ARTIGO TÉCNICO Adam El Sayed Auf, Nico Dudek and Erik Maehle *
HEXAPOD WALKING AS EMERGENT REACTION TO EXTERNALLY ACTING FORCES ABSTRACT Insect-like walking with a six-legged robot involving 18 degrees of freedom is a fascinating as well as challenging task in terms of controlling and coordinating the 18 joints. Especially the control of those legs touching the ground, thus being mechanically coupled, is complex. External forces acting to the walker’s joints contain the information for each joint where and how far to move. This paper presents a decentralized controller approach measuring externally acting forces in each joint and combining active compliance with a step performing reflex. Local communication between the six legs as well as individual complying of the selected joints is used to achieve walking as an emergent reaction to the externally acting forces. This approach is based on an organic computing architecture and is implemented and tested on a six-legged walking machine.
I. INTRODUCTION Observing insects moving with a surprising facility through extremely unstructured environments like branchwood, leaves, and under branches can make a robotic engineer still jealous. Although great six-legged walking machines were built [1][2], insects still outclass their robotic half siblings with their locomotion abilities. Insects are able to handle obstacles like large gaps or disturbances like losing foothold contact on slippery ground. They even compensate strong changes in their own body geometry like the loss of a leg. In robotic science these capabilities in unstructured environments are still a challenge. This fact leads to an increasing curiosity for biological principles. For solving these challenges an internal accurate calculation by the insect’s neurons seems hardly probable. Biological studies expose a decentralized reflex-based control system in strong combination with the organism’s anatomical characteristics such as elasticity and stiffness of muscles and joints. The later component is at least as important as the controller and has been disregarded for a long time. The deeper scientists probe into the biological coherences of animal locomotion the more important the anatomical features and qualities become. The muscles’ elasticity seems to play an important part in terms of walking stability as well as compensating external forces acting on the walker’s body. In particular the walking machine’s legs touching the ground at the same time produce forces acting on the robot’s body, which seem to be compensated in a biological organism. This compensation corresponds to the accurate calculation of a closed kinematic loop built up from the ground touching legs. Introducing a positive feedback concept [3] [4] in the walker’s joints as successfully presented in two versions of the Walknet simulation [5][6] may contribute to the improvement of walking robots. Positive feedback or active compliance has been implemented to improve walking in the DLR-Crawler [7]. This work contributes to the topic of legged locomotion by combining active compliance with a reflex based system to produce the complex behaviour of six-legged walking. Here, six-legged walking is a reaction to the trigger of active forces. The global reaction arises from local joint reflexes. While a positive feedback concept was successfully introduced in a hexapod simulation in
[5][6], in this work a similar concept using a reduced set of parameters is implemented and tested on a real robot. In the following section the robotic platform OSCAR (Organic Self Configuring and Adapting Robot) is introduced. Subsequent, the decentralized Organic Robot Control Architecture (ORCA) [8] [9] particularly its walk controller modules are described. In section IV the active compliance approach embedded in the ORCA concept is elucidated in detail. In section V the reflex based walking reaction to external forces is explained. Finally, section VI shows the experimental results of the introduced active compliance approach.
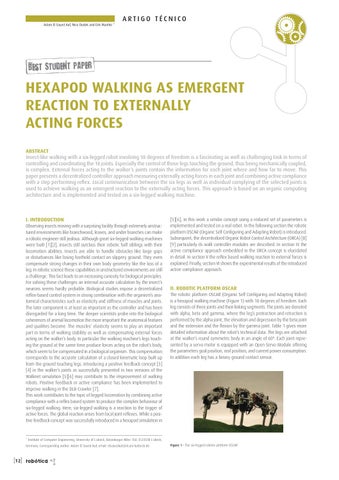
II. ROBOTIC PLATFORM OSCAR The robotic platform OSCAR (Organic Self Configuring and Adapting Robot) is a hexapod walking machine (Figure 1) with 18 degrees of freedom. Each leg consists of three joints and their linking segments. The joints are denoted with alpha, beta and gamma, where the leg’s protraction and retraction is performed by the alpha joint, the elevation and depression by the beta joint and the extension and the flexion by the gamma joint. Table 1 gives more detailed information about the robot’s technical data. The legs are attached at the walker’s round symmetric body in an angle of 60º. Each joint represented by a servo motor is equipped with an Open Servo Module offering the parameters goal position, real position, and current power consumption. In addition each leg has a binary ground contact sensor.
* Institute of Computer Engineering, University of L¨ubeck, Ratzeburger Allee 160, D-23538 L¨ubeck, Germany. Corresponding author: Adam El Sayed Auf, email: elsayedauf@iti.uni-luebeck.de
[12]
UREËWLFD
Figure 1 • The six-legged robotic platform OSCAR