INTRODUCTION
Digital Farmhand Infographic
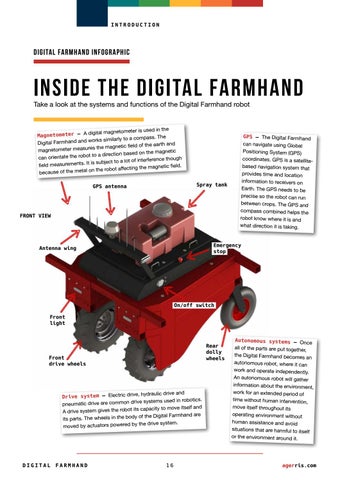
Inside the Digital Farmhand Take a look at the systems and functions of the Digital Farmhand robot
is used in the digital magnetometer Magnetometer – A mpass. The works similarly to a co Digital Farmhand and of the earth and res the magnetic field magnetometer measu the magnetic to a direction based on ot rob the e tat en ori n ca erference though is subject to a lot of int field measurements. It the magnetic field. on the robot affecting because of the metal Spray tank
GPS antenna
FRONT VIEW
GPS – The Digital Farmhand can navigate using Global Positioning System (GPS) coordinates. GPS is a satellitebased navigation system that provides time and location information to receivers on Earth. The GPS needs to be precise so the robot can run between crops. The GPS and compass combined helps the robot know where it is and what direction it is taking.
Emergency stop
Antenna wing
On/off switch Front light
Rear dolly wheels
Front drive wheels
hydraulic drive and Drive system – Electric drive, systems used in robotics. e pneumatic drive are common driv capacity to move itself and A drive system gives the robot its of the Digital Farmhand are its parts. The wheels in the body the drive system. moved by actuators powered by
DIGITAL
FARMHAND
16
Autonomous systems – Onc e all of the parts are put together, the Digital Farmhand becomes an autonomous robot, where it can work and operate independently. An autonomous robot will gather information about the environmen t, work for an extended period of time without human intervention , move itself throughout its operating environment without human assistance and avoid situations that are harmful to itsel f or the environment around it.
agerris.com