Abstract
Fencing is currently one of the most successful sports in Estonia. To date, fencing analysis is conducted only manually in this country.
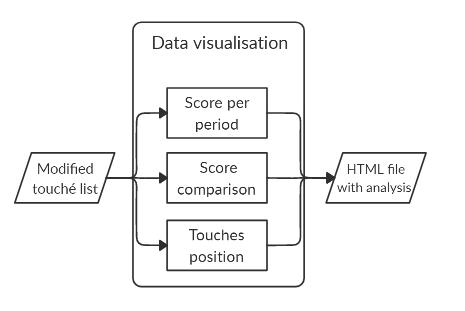
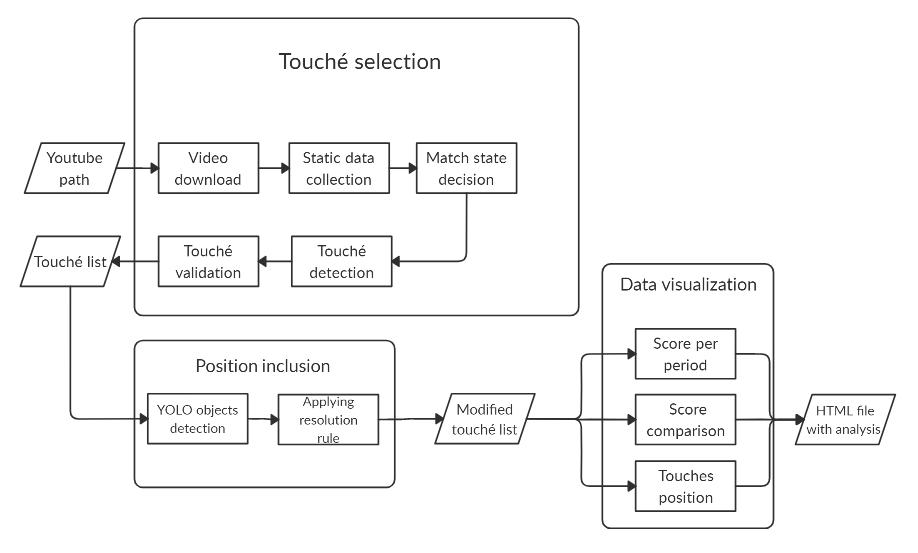
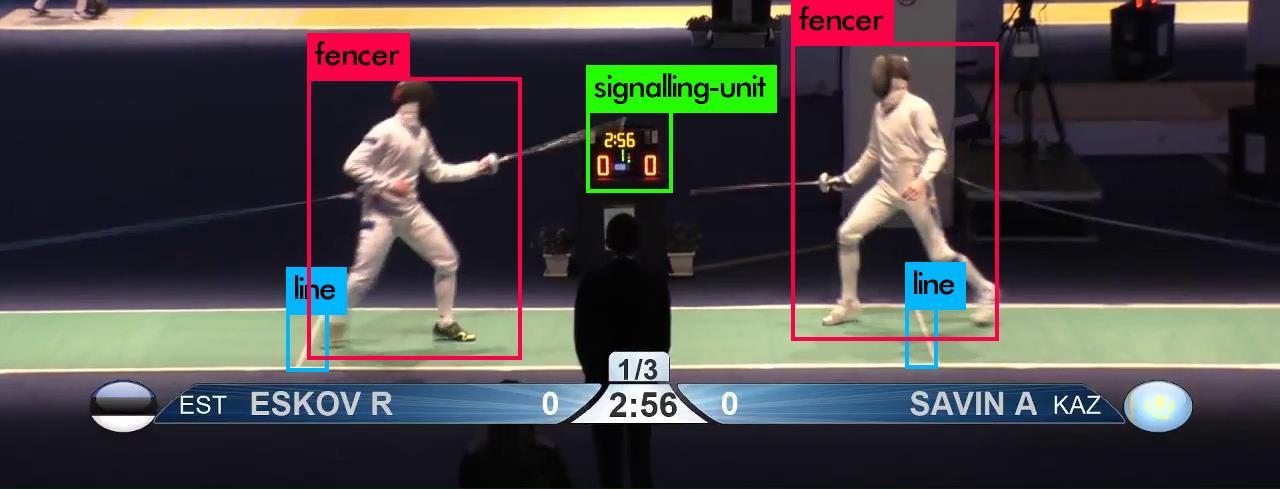
The main goal of this thesis is to develop software capable of calculating the statistics of a bout based on the analysis of a video document. The processed video should use Fencing Vision technology for its data visualisation. As a result, the software should be able to recognise information about fencers, such as their names and the abbreviations of countries. Information about valid touchés should also be identified. The software should also be able to create an output file with all the captured data. The current thesis is different to other research on same theme because none of these have analysed videos directly from YouTube.
This thesis reports on the creation of a software solution for analysing an epee bout. This software accesses a YouTube fencing video and downloads the video. It then reads information about the fencers from the video, finds all touche