LOCATION: Architectural Association | London, U.K.
TYPOLOGY: ACADEMIC RESEARCH / TEACHING
DATE: 2014-2015
Students: Sasila Krishnasreni | Duo Chen | Yiqiang Chen | Liu Xiao
Tutors: Robert Stuart Smith | Tyson Hosmer | Manos Matsis
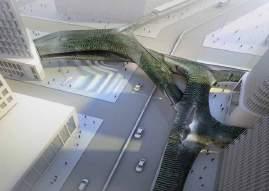
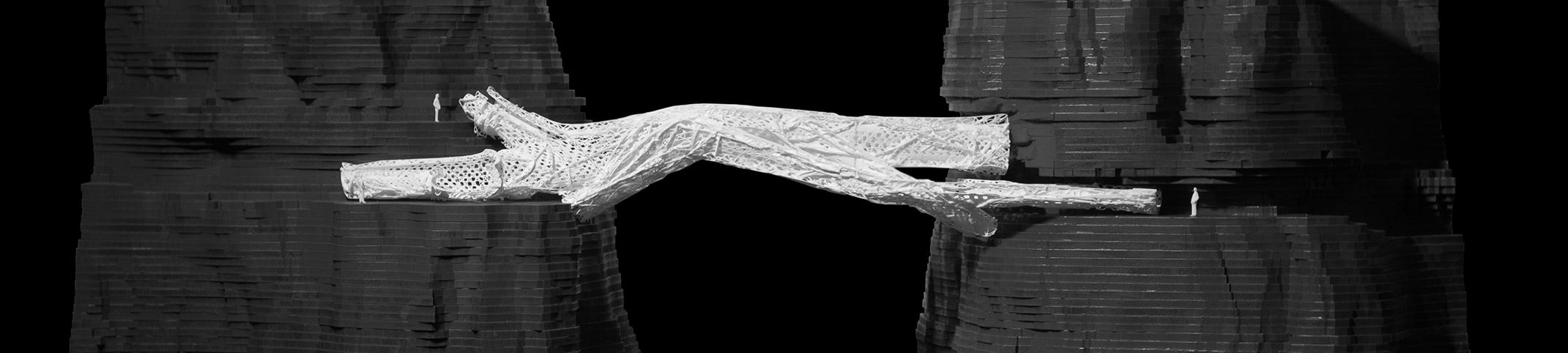
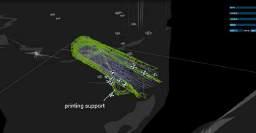
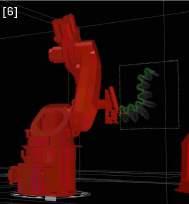
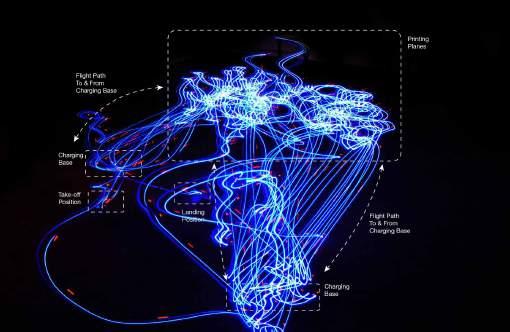
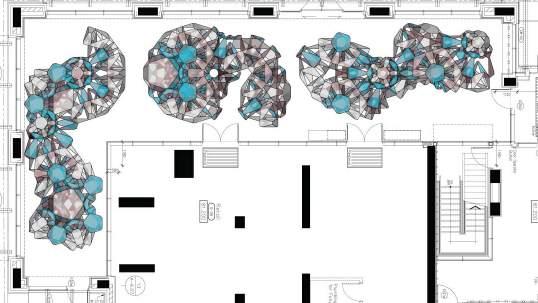
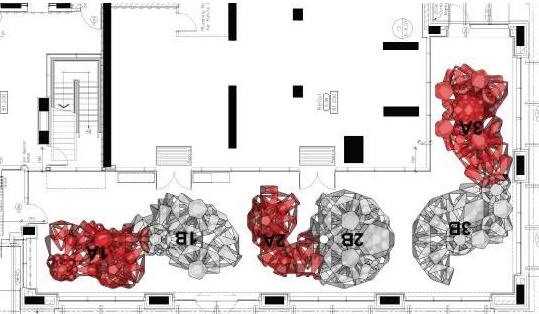
The research proposes a non-standard construction process created by a swarm of UAVs. This process merges design and production into a singular process, based on the behaviors of robotics systems and composite materials that are rapid phase changing, cured by uv tools or natural sunlight. In contrast to conventional construction techniques, our system harnesses UAVs techniques in order to propose a construction process that can be pre-designed yet allow for flexibility in order to be implementable within a variety of environments through flight behaviors, material and structure growth logics and real-time optimization. We propose construction of lightweight cantilever and bridging structures in hard to access locations. Such structures in these scenarios arise from
the printing sequences of the swarming drones and their responses to the real-time structural analysis. This process alleviates the need for scaffolding in what is often a complex and awkward site-specific location whilst producing designs that are structurally and therefor materially efficient. In responding to the intricacies of complex site conditions spaces difficult to construct within such as the high spaces between buildings, mountains and cliffs become territories for further architectural development.The research argues for a time based system adaptive process that is flexible in material organization, form, structure, scale and configuration that is capable of responding to fluctuations in local environments and weather, structural and material behaviour. .
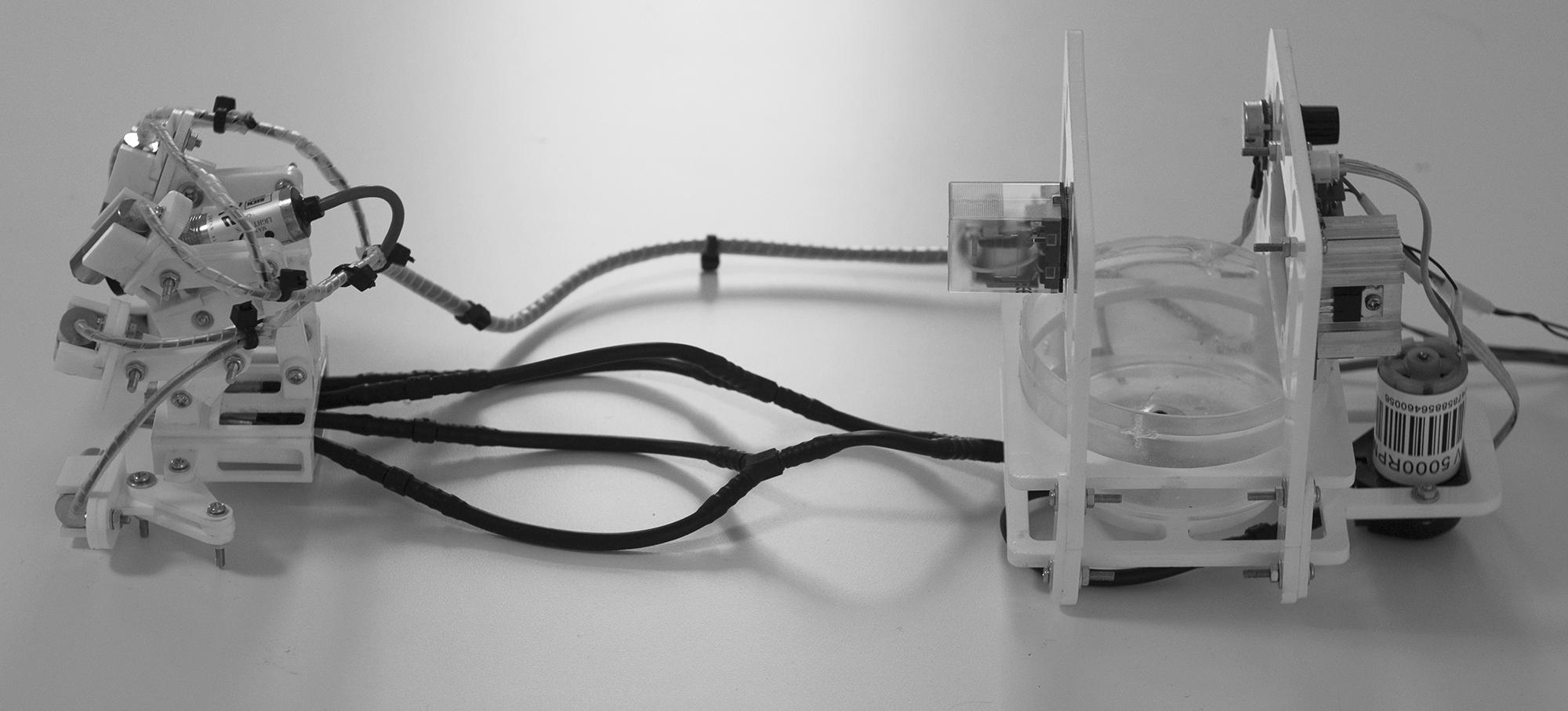
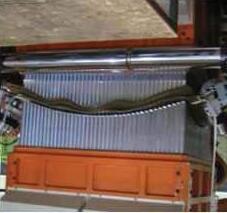
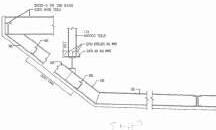
2. Stainless steel nozzle
3. Adjustable legs
4. Rotational Plates
5. Black silicone tubes (5mm)
6. 12 Voltage Peristaltic pump (getting resin back from the tray)
7. 12 Voltage Peristaltic pump (pumping resin to the nozzle)
8. Motor speed control
SWARM PRINTING //
CRAZYFLIE SWARM FLIGHT COORDINATION PHOTO
FLIGHT COORDINATION TESTING | WAYPOINTS
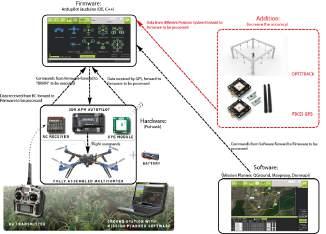
FLIGHT CONTROL LOGISTICS | DIAGRAM
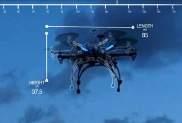
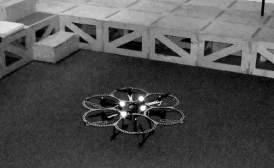
HEXACOPTER DRONE | PHOTO
FLIGHT CONTROL | HOVERING DEVIATION TESTING
FLIGHT COORDINATION TESTING | HEXACOPTER
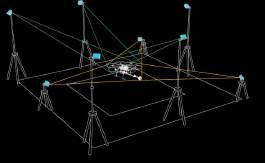
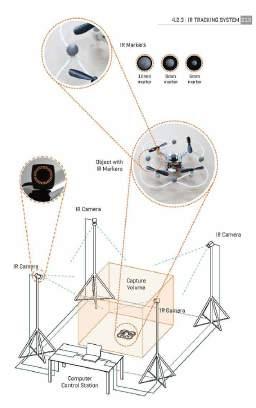
OPTITRACK IR CAMERA | TESTING FACILITY SETUP DIAGRAM
OPTITRACK IR CAMERA | PHOTO
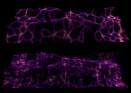
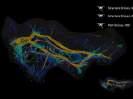
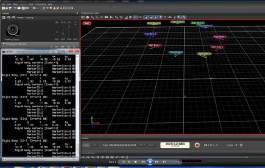
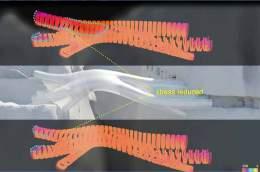
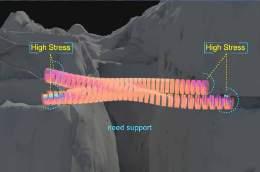
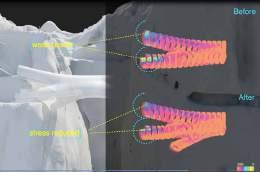
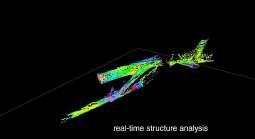
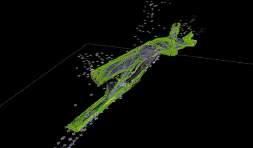
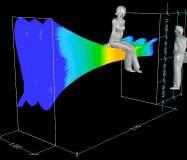
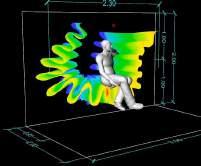
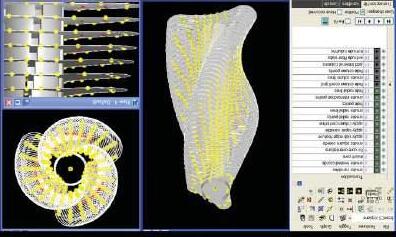
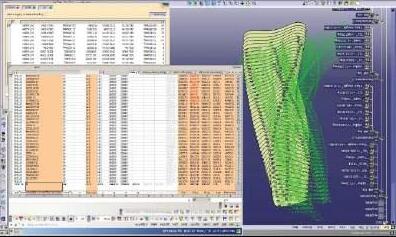
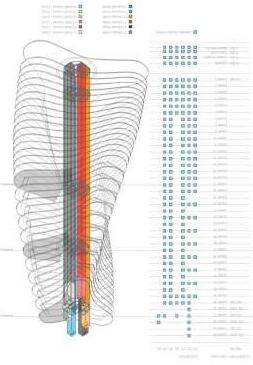
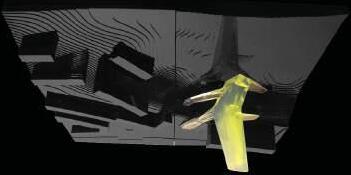
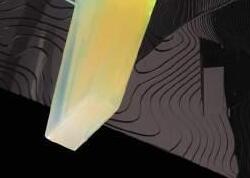
--We get a realtime data stransmission between printing and FEM structre analysis. As we can seen in this simulation, every segment’s information of printing structure will be sent to FEM analysis before it is printed and the FEM will give the feedback.
REALTIME STRUCTURE ANALYSIS
REALTIME FEM STRUCTUAL ANALYSIS | SIMULATIONS
Euphorbotics AADRL Research
LOCATION: Architectural Association | London, U.K.
TYPOLOGY: ACADEMIC RESEARCH / TEACHING
DATE: 2016-2017
Students: Nessma Al Ghoussein | Qi Cao | Jurij Ličen | Deniz Topcuoglu
Tutors: Robert Stuart Smith | Tyson Hosmer | Melhem Sfeir
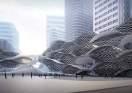
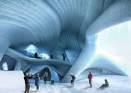
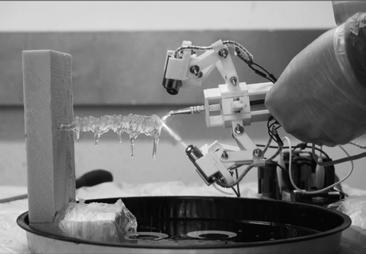
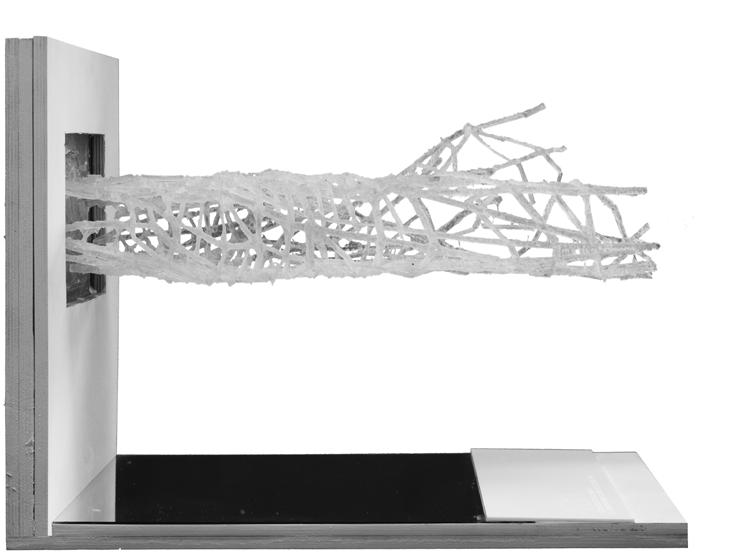
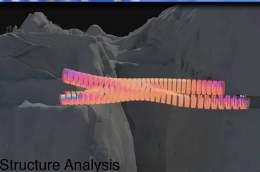
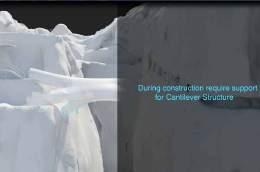
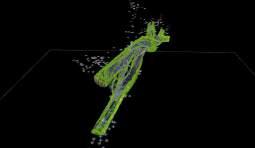
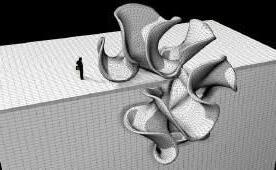
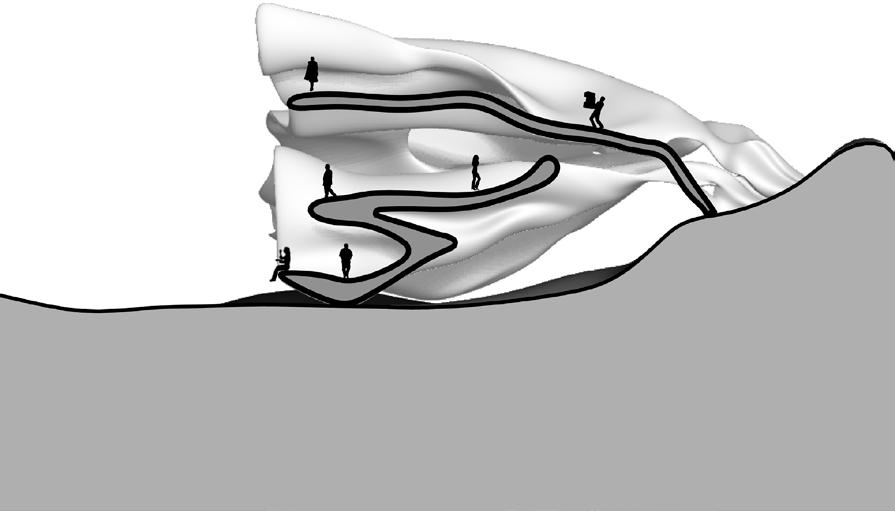
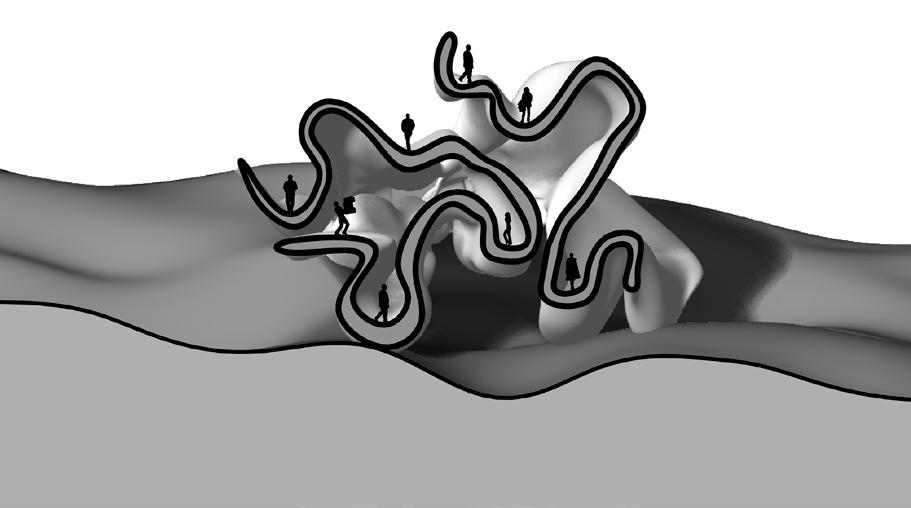
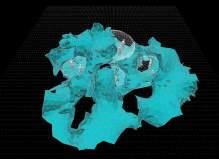
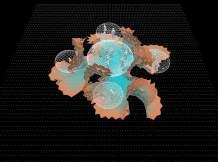
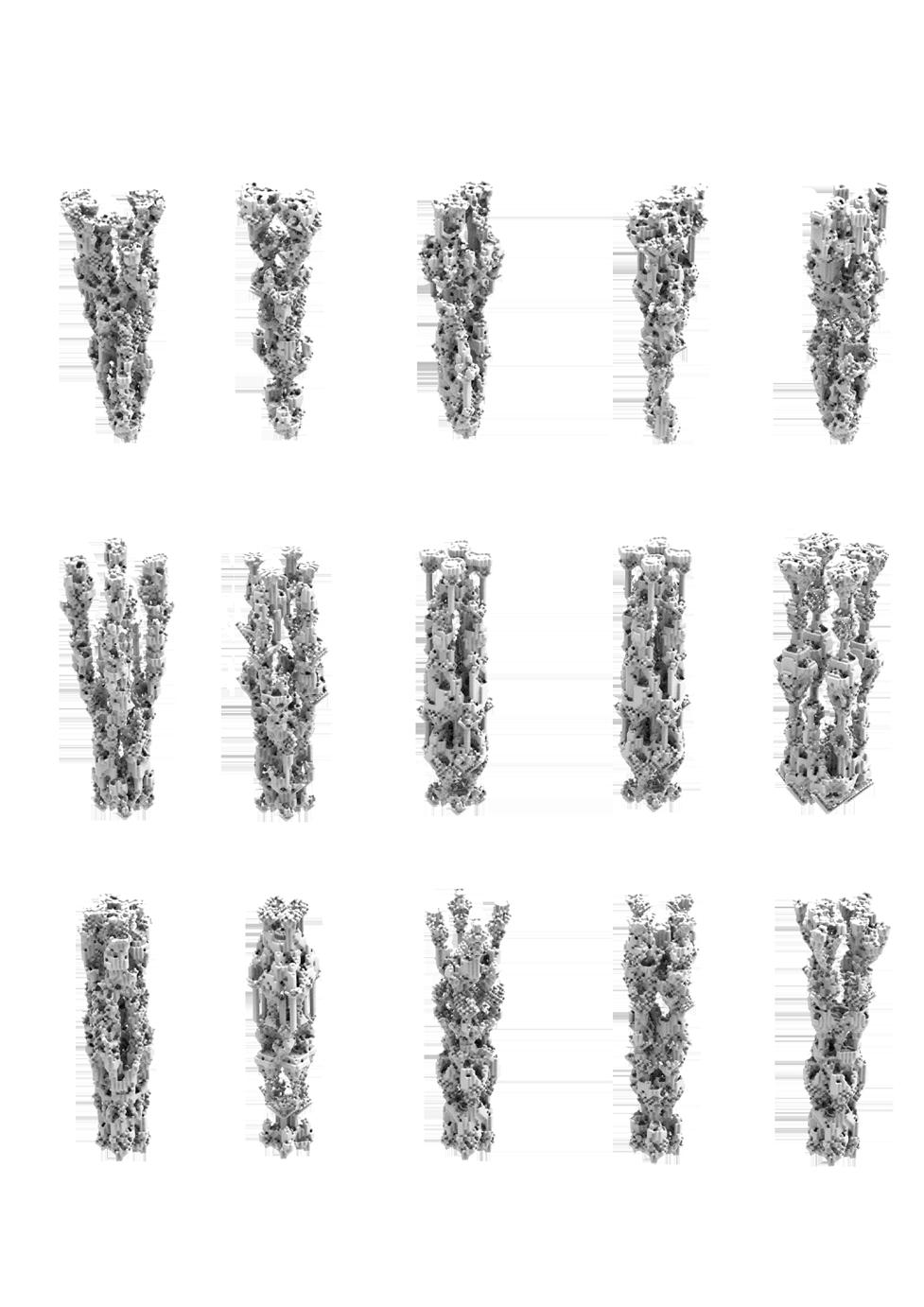
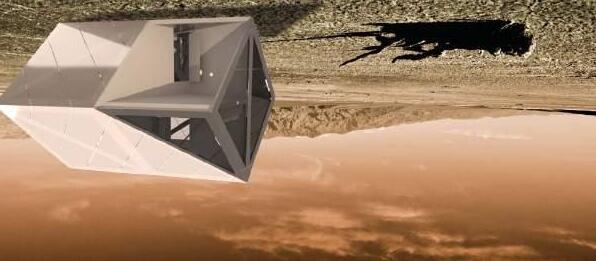
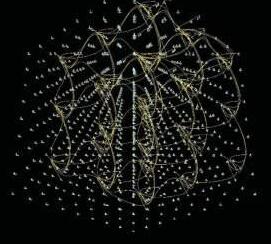
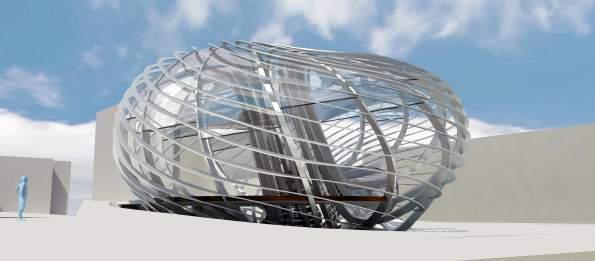
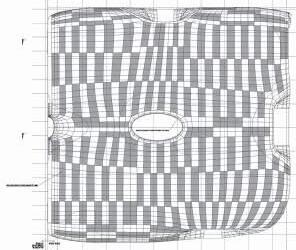
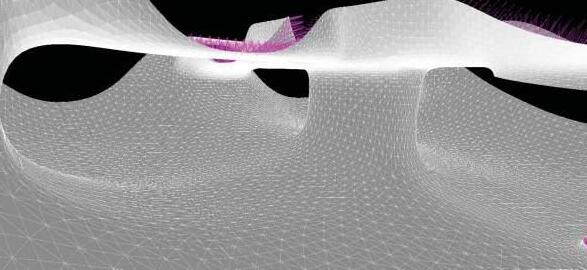
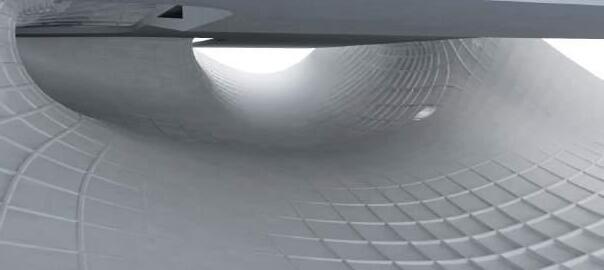
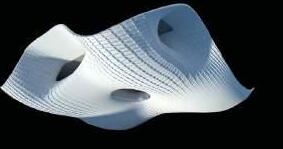
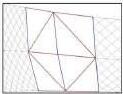
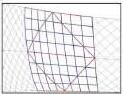
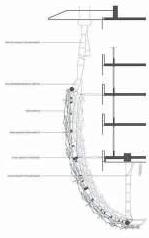
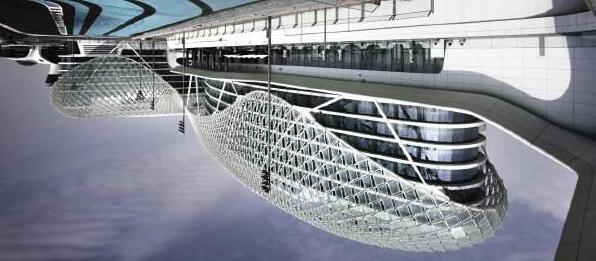
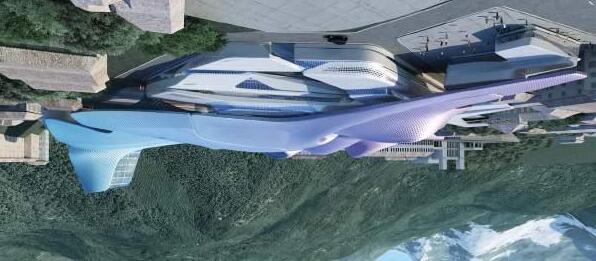
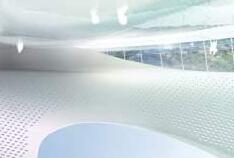
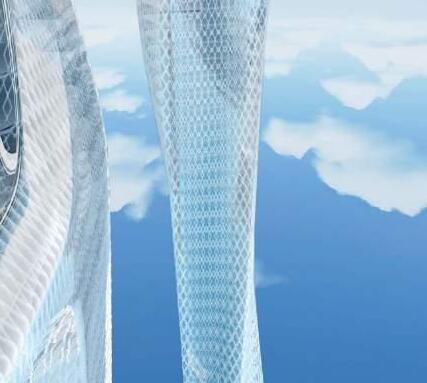
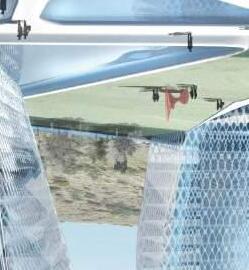
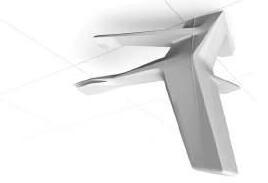
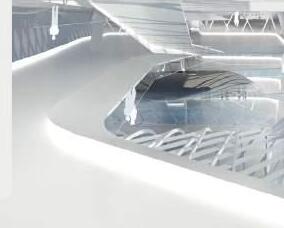
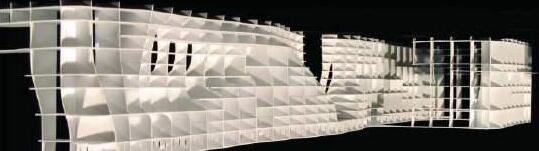
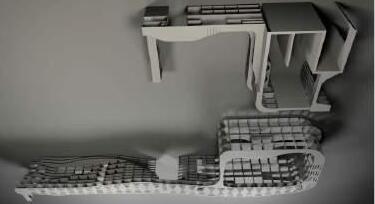
This speculative project forms part of AADRL Studio Robert Stuart-Smith’s research and participation within the EPSRC Research grant “Aerial Additive Building Manufacturing” that investigates using multicopters to 3D Print building structures. The project situates aerial robotic 3d printing as a negotiation between digital and physical material composition where both require algorithmic control in order to develop a speculative design system for a prototypical house in remote mountainous terrains. Utilising expandable foam as a 3d print material, deposition is difficult to predict or control due to the phase changing properties of the material which exhibits a rapid expansion in volume and a transition from a liquid to a solid state that is far from instant. In order to produce a structurally viable
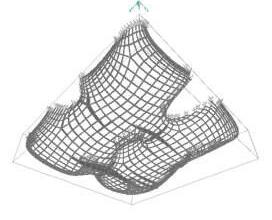
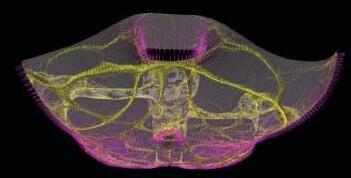
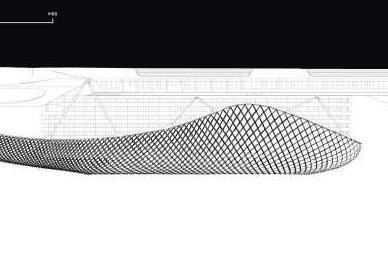
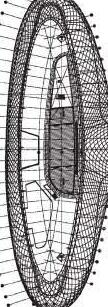
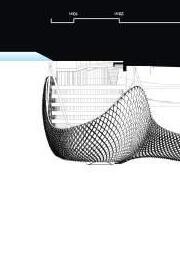
design from this lightweight material, formation has been strategised as a closed loop generative process that feeds back 3d scans of already printed material in order for on-going construction to adapt to real-world information. Design is undertaken in step with construction, and is developed in such a way as to ensure 3d print deposition sequences are able to be practically executed by the UAVs. This generative process essentially ‘grows’ a surface that aims at increasing the spatial parameters of volume and enclosure, whilst minimising surface area and therefore material. The surface employs techniques of undulation and ribbing, thereby increasing its geometric complexity, which ensures its structural stability all throughout its construction phases, without the need for external scaffolds.
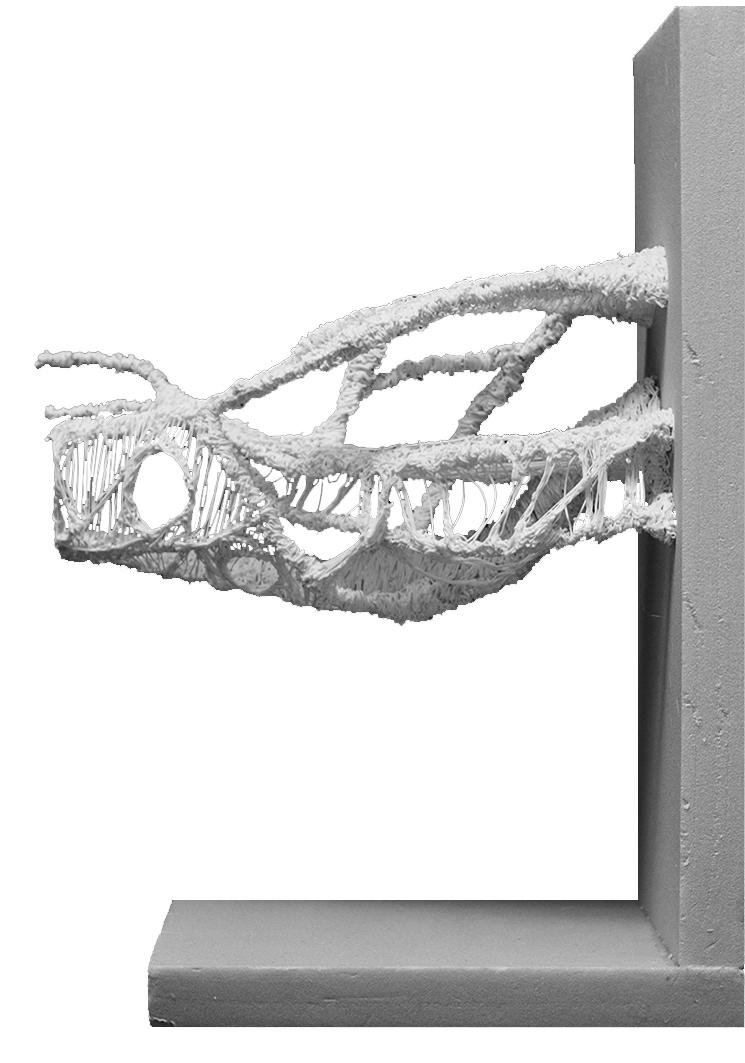
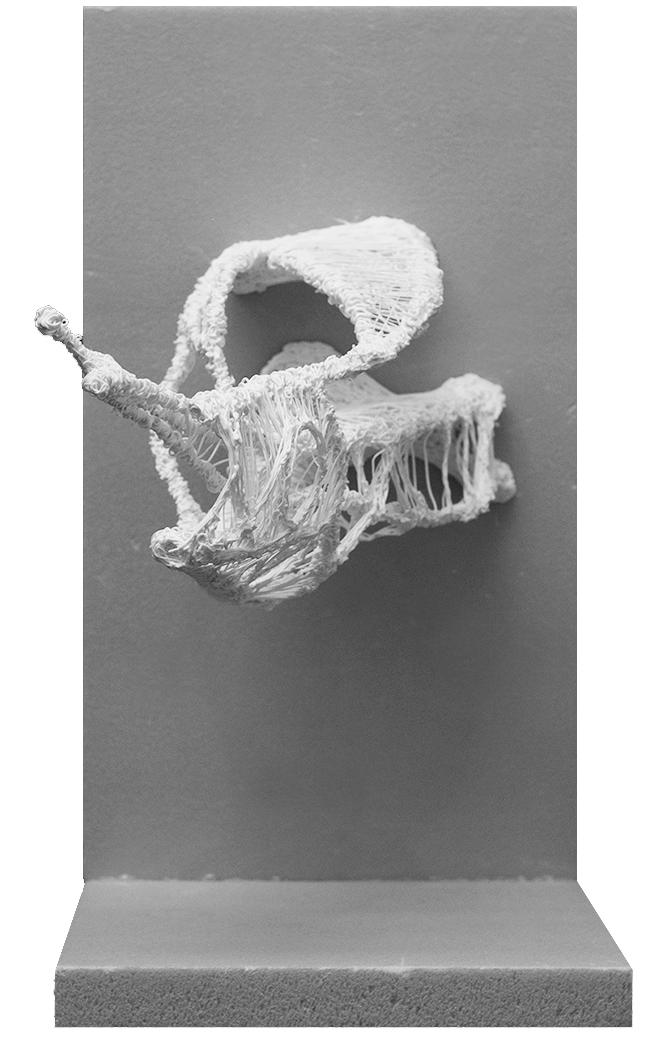
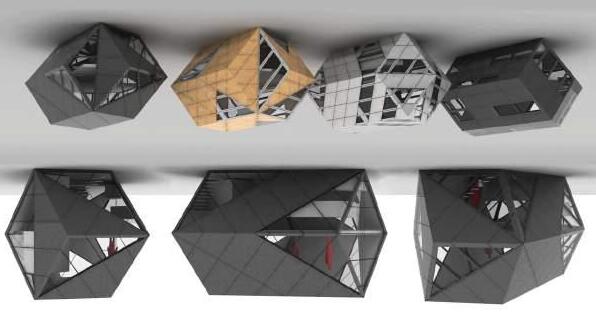
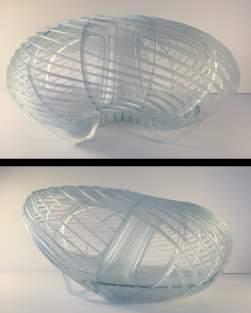
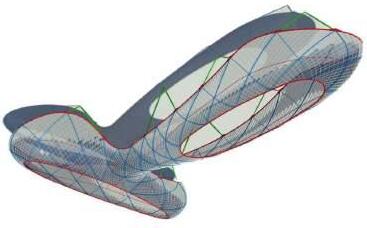
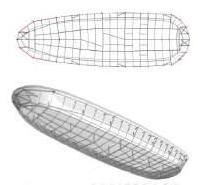
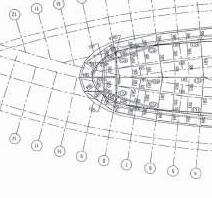
1:1 STRUCTURAL MODEL
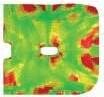
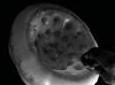
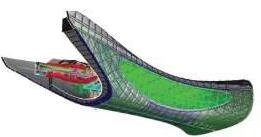
In order to combine all the information gained in the previous material experimentations, to test out these learnings and answer the obvious question of whether foam can be a material for actual construction and hold the dead and live loads of inhabitance, the studies evolved into a full 1 to 1 scale construction of a cantilevering model, where the strategy of the thesis research of corrugation at 3 scales is implemented.
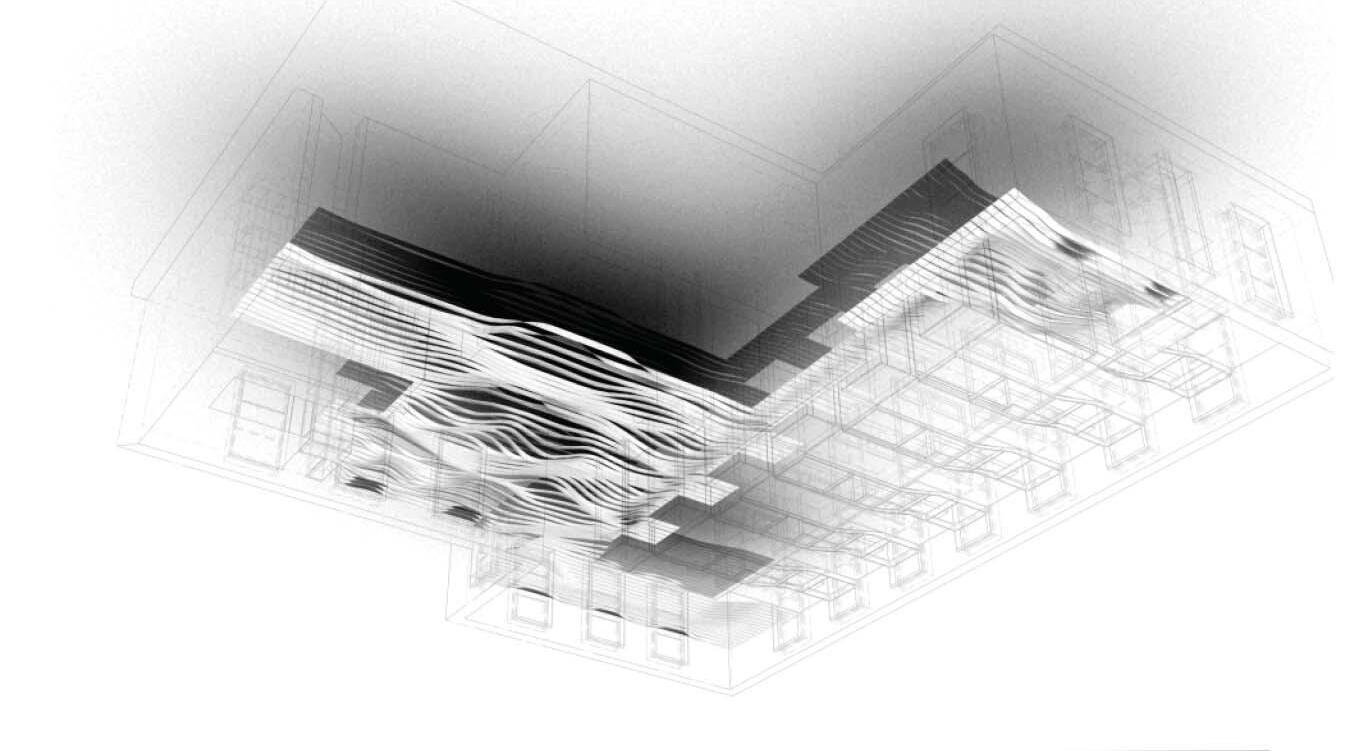
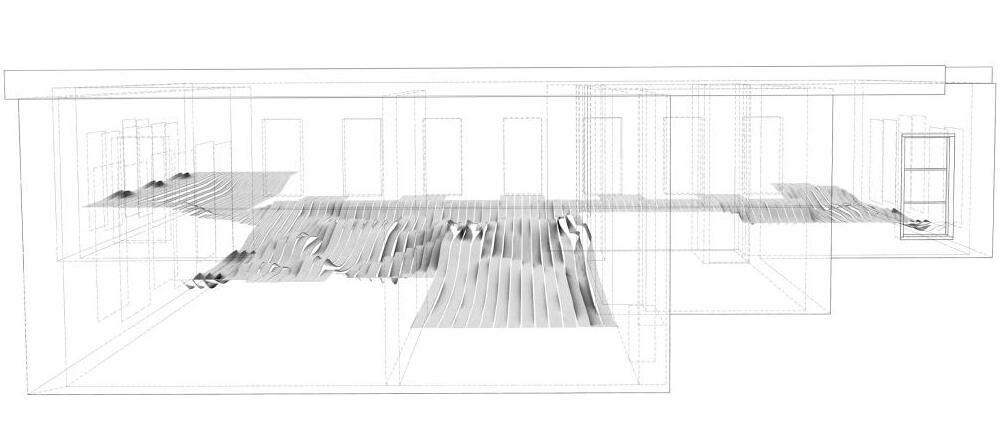
As a result of a series of these digital experimentations, the optimal evaluations of the structures meet at common understanding of the parameters. These solutions for achieving structurally accepted deviation scores can be summarised as follows:
As a result of a series of these digital experimentations, the optimal evaluations of the structures meet at common understanding of the parameters. These solutions for achieving structurally accepted deviation scores can be summarised as follows: - higher rib counts
- higher rib counts
- larger rib depths
- greater thickness of the shell cross-sections
-
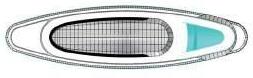
1 | The bigger curved surface
2 | The ribbing
3 | The printing technique.
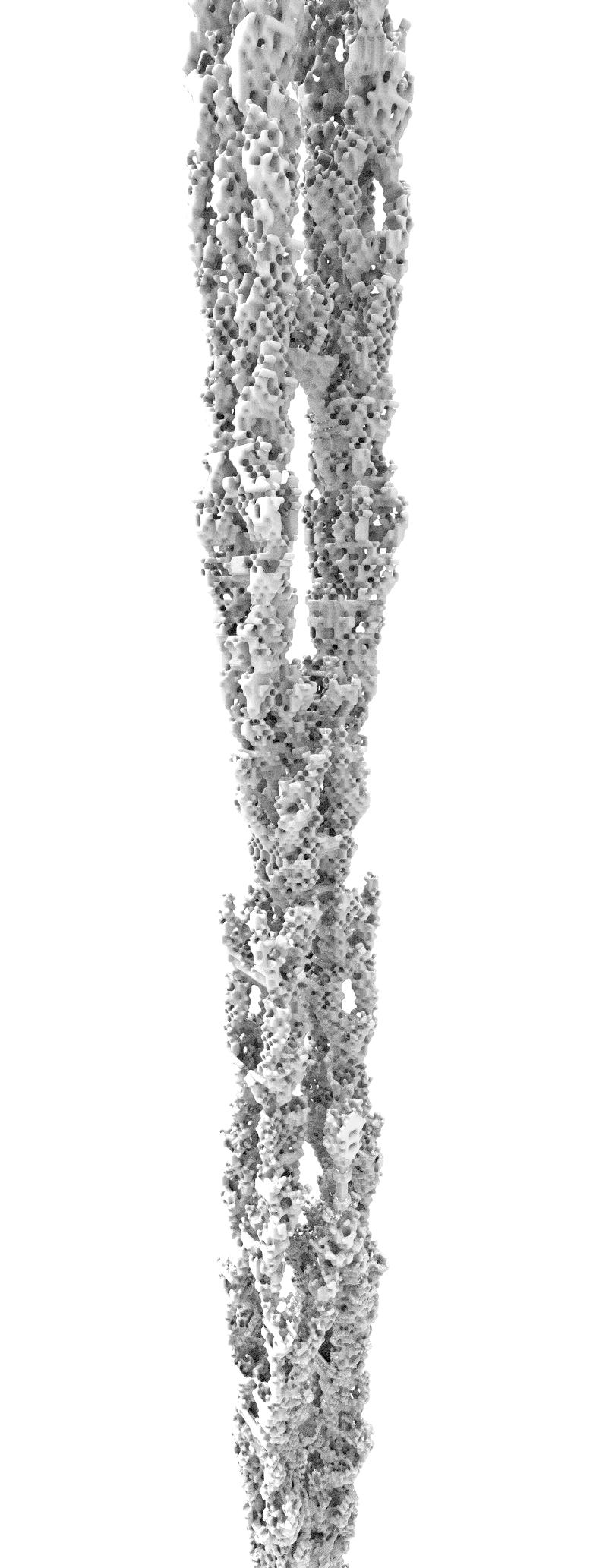
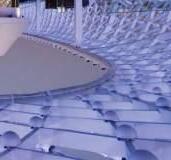
As the print expanded, the printing plane begins to distort, growing in all 3 dimensions. This manual print took roughly 20 hours to complete, using 26 cans of foam, and totaling the cost of approximately 300 pounds.
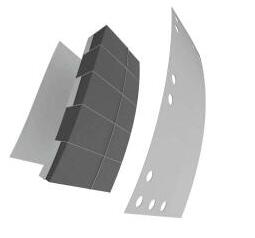
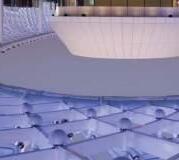
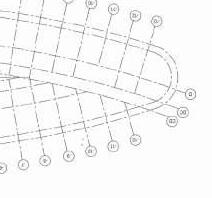
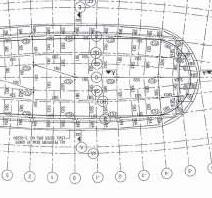
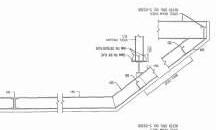
2ND DEGREE OF CORRUGATION
-
RIB DEPTH | 0.23 - 1.55 SHELL CROSS-SECTION | 10
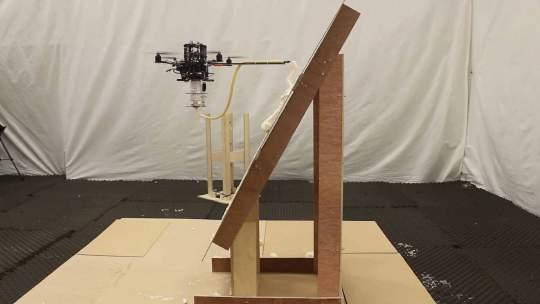
INITIAL LAYER OF THE 1:1 STRUCTURAL CANTILEVER
|
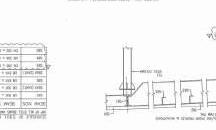
EXPERIMENT 3 | PRINTING THE SECOND LAYER
As the previous straight line printing was a proof of the concept of aerial printing with the developed end-effector, the UAV experiments were ended with a second layer printing test. This time, the same line with a modified position was given as the target regarding the estimated expansion amount of the 1st layer.
During these tests, missing one of the most important system elements of the thesis research was found out as the major reason of the failure. A scanning process was needed to modify the trajectories according to the already printed material as the foam expanded in different rates than expected.
MIN. Distance of the Trajectories to the Previous Layer | - 2 cm
MAX. Distance of the Trajectories to the Previous Layer | + 8 cm
This example is the first 2nd layer trial in which the exact same points of the first layer with a 5cm offset positions were given as the trajectory points. As the first segment of the previous layer was thin enough for the printing, the test was initiated. However, the uneven deposited part of the first layer caused a problem and the printing nozzle got stuck in that segment and the deposition failed. On the other hand, this caused a bigger problem since the UAV tried to continue its flight but it couldn’t move which ended up losing the control of the drone at some point.
MIN. Distance of the Trajectories to the Previous Layer | 0 cm
MAX. Distance of the Trajectories to the Previous Layer | + 10 cm
Even though the trajectory points were moved 2cm further, similar to the first test, the uneven segment of the previous layer caused the printing nozzle got stuck. This time, it happened when the UAV was trying to reach its starting point but it fell directly to the deposited foam. The end-effector wasn’t initiated at all. This showed that moving the trajectory points all together without modifying individually is not enough to achieve a successful deposition and as it is impossible to make this arrangement in the actual construction process, scanning is needed.
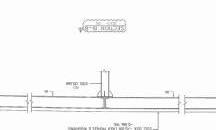
MIN. Distance of the Trajectories to the Previous Layer | + 4 cm
MAX. Distance of the Trajectories to the Previous Layer | + 5 cm
For this particular test, the trajectory points were modified individually according to the previously printed layer which means the positions of the points were given in a 3-dimensional path. Thus, the uneven segments of the first layer didn’t cause a problem. The second layer followed the path of the previous one, sticking properly with the modified material deposition pressure (which was solved earlier). Overall, all the tests proved the point that printing on the side of the UAV was an accurate decision to prevent the wind of the propellers blow away the deposited foam.
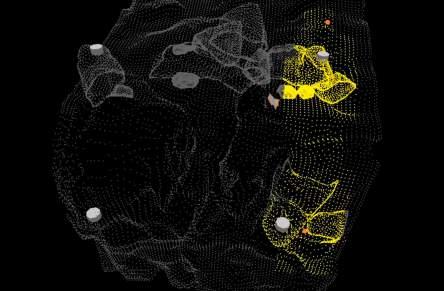
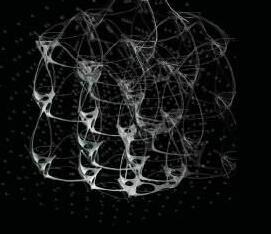
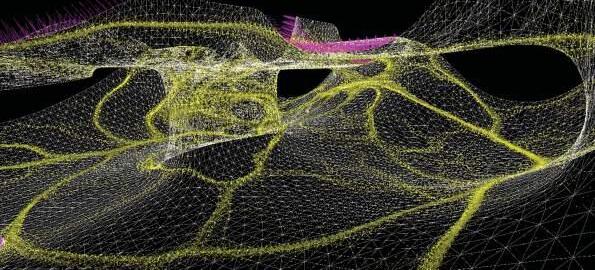
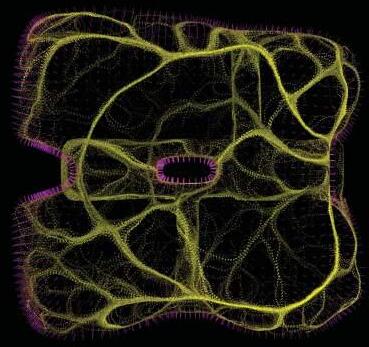
A digital mesh is created and its growth pattern is rebuilt with certain amount of trajectory points which the UAV (AscTec Pelican) will follow during the aerial printing process. Those trajectory points inform the quadcopter about the material deposition path and location.
Following the digitally grown mesh model, the printer UAV deposits expanding foam to the desired locations. It is crucial at this point the drone precisely follows the trajectory points as the upcoming steps of the loop will be one-toone connected to this digital model.
After a couple of layers are printed, the scanner UAV (Parrot AR Drone) performs a real-time scanning of the physical model by taking photos with its on-board camera. For this action, the UAV flies around the printed material by its yaw, pitch and roll flight moves.
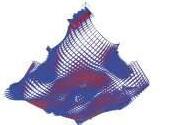
The scanning photos are assembled to generate a digital mesh model of the printed material and later it is integrated with the original mesh to compare and evaluate the deviation between the digital (expected) and the physical (actual) prints.
The last step of the cycle is the adjustment of the original mesh according to the input data came from the scanner UAV. The growth algorithm detects any deviation occurred in the printing process (mainly related to the unexpected expansion of the foam) and creates a new mesh growing from the latest printed layer in order to restart the cycle.
1. Micro location scan revealing the need for wind wall construction.
Point
3. Digital growth.
5. Digital growth.
Void AADRL Research
LOCATION: Architectural Association | London, U.K.
Tutors: Robert Stuart Smith | Tyson Hosmer | Manos Matsis
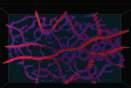
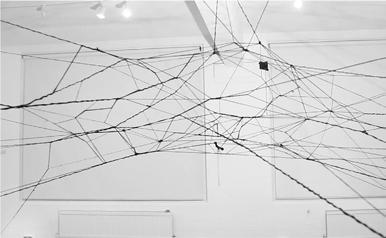
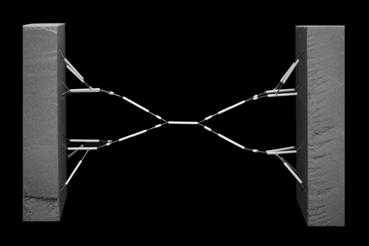
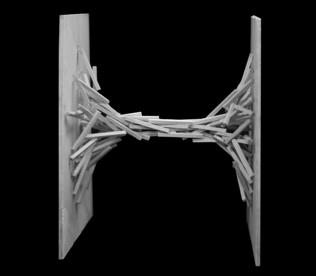
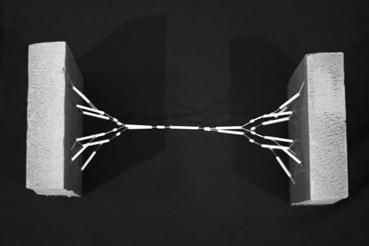
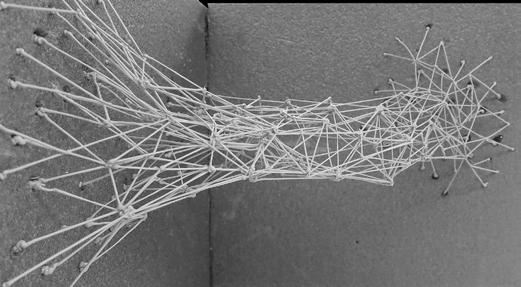
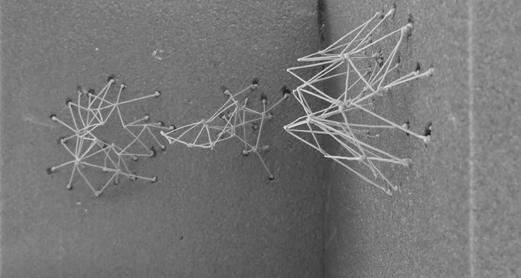
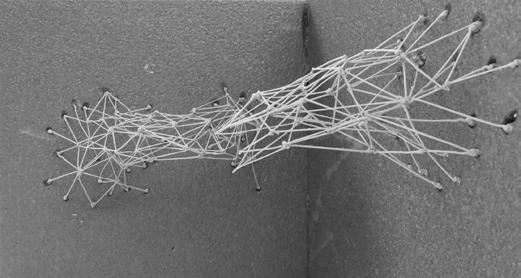
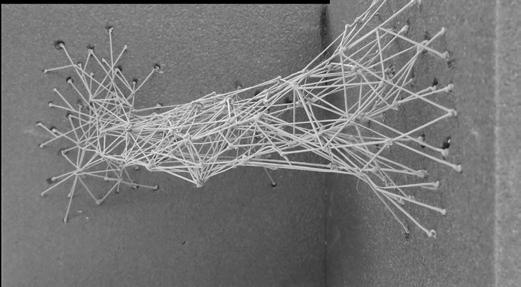
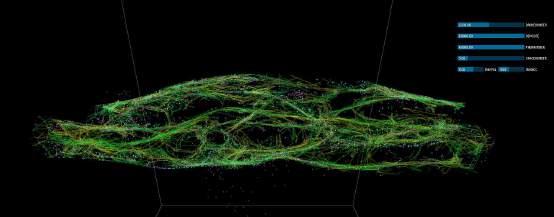
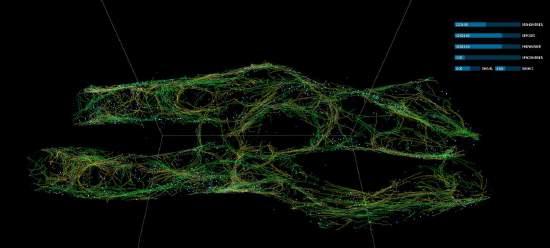
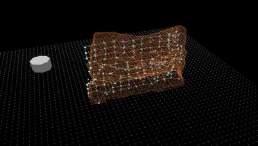
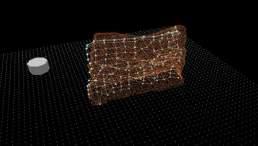
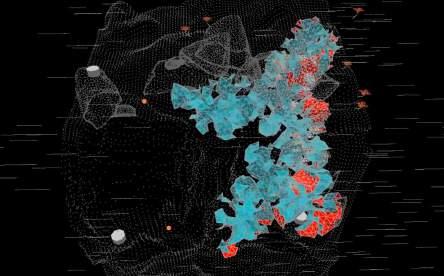
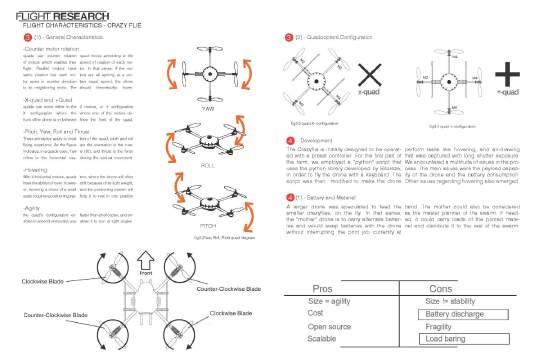
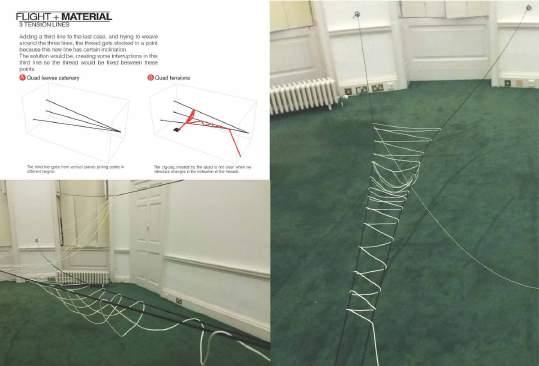
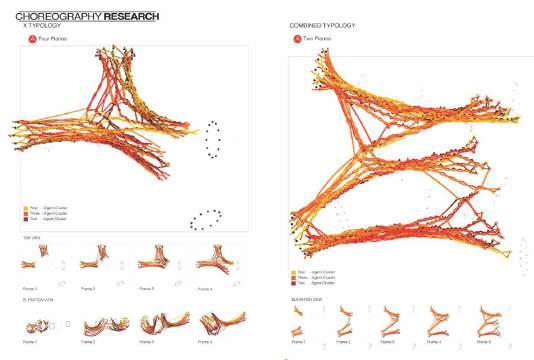
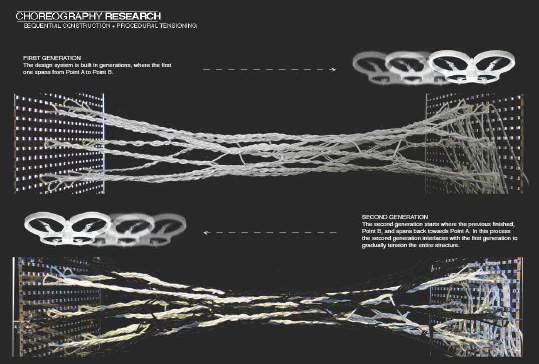
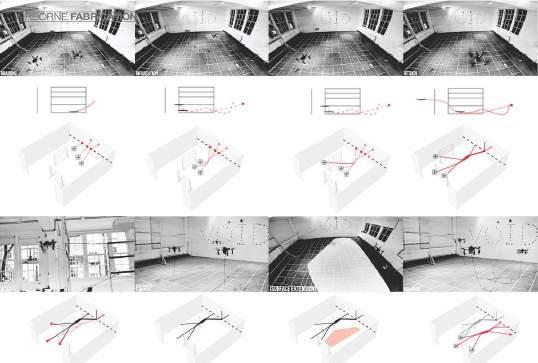
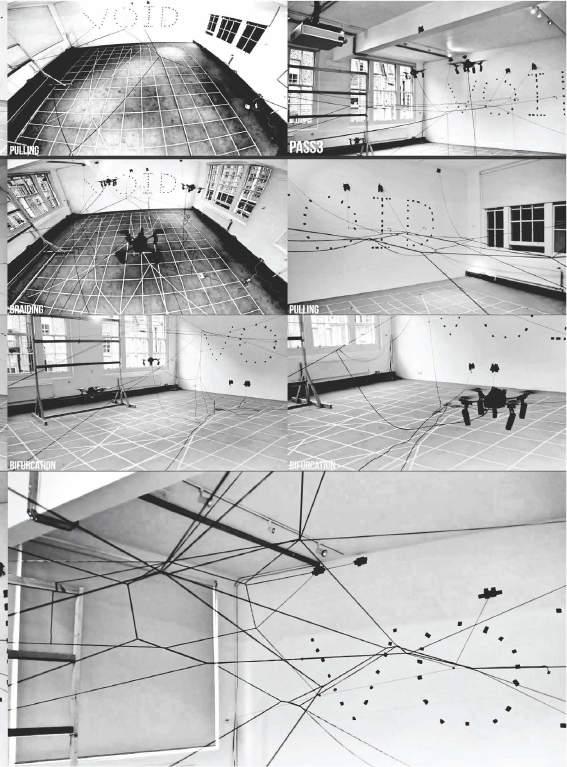
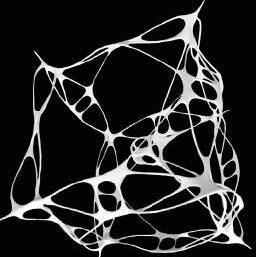
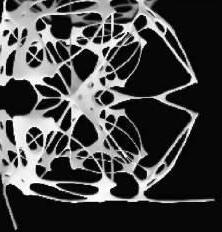
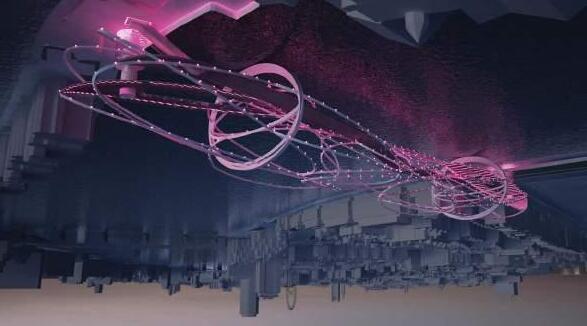
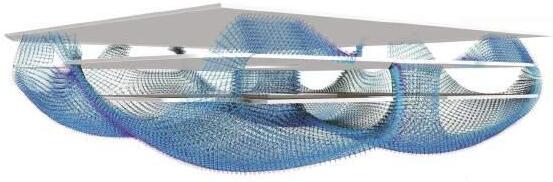
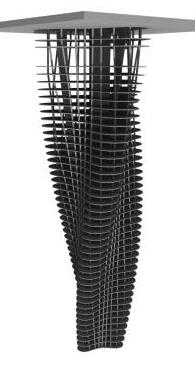
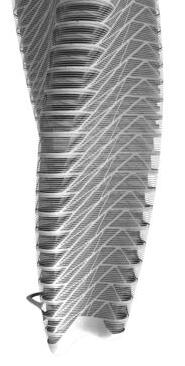
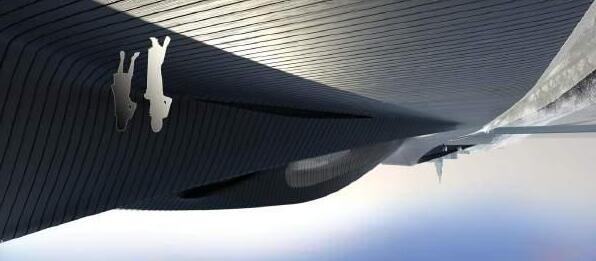
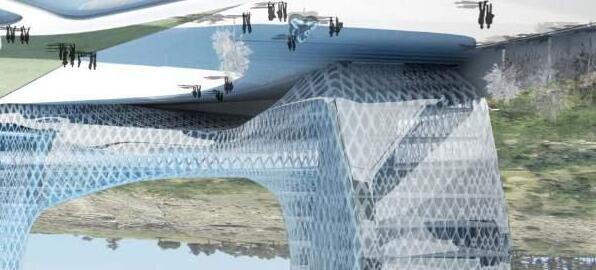
Our thesis employs airborne agency, in the form of a mechanical unit (quadrotor), to work as a real-time design and construction swarm. This swarm would perform in an autonomous and choreographed manner, and should adapt to external fluctuation from the environment and the user. The construction system would be fast, labor free and unrestrained by distance. Our design research exploits the structural ability of tensile elements such as cables, to span over large distances, both horizontally and vertically, while maintaining structural integrity. It explores the possibility of combining structure and space within one complete system that connects points over a distance. In conventional
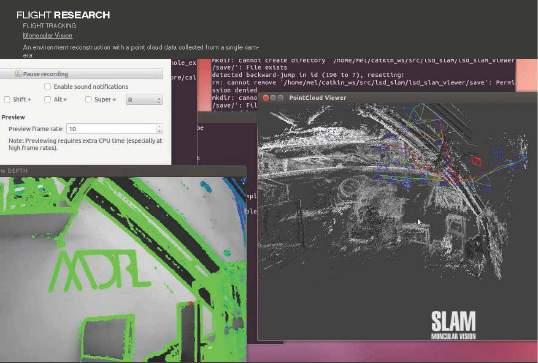
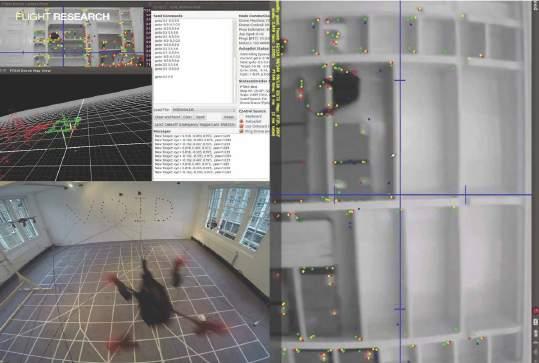
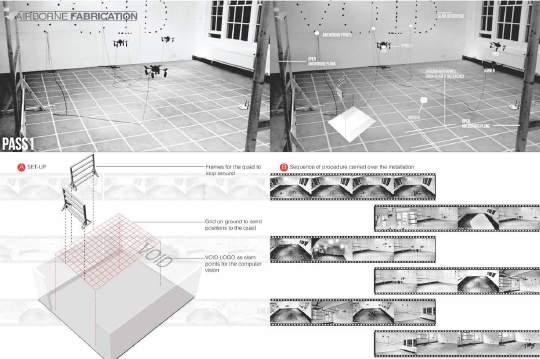
construction, the structure is built through stacking process over a base. In horizontal construction, one that is based on cantilevering, the span is limited by the resistance moment of one support at point A. This process is repeated while gradually increasing tension and structural stability to the system and abolishing the cantilevering constraints present in conventional construction. The research developed techniques of flight control and computer vision with ROS (Robotic Operating System), IR Camera tracking, SLAM (Simultaneous Localisation and Mapping), and OpenCV culminating in a tensile structure produced by the coordinated efforts of a swarm of airborn construction units.
COMPUTER VISION DEVELOPMENT | SIMULTANEOUS LOCALISATION AND MAPPING (SLAM)
COMPUTER VISION DEVELOPMENT | SIMULTANEOUS LOCALISATION AND MAPPING (SLAM)
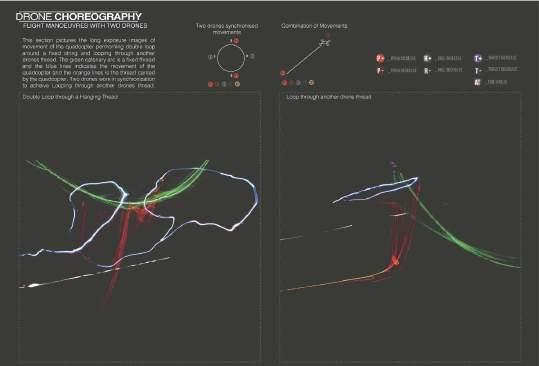
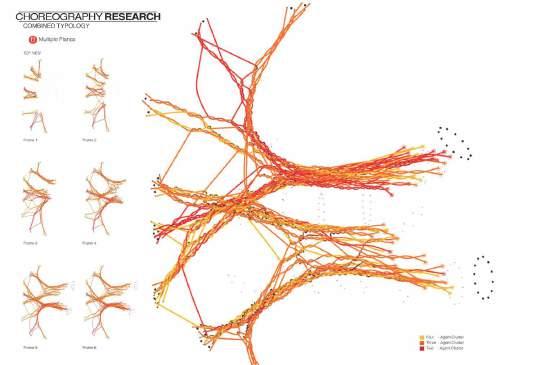
DRONE CHOREOGRAPHY | HUMAN ROBOT INTERACTION
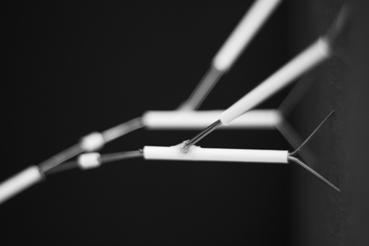
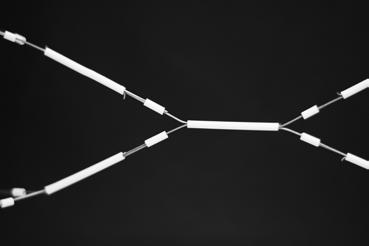
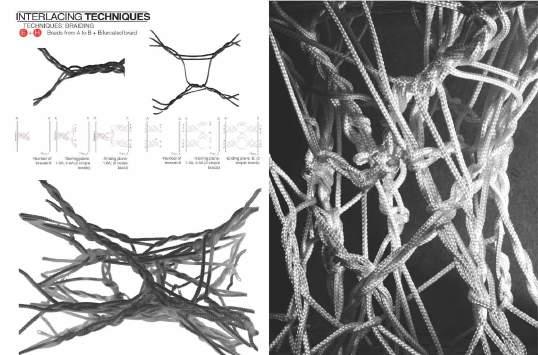
DRONE CHOREOGRAPHY | TENSILE BRAIDING
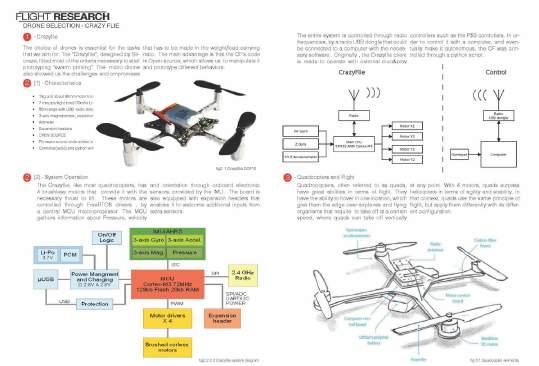
FLIGHT RESEARCH | DRONE SELECTION
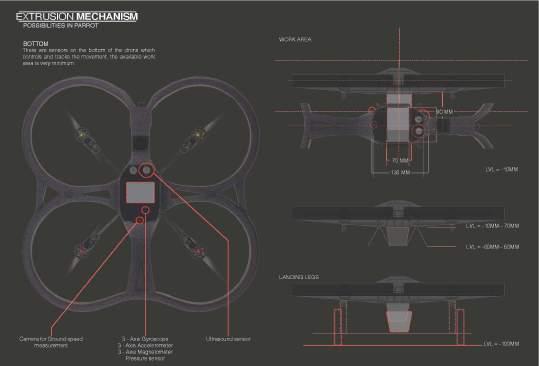
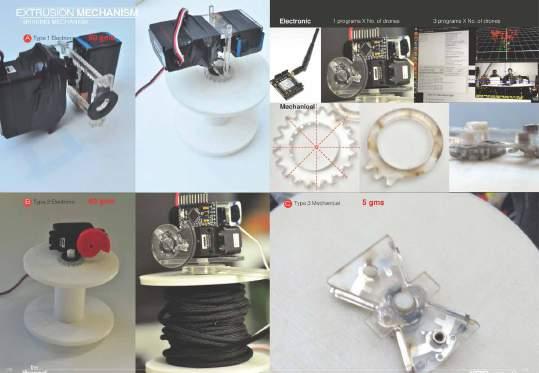
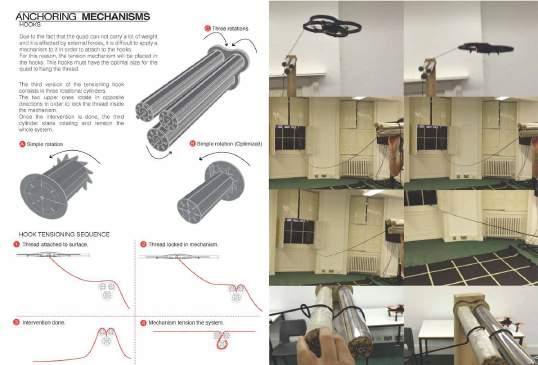
EXTRUSION MECHANISM | ROBOT DEVELOPMENT
PARROT DRONE | ROBOT DEVELOPMENT
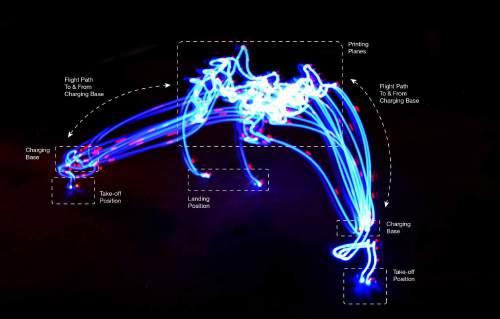
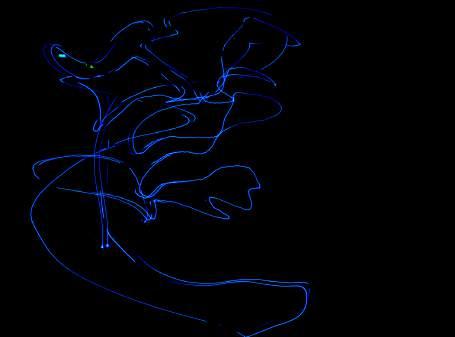
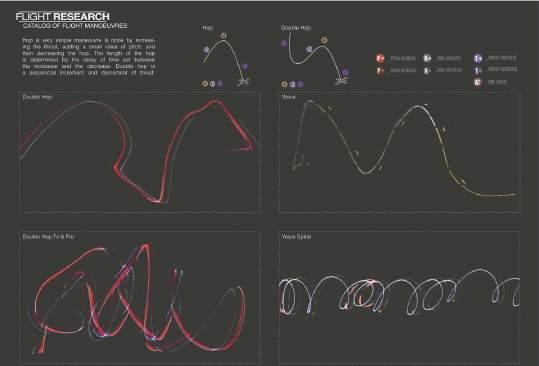
FLIGHT
FLIGHT MANOUVERS TIMELAPSE FOOTAGE
FLIGHT RESEARCH | FLIGHT MANOUVERS TIMELAPSE FOOTAGE
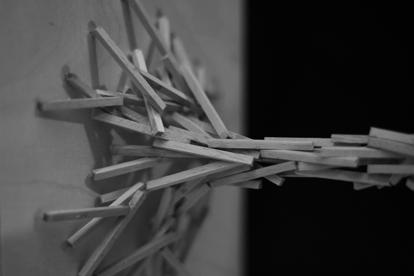
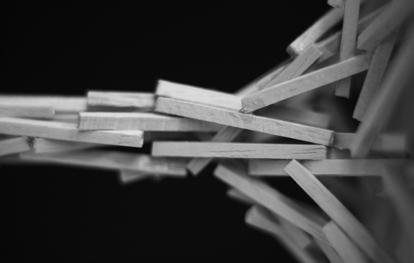
BRAIDING / wEAVING CHOREOGRAPHY RESEARCH | PROTOTYPES
BRAIDING / wEAVING CHOREOGRAPHY RESEARCH | PROTOTYPES
AERIAL ROBOT FABRICATED SPATIAL STRUCTURE | FINAL PROTOTYPE PRODUCTION SEQUENCE
AERIAL ROBOT FABRICATED SPATIAL STRUCTURE | FINAL PROTOTYPE PRODUCTION SETUP
AERIAL ROBOT FABRICATED SPATIAL STRUCTURE | FINAL PROTOTYPE PRODUCTION
Encoded Assemblies | Workshops
LOCATION: London, U.K.
TYPOLOGY: ACADEMIC RESEARCH
DATE: Spring 2017, Fall 2017
Students: Various
Tutors: Tyson Hosmer
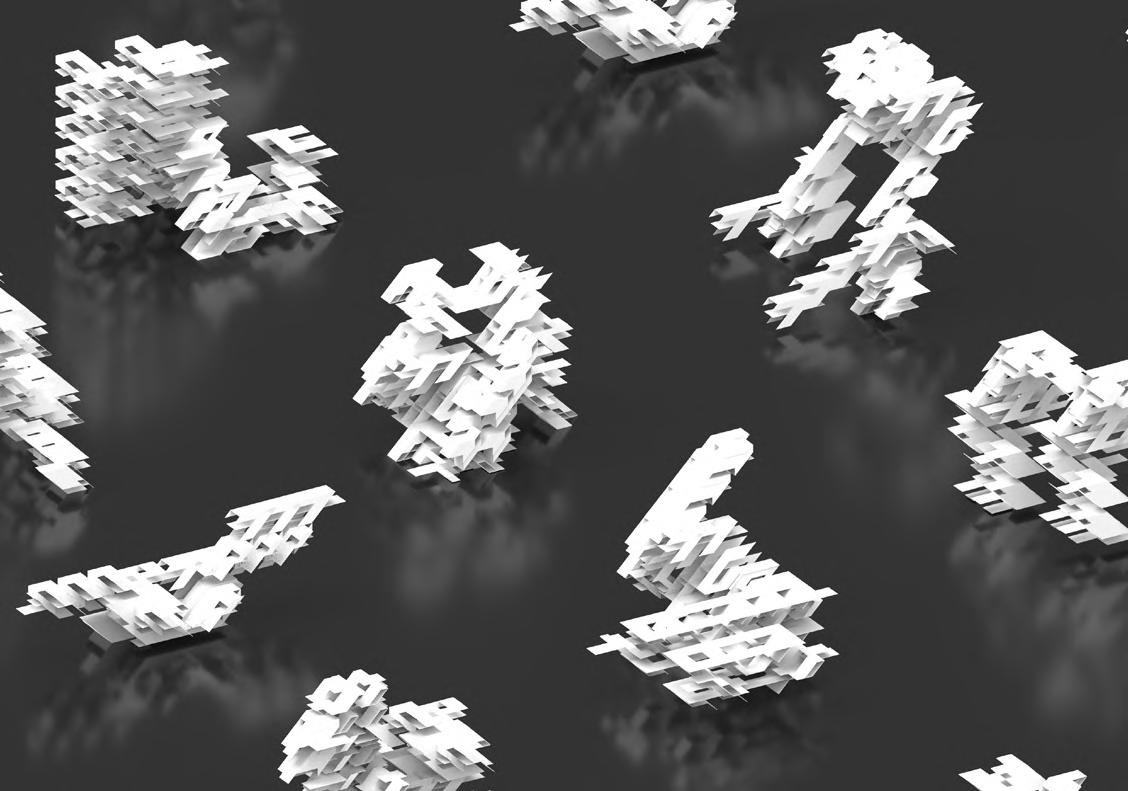
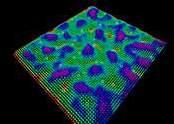
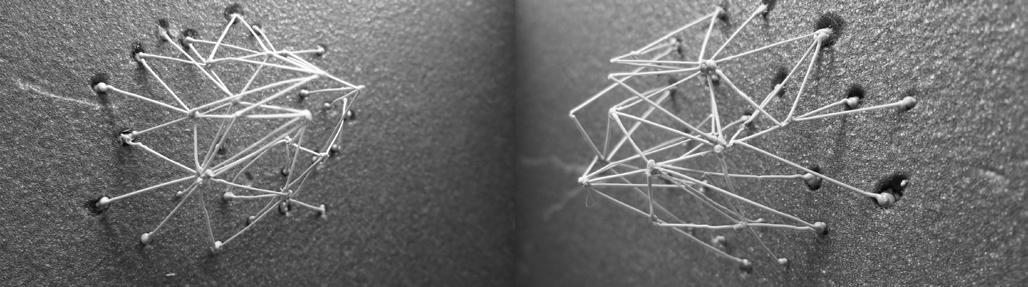
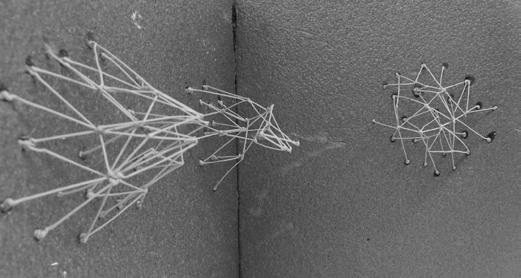
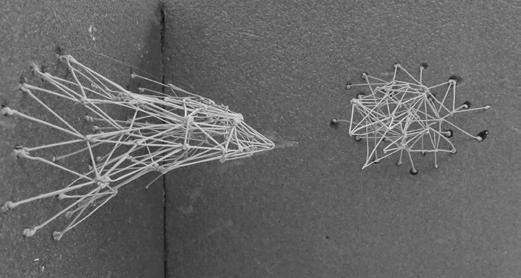
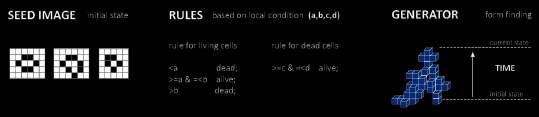
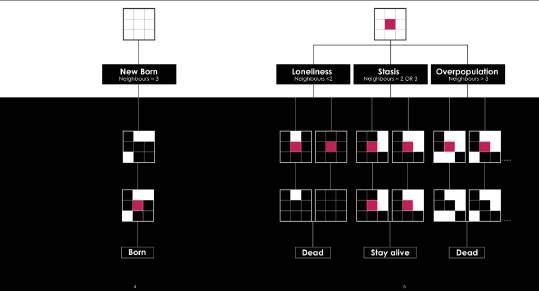
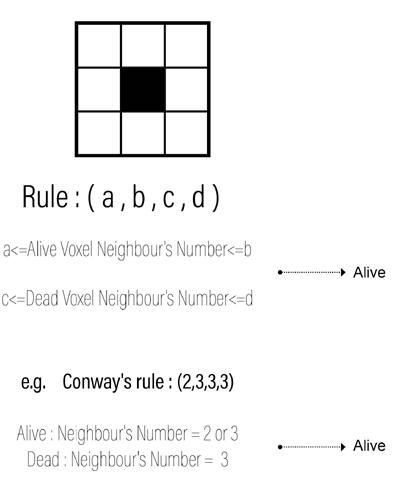
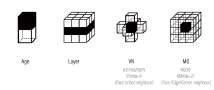
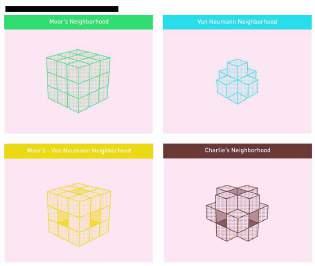
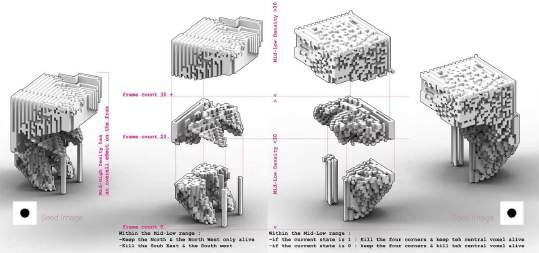
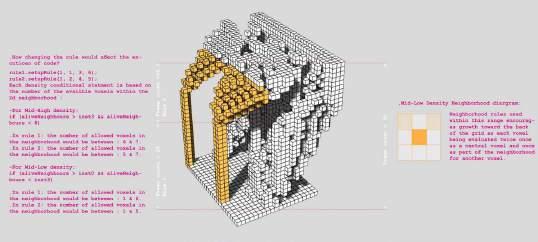
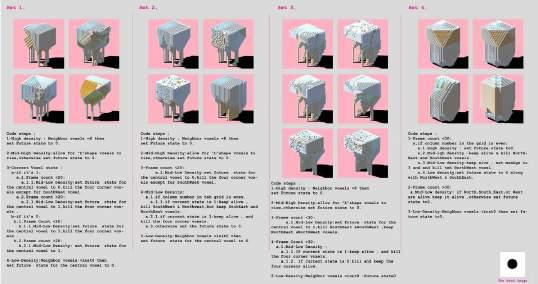
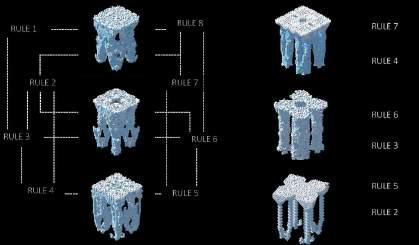
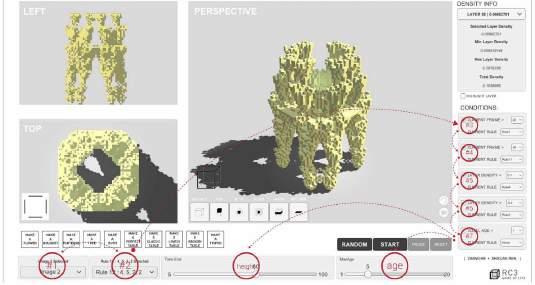
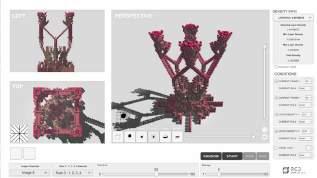
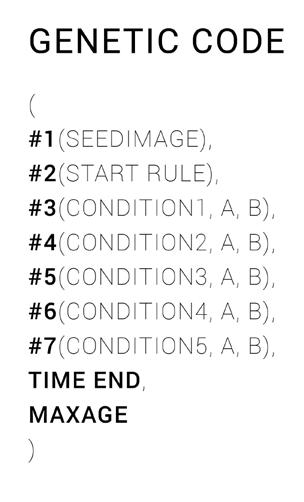
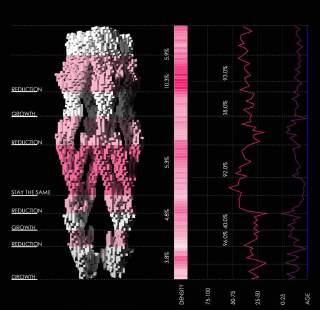
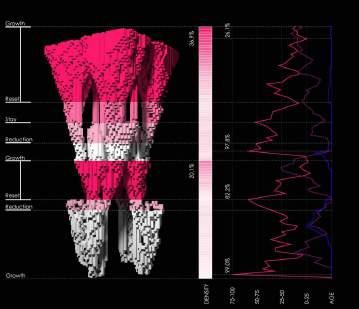
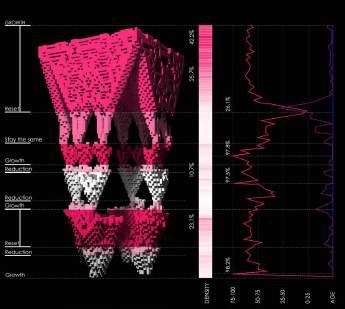
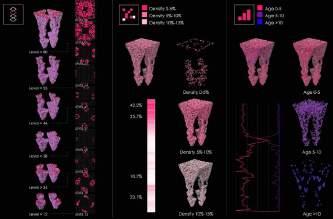
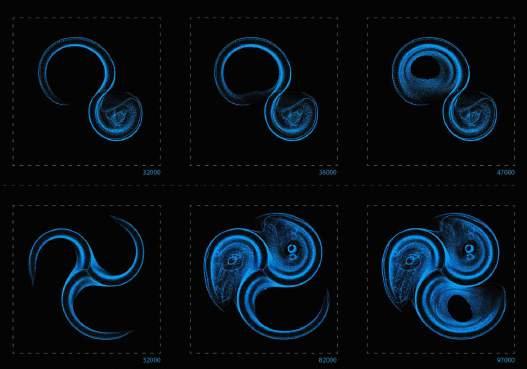
Based on this premise I built a series of research based workshops using the Game of Life and 3D Cellular Automata algorithms to develop digital and physical assemblies using agent based decision making rules applied with a local bottom up neighborhood perception. Together with students I explored flexibility and adaptability behavioural characteristics of the structures each rule set produces. We create analysis methods to identify and quantify the structural and behavioural characteristics and
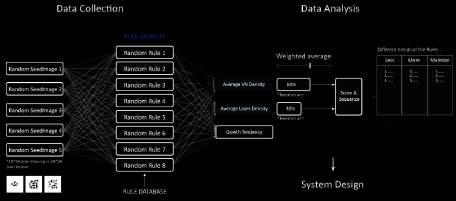
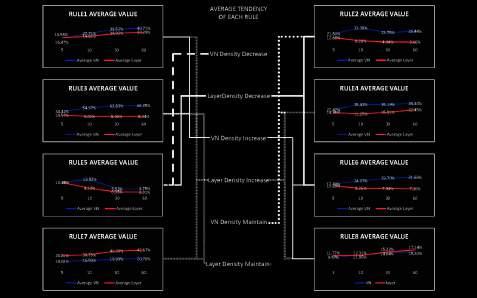
tendencies that come from different local neighborhood rules and conditions. Using probablistic machine learning techniques I researched methods for creating structures which learn to improve themselves over time using the analysis methods as a training reward mechanism.
Life is a process, which can be abstracted away from any particular medium” - Von Neumann.
GAME OF LIFE | BEHAVIOURAL PERFORMANCE ANALYSIS
Encoded Matter | Workshops
LOCATION: London, U.K.
TYPOLOGY: ACADEMIC RESEARCH
DATE: 2013-2016
Students: Various
Tutors: Tyson Hosmer + Robert Stuart Smith
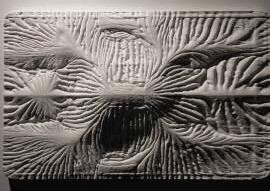
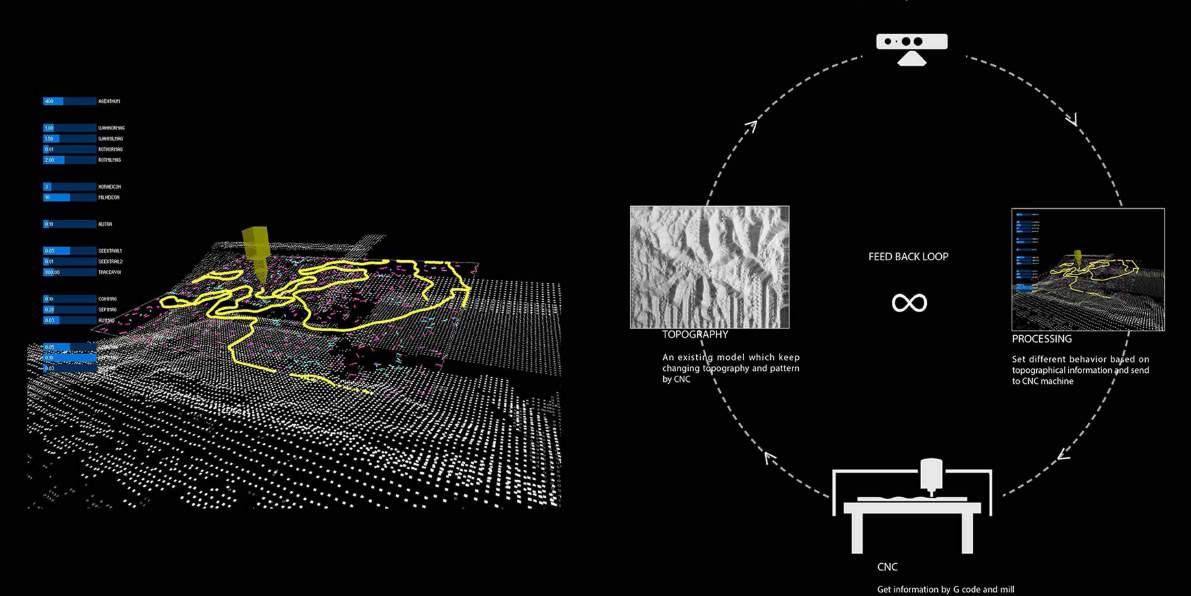
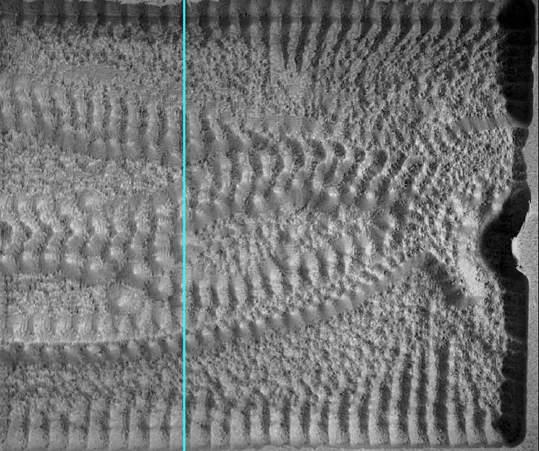
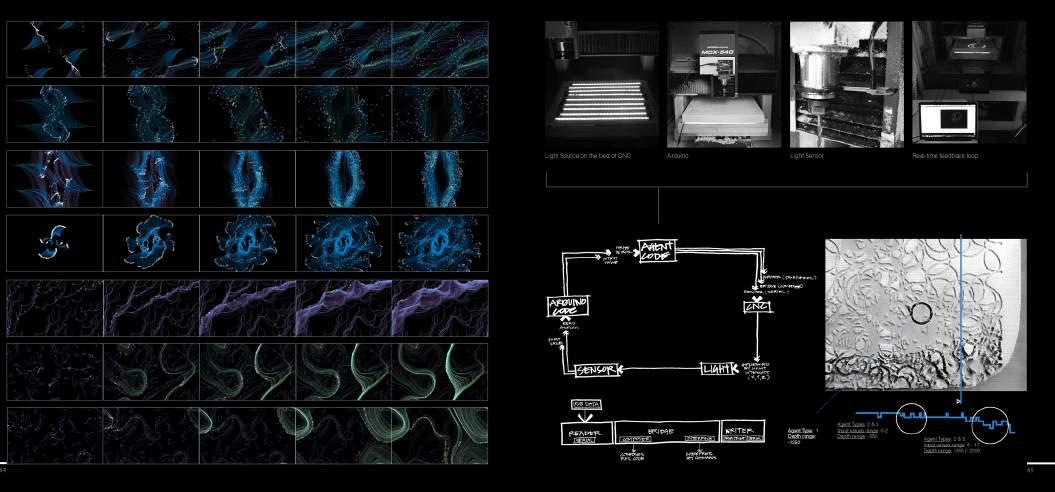
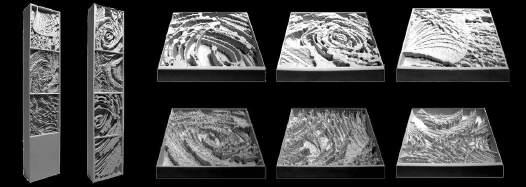
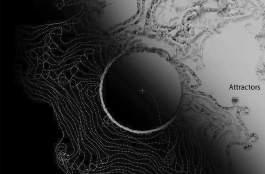
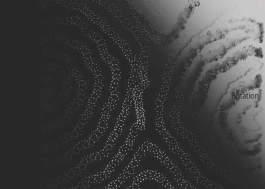
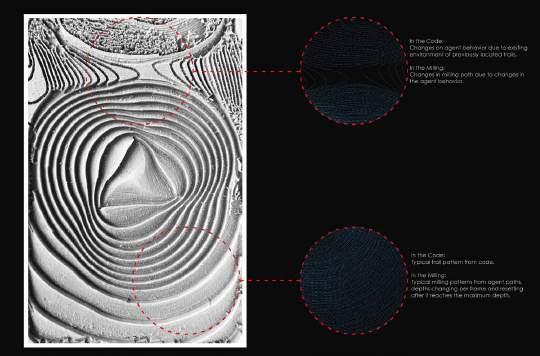
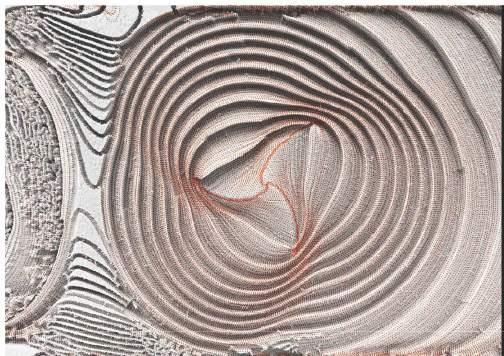
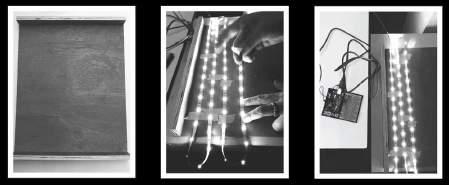
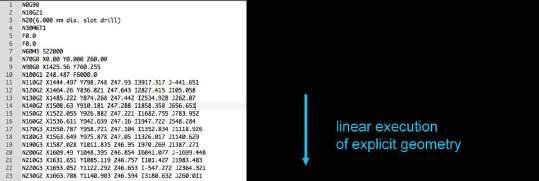
For several years I created and taught this 5 week workshop as using agent based computation tied directly to the realworld fabrication by sending machine instructions through a usb port to a cnc milling machine with sensor based feedback. Each team was given an agent based java code in which agents have local rules for directing their movements and decision making based on a local neighbor vision. As they interpret characteristics of their neighbors they make simple decisions and operate collectively forming a swarm intelligence. Each team was given tutorials in arduino with proximity, color, light and Kinect sensors which are
tied to the agent code to give direct environmental feedback which influences their local decision making. Finally, I developed a third set of code which sends machine instructions in the form of GCODE directly to the CNC milling machine bit x,y,z position and speed using the digital agent positions and characteristics to alter the resulting cutting patterns. Each team developed this feedback loop to explore emergent milled patterns generated over time as agents alter their collective behaviour through local rules over many frames.
SPECTRUM 88 SCOTT STREET
LOCATION: Toronto, Canada
TYPOLOGY: PUBLIC ART
DATE: 2017
AREA: 250 M2
ROLE: DESIGN LEADER / PROJECT MANAGER
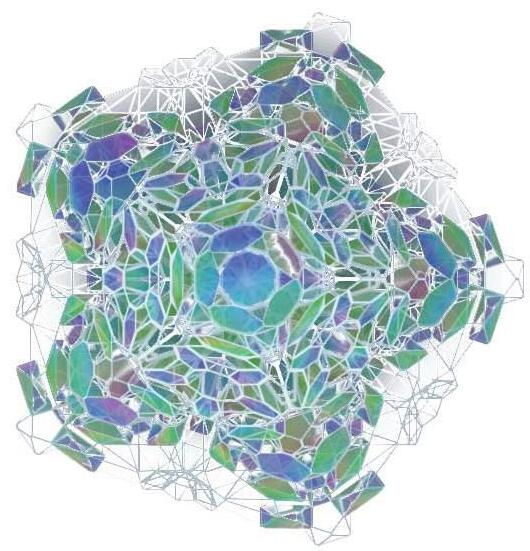
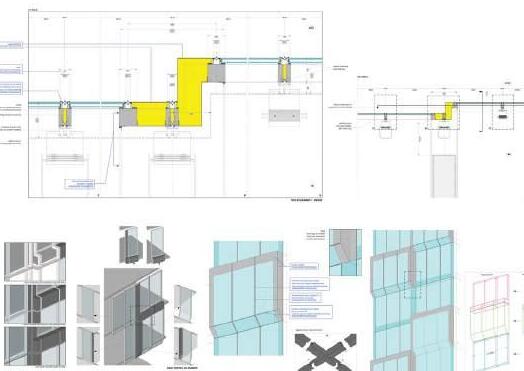
88 Scott Spectrum is a public artwork permanently hung in 88 Scott Street lobby in Toronto, Canada. The structure is organized using a 3d aperiodic fractal tiling. Numerous algorithms were written to genrate the porous tiling system. The piece is composed of 1500 polycarbonate panels and approximately 1700 polycarbonate clips assembled and hung 10 meters above the floor level. All components were developed and bespokely fabri-
cated. 50% of the panels have a dichroic film applied to certain panel types to highlight the underlying geometric patterns. Althought the structure is aperiodic and constantly changing across the field, it is composed of only 14 three dimensional volume types and 10 two dimensional panel types. Each large module is assembled and acts as an autonomous unified structure. The piece was completed successfully in 2017.
88 SCOTT ATRIUM | SPECTRUM TILING SYSTEM
3D APERIODIC TILING | FRACTAL SYSTEM
+ DICHROIC FILM
DICHROIC FILM | DISTRIBUTION
DICHROIC FILM | LIGHT STUDIES
CLIP TYPES | SHOP DRAWINGS
ASSEMBLY + FABRICATION | SHOP DRAWINGS
QXQ QUARTZ HOUSING
LOCATION: London, U.K.
TYPOLOGY: PREFABRICATED HOUSING SYSTEM
DATE: 2014
AREA:
ROLE: DESIGN LEADER / PROJECT MANAGER
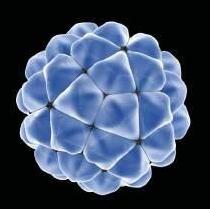
QXQ is a prefabricated system for building a range of housing typologies quickly with little infrastructure. It is not a singular architecture, it is a flexible building product that can produce a large range of architectural products. The geometry of QXQ is based off of Quartz crystal growth.
The basic spacial unit is a rhombic dodecahedron which can build both vertically and horizontally along oblique angles. The spatial unit is broken down into a highly versatile panel system which can be prefabricated, flat packed in a container and erected with limited infrastructure. The product is targeted at a high end market, and is potentially capable of fitting a low cost relief housing application. The client has commissioned a fully functional 1:1 prototype to be produced this year.
SIGMA CODE RESEARCH
LOCATION: London, U.K.
TYPOLOGY: ALGORITHMIC RESEARCH
DATE: 20114-2016
AREA:
ROLE: RESEARCH DIRECTOR
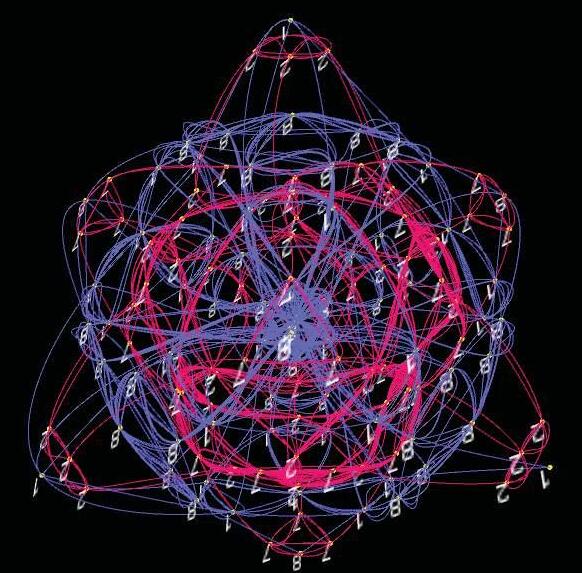
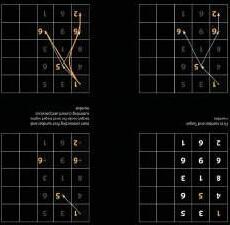
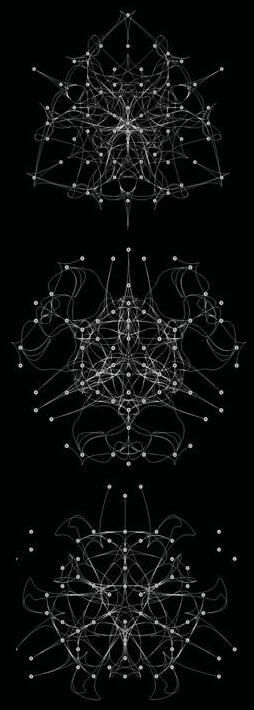
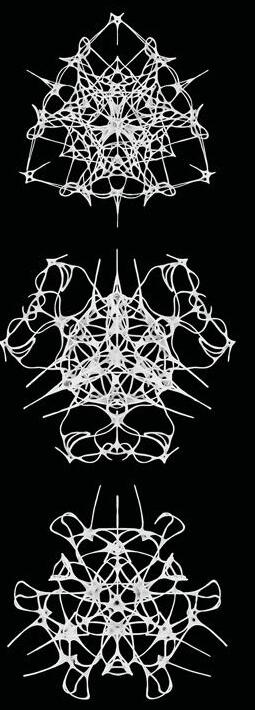
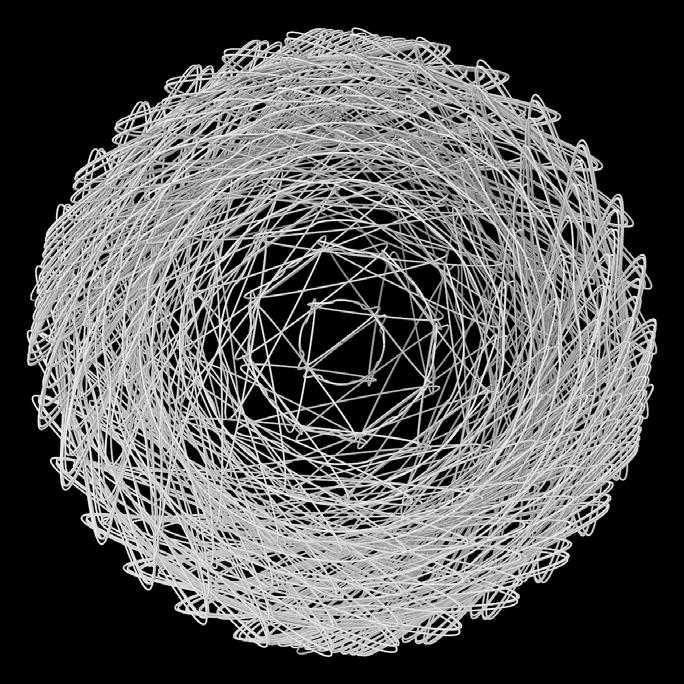
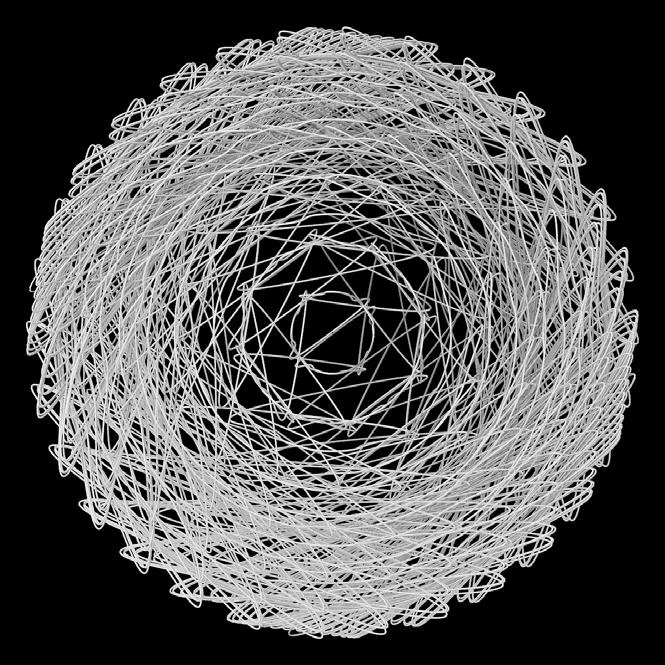
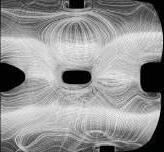
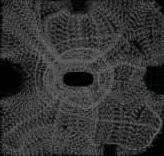
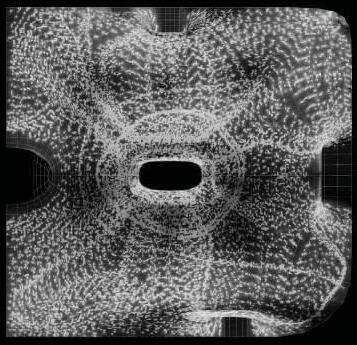
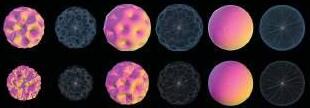
The sigma code is an abstract machine that acts as a filter to find organizational patterns in number sets. Sigma Code is a simple algorithm whereby the characters of any number are continuously summed until reaching a number between 1-9. The body of research looks at organizations of number sets in space and applies algorithms to interpret the data and discover geometrical patterns that lie within it. We have created an abstract generative machine which treats
number sets spatially as environments. It unveils the order within the number systems and generates complex formal organisations. Mathematical environments are coupled with coordinate systems to generate charged geometric environments in whcih search algorithms are used to interpret the data. Along with 100s of thousands of forms, we are currently applying this machine to generate architectural form and structure.
GROSVENOR HOTEL SCULPTURE
LOCATION: London, U.K.
TYPOLOGY: PUBLIC ART
DATE: 2016
AREA:
ROLE: PROJECT ARCHITECT
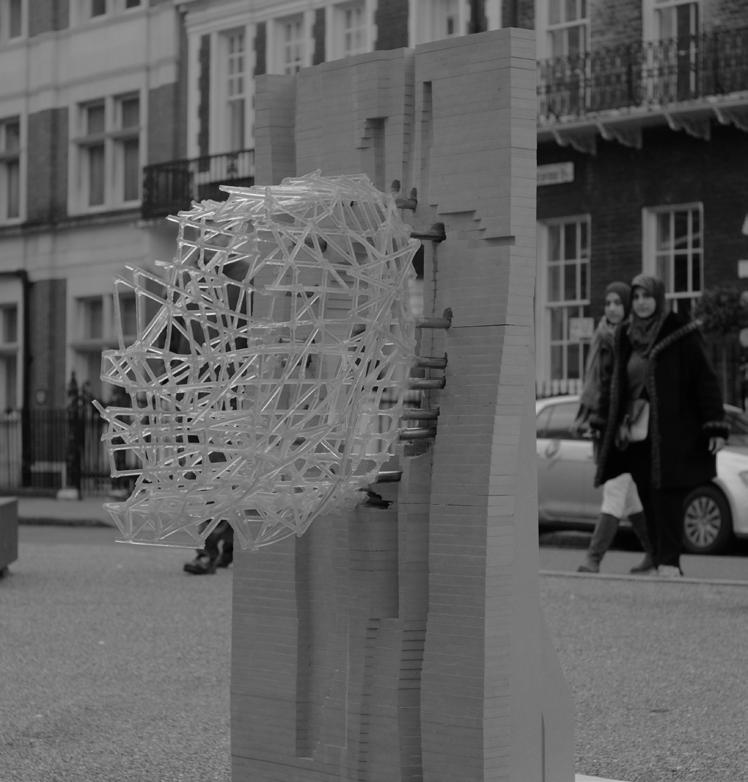
The Sigma code research was applied to a public art piece in London for the new Grosvenor Hotel. The sculpture sits in the courtyard of the hotel providing both a visual screen across to other bedrooms as well as central icon for the hotel. The piece is to be formed in painted steel pipes and flat plates using cnc tube bending technology.
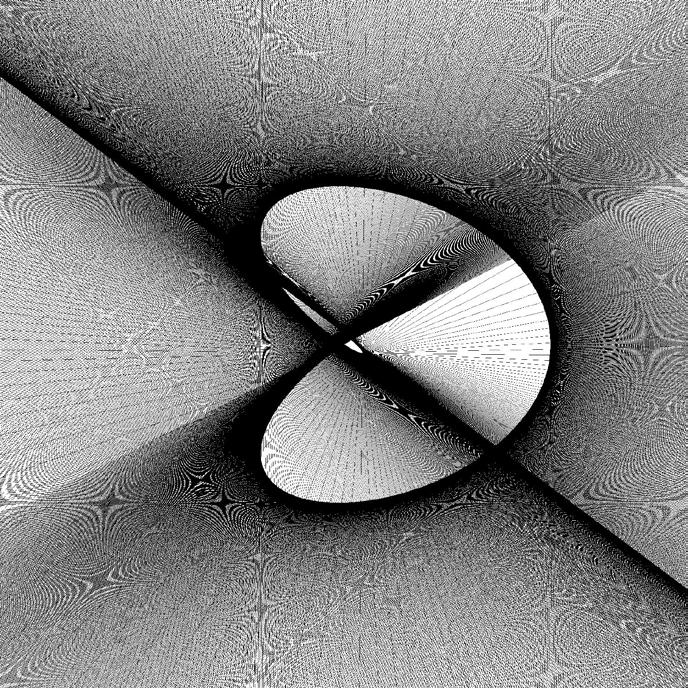
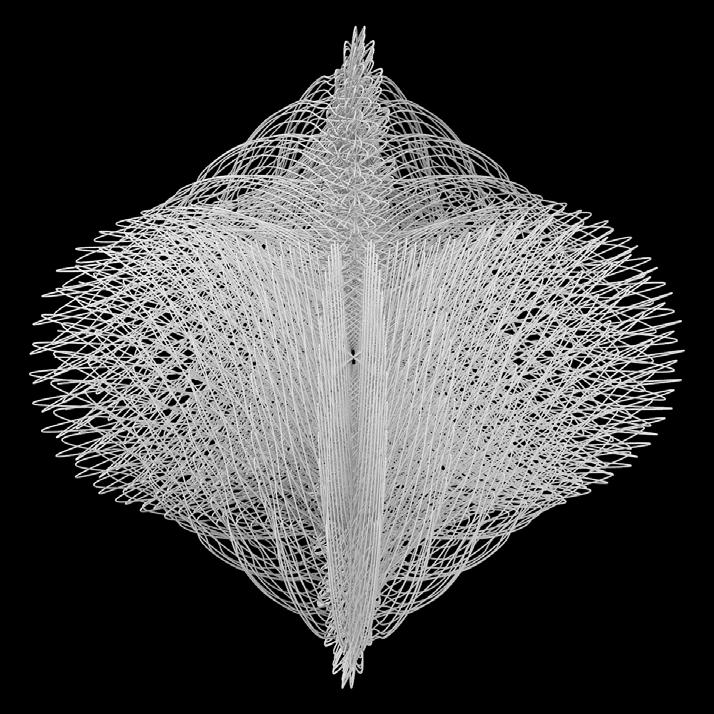
PARAMETRIC CURVES RESEARCH
LOCATION: London, U.K.
TYPOLOGY: GEOMETRY RESEARCH
DATE: 2015
AREA:
ROLE: RESEARCH DIRECTOR
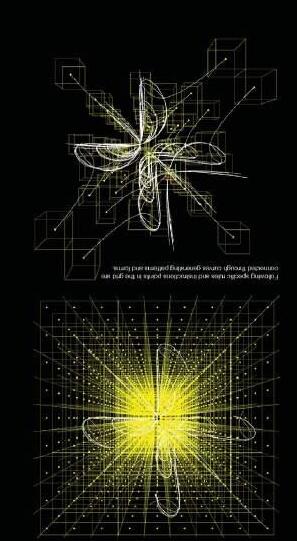
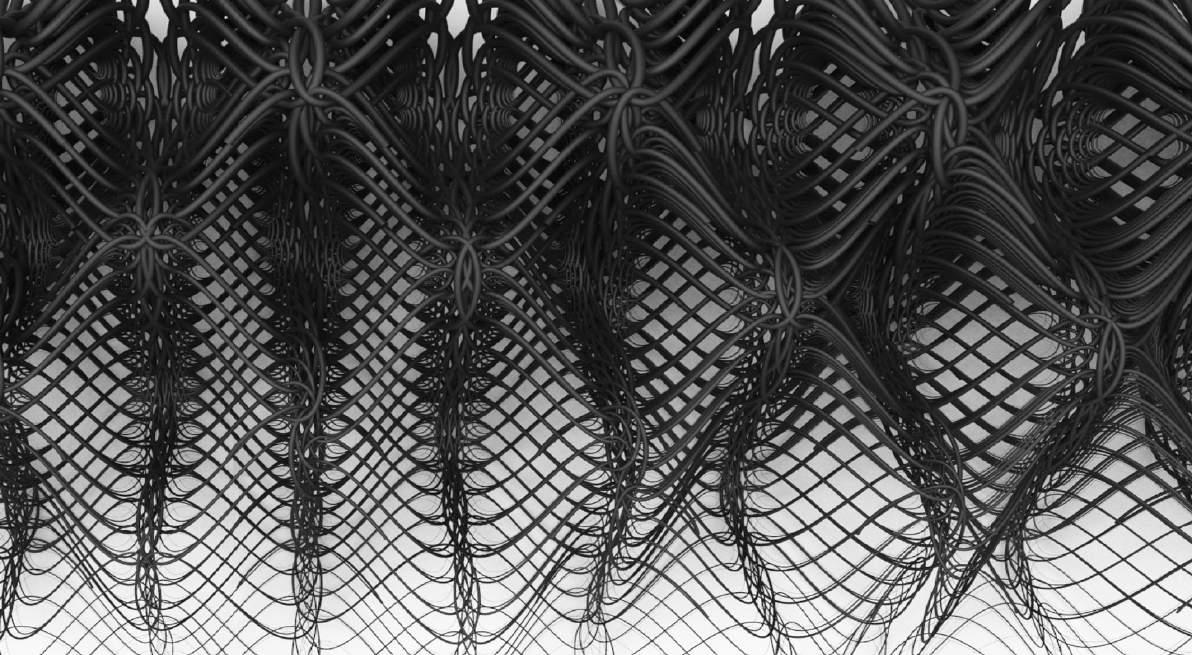
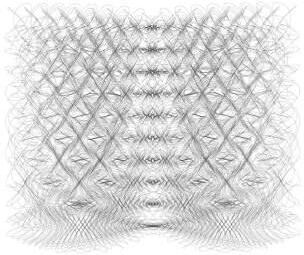
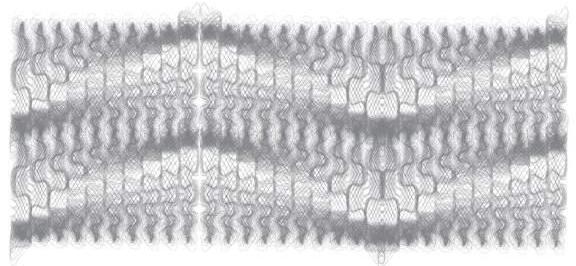
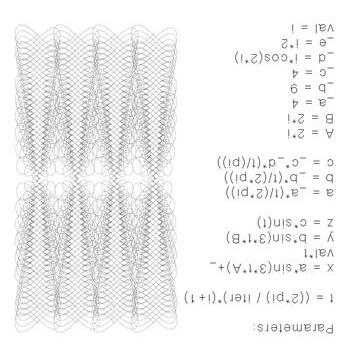
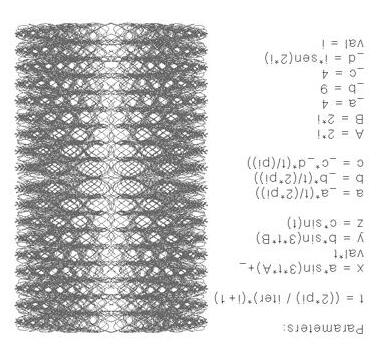
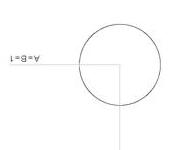
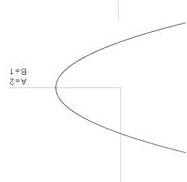
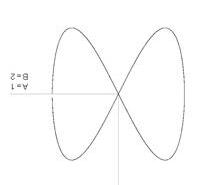
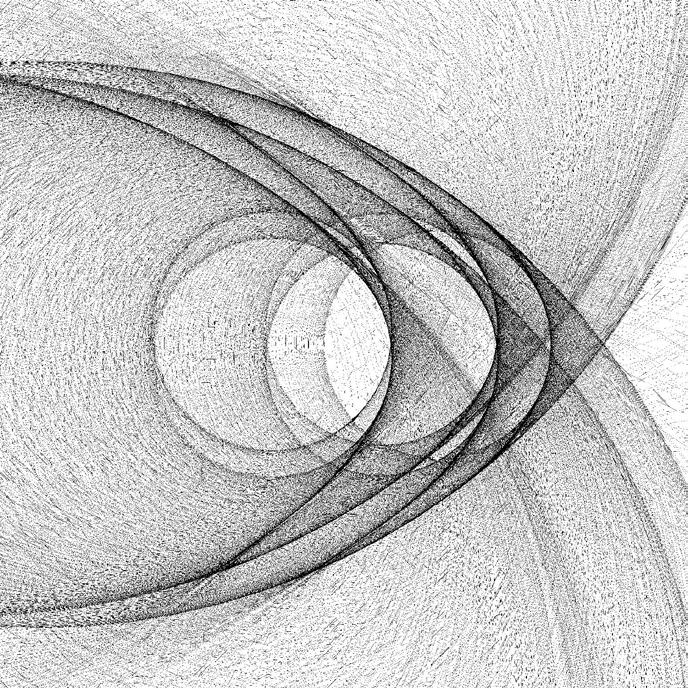
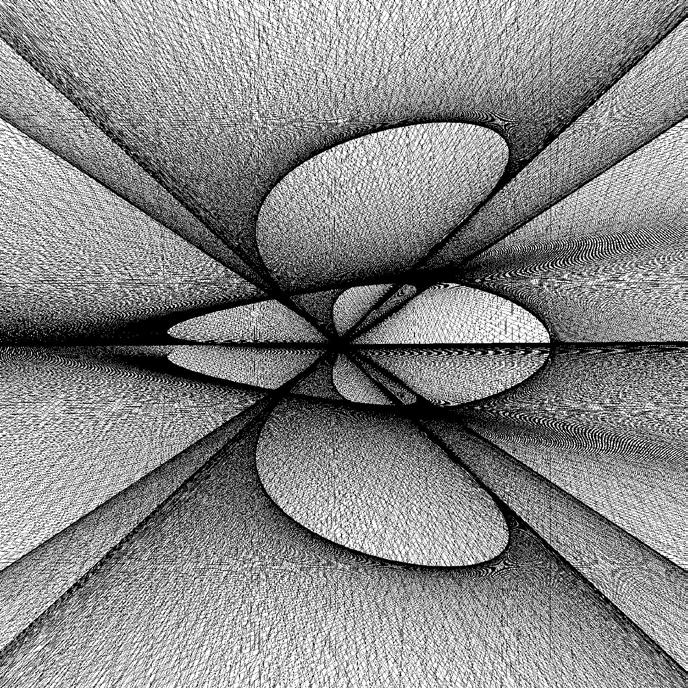
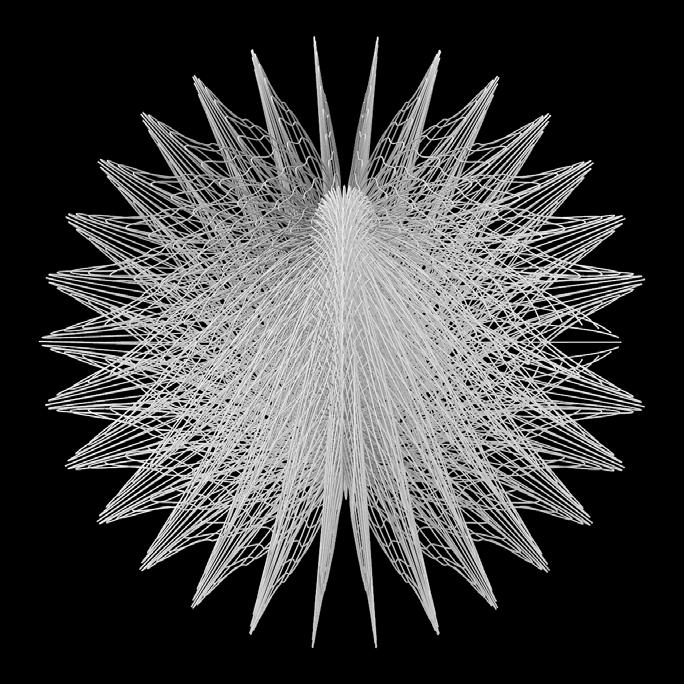
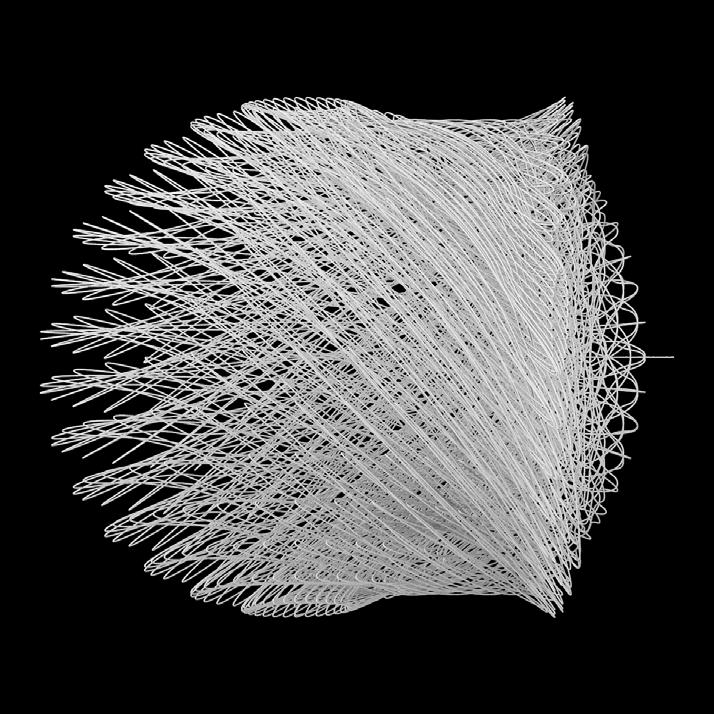
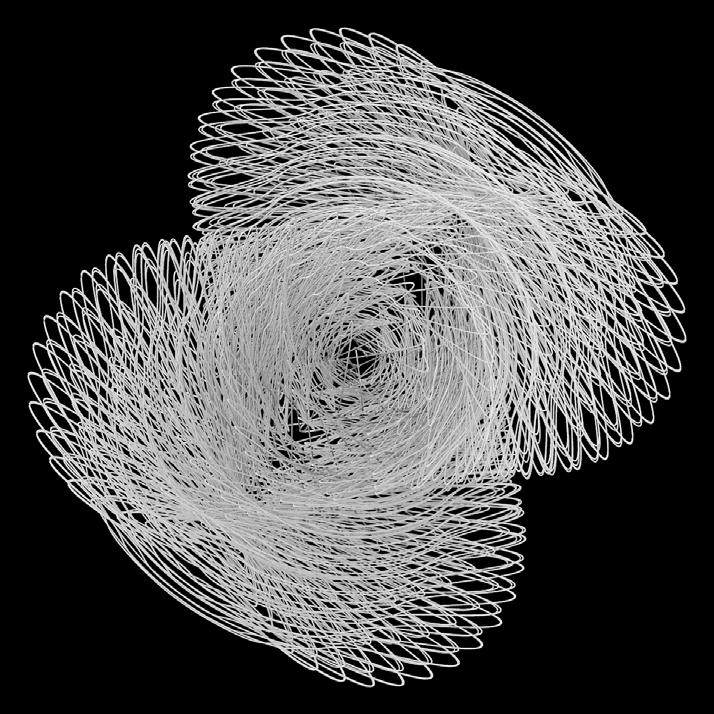
Research investigating the parametric control and generation of complex systems of spline curve geometries using trigonometric functions. The research began by investigating the basic parametric functions for generating a unit circle. Three trigonometric functions are applied across a domain to plot the cartesian coordinates of the circle. Using these equations to translate between the local
coordinate systems of the curves and the cartesian coordinate systems we gain increasing control over amplitude and frequency of the wave sets. The studies begin as a series of individual curves and expanded to control over curve fields. This research was applied to several projects including the Star of Caledonia landmark.
3D SPLINE CURVE | EXAMPLES
3D SPLINE CANOPY | EXAMPLE
3D SPLINE FIELDS | EXAMPLES
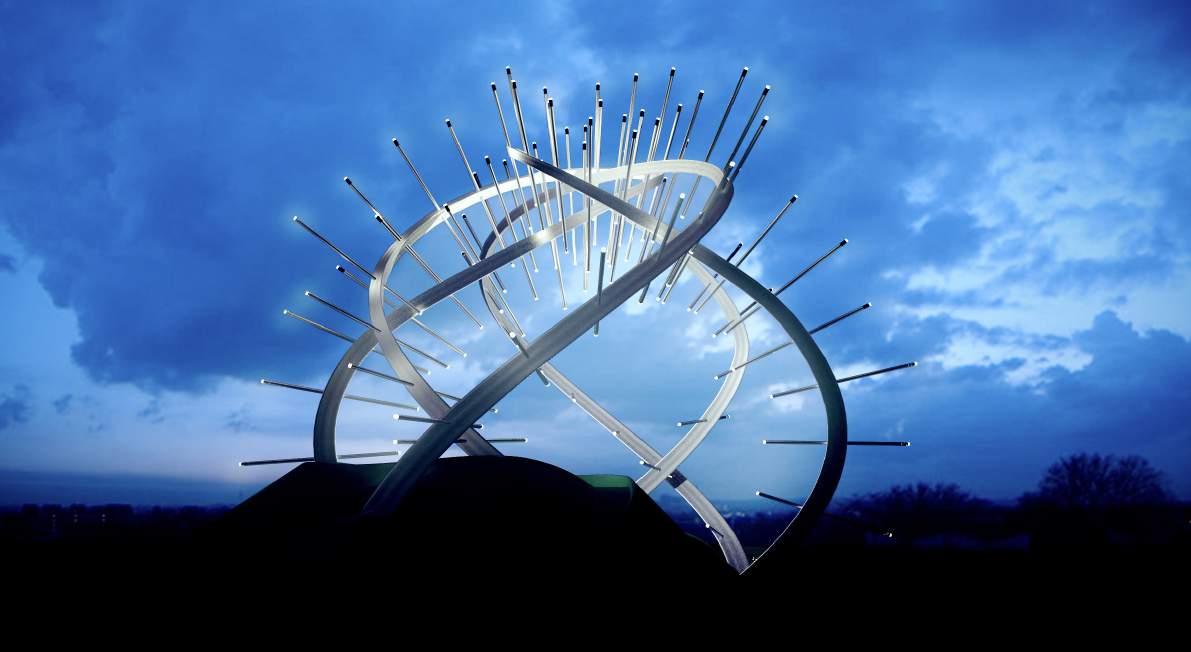
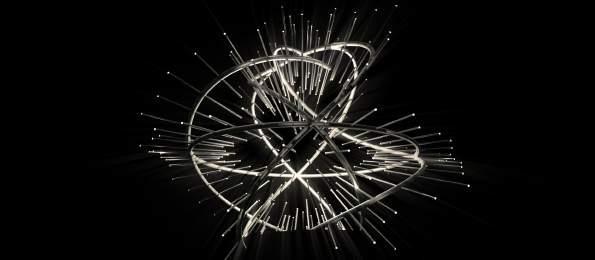
STAR OF CALEDONIA
LOCATION: Gretna, Scotland
TYPOLOGY: LANDMARK
DATE: 2015
AREA: 35M RADIUS
ROLE: RESEARCH DIRECTOR
Parametric curve research was applied to the design of a landmark scultpure in Gretna, Scotland. The stainless steel sculpture is approximately 35 m in radius. The landscape is organised by a series of curving landforms leading to a geometric centroid of the Star. It is constructed as a triangular monocoque structure with welded steel ribs and 10mm steel plate. The geometry of the landmark is produced by a single self interesting curve which provides inherent structural integrity through its symmetry and intersection junctions. A series of steel tubes with LEDs pass through the primary triangular section and are all oriented to a hidden centroid of the overall geometry. This provides the observer with a self referencial experience upon reaching the top of the landforms as all the LEDs point to him. The project has passed planning permission and detail design and awaits additional funding before being constructed.
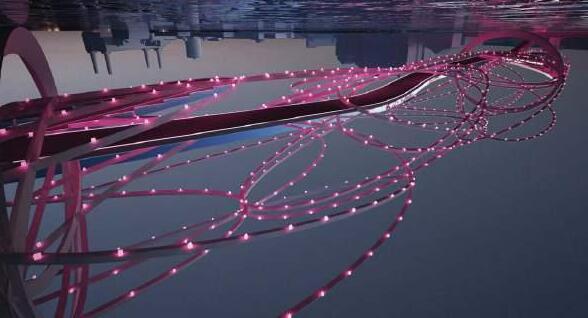
NINE ELMS BRIDGE
LOCATION: London, U.K.
TYPOLOGY: PEDESTRIAN AND CYCLE BRIDGE
DATE: 2015
AREA: 200 M
ROLE: LEAD DESIGNER
Parametric curves research was applied to a competition for a pedestrian and cycling bridge in London, U.K. The bridge structural design was composed of 2 parametric curve geometries with several naturally occuring intersections which provided necessary stiffness. The looping curves were supported on two large structural rings. A series of LEDs dot the curves and light up the Thames River at night. The cycling and pedestrian paths meander through the looping steel sections connecting a large public amphitheater at either end providing an opportunity for public events and social space above the river. In perspective the bridge structure looks highly complex, while in plan and section the curves can be seen as highly ordered loops.
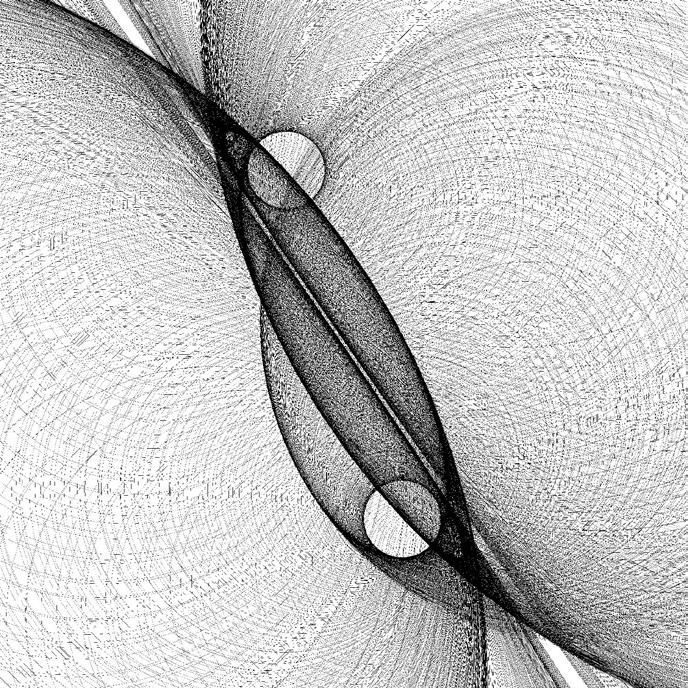
PARAMETRIC SURFACE RESEARCH
LOCATION: London, U.K.
TYPOLOGY: GEOMETRY RESEARCH
DATE: 2015
AREA:
ROLE: RESEARCH DIRECTOR
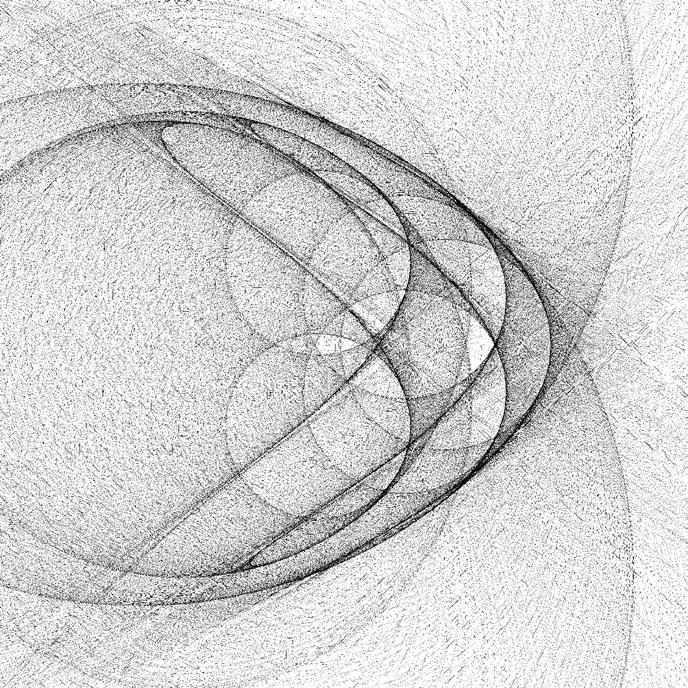
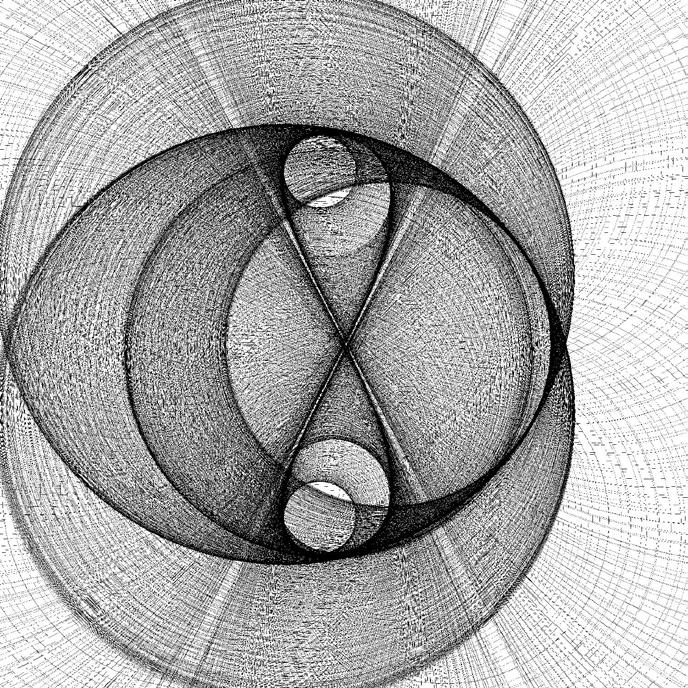
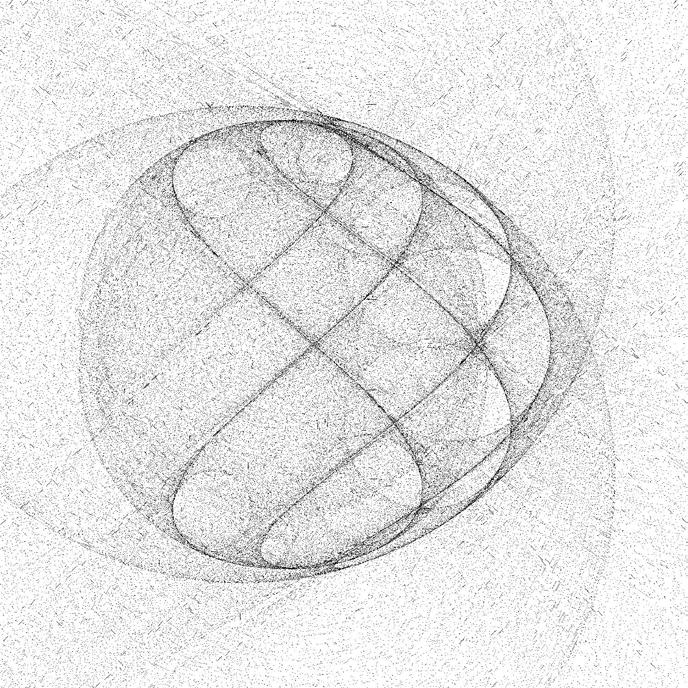
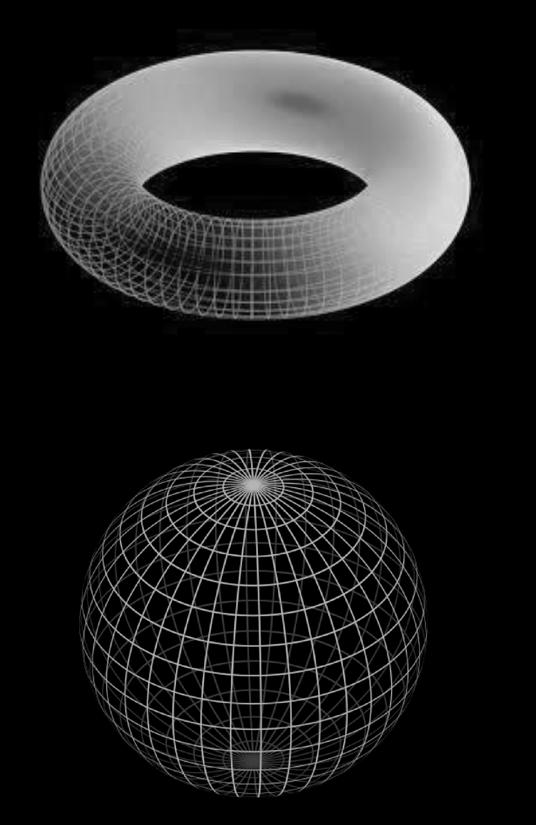
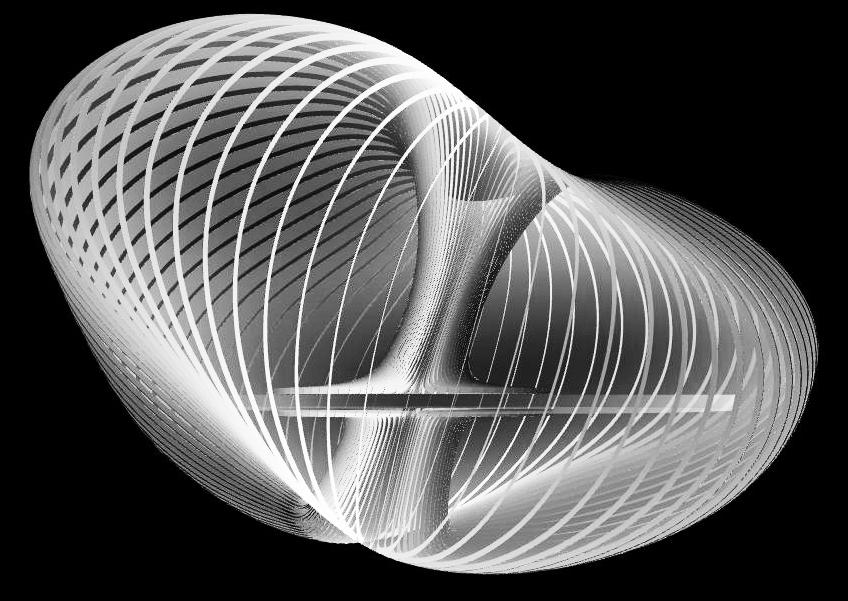
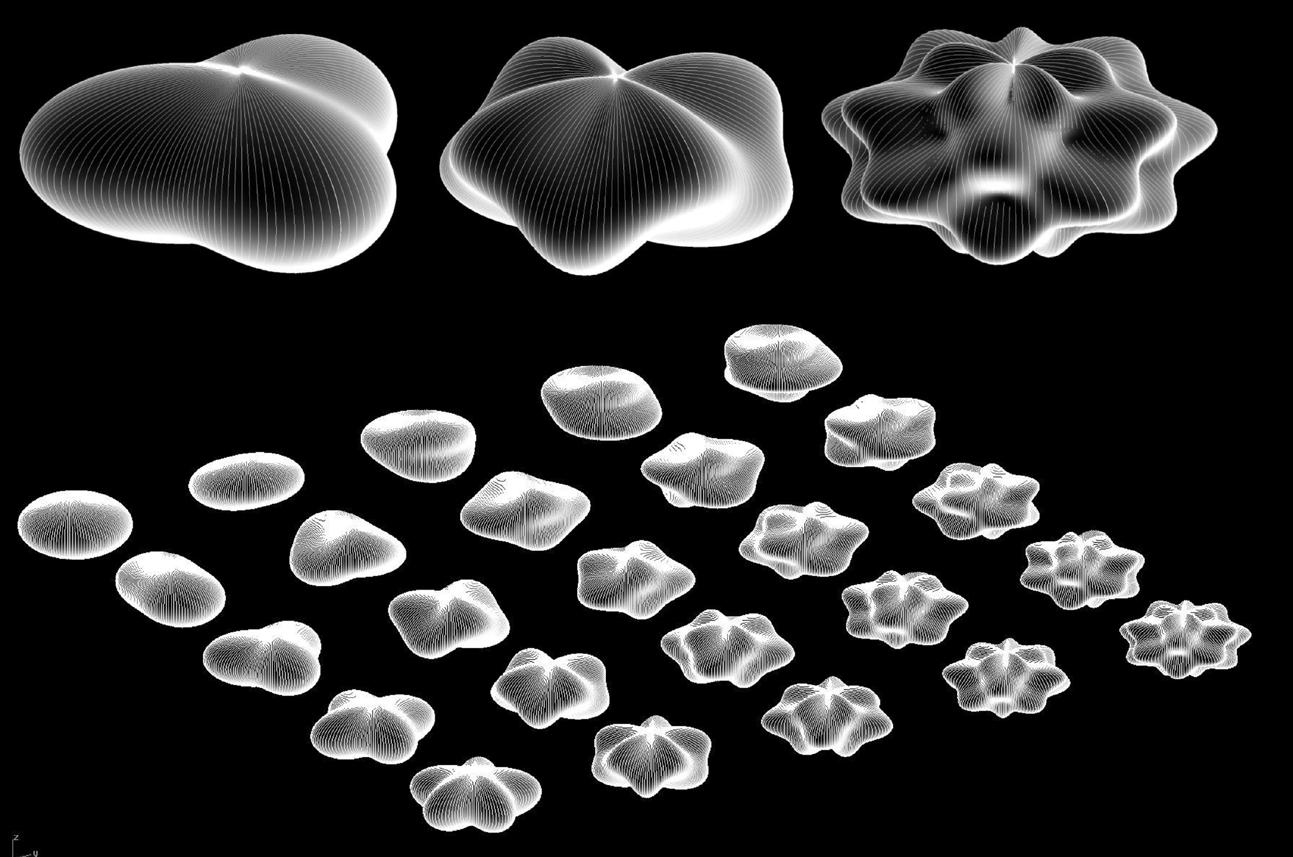
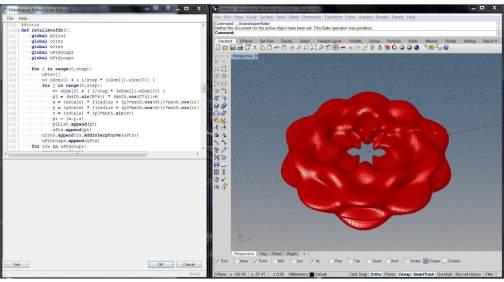
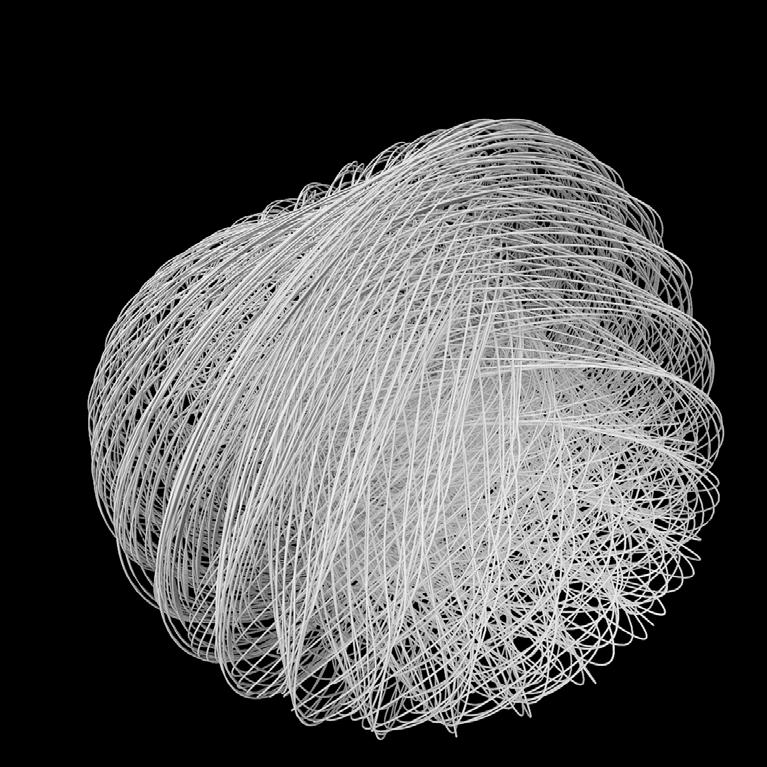
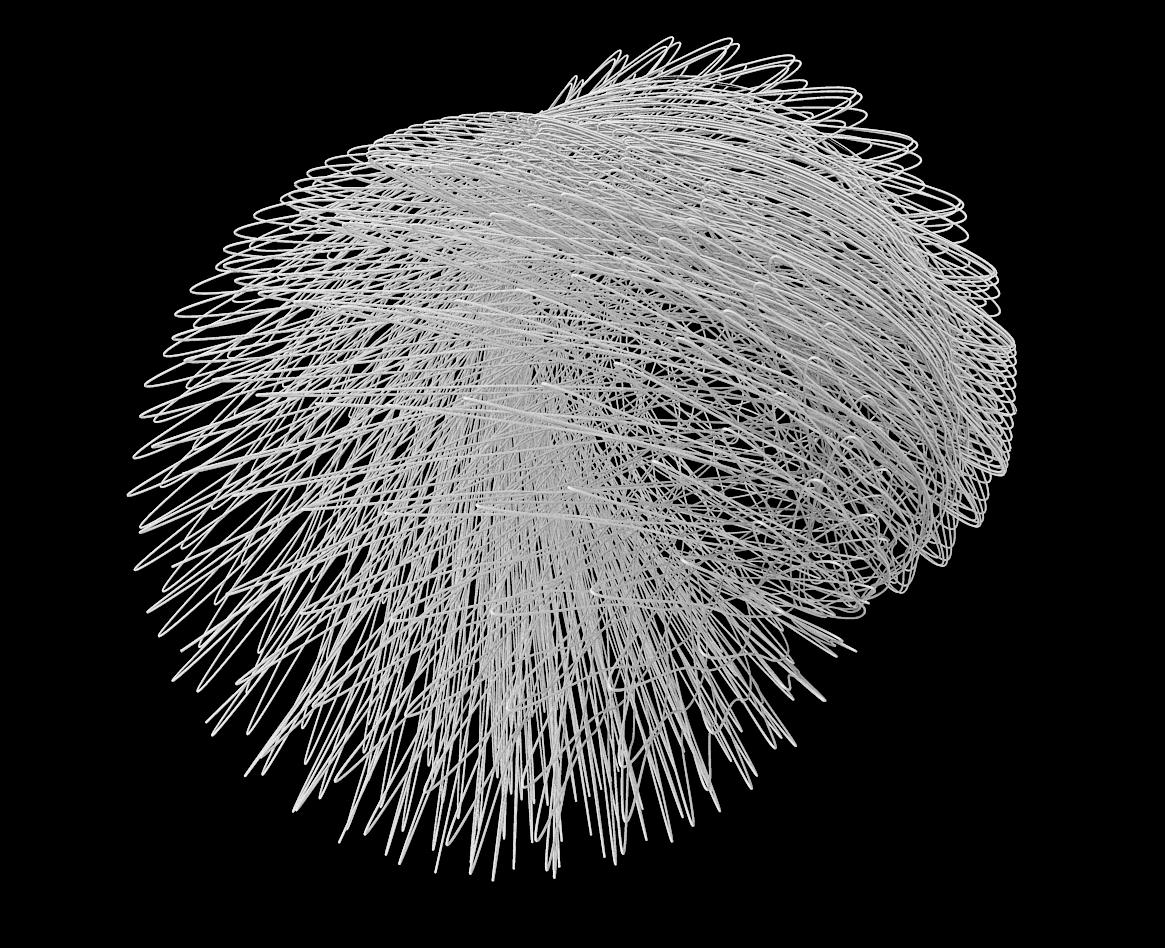
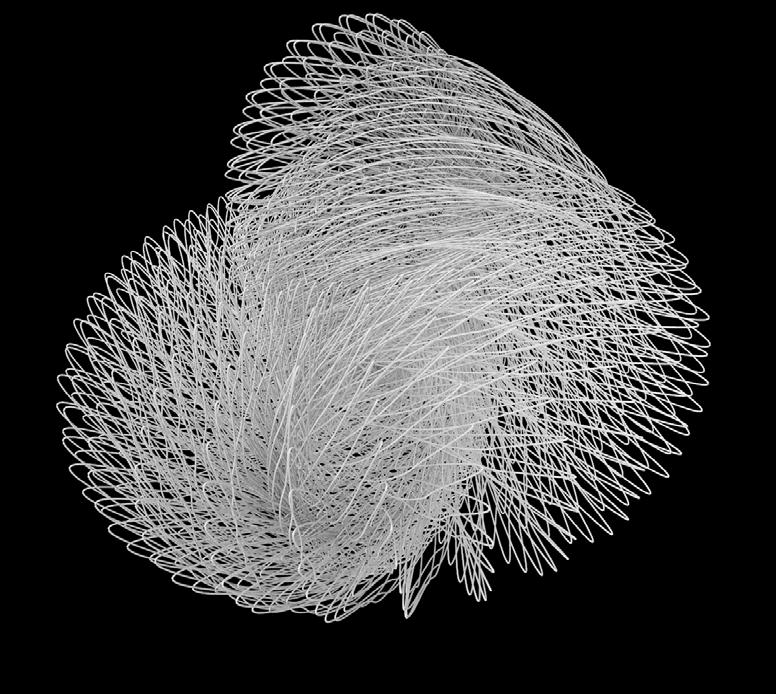
Research investigating the parametric control and generation of complex systems of surface geometries using trigonometric functions. The research began by investigating the basic parametric functions for generating a unit sphere and torus. Three trigonometric functions are applied across a U,V surface domain to plot the cartesian coordinates of the sphere and torus. Using these
equations to translate between the local coordinate systems of the surfaces and the cartesian coordinate systems we gain increasing control over amplitude and frequency of the wave sets. We are able to work within the geometry of the surfaces, rotate and shift the points and develop form from within. This research was applied to several projects including the Syracuse Pavilion.
PARAMETRIC SURFACES TORUS GRASSHOPPER
PARAMETRIC SURFACES TORUS + SPHERICAL COORDINATES
4D SURFACES | ROTATING HYPERTORUS
UKRAINA HOTEL ENTRANCE
LOCATION: London, U.K.
TYPOLOGY: HOTEL ENTRANCE CANOPY
DATE: 2014
AREA:
ROLE: LEAD DESIGNER
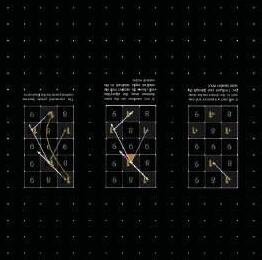
Beginning with a simple local ruleset, a line moves through space shifting direction in response to a sequence of numbers and proportions tuned to the existing building. Taken further, this line was treated as a volume of 3x3 cubes. The same rule system was applied to the cubes to generate a ‘second line’ traveling around
the first. This multi-scalar device was used to generate the overall form of the canopy as well as a two part material system. At night the transparent elements are lit up with internal LEDs.
WATERFRONT RETAIL ENVIRONMENT
LOCATION: Colombo, Sri Lanka
TYPOLOGY: RETAIL / F & B
DATE: 2013
AREA: 25,000 M2
ROLE: DESIGN LEADER
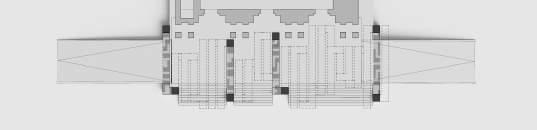
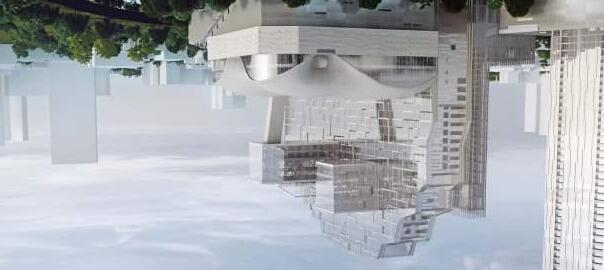
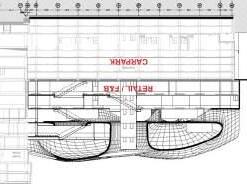
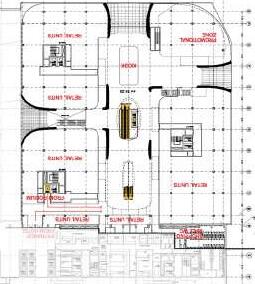
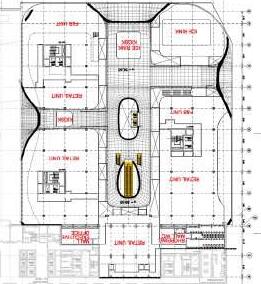
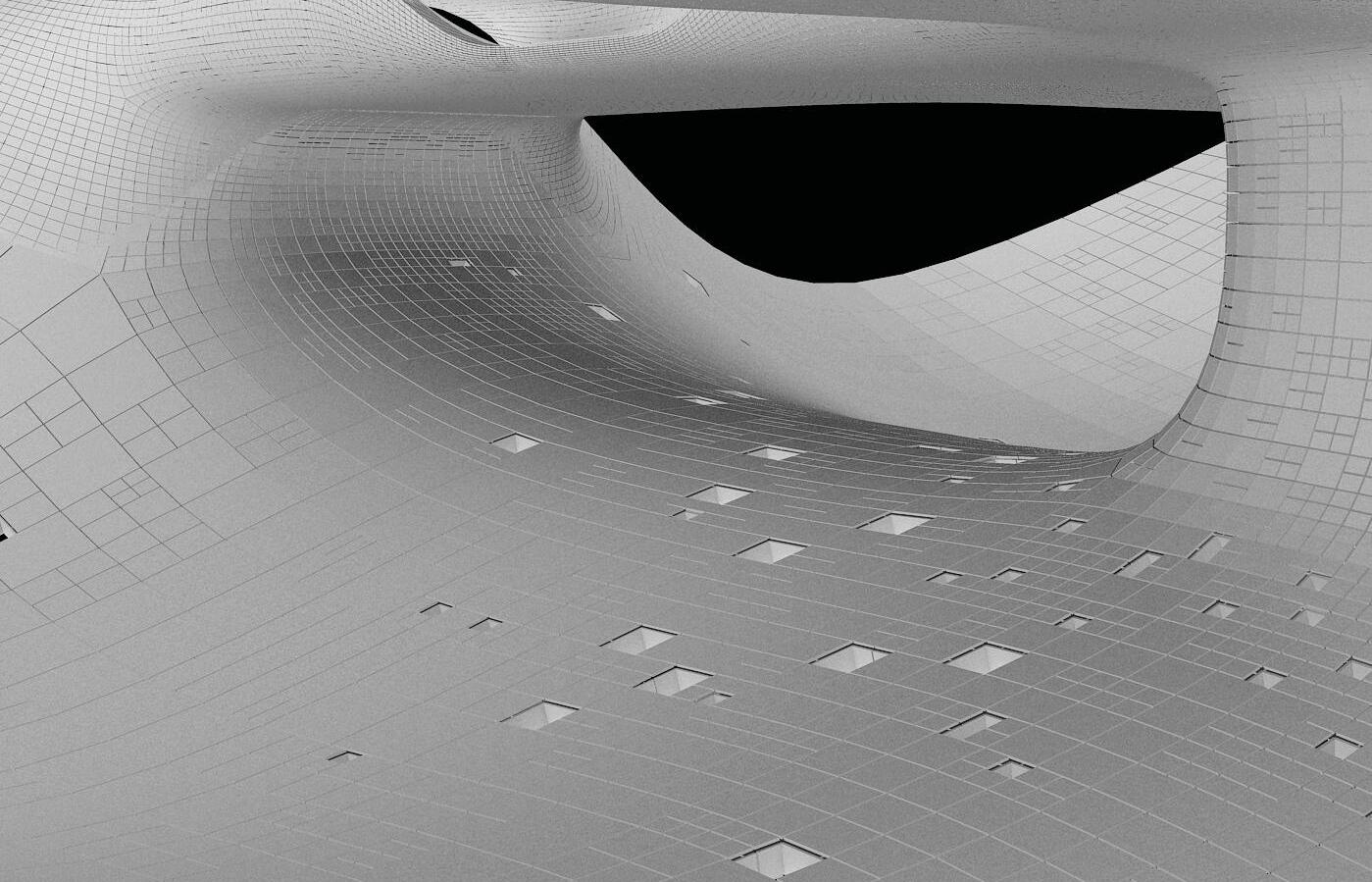
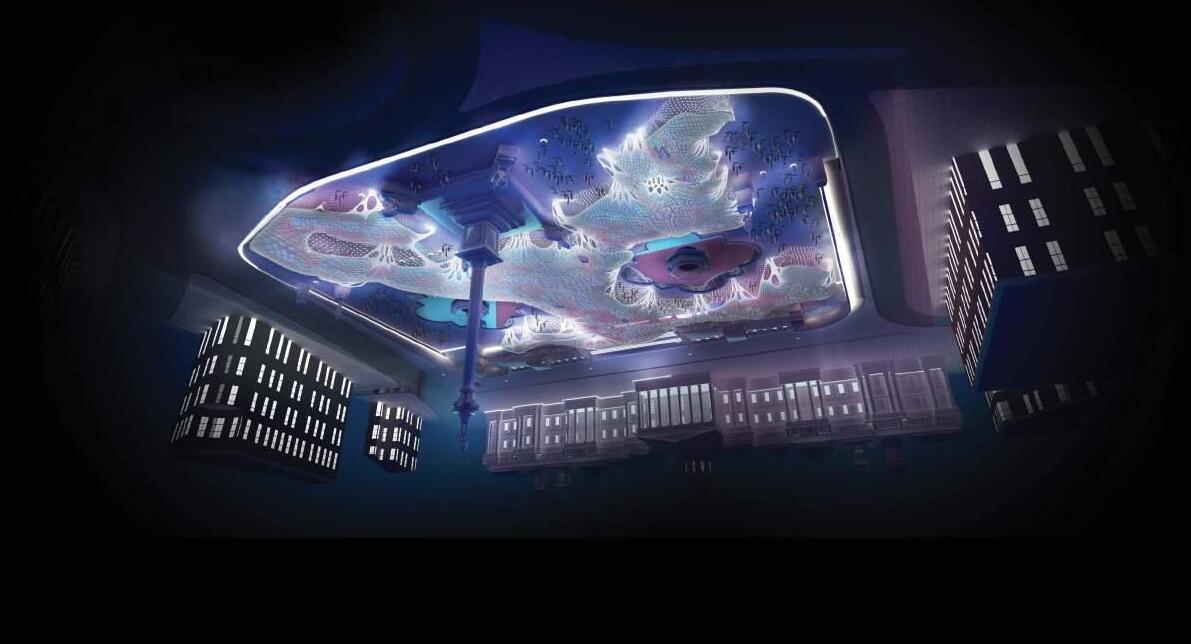
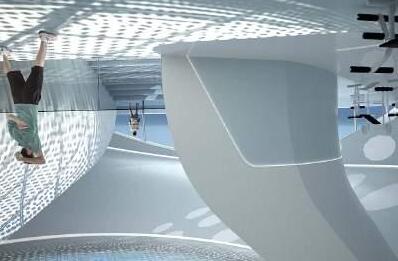
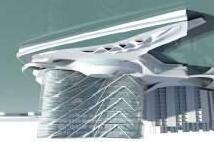
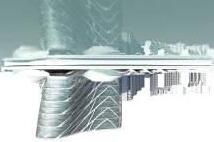
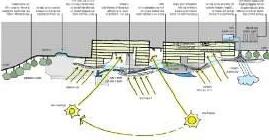
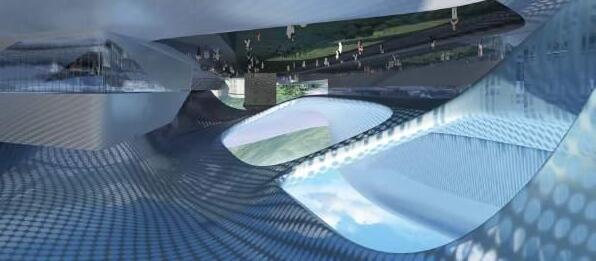
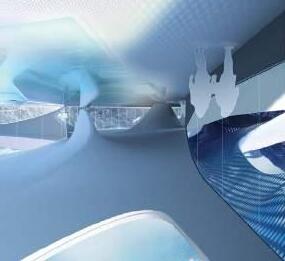
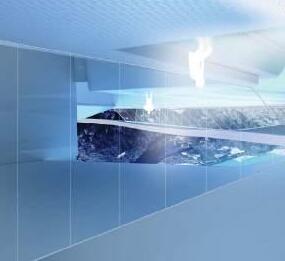
The retail environment sits within a 450,000 M2 mixed use development under construction in Colombo, Sri Lanka. It is a continuous manifold that adapts to provide a one of a kind shopping and entertainment space within. The skin closes to provide shading from the hot climate of Sri Lanka and shelter from monsoon rains while opening up to provide a stunning elevated views of the surrounding landscapes. The form of the roof shell generates a rigorous infrastructure for pedestrian circulation within, and exterior terraces for al fresco dining. As people ascend up to level 31m, they are met with an extraordinairy retail environment with a large central rooflight to the sky pulling natural light through three levels of entertainment. The continuously
moving surface provides an experience that leads shoppers to explore the various levels of retail, entertainment, and dining within. From the surrounding landscape, the shell is an iconic destination for Sri Lanka’s residents to come to shop. We have identified monocoque construction as a fast and structurally efficient solution to build the shell. The construction technique utilises the external skin to support the structural load. This is as opposed to using an internal frame or chassis that is then covered with cosmetic body panels. This provides the opportunity for a closed structure capable of supporting its own large spans as well as the movements of people within the retail environment.
RETAIL
ALGORITHM RUN AGENTS
ALGORITHM STRESS LINE DENSITY
ALGORITHM BASE GEOMETRY
WATERFRONT HOTEL FACADES
LOCATION: Colombo, Sri Lanka
TYPOLOGY: 900 BED HOTEL FACADES
DATE: 2012-2015
AREA: 25,000 M2
ROLE: DESIGN LEADER
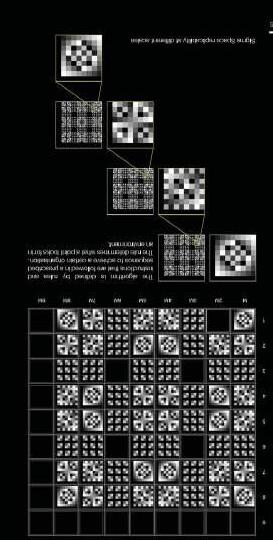
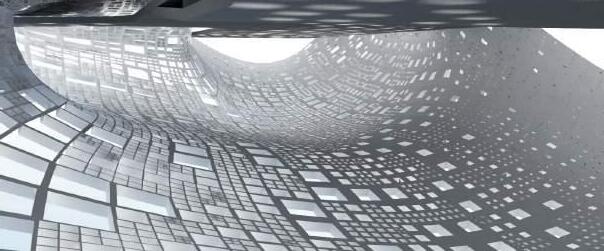
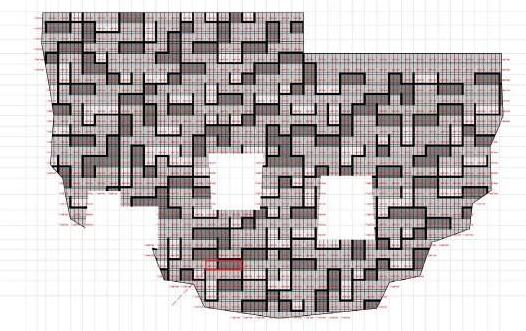
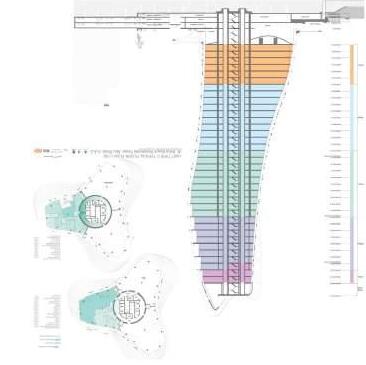
The Waterfront development currently under construction is composed of hotel, 2 residential towers, a commercial tower, conference center, retail center, restaurants, and casino. The primary feature of the 450,000 m2 Waterfront development is a 140m high, 900 bed 5-star hotel oriented North / South. To one side the hotel provides spectacular views to the sea and the other to the city of Colombo. The facades are a 3 dimensional shifting pattern providing a constantly shifting and
evolving texture. The pattern was developed as a simple algorithm using local rules and adjacencies of cells scaled to the dimensions of a room. Each cell is subdivided creating a multiscalar pattern which considers modulation and constuctability. The most complex facade was developed and rationalised into a modular system in Digital Project to allow parametric control over the facade components. The project is currently in construction.
FACADE PATTERN | ALGORITHM DEVELOPMENT
FACADE | MULTISCALAR DEVELOPMENT
FACADE | ALGORITHM RULES
FACADE | 3D PATTERN
FACADE | 3D PATTERN ELEVATION
FACADE PANEL TYPES | ELEVATION
PARAMETRIC
LIGHTER THAN ARCHITECTURE
LOCATION: Architectural Association, London, U.K.
TYPOLOGY: DESIGN RESEACH MASTERS
DATE: 2009
AREA:
ROLE: MASTERS STUDENT
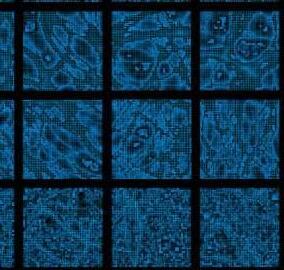
The research aimed at achieving radical different spatial typologies from a materially and computationally emergent, integrated, responsive and continuously reconfigurating a-typological protoSystem through employing multi-agent systems and exploring non-linear digital and analogue computing. Within the research of COMPUTERBLUE, agency is examined through swarm intelligence as a vehicle to enable the structuring of reconfigurable space. By addressing how agent-based systems inform architectural space, the research makes a distinction between deploying agent-based systems as a tool for
pattern formation as opposed to deploying an active system that continuously organizes architectural space. The former enables emergent design by proxy, while the latter attempts to continuously organize space and material in response to external and internal factors. Adopting basic principles of ecological relationships and integrating them with responsive environments and multi-agent systems results in a temporal architecture that is continuously changed through occupation. The final project is an inflatable robotic canopy system that evolves space in response to human sensor interaction in Trafalgar Square.
POROSIS NOUS
GALLERY
LOCATION: Architectural Association, London, U.K.
TYPOLOGY: ADAPTIVE COMPONENT SYSTEM
DATE: 2009
AREA:
ROLE: MASTERS STUDENT
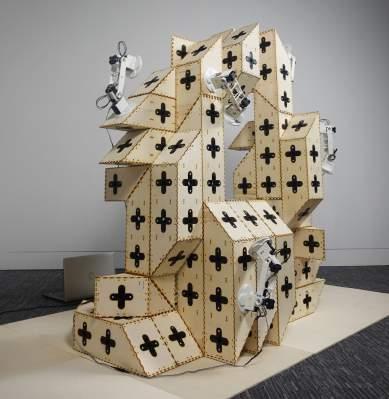
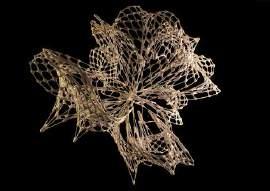
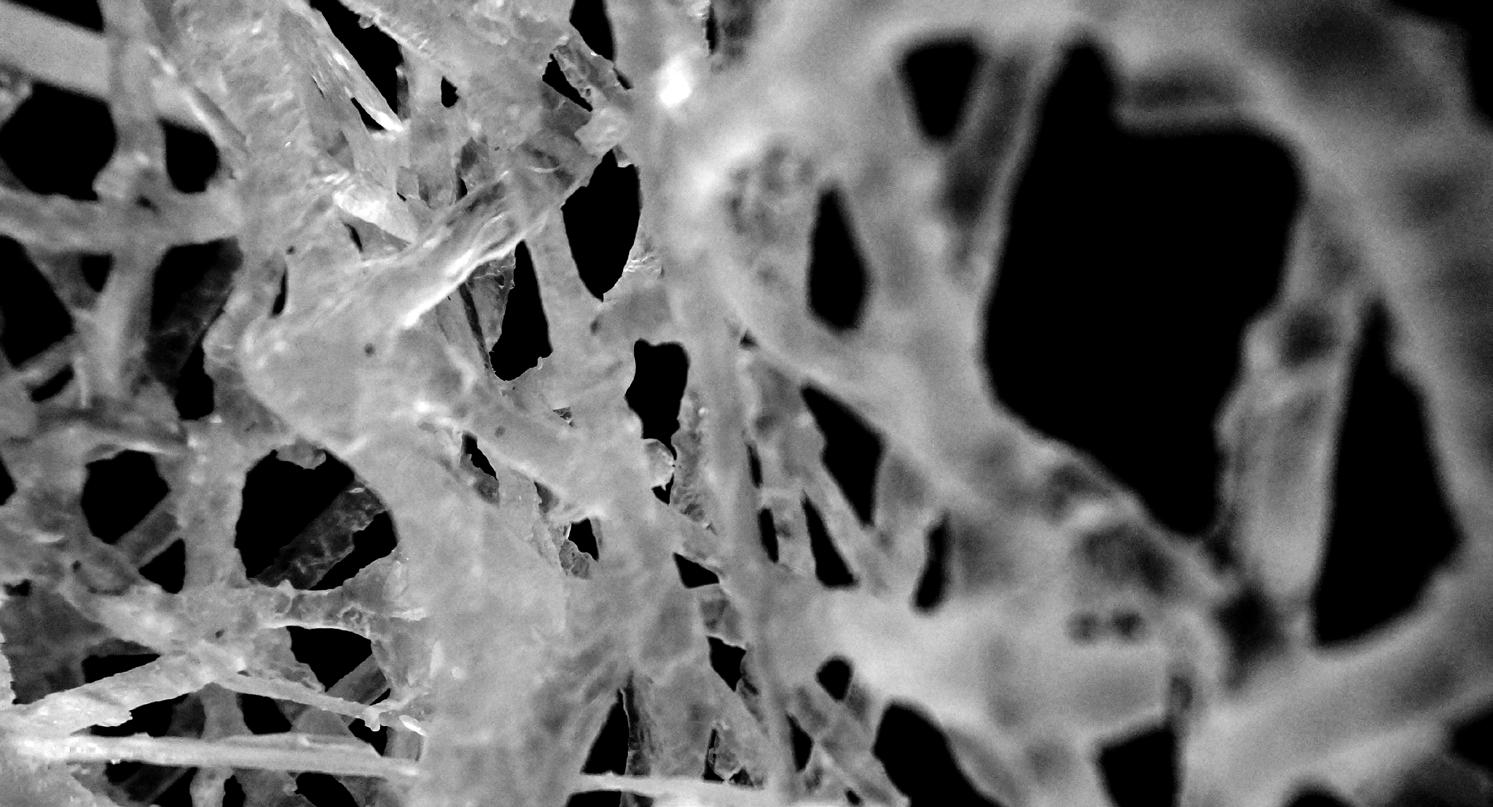
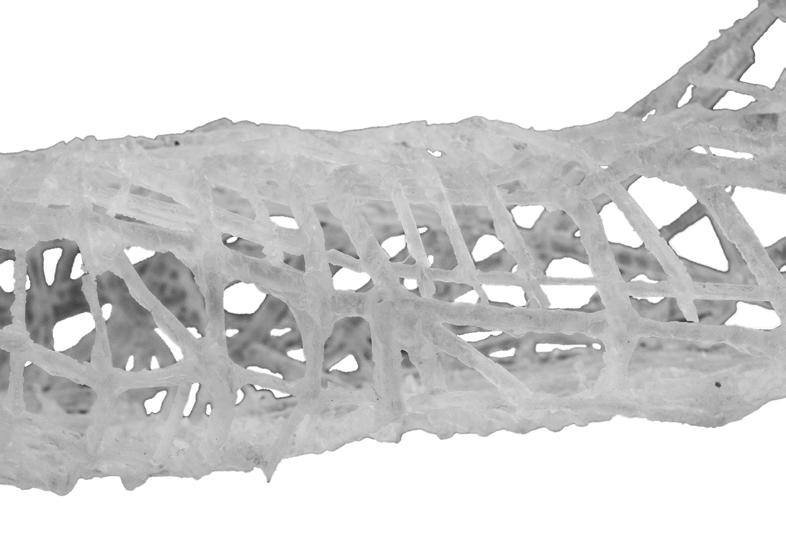
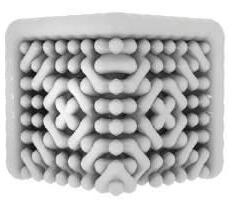
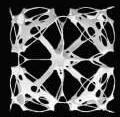
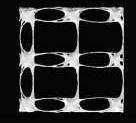
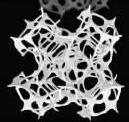
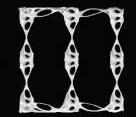
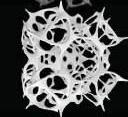
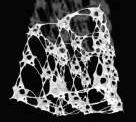
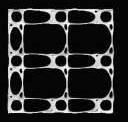
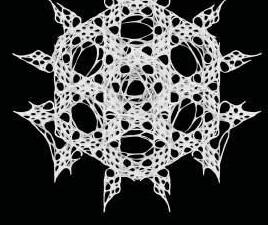
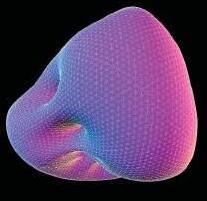
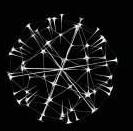
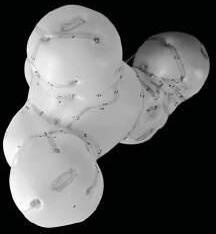
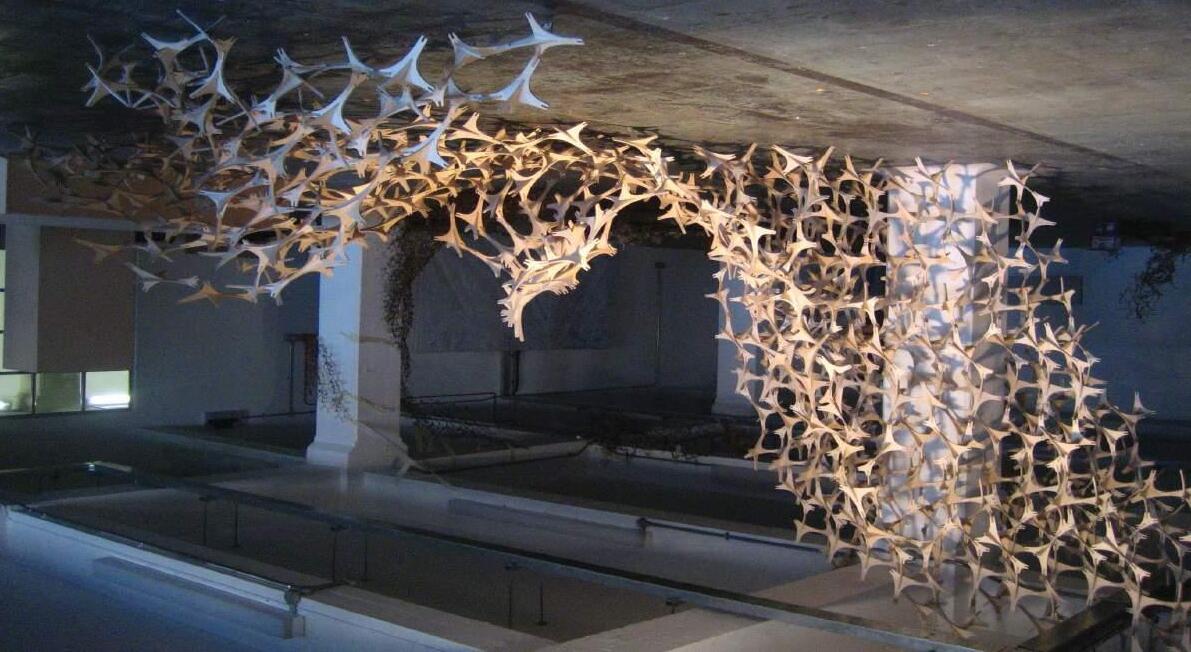
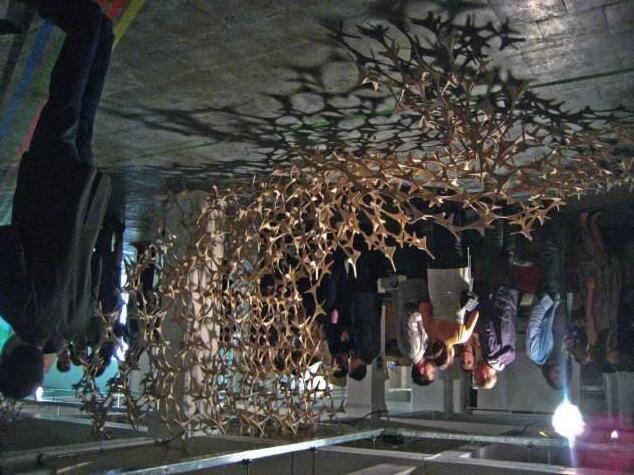
The design search for collective intelligence cannot ignore the importance of the unit within the collective. This piece explores different units and the systems of assemblies and organizations afforded by each unit’s anatomy. Porosis is a modular construction system capable of generating complex cellular structures utilizing standardized units. Designed to
exploit the opportunities offered by a Lindenmayer system. The system was assambled and exhibited as part of London Architecture Festival at the Nous Gallery. The system is capable of exhibiting diverse material and structural behaviours when assembled in open, closed, and semi-open systems.
YAS ISLAND MARINA HOTEL
LOCATION: Abu Dhabi, U.A.E.
TYPOLOGY: Formula 1 Race Track + Marina Hotel
DATE: 2009
AREA: 30,000 M2
ROLE: ARCHITECT
The Yas hotel, a 500-room, 85,000 m2 structure made up of two twelve story hotel towers linked together by a monocoque steel and glass bridge A Grid Shell structure that both cross above and over the Yas Marina Circuit F1 race track. It is the first new hotel in the world to be built over an F1 race
circuit. The hotel’s exterior surface is designed as an environmentally responsive skin that by day reflects the sky and surroundings and by night is lit by a full color changing LED lighting system that incorporate video feeds that are transmitted over the entire surface of the building.
MONOCOQUE |
ROOF CAP | DESIGN COORDINATION
ROOF CAP STRUCTURE
ROOF CAP STRUCTURE | PLAN
RAHA BEACH STRATA TOWER
LOCATION: Dubai, U.A.E.
TYPOLOGY: 5 Star Luxury Condominium Tower
DATE: 2007-2008
AREA: 54,000 M2
ROLE: ARCHITECT
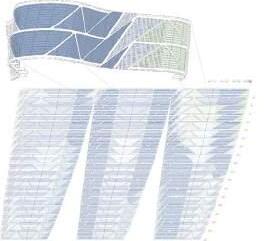
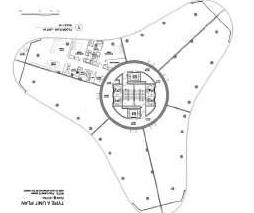
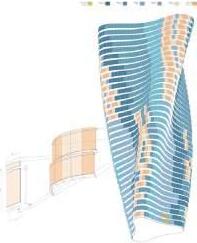
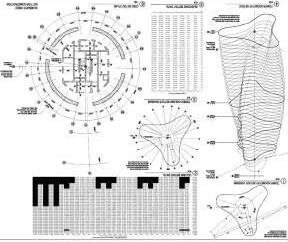
Al Raha Beach Strata Tower is a 40-story condominium tower derived from a tri-part plan that twists and tapers as it rises to the sky. The architectural statement is the result of employing a strategy of simultaneous twisting and tapering the geometry that constitutes the tower form and gestural aspects. Then stemming from that approach, an intricate layered treatment of the façade allows for the integration of the tower with the podium base. The podium itself mediates between the towers stature
and grandeur while being set on a waterside archipelago site. The base element houses the main lobby and public areas all overlooking gardens and the surrounding seascape. Large skylights are set into an articulated roofs capes of the base producing an architectural composition that provides a compelling dune like terrain beneath the spire. Within these spaces are naturally light filled interior environments for housing an array of lounges, spas and interior pools.
TOWER PARAMETRIC MODEL | DIGITAL PROJECT
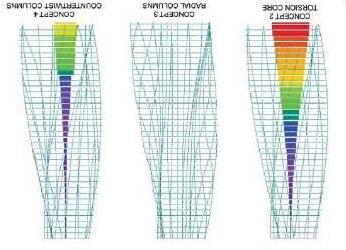
TOWER | STRUCTURAL CONCEPTS
TOWER | STRUCTURE + FACADE ELEMENTS
PODIUM | LANDSCAPE+ CANOPY
THE CIRCLE
ZURICH AIRPORT
LOCATION: Zurich, Switzerland
TYPOLOGY: Mixed Use Airport Extension
DATE: 2009
AREA: 200,000 M2
ROLE: ARCHITECT
Asymptote’s design for a new commercial, cultural, retail and hospitality component for the Zurich Airport (AirSpace) is to be located directly across from the main air terminals of Zurich Airport. Conveniently connected to global hub that is used by over 22 million travelers each year the complex is a destination for a sophisticated international clientele as well as local residents. The project includes wide range of diverse functions such as of luxury commerce, state-of-the-art medical facilities, cul-
tural venues, hotels as well as higher education and business facilities. Asymptote’s proposal integrates contemporary design with a highly refined aesthetic of engineered precision in keeping with the sophistication of Swiss culture. Asymptote’s design for AirSpace is a coherent assembly of architectural components that projects a strong identity within the airport precinct. The scheme is comprised of four distinctive towers sitting above a three-story plinth.
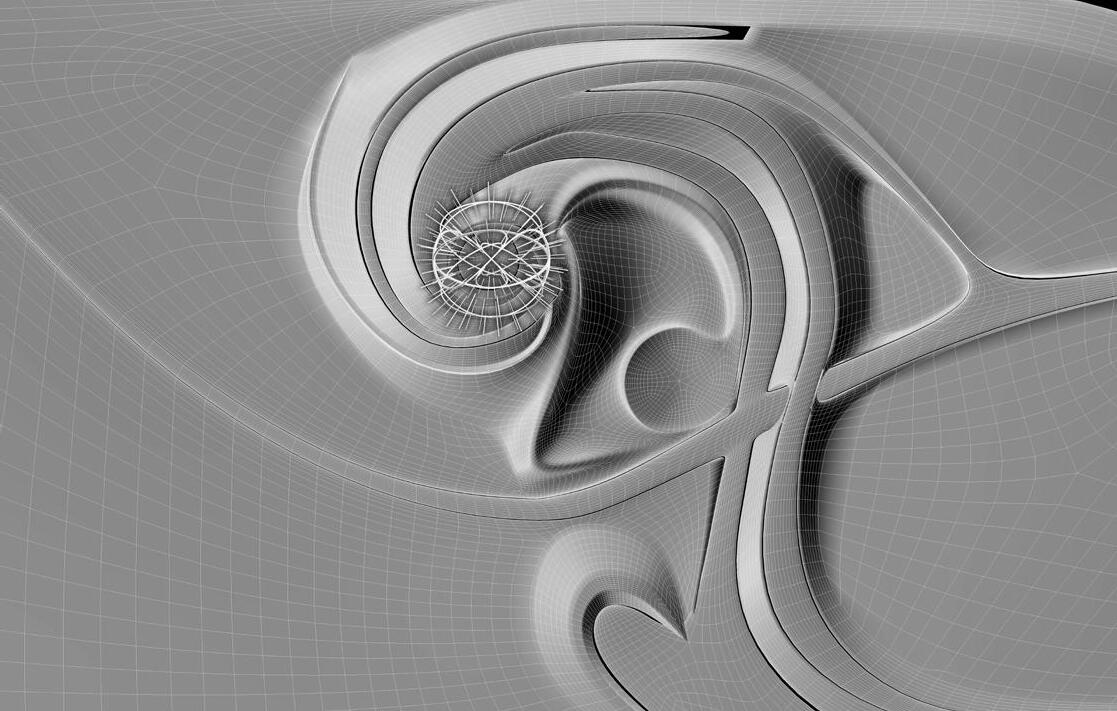
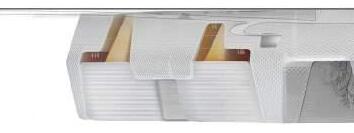
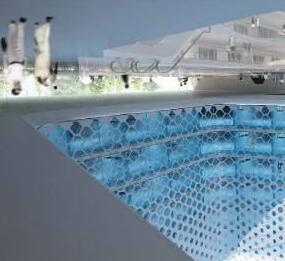
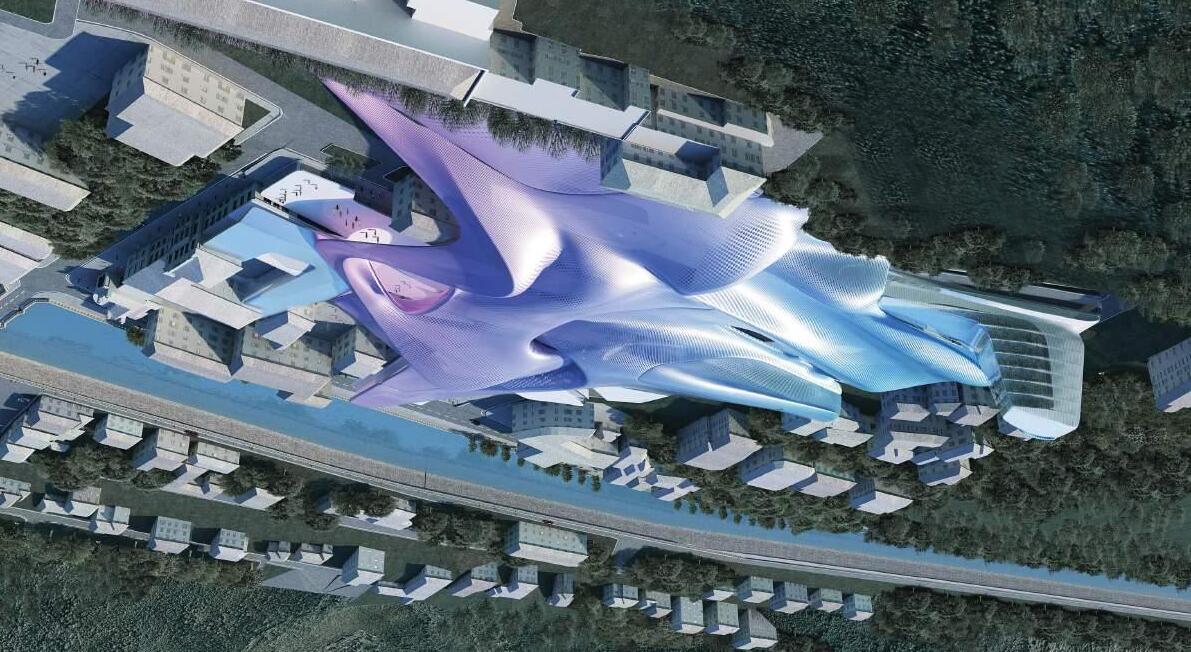
SAN PELLEGRINO THERME MASTERPLAN
LOCATION: San Pellegrino, Italy TYPOLOGY: Spa / Masterplan
DATE: 2008
AREA: 30,000 M2
ROLE: DESIGN LEADER
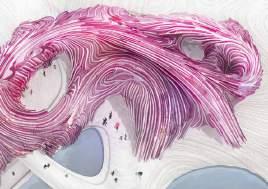
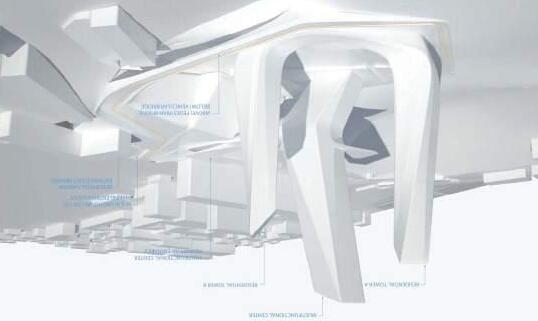
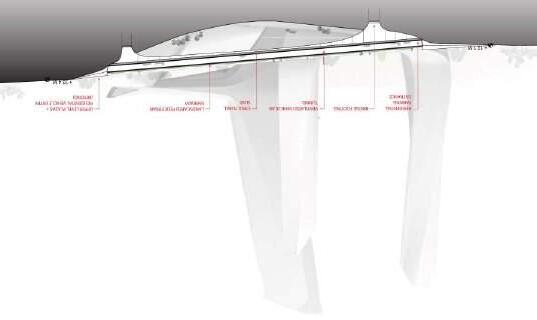
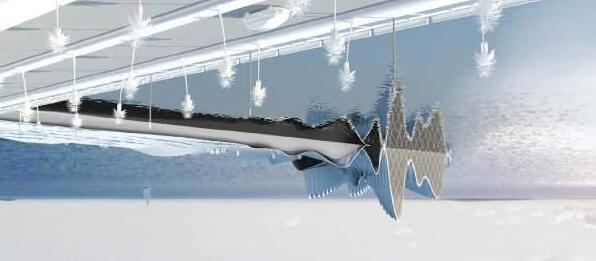
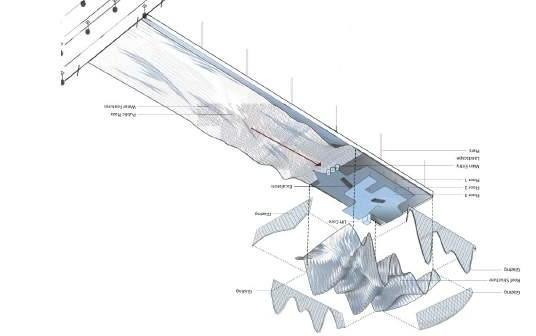
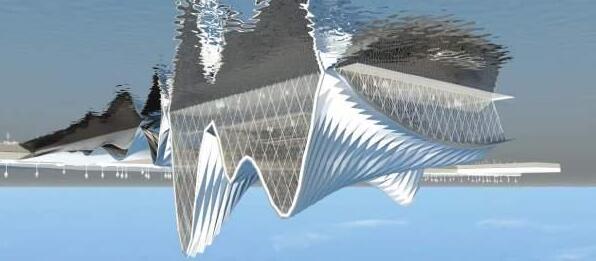
Asymptote’s design scheme for the New Thermal Complex “San Pellegrino Terme” in San Pellegrino, Italy is a master plan that celebrates not only the legacy and renown of the famous San Pellegrino Spring and the water that flows from it, but also the important architectural and geographic features of the site. On a conceptual level Asymptote’s design scheme celebrates “water” in all its guises and forms, primarily as a life source that is essential to health and wellbeing. Water is also celebrated as the essence of beauty, aesthetic power and a mystical and powerful elemental aspect of the human experience. The most prominent and visible aspect of the Asymptote master plan that is inspired by water is a sensual “veil” that covers portions of the new spa and resort complex’s buildings, passageways and
facilities. This technologically advanced covering flows, ebbs, climbs and cascades over and through the master-planned buildings to produce a distinctive, awe-inspiring landscape and iconic reference for the project. The veil is an elegant, architectural “roof-scape” that meanders though the various programs situated on pristine new streets and formed by human-scaled connections. The veil is the key element in a design strategy that unifies the master plan—allowing the new spa design, retail areas, hotel and restaurants to thrive and coexist as a unified whole—but also allows each individual element to remain a unique and intriguing experience in its own right. The masterplan includes hotel suites, high end shopping, residential, thermal bathes, business center and casino components.
PERM NEW MUSEUM
LOCATION: Perm, Russia
TYPOLOGY: CONTEMPORARY ART MUSEUM
DATE: 2007
AREA: 18,000 M2
ROLE: LEAD DESIGNER
Museums, galleries, art houses and halls are all places where ideas and the temperament of eras present and past are celebrated; they are also reservoirs of cultural fluxum where materials are compiled, stored, critiqued and made public. The New Perm Museum is a vessel frozen in time and space, a building that is motivated and brought to action by art and culture and the life of the city in which it is situated. Russian art, from religious icons to abstraction and Constructivism, has been of
remarkable importance at each turn in history, and the New Perm Museum is representative of this remarkable legacy and its unpredictable, but assuredly rich, future. The building envelope is essentially made of two visually disparate, yet harmonic, materials. The underbelly is a taut, mirrored, metal surface that reflects and playfully abstracts the surrounding site and action, while the upper half of the building is made of lacquered, black, timber .
VAKE HEADQUARTERS
LOCATION: Tiblisi, Georgia
TYPOLOGY: CORPORATE HEADQUARTERS, MIXED USE
DATE: 2007
AREA: 18,000 M2
ROLE: PROJECT ARCHITECT
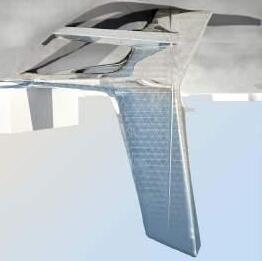
Awarded First Prize in the international competition to design the Vake Multifunctional Center in Tbilisi, Georgia. Asymptote’s vision for the forty-story tower, which will serve as the new corporate headquarters for the Cartu Group, is a symbiosis of elegance and structural components that incorporates high-performance design elements. The project is com-
posed of a signature tower and sister towers for the Vake group. The primary tower includes commericial offices, thermal spa, gym, restaurants, and leisure center including a water park. The signature tower’s form twists and leans set down into the valley with a connection bridge bracing it into the hillside.
LOBBY / BANK RESTAURANT / BAR
ACCOMODATION POOL / SPA FITNESS / GYM
MECHANICAL / SERVICE
OFFIC E LOBBY RESTAU GUEST
POOL / FITNE S
PARKI N
stainability Design Diagram Structural Co
Integrated photovoltaic’s capture solar energy for use and limits solar gain into offices.
Renewable Energy
Ground coupled heat pump reduces cooling and heating energy.
Combined heat and power plant links to pool, absorption chillers, heating and domestic hot water
Plant Location Strategy Aim to avoid cooling towers using ground coupled cooling instead, or energy efficiency, space and noise advantages
Heat exchangers mid height to limit pressure in pipework
Combined heat and power plant, chillers, boilers and transformers locatedatlowlevel.
HVAC Distribution
cooled via active chilled beams to limit ventilation volumes and to provide free cooling during the mid term season Pool, tennis and recreation facilities have dedicated mechanical ventilation from low level plant.
Main ductwork shaft locations. Sizes minimized using efficient cooling technology.
DUBAI ART PAVILION
LOCATION: Dubai, U.A.E.
TYPOLOGY: ART GALLERY
DATE: 2008
AREA: 8,000 M2
ROLE: PROJECT ARCHITECT
Design proposal for a contemporary art complex composed of a series of gallery spaces in Dubai. The undulating roofscape becomes a pedestrian landscape as it merges with the public plaza. Continuously undulating interior spaces provide large open flexible spaces for housing a large range of art.
WTC PERFORMING ARTS
LOCATION: New York City, U.S.A.
TYPOLOGY: PERFORMING ARTS THEATER
DATE: 2008
AREA: 9,000 M2
ROLE: LEAD DESIGNER
The project was a four day commission winning proposal for a new performing arts center on the World Trade Center site.
The performing arts center sits like a jewel surrounded by a louvered skirt that allows the visitor a unique open lobby
gathering space. The location and demands of this particular client suggested that the performing arts center should formally act as an icon in the New World Trade Center.
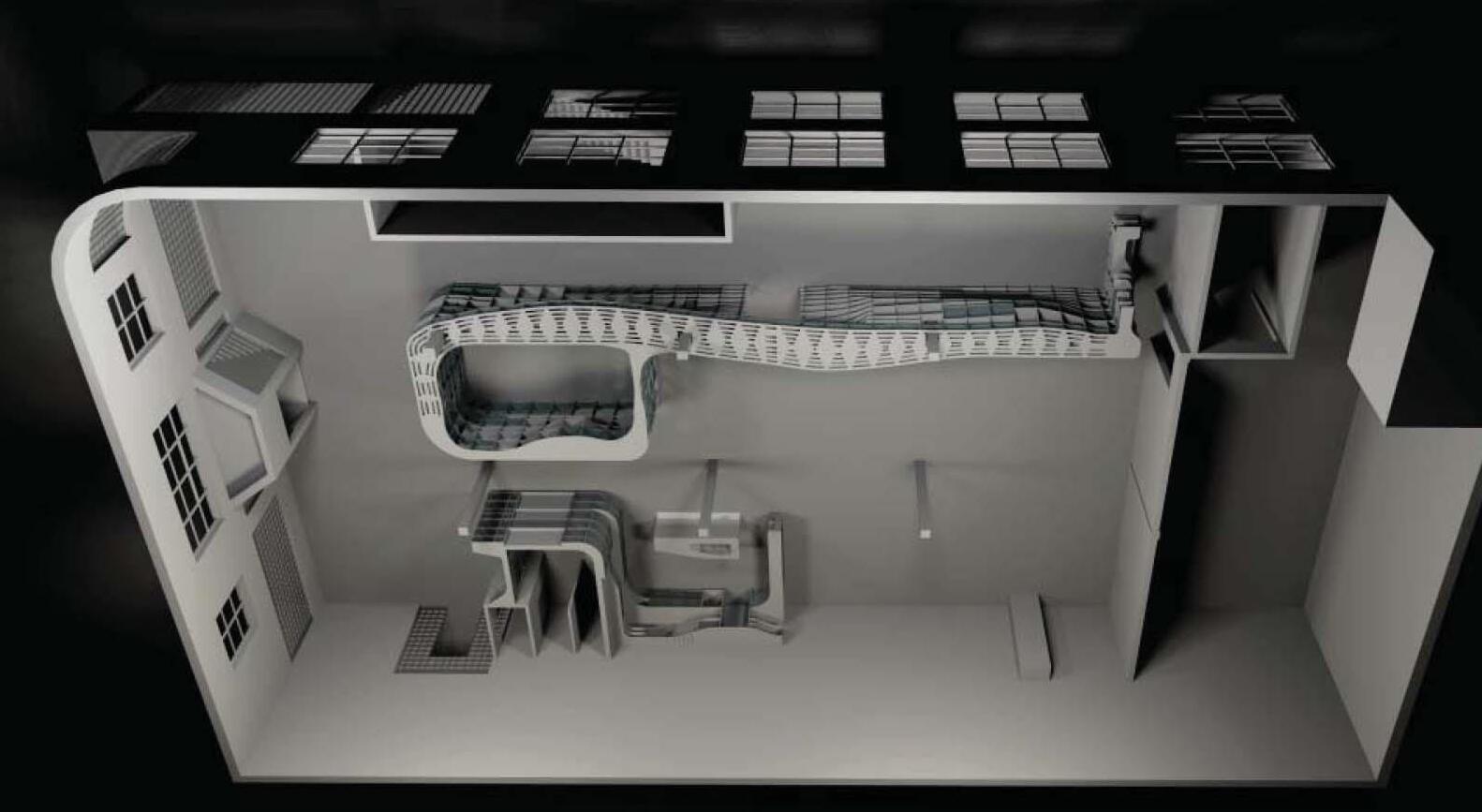
LOCUST OFFICE SPACES
LOCATION: St. Louis, U.S.A.
TYPOLOGY: OFFICE INTERIOR
DATE: 2005
AREA: 300 M2
ROLE: ARCHITECT
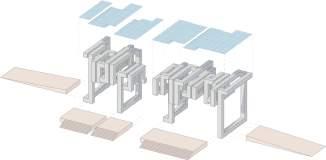
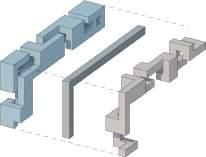
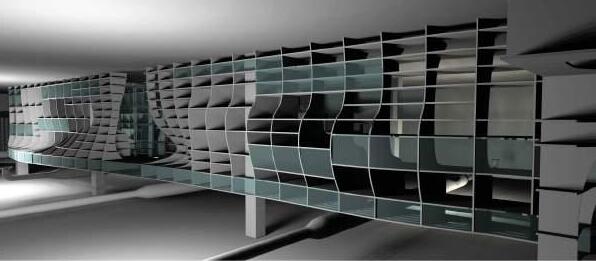
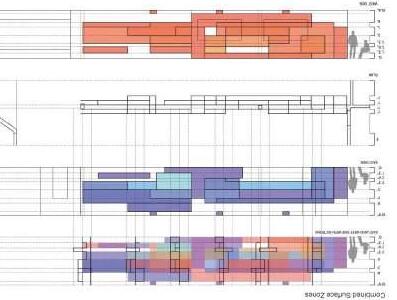
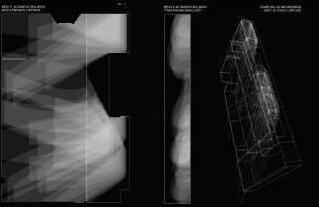
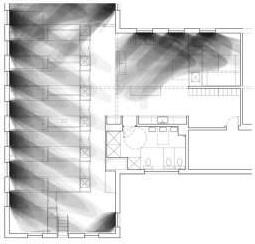
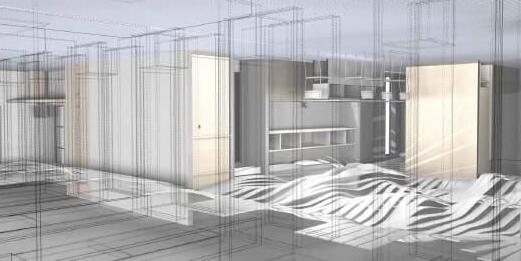
A wall system was developed to support two architectural offices within a single open plan. The wall system provides a degree of separation and privacy between the two spaces while allowing a series of selected views, selected shared spaces, and potential collaborative spaces. The design was derived by compiling and compressing a series of instrumental diagrams overlaying wall usage, wall furniture, artificial lighting, view points, and a series of sun and shadow movements. These diagrams provided drivers for the formal language of the wall system.
USAGE | ZONING DIAGRAMS
WALL SHELVING | PHYSICAL MODELS
DEMPSEY’S
WOMEN’S SHELTER
LOCATION: St. Louis, U.S.A.
TYPOLOGY: WOMEN’S SHELTER INTERIOR
DATE: 2005
AREA: 250 M2
ROLE: ARCHITECT
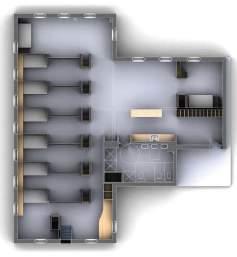
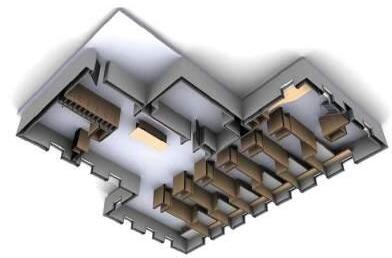
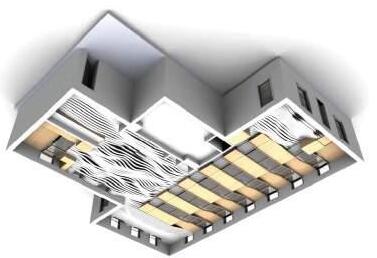
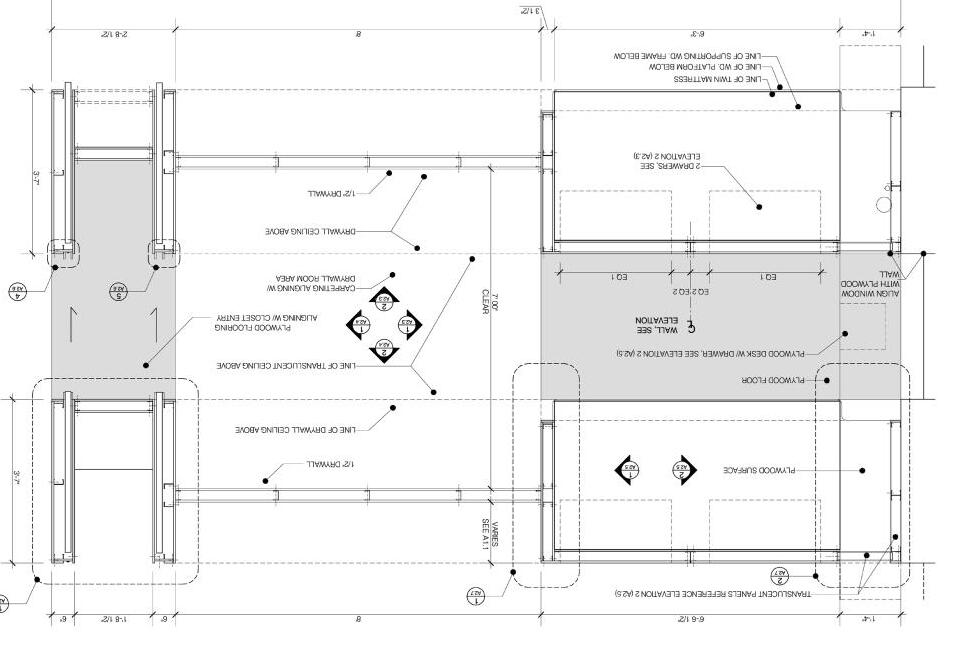
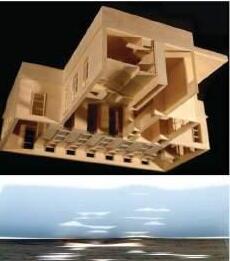
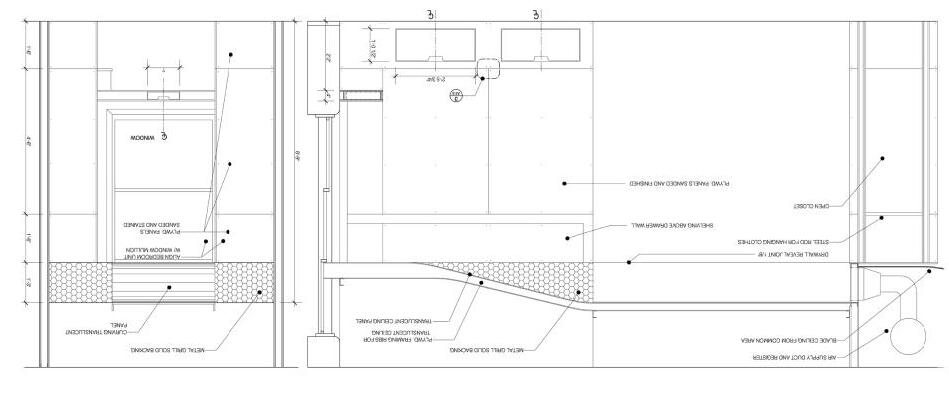
Interior fitout of an existing office building to convert it into a women’s shelter for abused or homeless women in St. Louis, Missouri. The focus of the project was to provide an aesthetic play of light and shadow to inspire the dispossessed
women staying there. The ceiling system design provides natural light for each bedroom while reflecting and pulling natural light deeply into shared internal spaces.