
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net p-ISSN: 2395-0072
Shreya
Jadhav1 , Aishwarya Salunke1 , Umesh Nikumbh1, Prathmesh Salunke1
1 Student, Department of Mechanical Engineering, AISSMS College of Engineering, Pune, India
Abstract - The integrity and maintenance of industrial pipelines are critical for the safe and efficient operation of facilities in sectors such as oil and gas, chemical processing, and water distribution. This project presents the design and development of a Surveillance Rover tailored for real-time inspectionand monitoringof industrialpipelines. The rover is equipped with high-resolution cameras, environmental sensors, and wireless communication systems to detect structural anomalies, leaks, and blockages in confined and hazardous environments. Its compact, modular design allows it to navigate through narrow and complex pipeline systems with minimalhuman intervention.Byintegratingautonomous navigation and remote operation capabilities, the system enhances safety, reduces inspection costs, and minimizes downtime. The proposed solution contributes to predictive maintenance strategies and supports the shift toward smart infrastructure management.
Key Words: Pipelines, oil& gas, Surveillance Rover, structural anomalies, leaks, blockages, safety, high resolutioncameras,sensorsetc
Pipelinesformthebackboneofmanyindustriessuchasoil andgas,waterdistribution,chemicalprocessing,andpower generation.Theyareresponsiblefortransportingessential fluids and gases over vast distances, often through challengingterrainsincludingunderground,underwater,or remote areas. The continuous, uninterrupted operation of thesepipelinesiscriticalnotonlyformaintainingindustrial efficiency but also for environmental and public safety. However, pipelines are prone to various issues including corrosion,mechanicaldamage,materialfatigue,jointfailure, and unauthorized access or tampering. Traditional inspection methods, such as manual patrols and aerial surveillance,oftenfallshortduetotheirlimitedfrequency, highcost,andinabilitytoaccessconfinedorburiedpipelines efficiently. Moreover, failure to detect early signs of wear and damage can lead to catastrophic accidents, environmentalhazards,andeconomiclosses.
To address these challenges, there is a growing need for intelligent, automated, and cost-effective inspection solutions. One such innovation is the Surveillance Rover for Industrial Pipelines,a mobileroboticunitcapable of navigatingpipelinenetworkswhilecontinuouslymonitoring theirstructuralhealth.TheSurveillanceRoverisessentially a robotic surveillance system designed to autonomously
patrol industrial pipelines.Itisengineeredto becompact, rugged, and adaptable to various pipe diameters and environmentalconditions.Thesystemcombinesmechanical mobility with a suite of sensors including visual cameras, ultrasonic probes, infrared detectors, and gas sensors, dependingontheapplicationrequirements.Thecoreideais toenablecontinuous,real-timemonitoringofpipelinesfrom withinoralongsidetheirstructure.TheSurveillanceRover can travel long distances inside the pipe, capturing and transmitting data regarding the pipe’s internal condition. Advanced versions may also use machine learning algorithms to detect and classify anomalies automatically, allowingforpredictivemaintenanceandquickresponseto faults.Thissystemsignificantlyreducestheneedforhuman interventioninhazardousenvironmentsandenhancesthe precisionand reliabilityof inspection data.Italso enables scheduledandon-demandinspectionswithoutrequiringthe pipelinetobeshutdown,improvingoperationalefficiency.
Thestatementoftheprojectis “SurveillanceandInspection ofOilPipeLineUsingaRoverBasedSystem”
Accurate Detection of Pipeline Anomalies: Traditional inspection methodsareoftenslowand inaccurate, risking environmentaldamageandsafetyhazards.Adrone-based system is needed to provide high-resolution, real-time detection of leaks, corrosion, and other structural issues, ensuringcomprehensivehealthmonitoringofthepipeline.
The design of the Surveillance Rover for Industrial Pipelines focuses on achieving mobility, durability, and multi-sensor integration tofacilitate efficient inspectionof pipelines. This section outlines the system architecture, working principle, mechanical and electronic components, and the communication strategy employed to ensure realtime monitoring. Autonomous or manual flights are conducted, with real-time monitoring and data collection. Post-flight, advanced software analyzes images, thermal maps,andsensordatatodetectanomalies.Thefindingsare compiled into detailed reports, which help prioritize maintenance and repairs. This approach improves safety, reduces inspection time, and provides access to hard-toreach areas, making it an invaluable tool for maintaining pipelineinfrastructure.
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net p-ISSN: 2395-0072
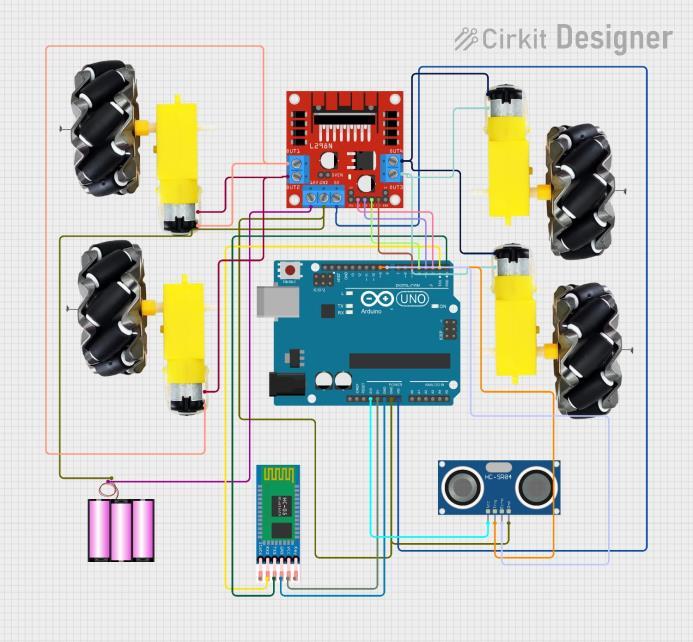
Main Parts:
ArduinoUno:TheArduinoUnoisthecentralprocessingunit of the Surveillance Rover. Based on the ATmega328P microcontroller, it is responsible for interpreting sensor data, controlling actuators, and managing the logic of the rover’smovementandstability.
PowerSupply(BatteryPack):A Li-ion or LiPo battery pack isusedtopowertherover.ItsuppliesenergytotheArduino, sensors,servos,andmotors,eitherthroughseparaterailsor ashareddistributionsystem.
Motor Drivers (L298N Dual H-Bridge): The L298N motor drivermodulesareusedtodrivetheDCmotorsthatprovide movementtotherover.Thesemodulesallowbi-directional control of motors and include protection diodes and heat sinks.
Sensors:
UltrasonicSensors:TheHC-SR04ultrasonicsensorsareused for obstacle detection and distance measurement. These sensorsemitultrasonicwavesandmeasurethetimeittakes fortheechotoreturn,providinganaccuratereadingofthe distancetothenearestobject.
Enhancement:
Bluetooth/Wi-FiModule:Forremotecontrolortelemetry.
Arduino Uno: TheUNO,asthefirstArduinoUSBboardand a key part of the Arduino Software ecosystem, is characterizedbyitssimplicity,multitudeofconnections,and shieldsupport.TheimportantfeaturesoftheArduinoUNO include 6 analogue inputs, 14 digital outputs, a USB connector, a power supply connector and an ICSP header. There’stheArduinoIDE,whichisusedbyprogrammersto writecode,andthissoftwareworksonbothonline/offline systems.
Ultrasonic Sensor: HC-SR04isreliableatshortrange,upto about 4 meters. Typical applications for this sensor are parking sensors, obstacle avoidance in robotics and interactiveinstallations.The HC-SR04modulecontainsan ultrasonictransmitter,receiverandthecontrolcircuit.The sensor projects an ultrasonic frequency in the form of a soundwaveandlistenstotheechoofitswaveobtainedfrom thenearbytargetobject.Bydetectingthetimerequiredfor thesoundwavetoreachthetargetandreturn,themodule calculatesthedistancebased.ItissimpletoreserveArduino or ESP32 with this module because it is connected to the standard digital I/O ports of Arduino or ESP32. When a trigger pulse of a duration less than 10 microseconds is providedtotheHC-SR04,itinitiatesdistancemeasurement and outputs a pulse width in direct proportion to the obtaineddistancevalue.Thesensorrequiresa5-voltsource ofpower.
DC Motor: A DC motor (Direct Current motor) is a device that converts direct electrical energy into mechanical rotational energy. It works on the principle that when a current-carryingconductorisplacedinamagneticfield,it experiences a force that causes rotation. The main components of a DC motor include the stator (which provides a magnetic field), the rotor or armature (which rotates),andthecommutatorwithbrushes(whichmaintain the current direction in the armature for continuous rotation).Inroboticsandsurveillancerovers,DCmotorsare commonlyusedtodrivewheels,enablingtherovertomove forward, backward, or turn by controlling the speed and directionofeachmotor.Thesemotorsareoftencontrolled usingamotordriverliketheL298Nandamicrocontroller suchasArduino. DCmotors are preferred in small mobile robotsduetotheirsimplicity,lowcost,easeofcontrol,and availability in various sizes and torque ratings. In surveillanceapplications,gearedDCmotorsareusuallyused to ensure adequate torque for movement on different surfaces.
L298N Motor Driver: The L298 motor driver is an integratedcircuitcommonlyusedtocontrolthespeedand directionofDCmotorsandsteppermotorsinroboticsand automation projects. It acts as an interface between a microcontroller(likeArduino)andthemotors,allowingthe controllertohandlehighervoltageandcurrentrequiredby
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net p-ISSN: 2395-0072
the motors safely. The L298 can drive two motors simultaneously,providingbidirectionalcontrolbyusingan H-bridgeconfigurationinsidethechip.Itsupportsvoltageup to46Vandcurrentsupto2Aperchannel,makingitsuitable for medium-power applications. Its ease of use and versatilitymakeitapopularchoiceformotorcontrolinDIY electronicsandembeddedsystems.
Power Supply (Battery Pack): A power supply battery pack is a portable source of electrical energy made by combining multiple rechargeable or non-rechargeable batteriesinseriesorparalleltoprovidetherequiredvoltage and current for electronic devices. It is commonly used to powermobileorremotesystemswhereadirectconnection to the mains is not possible. Battery packs vary in size, capacity, and chemistry (such as lithium-ion, nickel-metal hydride,oralkaline),andtheyaredesignedtodeliverstable and reliable power to components like microcontrollers, sensors, and motors. In robotics and portable electronics, batterypacksensurethesystemcanoperateindependently withoutexternalpowersources.
Thesurveillanceroverforindustrialpipelinesisdesignedto inspect,monitor,and navigatethroughpipelinestodetect faults or abnormalities without human intervention. It typicallyconsistsofamicrocontroller(likeArduinoUNO), DCmotorsformovement,anultrasonicsensorforobstacle detection,andamotordriver(suchasL298)forcontrolling the motors. Powered by a battery pack, the rover moves through the pipeline, using differential motor control for turning and navigation. The ultrasonic sensor scans for obstacles and relays the distance to the controller, which adjusts the motion accordingly to avoid collisions. In advanced systems, a camera module may be included for visual inspection, and wireless communication modules (Bluetooth/Wi-Fi)cantransmitreal-timedatatoaremote operator.Thesystemprovidesacost-effectiveandefficient solution for continuous pipeline monitoring, helping to detectleaks,blockages.
Sensors:
Thesensorisusedtodetectdirection,allowingtheroverto movealongastraightpath.
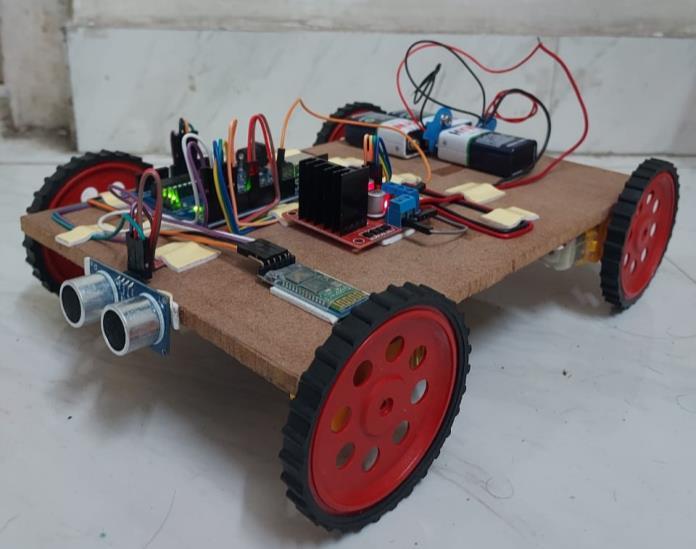
The performance evaluation of the rover revealed several keyinsightsacrossdifferentparameters.Intermsofmobility within the pipeline, the rover demonstrated smooth movement in straight pipes, though it experienced minor issueswhilenavigatingcurves,andtheoveralloutcomewas deemed satisfactory. For obstacle detection, the front ultrasonic sensor was able to reliably identify obstacles withinarangeof10to400cm,leadingtoaratingofhighly accurate. Regarding alignment correction, servo motors effectively adjusted the arms to maintain the rover in a centralposition,showingthatthisfeaturewaseffective.The rover’sturningandnavigationcapabilitieswerefoundtobe functional, as it was able to reverse and turn using differentialmotorcontrol.Finally,powerconsumptionwas evaluated as efficient, with a 12V battery powering the systemforapproximately1.5hours.
Thecurrentsystemfunctionseffectivelyasaprototype,its future scope includes several key enhancements that can greatlyimproveitsperformance,reliability,andpotentialfor commercialization. One major improvement would be the integration of a camera module, such as the OV7670 or ESP32-CAM, to enable visual inspection within pipelines, allowingoperatorstostreamorrecordfootageforremote analysis. Additionally, incorporating wireless communication through Bluetooth or Wi-Fi modules can facilitate real-time data transmission, while an IoT dashboardwouldenablecentralizedmonitoringofmultiple rovers from a control center. Another significant advancement lies in autonomous path planning using machine learning algorithms for obstacle detection and routeoptimization,supportedbyGPSforoutdoornavigation orRFIDsystemsindoors.Mechanically,therovercouldbe upgraded with 360° wheels or caterpillar tracks for
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 06 | Jun 2025 www.irjet.net p-ISSN: 2395-0072
improved mobility, self-charging stations for continuous operation,andwaterproof,corrosion-resistantmaterialsto withstand harsh environments. Lastly, integration with SCADA(SupervisoryControlandDataAcquisition)systems inindustrialapplicationswouldallowforcentralizedcontrol andmonitoring,makingtherovermoreviableforlarge-scale deployment.
Thedevelopmentofthe Surveillance Rover forIndustrial Pipelines marksasignificantsteptowardsolvingreal-world challenges in industrial inspection and maintenance. The projectaimedtodesignandimplementacompact,sensorbased robotic system capable of navigating through pipelines and detecting obstacles or irregularities autonomously. Extensive testing in simulated pipeline environmentsconfirmed thatthe rover couldmaintain its centralalignment,detectobstacleseffectively,andoperate fora reasonabledurationonbatterypower. Theseresults validatethesystem’sviabilityforbasicpipelinesurveillance tasks, especially in hazardous or hard-to-reach environments. Beyond its current functionality, the Surveillance Rover has great future potential. Enhancements like wireless communication, onboard camerasystems,andAI-basednavigationcouldturnitintoa fullyautonomousinspectionunit.Suchdevelopmentswould makeitevenmorevaluableforindustriessuchasoil&gas, water treatment, chemical processing, and municipal infrastructure. This project not only achieved its primary objectives but also laid the groundwork for more sophisticatedroboticsolutionsinindustrial monitoring.It demonstrates how low-cost, modular, and intelligent systems can improve safety, reduce manual inspection efforts, and enhance the efficiency of maintenance operationsintheindustrialsector.
[1] Nandhini, V., & Suresh, P. (2023). Smart Pipeline Surveillance Using IoT and Robots. Int. Journal of EmergingTech.,6(4),89–97.
[2] Pramanik,S.,&Roy,S.(2021). Pipeline Inspection Robot Using Ultrasonic Sensors.IJRA,3(1),23–30.
[3] Subramaniam, M., & Rajendran, R. (2019). Pipeline Monitoring Using Embedded Systems.ICESA.
[4] Kaur,G.,&Mehta,D.(2022). Survey of Mobile Robots in Hazardous Inspection.Int.J.Robotics&AI.
[5] ArduinoProjectHub.(n.d.). Obstacle Avoidance Robot. https://create.arduino.cc
[6] IEEE Spectrum. (n.d.). The Rise of Inspection Robots https://spectrum.ieee.org
[7] Ahmed, N., & Raza, H. (2021). Pipeline Fault Detection Using AI.IJERT.
[8] Robotics Tomorrow. (n.d.). Use of Robots in Oil & Gas Inspection https://www.roboticstomorrow.com
[9] Chen,Z.,&Wu,Y.(2019). Pipeline Robot Navigationwith Sensor Feedback.ICRAConf.Proc.