1Introduction
1.1ProblemDefinition
Likeotherlean-steerplatforms(suchasbikes,skis,andsurfboards),skateboardsareinherently unstable.Muchlikeaninvertedpendulum,gravitywillcausethemtofalloverunlesstheyare perfectlyupright.Tocounteractthis,arestorativeforceisneededtobalancetheforceofgravity andreturntheridertoanuprightposition.Thisforcecomesfromturning,whichcausestherider toexperiencecentripetalacceleration,pullingthemupright.Thesetwocounteractingforcesallow theridertoreachastableequilibriumatacertainleanangle.Thisprincipleisknownas”optimal lean-steerphysics”andisthegoverningprinciplebehindmostlean-steervehicles,withonenotable exception:theskateboard.
Theturningradiusofaskateboardisdeterminedentirelybytheboard’stilt.However,the centripetalaccelerationexperiencedwhileturningisaffectedbybothvelocityandturningradius. Thismeansthatskateboardriderscannottakeadvantageofoptimallean-steerphysics,asthesame amountoftiltproducesvastlydifferentcentripetalaccelerationsatdifferentspeeds.Additionally, theboardbecomesmuchmorereactiveathighspeeds;aslighttiltintheboard’sanglecauses significantacceleration,whichcanthrowtheriderofftheboardorleadtoissueslikespeedwobble.
1.2ValueProposition
Oursolutionproposesaturningmechanismforskateboardsthatenablesriderstousethefull leaningrangeoftheboardatallspeedsbydynamicallyadjustingtheturningradiusinresponseto changesinspeedandtiltangle.Bydoingso,wecanimprovethecontroldynamicsofskateboards athigherspeeds,whichcanotherwiseposesafetyconcernsandtechnicallimitationsforriders. Thekeyobjectivesoftheproposedsolutionincludedesigningatestrigtocharacterizeskateboard stabilitywithrespecttodifferentboardandriderparametersandimplementingsensing,control, andactuationsystemsthatenableriderstousethefullleaningrangeoftheboardatallspeeds.
Thepotentialreal-worldapplicationsofthissolutionincludetransportation,purerecreation, andprofessionalskateboarding.Theadvantagesofourproposedsolutioninthemarketarethat itprovidesacombinationof(1)afullleaningrangeoftheboardand(2)anactuatedturning mechanismthatdynamicallyadjuststheturningradiusbasedontiltangleandvelocitytomore closelyalignwithleansteerphysics.Currently,thereareproductsinthemarketthataddress(1), suchasWaterborneSkateboards,and(2),suchasdampingsystemsforskateboards(JeremyFox US8752849B1)[1],butdonotaddressboth.
Incitieswithpublictransportationinfrastructure,theproposedsolutionaimstotacklethefirst mile/lastmile(FM/LM)problem.Thefirstmilereferstotheinitialpartofanindividual’strip fromthestartingpoint,oftentheirhomeorworkplace,tothepublictransportstation,whilethe lastmileisthefinalpartoftheindividual’stripfromthetransportationstationtotheirultimate destination.Anoptimizedleansteerskateboard,whichourprojectaimstocreate,willenable riderstocompletethefirstandlastpartsoftheirjourneyatafasterpaceandlowercost,thereby increasingtheadoptionofpublictransportation.
1.3SocietalContext
Fromasocietalperspective,theproposedsolutionhasthepotentialtoencouragetheadoption ofelectricskateboardsbypedestriansandincreasetheaccessibilityofroadinfrastructurethrough micro-mobility.Withnonoiseandlowemissions,therewouldbesubstantialenvironmentalbenefits.Thiswouldleadtoimprovedairqualityincitiesbyreducingcommuter-associatedpollution.

Furthermore,theproposedsolutionwouldaddresstheFM/LMdilemmaandchangehowpeople approachpublictransportation,resultinginmoreefficientandequitablepublictransportation. AccordingtorecentCensusBureaufindings,justover46%ofallpublictransportationcommuters prefertotakebusesinsteadofotherformsoftravel[2].However,transitstopsoftenonlyprovide transportationtohigh-trafficlocations,leavingmanycommuterstowalkthefirstorlastlegoftheir trip.Theproposedsolutionprovidesamodeoftransportationthatcanbridgethisdistance.This micro-mobilitycontributestoeasingtrafficbyofferinganalternativetousingpersonalvehicles. Thecostoftheproposedsolutionwouldalsohelpindividualssavemoneyonthecostofbuyinga car,maintenance,andparking.Peoplewouldhaveaquickerandmoreefficientoptionthanwalking alongwayorgettingstrandedfarfromworkorhome.
Thedownsidetotheproposedsolutionisthattheindividualswouldpreferridingskateboards ontheroadsincetherideismorestableathigherspeeds.However,trafficlawsforskateboardingon theroadaren’taswelldefinedasbicycleorin-lineskatingwhichencouragesriskybehaviorsuchas notfollowingstopsignsorhelmetrules.Therefore,itposesriskstotheridersaswellasthedrivers whomightnotbeawareofthespeedcapableofelectricskateboards.Moreover,iftheindividuals chosetorideonpavements,itposesrisksagaintotheridersaswellasthepedestrianswhomightnot havesurroundingawareness.Theproposedsolutioncanalsoencouragetheproductionoflithium whichcanbeenvironmentallydevastatingwhenmined.
2Ideation
Weexploredmanydifferentavenuesthatwouldallowustoaccomplishthisdynamicchange oflean-steerratios.LSDwantedasolutionthatwascompatiblewithcurrentskateboards,which ledustofocusoncreatingatrucksystemthatwouldbemountabletoanyskateboardusingthe standardskateboardbolt-holepattern.
Figure1:FirstMileLastMileProblem
2.1BaseplateAngle
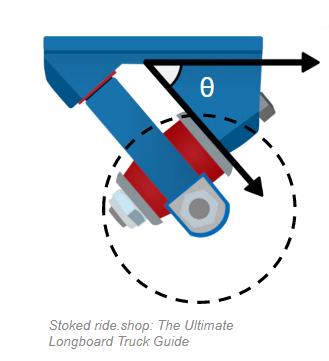
Currently,skateboardriderscanoptforreducingtheresponsivenessoftheskateboard’sturning totheirleaningbybuyingtrucksofdifferentbaseplateangles.Baseplateanglereferstotheangle ofthehangerrelativetotheboard.Thebaseplateanglewillrangefrom0to90◦.Thelowerthe baseplateangle,thelessresponsivethetruckswillbe,whilehigherbaseplateanglesresultinmore responsiveridesandrequireincreasedridersensitivity.However,changingthebaseplateangledoes notaddressthemainproblem.Lowerbaseplateangleswillreducetherider’sexperienceofspeed wobble,however,thelean-steerphysicsofthesystemremainsnotideal.Furthermore,thischangeis notdynamic.Thebaseplateangledoesnotchangewithspeed.Wedidexploredynamicbaseplate angleadjustmentasasolutionbutdeterminedthatwewouldneedtopushfurthertofindanidea thatsolvedthemainproblemathand.
2.2ElectricalvsMechanical
LSD’scurrentmechanicaldesign(Fig. 4a)allowstheridertobetteroptimizelean-steerphysics atpredeterminedspeedsbyhavinginterchangeableinserts(Fig. 4b).Thisdesignhighlightedthe problemwewereobserving:Purelymechanicalsolutionsonlysolvedlean-steerphysicsatchosen speedswithoutdynamicallychangingthroughouttheride.
Forelectronicsolutions,weexploredideasregardingbaseplateangleadjustmentwithspeed,a 3-barlinkageactuatedbyamotor,andagearsystemactuatedbyamotor.Wefoundthateach ideabroughtitsowncomplicationsfromnotsolvingtheproblemdirectly,togearstrippingunder load.However,wewereabletodeterminethatwewouldneedtoseparateleaningfromsteeringto effectivelytacklethisproblem.Wegivetherideraccesstothefullleaningrangeoftheboardatall times,andthroughacontrolsystemwecandeterminetheturningradius;dynamicallyadjusting thelean-steerratiowithspeedthroughthecontrolsystem.However,deformationunderloadwas stillanapparentproblem.
2.3FullActuation
Actuatingthehangersthatcontroltheturningradiusoftheboardwasadiscussionwehad manytimesasateamandwithLSD.Thesolution’scomplexitywasincreasingrapidlyandwe neededthesimplestwaytoactuatethehangerstoreduceanyfurtherincreaseincomplexity.We decidedtouseasteppermotorforthepositionalaccuracyitprovidesandthetorque-to-sizeratio thatitoffers.Therewouldbeamotormountedonbothtrucksandtheywillworktogethertoturn theboardbyprovidingtheirrespectivehangerangles.
2.3.1Gears
Whenexploringhangeractuation,motor-actuatedgearswerethefirstavenueweexplored. Strippingofthegearsbecameamajorconcern.Askateboardexperiencesheavyloadsunderuse. Incurrenttruckdesignsdisturbancesareusuallyhandledbytherideranddampenedbyabushing. Gearactuationwouldeliminatealldamping.Inregularusetheboarddoesexperiencewearand deformation,however,thisdeformationisneverdetrimentaltothefunctionalityoftheboard.We neededasystemthatwouldtoleratemoderatedeformationandmaintainfunctionality.
2.3.2CamActuation
AlongwithLSDwedecidedthatusingthesteeringguidecamprofilefromtheircurrentmechanicaldesign(Fig.4b)allowsustomaintainturningfunctionalitydespitemoderatedeformation
fromthefollowers,andprovidesresistancetodisturbancessuchasvibrationsandpebbleswhen riding.Thecamprofileprovidesagearreductionwhichfurtherimprovesthelikelihoodthatthe motorwouldbeabletotoleratelargedisturbancesduringaride.
3Deliverables
3.1TestRig
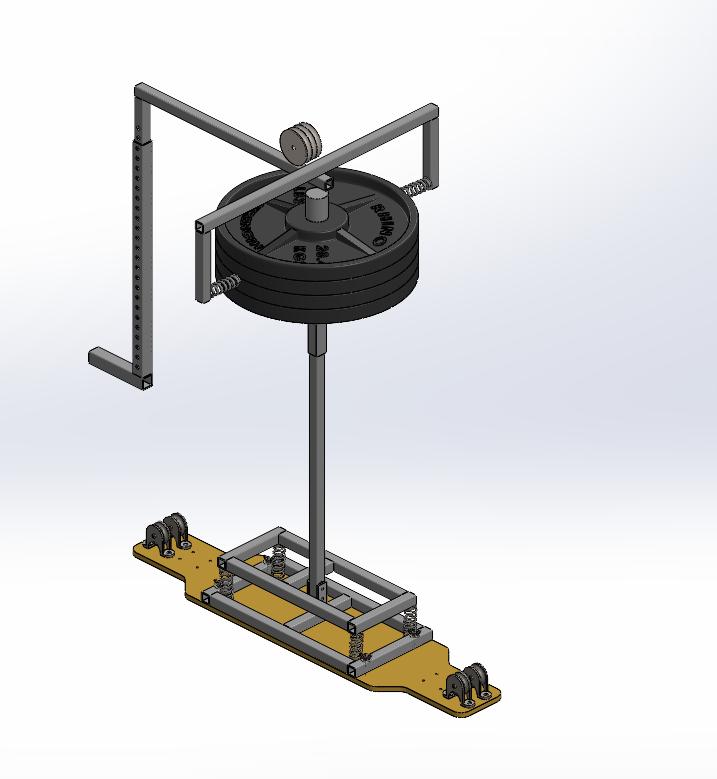
Bydecouplingleaningandsteering,weremovetherider’sabilitytodirectlysteertheboard mechanically.Thiscarriessignificantrisks,especiallysincethetechnologyisstillinitsinception. Anycodingerrors,sensorfailures,orelectricalfailureswouldleavetheuserunabletosteerthe boardmechanically.Furthermore,wewouldseethegreatestimprovementsfromthestandard mechanicalskateboardtoourproposedactuatedtrucksathigherspeeds.Asaresult,beforewe startedtodevelopthetrucks,wecreatedatestingapparatusthatallowsustotestaskateboardat thesehigherspeedswhilemimickingahuman’sweightandinteractionwiththeboard.
3.1.1MechanicalDesign
Asstatedpreviously,thistestingapparatusneedstomimicahumanrider.Anormalskateboard willexperiencegeneraloscillationsifpushedinastraightline.Therefore,weneedtoprovideour testrig’s”human”rider–affectionatelynamedJerry–themeanstocorrectfortheseoscillations independently.Ahumanwilldothisbyusingtheirabdominalstostayupright,andtheirankles tosteertheboardbackontrack.Furthermore,thistestrigneededthecapabilityofbeingdriven andtestedatmoderatelyhighspeeds.
Ourapproachwasasfollows:Toachievethespeedsnecessaryforeffectivetesting,acarmust beused.Assuch,theremustbeacomponentofthetestingapparatusthatcanbesecuredtoacar toguideittothesespeeds.However,rigidmountingwouldresultinskeweddataasthearmwould involuntarilypreventtheboardfromoscillatingnaturally.Wemustcreateacar-mountedsystem thatcanonlylightlyguidethetestingrigtostayupright.Thisprovidesagreatpointofcontact forthe”abs”.Wecreatetwoseparatecomponents,onethatattachestoacarandanotherthat attachestoaboard.Theboardattachmentwillholdthebody,orthemainweight,thatactsas theinvertedpendulumandfunctionsasthe”ankle”,whilethecarattachmentwillholdthebody uprightviasurgicaltubingtoactastheabs.
Therider’sanklewillbesimulatedusing4springs.Thespringsarerelativelystiffbutareonly slightlylessrigidthanthetruckbushings.Thisallowsthespringstofollowasimilarstiffnessto thebushingsasmoreleaningisrequiredandsubsequentlymoreforce.Thisresultsinneitherthe bushingsnorthespringsfullyengagingbeforetheotherengages.Twospringsinthefrontandback willhelpsimulatetheweightdistributionofariderinaccelerationanddeceleration.Forfurther guiding,thespringsareheldincupsandsecuredwithscrewstoallowthemtoengageinextension andcompression–reducingtherequiredspringconstantbyhalf.
Pulleysareaddedtothetruckattachmentandboardtoallowforasafetybail.Ifthetesting rigoscillatesorwillpotentiallyfall,aropewillbeallthatisrequiredtolifttheboardawayfrom thestreet.Apulleyreductionof3isshowninthemodelsuchthatasingleindividualshould beabletolifttheboardwithrelativeease.Heightadjustabilityofthecarattachmentwasalso addedtoaccountfordifferentsuspensionheightsofcarsthatmaybeused.Acustomsurgical tubingattachmentfortheweightbarwascreatedforeaseofmountingandcustomtensioningata moment’snotice.
3.1.2ElectricalDesignandSensors
Theelectricalportionofthetestingrigmustcollectdatafrombothitsownsensorsalongwith sensordatafromthetruckdesignbeingtested.Forthisreason,datamustbepassedbetweentwo Teensys–oneonthetest-rigandoneonthetruck–totrackandvalidatethesystem’sperformance.
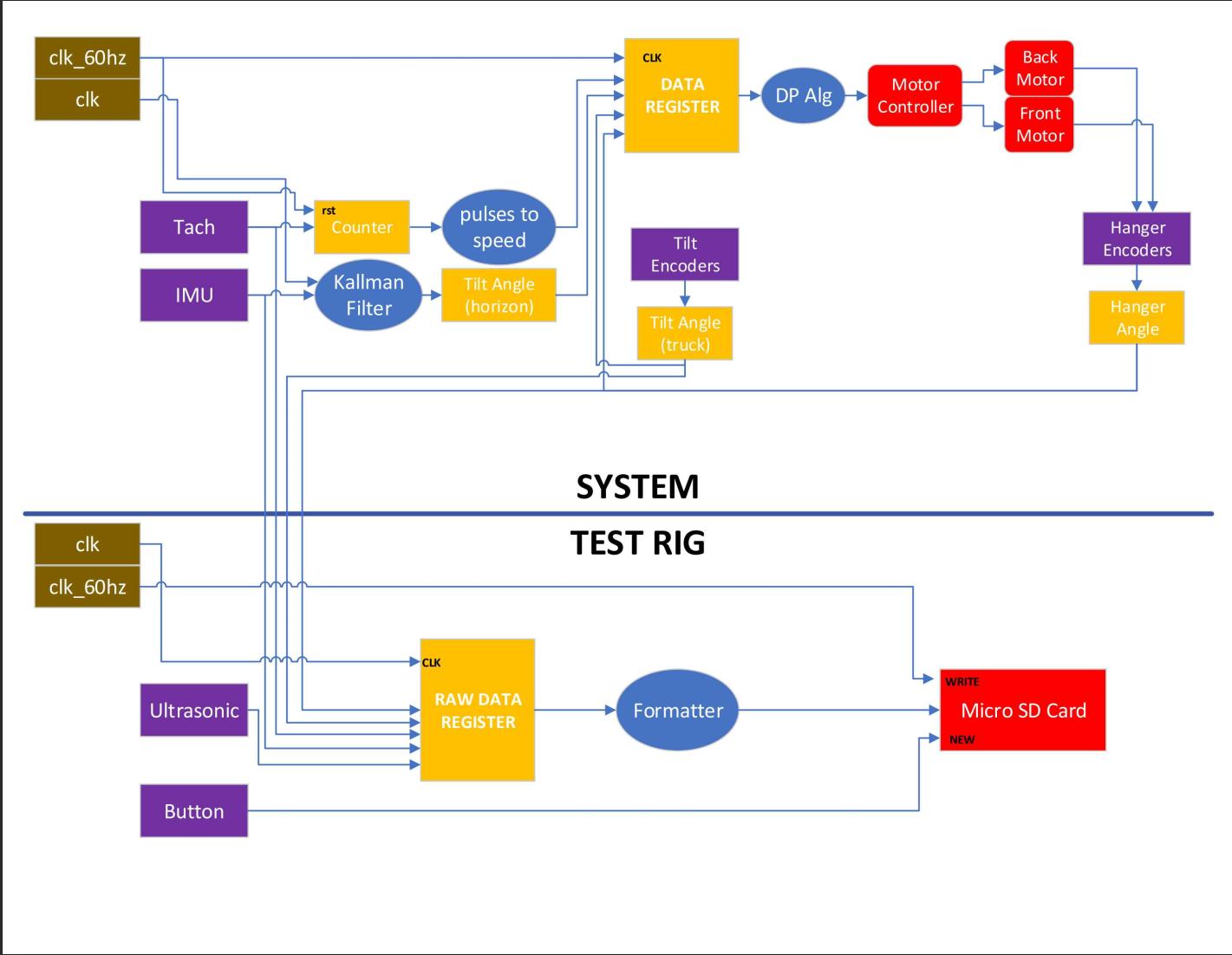
Thissortofdatahandshakingcanbeseeninappendix C.5.Thetwopartsoftheoverall environmenthavetheirownsensors,buttheseandthealgorithmsthatrunonthemmustbe tracked.ThisdataisthenwrittentoanSDcardonboardthetestingrig’sTeensy.
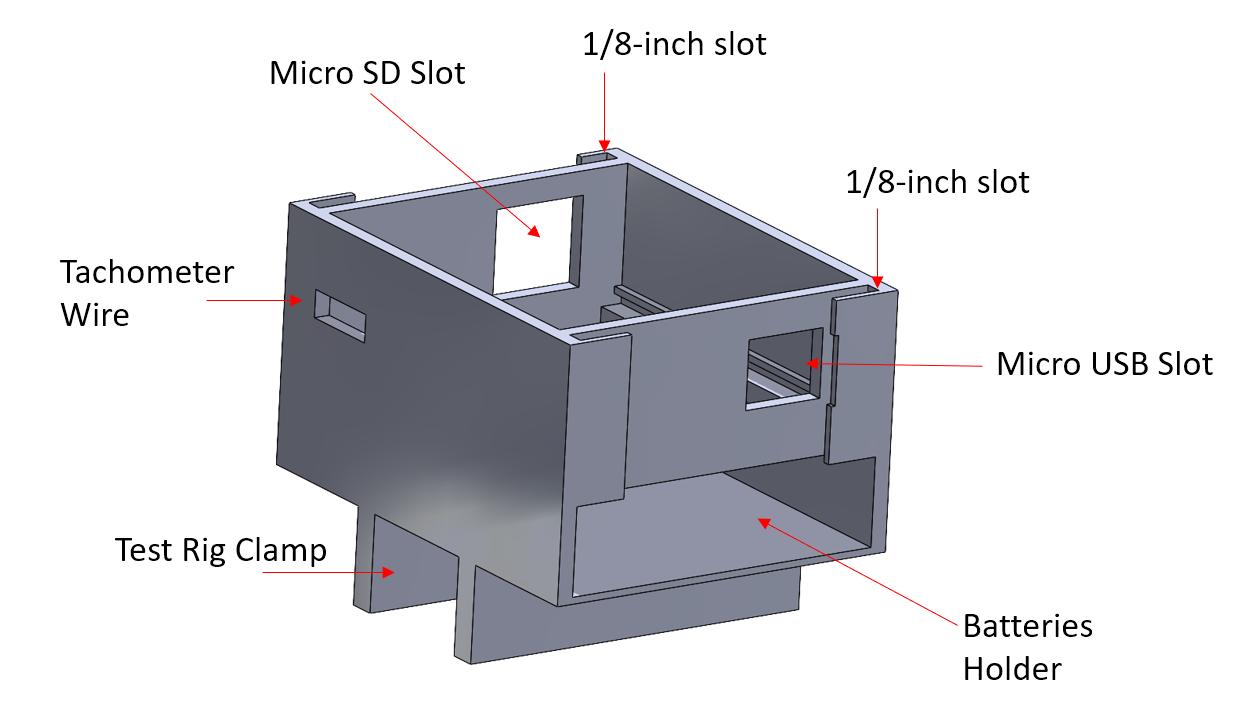
Thehousingforthetestingrigisseenbelowinfigure 3.
(a)HousingCAD
(b)HousingonTestingRig
Figure3:TestRigHousing
Forthisspecifichousing,thetopisanacrylicsheetthatislaser-cuttofitabuttonthatcreates newfiles,debuggingLED,andpowertoggleswitch.Thetwo1/8inacrylicsheetsonthesideallow ustoaccessthebatterycompartment,micro-SD,andmicro-USBwithoutpenalizingwaterand dustresistance.Thishousingsafelyclampstothetestrigwiththetwolegsatthebottom.The housingadditionallyhasaone-wayclamptosecurelyplacetheelectroniccircuitboard.Thesystem ismademorewater-resistantbyusinghotgluetosealthetopandthetachometerslot.
3.1.3SoftwareImplementation
Thesoftwareforthetestrigis,onthewhole,verysimple.Theaforementionedappendix C.5 showsablockdiagramincludingthesoftwareflowforthetestrig.Themostimportantconsideration isthatthesystemwritesanewbatchofdatatotheSDcardona60hzclockcycle.Inorderto achievethis,itmustreadthroughtheserialreceivingbufferspecifictohardwareSerialreceiver1.
Figure2:SolidWorksoftestingrig
Whatthismeansisthatthetestrigishighlyadaptabletoanyfuturedesign.Anarbitrary futuredesignmustthereforehavesomemeansofcommunicatingtothetestrigviaUARTover Serial1,whichhasitsRXandTXpinsonTeensypins0and1.Thisisimportanttoconsidershould sensorchoiceandimplementationbealtered.Generallyspeaking,datashouldbecommunicated inCSVformatfromaunitundertesttothetestrig.ThisisbecauseCSVisacompactwayto communicatethedata,anditiseasytoappendtestrigvalidationdata(liketheultrasonicsensor’s reading,orothersifimplemented)forsubsequentwritingtotheSDcard.
Thisisdescribedmorein-depthintheactualcodethroughcomprehensivecomments.ArepositoryofallcodewillbedeliveredtoLSDinazipfilealongwiththisreport.Thecodespecificto thetestrigispresentinthetest-rigsubdirectoryseeninfigure 11
3.2TruckMechanics
LeanSteerDifferencecametouswithapurelymechanicaldesignforatruckthatwould allowcustomizablelean-steerratioinserts.Thisletstheriderbetteroptimizelean-steerphysics atapredeterminedspeed.However,atspeedslowerandhigherthanoptimal,theriderwould needtooverorunder-steer,respectively.Thistruckdesignwasourstartingpoint.Thedynamic adjustabilityoflean-steerphysicswouldbecontrolledbyamotor,andcontrolalgorithm.
Figure4:AbovearethemaincomponentsofLeanSteerDifference’soriginalmechanicalunpinned truck.
3.2.1ReturntoCenter(RTC)
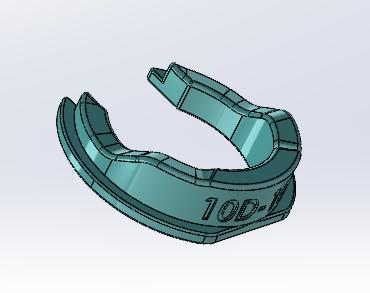
LeanSteerDifferencebroughtusaredesignconceptofthereturntocentercreatedbyHelix DesigninManchester,NH.ThedesignwasbasedonOriginalSkateboards’truckandfollowsthe sameconceptbutusesahigh-constantspringratherthanurethane.TheconceptbyHelixDesign usesashallowcamprofilethatwillcompressaurethanecylinderastheboardtilts.Wewouldneed tofabricatetrucksinordertoproperlytestthedynamictrucks,soweoptedtocreateaprototype oftheconcepttoverifythetorqueitwasproducingbeforeredesigningandfabricating.Thenew designhadmuchfewerpartsandalowerprofile,whichwefavoredbecausetheadditionofamotor resultedinalackofspaceundertheboard.
Bymountingitonatestshaftandusingatorquewrenchwewereabletovalidatethetorque producedbythecamdesigntopeakingat29.5oz-inoftorquewithnoinitialcompressionofa
(a)Fullmechanicalunpinned truck
(b)SteeringGuide
(c)ReturntoCenter
95AurethanecylinderwithanODof11/8”andIDof0.5”(Appendix C.2).Withtheaddition ofthenewRTCcam,thisprojectnowhas2camprofiles;thefirstisassociatedwiththeturning ofthehangerandisseeninFigure. 4b.Toreduceconfusion,wehaveusedthefollowingnaming convention:RTCcamprofileisnowcalledthe”Tulip”andthetruckhangercamremainsthe ”cam”.
3.2.2Actuation
Aspreviouslydiscussed,theturningofthehangerisguidedbyacam(Fig. 4b).Thiscam profilewasmodifiedfromoptimizinglean-steerataparticularspeedtobeasmoothtransitionand allowsforthewholesteeringrange.Forinitialtestingwegavethecamtheabilitytoprovide ±15◦ ofrotation.Thiscamprofilewillhaverollersthatinteractwithittorotatethehanger.Theswept profileofthecamworkssuchthatthehangerhassupportfrombothsides.Asonesideofthecam pushestoturn,theothersidegivesanequalamountofspacetomaintaincontactatallangles.
Figure5:(a)Redesignedcamfor ±15◦ ofhangerrotation.(b)AprototypeoftheTulip.Thiswas aniterationthatusedapintokeeptheTulipfromrotatingandwaslaterreplacedbyatwo-sided Dshaftthroughhole.
Wedecidedtomounttherollersonthetruckhanger,andthecamtothemotorbecausecan properlysecurethecamtothemotorbywayofsetscrew.
3.2.3CombinationofMechanisms
Combiningthesetwomechanismswhilemaintainingtheirindependentmovementwasacomplex task.ThenewRTCreducespartsbutincreasesthecomplexityoftheinteractionsbetweenmoving elements.TheboardneedstotiltaroundtheRTC,buttheRTCneedstoslidetocompressthe urethane.Therefore,somethingneedstokeeptheRTCfromrotatingwiththeboard.HelixDesign hadtwosmallslotsextendingthelengthoftheshafttoguidetheTulip,however,fromtesting withasteelprototypewefeltthattheywoulddeform,andbreak,underafullloadofarider.We optedforadouble-sidedDshaftthatextendsthelengthofthetruck.Despitetheincreasedarea providedbythedouble-Dshaft,theRTCstillproducesalotoftorque,especiallywhenpreloaded
(a)Hangercam
(b)TulipPrototype
forstifferleaning.Asaresult,anyplasticdesignwouldbeshort-livedbeforethedeformationlead tobreakingandexcessivebacklash.Assuch,wefabricatedanaluminumtrucktowithstandleaning andtestingunderload.However,giventimethisaluminumtruckwillalsodeform.Temperingthe aluminummaybeasolution,butpleaseseeSection. 5.2 forrecommendationsaboutmovingaway fromthecurrentdouble-Ddesignandtomorerobustsolutions.
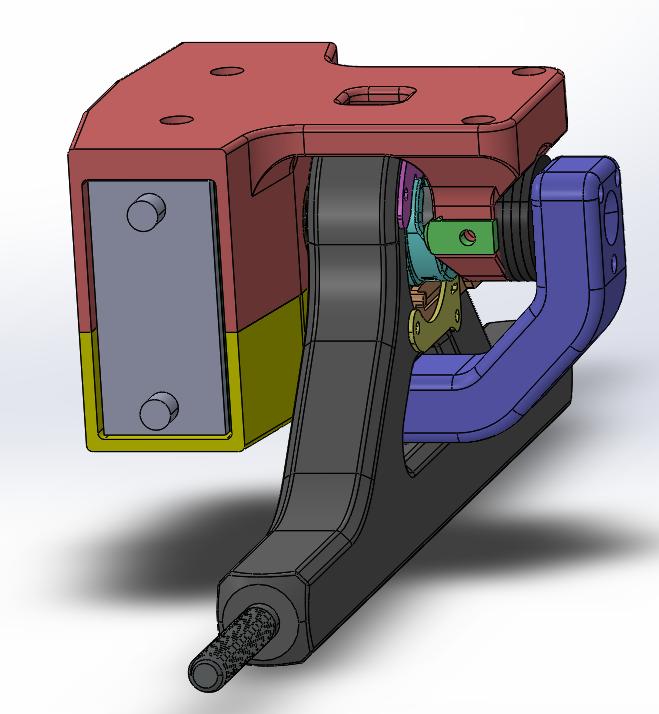
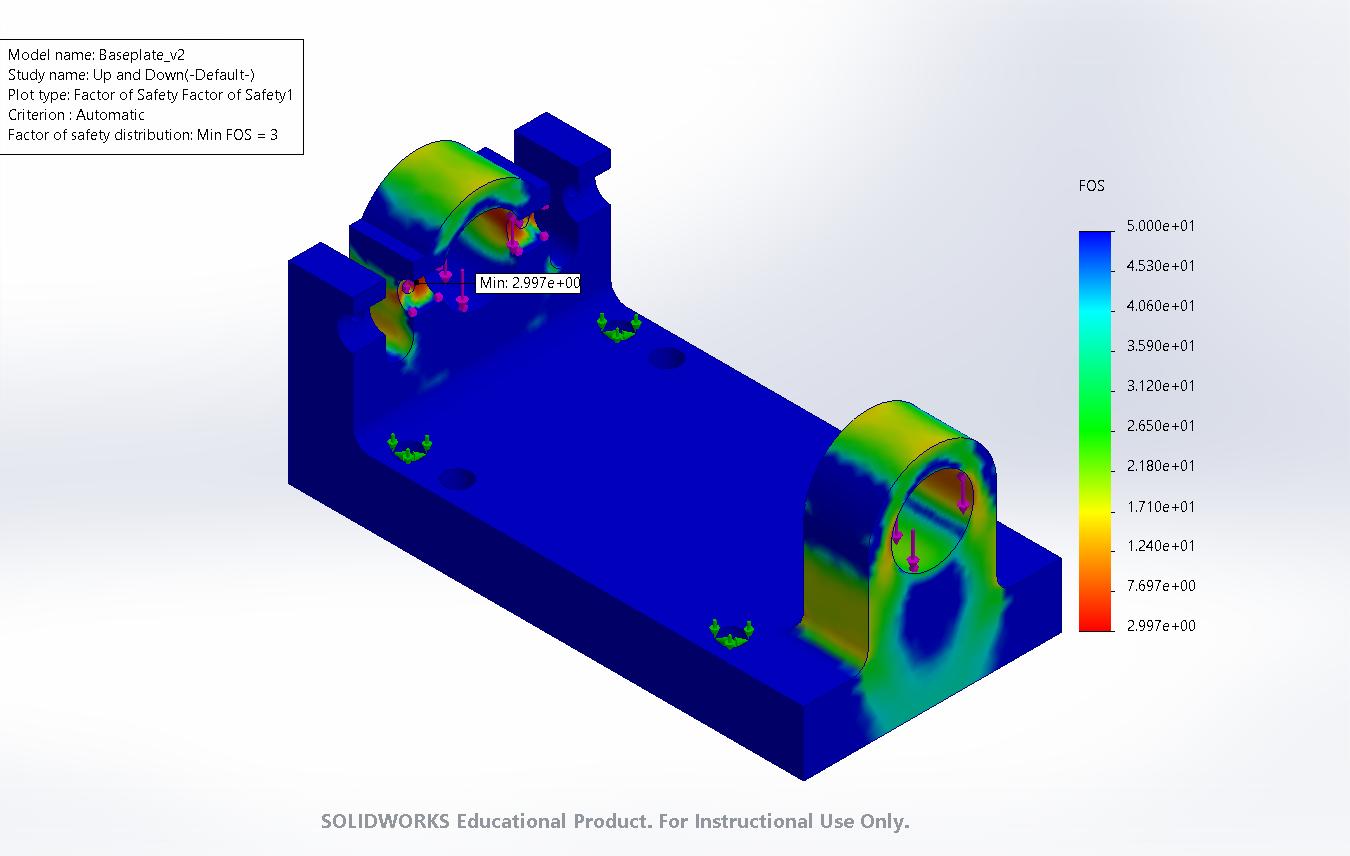
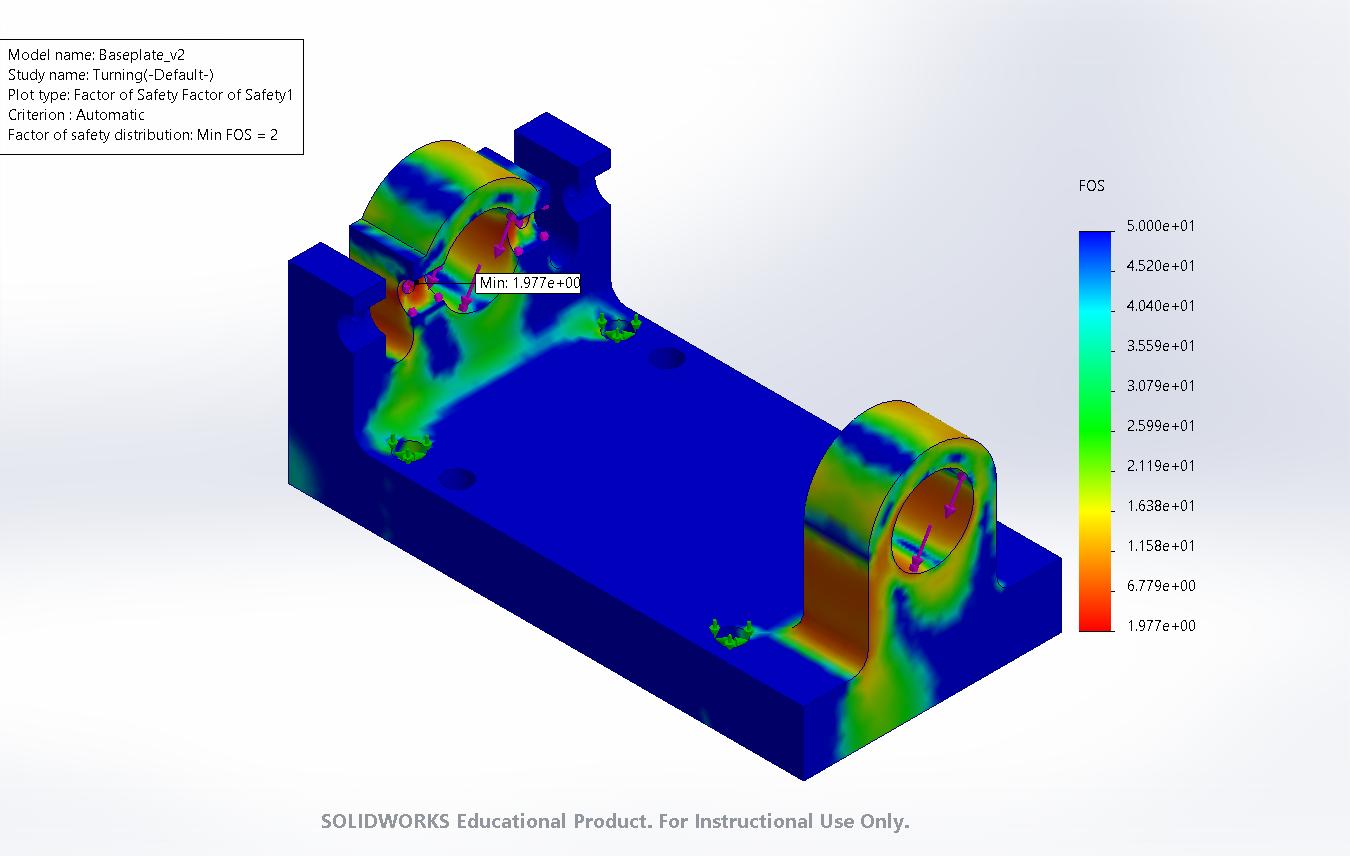
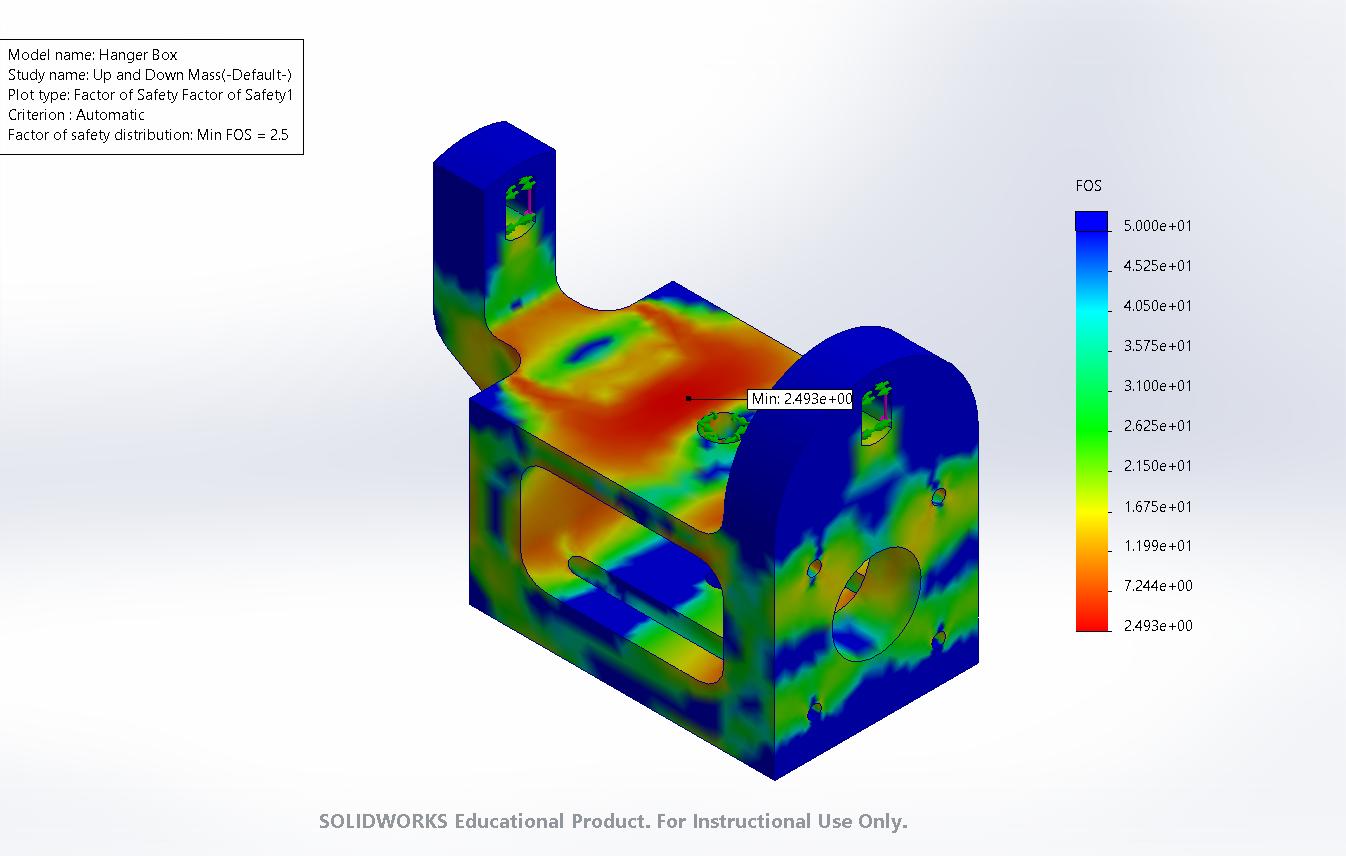
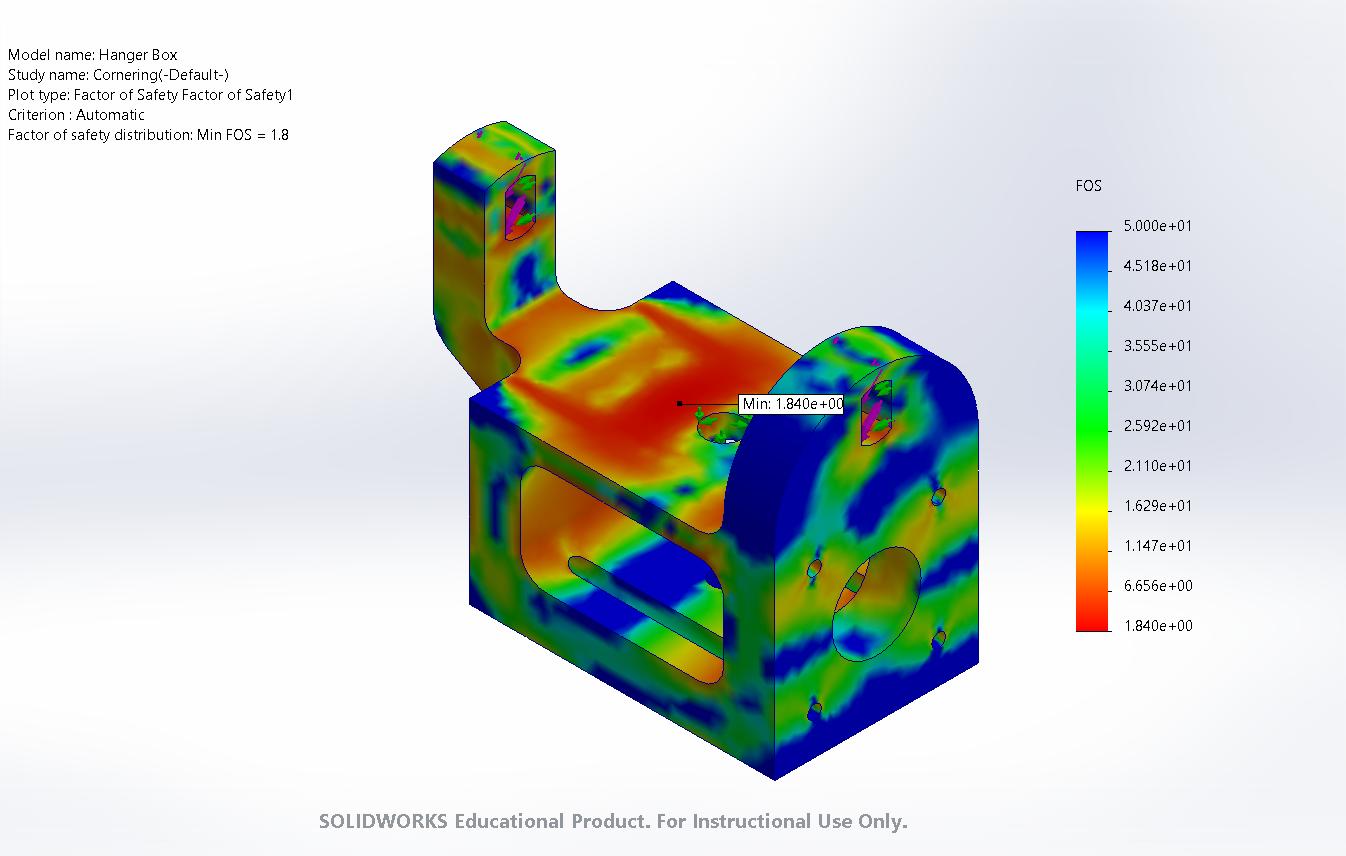
Theshaftisadeadaxle.Itonlysupportsthemechanismsrotatingaroundit.Assuchitcreates anoptimalsecuringlocationforthemountingandhousingofthemotorandhanger.Thishousing isneutral.Itdoesnotspinorrotatewitheitherhangerorboard.Withallofthisinmind,wewent throughafewdesigniterationsbeforelandingonthedesignwefabricatedandusedfortesting. Ratherthanmakingasleekdesign,weoptedforathickerandmorerobustlookfortesting.We performedFiniteElementAnalysis(FEA)onalloftheload-bearingcomponents,however,this systemisstillnotfullycharacterized,andassuch,weneededadesignthatwasover-designedto providetheleastlikelihoodofbreaking.Weperformedastaticanalysiswherea200-poundperson putalloftheirweightononeofthetrucks,aswellassimulatingtheobliqueloadsexperienced duringaturn.TheresultscanbeseeninFigures 24 and 25 ofAppendix C.3.
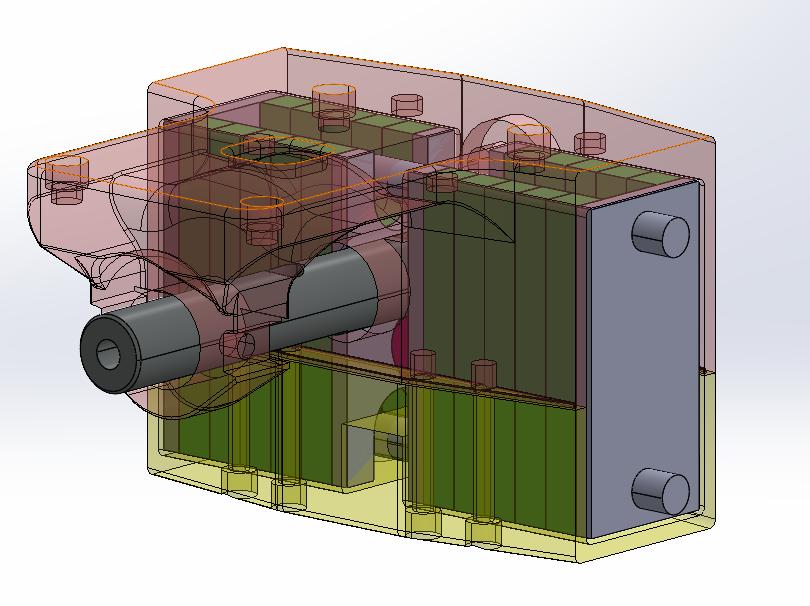
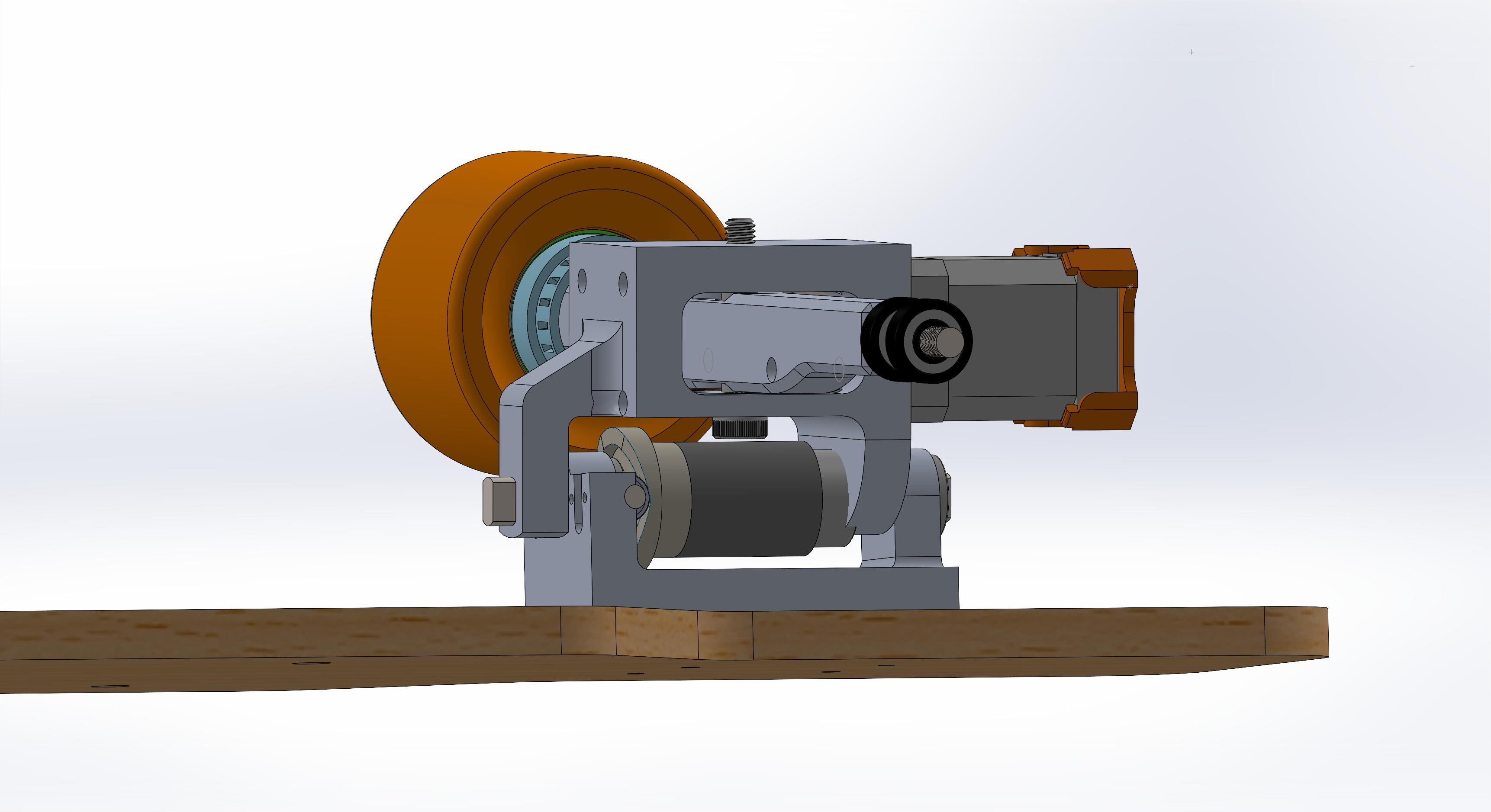
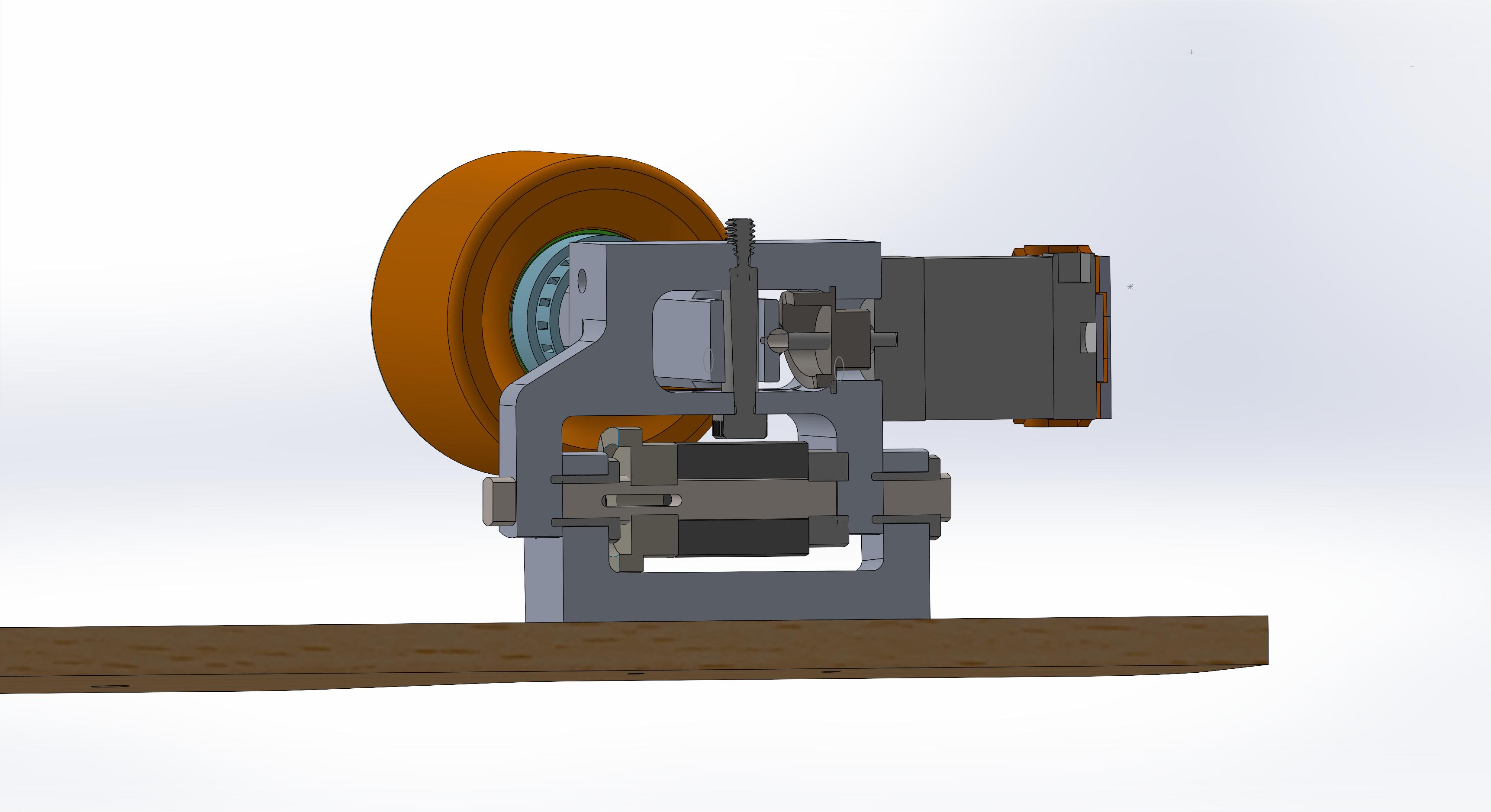
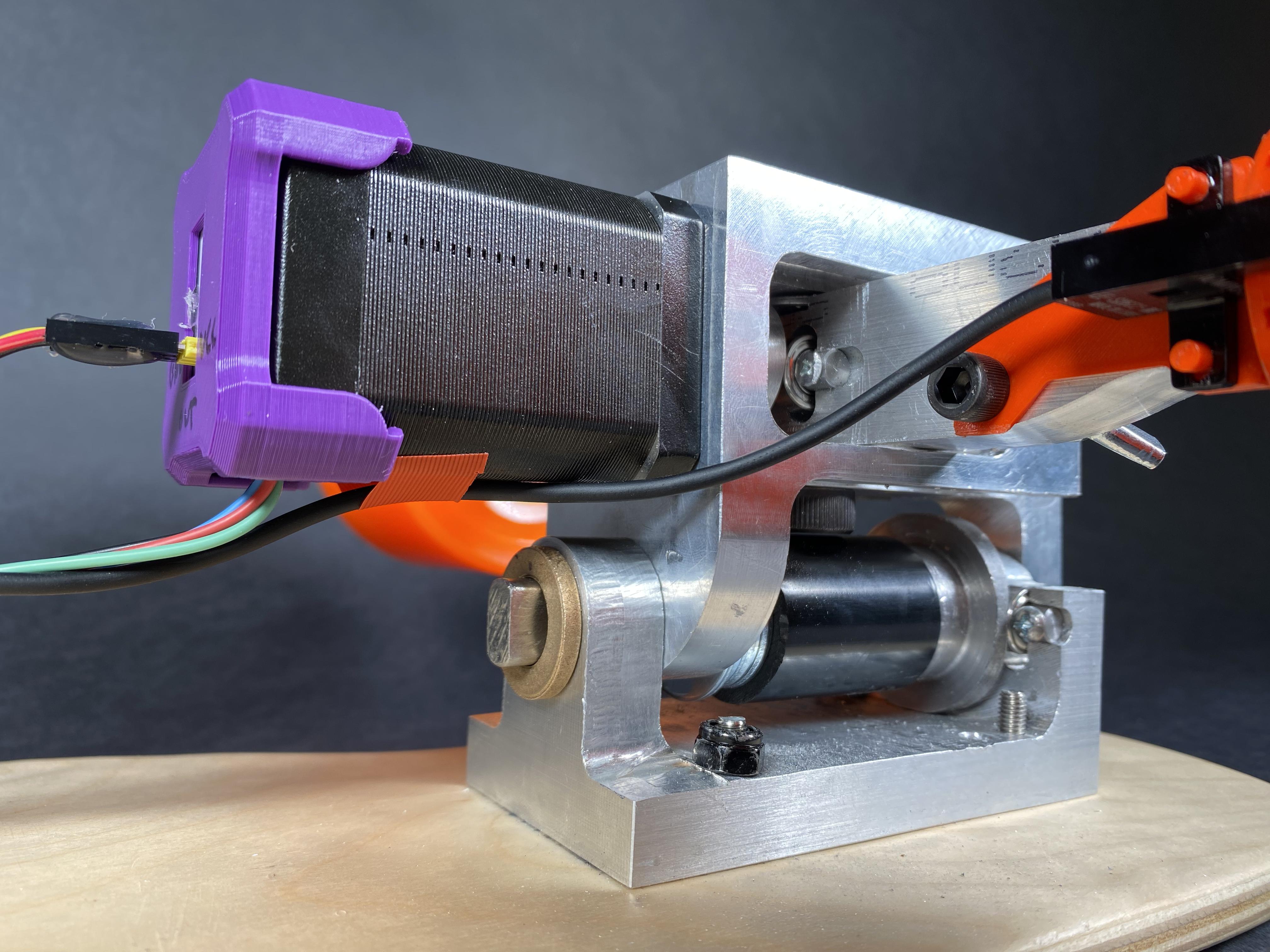
Figure6:(a)Prototypedesignoftheelectronictrucksandasectionviewofthecomponents(b).
3.3TruckElectronics
3.3.1Motors
ThemotorusedinoursystemisaNEMA17StepperMotoravailable fromMcMaster.We wantedtohaveahighamountofholdingtorquewhilemaintainingasmallpackagesizeandaccurate rotationcapabilities.AsseenonMcMaster,thismotoroperatesat12-24Vandhas125in-Oz.of torque.Althoughthismotorwasabletotwistthehangersusingthecamwithnoweightonthe board,itstruggledtodosowithevenaminoramountofweightbeingimpressedupontheboard. Motorselectioniscertainlyanaspectofthedesignthatcanbeimprovedandwillbeexploredin latersectionsofthisdocument.
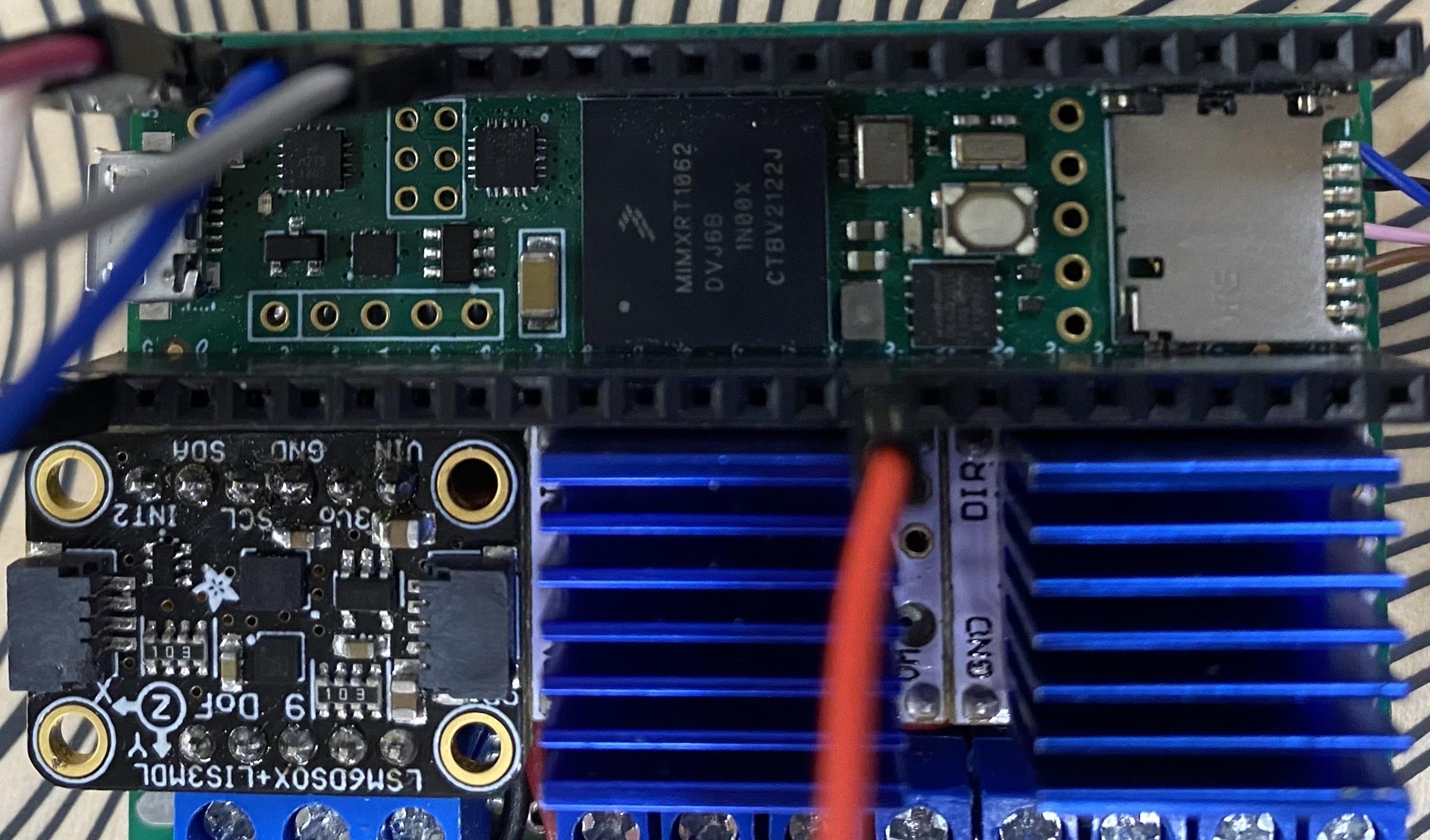
Inordertopowerthesemotors,weoptedtousethe TMC2208StepperDriver.Thesearea low-cost,easy-to-useoptionfordrivingmotorsfrom12-24V,whichiswhatwewereaimingtodo withouraforementionedNEMA17steppers.Thetwocontrollersusedbythesystemcanbeseen infigure 7 withtheblueheatsinksattheright.
3.3.2Sensors
Thereareafewdifferentsensorsusedtogatherthenecessarydatausedasinputstothecontrol loop.Thedatatobegatheredincludesgroundspeed,boardorientationwithrespecttothehorizon,
(a)
(b)
Figure7:TeensywithGyroandMotorControllers
andtheangleofthehangersrelativetotheboard.Allsensordatasheetsareprovidedwithinthe softwarehandoffzipfileunderthedocssubdirectory.
Inordertomeasureboardgroundspeed,weusedanOMRON EE-SX-672-WRPhotomicrosensor.Weacquiredoursensorfrom Adafruitatthislisting.Thesensortransistoroutputnominally uses5V,butbyenablingapull-upresistorinternallyontheTeensy,itisabletobeusedat3.3V. Thesensorisusedonadigitalinputpinasadigitalinterrupt,andeachtimeaninterruptisreceived acounterisincremented.
Figure8:EE-SX-672-WRMountedonTruckHangerswithCustomEncoderDisk
Thesensordetectswhenitsbeamisbroken,meaningthatacustomrotaryencoderwheelwith slotscouldbeusedwithourtruck’sskateboardwheelstocountpulsescorrespondingtoatwentieth ofarotation.Thesepulsesareusedeverysixtiethofasecondtogenerategroundspeed,thenthe counterisrefreshedforthenextcycle.Themountedsensorcanbeseeninfigure 8.Ofnote,the sensorislistedfora1khzminimumtopresponsefrequency.Weaimedtoavoidexceedingthis frequency,aswecouldnotguaranteeaccuratefunctionalitybeyondthisfrequency.Forthisreason, wedeterminedthattwentypulsesperrotationwouldbeasuitablechoice.Itresultsinourtarget
of1kHzat30mph,asseeninequation 1
Given:
1. Wheelradius=.0425m
2. Mphtom/sratio=.44
3. Maxgroundspeedof30mph
4. 20pulsesperrotationoncustomencoderdisk
(30 ∗ .44) (2π ∗ 0 0425) 20 ≈ 988(pulsespersecond)(1)
EE-SX-672-WR Teensy4.1
VCC(Brown)
5V(ordirectto4.5Vbattery)
LED(Pink) 5V(ordirectto4.5Vbattery)
Output(Black) 38(PullUpRequiredinCode) GND(Blue) AnyGND
Table1:EE-SX-672TerminalArrangementwithTeensy4.1Connections
AccordingtotheTerminalArrangementavailableontheOMRONlisting,thebrownandpink wiresbothreceiveVcc,whilethebluewireisgroundandtheblackwireisthesignaloutput.This isimportanttotakenoteofgiventhattheblackwireisthesignaloutput.Thiscanbeseenin Table 1
Inordertotrackboardorientation,an LSM6DSOXfromAdafruit wasused.Itprovides3-axis gyroandaccelerometerdataviaI2Coneither3.3Vor5V.Itwasanobviouschoiceduetoitssmall size,pricepoint,andeaseofuse.ItissimplymountednexttotheTeensyinitshousing,andit mustbelevelwiththesurfaceoftheboardasseeninthebottomleftofFigure 7.
LSM6DSOX Teensy4.1 Vin Any3.3V GND AnyGND SCL 19(SCLCapable) SDA 18(SDACapable)
Table2:LSM6DSOXArrangementwithTeensy4.1Connetions
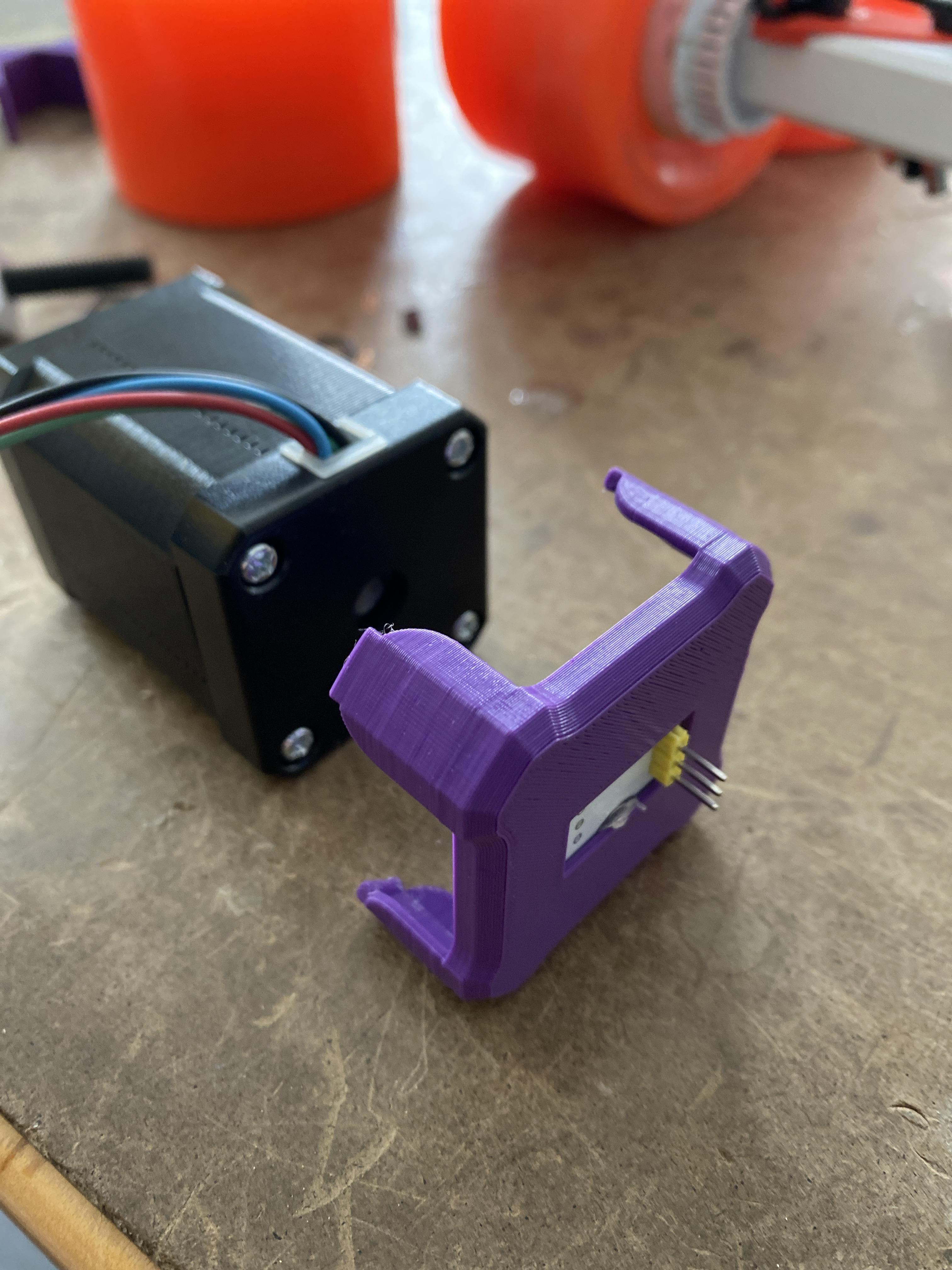
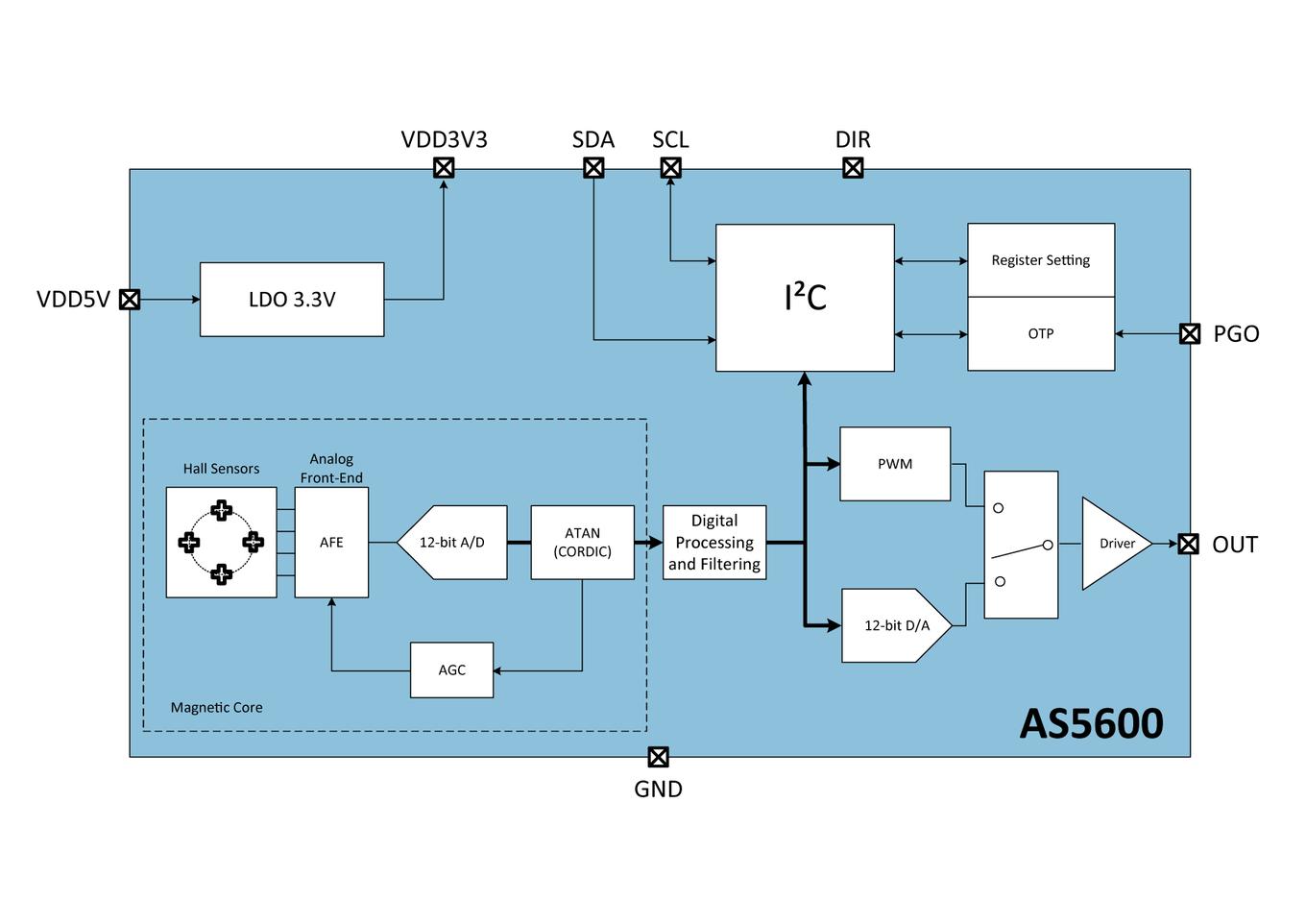
Thesensorusedtomeasurehangerangleisthe AS5600PositionSensor fromams-OSRAM.It isachipthatisabletodetectvariationsinamagneticfieldgeneratedbyasmallmagnetattached toarotaryelement.Inourcase,thiswasasmallmagnetepoxiedtothebackoftheshaftofthe motorusedtorotatethetruckhangers.Thecustommountandmagnetlocationcanbeseenin figure 9.
Thissensorcomeswiththecapabilitytorunoffofboth5Vand3.3V,whichisconvenientfor our3.3VTeensy’susage.Itcanalsooutputitsreadingseitherviai2cora12-bitDAC.Because weknewthatwewouldbeusingatleasttwoofthesesensors,wechosetousetheanalogmode duetothepotentialheadacheofchangingthei2caddressofoneormoresensorsforconcurrent usewithinoursystem.Suchcapabilitiescanbeseeninfigure 10,takenfromtheaforementioned ams-ORSRAMlisting.
OursupplierforaPCBusingthischip–accessibleat thisAmazonlink fromQCCAN–implementeda3.3Vspecificboard,andthisiswhatwechosetouseduetoitsinexpensiveprice pointandeaseofusewiththeTeensy.Delivering3.3Visaseasyaspoweringitfroma3.3VVcc railontheTeensy,anditsanalogoutputcanbereadwithanyoftheanalog-capablepins.Ofnote, theR4resistormustberemovedtoenableanalogoutputmodeforthisspecificPCB.Giventhat Amazonlistingscanandlikelywillchangeinthefuture,anyPCBimplementingtheAS5600can likelybeused.Itisimportanttomakesureasimilarresistorpull-downisnotedandaddressedif presentaswiththePCBweused.
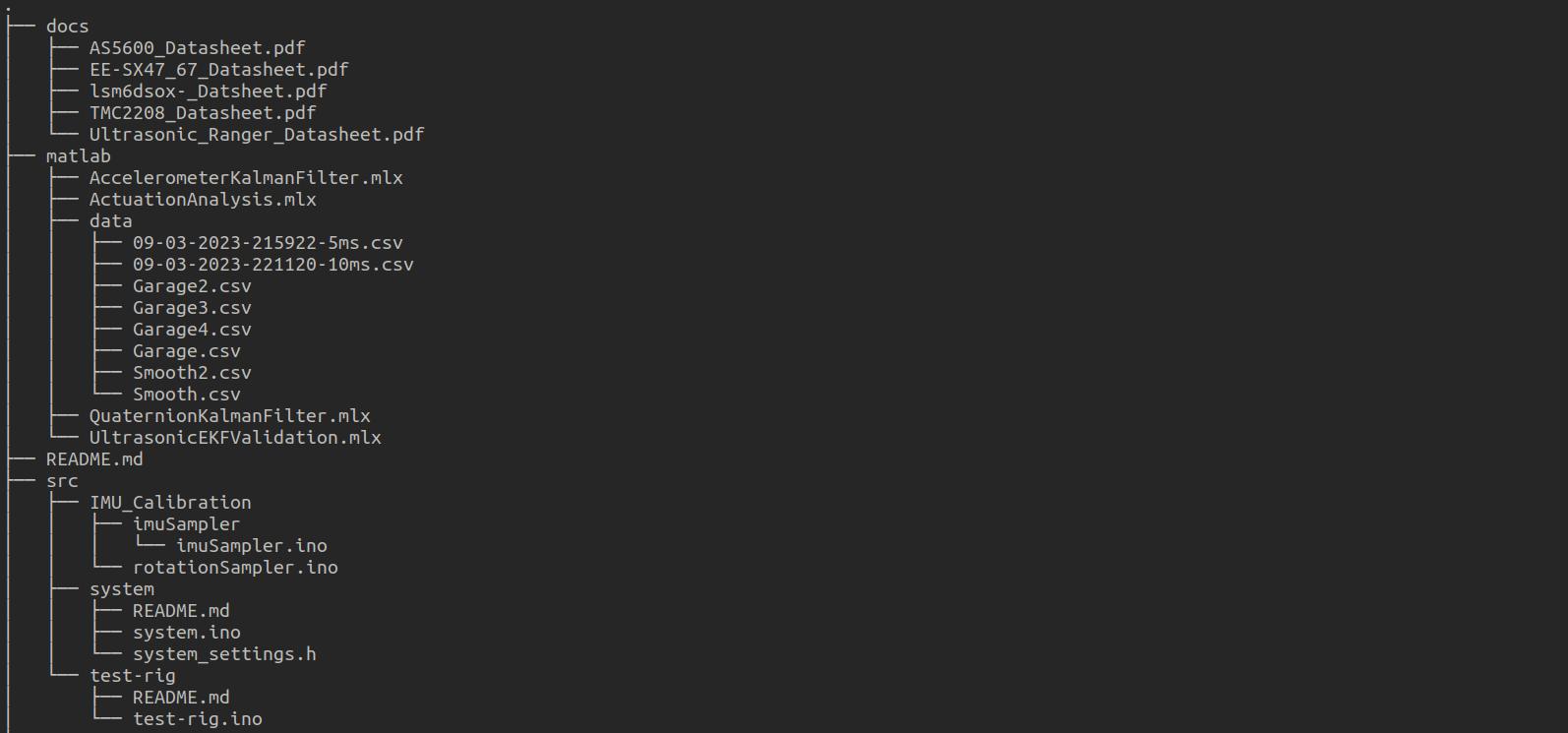
Datasheetsforeachsensorusedinthetruckdesign(andadditionallythetestrig)arelocated inthedocssubdirectoryofthedeliveredsoftwarerepo,asseeninfigure 11
3.4TruckSoftware
Thesoftwarerepositoryusedtocontrolourdynamictruckswillbedeliveredinazipfileto LSD.Therepository’sgeneralstructurecanbeseeninfigure 11.Thecodespecifictothetrucksis
Figure9:AS5600MountingSystem
Figure10:AS5600BlockDiagram
withinthesystemsubdirectory.
Figure11:DeliveredSoftware
ThecontrolalgorithmispredominantlyimplementedinArduinocode,alanguagedesignedby Arduinosoftwarecreators.ItsimplifiesC/C++capabilities,eliminatingtheneedforsettingup Makefilesandothercomplexities.Consequently,alltruckcodeisexecutedasArduinocode.
Giventhetruck’sreal-timeresponsetoclock-basedandinterrupt-basedevents,globalvariablesandvolatileflagsareessentialfordataaccessibilityacrossmultiplefunctions.Althougha class-basedsystemcouldprovebeneficialforfuturedevelopment,timeconstraints,andmultiple contributorshindereditsimplementation.
Despitethelimitedtime,thecoderepositoryiswell-documentedandpreparedforongoingdevelopmentandversioncontrol,makingitanidealfoundationforadvancingthetechnology’ssoftware maturity.Itencapsulatesnumerouslessonslearnedinembeddeddevicesoftwaredevelopment.
Futuredevelopersshouldeasilycomprehendthecode’sgeneralstructurebyexaminingthe providedrepository,whichoffersampleopportunitiesforimprovement.
3.5FilteringandControl
Toachievepreciseturningradiiconsideringspeedandleanangle,wedesignedacontrolalgorithmtomanipulatethetrucksusingsystemdata.Thealgorithmencompassesanextended Kalmanfilter,adynamicsfunction,andafeedbackmotorcontroller.
3.5.1ExtendedKalmanFilter
Atthebeginningofeverytimestep,thesystemcollectsdatafromallitssensors.ThecompositionofthesemeasurementscanbeseeninEquation 2 where ω istherotationratevectorin thebodyframe, a isthegravitationalaccelerationvectorinthebodyframe, v isthespeedofthe board, θ1 istheangleofthefronttruck,and θ2 istheangleofthereartruck.
Intheirrawstate,thesemeasurementsonlyprovidepartialinformationneededforsystem control,andtheyareaffectedbynoiseduetouneventerrain.Thesefactorspromptedusto developafilterthatestimatestheboard’sorientationandsmoothsoutnoisefrommeasurements.
Morespecifically,wedevelopedanExtendedKalmanFilter(EKF),atypeofobserverfor systemswithnon-linearstatetransitionandmeasurementequations.Inthiscase,anEKFis requiredoverastandardKalmanfilterbecauseattitudedeterminationisanon-linearproblemwith non-linearitiesinboththestatetransitionequationandthemeasurementequation.Itachieves thisbylinearizingthesystemaboutthecurrentstateateachtimestep.Weneededtodefineour state,whichcontainsallthepropertiesrequiredtodescribeoursystem,namelytheorientationand rotationratesofthesystem,alongwithspeed,andthetruckangles.
Therearemanypossiblechoicesofparametersetstodescribeorientation,andourinitialchoice was3-2-1EulerAngles,alsoknownasyaw,pitch,androllangles.Thissetdescribesarotation ψ aboutthe z axis,arotation θ aboutthe y axis,andarotation ϕ aboutthe x axis.Thissethas thebenefitoftherollangle ϕ equalingthetiltangleweneedfortherestofourcontrolalgorithm. However,aswefoundoutinimplementation,thisparametersethasdrawbacks.Lookingatthestate transitionequationsfor3-2-1EulerAngles(Equation 3),wefindtheseequationsarehighlynonlinear,withproductsoftrigonometricterms.Additionally,therearesingularitiesaround θ = ±90◦ Althoughtheboardhopefullyshouldneverbeintheseorientationswhileriding,theycouldstill causeissuesifsomeonewerecarryingtheboardorleaningitupagainstthewall.
Becauseofthesefactors,inourfinalEKF,weendedupoptingforquaternions,a4-parameter setforrepresentingorientations(β0 ,β1 ,β2 ,β3 )whicharenon-singularandhaveamuchsimpler statetransitionequation(Equation 4).
Additionally,thetiltanglecaneasilybecalculatedusingEquation 5,whichremovesanyadvantagethata3-2-1EulerAngleEKFholdsoveraquaternion-basedfilter.
Wecancombinethequaternionorientationrepresentation(β),rotationrates(ω),speed(v), andtruckangles(θ1 ,θ2 )intothesystemstatevector(x),whichisshowninEquation 6
Havingestablishedthestatevectorcomposition,thesubsequentstepinvolvesdeterminingthe statetransitionandmeasurementequationsofthesystem.Thestatetransitionequation’sform isevidentinEquation 7.Sincetherearenoexpressionsrelatingourstatevariablestotherateof changeof v, θ1 ,and θ2 ,wehave˙v = ˙ θ1 = ˙ θ2 =0.Consequently,allchangesinthesevariablesare assumedtoresultfromexternaldisturbances.
Equation 4 provides ˙ β,whiletheequationsofmotionforarotatingrigidbodyoffer ˙ ω,as depictedinEquation 8.Byassumingthatthebodyframealignswiththesystem’sprincipalaxes, thecalculationisconsiderablysimplified,eliminatingtheneedtoinverttheinertiatensor[I].The precisevaluesinourinertiatensorcanbefoundinAppendix E.
Lastly,sincetheEKFoperatesataconstanttimestep∆t,itisnecessarytodiscretizethestate transitionequation.WiththeEKFrunningatahighfrequencyof240Hz,afirst-orderdifferenceapproximationsuffices(Equation 9),negatingtheneedformorecomputationallydemanding methodslikeRunge-Kutta.BycombiningEquations 4, 7, 8,and 9,thestatetransitionequation isobtained.
Subsequently,anexpressiondepictingoursystem’smeasurementsisrequired.Thegeneralform ofthisexpressionispresentedinEquation 2.However,arepresentationof a intermsofourstate variablesisneeded.Byconvertingthequaternionrepresentationoftheboard’sorientationtothe correspondingdirectioncosinematrix,wecanmultiplythisbythenormalforceaccelerationvector, whichis9.81 m/s2 intheinertial z direction.Thisyieldsthemeasuredbodyframeacceleration, asdemonstratedinEquation 10.
WenowhavethemeasurementequationforourEKF.Additionally,theEKFnecessitatesthe processandmeasurementcovariancematrices Q and R ofthesystem.Wederivedthevaluesfor R usingthesquareoftheRMSerrorvaluefromtheIMUdatasheet,assumingalloff-diagonal termsofthecovariancematrixwere0.Thecovariancesofspeedandanglemeasurementswere unknown,andtheirvaluesweredeterminedthroughtrialanderror.Similarly,theprocessnoise Q wasunknown,anditsvalueswereestablishedbytrialanderror.ThematricesusedintheEKF canbefoundinAppendix F
TheEKFwasinitiallyimplementedinMATLABandtestedondatacollectedusingthetest rig.Testrunswereconductedonbothsmoothandbumpysurfaces,withtheultrasonicsensoron theplatformservingasaverificationmethodtoensuretheEKFvaluescorrespondedwithreality. TheresultsofthesetestsaredisplayedinFigures 12 and 13.
Ascanbeseen,whenthegroundgetsrougher,theperformanceoftheEKFalsogoesdown. Thatsaid,thefilter’strackingerrorremainsclosetothetruevalueregardlessofthesurface.With thisresult,wemovedforwardwithimplementingtheEKFontheTeensy.Operatingatafrequency of240Hz,theboardtakesmeasurementsandrunsthemthroughtheEKFtoestimatetheboard’s
Figure12:EKFperformanceonsmoothground
Figure13:EKFperformanceonroughground
currentstate.Withthefilterimplemented,wenowhavethetiltangleandboardspeed,whichcan beusedtodeterminethedesiredturningradiususingthesystem’sdynamics.
3.5.2OptimalLeanSteerPhysics
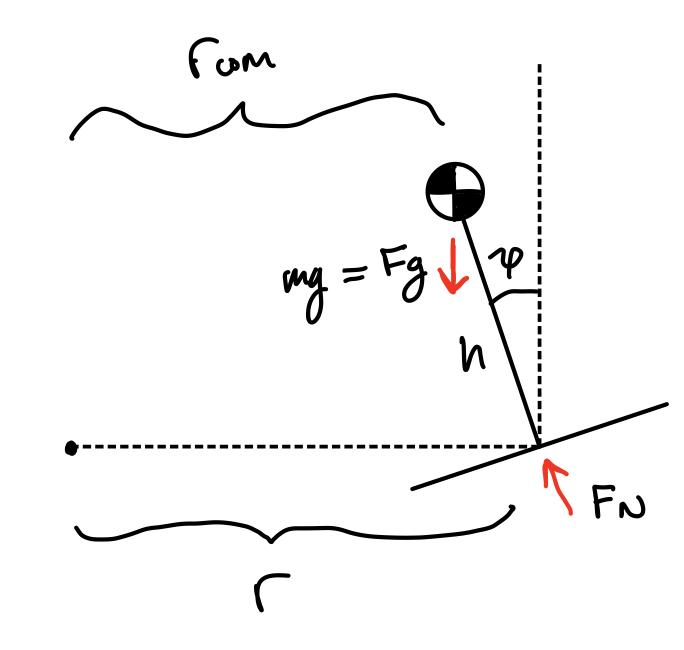
Aswewantourboardtofollowoptimalleansteerphysics,wemustdeterminethis”optimal” relationshipbetweenvelocity,tiltangle,andturningradius.Westartbymodelingthesystemas aninvertedpendulumandcreatingafree-bodydiagram,whichcanbeseeninFigure 14.Using
Figure14:Freebodydiagramoftherider-boardsysteminaturn this,wefindtheforcesactingonthesysteminthe x and y directions.
Solvingforthenormalforce FN inEquation 12,wethenplugthisintoEquation 11.
Combiningthiswiththeequationforcentripetalacceleration,weget
Theradiusofthecenterofmass rCOM isrelatedtotheturningradius r by
Finally,bycombiningEquations 14 and 15,wefindthatthefollowingrelationcandescribeoptimal leansteerphysics
Usingthetiltangleandspeedfoundabove,wecanusetheoptimalleansteertocalculatethe desiredturningradiusforthecurrentstate.Thisturningradiuscanthenbeconvertedintothe desiredtruckangletoachievethatturningradius,whichcanbeseeninEquation 17
3.5.3FeedbackMotorController
Ateverytimestep,thefilteredtruckangles y(t)arecomparedwiththereferenceinputs r(t)to calculatetheerrorsignal e(t).Thiserrorsignalisthenfedintothecontroller,whichconvertsitto adirectionandnumberofstepsforthesteppermotor.Thesestepsaresentascontrolsignals u(t) tothemotors.Thecontrolloopupdatesat60Hz,refreshingthesignalssenttothemotorswith eachtimestep.
Thecontrollerisastraightforwardproportionalcontroller,multiplyingthetrackingerrorby aproportionalgain(Kp)todeterminethenumberofstepssenttothemotor.Althoughmore advancedcontrolarchitecturescouldhavebeenemployed(PD,PID,etc.),wechoseaproportional controllerforitssimplicity.Theaddedcomplexitiesofimplementingamoreadvancedcontroller wouldyieldminimalbenefits.Forinstance,theactuationmechanismexhibitsminimalfriction, resultinginnegligiblesteady-stateerrorinthesystem,andthusanintegratortermwouldoffer littleperformanceimprovement.Furthermore,duetothesmallrangeofactuationandthehigh speedofoursteppermotor,wecouldoperateourcontrollerwitharelativelylowproportionalgain. Thiseliminatedovershootofourreferenceinput,reducingtheadvantageofaddingaderivative termtoourcontroller.
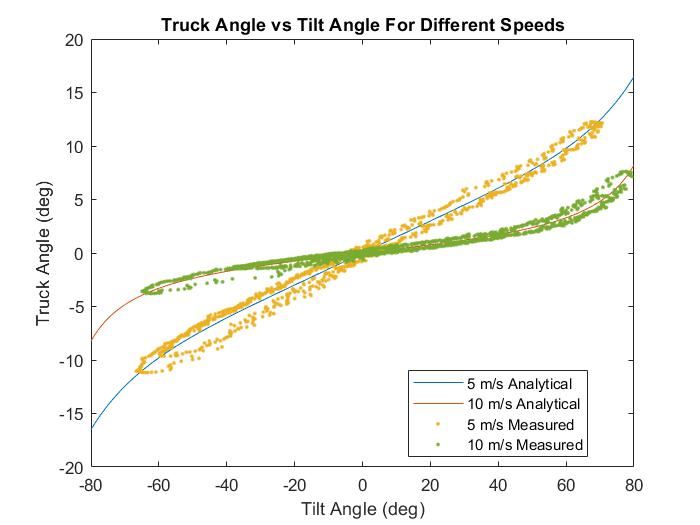
Duringtesting,wefoundourcontrollerperformedwellintwoaspects.Firstly,foragiven referenceinput,oursystemcouldtrackitwitharelativelylowtrackingerror(Figure 16).The slighttrackingerrorcanbeattributedtosystemdelaysandtheramp-likenatureofthereference input,whichintroducesasteady-statetrackingerrorevenformoreadvancedcontrollerslikePI, PID,etc.Thisexplainswhythestandarddeviationofthe5m/srunishigherthanthe10m/s run.Thesteeper”ramps”resultinincreasedsteady-stateerror.
Figure15:Closedloopmotorcontroller
Figure16:Controllerperformanceatvariousspeeds
Additionally,thesystemfollowedouranalyticallyderivedmodel,asshowninFigure 17.The hysteresisseencanagainbeattributedtothedelayinthesystemaswellastheramp-likeinputs giventothesystem.
3.6BenchTopTesting
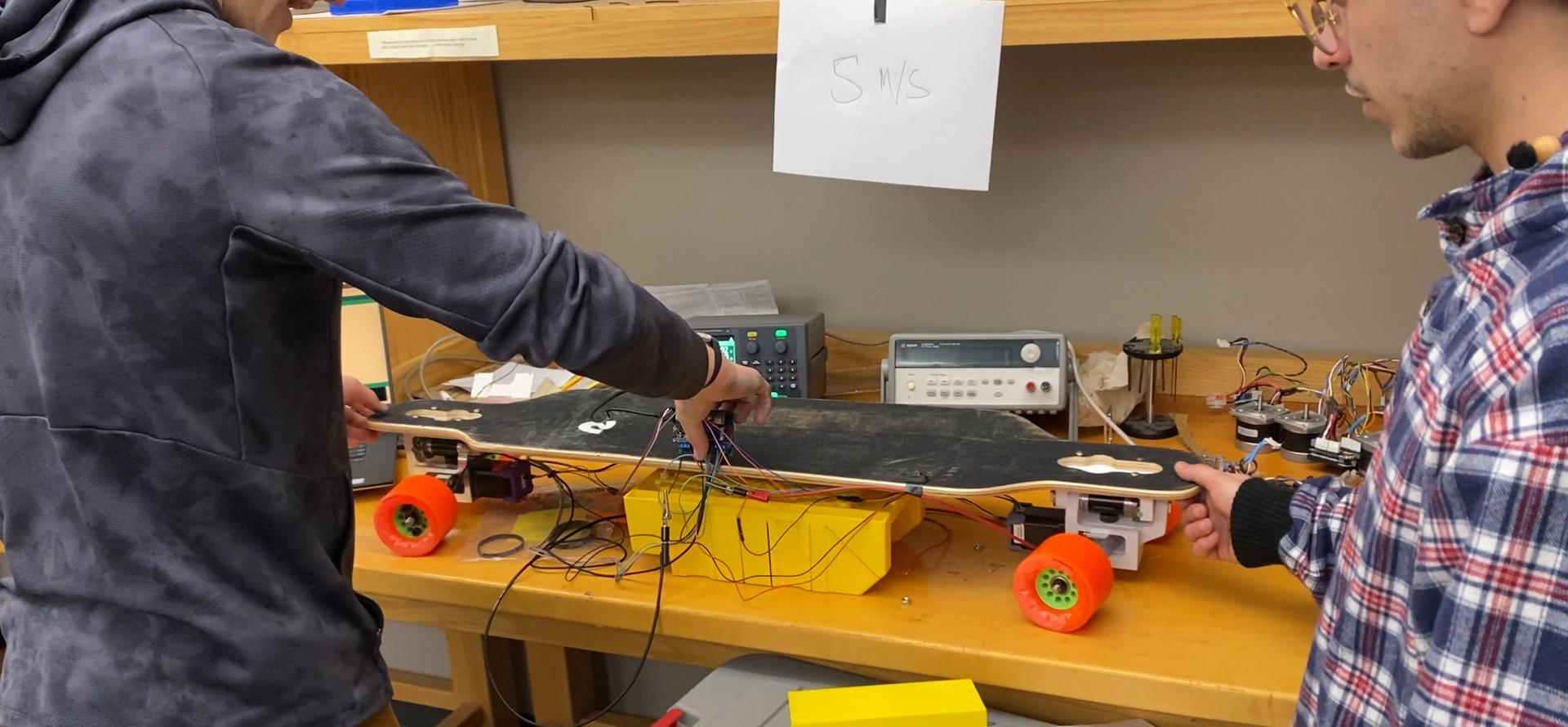
Ourprojectwrappedupwiththeinitialtestingofoursystem.Althoughwehadenvisioned performingtestingusingourtestingrig,wefirststartedbyperformingtestingonatabletop.Our setupforthistestingcanbeseeninFigure 18.Wesimulatedtheboardmovingatvariousspeeds andtestedtheactuationmechanismstoseeiftheyactedasexpected.Wefoundthatthesystem wasabletomeasuretiltangleaccurately,andwasabletodrivethemotorstothecorrectposition. ThiscanbeseeninFigure 17.Wethenproceededtoattempttoputweightontheboardand foundthatthemotorswerenotabletoproducethetorquenecessaryinordertoactuatethetrucks. Becauseofthis,itdidnotmakesensetoperformtestingusingourtestingrig.
Figure17:Truckangleandtiltanglefollowanalyticallyderivedrelationship
Figure18:Performingsystemtestingatasimulated5m/s.Ascanbeseen,thetruckscanturn themselveswhenthesensoristilting(simulatingaturn)
4EconomicAnalysis
Carefulconsiderationoftheeconomicsoftheprojectisnecessarytoensureadequateplanningfor successfulproductintroductiontothemarket.FromourdiscussionswithLSDLLC,weunderstand thattheproductwillbemarketedasatruck-mountablesolutionthatcanbeattachedtoexisting boards.TheremayalsobetheoptiontocreatecompleteLSDboardswiththemountablesolution alreadyinstalled.Thepurposeofthissectionistodiscusstheeconomicsinvolvedwiththeproject andhowitalignswiththesponsor’slong-termgoals.
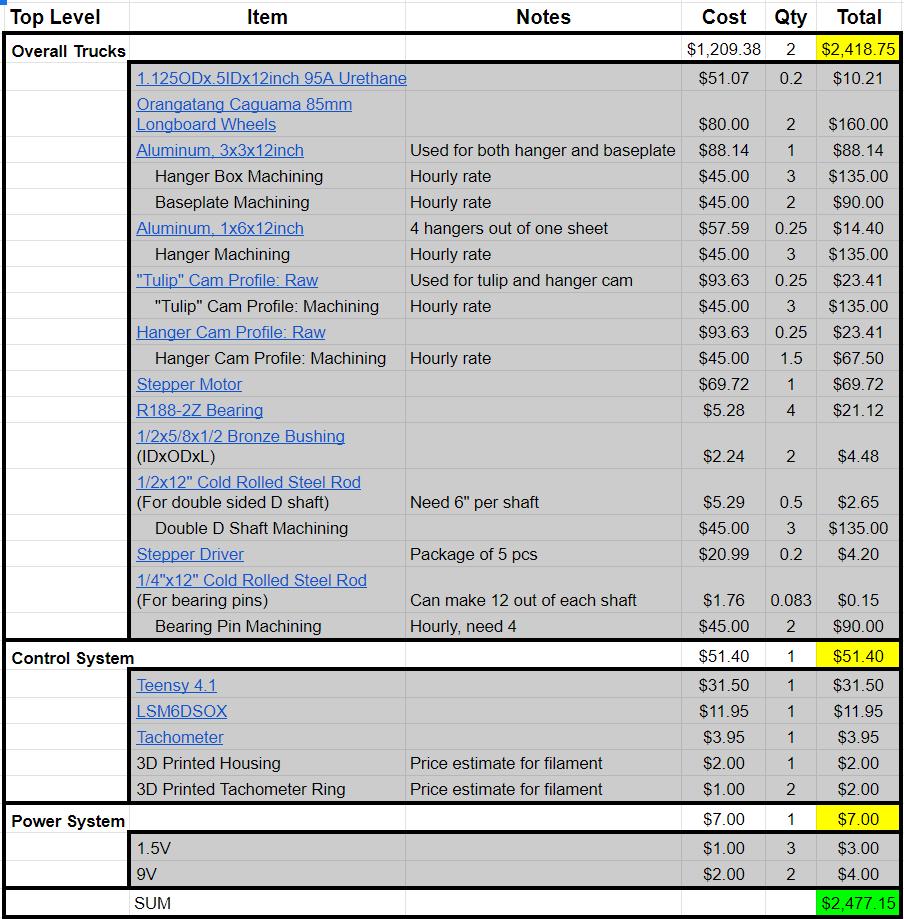
Tobeginwith,letusconsiderthefollowing,whichisthetotalcostofmanufacturingtheentire
truckinENGS89and90.
Figure19:ENGS89/90BOMlistincludingthecostsofthevariousmaterialsthatwentinto manufacturing
Admittedly,thetotalcostarrivedatisquitehigh.However,itisimportanttonotethatthe costfigureslistedabovearefortherawproductsthatwerecustommilledinthemachineshop.The hourswerecalculatedbasedonthetimeittookusatourexperienceleveltomaketheparts.With manufacturingprocesseslikeinjectionmolding(formorebasicparts)andmetallic3-Dprinting(for morecomplicatedpartslikethetulip),weprojectthatthelaborcosts,whichcurrentlyconstitute amajorpartofourincurredcosts,willbereducedsignificantly.We,thus,expectthemarket-ready per-truckcosttotalpricetobelowerthanthatstatedaboveifLSDstreamlinesthemanufacturing processandsupplychaintocutcosts.
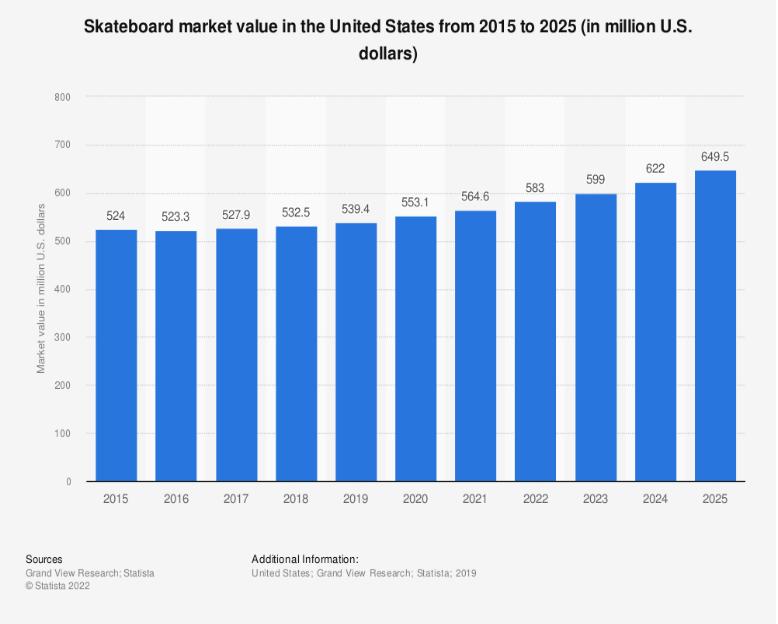
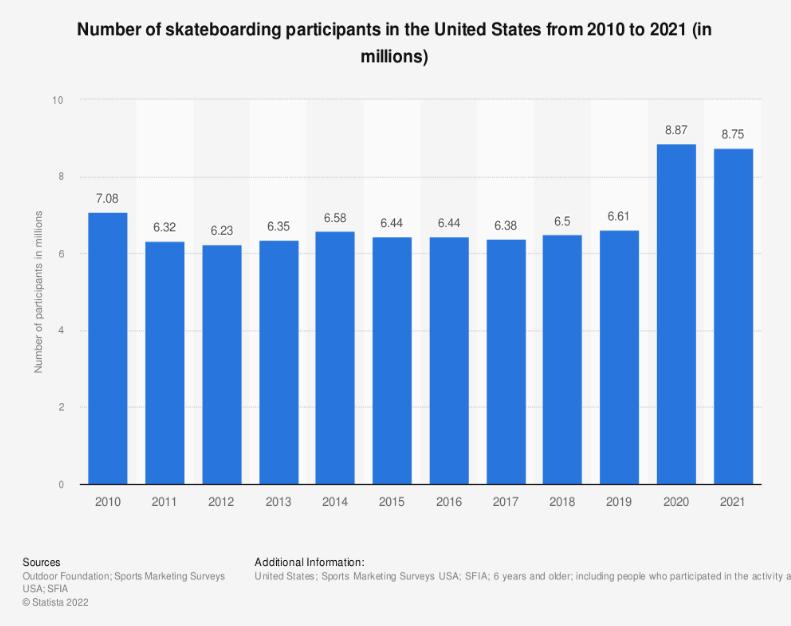
Asobservedinthetwographsabove,therehasbeenanuptrendinthevalueoftheskateboard marketintheUS.Likewise,thenumberofskateboardusersinthepastdecadehasremained relativelystable,witharecentuptickinridersinthepasttwoyears.Thisshowsthatthereisan availableandgrowingmarketthatLSDcantapinto.
Consequently,asoundproformaunderstandingofthefinancialrequirementsforlarge-scale, long-termimplementationofthedesiredproductisnecessaryforsuccessfulmarketpenetration. Ouranalysisinvolvedvariousassumptionsthattookseveralfactorslikethecostsofdevelopment,
(a)Uptrendoftheskateboardmarketvalue (b)Uptrendoftheskateboardusers
Figure20:Trendsinskateboardmarket
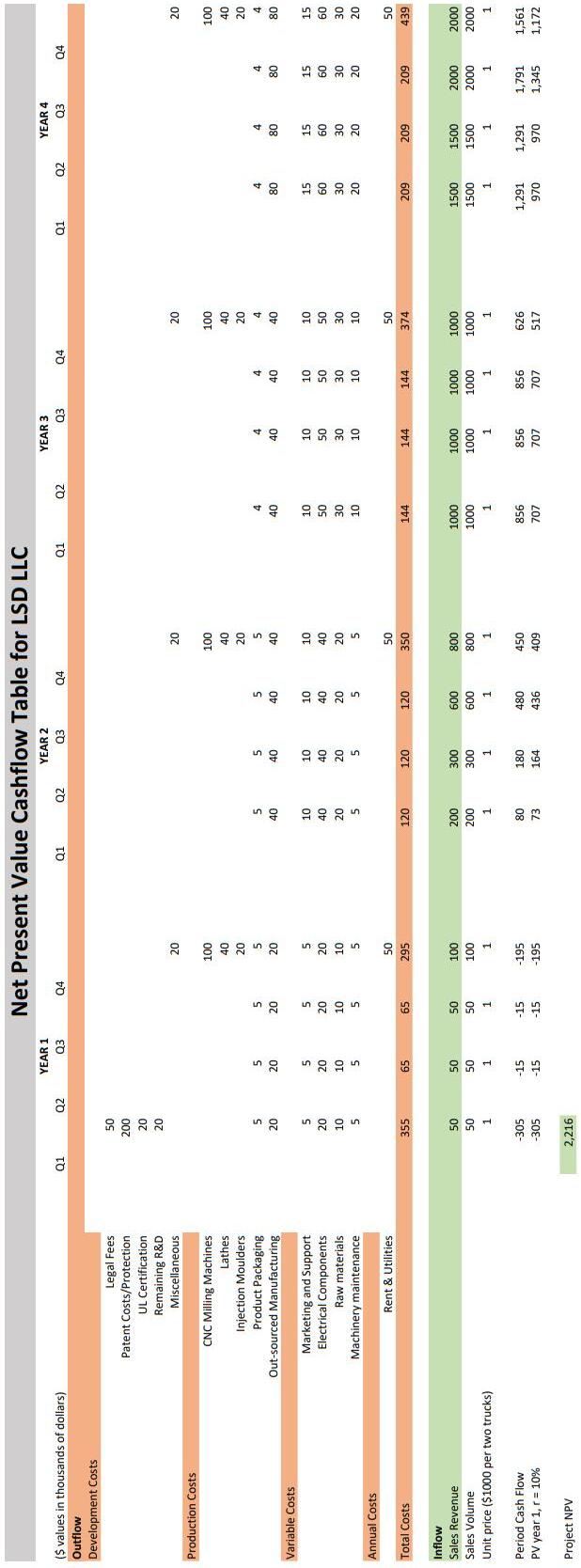
production,andexpansionintoaccount.Wecalculatedanetpresentvalue(NPV)ofapproximately $2millionoverafour-yearperiod,indicatingapotentiallyviablebusinessmodelforourproduct. TheNPVisafinancialmetricusedtodeterminethecurrentvalueofexpectedfuturecashflows, adjustedforthetimevalueofmoney.Thismeansthatweareabletoevaluatetheprofitabilityof ourproductbyaccountingforthefactthatmoneyreceivedinthefutureisworthlessthanmoney receivedtodayduetoinflationandtheopportunitycostofnothavingaccesstothatmoneynow.
WehaveconductedathoroughanalysisofthevaluesandfactorsthatcontributedtotheNPV calculation,whicharepresentedinAppendix G.Whileourinitialprojectoutputismodest,producingonly250samplesperyear,wehavetargetedanichehigher-endmarketsegment.Wehavekept ourprojectionsconservative,butiftheactualfinancialresultsmeetorexceedourexpectations, ourfutureyearprojectionswillbecash-flowpositiveandcontributetotheNPV.Weanticipatean initialinvestmentofabout $800thousandinstartupcapitaltofundproductdevelopment,launch, andrawmaterialprocurementtosupportproductionincaseofrevenueorderdelays.Thecostper-two-trucksisprojectedtobe $1000.Thisisareasonableestimatebasedonourprojected calculationsforastreamlinedmanufacturingprocess.Ourbreak-evenpointisprojectedtooccur withinthefirsttwotothreeyearsofoperation,afterwhichweexpecttobefullycash-flowpositive. Byyearthree,weshouldbeabletosustaingrowthandscaleupourproductionconcurrently.
Ourfinancialanalysisindicatesapromisingbusinessoutlookforourproduct.Wehavetaken acautiousapproachtoourprojections.Still,withaninitialinvestmentof $800thousandanda focusonourtargetedmarketsegment,weanticipateasuccessfullaunchandaprofitablefuture.
5RecommendationsforFutureWork
5.1TestRig
Ourbiggestsuggestionsforimprovingthefunctionalityofthetestrigareasfollows.Currently themechanismformountingthesurgicaltubingworks,butanexplorationofothertechniquesis recommended.Eitherredesigningtheattachmentpointandinteraction,orfullymovingawayfrom surgicaltubingmaybeviableoptions.Additionally,thecurrentplacementofthepullyisalittle lowerthanideal.Thisresultsinthebailroperubbingonthemaintruckforkincreasingfriction andmakingithardertoliftJerry.Changingtheheightofthepulleyorthelocationshouldbe exploredoptions.
5.2Mechanical
Generaladviceforimprovedqualityoflifeofthecurrentaluminumtruckdesignincludesreducingfrictiongenerally.Strategiesincludeaddinglithiumgreaseinareasofaluminum-aluminum rubbingandthrustbearingsoroilybronzewashersinplacesthatexplicitlyneedextendedlubrication.
5.2.1ReturntoCenterMechanism
WefeelthatdevelopingthisRTCfurtherwouldbetimewellspent.Therelativesimplicityand effectivenessofthedesignallowmuchmoreroomforexpansionoftheothermechanismstospaces closertotheboard–increasingthetiltrange.ThemainproblemswiththeRTCcanbeseparated intotwomainparts.First,thepreloading,ortighteningofthetruck,allowsforastifferRTC.This wouldbeequivalenttotighteningthebushingsonastandardtruck.Second,guidingtheTulipon theshaftandpreventingrotation.
Preloading: Preloadingisanessentialpartofcustomizingaskateboardtouserpreference.At themoment,theonlymethodofcustomizationisshimmingtheRTCbeforemountingitandthis wasusuallythemostdreadedpartofassemblingthetruck.However,stiffertrucksusuallyresulted inabetterfeel.WehavecuratedtwopotentialoptionsforcreatingandtighteningthenewRTC:
Thefirst:creatingacustomshaftcollarthatexpands.Theshaftcollarwouldworksimilarlyto a LabLift.Thecollarwouldsitontheshaftbehindtheurethaneandwouldexpandandcontract subjecttothesingleboltrunningoutofitsside.
Thesecond:Apseudo-kingpin.Thiswouldbeasleevethatfitsovertheshaftholdingthe Tulip.ThissleevewouldbebehindtheurethanewithanIDsimilartotheshaftandanODjust under3/4”.ThispinwouldhaveathreadedODthatthreadsintothebaseplateandtiltswiththe boardwhilefreelyspinningrelativetothehangerbox.Theheadofthepinwouldhaveflatsthat fitintotheslottokeepitlockedinplace.Thisisanadaptationofthe OriginalTrucks’ design thatimplementsasimilartechniquetotightenthespring.Pleasenotethatremovingtheelectrical systemwiththesuggestedimplementationwouldneedtobereworkedsuchthatthehangerrotates appropriatelytotheboard’stilt.ForpurelymechanicaltrucksthatusetherevisedRTC,reverse engineeringtheOriginalTrucksmechanismtoworkwiththecamsfromLSD’sTruckV3isneeded.
Double-DShaftAlternatives: ThedoubleDshaftholdsalotoftorqueandiscurrently madefromstainlesssteeltocombatthis.However,alternativesshouldbelookedintoasthey mayhelpreducethedeformationthatresultsfrommaxleaningandfulltorqueonthealuminum. Heavy-dutysplinedshaftsmayprovideagoodalternative.Theyareanextensionofthedesign providedbyHelixDesignwithaddedslotsandwillusuallycomewithtight-tolerancefollowers thathavemountingholesthattheTulipcanbesecuredto.Modifyingtheendsoftheshaftsto largerorsmallerdiameters,boththreadedandnotthreaded,wouldprovideversatilitytodifferent applicationsinfuturedesigns.AnotheralternativeispreventingtheTulip’srotationbysecuring ittothehangerbox.Optionsincludedirectlypinningthetulipintoaslotinthehangerbox orextendingthebottomandaddingalargeflatthatinteractswiththetopofthehangerbox andcanfreelyslideforwardandbackwardwhilepreventingrotation.Thesealternativesecuring methodseliminatetheneedforadoubleDshaftandmitigatetheconcernofdevelopingbacklash fromdeformation.However,thesuggestedpointswheretheTulipinteractswiththehangerbox arecurrentlyexposedandexcessdebriscouldresultingallingorthemechanismfailing.
5.2.2HangerActuation
Hangeractuationisoneofthemostdifficultproblemstosolveindevelopinganysortofdynamicallycontrolledtruck.Anyimplementationmustremainextremelyrobustwhilealsoresponsive. Althoughwewereabletoimplementhangerrotationwithacamprofilethatcontactstworoller bearings,itinducedseveralproblems,aslistedbelow.
1. Thecamprofilesaredifficulttodesign,machine,andmaintain.
2. Therewasasignificantamountofbacklashpresent.Itisdifficulttoperfectlyengagethecam profileupagainsttherollerbearingswithouthavinganybacklashpresent.
3. Torquetransferisnotidealduetoahighdegreeoffrictionbeingpresent.Significantgrinding waspresentonboththetulipandhangercam.
4. Thecamtakesuparelativelylargeamountofspace,whichprovedparticularlydifficultto workwithgiventhehangerbox’ssizingneedstohavesufficientgroundclearance.
Forthesereasons,werecommendpivotingawayfromacam-basedactuationsystemtoanother system.Thiscouldbelikeabevelgearsystemwithamotormountedinasimilarlocationbutwith ahigh-reductiongearbox.Overall,moretimecouldbespenttestingarobustactuationmechanism thatisalsofastandaccurate.
Italsomayprovebeneficialtomoveawayfromsteppermotorsandimplementadesignusing amorepowerfulmotor.Steppermotorsaregreatforhighpositionalaccuracy,buthightorqueis neededtomaintainhangerangle.AservomotororanormalDCmotorwithanencodermayprove moreeffectiveatchangingthehangerangleunderload.
Additionally,itmaybenecessarytointroduceagearboxtothedesigntoachievethelevelof torqueneededtoturnthehangers.Apotentiallow-profileoptionforthisisaplanetarygearbox duetoitshighreductionswithminimalreductionstages.
5.3Electrical
Withboththetestrigandsystemelectricaldesign,allthesensorsareselectedtobedurablein roughenvironments,buttheyarestillpronetofailure.Onewayelectricalfailurescanbeavoidedis toaddredundantsensors.Thiswouldallowforfaultdetectionandpreventsinglepointsoffailure.
Additionally,ourelectricalboardsaresolderedonaperforatedbreadboard.Whilethisisfine forprototyping,itcancomeundonemoreeasilythanaPCBdesignandtakesmuchlongerto manufacture.Therefore,itmaybemoreadvantageoustohaveaPCBforabetter,moresecure circuitboard.
5.3.1OneBatterywithVoltageConversion
Currently,ourpowersourcesareseparatedintoa4.5Vbattery(3SAAbatteries)andan18V battery(2S9Vbatteries).However,wecanredesignusingonlyonevoltagesourcewithappropriate voltageregulators.Forasolutionwithouttheintegratedskateboardbatteries,wecanusean18V batterywithbuckconvertersthatdropthevoltageto4.5VtosafelypowerTeensy4.1andother sensorswhileallowingthe18Vsourcetodrivethemotors.Forasolutiononanelectricskateboard, aladderconfigurationofvoltagedroppers(to18Vandto4.5V)mayberequiredastheelectric skateboardbatteriesareusuallymuchhighervoltagethan18V.
Additionally,whenselectingbuckconverters,itwouldbewisetohavethembeautomotivegradesotheycanbeshieldedfromnearbyhigh-frequencyswitchingcausedbytheTeensy4.1or anyMCU.
5.4Controls
RecommendedimprovementstothecontrolsystemincludemodifyingtheExtendedKalman Filtertoincludecentripetalaccelerationanddevelopingamoreadvancedmotorcontrollerfor improvedperformance.
5.4.1ExtendedKalmanFilterImprovements
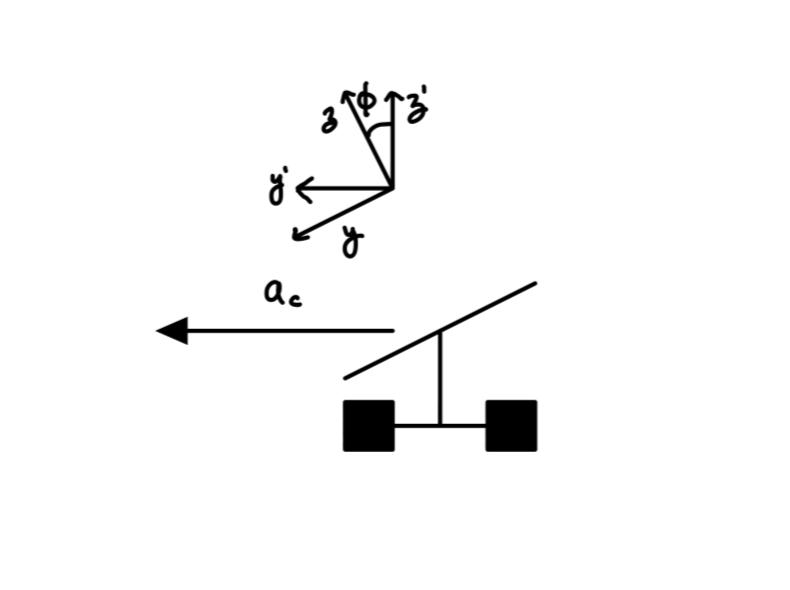
AsdiscussedinSection 3.5.1,oursensorusesthemeasuredgravitationalaccelerationvectoras oneofthemeasurementstodeterminetheleanangleofoursystem.Inastaticenvironmentor whenmovingatlowspeeds,thisisareasonableapproximation.However,asspeedincreases,other accelerationsareexperiencedbytheboard,mostnotablycentripetalacceleration.Toaccountfor this,onewouldhavetomodifytheaccelerationequationtoincludetheseeffects.Thecentripetal accelerationvectorwouldhaveamagnitudeof v2 /r andwouldbepointingtothecenteroftheturn (Figure 21).Thespeedoftheboardismeasured,andtheturningradiuscanbederivedthrough invertingEquation 17 andusingtheanglesofthetrucks.
Figure21:Centripetalaccelerationexperiencedbythesystem.Accelerationisnotinthebody frameorinertialframe,soanewframeisneeded.Thetransformationfromprimetobodyframe isarollaboutthex-axisbythetiltangle ϕ.
Becausethisvectorisneitherintheinertialnorbodyframe,onewouldneedtoperformthe propertransformation(rotationof ϕ aboutthex-axis)todescribetheaccelerationinbodyframe coordinates.ThisupdatedformoftheaccelerationmeasurementequationscanbeseeninEquation 18,where ag isthegravitationalaccelerationdescribedinEquation 10.
WhilethisdoesincreasethecomplexityofimplementingtheEKF,itcouldleadtoincreasesin filterperformance,especiallyinhigh-speeddynamicenvironments.
5.4.2MotorControllerImprovements
Currently,thesystemusesasimpleproportionalcontrollertoconvertthetruckangleerror signaltomotorcontrolsignals.Weintentionallyimplementedasimplecontrollerasitwould requirelesstimetogetworking,andwefeltthattheperformancetradeoffswereworthitfor thisinitialprototype.Additionally,becauseweusedsteppermotors,thesignalswesenttothe motorwerethenumberofstepstotake.Wecouldnotaffectthespeedofthesteps,meaningthat addingmoreadvancedmotorcontrollerswouldnothavemadesenseforourchoiceofmotor.As wehighlightedinSection 5.2.2,steppermotorsarenotthebestchoiceforthisproject.Instead, somethinglikeaservomotororDCmotorshouldbeusedastheyoffersignificantlymoretorque. Thesemotors,however,requiremoreadvancedcontrolschemes,meaningthatfutureteamswould havetoimplementaPDorPIDmotorcontrollertogetthedesiredperformanceoutofthemotors.
5.5PotentialFuture89/90Projects
WebelievethatthereareacoupleofavenuesforfutureENGS89/90projectsthatcontinue theworkwehavedone.Theyareacompleteredesignofthetrucksandthecreationofamore sophisticatedelectronicssystem.
5.5.1Trucks
Oneofthemainfocusesofourprojectwasthecreationofskateboardtrucksthatachieve3 mainobjectives:decouplingleaningandsteering,allowingforlargertiltranges,andelectronic actuationoftheskateboardtruck.However,becauseourprojecthadsomanydifferenttasks,we couldnotdedicateenoughtimetocreateafullyfleshed-out,sleekdesign.AnENGS89/90group couldbetaskedwithoverhaulingthemechanicaldesignofthetrucks.Thiswouldentaildesignfor manufacture,aswellasthedevelopmentofanovelactuationmethodthatcanprovidethehigh torquesnecessarywhileremainingresponsiveandrobustdamagescausedbysandandwateronthe road.Thisprojectwouldbemostlymechanicalinnature,however,acursoryknowledgeofcontrol theorywouldbebeneficialasmotorcontrollersmaybeneededdependingonthegroup’smotor selection.
5.5.2Electronics
Theothermainfocusofourprojectinvolvedthecreationofanelectricalsystemthathandled sensingdatafromthesystemandprocessingthatdata.Asthiswasthemainfocusoftheproject, aspectssuchaspoweringthesystemandPCBdesignwereneglected.Agroupcouldbetasked withupdatingtheelectricalsystemtousealargebatterywithvoltageconversionformotorsand sensors,useredundantsensorswithfaultdetectionalgorithmstoincreasetherobustnessofthe system,andcreatePCBdesignstobetterhousealloftheelectricalcomponentsofthesystem. AteamforthisprojectwouldconsistofmostlyElectricalEngineersandComputerScientists/ ComputerEngineers.
AReferences References
[1] J.Fox, Dampingsystemforskateboards,en,Jun.2014.[Online].Available: https://patents. google.com/patent/US8752849B1/en?q=speed+wobble+skateboards&oq=speed+wobble+ skateboards
[2] M.Burrows,C.Burd,andB.McKenzie,“CommutingbyPublicTransportationintheUnited States:2019,”en,p.11,[Online].Available: https://www.census.gov/content/dam/ Census/library/publications/2021/acs/acs-48.pdf
[3] D.Rajewski, Turnvs.lean:Dialingintheperfectlongboardset-up,en,2017.[Online].Available: https://stokedrideshop.com/blogs/stoked-school/turn-vs-lean-dialing-in-theperfect-longboard-set-up