Francisco J. Rodríguez Lera, Vicente Matellán, Miguel Á. Conde Dept. of Mechanical, Computer and Aerospace Eng., Universidad de León, Campus de Vegazana, (León), Spain Email: {fjrodl, vicente.matellan, mcong}@unileon.es Francisco Martín Rico Dept. Teoría de la Señal y Com. y Sist. Telem. y Comput., Universidad Rey Juan Carlos Fuenlabrada, (Madrid) Spain Email: francisco.rico@urjc.es
artigo científico 8
robótica 110, 1.o Trimestre de 2018
robótica
Make me different! Motivational‑based architecture for uniqueness behavior in robotics competitions ABSTRACT The use of common frameworks and open source libraries for programming robots are causing the perception that robots share the same repetitive behaviors. This is happening not only in a singular robot, sometimes even among different robots. It can be easily observed at robotic competitions, where several robots face the same tasks. Perceived behavior plays a significant role in the acceptation of robots by people. The interpretation of these behaviors by spectators is a cornerstone in order to establish some kind of human-robot attachment. This paper presents a motivational based architecture to generate more natural behaviors in autonomous robot behaviors. The outcome comes in two ways, quantitatively, the robot acts differently each loop of execution attending the motivation in that moment and qualitatively, spectators in robotics competitions perceive a new level of robot’s abilities.
1. INTRODUCTION Robotics competitions present a formal, goal-oriented environment, where the main purpose is to do tasks in a bounded window of time with the minimal number of errors. In this scenario, each team has to do their software developments in order to fulfill the tasks and face the tasks from two points of view: they are an experienced group and they have a well-defined set of libraries or they use off-the-shelve solutions with slight modifications. In both cases, the tasks are performed in the same way again and again, only changing if large environmental changes happen. In this way, spectators perceive repetition of the same behaviors.
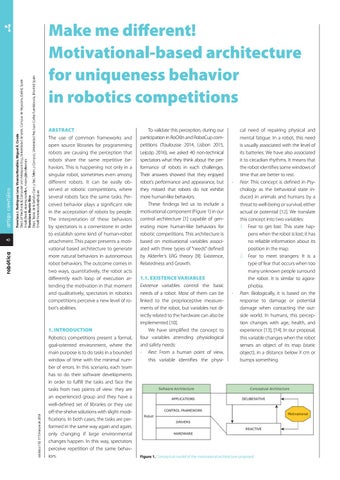
To validate this perception, during our participation in RoCKIn and RoboCup competitions (Toulousse 2014, Lisbon 2015, Leipzip 2016), we asked 40 non-technical spectators what they think about the performance of robots in each challenges. Their answers showed that they enjoyed robot’s performance and appearance, but they missed that robots do not exhibit more human-like behaviors. These findings led us to include a motivational component (Figure 1) in our control architecture [1] capable of generating more human-like behaviors for robotic competitions. This architecture is based on motivational variables associated with three types of “needs” defined by Alderfer’s ERG theory [9]: Existence, Relatedness and Growth. 1.1. EXISTENCE VARIABLES Existence variables control the basic needs of a robot. Most of them can be linked to the proprioceptive measurements of the robot, but variables not directly related to the hardware can also be implemented [10]. We have simplified the concept to four variables attending physiological and safety needs: • Rest: From a human point of view, this variable identifies the physi-
•
•
cal need of repairing physical and mental fatigue. In a robot, this need is usually associated with the level of its batteries. We have also associated it to circadian rhythms. It means that the robot identifies some windows of time that are better to rest. Fear: This concept is defined in Psychology as the behavioral state induced in animals and humans by a threat to well-being or survival, either actual or potential [12]. We translate this concept into two variables: 1. Fear to get lost: This state happens when the robot is lost; it has no reliable information about its position in the map. 2. Fear to meet strangers: It is a type of fear that occurs when too many unknown people surround the robot. It is similar to agoraphobia. Pain: Biologically, it is based on the response to damage or potential damage when contacting the outside world. In humans, this perception changes with age, health, and experience [13], [14]. In our proposal, this variable changes when the robot senses an object of its map (static object), in a distance below X cm or bumps something.
Figure 1. Conceptual model of the motivational architecture proposed.