Carlos Coutinho Marketing and Product Manager Phoenix Contact, S.A. IZa#/ (*& '&. &&' ,+% ;Vm/ (*& '&. &&' ,+. lll#e]dZc^mXdciVXi#ei
DOSSIER
TRANSMISSÃO DE ORDEM E RECOLHA DE DADOS COM TECNOLOGIA BLUETOOTH 1. OBJECTIVO Em automação industrial tem-se vindo a massificar a utilização de comunicações sem fios, desde casos com alcances de poucos metros até casos com recurso a redes móveis de telecomunicações. :hiZ Vgi^\d kV^ ^cX^Y^g hdWgZ XVhdh YZ Xjgid VaXVcXZ! Vegdm^bVYVbZciZ &%% metros, em que a tecnologia intrínseca à comunicação sem fios é baseada na especificação Bluetooth. CZhiZ XdciZmid! ^bedgiVciZ Xdc]ZXZg Vh cZXZhh^YVYZh fjZ edYZb hZg resolvidas com a tecnologia Bluetooth e cujo alcance ronde os 100 metros. Essas necessidades estão relacionadas com os obstáculos que impedem a construção fácil de uma infra-estrutura de passagem de cabos entre equipamentos que têm de comunicar permanentemente. D ZmZbead bV^h Zk^YZciZ d YZ ZhiVWZaZXZg V Xdbjc^XV d ZcigZ jb equipamento que está instalado numa parte móvel da máquina e outro fjZ Zhi{ cjbV eVgiZ ÒmV! Xdbd edg ZmZbead jbV [ZggVbZciV fjZ [jcX^dcV cV ZmigZb^YVYZ Yd WgV d YZ jb robot. Se a ferramenta tiver válvulas ou cilindros, então será necessário instalar pelo menos um cabo de comando YVh k{akjaVh dj Ydh X^a^cYgdh ZcigZ V [ZggVbZciV cV ZmigZb^YVYZ Yd robot, parte móvel) e o quadro de comando dessa ferramenta (instalado na egdm^b^YVYZ Yd robot! eVgiZ ÒmV #
necessidade de saber se as ordens foram efectivamente realizadas. Neste caso, o sentido da comunicação inverte-se. São os estados da parte móvel YV b{fj^cV fjZ h d igVchb^i^Ydh | eVgiZ ÒmV! Xdc[dgbZ Zhi{ ZhfjZbVi^oVYd cV ;^\jgV '# EVgV Va b YV ^YZ^V fjZ Zhi{ cV ;^\jgV '! d hZci^Yd YV Xdbjc^XV d YV eVgiZ b kZa eVgV V eVgiZ ÒmV edYZ hZg VegdkZ^iVYd iVbW b eVgV gZXda]Zg YVYdh! Xdbd edg ZmZbead d ZhiVYd YV egZhZc V YZ jbV eZ V cV edh^ d XdggZXiV YVYd edg jb hZchdg YZ egdm^b^YVYZ # CZhiZ XVhd! c d hZ igViV YZ obter a confirmação de ordens mas de recolher estados de funcionamento, cZXZhh{g^dh | ZmZXj d YZ gdi^cVh VjidbVi^oVYVh#
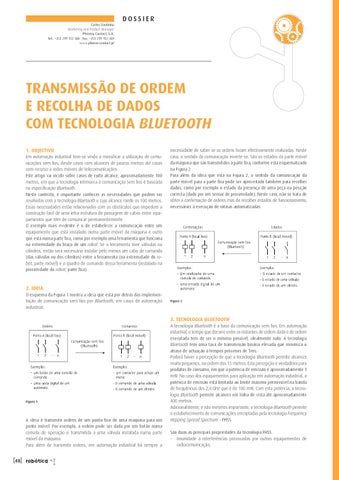
2. IDEIA D ZhfjZbV YV ;^\jgV & bdhigV V ^YZ^V fjZ Zhi{ edg YZig{h YVh ^beaZbZctação de comunicação sem fios por Bluetooth, em casos de automação industrial.
Figura 2
3. TECNOLOGIA BLUETOOTH
Figura 1
6 ^YZ^V igVchb^i^g dgYZch YZ jb edcid Òmd YZ jbV b{fj^cV eVgV jb edcid b kZa# Edg ZmZbead! V dgYZb edYZ hZg YVYV edg jb Wdi d cjbV consola de operação e transmitida a uma válvula instalada numa parte móvel da máquina. Para além de transmitir ordens, em automação industrial há sempre a
[48]
robótica
A tecnologia Bluetooth é a base da comunicação sem fios. Em automação industrial, o tempo que decorre entre os instantes de ordem dada e de ordem ZmZXjiVYV iZb YZ hZg d b c^bd edhh kZa! ^YZVabZciZ cjad# 6 iZXcdad\^V Bluetooth iZb jbV iVmV YZ igVchb^hh d W^c{g^V ZaZkVYV fjZ b^c^b^oV d VigVhd YZ VXijV d V iZbedh eg m^bdh YZ &bh# Poderá haver a percepção de que a tecnologia Bluetooth permite alcances muito pequenos, na ordem dos 15 metros. Esta percepção é verdadeira para egdYjidh YZ Xdchjbd! Zb fjZ V edi cX^V YZ Zb^hh d Vegdm^bVYVbZciZ & mW. No caso dos equipamentos para aplicação em automação industrial, a edi cX^V YZ Zb^hh d Zhi{ a^b^iVYV Vd a^b^iZ b{m^bd eZgb^hh kZa cV WVcYV de frequências dos 2,4 GHz que é de 100 mW. Com esta potência, a tecnologia Bluetooth eZgb^iZ VaXVcXZh Zb a^c]V YZ k^hiV Vi Vegdm^bVYVbZciZ 400 metros. Adicionalmente, e não mesmos importante, a tecnologia Bluetooth permite o estabelecimento de comunicações encriptadas pela tecnologia Frequency Hopping Spread Spectrum " ;=HH# H d YjVh Vh eg^cX^eV^h egdeg^ZYVYZh YV iZXcdad\^V ;=HH/ › Imunidade a interferências provocadas por outros equipamentos de radiocomunicação;