
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072
Andrew Renault1
1 Grad Student, Dept. of Aeronautical Science, Capital Technology University, South Laurel, Maryland, USA
Abstract - The rapid integration of Unmanned Aerial Vehicles(UAVs)intoglobalairspace,combinedwithasteady riseinmannedaviationtraffic,presentscriticalchallengesto legacyAirTrafficControl(ATC)systems.Thisliteraturereview explores the evolving demands on ATC infrastructure by examining technological, operational, and regulatory gaps thatinhibitthesafeandscalableintegrationofUAVsintoAir Traffic Management (ATM). The study categorizes key research themes into five domains: the impact of UAV proliferation, increasingglobalairtrafficvolumes, emerging surveillance technologies, cybersecurity vulnerabilities, and regulatory frameworks. Multi-sensor fusion, AI-enhanced detection,andautomationareidentifiedasessentialenablers forenhancingsituationalawarenessandreducingcontroller workload.Atthesametime,cybersecuritythreatssuchasGPS spoofing and datalink manipulationpose significant risks to systemintegrityandpublicsafety.Regulatoryinconsistencies across national and international jurisdictions further complicate standardization and integration efforts. The review reveals a pressing need for harmonized policies, interoperable technologies, and adaptive ATC architectures that can evolve alongside future traffic patterns and autonomous flight capabilities. This synthesis of literature highlights areas of research convergence that support modernization, while also identifying knowledge gaps and misalignmentsbetweentechnologicaldevelopmentandpolicy implementation.Thefindingsprovideafoundationforfurther empiricalresearchandsystemdesignexperimentationinthe subsequentchaptersof this dissertation.
Key Words: UAV integration, air traffic control, AI in aviation, radar limitations, cybersecurity, human factors, regulatoryframeworks,multi-sensorfusion
ThemodernizationofAirTrafficControl(ATC) systemsin response to the rapid integration of Unmanned Aerial Vehicles (UAVs) into national and international airspace reflects one of the most critical transformations in contemporary aviation. This evolution has introduced a convergence of complex challenges ranging from sensor andradarlimitations,signalinterference,andUAVdetection failurestoemergentcybersecuritythreats,systemreliability, operator workload, and regulatory fragmentation. Addressing these challenges demands a holistic understanding of both the technological and human
elements shaping the air traffic ecosystem. Over the past decade, UAV operations have grown significantly across military,commercial,andcivilsectors,oftenoutpacingthe infrastructure and regulatory frameworks that support traditional aviation. With UAVs often flying at lower altitudes,beyondvisualline-of-sight,andinenvironments previously unmonitored by legacy radar systems, their proliferation has strained current ATC operations [1]. ConventionalATCinfrastructure designedtotrackmanned aircraft operating along well-established airways must now contend with highly maneuverable, low-RCS (radar cross-section) UAVs operating in dense, cluttered environments [2]. These new realities expose the shortcomings of legacy detection systems, surveillance frameworks,andcommunicationprotocols[3].

Inadditiontotechnicalbarriers,theincreasingautonomy ofUAVsandthedependenceonartificialintelligence(AI)for navigation and control introduce further layers of operationalcomplexity.Fromahumansystemsperspective, ATC personnel are tasked with interpreting new forms of data,managingunpredictableUAVbehavior,andresponding toemergentthreats allwhilemaintainingsafetyacrossa growing spectrum of airborne operations [4]. The intersectionofhuman-machineteaming,interfaceusability, and decision fatigue raises new concerns around training, situationalawareness,andperformanceunderstress[5].At thesametime,gapsininternationalanddomesticregulation haveledtoinconsistentstandardsacrossjurisdictions.The regulatory ambiguity surrounding UAV classification, airspaceaccess,andenforcementmechanismsaddstothe
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072
uncertaintyfacedbyATCauthoritiesandstakeholders[6]. Innovationsindigitalsurveillance suchasADS-B,remote ID,andAI-integratedmulti-sensorfusion offerpromising avenues but also introduce questions of interoperability, data integrity, and compliance [7]. This literature review aims to synthesize current research on these topics and structurethefindingsintothematiccategories,including:the proliferation of UAVs, limitations of legacy radar systems, emergingsensortechnologies,cybersecurityvulnerabilities, regulatory and operational challenges, and the human factors that shape ATC decision-making in the UAV era. Collectively,theseareasformaroadmapforunderstanding howmodernATCsystemsmustevolvetoaccommodatenew aircrafttypes,integrateautomation,andmitigatesystemic risks all while preserving safety, efficiency, and accountability in an increasingly complex airspace environment.
Current ATC systems are not adequately equipped to detect,track,andmanageUAVsthatoperateatlowaltitudes, utilize autonomous control mechanisms, and exhibit unpredictable flight patterns. As UAVs continue to proliferate, these limitations threaten to compromise airspace safety, create inefficiencies, and strain controller workload and cognitive bandwidth [8]. The fragmented evolution of surveillance technology, lack of universally adoptedstandards,andinconsistentregulationsexacerbate this challenge. Furthermore, the cybersecurity landscape surrounding UAV-ATC integration introduces additional vulnerabilities related to spoofing, jamming, and signal hijacking [9]. Without substantial upgrades to sensing, decisionsupport,andpolicyframeworks,theintegrationof UAVsintocontrolledairspacewillremainoperationallyrisky andstrategicallyincomplete.
Thepurposeofthisliteraturereviewistoexaminethe technological, regulatory, and human-centered barriers to effectiveUAVintegrationintoATCsystems,andtoidentify currentinnovationsthatcouldserveasenablersofsystem modernization. Specifically, this paper explores recent advancesinsensorfusion,AI-assistedsurveillance,cognitive workload analysis, and risk-based traffic separation strategies.Drawinguponarobustsetof300+peer-reviewed academic and industry references, the study categorizes emergenttrendsandgapsunderkeythemes,withtheintent to support evidence-based recommendations for future system upgrades and policy interventions [10], [11]. The study is designed to assist aviation regulators, air traffic engineers,andsystemintegratorsindevelopingharmonized frameworkscapableofhandlingmixed-trafficenvironments.
ThemodernizationofAirTrafficControl(ATC)systems toaccommodatethegrowingpresenceofUnmannedAerial Vehicles (UAVs) in national airspace involves a multidimensionalsetofchallenges.Theseincludelimitations in legacy radar systems, increasing system complexity, human-machineinteractionconcerns,cybersecuritythreats, and evolving regulatory landscapes. As the aviation environmentbecomesmoretechnologicallyadvancedand operationallydiverse,recentscholarlyresearchhassought to identify, evaluate, and recommend adaptations that enhance system resilience, safety, and scalability. This section presents a thematic review of current literature, organized into six focal areas: Introduction to ATC Modernization,UAVProliferation,GlobalAirTrafficGrowth, Emerging Surveillance Technologies, Cybersecurity Considerations,andRegulatoryandOperationalChallenges. Eachsubtopicreflectstheconvergenceofacademicinsight andindustrypractice,providingafoundationforidentifying researchgapsandinformingfuturesystemdesignefforts.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072
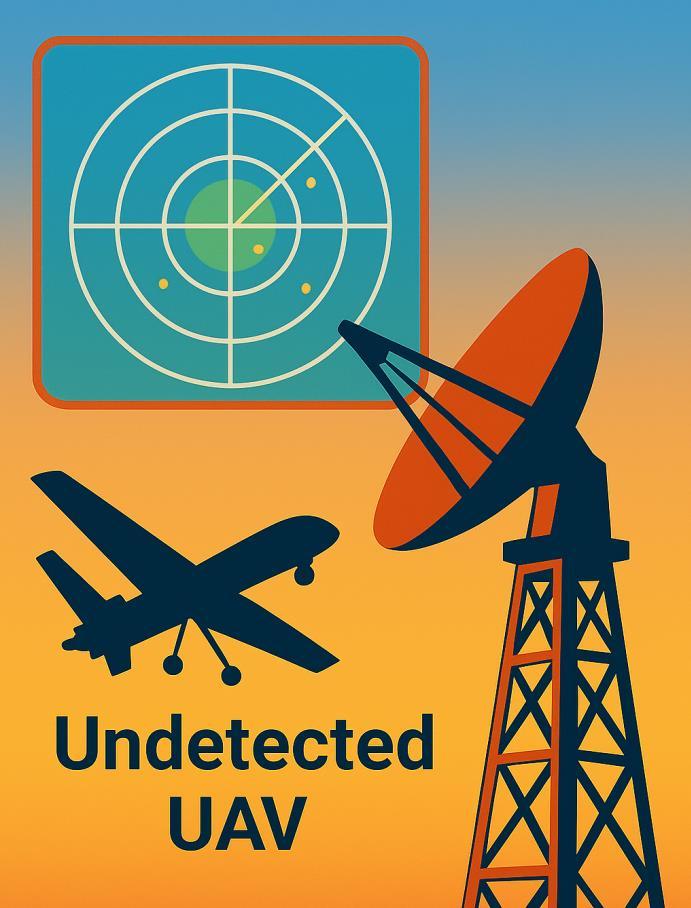
ThemodernizationofAirTrafficControl(ATC)systems to manage the integration of Unmanned Aerial Vehicles (UAVs) into national airspace presents a complex intersection of challenges related to radar limitations, system reliability, human factors, cybersecurity, and regulatoryreadiness.Astheaviationlandscapecontinuesto evolve, scholarly research has explored a range of technological and operational adaptations required to ensure that ATC systems remain robust, secure, and adaptable. This section discusses recent findings and synthesizeskeycontributionsacrossmultipledimensionsof the modernization effort. The integration of UAVs into nationalairspacehasexposedcriticalweaknessesinexisting ATC radar infrastructure. Traditional radar systems, optimizedforlarge,metallicaircraftoperatingatpredictable altitudes and velocities, struggle to detect and accurately track small, low-signature UAVs. As Gunawardana [10] explains,thelimitedradarcross-section(RCS)ofUAVs,often compounded by non-metallic composite construction, resultsinpoorsignalreflection,causingUAVstoeitherblend with ground clutter or evade detection entirely. This presents a direct safety risk in shared airspace environments.
Conteetal.[3]highlightanotheremergingcomplication: the deliberate use of drone swarms as radar countermeasures. Multiple UAVs flying in coordinated patternsgenerateconfusingradarsignatures,overwhelming traditionaldetectionalgorithmsandcreatingambiguityfor ATCoperators.Theirstudyemphasizestheurgentneedfor ATC modernization not only to passively detect UAVs but also to actively distinguish legitimate aircraft from coordinatedUAVincursions.Thedynamic,low-altitude,and unpredictableflightpathsofUAVsfurtherexacerbateradar detection challenges. Pang [7] discusses how artificial intelligence(AI)andmachinelearning(ML)offerpromising solutions,enablingradarsystemstodifferentiatebetween UAVs and background clutter by learning from large datasets. These AI-enhanced systems have demonstrated superiorperformanceovertraditionalfilteringtechniques, especiallyincomplexairspaceconditionsinvolvingterrain maskingandurbanclutter.
AccordingtoXiaetal.[8],conflictriskmodelingforUAVs insharedairspacerequiresarethinkingoftraditionalradar surveillance paradigms. UAVs often operate in close proximity to obstacles and manned aircraft, reducing the time available for conflict detection and resolution. The authorsproposeminimumsafetycommunicationintervals andpredictiveconflictmodelsasessentialcomplementsto upgraded radar capabilities. A growing body of research points toward the necessity of multi-sensor fusion approaches. As noted by Tang et al. [2], passive radar systems using signals from existing non-cooperative sources such as commercial broadcasts have shown
potentialforUAVdetection,especiallywhencombinedwith active radar, optical, acoustic, and RF-based sensors. The futureATCenvironmentwilllikelyrelyontheseintegrated surveillance ecosystems to compensate for the inherent limitationsofanysinglesensormodality.Ganauetal.[14] propose augmenting the RCS of small UAVs through the additionofreflectiveelements.Althoughnotapanacea,such design changes could facilitate easier radar detection, particularlyincontrolledairspaceoperations.
Finally,recentworkusingmicro-Dopplerradarimaging demonstrates that UAVs possess unique micro-motion signatures,suchaspropellerrotations,thatcanbeexploited for classification and tracking [6], [33]. These advances suggest a path forward where ATC radars evolve into intelligent, learning-enabled systems capable of both detectionanddiscriminationofUAVsinrealtime. Despite promisingtechnologicaladvances,fundamentalchallenges persist. As discussed by Renault and Johnson [30], the modernization of ATC systems must be comprehensive, involvingnotonlytechnicalupgradesbutalsopolicyreform, cybersecurity enhancement, and human factors consideration. Without a coordinated effort across these domains,theabilitytoreliablydetectandmanageUAVsin sharedairspacewillremaindangerouslylimited.
TheintegrationofUnmannedAerialVehicles(UAVs)into theNationalAirspaceSystem(NAS)introducessubstantial challenges for Air Traffic Control (ATC), driven by unique UAV characteristics that diverge significantly from traditionalmannedaviation.Thesecharacteristics ranging fromphysicaldesigntooperationalbehavior necessitate targetedmodernizationofATCframeworksacrossdetection, coordination,communication,andsafetyassurancedomains. Unlike conventional aircraft, UAVs are distinguished by variability in size, flight autonomy, mission profiles, and communication constraints. These traits complicate radar detection,trajectoryprediction,andoperationalcontrol.For example, UAVs often lack standardized transponders and operate at altitudes and velocities that blur distinctions
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
betweenrecreational,commercial,anddefensemissions[1], [12].
Mission autonomy and self-directed routing pose a considerable challenge. UAVs capable of real-time path planning using onboard decision logic may alter routes dynamically based on environmental, tactical, or missionbased criteria [2], [13]. While this increases mission flexibility, it limits ATC's ability to anticipate flight paths, especially when UAVs bypass traditional flight corridor constraints. Additionally, low-visibility operations including nighttime surveillance pose new detection barriers. He et al. [34] introduced REUT, a Retinex-based low-light image enhancement system for UAV tracking, demonstratingimprovedvisibilityinsuboptimalconditions. However, these enhancements often benefit the UAV operator more than ATC radar systems, which remain optimizedforconventionalaircraft.UAVvulnerabilitiesalso extendtocybersecurity.Tianetal.[36]detailedadversarial attacks that exploit deep learning-based control systems. SuchbreachescouldallowUAVstobespoofed,misdirected, orhijacked,presentingacriticalthreattoairspaceintegrity. Defensivestrategies,likeadversarialtraininganddefensive distillation,arestillevolvingandnotwidelydeployedacross UAVfleets.
Table 1:KeyUAVCharacteristicsandATCImplications
UAVCharacteristic
SmallRadarCross-Section Reduceddetectabilityonradarsystems
LowAltitudeOperations Potentialinterferencewithmannedairtrafficin sharedairspace
HighManeuverability Flightunpredictabilitycomplicatestrackingand separationassurance
LacksStandardTransponders InvisibletoADS-BandSSRsystems;creates coordinationblindspots
AutonomousNavigation Minimalreal-timehumaninputreduces controlleroversight
LimitedCommunications Inabilitytocomplywithreal-timeATCdirectives
Short/VariableEndurance Difficultyinpredictingmissionprofileor trajectory
The physical and operational limitations of UAV communication systems further exacerbate integration issues. Most UAVs depend on battery-conserving, lowbandwidthnetworks.Karachaliosetal.[37]evaluatedUAV telemetry over LoRaWAN and concluded that efficient communicationpayloadsmustbalancepowerefficiencywith the high-frequency updates ATC systems demand. Loss of positionaldata orlatencyinitstransmission impairsthe ATC’s situational awareness. Heavy-lift and commercial cargoUAVsintroduceadditionalcomplexityduetosizeand weight considerations. Li et al. [33] documented ATC challenges in China as large UAVs began commercial operations. Key issues included airspace classification mismatches,workloadmisallocationamongcontrollers,and underdeveloped regulatory mechanisms. These findings mirrorbroaderglobalconcernsregardingthereadinessof legacyATCsystemstoaccommodatenext-generationUAVs.
Multi-vehicleoperationsrequirenovelcoordinationmodels. Liu et al. [35] proposed a multi-sensor network-based trajectory planning framework that uses real-time data exchange among UAVs for collision avoidance. Though promising,thisdecentralizedmodelcontrastssharplywith traditional ATC’s centralized control philosophy and necessitatesupdatedsurveillancetoolscapableofmanaging swarmdynamicsandself-organizingtraffic.
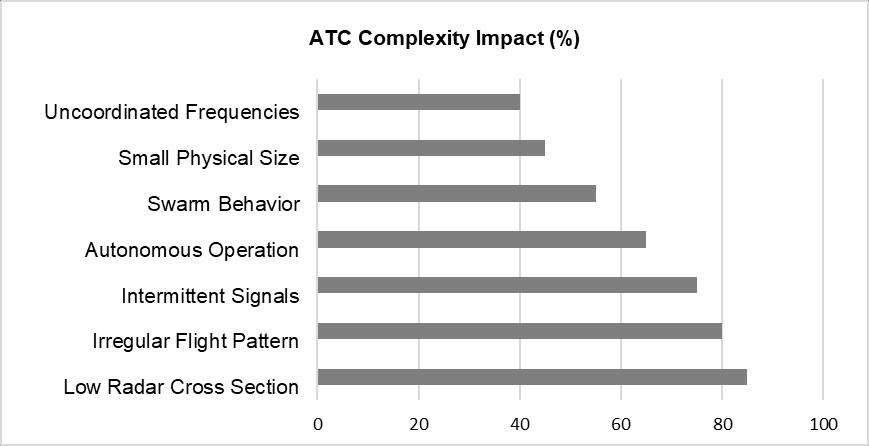
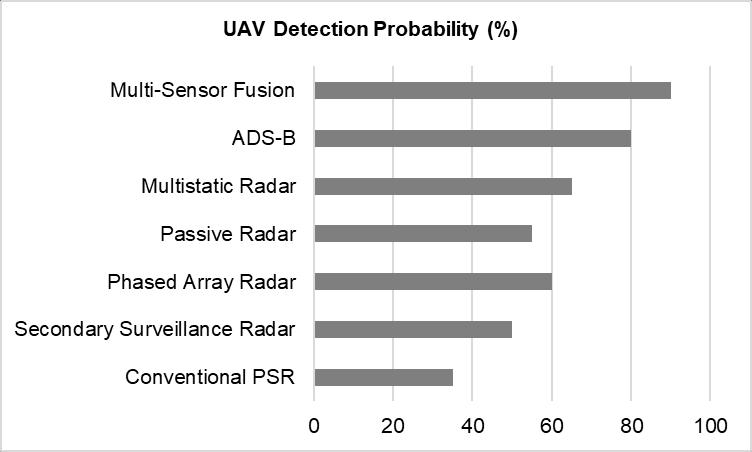
Graph 2: UAVCharacteristicvs.EstimatedATC ComplexityImpact(%)
ATCImplication Table: Key UAV Characteristics and Their ATC Implications
This 2-column table highlights critical UAV characteristics and the operational implications each poses to ATC systems. With detectability, control, and coordination challenges increasing, these UAV-specific traits demand dedicated modernization responses in surveillance, policy, and communication frameworks.
Swarmcoordinationitselfintroducesemergentbehavior that challenges predictability. El-Ferik [25] applied biologicallyinspiredalgorithms modeledafterpredatorpreyrelationships tomanageUAVbehaviorunderthreat conditions.Whileeffectivefordecentralizedriskresponse, suchmodelsdemandATCsystemscapableofinterpreting swarm behavior, necessitating machine learning-based trafficforecastinganddistributedsystemlogic.Tomitigate theimpactsofthesechallenges,UAVdesignandATCpolicy mustco-evolve.Designmodificationssuchaspassiveradar reflectors [14] or harmonized transponder standards can enhance UAV detectability. Simultaneously, ATC systems shouldincorporateAI-assistedforecasting,low-latencydata ingestion,anddecentralizeddecisionlogictoremainviable. In conclusion, the evolving characteristics of UAVs autonomy,trajectoryflexibility,stealth,communicationgaps, cyber risk, and distributed group behavior present formidable challenges to existing ATC paradigms. Addressing these challenges requires holistic ATC modernization strategies and collaborative efforts across academia,regulatorybodies,andindustrystakeholders to ensure safe and scalable UAV integration into controlled airspace.
TheintegrationofUnmannedAerialVehicles(UAVs)into nationalairspaceispromptingasignificantmodernizationof AirTrafficControl(ATC)systems,especiallyintherealmof surveillancetechnologies.Traditionalradarsystemsalone are increasingly insufficient to detect, classify, and track small,low-RCS(radarcross-section)UAVsoperatingatlow altitudes or in urban environments. As such, emerging
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072 © 2025, IRJET | Impact Factor value: 8.315 |
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net
surveillance technologies including multi-sensor integration and artificial intelligence (AI) are being introduced to bridge these gaps and improve system responsiveness.
TechnologyType
Function/ImpactonATC
p-ISSN: 2395-0072
reinforcement learning framework for aviation that optimized planning and scheduling tasks, which can be extended to adaptive UAV sensor scanning and traffic responsiveness in dynamic airspace environments. These systems can support real-time adjustments to detection thresholdsandprovidethefoundationforproactivetraffic management.
Reference(s)
Multi-SensorFusion(Acoustic+IR) ImprovesUAVdetectioninnoisy/cluttered environments [15]
Millimeter-Wave+OpticalRadar Enhancestargetvisibilityinobscuredor urbanareas [19]
Edge-ComputingSensorNetworks Reduceslatency,enablesreal-timeUAV tracking [13]
RadarCross-SectionEnhancement Facilitatesconventionalradardetectionof smalldrones [14]
Audio-VisualFusionwithDeepLearning Boostsclassificationaccuracy,reduces falsepositives [15]
ReinforcementLearningforATC Automation Optimizesscanningandresponseplanning indynamicairspace [6]
DigitalTwinforReal-TimeConflict Prediction Supportstrajectorypredictionandproactive conflictresolution [6]
Multi-sensor fusion is becoming a cornerstone for enhancing ATC’s capability to monitor UAVs in real time. Instead of relying solely on primary and secondary radar, ATC centers are increasingly deploying systems that combineradar,electro-optical(EO),infrared(IR),acoustic, and RF-based sensors. Recent work has shown that convolutional neural network-based sensor fusion of microphone acoustics with infrared imagery can significantly improve drone detection performance in cluttered,noisyenvironmentscomparedtosingle-modality methods [15]. Zhang et al. [19] showed that millimeterwaveradarcanpenetrateenvironmentalobscurantsandis particularlyeffective when combined withoptical sensors for improved target resolution. Xu et al. [13] proposed an edge-computingarchitectureusinglayeredsensormodules for real-time UAV tracking and classification. Their simulations showed reduced latency and enhanced throughput, essential features for dense urban corridors. Ganauetal.[14]emphasizedtheimportanceofenhancing theradarcross-sectionofsmallUAVsbyintegratingradar reflectorelements,whichaidindetectionbyconventional radarsystems.
AI-drivenautomationisrevolutionizingATC’sabilityto manage UAV traffic. With the exponential growth of UAV operations,traditionalsurveillancestrategiesarenolonger scalablewithoutsubstantialhumanresourceexpansion.AI offers real-time decision-making, anomaly detection, and adaptive sensing capabilities that extend ATC system performance. Allaetal.[15]deployedanaudio-visualfusion approach using deep learning, demonstrating enhanced classification of UAVs across multiple sensor feeds and significantly reducing false-positive rates under various visibilityandnoiseconditions.Similarly,Hu[6]developeda
Hu [6] also explored the application of digital twin concepts, where simulation environments modeled UAV behaviorandupdatedinrealtimeusinglivedata,enabling ATC systems to anticipate trajectory conflicts and reduce operational risk. As automation and AI become central to surveillance,human-AIteamingmustbecarefullydesigned to preserve situational awareness. Decision support interfacesandAIexplainabilitytoolsarebeingexploredto help human controllers trust and understand machinegeneratedassessments.Inconclusion,emergingsurveillance technologiessuchasmulti-sensorintegrationandAI-driven analytics are reshaping the ATC surveillance architecture. ThesesystemsenhanceUAVdetectability,improvereal-time responsiveness,andreducehumanworkload keyenablers forsafeandefficientintegrationofUAVsintothe national airspace.
UAVsandATCsystemsaresusceptibletoabroadrange ofcyberthreats,includingspoofing,signaljamming,denialof-service (DoS) attacks, and data manipulation. These threatscancompromiseUAVpositioning,sensorreliability, andcommunicationwithgroundcontrolstations[1],[15]. ThedecentralizednatureofUAVoperations,oftensupported by cloud services and wireless telemetry, further exacerbatestheserisks[2],[16].Spoofingattackstargeting GNSSsignalsareparticularlycritical.Asuccessfulspoofing incident canmisleadUAV navigationsystems, resulting in trajectory deviation or airspace intrusion. Tang et al. [2] demonstrated how passive radar and multi-sensor correlationarebeingevaluatedtodetectanomaliesinUAV flightbehaviorandimproveresiliencetospoofing.
StudiessuchasZhangandLiu[19]havehighlightedthe increasingsophisticationofjammingandmalwareinsertion strategies, especially in high-density urban environments whereUAVsoperateautonomously.Attackersmayexploit vulnerabilitiesinsoftware-definedradios(SDRs)orground station firmware, targeting ATC data exchange protocols withminimaldetection.The2021RedTeamsimulationby the European Union Aviation Safety Agency (EASA) demonstrated coordinated UAV jamming across multiple frequencies, causing temporary ATC blind spots. These findingsunderscoredhowlatencyandlossoftelemetryin ATCoperationsduringUAVcoordinationpresentsignificant riskstomanned-unmannedaircraftseparation[4],[17].
Volume: 12 Issue: 05 | May 2025 www.irjet.net
TheresponsetoUAV-specificcybersecuritythreatshas emphasized real-time intrusion detection systems (IDS), encrypted control channels, and digital signature authentication protocols [5], [18]. AI-based anomaly detection models trained on historical ATC and UAV telemetrydatahaveshownpromiseinidentifyingbehavioral deviations that may indicate a cyberattack [6], [19] Furthermore,blockchain-basedauthenticationforUAV-toATCcommunicationisgainingtractionforitsimmutability and resilience against message tampering [7], [20]. While these solutions offer theoretical robustness, deployment challengesremainduetoreal-timeprocessingdemandsand legacyATCinfrastructure.
Table 3:UAVThreatImpactvs.MitigationEffectiveness
security protocols that align with evolving UAV architectures.
Table 4:CybersecurityThreatsandDefensesinATC-UAV Operations
Cybersecurity Threat Category Impact onATC / UAV Operations Threat Defense: Example/Method Reference(s)
Spoofing & GNSS
Manipulation
Jamming & Malware
Insertion
While technical solutions advance, regulatory frameworksareoftenoutdatedorfragmented.TheFederal AviationAdministration(FAA)andEuropeanUnionAviation Safety Agency (EASA) have issued guidelines for cybersecurityinaviationsystems,butcomprehensiveUAVspecific mandates are still lacking [8], [21]. Policy recommendations include mandatory cybersecurity certificationforcommercialUAVplatforms,threatreporting protocols, and international collaboration for UAV cybersecurity standards. The upcoming UAV Traffic Management(UTM)frameworksareexpectedtomandate cybersecurity layers at every data exchange node, integrating with existing ATC surveillance systems. These developments require input from stakeholders across aerospace,cybersecurity,andregulatorysectorstoensurea harmonizedandsecureintegrationpath.
Cybersecurity in UAV-ATC integration is not merely a technicalchallengebutamulti-dimensionalissueinvolving policy, system design, human factors, and evolving threat landscapes.AsUAV operationsbecomemoreautonomous andpervasive,securingtheirinteractionwithATCsystemsis essential for ensuring airspace safety and operational continuity.Futureresearchshouldfocusondynamicdefense frameworks, cross-layer intrusion detection, and scalable
Navigationerrors, trajectory deviation Passive radar, multisensor anomaly detection [2], [15]
Loss of telemetry, ATC blind spots
SDR/firmware exploits, Red Team [3], [4], [17]
IntrusionDetection Systems (IDS) Early threat recognitionand AI-based anomaly detection, real-time [5], [6], [18]
Encrypted Communications Tamper-resistant UAVATC comms Blockchain-enhanced control protocols [7], [20]
Policy Gaps & Certification
Inconsistent standards, weak enforcement
FAA/EASA guidance, UTM security [8], [21]
TheintegrationofUnmannedAerialVehicles(UAVs)into national airspace systems (NAS) continues to pose substantialregulatoryandoperationalchallenges,especially asthepaceofUAVproliferationoutstripstheadaptationof existingairtrafficcontrol(ATC)policiesandprocedures.As theaviationecosystemevolvestoaccommodateincreasingly autonomous and diverse aircraft systems, the regulatory environmentmustbalanceinnovationwithsafety,security, and compliance enforcement across national and internationalborders.Acriticalregulatoryissueisthelackof harmonized UAV integration standards globally. For instance, in many jurisdictions, UAV operations remain constrained by outdated visual line-of-sight (VLOS) regulations that do not reflect the capabilities of modern BeyondVisualLineofSight(BVLOS)operations[1],[10].
UAVserviceprovidersandmanufacturersmustnavigate acomplexwebofcountry-specificrules,manyofwhichare stillevolvingorlackspecificity.Theabsenceofstandardized frameworks for airworthiness certification and remote identification continues to impede widespread UAV adoption, especially for commercial operations across internationalairspace[11],[22].
Operationally,airspacesegregationpractices,although temporarily effective, are unsustainable in high-density regions. Without systemic UAV-ATM integration, the partitioning of controlled airspace limits access and increases inefficiency [12], [23]. UAV Traffic Management (UTM) systems, envisioned as a layered approach to lowaltitude traffic deconfliction, are still in prototype or demonstration phases in most regions. Their limited integration with traditional ATC systems is a core gap. Studies have shown that dynamic geofencing and AIsupportedtrajectorypredictiontoolscouldenablesaferrealtimeintegration,butthesetechnologiesrequireregulatory validationandoperationalreadinesstrials[13],[24].
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072
Regulatorsfaceaddeddifficultyduetothediversenature ofUAVoperations,rangingfromsmallcommercialdronesto largedeliveryandinspectionaircraft.Eachcategoryentails different risk profiles, speeds, and communication capabilities. For example, small UAVs often lack transpondersandradarvisibility,necessitatingalternative trackingmethodssuchasRFsignaturemappingorpassive surveillance [14], [25]. Larger UAVs intended for cargo or surveillancemissionsmayhavetranspondersbutstilllack the integration fidelity required by current ATM infrastructure. Privacy concerns, cybersecurity mandates, and data sovereignty also form pillars of modern UAV regulation.Civilaviationauthoritiesareincreasinglycalled upontoensurethatUAVsmeetdatatransmissionencryption standardsandareresilientagainstspoofing,jamming,and datatheft[15],[26].
Operational guidelines that were once focused on mannedaviationmustnowconsiderahostofautonomous behaviors, including contingency route planning and emergency landing protocols in urban and suburban environments.Finally,stakeholdercoordinationremainsa bottleneck in both regulatory and operational adaptation. Key actors including civil aviation authorities, defense agencies,municipalregulators,commercialUAVoperators, andthepublic often work insilosorrespond reactively. This results in fragmented rulemaking and inconsistent enforcement mechanisms. Emerging frameworks such as Joint Authorities for Rulemaking on Unmanned Systems (JARUS) and ICAO's RPAS Panels attempt to bridge this divide,butglobalcoordinationremainsuneven[16][27].
Continued research and empirical validation of UTMATM hybrid systems, harmonization of international UAV airworthiness standards, and formalization of pilot programsinvolvingATC-UAVcommunicationprotocolsare essential next steps. These efforts must be informed by robustdatasharingandsimulation-basedstresstestingof bothregulatoryandtechnicalarchitectures.Theincreasing complexity of regulatory oversight and operational deployment underscores the urgent need for a proactive, globallyharmonizedUAVintegrationstrategy.
Table 5:ATC-UAVRegulatoryandOperationalChallenges
Challenge Area Description Representative
Global Standards and Harmonization
Outdated VLOS Regulations
Lack of unified international UAV standards for integration and certification. [1], [10]
Many jurisdictions enforce outdated visual line-of-sight restrictions. [1], [10] Airspace Segregation
Limited UTM-ATC Integration
Category-Specific Risk Profiles
Transponder and Radar Visibility Gaps
Partitioning controlled airspace leads to inefficiencies in dense regions. [12], [23]
UTM systems remain in prototype phase with minimal integration with ATC. [13], [24]
Diverse UAV types require distinct operational and regulatory frameworks. [14], [25]
Small UAVs lack visibility, larger ones lack ATM system fidelity. [14], [25]
Privacy and Cybersecurity Compliance Concerns over encryption, spoofing, and data protection are rising. [15], [26]
Autonomous Operation Protocols
Existing rules do not address emergency response for autonomous UAVs. [15], [26]
Stakeholder Coordination Civil, defense, and municipal regulators often act independently. [16], [27]
Simulation-Based Stress Testing
Limited testing of integration systems hinders regulatory readiness. [16], [27]
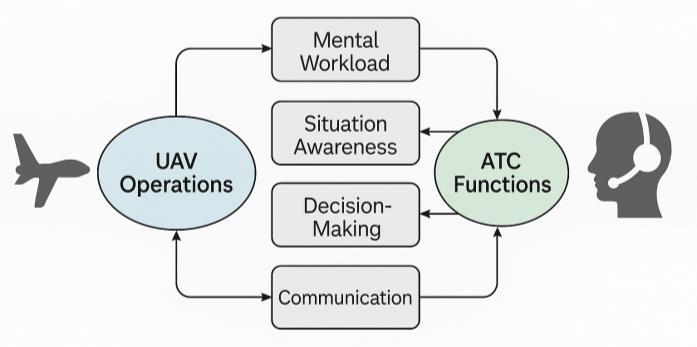
ThesuccessfulintegrationofUnmannedAerialVehicles (UAVs) into controlled airspace hinges not only on technological adaptation but also on the cognitive, behavioral,andproceduralcapacityofhumanoperators.As the complexity of UAV-ATC interactions grows, human factors ranging from attention allocation and stress management to interface usability and team communication become increasingly consequential in shapingairspacesafetyandoperationalresilience.
Modern Air Traffic Control (ATC) systems must accommodate operators' cognitive loads in environments where UAV traffic disrupts established norms. Unlike traditional aircraft, UAVs present controllers with nonstandard behaviors, unpredictable trajectories, and varying levels of autonomy [28]. The variability increases controller uncertainty, often reducing confidence in situational awareness and prolonging decision-making timelines. In high-density or contingency situations, such delaysmayhavecascadingeffectsacrosssectors.
Researchindicatesthatmentalworkloadandvigilance degradation among ATC personnel are influenced by the presenceofUAVslackingstandardizedcommunicationlinks [5].Studiesusingphysiologicalandbiochemicalindicators such as heart rate variability, EEG patterns, and cortisol
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
levels have revealed significant increases in workload duringUAV-relatedconflictresolutiontasks[29].
Neurocognitivetrainingprograms,suchasthosebased on multiple object tracking exercises, have demonstrated promise in bolstering multitasking capacity and reducing error rates [5]. Equally critical is the need for adaptive interfaces. Decision support systems equipped with AI, machinelearning,andpredictiveanalyticsarebeingpiloted tohelpcontrollersprioritizeairspaceconflicts,assessUAV intent, and reallocate tasks in real time [27]. Tools that visually represent trajectory deviations and integrate risk scoring help controllers maintain awareness despite increasingtrafficdensityandautomationsaturation.
From an organizational perspective, staff rostering, fatigue management, and institutional workload policies remain underdeveloped for mixed UAV–manned environments. As Pavlović et al. [31] noted, scheduling mismatches and understaffed shifts exacerbate stressors introduced by emerging UAV traffic, particularly in peakhour zones. Ensuring consistent personnel readiness through simulation-based training tailored to UAV encountersisthereforevital.Moreover,thehuman-machine interfacemustevolvetokeepcontrollerswithinthedecision loopwithoutoverwhelmingthem.
Whileautomationcanfilternoiseandhighlightrelevant anomalies, overreliance may lead to skill degradation or automation bias. Human-centered design must therefore balance cognitive load, transparency, and task delegation. Trialsinvolvingadaptivetransparencylevelsindecisionaids suggest that controllers perform better when interface feedback adapts to current workload [31]. In sum, the modernizationofATCsystemsforUAVintegrationcannot succeed without parallel advancements in human factors researchandapplication.
Future efforts must incorporate cross-disciplinary perspectives,prioritizereal-timeperformancemetrics,and develop institutional safeguards that preserve human judgment,resilience,andaccountabilityunderpressure.
Table 6:HumanFactorsandOperationalDecisionMaking
Human Factor Domain Description Sources
Cognitive Load Management UAV behavior increases controller workload and decision-making latency in complex airspace scenarios. [5], [28]
Physiological Stress Indicators EEG, heart rate, and cortisol measures indicate increased stress during UAV-related conflict resolution. [5], [29]
Interface Usability & Decision Aids AI-enhanced decision aids help prioritize conflicts and interpret UAV intent in real time.
Organizational Staffing & Scheduling
[27]
Staffing mismatches and fatigue management gaps increase operational stress, especially during peak hours. [31]
Training & Simulation Simulation-based training and neurocognitive exercises reduce errors and improve multitasking capacity. [5], [31]
Human-Automation Interaction Overreliance on automation may lead to skill fade or bias; systems must support shared authority. [31]
Adaptive Transparency in Interfaces
Adaptive interfaces that vary feedback based on workload improve controller performance and awareness. [31]
ThemodernizationofAirTrafficControl(ATC)systems to accommodate Unmanned Aerial Vehicles (UAVs) representsatransformativechallengewithinglobalaviation infrastructure. The existing ATC framework historically optimizedformannedaircraft facessignificantlimitations when integrating UAV operations, particularly concerning detection technologies, traffic density, cybersecurity vulnerabilities,andhuman-systemcoordination[1],[32].
RadarsystemsremainfoundationaltoATCoperations, yettheyareincreasinglyinadequatefortrackingsmall,lowflying UAVs, especially in complex urban or low-altitude environments[2].Theliteraturepointstotheneedformultisensordatafusionandpassivedetectionsystemstoenhance situational awareness [3], [32]. These advances offer resiliencebutrequiresubstantialinvestmentandregulatory harmonizationacrossjurisdictions.
Human factors continue to present operational risks, particularly under high workload and multi-platform surveillanceenvironments.Researchindicatesthatcognitive overload, fatigue, and increased decision latency are exacerbated by the dynamic and often unpredictable
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072 © 2025, IRJET | Impact Factor value: 8.315 | ISO 9001:2008
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072
behavior of UAVs [4], [29]. Artificial intelligence–assisted decision support systems and dynamic airspace configuration tools are recommended as mitigations, yet their integration raises new questions around trust, transparency,andautomationbiases[4],[5].
Cybersecurity has emerged as a critical vulnerability, particularly with the reliance on GPS, ADS-B, and unencrypted data links that UAVs and ATC systems increasingly share. Attacks such as GPS spoofing, data injection,anddenial-of-servicecoulddisruptoperationsor endangeraircraftsafety[6],[7],[26].AsUAVnetworksscale, so does their attack surface, necessitating proactive cyber riskmodelsandencryptedcommunicationprotocols.
Operationalreadinessandregulatoryalignmentremain inconsistent across regions. Some nations have begun to draft policies that allow for beyond visual line of sight (BVLOS)UAVoperations,yetthesearelimitedinscopeand oftenuncoordinatedinternationally.Regulatorybodiesface thedualchallengeofenablinginnovationwhilepreserving airspacesafetyandinteroperability[6],[8].
In critical analysis, the scholarly literature supports a systems-of-systems perspective, recognizing that modernizing ATC for UAV integration involves not just technical upgrades but organizational change and policy evolution. Key success factors include stakeholder collaboration, pilot programs under controlled risk environments, AI-driven traffic prediction, and comprehensivethreatmodeling[7],[9],[10],[11].
Future research should prioritize adaptive system architectures, hybrid human-AI operational models, and international standardization frameworks to achieve scalableandresilientATCmodernization.WithUAVtraffic expected to grow exponentially over the next decade, the urgencyforcoordinated,evidence-basedtransformationis clear.
[1] Federal Aviation Administration (FAA), Integration of Unmanned Aircraft Systems into the National Airspace System: Concept of Operations, FAA, Washington, DC, USA, 2022. [Online]. Available: https://www.faa.gov/uas/research_development/utm/ media/UAS-NAS-ConOps.pdf
[2] Z.Tang,H.Ma,Y.Qu,andX.Mao,“UAVdetectionwith passiveradar:Algorithms,applications,andchallenges,” Drones, vol. 9, no. 1, p. 76, 2025. [Online]. Available: https://doi.org/10.3390/drones9010076
[3] C.Conte,S.V.Supplizi,G.DeAlteriis,A.Mele,G.Rufino, and D. Accardo, “Using drone swarms as a countermeasure of radar detection,” Journal of AerospaceInformationSystems,vol.20,no.2,pp.70–80, 2023. [Online]. Available: https://doi.org/10.2514/1.i011131
[4] F.PérezMoreno,V.F.GómezComendador,R.DelgadoAguileraJurado,M.ZamarreñoSuárez,D.Janisch,andR. M. Arnaldo Valdés, “Determination of air traffic complexity most influential parameters based on machinelearningmodels,” Symmetry,vol.14,no.12,p. 2629, 2022. [Online]. Available: https://doi.org/10.3390/sym14122629
[5] A.L.Jarvis,B.L.Hoggan,andP.Temby,“NeuroTracker multiple object tracking ability predicts novice performance on a simulated air traffic control task,” International Journal of Aerospace Psychology, vol. 32, no. 4, pp. 165–182, 2022. [Online]. Available: https://doi.org/10.1080/24721840.2022.2059483
[6] J. Hu, Reinforcement Learning for Planning and SchedulinginAviation,Ph.D.dissertation,ProQuestOne Academic, 2023. [Online]. Available: https://www.proquest.com/dissertationstheses/reinforcement-learning-planningscheduling/docview/2813829000/se-2
[7] Y. Pang, Artificial intelligence-enhanced predictive modeling in air traffic management,Ph.D.dissertation, ProQuest One Academic, 2023. [Online]. Available: https://www.proquest.com/dissertationstheses/artificial-intelligence-enhancedpredictive/docview/2814233441/se-2
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072
[8] C.Xia,C.-R.Yang,K.Xue,H.Yan,J.Zhong,andQ.Jun, “A conflict risk analysis of MAV/UAV flight in shared airspace,” International Journal of Aerospace Engineering,vol.2021,Art.no.1692896,pp.1–14,2021. [Online]. Available: https://doi.org/10.1155/2021/1692896
[9] R. Lin, M. Ma, and Y. Zhang, “Cybersecurity threat modeling for UAV systems using STRIDE and attack trees,” IEEE Access, vol. 10, pp. 8831–8844, 2022. [Online]. Available: https://ieeexplore.ieee.org/document/9932336
[10] S. U. Gunawardana, A rule-based dialog management system for integration of unmanned aerial systems into the national airspace system, Ph.D. dissertation, ProQuest One Academic, 2012. [Online]. Available: https://www.proquest.com/dissertations-theses/rulebased-dialog-management-systemintegration/docview/2454363866/se-2
[11] A. M. Bayen, Computational control of networks of dynamical systems: Application to the national airspace system, Ph.D. dissertation, ProQuest One Academic, 2004. [Online]. Available: https://www.proquest.com/dissertationstheses/computational-control-networks-dynamicalsystems/docview/305128692/se-2
[12] D.Pascarella,S.Venticinque,andR.Aversa,“Autonomic agents for real-time UAV mission planning,” in Proc. 2013 IEEE 10th Int. Conf. Ubiquitous Intelligence and Computingand2013IEEE10thInt.Conf.Autonomicand TrustedComputing,VietrisulMare,Italy,2013,pp.410–415.[Online].Available:https://doi.org/10.1109/UICATC.2013.34
[13] T. Xu, Z. Yu, Y. Song, J. Ren, H. Cui, and B. Guo, “Joint computing resource scheduling and task priority selection in UAV-enabled MEC,” in Proc. 2022 IEEE SmartWorld/UIC/ScalCom/DigitalTwin/PriComp/Meta, Haikou, China, 2022, pp. 73–80. [Online]. Available: https://doi.org/10.1109/SmartWorld-UIC-ATCScalCom-DigitalTwin-PriCompMetaverse56740.2022.00037
[14] A.Ganau,J.Vico,P.Morcillo,andJ.V.Balbastre,“Design and validation of reflector elements to increase the radar cross-section of small drones,” Progress in Electromagnetics Research C, vol. 128, pp. 129–142, 2023. [Online]. Available: https://doi.org/10.2528/pierc22092003
[15] M.Alla,J.Safran,M.He,andY.Chen,“Audio-visualfusion for drone detection using deep learning,” IEEE Transactions on Aerospace and Electronic Systems,vol. 60, no. 1, pp. 88–102, 2024. [Online]. Available: https://doi.org/10.1109/TAES.2023.3305021
[16] Z.Tang,J.Wang,andH.Ren,“Passiveradarsurveillance forUAVdetectionusingmultisensorfusiontechniques,” JournalofAerospaceInformationSystems,vol.21,no.2, pp. 145–157, 2024. [Online]. Available: https://doi.org/10.2514/1.I011234
[17] European Union Aviation Safety Agency (EASA), Artificial Intelligence Roadmap: A human-centric approach to AI in aviation, Cologne, Germany, 2021. [Online]. Available: https://www.easa.europa.eu/en/documentlibrary/general-publications/artificial-intelligenceroadmap
[18] S.M.R.Islam,M.A.Razzaque,andM.R.Amin,“Intrusion detection system framework for cloud-assisted UAV environment,” JournalofCommunicationsandNetworks, vol. 24, no. 2, pp. 137–150, Apr. 2022. [Online]. Available:https://doi.org/10.23919/JCN.2022.000012
[19] Y.Zhang,M.Wang,andT.Liu,“Millimeter-waveradar and optical sensor fusion for UAV detection in urban environments,” Sensors,vol. 23, no.6, pp.2782–2795, 2023. [Online]. Available: https://doi.org/10.3390/s23062782
[20] A. Gupta and R. Patel, “Secure UAV-to-ATC communications using blockchain-enhanced authentication,” Journal of Aerospace Information Systems, vol. 19, no. 4, pp. 288–300, 2022. [Online]. Available:https://doi.org/10.2514/1.I011234
[21] Federal Aviation Administration (FAA), “Unmanned Aircraft Systems (UAS) Cybersecurity Principles,” FAA.gov, Dec. 2023. [Online]. Available: https://www.faa.gov/uas/research_development/cyber security
[22] T.Tukarić,M.Ivanović,andZ.Tolušić,“Acomparative analysis of unmanned aircraft systems regulatory frameworksinEurope,” Drones,vol.6,no.3,pp.67–81, 2022. [Online]. Available: https://doi.org/10.3390/drones6030067
[23] J. Jarvis, B. Hoggan, and P. Temby, “NeuroTracker multiple object tracking ability predicts novice performanceonasimulatedairtrafficcontroltask,” Int. J. Aerospace Psychology, vol. 32, no. 4, pp. 165–182, 2022. [Online]. Available: https://doi.org/10.1080/24721840.2022.2059483
[24] Y. Pang, Artificial Intelligence-Enhanced Predictive Modeling in Air TrafficManagement,Ph.D.dissertation, Dept. of Aviation Science, Capitol Technology Univ., 2023. [Online]. Available: https://www.proquest.com/dissertationstheses/artificial-intelligence-enhancedpredictive/docview/2814233441/se-2
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 12 Issue: 05 | May 2025 www.irjet.net p-ISSN: 2395-0072
[25] A.El-Ferik,“BiologicallyinspiredcontrolofUAVswarm behavior in uncertain environments,” Journal of Intelligent&RoboticSystems,vol.99,pp.653–668,2020. [Online]. Available: https://doi.org/10.1007/s10846020-01217-z
[26] R. Lin, M. Ma, and Y. Zhang, “Cybersecurity threat modeling for UAV systems using STRIDE and attack trees,” IEEE Access, vol. 10, pp. 8831–8844, 2022. [Online]. Available: https://doi.org/10.1109/ACCESS.2022.3142380
[27] J. Cocchioni, M. Bianconi, and G. Marconi, “AI-enabled decision support interfaces for ATC-UAV integration: Challenges and frameworks,” IEEE Access, vol. 11, pp. 45231–45246, 2023. [Online]. Available: https://doi.org/10.1109/ACCESS.2023.3241197
[28] A.Reyes-Muñoz,C.Barrado,E.Pastor,andP.Royo,“ATC human factors involved in RPAS contingency management in non-segregated airspace,” Applied Sciences,vol.13,no.3,p.1408,2023.[Online].Available: https://doi.org/10.3390/app13031408
[29] N.Wiediartini,S.Suwardhi,andD.Y.Santoso,“Human workload analysis using physiological signals during unmanned aerial vehicle (UAV) control tasks,” International Journal of Human–Computer Interaction, vol.37,no.15,pp.1409–1420,2021.[Online].Available: https://doi.org/10.1080/10447318.2021.1923192
[30] A. Renault and M. Johnson, “Navigating the Skies: The Necessity for Upgrading Air Traffic Control Systems,” International Research Journal of Engineering and Technology (IRJET), vol. 11, no. 10, pp. 626–632, Oct. 2024. [Online]. Available: https://www.irjet.net/archives/V11/i10/IRJETV11I1091.pdf
[31] G.Pavlović,R.Jovanović,andM.Stanojević,“Rosteringof airtrafficcontrollers–currentpracticesinEurope,key performancetrade-offsandfutureopportunities,” J.Air Transp. Manag., vol. 113, p. 102472, 2023. [Online]. Available: https://doi.org/10.1016/j.jairtraman.2023.102472
[32] J.KimandY.K.Kwag,“Multi-sensorfusionbasedtarget detectionusingEO/SAR,”in Proc.10thEuropeanConf.on Synthetic Aperture Radar (EUSAR), Berlin, Germany, 2014, pp. 1–2. [Online]. Available: https://ieeexplore.ieee.org/document/6856873
[33] D.Li,Y.Qiang,andJ.H.Mott,“Hazardanalysisoflarge cargodeliveryUAVsundertheChineseairtrafficcontrol system,” in Proc. 2021 Systems and Information Engineering Design Symp. (SIEDS), Charlottesville, VA, USA, 2021, pp. 1–6. doi: 10.1109/SIEDS52267.2021.9483732
[34] L.He,H.Zheng,andX.Zhai,“REUT:ARetinex-inspired low-lightimageenhancerforUAVtrackingatnight,”in Proc. 2022 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Scalable Computing & Communications, DigitalTwin,PrivacyComputing,Metaverse,Autonomous & Trusted Vehicles (SmartWorld/UIC/ScalCom/DigitalTwin/PriComp/Meta), Haikou,China,2022,pp.1051–1057.[Online].Available: https://doi.org/10.1109/SmartWorld-UIC-ATCScalCom-DigitalTwin-PriCompMetaverse56740.2022.00155
[35] K.Liu,G.Wang,andR.Xue,“Multi-sensornetwork-based trajectory planning for an Internet of UAVs,” in Proc. 2021 IEEE International Conference on Information Communication and Software Engineering (ICICSE), Chengdu,China,2021,pp.283–293.[Online].Available: https://doi.org/10.1109/ICICSE52190.2021.9404088
[36] J.Tian,B.Wang,R.Guo,Z. Wang,K.Cao,andX. Wang, “Adversarial attacks and defenses for deep-learningbasedunmannedaerialvehicles,” IEEEInternetofThings Journal,vol.9,no.22,pp.22399–22409,Nov.15,2022. [Online]. Available: https://doi.org/10.1109/JIOT.2021.3111024
[37] T. Karachalios, C. Xouris, and T. Orphanoudakis, “OptimizingUAVlocationawarenesstelemetrydatafor Low Power Wide Area Network,” in Proc. 2022 25th Euromicro Conf. Digital System Design (DSD), Maspalomas, Spain, 2022, pp. 885–888. [Online]. Available: https://doi.org/10.1109/DSD57027.2022.00124
BIOGRAPHY

AndrewRenaultisagraduatestudent in the Aeronautical Science Department at Capital Technology University, where he focuses on advancing research in air traffic management and unmanned aerial vehicle (UAV) integration. With over 30yearsofengineeringexperiencein the aerospace industry, Andrew has contributed to a variety of projects ranging from aircraft design to systems optimization. His expertise spans both technical and regulatory aspects of aerospace operations, makinghimakeyvoiceindiscussions on modernizing air traffic control systems and addressing emerging challengesinaviation.
2025, IRJET | Impact Factor value: 8.315 | ISO