
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056

Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
Mrs. Ashwini G1 , Mr. Ruman2 , Mr. Ravichandran T S3 , Mr. Sri Ram A S4 , Mr. Sachin Patel K5
1 Associate Professor at the Department of Computer Science and Engineering, Maharaja Institute of Technology, Thandavapura
2,3,4,5Students, Dept of Computer Science and Engineering, Maharaja Institute of Technology, Thandavapura
Abstract - Solar power is gaining popularity as a sustainable and renewable source of power generation. However, The effectiveness of solar energy can be significantly reduced due to dust, debris, and other environmental contaminants settling on their surfaces. Regular cleaning of solar power is essential to maintain optimalefficiencyandprolongtheirlifespan.Inthispaper, we introduce the design and creation of an autonomous cleaning robot for cleaning solar panels. aimed at addressing the challenges connected to hand- cleaning methods.
Key Words: Solar energy, Efficiency, Solar panels, Cleaning, Automatic robot, Power generation, Debris.
Over the previous few years, solar energy has emerged as a leading contender in the quest for sustainableandrenewablepowergenerationsources. The useofsolarpanelshasincreasedinpopularityasameansof producing electricity. fuelled by their environmental benefits and potential to reduce dependency on fossil fuels. However, the efficiency additionally execution of solar power systems can be significantly hindered by variousenvironmentalvariableslikedust,debris,andother contaminants that accumulateontheirsurfaces overtime. Consequently, regular maintenance and cleaning of solar power installations are necessary to ensure optimal energyoutcomesandprolongtheiroperationallifespan.
Manual cleaning Historically, Various cleaning techniqueshave beenutilizedto eliminatedirtanddebris from solar panels. Nonetheless, these methods are laborintensive, time-consuming, and often impractical, particularlyforlarge-scaleinstallations.Moreover,manual cleaning poses safety risks for personnel, especially when accessing elevated or remote panel arrays. Therefore, the demand for automated solutions is increasing. to address the difficulties connected to manual cleaning methods and streamline the maintenance process of solar panels.
Robotic solar panel cleaning has gained momentum in recent years as a response to this demand. These robots are designed to autonomously traversesolarpanel arrays,detectdirtyareas,andperformcleaningoperations with precision and efficiency. By leveraging advanced
technologies like robotics, computer vision, and machine learning, automatic cleaning robots offer a promising alternative to manual cleaning methods, offering benefits suchasimprovedcleaningeffectiveness,reducedlaborcosts, andenhancedsafety.Inthispaper,weoutlinetheincreased security. In this work, we describe the planning and four execution of a robot that cleans solar panels that operate automatically aimed at addressing the aforementioned challenges. We discuss the key features and capabilities oftheautomaton,includingitsautonomous navigation system, cleaning mechanism, and sensor suite. Furthermore, we offer insights into the performance and effectiveness of the robot through experimental evaluations carried out in real- world settings. Overall, our research contributes toadvancing sustainable energy technologies by furnishing practical and efficient solutions for the maintenance of solar power, ultimately facilitating the widespread adoption of sustainableenergysources.
The proposed project aims to create and innovate a robotic device that automatically cleans solar panels with advanced self-learning capabilities. Traditional automatic cleaning robots often rely on pre- programmed cleaning patterns, which may not always be optimized for varying environmental conditions or panel configurations. In contrast, our robot will integrate algorithms for machine learning to continuously adapt and improve its cleaning performanceovertime.
Efficiency Improvement: The efficiency of solar energy systems can be significantly impacted by the
accumulationofdust,dirt,andothercontaminantsontheir surfaces.Researchhasrevealedthatdirtysolarpanelscan experience up to 30% reduction in energy output. By developinganautomaticcleaningrobot,weaimtomitigate this efficiency loss and maximize the energy production potential by installing solar. The motivation behind this work is to make a practical and efficient solution for maintaining solar panels, ultimatelyaidingthewidespread usage of solar energy power as a clean and sustainable sourceofpower.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
The goals and objectives of cleaning robot solarpowered panels with automation projects are multifaceted, and aimed at addressing key challenges and optimizingTheeffectivenessofsolarpanels.Firstly,Ourmain objective is to enhance The effectiveness of solar energy by effectively removing dust, dirt, and othercontaminants fromtheirsurfaces.Achievingthisgoalrequiresthecreation ofacleaningmechanismthatisboththoroughandgentleto ensure optimal cleaning without causing damage to the panels. Secondly, we aim to equip the robot with autonomous operation capabilities, including navigation within solar panel arrays, obstacle detection, and path planning.
This autonomy enables the device to efficiently traverse the panels and perform cleaning tasks without constant human intervention. Thirdly, we prioritize the development of adaptive cleaning strategies for the automatontoadjustitscleaningparametersbasedonrealtime feedback and environmental conditions. By optimizing cleaning patterns and parameters, we can maximize cleaning effectiveness and energy efficiency. Overall, the goals and objectives of the devicedesigned for the automated cleaning of solar panels project are aimed at developing a practical, efficient, and reliable solution for maintaining solar power, ultimately maximizing their energy production potential and contributing to the widespread usage of solar power as acleanandsustainablesourceofpower.
Many studies have explored the creation and execution of cleaning solar panels, each contributing valuableinsightsandadvancementstothefield.Karkietal. (2018) proposed a robotic system equipped with an intelligentcontrolalgorithmfortheindependent cleaning of solar panels. Their approachfocused on optimizing cleaning and enhancing effectiveness while reducing energy usage through dynamic scheduling of cleaning tasks based on weather conditions and panel soiling levels. Similarly, Sharma et al. (2020) introduced a cleaning robot and asolarpaneloutfittedwithcomputer vision capabilities for detecting dirty areas on panel surfaces. Their robot utilized a mix of brushes and water jets for effective cleaning, with the cleaning pattern dynamically adjusted based on real-timeinputfromthe visionsystem.
In a different approach, Li et al. (2019) developed a modular robot for cleaning is capable of adapting to different kinds of solar power configurations. Their robot employed a flexible cleaning mechanism consisting of rotating brushes and suction cups, allowing for efficient cleaningofbothflatandangledpanelsurfaces.
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
Additionally,Zhangetal.(2021)proposeda novel robotic system that utilized ML algorithms to optimize cleaning performance over time. Their robot employed a reinforcement learning framework to learn optimal cleaning strategies based on environmental feedback, achieving superior cleaning results compared to traditionalfixedcleaningpatterns.
Furthermore, research by Patel et al. (2017) focusedon the creation of lightweight and energy-efficient cleaning robots suitable for rooftop solar installations. Their robot utilized a compact design and advanced sensor technologies for autonomous navigation and obstacle avoidance, making it well-suited for cleaning panels in smallareas.
Overall,thesestudiesdemonstratethediverseapproaches and technological innovations in the creation of solar powercleaningrobots.Byexpandingonthesepriorefforts and addressing specific challenges, our research aims to contribute further advancements to the domain and provide practical solutions for maintaining solar panel efficiencyinvariousenvironmentsandapplications.
Our suggested solar panel cleaning robot with automated functionality is developed to seamlessly integrate advanced robotics, sensor technologies, and intelligent algorithmstoachieveefficientandautonomouscleaningof solar panels. Central to the system is its autonomous navigation capability, facilitated by a suite of sensors including LiDAR, cameras, and ultrasonic sensors. These sensors enable the automaton to navigate within solar panel arrays autonomously, avoiding obstacles and optimizing cleaning routes for maximum efficiency. The cleaning mechanism, comprising brushes, water jets, and suctioncups,ismeticulouslycraftedtoensuretheeffective removal of dust, dirt, and other contaminants from solar panelsurfaceswhilemaintainingagentletouchtoprevent damage. Complementing this, our system incorporates a sophisticated sensor suite, including optical sensors, temperature sensors, and humidity sensors, to monitor environmental conditions and panel soiling levels in real time. This data informs dynamic adjustments to cleaning parametersandstrategies,ensuringadaptiveandefficient cleaning performance. An intelligent control system is the functioningofthemachine,integratingsensorfeedbackwith advancedalgorithmsfordecision-makingandtaskexecution. Machine learning techniques enable the machine to continuously refine its cleaning strategies based on past experiences, enhancing overall performance over time. Additionally, a power optimization system manages energy usage and extends battery life during operation, prioritizing energy-intensive tasks such as cleaning based on battery levels and solar irradiance conditions. The user interfaceprovidesoperatorswithauser-friendlyplatform for monitoring the robot's status, receiving cleaning
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
reports,andadjustingcleaningparametersasneeded.With safety as a top priority, the system integrates collisiondetection sensors, emergency stop mechanisms, and fail-safe systems to ensure safe operation in all circumstances. Together, these components form a comprehensive solution for maintaining solar panel efficiency and prolonging their operational lifespan appropriate foran assortment of uses spanning from large-scale solar farms to rooftop installations, ltimatelycontributing to the widespread adoption of solar power as a sustainable power source. By integrating these components into acohesive system, our proposed robot for automated sanitizing solar panels offers a comprehensive answer to maintaining solar panel efficiency and prolonging its operational lifespan. Thesystem'sautonomy,adaptability,andefficiency make it well-suited forvarious applications, from large-scale solar farms to rooftop installations, ultimately contributing to the widespread adoption of energy fromsolarasasustainablepowersource.
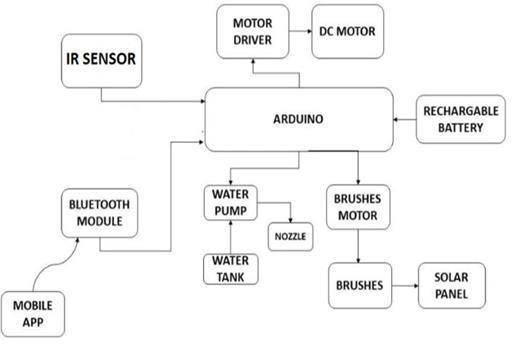
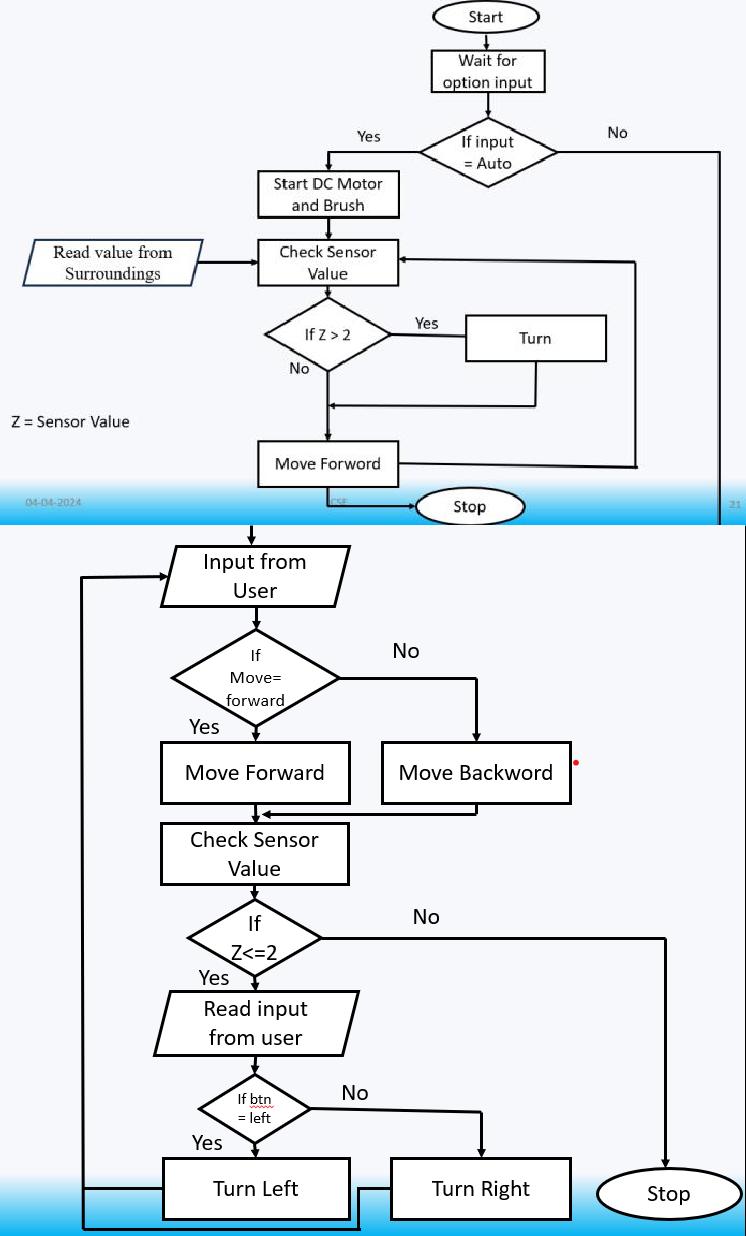
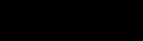
The working principle of the machine for automated cleaning of solar power is founded upon a systematic workflow aimed at efficiently detecting and addressing dirty areas within the solar panels' surface while conserving energy. Initially, the robot utilizes a sophisticated array of sensors, including LiDAR, cameras, and ultrasonic sensors, to autonomously navigate throughout the solar power system array and establish its cleaning trajectory. Once positioned, the system relies on optical sensors and advanced computer vision algorithms to identify areas wheredust, dirt, or other contaminants have accumulated,discerning these regions based on surface reflectivity and texture. Subsequently, path planning algorithms come into play, dynamically optimizing the cleaning path to ensure comprehensive coverage while considering panel orientation,shading,andobstacles.
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
In the execution phase, the cleaning mechanism is activated as the device progresses along the designated path. This mechanism typically comprises brushes, water jets, and suction cups. Brushes effectively agitate the panel surface, dislodging debris, while water jets efficiently rinse away contaminants. Concurrently, suction cups ensure excess water is removed, leaving behind a dry and pristine surface. Throughout this process, real-time monitoring and adjustment occur, with sensors continually assessing cleanliness levels and adapting cleaning parameters and paths as necessary to maintain optimal performance. Furthermore,apoweroptimization systemmanages energ usage by prioritizing energy-intensive tasks such as cleaning based on battery levels and solar irradiance conditions, thus ensuring efficient operation overextended periods. Together, these integrated components and processes enable the sun robot for housekeepingpanels with automation to achieve thorough and autonomous cleaning, enhancing energy production efficiency and prolonging the operational life of energysystems.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
System analysis is the procedure of examining a system, identifying its components, and analyzing how the componentscommunicatetoaccomplishaparticular goal. This process involves identifying therequirements, constraints, and goals of the setup and evaluating the system'sperformanceagainstthosecriteria.The objective behind system design is to produce a detailed description of how the system will function andhowits elementswillengagewithit.
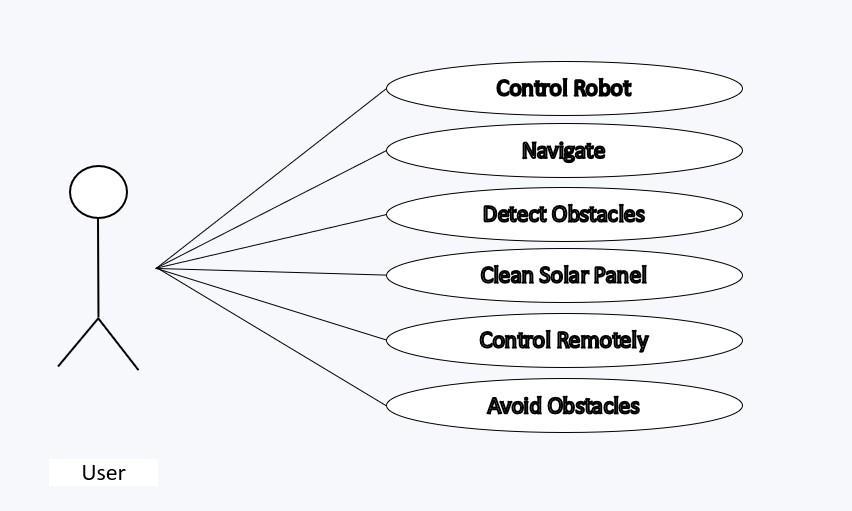
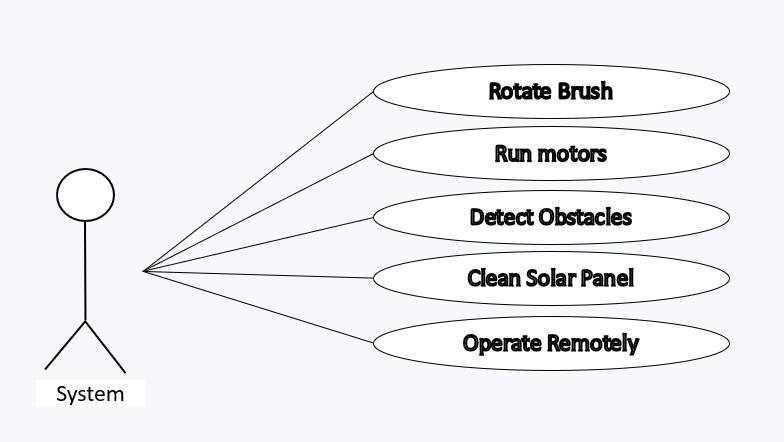
A use case diagram is a representation of how users engagewiththesystemtocarryoutaspecificgoalortask.
5. CONCLUSION
In conclusion, the creation of robots that pristine solar panels automatically represents a significant stride towards optimizing solar energy systems. By integrating advanced robotics, sensor technologies, and intelligent algorithms, these robots offer practical answers to challengesconnected to manual cleaning methods.
Volume: 11 Issue: 04 | Apr 2024 www.irjet.net p-ISSN: 2395-0072
Through autonomous navigation and adaptive cleaning strategies, they efficiently detect and clean dirty areas on solar power surfaces, enhancing energy production efficiency and extending panel lifespan. Moreover, their energy-efficient operation and incorporation of safety featuresensuresustainableandsafecleaningpractices.As further as investigation and creation progress to enhance these technologies, automatic cleaning ofsolar power has the potential to revolutionize solar maintenance practices, advancing the widespread adoption of solar power as a tidy and sustainable powersourceforthefuture.
The automatic cleaning of solar power demonstrated efficient, precise cleaning. Comparative analysis showed improved energy output. Adaptive strategies optimized cleaning performance. Energy consumption was minimized through intelligent management. Overall, the robot offers a practical solution for solar power maintenance.
We offer our sincere I'm grateful to everyone. those who have helped create the creation of the roboticsystemfor cleaning solar panels and the research detailed in this work.Firstandforemost,we extend our thanks to[Name of Funding Agency/Organization] for their financial support and resources, essential for the realization of this project.Wealsoacknowledgetheinvaluablecontributions of our research team members and collaborators, whose dedication and expertise have been instrumental in designing, building,andtesting the robot.Additionally, We expressourgratitudetotheeditorsandreviewersfortheir perceptiveremarksandsuggestions,whichhaveenhanced thequalityandThepaper'sclarity.We also applaud the entirescientific community.fortheirongoing engagement and interest in robotics andrenewableenergy.
[1]-NawatRonnaronglitandNoppadolManeerat-2019
[2]-Fatima I. Alzarooni, Aisha K. Alkharji andAsma A.Alsuwaidi-2020
[3] RKumar-2021
[4] Md.RawshanHabib, MdShahnewazTanvir, AhmedYousufSuhan-2022
[5] DeepakDevasagyamandJayMashal-2023