeños y en azul lo de mayor dimensión) y la manera que se desea completar el completamiento (Flat Fill, Minimal fill y Smooth Fill) todo esto se puede observar en el gráfico 3.1.16c.
Una vez rellenado todos los agujeros, de una manera procedural1 se pasa a hacer la edición de la mesh a partir de un metodo de esculpido o sculpting.
 1 En computación generación por procedimientos o procedimental es el método de creación de datos con algoritmos en lugar de forma manual.
Gráfico nº3.1.6b - Filling holes with MeshLab.
1 En computación generación por procedimientos o procedimental es el método de creación de datos con algoritmos en lugar de forma manual.
Gráfico nº3.1.6b - Filling holes with MeshLab.
4 9
Gráfico nº3.1.6c - Filling holes with Meshmixer.
El sculpting1 se ejecutó en los agujeros más pertinentesde la malla para asemejarlo al entorno inmediato desde donde fue rellenado. Este proceso se hizo en Meshmixer por la facilidad de rellenar los agujeros y editarlo en contemporáneo. Como se pueden observar en las imágenes 3.1.7a/b.
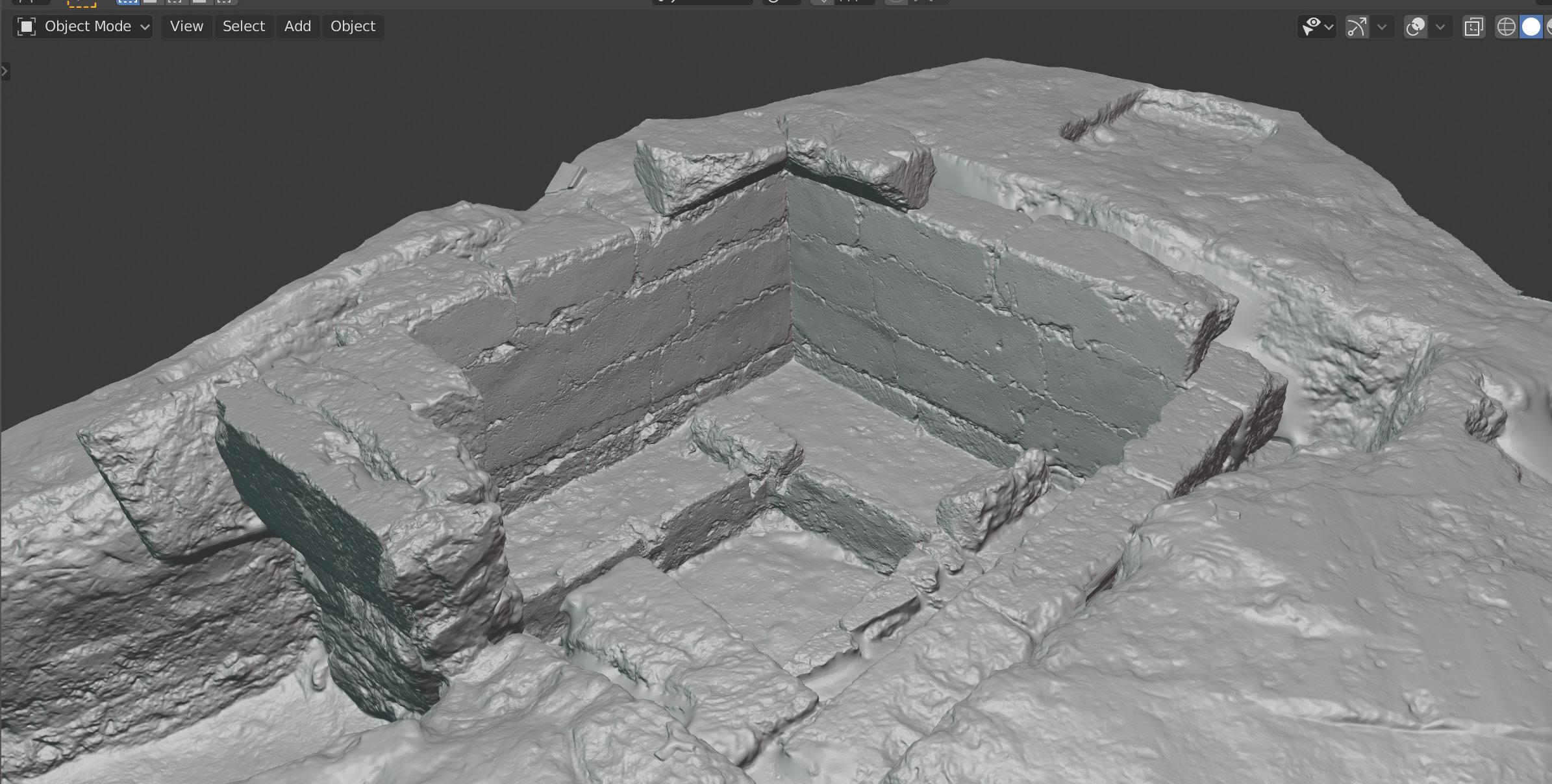
Luego de completar estos pasos, se obtuvo el modelo geométrico final (Gráfico 3.1.8), pero en el completamiento con un procedural Fill Holes, generó errores en la textura porque estos nuevas caras generadas y luego esculpidas no poseían información de color. Este aspecto se puede ver la comparación del Modelo Geométrico Final de la excavación y el modelo con color2 Gráfico 3.1.10.
La edición de la textura para corregir estos errores, previamente nombrados, se explica en el Nivel III, nivel de la reconstrucción.
1 El sculpting en el ambiente de los software de modelación 3D viene de hacer una analogía de escultura, y significa esculpir literalmente. Pero en los softwares es un procedimiento a mano con diferentes pinceles para intervenir una malla con diversos procedimientos. Por ejemplo, inflar, dibujar, deformacion elastica, etc.
2 Digo color y no textura por un concepto que explicare en el próximo apartado.
5 0
Gráfico nº3.1.7 - Agujero rellenado con Flat FillMeshmixer.a
Gráfico nº3.1.7b - Agujero rellenado con Smooth Fill - Meshmixer.
Gráfico nº3.1.8 - Superficie luego del sculpting,
T exturización y vertex color
En esta sección se explicará las problemáticas en la corrección de la “textura” en este relevamiento tomado con Escaneo Laser luego del completamiento de la mesh. Primero hay que retomar el concepto de qué es una textura, qué es lo que la define como textura e introducir qué son los vertex colors.
El foco de atención se tiene que poner en qué es lo que define una textura, porque a simple vista son lo mismo y
pueden llegar a tener resultados, sino iguales, casi idénticos.
Una textura la define una imagen en formatos típicos de esta (JPG, TIFF, PNG) con un mapeo en coordenadas UV sobre una mesh. A diferencia de esto un vertex Color no posee una imagen mapeada en UV, sino que cada vértice posee un color, esto hace engorrosa la edición, sobretodo en modelos con esta cantidad de caras.
5 1
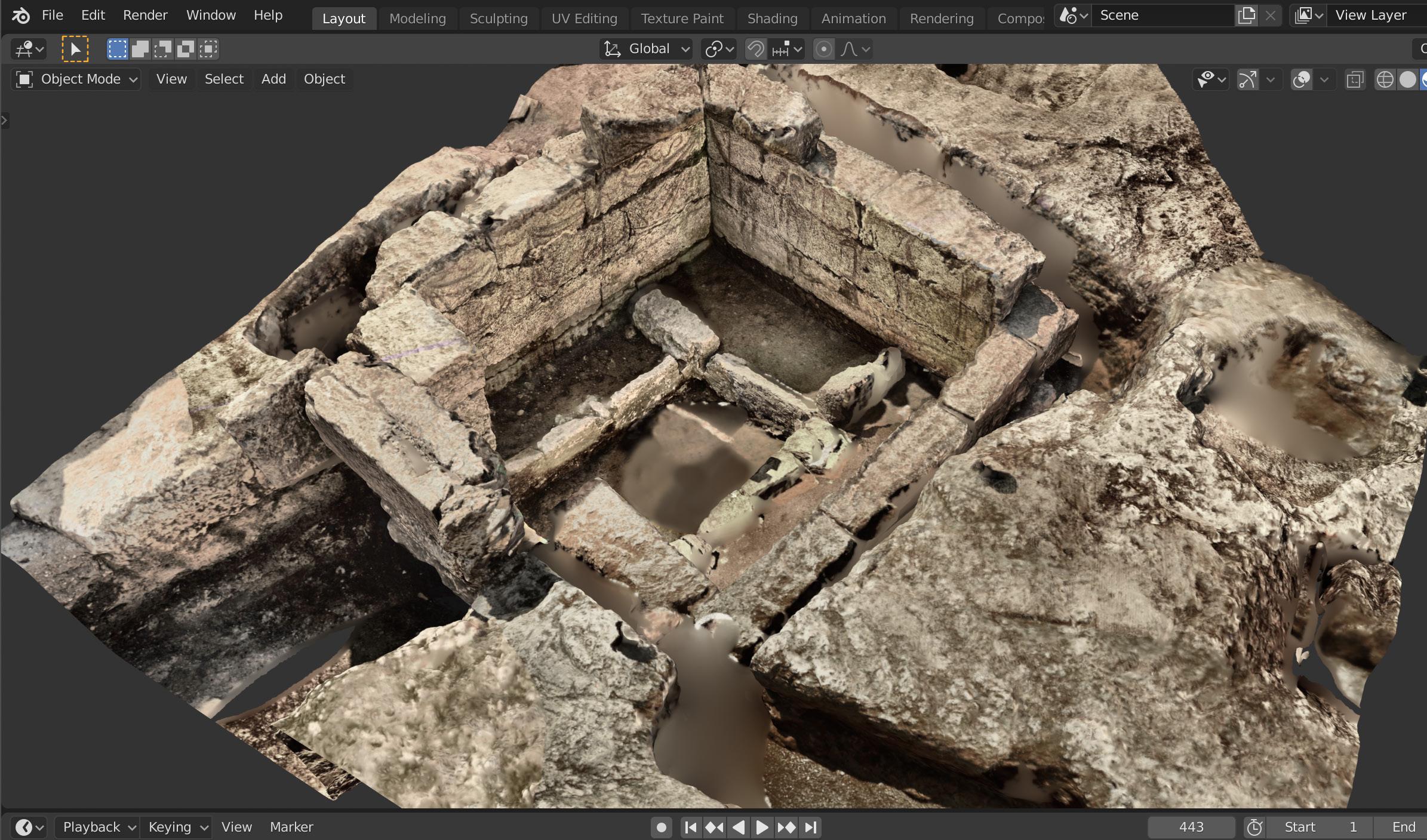
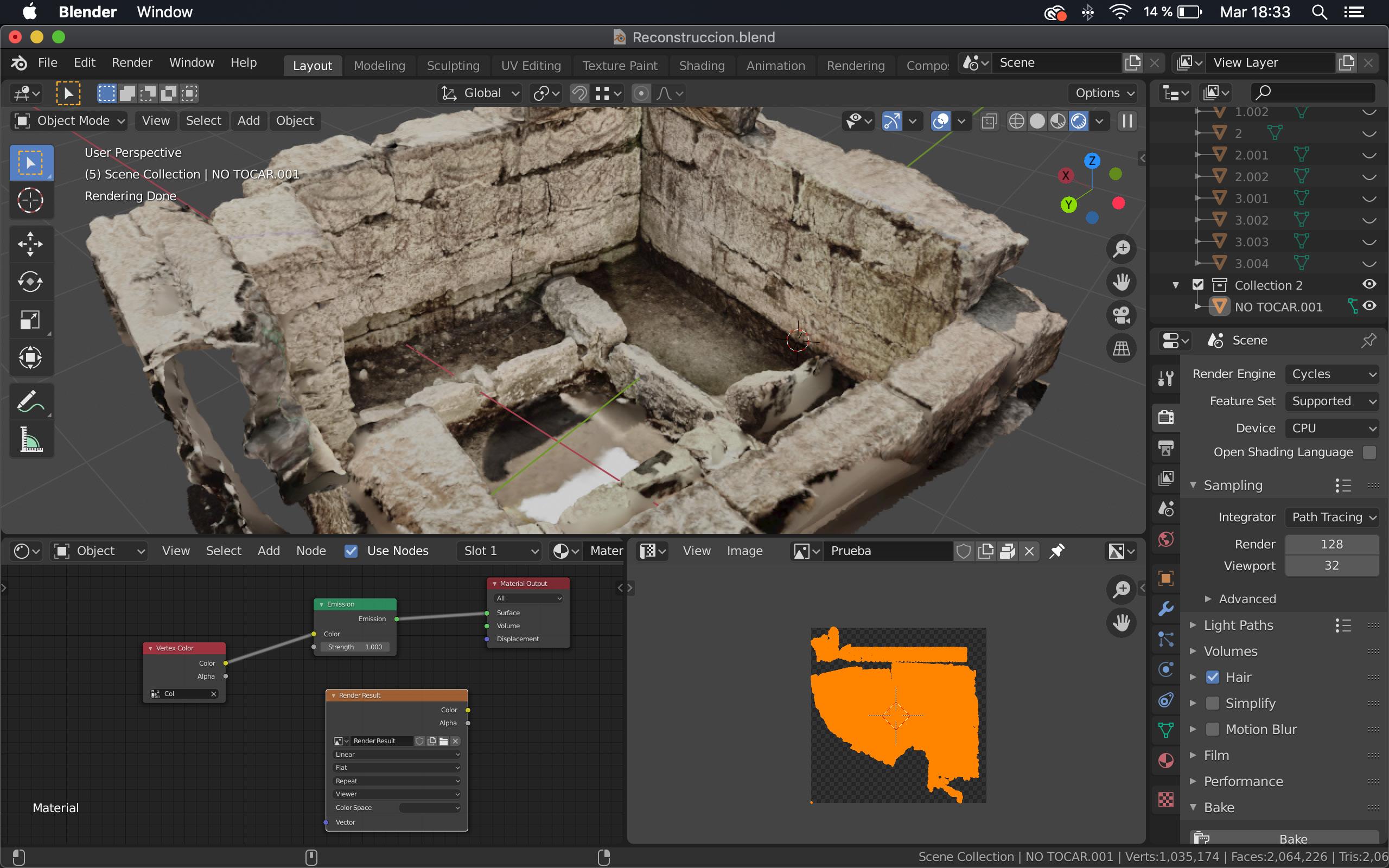
Gráfico nº3.1.9 - Modelo Geometríco de la tumba en sitio de excavación, interface de Blender 2.82a.
Se abordó esta situación primero intentando convertir los vertex colors en textura, o sea generar un Mapping de la mesh y exportar la imagen en JPG de estos Vertex Colors.
Para esto se probaron diferentes resoluciones. Los software utilizados son Blender, Cloud Compare y MeshLab para
generar la división de los Vertices y el color en objeto con una mesh por un lado y una textura por otro. Esto se busca para poder hacer una edición de la textura como imagen en softwares pertinentes, para poder fusionar la textura obtenida corregirla a partir de collage u otras técnicas y reimportarla al modelo.
5 2
Gráfico nº3.1.10 - Modelo geometríco con vertex colors - Zonas borrosas fueron las completadas por Fill Holes en Meshmixer.
La primera prueba se hizo a partir de Cloud Compare y no se logró, dado que no tiene las opciones para hacer mapping de texturas y poder separarlas. Pero si se logró hacer una reducción de la Mesh a partir de recortes de la misma a 7 millones de faces o caras, sacando partes irrelevantes para el caso de estudio.
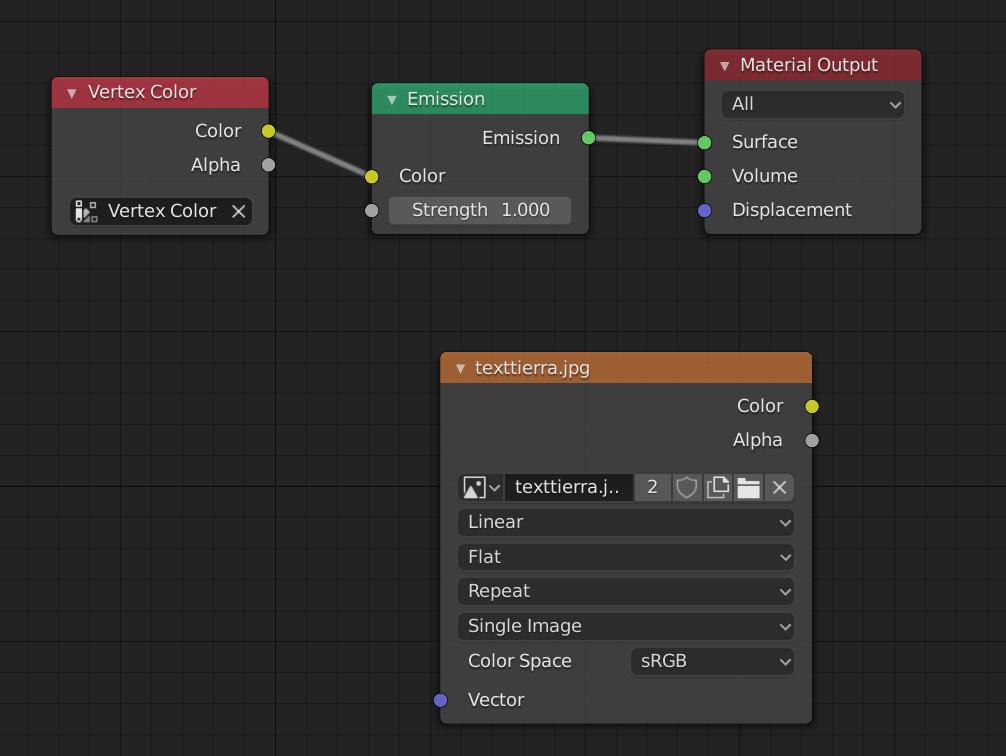
La segunda prueba, ya con la mesh reducida a 7 millones, se la importó a Blender y se probó hacer un mapping de UV, a partir de un cocinado o Baking1 de texturas. Para esto se configuró la textura a partir de Shaders con un emission, un input de Vertex color y el Material Output Gráfico
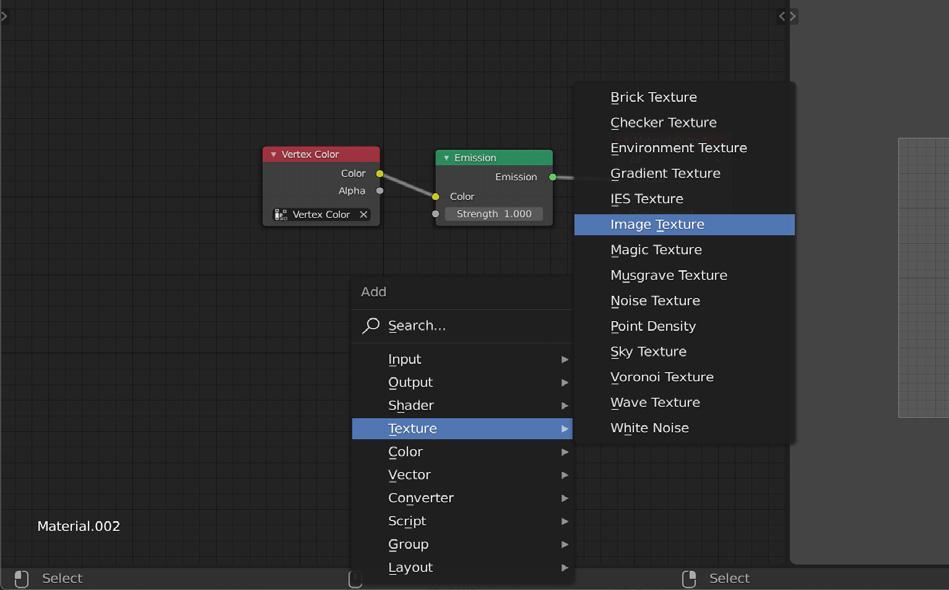

3.1.11. Se podría haber utilizado un diffuse, pero habría que haber iluminado la escena como en la realidad para que quede igual, en cambio el emission ilumina el objeto exactamente con los colores del Vertex Color, por lo tanto no es necesario una iluminación de escena y se visualiza como en el gráfico 3.1.10. (Para esto se debe estar en el Viewport Shading en Material Preview o Rendered).
1 Bake o cocinado, es una manera de fijar todos los parámetros de una textura, para aligerar el procesado de la misma en un sistema de Raytracing. Pero a su vez sirve para congelarla en un momento y poder editarla, con softwares externos.
Gráfico nº3.1.11 - Configuración vertex colors.
Gráfico nº3.1.12 - Blender 2.82 UV editor.
5 3
Gráfico nº3.1.13a - Blender 2.82 Shader Editor.
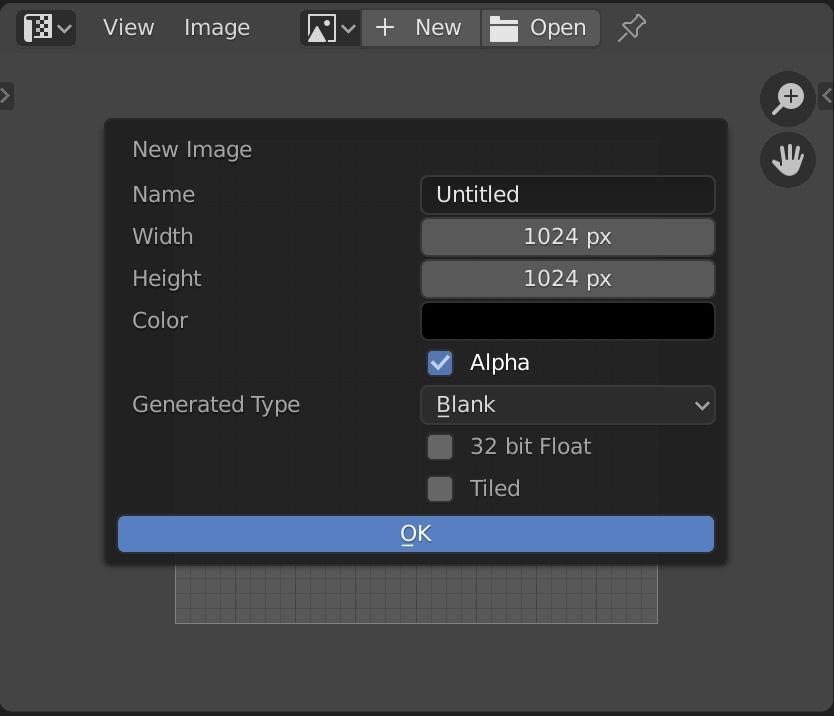
Una vez configurado, se necesita crear el contenedor de la imagen para el bake, para esto en la sección Uv Editor (Gráfico 3.1.12) se crea una imagen nueva y se selecciona la dimensión en Pixeles que se desea. Luego se pasa a agregar a nuestros shaders una Image texture (Gráfico 3.1.13a) y se selecciona la imagen nueva creada (Gráfico 3.1.13b). Este paso es uno de los dos esenciales para dividir el Vertex Color de la imagen.
Antes de proceeder al cocinado de la textura se debe hacer el segundo paso, que se le llama Unwrapping1, para esto hay que entrar al Edit Mode y seleccionar todas las caras, luego Presionar el shortcut Uy seleccionar Unwrap.
Posteriormente es necesario asegurar que se encuentre seleccionado el motor de RayTracing en Blender llamado Cycles. Configuramos la imagen como si fuese un render, Samples por pixel dimensiones, etc. Seleccionamos en nuestro Shader Editor la imagen donde decidimos el bake de nuestra textura la imagen previamente
1 Unwrapping es la de mapear una textura en 3D a un plano 2D (UV), por lo tanto seria desarmar la geometria eliminando la coordenada Z. Gráfico 3.1.14.
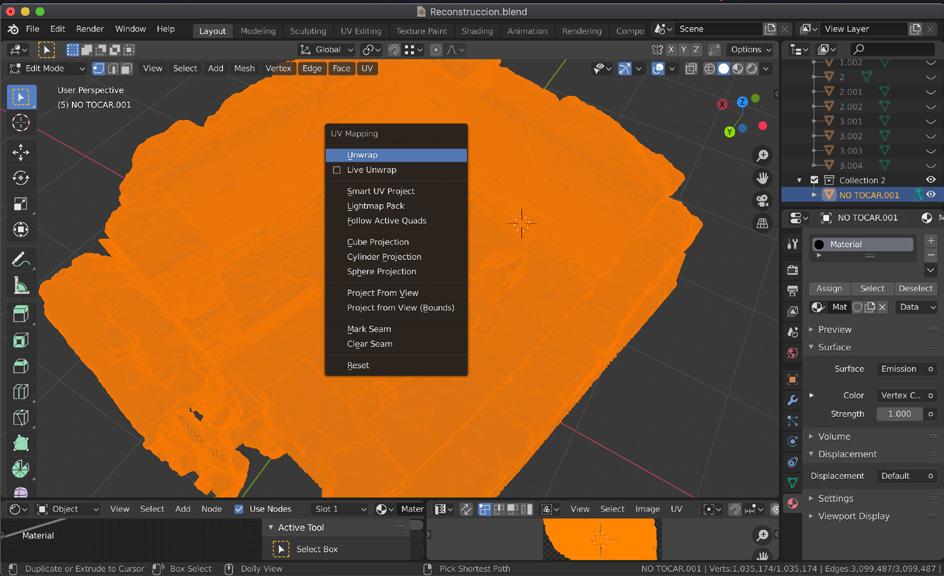 Gráfico nº3.1.13b - Blender 2.82 Shader Editor.
Gráfico nº3.1.13c - Blender 2.82 Unwrapping a UV maps en Edit Mode.
Gráfico nº3.1.13b - Blender 2.82 Shader Editor.
Gráfico nº3.1.13c - Blender 2.82 Unwrapping a UV maps en Edit Mode.
5 4
Gráfico nº3.1.14- Esquema de Unwrapping de un cubo en software 3D de texturalizado.
creada y las coordenadas UV generadas por el unwrapping.
Estos procesos, en especial el Unwraping y el Baking, para una geometría de 7 millones tardaría un tiempo excesivo y
no aseguraría la eficiencia de los procesos o una textura utilizable. Esta ineficiencia no permitió utilizar a estos dos procesos en la tumba. Sin embargo es posible utilizar estos procesos exitosamente.
Gráfico nº3.1.15 - Comprobación de pasos antes del baking Blender. En los recuadros abajo: a la izquierda la selección de la textura como recipiente de nueva imagen; a la derecha selección de las coordenadas UV En el recuadro de la esquina abajo a la derecha se encuentra el panel para la configuración del render, por lo tanto también del baking.
5 5
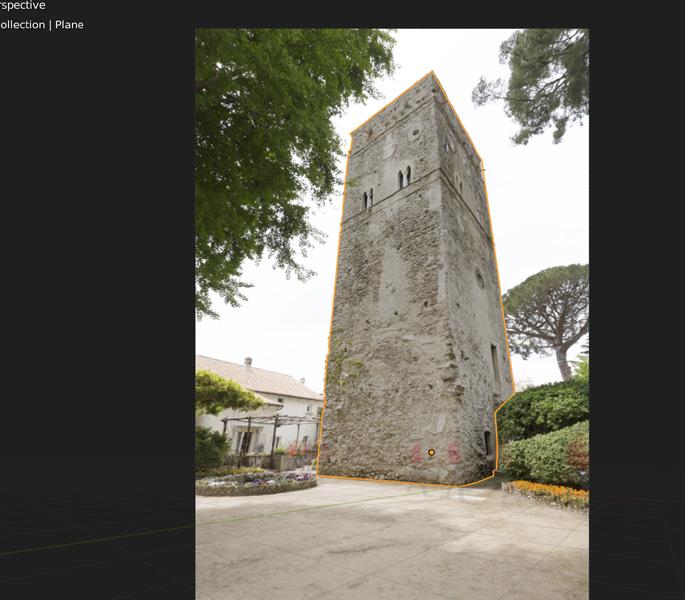
Para ejemplificar este hecho se trabajó con la Torre de Villa Rufolo para terminar esta sección. En el caso de la torre se hizo un Unwrapping de la textura desde una foto (Gráfico 3.1.16a) que es el mismo procedimiento explicado para hacerlo desde Vertex Colors.
Una vez hecho el cocinado para comprobar los resultamos podemos conectar la textura nueva cocinada al Material Output en el shader y comparar como se observa en los Gráficos 3.1.17a/b.
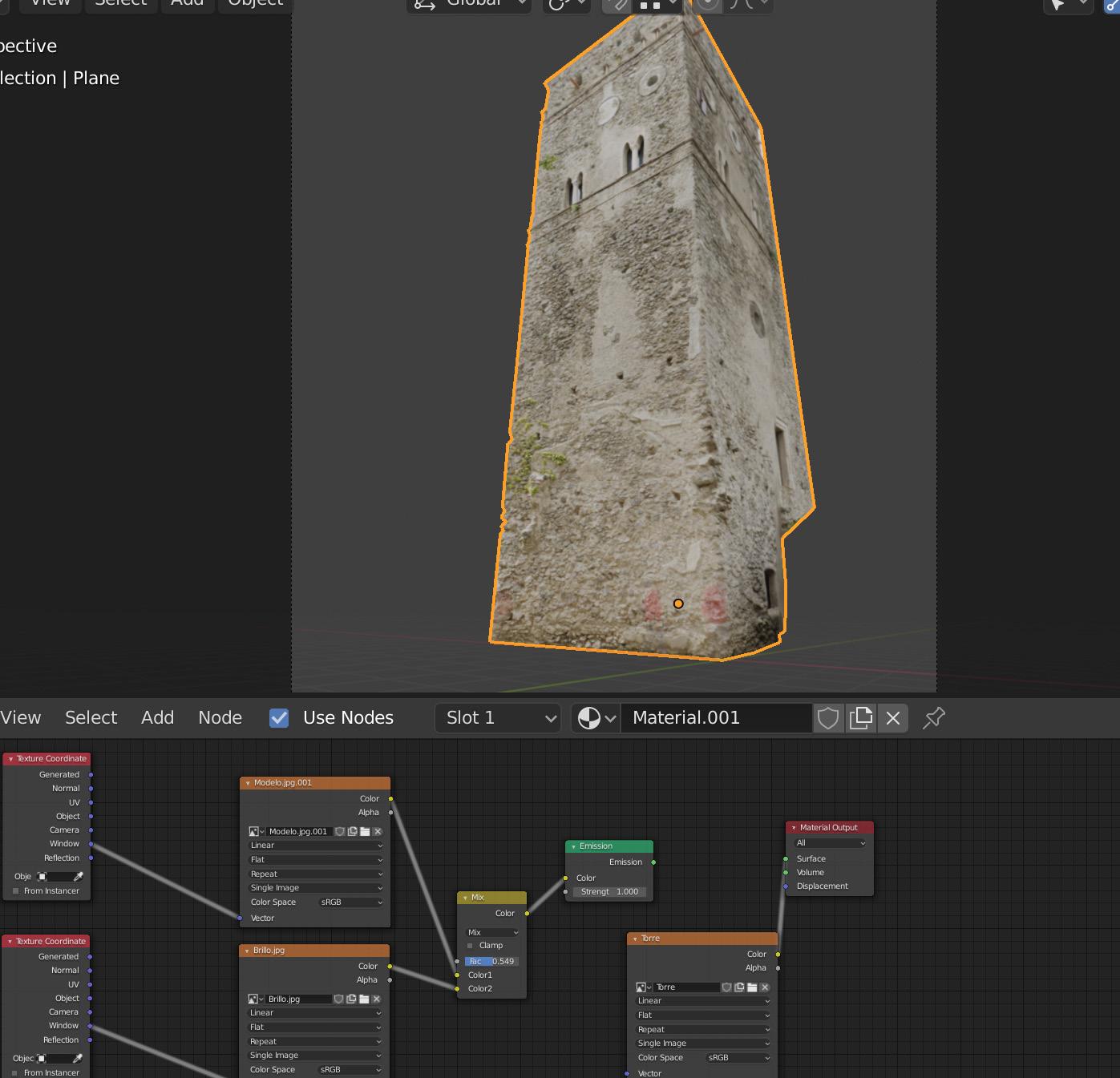
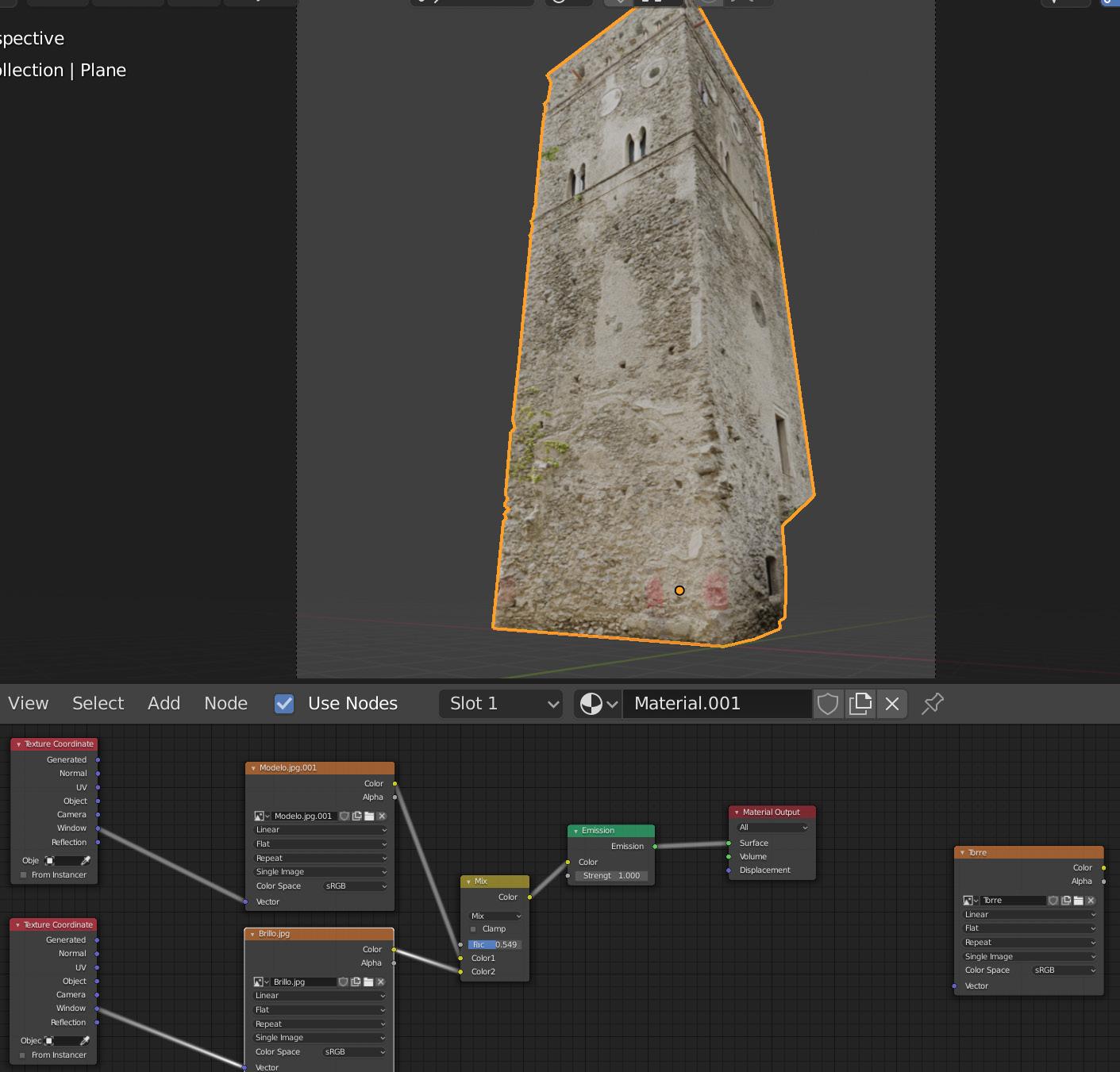
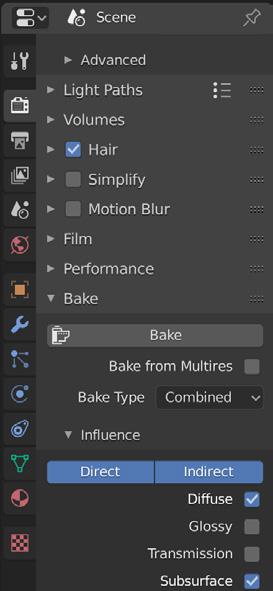
Gráfico nº3.1.16a
Gráfico nº3.1.16b - Baking de textura de Torre Villa Rufolo, se utilizo un tamaño de imagen de 4096 x 4096 pixeles con 160 Samples por Pixel.
- Foto Torre Villa Rufolo tomada de un relevamiento en foto 360º.
5 6
Gráfico nº3.1.17a/b - Comparación Imagen luego de un Bake y antes del bake desde una Foto.
Luego procedemos a guardar la imagen (gráfico 3.1.18) y se puede editar en cualquier software de edición de imágenes o texturas. Por ejemplo Photoshop o Substance Painter, como el gráfico 3.1.19. Una consideración para no perder las coordenadas Uv, es justamente no continuar a editar los mapas UV.
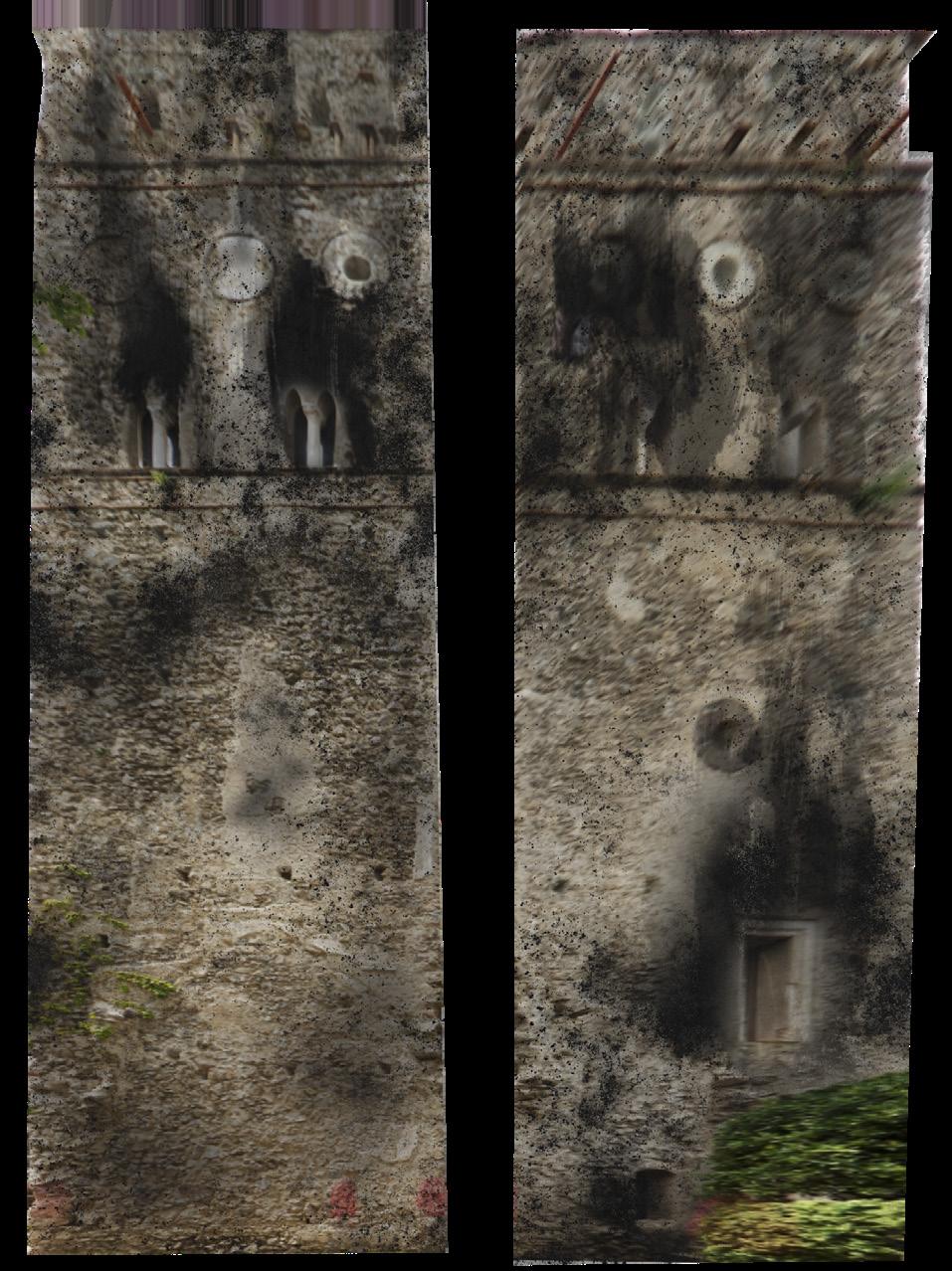
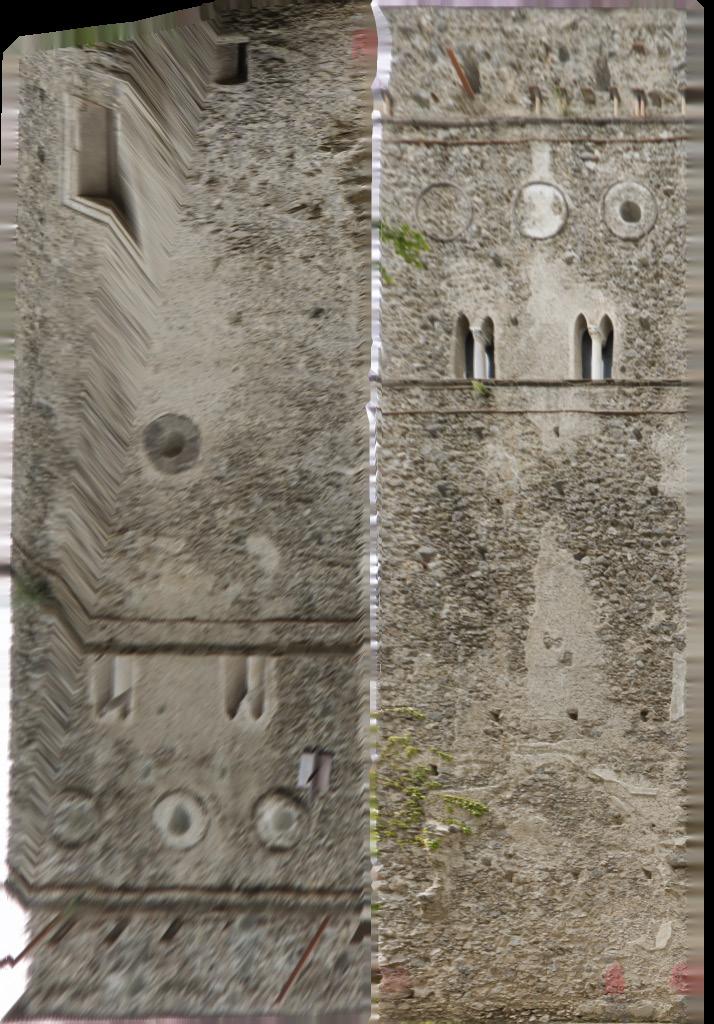
Gráfico nº3.1.18 - Arriba imagen en formato PNG de la Torre Villa Rufolo, exportada del baking de textura en Blender 2.82.
Gráfico nº3.1.19 - A la izquierda el imagen formato PNG exportada del software de edición de texturas 3D, Substance Painter. Cuando se exporta la textura de este software, vienen exportados diferentes archivos en formato de imagen para ser inseridos en Shaders para tener todos los valores de la textura generada.
5 7
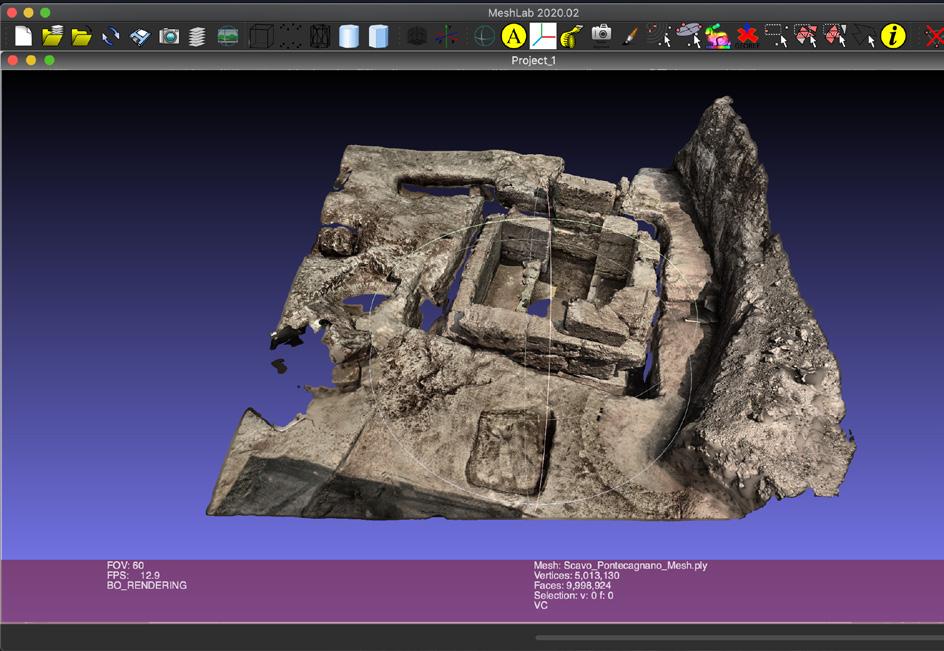
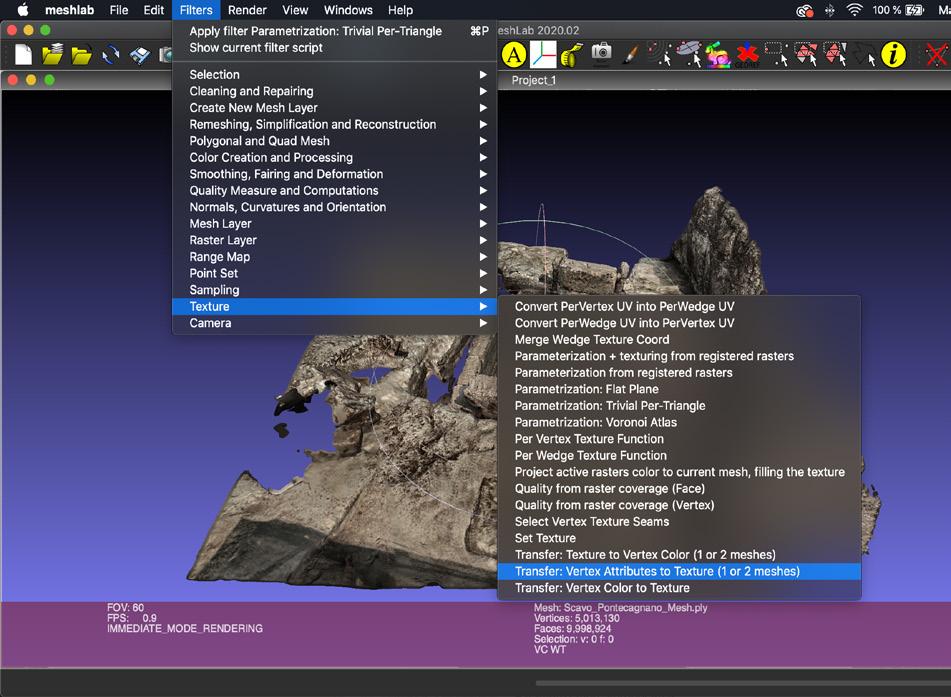
Como última aproximación se utilizo MeshLab, luego de importar la mesh de 10 millones en este caso, luego se pasa a hacer una Parametrización, que conceptual mismo es lo mismo que el Unwrap de Blender. En este punto debemos configurar la dimensión de la textura y el borde interno de los triángulos, es recomendable exagerar el tamaño de la Textura dado que si es pequeña siempre saldrá el error que el borde del triangulo es muy pequeño.

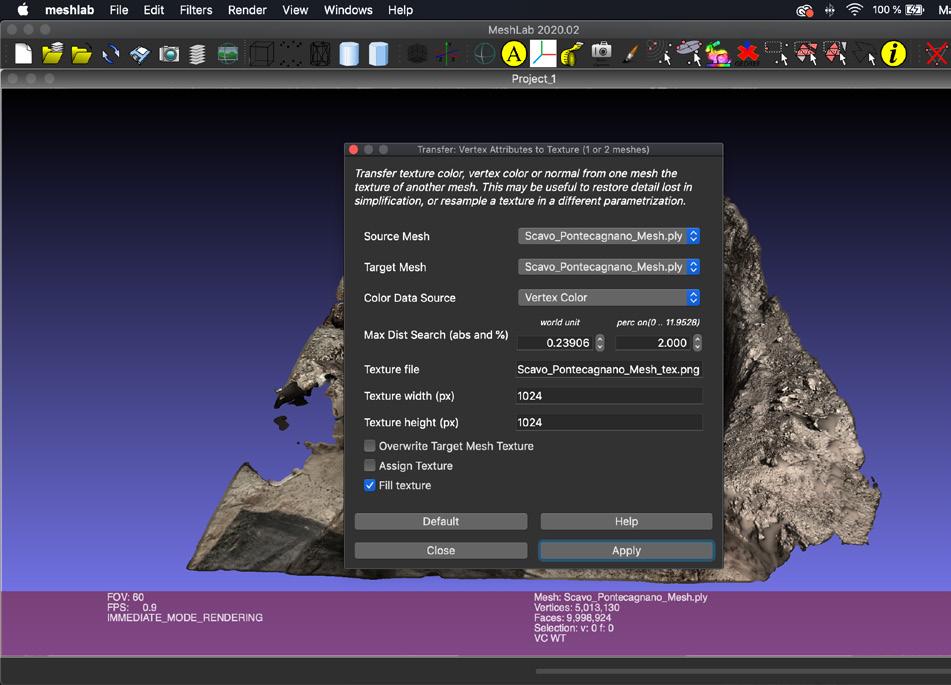
Luego de procesar esta imagen, en mi caso se hizo 6096 px y con un borde de 0.5 px, hay que pasar a hacer en Filters -> Textures -> Transfer: Vertex Attributes to texture, como se ve en el gráfico 3.1.22a. La configuración que hice de la textura es de 4096 x 4096, aseguramos que este el ítem de Color Data Source en la opción Vertex Color y luego Apply. Grafico 3.1.22b
Esto proceso tardará un tiempo considerable dado que debe rasterizar1 cada cara de la Mesh en un PNG nuevo y luego se exporta el modelo en OBJ y tendriamos
1 El formato raster es una matriz formada por información de color o también llamada Pixel.
Parametrization: Trivial Per-triangle Meshlab. Parametrization es un algoritmo de meshlab para hacer un mapeo de la textura en un sistema de coordenadas de dos dimensiones.

5 8
Gráfico nº3.1.20 - Interface MeshLab con la mesh de la excavación de la tumba nº 9890 generada con escaneo laser y procesada a travez de Software Scene.
Gráfico nº3.1.21b - Interface Meshlab -
nuestro OBJ con la textura aparte, con la información de coordenadas dentro del archivo .mtl, porque como se ve en archivo el PNG no queda así fácilmente entendible como la generada en la Torre de Villa Rufolo.
A pesar de lo enunciado en el párrafo anterior, el método III fue el que arrojó los mejores resultados pero son inconcistentes para la post-producción. En el caso del método con Blender no se justificó el trabajo debido a que insume un tiempo excesivo y los resultados son impredecibles. El método de Cloud Compare no se pudo utilizar porque el software carecía de
Gráfico nº3.1.23 - A la izquierda PNG de textura de la mesh de la tumba 9890 por MeshLab, relevamiento de escaneo laser.

5 9
Gráfico nº3.1.22a - Interface MeshLab Vertex attributes to Texture.
Gráfico nº3.1.22b - Arriba Interface MeshLab Vertex attributes to Texture.
3.2 Nivel II
F otogrametría: generación de datos
El material utilizado para la toma de fotos fue: Una camara Nikon D60 (explicada en detalle más adelante), un trípode fotográfico profesional para estabilizar la cámara y dos luces de fotografía, una con difusor de luz para no generar sombras en las caras y otra sin para generar iluminación de ambiente, dado que esta era escasa. El trípode permitía generar pequeñas correcciones al ángulo de la cámara y a su vez mantenerla estable, que en este caso sirvió porque la Velocidad de obturación que debía ser utilizada era mayor a un segundo (por la falta de luz).


La cámara Nikon D60 posee 10,2 megapíxeles en formato DX (frame de 23.7 x 15.5 mm) e incluye objetivo de estabilización de imágenes NIKKOR AF-S DX de 18 a 55 mm f/3.5-5.6 G VR (con reducción de la vibración): Los objetivos NIKKON poseen reconocida claridad y fidelidad de color1
La metodología de la toma de datos para asegurar resultados confiables debe ser precisa, por lo tanto se debe entender
1 Información tomada de la pagina oficial de Nikon. https:// www.nikon.com.mx/nikon-products/product-archive/dslr-cameras/d60.html
Gráfico nº3.2.1 - Foto de preparación de la escena en el sector dedicado a la tumba del Museo Pontecagnano.
6 1
Gráfico nº3.2.2 - Toma de datos por el autor.
y conocer previamente el funcionamiento del software, sobretodo que información requiere el mismo para el cálculo y armado de las piezas gráficas y evitar, así, posibles errores indeseados.
Las imágenes deben ser captadas con un plan claro y mantenerlo por todo el proceso de tomado de fotos; en el caso que se desee obtener un modelo texturizado es conveniente una iluminación uniforme en todas las caras.
Entre cada imagen sucesiva y posterior debe ser asegurado al menos un 60% de sobreposición, que el software lo utiliza para calcular los Tie points, explicados en el capítulo pertinente (Pag. 27).
La manera en que se abordó el escaneo de la Tumba 9890, fue a partir de dos sesiones sucesivas de fotos con diferentes técnicas, con iluminación profesional sobre las caras para homogeneizar el color de las fachadas.
La primera de ellas, las capturas se generaron paralelas a las caras de la tumba relevada, barriendo el objeto a partir
del desplazamiento de la cámara en función de la fachada. Con esta primera sesión se obtuvo la mayor cantidad de fotos y se hizo el mapeo general de la geometría.
Se empezó por la fachada izquierda desde abajo, con un recorrido de izquierda a derecha, asegurando la sobreposición, luego se repitió desde el inicio pero una fila superior, así se tomaron 4 filas por cara.
La segunda sesión se plantó la cámara en el centro geométrico de la planta y se hicieron diferentes capturas a 45º grados de la fachada en los ángulos y paralelas de las partes centrales de la fachada (solo para asegurar la sobreposición). Esta segunda sesión,tiene una mayor complejidad que la primera pero, por un lado, asegura relevar los datos con precisión de los ángulos para el modelado posterior. Y pootro lado incorpora información de profundidad que se podría perder por la toma de fotos paralela únicamente.
En el esquema adjunto se observa la metodología del tomado de fotos. Para el resultado expuesto se utilizaron 50 fotos.
6 2

6 3
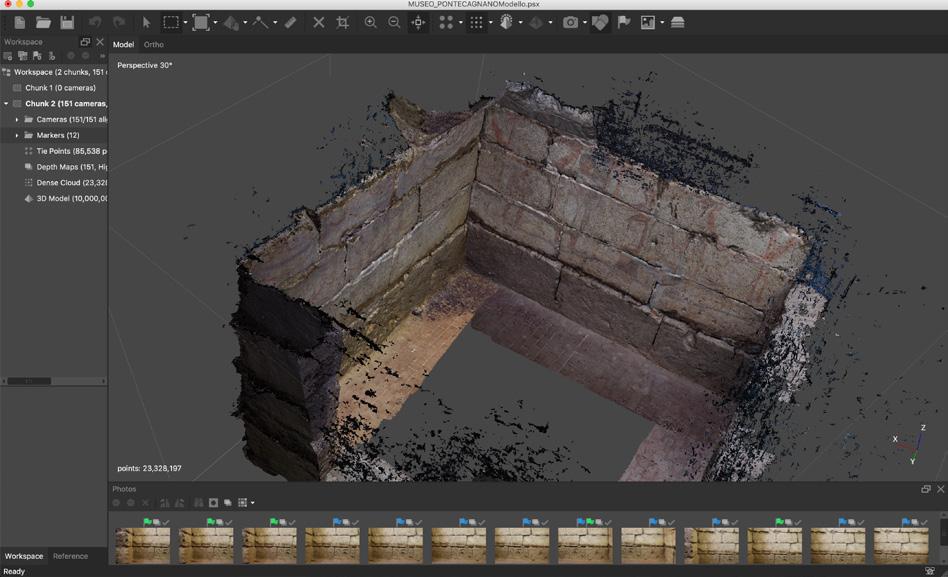
Gráfico nº3.2.3 - Esquema de captura de fotos para fotogrametría y resultado en Metashape.
P rocesamiento de datos
Antes de empezar el procesamiento hay que hacer una inspección de las fotos para ver si alguna de ellas tiene que ser editada o descartada, por encontrarse desenfocada o con errores de colores, dados a una iluminación diferente u otras razones. En el caso de la tumba no hubo errores de desenfoque pero se tuvieron que borrar 3 fotos de la misma toma dado que cambiaba significativamente la textura y podía generar diferencias en la textura general. Como habían sido tomadas diferentes fotos de ese punto. Por lo tanto no hubo se genero un agujero por falta de información en ese punto en el modelo final. Como ya he explicado en el capítulo 2 (Marco Teórico) el primer paso es hacer la Sparse Cloud Point y se hace a partir del Align Photos. Para esto, luego de seleccionar las fotos, se importan las fotos y en WorkFlow se selecciona la opción pertinente. La primera de prueba se dejó las opciones predeterminadas, y se logró un resultado óptimo. (Gráfico 3.2.4)
Como resultado se obtiene la Nube de puntos con los Tie Points, donde ya se puede observar a través del resultado obtenido si las superposiciones de las fotosfueron correctamente leídas por el software o si hubo errores en la toma.
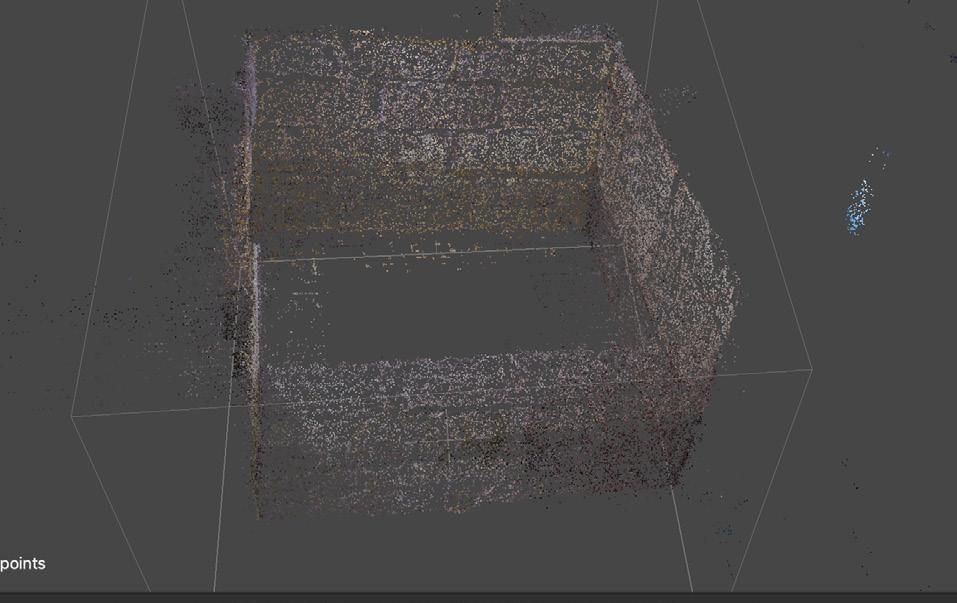
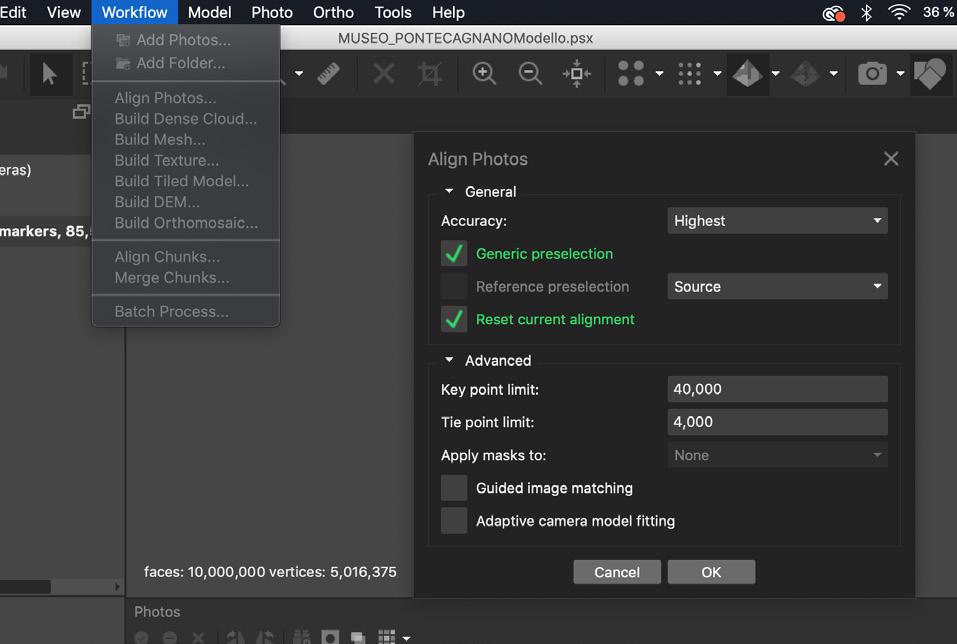 Gráfico nº3.2.4 - Align Photos - Agisoft MetashapePro.
Gráfico nº3.2.5 - Sparse Point Cloud.
Gráfico nº3.2.4 - Align Photos - Agisoft MetashapePro.
Gráfico nº3.2.5 - Sparse Point Cloud.
Con la Sparse Point Cloud luego se pasa a construir la Dense Cloud, estos procesos están separados porque el calculado de esta segunda Point Cloud es mayor la cantidad de información que se debe calcular. Para esto también se utilizó los defaults a excepción de Ultra High Quality (Gráfico 3.2.6) y se obtuvieron buenos resultados, como se ve en el Gráfico 3.2.7a/b.
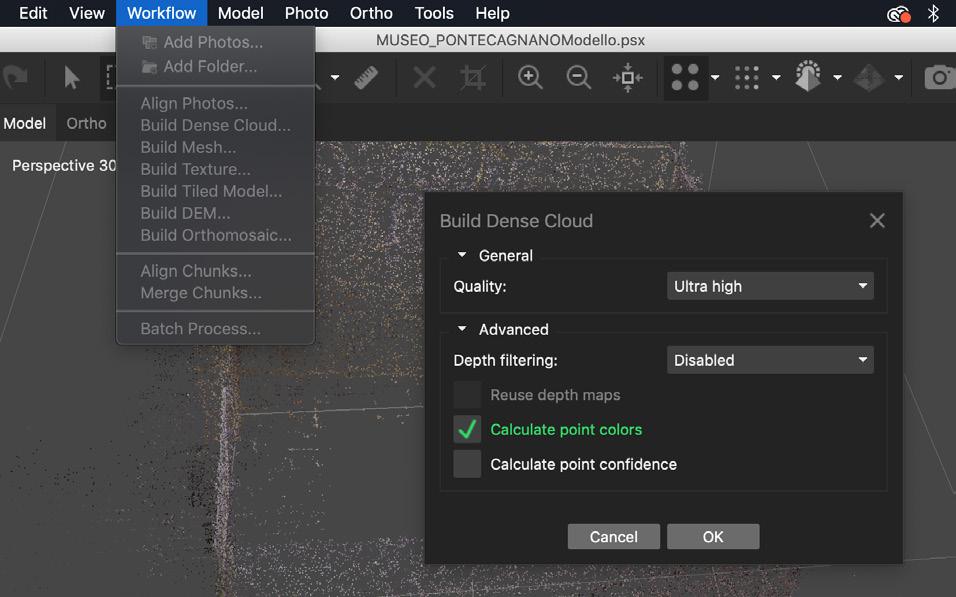
Dentro de la Dense Cloud en el gráfico 3.2.7a se pueden observa puntos negros en ajenos a la tumba. Estos posteriormente se limpian haciendo cortes de la nube de puntos.
Luego, como describo en el capitulo 2, viene la generación de la mesh, pero primero en este caso se aprovechó el relevamiento ya hecho del Escaneo Laser para alinear este modelo, darle escala y geo-posicionarlo en relación al otro.
Esto se hizo así primero porque se buscaba superponer las meshes para obtener la textura de la fotogrametría sobre la Mesh del Escaneo Laser, segundo porque los datos del relevamiento con escaneo

6 5
Gráfico nº3.2.6 - Build Dense Cloud.
Gráfico nº3.2.8 - Abajo Zoom a las pinturas.
Gráfico nº3.2.7 - Dense Cloud.
poseen una medida métrica real en un sistema de referencia local.
Para lograr alinear la Cloud point se deben visualizar al menos 4 puntos por cara que pertenezcan al mismo plano, deben poder visualizar fácilmente los mismos puntos en las dos nubes y que tengan el menor error posible. Teóricamente es sencillo individuar el mismo punto en dos nubes, pero cuando la mesh posee una coloración diferentes, deben seleccionarse próximo a la esquina del plano y que ese punto sea fácilmente individualizado para disminuir al máximo el margen de error; todo esto dificulta la selección y la elaboración.
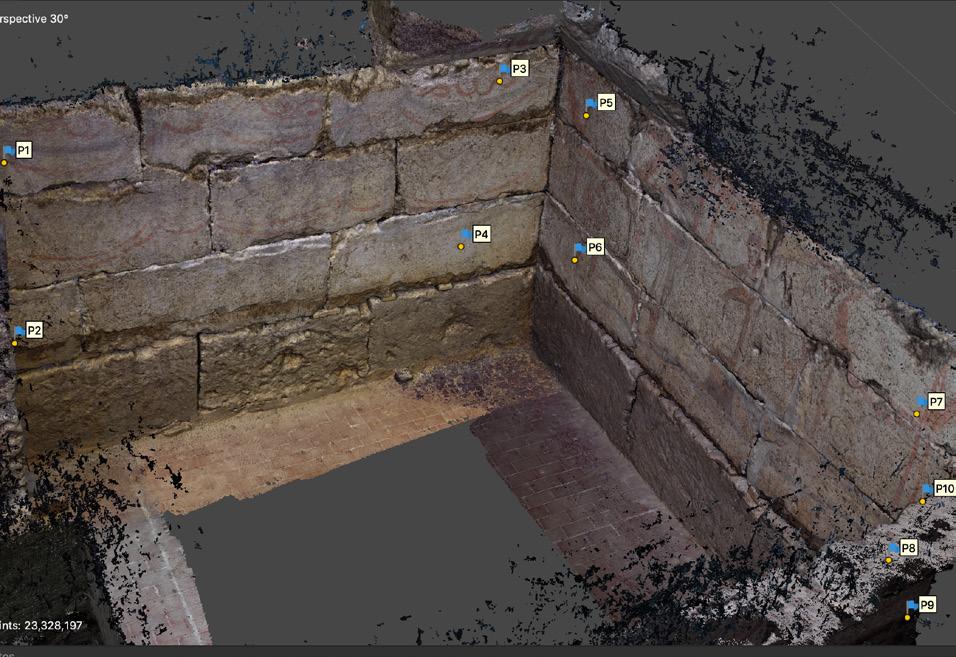
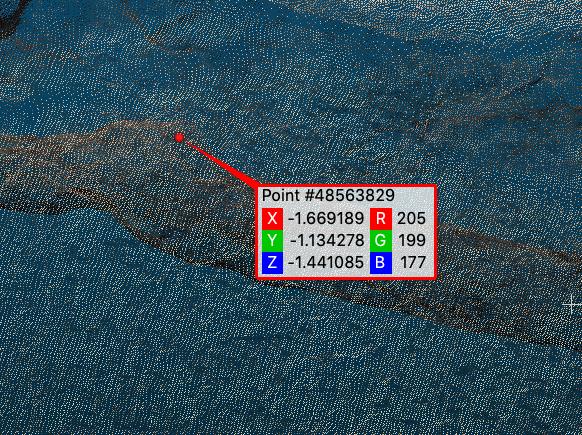
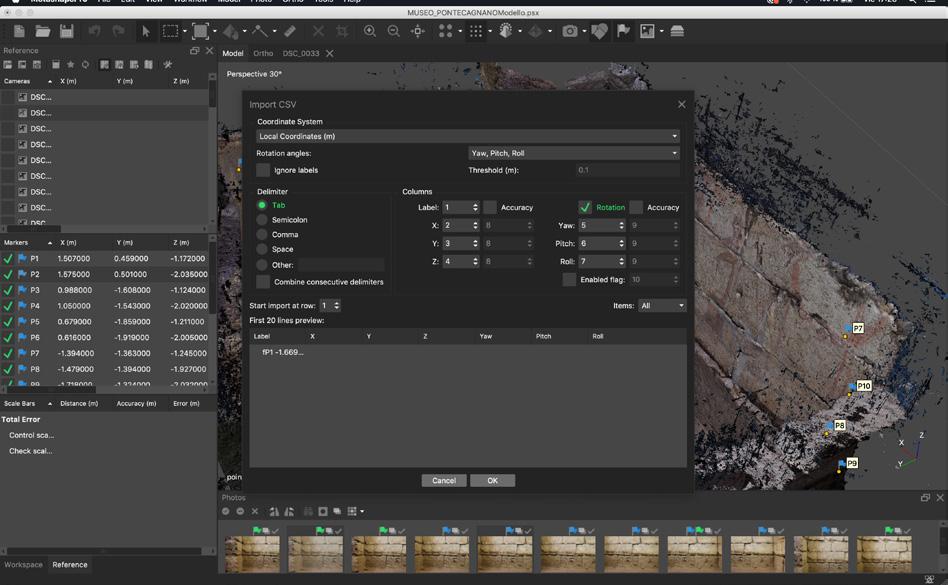
Para seleccionar los puntos se utilizó Cloud Compare, con la herramienta point picking se selecciona el punto, se copian las coordenadas y se hace un archivo con formato .txt con todos los puntos tomados.
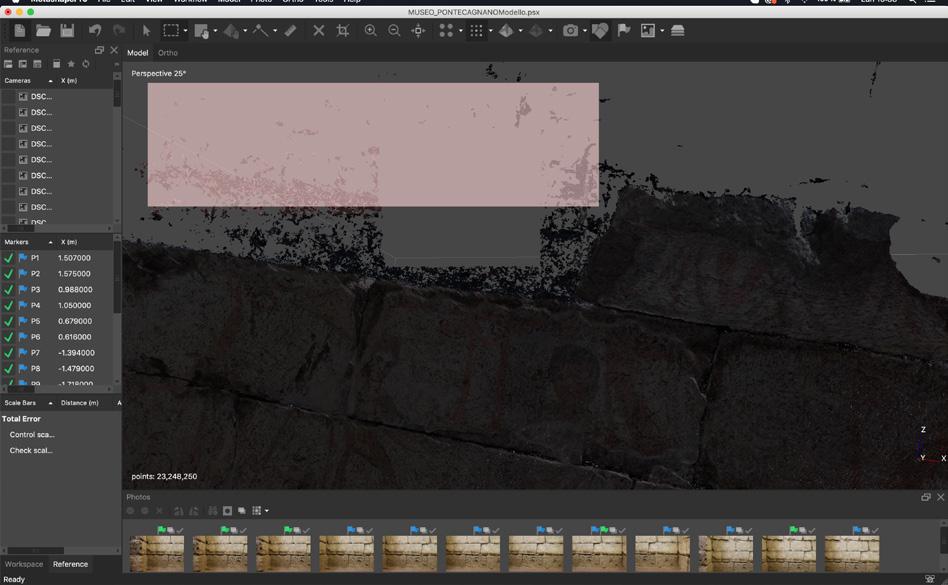
Luego en Metashape se agregan los mismos puntos por la nube, boton derecho del mouse y Add Mark, los Markers deben
tener exactamente el mismo nombre como han sido escrito en el .txt, debemos asegurarnos que en más de una foto se encuentra correctamente ubicado el punto.
Gráfico nº3.2.9 - Punto seleccionado en Software Cloud Compare.
6 6
Gráfico nº3.2.9 - Markers en Dense Cloud.
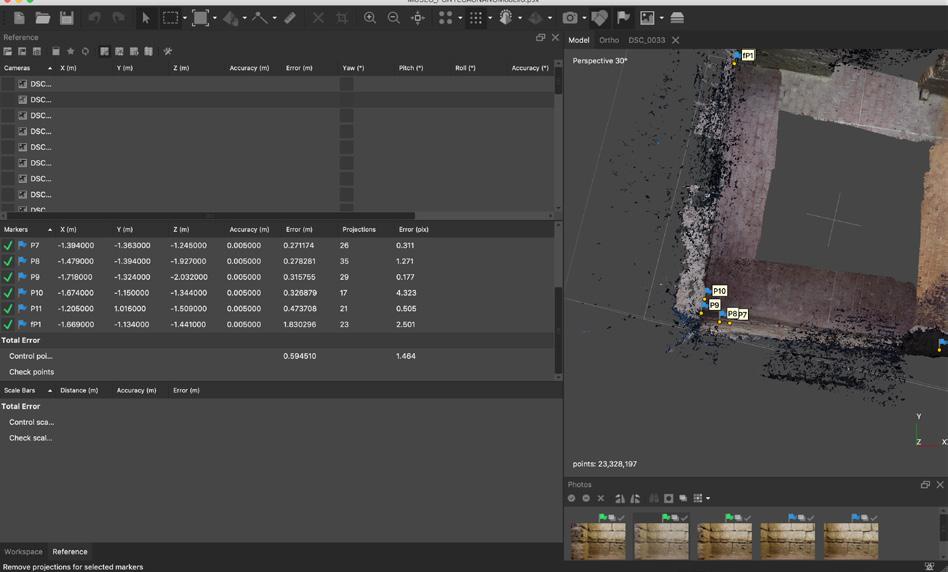
A continuación se importa el archivo .txt Gráfico 3.2.10 y aparecerán todos los puntos en coincidencia si tienen el mismo nombre y nos dara el margen de error del punto. En el caso del grafico 3.2.11 el software no reconoce el punto porque hay que configurar el delimiter con Space luego de conectarlo clickeamos Ok. Aparecerán todos los valores del marker cargado, en este caso el fP1 posee un error de 1.83m. Por lo tanto se debería repetir el método hasta llegar a un valor de error aceptable, en el orden de los 0.05 m o menos.
Completado el paso de hacer los Marker Point, significa que ahora tenemos geolocalizado la tumba en relación a la posición tomada por el GPS1, y por lo tanto lo tenemos en verdadera escala.
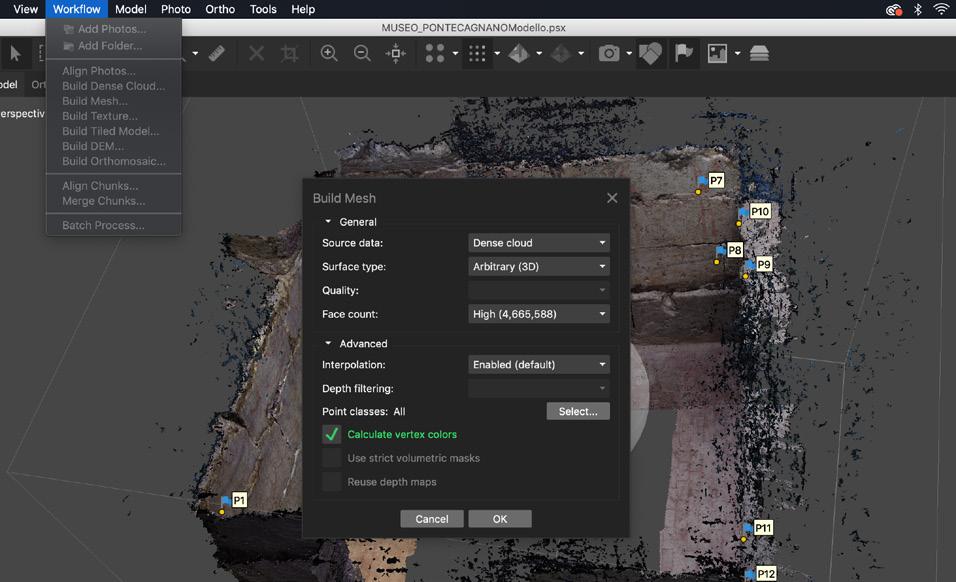
Continuando con el armado del modelo 3D, el siguiente paso es calcular la Mesh por el software, para esto se usaron las configuraciones que se ven el Gráfico 3.2.13 y luego del procesamiento de significativas horas se obtuvo el resultado de la malla de 10.000.000 millones de caras. Si
1 GPS. Siglas de Global Positioning System.
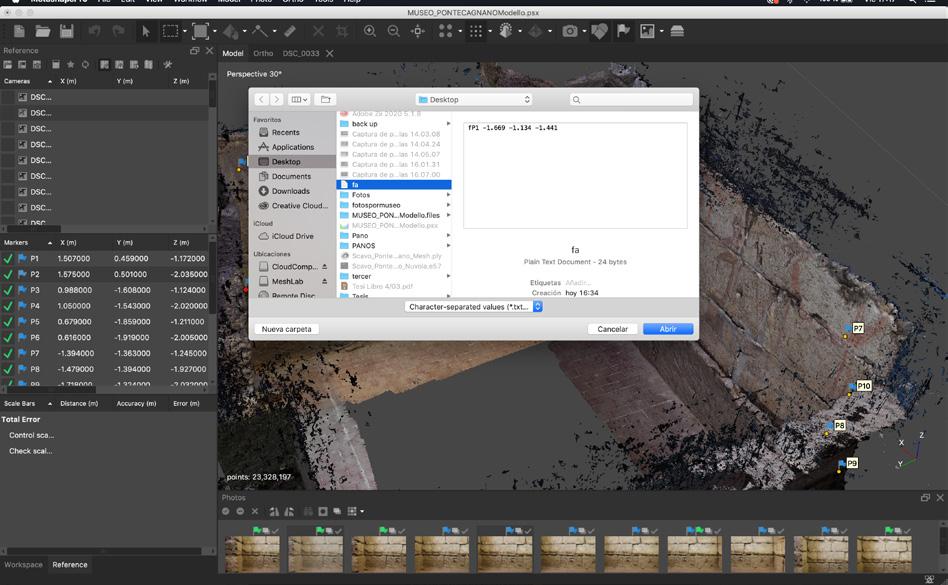 Gráfico nº3.2.10 - Import Reference formato TXT.
Gráfico nº3.2.11 - Markers en Dense Cloud.
Gráfico nº3.2.10 - Import Reference formato TXT.
Gráfico nº3.2.11 - Markers en Dense Cloud.
6 7
Gráfico nº3.2.12 - Marker nuevo fP1.
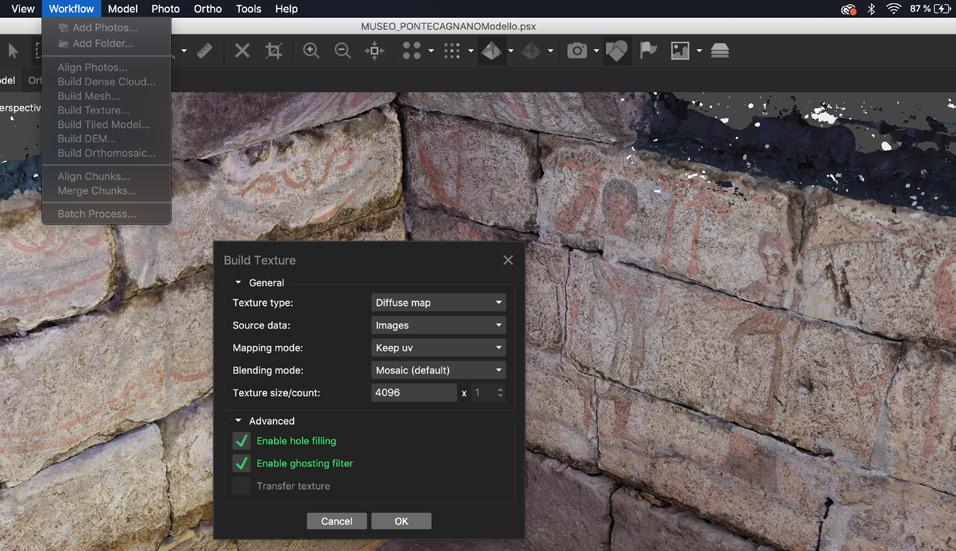
se compara con el modelado obtenido con Escaneo Laser, que posee la misma cantidad de caras, podemos concluir que la calidad de esta nueva Mesh es superior, dado que la superficie es menor. Como último paso, el que nos interesa a nosotros, es construir Build Texture donde hay que seleccionar el Keep UV, para luego tener las coordenadas de la textura, seleccionar el Source data a Imágenes porque nuestra información para la textura será tomada de las imágenes de la fotogrametría y el Texture size. En este caso se eligió el enable hole filling pero puede ser contraproducente porque hace una aproximación de la textura y rellena un agujero suponiendo que era igual en ese punto a su alrededor. Esto podría causar errores o falsos históricos. La textura como resultado se ve en el Gráfico 3.2.15.
Luego se probó generar una fusión entre la textura nueva y el modelo de la excavación pero no se obtuvieron buenos resultados. Esto se debe a que en el levanmiento y posterior reposicionamiento de

6 8
Gráfico nº3.2.13 - Build Mesh.
Gráfico nº3.2.14 - Build Texture.
Gráfico nº3.2.15 - Textura final archivo PNG.
la tumba se modificó la geometría general del objeto, aunque sea por pocos milímetros, esto causo un geolocalización errónea que al final llevo a una fusión incorrecta de la textura.

En el Gráfico 3.2.16, se ve el intento de fusion entre la mesh del Escaneo Laser y de la fotogrametría.
Se observa como hay zonas de la nueva textura que quedaron detrás de las paredes del modelo anterior demostrando la problemática expresada previamente. Cuando se intentó fusionar las meshes por, este mismo problema, se generaron figuras geométricas triangulares entre las dos caras de las paredes.
6 9
Gráfico nº3.2.16 - Superposición de Meshes en CloudCompare.
Luego de reiteradas pruebas concluimos que no iba a ser posible fusionar las meshes. Por lo tanto se decidió continuar generando las orthophotos de la mesh, que por un lado las necesitaban en el museo y por otro se puede probar con estas proyectarlas sobre la mesh del Escaneo Laser.
Para continuar con las orthophotos primero se generó una limpieza de las partes negras de la mesh generadas por el vació. Para esto se seleccionaron a mano en la nube de puntos y la mesh para luego re enviar el comando de build texture para tener la textura limpia.
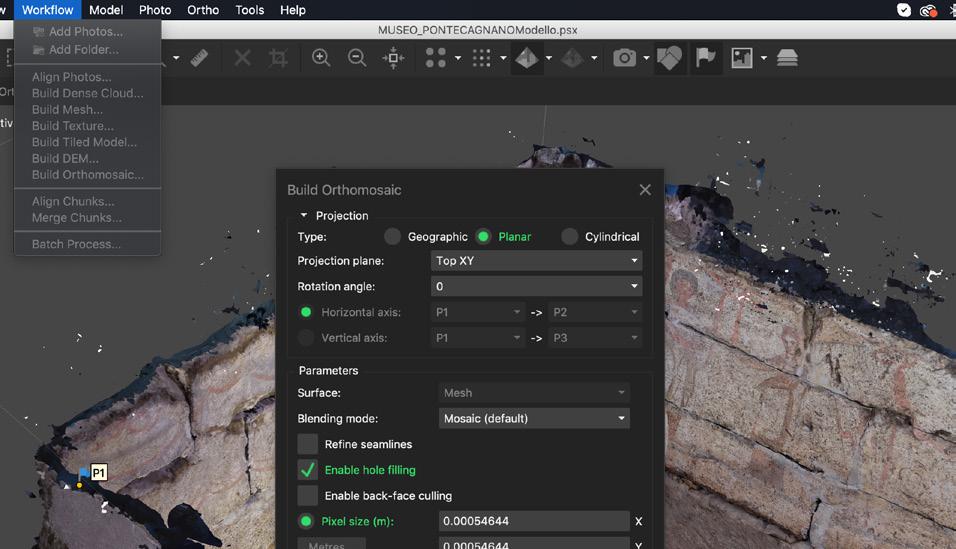
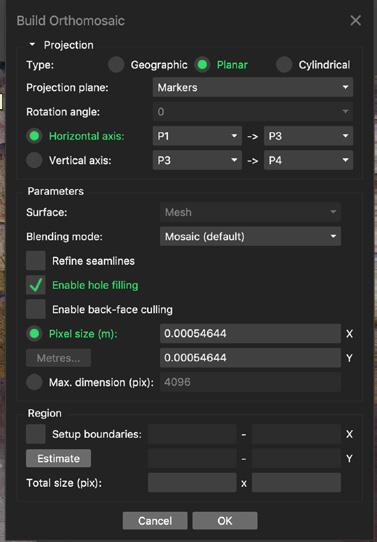
Luego se comienza el procedimiento de Build Orthomosaic, se selecciona Planar luego en Projection Plane Markers y utilizamos los markers que previamente asignamos, en el caso del ejemplo P1-P3 como eje horizontal y P3-P4 como eje vertical. Se modifica la dimensión del Pixel que se desea y se procesan las imagenes.
Las Orthofotos luego para finalizar, se editaron en un software especific para
7 0
Gráfico nº3.2.17 - Limpieza de la Cloud Point.
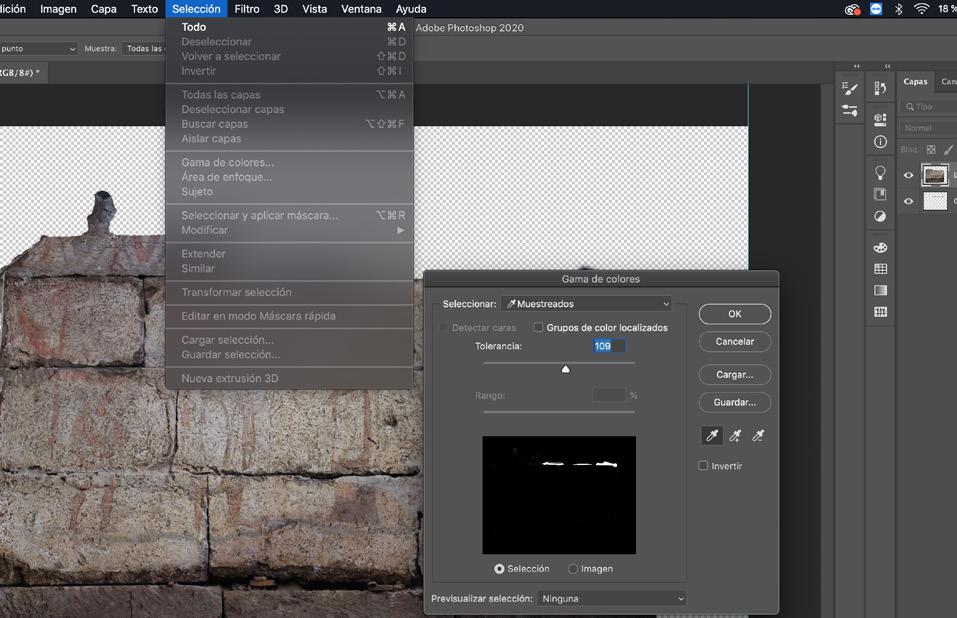
Gráfico nº3.2.19 - Selección por gama de colores.
Gráfico nº3.2.18 - Build Orthomosaic.
la edicón de imágenes, Photoshop. El trabajo en este software se dividió en 2 fases; la primera para terminar de limpiar las zonas de la foto que eran parte del entorno (zonas azules o negras en la imagen) esto se hizo la gran mayoría partir de selección de gama de colores, como se puede observar en el Gráfico 3.2.19, seleccionando el color y ajustando la tolerancia. Luego se borro a mano con la herramienta “borrador” las partes faltantes.
La segunda fase se editó la saturación de los colores principalmente el rojo de la textura para resaltarlos del material. En el gráfico 3.2.21 se ve la diferencia entre la parte editada y sin edición.

7 1
Gráfico nº3.2.20 - Herramienta Tono/Saturación.
Gráfico nº3.2.21 - Antes y después de la edición.
3.3 Nivel III
R econstrucción: Elaboración de datos
Esta sección habla netamente de la reconstrucción, el trabajo se hizo en conjunto con el Dr. Arqueólogo Alfonso Santoriello profesor asociado en el sector científico disciplinar L-ANT/10 “Metodologia della ricerca archeologica” de la Università Degli Studi di Salerno y con la Dra.

Arqueóloga Luigina Tomay funcionaria arqueóloga directora del “Polo Museale della Campania” (MiBACT).
Esta fase se decidió utilizar el modelo producido con escaneo laser, dado que la mesh posee el entorno circunstante inmediato y además se encuentran los bloques de travertino modelados tanto del interior de la tumba como del exterior, que esto facilita tanto la visualización final como la modelación del objeto.
Para la reconstrucción se utilizara el software Blender, donde se importó la mesh y como un .ply dado que había sido exportado asi.
7 3
Gráfico nº3.3.2 - Esquema reconstrucción de bloques faltantes.
Gráfico nº3.3.1 - Tumba 9890 con vertex color visibles, relevamiento tomado con escaneo laser.
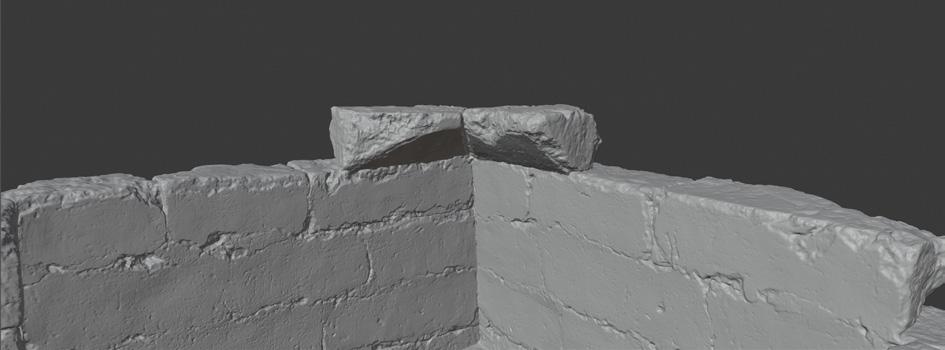
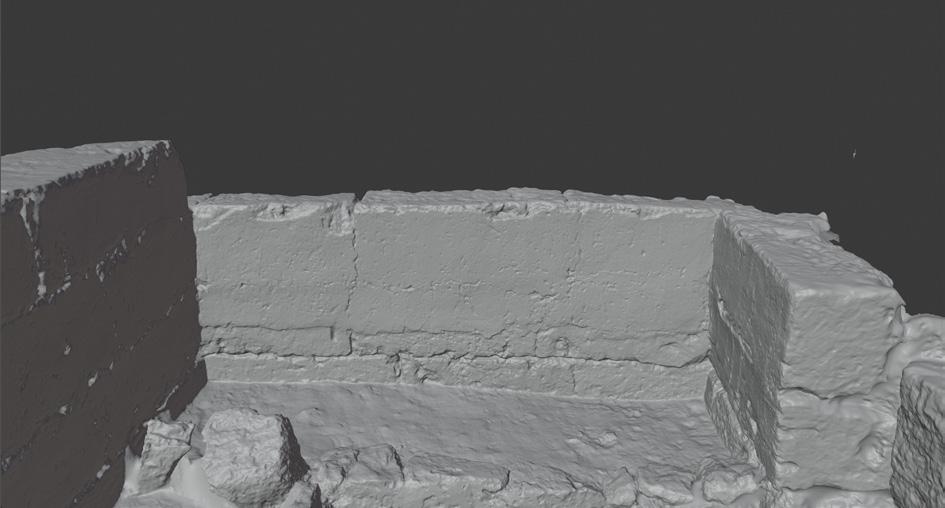
Iniciando el proceso de reconstrucción se decidió hacer el completamiento de los bloques faltantes en las filas. Se supone que los bloques faltantes continúan con el mismo orden y la misma geometría, los que hoy todavía se encuentran en la tumba 9890. Como se ve en los gráficos 3.3.1 y 3.3.2.
Por lo tanto se individualizaron
2 tipologías de bloques (Gráfico 3.3.4 y 3.3.6a/b) en diferentes filas. La fila faltante nº1 se encuentra en la pared a la derecha del ingreso (gráfico nº3.3.3, mientras que la fila nº2 (gráfico nº3.3.5) se cree que rodeaba toda la tumba.
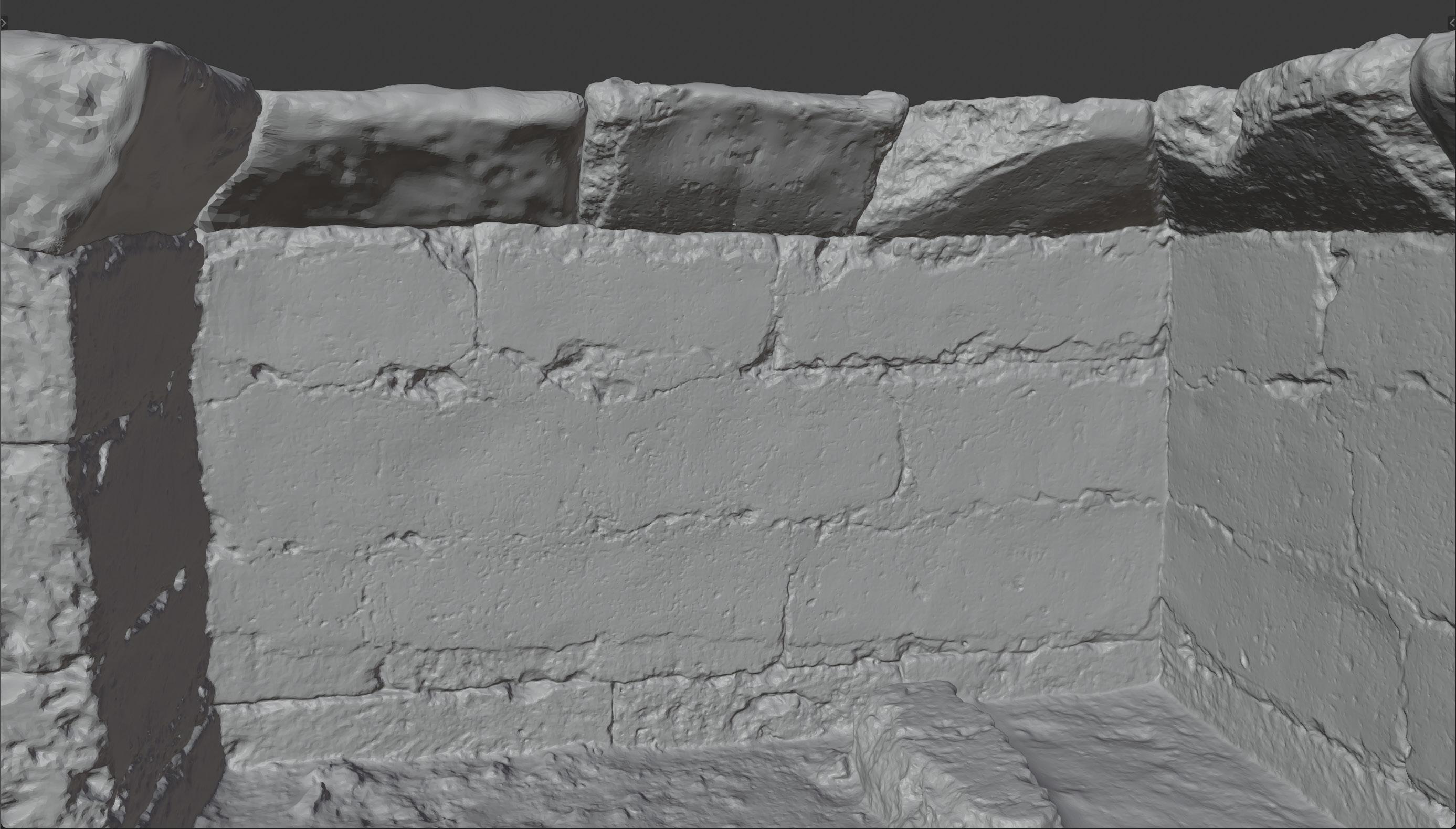
Una vez reconocidos los elementos faltantes y las tipologías se continuó a modelar a partir de hacer un esculpido o sculpting manual pieza por pieza de las faltantes.
Para esto como primer paso se selecciono una parte de la mesh que contenía el bloque a replicar (Gráfico 3.3.7), luego se duplicó el mismo, se colocó en el lugar donde debía ser ingresado y se
7 5
Gráfico nº3.3.3 - Esquematización de fila faltante nº 1 de bloques de Travertino.
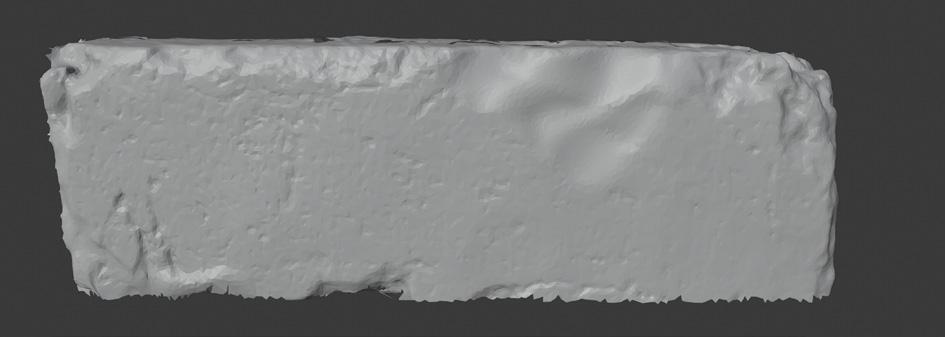
Gráfico nº3.3.4 - Tipo de bloque de travertino 1.
Gráfico nº3.3.5 - Esquematizacion de fila faltante nº 2 de bloques de travertino.
Gráfico nº3.3.6 a/b -Tipologia bloque travertino 2.
esculpió minuciosamente para dejar el bloque lo mas simil a la superficie existente, pero aleatoriamente se modificaron pequeñas cosas para darle heterogeneidad a los bloques entre ellos, para no generar una repetición de patrones entre ellos. En los gráficos siguientes (3.3.7 y 3.3.8) se ve la reconstrucción de las filas faltantes.
7 5
Gráfico nº3.3.7 - Pared derecha de la tumba 9890, primera fase de reconstrucción.
Gráfico nº3.3.8 - Pared izquierda de la tumba 9890, primera fase de reconstrucción.
Hipótesis reconstructivas
En esta fase experimentativa y explorativa donde se produjeron diversas hipótesis constructivas, de la tumba. Donde se trabajó en conjunto con especialistas en arqueología.
Para esto se partió de plantear propuestas según antecedentes de las tumbas conocidas coetáneas, por ejemplo la de la Tumba de Cuma1, y se hicieron pruebas geométricas basadas en la lógica constructiva de la época.
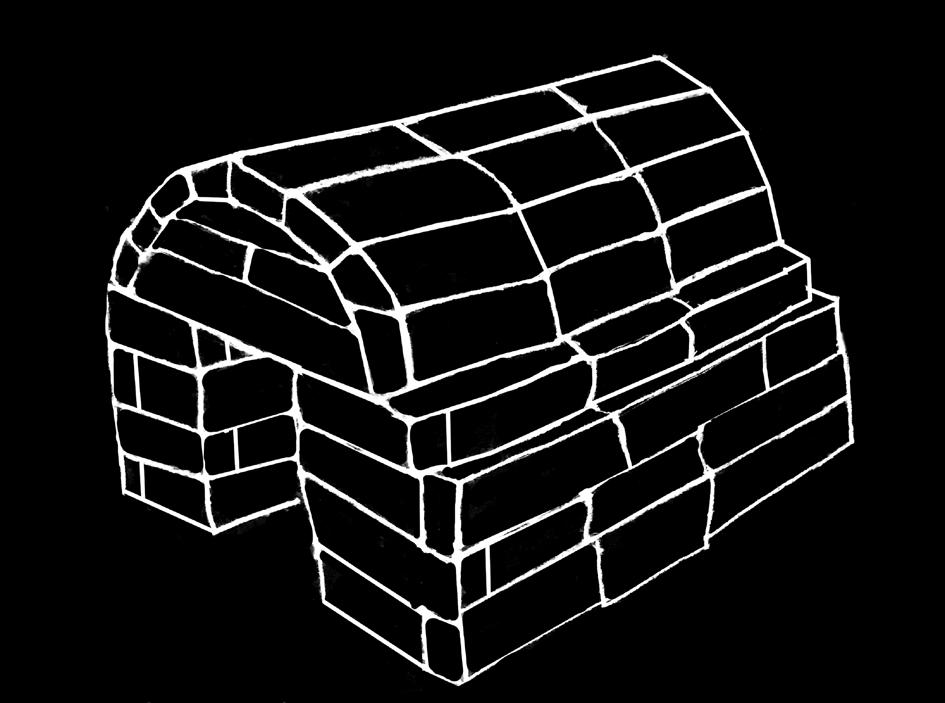
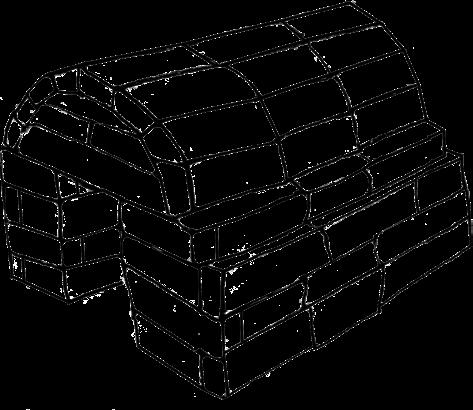
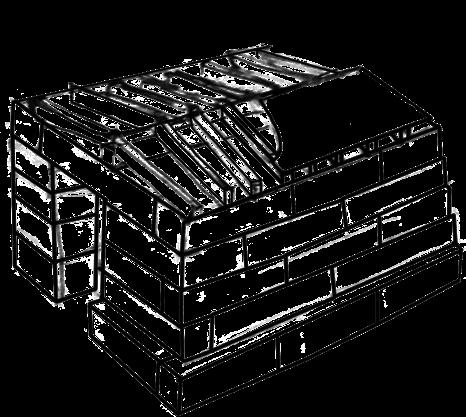
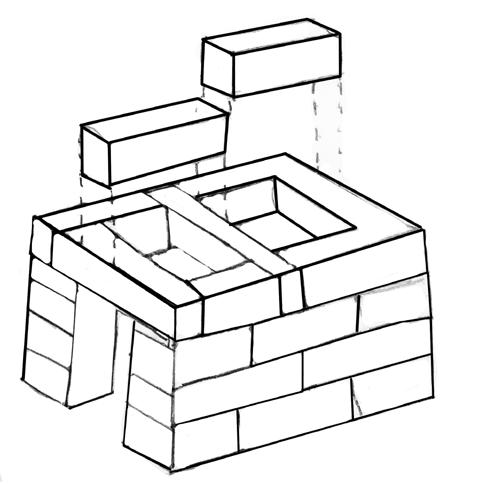
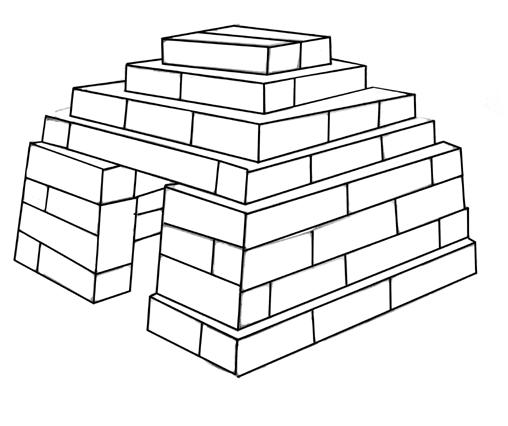
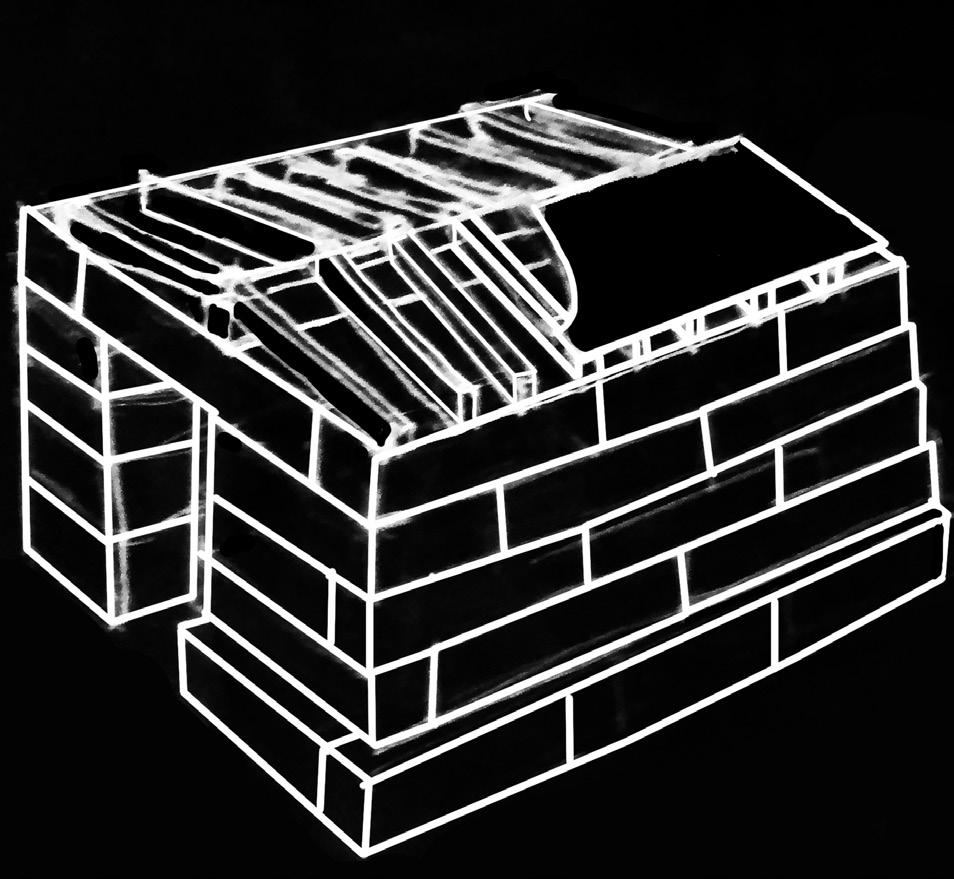
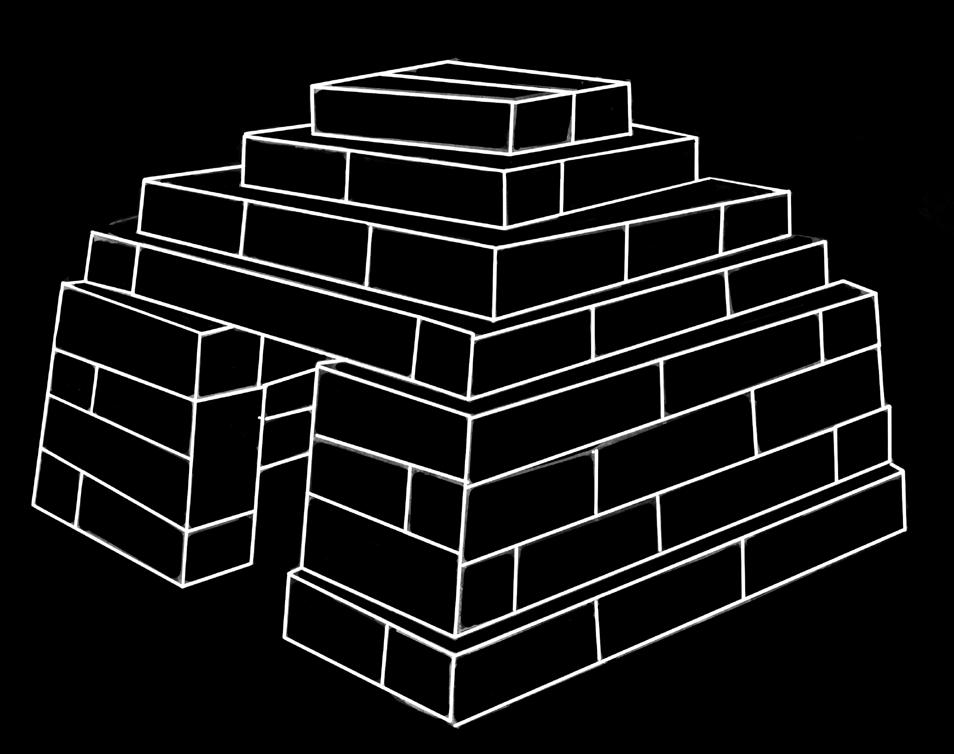
Las propuestas planteadas fueron hechas con dibujo a mano, donde se esbozaron conceptos de posibles tipologías de coberturas con los materiales de la época. Se dibujaron A) bóveda a cañón corrido (Gráfico 3.3.9), B) cerramiento tipo pirámide (Gráfico 3.3.12), C) techo plano de piedra (Gráfico 3.3.11) y D) techo a dos aguas con vigas de madera y terminación de madera (Gráfico 3.3.10).
1 Una tumba a Cuma con frescos datada en el Siglo II a. C., donde las pinturas conservadas perfectamente inmortalizan una escena banquete. Cuma, dos veces más grande que Pompeya, se encuentra a 25 km al oeste de la ciudad de Nápoles, se encuentra dentro del Parque Arqueológico de Campi Flegrei. Según fuentes históricas, es la colonia griega occidental más antigua, fundada a mediados del siglo VIII a. C.
Gráfico
Gráfico nº3.3.9 - Bóveda caño corrido dibujo a mano vectorizado en Photoshop.
nº3.3.10 - Techo a dos aguas dibujo a mano vectorizado en Photoshop.
La hipótesis A (bóveda cañon corrido) es una de las opciones más factibles en contraste los antecedentes de tumbas, por lo tanto se decidió seguir haciendo pruebas sobre esta.
La opción B (piramide) se descartó por falta de coherencia constructiva con la arquitectura de la época, aunque posee una lógica en respecto a los elementos constructivos.
La reconstrucción C (techo plano de piedra) fue descartada por la falta de coherencia con los elementos constructivos actuales, no hay indicios de que hayan existido vigas que atraviesen la tumba.
La última hipótesis, la D(techo de dos aguas), se decidió que era posible la idea de los elementos constructivos, así que continuó a la prueba siguiente.
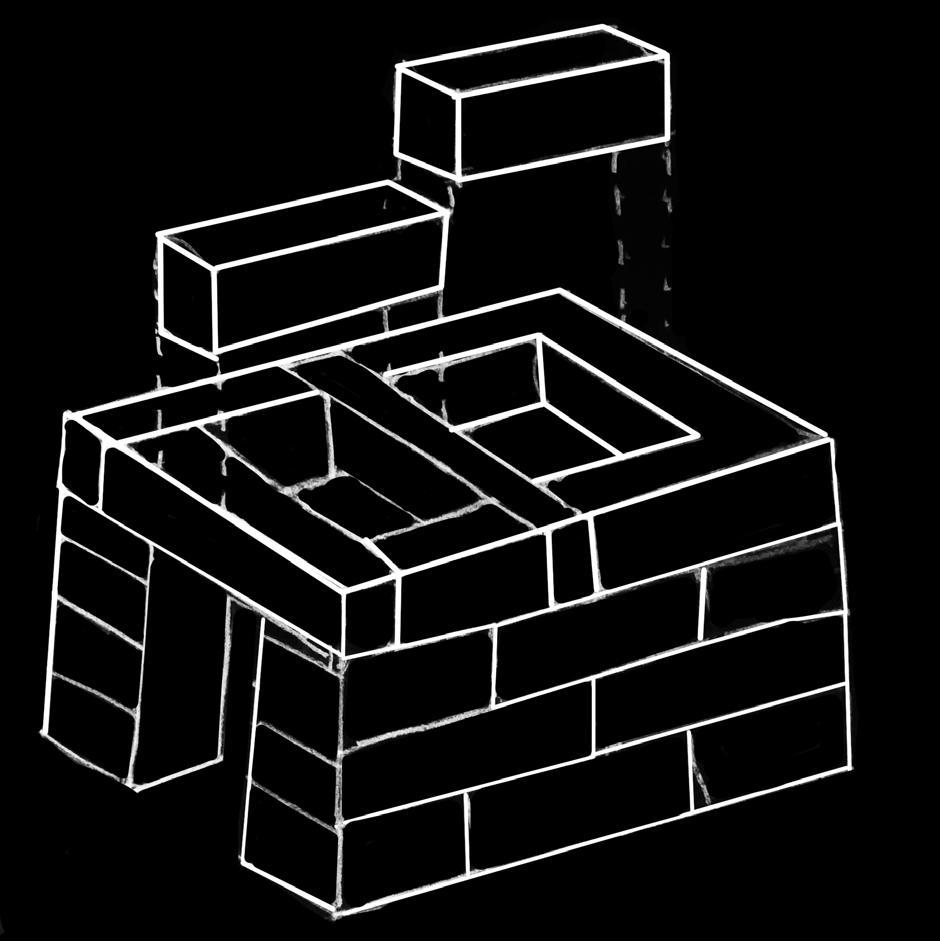 Gráfico nº3.3.11 - Techo plano dibujo a mano vectorizado en Photoshop.
Gráfico nº3.3.11 - Techo plano dibujo a mano vectorizado en Photoshop.
7 7
Gráfico nº3.3.12 - Tipología pirámide dibujo a mano vectorizado en Photoshop.
Con las propuestas más factibles se hicieron pruebas geométricas con un software de dibujo técnico, AutoCAD, donde primero se comprobó la opción del bóveda de cañón corrido, luego se hicieron con medidas exactas las propuestas de cubierta plana.
Para comenzar a trabajar a Autocad primero se hizo una sección de la nube de puntos, generada por escaneo laser, en Cloud Compare (Gráfico 3.3.13 luego se importo a Recap para cambiar el formato a .rcp1 y luego se importó a Autocad.
En AutoCAD se dibujó la sección calcando las lineas significativas que describían geométricamente los elementos constructivos de la tumba.
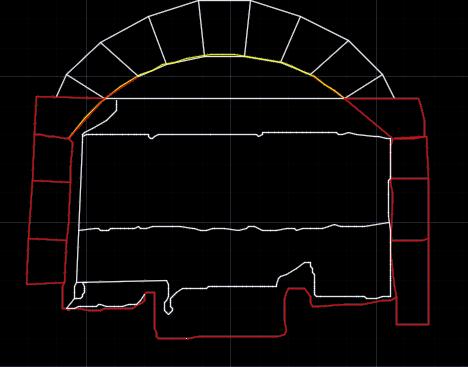
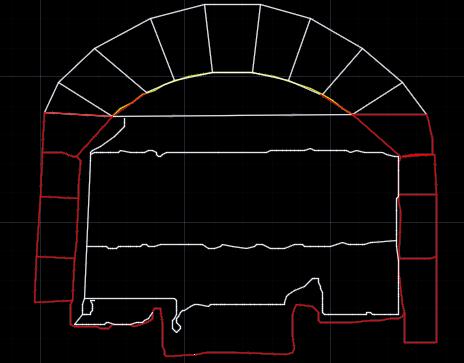
Luego se paso a generar la diversas hipótesis de reconstrucción, primero se hizo el arco de 3 puntos para comprobar la bóveda a cañón corrido simulando la curva funicular2 del arco. Probando dos maneras, donde sólo cambia la dimensión de los bloques utilizados y por lo tanto el peso de

1 El formato .RCP es un formato del software Recap de Autodesk y es el único formato de nube de puntos que puede ser importado a AutoCAD.
2 Forma curva que adopta un cable al ser sometido a una carga vertical distribuida uniformemente. La inversa del cable genera el arco funicular.
Gráfico nº3.3.13 - Sección de nube de puntos de relevamiento in situ efectuado en el software CloudCompare, producida de la mesh del relevamiento hecho con escaneo laser.
Gráfico nº3.3.14 - Sección de la tumba 9890 dibujada , software utilizado AutoCAD. Calco de la sección del gráfico 3.3.13, los bloques adjuntos faltantes en el relevamiento se hipotizaron de esa manera, a partir de plantear un eje de simetría axial del objeto de estudio.

7 8
los mismos (Gráficos 3.3.15 y 3.3.16). Estas opciones fueron descartadas por su falta de lógica en el encuentro de lo existente y la cobertura nueva.
La siguiente hipótesis de techo a dos aguas con un sistema de vigas y cabreadas de madera (Gráfico 3.3.17) técnica constructiva usada en la época, con terminación de piedra que era típica de la civilización etrusca. Esta opción fue descartada por incongruencia entre la ultima fila existente y el sistema de vigas. Dado que el bloque tipo 2 (Gráfico 3.3.6) indica un recorte de la luz, probablemente para usar un elemento pesado, como piedra. Por lo tanto carece de sentido una estructura de madera que puede cubrir esa luz sin hacer el cambio en el tipo de bloques.
Otra opción fue, una mezcla entre la tipología a pirámide y la bóveda de cañon corrido (Gráfico 3.3.18). Donde continua la curva funicular y luego se genera un ultimo bloque más largo con la función de cierre.
Esta opción última opción se tomó como la más factible de esta primer aproximación.
7 9
Gráfico nº3.3.15 - Opción 1 de bóveda cañón corrido. En amarillo arco funicular generado a partir de 3 puntos.
Gráfico nº3.3.16 - Opción 2 de bóveda cañón corrido. En amarillo arco funicular generado a partir de 3 puntos.
Se decidió hacer un contraste entre la opción del gráfico 3.3.18 y una nueva opción encomendada por el Museo de Pontecagnano para verificar su factibilidad.
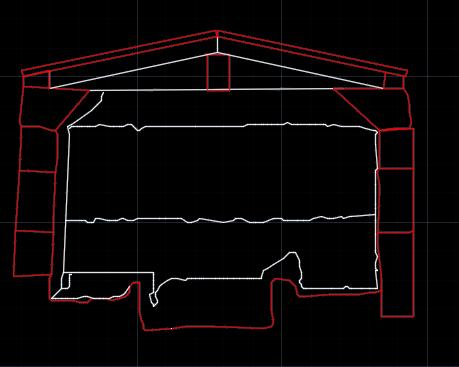
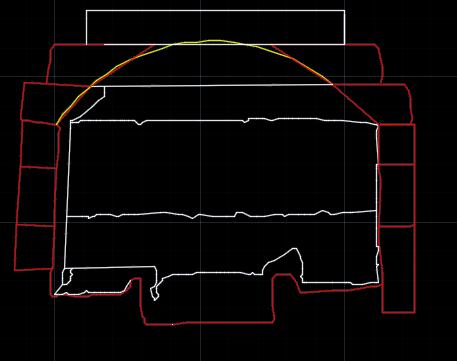
Esta nueva hipótesis Gráfico 3.3.19. Se basa en un entablonado de madera donde aprovecha el aumento en la sección de los bloques de piedra con terminación oblicua como apoyo. Pero se descarto porque es poco factible que la madera haya soportado las cargas de las piedras y de la tierra ella.
Por esto se decidió probar la hipótesis del gráfico 3.3.20, que es igual a la anterior descripta solo que se le agrega un sistema de vigas de madera para soportar las cargas previamente mencionadas. Sin embargo esta hipótesis carece de sentido con este tipo de bloques de travertino, dado que el encuentro entre la viga y la piedra (indicado por la flecha roja) queda incompleto con esta tipología de bloque y no se encontraron rastros de una resolución de este encuentro.
Gráfico nº3.3.17 - Hipótesis de techo a dos aguas con vigas de madera y terminación de piedra.
Gráfico nº3.3.18 - Hipótesis tipo piramidal continuando el arco funicular en los bloques de piedra.
8 0
Por lo tanto se concluye que la versión mas factible es la hipótesis tipo piramidel mostrada en el gráfico 3.3.21. La cual la única incógnita que queda sin resolver es la altura de la última piedra que cierra la estructura.
Esta ultima será la desarrollada a continuación, donde se hará la reconstrucción de la misma.
la reconstrucción.
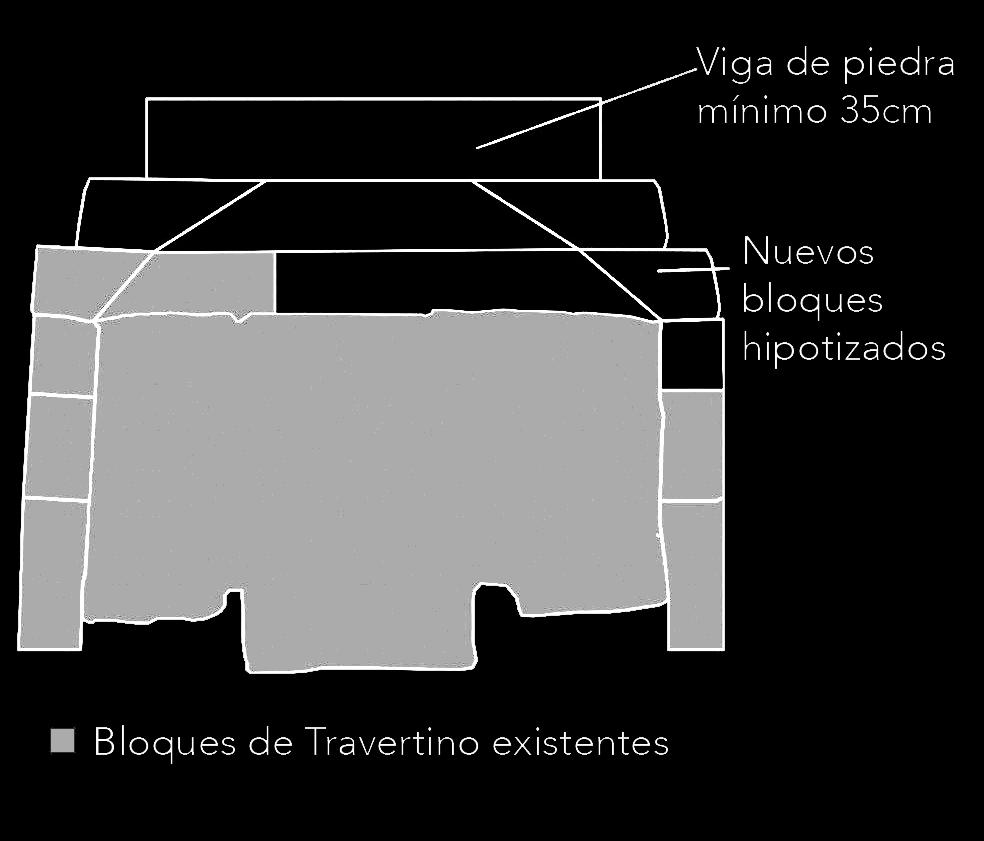
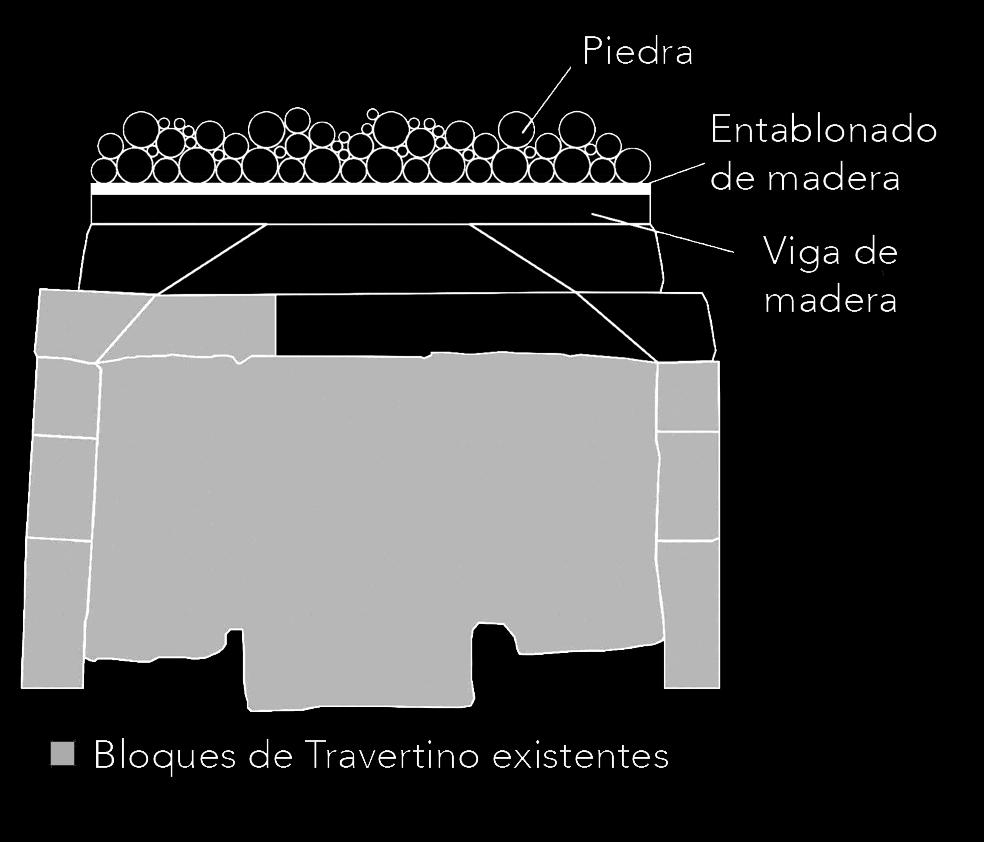
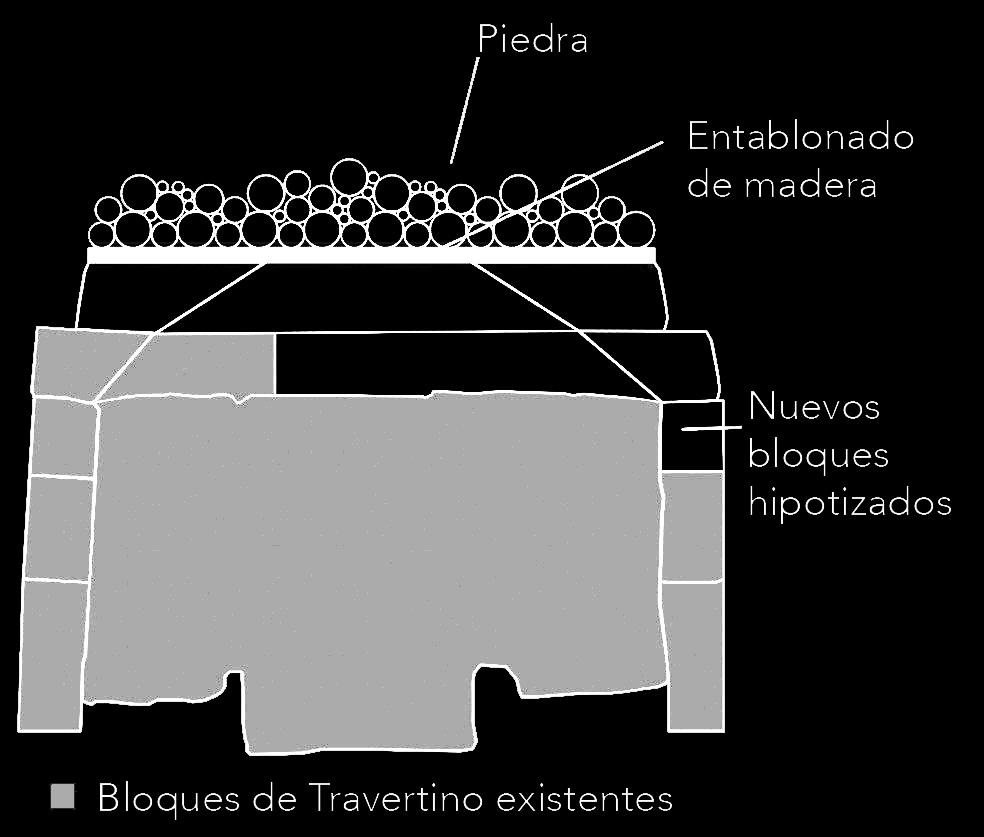 Gráfico nº3.3.21- Hipótesis tipo piramidal final, elegida para
Gráfico nº3.3.20 - Hipótesis entablonado de madera con vigas de madera.
Gráfico nº3.3.19 - Hipótesis entablonado de madera con terminación de piedras.
Gráfico nº3.3.21- Hipótesis tipo piramidal final, elegida para
Gráfico nº3.3.20 - Hipótesis entablonado de madera con vigas de madera.
Gráfico nº3.3.19 - Hipótesis entablonado de madera con terminación de piedras.
8 1
Esta anteúltima fase del Nivel III, es la fase de modelación de la reconstrucción. Donde se explica el modelado de dos bloques, solo se desarrollan dos dado que se utilizaron dos maneras para moldear todos los elementos del modelo.
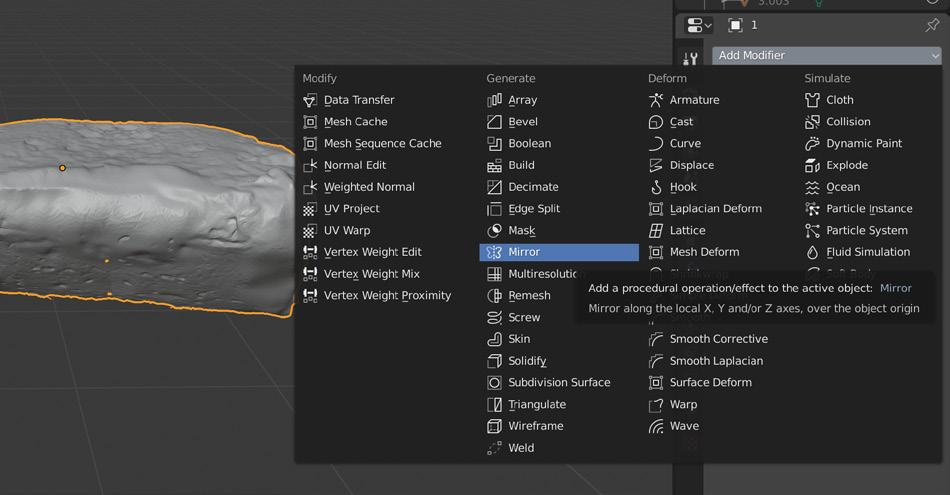
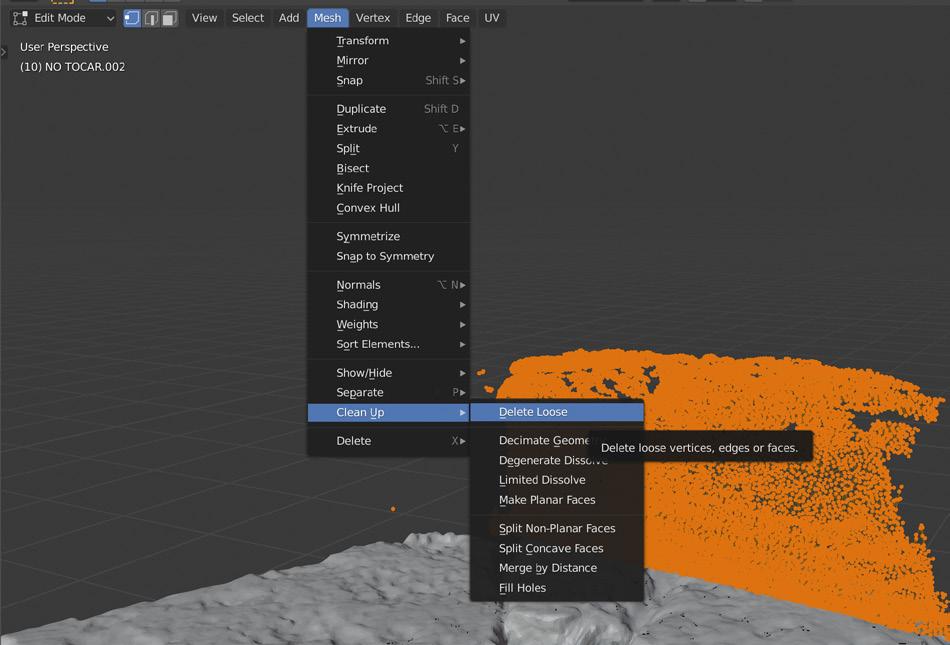
La primera a partir de la duplicación de uno existente (relevado por Escaneo Laser) y adaptación del mismo para la posición deseada. El segundo tipo de bloque se realiza a partir de la creación de una geometría nueva, para luego convertirlo en una mesh comparable (en numero de caras) con las mesh de bloques del otro tipo de modelado y, obviamente, los existentes; como último ,nuevamente, la misma fase de adaptación. Es importante aclarar que la fase de adaptación en las dos maneras se ejecuta más de una vez. Dado que cuando se insiere la textura hay que volver a modificar la geometría. Para comenzar la primera manera, se debe seleccionar y duplicar el bloque deseado y separarlo de la mesh original para tener el nuevo bloque como elemen-
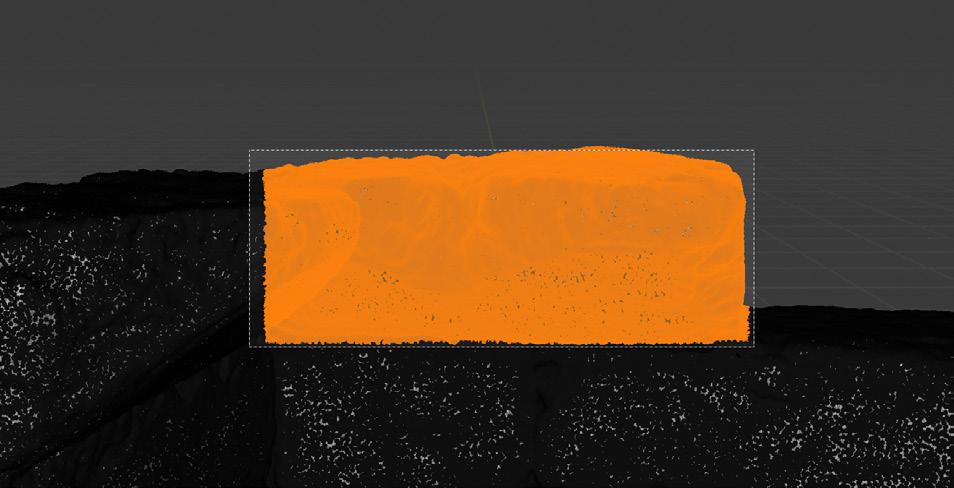
M odelación
Gráfico nº3.3.22- Modelación tipo bloque 1, por duplicación. Selección para duplicar.
Gráfico nº3.3.23 - Comando limpieza ejecutado Mesh -> Clean Up -> Delete Loose.
Gráfico nº3.3.24 - Modificadores ->Mirror.
to único. Luego se genera una limpieza general de eliminación de caras, vértices y ejes primero a través de la selección manual de ellos y luego se ejecuta un comando del modo Edit Mode llamado Delete Loose1 (Gráfico 3.3.23).
Luego se pasa a completar las caras faltantes, por experiencia se encontró que aplicar un Modifier2 de Mirror (gráfico 3.3.24) es la manera mas fácil para obtener una geometría editable sin errores de unión entre los vértices de la mesh (del bloque), que puedan generar posteriores problemas de agujeros en la misma. A la vez el modificador de Mirror asegura una geometría simétrica y, como en este caso esta duplicada de un bloque existente, más certera con la realidad.
Cuando se completa nuestro bloque se pasa posiciona en su lugar y se pasa a hacer el esculpido de la pieza, tanto para que quede inserido, geometricamente, lo
1 Comando de Blender 2.8 que elimina vértices, ejes o caras sueltos en la escena, segun configuración.
2 Los modificadores son operaciones automáticas que afectan a un objeto de una manera no destructiva. Con los modificadores es posible realizar de forma automática muchos efectos que de otra manera serían tediosos de realizar manualmente y sin que afecte a la topología base del objeto. Los modificadores cambian cómo se visualiza y procesa finalmente el objeto, pero sin tocar la geometría real del mismo.
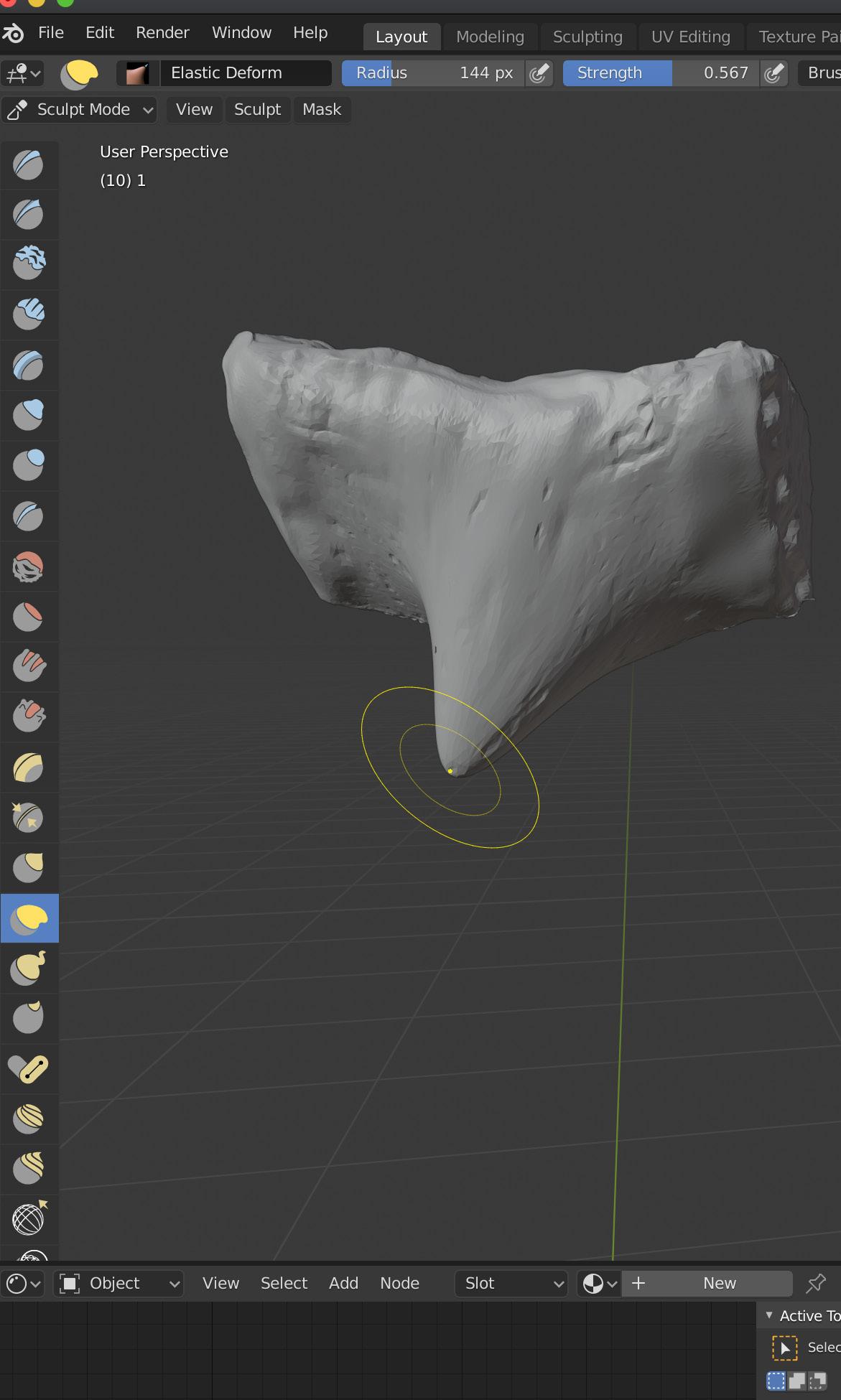
8 3
Gráfico nº3.3.25- Sculpt Mode y sus diferentes pinceles de edición. Radio del Pincel y Fuerza de la modificación deseada.
más real posible como para darle rasgos deformaciones típicas de la piedra para asemejarlo a un bloque real de Travertino. En el gráfico 3.3.25 se observa la herramienta Grab o agarrar dentro del Sculpt Mode y a la izquierda la variedad de herramientas para efectuar cambios con este modo. Lo más utilizados para este trabajo fueron: Grab, Smooth, Pinch, Multiplane
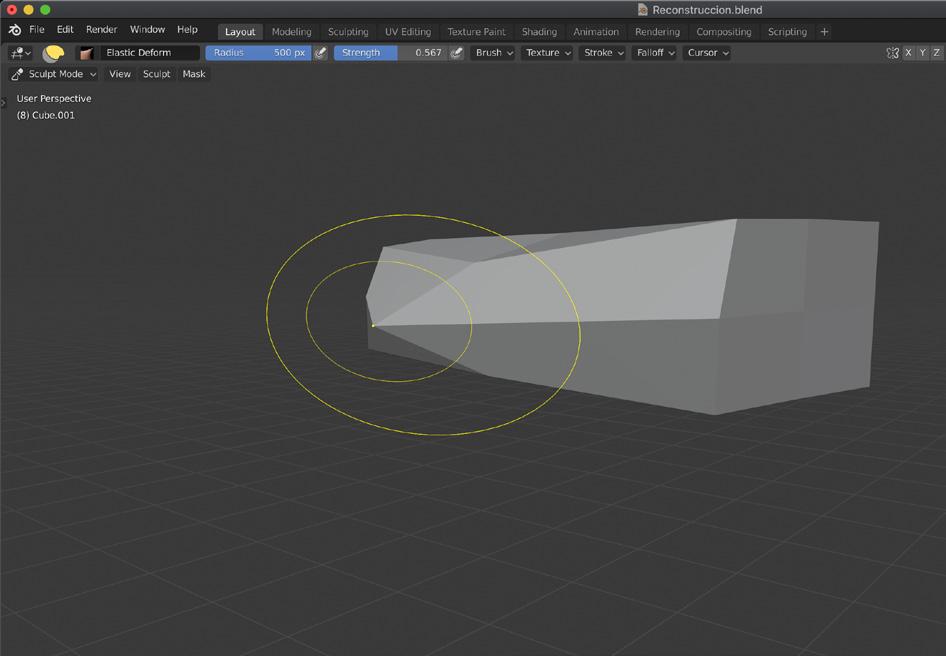
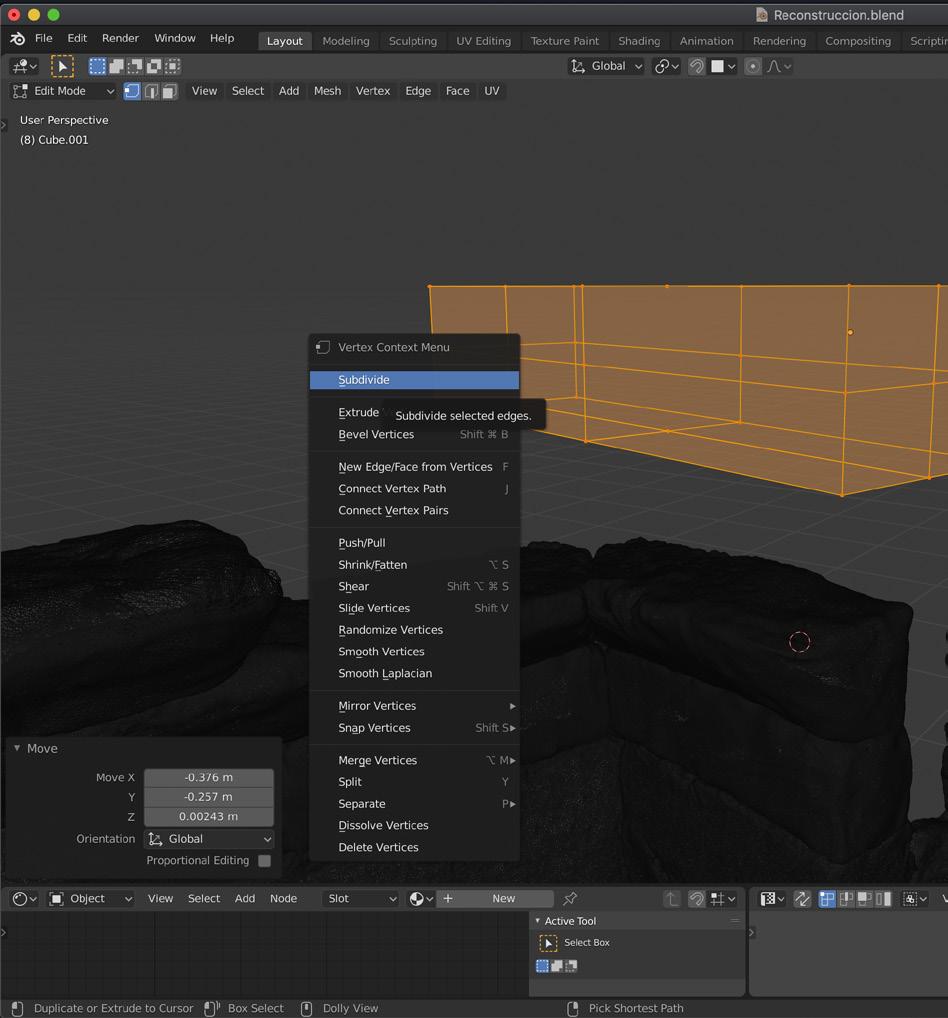
Scrape, Blob, Inflate y Flatten.
El segundo tipo de bloque fue generado a partir de una geometría base, un rectángulo, al cual se le aplicó un subdivisión de caras, como se indica en el gráfico 3.3.26. Lo importante de esta operación es hacer una subdivisión general de la geometría para luego poder usar las herramientas del Sculpt Mode. Es imprescindible la subdivisión de una geometría base si deseamos trabajar con la herramienta de Sculpt dado que todos los pinceles de la misma actúan sobre la posición de los vértices, como se ve en el gráfico 3.3.27.
La subdivisión se efectua en la forma en general y luego cuando se necesite
Gráfico nº3.3.26 - Subdivide en Blender: Selección malla -> Edit Mode -> Subdivide.
8 4
Gráfico nº3.3.27 - Sculpting de un poligono de 26 vertices. Herramienta Grab.
detalles en una zona en particular se aplica otra subdivisión zonal, así el elemento no será más pesado de lo necesario. Luego para la finalización de este elemento se continua de la misma manera que el primer tipo de bloque.
Mientras se hacía el modelo se fue evaluando la factibilidad de la propuesta piramidal. Como inicio se había partido con la idea de hacer solo una nueva hilera y luego cerrar con un arquitrabe de piedra.
Pero el modelo mostró incoherencias respecto este elemento de cierre. Porque suponiendo que todos los elementos poseían la misma altura, que es lo mas probable, un elemento rectangular de piedra de una dimensión de 40 cm aproximadamente de altura no podría soportar su propio peso y tierra encima de esta, en una luz a cubrir de 2.4 m. Esto se puede observar en el gráfico 3.3.29.
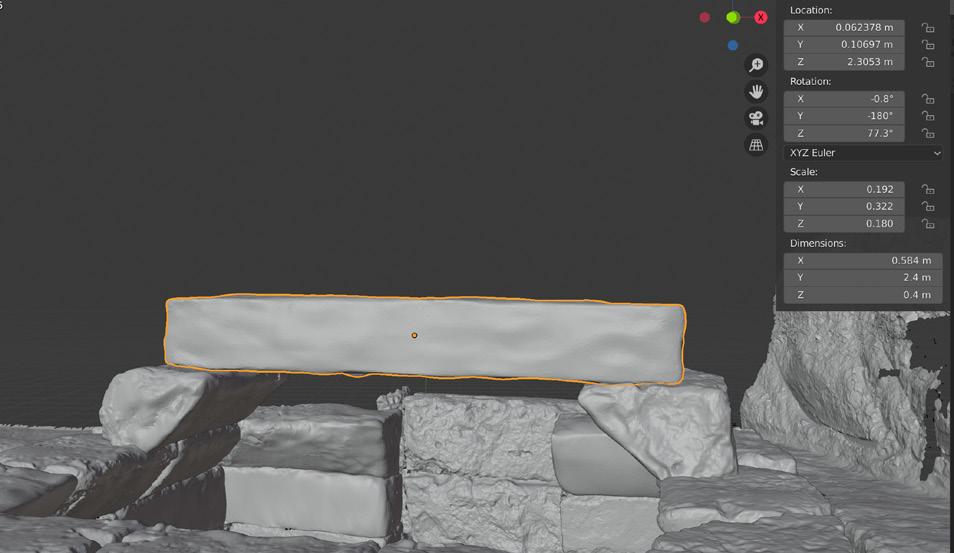
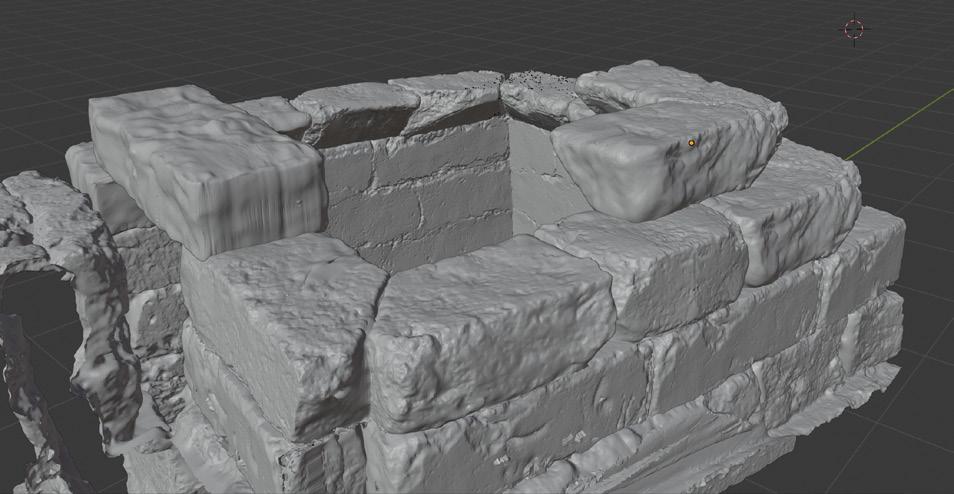
Este problema se discutió con los especialistas en arqueología y comparando con la tipología de tumbas cumanas, coetaneas a esta tumba, y se concluyó que
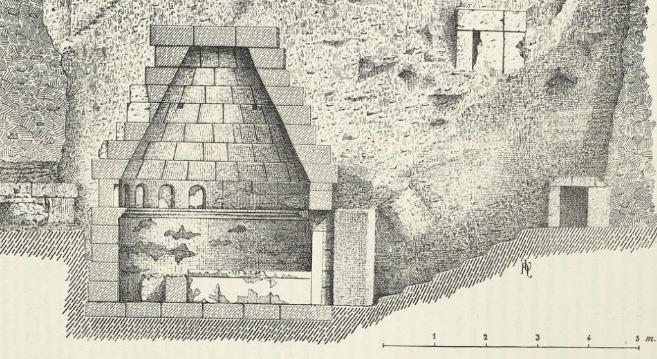 Gráfico nº3.3.28 - Reconstrucción primera hilera nueva sin bloques existentes.
Gráfico nº3.3.29 - Problemática de elemento estructural en piedra.
Gráfico nº3.3.28 - Reconstrucción primera hilera nueva sin bloques existentes.
Gráfico nº3.3.29 - Problemática de elemento estructural en piedra.
8 5
Gráfico nº3.3.29- Antecedente de tumba cumana. Cuma Magna Grecia, Campania (Italia).
probablemente poseía mayor altura, por lo tanto se agrego una nueva hilera a la reconstrucción y esto disminujo la luz del arquitrabe de piedra a 1.6 m. Luego de finalizar toda la reconstrucción geométrica
se incorporó el modelo externo efectuado do mediante escaneo laser para obtener el modelo final de la reconstrucción en el sitio donde se encontraba la tumba 9890.
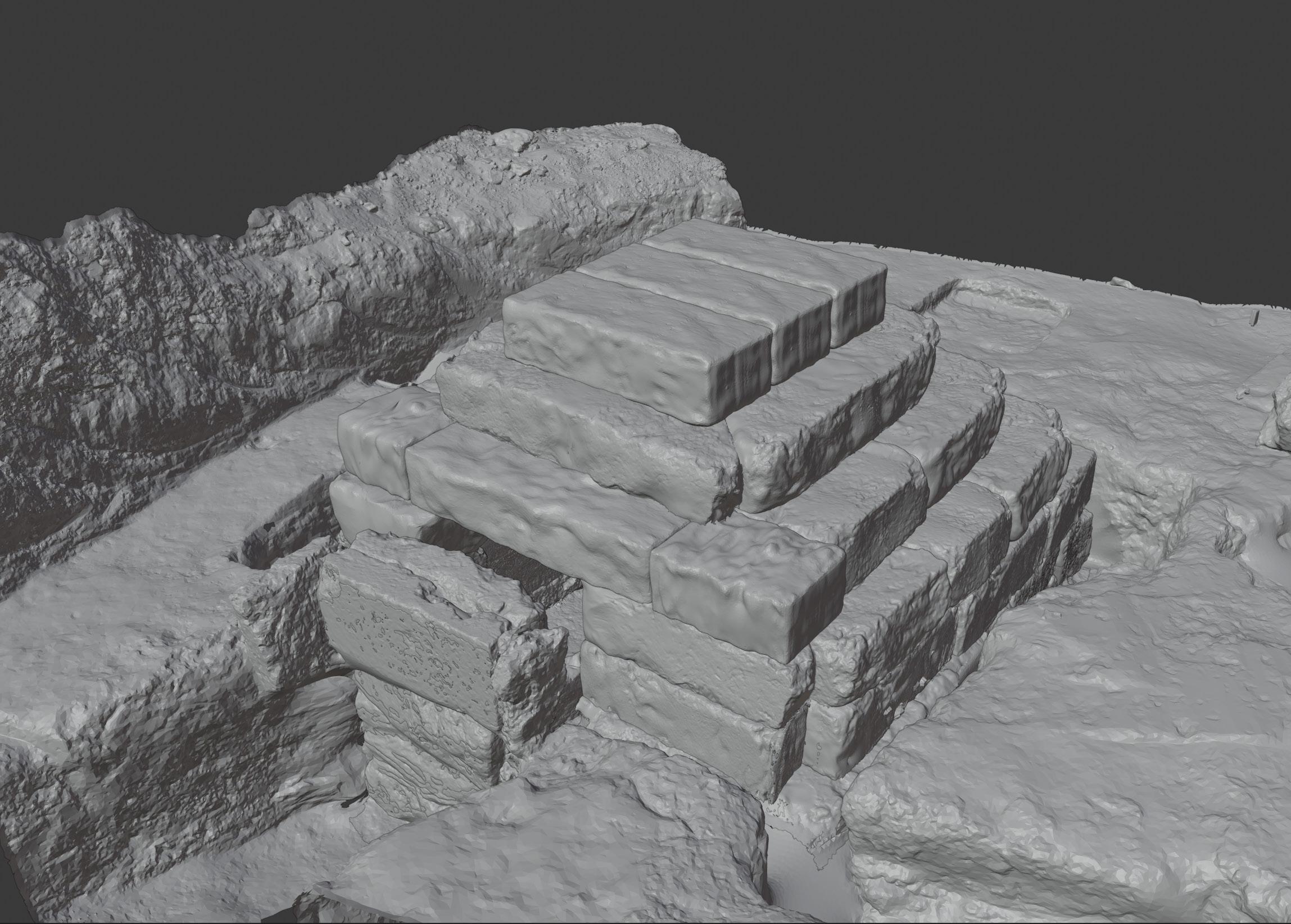
8 6
Gráfico nº3.3.27- Sculpting de un poligono de 26 vertices.
T exturización final
Esta última fase, la de texturización tiene una gran carga conceptual de programación de los Shaders o Nodos de las texturas PBR. Donde se explotaron y se implementaron las herramientas del entorno del renderizado y los Shaders, para un ambiente diferente al creado. Esto fue hecho para generar y proponer un espacio virtual de trabajo para la arqueología, en este caso.
Esta fase es la de fusión de todos los datos obtenidos y desarrollados en todo el proceso de este trabajo de tesis. Donde se experimentaron posibilidades y se formó un método para poder editar la textura en todos sus aspectos independientemente del modelo y sin riesgo a perder la conexión entre los dos.
Para comenzar con este apartado se hizo una análisis la información de color de los vertex colors que poseía la mesh, para ver donde podía ser utilizados esta información, y si podían ser corregidas en los casos necesarios. Se decidió mantener la textura del exterior del entorno por las
siguientes razones:
1) No es relevante la distorsión de colores que poseía, para el entendimiento del sitio de excavación.
2) El trabajo para reproducir el lugar de la excavación sería arduo y los resultados que se obtendrían, no serian reales. Por lo tanto sería un trabajo para obtener una distorsión de otro tipo.
El interior se decidió utilizar la información obtenida a partir de la fotogrametría, dado a su gran precisión y calidad en la textura que se obtuvo en el relevamiento. Con esto aparece el problema típico del ambiente del renderizado el mapping, que en este caso,que la textura no es una imagen seamless1 es aun más complicado, el hacer coincidir los pixeles con la geometría, para obtener una imagen fidedigna.
En otras palabras el problema recae en que no se sabe donde deben proyectarse los pixeles de la imagen en la malla de la geometría del objeto. En el gráfico 3.3.28a,
8 7
1 Las imagenes o texturas seamless o sin limites se le llaman a las imagenes que se pueden repetir sin generar patrones que evidencian que una repetición.
se puede observar una malla graficada en la parte inferior del mismo subdividido con una retícula negra en 3 dimensiones y su textura en 2 dimensiones en el superior. En el caso del gráfico ya esta resuelto el mapping y para entenderlo conceptualmente, el mapping son las lineas rojas que unen los vértices de la textura y la malla geométrica. Los softwares resuelven el problema con el plano gris que se ve en el gráfico 3.3.28b, que funciona de intermediario entre los dos y garantiza que no sufran cambios geométricos ni la malla ni la textura.
En este plano gris, de UVs, puede ser proyectada la textura al igual que en la imagen normal y las coordenadas de la geometría adaptarse a esta o puede suceder lo contrario. Generalmente en el ambiente sucede la primera manera que se observa en el gráfico 3.3.29.
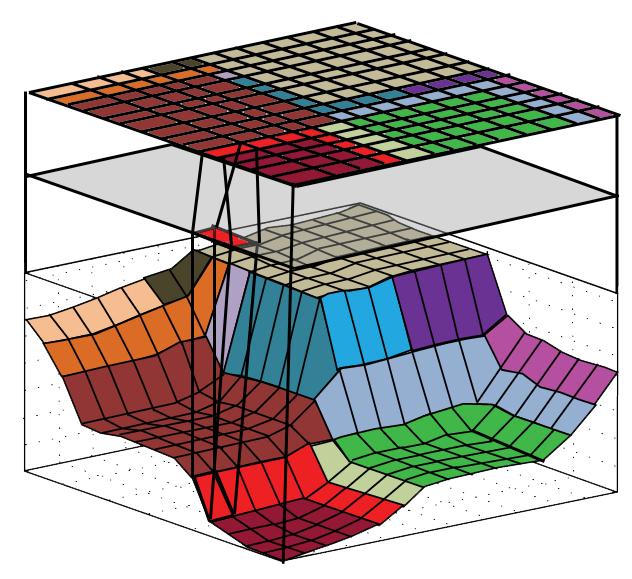
En el caso de la tumba tenemos tanto la geometría definida como la textura y necesitamos que encajen perfectamente. Por lo tanto lo que se debe generar es este plano de UVs, que esto no se diferencia de
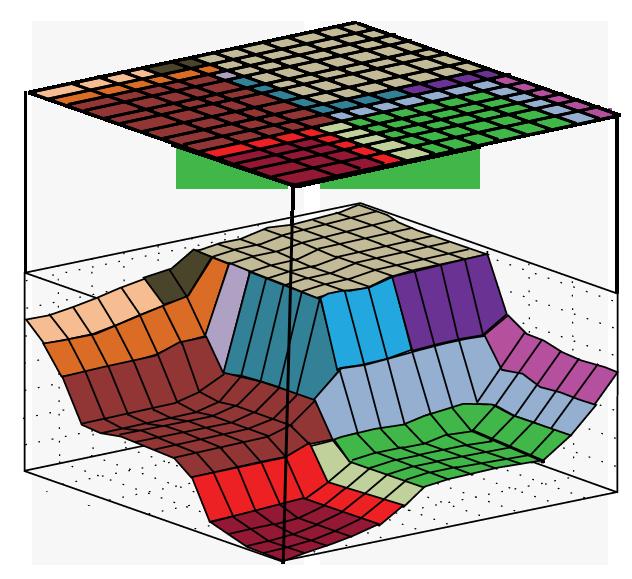 Gráfico nº3.3.28a - Problema del Mapping.
Gráfico nº3.3.28a - Problema del Mapping.
8 8
Gráfico nº3.3.28b - Problema del Mapping.
una texturización normal, sino que tiene la particularidad que debe poder ser fácilmente editable tanto en la mesh, al interno del programa, como la textura al externo del programa. Estos dos requerimientos son imprescindibles para que el modelo funcione como herramienta de trabajo y de estudio y no solo de visualización. La solución a este problema es lograr una vía media entre proyectar la imagen y que los Uv se amolden y viceversa.
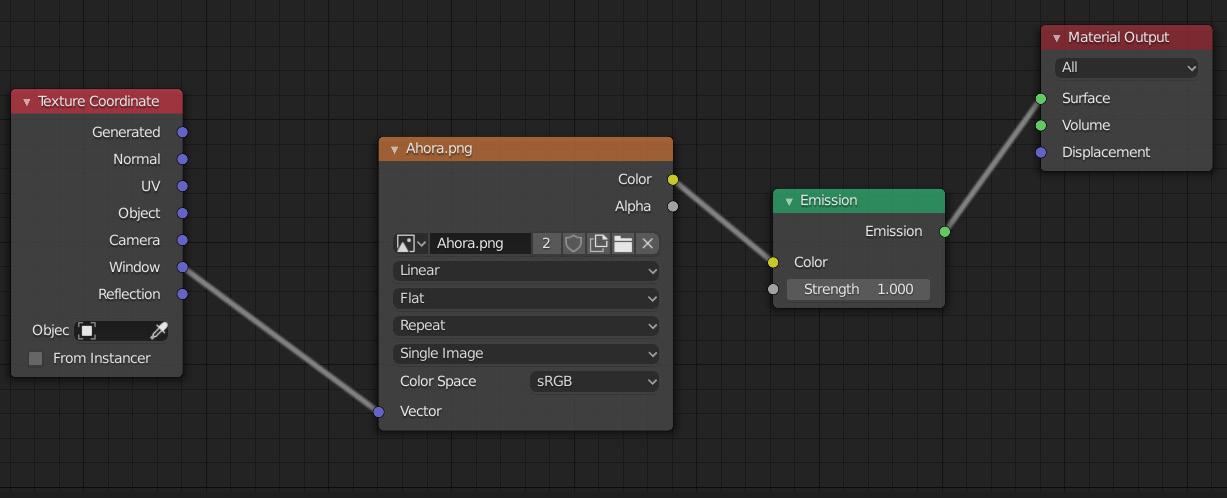
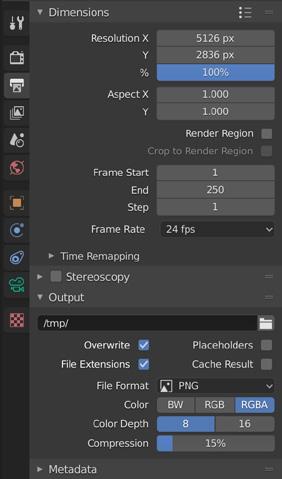
Para lograr esto1 se posicionó una cámara y se configuró para que el recuadro de esta misma encierre dentro la superficie del objeto que se desea (Gráfico 3.3.30). Mientras mas preciso sea este recuadro mas sencillo será el trabajo posterior, para esto se puede dimensionar la dimensión de la imagen en el panel adjunto en el gráfico 3.3.30. El trabajo del posicionamiento de la cámara es necesario, porque con la configuración de Shaders sobre el material del gráfico 3.3.31 la ventana de la cámara funciona
1 Vale aclarar que facilita el trabajo de todo el proceso dividir rigurosamente la mesh para cada material que se desea hacer un bake. Sería arduo y lavorioso hacer el trabajo sin esta división. En el caso de este trabajo se recomienda hacerlo dado que luego se poseen en capas cada elemento.
proyección de textura con coordenadas segun posicíon de la ventana.

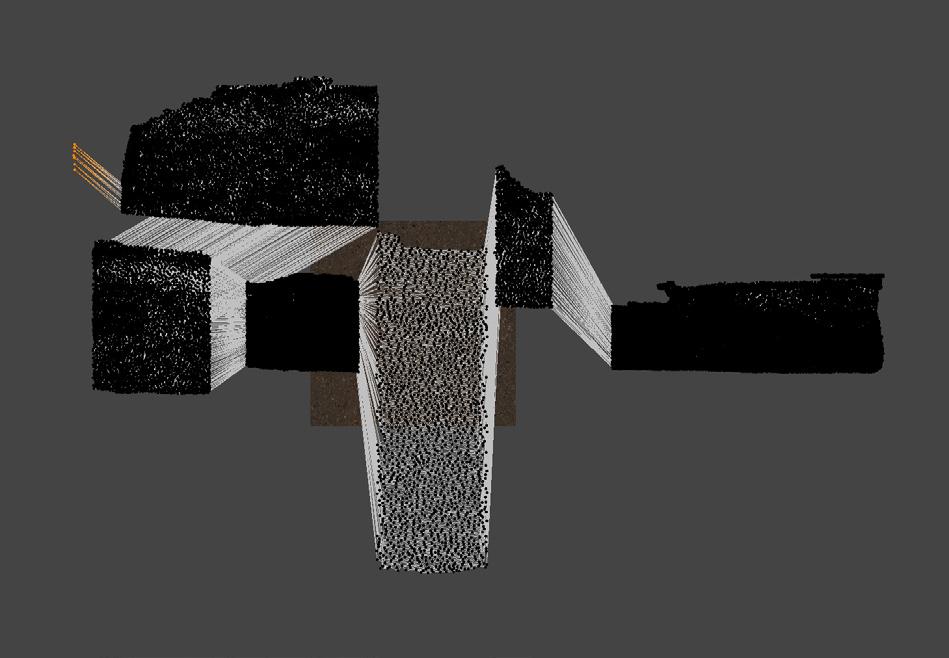 Gráfico nº3.3.29 - UV editor Blender. Recuadro de una textura y coordenadas Uvs de la mesh.
Gráfico nº3.3.30 - Posicionamiento de camara y dimensionado en Pixeles.
Gráfico nº3.3.29 - UV editor Blender. Recuadro de una textura y coordenadas Uvs de la mesh.
Gráfico nº3.3.30 - Posicionamiento de camara y dimensionado en Pixeles.
8 9
Gráfico nº3.3.31 - Configuración de shaders para
como un proyector sobre el material. Se utiliza un Shader de Emission así la pared del material emite esa imagen exactamente sin sombras ni zonas más iluminadas.


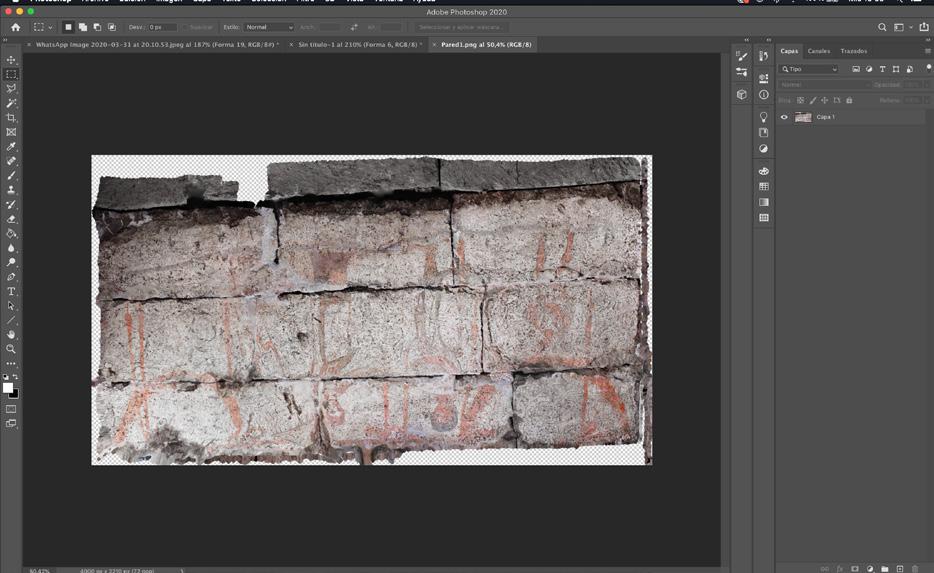
Luego se hace un bake de esta textura para fijarla y que no se mueva con girar o desplazar la cámara, para eso se hace un contenedor de la misma dimensión de la cámara indicado en el panel del gráfico 3.3.30. Todo el proceso del bake se explica en el Nivel I, de la pagina 53 a la 57. Una vez hecho esto poseemos nuestra textura, solo falta configurar nuestro material1 Gráfico 3.3.32. En el gráfico 3.3.33 se observa que ahora esta nueva imagen puede ser editada sobre cualquier software de edicción de imágenes y se actualizará sobre el del modelado, se debe mantener la dimensión y posición de toda la imagen porque sino se distorsionaría la visualización en el modelo.
1 Se utilizó la configuración predeterminada del shadero de Blender dado que es la única en la que despues se logró exportar la textura con el modelo. No se le aplican modificadores shaders de modificadores de luz, contraste, saturación, etc dado que estas modificaciones no vienen exportadas con el material, por lo tanto se decidio hacer todas esas modificiaciones en un herramienta externa de edición de imágenes.
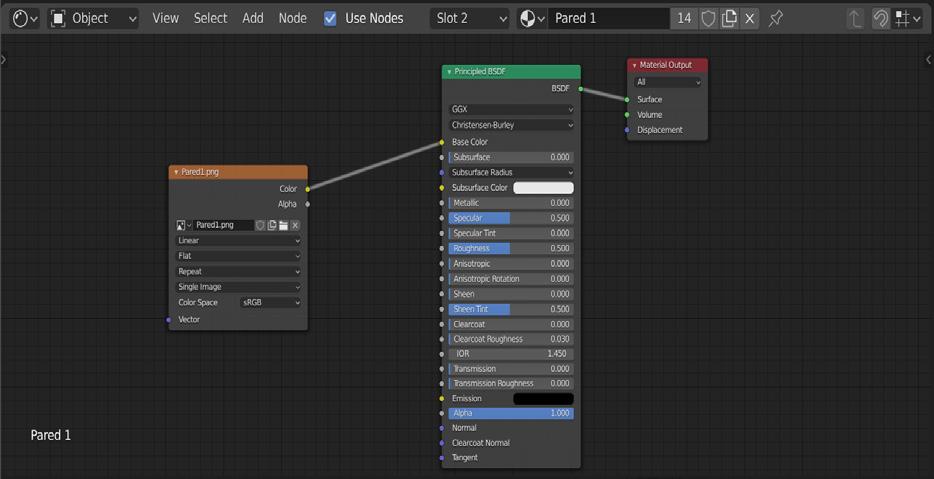 Gráfico nº3.3.32 - Configuración del material de la Pared1 - Pared de las figuras.
Gráfico nº3.3.33- Configuración del material de la Pared1 - Pared de las figuras.
Gráfico nº3.3.32 - Configuración del material de la Pared1 - Pared de las figuras.
Gráfico nº3.3.33- Configuración del material de la Pared1 - Pared de las figuras.
9 0
Gráfico nº3.3.34 - Paredes sin textura conocida.
La metodología desarrollada previamente fue utilizada con todos los elementos que se poseía la información de la textura. Pero hubo dos casos (Gráfico 3.3.34) donde se tuvo que simular el lateral de los bloques existentes por falta de información de en el relevamiento fotogramétrico.
El proceso para esto último es muy similar al anterior, primero se separa la parte de la mesh donde se desea inserir la nueva textura. Luego se posiciona la cámara en la posición, este procedimiento no es necesario la precisión del otro en el dimensionado de la cámara y hasta se recomienda dejar un margen de los otros materiales (Gráfico 3.3.35). Luego se Renderiza esta cámara no es importante la calidad de este render, en nuestro caso se utilizo el Motor de Render de Rasterizado, Eevee en Blender.
Con este se pasa a hacer la mismos pasos que se hizo en el otro material explicado perocon la imagen del renderizado. Una vez completada todo el proceso y nos encontramos en el mismo paso del gráfico
3.3.33, tendremos una imagen como esta. Con esta imagen en un software de edición de imágenes podemos utilizarla como guía para saber donde recrear el material similar a la pared adyacente para homogeneizar las caras. Dado que la imagen creada después del bake nos mostrará el mappeado UV que generó el programa. Este proceso es más complejo, donde se deben editar la imágenes y las coordenadas de los UVs en contemporaneo para alcanzar un buen resultado. Pero como no es una textura de gran interés, dado que no se hizo relevamiento, que se camufle en la escena es suficiente.

9 1
Gráfico nº3.3.35 - Cámara de renderizado.
Como ultima texturización se dejaron los bloques reconstruidos por la hipótesis. Donde se discutió si reproducir el material igual a los que se ven o no. Y se decidió siguiendo las corriente del restauro arquitectónico usar el mismo material pero que se diferencie para no engañar al ojo que observa la reconstrucción. Para esto se descargó una imagen de internet de textura que se asemeje a los bloques de Travertino y se configuraron los Shaders (gráfico 3.3.36). Pero lo más importante es que quedaron configurados, al igual que todos los otros elementos en la escena, para poder cambiar las imágenes y cambiar los materiales a voluntad.

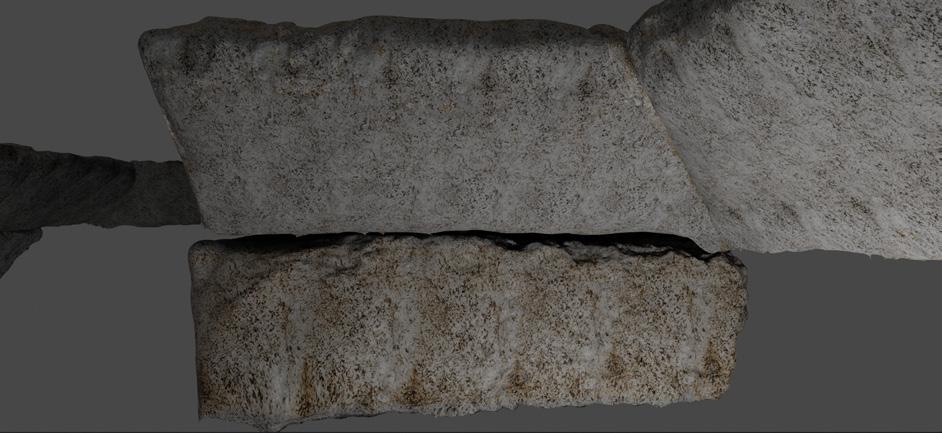
Por la diferencia entre la coloración entre el relevamiento del escaneo laser y la fotogrametría los bloques reconstruidos tuvieron que ser texturizados con 2 dos texturas para asemejarse tanto en el interior como en el exterior al ambiente. Esto se puede observar en el gráfico 3.3.37 a y b, donde se observan la diferencia la cara interna y externa.
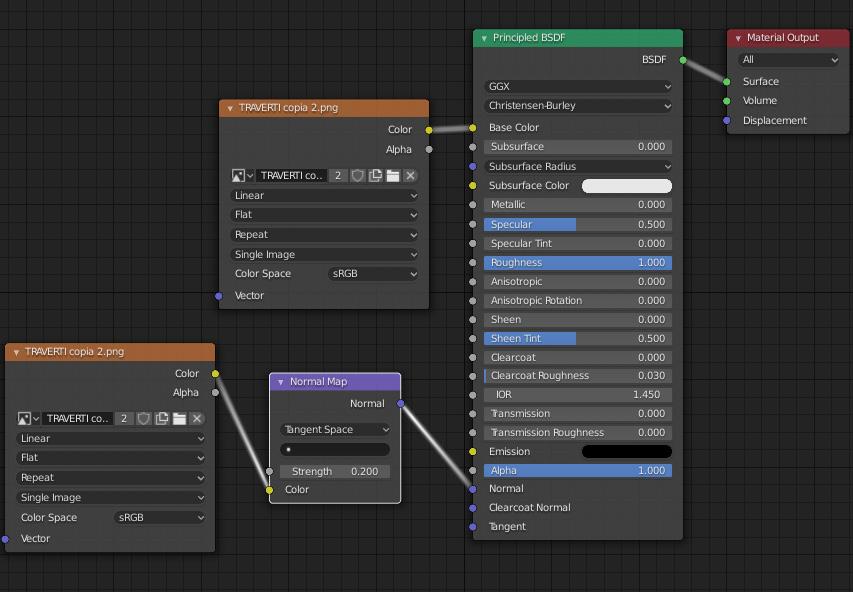 Gráfico nº3.3.36 - Configuración de Shader para bloques reconstruidos de Travertino. Normal Map para darle mayor realidad. El valor del Roughness configuró a 1 por el tipo de material, al igual de la metalidad que se dejó en valor 0.
Gráfico nº3.3.36 - Configuración de Shader para bloques reconstruidos de Travertino. Normal Map para darle mayor realidad. El valor del Roughness configuró a 1 por el tipo de material, al igual de la metalidad que se dejó en valor 0.
9 2
Gráfico nº3.3.37- Configuración de materiales.
Como último paso que sirve sobre todo para la visualización, pero también para comprobar si el modelo ha estado bien efectuado y si hay errores en la textura, es necesario configurar la iluminación de la escena para el renderizado.
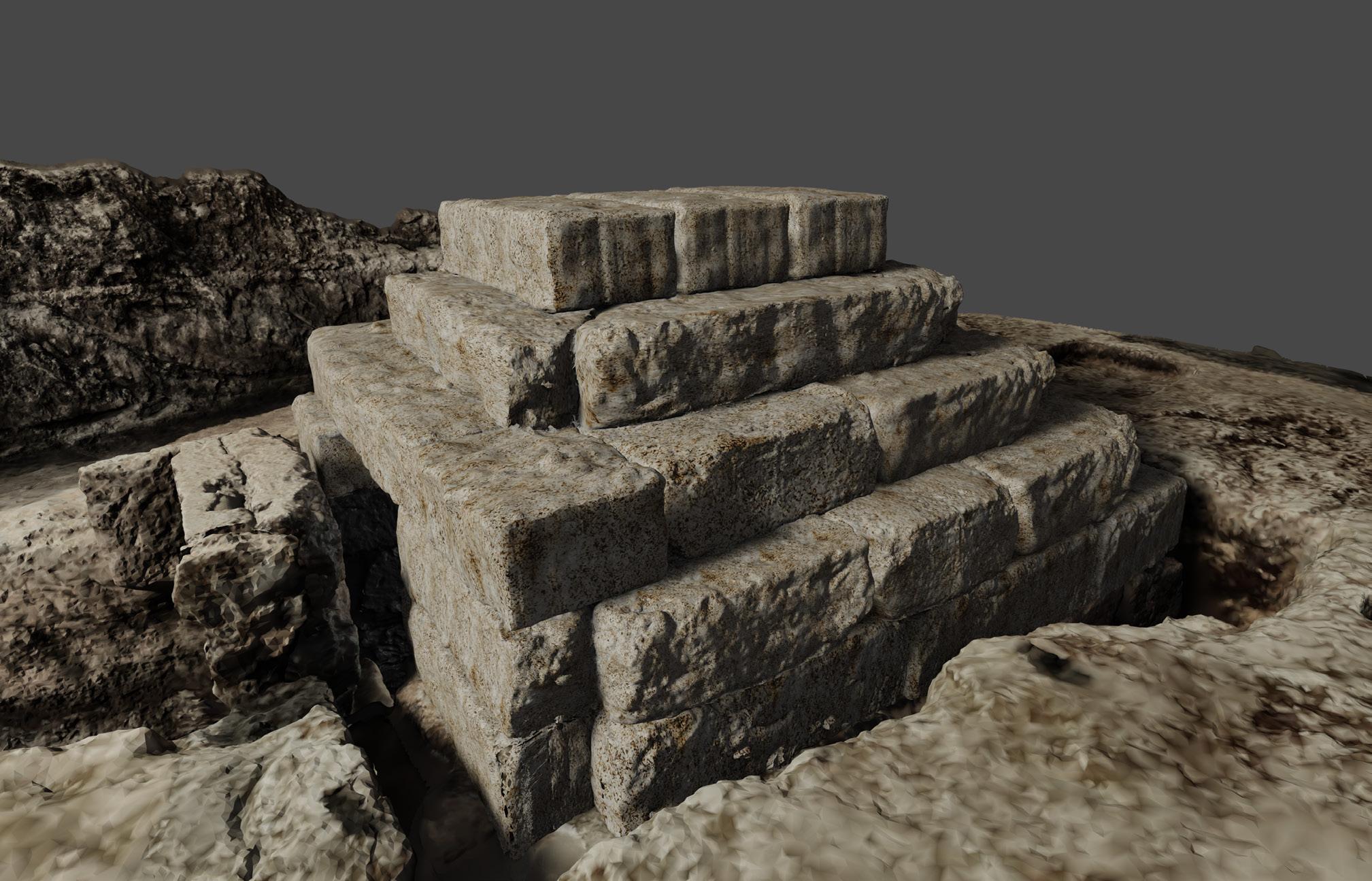
Este último paso se puede definir
como la corrección de los detalles, comprobar la posición de los bloques para ver si generan sombra en la uniones, si se observan errores en los patrones de las texturas, la coloración de los materiales; si el resultado no es el deseado en cualquier opción se vuelve a la etapa de edición.
9 3
Gráfico nº3.3.38 - Exterior de la tumba 9890 reconstruida con el motor de Blender 2.8 de Rasteriza Eevee.
4.0
Resultados-Discusión
L egajo Gráfico
 Gráfico nº4.0.1. Vista del alto obtenida del relevamiento con escaneo laser.
Gráfico nº4.0.1. Vista del alto obtenida del relevamiento con escaneo laser.

9 7
Gráfico nº4.0.2. Orthophoto pared Oeste del relevamiento con fotogrametría.
Gráfico nº4.0.3. Orthophoto pared Este del relevamiento con Fotogrametría.

9 8

9 9
Gráfico nº4.0.4. Orthophoto pared Sur del relevamiento con Fotogrametría.

1 0 0
Gráfico nº4.0.5. Orthophoto pared Norte del relevamiento con Fotogrametría.
Gráfico nº4.0.6. Comparación orthophotos de modelo Fotogramétrico y fotos alineadas para eliminar perspectiva mediante Perspective Rectfier.
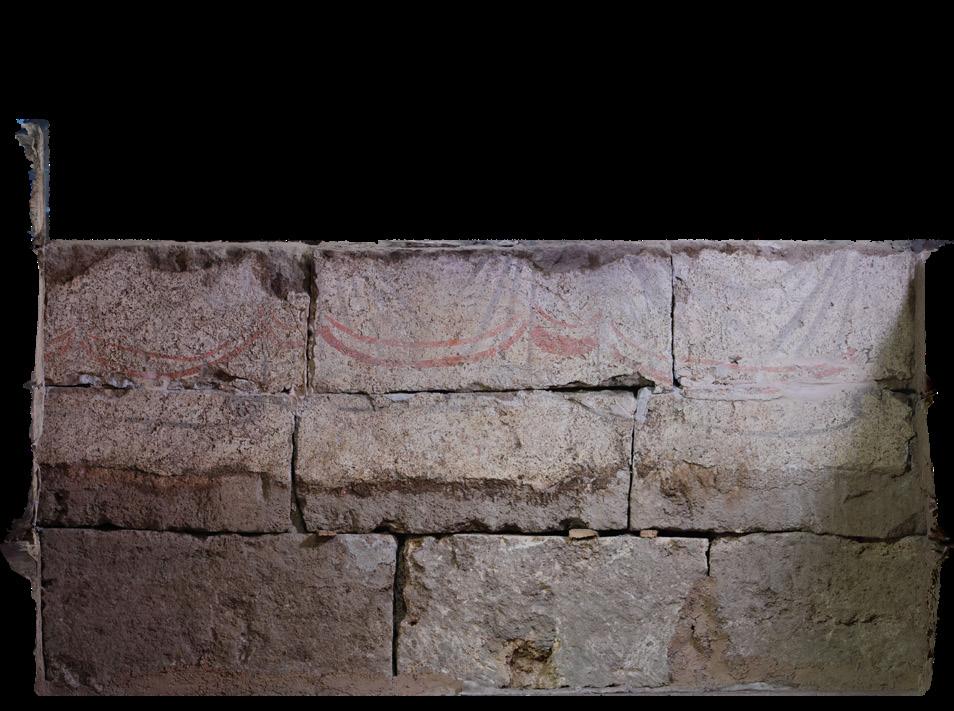


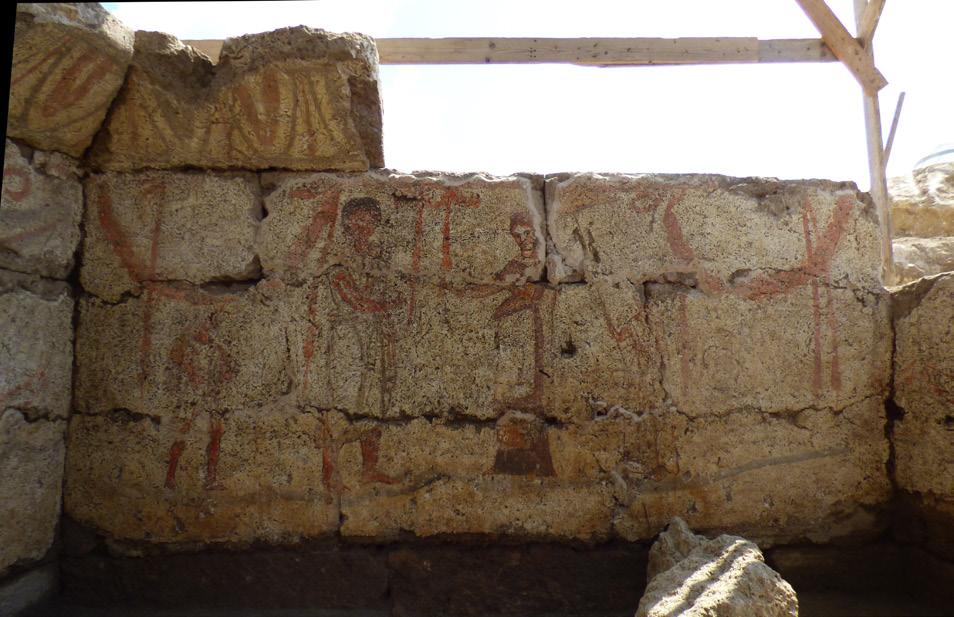


1 0 1
R econstrucción
 Gráfico nº4.0.7 - Vista del alto del modelo 3D finalizado, momento de la excavación.
Gráfico nº4.0.7 - Vista del alto del modelo 3D finalizado, momento de la excavación.

1 0 3
Gráfico nº4.0.8 - Vista del alto del modelo 3D finalizado, reconstruida.
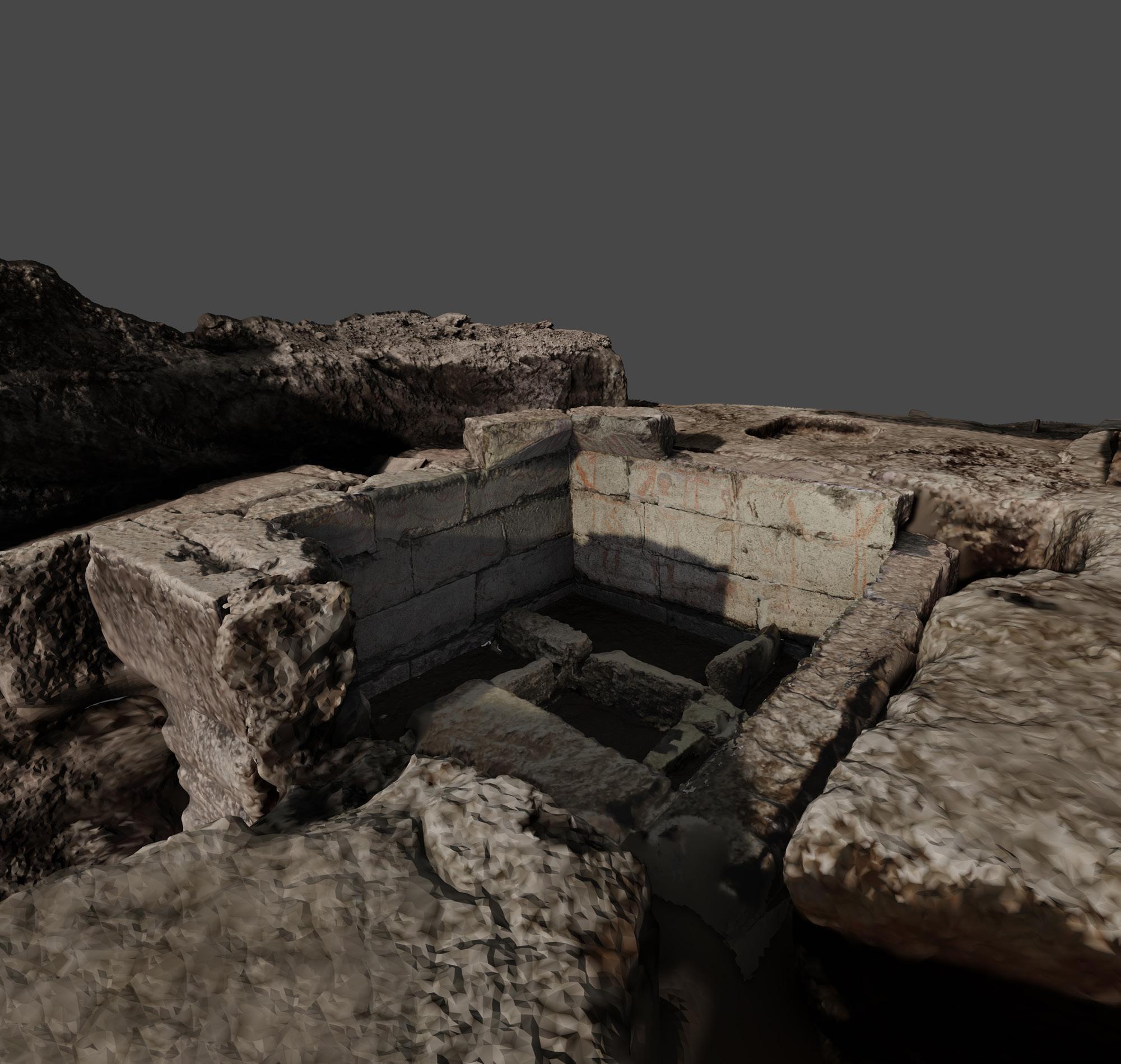
1 0 4
Gráfico nº4.0.09 - Render exterior de la tumba 9890 en momento de la excavación.
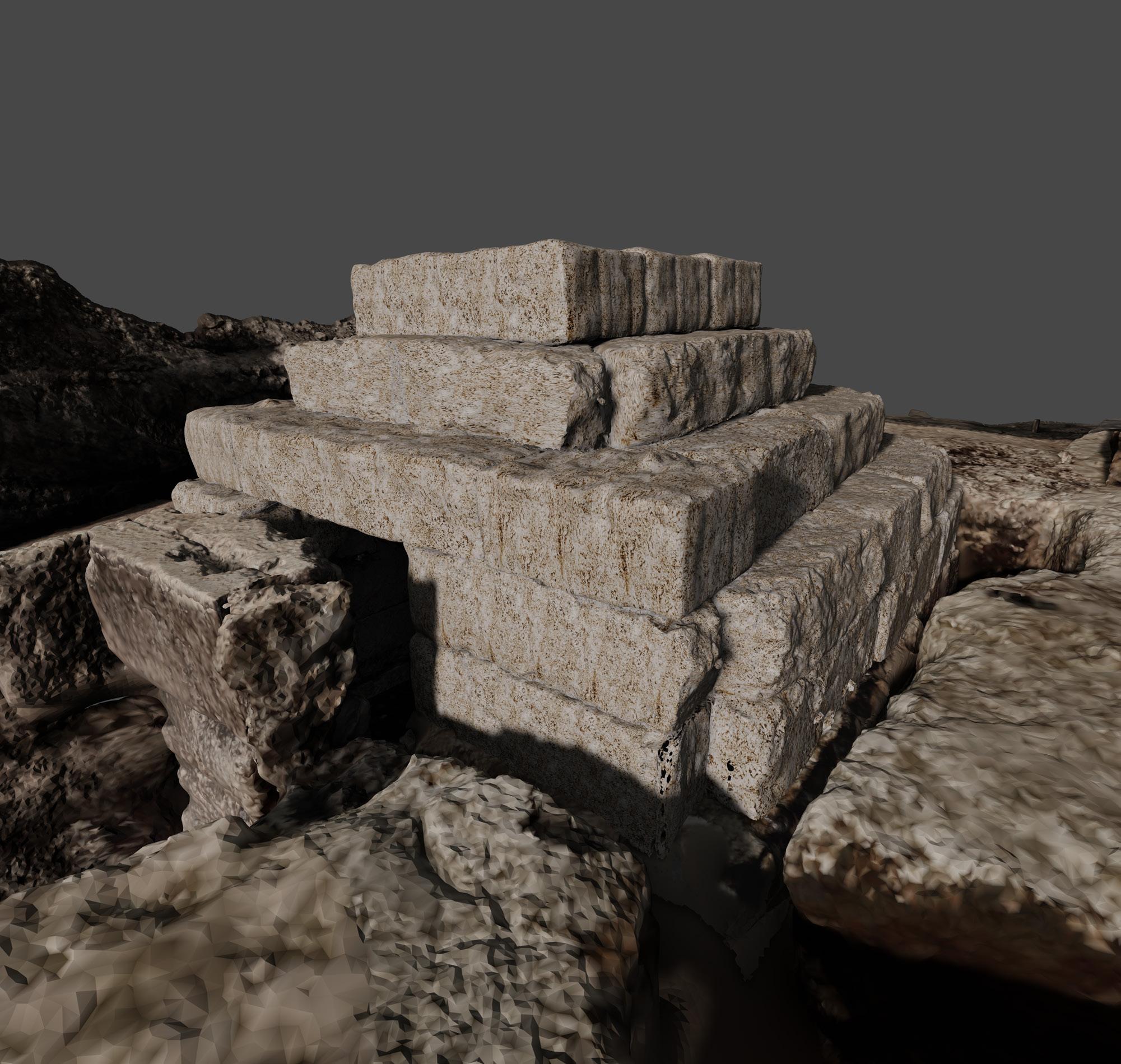
1 0 5
Gráfico nº4.0.11 - Render exterior de la tumba 9890 reconstruido.

1 0 6
Gráfico nº4.0.11 - Render de pared Este reconstruida con motor de rasterizado.
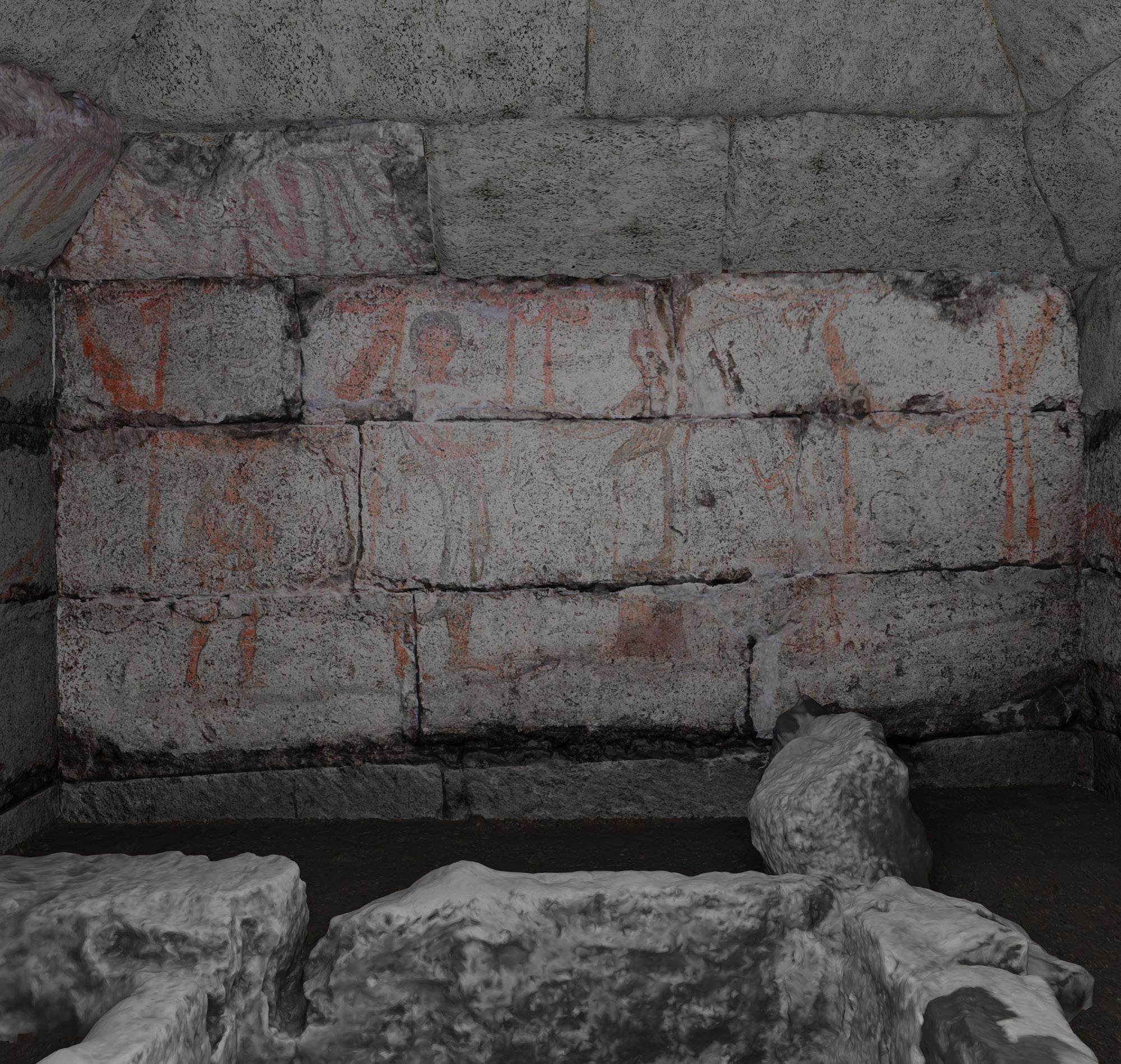
1 0 7
Gráfico nº4.0.12 - Render de pared Sur reconstruida con motor de rasterizado.

1 0 8
Gráfico nº4.0.13 - Render de pared Oeste reconstruida con motor de rasterizado.

1 0 9
Gráfico nº4.0.14 - Render Interior.
5.0
Conclusiones
C onclusiones y perspectivas futuras
Durante el desarrollo de este trabajo se generó un espacio virtual de la tumba 9890 ubicada en Pontecagnano que valida la utilización de este tipo de softwares como herramientas de trabajo, de modelación y de reconstrucción del patrimonio histórico
La generación de los modelos finales en estos espacios virtuales permite, a posteriori de ser creados, realizar trabajos de edición rápidos, eficaces y precisos, factibles de ser aplicados a diversos campos de estudio.
Los resultados obtenidos, producto de la aplicación de métodos convencionales (fotografía, escaneo laser y fotogrametría) y no convencionales (softwares de animación y renderizado), fomentan la utilización experimental y su potencial para sensibilizar y acercar la sociedad a valorizar el patrimonio arquitectónico.
La potencialidad de los resultados obtenidos confirman las hipótesis de generar un espacio de trabajo útil y potente para el ambiente. Sobretodo hay que
destacar la facilidad de generar cambios sobre el modelo y poder experimentarlos de manera inmersiva.
Los resultados obtenidos ameritan continuar experimentando las técnicas desarrolladas en el trabajo de tesis y buscar conectarlas con realidad aumentada y realidad virtual. En busca de una comunicación que sensibilice y acerque, aún más, a toda la sociedad sobre el patrimonio cultural.
C onclusioni e perspettive futura
A valle di questo lavoro di tesi è stato generato uno spazio virtuale per la Tomba 9890 situata nell’Area Archeologica di Pontecagnano, validando l’implementazione di nuovi software come strumenti per la ricerca, la modellizzazione e la ricostruzione del patrimonio storico.
La restituzione di modelli tridimensionali consente, continuando a operare virtualmente, di eseguire operazioni di editing rapide, efficaci e abbastanza rigorose, facilmente applicabili anche ad altri casi di studio.
I risultati grafici, prodotto dell’integrazione di metodi più convenzionali (fotografia, scansione laser e fotogrammetria) e meno convenzionali (software di animazione e rendering), promuovono l’uso sperimentale per una fruizione del patrimonio architettonico storico.
Quanto ottenuto conferma, infatti, le ipotesi di generazione di ambienti virtuali e modelli tridimensionali per una modalità immersiva. Ovviamente, si segnala la necessità di proseguire nella sperimenta-
zione di queste nuove tecniche, per meglio svilupparle e con l’obiettivo di definire un collegamento con la realtà aumentata e/o virtuale. Ciò con lo scopo di una rappresentazione infografica ancora più comunicativa e che sensibilizzi ancora di più l’intera società verso le tematiche di conoscenza e valorizzazione de nostro patrimonio culturale.
1 1 3
6.0
Citas-Agradecimientos
Barba S., Tecniche digitali per il rilievo di contatto, CUES, 2008.
Tomay L.,Annali Della Fondazione Per Il Museo « Claudio Faina » Volume Xxv
Scavi D’Etruria, 2018.
Barazzetti L., Remondino F., Scaioni M., Automated and accurate orientation of complex image sequences, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2011.
Baglivo B. e Tomay L., Dialoghi Sull’Archeologia della Magna Grecia e del Mediterraneo, 2017.
Tomay, L. Publicacion: “Una Tomba a camera con decorazione dipinta da Pontecagnano, 2020.
Belardi P., Bianconi F., Romano C., Conoscere per progettarela conservazione dei beni culturali. Il rilievo con tecniche di laser scanning della statua lignea del San Rocco, Sculture da vestire [...], Electa, 2005.
Kraus K., Fotogrammetria, Vol. 1, Levrotto & Bella, 1998.
Fassi F., Fregonese L., Ackermann - S., De Troia V, Comparison between laser
scanning and automated 3D modelling techniques to reconstructcomplex and extensive cultural heritage areas, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XL-5/W1, 2013.
Fiorillo F., Limongiello M., Jimenez
Rodriguez B., Barba S., Documentazione dei paramenti della Villa di Giulia Felice a Pompei. Spazi angusti e analisi geometrico-grafica dei rilievi, Prospettive architettoniche conservazione digitale, divulgazione e studio, Vol. II, II, 2016.
Fusiello A., Visione Computazionale: tecniche di ricostruzione tridimensionale, Franco Angeli, 2013.
Giordano M., Barba S., Le geometrie del decoro architettonico. Sistemi di presa scanning 3D e prototipazione, CUES, 2012.
Limongiello M., Barba S., Germinario C., Izzo F., Musmeci D., Santoriello A., Photogrammetry for archaeological 3d surveying: the case-study of ponte rotto along the ancient appia (Benevento, Italy), Yococu 2017.
B ibliografía
S itografía
https://www.agisoft.com.
https://www.ronenbekerman.com/ www.udemy.com
www.substance3d.com/products/ substance-painter/
https://blenderartists.org
http://www.3dtarget.it/
1 1 7
A gradecimientos institucionales
Para llevar a cabo este trabajo de tesis conté con el respaldo y apoyo de diversas instituciones públicas y la colaboración del personal que en ellas se desempeña. A todos ellos les agradezco su ayuda:
A los Prof.ssa. Dra.ssa Bárbara Messina y al Dr. Salvatore Barba por la colaboración académica.
A los Ingenieros Marco Limongello y Carla Ferreira por el apoyo técnico y guiarme en este proceso.
Al Profesor Dr. Alfonso Santoriello y al Dra.ssa Luigina Tomay por la colaboración académica y trabajo en el Museo Archeológico Nazionale di Pontecagnano, Italia
A la Universidad Nacional de Córdoba, Facultad de Arquitectura, Córdoba, Argentina, por el apoyo institucional y por brindar el marco formativo de mi carrera de grado.
A la Università degli Studi di Salerno que en el marco de la doble titulación me dio la posibilidad de continuar y ampliar mi formación académica.
Al museo arqueológico por los materiales y permisos de muestreo necesarios para la realización del trabajo de esta tesis. Al personal del Laboratorio Modelli por brindarme su colaboración para realizar esta tesis y compartir su espacio de trabajo.
A gradecimientos personales
A mi Mama: mis ojos y orejas, porque me enseño, enseña y enseñara todo; pero sobretodo me mostró la enseñanza de escuchar y respetar, porque se aprende de todos.
A mi Papá: mis hombros y piernas, porque me enseño a caminar por la vida y siempre me apoyo cuando fue necesario, y cuando no también.
A la Cuca: mi mente, porque de grande las charlas con la vieja siempre fueron estimulantes y de chico sus cuentos me hacían pensar y soñar.
A mi hermano: mis manos porque siempre, a pesar de nuestras cientos de idas y venidas, me estiro una suya.
A Erika: mi sonrisa y mis pies, porque a pesar que ya tiene mi corazón, me sacó una sonrisa en días turbulentos y logra bajarme a tierra.
A mi abuela Luisa: el orgullo, porque me enorgullezco de que me transmitió en la sangre esa fuerza de trabajar característica de ella, para arrasar todo a pesar de todo.
A mi Abuelo Elvio: mi memoria, porque más allá de mi falta de recuerdos juntos me malcrío y amo como él solo podía, tanto que continuo a escuchar la misma historia mil veces y sigo poniendo la misma sonrisa que la primera vez.
Al Facu y Fer: los brazos, porque son los incondicionales que aunque yo me distancio están siempre ahí, invitándome a comer esperandome con un abrazo.
A mis amigos los de Córdoba que llenaron de mil y un historias mi paso por esa hermosa ciudad, en especial a Carlos, el Salteño, Penky, la Negra, Wyss y Lemon Pie que falto sueño pero no risas.
A Juli y Guido sus puertas siempre estaban abiertas en Buenos Aires y que su oido siemre esta cuando se necesita.
A Fede, Silvina, Daniel, Santi y Fran que me “adoptaron” temporaneamente. Siempre su casa tuvo un mate y un plato demás.
A Sofi, que sin ella esta experiencia no hubiese sido igual, y además porque seguiría solo desmallado en la universidad.
1 1 9
Este libro fue escrito como Tesis de Grado bajo el Acuerdo Doble Titulación entre la Universidad Nacional de Córdoba, Facultad de Arquitectura, Urbanismo y Diseño; junto con la Università degli Studi di Salerno, Facoltá di Ingegneria. Para el conseguimiento de los titulos de Arquitectura y Urbanismo - Ingegneria Edile ed Architettura.