ACTIVE‘OUTBENDINGOFSTOCK’WORKSHOPONEAPOSTOLOSDESPOTIDISOGULCANSULUCAYCEMREDEMIRCIBENSUTALAYMAYAMASHIACHKAYMASHIACHZHENJIASWATISINGH


INDEX
OVERVIEW MATERIAL PHYSICALCOMPONENTAGGREGATIONITERATIONSORGANIZATIONCONNECTIONSBASEVARIATIONSMOVEMENTBENDINGINITIALCOMPONENTSTUDIESEVOLUTIONEXPERIMENTATIONSSTUDIESSTUDIESPARTARRANGEMENTSMODULECOMPONENTCLOUDFORMATIONPHYSICALAGGREGATIONPARTS+DIGITALAGGREGATION 3422161264
Experimentation with different wire thicknesses formed into various sizes of components was made to understand better the ideal formation of the cloud.
MATERIALGOALOVERVIEWSTUDIES + EXPLORATION
how different wire thicknesses effect the bending properties of components through creating a dynamic system of rigid and active bodies.
Exploring4
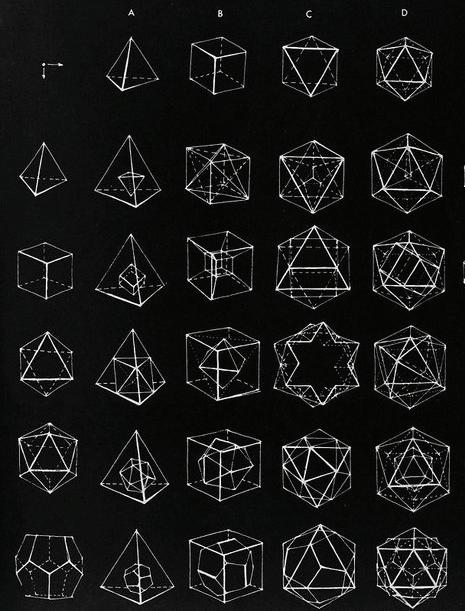
To examine the behaviour of this system clearly, a rigid body embodying a simplified primitive geometry was selected as the main unit of this system accompanied by an active and rather complex unit.
Geometry was studied in detail to facilitate the dynamic system which resulted in the decision of having the rigid body in a volumetric organisation and the active one toggling between 2D and 3D.



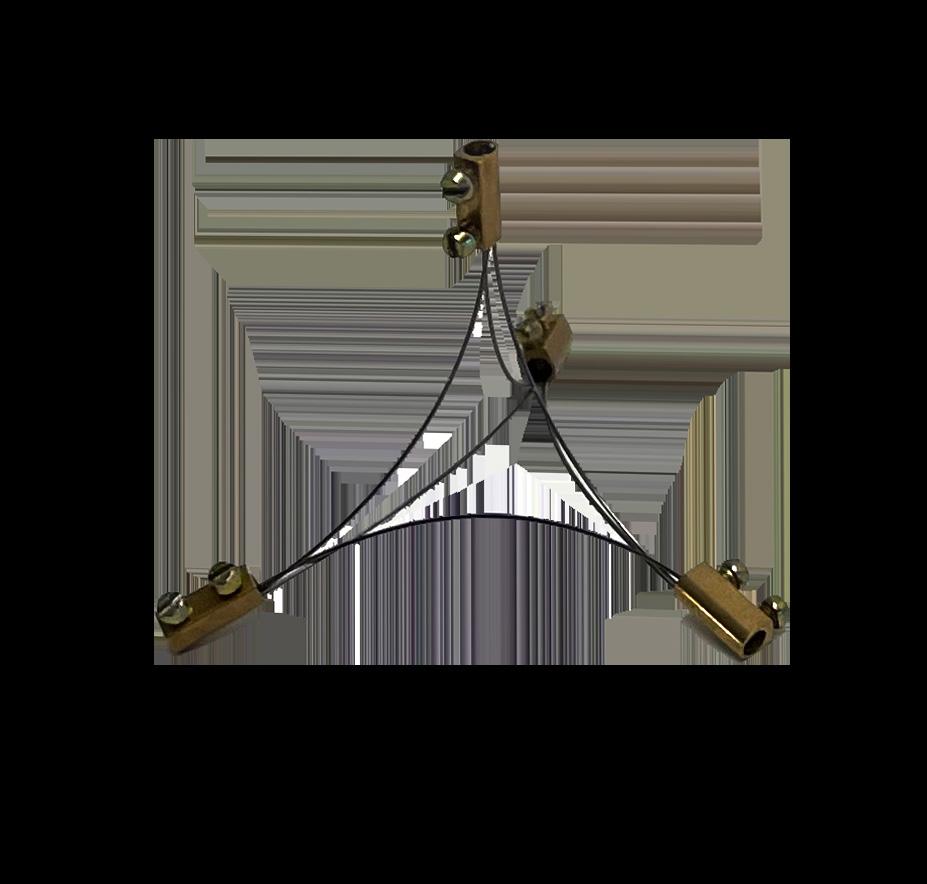
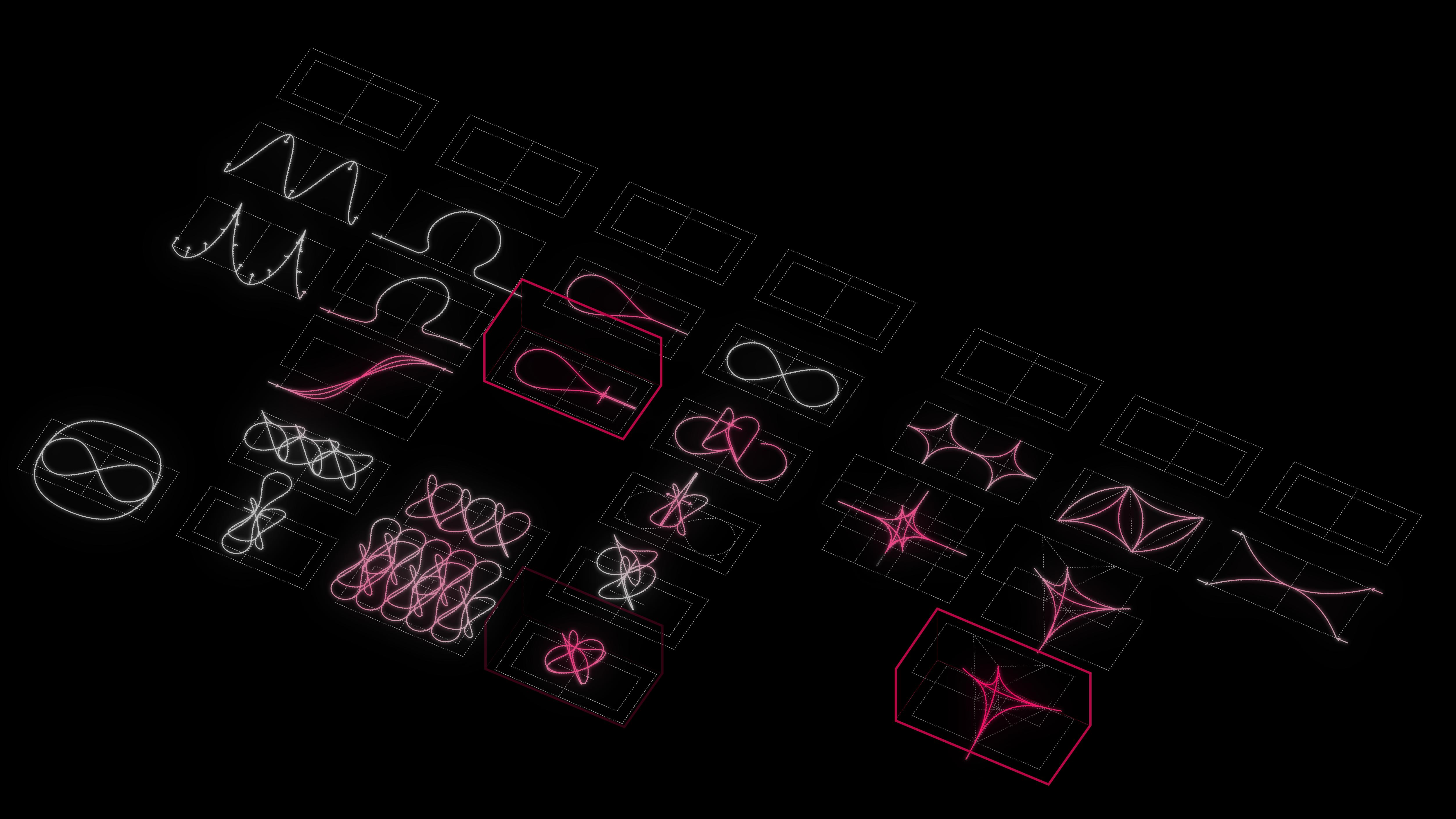
ACTIVEPASSIVESTEPaattachescreateThebyline,expandingmovementstructure.itselfThistypologicaldecidedlynaturallyprototype.transformcompression,UtitlizingdimensionalThisEXPLORATIONEVOLUTIONCOMPONENT6OFCOMPONENTprototypesbeginsasatwo-triangle.jointsaspointsoftheobjectisabletointoathree-dimensionalBecauseofthestructure’srigidformation,wehaveassignedtheprototype,joint.prototypeassertsasthemobileassettoitsWhileassigningtheoftheobjecttoworkbyandcontractingitsoutercontrolledanunspecifieduser.explorationofformationwastoasinglewirecomponentthatitselfontoarigidstructureassybmioticparasite1(RIGID)PROTOTYPE(BENDING)PROTOTYPE
have been made with the way in shift in 2D and 3D effected the rigid bodies. It has been observed how different connections and geometries in both components to create the ideal
STEP Explorations2
When the system variations of active and possive boddies are combined a dynamic organization has been emerged.
EXPLORATION OF COMPONENT
OUTCOME:movement.
7
Piano wires are our material base that allows for a great variety of exploration through bending, rigidity and Ourdeformation.experimentation of the pyramid has been defined by the different thicknesses we have explored in application to our experimentationIncludingcomponent.the of the slider was key to achieving an understanding of how flexible this component can be. Applying a tension feature to this element, gave us an opportunity to combine wire thicknesses and lengths to locate an appropriate set of active and passive components.
0.4 mm thickness 0.6 mm thickness 0.8 cm thickness each property, 0.4 and thicknesses0.6wereselected. each property, 0.4 and thicknesses0.6wereselected. Bendin Combinedg rigidit y Deformatio n Bendin Combinedg rigidit y Deformatio n Bendin Combinedg rigidit y Deformatio n STEP 2
INITIAL8
EXPERIMENTATIONS
the
TheOUTCOMEthinner
the
a




maintaining rigidity within the
Meanwhile the thicker the wire, the less forces affect system, object.

the wire, the more compression can affect system, allowing for mobile object.







0.8 cm large rigid model 0.6 cm smaller Animationsbendings.8vs.4
9
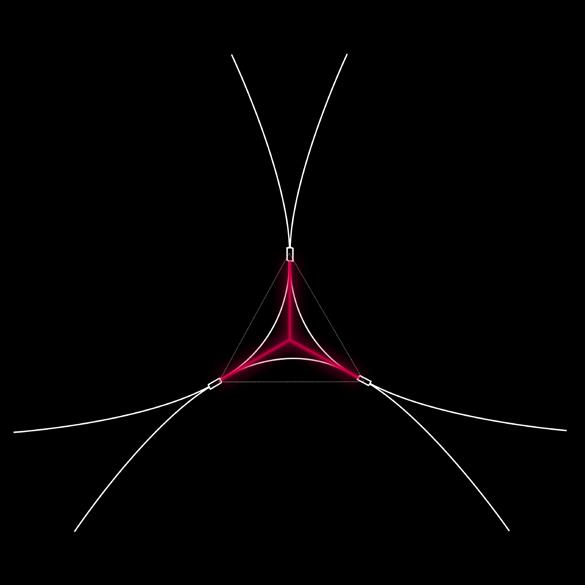
MOVEMENT10 + BENDING STUDIES While0.4having 2B 2C Diagram of the bending abilities of thicknesseach.6 Diagram of the bending abilities of thicknesseach.8 primitivetriangle bendingactive connectionsenactingtension interlockingsystemsaggregatehooksfractaltree barbedhook skeleton organizedsystem d3x 3d 4d3x 2x 2x x x DEFORMATION & CONFIGURATION OF THE RIGID / PASSIVE PROTOTYPE


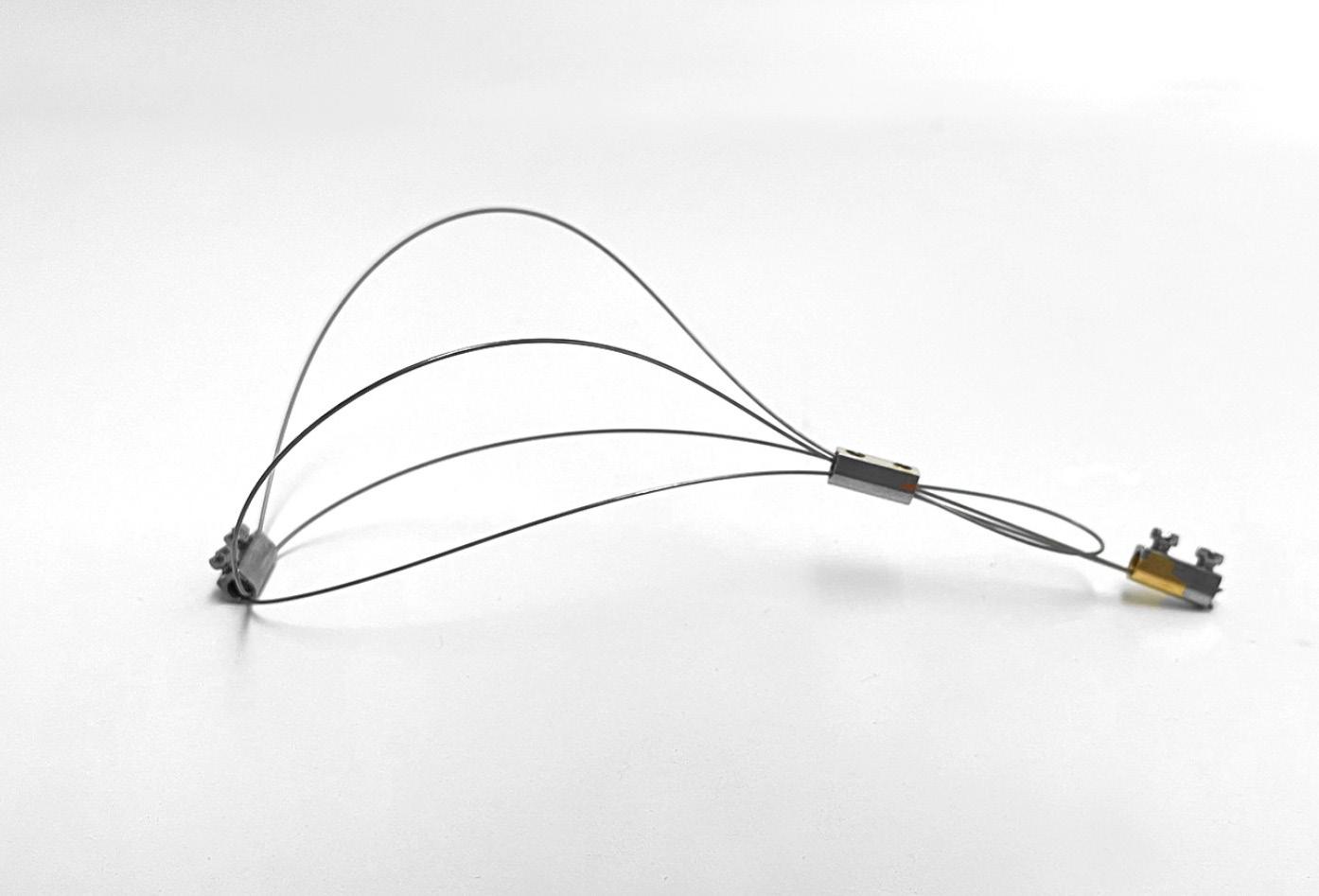
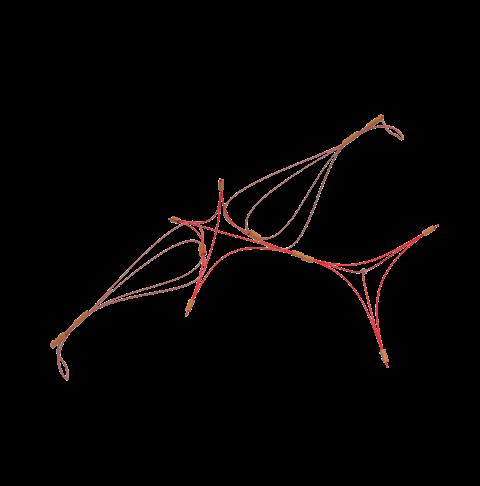
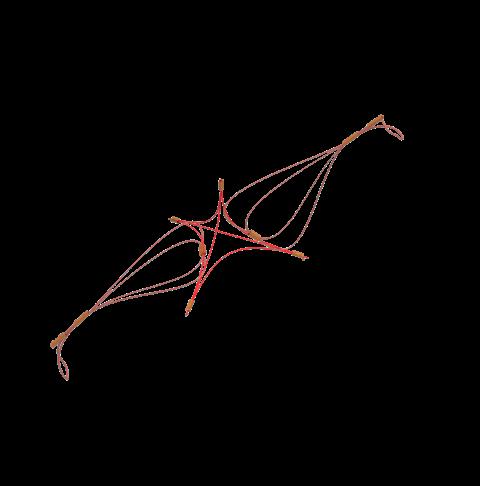
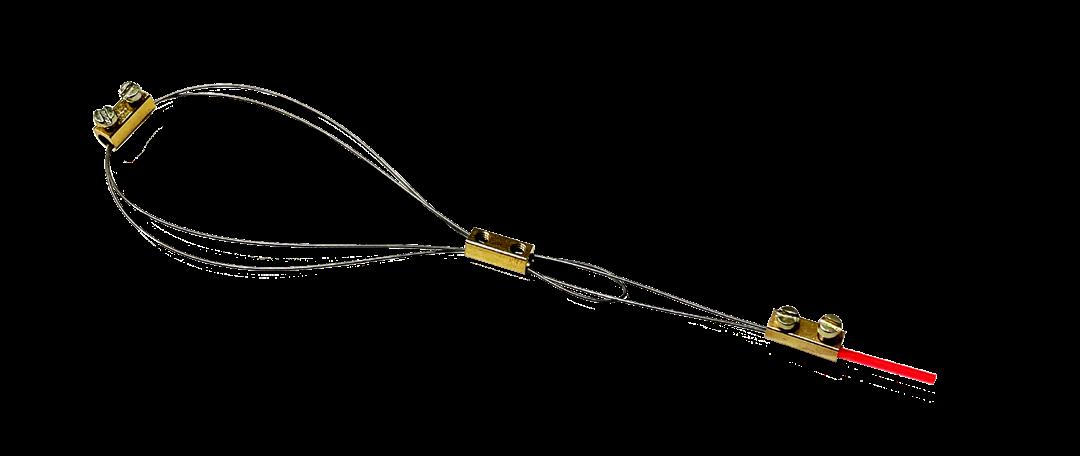
The connection point between two pyramids are facilitated throught the attachment of our active, slider

MOVEMENT + BENDING STUDIES
edge the points of the pyramids to the mobile wire within the movable loop, we can afford a basic expansion or contraction of the space
Asbetween.seperate entiries, the pyramid and the slider act oppositely.
11
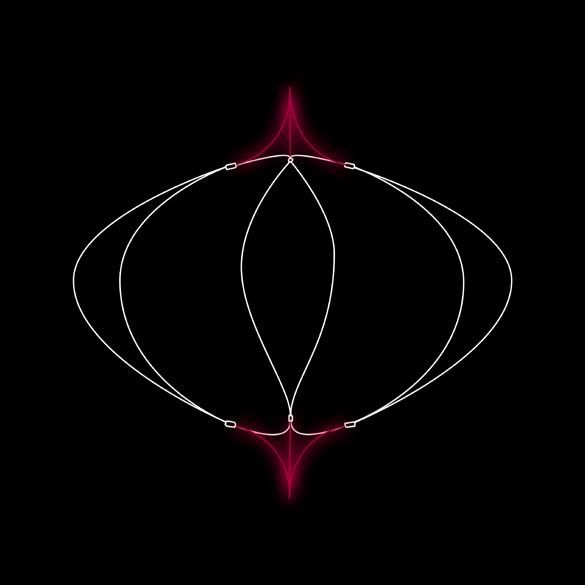
The slider creates it’s own internal tension through the deformation of the






Thewires.pyramid
is fixed in it’s body, only changing when applying outside forces. Here,when pulling and pushing the slider handle, a reaction is caused where the outter loop expands or contracts, creating and movement that scales the distance between two wires.





Bycomponent.attaching
VARIATIONSARRANGEMENTSPART
13
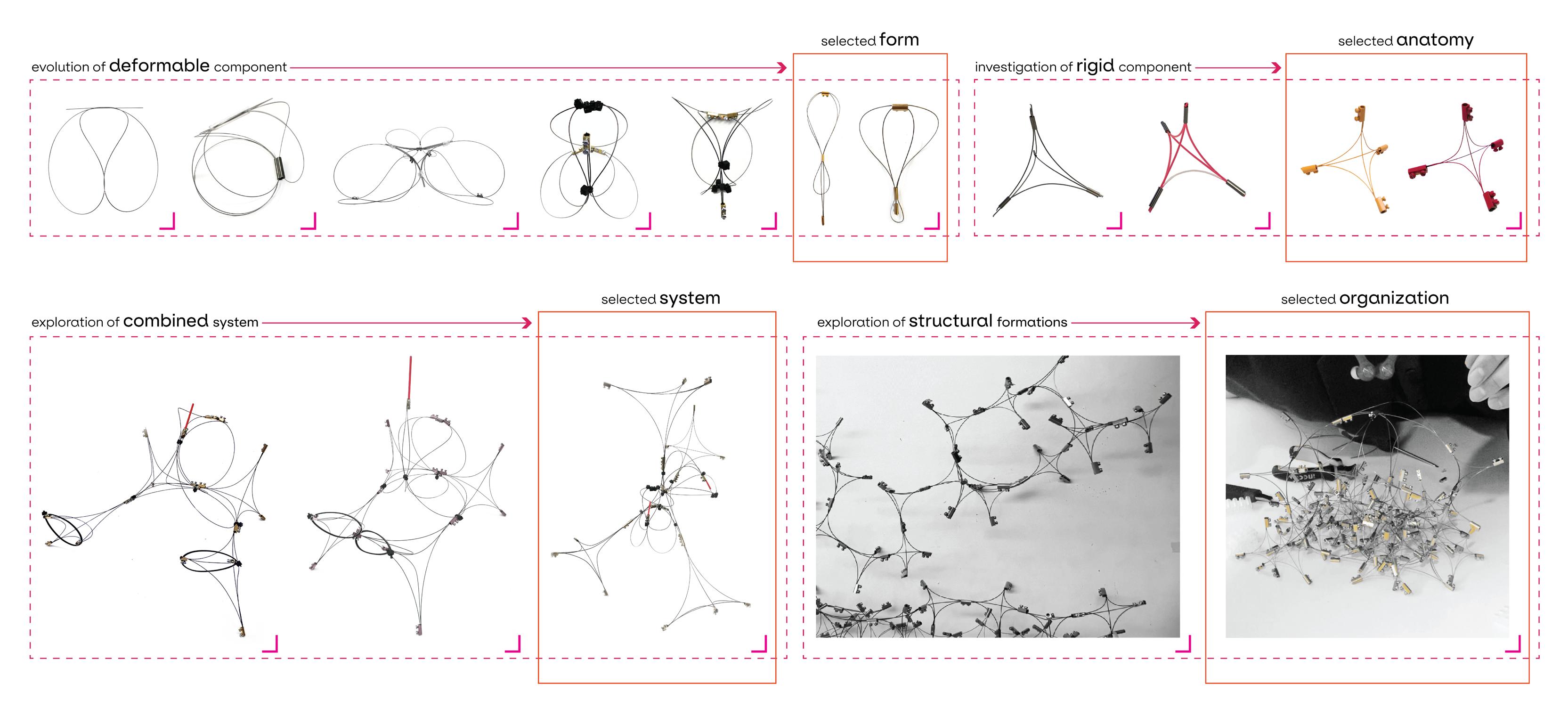
the formation was key to understanding the system we would ultimately decide upon. Exploring 4 prototypes with 4 connection points, 3 prototypes with 3 connection points, and 2 prototypes with 2 connection points, we could explore various scales of organization within the composite.
The exploration of structure pod combinations was necessary to organize a total structural concept. Combining the pyramids into various orientations and connection points, it became evident that the structure was versatile in itsITERATIONSaggregation.


DEFORMATION OF THE PASSIVE PROTOTYPE
CONNECTING THE PASSIVE PROTOTYPE (JOINT)
Finding14VARIATIONSrulesforthestructureof
15
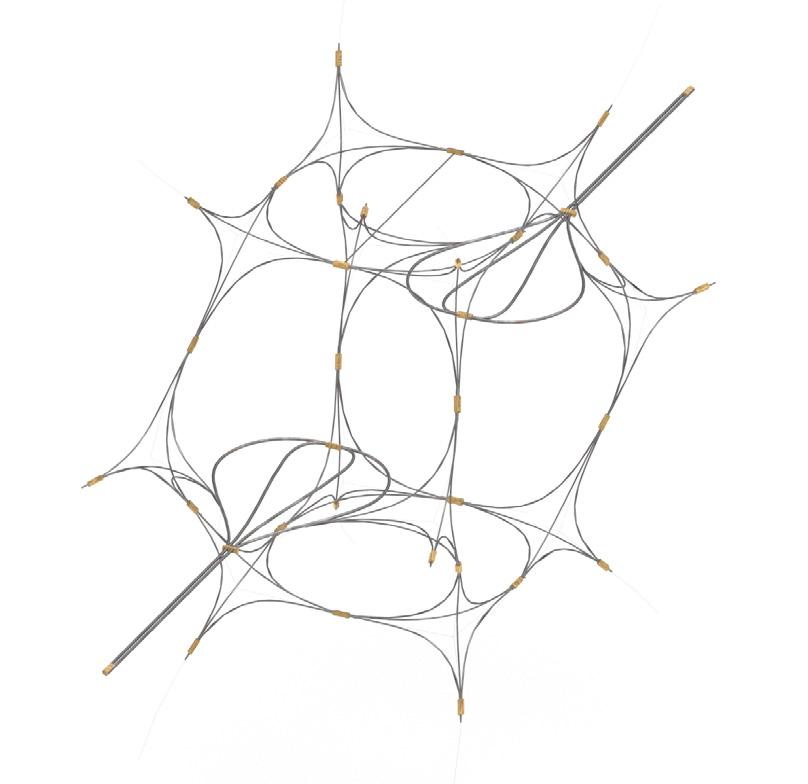

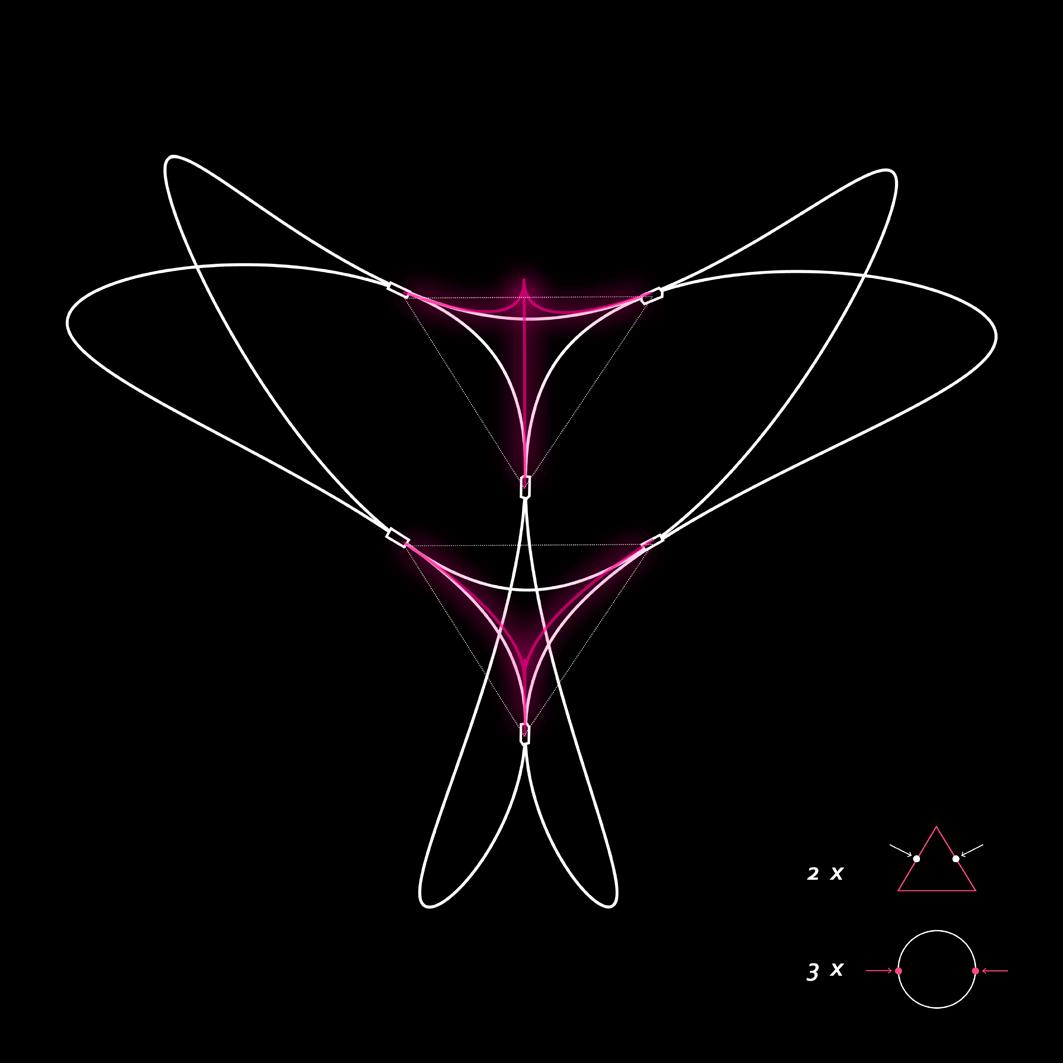
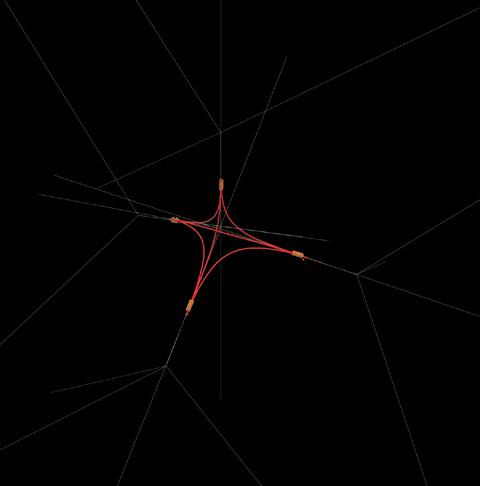
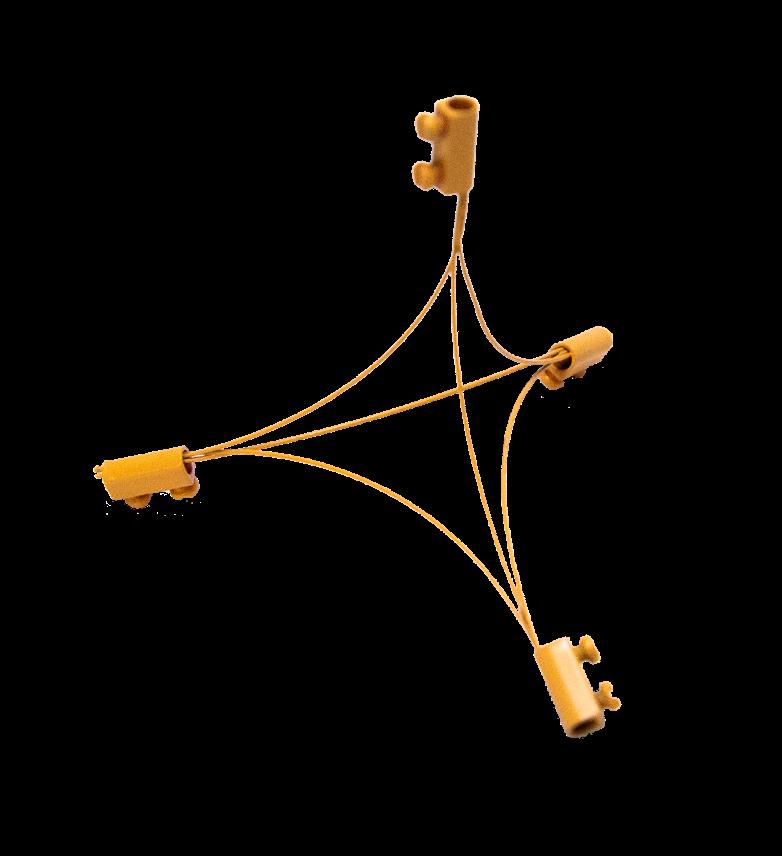
5 x + 5 2x x + movementcompressingseenofBycomprisingevery2ThisBASEMODULE16COMPONENTmoduleiscomprisedof5pyramidsandsliders.Thereisacenterpyramid,inwhichpointisattachedtoanotherpyramid,a5partpyramidalstructure.attachingtwoslidersonoppositeedgesthecenterpyramid,theflexismostintheendpointsofthetriangles,andcomingtogetherwhenisapplied.


17 BASE MODEL

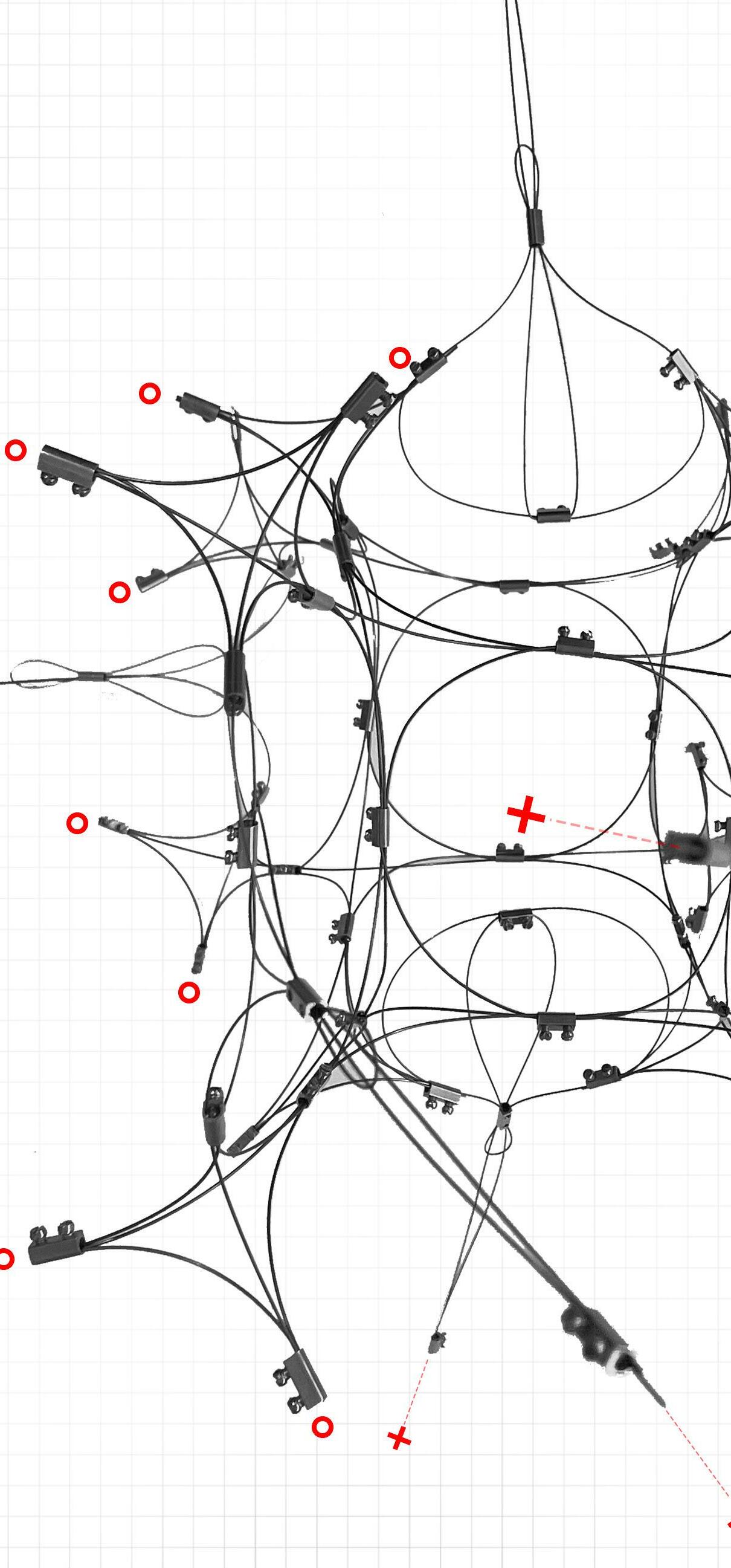
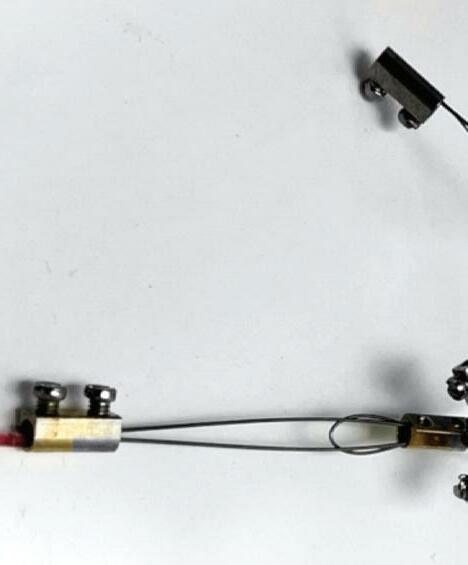
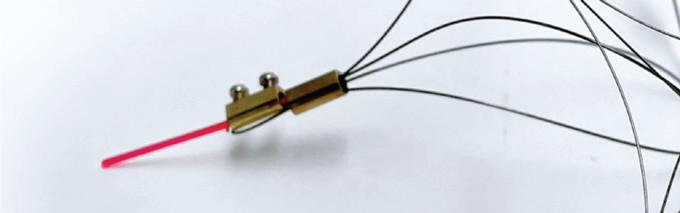
componentsthetherewhentheainformation,CreatingCONNECTIONS18asourcemoduleforourcloudallowedustoexplorevariationsconnections,leadingustodecideuponclampingmechanisminapplicationtoloop.Theclampingoftwotrianglesaloop/sliderispulled,wefindthatisatensionthatistransferredfromdeformablecomponenttotherigid(pyramids).
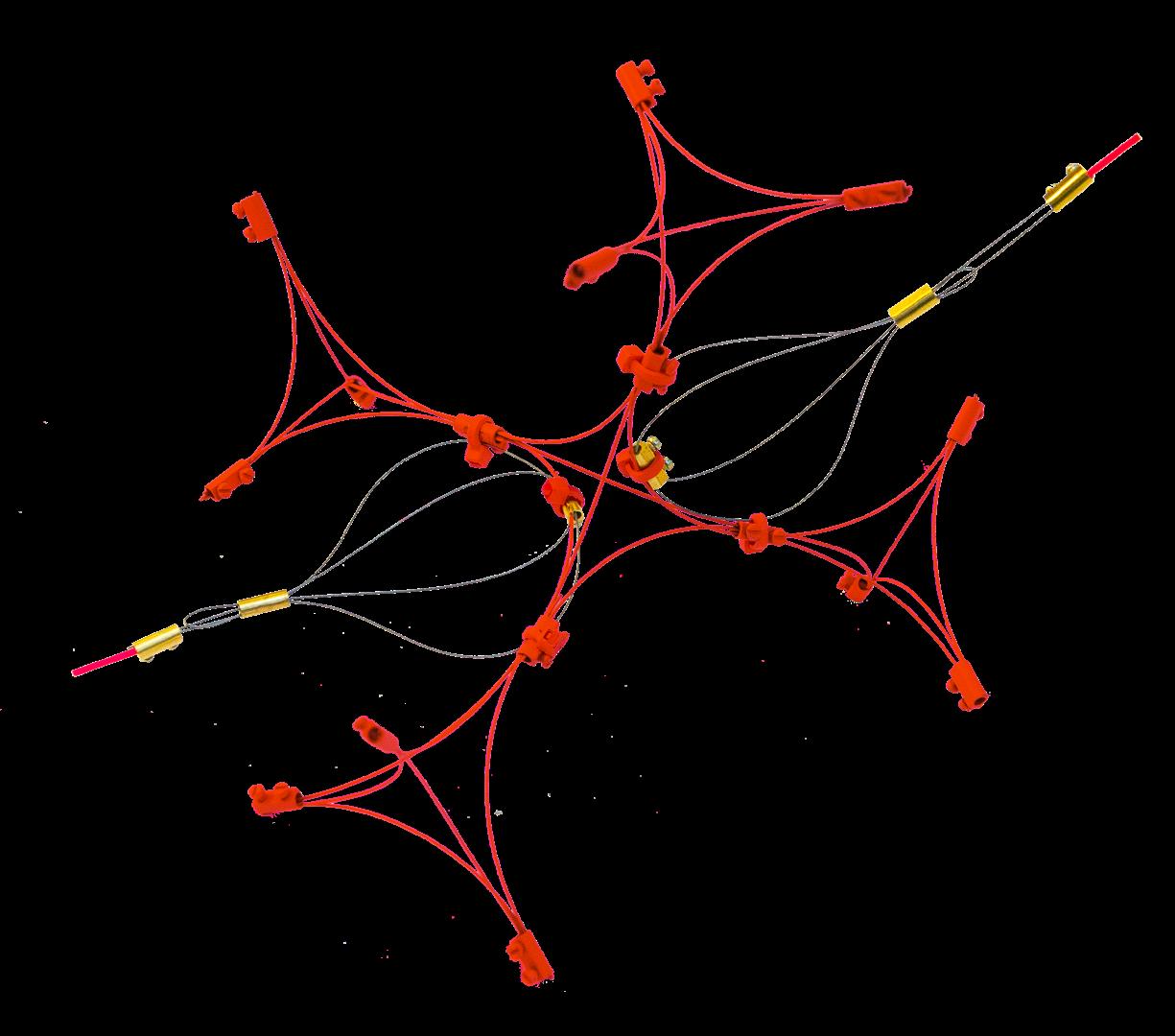
19 RED 2 SLIDERS 2 CONNECTIONS ORANGE1SLIDER 1 CONNECTION

In order to apply a more dynamic force to the overall combined structure, the module comes in two arrangements. The first is in red, being the most common, there are two sliders attached to the center pyramd. The second is in orange, a less common module in the cloud, there is only one slider attached to the center pyramid.
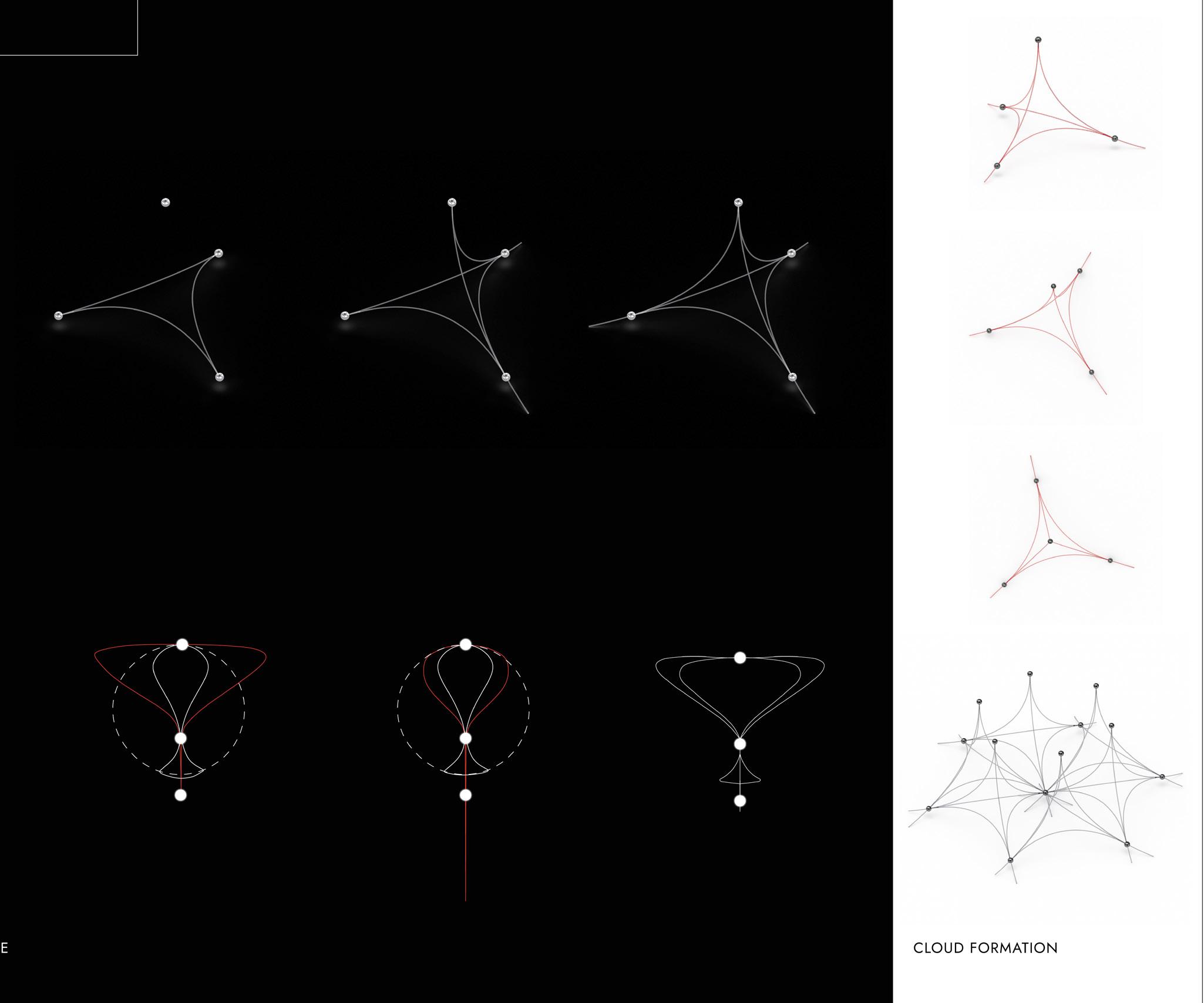
throughforform.tomoduleexploredposedTryingORGANIZATIONtocombineonemodulewithanotheraproblemforustosolve.Wetheideaofachainlink.Witheachbeingalinkinthechain,weareableexpandthemoduleintoamoredynamicJustaswell,atheseformationsallowanextremevariationindimentionalitythetensionaquiredwithintheslider.
21 / State 1 / State 4 / State 2 / State 5 / State 3 / State 6 ConnectionSimulation

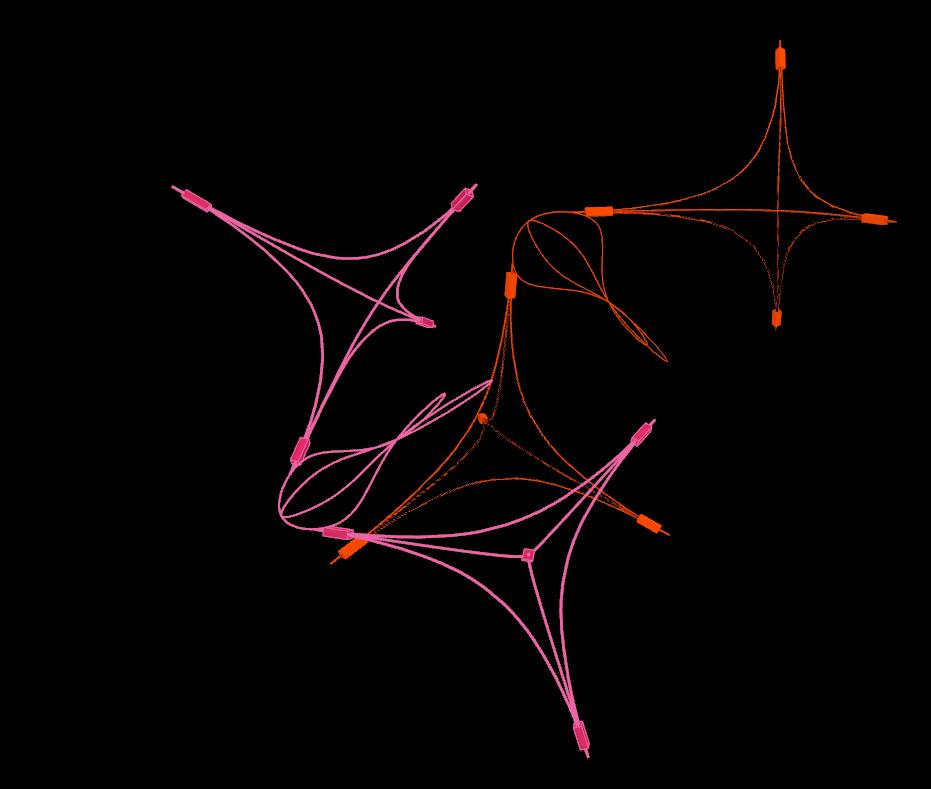
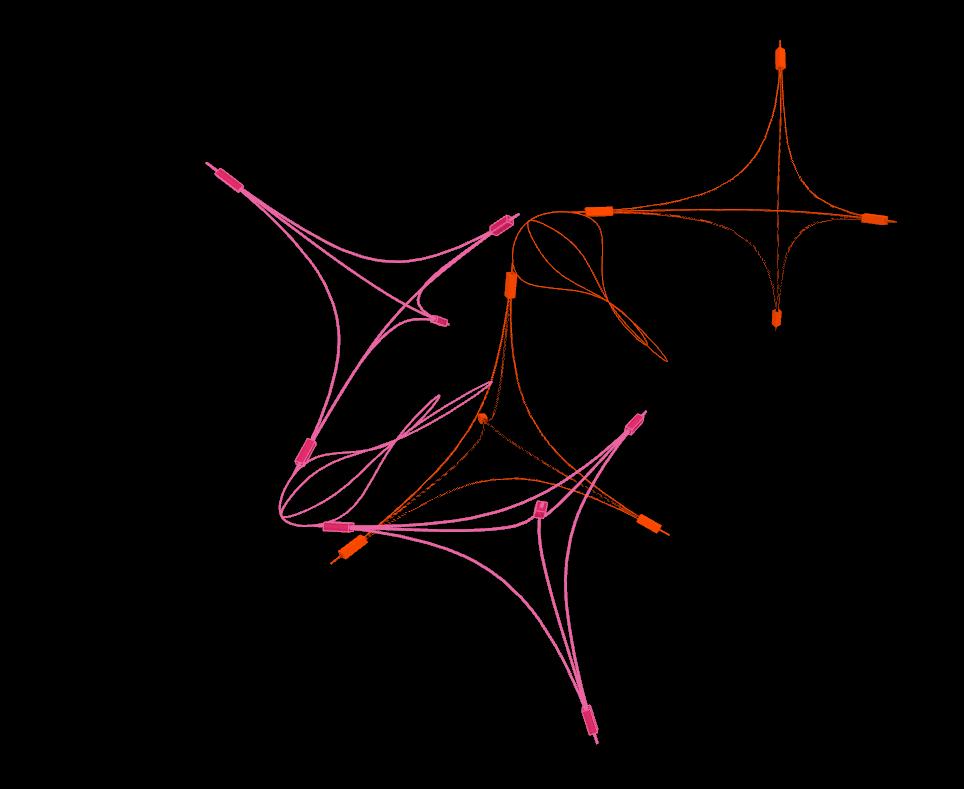
By connecting module with connector, we try to build a linear system that can transform by tightening the sliders. But this system didn’t meet our expectation, because it is not dense enough to form a structure.
FORMATIONSCLOUD
/ Experiment System 1
We tried to build a Frame structure by connecting 20 single pyramids, then attached the sliders to it. This system shows a higher posibility of transformation, but its frame became a constrain to its form.

ITERATIONS / PROCESS/ExperimentSystem2
/ Experiment System 3
We experimented with the three main types of system in the frame. The well-organized system, rectangular grid, and triangular grid performs well, they shows a higher flexibility but dont quite meet our final expectations, we want higher stability and density.
ITERATIONS24 / FINAL Density:Flexibility:Stability:GRID/RECTANGLEDensity:Flexibility:Stability:GRID/TRIANGLEDensity:Flexibility:Stability:ORGANIC/CHAOTICHighLowHighMediumMediumLowLowHighMedium
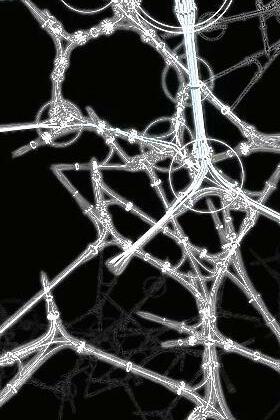
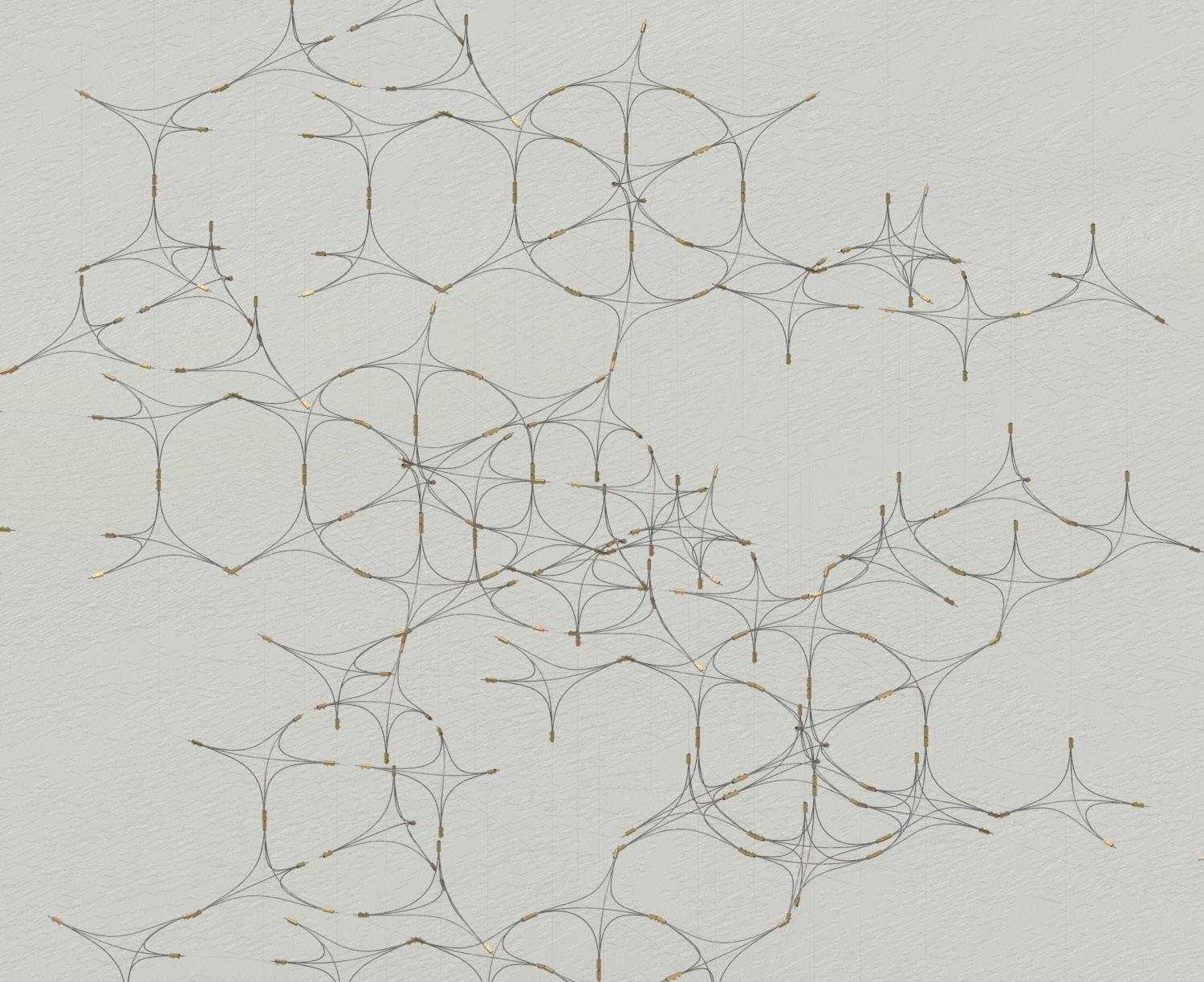
So we finally opted for a more disordered / chaotic organic system where the basic units are connected to each other in a more complex way. Without using connectors, BASIC UNIT INTERLOCKING with the others after we tightened the sliders.

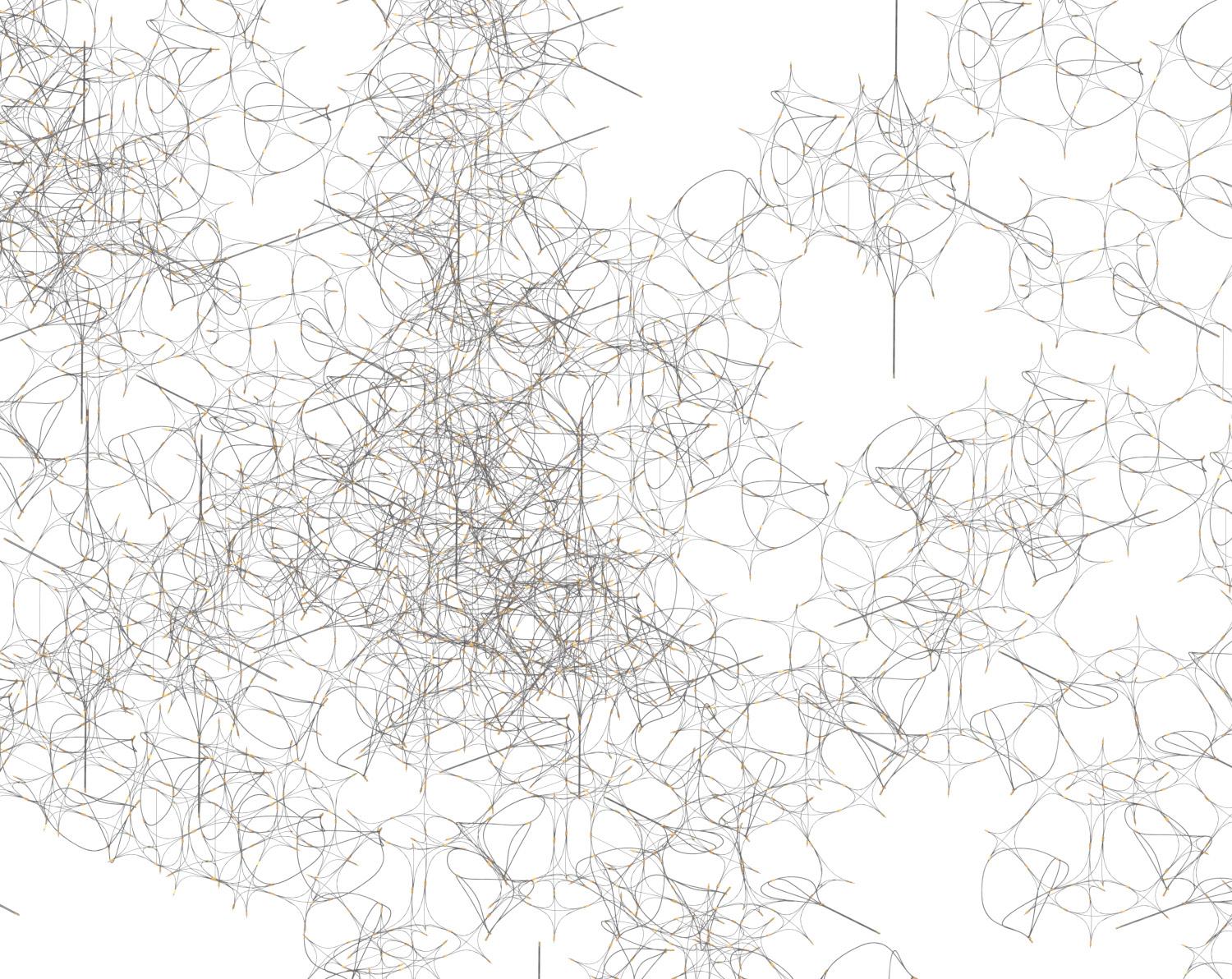
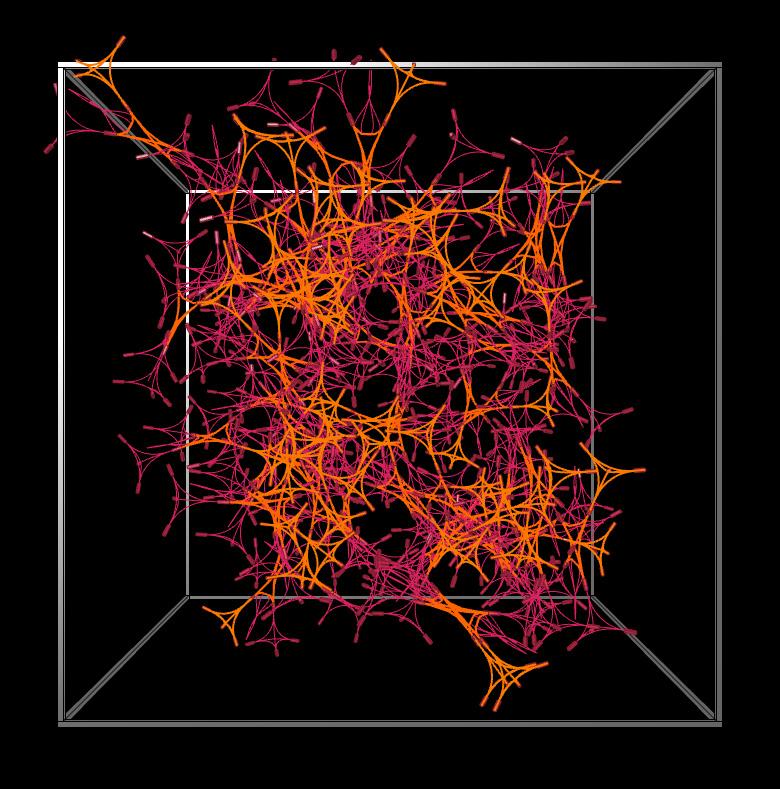
Finally, we decided to build a cloud aggregation, because this form gives us more construction possibilities and is sufficient to form a high density of transformable assemblies.


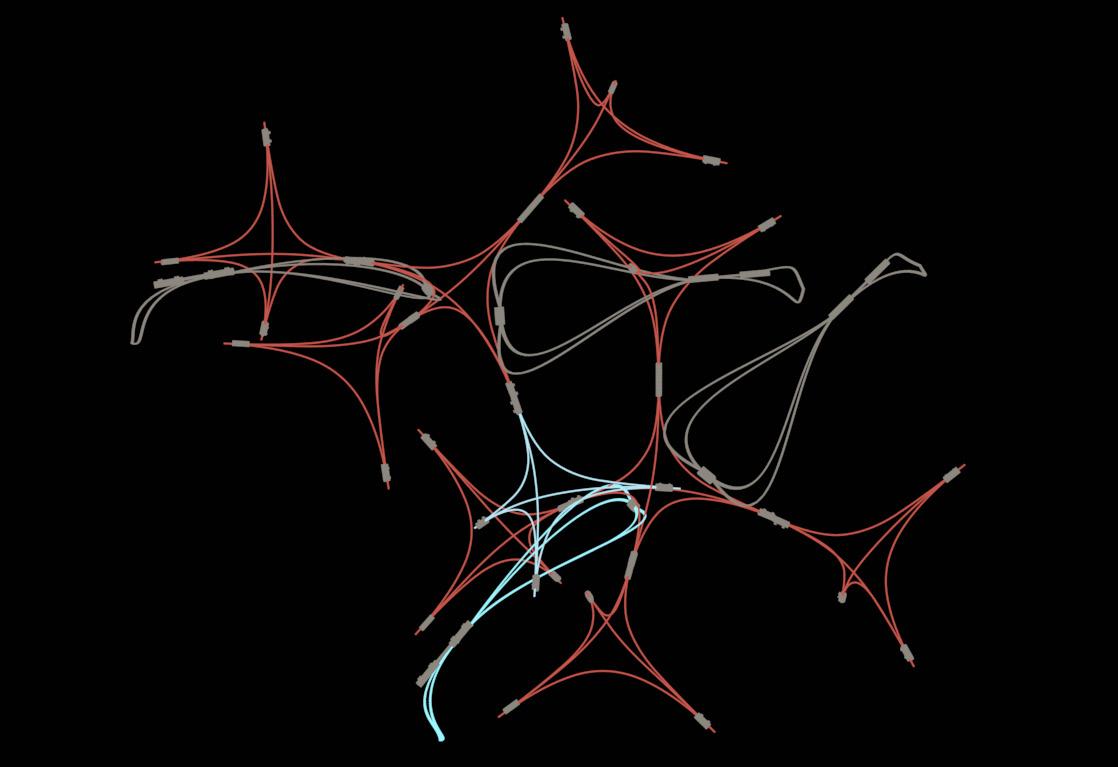
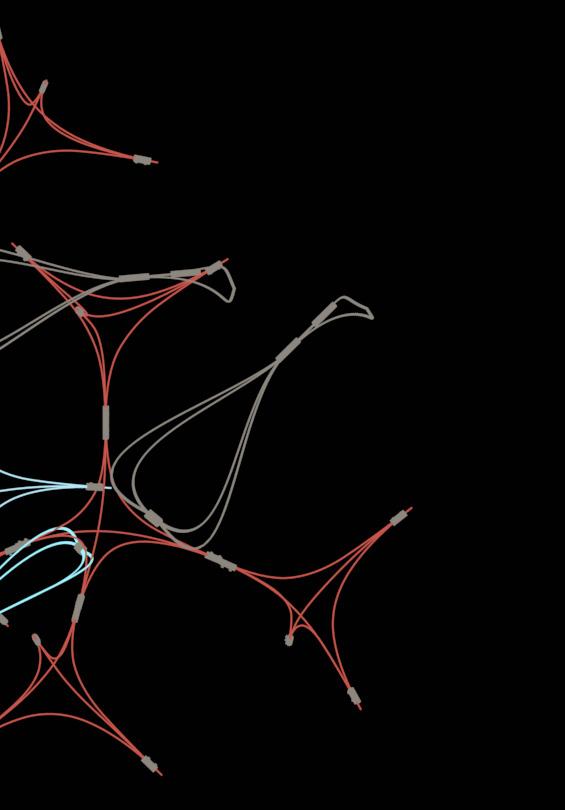
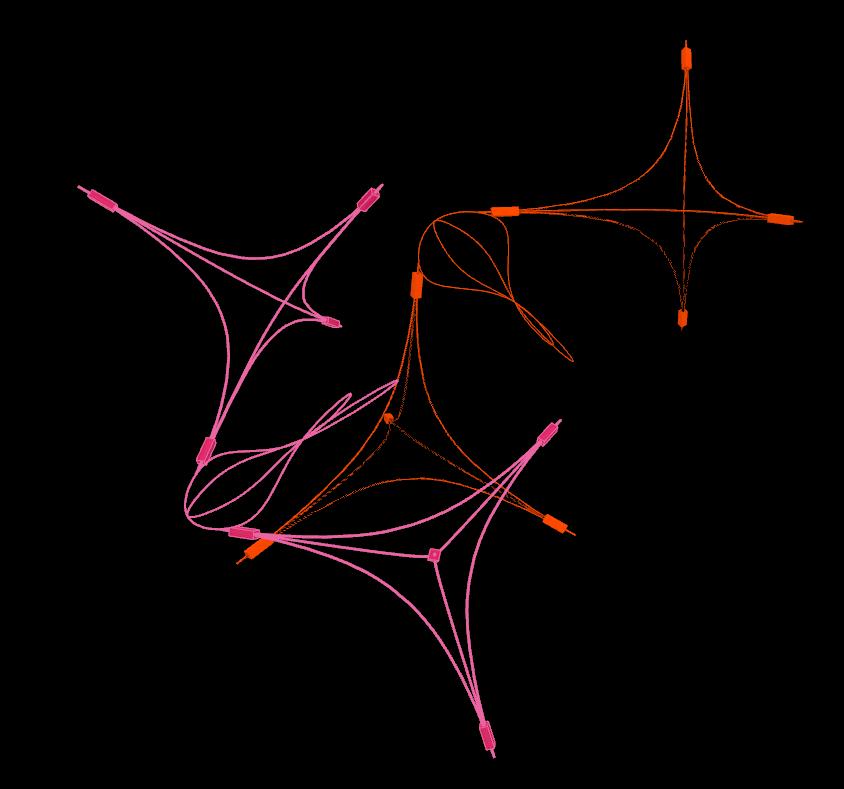
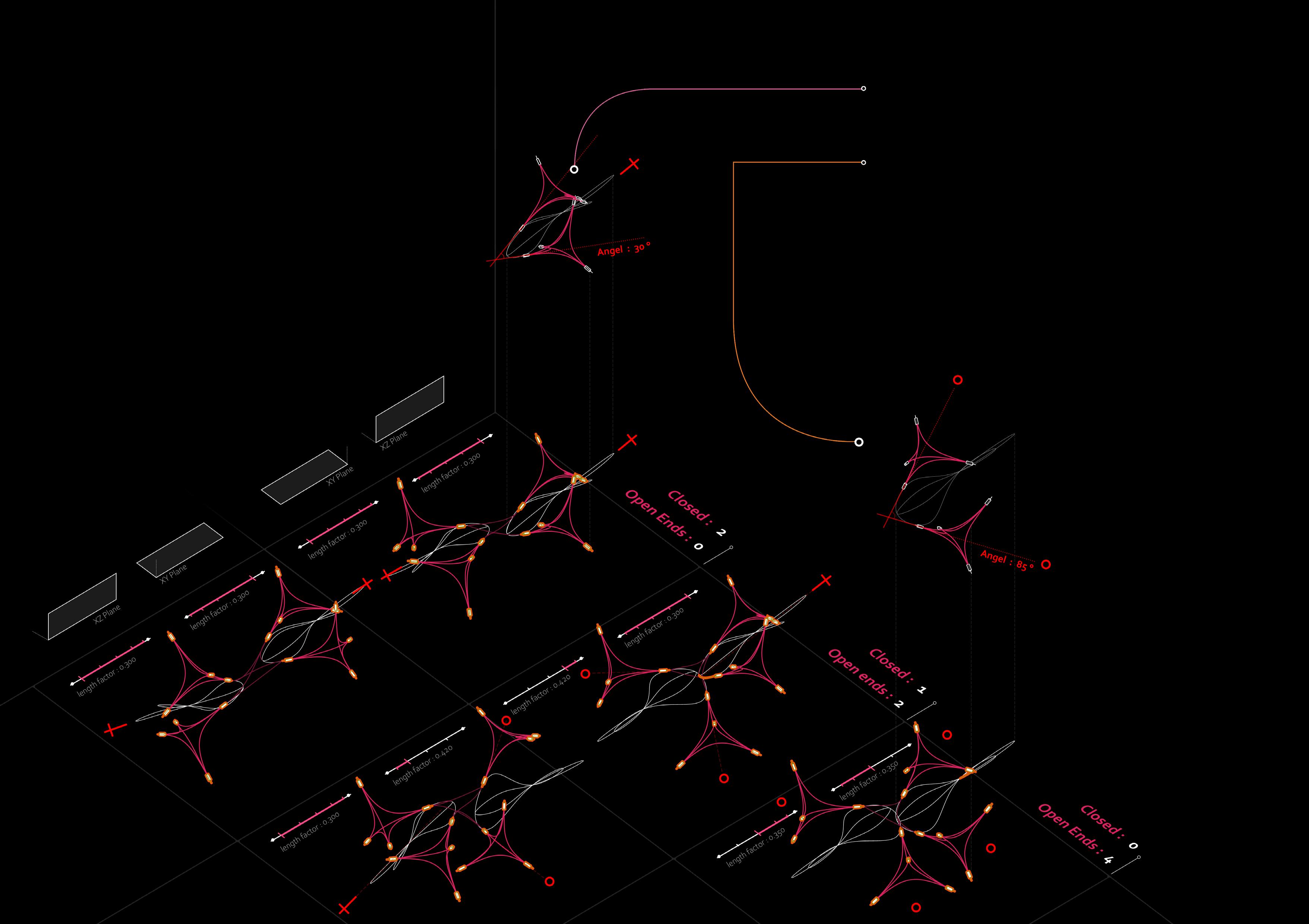
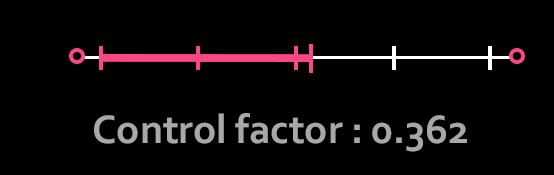
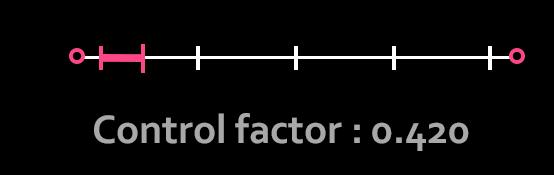
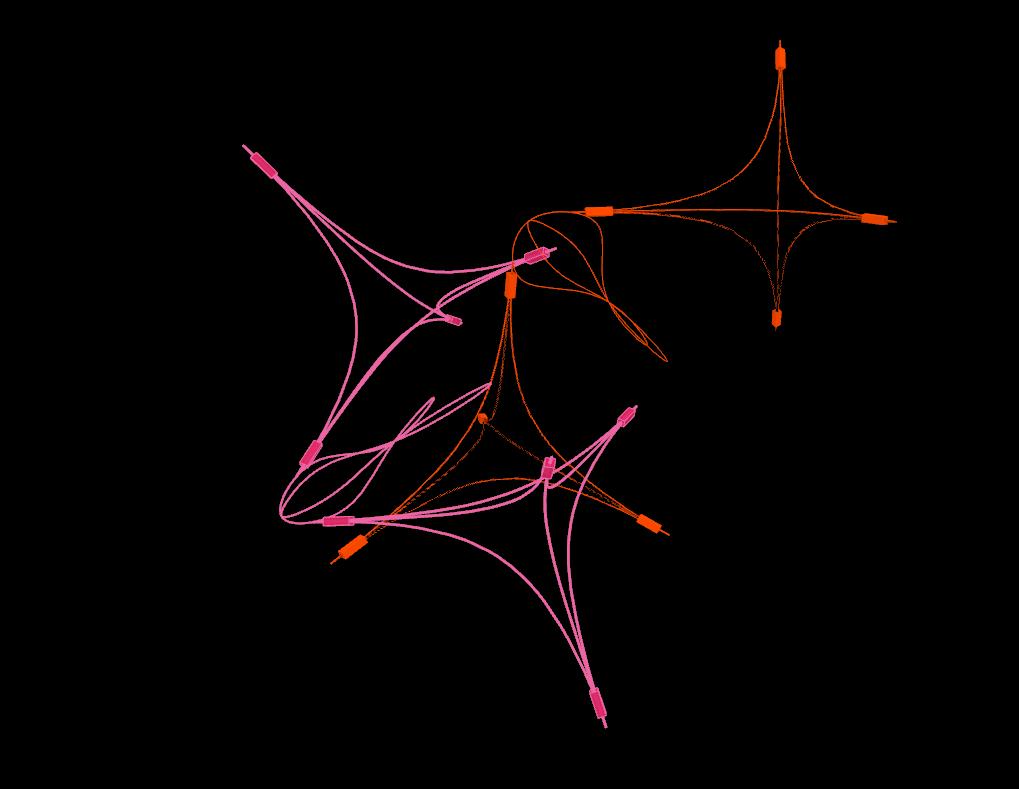
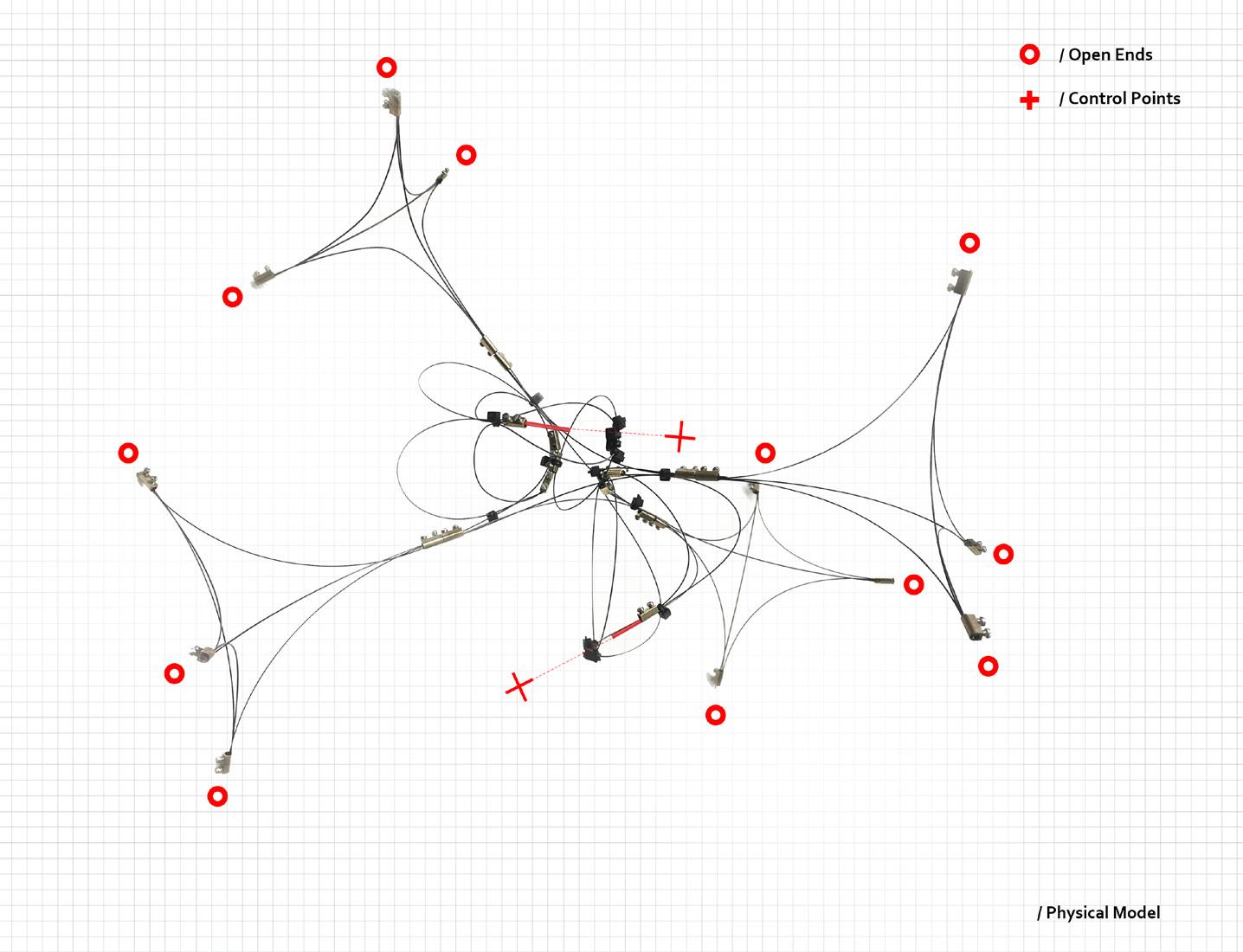
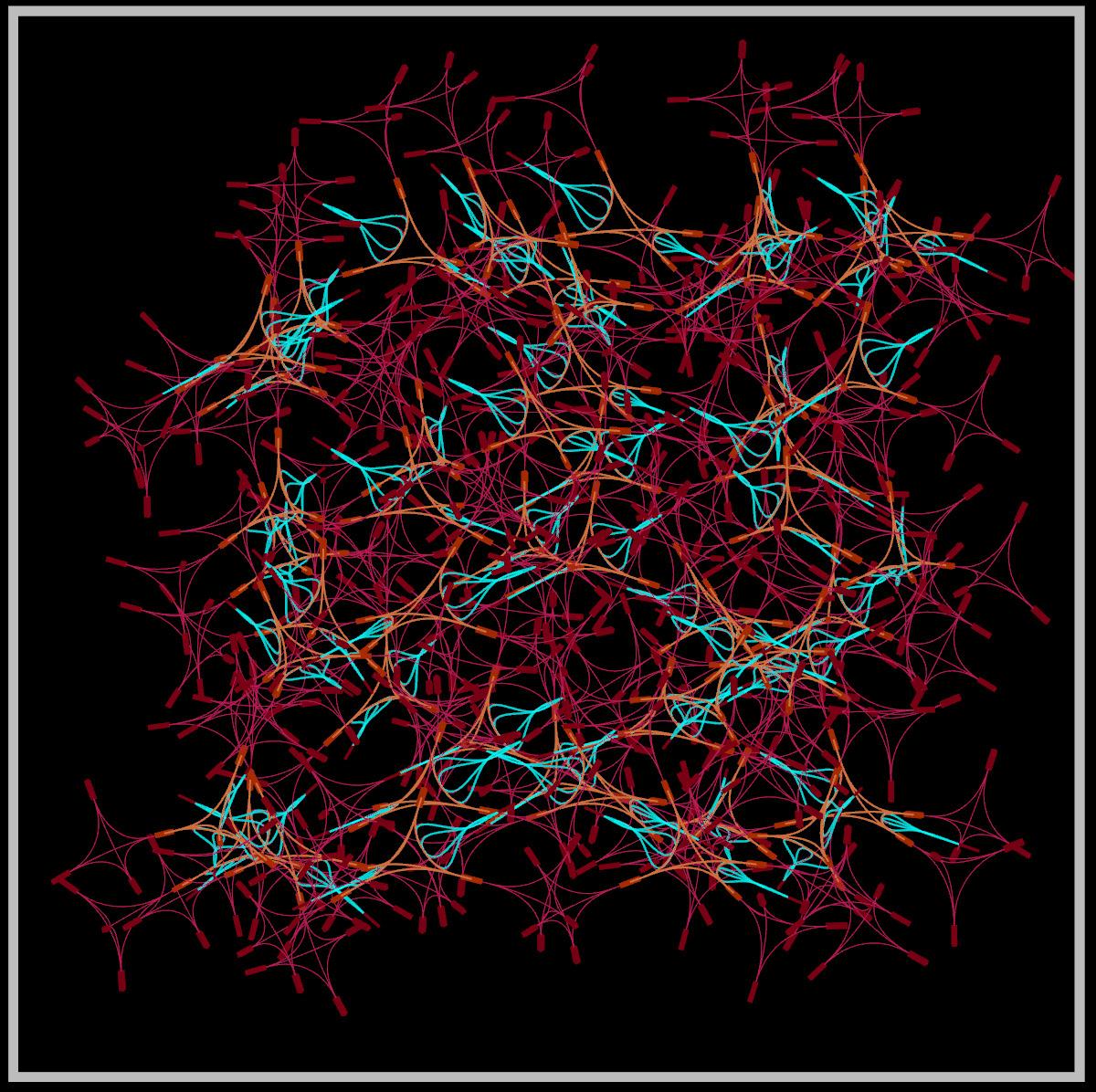
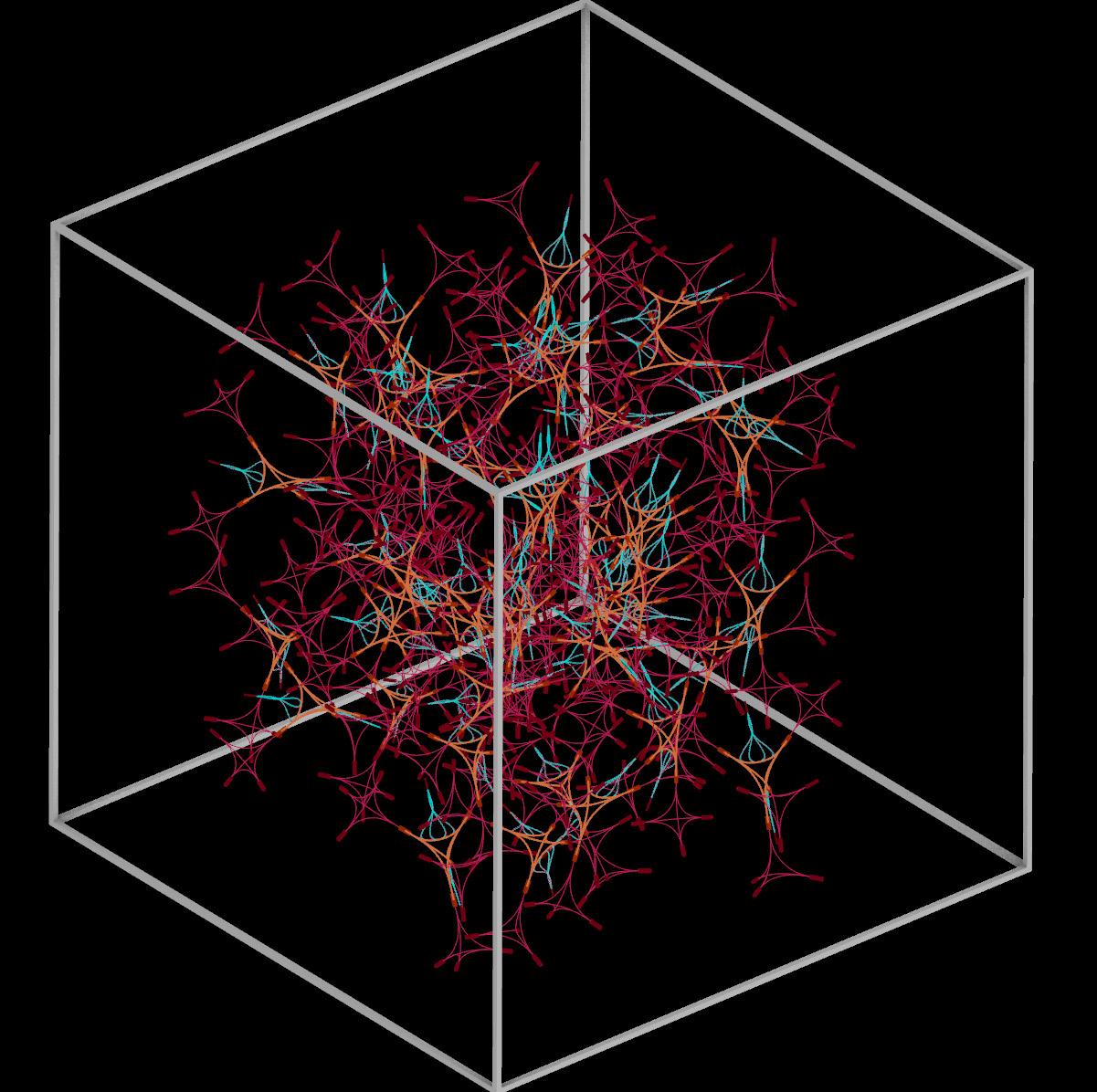
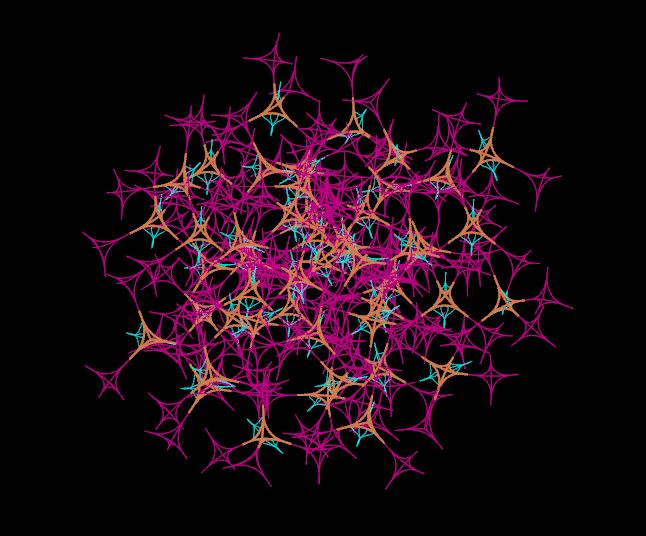
25 askkddj aklj clksd kjdhfkjs hdlkasj kc lkasjd kajsdlka jcan al kjasds lkjalkxc ja l;jasc lkaslk kaxnc l assk dak sjdlajsdl as dkjalsk jdlkasj cxlj xlmc ;akxc;l ma; / Simulation_S1 Control Slider _ i 0.00 Control Slider _ ii: 0.00 / Simulation_S1 Control Slider _ i 0.40 Control Slider _ ii: 0.20 / Simulation_S2 Control Slider _ : 0.20 Control Slider _ ii: 0.00 / Simulation_S1 Control Slider _ i : 0.40 Control Slider _ ii: 0.40 / Simulation_S1 Control Slider _ i : 0.40 Control Slider _ ii: SIMULATION0.00 OF AGGREGATION






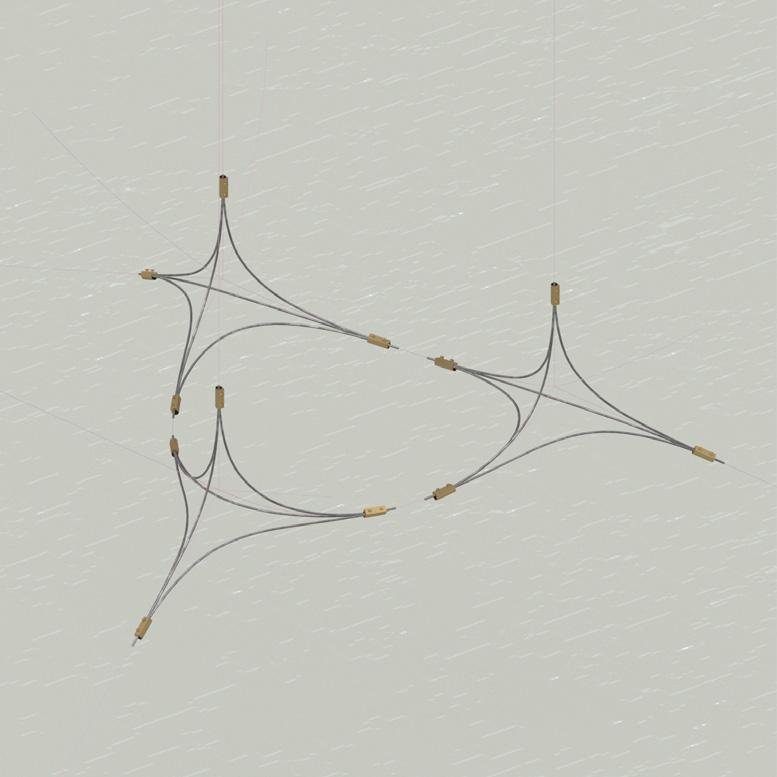
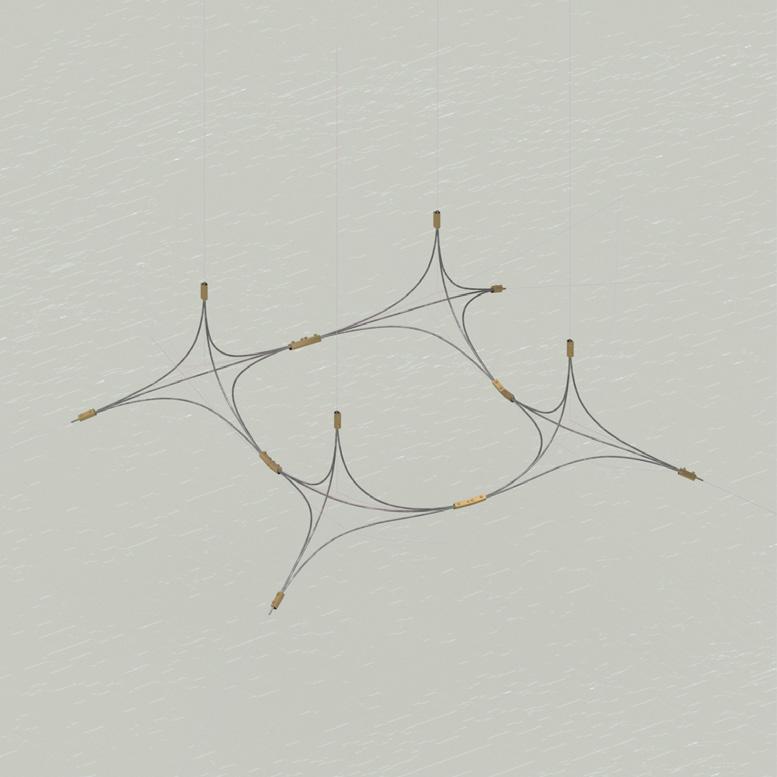
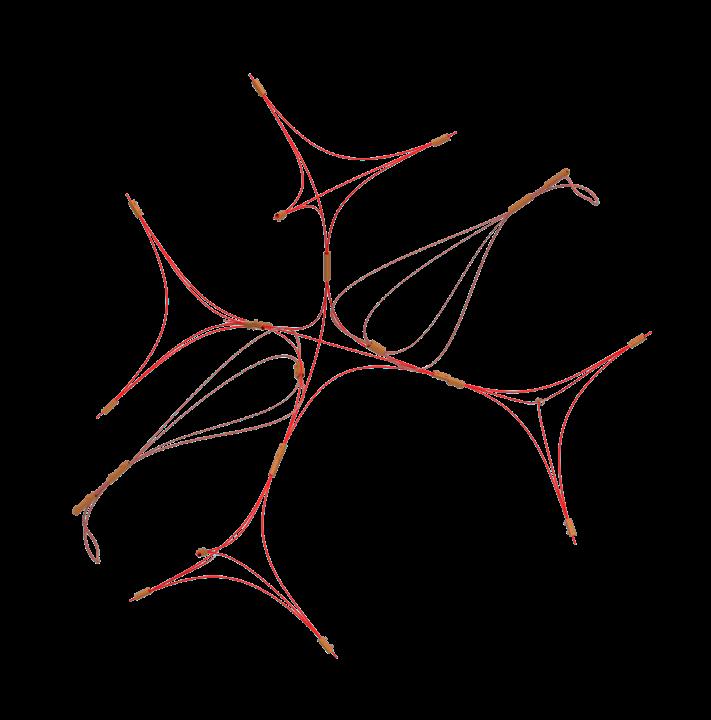
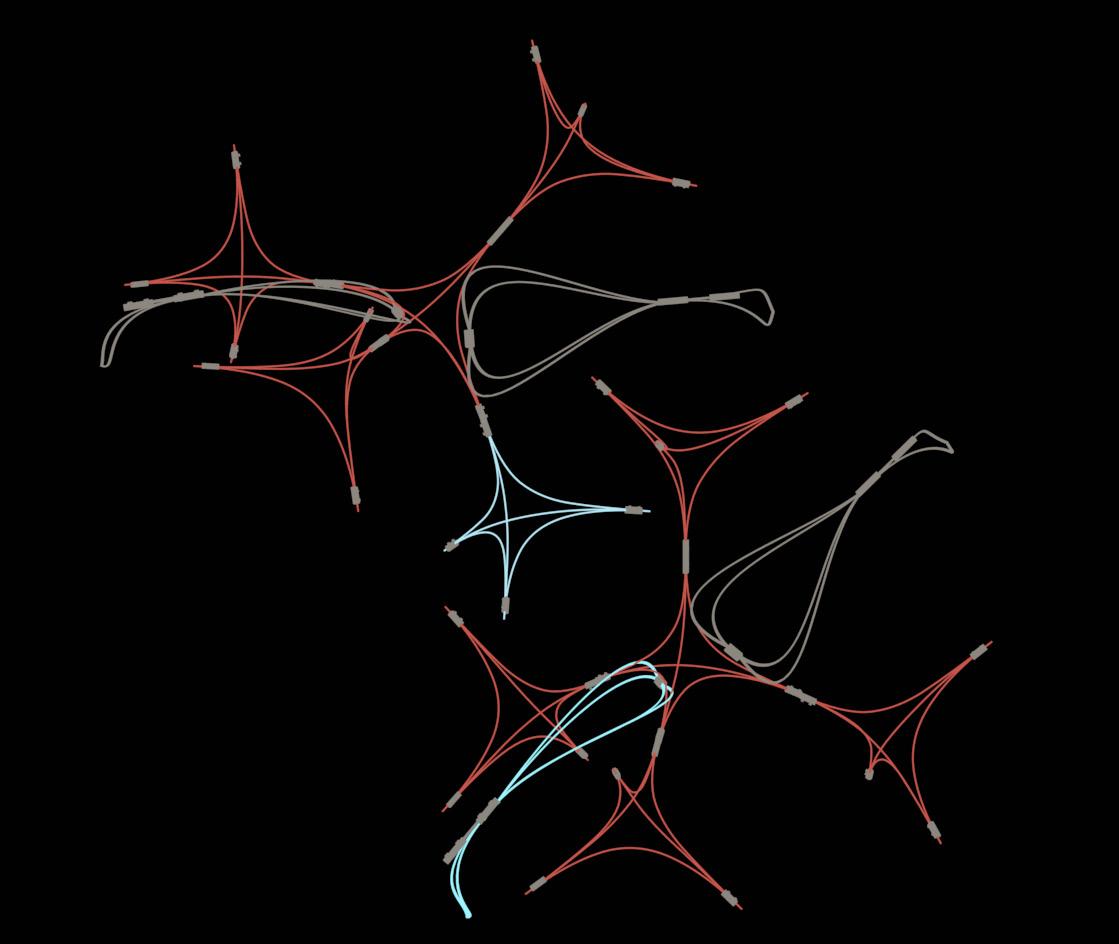
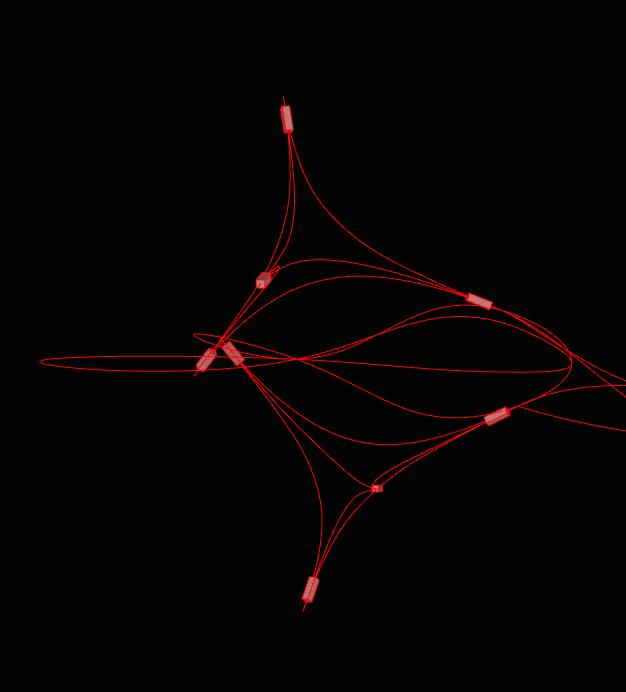
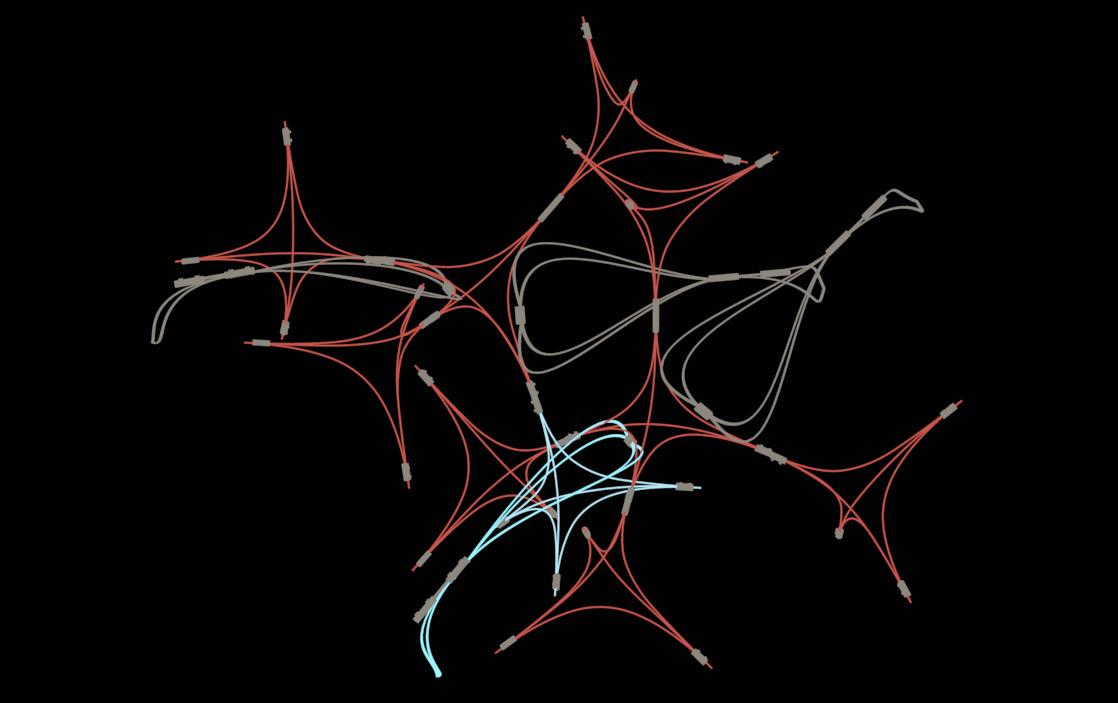
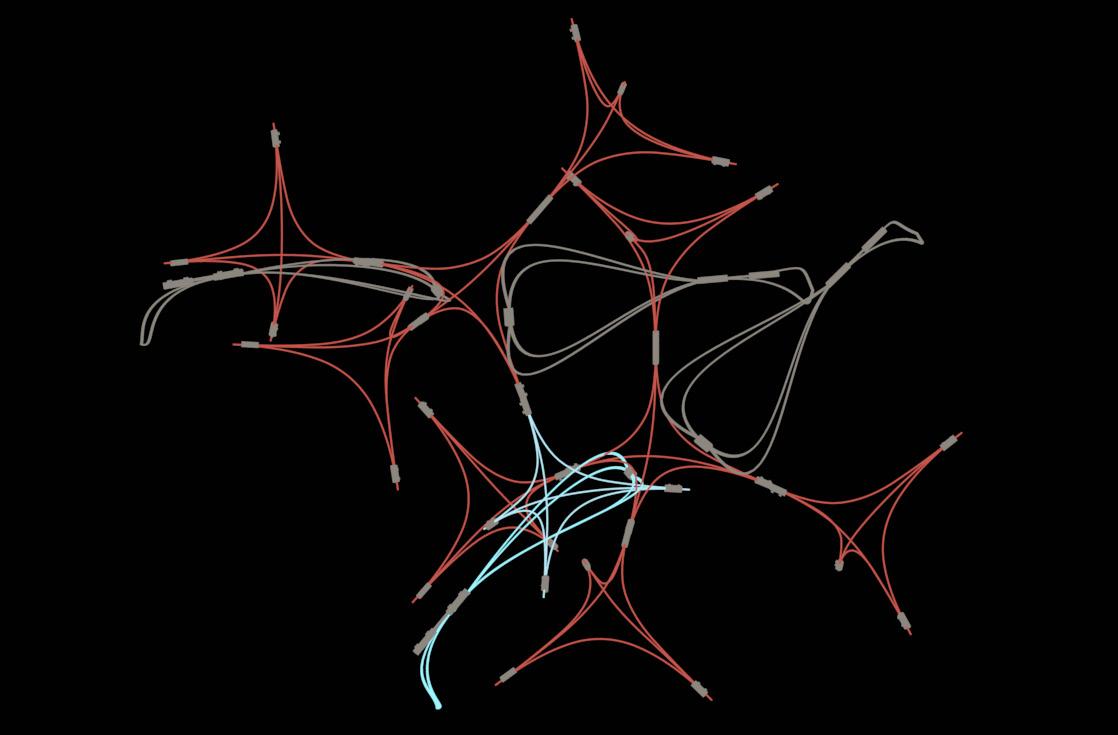
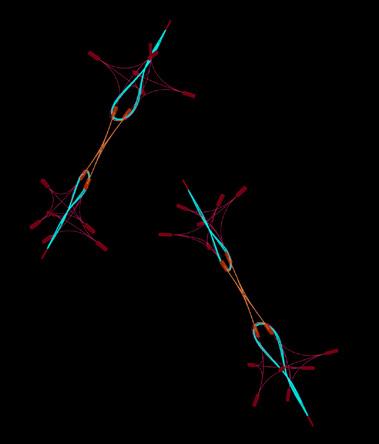
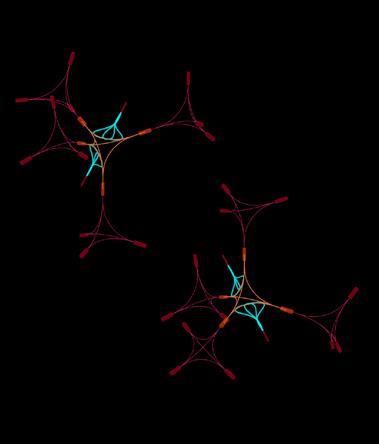
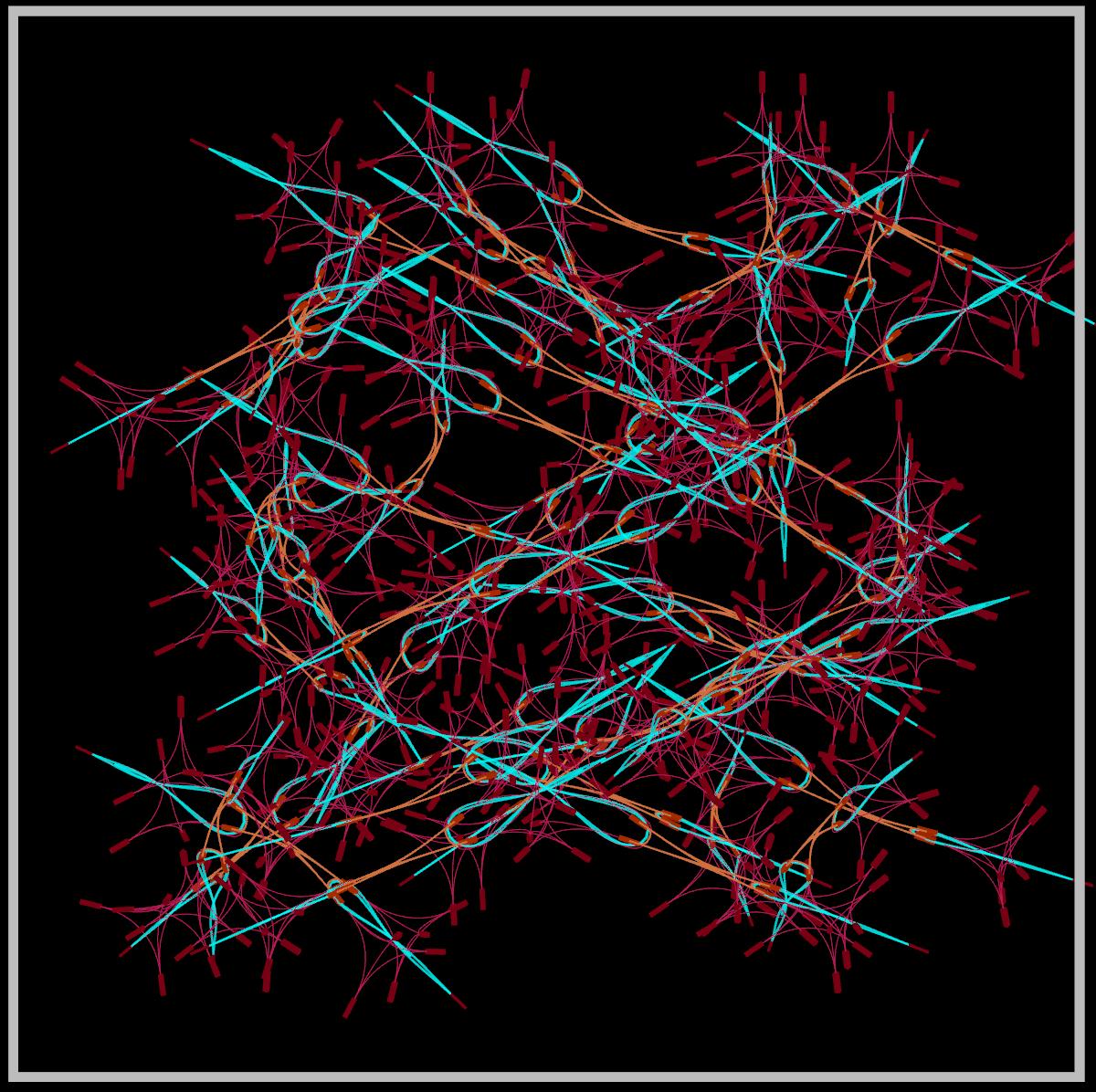
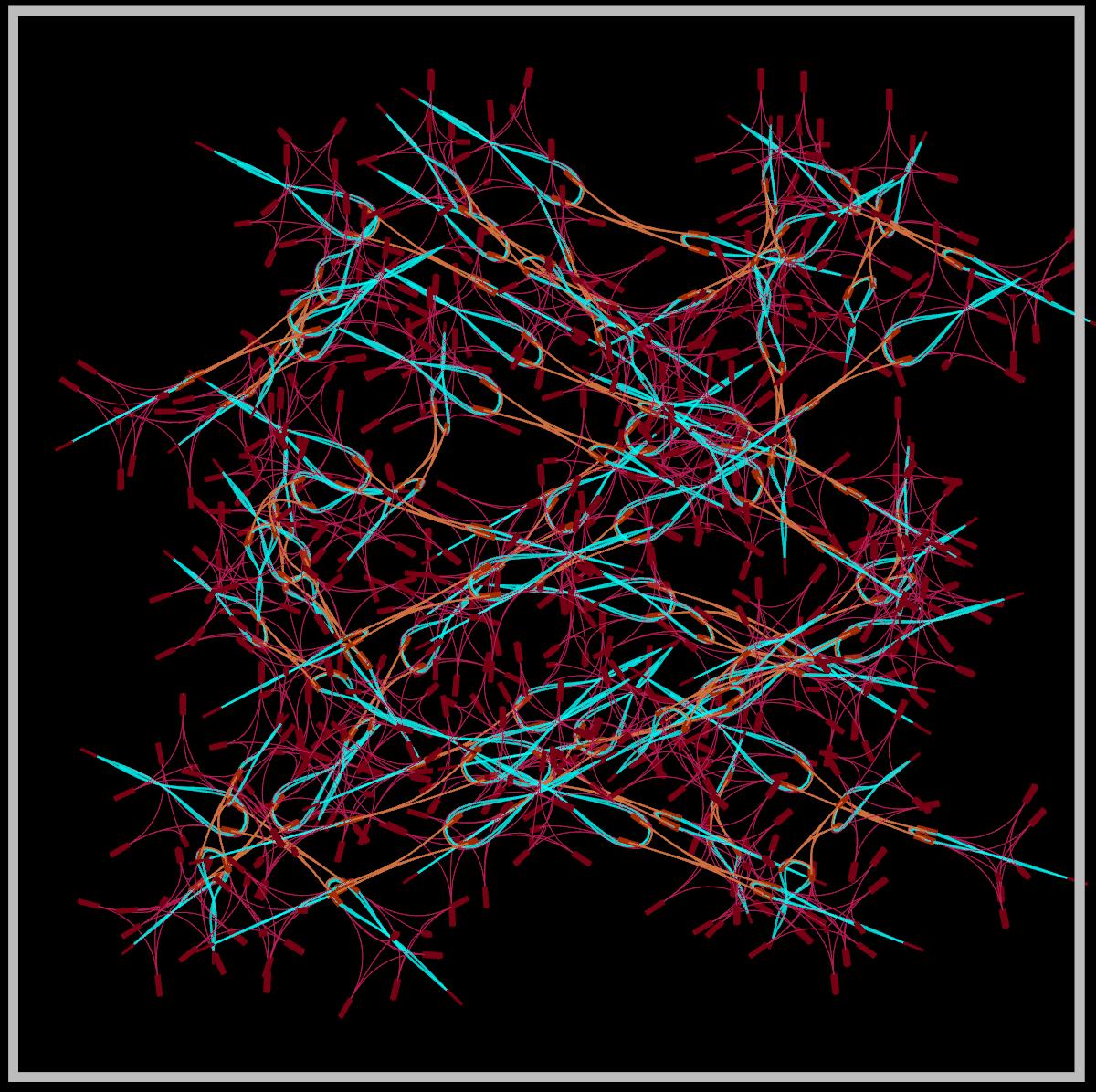
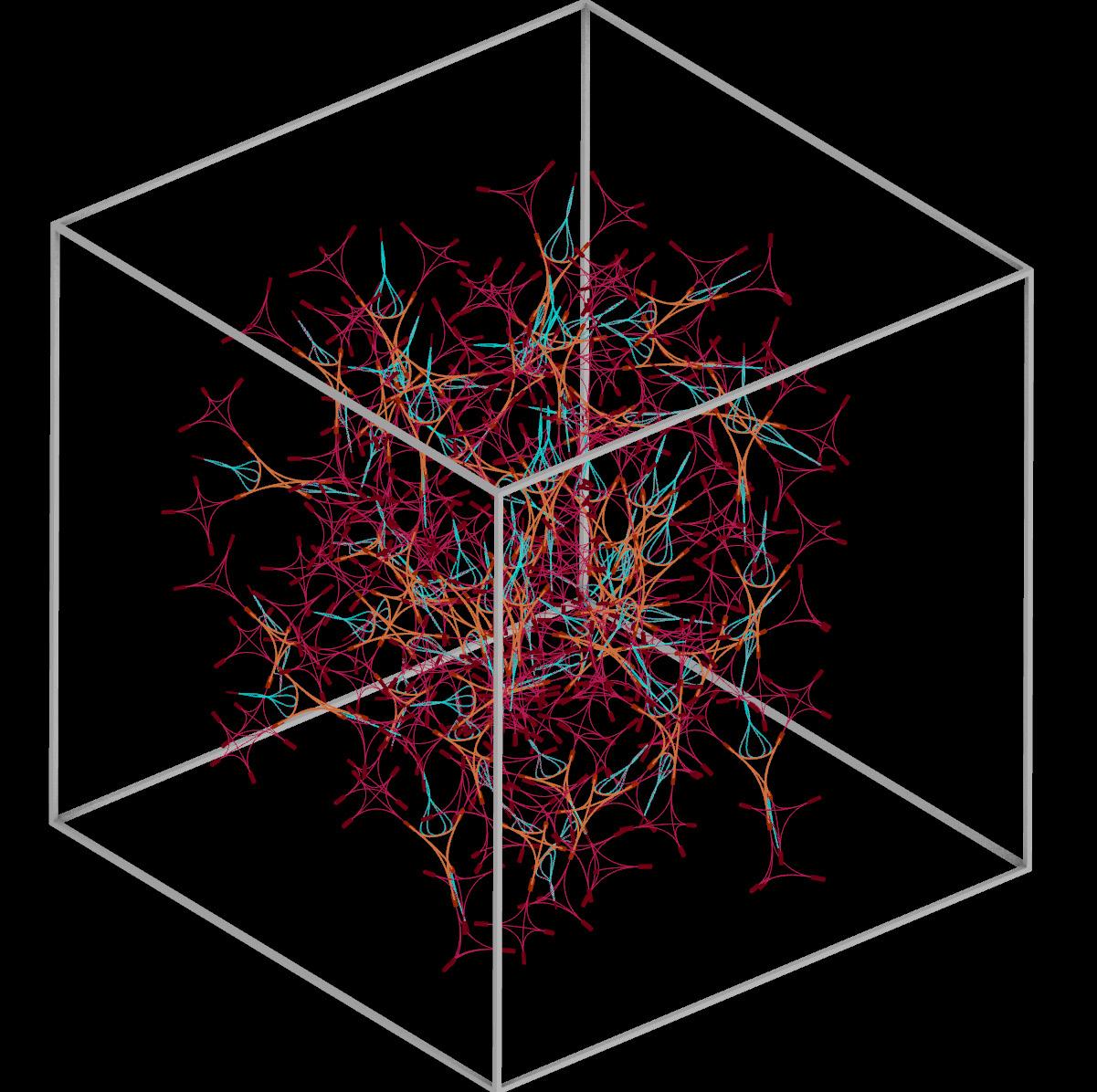
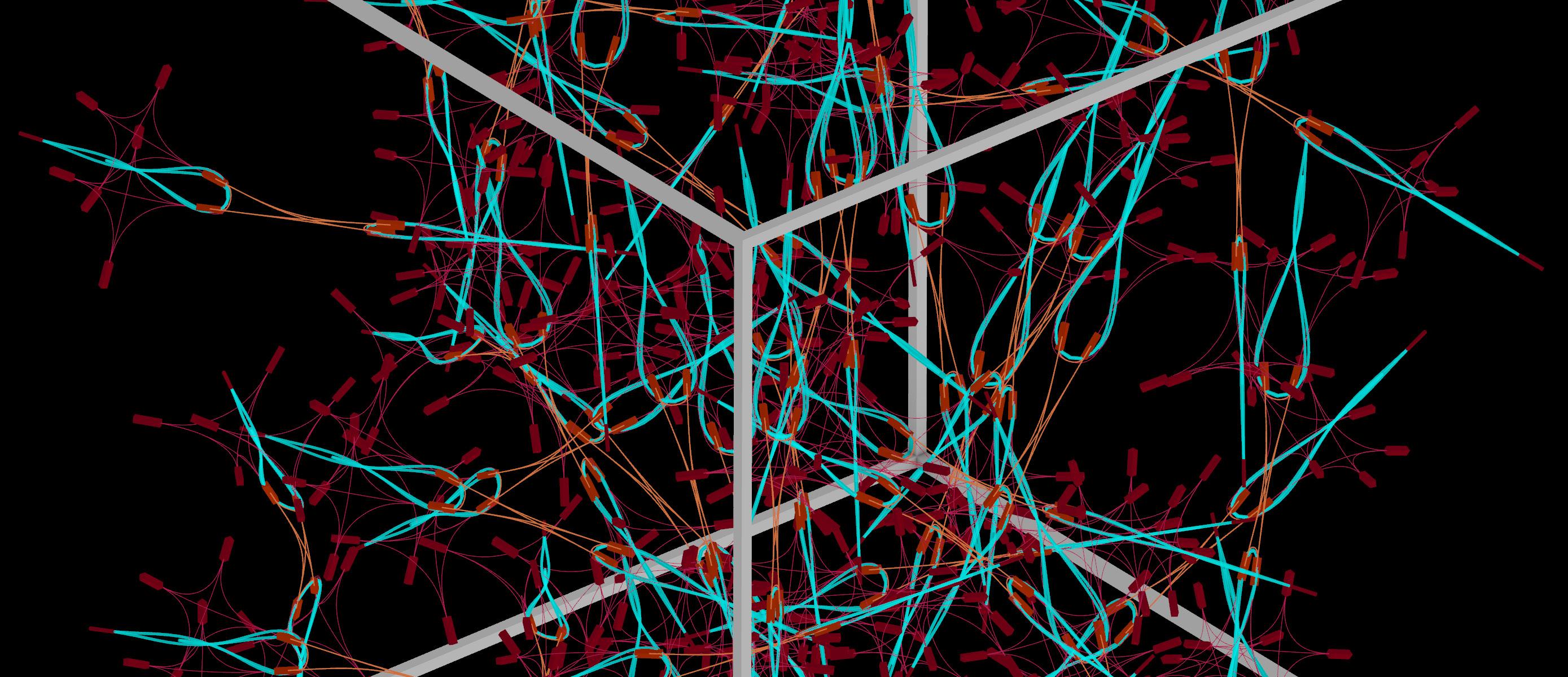
to hang on anchor points on a cage frame while gravity pulls the mass down for demonstration purposes, though it behaves the same without the cage frame. These forces lead to an initial Rest State. 3 Forces in the simulation areComponentFriction Collision Slider Pull for point adjustment During simulation, the system changes state from completely loosened to completely taut ‘Blue’ sliders. State 1 @ 10% Slider Pull 100% Rest, Relaxed Density State 6 @ 60% Slider Pull 50% Rest, Emergence of In b/w Voids RedOrangeBlue : Slider Components : Central Pyramids in ‘5-Pyramid’ Structure : 4 Corner Pyramids in ‘5-Pyramid’ Structure State 2 @ 20% Slider Pull 90% Rest, Relaxed Density State 7 @ 70% Slider Pull 40% Rest, Emergence of In b/w Voids State 1 @ 10% Slider Pull State 10 @ 100% Slider Pull
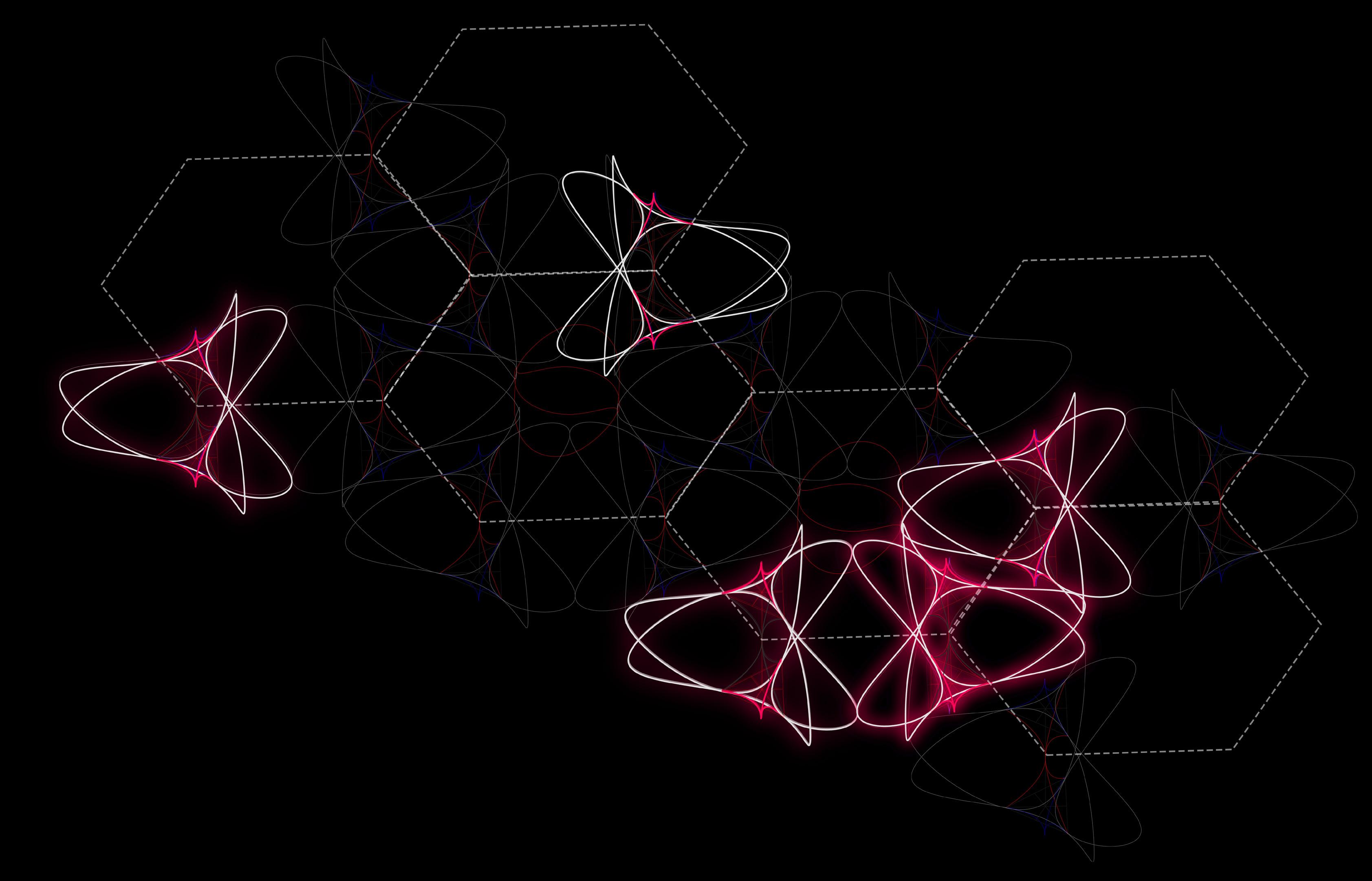
digitally assumed by populating points in a spherical volume, similar to the natural state of physical aggregation.
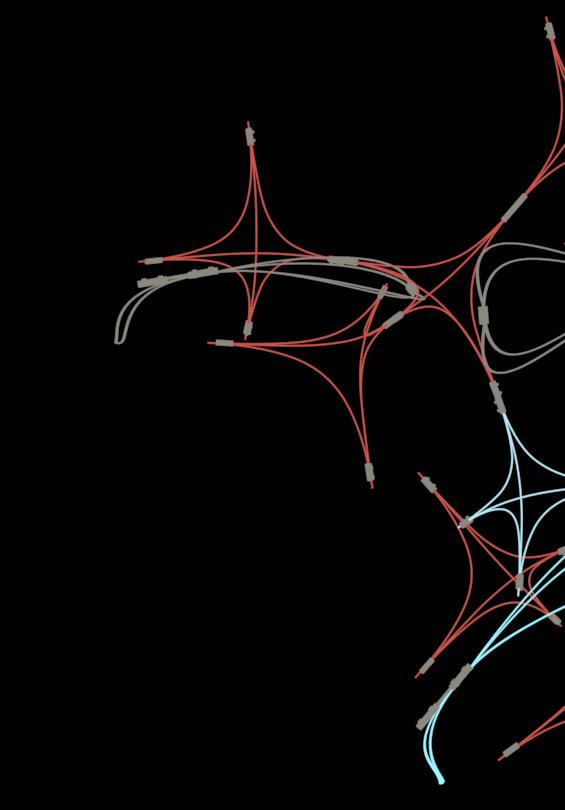
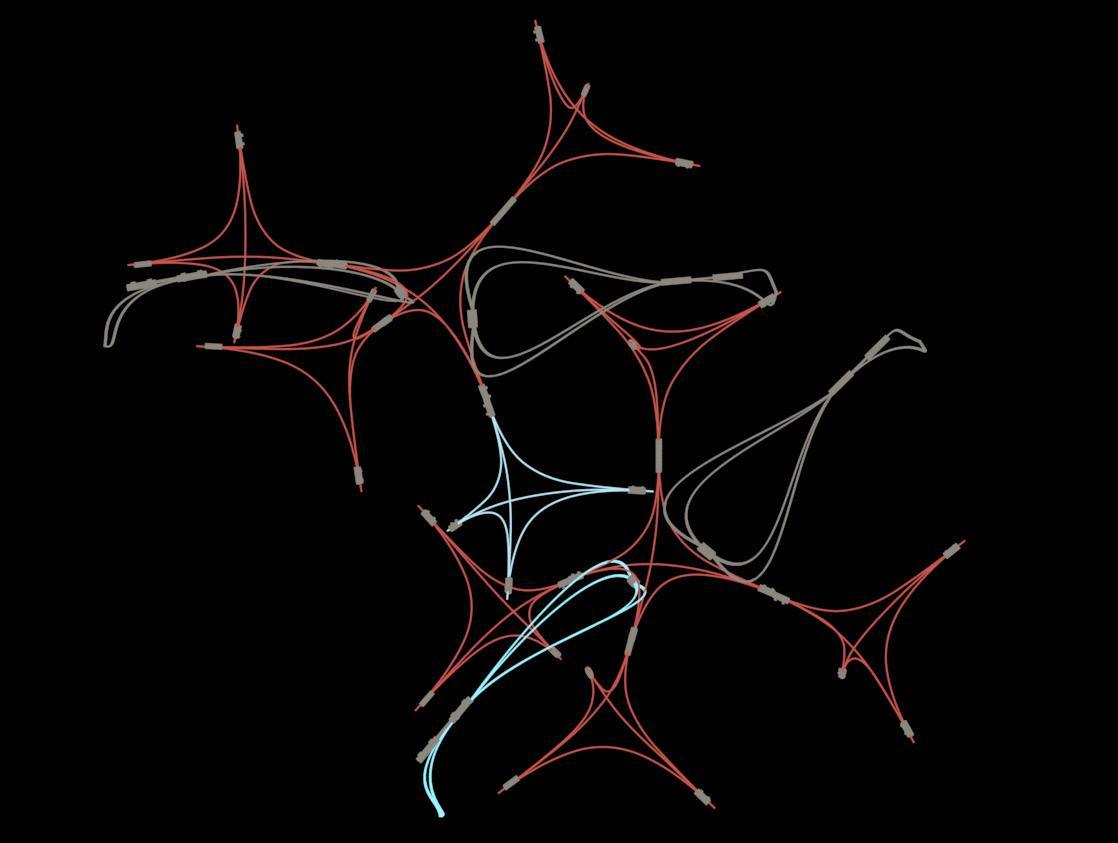
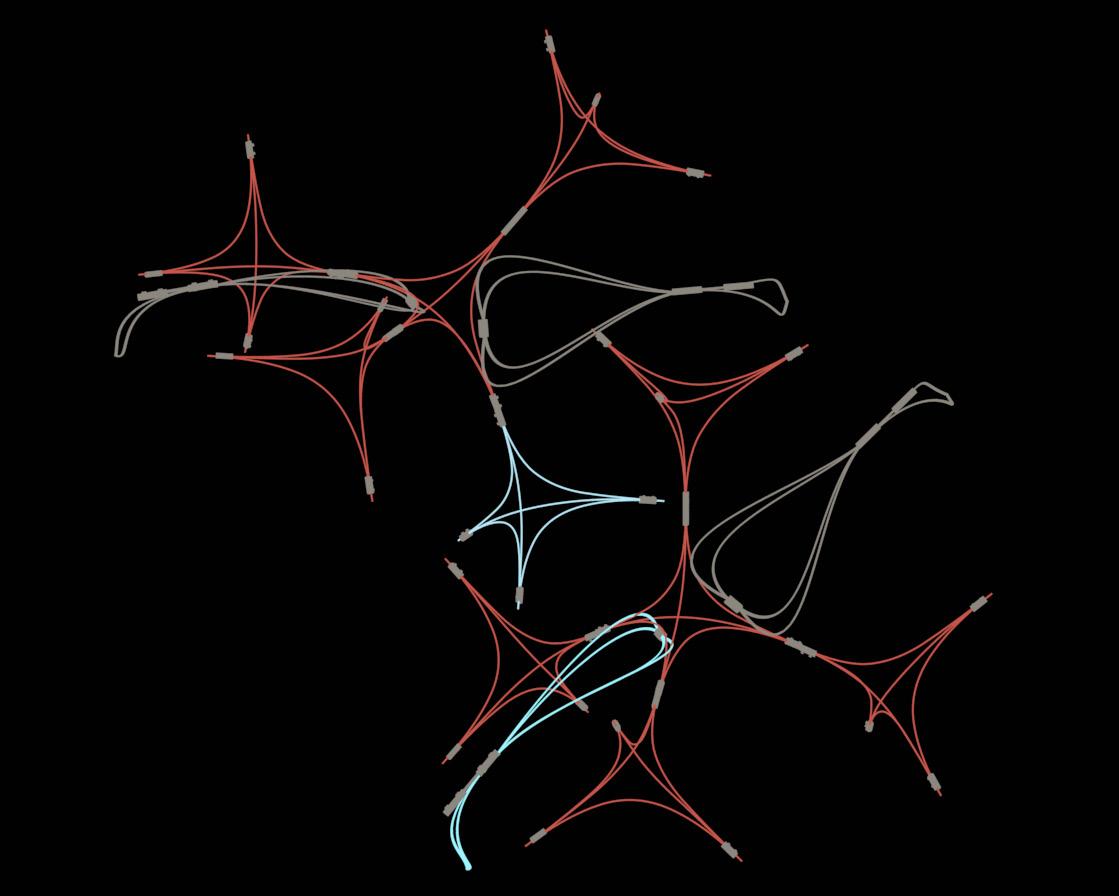
TheDigitalAGGREGATION26SimulationwithKangaroo,Ghimagesdepictstatesofthesystem during simulation time.
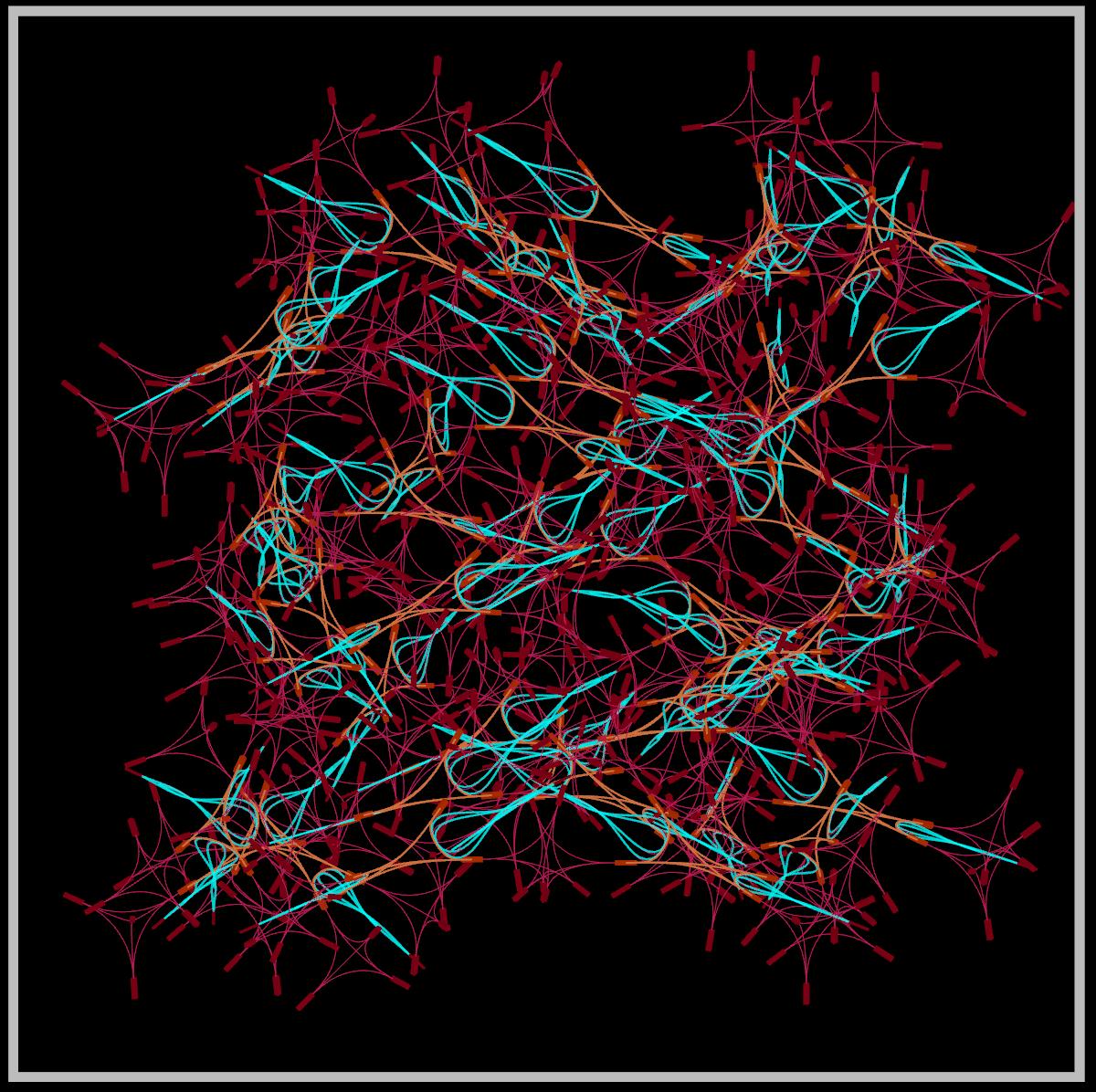
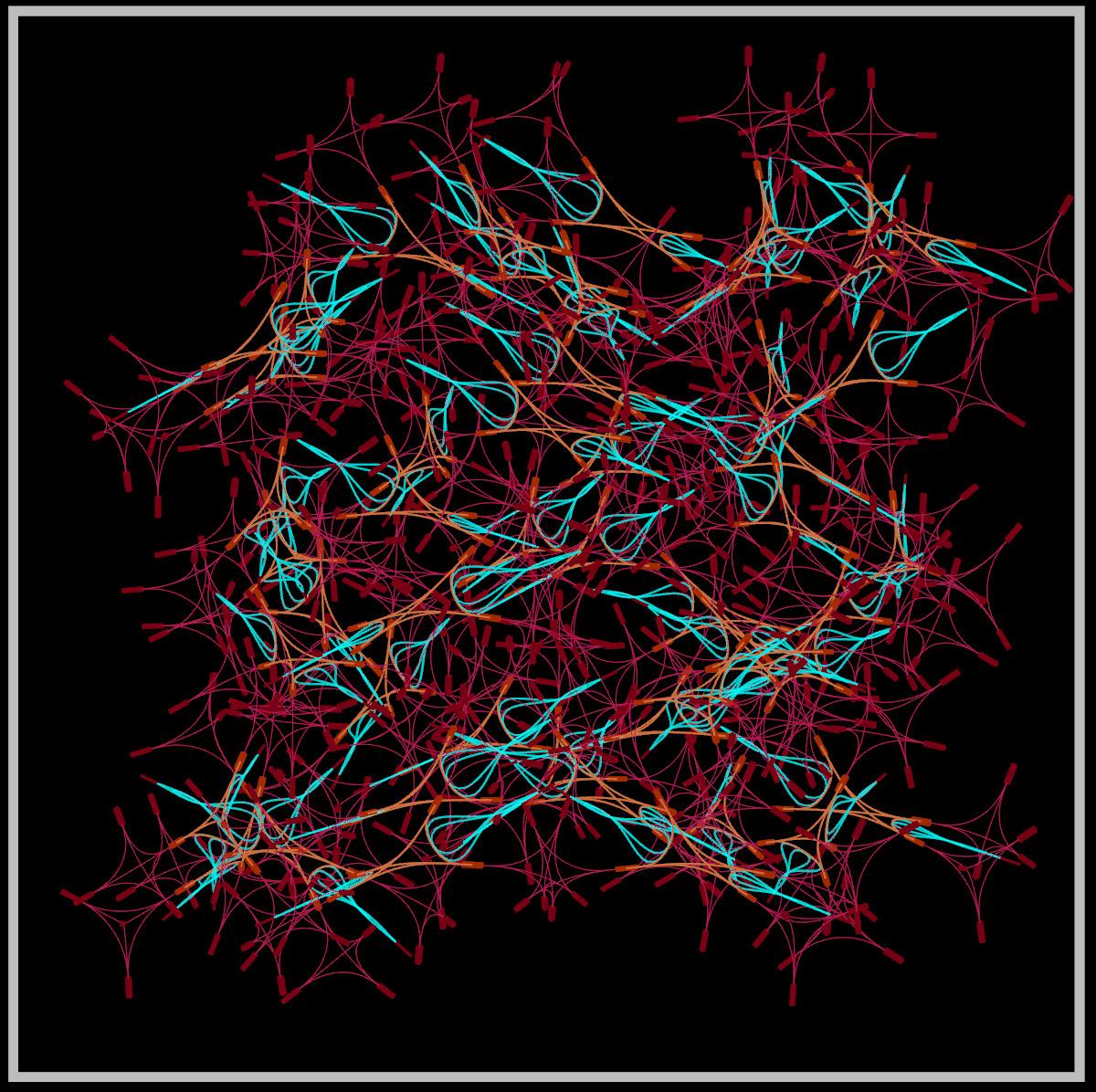
Self aggregation is
System is assumed
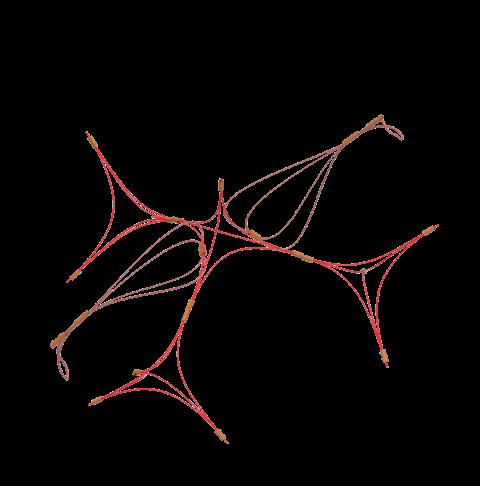
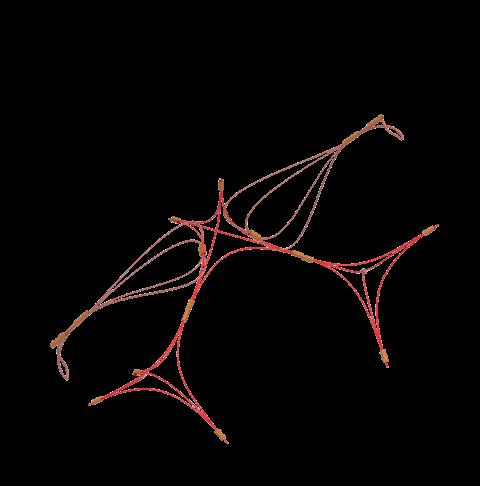
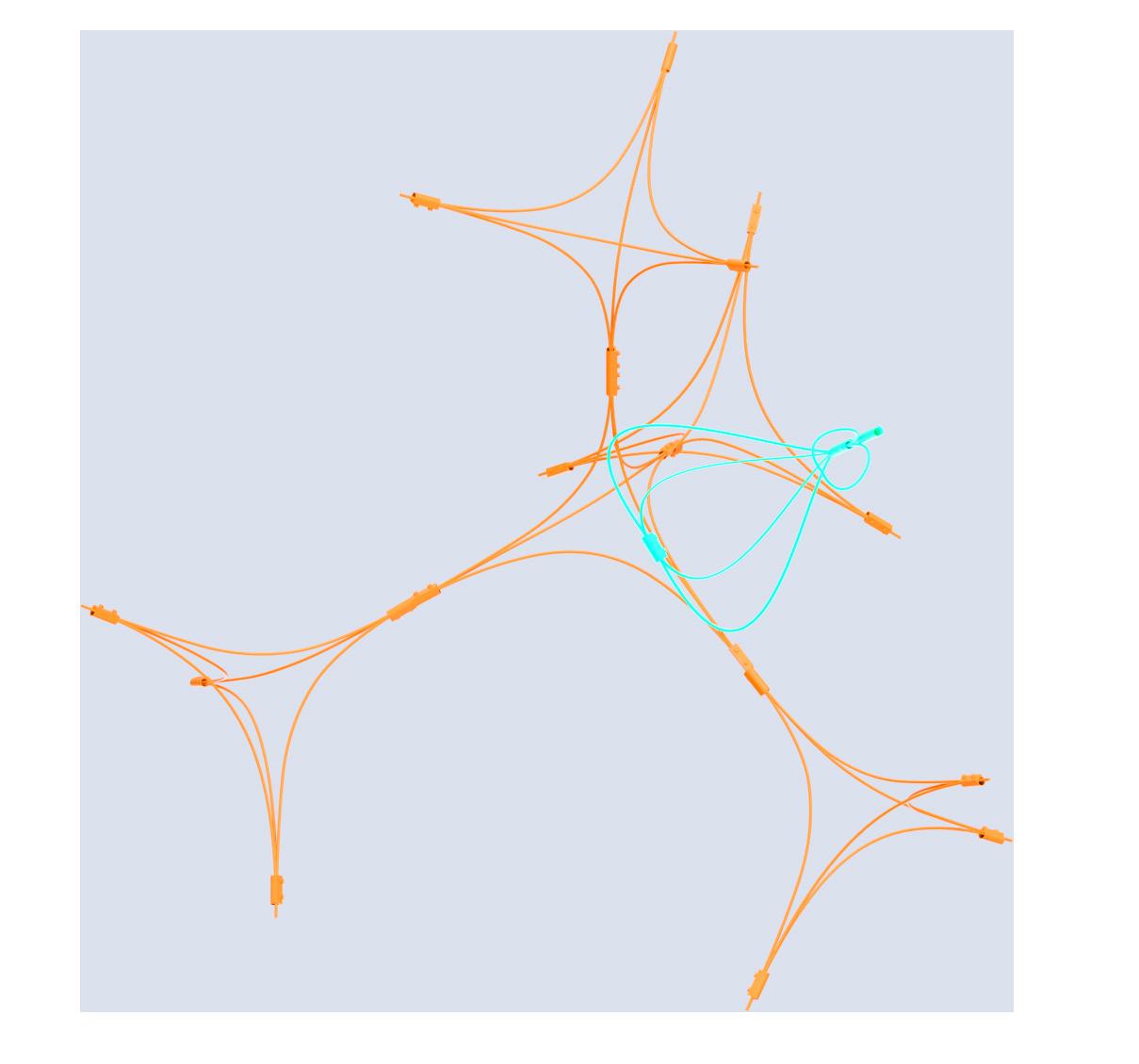
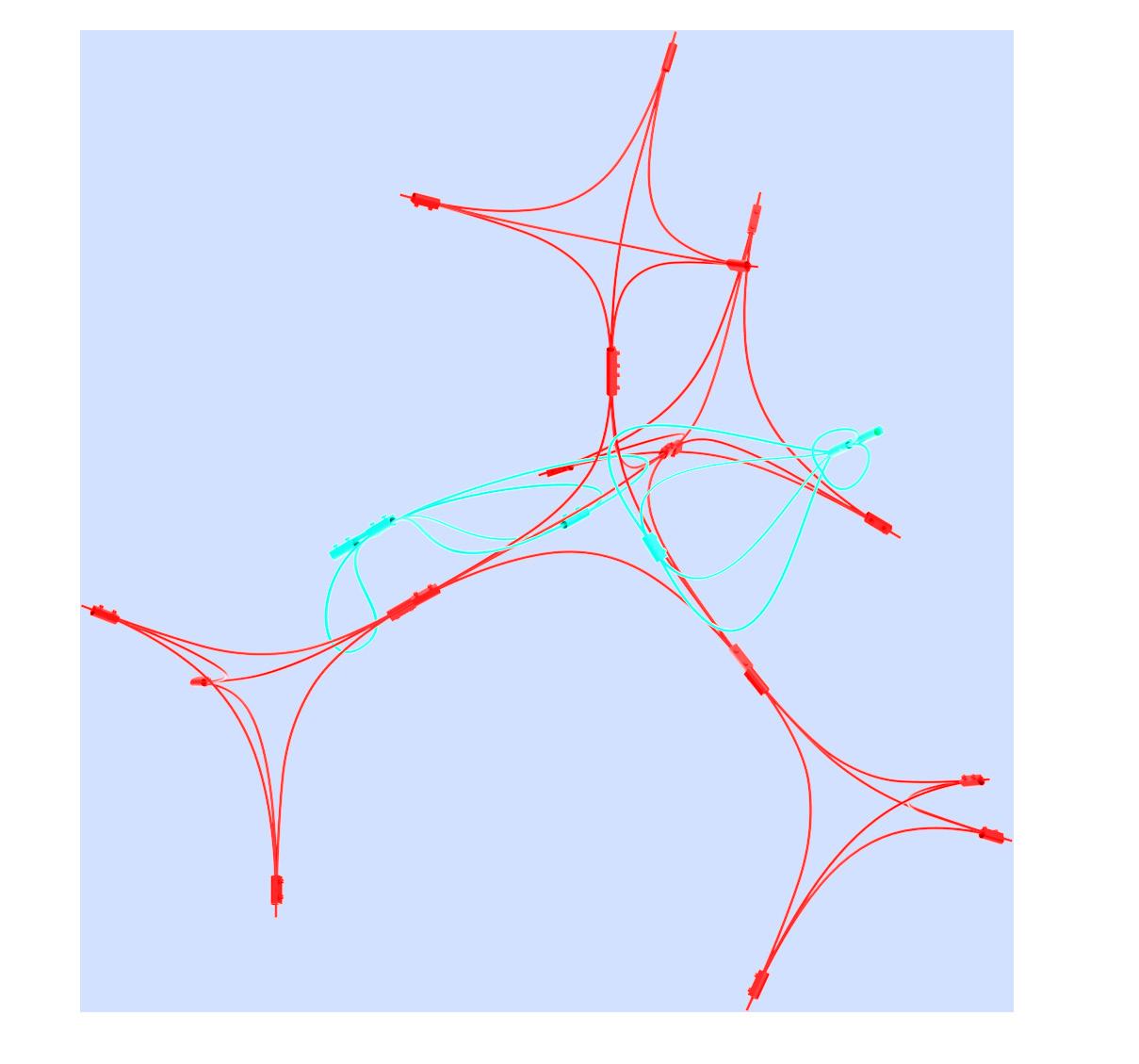
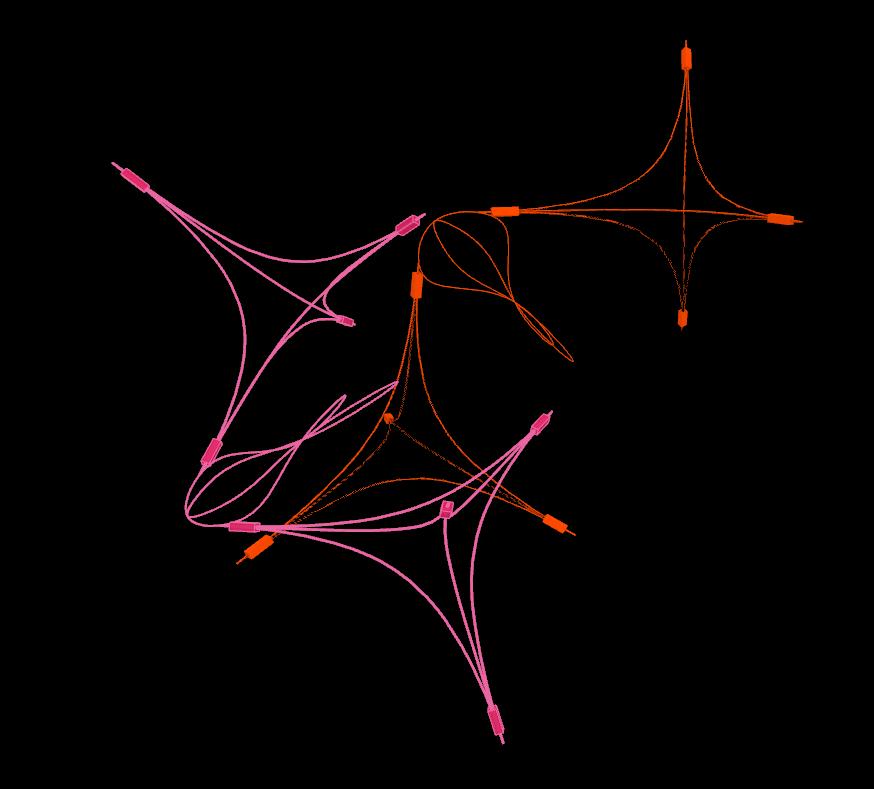
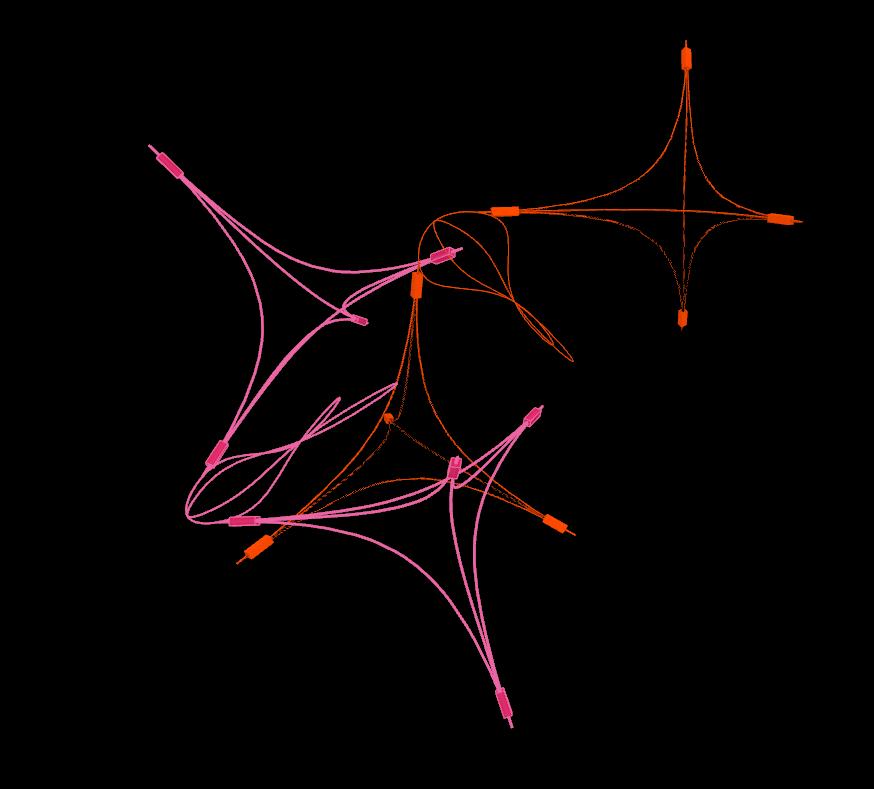
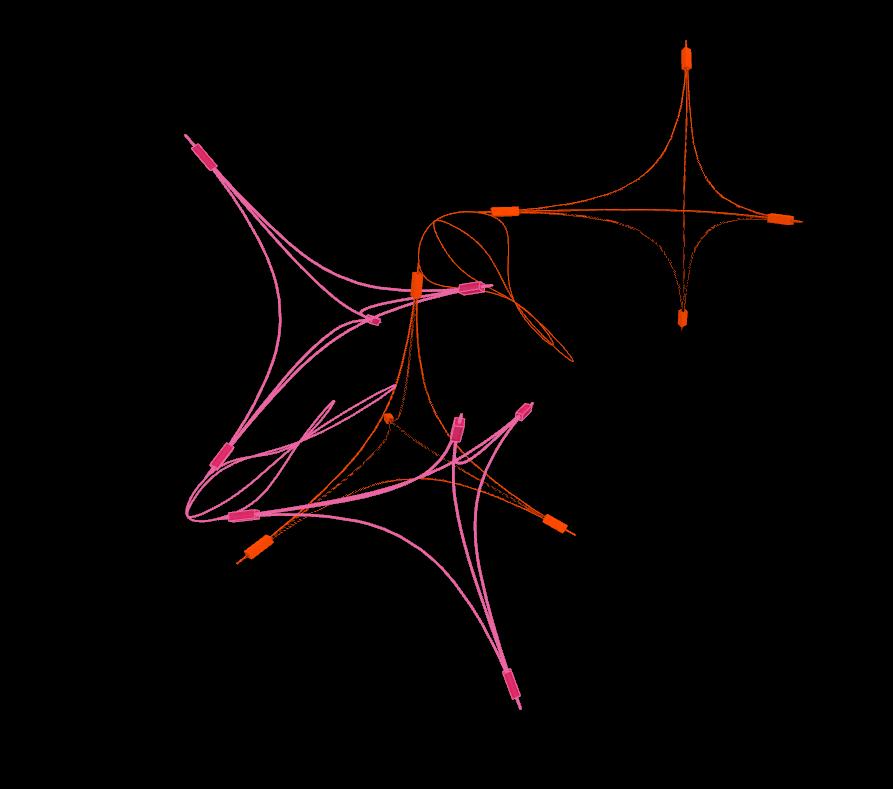
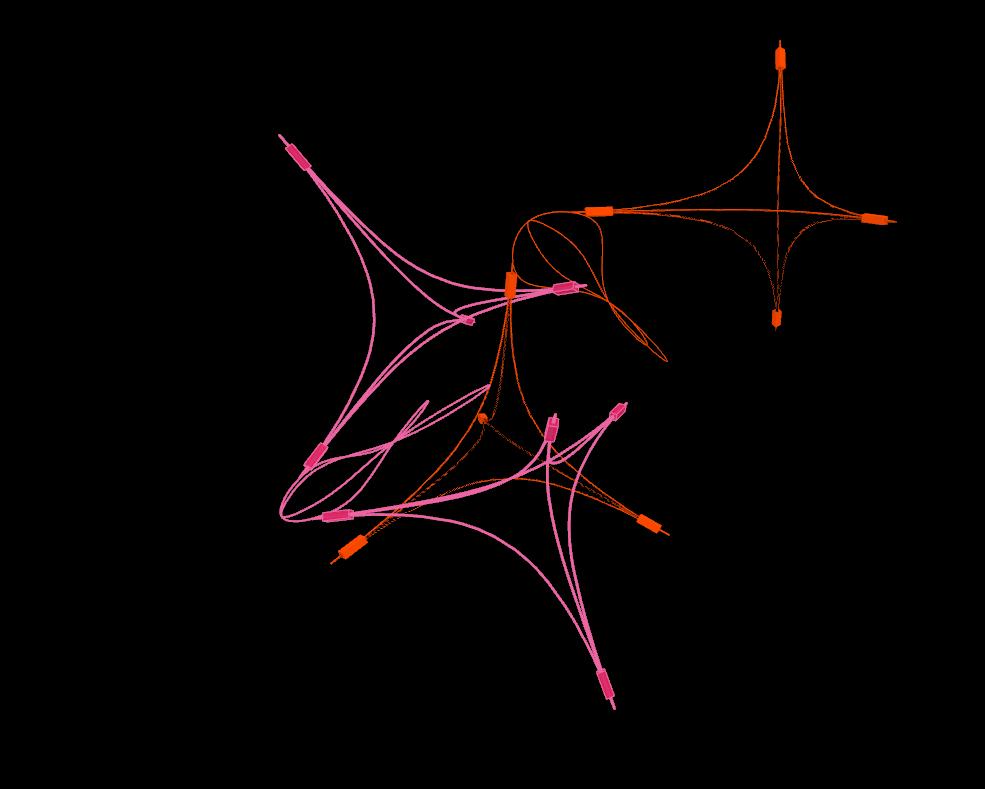
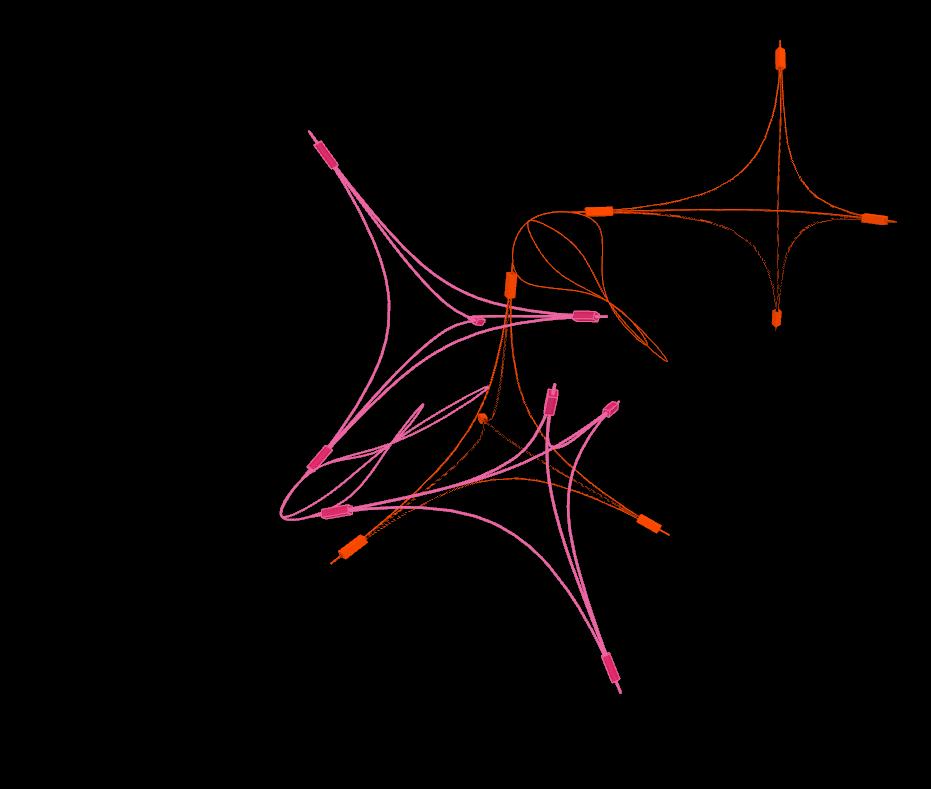
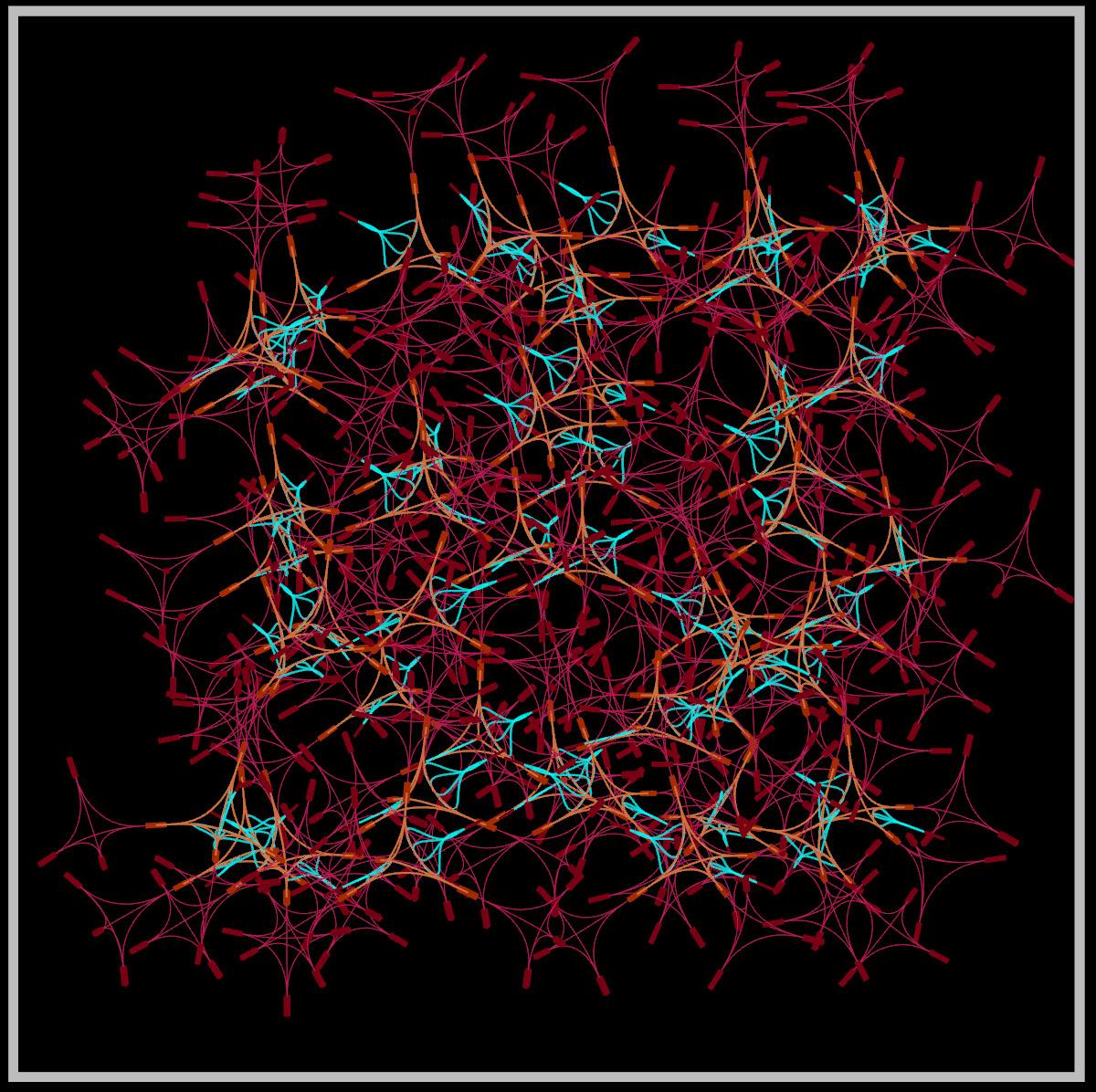
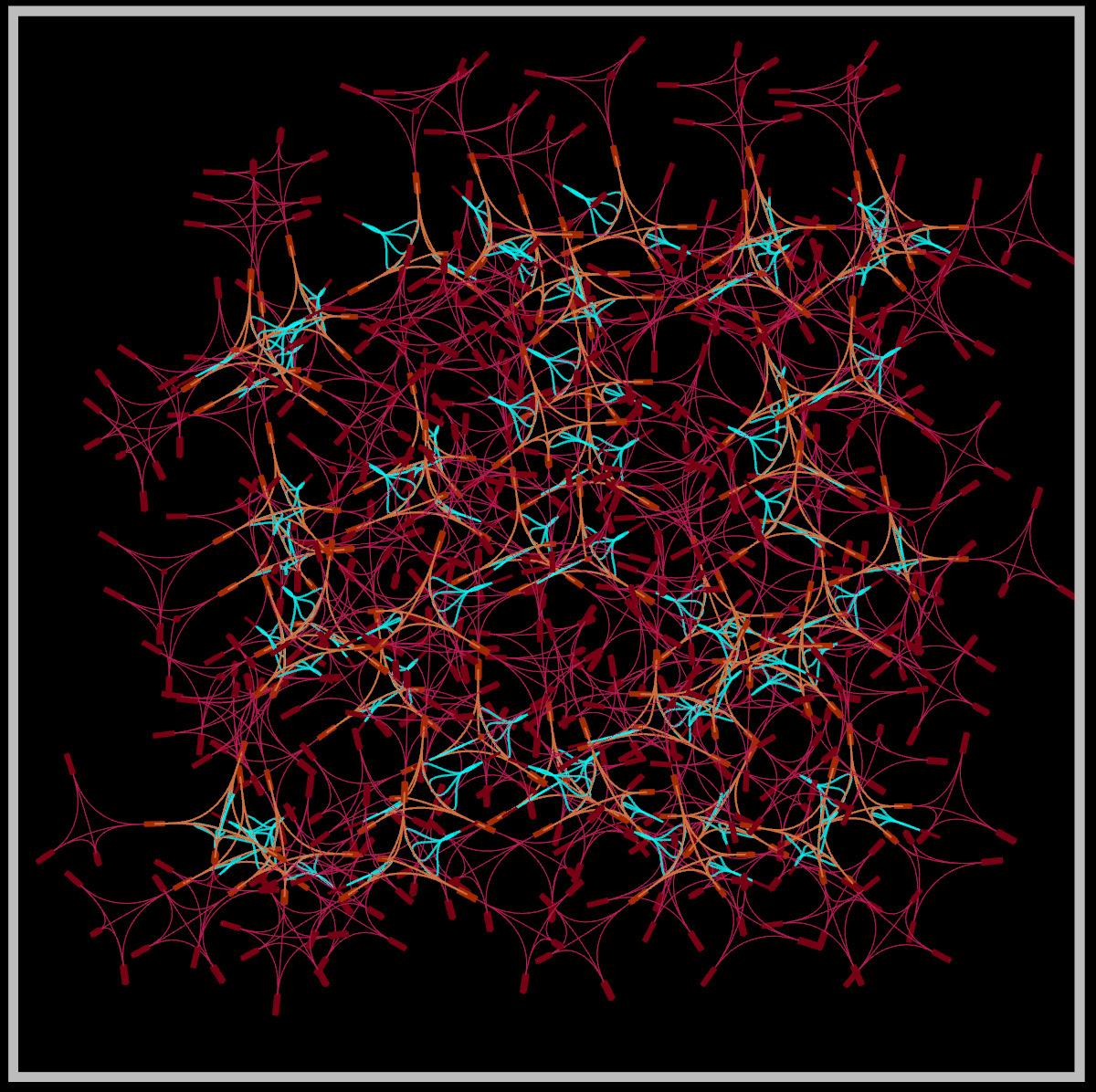
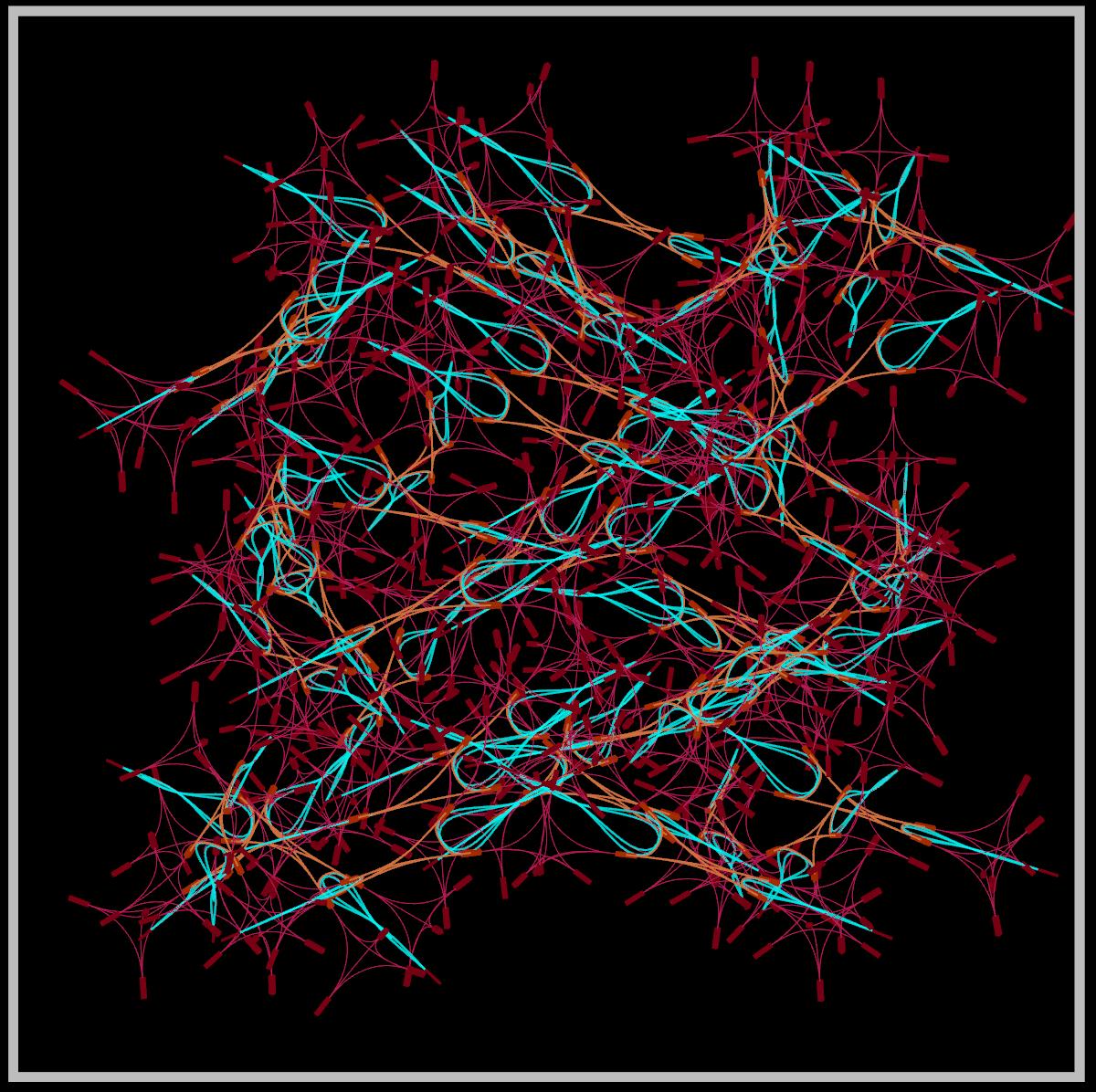
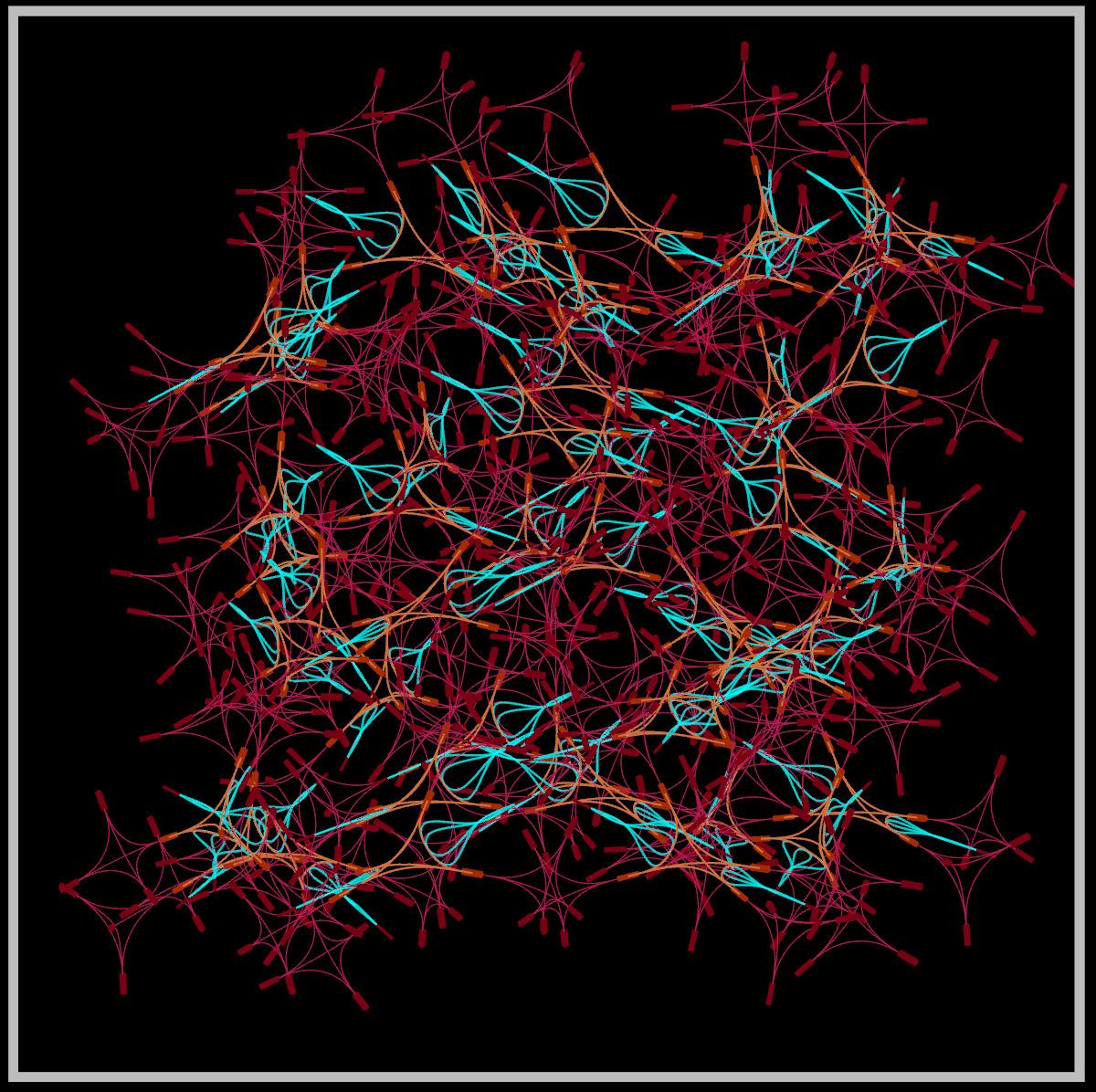
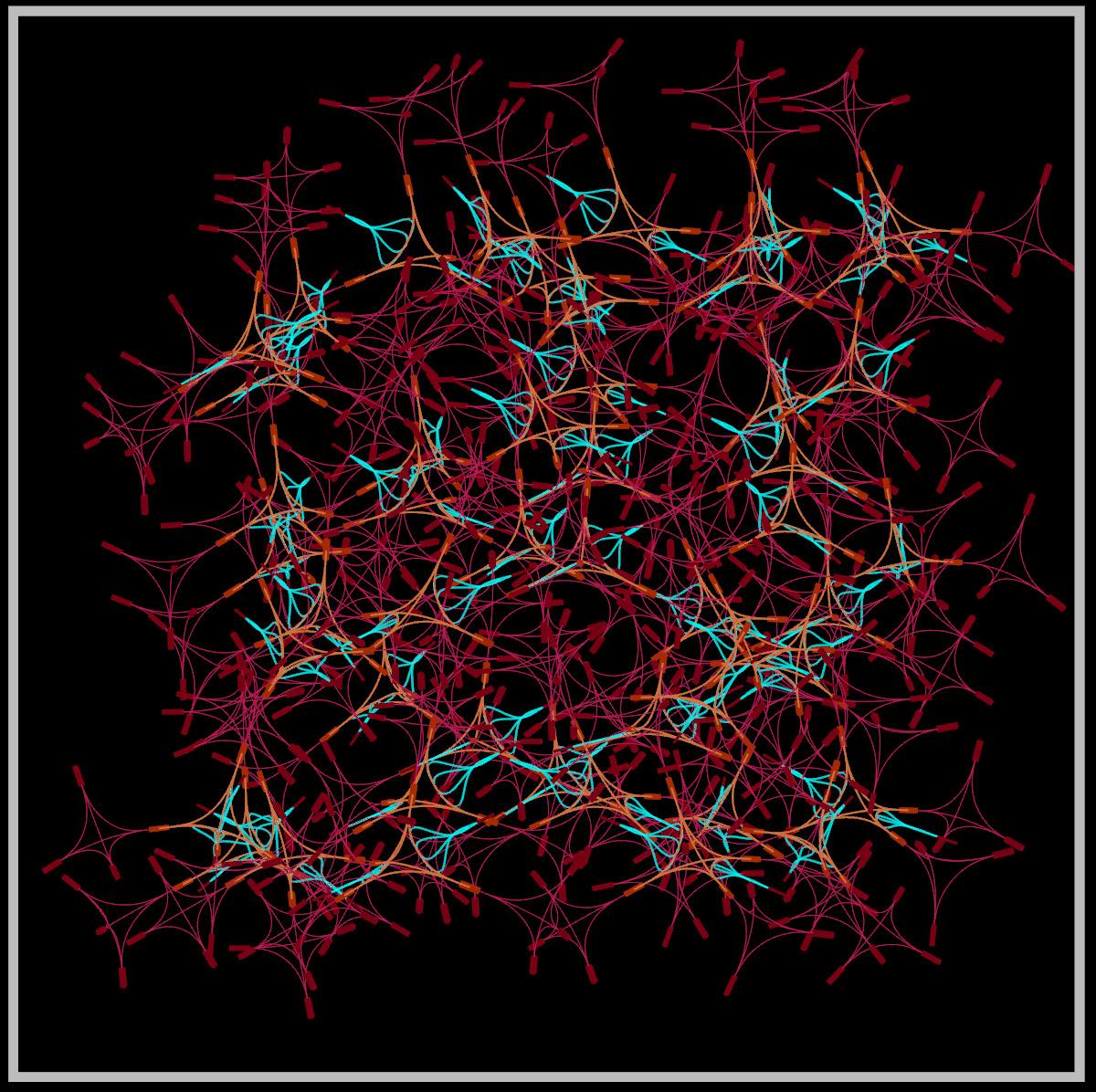
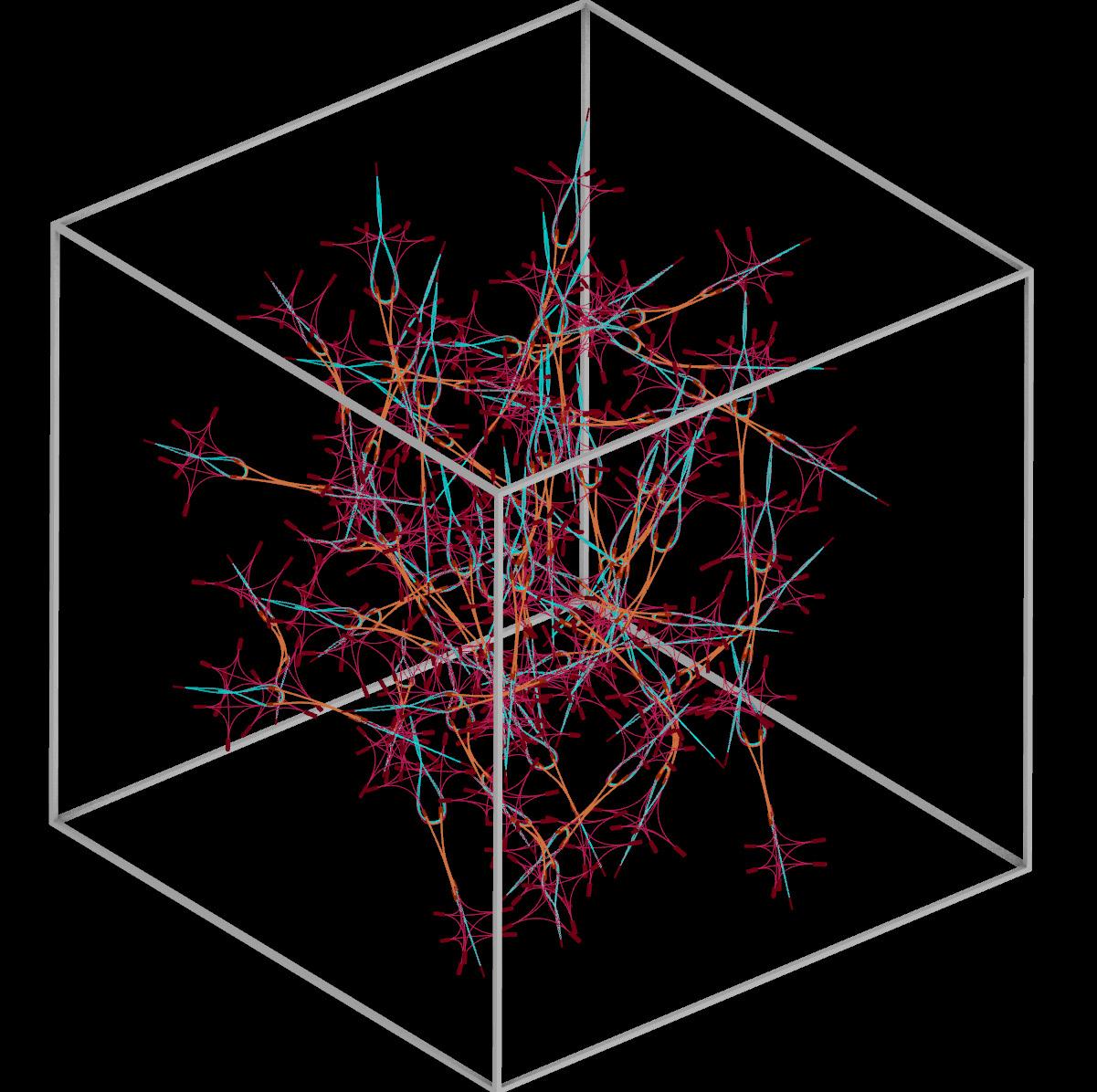
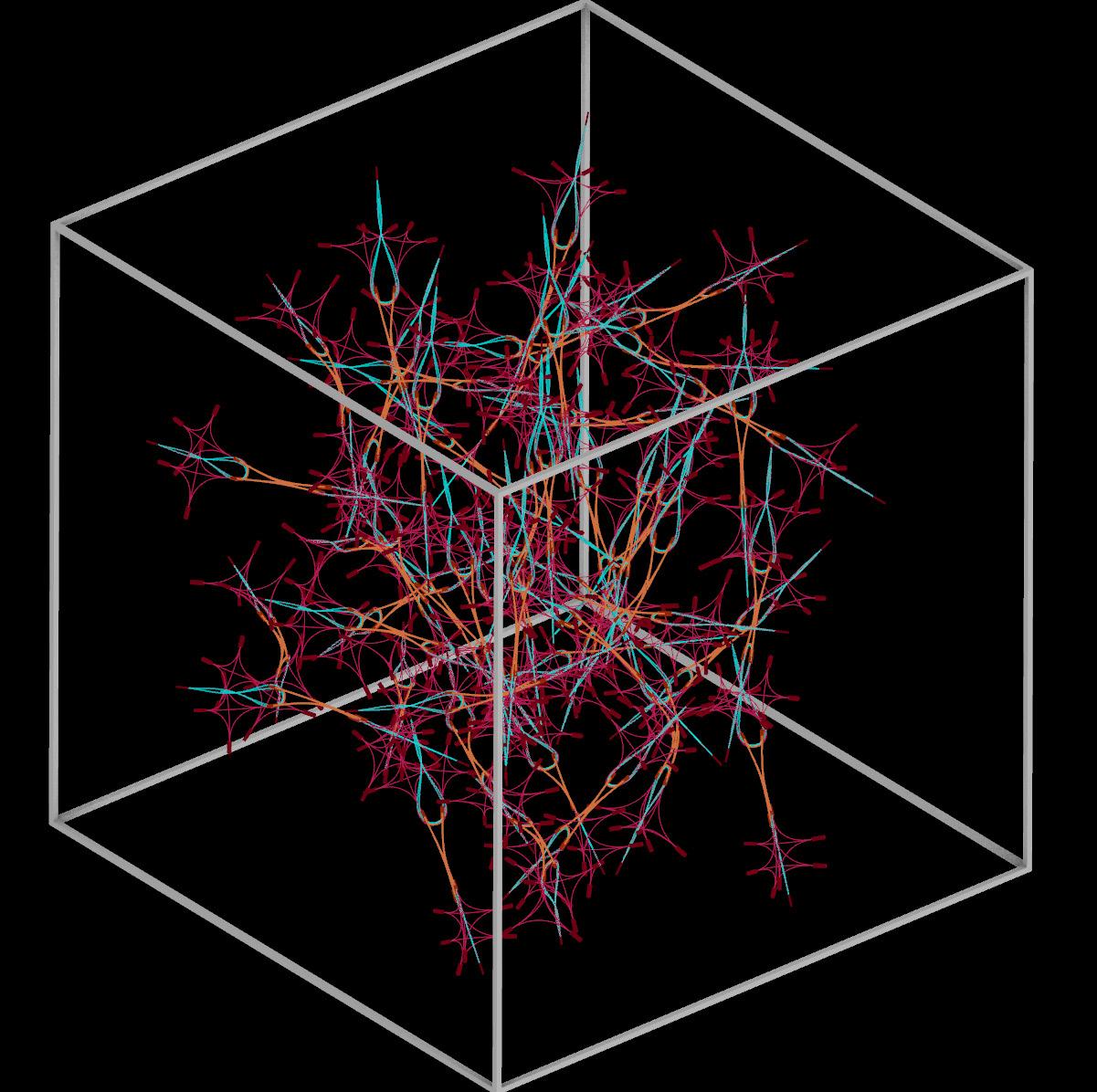
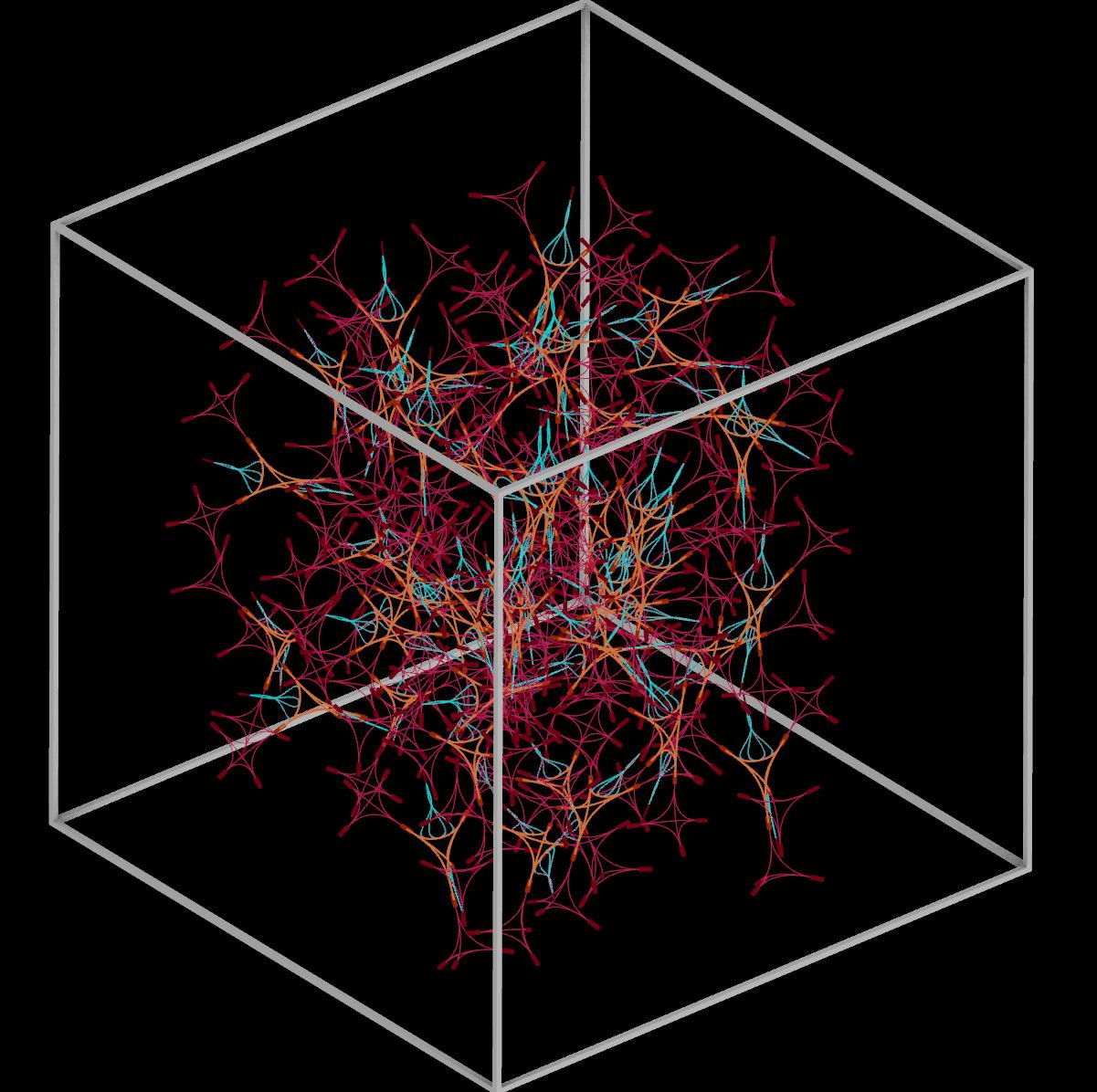
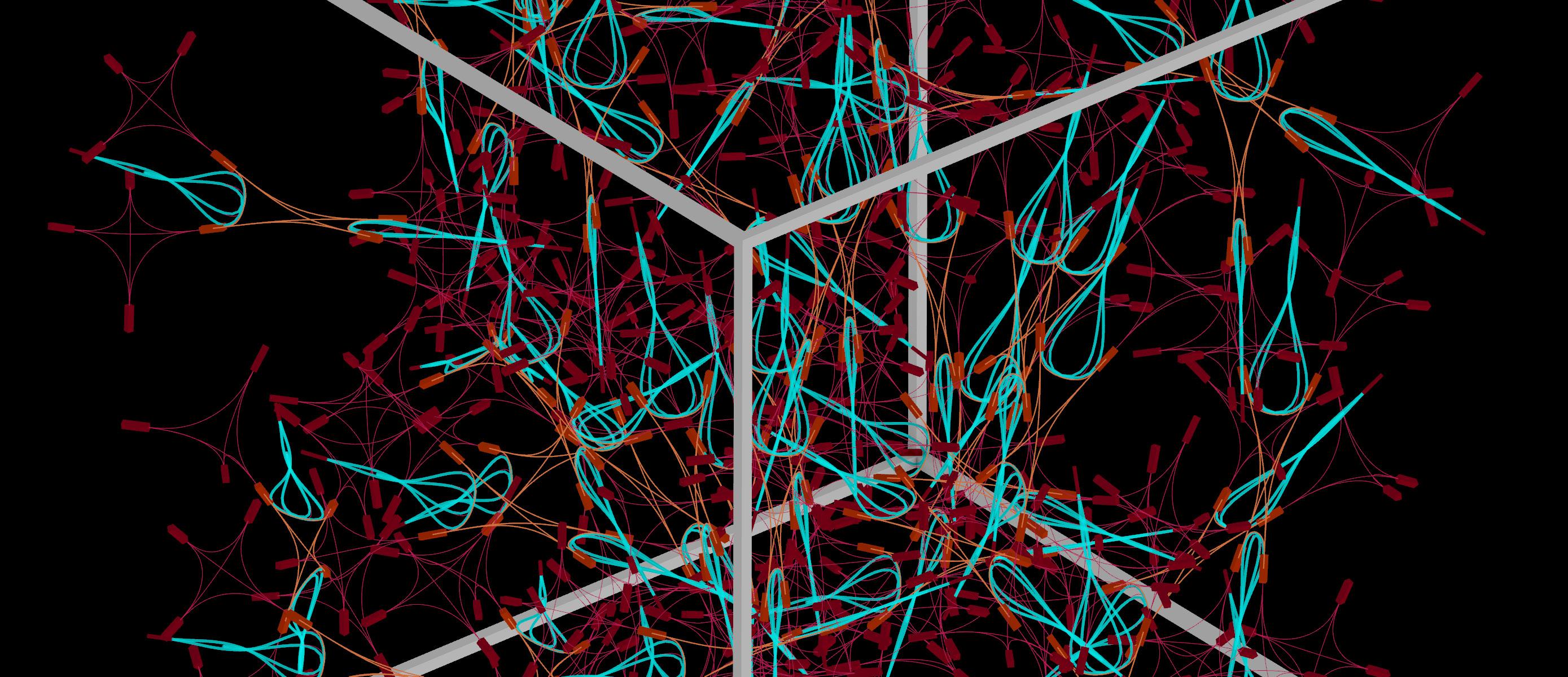
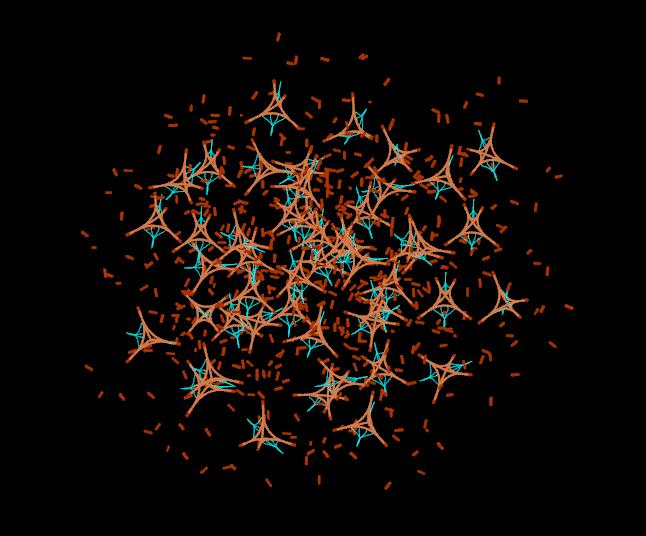
27 State 3 @ 30% Slider Pull 80% Rest, Relaxed Density State 8 @ 80% Slider Pull 30% Rest, Clarity in Void Formations State 4 @ 40% Slider Pull 70% Rest, Relaxed Density State 9 @ 90% Slider Pull 20% Rest, Clarity in Void Formations State 5 @ 50% Slider Pull 60% Rest, Relaxed Density State 10 @ 100% Slider Pull 10% Rest, Max. Tension, Linear-like Clusters with Voids
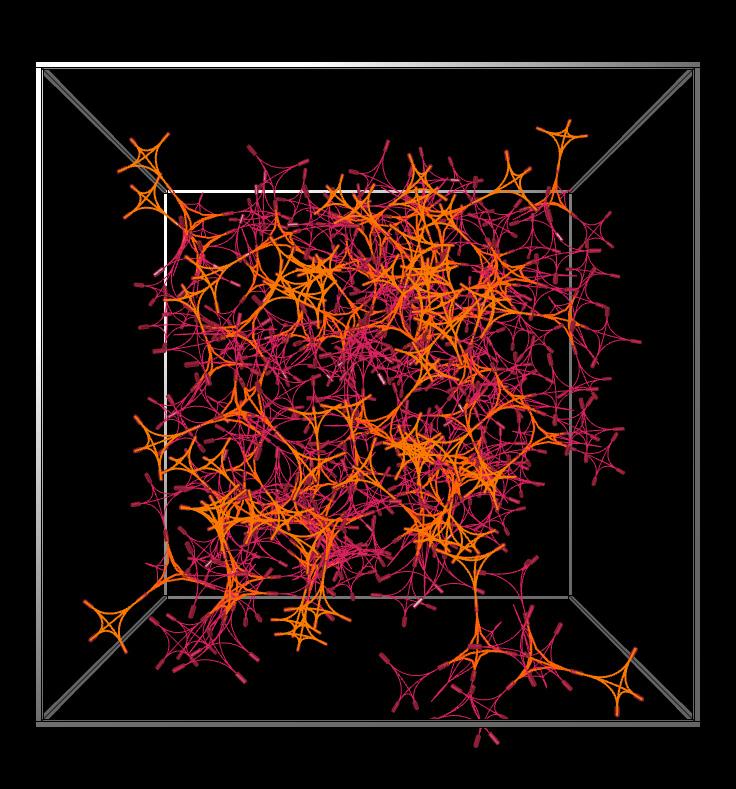
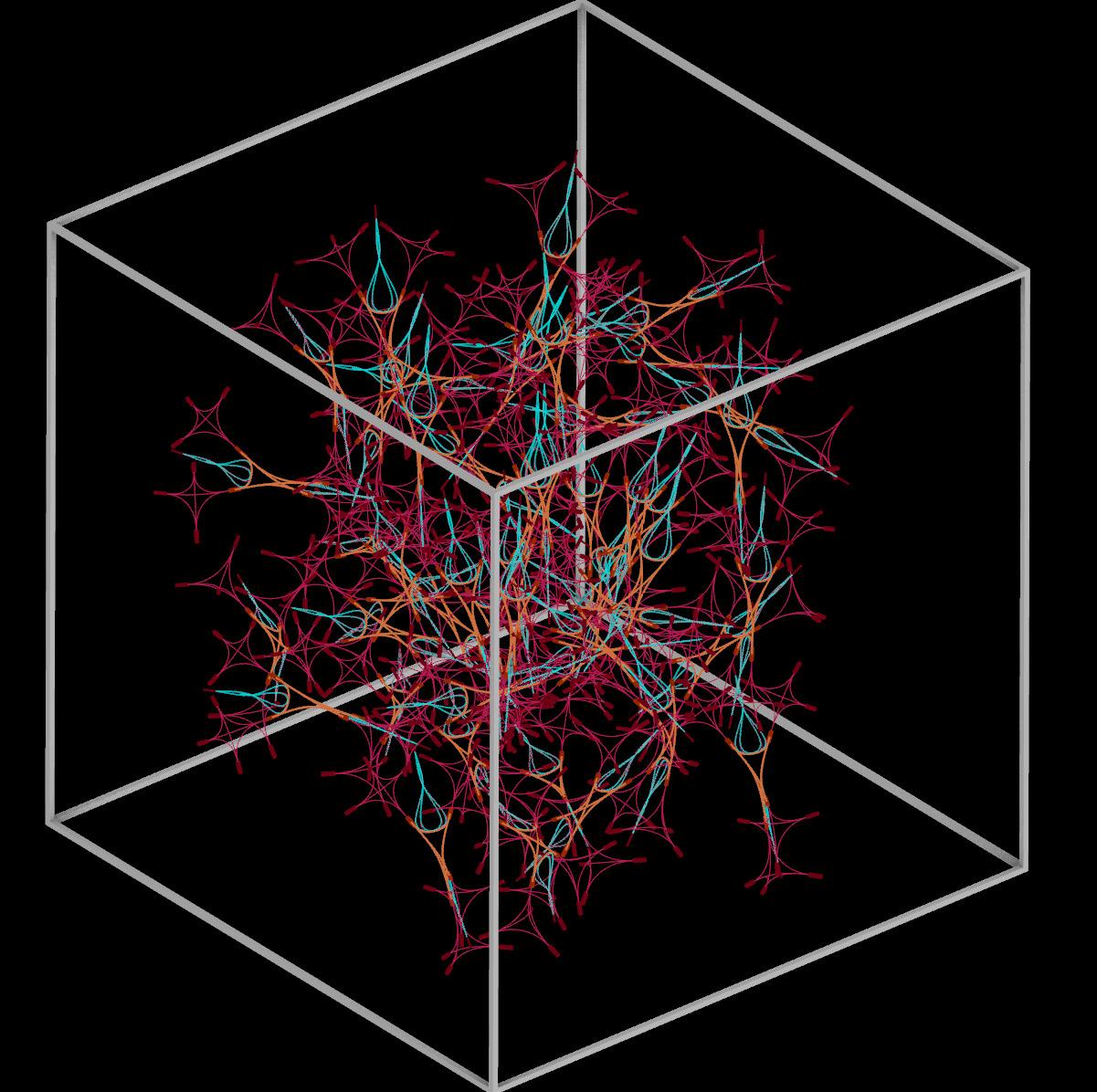
In Isometric
the
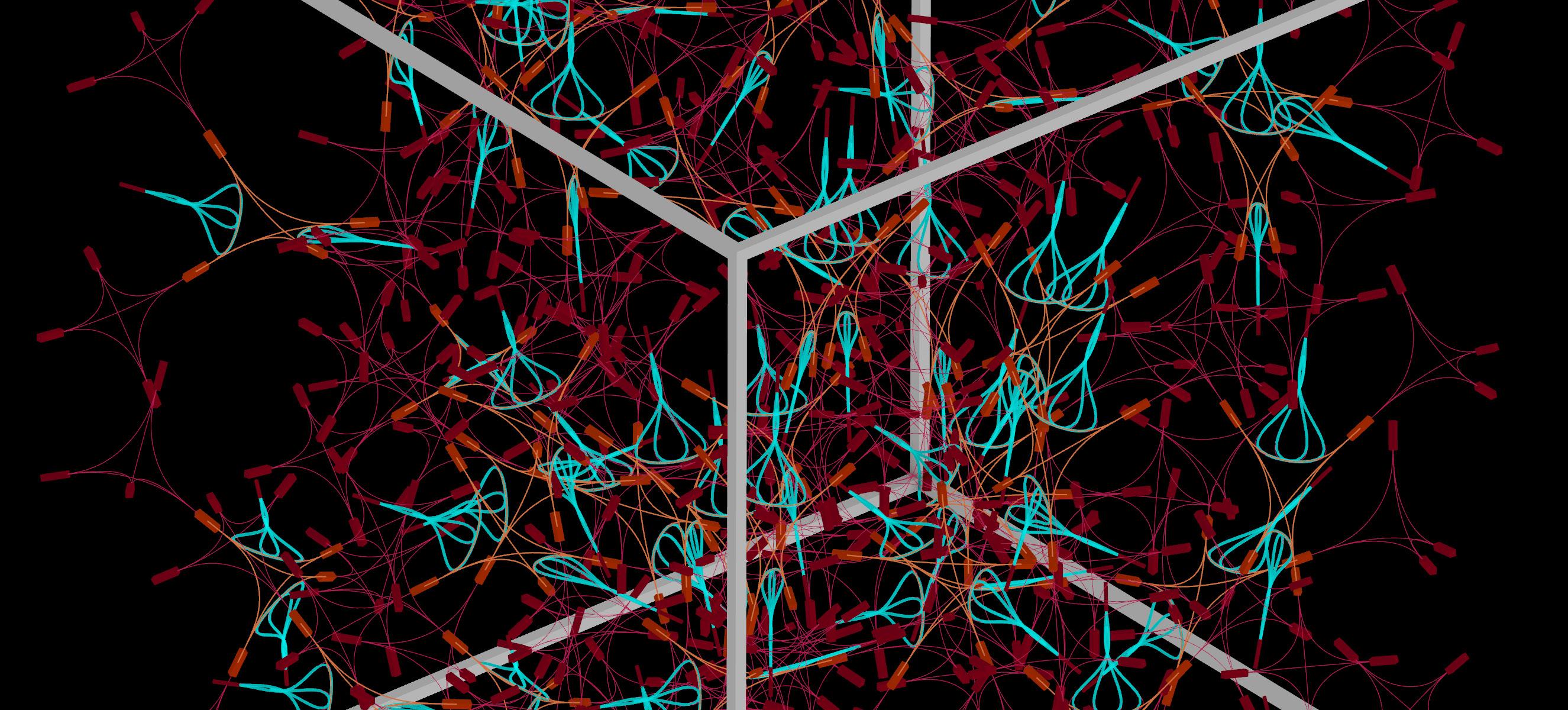
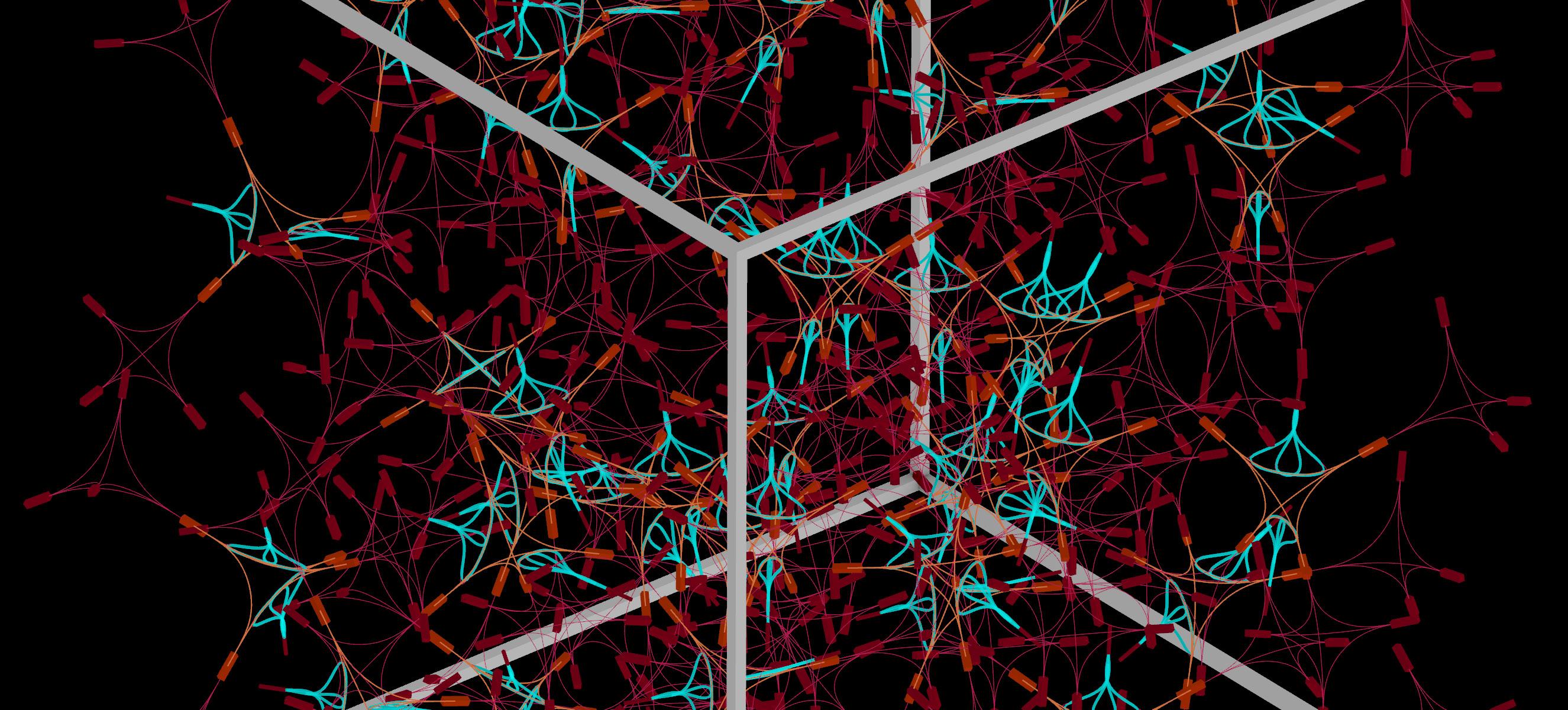
view, the entire system morphology transforms from completely open silders, relaxed cloud, to completely closed sliders, densified cloud, more linear like clusters within system with voids exposed in between, towards the simulation end. There are numerous permutations of the system form, from no voids to many voids, which is determined by the user interaction with the aggregate - by how much and how many of the sliders are being pulled, at a time or simulataneously. State 1 @ 10% Slider Pull 100% Rest, Relaxed Density State 6 @ 60% Slider Pull 50% Rest, Emergence of In b/w VoidsRedOrangeBlue : Slider Components : Central Pyramids in ‘5-Pyramid’ Structure : 4 Corner Pyramids in ‘5-Pyramid’ Structure State 2 @ 20% Slider Pull 90% Rest, Relaxed Density State 7 @ 70% Slider Pull 40% Rest, Emergence of In b/w Voids State 1 @ 10% Slider Pull State 10 @ 100% Slider Pull
TheDigitalAGGREGATION28SimulationwithKangaroo,Ghimagesdepictstatesofthesystem during simulation time.

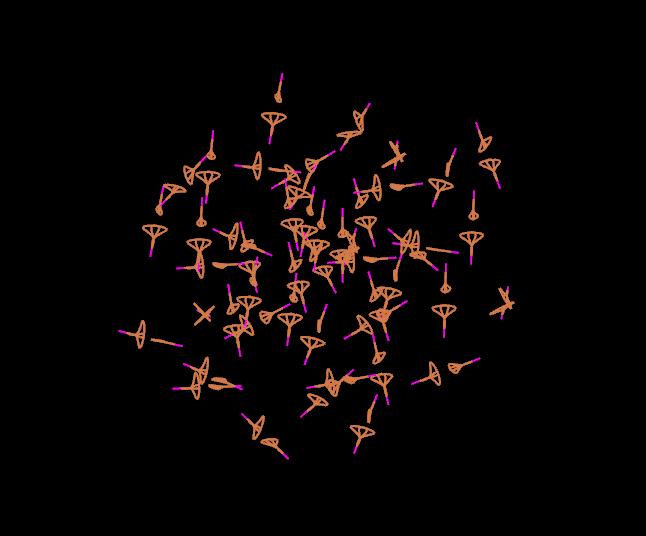
29 State 3 @ 30% Slider Pull 80% Rest, Relaxed Density State 8 @ 80% Slider Pull 30% Rest, Clarity in Void Formations State 4 @ 40% Slider Pull 70% Rest, Relaxed Density State 9 @ 90% Slider Pull 20% Rest, Clarity in Void Formations State 5 @ 50% Slider Pull 60% Rest, Relaxed Density State 10 @ 100% Slider Pull 10% Rest, Max. Tension, Linear-like Clusters with Voids

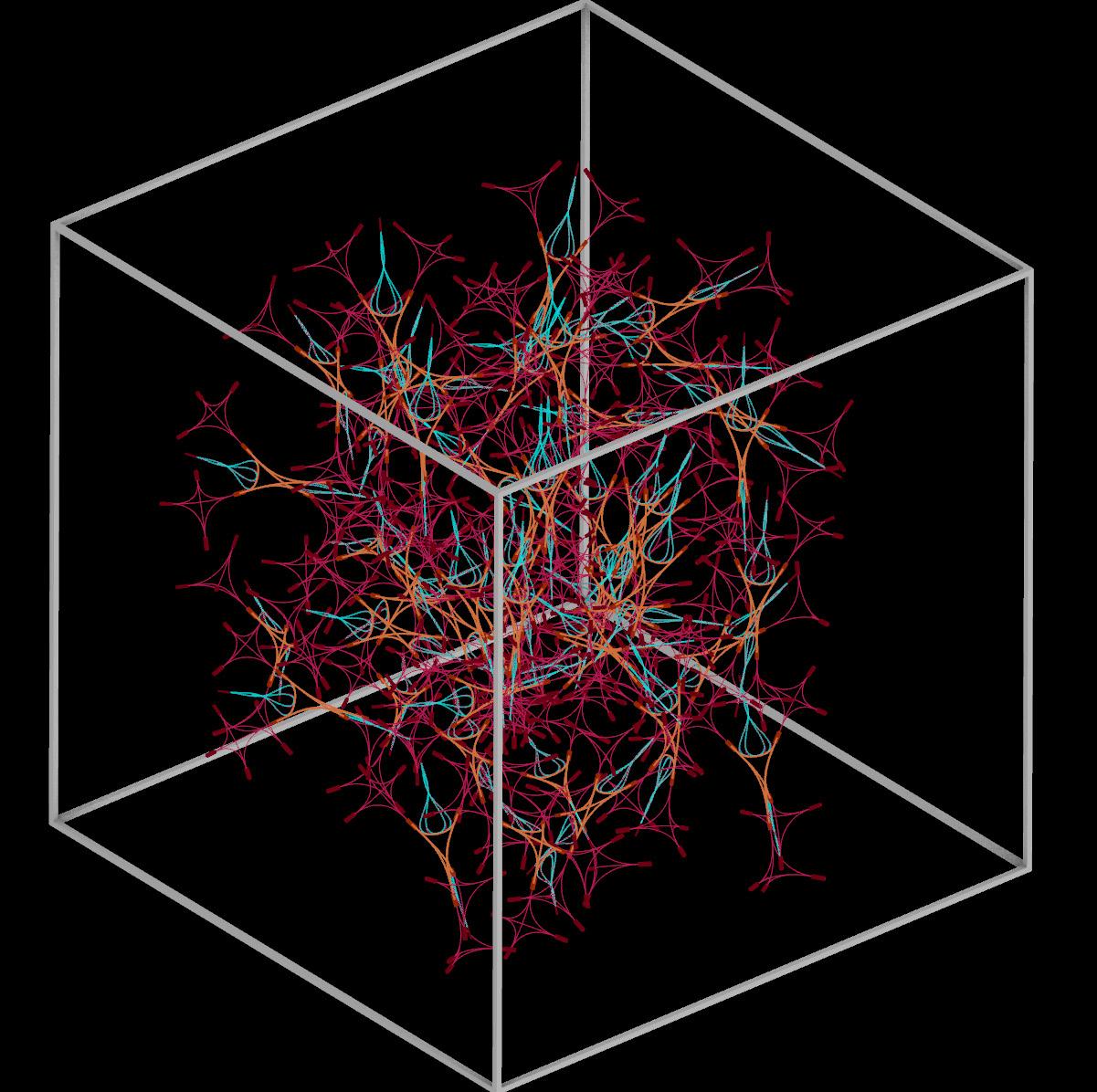
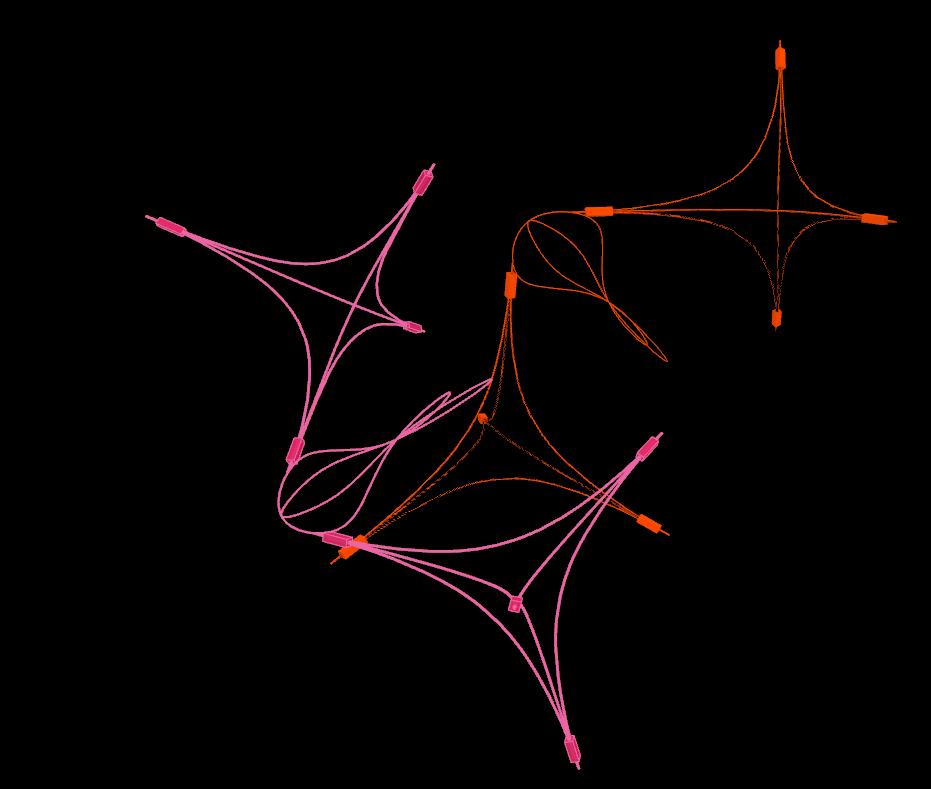
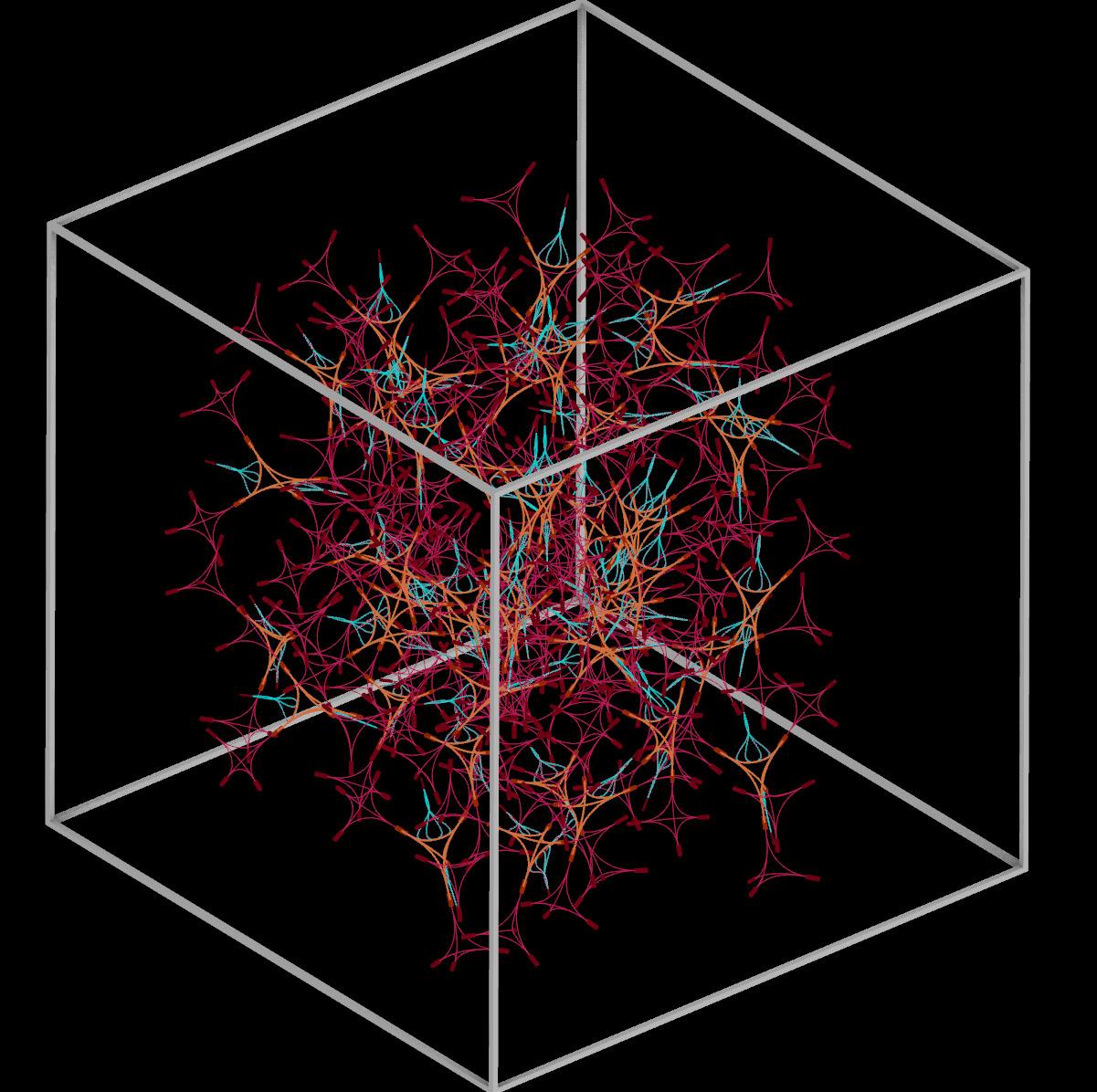
TransitionTransitionGravityFrameLoopFrameCollisionFrictionForceAGGREGATION30ParametersforStructureandStabilityHingeComponentPullHangA-OpenSlidersB-Semi-OpenSlider
Transition C - Semi-Closed Slider
Transition D - Closed Slider
Points in sphere cloud

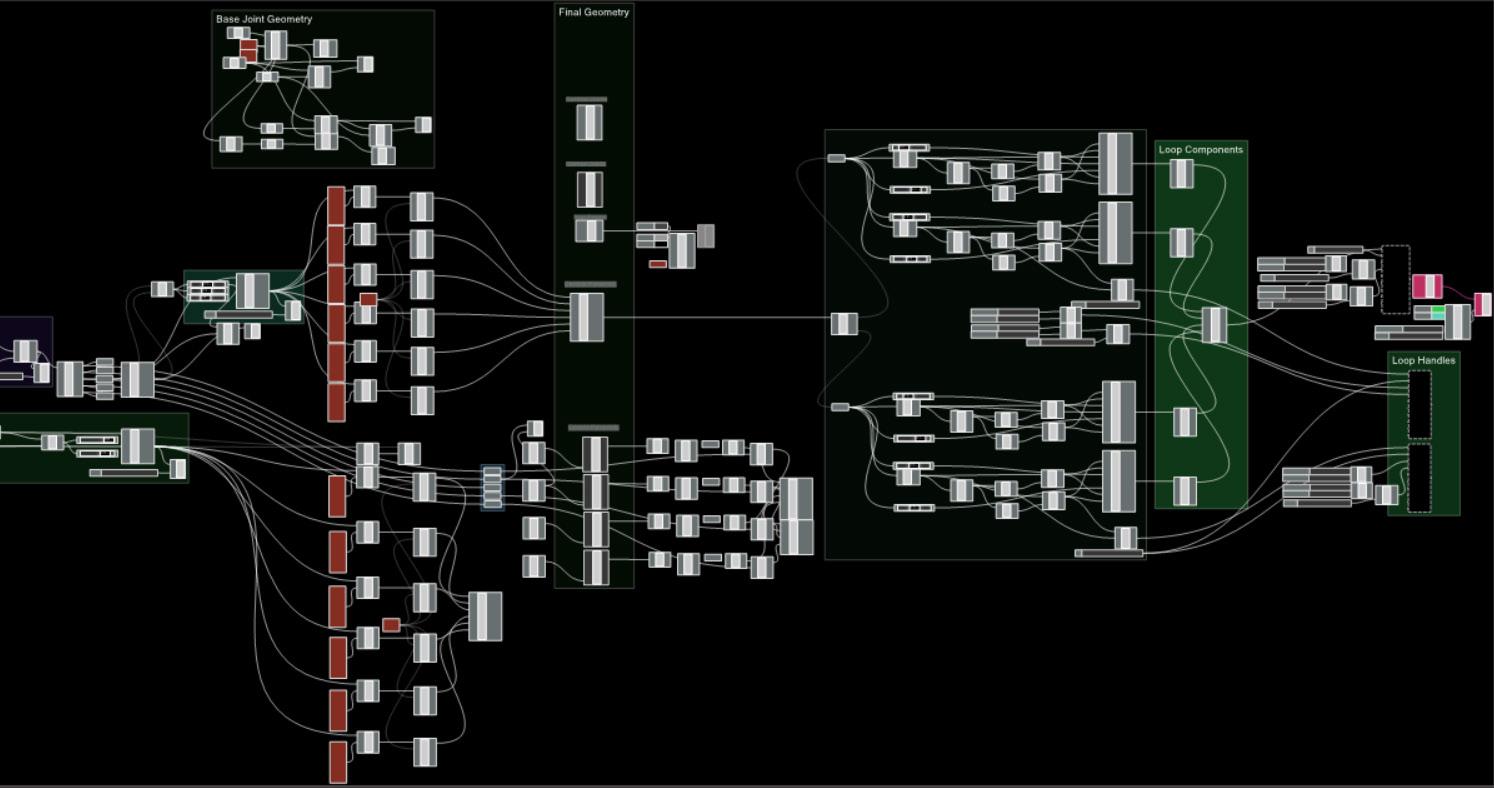
StructureGHAGGREGATION32ScriptIllustrationandcomponents
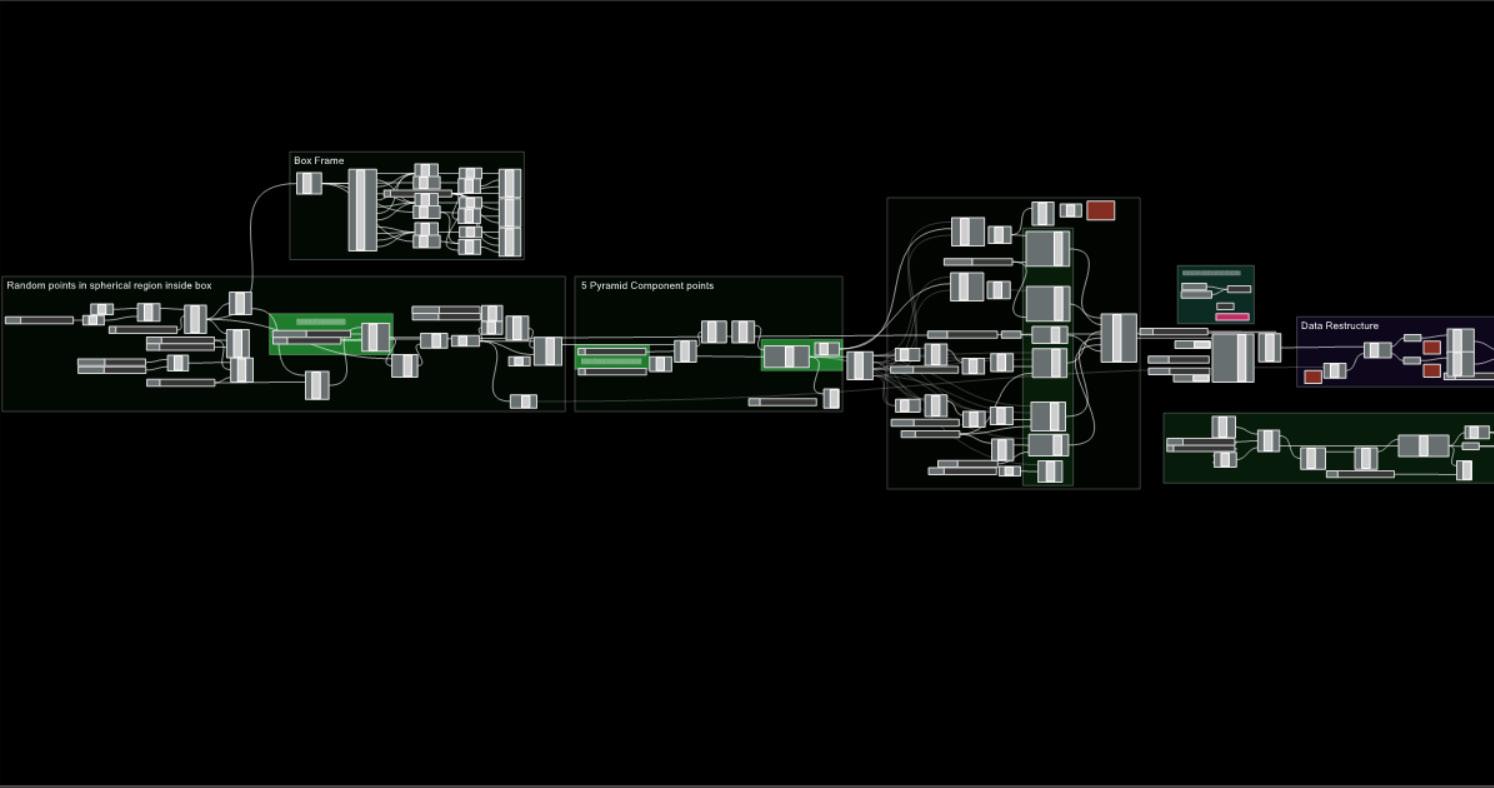
33 Central, Corner pyramids All Components Joints Sliders and Handles
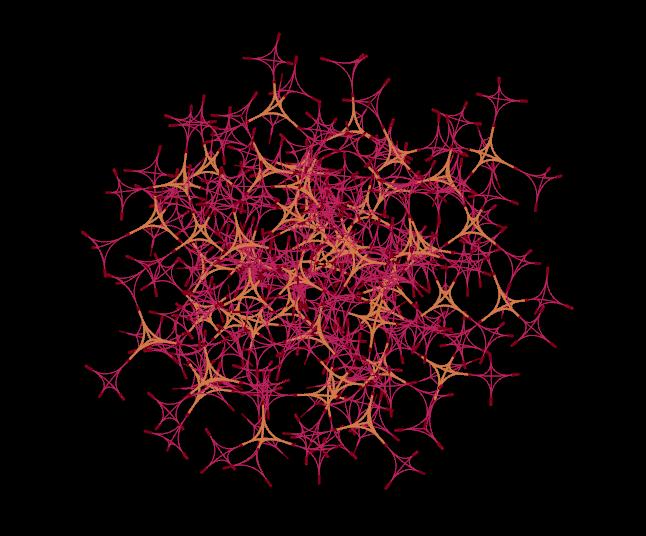
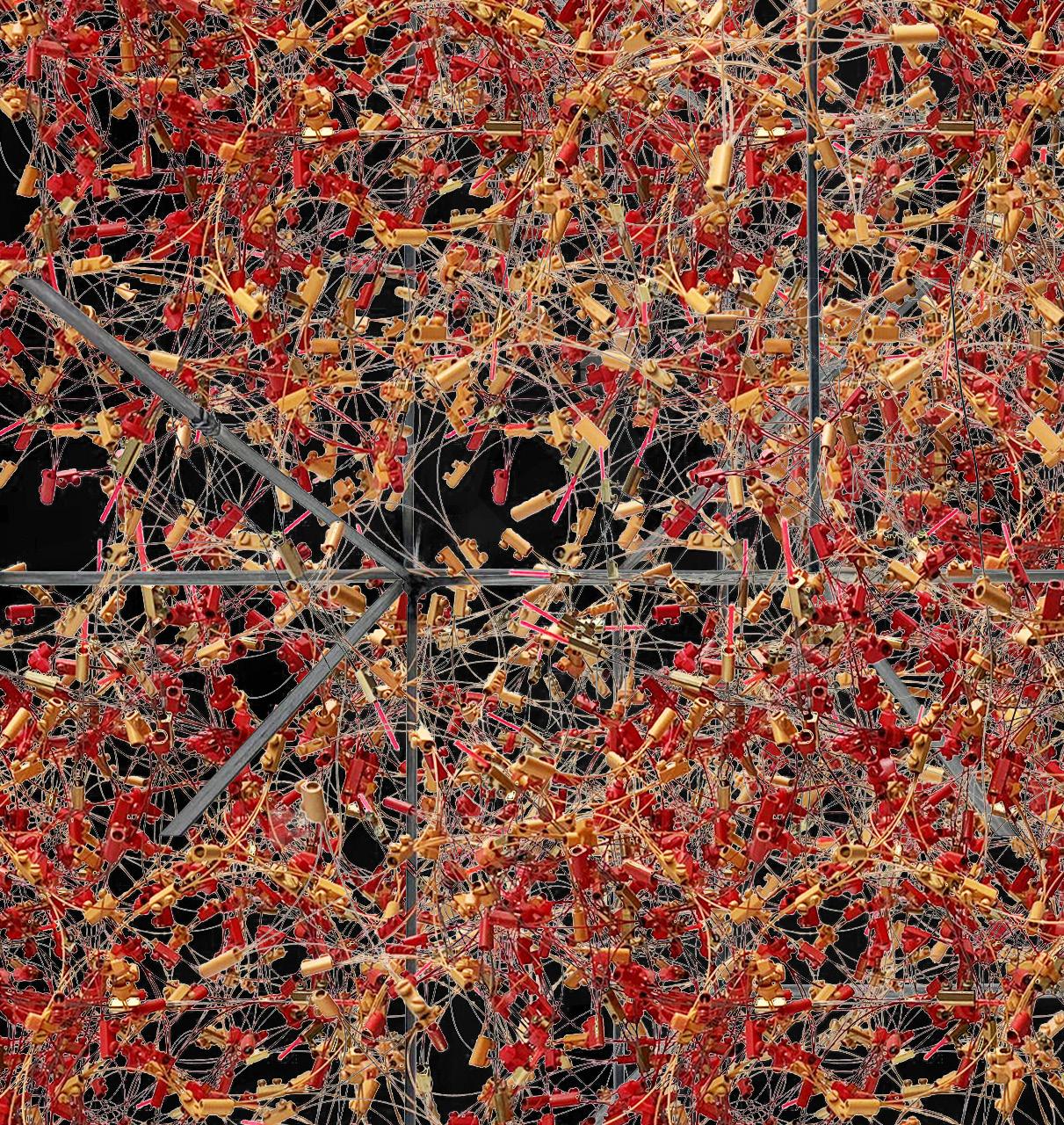
COMPONENTAGGREGATIONPHYSICAL34PARTS



PHYSICAL CLOUD
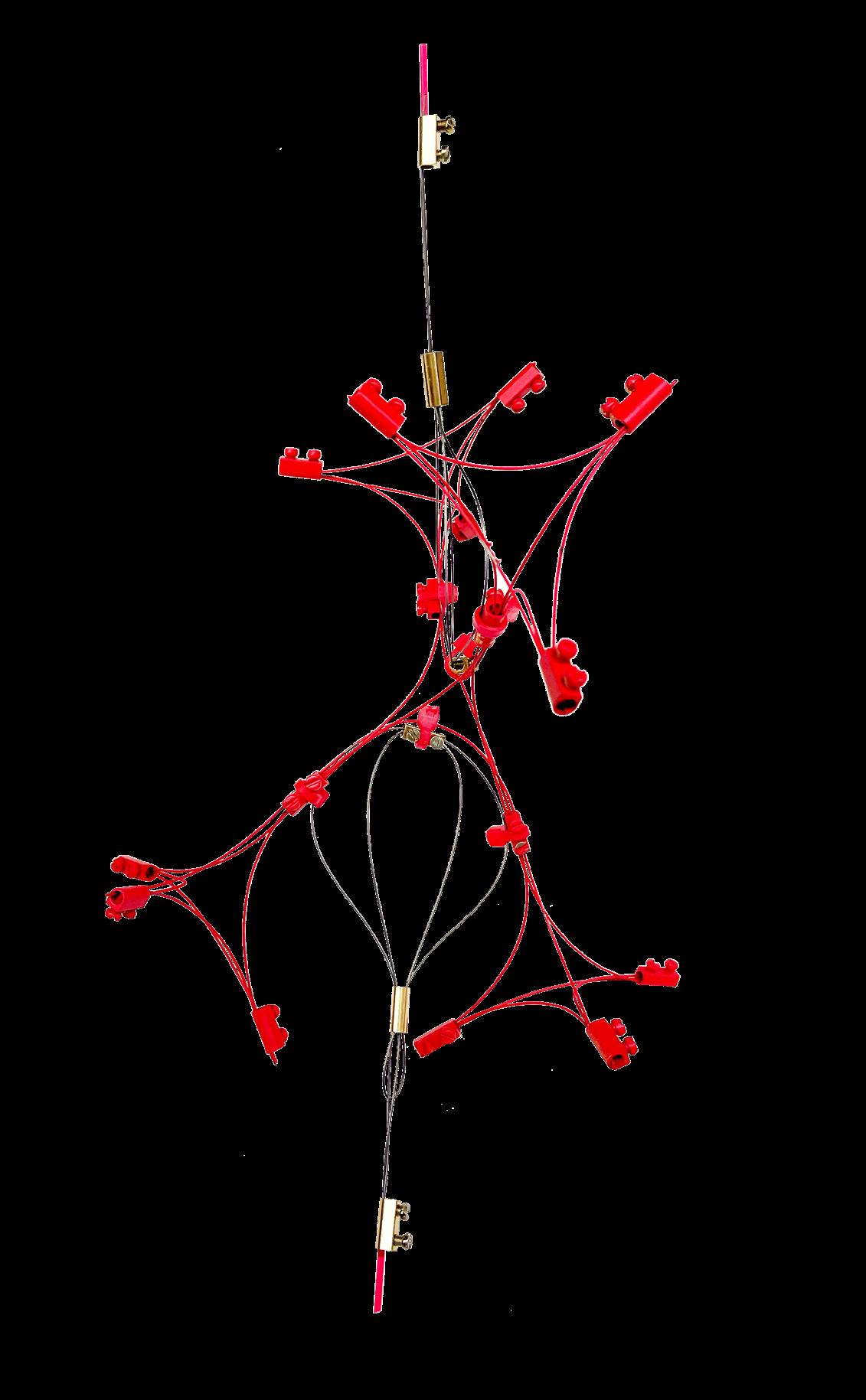
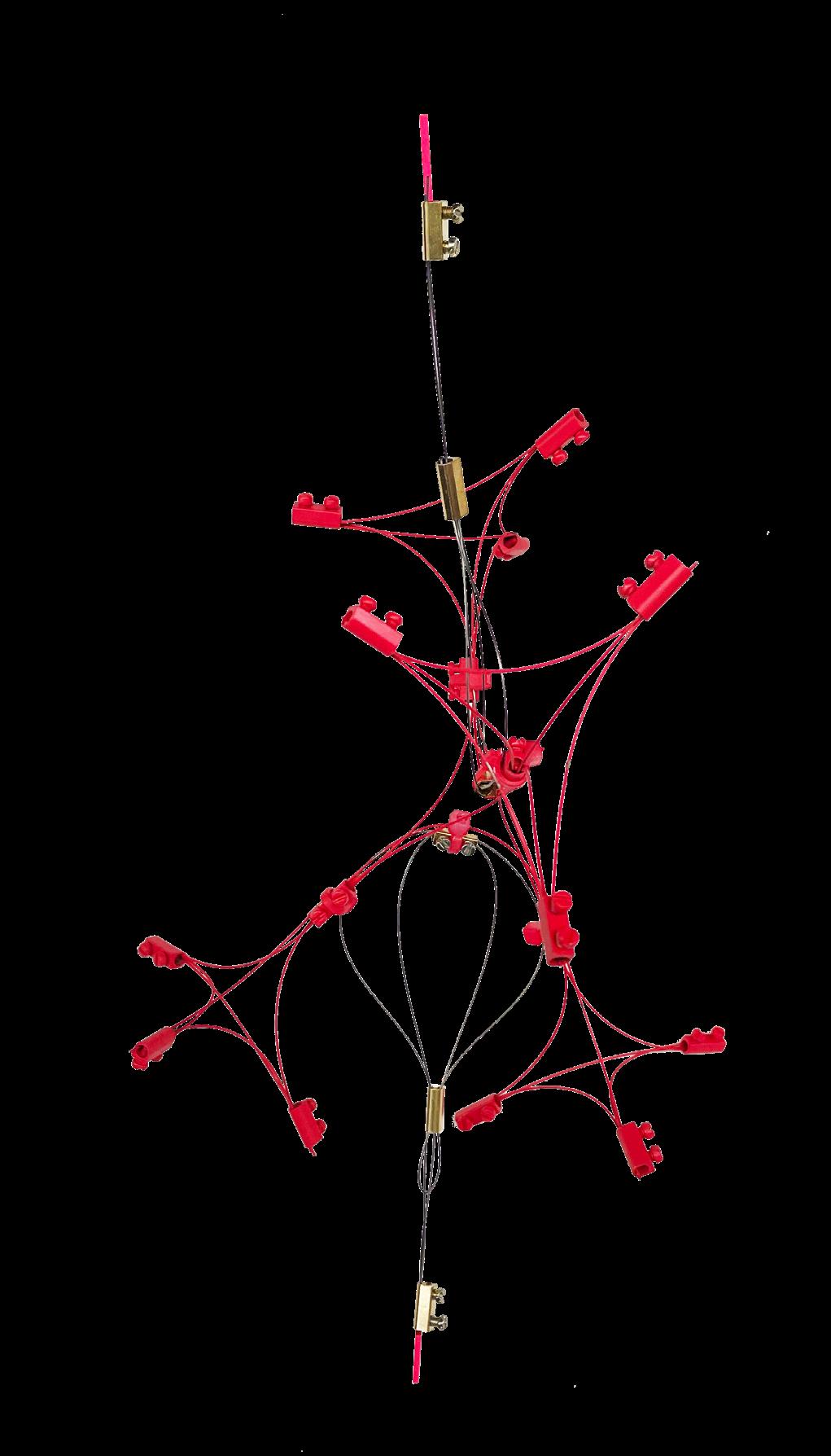
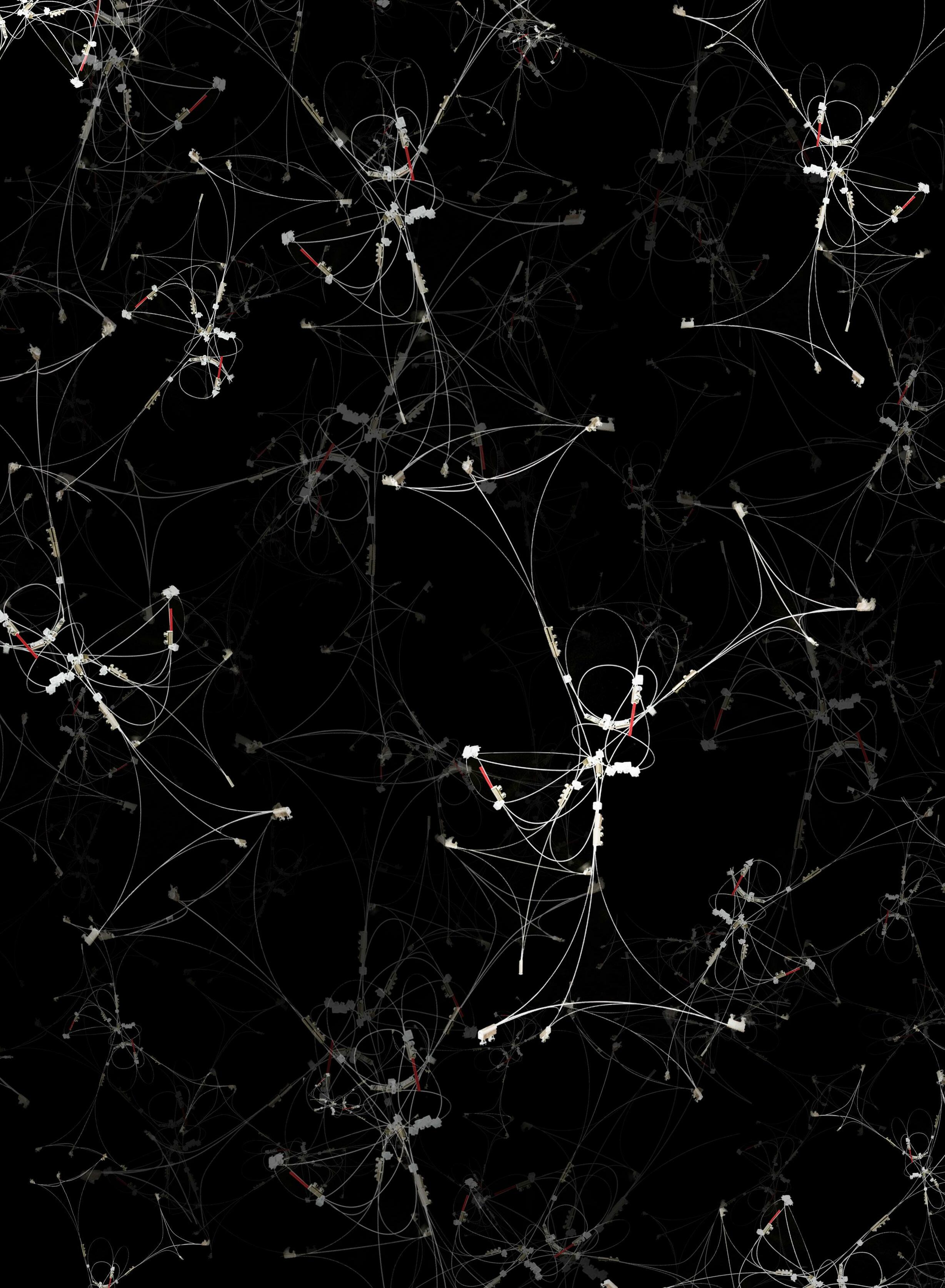
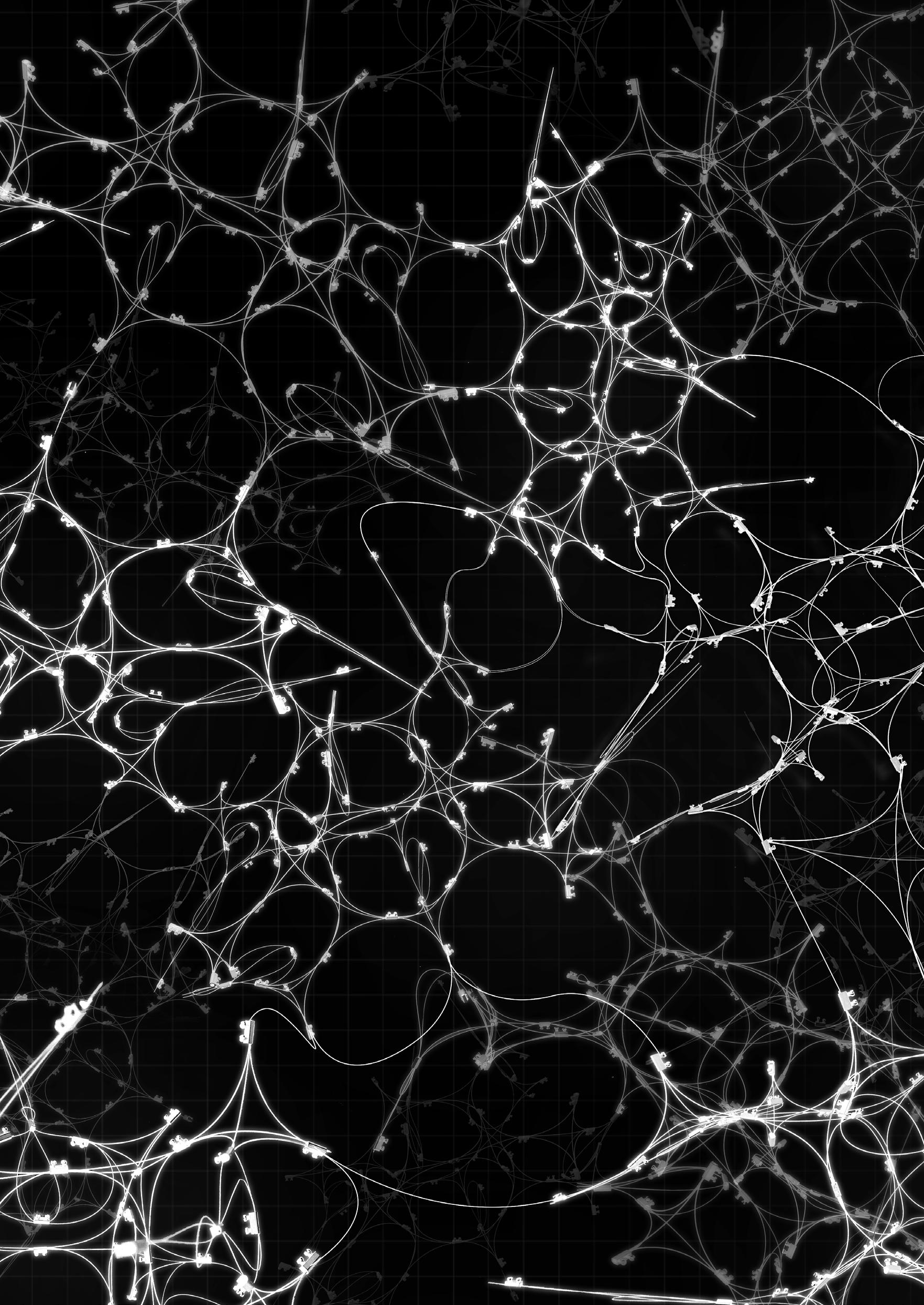
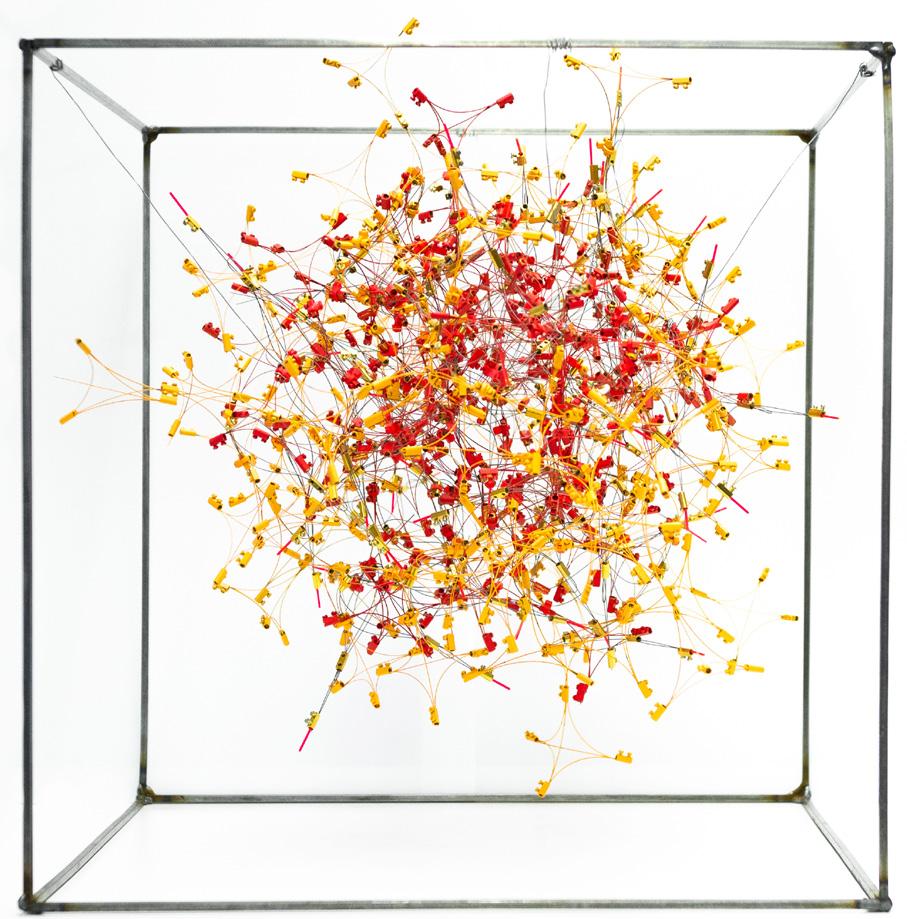
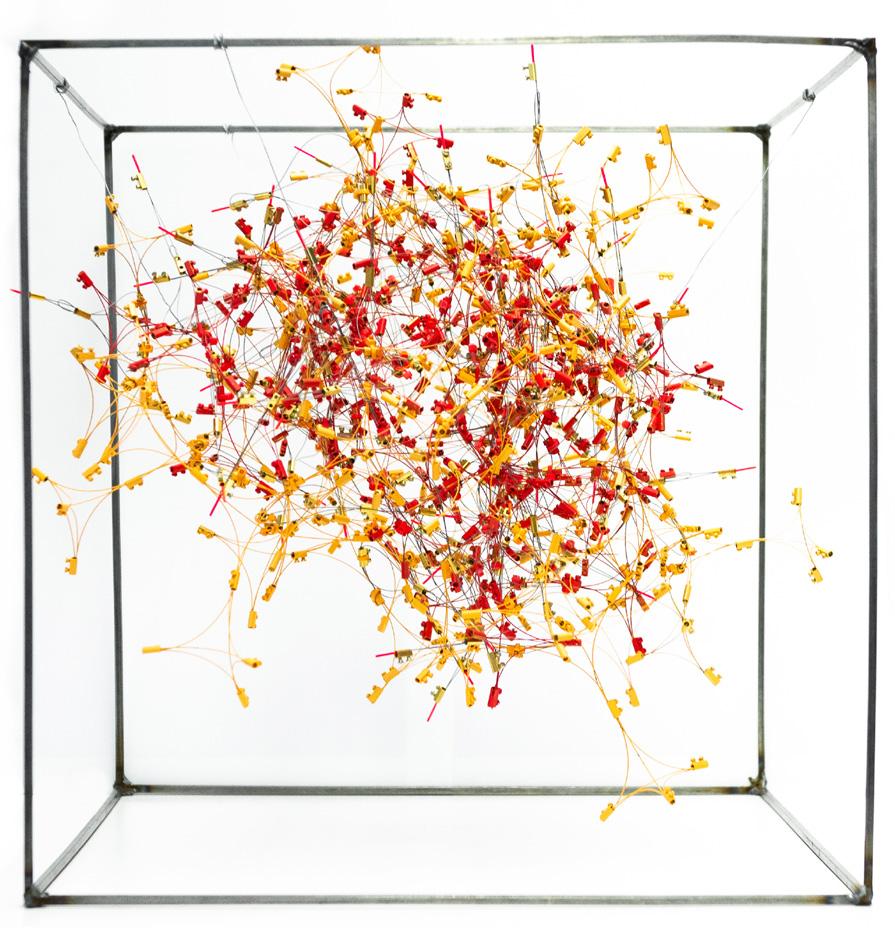
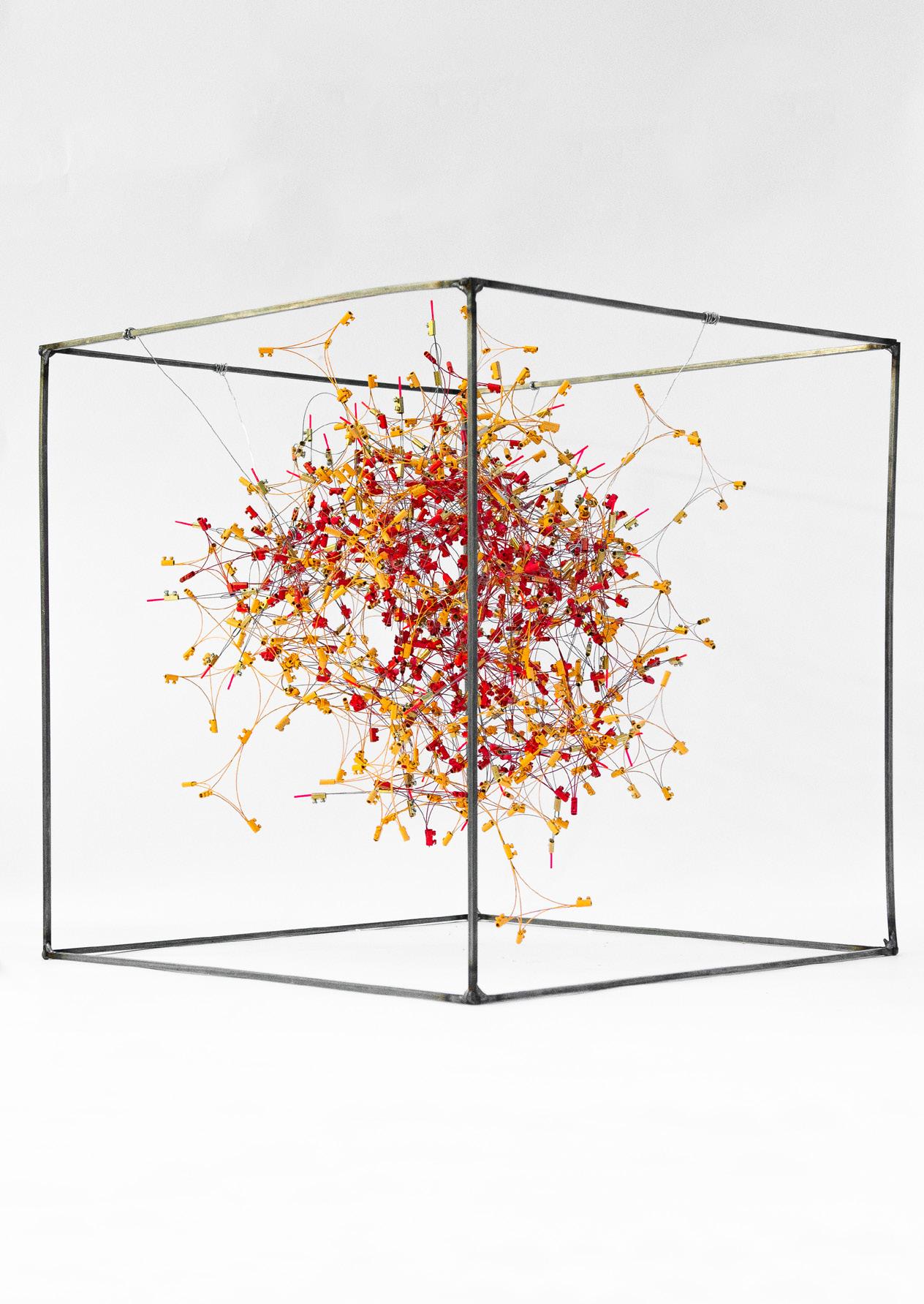
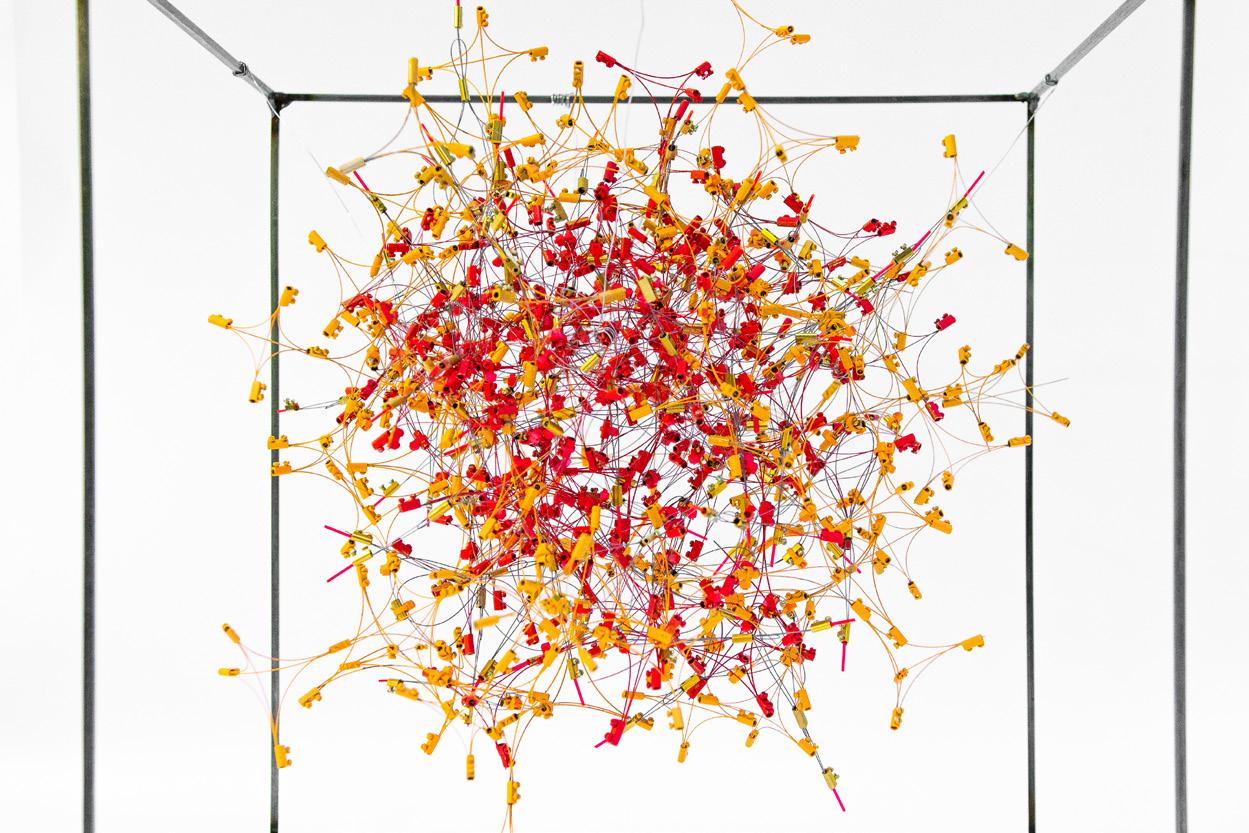
Creating aggregation in a physical form was crucial for an exploratory simulation model. In our physical model, we find that the tension of the components itself allow for a tight and self-reliant total system. We constructed a center cloud of red modules first in order to apply an outter rim of more rigid orange modules. Implicating the deformable component ensured that our aggregation was secure, forming the belief that our experiment has progressed to find structure within active wireframes.


35
PHYSICAL36 CLOUD COMPONENTSPYRAMIDS250100SLIDERS50
ORGANIZED CHAOS
37
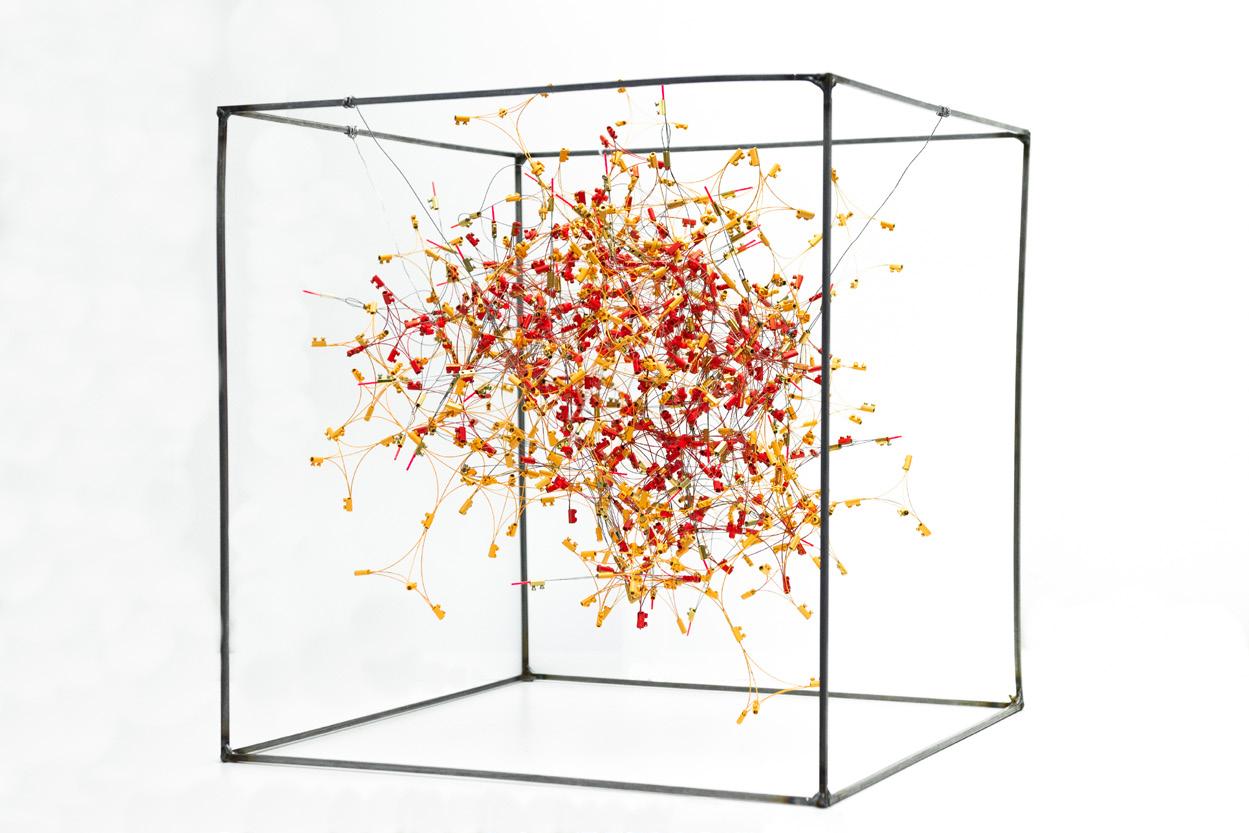
The organization of the whole is not predetermined, rather the organic nature is created through simply applying the attachment process, and allowing it to guide the form. As more are added, the density increases leading to a smaller and smaller form, as we experience further interlocking and intermeshing. We began with only a quarter of the amount, expecting that it would be enough and realized the density of our system is extreme.
The purpose of hanging the model was not to enable an external tension, rather to present that our system of interlocking without joining, works. Wires are attached at four points to one single wire connector within the model. This very small point of interaction removes the frame as a part of the whole physical system—it is merely a method of presentation.




DIGITAL38 modulecontinuousofexperimentedofrepeatingintophysicalexplorationHereframe.creatingfrommoreexperimentextensively,thisthetheAggregationAGGREGATIONPHYSICAL+hasbecomekeytounderstandingapplicationseligibleformodule.Whenrepeatedwebegintoandworkwitharigidbody,intensionitsowncomponents,asafespaceyoucanseeadigitalofhowthecanbetranslatedadensecloud.Bythephotographthephysicalmodel,wewithanideainfinitestructureandconnectionfromtomodule.