1 minute read
Interlock


Advertisement


Introduction to Robotic Fabrication
Senior Faculty: Ricardo
Mayor and Lana Awad
Large Group Project
Completed 2022
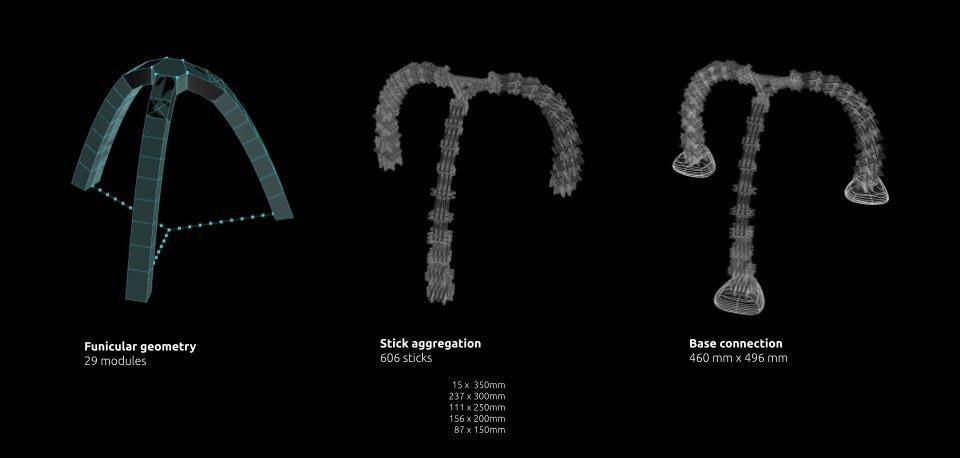
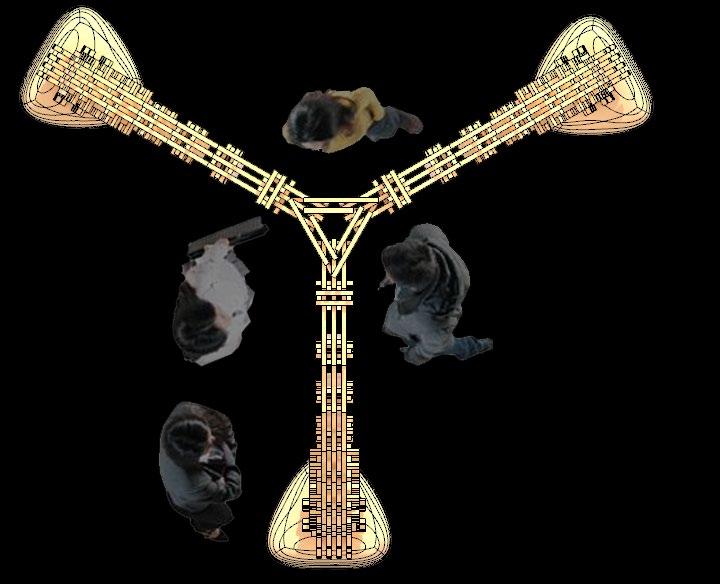
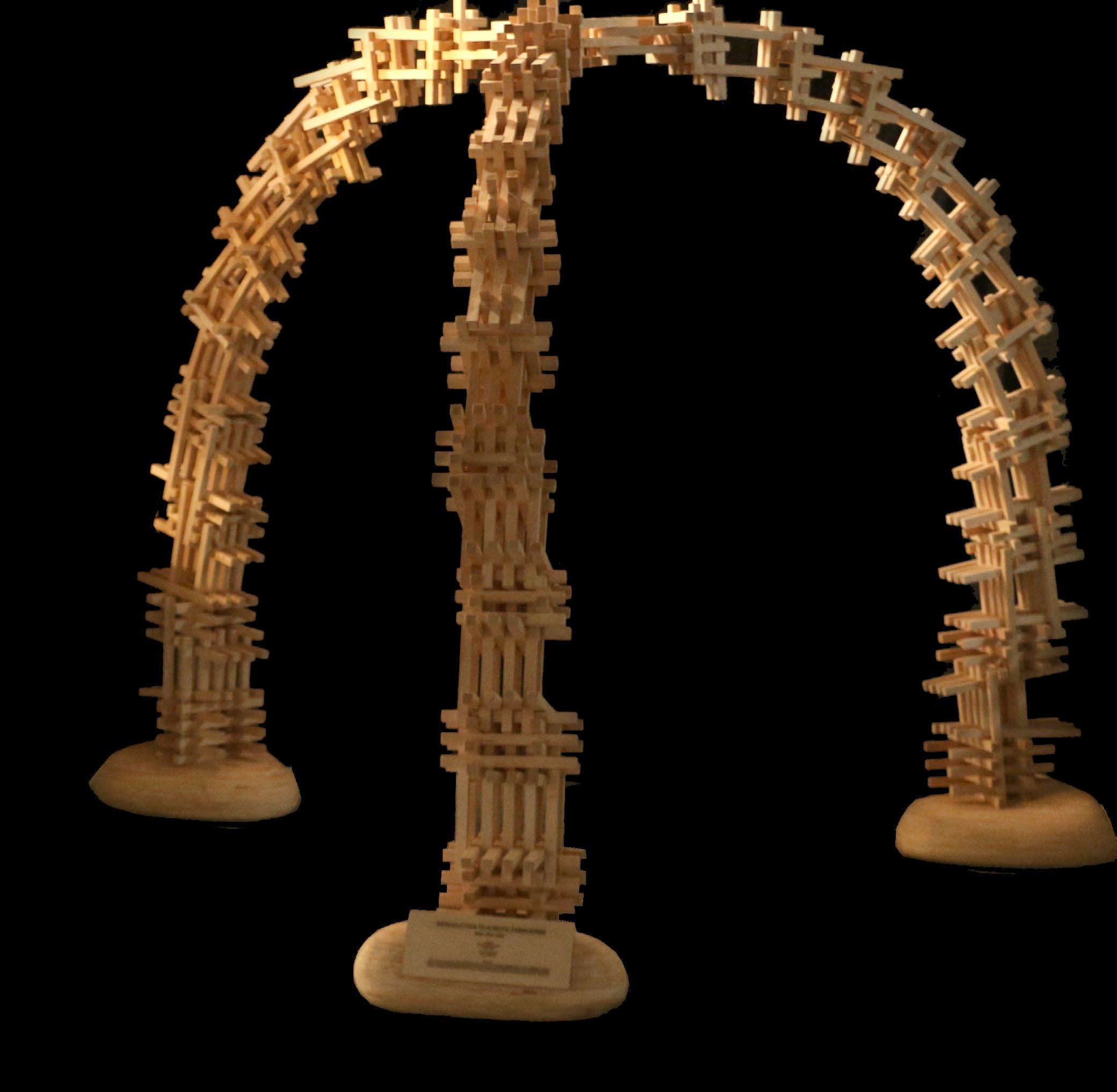
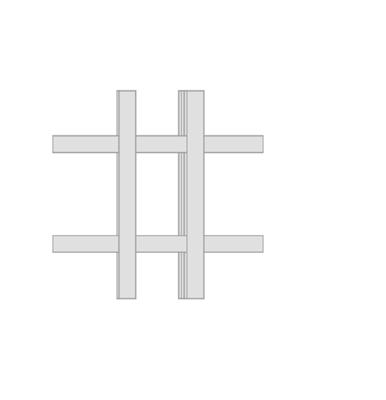
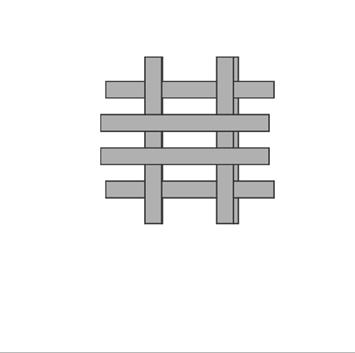
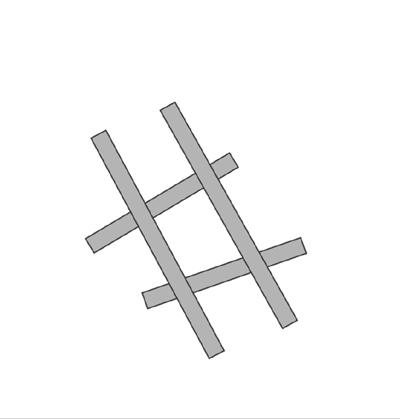
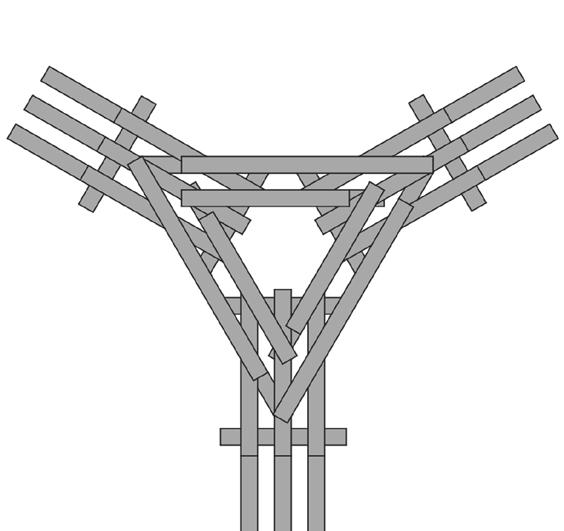
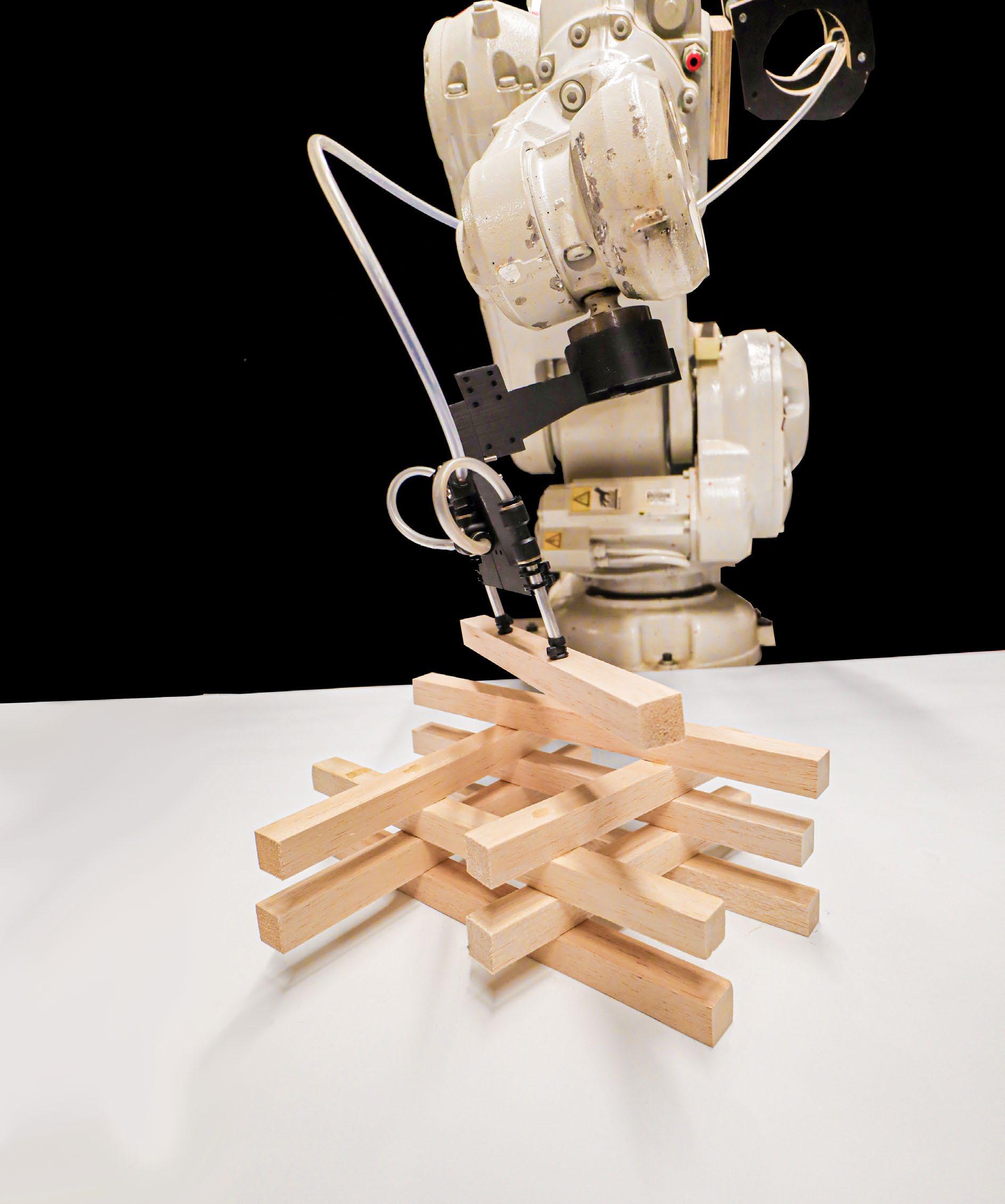
The aim of this project is to create a free standing funicular geometry with three legs. There are 19 modules per leg with a triangular middle piece to connect the legs and hold them up with tension. These legs stand at a little more than two meters in height and were completed with the help of pick and place techniques.
The robotic arms also were used to feed glue onto the sticks in order to secure them together. with this technique, minimal human interference is needed to complete this pick and place project.