 Vittorio Netti | Portfolio
Space architect
Vittorio Netti | Portfolio
Space architect
WWW.VITTORIONETTI.COM CONTACT@VITTORIONETTI.COM
Vittorio Netti Space Architect
Vittorio Netti | Portfolio
Space architect
“The Earth is the cradle of humanity, but one cannot stay in the cradle forever.”
Konstantin TsiolkovskyVittorio Netti, born in Bari, Italy, Bachelor, and Master of Architecture at IUAV (Venice), Master in Space Architecture at UH (Houston), currently pursuing a PhD in Aerospace Engineering at Politecnico di Bari remotely from Houston. More than 15 Scientific Publications across the world on Space Architecture, System Engineering and Aerospace Engineering topics.

He worked as Consultant in Space Architecture for different Aerospace and Space architecture firms (Search+, Sierra Space, and Boeing, among others). He has been involved in advanced R&D projects with NASA and ESA. Performed 4 field research missions. Member of the Space Architecture Technical Committee (AIAA). He co-founded two aerospace hardware development startups based in Italy. He currently lives in Houston and he`s employed as Researcher at Sasakawa International Center for Space Architecture.
Architect01 Earth
IDVS: XR Modular framework
02 Microgravity
MMEVR: Robotic EVA assistant
Sierra SS: Commercial LEO Destination
DMF: Habitat outfitting infrastructure
03 Moon
Olympus: Lunar landing pad design
PolyReg: Polymer/regolith mix
LSS: Minimal lunar surface habitat
MUV: Modular utility lunar rover
04 Mars
HiveMars: hybrid class martian habitat
X5: Autonomous VTOL Martian drone

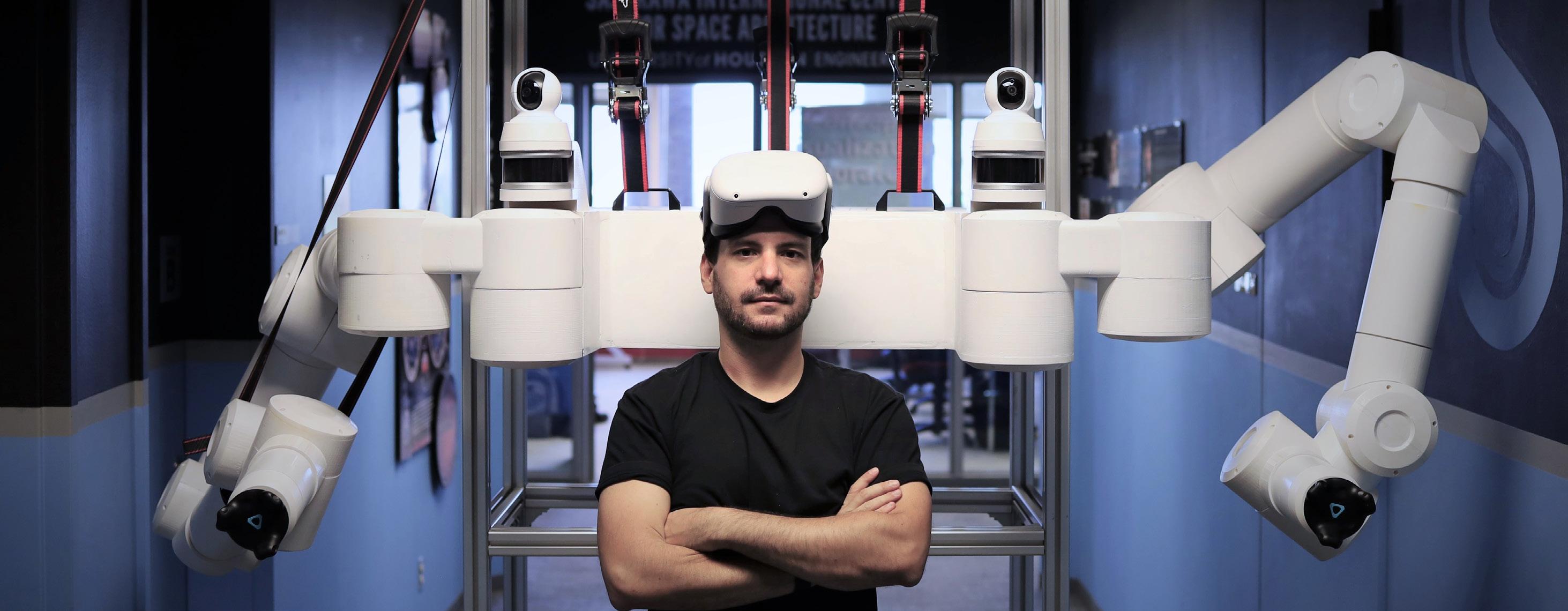
IDVS: Immersive Design&Validation Space XR modular framework
Modular XR infrastructure for immersive design
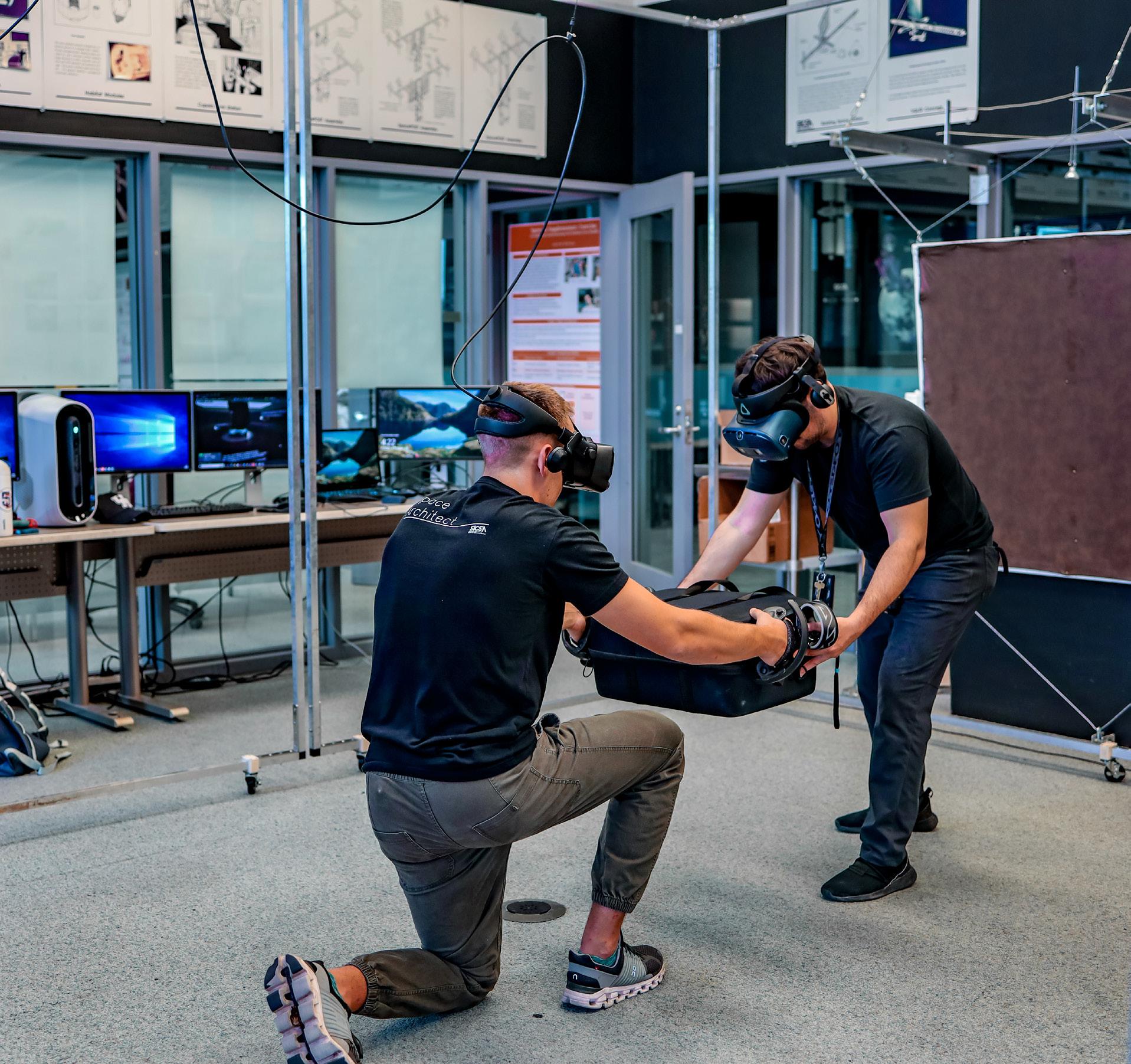
Immersive technologies can help overcome those limitations by minimizing the dependency on physical prototyping of assets and help condense the iterative evaluation/implementation process optimizing the transition from design to human-in-the-loop testing. The purpose of this project is to create an MR (Mixed Reality) modular infrastructure to bring the design of space hardware to the virtual space.
IDVS allows to bind together reality and digital spaces seamlessly, enabling unprecedented levels of interaction in Virtual Reality simulations thanks to the introduction of low fidelity mockups bonded with their digital twins.
This infrastructure has been developed at Sasakawa International Center for Space Architecture’s immersive laboratory as a breakthrough towards the implementation of those technologies in space hardware testing.
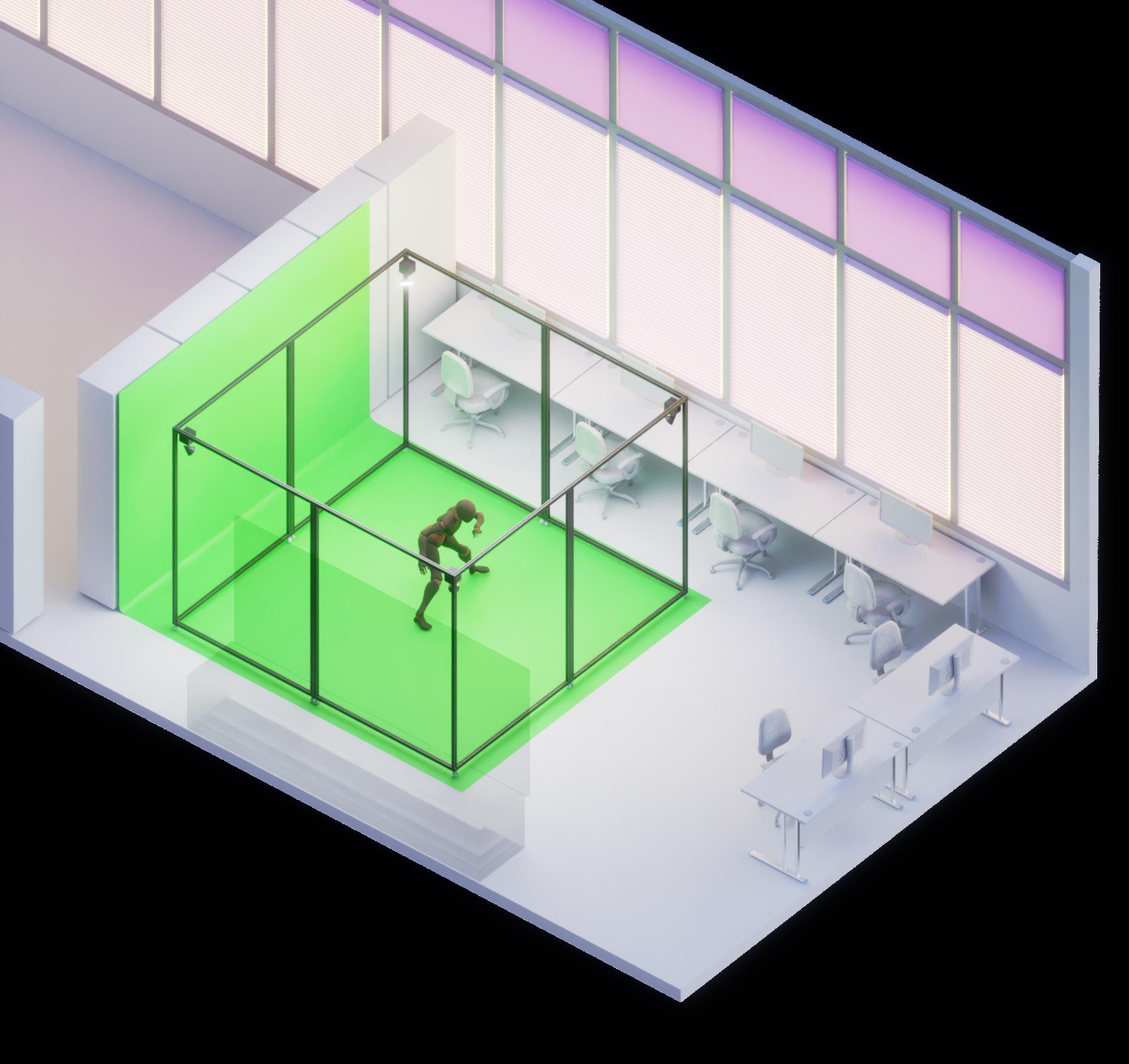
On the left: Representation of the IDVS cage as it has been built inside the XR laboratory at SICSA.
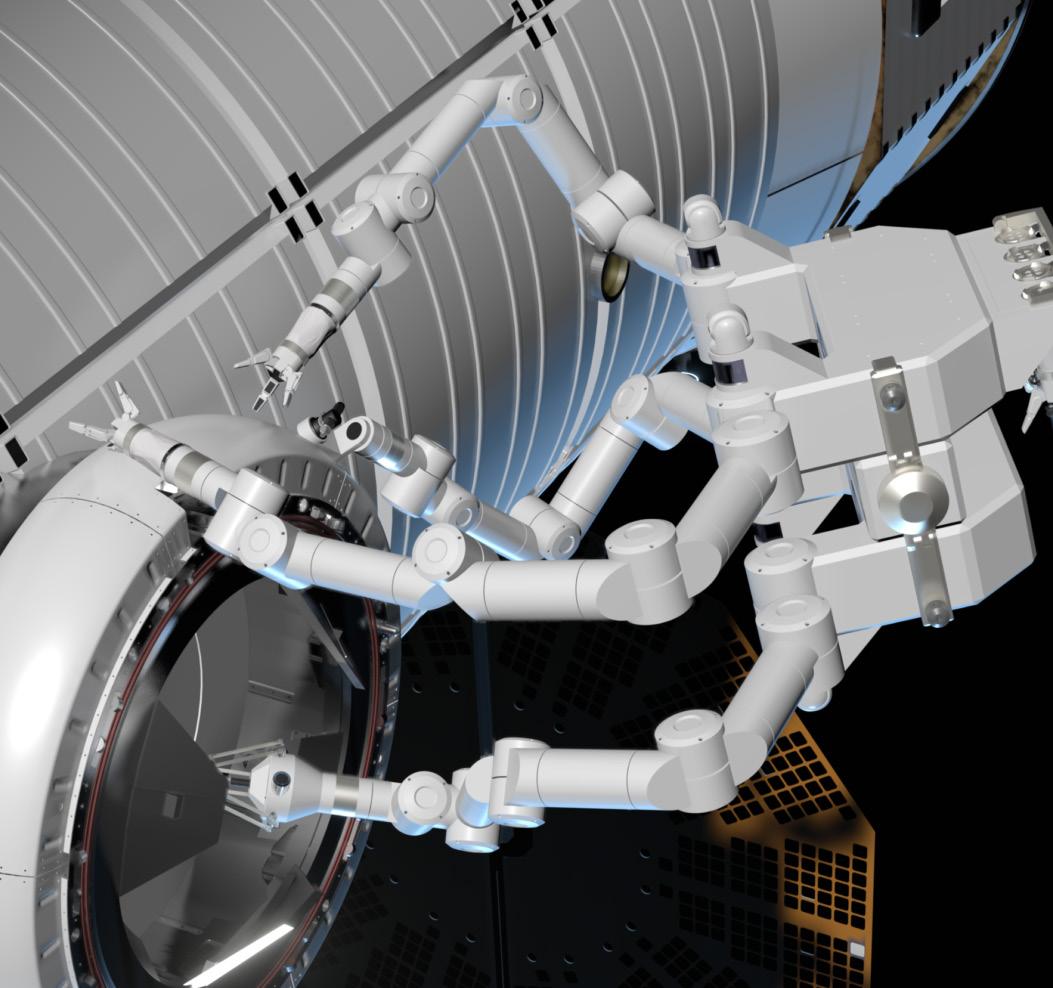
MMEVR presents a new modular architecture that allows astronauts to configure the robot to follow specific mission requirements. The robot provides 2 to 4 additional robotic limbs and a navigation unit to perform autonomous tasks or collaborate with human crews during EVAs.

MMVR can be operated in 3 different control modes: Autonomous, teleoperated or robotic augmentation for EVA suits. The design concept includes an ISPR (International Standard Payload Rack)-integrated control module for teleoperated scenarios and a standard docking interface with space assets such as orbital and deep space modules or spacecrafts.
MMEVR incorporates the lessons learned from the MMU, Safer, Robonaut, DEXTRE, and other space robotic assets to achieve unprecedented flexibility for the future generation of In-Space operations.
Vittorio Netti Space Architect
The first commercial inflatable LEO destination
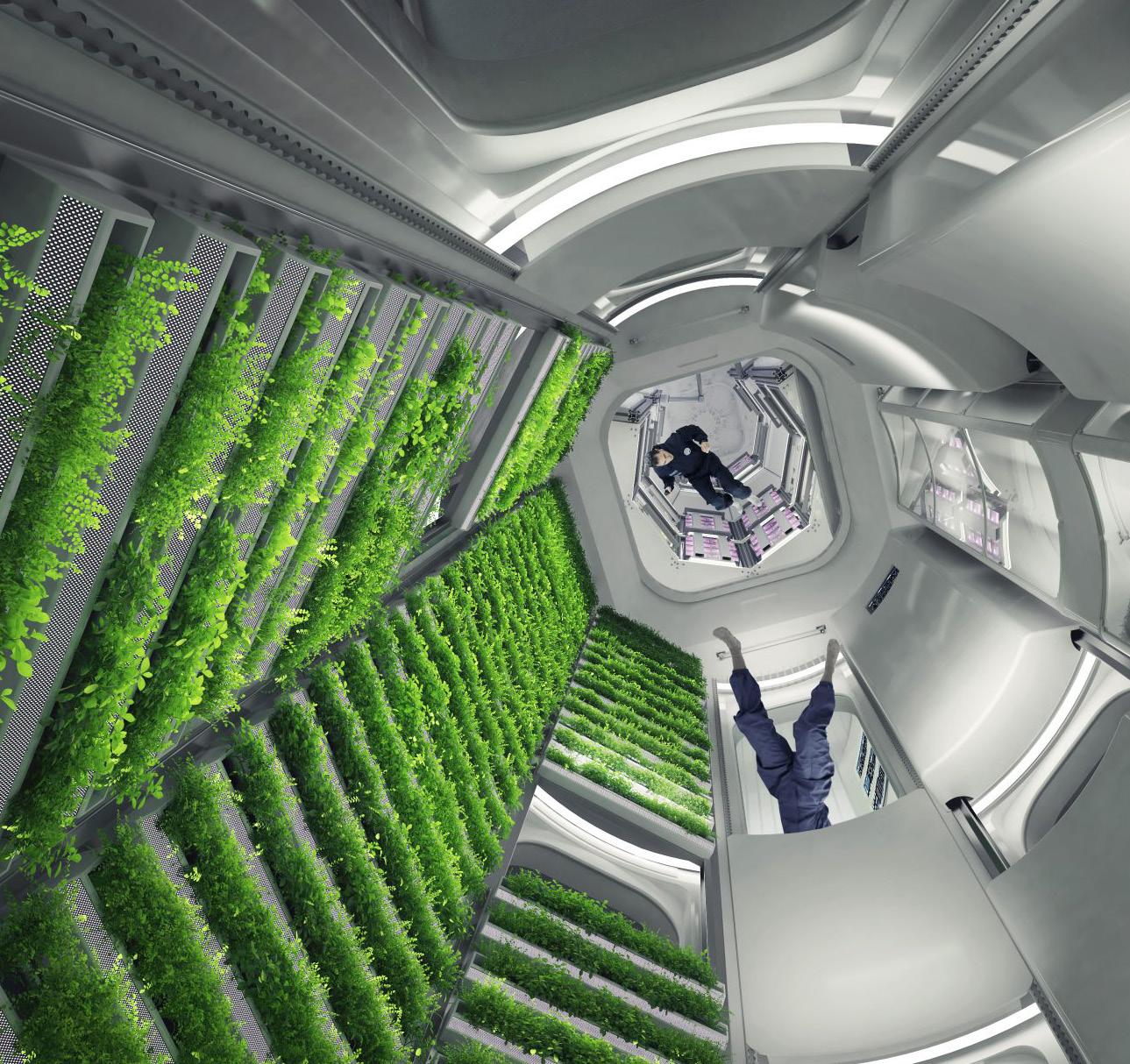
Sierra Space’s space station leverages its transportation and destination technologies including the Dream Chaser spaceplane and LIFE Habitat. The station is a configuration of multiple expandable LIFE habitats that can be serviced by both cargo- and crew-carrying Dream Chaser spaceplanes.
Sierra Space’s LIFE habitat is currently being designed to support four crew members living and working on long-duration missions, such as those to Mars. It comfortably houses six for missions in LEO, but can accommodate 12 crew for shorter periods of time such as those during which crew members transition. Because of its modular nature, additional habitats can be joined to each other to accommodate more crew, or for a variety of other purposes.
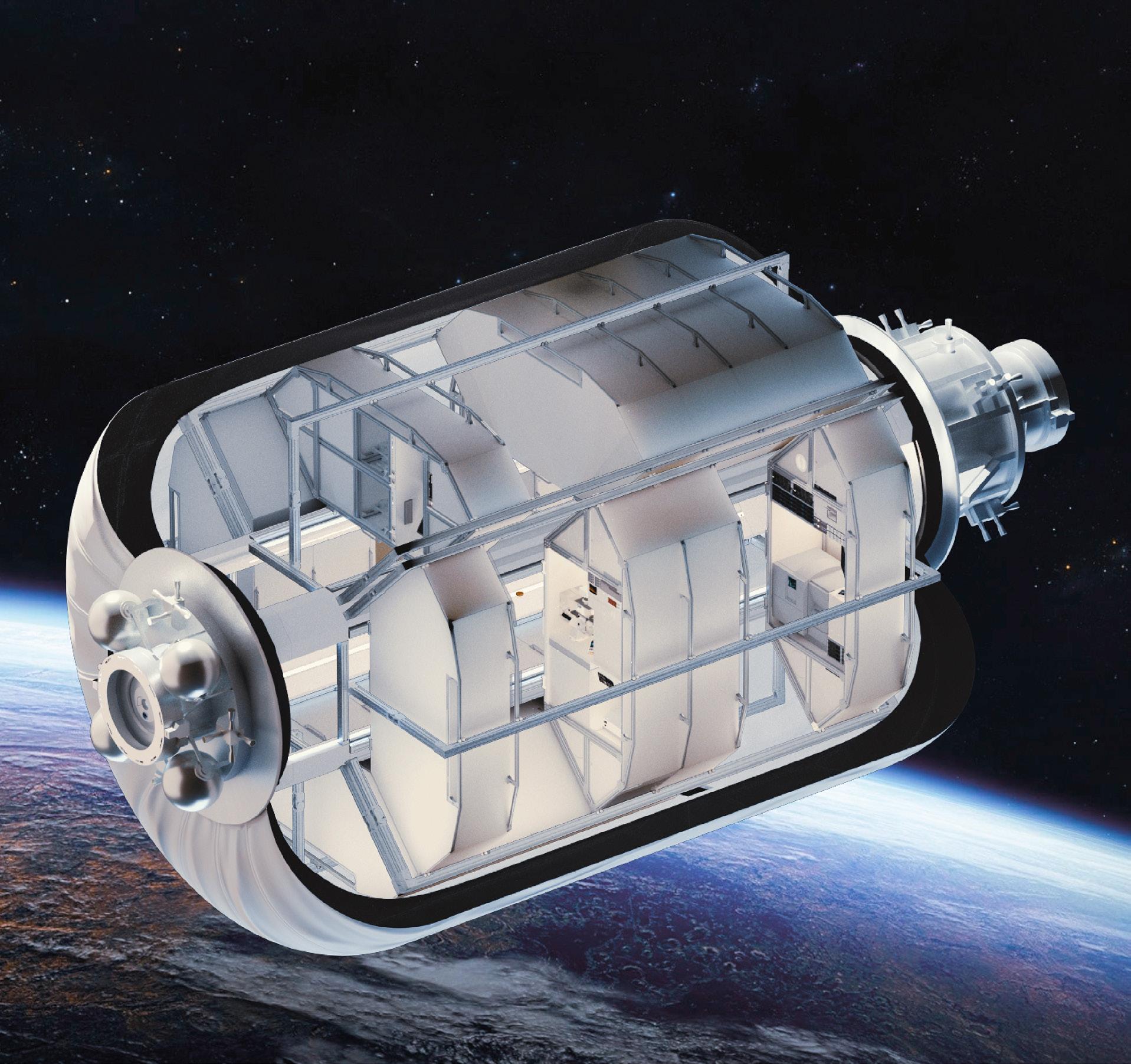

The project aims at developing a new standard for payload rack in the inflatable space modules: the Deployable Modular Frame (DMF). The DMF expands itself radially from the center of the module, starting from four structural pylons. It creates a solid infrastructure allowing for the configuration of a variety of spaces, including storage space, laboratories, workstations and living quarters. The DMF consists of two main parts: the Deployable Frame (DF) and the Modular Rack (MR). Once the frame is deployed, it provides four linear slots suitable to install the modular racks.
The rack is the basic element that allows for the storage of equipment inside the frame. Once they are installed, the racks can slide on the frame’s rails, dynamically changing the space inside the module.
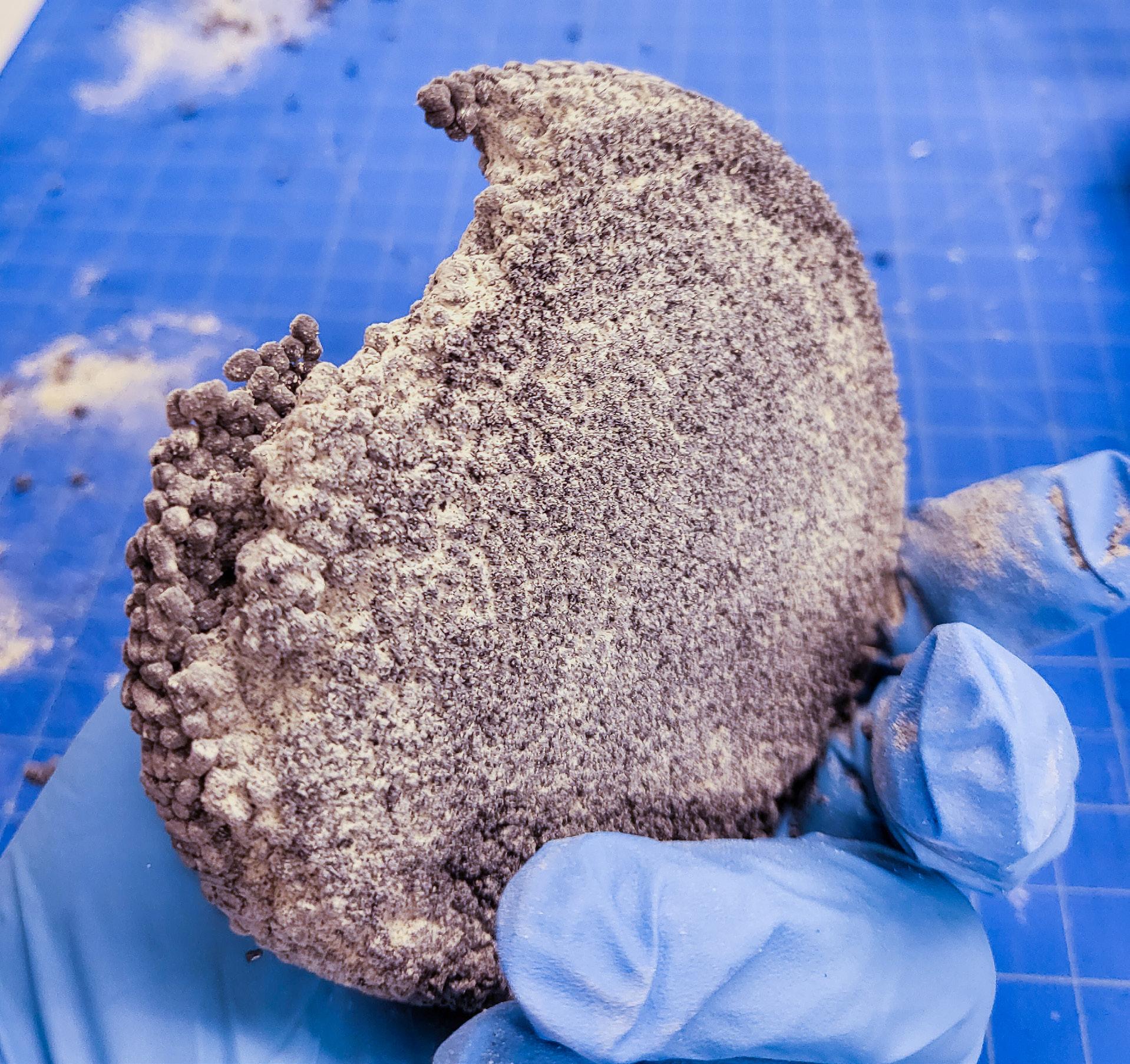
Validating ISRU is a fundamental asset to enabling the future of space exploration. The current NASA Artemis plan identifies ISRU as one of the most important fields of development for the next missions on the Lunar surface.
Superpolymers such as PEEK or Ultem are already protagonists of a material revolution in the space sector. They show similar or superior mechanical properties to space-grade metals while retaining the manufacturing simplicity and lightness typical of polymers. On the lunar surface, we can mix them up with locally sourced materials (ISRU) to enhance further reduce the dependence on earth resources and engineer specific material properties to solve the challenges of space exploration.

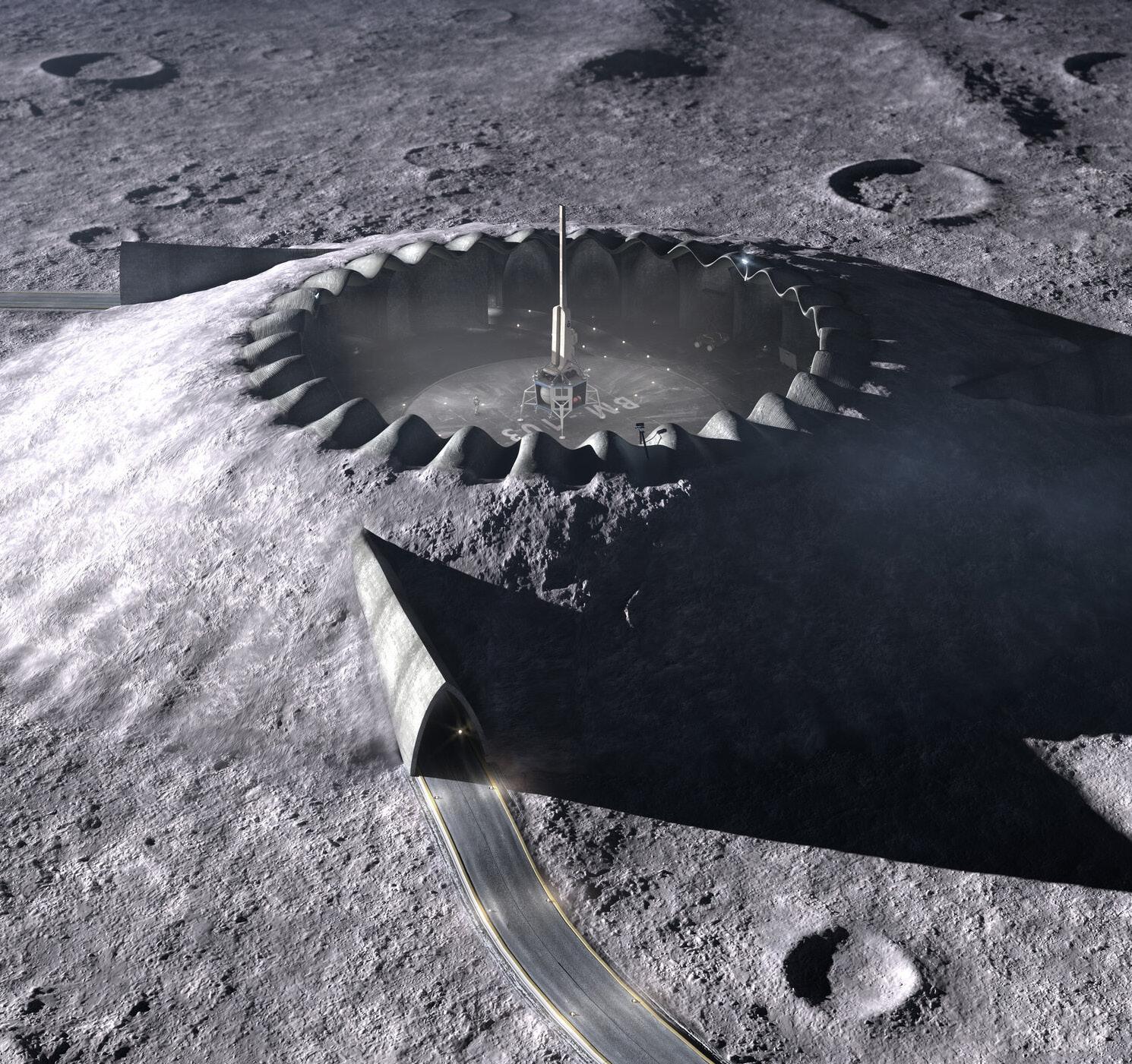
In Project Olympus, ICON and SEArch+ have developed design schematics for critical surface infrastructure necessary for a permanent lunar base. In 2020 ICON was awarded an SBIR contribution from Marshall Space Flight Center (MSFC) to contribute to NASA Marshall’s Moon-to-Mars Planetary Autonomous Construction Technologies (MMPACT) initiative. ICON will first demonstrate additive manufacturing capabilities for horizontal structures such as roads and landing pads, followed by demonstrations of vertical structures, including unpressurized radiation shelters as well as habitats.
Vittorio`s job as a consultant for SEArch+ was to assess different strategies to deal with the dust ejecta during the landing sequence and design different landing pad options based on the identified drivers.
On the left: 3 different dust mitigation strategies and their applications in the study.
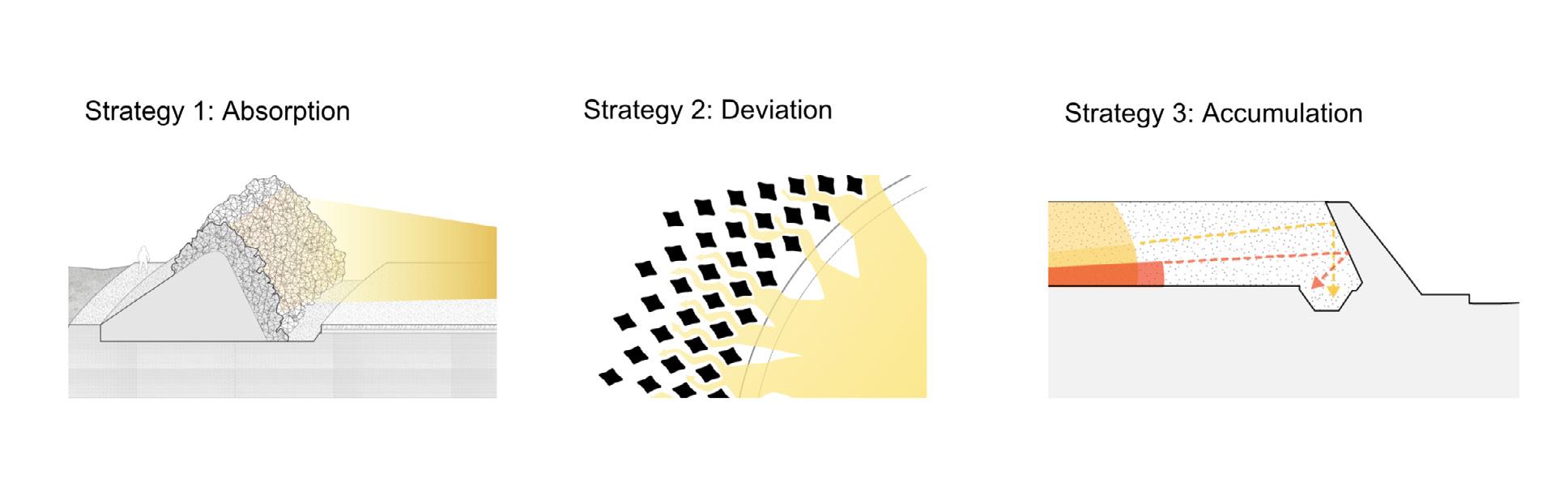
Image Credits: SEArch+ LLC


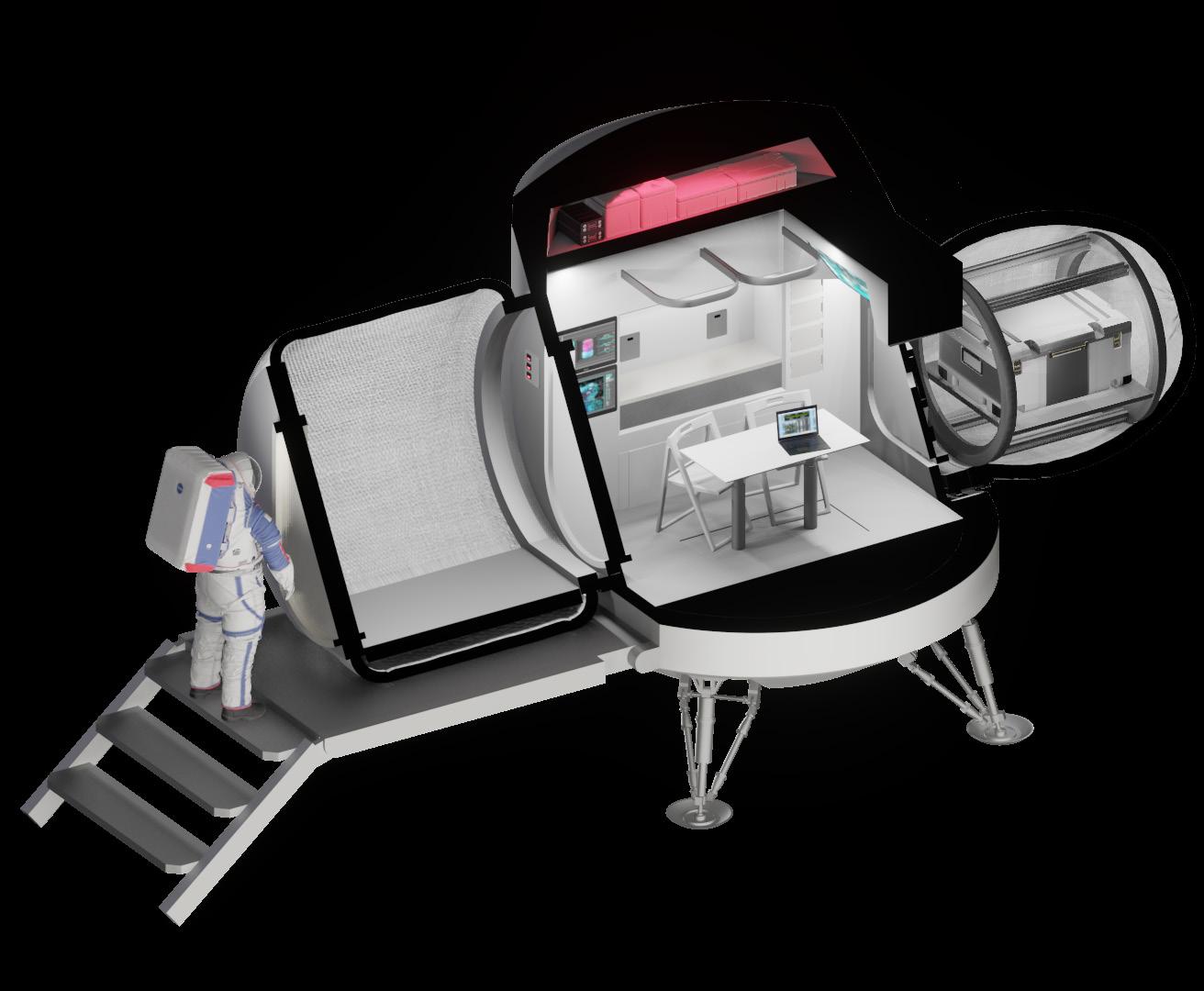
The MLSS study is aimed to develop conceptual design options for a Lunar Terrain Vehicle (Rover) and a Small Lunar Habitat that potentially become a part of an overall Lunar Surface Systems Study. The goal of this work was to provide comprehensive design concept evaluations and derived from them recommendations. Such recommendations were to be based on the space architecture strategy of designing all surface elements interconnected with each other’s objectives and requirements.
The six-month lunar surface systems study was sponsored by The Boeing Company and conducted at Sasakawa International Center for Space Architecture This project is the results of the study and outlines the next steps for developing a comprehensive research plan for lunar infrastructure construction for a shortduration mission (14 days) in the vicinity of the Shackleton crater.
MUV: Modular Utility Vehicle
Next step multimission rover for lunar exploration
 Netti Space Architect
Netti Space Architect
A future-proof vehicle for the lunar surface
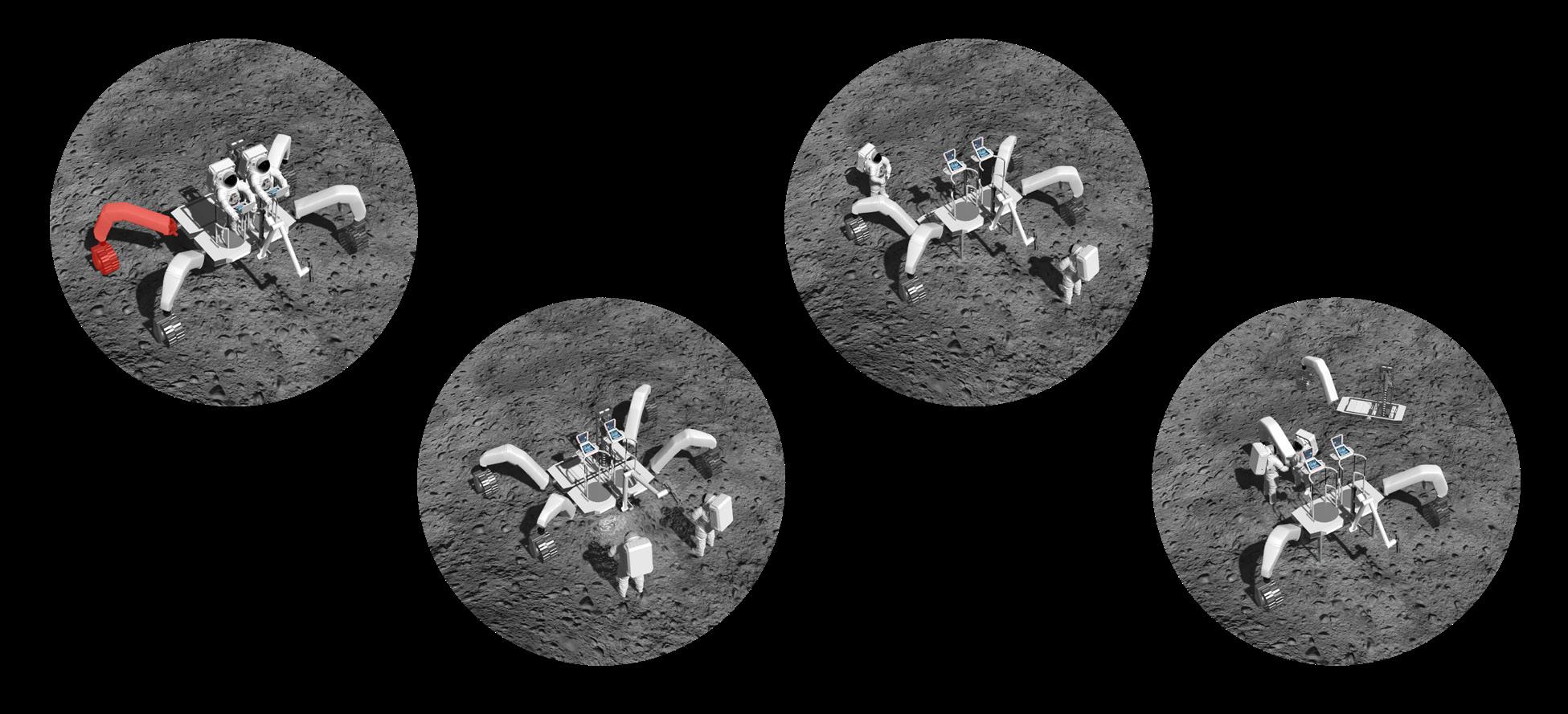
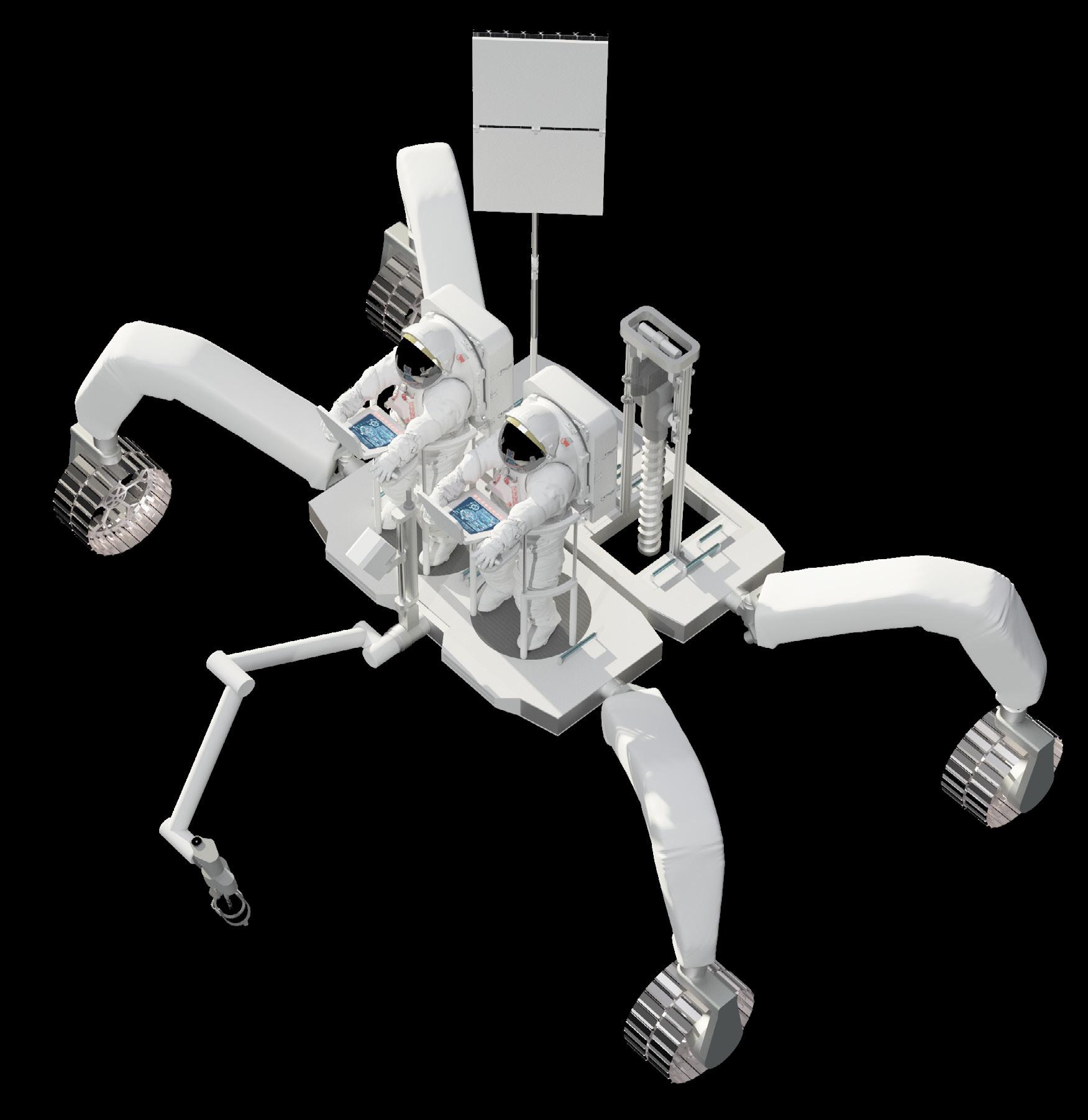
the Modular Utility Vehicle (MUV) is a concept for an unpressurized Lunar Rover. MUV is a feasible design for a modular, upgradeable, telerobotically operated and manned rover for navigating the Lunar South Pole. Designed for the National Aeronautics and Space Administration (NASA) Revolutionary Aerospace Systems Concepts Academic Linkage (RASCAL) Competition, its capabilities include payload deployment, water-ice sample collection, geologic analysis, and terrain mapping.
The modular aspects of the vehicle allow it to perform multiple tasks at once, either as a singular unified vehicle, or to be broken into smaller components and used singularly or as a swarm. This allows significant flexibility of vehicle management and the eventual deployment of habitation and scientific structures on the Lunar surface.
On the left: maintainabilityand field-stripping capabilities are one of the main drivers behind the design of MUV.

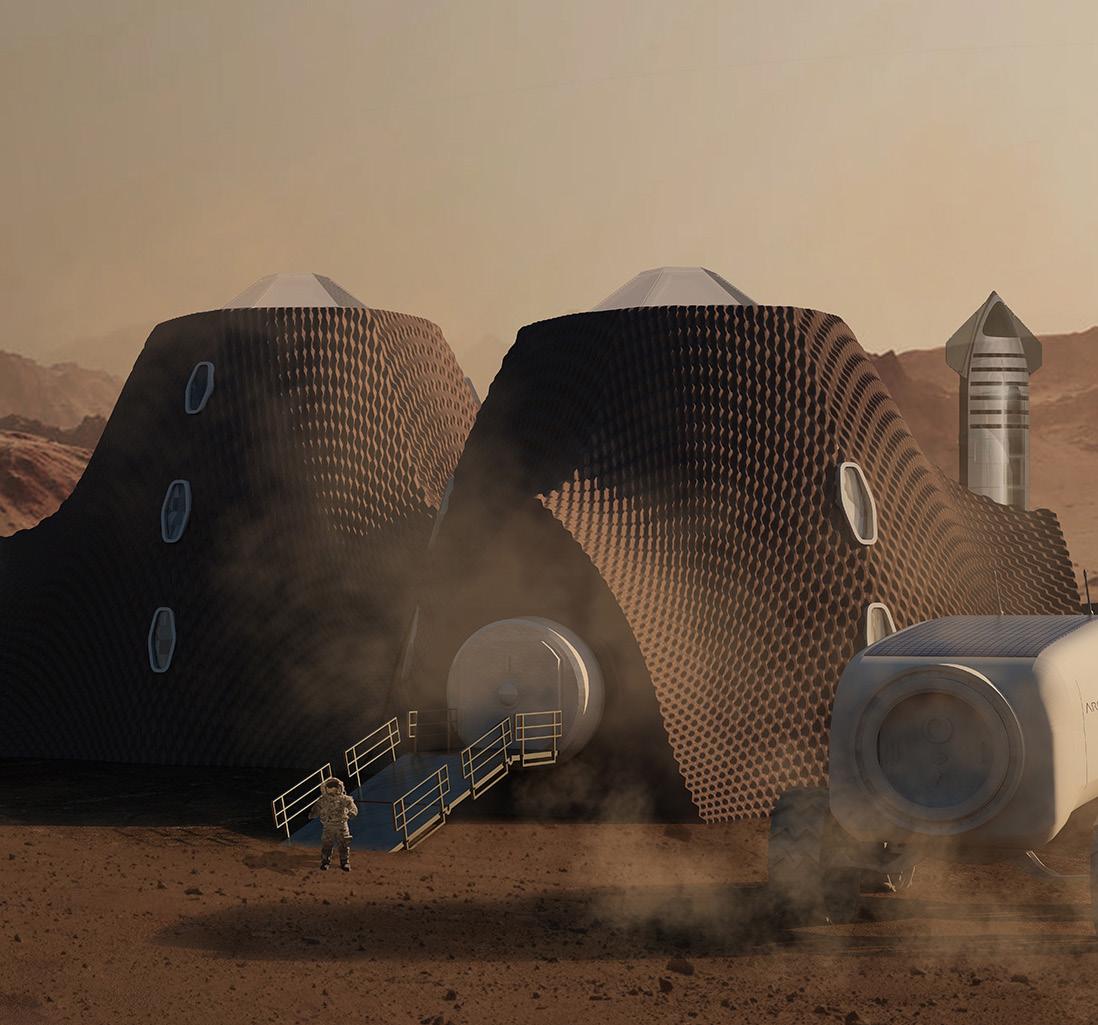
This project aims to provide both the living and working environment for eight crew members during 670 – sol mission duration. The project is focused on the architecture of Martian habitats to be built through automated surface assets which will support the site preparation for human crews, collecting resources, and construction materials from local resources.
The project, named Hive Mars, presents a feasible design that aims is to reduce the launch mass and cost of future human surface missions, considering extensive usage of in-situ resources and current and near-future technologies to guarantee crew selfsustainment for a Martian settlement.
The habitat structure consists of an external Class 3 shell and an inflatable Class 2 internal structure.
On the left: Sectional view of the HiveMars habitat, where it is possible to see its foundations.
 Vittorio Netti Space Architect
Vittorio Netti Space Architect
X5 Drone Mars exploration
VTOL autonomous drone

The X-5 Drone is an experimental concept for an autonomous aerial platform designed to complement the first human crews on the Martian surface. The main objective of X5 is to demonstrate the reliability and the capabilities of an autonomous solar aerial drone platform for surface surveys on Mars, by performing test demonstrations in analog sites on Earth.
Thanks to its VTOL and automatic flying capabilities, the vehicle can autonomously achieve the mission objectives, performing take-off, hovering and landing maneuvers without the need for direct control from the crew. In one of its versions, the X5 can be powered by lightweight double-junction solar arrays, that can potentially assure a dawn-sunset flight autonomy.
On the left: Exploded view of the x5. Is it possible to observe the different options for wings and payload noscones.











