ARTIGO TÉCNICO Nuno Sousa, Eugénio Oliveira LIACC - Laboratório de Inteligência Artificial e Ciência de Computadores Faculdade de Engenharia da Universidade do Porto
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS ABSTRACT This paper describes a platform that enables a real robot control through a software Agent capable of learning, planning and navigating in a dynamic real-time environment. The Agent can be adapted to any mobile robot and creates a two-dimensional representation of the world that is used for navigation and path planning. Current implementation supports two environments: a simulated robot environment and a real world environment with a four legged walking robot. Our main contributions include: adapting BDI agents to real-time requirements and an algorithm to build a two-dimensional representation of that environment. Keywords: Agents, Algorithms, Control, Learning, Navigation, Path planning, Real-time, Robots, Sensor fusion
1. INTRODUCTION
2.1. Service Oriented Architecture
Although concepts akin to today’s robots go back to 450B.C. (Wikipedia, 2006), robots nowadays still haven’t delivered the promise of that companion that would help us in our daily lives. Today’s robots are heavily used in the industry but they still fall behind the initial vision of creating an artificial human. In fact, despite all the advances in Behavioural, Navigation and Path Planning techniques, commercial robots sold today do not provide basic capabilities like navigation and path planning without relying on devices that are installed in their operating environment. This limitation prevents robots from being used effectively in Dynamic Real-Time Environments like our own houses.
The platform proposed uses a Service Oriented Architecture. This type of architecture has been highly valued in the recent past and has a simple key concept: functionality should be split into several Services that work as a team. This means that there will be services that provide services to others, services that built on other services and even services that collaborate. The main purpose of this division is to ensure service isolation and clearly defined interfaces between the services. Having this isolation makes it possible to distribute the service by several systems. Having a clearly defined interface makes it possible to swap the implementation of a service without having any impact on services that are using it.
In recent years we saw the beginnings of an industry that develops what are called Entertainment Robots. Although these robots are targeting the average person, they have been taken by Universities worldwide as a hardware platform on which new techniques can be investigated and tested.
A Service Oriented Architecture makes it possible to swap out services in order to improve the platform or simply to support a new type of robot. It also makes it possible and easy to test each service individually. This is highly important since one of the goals of the platform is to be adaptable to any robot. To achieve this the platform provides a mechanism to develop and test the interface with a new robot without having any other service running that might, either interfere with the tests, or simply cause entropy when the goal is to develop an interface with the hardware.
These robots are real world implementations of solutions to many problems faced when creating a robot, but the problems solved are mainly physically related. Solutions for high level problems like path planning are not provided in these commercial solutions. In fact most investigation projects that use these robots rely on artificial landmarks for navigation and path planning. A platform is proposed that can turn a robot into an Agent that not only has Navigation and Path Planning capabilities but that can also create a representation of the environment were it was inserted using only the sensors available on the robot. This platform builds upon existing Artificial Intelligence concepts and techniques for Navigation and Path Planning but uses an innovative technique in order to build a model of the environment.
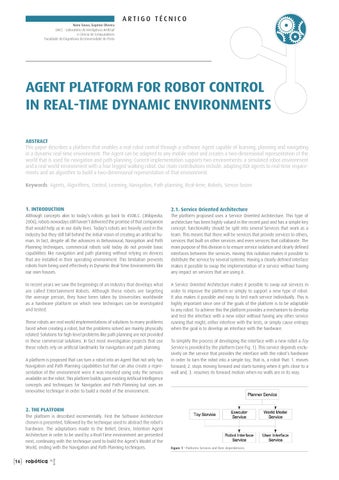
To simplify the process of developing the interface with a new robot a Toy Service is provided by the platform (see Fig. 1). This service depends exclusively on the service that provides the interface with the robot’s hardware in order to turn the robot into a simple toy, that is, a robot that: 1. moves forward; 2. stops moving forward and starts turning when it gets close to a wall and, 3. resumes its forward motion when no walls are in its way.
2. THE PLATFORM The platform is described incrementally. First the Software Architecture chosen is presented, followed by the technique used to abstract the robot’s hardware. The adaptations made to the Belief, Desire, Intention Agent Architecture in order to be used by a Real-Time environment are presented next, continuing with the technique used to build the Agent’s Model of the World, ending with the Navigation and Path Planning techniques.
[16]
robótica
Figure 1 . Platforms Services and their dependencies