2023
2015-21
WTIAU Bachelor of Architectural Engineering
West Tehran Islamic Azad University, Tehran, Iran
2017-18
2020-22
EDUCATIONAL Experience
IAC Artificial Intelligence for architects
Iran Architecture Center, Tehran, Iran
CAAI Rethinking Modularities
2021 Exhibition of students’ projects, CAAI
Publication
Exhibition ACADIA 2022
2022
Collabrators Ariyan Hakimi Curator
2022 Drawing Codes Volume III, CCA
Parametric House
Homa Hassani,Amir Hossein Khazaei, Maryam Varshochi
Features experimental drawings by 24 architects who explore the impact of new technologies on the relationship between code and drawing: how rules and constraints inform the ways we document, analyze, represent, and design the built environment.
English California Collage of Art, San Francisco, CA Andrew Kudless & Adam Marcus transLAB Borhani, Kalantar, Kolij Location
Collabrators
Hybrids & Haecceities
A new Approach to integrating geometry, materials & acoustics to build Invisibles
Title
Location Collabrators Paper
Skills Illustration Rendering 3DModelling Programming
of Pennsylvania, Philadelphia, PA

Keyshot Houdini C # Arduino After Effects
Indesign Lumion Rhinoceros Grasshopper Unity
Aiming to re-define our basic understanding of patterns, re-discovering possibilities and expanding the rational capacity of complex geometries in which it investigates the overlap between various design disciplines such as (Architecture, Fashion, Interior design) Illustrator Processing
Photoshop Python
https://youtu.be/5ucA59R0AsI
https://www.youtube.com/watch?v=wUo_D9LPMWw https://www.youtube.com/watch?v=AQP0FVyQ7rc&t=1s
GRASSHOPPER PLUGINS
https://www.food4rhino.com/en/app/stella3d https://parametrichouse.com/stella3d/ https://www.youtube.com/watch?v=FUM6C0tiXzE MinMash 2022
Parametric House
An Agent based Grasshopper Plugin based on C# which simulates particles behaviour in custom enironments with more than 8000 downloads on Food4Rhino.
Parametric House
2022
2021
and Origami systems through repetitive network
for
Kirigami
Parametric House
A Plugin aimed to capture animation inside Grasshopper, due to recording sliders value in a specific time frame
Greenville 3D-Printed Pedestrain Bridge
Collabrators
Scripts 2018-21 Greenville, South Carolina
Location
transLAB, Perkins & Will, Britt Peters & Associates
Borhani, Kalantar, Kolij
70’ span crossing the ready river, making it world longest 3D printed birdge. Kerfonic Wall Autodesk Installation
Parametric House transLAB transLAB
The Kerfonic Wall is a 20′ x 8′ permanent artwork at San Francisco's Autodesk Gallery.
Collabrators
transLAB, Cinnabar California Inc, AutoDesk Gallary Borhani, Kalantar, Kolij
The Autodesk Technology Center, San Francisco, CA
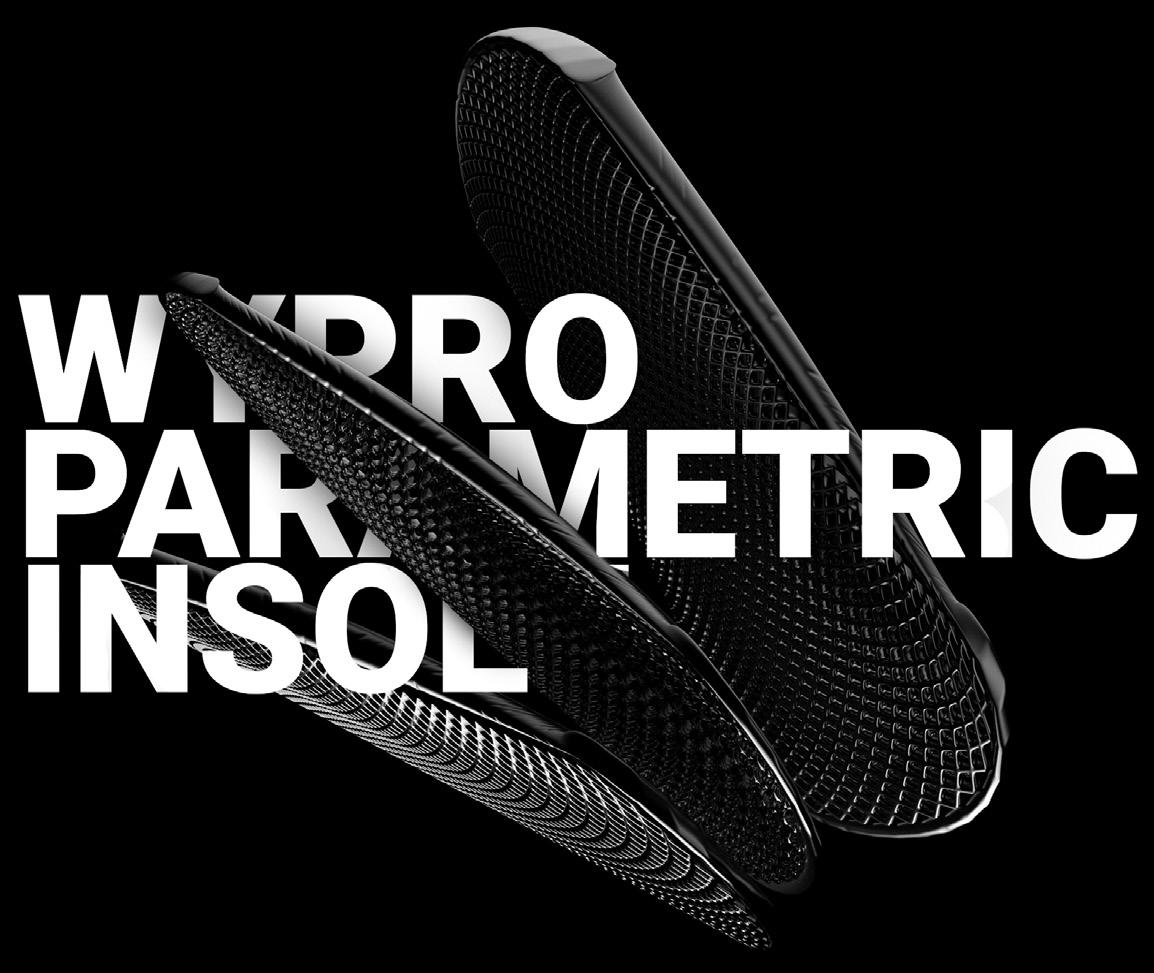
Wypro Parametric Insole 2020
https://www.3dnatives.com/es/wypro-tecnologias-3d-desarrollo-plantillas-260720222/#!
Space filling patterns inside insoles to achieve durability and optimal cost. Design parametric shoe insoles based on foot scan
Location
Location Malaga, Spain
WYPRO
Page 2/2 22/10/19 DigitalVerison
Other
erfan.rezaei.azari@gmail.com +98
erfanera erfanera erfanera
Erfan Rezaei Azari
912 285 9751
Education Course Workshop
Language
Contermporary Architects Association of Iran, Tehran, Iran Location
Persian University
Curators
Contemporary Architects Association of IranAzadi Innovation Factory, Tehran
The
Page 1/2 22/10/19 DigitalVerison https://www.behance.net/erfanera https://www.behance.net/erfanera https://github.com/erfanera
Alireza Borhani, Dr.Negar Kalantar, Dr.Anastasia Muliana, Zaryab Shahid, Ed Green
Sound of Kerfing
Khazaei, Kiyani, Ebrahimi, Qadamyari, Rafizadeh
PROFESSIONAL PROJECTS
The richest resource of learning computational Design to reveal the potential of Grasshopper Including 300+ tutorials and 1000+ Scripts, creating the world largest community for Grasshopper educators. As a computation Designer my role was to create 200+ scripts aiming to cover different features of Grasshopper. As well as dedicated Python Tutorials for Grasshopper on Parametric House Youtube Channel
Collabrators
https://www.thetranslab.com/about https://www.designboom.com/architecture/kerfonic-wall-parametric-acoustic-installation-autodesk-gallery-san-fransisco-03-28-2022/
Stella3d 2019
https://www.food4rhino.com/en/app/minmash https://parametrichouse.com/minmash/ https://www.youtube.com/channel/UC9QGr_I1VN9kxd98qvLr0Uw https://github.com/erfanera/MinMash Oricut 2021
Grasshopper Plugin based on C# which simulates and
engine. https://www.food4rhino.com/en/app/oricut https://oricut.com https://www.youtube.com/c/Oricut https://github.com/erfanera/Oricut Linketix 2021
A
design
is
Live Physics Engine
simulating Mechanisms & Kinetic design. https://parametrichouse.com/linketix/ https://www.food4rhino.com/en/app/linketix https://www.youtube.com/channel/UCMHcIUzf9QdF7TWasKC9xEQ/featured https://github.com/erfanera/Linketix https://parametric-architecture.com/kerfonic-wall-the-sound-of-kerf/ https://www.designboom.com/architecture/kerfonic-wall-parametric-acoustic-installation-autodesk-gallery-san-fransisco-03-28-2022/
Linketix
a
SPATIO-SENSORIAL SPACE 2018-21
Beyhaqi parking station, Tehran, Iran
Final
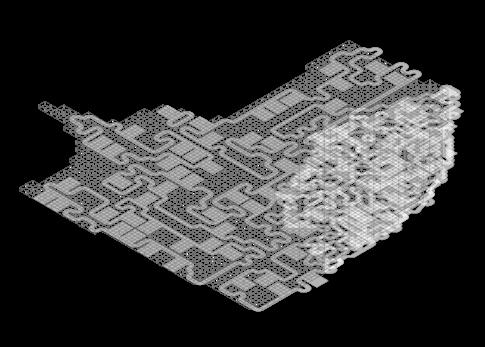
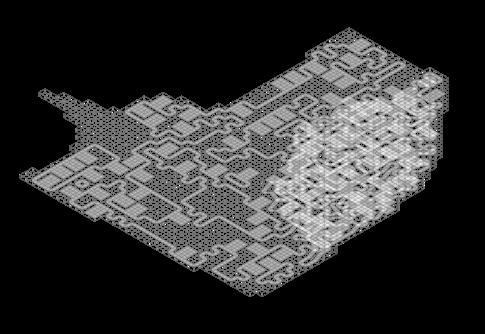
Implementation of a heuristic evolutionary optimization to nd optimized form of activity clustring, with respect to given constrains.
1
TOKYO HOTEL 2018
Tokyo Bay, Tokyo, Japan
11 Design Studio 4
Elimination of the time component to unchain the hierarchical process of program placement within a time block
STELLA 3D 2019
An Agent based Co-Developer | Anahid Grasshopper Plugin based on C# which simulates particles behaviour in custom enironments with more than 8000 downloads on Food4Rhino
3D KERFING 2021
A functional method to bridge the gap between digital geometries into practical geometries.
14
18
2020-22
RE-THINKING MODULARITIES
iming to re-de ne our basic understanding of patterns, re-discovering possibilities and expanding the rational capacity of complex geometries in which it investigates the overlap between various design disciplines
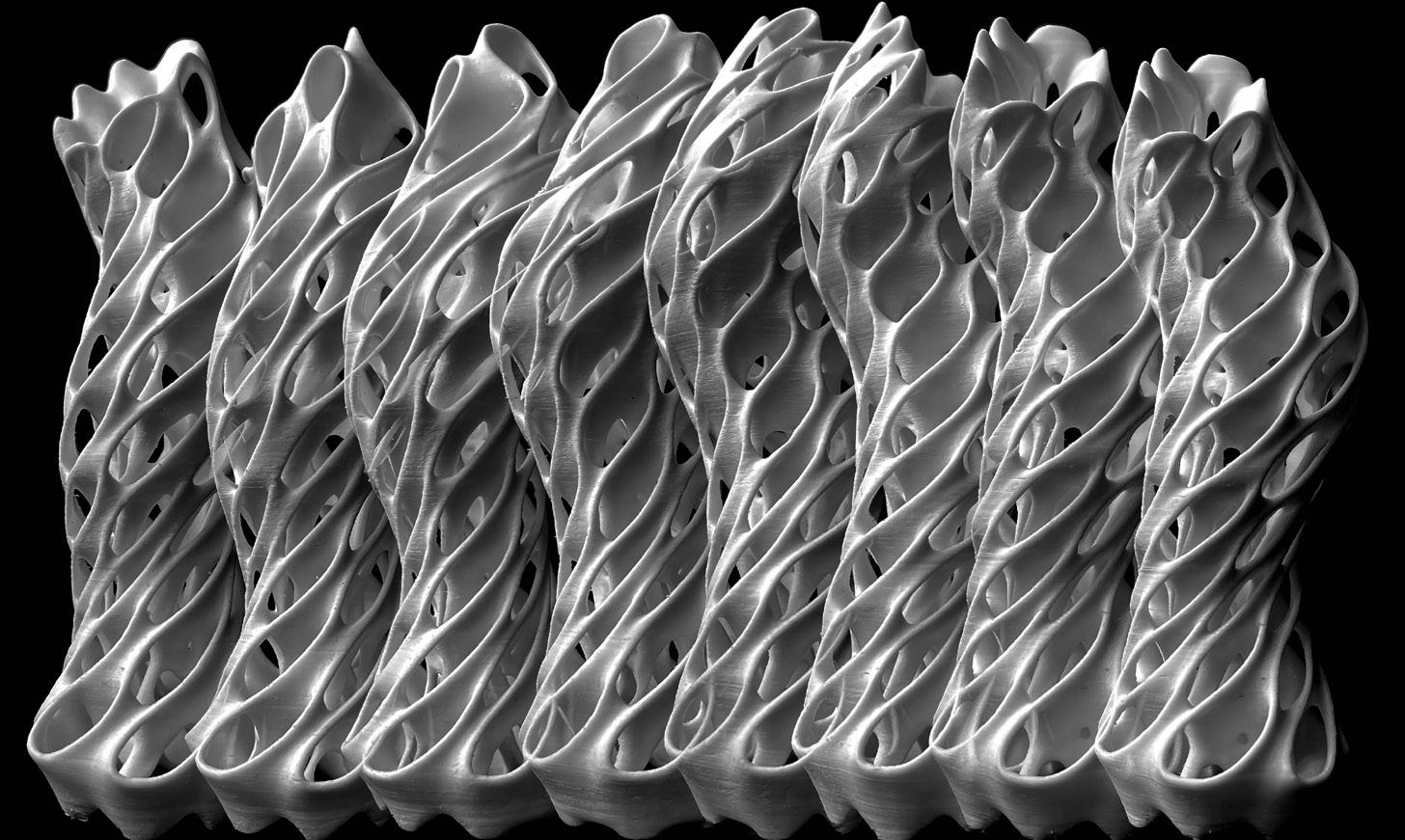
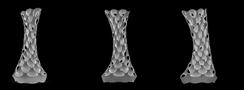
ANTI-OLOID 2022
Continuous surface created by the trajectory of a line connecting two points that travel along two congruent circles in perpendicular planes so that the center of each circle lies on the edge of the other
SHOE INSOLE 2020
Shoe insole customized manufacturing based on space lling patterns inside insoles to achieve durability and optimal cost.
BIO BULB 2022
An exhibitional ower stand aimed to showcase the smart ower pots
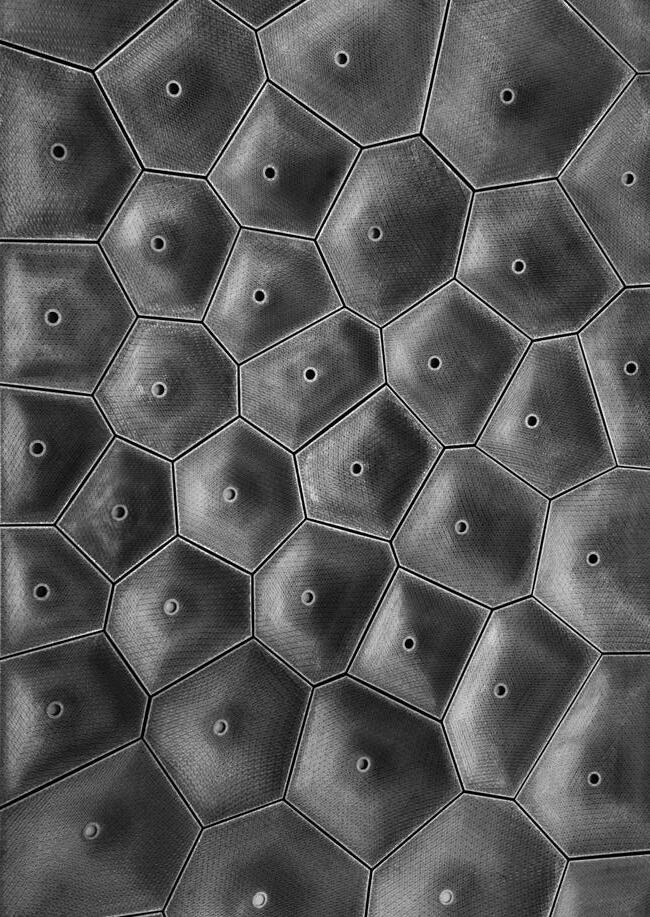
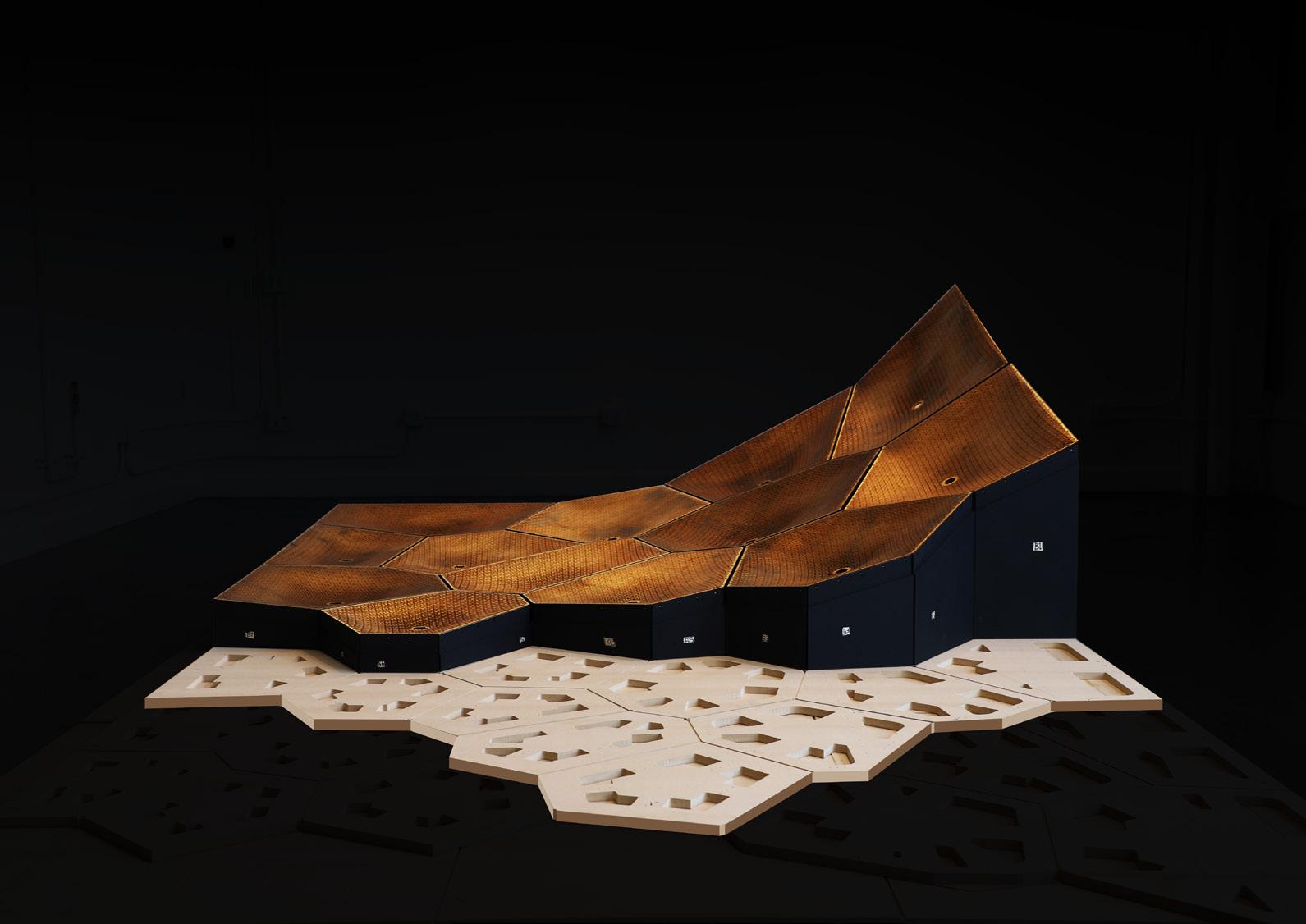
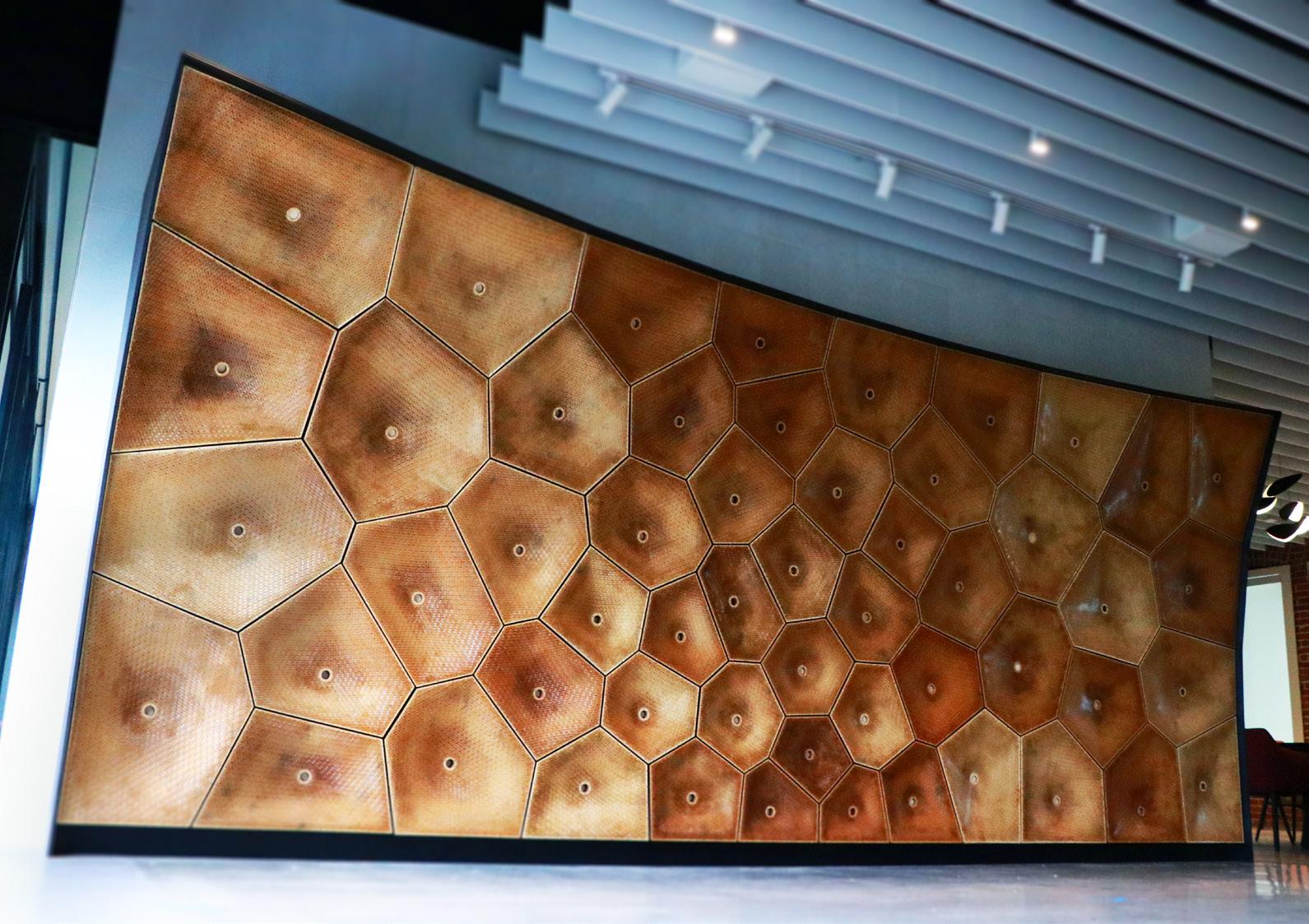
KERFONIC WALL 2021-22
The Kerfonic Wall is a 20’ x 8’ permanent artwork at San Francisco's Autodesk Gallery.
20
23
25
27
29
ACADEMIC
TABLE
PROFESSIONAL
OF CONTENT
Thesis

1 Spatio-Sensorial Space 1
SPACE SPATIO - SENSORIAL
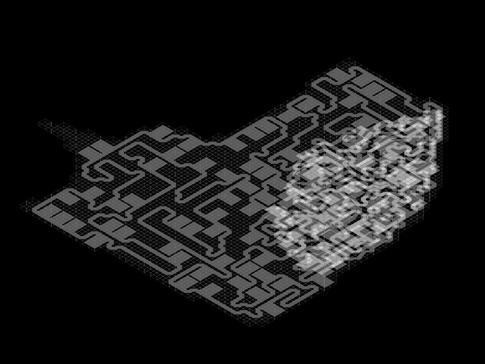
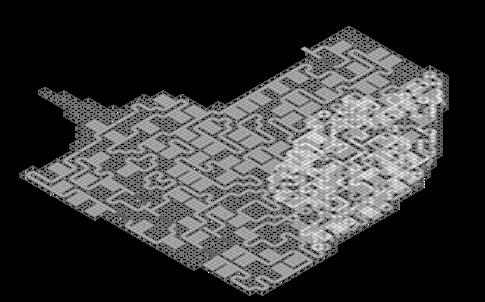
COMBINATORIAL COMPOSITION OF PROTOCOL BEYHAQI INTERMODAL STATION
Objectives of Park-and-Ride/Pool Facilities
• Increasing availability of alternatives to driving alone, by providing travelers with the opportunity to readily transfer from low- to high-occupancy travel modes and vice-versa. This opportunity affords an effective combination of passenger collection by automobile or bicycle, with trunk route travel via rail transit, bus, vanpool, or carpool.
• Concentrating transit rider demand to a level enabling transit service that could not otherwise be provided. In many low-density areas, without park-and-ride facilities and service, no attractive public transit could be effectively operated.
• Expanding the reach of transit into low-density areas, thereby bringing more riders to premium transit services like rail and express bus. For such services, park-and-ride users can represent a substantial portion of total ridership and induce demand concentrations sufficient to warrant the higher quality of transit service.
• Offering a convenient, safe meeting point and parking location for carpoolers and vanpoolers, to facilitate pool formation, and to support ridesharing in locations where sufficient demand might not otherwise occur for ridesharing to a common destination.
• Reducing vehicle-miles of travel (VMT) and possibly pollutant emissions.Encouragement of highoccupancy travel mode use and reduction in distances driven alone, as long as severe indirectness of travel does not result, can help reduce system VMT. With proper system design, VMT reductions can in most cases translate into air quality improvements.
• Shifting of parking away from the CBD and, to some extent, other dense activity centers. Thousands of parking spaces for a region’s central core may be provided through parkand-ride and park-and-pool facilities. This transfer of parking can have significant effect on reducing CBD parking supply requirements and downtown street congestion.
• Relieving neighborhoods of uncontrolled informal parking caused by park-and-ride/pool activity occurring in the absence, or with insufficient capacity, of formal facilities.

Beyhaqi M M M M Imam Khomeini M M M M M M BRT BRT BRT Abshar-Line BRT Terminal 5-3 BRT Terminal Modares Resalat Bokhares Saei Park Mosalla Site Beheshti Beyhaqi LINE3 M Ab-o-Atash-complex Central Bank Museum Book Garden National Library Mashahir Sq Rah-e-Choubi Rah-e-Choubi Tabiyat Bridge Activity Clusters Transportation Entrances P&R Managment Facilites Banquet hall Mosque Hyper Market Restaurant cafe Transportation Crosstown Bus Transportation Agencies Drivers Facilities Car Transportation Agencies Urban Parking Automobile repair shop services Bus Parking Buses 82,805 m 428
Trans-Regional Infrastructure Transportaion Graph Activity Clusters B uilt Fabric Spatio-Sensorial Space 2
Car Inspection Car Wash Shopping Maintenance Parking Cargo Agencies Dinning Terminal Possibility Distance This is heuristic evolutionary optimization to find best form of activity clustring, with respect to given constrains. Activies can freely flow on possibility surface. Position on this surface can be describe with XActivity , YActivity * Car Inspection Car Wash Shopping Maintenance Parking Cargo Agencies Dinning Terminal Possibility Distance This is heuristic evolutionary optimization to find best form of activity clustring, with respect to given constrains. Activies can freely flow on possibility surface. Position on this surface can be describe with XActivity YActivity * Possibility Distance Activities Distribution Table The activites can expand due to given Distribution Table. Programs Allocation-Solver Distant/Possibilities Table
Programs Effectiveness Scores Site Mapping Example Minimum Activity Area Penalty PenaltyActivity = AreaActivity - AreaMinActivity Problem Hyper Parameter Optimizer Parameter Generation_Size : 150 Population_Size : 60 Crossover_Rate 70% Crossover_Rate 70% Mutation_Rate 15% Fitness_Function = Σ ((AreaActivity * PenaltyFactorActivity)-PenaltyActivity )+Σ(SpeedScoreActivity Activity Min. Area Parking 3000 m2 Car Service 300 m Maintenance 1000 m Terminal 6000 m2 Cargo 3000 m2 Shopping 3000 m2 Dinning 3000 m2 XActivity 0<X<1 YActivity 0<Y<1 1349800 1349800 0 -909387 Fitness Function Penalty Factor -528802.97 -396168.59 -263534.2 -130899.82 1734.56 134368.94 267003.32 399637.71 532272.09 664906.47 797540.85 930175.23 1062809.61 Last Gen First Gen Standard Deviation Graph Parallel Coordinate Plot 0 -1349800 909387 -173504.86 Fitness Criteria Fitness Criteria 1 2 Penalty Factor Fitness Value High Speed Low Speed SpeedScoreActivity = -Dist(LowSpeedZone PositionActivity) SpeedScoreActivity = -Dist(HighSpeedZone PositionActivity) LowSpeedActivity HighSpeedActivity HighSpeedActivity LowSpeedActivity Dinning Shopping Maintenance CarService Cargo Terminal Parking Solver Setup Solver Setup Speed Score Spatio-Sensorial Space 3
Programs Effectiveness Scores
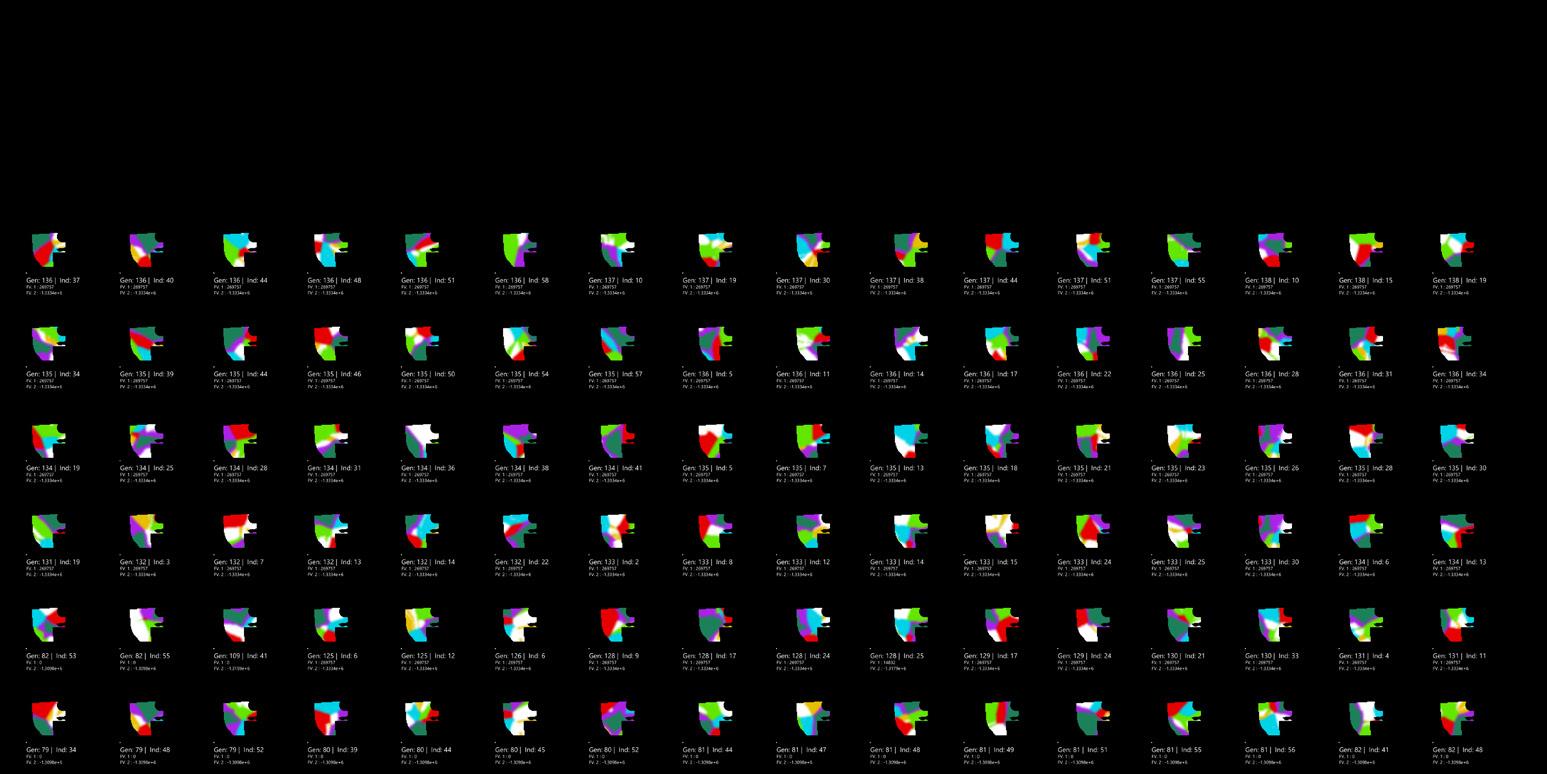
Solver Setup Gen: 79 Ind: 34 Gen: 79 Ind: 48 Gen: 79 Ind: 52 Gen: 80 Ind: 39 Gen: 80 Ind: 44 Gen: 80 Ind: 45 Gen: 80 Ind: 52 Gen: 81 Ind: 44 Gen: 81 Ind: 47 Gen: 81 Ind: 48 Gen: 81 Ind: 49 Gen: 81 Ind: 51 Gen: 81 Ind: 55 Gen: 81 Ind: 56 Gen: 82 Ind: 41 Gen: 82 Ind: 48 Gen: 82 Ind: 53 Gen: 82 Ind: 55 Gen: 109 Ind: 41 Gen: 125 Ind: 6 Gen: 125 Ind: 12 Gen: 126 Ind: 6 Gen: 128 Ind: 9 Gen: 128 Ind: 17 Gen: 128 Ind: 24 Gen: 128 Ind: 25 Gen: 129 Ind: 17 Gen: 129 Ind: 24 Gen: 130 Ind: 21 Gen: 130 Ind: 33 Gen: 131 Ind: 4 Gen: 131 Ind: 11 Gen: 131 Ind: 19 Gen: 132 Ind: 3 Gen: 132 Ind: 7 Gen: 132 Ind: 13 Gen: 132 Ind: 14 Gen: 132 Ind: 22 Gen: 133 Ind: 2 Gen: 133 Ind: 8 Gen: 133 Ind: 12 Gen: 133 Ind: 14 Gen: 133 Ind: 15 Gen: 133 Ind: 24 Gen: 133 Ind: 25 Gen: 133 Ind: 30 Gen: 134 Ind: 6 Gen: 134 Ind: 13 Gen: 134 Ind: 19 Gen: 134 Ind: 25 Gen: 134 Ind: 28 Gen: 134 Ind: 31 Gen: 134 Ind: 36 Gen: 134 Ind: 38 Gen: 134 Ind: 41 Gen: 135 Ind: 5 Gen: 135 Ind: 7 Gen: 135 Ind: 13 Gen: 135 Ind: 18 Gen: 135 Ind: 21 Gen: 135 Ind: 23 Gen: 135 Ind: 26 Gen: 135 Ind: 28 Gen: 135 Ind: 30 Gen: 135 Ind: 34 Gen: 135 Ind: 39 Gen: 135 Ind: 44 Gen: 135 Ind: 46 Gen: 135 Ind: 50 Gen: 135 Ind: 54 Gen: 135 Ind: 57 Gen: 136 Ind: 5 Gen: 136 Ind: 11 Gen: 136 Ind: 14 Gen: 136 Ind: 17 Gen: 136 Ind: 22 Gen: 136 Ind: 25 Gen: 136 Ind: 28 Gen: 136 Ind: 31 Gen: 136 Ind: 34 Gen: 136 Ind: 37 Gen: 136 Ind: 40 Gen: 136 Ind: 44 Gen: 136 Ind: 48 Gen: 136 Ind: 51 Gen: 136 Ind: 58 Gen: 137 Ind: 10 Gen: 137 Ind: 19 Gen: 137 Ind: 30 Gen: 137 Ind: 38 Gen: 137 Ind: 44 Gen: 137 Ind: 51 Gen: 137 | Ind: 55 Gen: 138 Ind: 10 Gen: 138 Ind: 15 Gen: 138 Ind: 19 Gen: 138 Ind: 21 Gen: 138 Ind: 26 Gen: 138 Ind: 29 Gen: 138 Ind: 37 Gen: 138 Ind: 45 Gen: 138 Ind: 54 Gen: 139 Ind: 5 Gen: 139 Ind: 18 Gen: 139 Ind: 25 Gen: 139 Ind: 30 Gen: 139 Ind: 37 Gen: 139 Ind: 44 Gen: 139 Ind: 51 Gen: 140 Ind: 5 Gen: 140 Ind: 8 Gen: 140 Ind: 14 Gen: 140 Ind: 20 Gen: 140 Ind: 26 Gen: 140 Ind: 32 Gen: 140 Ind: 36 Gen: 140 Ind: 40 Gen: 140 Ind: 48 Gen: 140 Ind: 51 Gen: 140 Ind: 53 Gen: 140 Ind: 54 Gen: 140 Ind: 57 Gen: 141 Ind: 3 Gen: 141 Ind: 5 Gen: 141 Ind: 21 Gen: 141 Ind: 28 Gen: 141 Ind: 34 Gen: 141 Ind: 37 FV. 1 0 FV. 2 -1.3098e+6 FV. 1 0 FV. 2 -1.3098e+6 FV. 0 FV. -1.3098e+6 FV. 0 FV. -1.3098e+6 FV. 0 FV. -1.3098e+6 FV. 0 FV. -1.3098e+6 FV. FV. -1.3098e+6 FV. FV. -1.3098e+6 FV. 1 FV. 2 -1.3098e+6 FV. 1 FV. 2 -1.3098e+6 FV. 1 FV. 2 -1.3098e+6 FV. 1 FV. 2 -1.3098e+6 FV. 1 0 FV. 2 -1.3098e+6 FV. 1 0 FV. 2 -1.3098e+6 FV. 1 0 FV. 2 -1.3098e+6 FV. 0 FV. -1.3098e+6 FV. 1 0 FV. 2 -1.3098e+6 FV. 1 0 FV. 2 -1.3098e+6 FV. 0 FV. -1.3159e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 14832 FV. 2 -1.3179e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 14832 FV. 2 -1.32e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 1 269757 FV. 2 -1.3334e+6 FV. 269757 FV. -1.3334e+6 FV. 269757 FV. -1.3334e+6 0 Score Gen: 149 Ind:0 Ind:5 Ind:10 Ind:15 Ind:20 Ind:25 Ind:30 Ind:35 Ind:45 Ind:55 Ind:60 Gen: 148 Ind:0 Gen: 147 Ind:0 Gen: 146 Ind:0 Gen: 145 Ind:0 Gen: 0 Ind:0 Ind:5 Ind:15 Ind:25 Ind:30 Ind:35 Ind:45 Ind:50 Ind:55 Ind:60 Ind:0 Spatio-Sensorial Space 4
Programs Allocation-Solver
Syntactic Code

Modules and Relations



Turn-Ped-Access 02 Straight-Ped-Access Y Straight-Ped-Access X
Turn-Route 02 Straight-Route Y Straight-Route X
Turn-Ped-Access 03
Vertical-Ped-Acceas Y Turn-Ped-Access 04



Car-Parking X
Epra que est, nita venis re, cus verum es ist resere plabore prae. Uciatiam recture, omniet faces ipicill aborepeliant mil illorpo rrumquatem quo est, cuptas asperum quatquam quid modit fuga. Ut elicid modit es volupta tempore, et quae si dolorit autRa dolo vitiis dus.
Aqui delland andenihilici officae volut pa nimos doloribusam sint es nimilit quam, corepta tatiantur? Nullian dundero vidunt.
Gitintendi inulparum inctem quae restiat odi sequunt quosam vo
Car-Parking Y
Shopping-Site Restaurant Y

Bus-Parking X
Restaurant X Bus-Parking Y
5
Spatio-Sensorial Space
Syntactic Code
Observation Analogy
Shop Bus-Parking Restaurant Pedestrain Car-Parking Roads Restroom Sta Room-O ce Observation 322 Shop Bus-Parking Restaurant Pedestrain Car-Parking Roads Restroom Sta Room-O ce 364 58 2 641 56 44 12 5 Observation 546 Shop Bus-Parking Restaurant Pedestrain Car-Parking Roads Restroom Sta Room-O ce 364 58 2 641 56 44 12 5
Observation 742 58 2 641 44 58 2 641 44 Observation 14 Shop Bus-Parking Restaurant Pedestrain Car-Parking Roads Restroom Sta Room-O ce 364 58 2 641 56 44 12 5 Observation 125 Shop Bus-Parking Restaurant Pedestrain Car-Parking Roads Restroom Sta Room-O ce 364 58 2 641 56 44 12 5 364 12 Shop Bus-Parking Restaurant Pedestrain Car-Parking Roads Restroom Sta Room-O ce 5 364 56 12 5 56 Observation 782 Spatio-Sensorial Space 6
Spatio-Sensorial Space 7
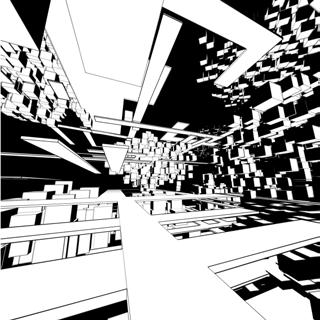
SPACE SPATIO - SENSORIAL



COMBINATORIAL COMPOSITION OF PROTOCOL CHITGAR LAKE METRO STATION
Spatio-Sensorial Space 8
SPACE SPATIO - SENSORIAL
Architecture or building industery procedure is a finite process which always comes to an end, weather become success or not.However procedure of software devlopers is look like a cycle rather than a finite process. the task of a developer is not always become with an certain answer or anything absoulote they have permission to experience and discover, they can upgrade or downgrade the design according to user feedback immediately. They can share and use others’ design. they may remain on a single projct for their entire life, becasue unlike architectureal projct it alwas has to enhance by passing time.
Spatio-Sensorial Space 9
SPACE SPATIO - SENSORIAL
COMBINATORIAL COMPOSITION OF PROTOCOL CHITGAR LAKE METRO STATION
10
Spatio-Sensorial Space
2018 Tokyo Bay, Tokyo TUTUOR STUDENTS ALI TAHMOURI AMIR HOSSEIN KHAZAEI ASHKAN ASHRAFI ERFAN REZAEI AZARI 2 Time-Independent Creation 11
TIME-INDEPENDENT CREATION
The procedure of programs’ distibution depends on passing time. The act of placing physical programs has a determenative effect, as each program creates significant territory of power. and the hierarchical process of placing, affects the next programs. in another word, by passing time, the effect of the new program’s power becomes much weaker. For instance, an apartment that is built in the middle of nowhere, demands some necessities such as store and the store demands café or restaurant and etc. We aim to classify this type of program’s distribution within a box We name as ‘Unplanned block’.
Another procedure of growing is independent from passing time. in such condition, the act of placing programs is restricted by the decision of architects,such as the most types of residential complexes. we name it ‘Planned block’.
Both types are bounded by the physical context of the occupied area.
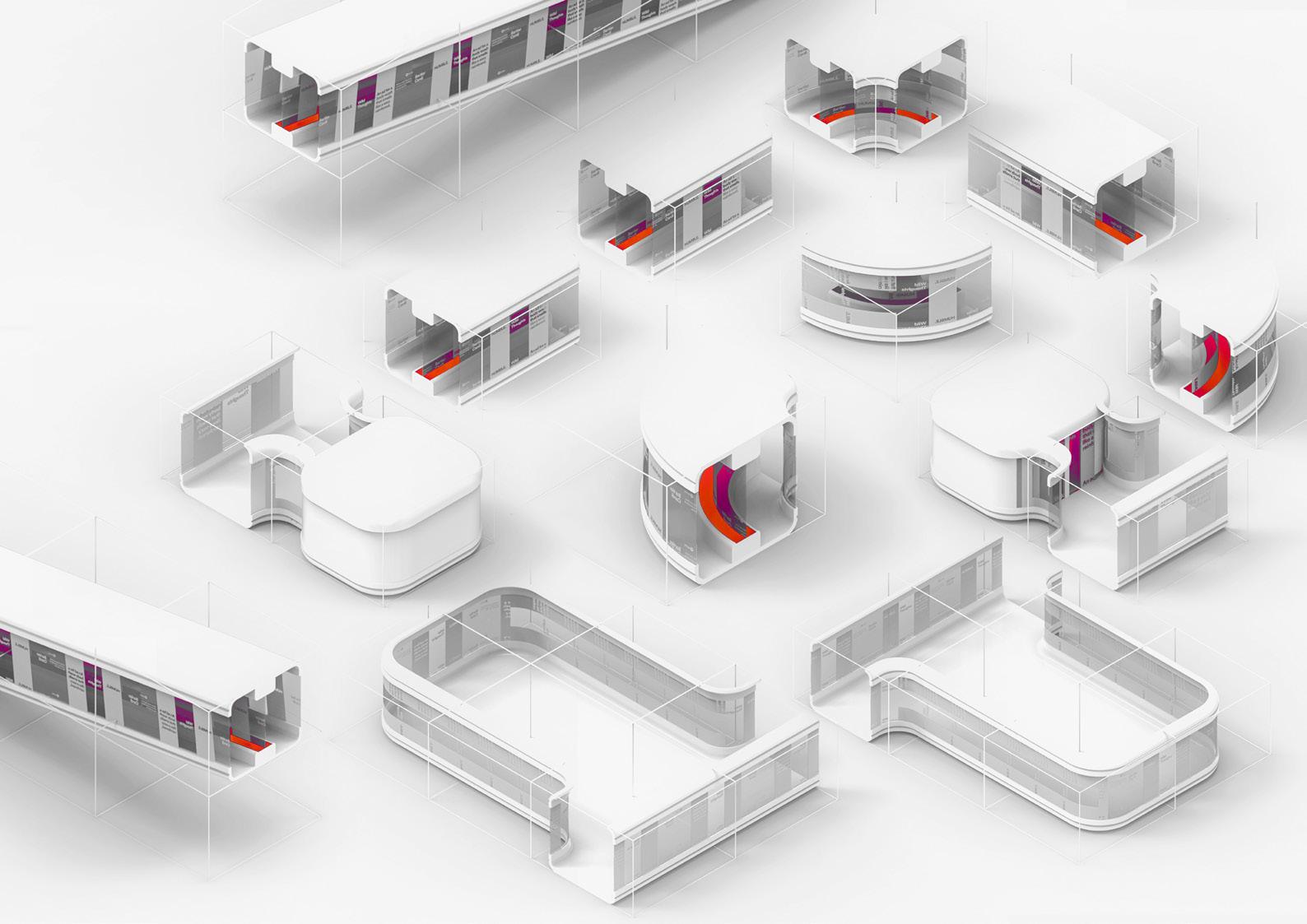
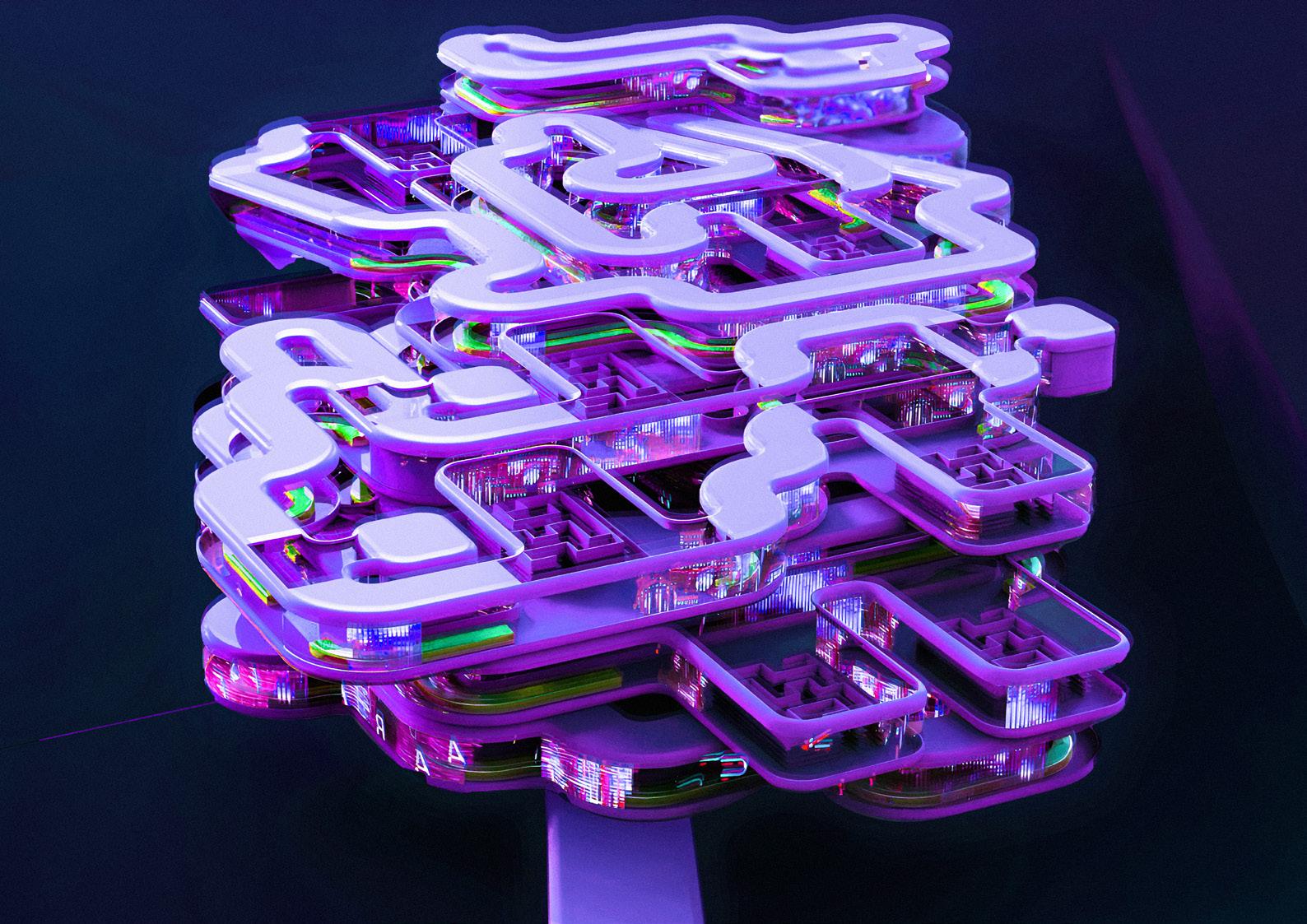
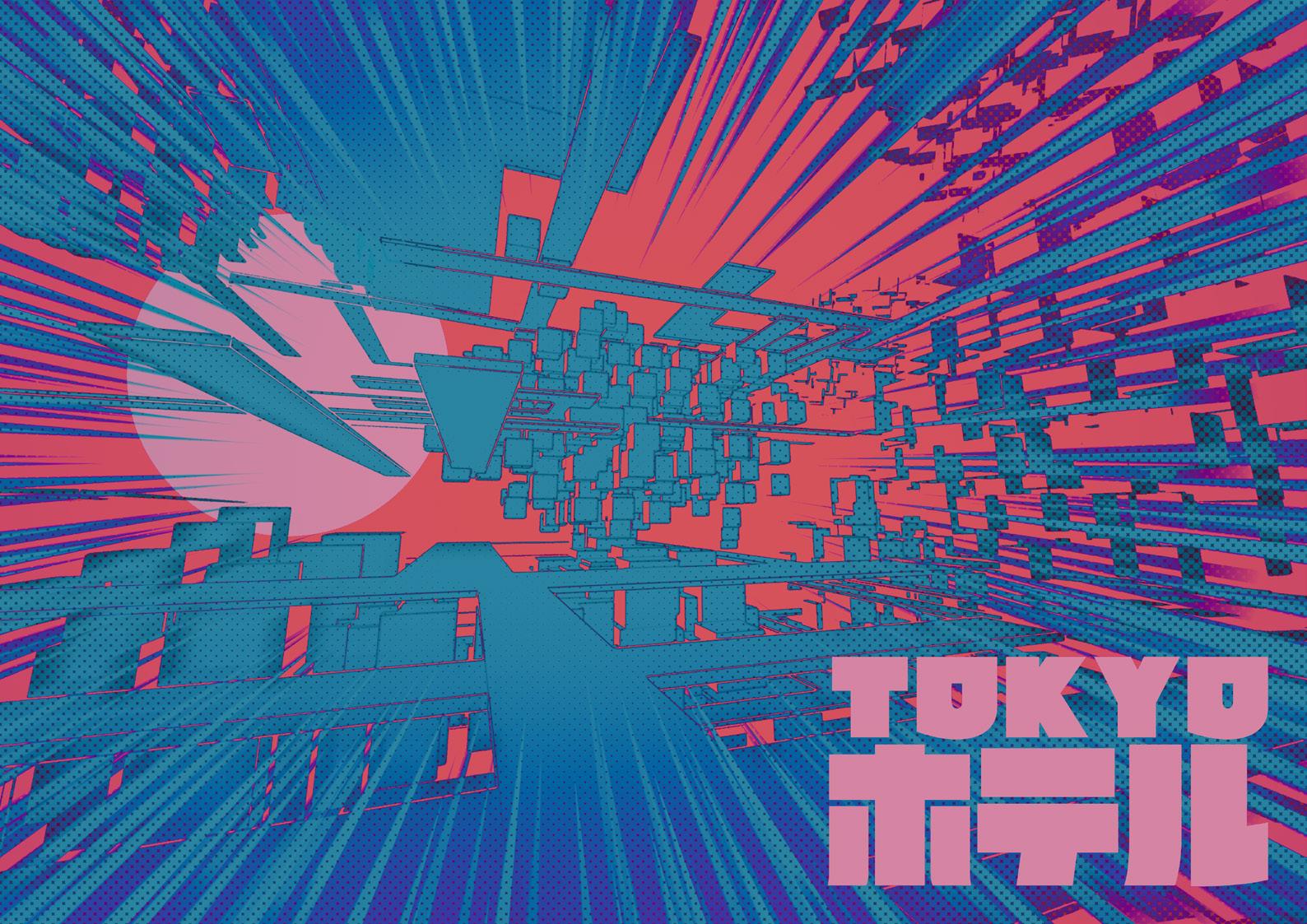
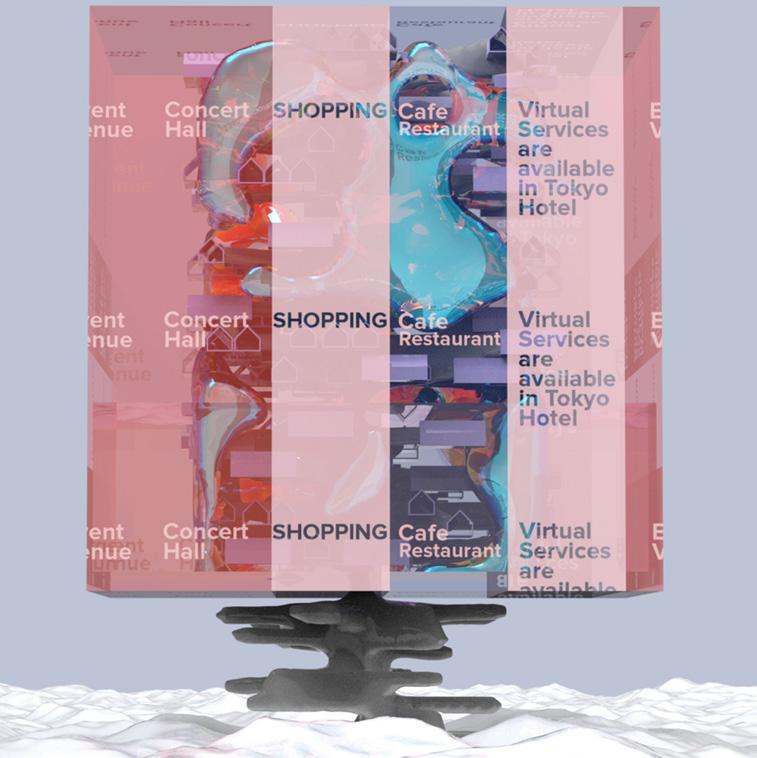
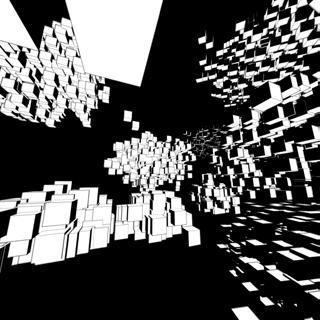
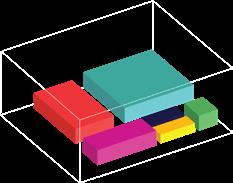
TOKYO HOTEL

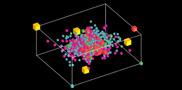
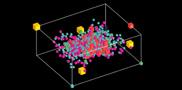
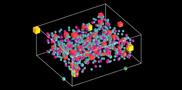
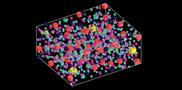
What if We eliminate the time component to unchain the hierarchical process of program placement within a block.To do so, we create a simulator to vitually explode the programs in three dimenional physical state of order. In such condition, there is no timebased privilege to the programs configuration as they versatilely converge together based on spatiofunctional genetic familiarity .

What is mightily obvious ,is that the new role of architect. Artificial block, is restricted by the randomness of elements configuration: the architect applies only the initial attributes and the system grows based on self descision, similar to the role of scenographer in a show.
In this simulation, the Performer’s acts are affected indirectly by the role of scenographer, in a way that there is no need to have a director to lead.
We merely let the exploded particles of programs to find their unique positions by themeselves, without any external intervention.
Time-Independent Creation 12
Programs allocation
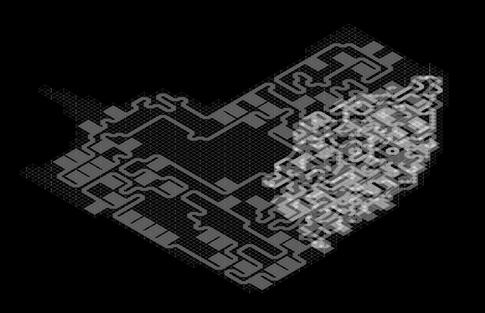
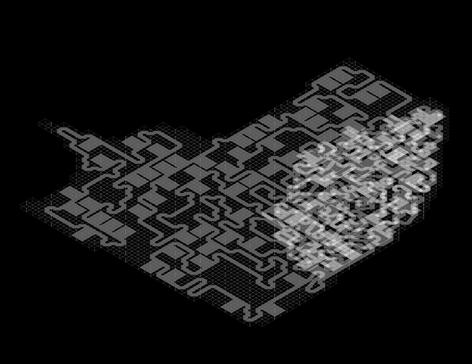
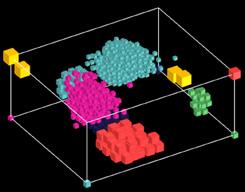
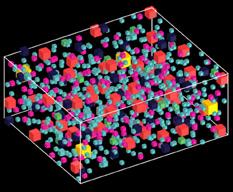
24 frames below imply the simulation of programs configuration inside one block. The smae simulations happened inside two other blocks.The final masses are the possibilities of programs’ positions. we multiplied the size of three dimensional area occupied by each person in each specific program to the number of users in that specific program to find the total program volume. In the next step We made a simulation to let each program finds its best location in a simulataneous simulation based on the proximity scores.
Dense tokyo requests new diet , sheltering to the water and sky , Different degrees of shadows and light that overlap together .
Japan is a land sorounded by water near the mountains , , thats why tokyo is misty and cloudy . Mistirious space! The root of This fact is searchable in Japanese culture. When you do not show all , you have much more convey . Or the phrase , imagination is beyond the look .
There’s no conclusion in our project , you might guess everything .
No dark spot No bright spot only Different degrees of shadows and light .
Silent and setteled cube .. in which a new life goes on .. inside it , inside of inside it ,inside of inside of inside it . Among it seams..
There is no way that you can see with your eyes ; in first sight ; that reachs to this project .
Wonderland for Alice!
Japanese philosophy has several important principles, among which Yugen, Uutsuroi and Hashi have an impact on the creation of space. Increative house Japanese architecture has gradual spaces and the boundry is blur . You do this small ceremony every time you go into the next space that remindes you that you are going over the boundry , you are on the boundry . You can not tell you are out side or inside in Katsura . The normal ristricts include residance and other programs. We exploded a definition of normal district in 3 dimesnsion of our pleasure blocks. The dawn of the project tomorrow brings a new promise of lifestyle.
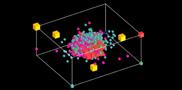
K-Means Clustring
k-means clustering is a method of vector quantization, originally from signal processing, that aims to partition n observations into k clusters in which each observation belongs to the cluster with the nearest mean (cluster centers or cluster centroid), serving as a prototype of the cluster. This results in a partitioning of the data space into Voronoi cells. k-means clustering minimizes within-cluster variances (squared Euclidean distances), but not regular Euclidean distances, which would be the more difficult Weber problem: the mean optimizes squared errors, whereas only the geometric median minimizes Euclidean distances. For instance, better Euclidean solutions can be found using k-medians and k-medoids.


















Unplanned Blocks

Possibility of Programs’ Positions Possibility of Units’ Positions
3 Dimensional Path
21 22
02 06 07 08 03 04 18 19 20 14 15 16 10 11 12 01 05 09 13 17
23 24 Programs’ Size Randomly Distribution Allocated programs
When looking at autumns mountains through mist,the view may be indistinct yet have great depth.
KAMO-NO CHOMEI
Time-Independent Creation 13
Parametric House
Available On
STELLA 3D
parametrichouse.com/Stella3d
food4rhino.com/app/stella3d

“A particle system is a collection of many many minute particles that together represent a fuzzy object. Over a period of time, particles are generated into a system, move and change from within the system, and die from the system.”
William Reeves
Particles are used in a different variation of design, simulation, and prediction.
Client 4
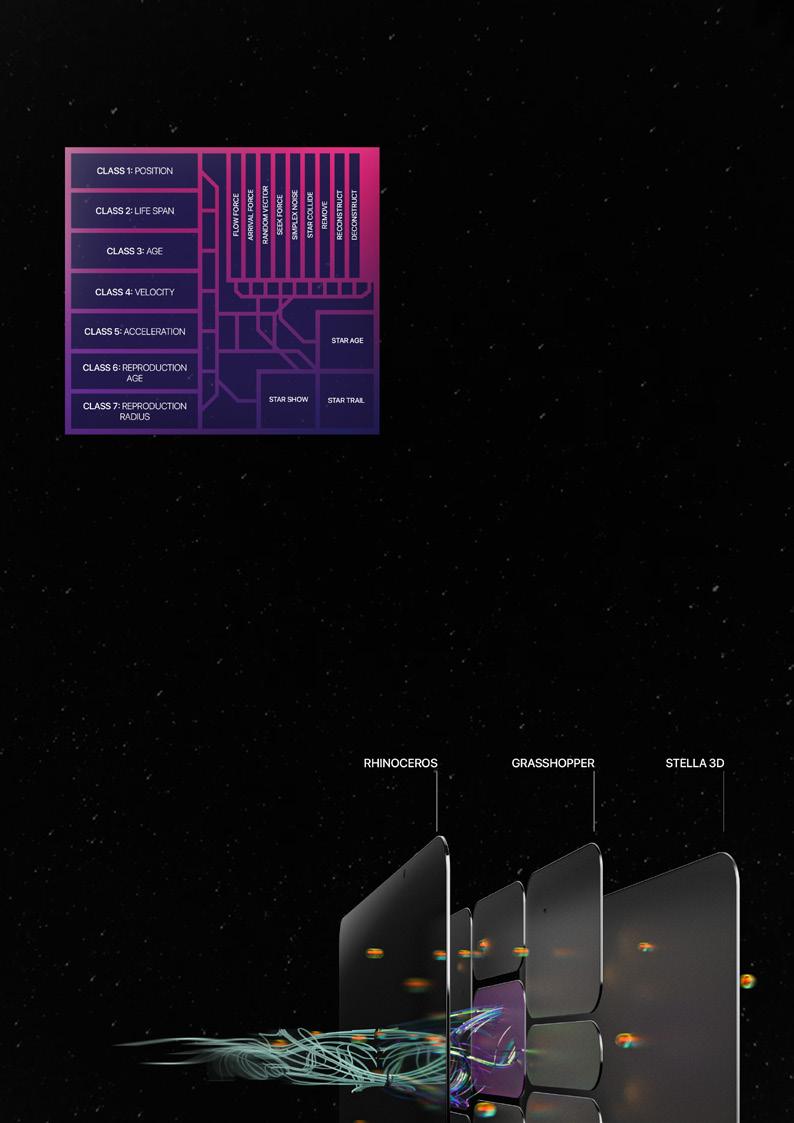
Stella3D is a plugin developeb by Erfan Rezae & Salar Anahid, which simulates the behavior of the particles in a customizable environment. Stella3D offers to designers a new method to face the design process. The discrete design implication to solve multivariable problems and design challenges such as architecture, CGI, natural behavior of phenomena, and etc.
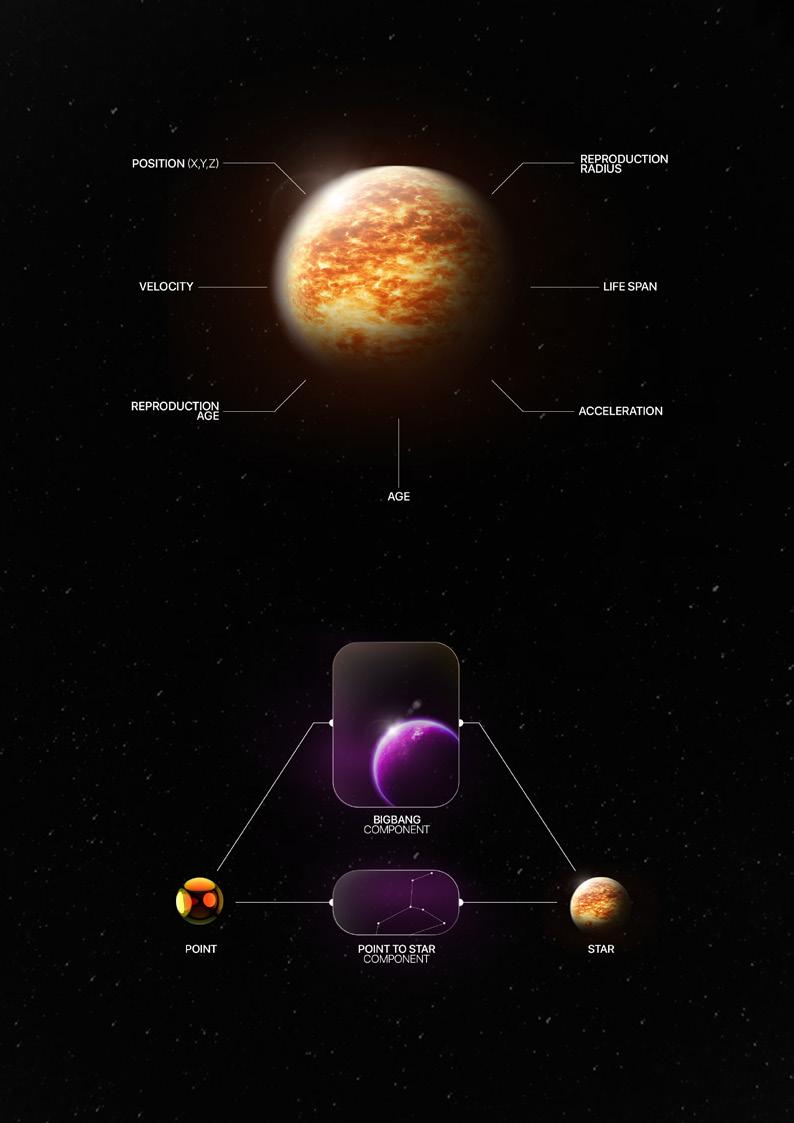
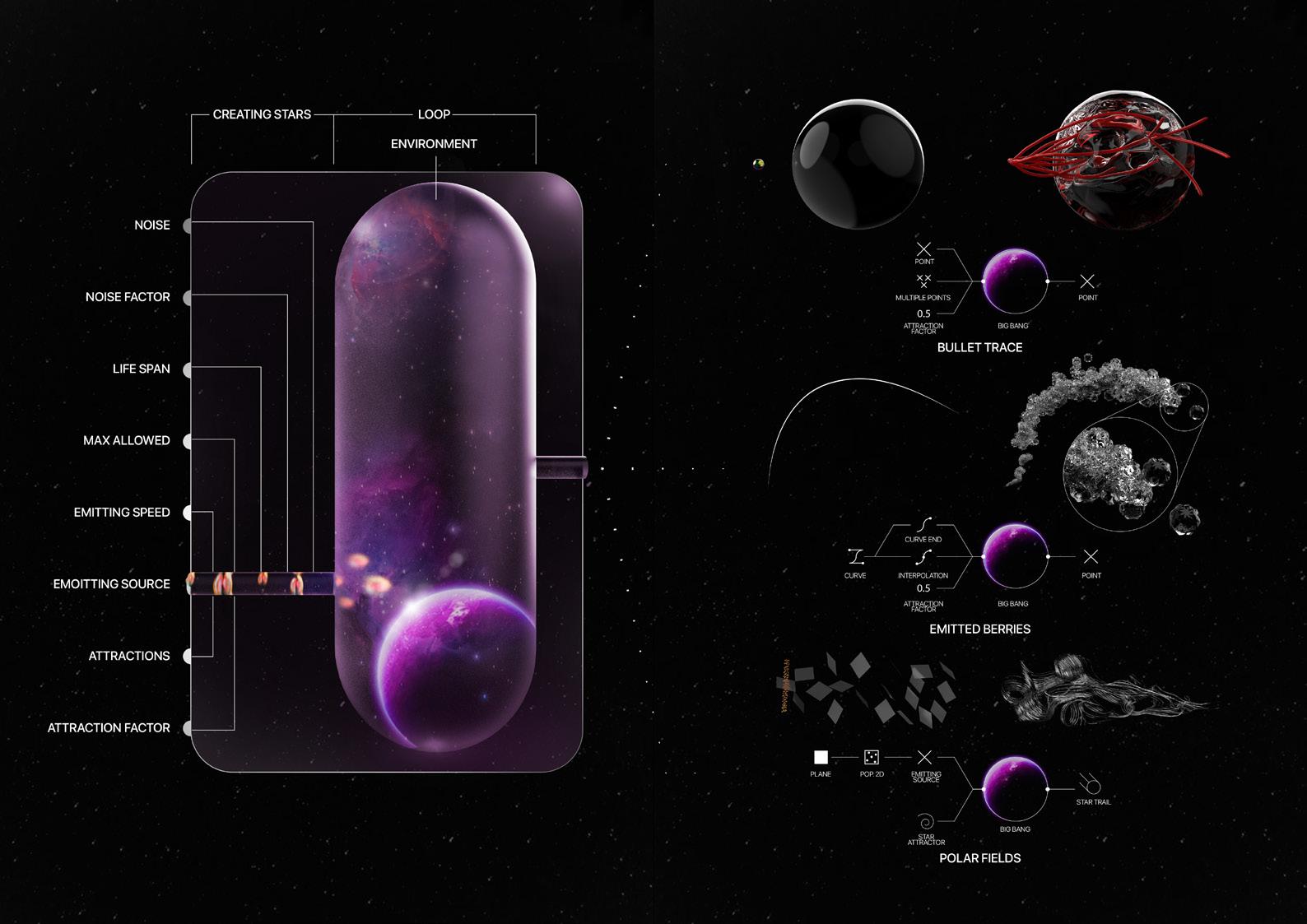
The environment can be customized by different values such as spatial properties, different variations of forces, noises, and density. The BigBang engine simulates the particle (AKA Stars) with the defined environment and particle’s initiation acceleration. The result can be shown in different ways such as history path and text documents (for example the number of the alive particles, elapsed time, and etc).
14
Stella3d Grasshopper Plugin
what is a star?
stars
Star is a Class, built into the core of the plugin which contains 7 attributes. Attributes are in charge of any change in a particle. In another word, these are the factors that are constantly changing during the simulation, due to applied forces.
stella backend
the impact of small particles
There are two different methods based on the simulation complexity, in order to create a star, the Bigbang component and Point To Star component.
stella3d big leap, the interpretation hierarchi
Star is a Class, hidden in the backbone of the Stella Algorithm which can communicate among all layers of Rhino, grasshopper and .NET platform. Using Object-Oriented methodology makes the source code easier to manipulate through different developers. Moreover, since it is independent of the Grasshopper and Rhino SDK, the interpretation of the script would be much faster in comparison to other simulation engines such as Kangaroo.
Figure 1 - Star Attribution
Figure 2 - How to create a star
Figure 3 - Classification
Figure 4 - Interpretation Hierarchy
15
Stella3d Grasshopper Plugin
bigbang component examples
bigbang, but compact!
The Big Bang component provides various approaches with pre-defined input to achieve a result automatically while some features are restricted in order to provide a simpler and more convenient experience. As a result, users can achieve fascinating results with fewer components in a shorter period.
Figure 5 - Big Bang Component
16
Stella3d Grasshopper Plugin
stella exposed
point to star component
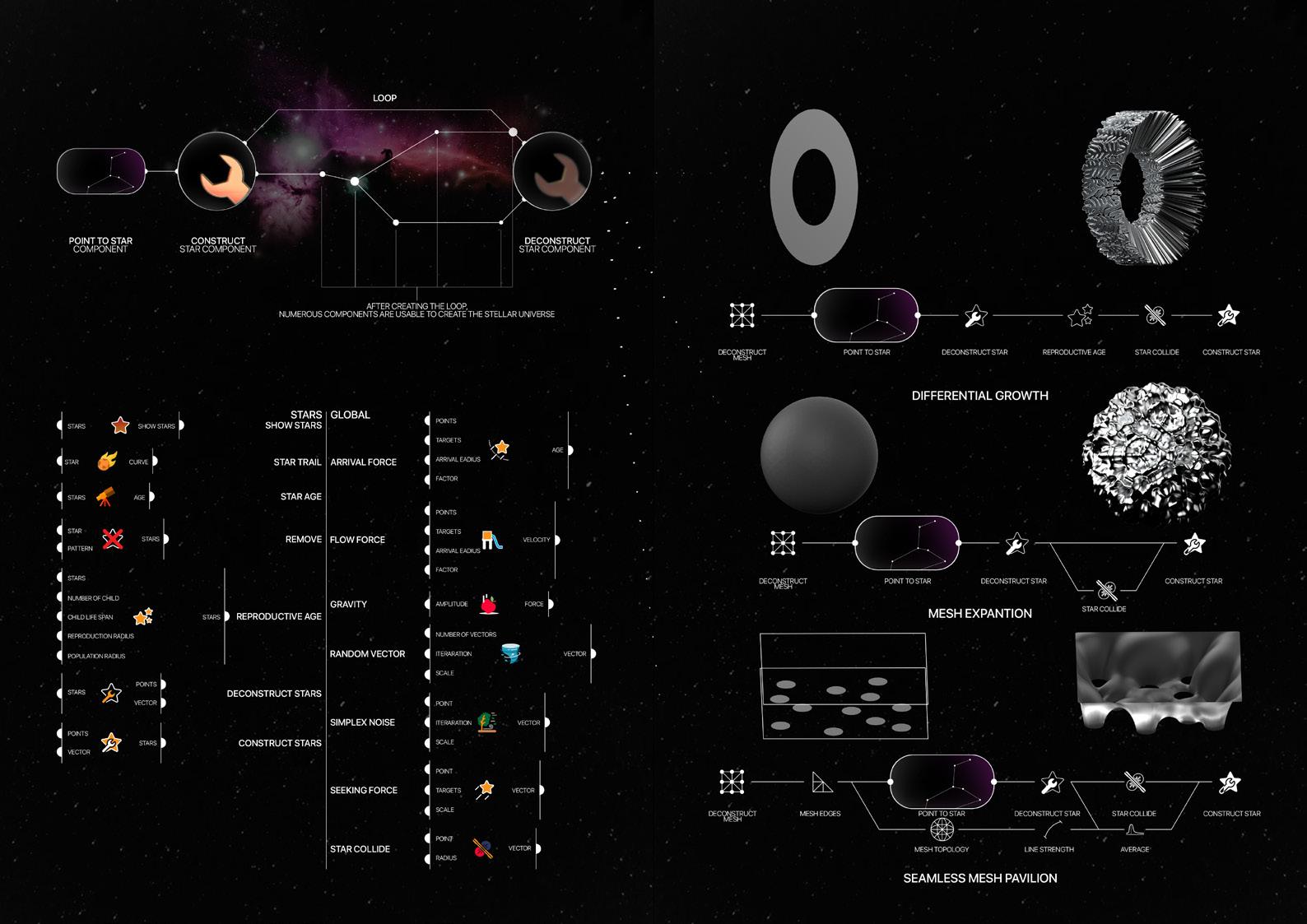
The Point to star component only receives points and creates stars from them, by assigning empty attributes. The main event occurs in a loop in which users can apply different types of forces and conditions. In this method, users have the ability to design more versatile and come up with their own solutions.
examples
what is the difference?
There are two types of components in our plug-in. The first group is star components which work with main star classes to provide more speed and versatility. The other group is the global components.
Figure 6 - Creating a Loop
a Glance
17
Figure 7 - Star Components and Global Components at
Stella3d Grasshopper Plugin
5 3D Kerfing 18
3D K erfing Algorithm

Kerfing is an act of cutting or carving in order to achieve a porosity in a material that can change the authentic behavior of the material, such as acoustic and deformation properties. Digital fabrication technologies and parametric design tools, based on knowledge of geometry. transform kerfing, into a functional method to bridge the gap between digital geometries into practical geometries. The methodology that has been discussed in this essay is a Kerfing method which achieves a porosity through the material insertion.
Topological Process

Example on 3*3
D eformation Simulation
R otation: 360
R otation: 270
R otation: 180
R otation: 45
R otation: 0
21
) Connect correspondence corners to closest P2’s corner a b d c P2 1 2 4 3 1 2 4 3 1 2 4 3 P21 a3 P22 b4 P23 c1 P24 d2 a b d c P2 1 2 4 3 1 2 4 3 1 2 4 3 4 1 Find Moduels’ connectors section Connector P2-a Connector P2-b Connector P2-c Connector P2-d Connector Section P2-a-M = scale-M(Section P2-a, Refrence a Connector Section P2-b-M = scale-M(Section P2-b, Refrence b Connector Section P2-c-M = scale-M(Section P2-c, Refrence c1 Connector Section P2-d-M = scale-M(Section P2-d, Refrence d a b d c Split 4 modules from each other P2 a Find P2’s connectors section b d c P2 2 3 1 2 3 2 4 3 Connector Section P2-a-P = scale-P(Section P2-a, Refrence P21 ) Connector Section P2-b-P = scale-P(Section P2-b, Refrence P2 Connector Section P2-c-P = scale-P(Section P2-c, Refrence P23 ) Connector Section P2-d-P = scale-P(Section P2-d, Refrence P2 N2 a center b center d center c center Translating nodes to geometry Panel2 = Convexhull( V2 Corespondense Modules a Find Intersection of Modules and Panel b d c P2 1 2 4 3 1 2 4 3 1 2 4 3 4 1
3D Kerfing 19
R e-Thinking6Modularities

Modulartities 20
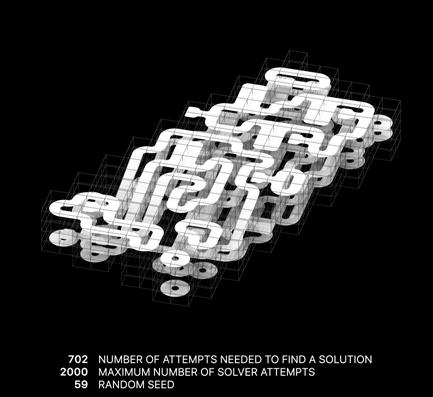
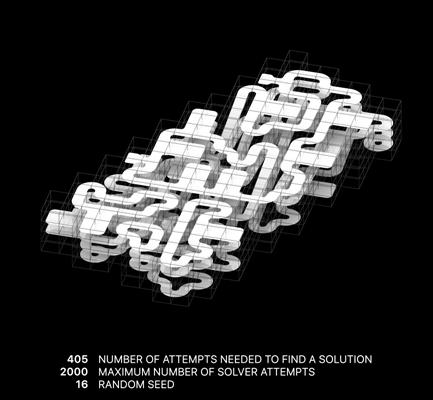
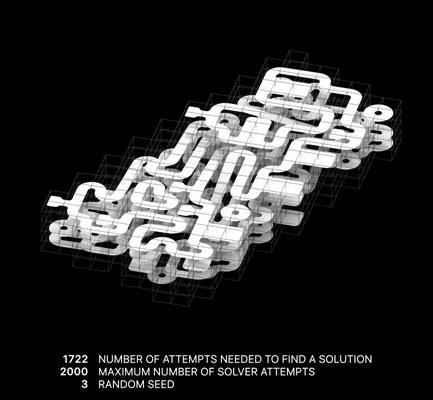
EMERGENT ROLE OF PATTERN IN FUTURE DESIGN Re-Thinking
Pattern by definition means, series/sequences that repeats. It can be represented as visible regularities in nature within a form of geometric shapes such as symmetry, fractals, spirals, bubble, tessellations and … From galaxy formation to atomic orbital, almost every phenomenon in our cosmos is governed by some rules which in physical form can be described as patterns. For over millennia mankind have been attempting to explain order in universe, using mathematics seeking to discover and explain abstract behaviors in nature.


Total cells : 42 Total cells 23 Proportion 5*3 cell Proportion : 4*2 cell Size : 35*20*5cm Configuration Configuration Dimension Dimension Size : 26*15*7cm Unrolled area : 1200 cm2 Unrolled area : 850 cm2 Average cell area : 25 cm2 Average cell area 32 cm2 Overlaping cells 6 Overlaping cells : 4
HBZ8-4 HBZ8-3
Re-Thinking Modulartities 21

Re-Thinking Modulartities
ANTI OLOID
2022
Lighting Design
A lighting design that incorporates a morphing gyroid minimal surface in Anti-Oloid geometry would likely involve a unique and complex shape that changes over time. The gyroid minimal surface is a type of mathematical structure that has a distinct, crisscrossing pattern of ridges and valleys. The Anti-Oloid geometry is a type of geometry that is closely related to the more well-known catenoid geometry, and is characterized by a smooth, double-lobed shape.

Design Status Role Size transLAB Built Computational Designer 30”*30”*90”
Anit-Oloid 23
7
This shape is the minimal expression of The Oloid. If we deconstruct both of them, we’ll find the same structure, yet, THE ANTI OLOID is made with the fewest elements possible. Creating different paths even though their motion is the same. This complex shape doesn’t have such a difficult construction as it may seem, it is a continuous surface created by the trajectory of a line connecting two points that travel along two congruent circles in perpendicular planes so that the center of each circle lies on the edge of the other.

24
Anit-Oloid
Client
Wypro Built
Status
Role Location
Computational Assistant Spain
2020
The project aimed to create a complete cycle of orthopedic and customized insoles for patients due to using foot pressure analysis and suggesting a specific configuration of modules to fill the insole. The insole’s platform could be chosen by a doctor and be modified by the Script for better performence and longer life
8 WYPRO Parametric Shoe Insole 25
WYPRO Parametric Insole






Procedure
Methodology
The methodology’s objective is to design optimized lightweight parts while ensuring a good mechanical behaviour in a continuous workflow in order to be compatible with mass customization strategies. The lightening of the pieces is achieved by a topology optimization, a further structural optimization of its lattice infill and its wireframed shell, and finally, by a multi-objective optimization of the assembly in a continuous workflow. The continuous workflow allows the methodology to establish any part of the parametric design as a variable or objective in a continuous data flow in order to automatically generate the most suitable solutions without redefining the model in intermediate phases
Modules Module Displacement Printing Density Map Insole template • EVA Custom • High Heel Cup • Kinetic Medium Heel Kinetic Medium (ext) Medium Heel Cup EVA Custom High Heel Cup Kinetic Medium Heel Kinetic Medium (ext) Medium Heel Cup
WYPRO Parametric Shoe Insole 26
BIOBULB SMART FLOWER STAND
LOCATION: A utodesk Gallery, San francisco, CA
STATUS: Proposal
ROLE: Computational Designer
9 Bio Bulb Flower Stand 27
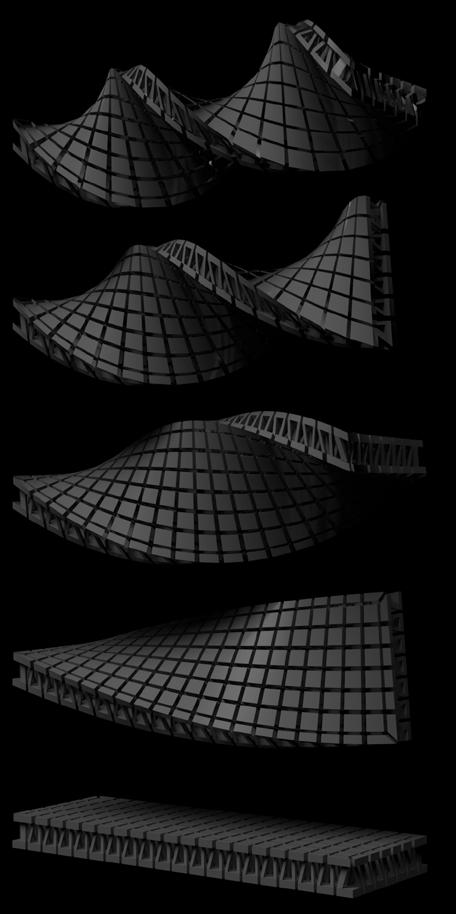
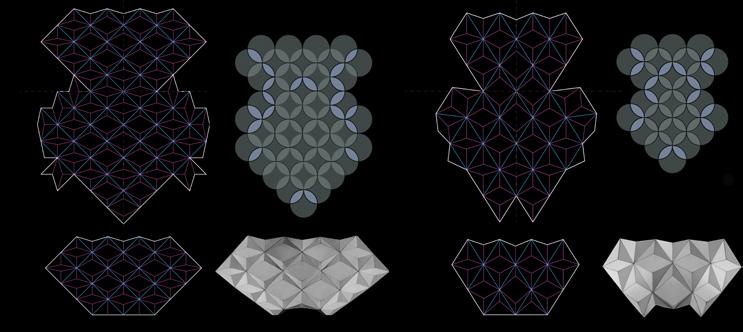
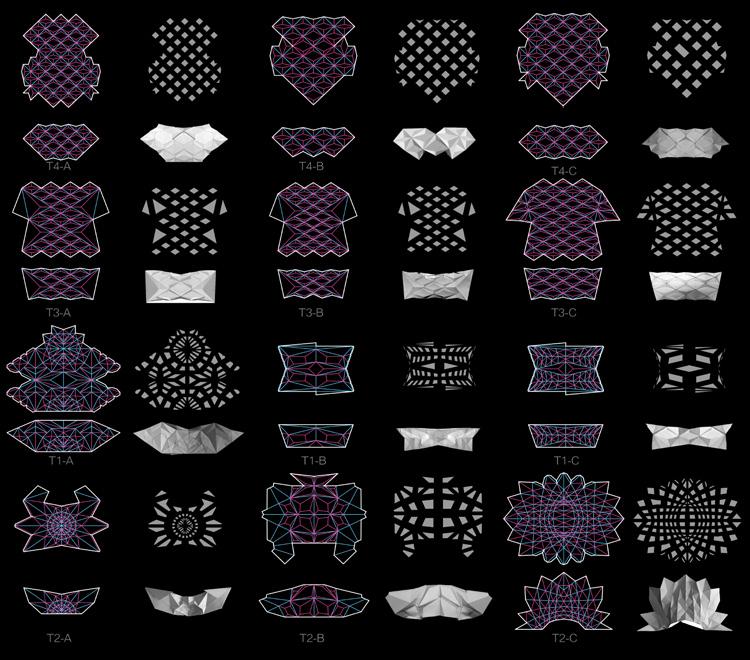
Morphing and Transformation

A flower stand design that incorporates morphing Schwartz minimal surfaces and adaptable modules for flower pots would likely be a unique and visually striking addition to any space. The Schwartz minimal surface is a type of mathematical structure that has a distinct, crisscrossing pattern of ridges and valleys, similar to the Gyroid minimal surface.








The morphing aspect of the design would likely involve a gradual transformation of the Schwartz minimal surface into a shape that can adapt to fit various flower pots. The modules would be designed to accommodate the shape, size and weight of the flower pots, allowing for a flexible and versatile flower stand. The overall design would be elegant and modern, allowing for the flowers to be the main focus while the stand complements them.

erforation
Base Twist: 0.00 Base Twist: 0.00 Base Twist: 0.00 Base Twist: 0.00 Base Twist: 0.50 Base Twist: 0.50 Base Twist: 0.50 Base Twist: 0.50 Base Twist: 0.50 Base Twist: 0.50 Base Twist: 0.50 Base Twist: 0.50 Module Twist: 0.50 Module Twist: 0.50 Module Twist: 0.50 Module Twist: 0.50 Module Twist: 0.0 Module Twist: 0.0 Module Twist: 0.0 Module Twist: 0.0 Module Twist: 0.0 Module Twist: 0.0 Module Twist: 0.0 Module Twist: 0.0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 1 1 1 1 1 1 0 = Empty 1 = Filled Grid logic Topological Structure = Vertices Void optimization Height di erence Minimal Surface = Vertices = Old Vertices = Height = Old Height
P
on geometries G rid to Minimal Surface
Bio Bulb Flower Stand 28
LOCATION: A utodesk Gallery, San francisco, CA
STATUS: Proposal
SIZE : 20’ * 8’
ROLE: Computational Designer

10
29
Kerfonic Wall
OVERALL PROCESS
• MODELING: THROUGH A PARAMETRIC DESIGN ENVIRONMENT TO CONTROL KERF DESIGN ATTRIBUTES.

• SIMULATION: VIA A RAY-TRACING ACOUSTIC SIMULATION TOOL.
• OPTIMIZATION: THROUGH AN EVOLUTIONARY SOLVER TO GENERATE NUMEROUS DESIGN ITERATIONS.










• FABRICATION: VIA AN EMBEDDED FABRICATION WORKFLOW AFTER FINALIZING THE DESIGN.




30
Keronic Wall

kerFLUX: custom script to parametrize heterogeneous kerf pattern's size, density, and regularity using attractors. kerFIELD: A custom script to generate an overall installation surface geometry and faceted segments. kerFIT kerFlux kerForm kerField kerFab Open Nest kerFlux kerForm kerFab kerFAB: A custom script to extend the kerf panel's holding structure into fabrication. Open Nest: It packs all the materials and generate labeling for fabrication instruction. kerFORM: A custom script to create 3D kerf panel changing its topology. kerField Galapagos Pachyderm Galapagos Pachyderm Ray Tracing Genomes Fitness Values Clarity/ RT/ EDT Open Nest kerFIT Cell Type Cell Size Cell Deformation Cell Density Clarity Reverberation Time Early Decay Time Ray Tracing Relief-CUT (kerFIT): An in-house plugin to generate di erent kerf unit cell types, dimensions, and aggregated patterns in de ned boundary. kerFLUX: A custom script to parametrize heterogeneous kerf pattern's size, density, and regularity using attractors. kerFIELD: custom script to generate an overall installation surface geometry and faceted segments. kerFIT kerFlux kerForm kerField kerFab Open Nest kerFlux kerForm kerFab kerFAB: custom script to extend the kerf panel's holding structure into fabrication. Open Nest: packs all the materials and generate labeling for fabrication instruction. kerFORM: custom script to create 3D kerf panel changing its topology.
Ray Tracing Genomes Fitness Values Clarity/ RT/ EDT
kerField Cell Type Cell Size Cell Deformation Cell Density
Galapagos Pachyderm Clarity Reverberation Time Early Decay Time Ray Tracing
Galapagos Pachyderm
Open Nest kerFIT
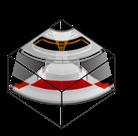
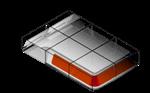
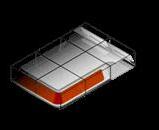
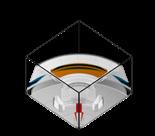
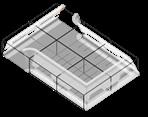
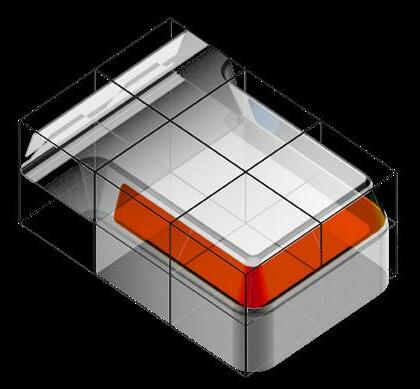
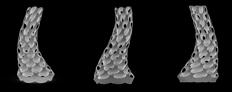
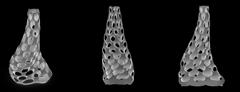
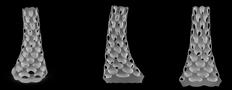
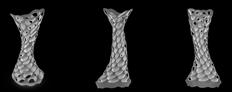
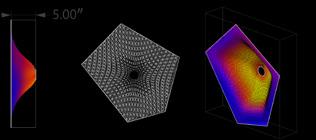
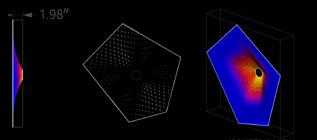
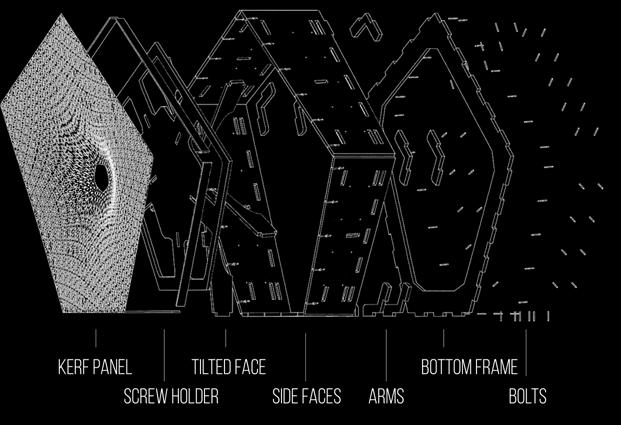
The Kerfonic Wall is a 20′ x 8′ permanent artwork at San Francisco’s Autodesk Gallery. A family of discrete brick-like boxes is stacked with bolted connections to generate a Voronoi tessellation, overcoming sound-focusing effects when oriented in various directions. Over 54 custom-cut plywood boxes were distributed irregularly throughout the wall, acting as frames for kerf-cut hyperboloid panels. Flat plywood sheets were used to make such panels. They were transformed into double-curved freeform surfaces with varying degrees of flexibility by a set of kerfs.
PERFORMANCE-DRIVEN PLATFORM IN GRASSHOPPER IS THE PRODUCT OF FOUR CORRELATIVE PROCESSES, AS FOLLOWS:
Modules fabrication
Kerf/Form pattern correlation

When stretching the kerf pieces, the maximum stress is found on thecircular ring edge and exterior perimeter. Therefore, the flatter the kerf panel is, the less tensionthat appears in those areas (Figure 19). Also, the panel’s shape and height difference between its perimeter and ring affect the stress concentrationat the corners. Therefore, the incremental manipulation of the cut lines’density creates a more gradual bending angle, avoiding a sharp kink transitionand stress concentration. Cut lines bending in a gradual curve should rotate slightly to deviate from their planar surfaces. As a result, gaps between the lines willopen up or be compressed, depending on the panel curvature.
Acoustic Performance
Virtual simulation
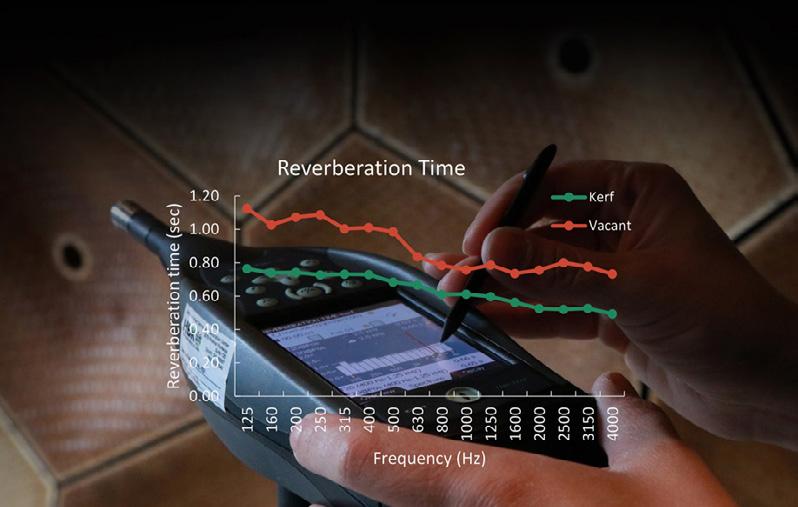

Acutal acoustic perfomance

Kerf patter 01 Elevation Kerf Pattern Perspective Kerf patter 02
Keronic Wall 31
KERF PANEL
BASE FRAME
MODULE FRAME
When stretching the kerf pieces, the maximum stress is found on thecircular ring edge and exterior perimeter. Therefore, the flatter the kerf panel is, the less tensionthat appears in those areas (Figure 19). Also, the panel’s shape and height As a series of cuts in close proximity, kerfing is able to turn a rigid planar material into various interconnected pliable elements, modifying the material’s level of flexibility (Zarrinmehr et al. 2017). Incisions made according to the kerfing method result in single or double-curved freeform shapes (Capone 2018). Although it is critical to consider material type, moisture content, and relative humidity, the amount of material removed from particular areas during the cutting process most prominently affects the kerf bending curvature.manipulation of the cut lines’density creates a more gradual bending angle, avoiding a sharp kink transitionand stress concentration. Cut lines bending in a gradual curve should rotate slightly to deviate from their planar surfaces. As a result, gaps between the lines willopen up or be compressed, depending on the panel curvature.
SIDE PANEL
32
Keronic Wall 33

