Chapter 2
2.1
a. Spring constant, k : The change in the force per unit length change of the spring.
b. Coefficient of subgrade reaction, k′: Spring constant divided by the foundation contact area, A k k = ′
c. Undamped natural circularfrequency: m k n = ω rad/s where m = mass = g W
d. Undamped natural frequency: m k f n π2 1 = (in Hz)
Note: Circular frequencydefines the rate of oscillationin termof radians per unit time; 2π radians beingequalto one complete cycle of rotation.
e. Period, T: The time required for the motion to begin repeatingitself.
f. Resonance: Resonance occurs when 1 = ω ωn
g. Critical dampingcoefficient: km cc 2 = where k = springconstant; m = mass = g W
h. Dampingratio: D = km c c c c 2 = where c = viscous damping coefficient; cc = critical dampingcoefficient
i. Damped natural frequency:
1 © 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
2 1 D n d = ω ω n d f D f 2 1 = Principles of Soil Dynamics 3rd Edition Das Solutions Manual Full Download: http://testbanktip.com/download/principles-of-soil-dynamics-3rd-edition-das-solutions-manual/ Download all pages and all chapters at: TestBankTip.com
2.2 Weight of machine + foundation, W = 400 kN
2.3
2.4 External force to whichthefoundation is subjected, kN sin
f = 13.33 Hz
2 © 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
Springconstant,
of the machine + foundation, m = g W = 9.81 400 = 40.77 2 s m kN Natural frequencyof undamped free vibrationis [Eq. (2.19)] m k f n π2 1 = = 77 40 100,000 2 1 π = 7.88Hz FromEq. (2.18), T = n f 1 = 7.88 1 = 0.127s
k = 100,000 kN/m Mass
Springconstant,
100,000 kN/m Static deflection of foundation is [Eq. (2.2)] 3 10 4 100,000 400 × = = = k W zs m= 4mm
Weight of machine + foundation, W = 400 kN
k =
35 t Q ω =
Weight of the machine + foundation, W = 178 kN Spring constant, k = 70,000 kN/m For this foundation, let time t = 0, z = z0 = 0, z = 0v = 0 a. Mass of the machine + foundation, m = g W = 9.81 178 = 18.145 2 s m kN 145 18 70,000 = = m k nω = 62.11 rad/s 62.11 2 2 π ω π = = n T = 0.101s
The frequency of loading, f
13.33 Hz 75rad/s 83 33) (13 2 2 = = = π π ω f
b.
=
ForceQk due to forced part,
See the plot below for F1 vs. t
c. Force due to free part,
= 58.67sin(62.11) kN t
See the plot above in Part b for F2 vs. t
d. Total dynamic force on the subgrade:
12 FFF=+=−+43.51sin(83.75)58.67(62.11) kN tt
The plot of variation of the dynamic force on the subgrade of the foundation due to (a) forced part, (b) free part, and (c) total of the response for time t = 0 to t = 2T is shown in the figure above (Part b).

3 © 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part. 0 1 22 n 22
Fksint 1 35.670,000 (70,000)sin(83.75t) 183.7562.11 ω ωω = = = 43.51sin(83.75)
t
kN
0 2 n 22 nn Qk Fksint 1 ω ω ωωω =− 22 35.670,00083.75 70,000sin(62.11t) 183.7562.1162.11 =−
2.5 The natural frequency of the undamped free vibration of the spring mass system is given by
1 = where k eq = equivalent stiffness of the spring system
For springs attached in series, the equivalent stiffness is given by
The natural frequency of the given undamped free vibration spring mass system is
2.6 The natural frequency of the undamped free vibration of the spring mass system is given by
1
where keq = equivalent stiffness of the spring system
For springs attached in parallel, the equivalent stiffness is given by
The natural frequency of the given undamped free vibration spring mass system is
2.7 The natural frequency of the undamped free vibration of the spring mass system is given by
where keq = equivalent stiffness of the spring system
In the given spring-mass system, springs with stiffness k1 and k2 are in series. Hence, their equivalent stiffness is
Similarly, springs with stiffness k4 and k5 are in series. Hence, their equivalent stiffness is
Now, the given spring system can be reduced to three springs in series.
4 © 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
m k f eq n π
2
2 1 1 1 1 k k keq + = , or 2 1 2 1 1 k k k k keq + =
m k k k k π fn 1 11 × × + ++ = 2 1 2 1 2 1
m k f eq n π2
=
keq = k1 + k2
m k k π fn ) ( 2 1 2 1 + =
m k f eq n π2 1 =
66.67 300 20,000 200 100 200 100 2 1 2 1 )2,1( = = + × = + = k k k k keq N/mm
60 150 100 150 100 5 4 5 4 )5,4( = + × = + = k k k k k eq N/mm
2.9
The resulting system will be three springs in parallel. Their equivalent

5 © 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
by kN/m 276.67 N/mm 276.67 60 150 66.67 )5,4( 3 )2,1( = = + + = + + = eq eq eq k k k k The natural frequency of the undamped free vibration of the spring mass system is given by 100 1000 267.67 2 1 2 1 × = = π π m k f eq n = 8.37Hz Time period 0.119s = = = 37) .8/1( ) /1( nf T
Sinusoidal–varying force, t Q ω 50sin = N; 50 0 = Q N; ω = 47 rad/s 100 1000 276.67 × = = m keq nω = 52.6 rad/s Amplitude of vibration = static deflection zs × magnification M 276.67 50 0 = = eq s k Q z = 0.1807 mm From Eq. (2.34), 2 2 )6. 52 (47 1 1 ) ( 1 1 = = n M ω ω = 4.96 Amplitude of vibration
4.96
0.896mm
stiffness is given
2.8
= 0.1807 ×
=
Weight of the
Mass of the body, kg 13.76 81 135 = = = g W m Spring constant, k = 2600 N/m Dashpot resistance, s/m 11.67N 1000) (60 7.0 - c = =
body, W = 135 N
a.
b.
c.
d.
6 © 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
n d f D f 2 1 = 13.76 2600 2 11.67 2 × = = = km c c c D c = 0.031 76 13 2600 2 1 2 1 π π = = m k f n = 2.19 Hz 19) .2( 031 1 2 × = d f = 2.18Hz
Damped natural frequency [Eq. (2.67)]
Damping ratio [Eq. (2.47b)], 0.031 = × = = = 76 13 2600 2 11.67 2 km c c c D c
Ratio of successive amplitudes of the body is given by [Eq. (2.70)], δ e Z Z n n = +1 where 2 2 1 031 1 031 2 1 2 ln × = = = + π π δ D D Z Z n n = 0.195 195 1 e e Z Z n n = = + δ = 1.215
At time t = 0 s, amplitude Z0 = 25 mm. After n cycles of disturbance 2 0 1 2 ln 1 D D Z Z n n = π ; 2 0 1 2 ln D nD Z Z n = π With n = 5, 2 2 5 0 031 1 031 5 2 1 5 2 ln × × = × × = π π D D Z Z = 0.974 974 5 0 e Z Z = = 2.649; 649 2 25 5 = Z = 9.44 mm
disturbance,
vibration
After 5 cycles of
the amplitude of
= 9.44mm
2.10 0Q = 6.7 kN
ω = 3100 rad/min = 51.67 rad/s Weight of machine + foundation, W = 290 kN
constant, k = 875 MN/m = 875,000 kN/m

Maximum force on the subgrade = 290 + 9.58 = 299.58kN
Minimum force on the subgrade = 290 − 9.58 = 280.42kN
2.11 0Q = 200 kN
ω = 6000 rad/min = 100 rad/s Weight of machine + foundation, W = 400 kN
= 400 + 237.16 = 637.16kN Minimum force on the subgrade = 400 − 237.16 = 162.84kN
2.12 Weight of the body, W = 800 kN Spring constant, k = 200,000 kN/m Dashpot coefficient, c = 2340 kN-s/m
7 © 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
Natural
81 10 290 10 875,000 3 3 × × = = m k nω = 172.04 rad/s From
) ( 1 0 dynam n Q F ω ω = 04) 172 67 (51 1 7.6 = = 9.58 kN
Spring
angular frequency,
Eq. (2.43),
Spring
Natural
frequency, 81 10 400 10 120,000 3 3 × × = = m k nω = 54.25 rad/s Dynamic force, n Q F ω ω = 1 0 dynam 25) 54 (100 1 200 = = 237.16 kN
subgrade
constant, k = 120,000 kN/m
angular
Maximum force on the
2.13 Weight of the body, W = 800 kN Spring constant, k = 200,000 kN/m
coefficient, c = 2340 kN-s/m
From Problem 2.12, damping ratio, D = 0.29
From Eq. (2.28), the amplitude of vertical vibration of the foundation is
b. From Eq. (2.90), the maximum dynamic force transmitted to the subgrade is
8 © 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part. a. 81 800 200,000 2 2 × = = km cc = 8077.1kN-s/m b. Damping ratio, 8077 2340 = = cc c D = 0.29 c. 2 2 29 1 29 2 1 2 × = = π π δ D D = 1.9 d. n d f D f 2 1 = ; 800 81 200,000 2 1 × = π nf = 7.88 Hz 88 29 1 2 × = df = 7.54Hz
0
Operating frequency,
= 100 rad/s
Natural circular
800 81 200,000 × = = m k nω = 49.52 rad/s
Dashpot
Q = 25 kN
ω
a.
frequency,
mm 10 3.795 m 10 3.795 2 5 = = × + = + = × × ×× ) 52 49 (100 29 4 )] 52 49 (100 200,000) (25 ) ( 4 )] ( ) ( 2 2 2 2 2 2 2 2 2 2 2 2 0 n n D k Q Z ω ω ω ω
kN 11.68 = × + × = + 2 2 5 2 2 100) (2340 200,000 ) 10 795 .3( ) ( ωc k Z
Fundamentals of Vibration

© 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.


1
Principles of Soil Dynamics,
Das/Luo
3E
2.1 Introduction
∗ Satisfactory design of foundations for vibrating equipment is mostly based on displacement considerations.
∗ Displacement due to vibratory loading can be classified under two major divisions:
∗ Cyclic displacement due to the elastic response of the soilfoundation system to the vibrating loading
∗ Permanent displacement due to compaction of soil below the foundation
© 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
Principles of Soil Dynamics, 3E Das/Luo
2
2.1 Introduction Cont’d
∗ In order to estimate the cyclic displacement, it is essential to know the nature of the unbalanced forces.
© 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.

Principles of Soil Dynamics, 3E Das/Luo
3
2.1 Introduction Cont’d
∗ Note that a foundation can vibrate in any or all six possible modes.
∗ For ease of analysis, each mode is considered separately and design is carried out by considering the displacement due to each mode separately.
∗ Approximate mathematical models for computing the displacement of foundations under dynamic loads can be developed by treating soil as a viscoelastic material.
© 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
Principles of Soil Dynamics, 3E Das/Luo
4
2.2 Fundamentals of Vibration
∗ Following are some essential definitions for the development of vibration theories:
Free Vibration: Vibration of a system under the action of forces inherent in the system itself and in the absence of externally applied forces. The response of a system is called free vibration when it is disturbed and then left free to vibrate about some mean position.
Forced Vibration: Vibration of a system caused by an external force. Vibrations that result from regular (rotating or pulsating machinery) and irregular (chemical process plant) exciting agencies are also called as forced vibrations.
© 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
Principles of Soil Dynamics, 3E Das/Luo
5
2.2 Fundamentals of Vibration Cont’d
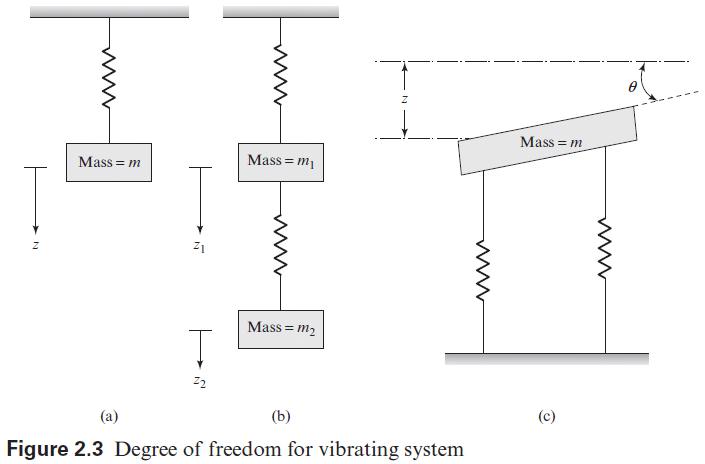
Degree of Freedom: The number of independent coordinates required to describe the solution of a vibrating system.
© 2017 Cengage Learning®. May not be scanned, copied or duplicated, or posted to a publicly accessible website, in whole or in part.
Principles of Soil Dynamics, 3E Das/Luo
6
System with Single Degree of Freedom













