La Robótica
Y sus características
 Kathryn Broce
COLEGIO MARIA AUXILIADORA tema: la robotica
Kathryn Broce
COLEGIO MARIA AUXILIADORA tema: la robotica
Colegio María auxiliadora
Nombre: Kathryn Broce
Grado:10°A
Fecha:6/27/2023
Materia: tecnología de la información
Año escolar 2023

Índice Tabla de contenido ¿Qué es la robótica y cuáles son sus principales características?.......................................................3 Leyendas, mitos y su evolución. 3 Su Evolución 4 Las etapas de la robótica 4 etapa antigua ......................................................................................................................4 Etapa del desarrollo industrial: 0 Etapa del futurismo.....................................................................................................0
¿Qué es la robótica y cuáles son sus principales características?
R/ Se podría definir robótica como una ciencia que aglutina varias disciplinas o ramas de la tecnología con el objetivo de diseñar máquinas programadas para realizar tareasdeformaautomáticaoparasimularelcomportamientohumanoo animal.
Características: Su cometido, claramente, es desarrollar los diferentes aspectosdeunrobotfuncional:suautonomíaeinteligenciapropia,suresistencia y capacidad de operatividad, su programación y mecanismos de control.
Leyendas, mitos y su evolución.
4. Los robots son caros.
1. Los robots
5. Los robots son difíciles de usar.

Mitos:
1. Son difíciles de usar.
2. Son peligrosos.
eliminaranpuestosdetrabajo.
2. Los robots aprenderán a destruir a la humanidad.

3. Losrobotsfuncionancomopor arte de»mágia».
3. Son responsables de pérdidas de trabajos.
4. Se usan solo para construir automóviles.
5. Generan costos prohibitivos.
Su Evolución
En la evolución de la robótica en las últimas décadas tiene un importante papel la inteligencia artificial (IA). Con este término identificamos aquellas máquinas que imitan funciones humanas, como por ejemplo aprender, resolver problemas o razonar.

Por otro lado, el machine learning (que podría traducirse como “aprendizaje de las máquinas”), es un proceso por el cual se proporciona a las máquinas la capacidad de identificar patrones en cantidades masivas de datos para hacer predicciones.
Las etapas de la robótica
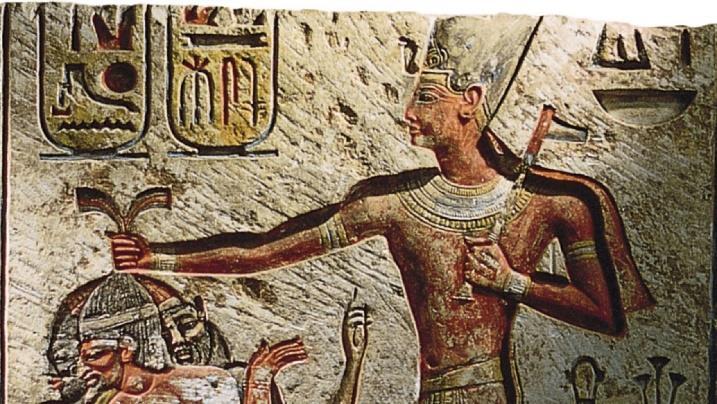
etapa antigua: No se tiene una certeza precisa sobre el surgimiento de la robótica y los primeros robots, ya que resulta difícil trazar suorigen conprecisión. Segúnregistros históricos, los primeros autómatas datan del Antiguo Egipto. Aunque estos mecanismos eran muy rudimentarios en comparación con los actuales, para su época eran considerados muy avanzados e ingeniosos, especialmente para civilizaciones con tecnología limitada.
algunas que emitían sonidos cuando eran tocadas por los rayos del sol. Estos dispositivos se empleaban para infundir temorenlos fielesy reforzar lacreenciaenlas
Existen registros de algunas máquinas que eranutilizadasconfines religiosos,talescomo las enormes estatuas de dioses y reyes que disparaban fuego por los ojos. También se sabe que había estatuas con brazos móviles, que eran operadas por sacerdotes, e incluso
deidades. Aunque las aplicaciones de estas máquinas eran principalmente religiosas, resultan impresionantes si se considera que se utilizaron en una época en la que la tecnología era muy limitada
Etapa del desarrollo industrial: Podemos situar el inicio de esta época en la industria textil del siglo XVIII, cuando Joseph Jacquard creó en 1801 una máquina textil programable a través de tarjetas perforadas. Después, la Revolución Industrial impulsó el progreso de estas máquinas mecánicas.
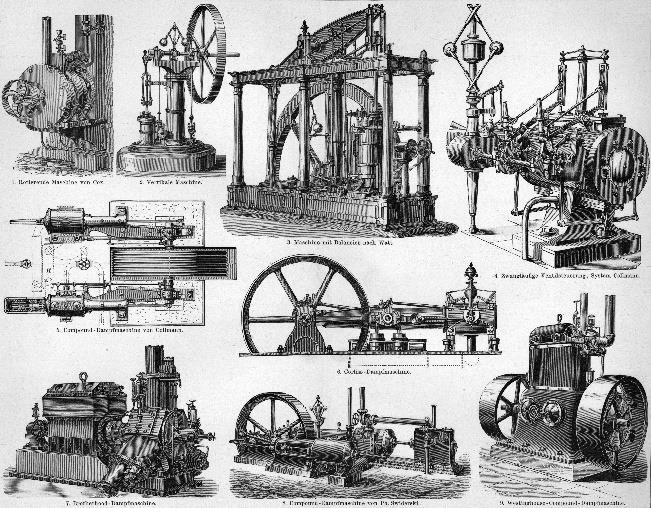
En la Europa de los siglos XVII y XVIII, además de los autómatas religiosos, se construyeron muñecos mecánicos muy ingeniosos que presentaban algunas características de los robots. Jacques de Vaucanson, a mediados del siglo XVIII, construyó varios músicos de tamaño humano.En1805,HenriMaillardetcreóuna muñeca mecánica que podía dibujar. Este dispositivoutilizabaunaseriedelevascomo "programa"parallevaracaboelprocesode escritura y dibujo.
Etapa del futurismo
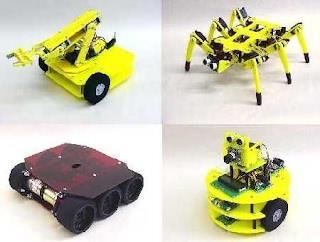
A pesar de que se siguen desarrollando robots para usos industriales, en la actualidad se está avanzando en la combinación de la robótica con la inteligencia artificial para imitar al ser humano. En este sentido, la ingeniería mecatrónica y la carrera de robótica han cobrado gran relevancia a nivel mundial, lo que ha permitido un avance significativo en esta área. Es importante destacar que los robots modernos son cada vez más autónomos y están diseñados para realizar tareas más complejas y variadas. Además, la robótica está siendo aplicada en diversos campos, como la medicina, la exploración espacial y la educación.
Taxonomía cronológica y Arquitectónica
Siglo III a. C. y antes
Una de las primeras descripciones de autómatas aparece en el texto Lie Zi, atribuido a Lie Yukou (ca. 350 a. C.), en el que describe el encuentro, ocurrido varios siglos antes, entre el rey Mu de Zhou (1023-957 a. C.) y un «artífice» conocido como Yan Shi. En este encuentro Shi presenta al rey una supuesta obra mecánica: una figura humana de tamaño natural.
 Yan Shi
Yan Shi
Siglo I a. C. y antes
Descripciones de más de 100 máquinas y autómatas, incluyendo un artefacto con fuego, un órgano de viento, una máquina operada mediante una moneda, una máquina de vapor, en Pneumática y Autómata de Herón de Alejandría.
Autómata
Ctesibio de Alejandría, Filón de Bizancio, Herón de Alexandria, y otros
1738
Banda de robots, autómata de lavado de manos, pavos reales automáticos
1206
AlJazari
c. 1495 Diseño de un robot humanoide. Caballero mecánico Leonardo da Vinci
Pato mecánico capaz de comer, agitar sus alas y excretar.
Digesting Duck Jacques de Vaucanson
Primeros autómatas humanoides creados, banda de autómata programable.
420 a. C. Un pájaro de madera a vapor que fue capaz de volar. Arquitas de Tarento
años 1800 Juguetes mecánicos japoneses que sirven té, disparan flechas y pintan.
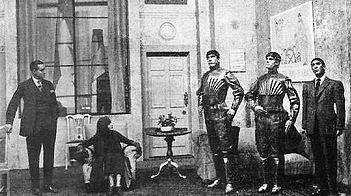
Aparece el primer autómata de ficción llamado "robot", aparece en R.U.R.
1921
Años 1930
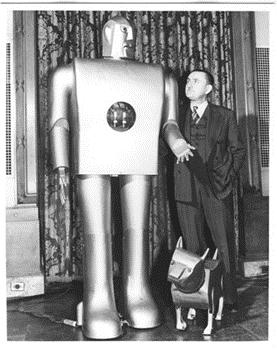
Se exhibe un robot humanoide en la Exposición Universal entre los años 1939 y 1940.
La revista Astounding Science
Elektro
Westinghouse Electric Corporation
1942
Fiction pública "Círculo Vicioso" (Runaround en inglés). Una historia de ciencia ficción donde se da a conocer las tres leyes de la robótica.
SPD-13 (apodado "Speedy")
Isaac Asimov
Juguetes Karakuri
Hisashige Tanaka
Rossum's Universal Robots Karel Čapek
1948
Exhibición de un robot con comportamiento biológico simple 9
Elsie y Elmer
William Grey Walter
1956
Primer robot comercial, de la compañía Unimation fundada por George Devol y Joseph Engelberger, basada en una patente de Devol 10
1961 Se instala el primer robot industrial.
Unimate George Devol
1964 Primer robot paletizador de la compañía japonesa Okura Yusoki.11 Okura Yusoki
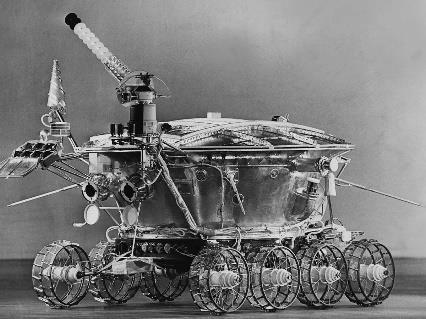
El primer robot soviético que aterriza exitosamente en la superficie de Marte pero se perdió el contacto pocos segundos después.
1971
1973
Primer robot con seis ejes electromecánicos.
Mars 3, dentro del programa Mars
George Devol
1975
Brazo manipulador programable universal, un producto de Unimation.
1976
Primer robot estadounidense en Marte.
Unimate
Unión Soviética
Famulus
KUKA Robot Group
PUMA Victor Scheinman
Viking I NASA
1982
El robot completo (The Complete Robot en inglés). Una colección de cuentos de ciencia ficción de Isaac Asimov, escritos entre 1940 y 1976, previamente publicados en el libro Yo, robot y en otras antologías, volviendo a explicar las tres leyes de la robótica con más ahínco y complejidad moral. Incluso llega a plantear la muerte de un ser humano por la mano de un robot con las tres leyes programadas, por lo que decide incluir una cuarta ley "la ley 0 (cero)."
Robbie, SPD-13 (Speedy), QT1 (Cutie), DV-5 (Dave), RB-34 (Herbie), NS-2 (Néstor), NDR (Andrew), Daneel Olivaw
2002
Robot humanoide capaz de desplazarse de forma bípeda e interactuar con las personas.
2015
Robot humanoide ginoide capaz de reconocer, recordar caras y simular expresiones.
Isaac Asimov
ASIMO Honda Motor Co. Ltd
Arquitectónica
La arquitectura, es definida por el tipo de configuración general del Robot, puede se metamórfica. El concepto de metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un Robot a través del cambio de su configuración por el propio Robot. El metamorfismo admite diversos niveles, desde los más elementales (cambio de herramienta o de efecto terminal), hasta los más complejos como el cambio o alteración de algunos de sus elementos o subsistemas estructurales.
Los dispositivos y mecanismos que pueden agruparse bajo la denominación genérica del Robot, tal como se ha indicado, son muy diversos y es por tanto difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y riguroso. La subdivisión de los Robots, con base en su arquitectura, se hace en los siguientes grupos: Poliarticulados, Móviles, Androides, Zoomórficos e Híbridos.