Architect and M. Arch graduate from Istanbul Bilgi University. My architectural journey is deeply rooted in both creative design and computational innovation. As a lifelong student, I am continually expanding my skills, currently focusing on Python scripting for robotic optimization in Rhino3D. I believe in the power of collaboration. Through teaching, learning, and continuous experimentation, I aim to shape the future of architecture by integrating digital technologies and sustainable practices.
• 2023-25: Master of Architecture | Architectural Design Master Program @Istanbul Bilgi University.
• 2022-23: Computational Design Course | SIDI School of Disruption | Instructed by Dr. Onur Yüce Gün.
• 2019-23: Bachelor of Architecture @Istanbul Bilgi University.
• 2023-24: Robotic EarthCrafts II, International Workshop, at Istanbul Bilgi University.
• 2022: Participant in “Designing by Informed Toolpaths Workshop” by Gamze Gündüz at Istanbul Bilgi University.
• 2022: Participant in “Robo-3DP Workshop” by Rolab Studio, Bilgin Studio, Kalyon Group.
Email: Abdullah.S.Mallah@gmail.com
Phone: +90 552 519 81 24
• 2024-25: Administrative & Teaching Assistant at Istanbul Bilgi University. (Interior Design Studio 2 & Computation Based Basic Design Studio 1 & 2).
• 2022: Intern Architect at “MELIKE ALTINISIK ARCHITECTS
- MAA” Computational & Architecture Design Team.
• 2022-23: Technology and Buddy System Executive at “Kazandibi Architecture Club” Istanbul Bilgi University.
• 2017-19: Intern at “Mallah Design Studio” as Architectural Assistant in Coordination with DaeWha Kang Design.
• 2015-17: Intern at “Mallah Design Studio” Architecture Design & Construction Team.
• 2022: Participant in “recycled plastics workshop” with contributions of Rolab Studio, BAYETAV, and KOSBİ ZülfüMevlüt Çelik Vocational and Technical Anatolian High School.
• 2022: Participant in “COMPUTER ORIENTED DESIGN AND ROBOTIC MANUFACTURING WORKSHOP” at Üretimhane.
• 2022: Participant in “Liquid Architectures in Metaverse workshop” at DigitalFUTURES 2022.
• 2021: Participant in “Fractum Workshop” by PadaLab, at DigitalFUTURES 2021.
Arabic: Native
English: Fluent
Turkish: Intermediate
Software:
Adobe Creative Suit (proficient)
AutoCAD (advanced)
3Ds Max (advanced)
Revit (intermediate)
Sketchup (proficient)
Rhinoceros 3D (proficient)
Computing:
Grasshopper (proficient)
Python (intermediate)
Houdini FX (intermediate)
TouchDesigner (intermediate)
Rendering:
V-ray for 3Ds Max (proficient)
V-ray for Rhino (advanced)
Enscape (proficient)
Lumion (advanced)
Digital Fabrication Tools:
CNC, Laser Cutter, 3D printer, KUKA Robot arm (advanced)
• 2023: Participant in “Museum of Emotions Competition #2” at BUILDNER.
• 2023: Phase 1 - Venice Architecture Biennale Pavillion of Türkiye 2023.
HONORS & AWARDS
• 2025: Nominated as emerging architectural talent under 30 at “BIG SEE Perspectives“ Ljubljana, Slovenia.
• 2023: High Honor Award in “B.Arch Programme” Istanbul Bilgi Univeristy.
• 2021: 2nd place in “Environmental Design Competition 03” at Istanbul Bilgi University.
• 2025: Participant, “REC II”, exhibited at The Türkiye Pavilion, GROUNDED, the 19th International Architecture Exhibition of La Biennale di Venezia, 10 May - 23 Nov, Sale d’Armi, Arsenale.
• 2024: Co-Curator, “Entangling with The Han: An Exhibition on a Design Studio Experiment”, exhibited at Arthan Gallery, 29 July - 12 Aug. Kurşunlu Han, Istanbul.
• 2023-25: Post-Graduate Architectural Design degree at Istanbul Bilgi University, 50% Scholarship.
• 2019-23: Undergraduate Architecure degree at Istanbul Bilgi University, 60% Scholarship.
NEIGHBORHOOD HUB
PLUG_IN DISTRICT
SPACE-FILLING POLYHEDRAL PAVILION
ADDITIVE MANUFACTURINGROBOTIC FABRICATION
ROJO SANGRE
ROBOTIC EARTHCRAFTS II -
LA BIENNALE DI VENEZIA IN 2025
DRAWING MACHINE
FRACTUM WORKSHOP
THE
THE NEIGHBORHOOD HUB
Project Type Academic Undergraduate
Studio Type Architectural Design
Date
4th Year Fall 2022
Location Istanbul, Türkiye
INCUBATION HUB AND LEARNING COMPLEX DESIGNED TO FOSTER STUDENTS AND LOCALS
The project focuses on the objective of adaptive Re-use of the site and it’s current and future plans, offering the users and the visitors of the area a space that would allow them to be part of the district.
Known for its lively nightlife, cultural attractions, and sporting events, Beşiktaş is home to the popular Beşiktaş J.K. Football club, as well as a variety of restaurants, bars, and clubs. Visitors can also explore cultural landmarks such as the Beşiktaş Jardırı seaside promenade and the Yıldız Palace, a former imperial Ottoman palace.
The project was designed with an open space plan on the ground floor, which allows different profiles to move around freely, observe ongoing activities, and interact with them.
The open space plan on the ground floor provides a flexible and adaptable environment that caters to different activities and functions. The design aims to encourage social interaction and community engagement, creating a sense of belonging among the project’s residents and visitors. The space’s openness also promotes natural lighting and ventilation, making it more sustainable and energy-efficient. Overall, the project’s design prioritizes user experience and social responsibility, contributing to the larger goal of sustainable architecture.
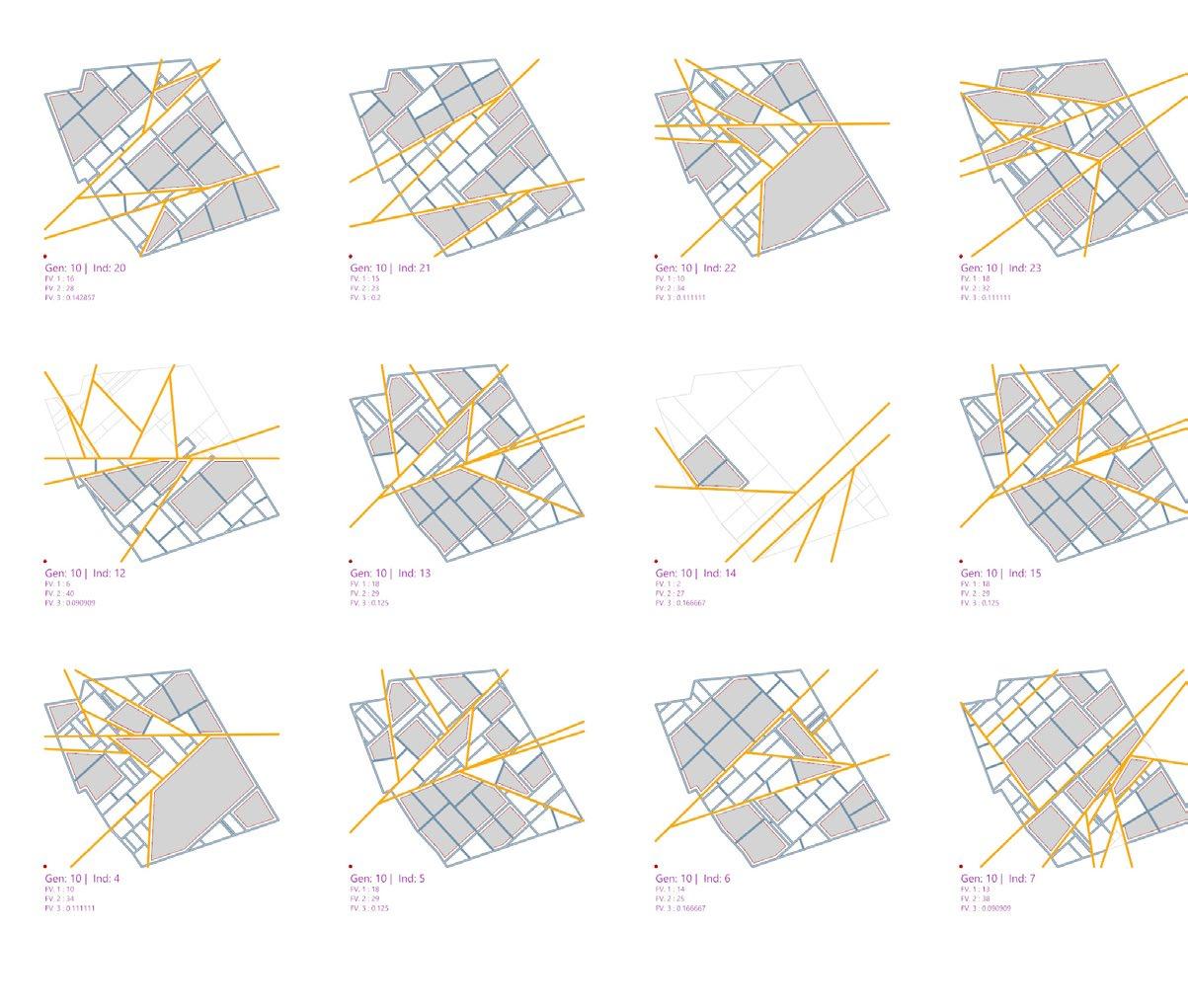
Urban Grain Size & Ecological Study
INPUT_SITE_AREA: [Type: Closed Curve]
INPUT_STREETS_NETWORK: [Type: Polylines]
SORT_EDGES_BY_CLOSEST_POINT:
Input:
Site[Type: Closed Curve]
Streets[Type: Polylines]
Threshold_Cull[Type: Int]
Output:
Polylines[Type: Polylines-List]
SITE_PLOTS:
Input:
Path_Network[Type: Polylines]
Site_Flat_Surface[Type: Planar_Srf]
Output:
Plots[Type: Planar_Srf-List]
INPUT_CONTEXT_BUILDINGS_SQR_METERS:
Input:
Buildings[Type: ClosedPolylines]
Output:
SqrM[Type: Int]
INPUT_CONTEXT_COURTYARDS_SQR_METERS:
Input:
Buildings[Type: ClosedPolylines]
Output:
SqrM[Type: Int]
After generating the optimal site plan, we still needed to manually input additional information. This process required us to discuss the outputted results with our instructors, which were then incorporated into our building design along with ecological testing. In the end, we were able to create a design that met the needs of the site, its users, and the project program.
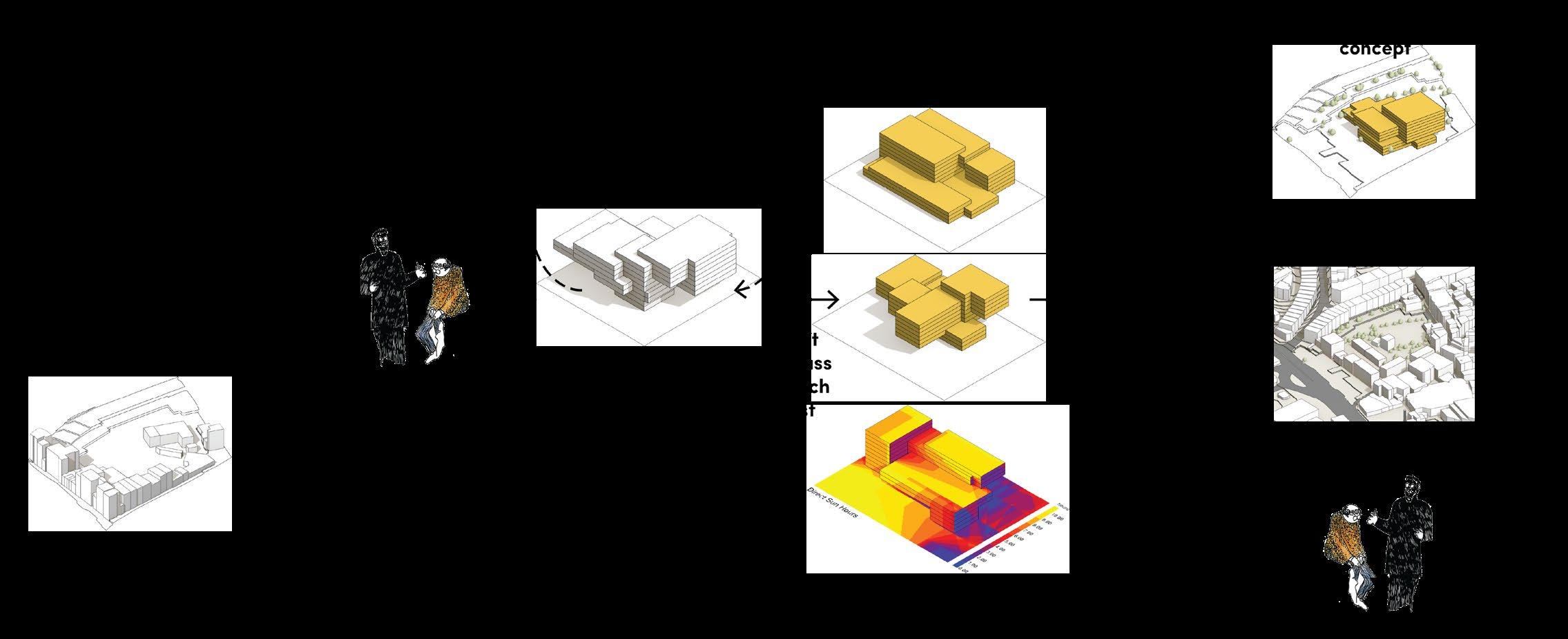
As part of our computational design study for the site, our goal was to generate iterations of a site plan that considered multiple inputs, including the site context, the number of connected streets, the building morphology, and other ecological factors such as wind CPD and direct sunlight.
This script runs over 1000 iterations at a time and filters through them, outputting the best 50 plans. To ensure that the end results were usable, we set the number of buildings and greenery as objectives to filter through them. The next step was to manually review the outcomes and edit them to fit our needs and the site requirements.
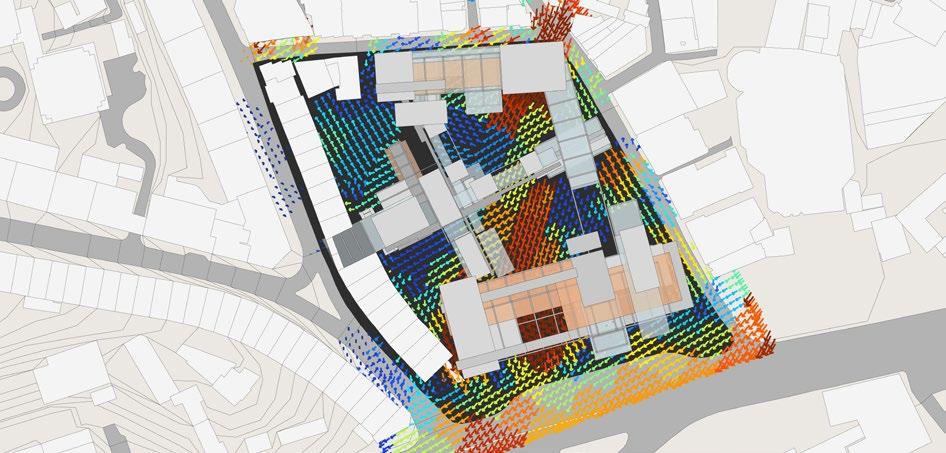
CFD analysis was conducted during the design process to ensure that the end results allow fresh air to flow through the building mass and ground floor spaces. At the same time, wind speed was monitored and blocked in certain areas to keep it as comfortable as possible.
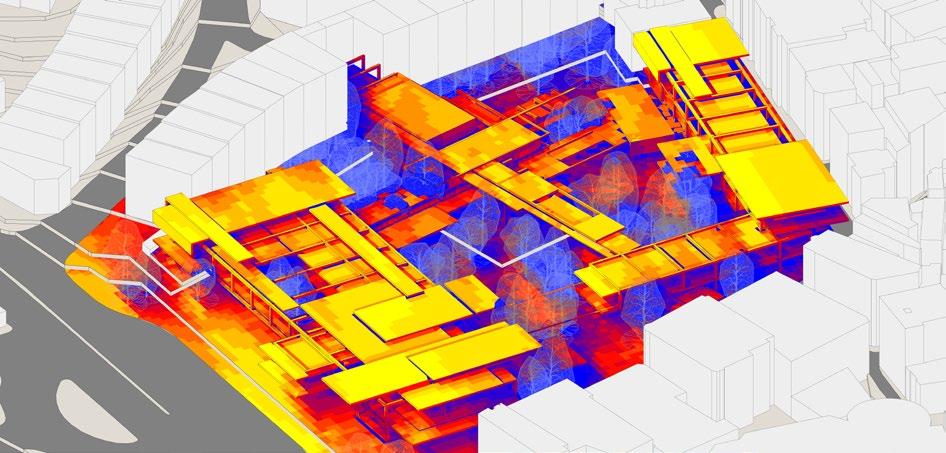
Direct Sun-Light analysis was conducted during the design process to ensure that the end results allow for enough natural light and to reduce the need of artificial lighting, along side that, to improve the building heating and cooling performance.
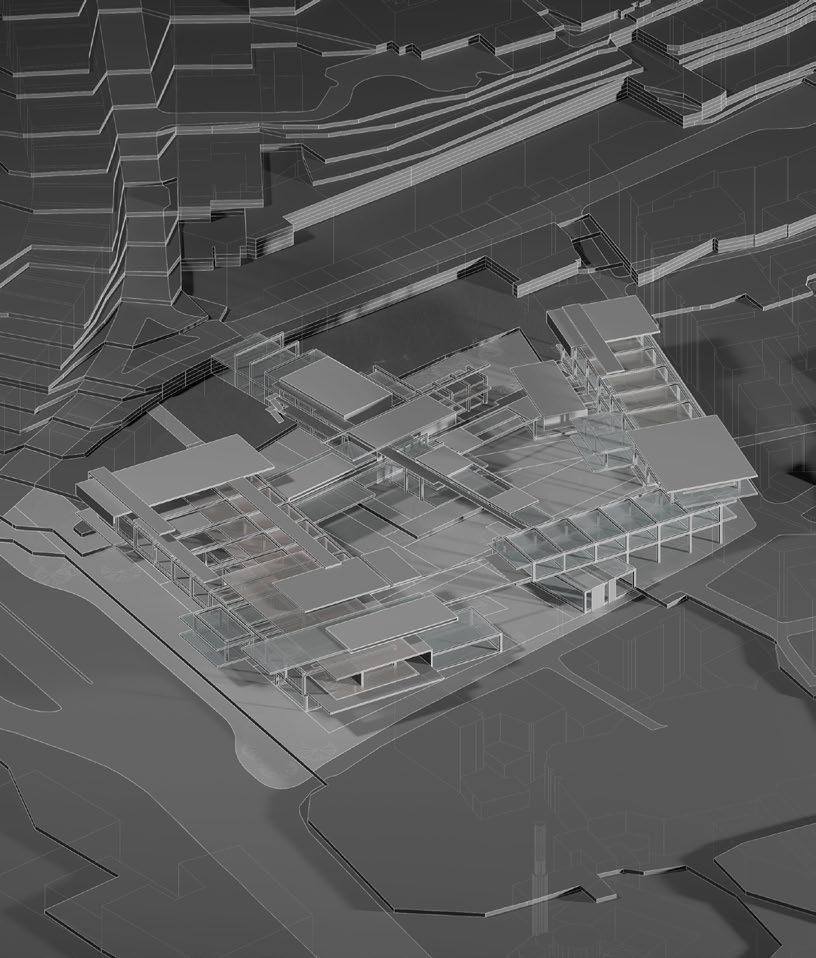
The building section focuses on allowing direct sunlight to enter the open spaces and through the first floor level to the ground floor level. It also keeps a vertical circulation through the building levels and an open ground floor to connect urban life with the building.
Project Type
Academic Postgraduate
2nd Semester Spring 2024
Location Istanbul, Türkiye
PLUG_IN DISTRICT
URBAN DESIGN PROJECT ENVISIONING A FUTURISTIC
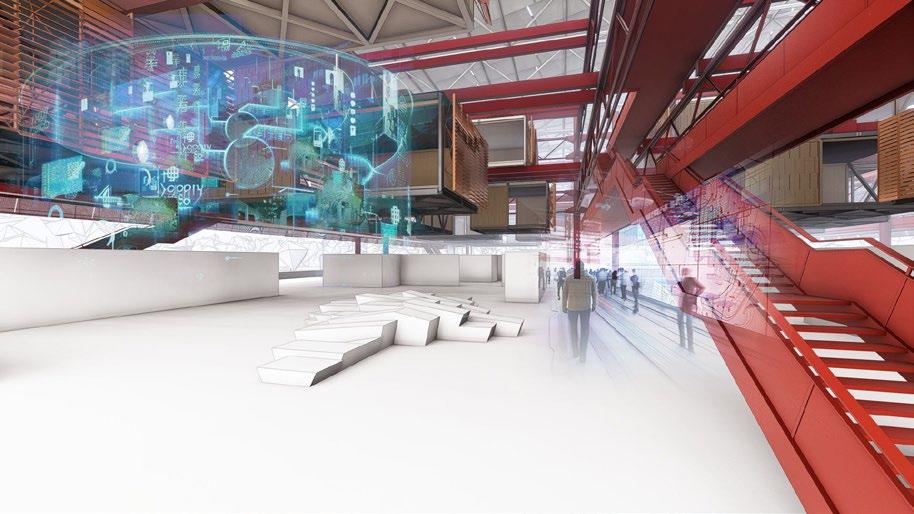
URBAN AREA WITH PHYGITAL SPACES
The “Plug_In District” is an urban design project envisioning a futuristic urban area that seamlessly integrates electric mobility (e-mobility) with phygital spaces – hybrid environments blending physical and digital realms. The project aims to foster a dynamic, sustainable environment where electric transportation and digital-physical interactions coexist, supporting green mobility and interactive public spaces. Key themes include Web3 technologies, metaverse applications, sustainable e-mobility, and phygital (physical+digital) experiences.
Instructors: Banu Tomruk - Begüm Aydınoğlu
The project’s objectives are to leverage emerging technologies and design strategies to promote green transportation, build smart infrastructure, and create interactive public spaces. By integrating Web3’s decentralized infrastructure, metaverse virtual platforms, and sustainable e-mobility solutions, the “Plug_In District” seeks to enhance urban living, reduce environmental impact, and prepare cities for a digital-physical future.
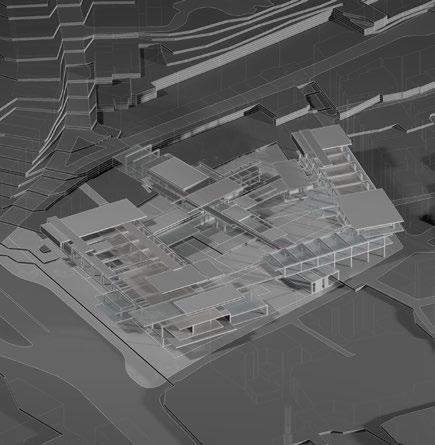
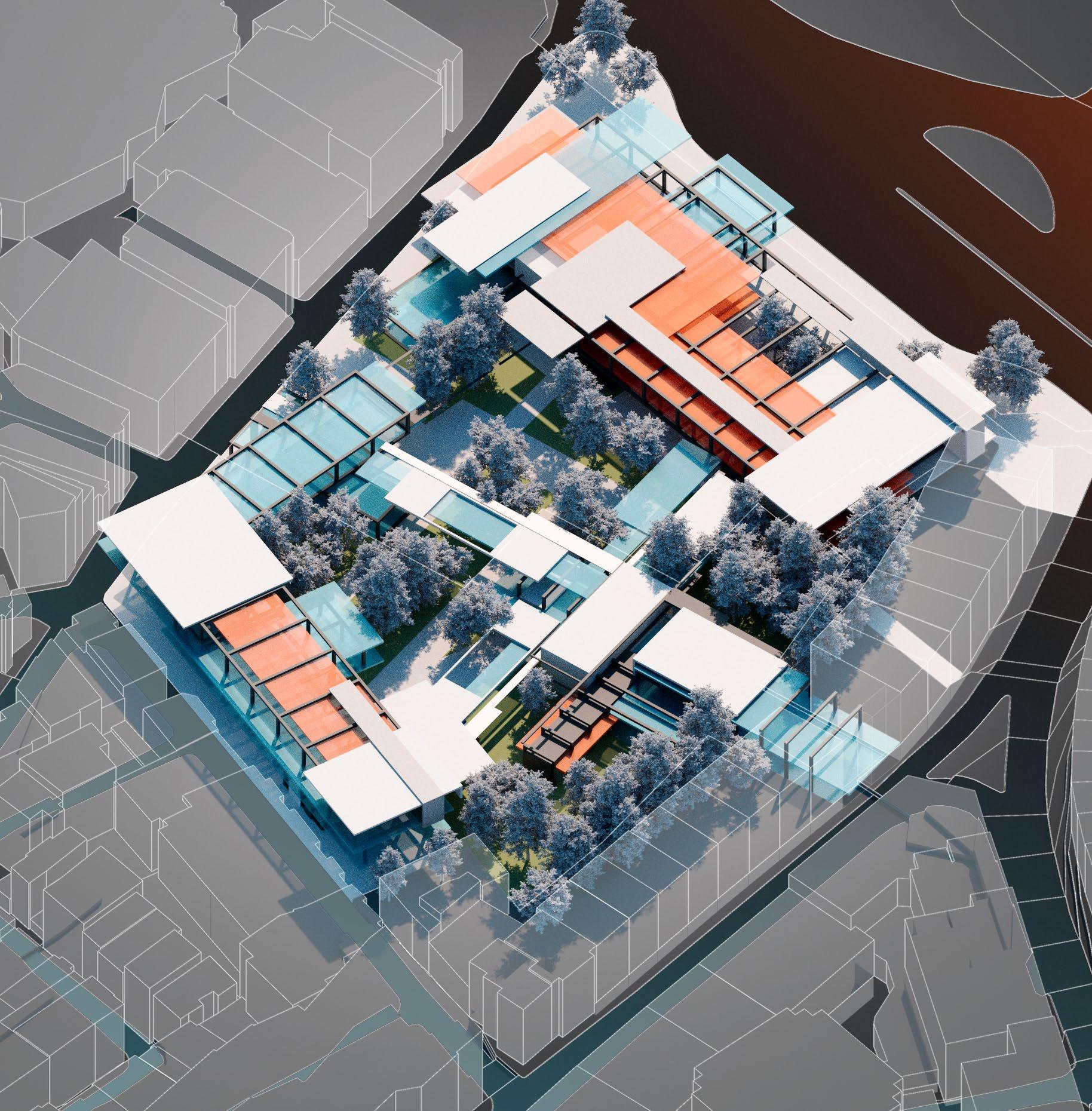
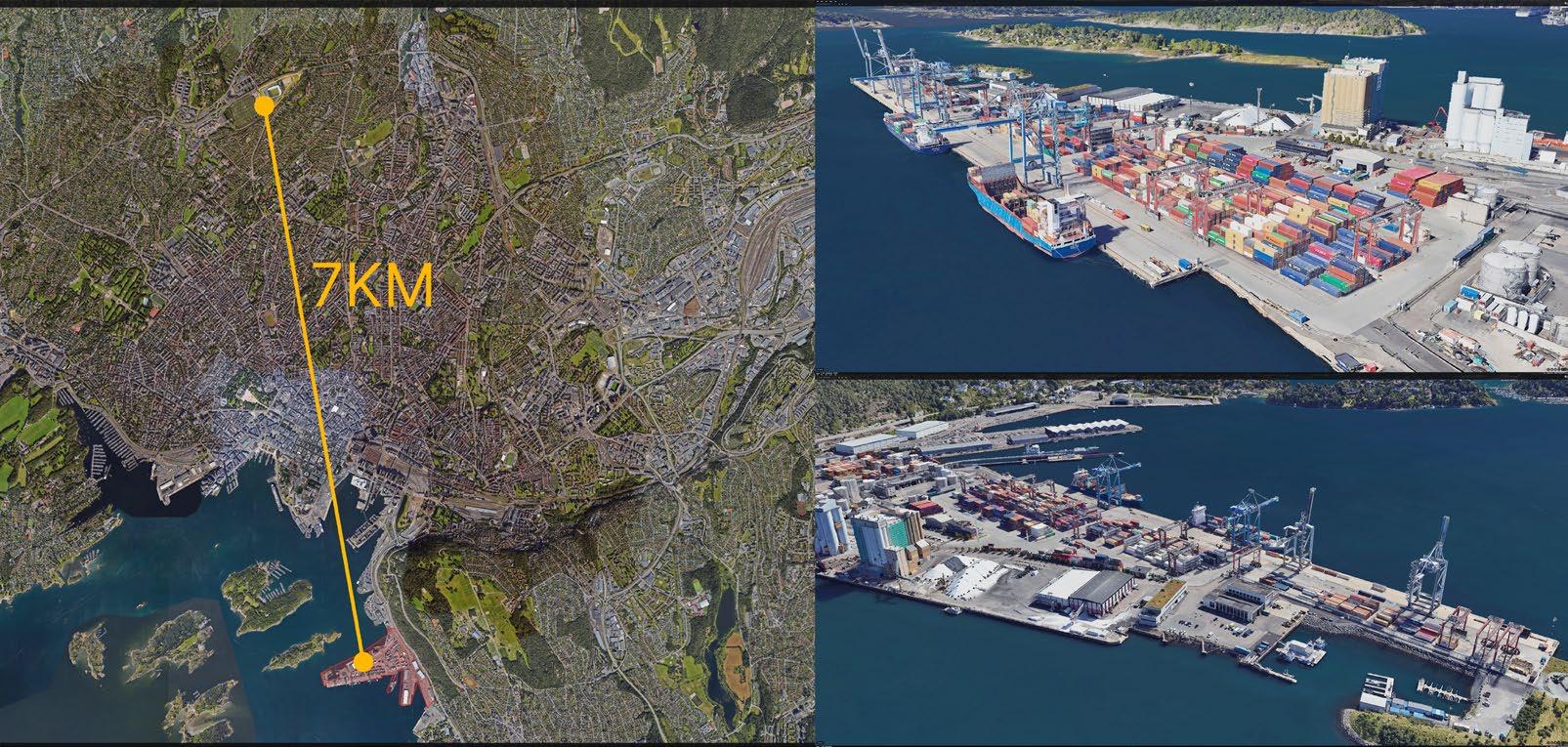
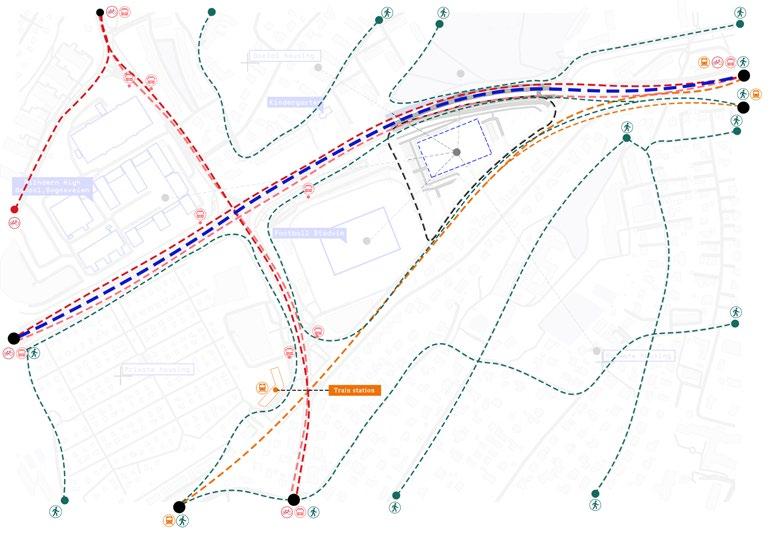
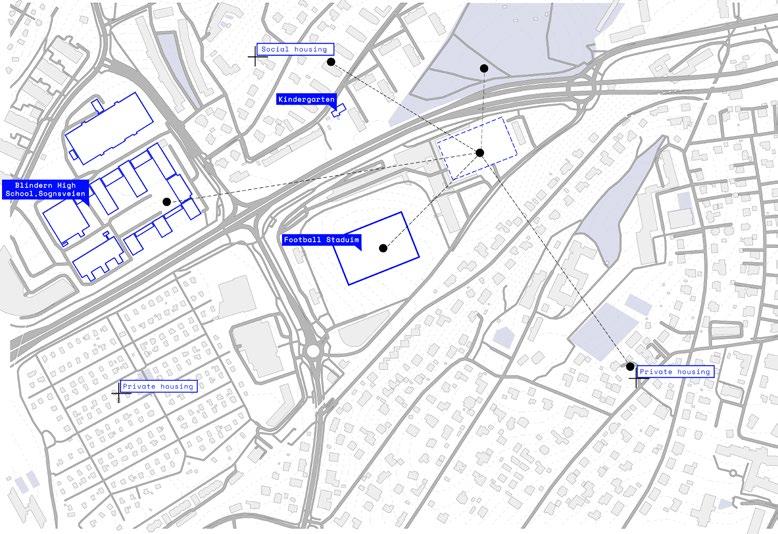
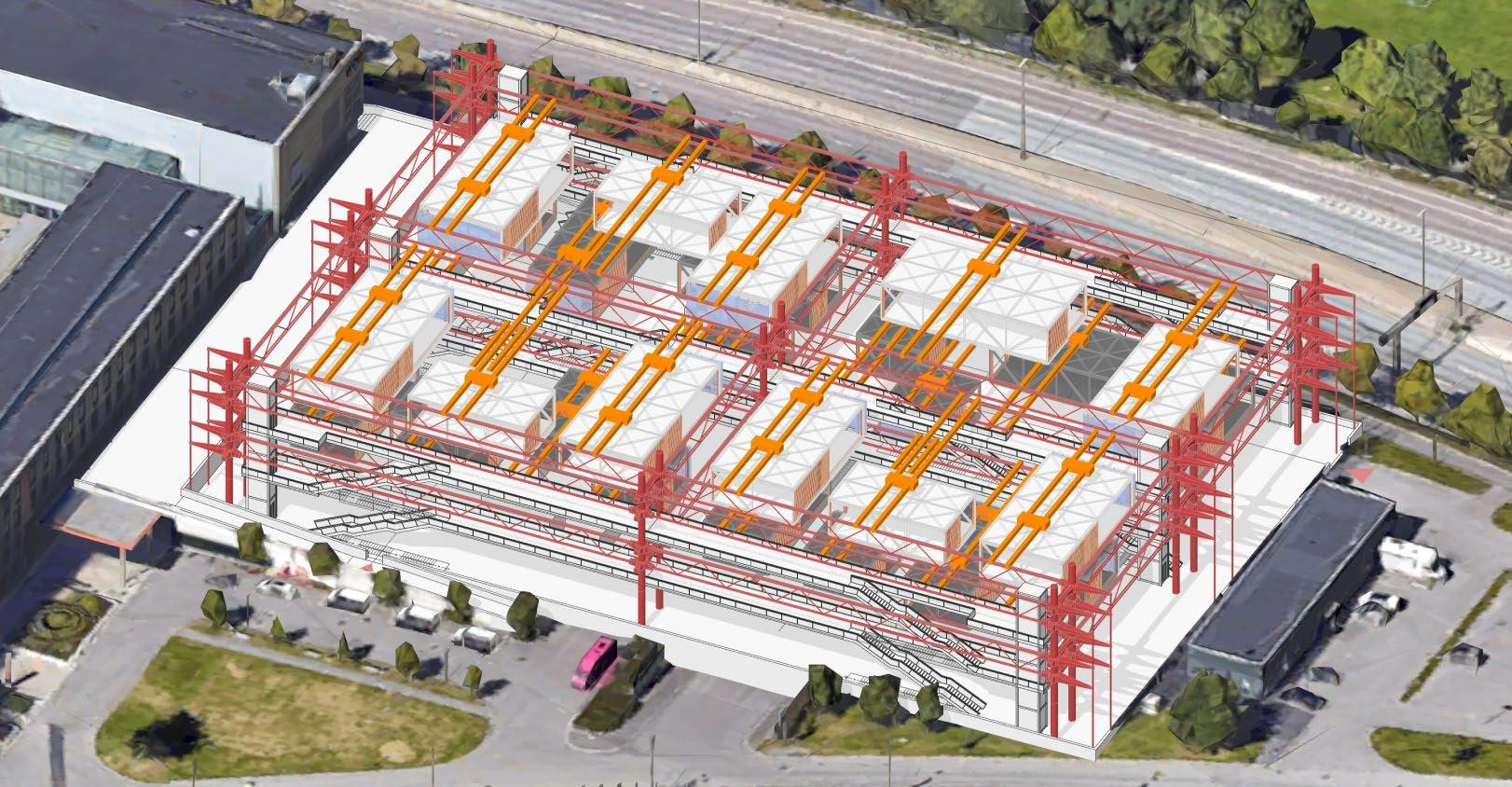
This aerial analysis of the site highlights the strategic location and existing infrastructure, demonstrating the potential to integrate digital-physical (phygital) spaces and sustainable e-mobility systems. Such integration facilitates optimized land use, increased accessibility, and responsive urban planning. Utilizing scenario planning and detailed site analyses, the project visualizes mobility patterns, connectivity, and land use optimization.
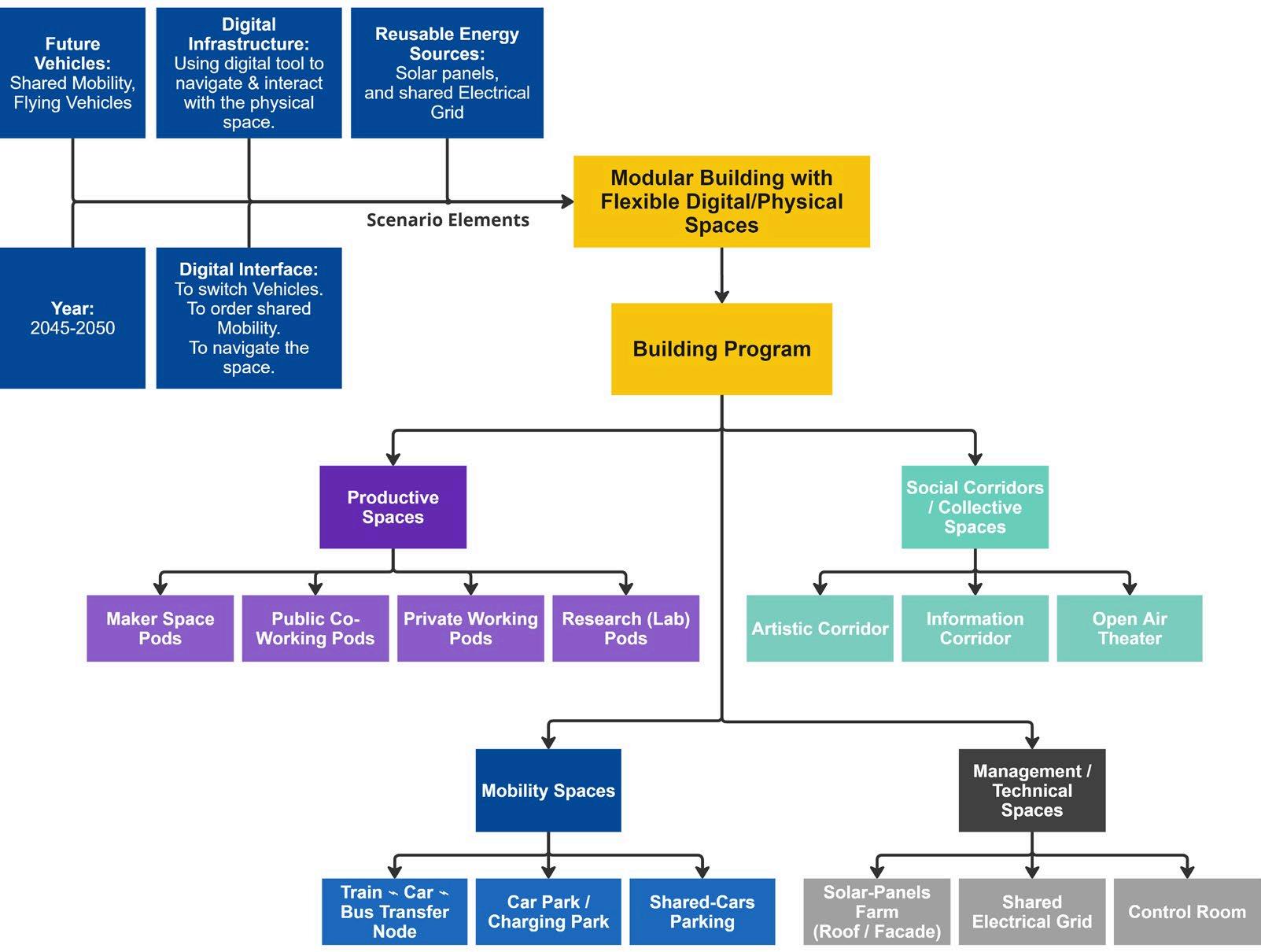
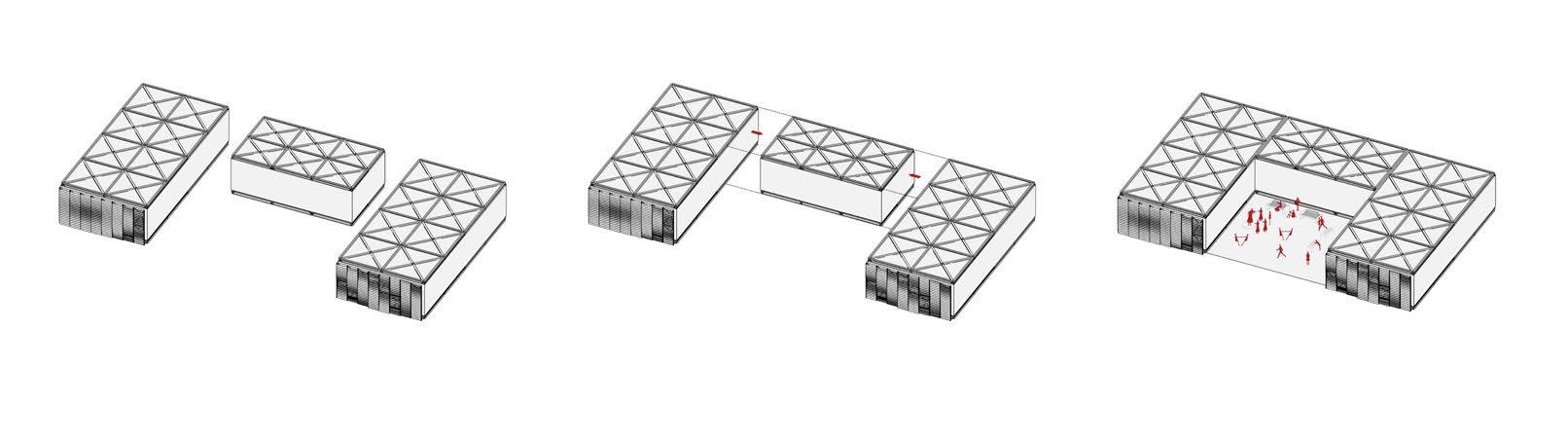
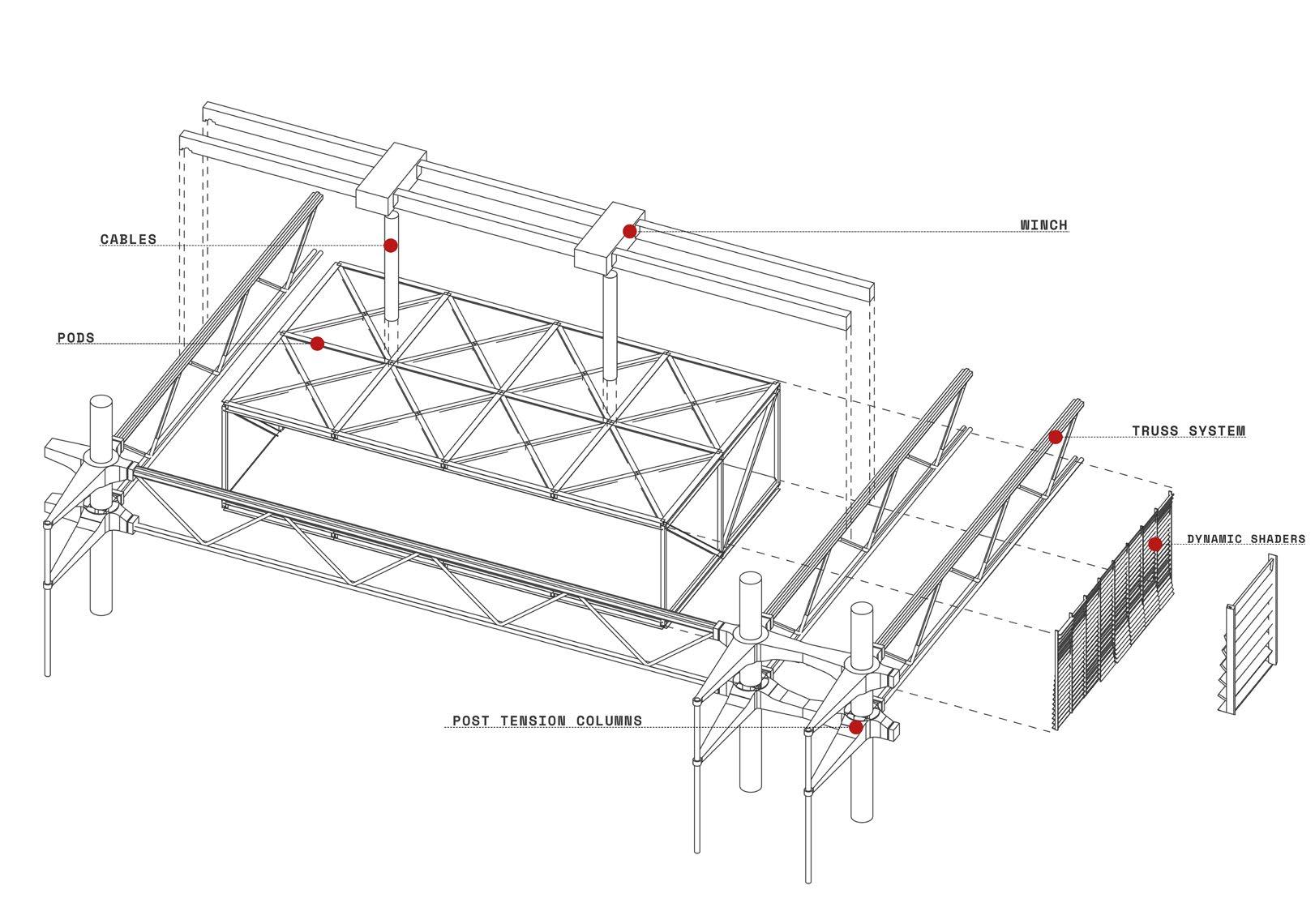
The project’s modular approach emphasizes adaptability and flexibility, enabling rapid assembly, expansion, and customization based on evolving urban needs. Modules can vary in configuration, allowing diverse functions such as public working spaces, private pods, and research labs, supporting dynamic community engagement and productive environments.
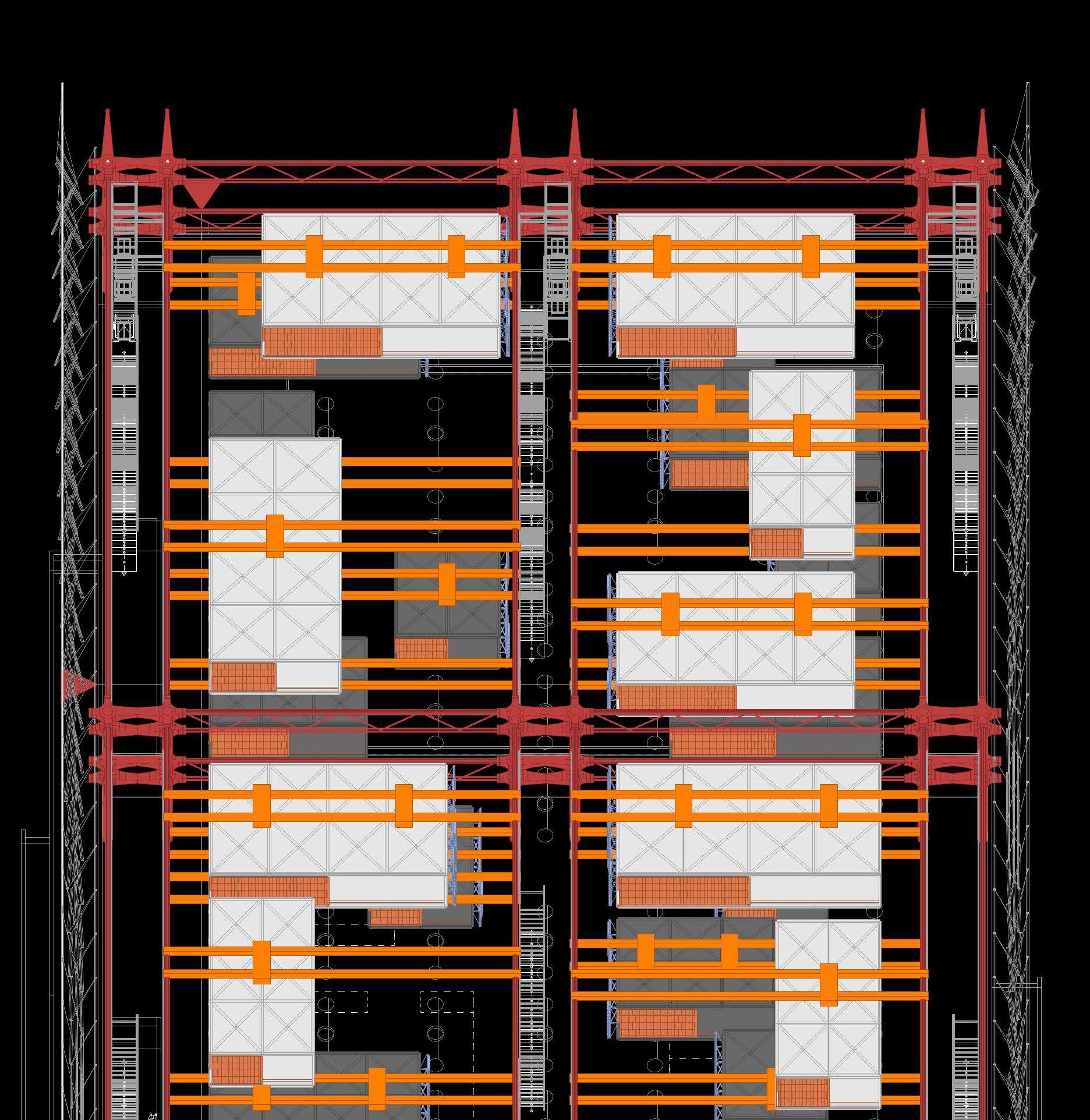
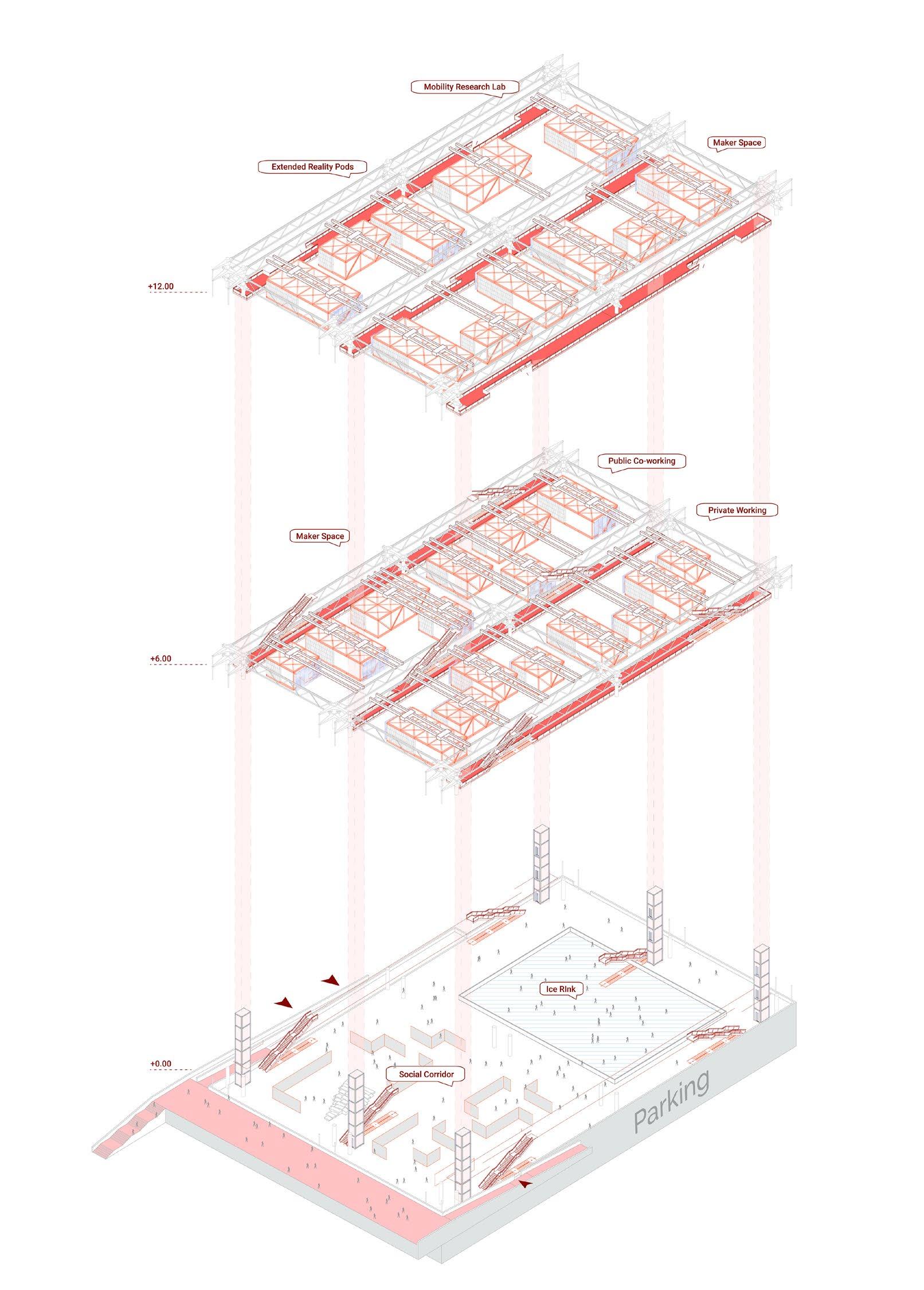
The detailed structural diagram showcases the innovative construction approach, emphasizing modular, adaptable frameworks that integrate digital infrastructure and physical space. This method ensures scalability and flexibility, essential for responding effectively to evolving urban demands and technological advances.
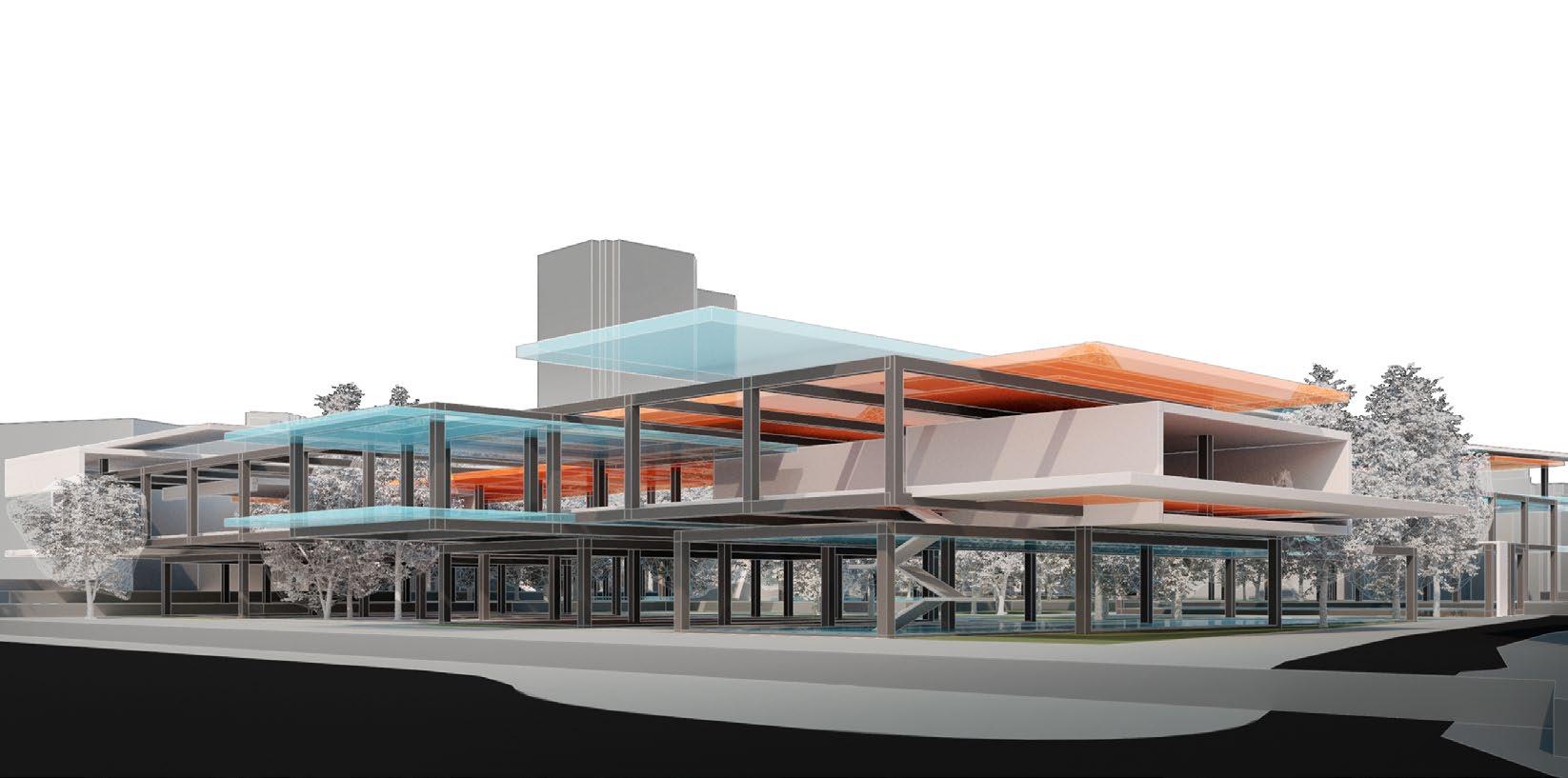
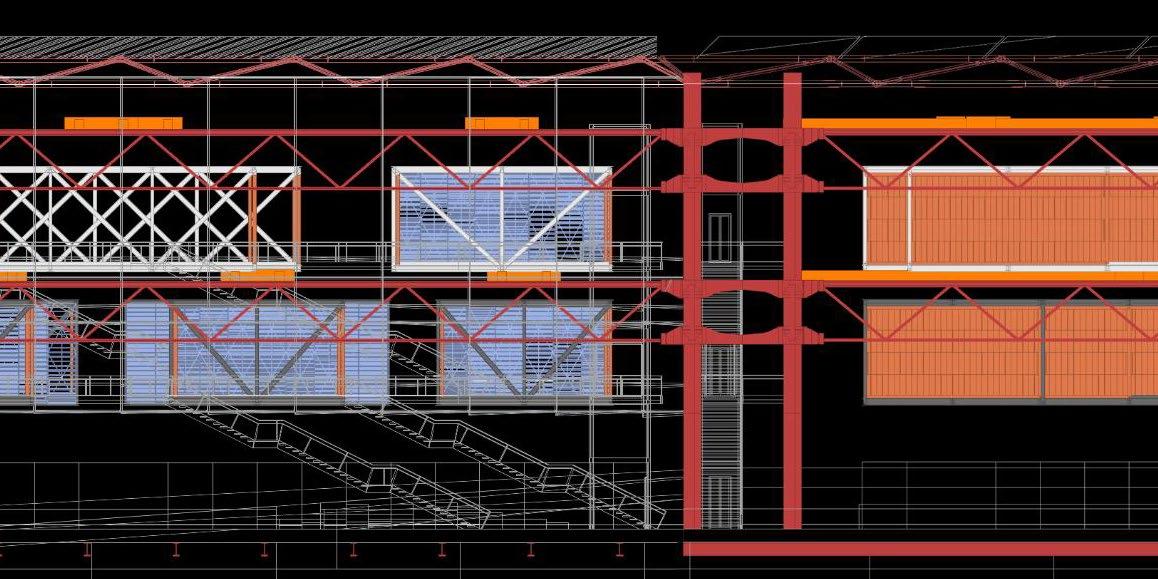
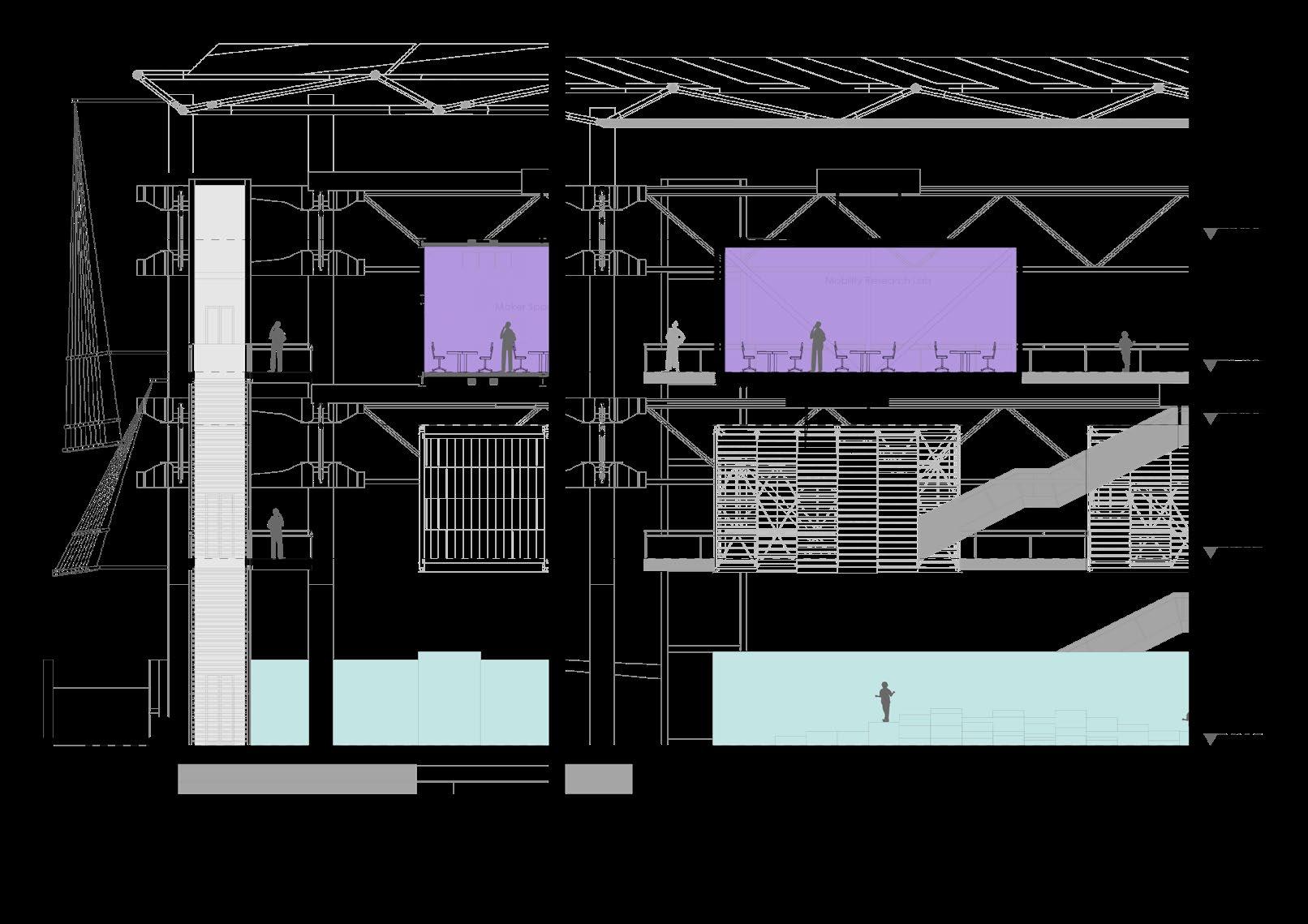
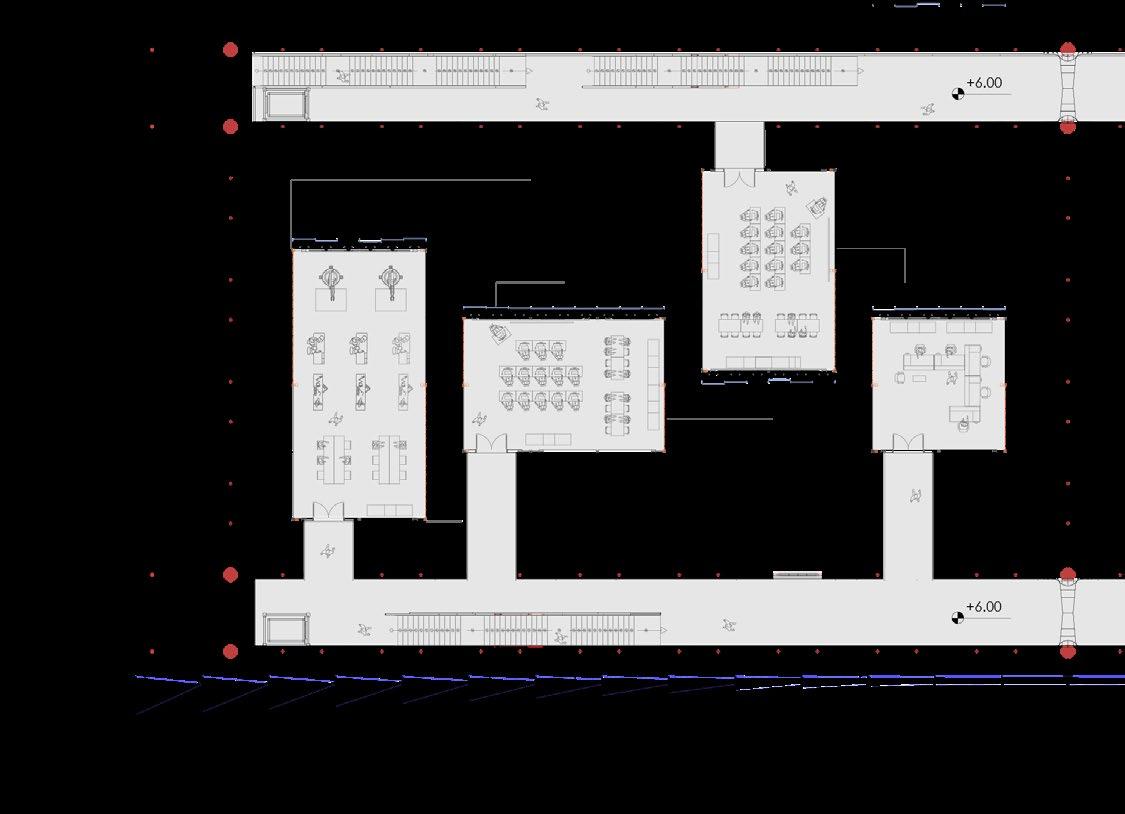
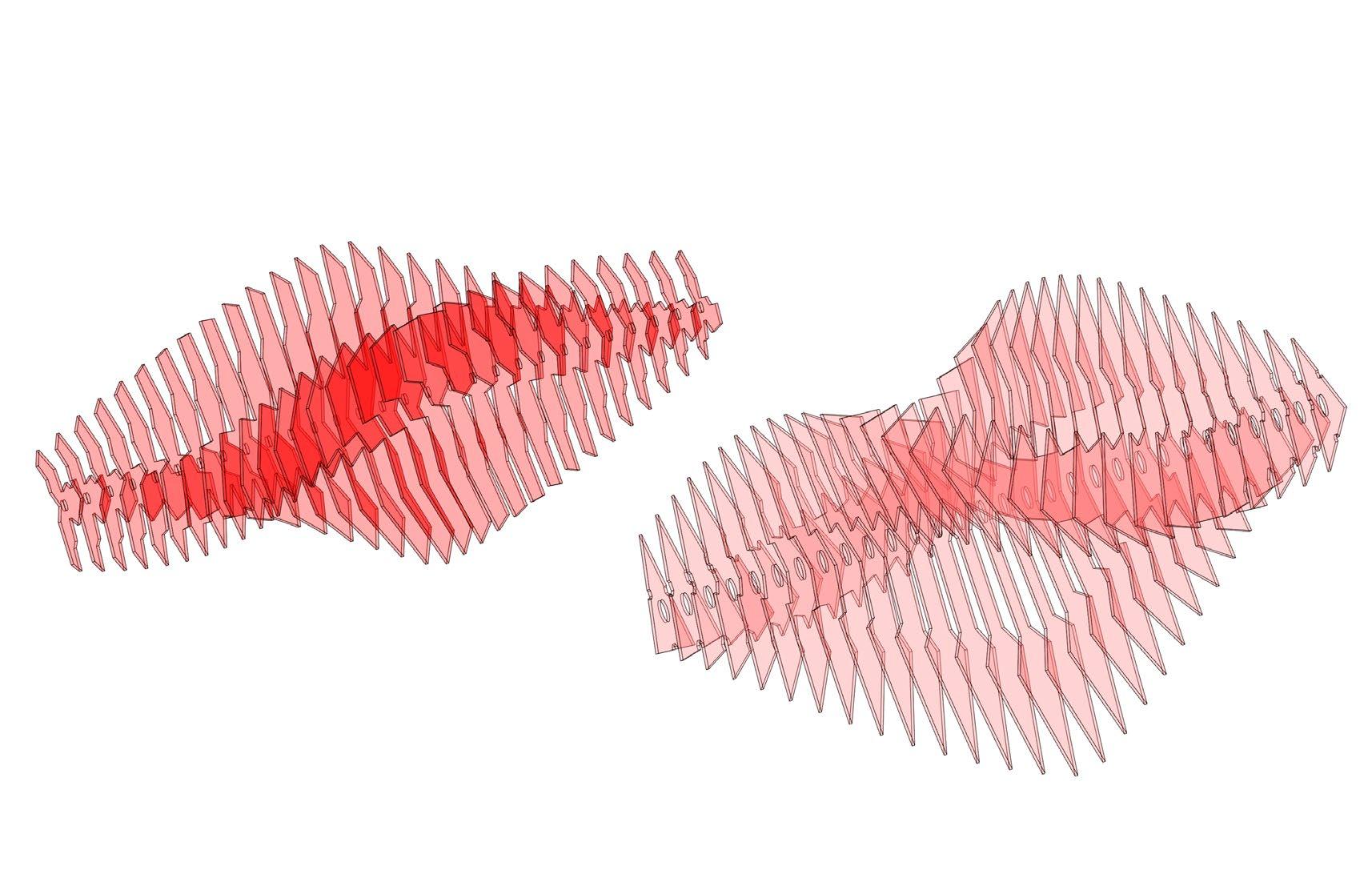
The detailed architectural sections illustrate the layered spatial configuration within the Plug_In District, emphasizing multifunctionality and interaction. Spaces dedicated to mobility seamlessly integrate with social corridors, fostering adaptable environments that respond to community needs and technological innovations.
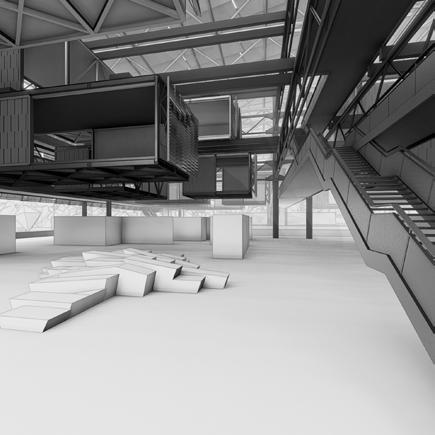
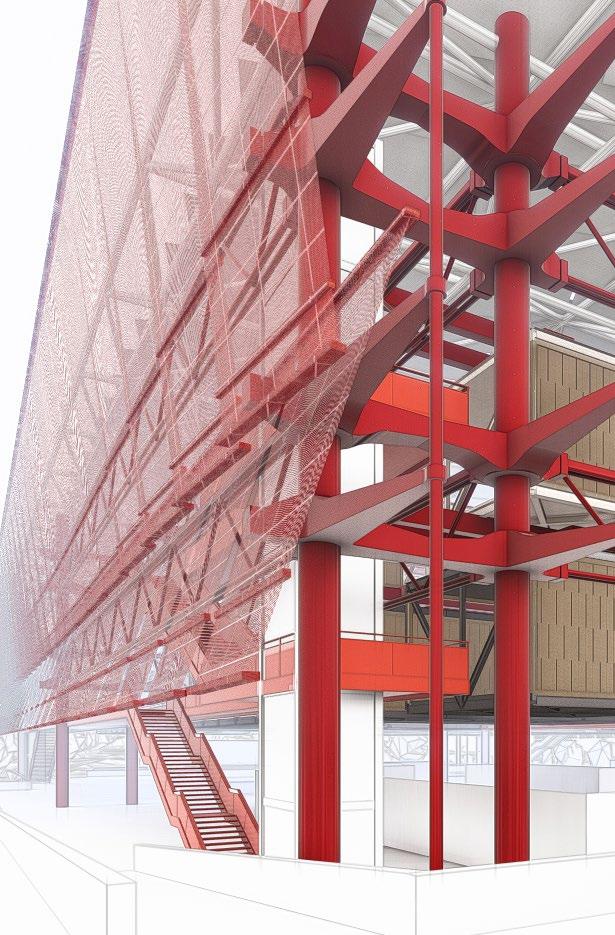
The rendered visualizations showcase the integration of phygital elements within the architectural fabric. Transparency, modularity, and the incorporation of digital interfaces create an immersive and dynamic environment, inviting user interaction and enhancing the urban experience through blended digital-physical engagements.
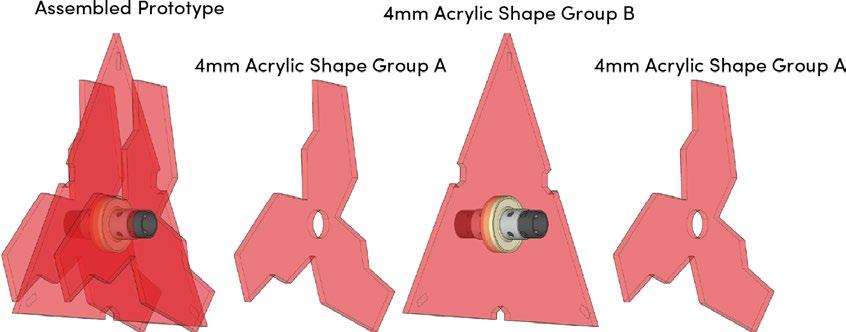
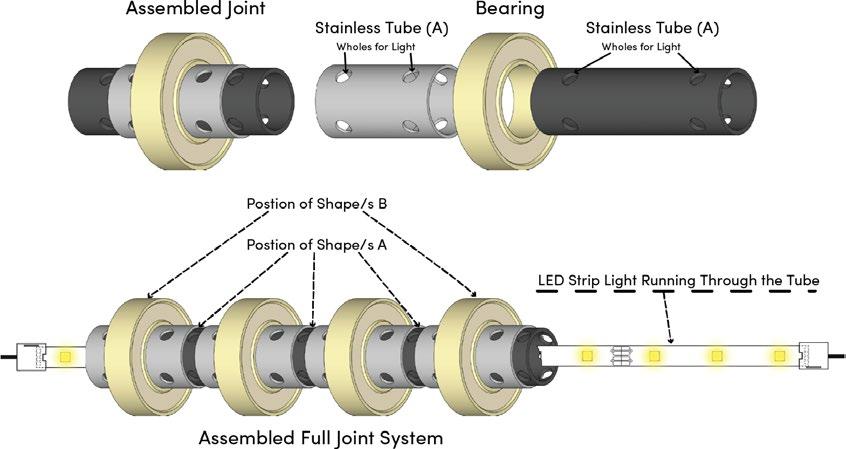
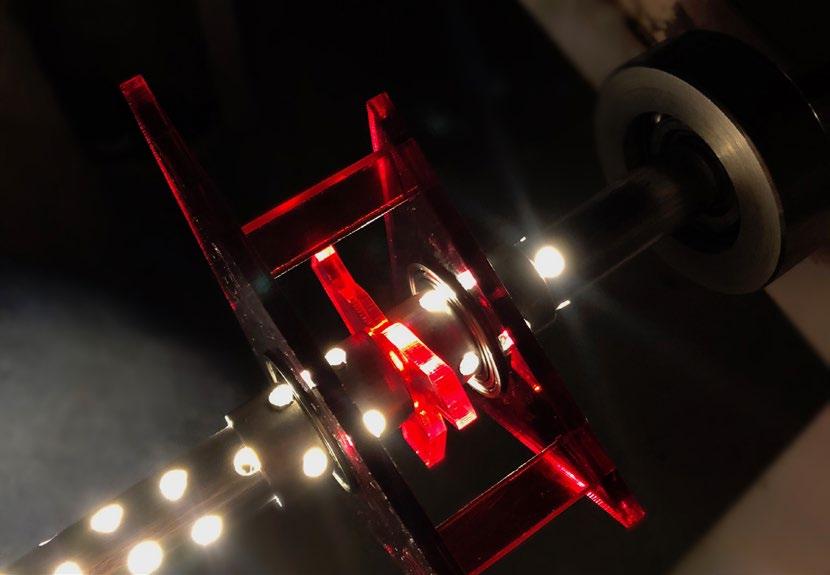
Lighting the project was designed in a way that we could use any type of cheap LED light that we could run through the tube, since we made the wholes in the tube, light shining bright and sharp through the Acrylic.
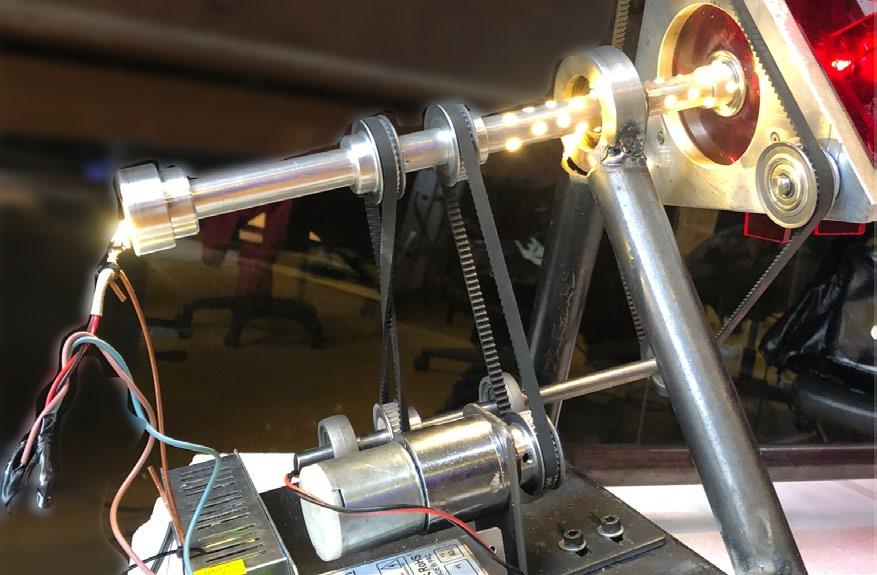
For the rotation of the geometry, our goal was to have the first Group of Shapes rotate in the opposite direction to the 2nd group of shapes, we made the first group rotate freely on a ball-bearings then connect all of them with small Acrylic studs that at the end connect to a metal plate, and then use that plate to rotate the whole “A” Group.
The 2nd group of shapes was fitted with friction to the tube, fitted between the first group, and then just connected the tube to a DC motor to rotate the 2nd group.
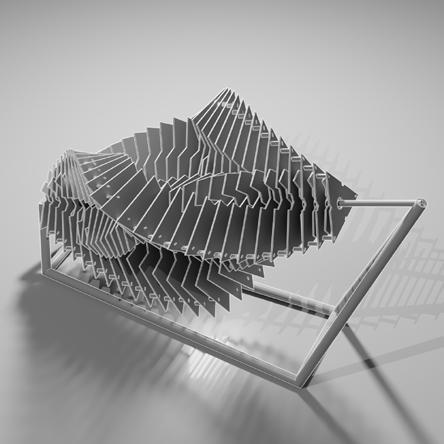
By changing a triangle to an 18-sided polygon and adding a scale factor that decreases the length of the shape by 3.5 CM every step-down,
while at the same time adding 5 degrees offset rotation creates a single curve helix, then applying all of those rules again on the 2nd group of shapes to create a completely different design creates a double curve helix.
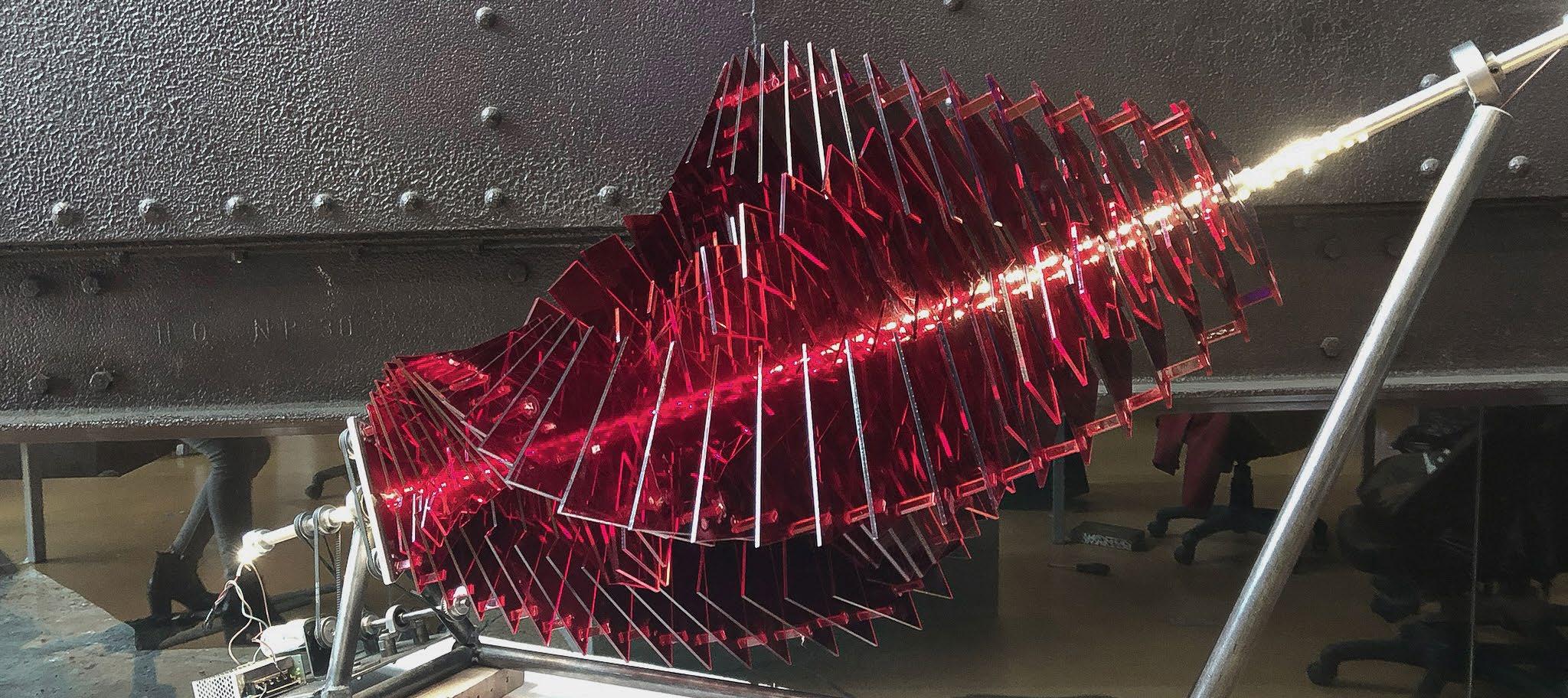
With the use of Light and Motion and putting into use what we have done with our Geometry, we achieve a Growing illusion that is highlighted with the use of Acrylic and Light shining inside of the
acrylic creating a glowing edge effect.
The Final Project was presented at the final bigjury for the Basic-Design Studio Fall 2019.
The design endeavors have resulted in a highly consistent system that has the capability to generate patterns and effects that are only possible through the continuous interaction of moving elements and light. This unique quality is a testament to the meticulous attention to detail and the visionary approach that went into the design process.
Project Type Academic Undergraduate
Studio Type
Date
DigitalFutures Workshop
2th Year Summer 2021
Location Istanbul, Türkiye
FRACTUM
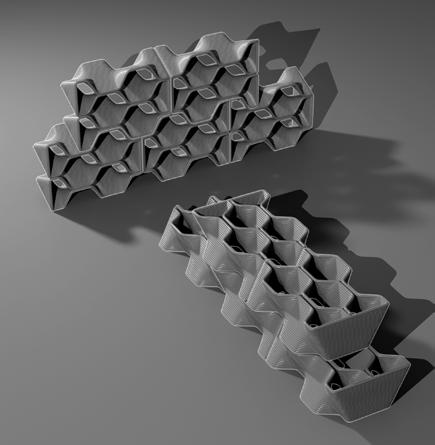
3D PRINTING & NODE MODELING FOR LIGHTWEIGHT STRUCTURES
Mathematical and geometric shapes are key to achieving lightweight structures. Triangles, hexagons, and tetrahedrons offer inherent stability and load-bearing capabilities. Grid systems and optimization algorithms optimize structural efficiency and minimize material usage. Tensegrity structures combine mathematical principles and geometric shapes to create lightweight, visually striking designs. By leveraging these approaches, architects and engineers can develop strong, efficient, and sustainable structures.
Mathematical and geometric shapes are key to achieving lightweight structures. Triangles, hexagons, and tetrahedrons offer inherent stability and load-bearing capabilities. Grid systems and optimization algorithms optimize structural efficiency and minimize material usage.
ECAADE 2025 SPACE-FILLING POLYHEDRAL PAVILION
Project Type
Studio Type
Date
Academic Postgraduate
3rd Semester Fall 2025 - Ongoing Research Project
Location Istanbul, Türkiye
STUDIO HOUSING PROJECT
DESIGNED FOR ARTISTS
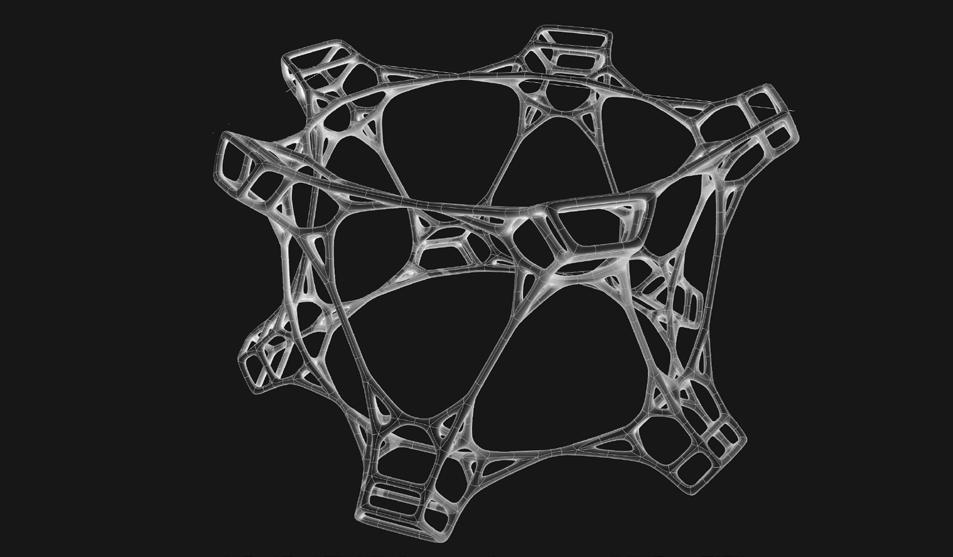
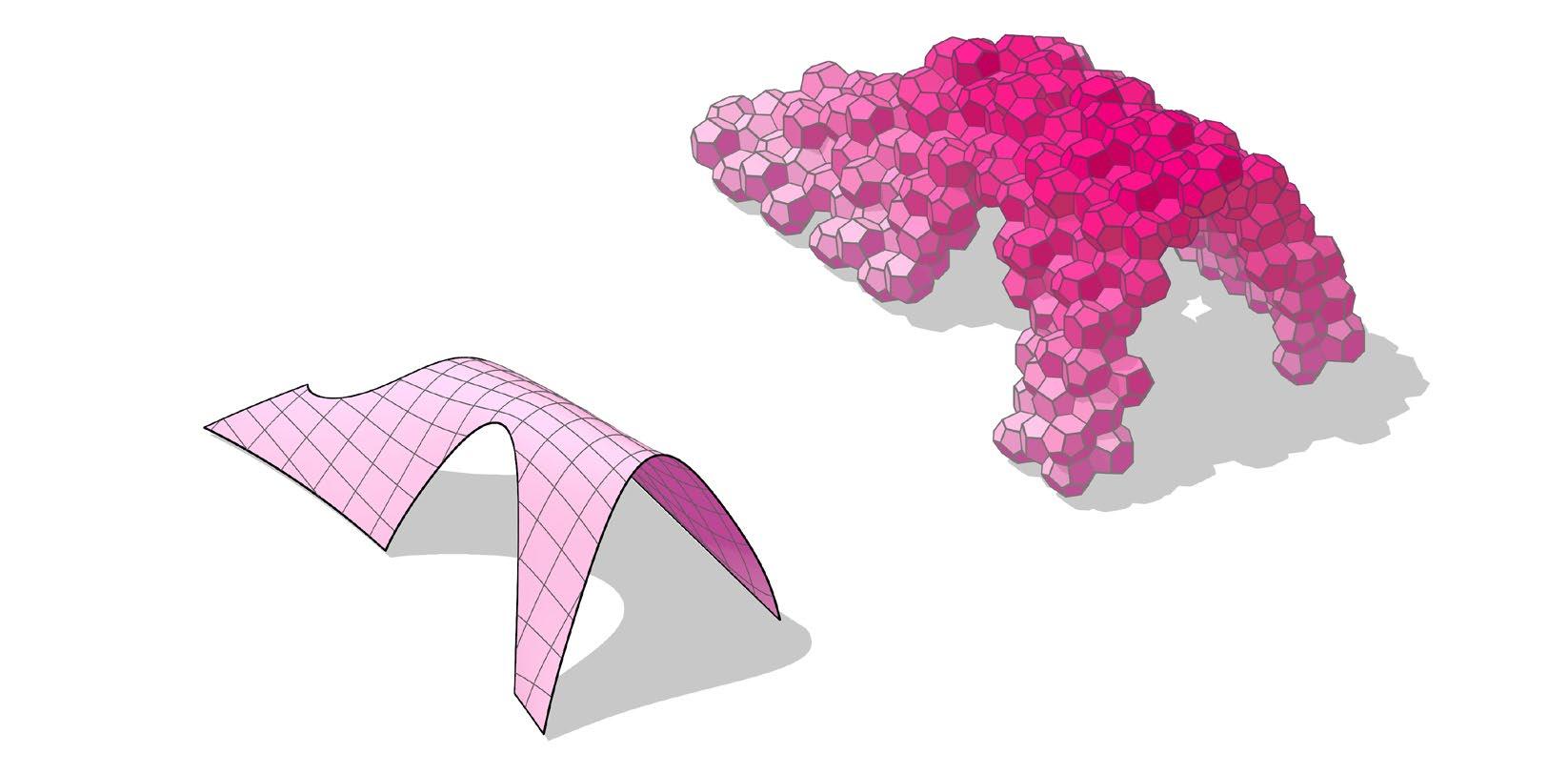
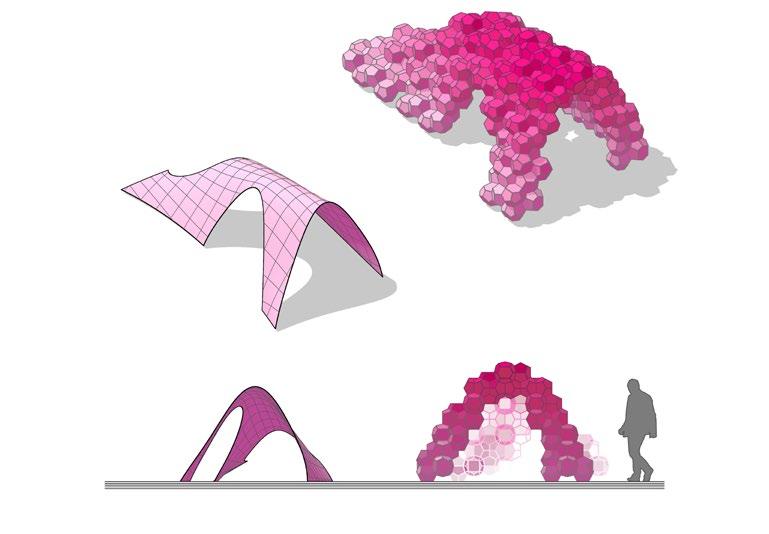
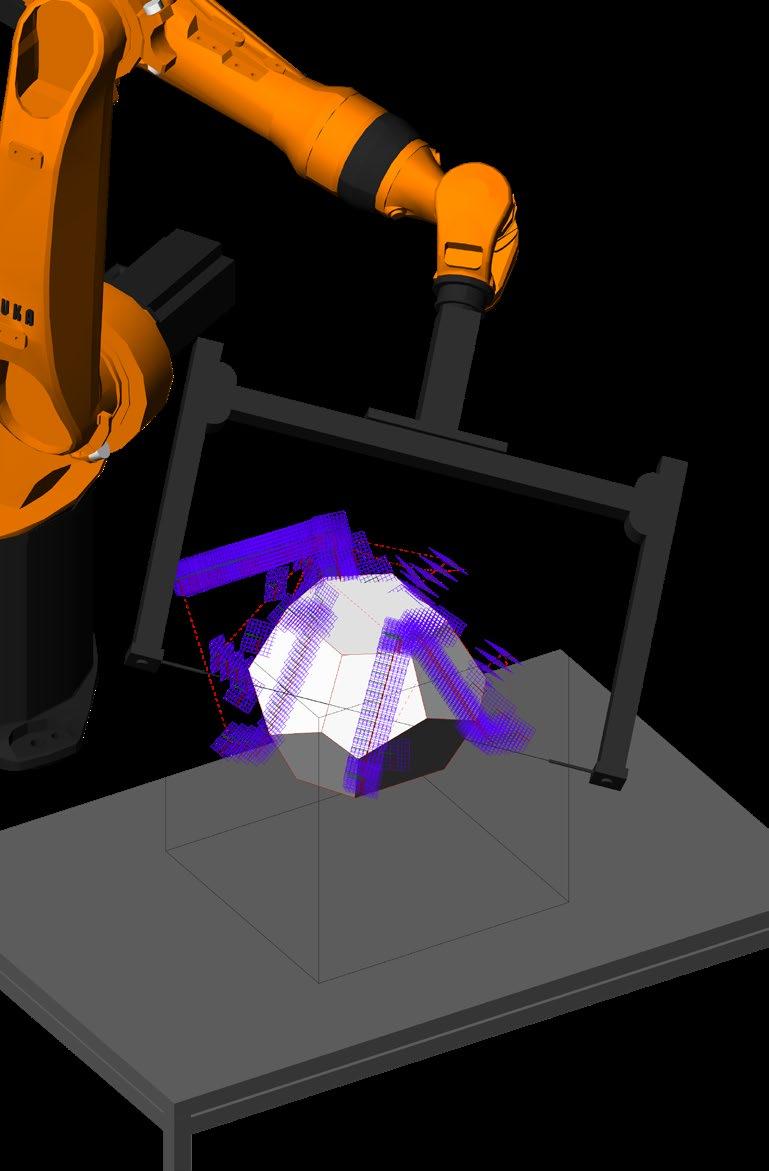
This project investigates the application of space-filling polyhedra, specifically the Weaire-Phelan structure, in architectural construction through parametric modeling and robotic fabrication methods. Inspired by geometric efficiencies exemplified in iconic structures such as the Water Cube (2008 Beijing Olympics), the study develops a pavilion using modular polyhedral units. The research integrates digital design and robotic manufacturing, employing EPS foam as a material due to its lightweight, cost-effectiveness, and suitability for robotic hot-wire cutting.
Project Advisor: Prof. Tuğrul Yazar
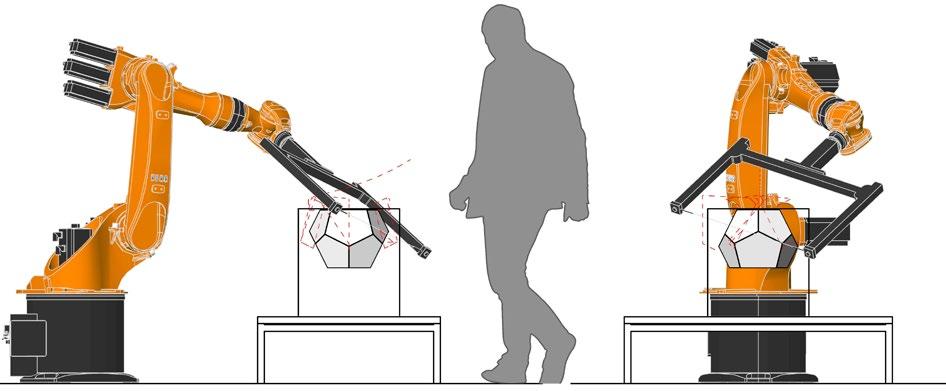
Utilizing Rhinoceros 3D and Grasshopper software with plugins such as Wasp and Kangaroo, the project demonstrates a sophisticated workflow from parametric modeling to physical prototyping. Ultimately, the study showcases a scalable design methodology and addresses practical considerations like structural integrity, fabrication accuracy, and material constraints, highlighting the future potential of computational design in architecture.
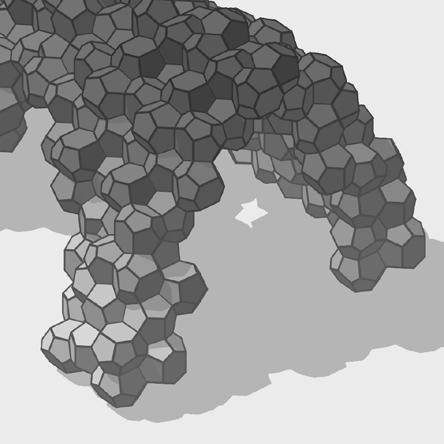
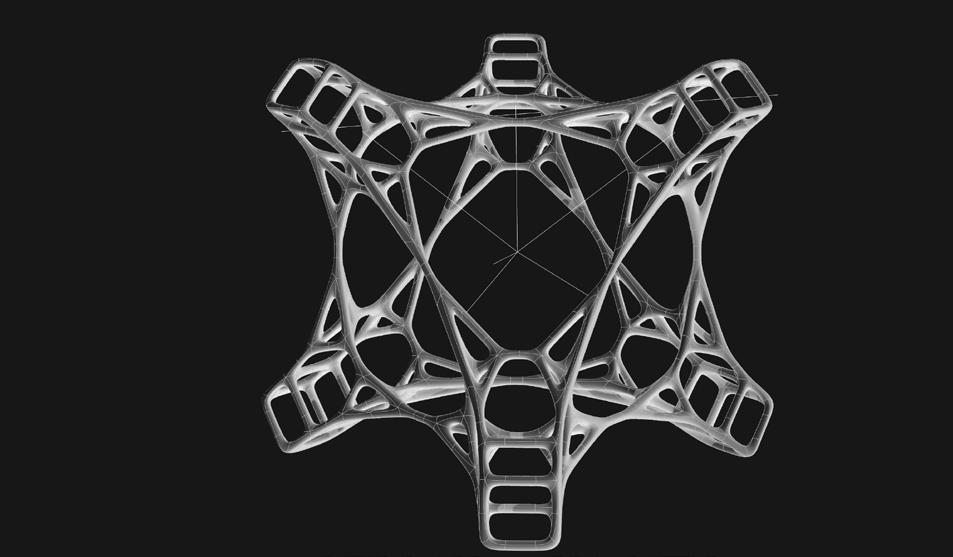
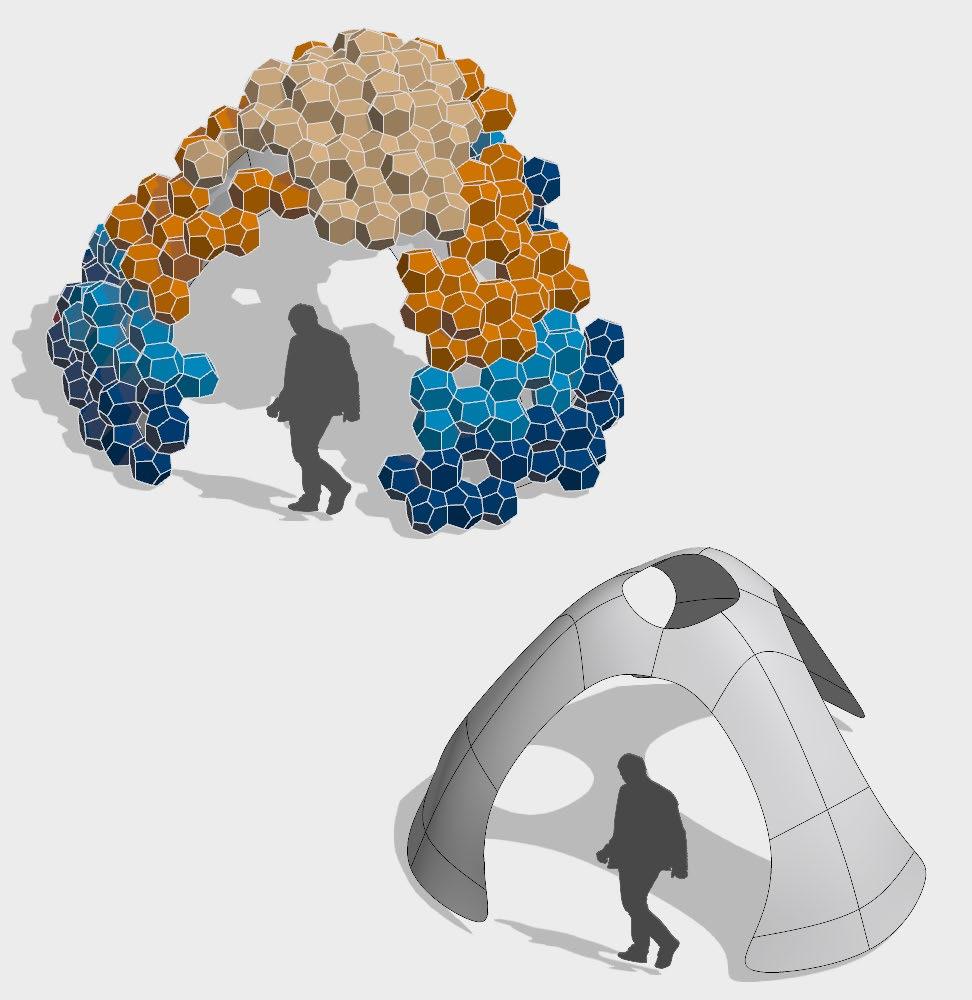
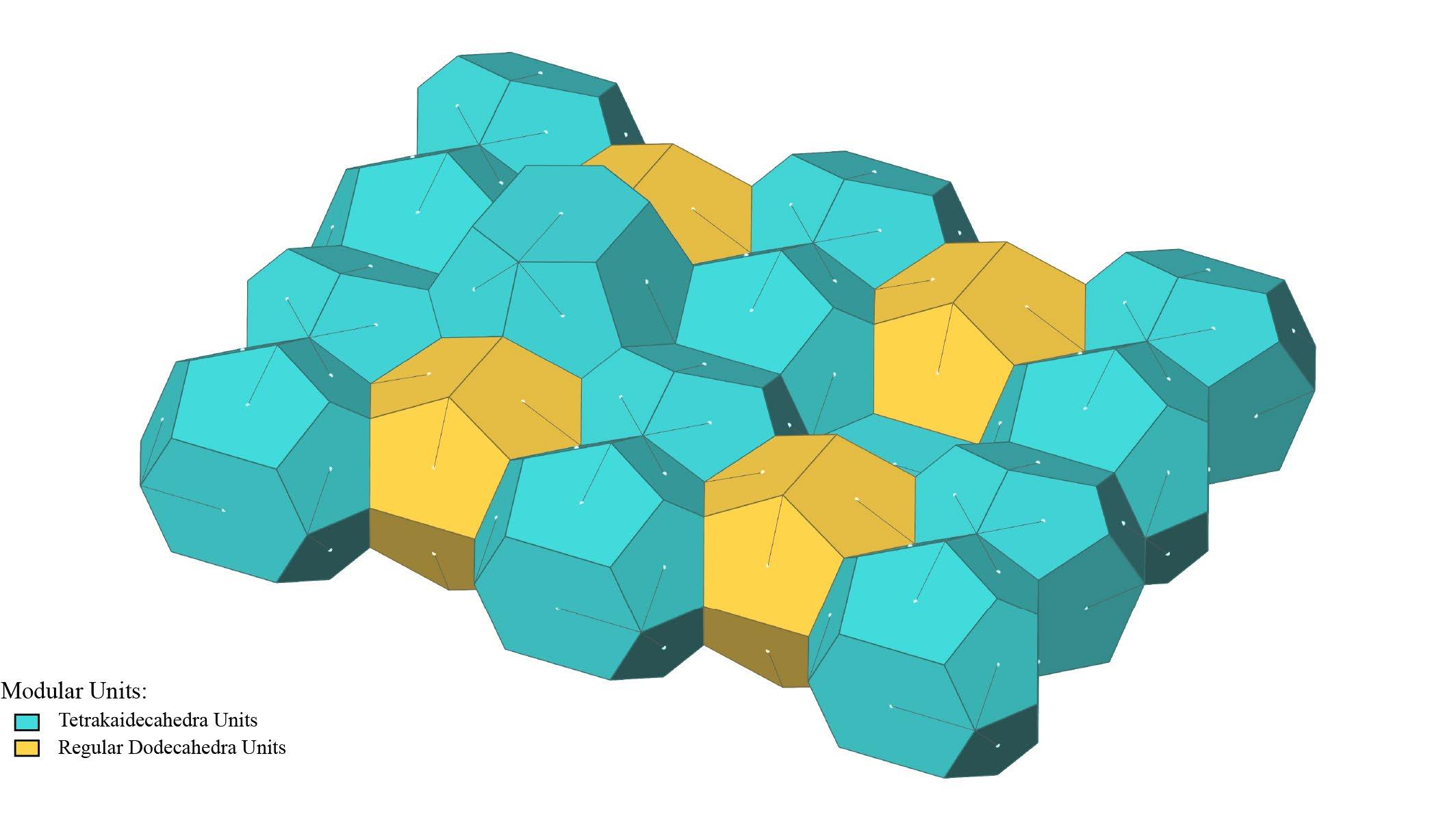
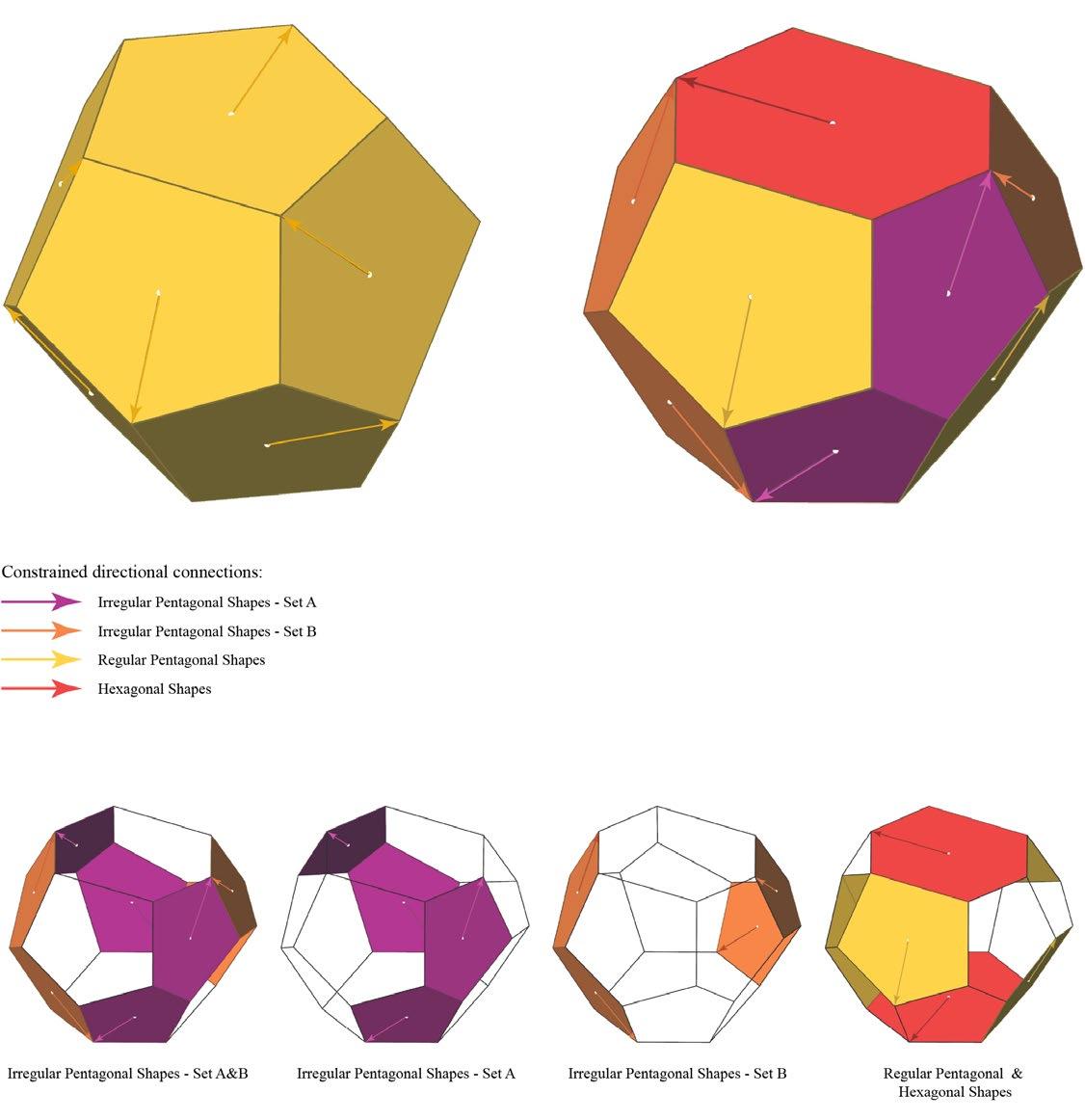
The pavilion’s design utilizes modular units derived from the Weaire-Phelan structure, combining Tetrakaidecahedra and Regular Dodecahedra to efficiently fill space without gaps.
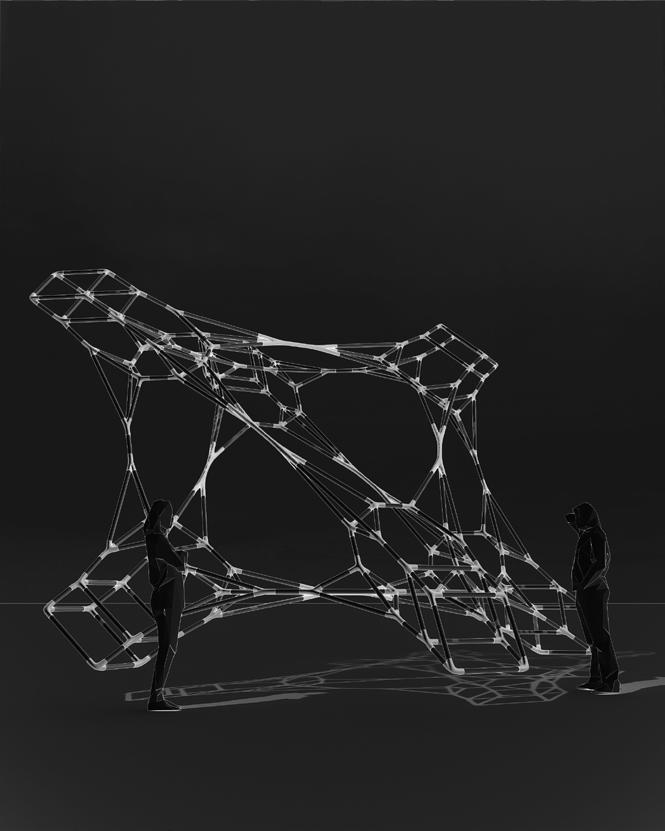
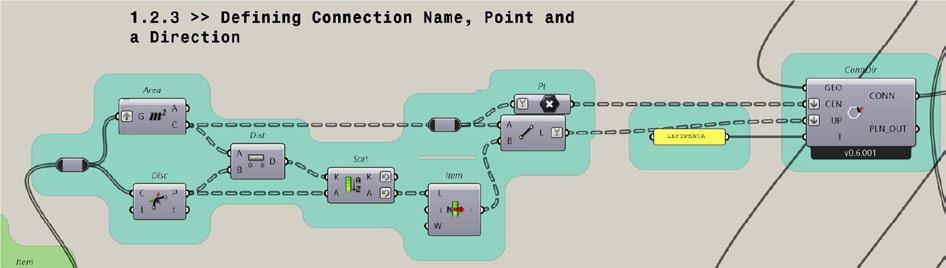
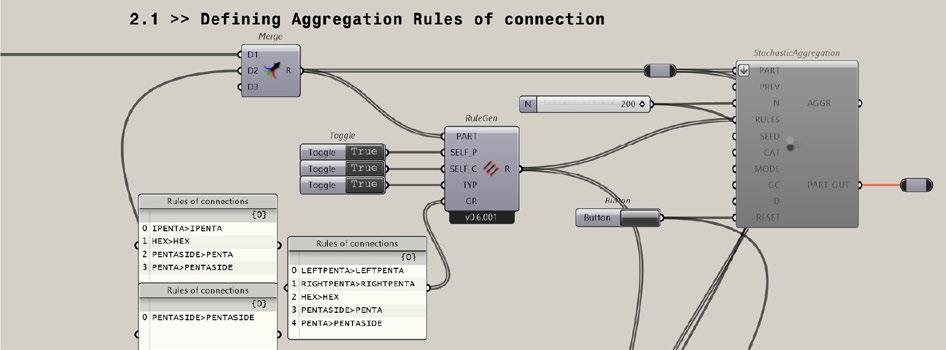
Parametric modeling in Grasshopper enables precise definition of connection points and directions, ensuring seamless translation from digital models to robotic fabrication.
The geometric logic employs specific directional connections, ensuring structural integrity through precise alignment of hexagonal, pentagonal, and irregular pentagonal faces.
Robotic hot-wire cutting tool paths are meticulously generated and tested digitally, optimizing the fabrication of EPS foam units and reducing material waste.
Tutorship
ROBOTIC EARTHCRAFTS II
Istanbul, Türkiye ROBOTIC FABRICATION, COMPUTATIONAL DESIGN, AND RAMMED-EARTH FOR SUSTAINABILITY Workshop Summer 2024
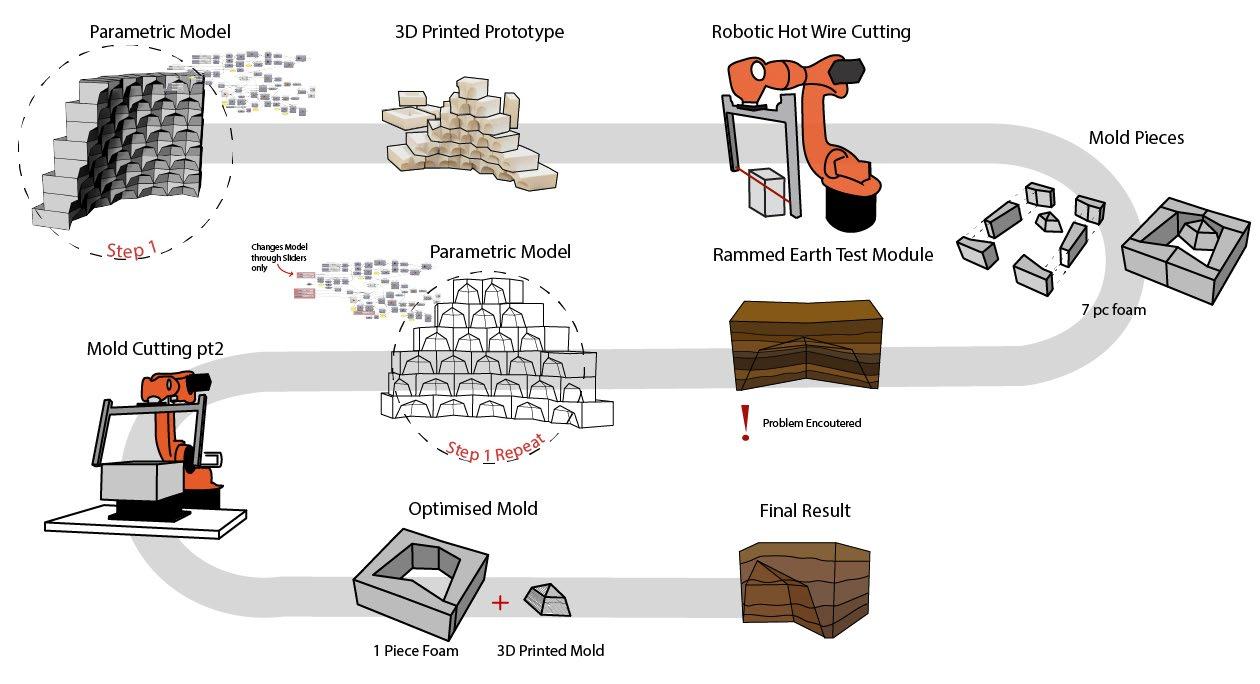
The project, titled “Robotic EarthCrafts 2,” undertaken at Istanbul Bilgi University, explores robotic-assisted construction by integrating traditional earthen-building techniques with contemporary computational design methods. Its primary objective is to utilize biological additives in rammed-earth structural elements, ensuring enhanced sustainability in design and production processes. Through computational modeling and robotic fabrication, the project delivers environmentally conscious and structurally efficient design solutions. The final proposal consists of a parametric, compressed earth-block structure, envisioned as both a freestanding podium and a small stage in the campus garden, demonstrating sustainable architecture’s potential through innovative robotic fabrication.
Project Team Members:
Tuğrul Yazar
Fulya Özsel Akipek
Nilüfer Kozikoğlu
Abdullah Mallah
Halit Mallah
Participants:
Berivan Güzel
Eman Ahmed
Furkan Çetinel
Gülçin Özen
Hammam Alhwid
Juna Alturck
Meryem Yılmaz
Pınar Kahya
Rand Damlakhi
Rayan Ebrahim
Seda Zafer Küçük
Sema Bartan
Sevde Boztepe Dinçer
Şevval Kara
Zeynep Acar
Zeynep Gökkaya
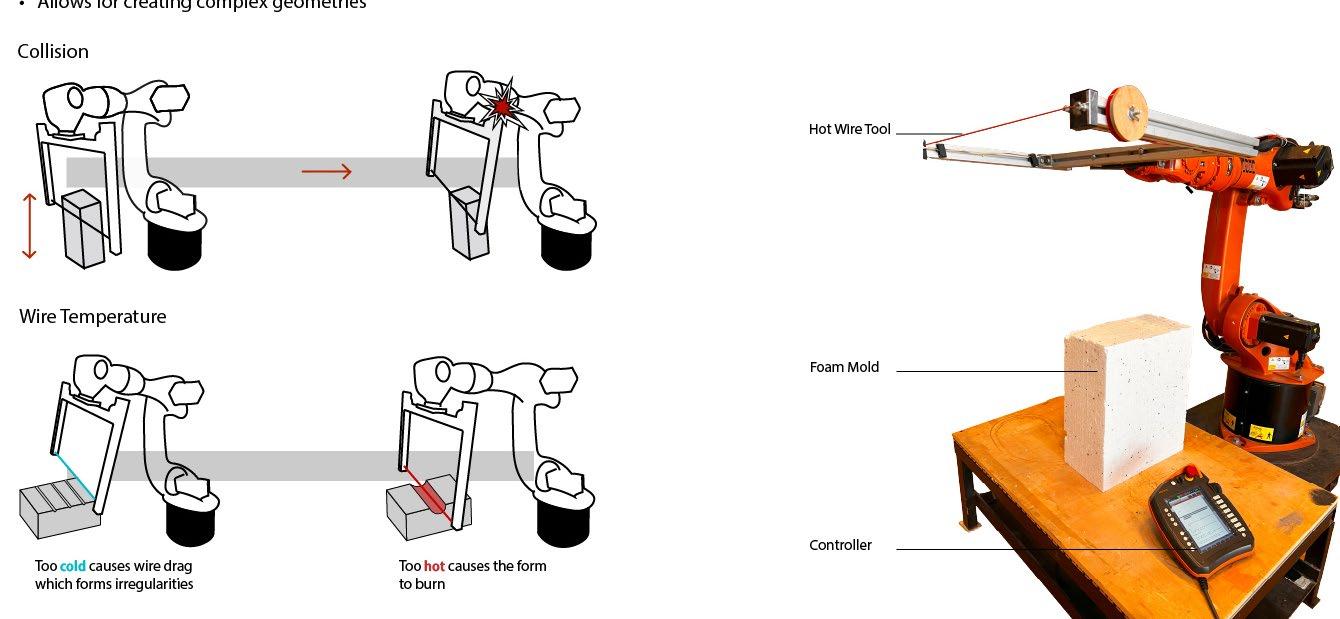
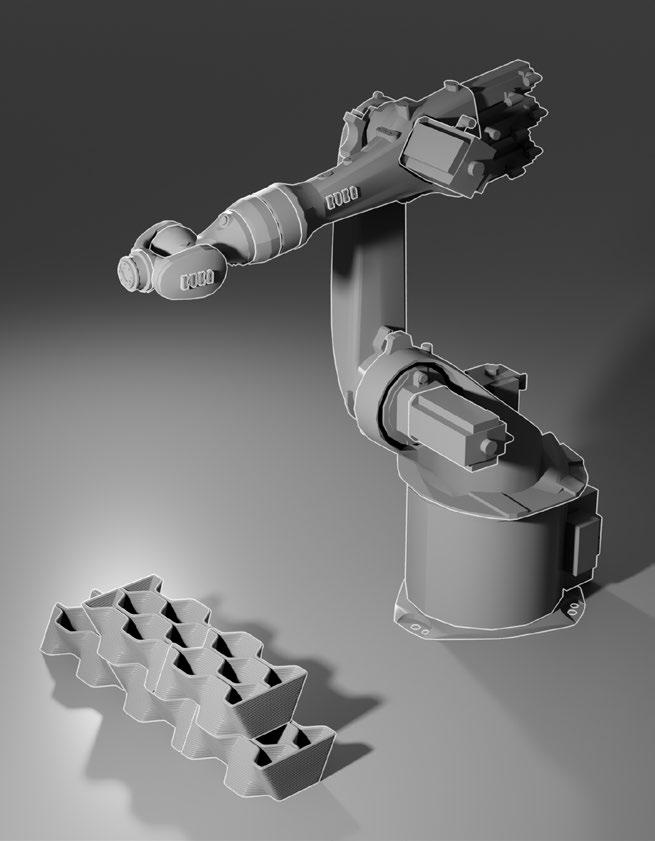
The robotic arm equipped with a hotwire cutter precisely shapes molds from foam blocks. Accurate control allows complex geometries derived from parametric models to be rapidly prototyped, facilitating efficiency in mold production.
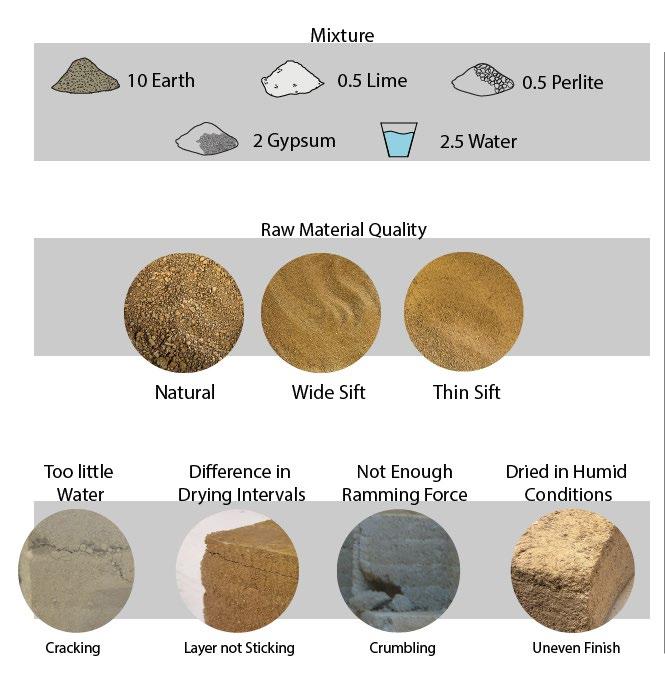
Various mixtures were tested, incorporating proportions of earth, lime, gypsum, pellets, and water. Material samples were assessed for their consistency, structural strength, and drying characteristics, ensuring suitability for robotic earth construction.
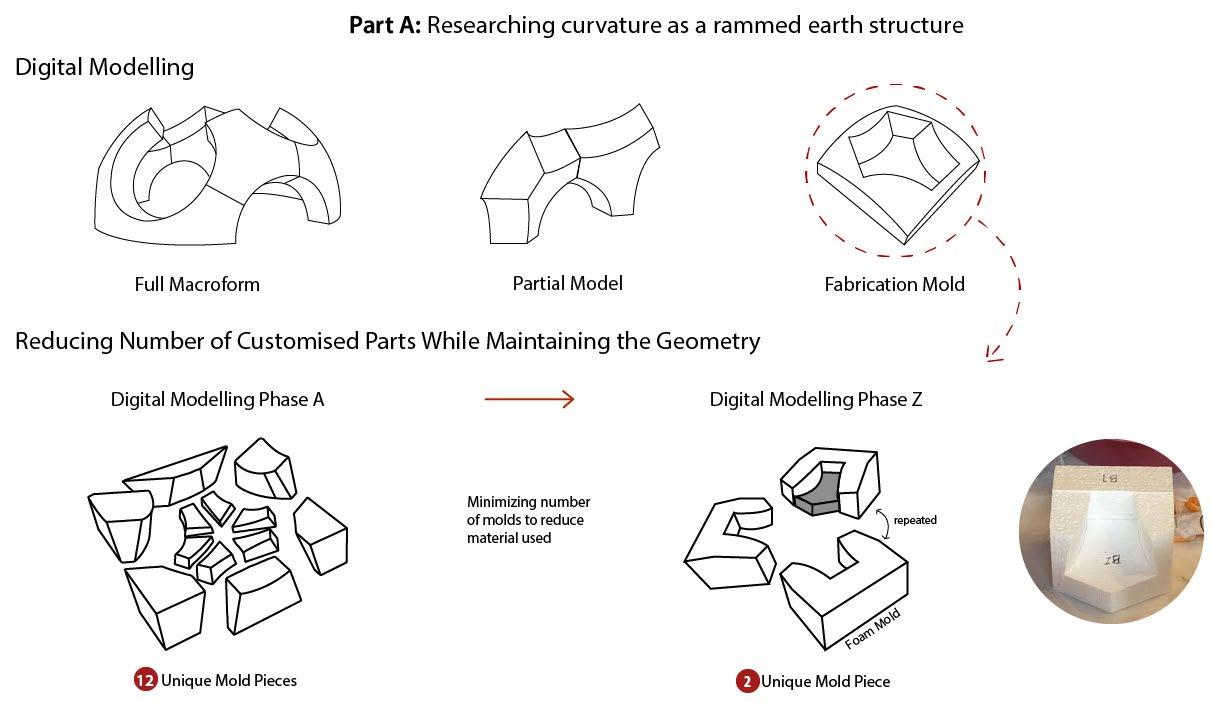
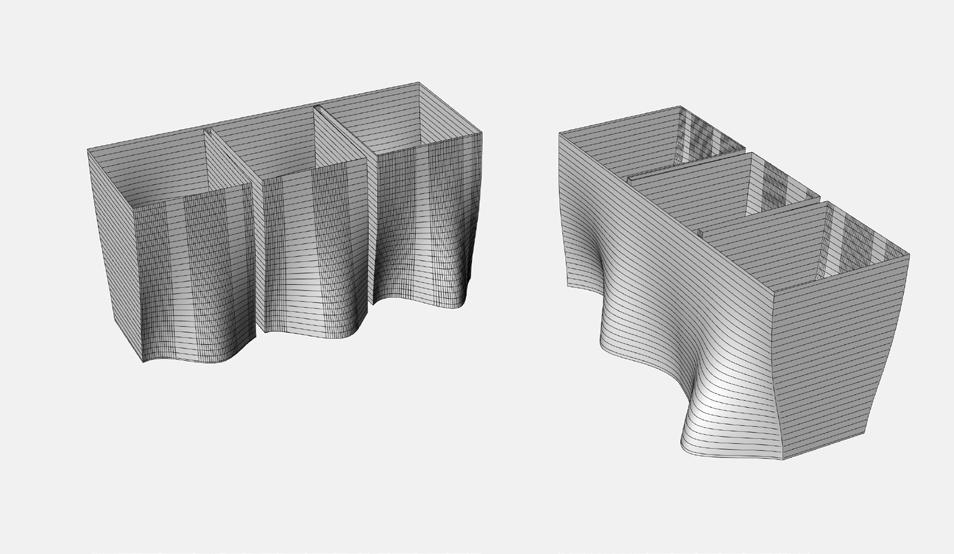
The digital modeling process utilized Grasshopper to parametrically derive mold geometries based on traditional muqarnas patterns. Optimization techniques reduced mold complexity by minimizing the number of unique components, balancing geometric accuracy and fabrication efficiency.
Physical outcomes from the hotwire-cut foam molds validated the effectiveness of robotic fabrication in accurately translating digital models into physical forms. The process confirmed feasibility for precisiondriven sustainable construction using compressed earth materials.
Illustration depicting the project’s digital-to-physical workflow, including parametric modeling, 3D printing, robotic hotwire cutting, mold assembly, and rammed-earth testing. The process highlights iterative optimization to achieve the final sustainable earth-block structure.
Workshop participants collaboratively preparing and mixing earthen materials enhanced with biological additives. This mixture, carefully balanced to optimize structural strength and sustainability, was essential for effective robotic rammedearth construction.
A detailed view of the assembled mold, demonstrating precision assembly and accurate alignment required for the compressed earth components. The modular mold design ensures structural accuracy and ease of disassembly post-production.
Successfully fabricated rammed-earth blocks, showcasing the material’s texture, integrity, and consistency resulting from robotic fabrication methods. These prototypes exemplify the practical viability and aesthetic potential of computationally designed earth-based construction techniques.
Project Type Academic Undergraduate
Studio Type
Date
Robotic Fabrication
3th Year Fall 2021
Location Istanbul, Türkiye
ROBOTIC FABRICATION
ADOBE BRICK PRINTING
TESTING CLAY MIXTURES & GEOMETRY
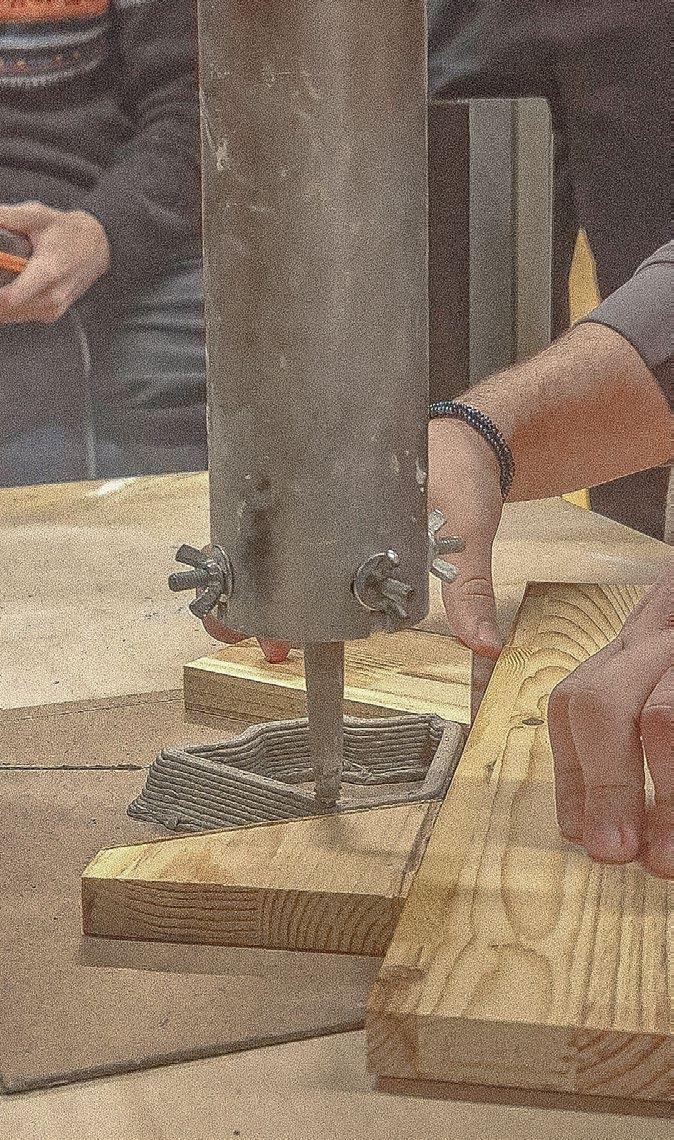
The project involved exploring additive clay manufacturing and utilizing a Robotic arm, specifically a Kuka, for 3D printing. The primary objective was to gain knowledge and understanding of these technologies. Geometry exploration and prototyping played a crucial role, allowing for a deeper understanding of the material properties of clay. By experimenting with different geometries, the project aimed to uncover the capabilities and limitations of clay as a medium. This hands-on approach provided valuable insights into the potential applications and possibilities of additive clay manufacturing, paving the way for further innovation in the field.
We used powder clay mixed with water to produce a mix that was hard but easy to print.
Based on the geometry and the ratio of water and clay, the printed geometry either succeed or failed.
Even though we modeled everything perfectly, the technical issues in real life were the main issue here to focus on. Either too much water and it failed or too much/ too little air pressure and it couldn’t print.
After we successfully determined the optimal mixture parameters and geometric dimensions, we progressed to the second phase of our project. In this phase, we focused on testing the printing of clay with support, which we added during the printing process.
Printing with support was a crucial step in ensuring the stability of the clay during the printing process. By adding support, we were able to achieve a more precise and accurate print, which ultimately improved the quality of our final product.
Through careful testing and experimentation, we were able to refine our printing process and achieve exceptional results. Our success in this phase of the project was a testament to the importance of precision and attention to detail in the additive manufacturing process.
In the final phase of our project, we printed multiple versions of the brick to explore different options and refine our design. We printed some bricks with support to ensure stability during the printing process, while others were printed without support to test their structural integrity.
One of the key features of our brick design was modularity. Each brick part was carefully designed to fit together seamlessly, allowing for the construction of partitions or columns with ease. By printing multiple versions of the brick, we were able to refine the modular design and ensure that each part fit together perfectly.
Through extensive testing and experimentation, we were able to create a highquality, modular brick design that met our design objectives. Our success in the final phase of the project was a testament to our team’s dedication to precision and attention to detail.
Project Type Academic Undergraduate
Responsive Environments
4th Year Spring 2023
Location Istanbul, Türkiye
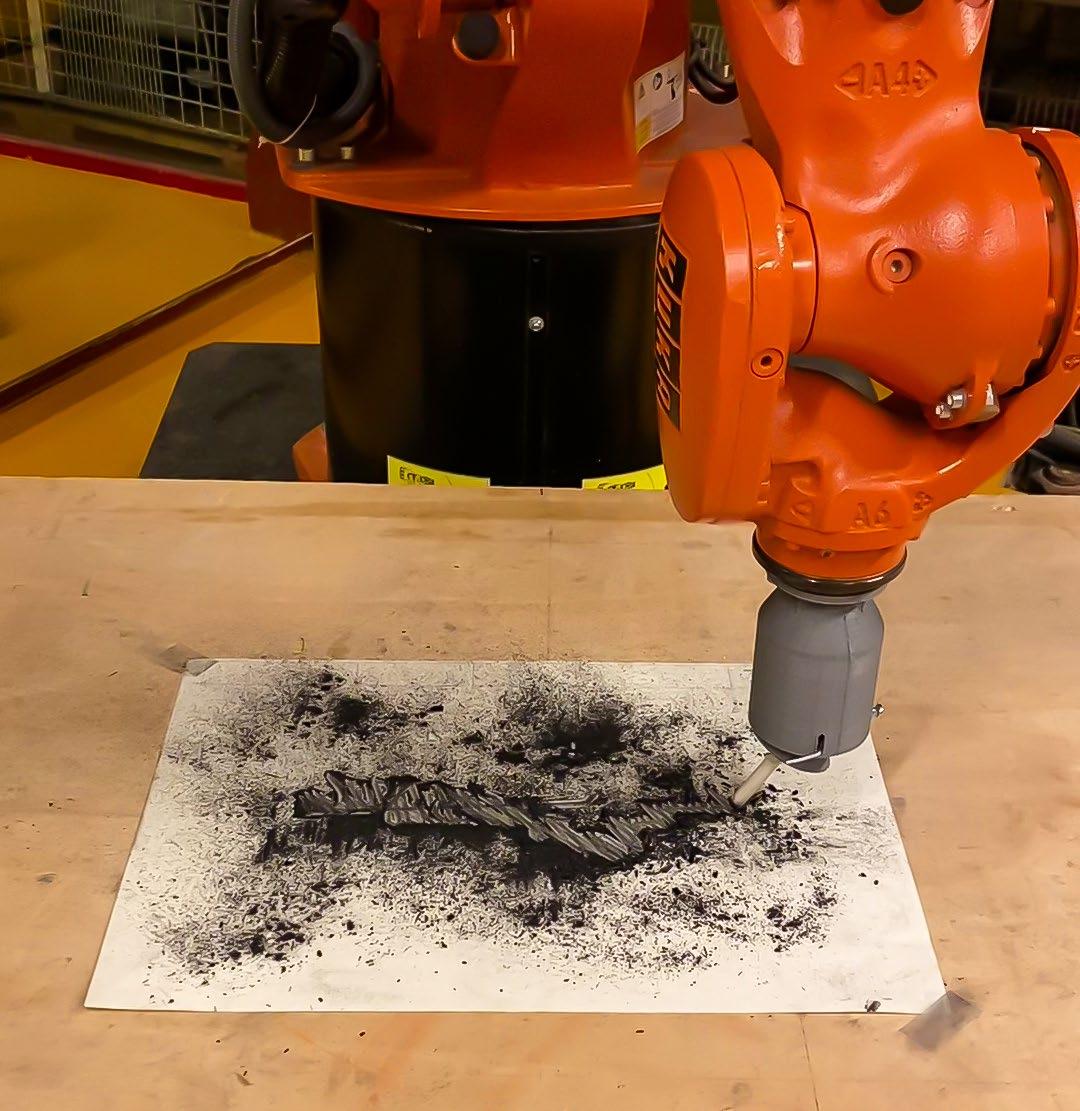
DRAWING MACHINE
ROBOTIC ARM END
EFFECTOR AN INTERPLAY BETWEEN HUMAN AND ROBOT
The project focuses on developing a robotic drawing tool that utilizes hatching techniques inspired by Leonardo da Vinci. The methodology involves experimenting with different drawing tools and movement mechanisms to create expressive and organic artwork. The key findings demonstrate that a robotic arm can intelligently apply hatching techniques, adjusting line density based on image brightness, and incorporating controlled randomness to enhance artistic expression.
Project Team: Abdullah Mallah, Juna AL Turck, Montaser Mesk
It examines the interplay between robotics, artistic expression, and material properties, addressing how automation can replicate and innovate traditional artistic methods. The study employs trial-based prototyping, agent-based simulation, and material experimentation using charcoal to refine the tool’s drawing capabilities.
The findings contribute to both the fields of computational art and robotic-assisted creativity, highlighting how robotic systems can be adapted to mimic and innovate upon human artistic techniques. This work provides valuable insights into digital fabrication, automated artistry, and humanrobot interaction, potentially influencing future developments in robotic drawing, machine-assisted creativity, and hybrid artmaking processes.
Charcoal was selected as the primary drawing medium due to its suitability for examining the instrument’s functionality, particularly in relation to rotation and pressure dynamics. Its responsiveness to varying degrees of applied force allowed for an in-depth exploration of the tool’s capabilities in creating expressive and controlled markings.
Charcoal’s expressive and fluid lines effectively capture a subject’s energy and movement. Its rapid and gestural strokes make it particularly well-suited for dynamic and lively compositions. Additionally, the texture of the paper interacts with the charcoal, imparting a distinct character to the lines and enhancing the overall aesthetic quality of the artwork.
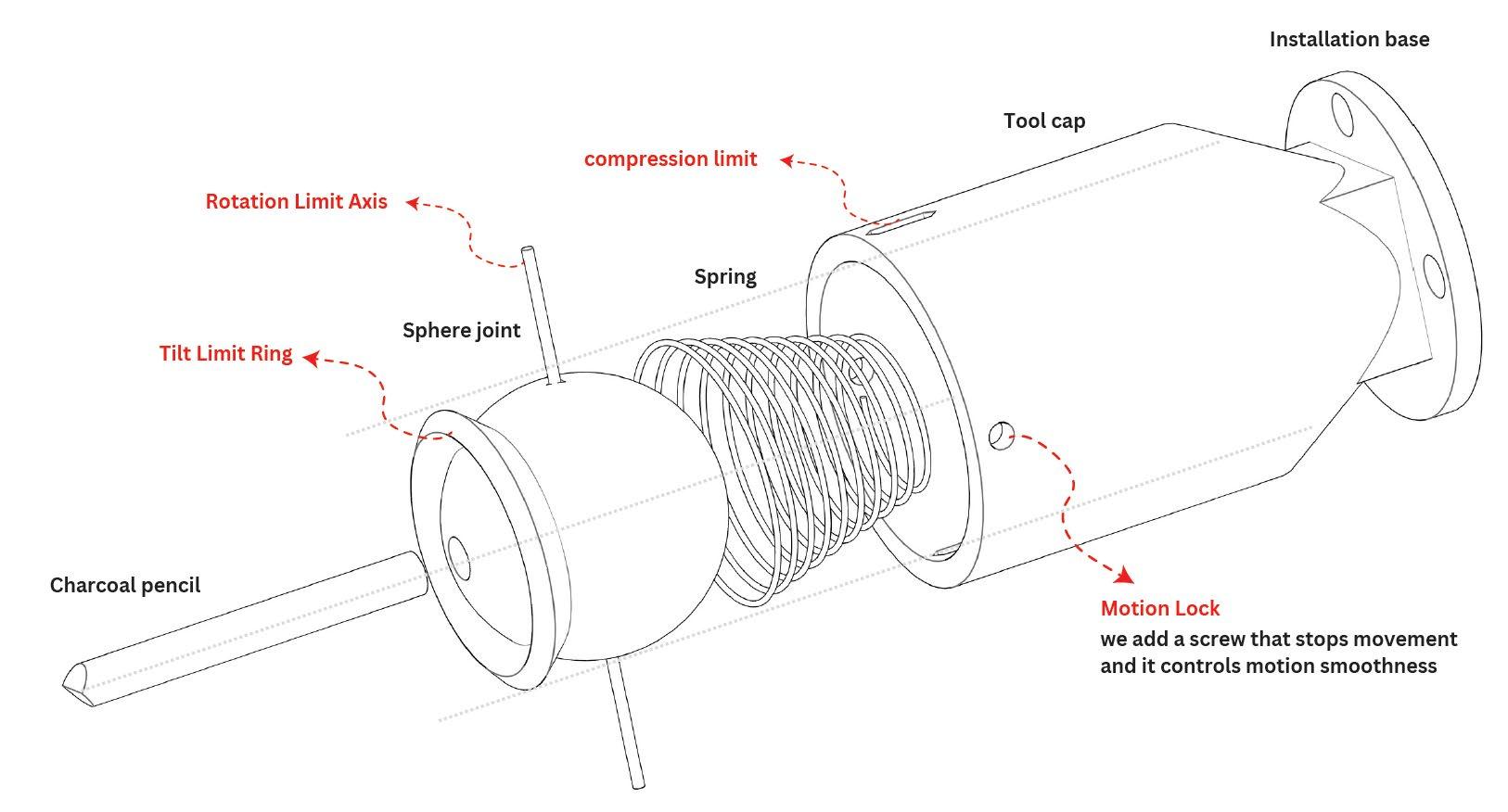
The blending stump was chosen as the pen-like component of the instrument due to its simplicity and practicality. It provided greater ease of manipulation for the robotic arm compared to alternative tools such as sponges and brushes. The blending stump allowed for more controlled application of charcoal, facilitating precision in shading and texture creation.
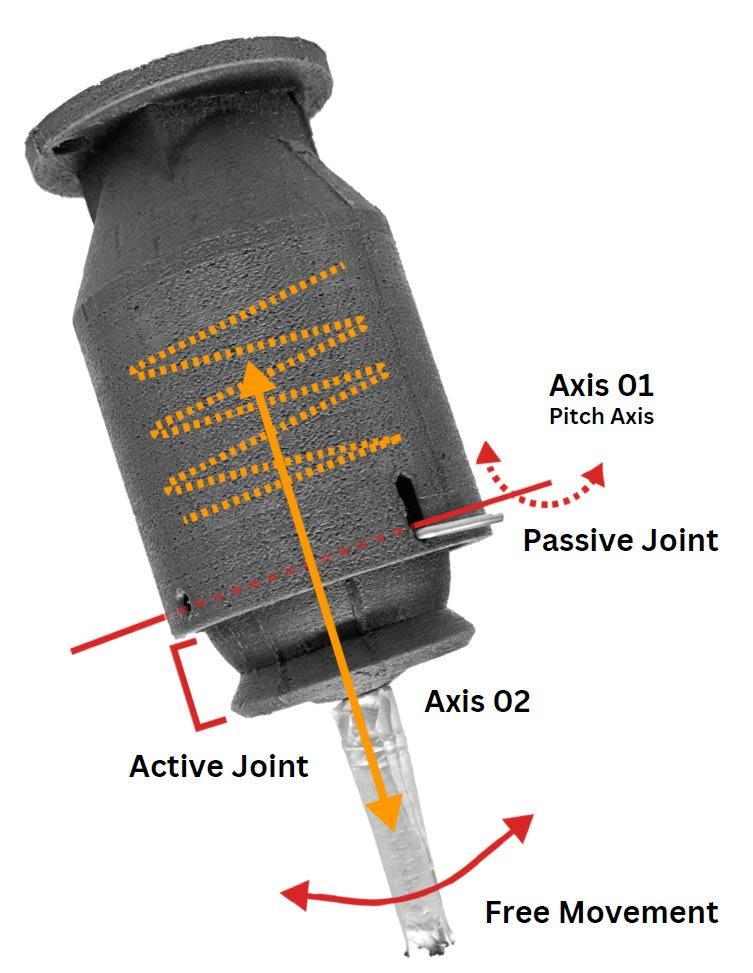
The project initially involved the development of a robotic drawing tool designed to replicate traditional artistic techniques. The tool was equipped with a pen-like instrument, specifically a blending stump, to facilitate controlled and precise mark-making.
The third iteration modified the tool by changing the rotation from a full 360-degree motion to a single-axis rotation, repositioning the pen to the tool’s center for increased precision. In the subsequent fourth iteration, further refinements included restricting rotational movement and integrating a spring mechanism. This addition provided consistent pressure against the drawing surface, enabling controlled variations in the charcoal application, thus enhancing artistic expression and precision.