Introducción
Larobóticatienedistintaspercepcionesalrededordelmundoque varían desde aterradora y poco fiable a funcional y amigable, la culturapopenlaquenoscriamosinfluyenennuestraconcepción de los robots, a nivel mundial podemos encontrar películas que les dan una reputación escalofriante a los robots, como Terminator, pero a lo contrario también vemos películas como Wall-Equenosenseñannuestradecadenciacomosociedad,yla utilidad de los robots para nosotros en dicha distopía. No es necesario ubicarnos en malas situaciones para saber que la robótica nos beneficia, pero aun a día de hoy podemos vernos influenciados por antiguas percepciones de la robótica, lee y conocemásenestarevista.
1
Introducción………………………………………………………………………………………….……………………1 ¿Qué es la robótica?................................................................................................................3 Principales Características de la robótica………………………………………………………4 5 mitos de la robótica 7 5 Leyendas de la robótica……………………………………………………………………………………..8 Etapas de desarrollo de la robótica…………………………………………………………………..11 Clasificación cronológica de los robots 13 Clasificación por arquitectura del robot 15 Conclusión…………………….……………………………………………………………………………………………16 Webgrafía……………………………………………………………………………………………………………………17
Índice
Índole Robótico
O Larobóticadetentaunenormepotencialcapazdeincidirenla transformacióndediversosaspectosdelavidacotidianadelahumanidad.
¿Qué es la robótica?
Larobóticaesunacienciaqueaglutinavarias ramas tecnológicas: la rama de la ingeniería mecánica,delaingenieríaelectrónicaydelas ciencias de la computación, ocupándose del diseño, construcción, operación, estructura, manufacturayaplicacióndelosrobots.
Estos robots están diseñados para usarse para cualquier propósito, pero se usan en entornos sensibles como la detección de bombas,ladesactivacióndevariasbombas, o reconstrucciónenáreasdedifícilacceso.
Principales características
▪ GradosdeLibertaddelrobot
▪ Zonas de trabajo y dimensiones del brazoomanipulador
▪ Capacidaddecarga
▪ Funciones de Exactitud y Repetibilidad
▪ Resoluciónespacial
▪ Velocidad
▪ Programabilidad
GradosdeLibertaddelrobot
Esta característica de los robots se define comolacapacidaddemovimientogiratorioo de desplazamiento que tiene, también hace referencia a los parámetros necesarios para determinar la orientación y posicionamiento delbrazoarticuladodelosrobotsindustriales deposiciónfija;laescaladegradosdelibertad indicalacapacidaddeflexibilidadquetieneel robotosuelementoterminal.
modernos, los primeros tres grados se empleanparadeterminarlaposicióndebrazo en el área de trabajo y los restantes tres grados se emplean para determinar su orientación, el aumento en los grados de libertad indica que el robot posee mayor flexibilidadenelposicionamientodesubrazo terminal.
En los últimos años se han creado robots industriales con movimiento autónomo que realizan labores complejas como montaje en líneas de producción o soldadura, los cuales requieren un mayor grado de libertad, mientras que los que realizan labores autónomasmássencillascomopaletizacióno pintura requierensolamente4o5gradosde libertad.
Zonas de trabajo y dimensiones del brazoomanipulador
Las dimensiones necesarias de los componentesdelbrazoomanipuladorunido alosgradosdelibertaddeterminanlazonade trabajo de un robot, una característica esencial a tomar en cuenta en la selección e implementación del robot adecuado a las laboresadesempeñar.Lazonadetrabajoestá delimitadaporalgunosaspectosentrelosque resaltan:
La accesibilidad del aprehensor o herramientaubicadaenelelementoterminal.
Ángulo de inclinación para orientación vertical.
Límites de giro o desplazamiento de brazos articulados.
Partedeunbrazorobótico.
Capacidaddecarga
El grado de libertad 6, el cual poseen la mayoría de los robots dedicados a labores industriales, es el estándar para los robots
Sedefinecomocapacidaddecargalacantidad de kilogramos (peso) que puede ser transportado por la herramienta de agarre delbrazoomanipulador,estacaracterísticala
4
define elfabricante delrobotyestá ligada al pesodelaherramientadeagarre.
(offline)programado,yaqueenesemomento sepuedentomarlascoordenadasabsolutas.
La capacidad de carga es una de las características a considerar al momento de seleccionarunmodelode robot para labores industriales, en las labores de mecanizado o soldadura, por ejemplo, se emplean robots con capacidad de carga superior a los 50 kg, en otras labores pueden emplearse robots concapacidadesmuysuperiores.
Funciones de Exactitud y Repetibilidad
Resolución: muchas veces los sistemas digitalesyotrosfactoreshacenquesoloestén disponibles un limitado número de posiciones,porloqueusuariodebeajustarlas coordenadasalaposicióndiscretaquemásse ajuste a las necesidades de funcionamiento delrobot.
Cinemática del error modelado: los cálculos sobre ángulos de juntura pueden tener en algunas ocasiones pequeños errores, esto se debe a que el modelo de la cinemática del robotnoloemparejacontotalexactitud.
Erroresenla calibración:durante elproceso decalibraciónlaposicióndeterminadapuede estarligeramentedesorientada,estoproduce unerrorenlaposicióncalculada.
Errores de azar: durante las operaciones del robot se pueden presentar problemas causadosporfricción,expansióntermal,fallas estructurales, etc., que muchasvecespueden causarvariacionesenlaposicióncalculada.
Exactituddepunto
Laexactituddepuntomideladistanciaentre la posición calculada y la posición real del manipulador del robot, es decir permite conocercómose consigue ubicaralroboten el punto deseado para que pueda cumplir eficientementesuslabores.
La forma más eficiente para determinar la exactitud de punto es en fuera de línea
Repetibilidad
Larepetibilidadmidecómoelmovimientodel manipulador del robot se ubica en la misma posición en cada movimiento, generalmente las variaciones que se presentan son resultado de errores accidentales o aleatorios.
Resoluciónespacial
Esta característica indica el aumento más pequeño de movimiento en que un robot puede dividir su intensidad de trabajo; la resoluciónespacialestáligadaalossistemas que controlan la resolución, así como a las inexactitudesmecánicasqueposeeelrobot.
Velocidad
La velocidadindica la capacidadque tiene el robotpararealizarlastareasparalasqueha sido diseñado en una menor cantidad de tiempo, por lo general la velocidad va a depender del tipo de labor a realizar; en labores de manipulación de piezas o productos y en soldadura las velocidades de trabajorequeridassonaltas;mientrasquelas laboresdepinturaymecanizadolavelocidad tiendeasermediaobaja.
Programabilidad
Los componentes controladores fabricados conmicroy nanoelectrónica incluidosen los módulosdecontroldelosrobotsindustriales permiten una programación eficiente del robot en cuanto a su espacio de trabajo, su velocidad y aceleración, pausas y temporizaciones, sincronización y funciones deseguridad.
5


5 Mitos de la Robótica
1. Los robots eliminarán puestos de trabajo
De hecho, los robots aumentarán puestos de trabajo en los campos de la ingeniería, diseño y fabricación. A medida que más procesos se automatizan con la robótica, los seres humanos tendrán la libertad de hacer otro trabajo en lugar de las tareas repetitivasquetuvieronmuchomástiempo.Elahorroylaproductividadquesederivan de los avances en la robótica impulsar el crecimiento económico en respuesta a un aumentodelaproducción.Laevoluciónesparatodos.
2. Los robots aprenderán a destruir a la humanidad
Mientras que los robots están programados para aprender acciones y deben ser entrenados para tareas específicas, siguen siendo máquinas. Sin embargo, la Inteligenciarobóticatienelímites,yaquenosonseressensibles.Noseráncapacesde darsecuentadequepodríantomarelmundoyliberarsedesusprogramas.
3. Los robots funcionan como por arte de “magia”

LaprogramaciónypruebasdedicadasalacreacióndelaIA(inteligenciaArtificial)es igualquecualquierotrocampocientífico.Hayprogramadoreseingenierosquedeben desarrollar el código y la tecnología detrás de los robots que les permite aprender y pensar.
Laconstruccióndeunrobotnotienequesercaro.Laspartesmáscaros
hardwareysensores,peromuchosrobotspuedenserconstruidos utilizando otros tipos de materiales. Desde el campo de la robóticaestácreciendoaunritmorápidoentodoelmundo,un aumentodelademandaayudaráareducirloscostos.Talcomo sucediera con los primeros televisores o la industria de telefoníacelularymásaúnenlosequiposdecómputo.
Los robots son difíciles de usar
La mayoría de nosotros ya tiene un robot en nuestros bolsillos. No creemos que de Siri o Cortana, los asistentes virtualesennuestrosteléfonos,comolostiposderobots que hemos retratado en las películas, pero su funcionalidadesrepresentativadelarobótica.Con solopulsarunbotón,losrobotspuedendarnos ayudayrespuestasalaspreguntas.
7
Los historiadores suelen remontar la idea de los autómatas a la Edad Media, cuando se inventaron los primeros dispositivos criaturas artificiales y realistas data de los mitos y leyendas de hace al
La historia de Talos, mencionada por primera vez alrededor del año 700 a.C. porHesíodo,ofreceunadelasprimeras robot.
El mito describe a Talos como un hombre gigante de bronce construido por Hefesto, el dios griegodelainvenciónylaherrería. Zeus, el rey de los dioses griegos, encargó a Talos que protegiera la isladeCretadelosinvasores. Talos edor de la isla tres vecesaldíayarrojórocasalosbarcos enemigosqueseacercaban.

Ensuinterior,elgiganteteníauntuboque ibadesdesucabezahastaunode suspiesque llevabaunamisteriosafuentedevidadelosdioses
LahistoriadePandora,descritaporprimera vez en la Teogonía de Hesíodo, es otro ejemplodeunserartificialmítico.Aunque versionesmuyposterioresdelahistoria retratan a Pandora como una mujer saberlo, abrió una caja del mal, el texto original de Hesíodo describía a Pandora como una mujer artificial y malvada construida porHefestoyenviada alaTierraporordenesdeZeus para castigar a los humanos por descubrir el fuego.
8
Durante muchas décadas atrás historias relacionadas con los robots empezaron a circular los medios de comunicación, su influencia ha sido imprescindible para la concepcióndelosrobots,estassonalgunosde losrobotsmásinfluyentesdelosmedios.
T-800: Terminator
Terminator de 1984 es posiblemente responsabledelmiedodealgunaspersonasa los robots y la IA. La película, que ha dado lugar a una franquicia, que incluye varias secuelas, pinta un vívidofuturo en elque los humanos son perseguidos por máquinas gobernadas por un malvado sistema informáticoimpulsadoporIAllamadoSkynet. Después de piratear los sistemas de los Estados Unidos y comenzar una guerra nuclear,lasmáquinasintentanerradicaralos humanos.
El T-800, también conocido como Cyberdyne Systems Model 101, es un robot humanoide avanzado enviado a 1984 desde el mismo futurodistópicoparamataraJohnConnor,el futurolíderdelaresistenciahumana,incluso antes de que nazca. Pero en la segunda película de la serie Terminator 2: El Juicio Final, el T-800 se reprograma y se convierte en el protagonista principal, ayudando a salvar a un joven John Connor de robots más avanzados enviados nuevamente para matarlo. Con IA avanzada y sensores integrados, y una celda deenergíanuclearenlugardeuncorazón,el modeloT-800puede"vivir"durante120años.

Ultrón: Avengers: Era de Ultrón
Ultrón fue una inteligencia artificial que originalmente fue programada para el mantenimiento de la paz en la Tierra creada porAnthonyStarkyBruceBannerapartirde uncódigodescifradoderivadodelaGema de laMentedelCetrodeLoki,conlaintenciónde proteger la Tierra de amenazas internas y externas.Sinembargo,Ultróndesertólaidea y construyó múltiples cuerpos huéspedes, considerandoalahumanidadmismacomola mayor amenaza para la paz en la Tierra, e intentó crear una singularidad tecnológica para cometer genocidio contra ellos. Ultrón casi tuvo éxito, pero sus planes fueron
estropeados por los Vengadores y fue destruidoporVisión.
Jaegers: Titanes del Pacífico
En2013lahumanidadcomienzaaseratacada por los kaijus, una especie de monstruos alienígenas gigantescos que emergen desde unportalinterdimensionalconocidocomo"El Abismo", que se encuentra en el fondo del Océano Pacífico, para exterminar a la Raza humana. Para combatirlos, el mundo entero hace a un lado toda diferencia y rivalidad entre naciones, y todos los recursos
9
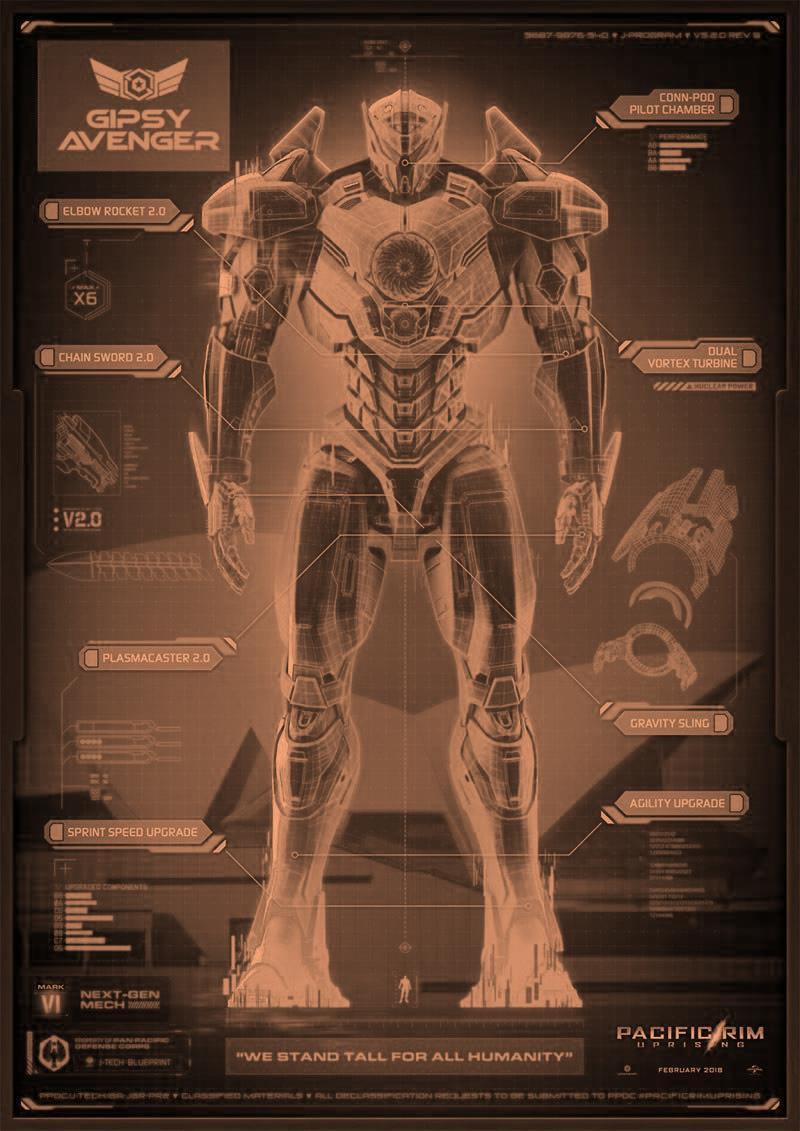
PlanosdelJaeger“GipsyAvenger”
Etapa antigua de la robótica
Etapas de desarro

Etapa de Industrial

Nosetieneunacertezaprecisasobre el surgimiento de la robótica y los primerosrobots,yaqueresultadifícil trazar su origen con precisión. Según registros históricos, los primeros autómatas datan del Antiguo Egipto. Aunque estos mecanismos eran muy rudimentarios en comparación con los actuales, para su época eran considerados muy avanzados e ingeniosos, especialmente para civilizacionescontecnologíalimitada.
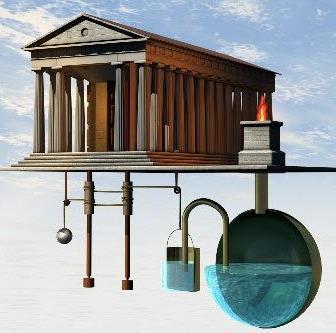
Entres las creaciones de esta época podemos destacar el León Mecánico de Leonardo Da Vinci y las máquinas basadasenlaenergíahidráulicadelos antiguosgriegos.
Podemos situar épocaenlaindustria XVIII, cuando Joseph en 1801 una programable a través perforadas. Después, Industrial impulsó estas máquinas etapaculminaenla Se da el desarrollo mécanicos y el articulado.
llo de la robótica

desarrollo
el inicio de esta industriatextildelsiglo Joseph Jacquard creó máquina textil través de tarjetas ués, la Revolución impulsó el progreso de mecánicas. Esta ladécadade1990.
desarrollo de muñecos primer brazo
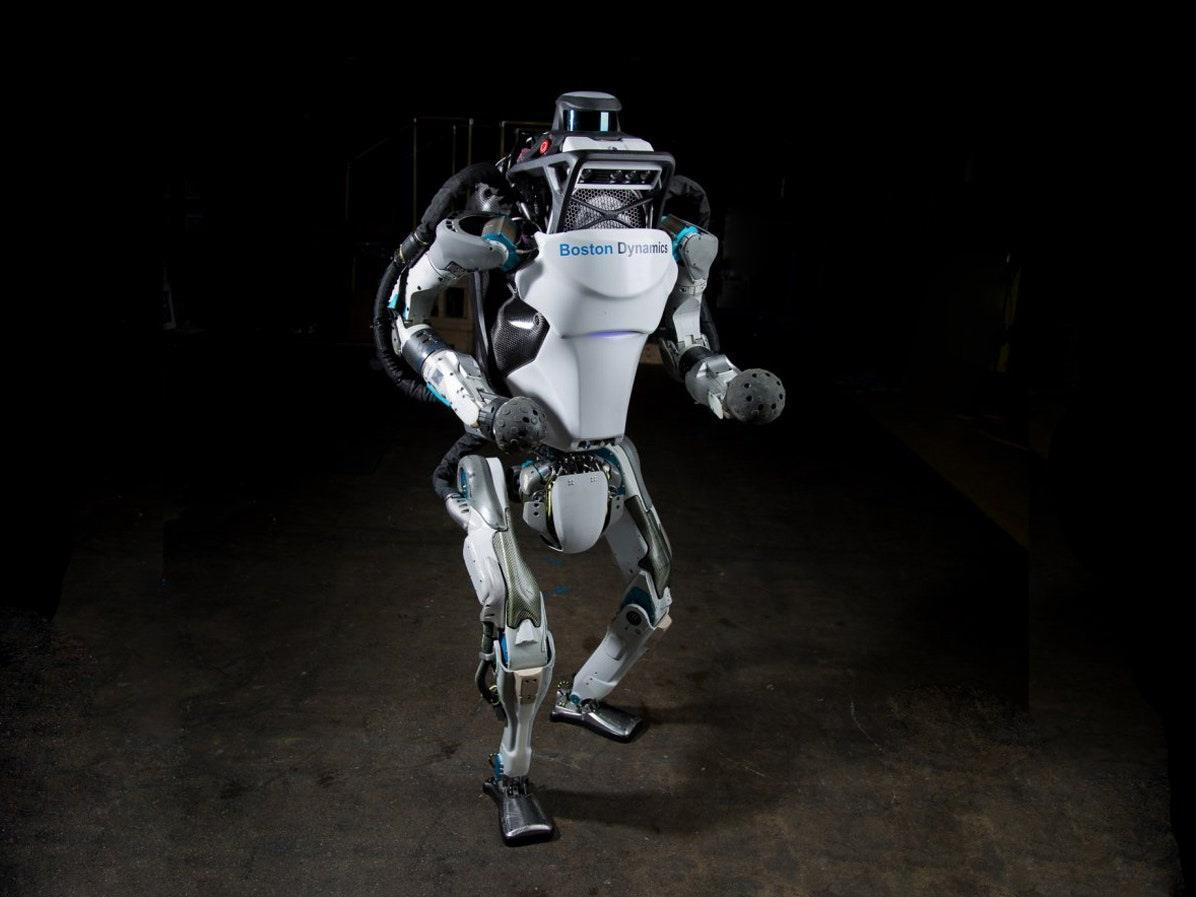
LaRobóticamoderna hacia el Futurismo
A pesar de que se siguen desarrollando robots para usos industriales, en la actualidad se está avanzando en la combinación de la robótica con la inteligencia artificial para imitar al ser humano. En este sentido,laingenieríamecatrónicayla carreraderobóticahan cobradogran relevancia a nivel mundial, lo que ha permitido un avance significativo en estaárea.
Podemosencontrarinvencionescomo elrobothumanoideSophiay elrobot androideASIMOdeHonda.

Clasificación cronológica de los Robots
Primera Generación
Sehandiseñadorobotsmanipuladoresconelfindeeliminarelesfuerzorequeridopara levantar objetos, y estos tienen aplicaciones en diversos campos. Consisten en una columnaqueestáfijaalsueloyquetieneun brazoen voladizoqueincluyeunapinza parasujetarobjetos,yestánequipadosconaccionamientoneumático.
Segunda Generación
Losrobotsdeaprendizajesonaquellosqueutilizansucuerpoparaadquirirhabilidades cognitivas. Este proceso, denominado cognición incorporada, requiere avanzados sistemasdecomunicaciónbidireccionalentrelossensoresdebajonivel,comomanosu ojos, y su procesador de alto nivel. Estos robots están equipados con sensores y hardware físico para realizar tareas humanas. Alobservar la realización deuna tarea humana,tratandeimitarlaconmovimientossimilaresalosdelserhumano.
Tercera Generación
Los robots de control sensorizado son una clase de robots que se caracterizan por utilizar sensores para obtener información sobre su entorno y así modificar su estrategia de control. Estos robots también utilizan computadoras para ejecutar órdenes de programas que permiten al manipulador realizar los movimientos necesarios. Gracias a la información obtenida por los sensores, estos robots pueden tenerunconocimientomásprofundodelambienteenelquesedesenvuelven,loqueles permite adaptar su comportamiento de manera inteligente. Con esta generación de robots, surgieron loslenguajesdeprogramación quepermiten escribir losprogramas decontrolparaestosdispositivos.

13
Cuarta Generación
Secaracterizaportenersensoresmuchomassofisticadosquemandaninformaciónal controladorylaanalizanmedianteestrategiascomplejasdecontrol.Debidoalanueva tecnologíayestrategiasutilizadasestosrobotscalificancomo"inteligentes",seadaptan yaprendendesuentornoutilizando"conocimientodifuso","redesneuronales",yotros métodos de análisis y obtención de datos para así mejorar el desempeño general del sistemaentiemporeal,dondeahoraelrobotpuedebasarsusaccioneseninformación mas solida y confiable, y no solo esto sino que también se pueden dar la tarea de supervisar el ambiente que les rodea, mediante la incorporación de conceptos "modélicos"quelespermiteactuarasituacionesdeterminadas.
Mejores sistemas sensoriales, mejores estrategias de control y análisis de información,capaces de comprender su entorno y actuar ante el mediante conceptos "modélicos"entiemporeal.
Quinta Generación
Lasiguientegeneraciónseraunanuevatecnologíaqueincorporara100%inteligencia artificialyutilizara metodos comomodelos deconductayunanuevaarquitectura de subsumción, además de otras tecnologías actualmente en desarrollo como la nanotecnología.
Esta etapa depende totalmente de la nueva generación de jóvenes interesados en robótica,unanuevaeraderobotsnosespera.
14
Clasificación por Arquitectura de los Robots
Poliarticulados
Dentrodeestacategoríasepueden hallarrobots devariadas formas ydisposiciones, perosu rasgodistintivoesquesonesencialmenteestáticos.
Móviles
Estos robots son altamente móviles y utilizan carros o plataformas para moverse, equipados consistemasdelocomociónquelespermitenrodarydesplazarseconfacilidad.

Androides
Estosrobotstienencomoobjetivoimitarlaaparienciaymovimientosdelserhumano,tantoen sutotalidadcomoen parte. Adíade hoy, los androides son dispositivos pocodesarrollados y carecendeutilidadpráctica.
Zoomórficos
Losrobotszoomórficossedistinguenporsucapacidadparamoversedemanerasimilaralos animales. Esta categoría de robots se enfoca en imitar el comportamiento locomotor de diferentesespeciesanimales,loquelespermiteadaptarsemejorasuentornoyrealizartareas específicas de manera más eficiente. Aunque esta categoría podría incluir también a los androides, queimitan laformahumana, suprincipal enfoquesecentraen laimitación delos movimientosdelosanimales.
Híbridos
Esta categoría de robots se refiere a aquellos que son difíciles de clasificar debido a que su estructuracombinaelementosdelascategoríaspreviamentemencionadas,yaseamediantela combinación o yuxtaposición de características. Por ejemplo, un dispositivo con segmentos articuladosyruedaspuedeserconsideradotantounrobotmóvilcomounozoomórfico.
15
Conclusión
No podríamos decirque llegamos al espacio sin la robótica, y aunque a másqueaunoselevendrálaimagendeunandroidealacabezacuando se habla de robótica, lo cierto es que en ella no solo recae el desarrollo estossofisticadosrobots,quecopianlosmovimientosycomportamientos humanos, sino que la robótica también proporciona el desarrollo de tecnologías que le permiten mejorar a la sociedad, como robots educativos,losrobotsqueayudanalafuerzalaborarenlasfábricas,los robots que realizan actividades peligrosas en lugares humanos o los robotsexploradoresquenospermitenexplorarposibilidadesdevidaen otros planetas, todas estas actividades al beneficio de la humanidad, porque la robótica es y será siendo necesaria para el desarrollo del hombre.
Hipernexo.(2020,12octubre). ▷Característicasdelarobótica-HIPERNEXO .
hipernexo.https://www.hipernexo.com/robotica/caracteristicas-robotica/ colaboradoresdeWikipedia.(2023e).Robótica.Wikipedia,laenciclopedialibre
https://es.wikipedia.org/wiki/Rob%C3%B3tica
StanfordUniversity.(2019,5marzo).Mythicalfantasiesaboutartificiallife .Stanford News.https://news.stanford.edu/2019/02/28/ancient-myths-reveal-earlyfantasies-artificial-
life/#:~:text=The%20story%20of%20Talos%2C%20first,god%20of%20inve ntion%20and%20blacksmithing.
Bayrakdar,I.(2022,10marzo).10mostinfluentialrobotsfromsciencefictionworks.
InterestingEngineering .
https://interestingengineering.com/lists/10-influentialrobots-sci-fi
colaboradoresdeWikipedia.(2023e).PacificRiM.Wikipedia,laenciclopedialibre .
https://es.wikipedia.org/wiki/Pacific_Rim
Historiadelarobótica.(2018,14julio).RobóticaenlaUTP .
http://roboticaenelaulautp.blogspot.com/p/historia-de-la-robotica1.html
Honduras,E.(s.f.).OOPPS...ERROR404 .
https://www.espaciohonduras.net/robotica-y-mecatronica/historia-de-larobotical
Webgrafía
17
“Lospaísesconlamayordensidadderobotstienentambiénlas tasas de desempleo más bajas. La combinación correcta de tecnologíayhumanosimpulsaránlaprosperidad”.
-UlrichSpiesshofer