


En el mundo de la ingeniería y la ciencia, nos encontramos constantemente con sistemas que cambian con el tiempo, ya sean circuitos eléctricos, procesos químicos, modelos económicos o incluso poblaciones biológicas. Estos sistemas dinámicos, como se les conoce, son aquellos cuyo comportamiento depende no solo de las entradas actuales, sino también de su historia y estado pasado.
Para comprender y analizar el comportamiento de estos sistemas, utilizamos herramientas matemáticas como la función de transferencia. La función de transferencia es una representación matemática que relaciona la salida del sistema con su entrada en el dominio de la transformada de Laplace. Es una herramienta poderosa que nos permite analizar la respuesta del sistema a diferentes tipos de entradas, predecir su comportamiento en estado estacionario y evaluar su estabilidad.
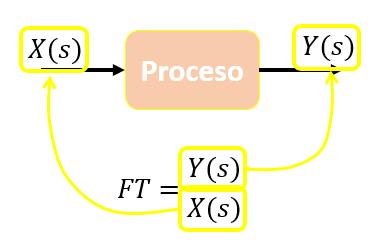
La función de transferencia se define como la relación entre la transformada de Laplace de la salida del sistema, Y(s), y la transformada de Laplace de la entrada del sistema, X(s), suponiendo que todas las condiciones iniciales son cero. Matemáticamente, se expresa como:

Donde G(s) es la función de transferencia en el dominio de la transformada de Laplace.
La función de transferencia nos proporciona información valiosa sobre el comportamiento del sistema en el dominio de la frecuencia. A partir de ella, podemos obtener la respuesta del sistema a entradas escalón, rampa, impulso y senoidales, analizar su tiempo de subida, tiempo de establecimiento y sobreimpulso, y determinar si el sistema es estable o inestable

Los sistemas en serie y con realimentación son configuraciones comunes en ingeniería de control. En un sistema en serie, la salida de un bloque o subsistema se convierte en la entrada del siguiente, conectando sus salidas y entradas de forma consecutiva. La función de transferencia total del sistema en serie se obtiene multiplicando las funciones de transferencia de cada bloque individual.
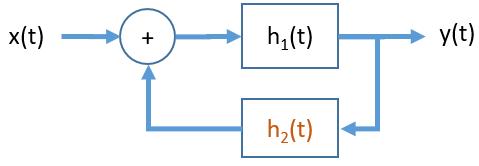
En un sistema con realimentación, una parte de la salida del sistema se reenvía como entrada al mismo, creando un bucle cerrado. La función de transferencia de un sistema con realimentación negativa se obtiene dividiendo la función de transferencia de la parte de avance (sin realimentación) por la suma de uno y la función de transferencia del camino de realimentación.

Los sistemas de primer orden son aquellos que se describen mediante una ecuación diferencial de primer orden. Su función de transferencia presenta un único polo en el plano complejo de Laplace, lo que significa que su respuesta a las entradas es relativamente simple y predecible. Los sistemas de primer orden son comunes en diversos campos, como circuitos RC, procesos de calentamiento y enfriamiento, y modelos biológicos.
La función de transferencia general de un sistema de primer orden es:
Donde:
K es la ganancia estática del sistema. τ es la constante de tiempo del sistema, que determina la velocidad de su respuesta.
Los sistemas de segundo orden se describen mediante una ecuación diferencial de segundo orden. Su función de transferencia presenta dos polos en el plano complejo de Laplace, lo que resulta en una respuesta más compleja y variada a las entradas comparado con los sistemas de primer orden. Estos sistemas son comunes en mecánica vibratoria, control de circuitos y sistemas electromecánicos.
La función de transferencia general de un sistema de segundo orden sin amortiguamiento es:
G(s) = ωn^2 / (s^2 + 2ζωns + ωn^2)
Donde:
ωn es la frecuencia natural del sistema.
ζ es el coeficiente de amortiguamiento, que determina el tipo de respuesta del sistema (subamortiguado, críticamente amortiguado o sobreamortiguado).
La estabilidad de un sistema es una propiedad fundamental que determina si su salida se mantiene acotada y converge a un valor de estado estacionario a largo plazo, independientemente de las condiciones iniciales o entradas perturbadoras.
Un sistema estable presenta una salida que no crece sin límites con el tiempo, mientras que un sistema inestable presenta una salida que diverge o oscila sin control.