FORMAÇÃO - PRÁTICAS DE ELECTRICIDADE
revista técnico-profissional
o electricista
50
Manuel Teixeira e Paulo Peixoto Formadores da ATEC - Academia de Formação
ficha prática n.º 19
{MOTORES PASSO-A-PASSO: PARTE I}
MÁQUINAS ELÉCTRICAS Máquinas eléctricas são máquinas cujo funcionamento se baseia em fenómenos do electromagnetismo. Um destes fenómenos é a indução electromagnética e o outro a força electromagnética. Estas máquinas podem classificar-se de várias formas, conforme as características que se pretendam realçar.
posição, que informe ao computador que o braço já está na posição determinada.
Uma das classificações é quanto ao movimento: há um tipo de máquina que é estática, por não ter peças em movimento. Trata-se do transformador. As restantes máquinas são, normalmente, rotativas, pelo facto de terem peças em movimento rotativo. A parte da máquina que é fixa chama-se estátor e a parte da máquina que é móvel chama-se rótor. Esta é a classificação habitual, por se referir às máquinas mais comuns, mas convém lembrar que há máquinas com peças móveis e que não são rotativas, devido ao seu movimento ser linear. É o caso do motor linear.
brushes
S
bearings
N current flow
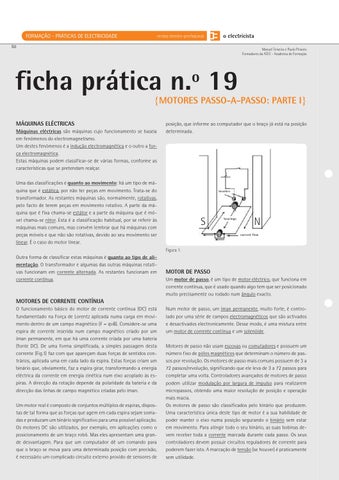
Figura 1.
Outra forma de classificar estas máquinas é quanto ao tipo de alimentação. O transformador e algumas das outras máquinas rotativas funcionam em corrente alternada. As restantes funcionam em corrente contínua.
MOTOR DE PASSO Um motor de passo, é um tipo de motor eléctrico, que funciona em corrente contínua, que é usado quando algo tem que ser posicionado muito precisamente ou rodado num ângulo exacto.
MOTORES DE CORRENTE CONTÍNUA O funcionamento básico do motor de corrente contínua (DC) está fundamentado na Força de Lorentz aplicada numa carga em movimento dentro de um campo magnético (F = qvB). Considere-se uma espira de corrente inserida num campo magnético criado por um íman permanente, em que há uma corrente criada por uma bateria (fonte DC). De uma forma simplificada, a simples passagem desta corrente (Fig.1) faz com que apareçam duas forças de sentidos contrários, aplicada uma em cada lado da espira. Estas forças criam um binário que, obviamente, faz a espira girar, transformando a energia eléctrica da corrente em energia cinética num eixo acoplado às espiras. A direcção da rotação depende da polaridade da bateria e da direcção das linhas de campo magnético criadas pelo íman. Um motor real é composto de conjuntos múltiplos de espiras, dispostas de tal forma que as forças que agem em cada espira sejam somadas e produzam um binário significativo para uma possível aplicação. Os motores DC são utilizados, por exemplo, em aplicações como o posicionamento de um braço robô. Mas eles apresentam uma grande desvantagem. Para que um computador dê um comando para que o braço se mova para uma determinada posição com precisão, é necessário um complicado circuito externo provido de sensores de
Num motor de passo, um íman permanente, muito forte, é controlado por uma série de campos electromagnéticos que são activados e desactivados electronicamente. Desse modo, é uma mistura entre um motor de corrente contínua e um solenóide. Motores de passo não usam escovas ou comutadores e possuem um número fixo de pólos magnéticos que determinam o número de passos por revolução. Os motores de passo mais comuns possuem de 3 a 72 passos/revolução, significando que ele leva de 3 a 72 passos para completar uma volta. Controladores avançados de motores de passo podem utilizar modulação por largura de impulso para realizarem micropassos, obtendo uma maior resolução de posição e operação mais macia. Os motores de passo são classificados pelo binário que produzem. Uma característica única deste tipo de motor é a sua habilidade de poder manter o eixo numa posição segurando o binário sem estar em movimento. Para atingir todo o seu binário, as suas bobinas devem receber toda a corrente marcada durante cada passo. Os seus controladores devem possuir circuitos reguladores de corrente para poderem fazer isto. A marcação de tensão (se houver) é praticamente sem utilidade.