ASSEMBLAGE, MOTIF ET RÉCIPROCITÉ TERRAIN DE JEU D’UNE ARCHITECTURE ALGORITHMIQUE
BEGUIN Nestor Mémoire de Master 2018-2019 Sous la direction de ERKAN David ULB - Faculté d’Architecture La Cambre-Horta
1
Cet ouvrage est le fruit d’une recherche alimentée par mon parcours au sein de la faculté ULB La Cambre-Horta. Le sujet choisi est l’aboutissement d’une exploration à la fois pratique et théorique sur l’intégration du monde numérique dans celui de l’architecture. « Assemblage, motif et réciprocité » fait référence à la façon dont une nouvelle génération d’architectes s’amuse à traiter l’architecture, ou du moins sa matérialisation, par l’utilisation d’algorithmes et de techniques novatrices. Il prend la forme d’un mémoire-projet, où l’inspiration théorique se reflète parmi d’une série de prototypes dont certains des résultats sont explicités dans les derniers chapitres. Je tiens à remercier David Erkan, mon directeur de mémoire, pour ses suggestions avisées tout au long de l’écriture et de la réalisation de mes recherches au milieu des machines parfois capricieuses du laboratoire. Secondement, je remercie ma mère pour ses précieux conseils de mise en page et aux Philippe(s) pour en avoir permis l’impression. Finalement, je remercie Eva Leblatier pour ses courageuses relectures et Aurélien Roquette pour ses critiques constructives débattues autour du brasero. En espérant que vous en apprécierez la lecture. Nestor BEGUIN Bruxelles, 20 août 2019 Toutes les figures ne comportant pas de références bibliographiques sont produites par l’auteur.
2
ASSEMBLAGE, MOTIF ET RÉCIPROCITÉ TERRAIN DE JEU D’UNE ARCHITECTURE ALGORITHMIQUE
3
Table des matières Introduction 9 L’architecture computationnelle
13
L’architecture algorithmique
14
Le dessin algorithmique
15
Qu’est-ce qu’un algorithme
15
Algorithmique ou paramétrique
15
Brève évolution de l’architecture paramétrique
16
Gaudí 16 Freï Otto
16
Patrik Schumacher et le Paramétricisme
18
Le modèle paramétrique
19
La conversion
19
La rationalisation
19
Le contrôle
20
Générer et tester
20
Partager les informations
20
Grasshopper – Make your own tool
21
Architecture algorithmique et fabrication numérique.
23
Le robot et l’artisan
23
Le robot et l’architecte
23
Sectioning, Tessellating, Folding, Contouring, Forming
24
Sectionning — trancher
24
Mafoombey — Martti Kalliala, Esa Ruskeepää, 2005
24
[c] space – Alan Dempsey, Alvin Huang, 2008
25
Tesselating – décomposer Technicolor Bloom — Brennan Buck, 2007 Folding – plier Dragonfly – Tom Wiscombe/EMERGENT, 2007 4
25 26 26 26
Contouring – détourer Design 306 — Erwin Hauer et Enrique Rosado, 2005
27 27
Forming – mouler
27
Approche computationnelle du bois
28
Le design computationnel intégré
29
ICD/ITKE 2011
30
ICD/ITKE 2010
31
Intégration technique et accessibilité
32
Le projet Wikihouse — Alastair Parvin
32
L’éloge du carburateur
38
Une micro-usine sur chantier
41
Le mode de fabrication non standard
42
Objectiles 43 La dimension économique
43
L’essai et l’erreur
44
Conclusion 45
Assemblage, motif et réciprocité
Les structures réciproques ou nexorades
46
49
L’architecture des structures réciproques
50
Brève histoire des structures réciproques
52
Exemples contemporains
54
En Europe
54
Toit lamella
54
Serpentine Gallery Pavilion 2005
55
Metropol Parasol
56
Au Japon
58
Théâtre de marionnettes de Seiwa
59
L’observatoire du mont Rokko
60
5
Les pavillons
62
Rinus Roelof
62
Forest Park
63
Kreod 63 Undulatus 64 Nexorade Hybrid
65
Nexorade, nexorade hybrid, ou gridshell
66
Composition d’une nexorade
68
Longueur et longueur d’engagement
69
Inclinaison et nombre de nexors
69
Excentricité et section
70
Tesselation régulière, semi-régulière, demi-régulière et apériodique
71
Syggraph 2013 — Reciprocal Frame Structures Made Easy
74
Deep Decoration
77
L’élément 79 La connexion
82
Superposition 82 Superposition simple
82
Superposition avec coin
82
Conclusion 82 Coupleurs 83 Raccord avec nœuds
83
Raccord avec joints de fixation
83
Raccord avec étriers
83
Conclusion 84 Chevilles et plaques
84
Raccord avec chevilles
84
Raccord avec clous ou vis
84
Raccords avec boulons
84
Raccord avec plaques
84
Raccord avec tiges filetées collées
85
Conclusion 85 6
Encoches 85 Raccord mi-bois
85
Raccord en tenons et mortaises
86
Conclusion 86 Vers une jointure bois-bois intégrée
87
Intégrer la recherche à la pratique
89
Form-finding et prototypes Cadre de recherche
Form-finding par rotation
91 92
94
Form-finding par translation
100
Form-finding par cellules
106
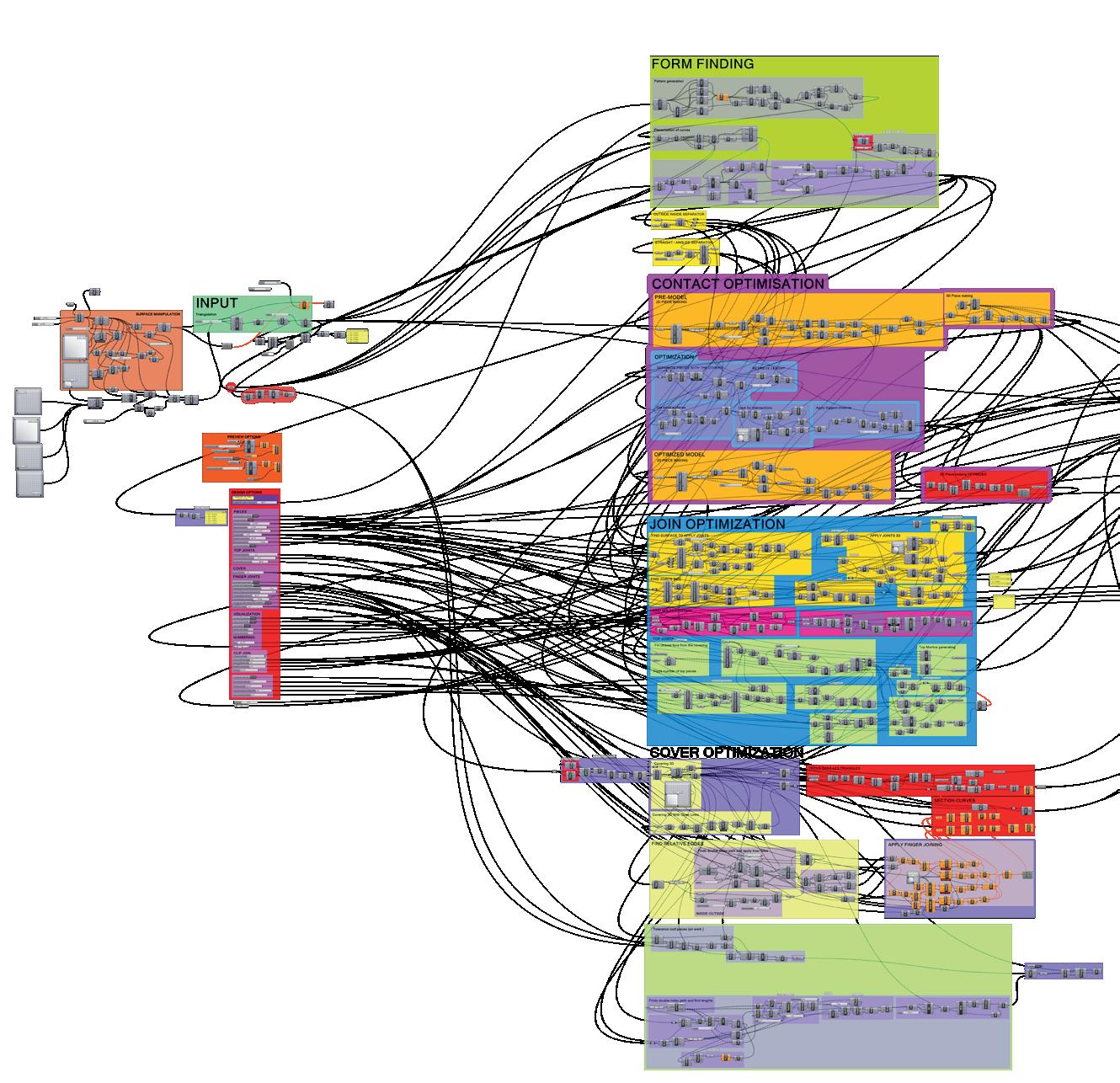
Le script
121
Résumé 122 Détail 124
Conclusion — L’objet technique de Simondon
133
Bibliographie et iconographie
141
Références employées
142
Références Iconographiques employées
146
Bibliographie 150 Filmographie 153
7
8
1. INTRODUCTION 9
Ce mémoire a pour ambition d’étudier l’intégration technologique dans l’architecture par l’emploi conjoint de la modélisation computationnelle et de la fabrication digitale. L’enjeu d’une telle question se situe au niveau des petites agences, qui, ne pouvant s’offrir les services d’un bureau de recherche spécialisé, ont une liberté d’action limitée à l’étendue de leur connaissance. En ce cas dans quelle mesure l’algorithme peut-il élargir l’horizon de compétence de l’architecte ? La fabrication numérique ouvre un nouveau sujet dans l’évolution de la construction et nous verrons ici comment, dans le cas de l’utilisation d’un processus algorithmique, elle supporte l’émancipation de la conception architecturale. Afin de mesurer le potentiel d’une telle liberté, cette recherche abordera plusieurs questions relatives au progrès de ces techniques tout en évaluant leurs compatibilités vis-à-vis d’outils abordables, toujours du point de vue d’une agence qui aurait pour ambition de ne pas déléguer la réalisation de ses détails. Dans la poursuite de cet objectif, nous verrons donc premièrement la notion d’algorithme et de modèle algorithmique. L’approche algo rithmique de la conception architecturale génère différents enjeux et de nouvelles difficultés, particulièrement vis-à-vis de l’idée de standard et de non-standard, dont nous examinerons les impacts. Cette méthode va de pair avec la production numérique et nous en aborderons également les différents modes opératoires, plus spécifiquement au niveau de leurs diversités et de la façon dont le langage algorithmique facilite l’émergence d’innovantes synergies ou de nouvelles adaptations entre plusieurs techniques. Ensuite, nous explorerons cela plus en détail dans le cadre d’un matériau en particulier, choisi pour ses propriétés anthropoécologiques : le bois. En effet, le bois est un cas d’étude très pertinent dans la recherche sur l’intégration algorithmique de la technique, car, en plus d’être un matériau d’avenir pour ses attributs écologiques, il est suffisamment résistant pour être constructible tout en restant assez malléable et être travaillé avec des outils standards. C’est pourquoi il fait l’objet d’un choix très récurent dans les pavillons de recherches édifiés dans le cadre de ce développement. Dans l’optique d’évaluer le potentiel de cette convergence entre matière et technique, nous évoquerons un sujet en pleine résurgence théorique : les structures réciproques. Historiquement, nous verrons que ces structures ont souvent été employées soit dans le but de pallier à un manque de moyens, soit afin de parcourir de grandes distances. Par définition, une structure réciproque est un assemblage d’éléments reposant les uns sur les autres sans nécessiter de pilier central. Ils forment un réseau fermé où tous les éléments sont connectés entre eux. L’intérêt de ces structures réside dans leurs capacités à fonctionner avec un système de jointures simples, car leur schéma organisationnel est fait de sorte que pas plus de deux éléments maximum ne puissent se rencontrer au même endroit, limitant la complexité des liaisons. Cette sobriété inhérente accorde 10
ainsi d’en faciliter l’intégration technique, sous forme de jointures autobloquantes par exemple, et ces structures constituent de ce fait un terrain d’expérimentation propice au développement d’une architecture computationnelle du bois par la convergence de techniques. Afin d’appréhender plus en détail le concept de structure réciproque, nous examinerons son évolution historique et contemporaine. Nous décou vrirons ensuite comment former les schémas structurels si spécifiques qui les composent via des motifs. Ce sont des motifs particuliers qui se répètent indéfiniment sans jamais se superposer ni créer de vides. Nous verrons ensuite comment ces schémas réciproques peuvent être maintenus entre eux et les types de connexions qui se retrouvent déjà dans la production architecturale existante. Après nous explorerons comment ces schémas structurels peuvent être interprétés et optimisés en trois dimensions au travers de trois projets réalisés au FabLab de la faculté, dans le cadre de l’atelier Digital Fabrication Studio. Ces trois prototypes présenteront les difficultés liées à l’approche pratique de l’intégration computationnelle. Dans cette optique, j’ai décidé de les produire à l’aide de panneaux de multiplex, car ils représentent une belle contrainte pour l’expérimentation. En effet, le fait de travailler avec une base planaire incite dès le départ à employer des technologies de fabrication facile d’accès telle qu’une fraiseuse numérique ou une découpeuse laser, où les pièces seront profilées sur base d’un dessin bidimensionnel, limitant l’action de la machine à un simple détourage traversant. L’idée est toujours d’y intégrer la complexité technique, limitant par conséquent le besoin d’éléments complémentaires. Il s’agit aussi de soutenir une production non standard par l’utilisation d’un matériau standard. Enfin, nous revisiterons cette approche contemporaine de la fabrication par le biais de l’œuvre de Simondon. C’est un philosophe français qui a travaillé sur le problème du schisme entre la technologie et la culture, cherchant à démontrer que l’aliénation attribuée à l’avancée de la technique n’est que l’issue d’une méconnaissance de cette dernière où d’une vision technocratique, aspirant à lier machine et pouvoir. Il nous apprend surtout comment l’intégration technique est à l’origine du progrès de ce qu’il appelle les « objets techniques » et de leur « concrétisation » graduelle. C’est à dire de la façon dont les synergies techniques qui les composent fusionnent pour former de nouveaux ensembles, de plus en autonomes. Ce concept est particulièrement approprié à l’étude de ces structures réciproques, où la recherche tend à intégrer le maximum d’élément technique à leur fabrication, ayant pour finalité de leur conférer une autarcie technique conjointe d’une authenticité matérielle, elle même source d’une singularité esthétique.
11
12
2. L’ARCHITECTURE COMPUTATIONNELLE 13
Heydar Aliyev Center, Baku, Azerbaijan. Image © Iwan Baan1
2.1. L’architecture algorithmique Depuis l’antiquité, l’homme a entrepris de simplifier son activité par l’utilisation des mathématiques. Elles facilitent une réflexion préparatoire qui entend alléger un travail ultérieur. C’est particu lièrement le cas en architecture, où le dessinateur produit des informations destinées à d’autres corps de métiers. Il est nécessaire de fournir des données rigoureuses et la maîtrise du calcul en est un fondement. L’un des plus grands aboutissements de cette longue recherche est l’ordinateur. Il a permis de transformer la lecture et l’écriture des mathématiques en un langage intelligible. En architecture, ce dernier a lentement pris sa place. Mais cela ne fait qu’une vingtaine d’années que les agences acceptent de se fier à ce genre d’outils, l’essentiel de la production se faisant manuellement précédemment. Mais l’évolution des logiciels et la démocratisation du matériel contribue à généraliser leurs utilisations. Ils apportent en effet un gain de temps considérable et un champ d’action plus élargi. Mais les résultats obtenus avec l’ordinateur sont critiqués sur deux flancs : d’un côté, ils tendent à rigidifier le dessin par une incapacité à adapter le niveau de précision à la phase de la conception, et de l’autre à formuler des formes si complexes qu’elles ont fini par mettre en doute leurs réelles intégrations aux fonctions qu’elles couvrent.1
14
2.2. Le dessin algorithmique Le dessin algorithmique se fonde sur l’application d’une suite d’opérations géométriques. Il est nécessaire pour élaborer des modèles paramétriques. « La modélisation paramétrique se base sur la création de relations entre les éléments. Le concepteur peut utiliser des paramètres définis pour changer intuitivement ou pas la forme ou le comportement d’un objet. L’élasticité du modèle paramétrique permet d’introduire facilement des changements et d’élaborer beaucoup de possibilités ou d’opérer différentes simulations. »2 Afin de pouvoir aborder la suite de ce mémoire, il est nécessaire d’éclaircir ce que représente un modèle algorithmique ou paramétrique. a. Qu’est-ce qu’un algorithme Le mot algorithme viens du nom d’un mathématicien arabe Muhammad Ibn Mūsā al-Khuwārizmī (algo-) et du grec arithmos (nombre ; — rythme) « Ensemble de règles opératoires dont l’application permet de résoudre un problème énoncé au moyen d’un nombre fini d’opérations. Un algorithme peut être traduit, grâce à un langage de programmation, en un programme exécutable par un ordinateur. »3 Pour résumer, un algorithme c’est une suite d’étapes simples qui tendent vers un résultat. b. Algorithmique ou paramétrique Bien que l’architecture paramétrique et algorithmique forme souvent un ensemble, il est important de les différencier historiquement. L’architecture algorithmique est l’issue d’un système d’opérations tandis que l’aspect paramétrique implique la possibilité de changer et d’influencer les résultats de ces opérations. Néanmoins, si la conception algorithmique est liée à l’utilisation des ordinateurs, ce n’est pas le cas de la conception paramétrique. Cette dernière peut en effet être relative à des modèles physiques où les paramètres sont des éléments tangibles modifiant la forme d’une maquette adaptée à la taille d’un laboratoire. On retrouve notamment cette méthode dans la conception de la Sagrada Familia de Gaudí ou dans les structures caténaires d’Otto Freï, que l’on considère comme les précurseuses d’un nouveau mouvement théorisé par Patrik Schumacher et prénommé Paramétricisme. Exemple d’algorithme de subdivision d’un polygone en triangles2
15
2.3. Brève évolution de l’architecture paramétrique
a. Gaudí Antoni Gaudí i Cornet (1852-1926) est un architecte catalan notamment connu pour la conception de la Sagrada Familia à Barcelone. Il avait la particularité de dessiner ses édifices comme des architectures totales, appliquant la même vision des plus petites aux plus grandes parties du bâtiment. Si sa notoriété n’est plus à prouver, il nous intéresse ici pour avoir fait faire un bond en avant la recherche de solutions structurales par l’utilisation de maquettes renversées composées de ficelles et de plomb grâce auxquelles il calculait le positionnement de ses structures.
Maquette polyfuniculaire pour l’église de la Colonia Güell, musée de la Sagrada Família3
Si le modèle original de la Sagrada a disparu dans les flammes, il nous reste celui de l’église de la Colonia Güell, qui a servi de dessin préparatoire. Il est intéressant de noter que Gaudí finalise sa vision du bâtiment en peignant ensuite par-dessus une photo retournée du modèle.4 En utilisant la gravité comme générateur de forme, Gaudí met en place un procédé proche de l’optimisation paramétrique. Le résultat n’est pas prédéfini par l’architecte, il fait confiance à une réaction physique qu’il ne contrôle que par des médiums, des paramètres.
b. Freï Otto
Maquette polyfuniculaire de Freï Otto pour le Mannheim multihalle4
Vue intérieure du pavillon japonais réalisé par Freï Otto en 2000 avec Shigeru Ban5
Freï Otto (1925-2015) est un architecte allemand connu notamment pour la réalisation du stade olympique de Munich et son travail sur les structures textiles. Il a reçu le prix Pritzker 2015 quelque temps avant sa mort. Il a voué sa carrière à développer des moyens de fabriquer de grandes structures légères dans l’objectif d’aider les populations pauvres à obtenir un toit.5 Cet objectif passe par une optimisation structurelle qui à l’époque ne pouvait pas encore se faire numériquement. Il a donc entrepris une recherche bio-inspirée basée sur la conception de maquettes qui servaient à tester empiriquement ses concepts architecturaux. Analogiquement à Gaudí, Otto travaillait avec des modèles renversés où la gravité donne l’apparence à son bâti expérimentalement. Un peu plus marginal, il emploie aussi des toiles plastiques gonflées pour formaliser des dômes ou même des billes de polystyrènes attirées par des aimants afin de générer la disposition de ses éléments structurels.6 Il compose avec Gaudí les fondements d’un mouvement assez controversé prénommé Paramétricisme.7 Freï Otto, Mannheim multihalle, Biennale de Venise, 19756
16
17
c. Patrik Schumacher et le Paramétricisme Patrik Schumacher (1961 —) est un architecte et un théoricien de l’architecture allemand. Il représente Zaha Hadid Architects et cherche à délimiter le langage architectural que détermine leur architecture. Il publie à la Biennale de Venise de 2008 un article qui entend définir un style actuel caractérisé par l’avènement d’une architecture computationnelle.8 Dans cet écrit, il établit par Paramétricisme un nouveau style d’architecture, en rupture avec le modernisme par la continuité de son expression formelle, produit de l’induction d’un système d’information, contradictoirement au traçage arbitraire d’une architecture standard. « There are no platonic, discrete figures with sharp outlines. Biases, drifts, gradients, and perhaps even conspicuous singularities like radiating centres. (…) Imagine there are no more landmarks to hold on, no axis to follow and no more boundaries to cross. 1» 9 Il prétend que le Paramétricisme est le grand nouveau mouvement faisant suite au modernisme et que le constructivisme et le post-modernisme ne sont que des expériences passagères.10 Ce discours ne fait cependant pas l’unanimité, il est contredit notamment sur sa vocation à être un genre inédit, car la recherche de la forme comme étant la résultante du traitement d’une série d’informations ne date pas du XXIe siècle, comme nous l’avons vu via de l’œuvre de Gaudí et de Otto. Même si les deux architectes sont référencés comme précurseurs du mouvement, leurs travaux prouvent que le Paramétricisme en tant que style est nettement plus ancien et qu’il n’est pas forcément lié à l’utilisation des ordinateurs. Mark Foster Gage décrit par exemple le Paramétricisme de « Schumacherian Parametricism » où ce genre novateur est plutôt une avancée technologique qu’un nouveau style en soi.11 Le Paramétricisme avancerait plutôt un nouveau standard d’architecture qu’une authentique architecture non standard. De plus, si le Paramétricisme est l’évolution logique du travail de Gaudí et de Otto, son aspect contrôlé par un environnement computationnel se différencie considérablement de l’empirisme des expériences de ses protoarchitectes. Il manque donc une certaine forme d’essai et une focalisation sur l’expression architecturale, même si elle est le résultat de calculs complexes et extrêmement divers, le Paramétricisme pourrait tirer parti d’une expérimentation plus approfondie sur la matière elle-même, dans une approche plus pluridisciplinaire. Mark Burry, qui œuvre comme architecte sur la Sagrada Familia à Barcelone, soutient tout de même que le manifeste est un bon moteur de questionnement ou de critique architecturale.12 « It is surely essential that architects make good use of the manifesto as a provocation medium 2»13 1 «Il n’y a pas de figures platoniques, discrètes et aux contours nets. Déformations, déviations, radients, et peut-être même des singularités ostensibles telles des noyaux rayonnants. (...) Imaginez qu’il n’y a plus de points de repère à tenir, plus d’axe à suivre et plus de limite à franchir.» 2 « Il est certainement essentiel que les architectes fassent bon usage du manifeste comme moyen de provocation. »
18
2.4. Le modèle paramétrique a. La conversion Cela consiste à traduire les schémas, les plans, les idées en un modèle numérique capable d’être modifié à postériori. L’objectif est d’imaginer la conception du projet à partir des bases que l’on désirerait pouvoir changer à l’avenir. L’intérêt de cette démarche est de pouvoir apporter des modifications au projet sans devoir recommencer les opérations de conception. Cette façon de dessiner a aussi pour avantage de conserver toutes les étapes du processus de dessin et de pouvoir les influencer rétroactivement. On pourrait par exemple concevoir un processus de division de la façade en panneaux qui s’adaptent aux corrections morphologiques de cette dernière et en donnent les dimensions en permanence. b. La rationalisation Opération qui consiste à optimiser les besoins déterminés dans la conversion en se fondant sur des principes géométriques ou techniques. L’objectif de la rationalisation est d’arriver à passer de l’information de base au résultat de la manière la plus simple et la plus rapide possible, pour permettre au modèle d’être plus réactif et plus performant. Il y a pour ce faire deux approches : Top-Down De haut en bas, cette méthode consiste à subdiviser un sujet défini pour lui appliquer les transformations désirées. Le processus travaille de manière incrémentale et à y fait correspondre les modifications qui s’y rapportent. Dans l’exemple de la subdivision d’une façade en panneaux. Il y a ainsi une approche Top-Down. Une surface de base est morcelée en panneaux, lesquels sont alors optimisés pour s’adapter au matériau choisi, ce qui influencera ensuite le type de joint qui s’y raccordera. Bottom-up De bas en haut, cette approche consiste à établir un sujet et à lui appliquer une série de modifications qui tendent vers un résultat, lequel n’est de ce fait pas spécifiquement prédéfini. Le système se compose petit à petit jusqu’à former un ensemble cohérent. Cette méthode donne des situations plus difficiles à prédire, mais est moins lourde à prévoir étant donné que les transformations les plus complexes sont souvent liées aux détails et peuvent se faire en début de processus.
19
c. Le contrôle Une des tâches principales du concepteur est d’automatiser les parties nécessaires du projet dans l’intention d’autoriser leur modification par la suite. Une série de paramètres vient composer un tableau de contrôle du programme. Ce procédé opacifie la portion algorithmique du projet pour en vulgariser le fonctionnement. Cette organisation du contrôle permet au projet algorithmique d’être transmis, compris et réutilisé par d’autres modélisateurs. La pénalisation des contrôles du script produit un software reprenant l’ensemble des variables accessibles du projet. d. Générer et tester L’utilisation de ces paramètres sert parfois à générer une multitude de solutions et ensuite d’en analyser les résultats. Cette méthode peut se traiter empiriquement ou passer par un deuxième algorithme qui sera chargé de trouver la solution optimale. On appelle ces résultats des générations. Cette faculté spécifique au modèle algorithmique change radicalement la façon dont les designers les emploient, nous verrons plus en détail par quels moyens dans le chapitre sur la customisation de masse. Ces générations forment des « invariants par variation »14 qui malgré infinité de morphologies possibles, traduisent une ambition commune définie par leur algorithme. Il est aussi possible de ne sélectionner qu’un seul résultat d’une génération, la méthode utilisée est assez empirique et nous verrons dans ce même chapitre comment cela influence la production actuelle. e. Partager les informations Il est alors possible de traiter l’information pour l’envoyer à un autre service, comme nouvelle base à traiter, dans ce cas l’ensemble de l’historique des opérations rattachées à l’algorithme est absent. C’est une nouvelle opération de conversion qui a pour objectif la matérialisation du projet. C’est à ce moment du modèle que le choix du système de fabrication numérique doit faire son apparition, car le processus de conversion qui sera employé en est complètement dépendant. Pour reprendre notre exemple de façade subdivisée, après avoir défini l’ensemble des panneaux, il faut donc transformer cet ensemble en une série de plans indiquant leur découpe.15 La conversion peut avoir un autre objectif, celui du partage. Il s’agit dans ce cas de traduire l’ensemble des opérations en un langage de programmation standardisé, capable d’être intégré dans d’autres projets. Il est pour cela possible soit de l’employer soit dans une optique de contrôle, soit dans une optique d’intégration. Le contrôle utilise un script tel quel, variant seulement l’information à traiter. L’intégration décompose le script pour le réintroduire dans un processus différent.
20
2.5. Grasshopper – Make your own tool Il existe une multitude de milieux dans lesquels il est possible de développer de l’architecture algorithmique, Grasshopper sert de référence dans cette recherche pour sa popularité et sa facilité d’accès. « Grasshopper (GH) est un plug-in de Rhinoceros 3D, un plug-in (encore appelé module d’extension ou module externe) est un programme complétant les fonctionnalités d’un logiciel. Le plug-in GH permet de créer des modèles paramétriques sur Rhinoceros grâce à de la programmation visuelle. Un modèle paramétrique définit une géométrie dynamique où la modification de valeurs de paramètres se répercute sur l’ensemble de celle-ci. »16 Les scripts se développent en attachant des composants les uns aux autres pour former des algorithmes génératifs. Chaque composante, appelée node, a une ou des sorties qu’il faut relier aux entrées des éléments suivants, ce qui forme un système d’opérations géométriques ou mathématiques conservant l’ensemble du processus de dessin accessible.17 L’intérêt de Grasshopper consiste aussi dans sa gestion de la transparence du code où tous les éléments sont modifiables, voire même éditables même si le script qui les compose est opaque. Le script dans Grasshopper est vulgarisé, ce qui permet d’en aborder la complexité graduellement. Il est possible de partager et de télécharger des définitions qui font gagner un temps précieux. Ce procédé travaillant dans plusieurs échelles de difficulté différentes fait de Grasshopper un instrument accessible, ce qui lui vaut une forte popularité. Cette flexibilité a pour avantage de pouvoir sortir des schémas préprogrammés ancrés dans les dispositifs des logiciels de CAD, le dessin algorithmique devient un moyen de créativité et d’exploration.18 Bruce Mau, dans son manifeste propose deux points qui représentent bien la philosophie selon laquelle il est intéressant d’aborder le dessin paramétrique comme un outil hybride et surtout personnel : « 22. Make Your own tools. Hybridize your tools in order to build unique things. Even simple tools that are your own can yield entirely new avenues of exploration. Remember, tools amplify our capacities so even a small tool can make a big difference.1 » « 24. Avoid software. The problem with software is that everyone has it .2»19 1 «Faites vos propres outils. Hybridez vos outils de manière à construire des choses uniques. Même des outils simples qui sont les vôtres peuvent céder d’entières nouvelles voies d’exploration. Rappelez-vous, les outils amplifient vos capacités alors même un petit outil peut faire la différence.» 2 «Evitez les logiciels. Le problème avec les logiciels c’est que tout le monde les a.»
21
Il est difficile de proposer une définition claire du fonctionnement de Grasshopper. Néanmoins, voici un petit script déconstruit que l’on pourrait y écrire. L’algorithme est composé de quatre opérations successives et chaque opération est raccordée d’une part à l’opération suivante et d’autre part à une variable. À l’aide de trois dimensions (10, 10, 10) on conçoit un cube qui sera ensuite tourné de (30) degré et multiplié (4) fois selon l’axe (x). Toutes les valeurs peuvent être remplacées, pour créer un cube de 20x20x20 ou pour le multiplier par 10 par exemple. Le quatrième élément est un peu différent, car il puise dans l’opérateur précédent les informations nécessaires à son fonctionnement. Il déplacera verticalement (axe Z) les cubes proportionnellement à leur éloignement du cube de base. Il repère quatre cubes : le premier cube s’élèvera de 1, le deuxième de 2 et le troisième de 3, etc.
CUBE
ROTATION
10x10x10
30°
MULTIPLIER
DÉPLACEMENT
X
Z
4X
Z X
Il y en a 4
0 1 2 3
Y
Voici à quoi ressemble le script une fois programmé dans Grasshopper avec un rendu du résultat. Toutes les étapes sont accessibles et l’ensemble des paramètres sont accessibles et rassemblés sur la droite, formant le panneau de contrôle
22
2.6. Architecture algorithmique et fabrication numérique. « Digitalization is particularly fascinating in architecture because, beyond any determinism, it allows us to explore new paradigms for design and unveil unexepted spatial and material opportunities for the built environment.1 »20 La fabrication numérique2 consiste à produire un objet tangible préala blement modelé dans un logiciel de CAD21. L’architecture algorithmique a fréquemment recours à la fabrication digitale étant donné qu’elle se développe majoritairement dans de tels environnements. Mais, s’il est possible de matérialiser un algorithme formel, l’intérêt réside dans le potentiel de promouvoir d’autres façons de faire, de nouvelles méthodes. Non seulement du point de vue technique, mais aussi en proposant une nouvelle approche du travail la matière. Il existe une relation conflictuelle entre l’artisanat et la fabrication robotisée. a. Le robot et l’artisan D’après Ruskin, l’artisanat traditionnel est composé d’une part par un rapport matériau-construction et de l’autre par une inhérence anthropologique. La finalité a une dimension manifeste visuelle qui représente une valeur culturelle. Le robot n’est pas pour autant un retour à l’artisanat dans une idéologie postindustrielle. Néanmoins il devient une interprétation où les compétences manuelles, la dextérité et l’expérience incarnent un ensemble de données et d’algorithmes. Alors, seule une approche créative de la production digitale peut résulter sur un objet portant des valeurs culturelles et anthropologiques. Ce n’est pas un renouveau nostalgique de l’artisanat, mais plutôt une transformation d’une tradition de la fabrication. b. Le robot et l’architecte Dans la production en série, les robots sont rigides, élaborés pour servir un seul but. Fragiles, le moindre défaut de conception les rend obsolètes. Avec l’apparition de la fabrication numérique, ils se flexibilisent, deviennent capables d’effectuer une série de tâches qui n’est pas prédéfinie, guidée en fonction du travail à fournir. Si la fabrication numérique peut sortir le robot de son rôle répétitif, c’est à l’architecte de profiter de l’éventuelle intégration conceptuelle du robot dans le dessin et d’ouvrir l’accès à un environnement de production élargi. Le concepteur peut maintenant, en plus de dessiner les parties d’un bâtiment géométriquement, utiliser un processus de fabrication qui lui est spécifique et personnel. L’association du paramétrique à la robotique permet une infinité de possibilités en matière de réalisation, qui a pour résultat une singularisation directement liée au procédé et non plus seulement à la forme.22 1 « La numérisation est particulièrement fascinante en architecture, car, au-delà de tout déterminisme, elle nous permet d’explorer de nouveaux paradigmes de design et de dévoiler des opportunités spatiales et matérielles non exploitées pour l’environnement bâti. » 2 Appelé aussi prototypage rapide industriel
23
2.7. Sectioning, Tessellating, Folding, Contouring, Forming Dans le but de bien comprendre la suite de cette recherche, il est intéressant de définir quelques méthodes qui représentent la transformation de la matière dans la fabrication digitale. Au-delà de l’utilisation d’outils numériques (imprimante 3D, fraiseuse numérique, découpeuse à eau...). Il existe un monde de possibilités liées à la façon dont ceux-ci sont appliqués. D’après Lisa Iwamoto, on en rencontre au moins cinq : Sectioning, tessellating, folding, contouring, forming. «Digital fabrication : A way of making that uses digital data to control a fabrication process1»23 Elle soutient que si le CAD a bien remplacé le dessin à la latte et au crayon, la conception de bâtiments n’a par contre pas vraiment pris de formes différentes. Il aura fallu attendre l’arrivée des logiciels de modélisation 3D et la démocratisation de la fabrication digitale pour développer des formes architecturales différentes. Les quelques exemples qu’elle nous propose démontrent l’ingéniosité qui peut ressortir de l’utilisation de ces techniques. Ces expériences partent du principe que les bâtiments sont faits d’une série d’éléments et que l’enjeu pour les architectes est d’apprendre à en manipuler l’assemblage. Elles visent à servir de « testaments » d’une expérimentation à petite échelle qui offriront des perspectives aux bâtiments à venir.24 Cette liste est non exhaustive, elle sert simplement à visualiser une diversité de solutions associées à une technique.
2.7.1. Sectionning — trancher Il s’agit d’un travail de fabrication directement tiré de l’utilisation de la coupe en architecture. C’est un ensemble de plans de sections de l’objet superposés de manière à reproduire un modèle. Cette méthode est très similaire au fonctionnement des imprimantes 3D, qui forment leurs objets par couches successives de matériau. Il est donc possible d’utiliser d’autres matériaux dans une technique analogue, créer des tranches plus espacées et de les relier par des connecteurs dans l’axe perpendiculaire requière alors moins de matière. a. Mafoombey — Martti Kalliala, Esa Ruskeepää, 2005 Projet réalisé pour une expérience musicale, une caverne aux formes organiques représentées à l’aide de 360 couches de carton. L’accumulation donne une forme de lourdeur au projet et le carton confère les propriétés acoustiques recherchées. Cet exemple montre une manière assez littérale d’aborder la décomposition en tranche. Mafoombey — Martti Kalliala, Esa Ruskeepää, 20057
24
1 « Fabrication digitale : une façon de concevoir qui utilise des données digitales pour contrôler un processus de fabrication »
[c] space – Alan Dempsey, Alvin Huang,
20088
[c] space – Alan Dempsey, Alvin Huang,
20089
b. [c] space – Alan Dempsey, Alvin Huang, 2008 Il n’est pas nécessaire de suivre des plans de sections horizontaux ou même parallèles. Ce projet réalise une structure composée de lamelles de béton de treize millimètres d’épaisseur. Des joints en caoutchouc maintiennent toutes les pièces ensemble. Cela n’est possible que grâce à une rationalisation de la position des plans de sections, via un algorithme qui en assure la bonne orientation.
2.7.2. Tesselating – décomposer Les tesselations développées par M.C Esher servent souvent d’exemple générique pour décrire le concept. Un chapitre y est consacré plus loin dans le mémoire, mais en somme, c’est une collection de pièces qui forme un plan ou une surface sans laisser de trous. Les éléments s’imbriquent les uns dans les autres et semblent pouvoir le faire à l’infini. L’arrivée des technologies digitales engendre un regain d’intérêt pour ce type de travail. Lequel s’adapte d’ailleurs très bien dans un univers mathématique, car les tesselations sont issues de la subdivision, de la répétition et de la transformation. Ces domaines étant déjà très présents dans les modèles numériques, la tesselation fait naturellement sont entrée dans le monde de la fabrication digitale et sers souvent de guide à de nouveaux systèmes de production.
Tessalation développée par M.C. Esher avec schéma de décomposition10 Tessalation développée par M.C. Esher11
25
a. Technicolor Bloom — Brennan Buck, 2007
Technicolor Bloom — Brennan Buck, 200712
C’est un prototype grandeur nature qui représente un espace en double courbure utilisant une technique de fabrication très standard pour sa réalisation. Il est question d’intégrer structure, architecture, motif et lumière dans la même recherche formelle. La surface est segmentée et un motif est dessiné par-dessus cette subdivision. C’est tout un système de pièces qui s’agence pour former un kaléidoscope spatial. Ce projet tesselle deux fois, la première pour décomposer la surface et la seconde pour en subdiviser les parties selon un motif radial.
2.7.3. Folding – plier Plier offre la possibilité de donner du relief aux éléments plats, un peu à la manière d’origamis. C’est particulièrement utile dans la conception de structures, car cette technique a la capacité de rigidifier des matériaux sans passer par des pièces supplémentaires. Une unité matérielle qui confère aussi un assemblage souvent simplifié et une légèreté intrinsèque intéressante aux objets. a. Dragonfly – Tom Wiscombe/EMERGENT, 2007
Dragonfly – Tom Wiscombe/EMERGENT, 200713
26
Cette structure est directement inspirée de la formation des veines dans les ailes des libellules. Elles sont le résultat d’une optimisation naturelle longue et guidée par la théorie de l’évolution. Afin de reproduire la finesse interne de cet organe biologique, le designer a fait appel au pliage d’aluminium, résistant, efficace et léger, mais tout de même doté d’une certaine flexibilité. Les éléments sont déployés de manière à pouvoir se connecter entre eux, face contre face, dans des orientations particulières. C’est un bel exemple d’algorithme lié à l’optimisation formelle. On y retrouve la translation, la rationalisation, le contrôle et la génération assez expressivement.
2.7.4. Contouring – détourer La fabrication numérique dite soustractive consiste à travailler un matériau par enlèvements successifs de substance. Dans l’artisanat, on appellerait cette méthode la sculpture, mais la sculpture est un art se qui distingue par sa qualité par l’œil et l’habileté de son concepteur. Difficilement appliqué dans l’industrie et peu courant dans la culture architecturale contemporaine, l’art de la sculpture en architecture s’est peu à peu perdu. La flexibilité du robot peut ouvrir un nouveau champ de la texture et du relief dans les bâtiments. Grâce à sa capacité à traduire un ensemble et à pouvoir le travailler dans une vision subdivisée sans en diminuer la précision dans les raccordements, la fabrication digitale est un bon candidat pour le travail du relief et de la moulure. Une des grandes ambitions de cette technique est de tenter de promouvoir des matériaux de base en les faisant évoluer vers de hauts niveaux de détails. a. Design 306 — Erwin Hauer et Enrique Rosado, 2005
2.7.5. Forming – mouler
Design 306 — Erwin Hauer et Enrique Rosado, 200514
Le moulage est bien connu dans le monde de la fabrication, mais plutôt associé à l’industrie de masse et la production en série. Il est peu présent dans l’architecture, mais on dénote tout de même quelques cas, hors réalisation à grande échelle, ou un système de moulage — souvent en béton — a été développé pour les seuls besoins d’une construction. S’il n’y a pas encore de procédé digital qui supporte de ‘mouler ‘ directement une pièce, c’est une méthode courante que de transférer les propriétés formelles d’un objet d’un matériau à un autre. On fabrique par exemple un négatif qui donnera naissance au produit fini, une fois le premier matériau moulé à l’intérieur.
Design 306 — Erwin Hauer et Enrique Rosado, 200515
Ce projet est un exemple de transformation de panneaux destinés à l’architecture d’intérieur. Le relief formé cherche à produire des jeux de lumière d’une manière douce et fluide. Une des forces de ce projet est sa flexibilité : le modèle est adaptable à n’importe quel type de matériau, de taille de plaque pour seule condition qu’il soit opaque.
27
2.8. Approche computationnelle du bois Un vocabulaire de base pour approcher différents projets liés aux algorithmes dans l’architecture est maintenant mis en place. Il va aider à décrire le fonctionnement d’une série de prototypes à la fois du point de vue algorithmique, mais aussi du côté de la fabrication digitale qui leur sont souvent associés. L’objectif de cette recherche n’est pas de faire un recensement des progrès de l’architecture par le numérique, mais plutôt d’analyser comment un matériau en particulier a évolué dans cet environnement en constant développement. Parmi les matériaux présents dans l’architecture digitale, le bois se démarque particulièrement pour ses capacités physiques prometteuses et sa signification culturelle profondément ancrée dans les valeurs architecturales de l’homme.
Lamellé-collé Bois massif Brique Ciment Béton Béton armé Armatures en acier Profil en acier galvanisé Tôle en acier galvanisé
-2
-1
0
1
2
3
4
5
Kg CO2 égale Kg Matériau Comparatif des besoins énergétique pour la réalisation d’un poteau de 3 mètres de haut à sollicitation égale16
Le bois est, dans l’architecture, passé par plusieurs stades de popularité. S’il a toujours joui d’une notoriété incontestable durant l’ère préindustrielle, il a subi un déni complet vis-à-vis de l’émergence de matériaux produits technologiquement pour des usages précis comme le verre, le béton ou l’acier. Le bois pousse naturellement avec ses propriétés biologiques et il est limité par ses seules variables à savoir son espèce ou sa taille. Aujourd’hui, le secteur du bâtiment doit faire face à un très sérieux besoin de réduire ses émissions de CO2 et il est donc important de trouver des alternatives. Le bois, par sa fonction structurelle naturelle, est un des meilleurs candidats pour résoudre cette crise. Il présente des vertus écologiques comme une énergie grise très basse, une empreinte carbone positive et une praticité pour le réemploi grâce à un possible démontage, même en tenant compte 28
du processus industriel qui lui est lié. De plus, il constitue une ressource naturelle recyclable et renouvelable. L’évolution des technologies en facilite aujourd’hui la compréhension et l’utilisation de ses propriétés matérielles afin d’en tirer le meilleur parti. C’est alors tout un pan de la recherche qui compose une résurgence d’intérêt vis-à-vis du bois. C’est là où l’aspect computationnel joue un rôle prépondérant, comme dit plus haut, l’usage de la robotique accorde une innovante exploration de la matérialité. C’est le cas du bois, qui, par une série de petits pavillons, voit les limites de son utilisation repoussées au travers de multiples champs de recherches.25 Les algorithmes permettent dans ce cas de mettre à profit les nombreuses qualités du matériau afin de compenser sa ‘faiblesse naturelle’. Cette tendance promeut doucement une nouvelle architecture du bois.
600 500 400 300 200 100 0 Bois
Profil acier
Béton armé
Quantité 60 78 300 matériau(Kg) 60 561 227 Besoin en énergie (kWh) Comparatif des émissions de dioxyde de carbone lors de la production de différents matériaux de construction.17
Brique silicocalcaire 420 108
2.8.1. Le design computationnel intégré Afin de bien visualiser le potentiel du bois dans une vision algorithmique de la construction, trois pavillons ont été développés par l’Institute of computationnal design (ICT) en collaboration avec l’Institute of Building Structures and Structural Design (ITKE), tous deux de l’Université de Stuttgart. Ils explorent respectivement l’usinabilité, l’élasticité et les capacités hygroscopiques1 du bois. Ces trois pavillons ont pour volonté de montrer la possible intégration des propriétés d’un matériau directement dans le processus algorithmique de préfabrication. L’usinabilité et l’élasticité nous intéressent plus particulièrement. 1 Se dit d’un corps qui a des affinités avec l’eau et favorise la condensation., Larousse 2019
29
ICD/ITKE 2011, vue intérieure19
a. ICD/ITKE 2011
ICD/ITKE 2011, vue extérieure18
ICD/ITKE 2011, construction20
ICD/ITKE 2011, module
30
Pour explorer l’usinabilité, ils produisent un pavillon dont la composition est inspirée des coquilles d’oursins, imitant la manière dont elles sont naturellement façonnées dans le but d’en reproduire l’exceptionnelle solidité. À l’aide de plaques de bois découpées à l’aide d’une fraiseuse numérique, ils mettent en place un système de connexions en queue d’aronde permettant un assemblage presque sans clous ni vis. Le dôme est formé d’une série d’écailles hexagonales, formant des soussystèmes de blocs à la manière d’une voûte. Entièrement en plaques de bois, l’objectif est d’en visualiser la capacité à se suffire à lui-même dans son élaboration structurelle et formelle. Conservant par ce moyen une pureté matérielle et une simplicité de mise en place, le pavillon dégage une vérité physique qui s’impose sous la forme d’une combinaison peau et ossature.26 La possibilité de synthétiser les aptitudes d’une ressource et de son expression architecturale par l’intégration usinée se fait en ce cas suivant un modèle computationnel. Il réunit des systèmes constructifs (joints en queue d’aronde, voûte) via une approche biomimétique, ce qui donne un résultat léger à l’esthétique singulière. Ce pavillon montre qu’il est aujourd’hui envisageable, par l’intervention conjointe d’algorithmes et d’une fabrication numérique, d’élaborer non seulement un espace, mais aussi d’y lier expression formelle et structurelle dans une symbiose matérielle.
ICD/ITKE 2010, vue intérieure21
b. ICD/ITKE 2010 Si le bois est un matériau rigide, qui permet d’en dessiner et d’intégrer le système d’assemblage dans une seule matière, il possède aussi des propriétés élastiques. Elles sont explorées par le biais de ce pavillon, qui, par un procédé computationnel, prédit le comportement souple du bois pour calculer la forme d’une couverture. Rarement utilisé en architecture, ce comportement contribue pourtant à renfoncer ses capacités structurelles. La méthode suit les traces de Otto et de ses structures caténaires. À ceci près que ce pavillon se suffit à lui-même, presque sans ajouter d’éléments pour assurer sa cohésion. Le pavillon consiste en une série de bandes de contreplaqué découpées. Ces bandes sont préparées afin de se connecter à des distances inégales, résultantes d’un calcul destiné à maintenir les planches dans la forme désirée tout en limitant le stress à l’intérieur de celles-ci. Le matériau est courbé de manière à se stabiliser lui-même, tressé à la manière d’un panier.27
ICD/ITKE 2010, vue extérieure22
ICD/ITKE 2010, construction23
« Here the material no longer remains a passive receptor of predefined form but rather becomes a truly active generator of form. 1»28 1 « Ici, le matériau ne reste plus un récepteur passif de forme prédéfinie, mais devient un véritable générateur actif de forme. » eICD/ITKE 2010, Détail24
31
2.9. Intégration technique et accessibilité Il est envisageable de travailler le bois de manière à obtenir un produit fini en un seul procédé. Le pavillon ICD/ITKE se construit sans clous ni vis à l’aide d’un unique système de liaison. En suivant ce principe, il est aussi possible d’élaborer un design computationnel intégré contenant plusieurs éléments différents. C’est le cas du projet Wikihouse, qui propose une maison en kit, à découper à la CNC et à assembler soi-même. De la structure au marteau, un paquet de planches de multiplex et une fraiseuse sont supposés être les seuls outils nécessaires à sa réalisation. En rendant la construction aux mains de ceux qui l’habitent, la Wikihouse offre une prise de conscience de la réalité matérielle de l’habitation par l’attachement personnel au travail effectué. Néanmoins, la construction robotisée de l’habitat est confrontée à toute une série de contraintes qui rendent son application réelle limitée.
Exemples de variations de Wikihouses25
a. Le projet Wikihouse — Alastair Parvin D’après Parvin, les architectes œuvrent pour les plus riches. Il soutient qu’une idée préconçue visualise les architectes comme les têtes qui vont résoudre les problèmes du monde de demain. Dans la réalité, il y a une crise et peu d’emplois pour les architectes. Par conséquent, ils ne peuvent travailler que pour ceux qui peuvent payer, les 1 % les plus fortunés du monde. Parvin pense que ce modèle, en plus de ne pas être démocratique, n’est pas une stratégie de business très cohérente. Il cherche consent un moyen de rapporter l’architecture au 99 %, les potentiels autres clients. Le problème c’est que le bâtiment est souvent la réponse la plus chère à toute problématique. Face à cela, il est prêt à remettre en question le fondement même du métier de l’architecte, construire. Sa formation l’a en réalité bien préparé à résoudre des questions variées et y trouver des solutions innovantes.
32
La Wikihouse se découpe à la CNC. L’ensemble des pièces est étudié pour être automatiquement associé aux éléments standards qu’elle dois comporter26
33
Premier prototype fonctionnel de Wikihouse - Wiki Farmhouse28
Système de conection intégré29
Pièces détachées30
Pièces empaquetée - Wiki Farmhouse31
Montage sur site32
34
Il nous suggère pour cela un exemple : une école offre 20 millions de livres pour refaire son infrastructure, car elle est contenue dans un vieil édifice et les couloirs sont trop petits pour accueillir tous les élèves, ce qui résulte en un désordre absolu. Finalement, le bureau n’est pas revenu avec une solution architecturée. À la place, ils leur ont proposé de remplacer la sonnerie unique pour des sonneries différées, ce qui peut fluidifier le transit des étudiants sans rien construire, économisant par ce moyen des millions de livres sterling. Si cet exemple est très spécifique, assez éloigné du sujet, il nous fait remarquer que beaucoup d’argent est gaspillé dans des résolutions architecturales n’étant pas spécialement adéquates. Aujourd’hui, l’architecture est perçue comme quelque chose de grand, de massif. Les villes sont édifiées par ceux qui ont le pouvoir d’investir. Pour lutter contre ce monopolisme, Parvin soutient qu’il faut construire petit. Pour rapporter l’architecture à ceux qui n’ont pas, produire une architecture appropriée au portefeuille des gens, il propose une maison dont les plans de fabrication sont en libreservice. En suivant la voie tracée par l’encyclopédie Wikipedia, le projet Wikihouse est un système de construction open source, c’est à dire que29 tout le monde peut avoir accès à des modèles 3D en ligne, pouvant les modifier et les améliorer. Ces plans sont adaptables par les utilisateurs grâce au logiciel gratuit Sketchup. Une fois le modèle ajusté à leurs besoins, ils cliquent sur un bouton et reçoivent tous les plans de découpes nécessaires à sa fabrication. Pour obtenir les pièces, ils doivent injecter ces plans dans une fraiseuse numérique pour les découper dans des planches de contreplaqué standard. Il en résulte une sorte de kit IKEA ©, en plus volumineux, qui nous aide à monter une maison. Pas de clous, pas de vis, pas de boulons, tout
le design est intégré. L’intérêt de ce concept n’est pas que matériel, il est aussi temporel. En effet, il faut seulement prévoir une grosse journée et deux ou trois personnes motivées, sans compétence particulière, pour monter le tout. L’objectif est de produire un squelette qu’il est ensuite possible d’isoler, de couvrir et de meubler en fonction des moyens et des envies. De plus, la fabrication ayant pour base une CNC, la maison n’est potentiellement jamais finie, il est toujours envisageable de développer des éléments ou des pièces supplémentaires. Ces pièces qui pourraient être disponibles dans la base de données de Wikihouse, adaptée à chaque projet par le biais de modèles paramétriques. Il est également envisageable d’agrandir, voire même de produire la résidence du voisin. « We’re moving through a world where the factory is everywhere and the design team is everyone 1».30
Détail d’assemblage33
Un simple marteau suffis à assembler l’ensemble du projet34
1 « Nous évoluons dans un monde où l’usine est partout et où tout le monde compose l’équipe de conception ».
Système de fabrication d’une Wikihouse27
35
Charpente d’un prototype de Wikihouse35
Les quelques cas construits ont démontré que le processus est de plus particulièrement social, il rassemble les gens autour d’un projet personnel. Ces prototypes ont aussi permis à l’équipe de Parvin de tirer quelques leçons : toutes les pièces doivent être humainement transportables, elles doivent être symétriques ou clairement définies, pour éviter qu’on ne se trompe dans le puzzle ou que si l’on se méprend, l’erreur n’ait aucun impact dans le résultat. Un tel projet open source rappelle que, même si l’on travaille avec des technologies nouvelles, il ne faut pas partir de zéro, il faut copier et s’approprier des modèles préexistants. Cette approche de la construction n’a d’ailleurs rien de novateur, c’est comme cela que se faisaient les maisons avant l’industrialisation du bâtiment, en communauté. Il est nécessaire d’arrêter de traiter les citoyens comme des consommateurs, mais plutôt comme des intervenants. Le projet Wikihouse a aussi pour vocation de devenir une encyclopédie ouverte de la fabrication d’objets du quotidien.31 « If design’s great project in the 20th century was democratization of production, I think design’s great project in the 21st is the democratization of production. And when it comes to architecture cities, that really matters1. »32 Le nombre d’usagers de Wikihouse ne cesse d’augmenter et a rassemblé une communauté qui expérimente et partage ses ressentis, problèmes et solutions. Wikihouse voudrait intégrer tous ces parcours dans un logiciel paramétrique capable de produire un habitat de plus en plus 1 « Si le grand projet du design du XXe siècle était la démocratisation de la production, je pense que le grand projet du design du XXIe siècle est la démocratisation de la production. Et quand il s’agit d’architecturer les villes, c’est vraiment important. »
36
adaptable, produit d’une intelligence collective. Le logiciel devrait prévoir, en fonction de l’endroit, du type de matériau utilisé voir même des lois relatives à l’endroit où l’on construit le bon dimensionnement de la forme générale et des éléments. Le projet cherche à devenir le fondement d’une nouvelle technologie du bâtiment. On pourrait se demander s’il serait encore nécessaire d’engager des architectes. Mais Parvin admet qu’ils sont indispensables, car ils sont capables de s’en sortir dans la masse d’informations liées aux lois et à l’implémentation en général, qui sont d’ailleurs les plus grands freins au développement du projet Wikihouse.33
Huaxia Star Libary China 2018 Dot Architects, édifiée avec le système Wikihouse36
Personnellement, je ne crois pas que le cadre légal soit le seul apport indispensable de l’architecte. Même s’il devient possible de construire soi-même sa propre maison, je pense qu’il est plus fructueux d’y voir un renouement des habitants avec le milieu dans lequel ils vivent, de les responsabiliser vis-à-vis de leur demeure. Il serait intéressant d’observer des architectes collaborer ou utiliser ce projet. En effet, ils peuvent lui apporter des solutions architecturées originales, pas forcément à la portée de tout le monde, qui pourraient par ailleurs sortir la Wikihouse de sa condition générique. À mon sens il y a surtout du potentiel dans une Wikihouse dessinée par un architecte et érigée par son résident. Il est possible d’explorer ce potentiel lié au projet Wikihouse au travers du livre écrit par Matthew B. Crawford. Il y relate les enjeux liés aux pathologies engendrées par la segmentation du processus de travail et leurs impacts sur notre société actuelle.
37
b. L’éloge du carburateur Dans son plaidoyer, Crawford critique l’impact de la taylorisation de la société et cherche à rappeler au monde que l’univers immatériel dans lequel nous évoluons aujourd’hui engendre une estimation erronée de ce qu’est l’univers de l’artisanat. Pourtant son objectif n’est pas de faire ressortir une sorte de nostalgie d’un travail plus simple. La production de masse étant devenue l’un des piliers de notre société, il en résulte une standardisation globale du travail dû au besoin de produire vite et beaucoup. Cette dernière a pour conséquence d’engendrer un manque d’individualité et d’expression personnelle. Un passage de son œuvre résume à mon sens très clairement les questions qui guident sa réflexion. « Quelles sont donc les origines, et donc la validité, des présupposés qui nous amènent à considérer comme inévitable, voire désirable, notre croissant éloignement de toute activité manuelle ?34 Via de multiples exemples, il nous explique l’origine de la faille entre les hommes et les objets qui l’entourent. L’industrialisation et le travail à la chaine, qui ne nécessite quasiment plus d’investissement personnel de la part des employés, tendent à diminuer le niveau de connaissance technique et d’expertise générale ou à les déplacer vers des opérateurs ponctuels hyper qualifiés. Cette position intermédiaire dans le processus de fabrication détache le fabricant de ce qu’il produit et peut aboutir à une absence de satisfaction du travail fini et de la fierté qui devraient s’y rapporter. Tout cela est dû au procédé tayloriste qui séquence la production et de sépare les tâches de planification et d’exécution, tant et si bien que finalement personne n’est capable d’exécuter un processus au complet. Le développement des usines a aussi signifié la faillite de beaucoup de petits artisans, incapables de soutenir la concurrence. Une des premières conséquences de cela, souligne Crawford, est la disparition des cours de technologie à l’école. Sous prétexte qu’ils étaient chers et dangereux, ces outils se sont par conséquent progressivement fait remplacer par des ordinateurs. Cette transition s’est aussi faite remarquée au niveau des programmes d’enseignement, où sont aujourd’hui mis en avant tous les cours à destination universitaire. Il s’installe dès lors ce sentiment que le succès se trouve dans les études, conduisant la société vers un dénigrement général du travail manuel. Ce monde de l’usine a donc induit la standardisation des fonctions ; les libertés d’action ont été limitées, devant l’obligation de respecter un cahier des charges précis défini par d’autres. Cela crée une nouvelle distance entre les hommes et leur travail, une déresponsabilisation qui engendre une dépendance au système. 38
« Nous répugnons à ce que de simples individus concentrent trop d’autorité entre leurs mains. Avec sa déférence à l’égard des procédures neutres le libéralisme est par définition une politique de l’irresponsabilité. Au départ, cette tendance part des meilleures intentions — protéger nos libertés contre les abus du pouvoir —, mais elle s’est transformée en phénomène monstrueux qui élimine toute initiative individuelle. »35 Crawford explique que l’usinage des objets et leur production standardisée en grande quantité génèrent un processus de marchan disation où le produit est façonné pour le consommateur afin de satisfaire ses désirs sans qu’il puisse s’investir autrement que par l’argent. Cette absence d’investissement personnel pour fabriquer des objets a fait oublier à leurs utilisateurs comment ils sont produits et ces derniers présupposent qu’il serait trop compliqué ou que ce serait une perte de temps que d’apprendre à les réparer eux-mêmes. Le mystère plane sur l’origine de tous les objets que nous possédons, l’identification aux objets se fait par l’intermédiaire d’un processus de marketing où nous choisissons les caractéristiques des objets que nous achetons en fonction de nos besoins. Mais choisir, ce n’est pas créer et il est primordial de comprendre les limitations d’un tel système. L’auteur soutient que la rationalisation du système est la source d’une déresponsabilisation générale des métiers. Sa réflexion se base sur le fait que la rationalisation génère des règles bien précises et qu’elles ont tendance à couper les initiatives personnelles. Ce manque de flexibilité sur le plan du travail creuse encore l’abîme entre vie personnelle et vie professionnelle. Le travailleur ne se sentant alors plus concerné par son travail est déresponsabilisé, il œuvre pour l’intérêt d’un autre que lui. Cette déqualification des artisans serait donc due à la dissociation entre les aspects cognitifs du travail et les aspects manuels. Les employeurs, dans le but de payer moins cher leur main-d’œuvre, n’engagent que des travailleurs non qualifiés, qu’ils forment à une tâche bien précise. Cela signe ainsi la fin de l’artisan qualifié qui ne peut plus soutenir la concurrence financièrement. Cette segmentation du processus engendre en ce cas des artisans avec des connaissances restreintes et très ciblées. Cette déresponsabilisation n’est pas réservée au monde de l’artisanat, elle a touché l’ensemble de la population et si l’on souhaite remettre en place le souci de l’objet, il est nécessaire d’avoir une bonne compréhension de sa place dans l’environnement matériel duquel il dépend. Un enseignement de la fabrication d’objets ouvrirait la voie à la prise de conscience des stratégies de certaines entreprises : l’obsolescence programmée, l’idée que l’on ne peut utiliser un produit qu’à condition de le posséder, la volonté de réparer les objets cassés, ou encore la conception genrée. 39
D’autre part, rendre le plein contrôle de la fabrication de l’objet à l’utilisateur lui concède d’œuvrer dans un environnement où il pose ses propres contraintes. Cette opportunité de pouvoir développer et gérer un projet personnel peut transformer le consommateur en consommateur conscient. Parallèlement, cette segmentation s’est aussi instaurée dans l’univers du bâtiment. Seulement quinze pour cent des ouvriers seront toujours sur le chantier quand celui-ci prendra fin36, résultat d’une temporalité hachée au niveau du besoin de main-d’œuvre. Malgré tout, le monde du bâtiment n’a pas vraiment suivi la courbe de l’industrialisation, la plupart des travaux de chantier sont toujours effectués manuellement. L’architecte Pierre Bernard résume bien la raison de cette situation : « On peut repérer au moins trois facteurs, trois explications à cette résistance. La première : le rapport au sol qu’entretient tout bâtiment. (...) La deuxième explication : Il n’y a pas de distinction entre le lieu de production et le produit. (...)La troisième explication : Il n’y a pas d’objectivation du processus de production »37 Le bâtiment est donc difficile à industrialiser, car il entretient un rapport avec son contexte propre à chaque situation. On constate néanmoins une césure entre architecte et ouvrier, due au fait qu’ils ne partagent quasiment jamais leur travail. L’ouvrier ne prend pas part dans la conception et l’architecte dans la manufacture. Ce manque d’échanges est dès lors source d’incohérence et parfois même de frustrations. Le projet Wikihouse apporterait alors des réponses sur plusieurs des plans précédemment cités. Le projet rendrait le contrôle de la production de l’habitat à l’habitant, qui est donc capable de l’entretenir et qui, par-dessus tout, aura la volonté de le faire, car elle représente un investissement personnel énorme. Il supporte également le rassemblement du processus de production, de fabrication et de construction sous une même étape. Le procédé est anti-tayloriste dans son essence et offre une ouverture à tous ceux qui sont désireux de sortir de notre modèle économique. Par ailleurs, je trouve particulièrement intéressant qu’une production digitale puisse incarner le retour à un investissement personnel tangible.
40
c. Une micro-usine sur chantier Bien que la complexité d’une maison ne soit pas tant plus élevée que celle d’une voiture, le bâtiment ne peut pas être usiné selon des critères identiques. Il existe énormément de méthodes de construction et de cadres socioculturels qui rendent la conception d’édifices hautement contextuelle. Les conditions peuvent changer rapidement, même pendant la réalisation. Face à un tel besoin de flexibilité, la construction par des moyens digitaux a souvent recours à une préfabrication en usine coûteuse, car fonctionnant au cas par cas. De plus, la moindre erreur se paie cher, vu qu’il faut repasser par un système complexe pour la corriger. Apporter directement une usine sur le chantier à l’aide de petites entreprises permet d’amorcer et d’explorer une vision digitale de l’architecture sans devoir faire appel à une usine complète. Les chantiers deviendraient ainsi de micro-usines temporaires, ce qui ne privilégierait pas les grands projets des petits d’un point de vue financier par leur capacité à déployer un dispositif de préfabrication en série.38 L’échelle n’est plus un facteur d’économie et cela favorise l’individualité et la proximité. Dans le projet Wikihouse, qui tente de revisiter l’autoconstruction par l’intermédiaire de cette micro-usine, elle devient un outil indispensable à la construction. Un robot pourrait dans l’avenir avoir la même présence sur le chantier que pourrait l’avoir une pelleteuse aujourd’hui. De plus, bien qu’encore peu exploité actuellement, il y a un autre potentiel au robot de chantier qui présente beaucoup d’intérêt, il s’agit de la construction digitale hybride, robot-homme. Pour illustrer cela, dans le projet The endless wall de Gramazio & Kohler, un robot est programmé pour dresser des murs aux motifs générés algorithmiquement tout en suivant une ligne dessinée sur le sol par un intervenant. Le robot s’établit alors comme un outil interactif, capable de faire surgir l’univers digital dans le monde réel.39
The Endless WAll - Gramazio & Kohler37
41
Projet Icon38, relatif au projet FutureFactories, il s’agit d’une série de colliers, tous différents mais néanmoins reconnaissables par leurs morphologies analogues
42
2.10. Le mode de fabrication non standard FutureFactories40 est un projet ou plutôt un concept de programme où un objet change de forme en suivant une série de règles algorithmiques. Un élément novateur est entre les mains du client qui a la capacité de ‘geler’ le sujet, d’arrêter sa constante métamorphose et de pouvoir l’acheter. L’objet est en ce cas unique, impossible à reproduire, car il en existe une infinité de variations. C’est un système dit génératif, c’est-à-dire que la relation entre les intentions du dessinateur et l’objet est indirecte. Dans le design traditionnel, la relation à la matière est directe, le dessinateur explore une solution spatiale. Michael Hansmeyer propose un concept architectural analogue avec quatre colonnes imprimées en 3D, dont l’aspect final est le résultat de la décomposition en fractale d’un cube. Présentant un esprit baroque, ces éléments d’architecture ont des proportions similaires tout en présentant une morphologie unique. Il questionne la texture en architecture et comment l’évolution de la fabrication digitale pourrait influencer la production de reliefs, une surface lisse ne demandant pas plus de travail qu’une surface complexe41. Dans cette approche générative du dessin, le résultat est l’issue d’une méthode de modifications, de création et d’autonomisation de règles et de dispositifs. Le dessinateur n’agit plus directement sur le sujet. Il y a à ce moment-là une infinité de variantes, que l’on appelle générations.
a. Objectiles Gilles Delheuze décrit ces objets comme « Objectiles ». Fruits d’une production dite non standard, ce sont des variations d’un thème, uniques sans être singuliers. Une série de choses pourrait dès lors aujourd’hui être apparentée par une essence mathématique.42 Bernard Cache illustre ce procédé avec l’exemple de l’ombre d’une pyramide : elle qui diffère tout au long de la journée, mais reste profondément liée à la forme de la pyramide et ne peut s’en détacher. L’ombre est ce qu’il appelle un invariant par variation, qui se situe à mi-chemin entre l’invariance totale et la variation absolue. Certaines opérations géométriques sont aussi considérées comme des invariants, l’isométrie, l’homothétie, projection et topologie reproduisent, mais conservent les propriétés formelles d’un objet. Aujourd’hui, il est possible de manipuler tous ces invariants ensemble et former de l’architecture invariante par variation.43
Colonnes de Michael Hansmeyer, également uniques mais reconnaissables par leurs morphologies analogues39
b. La dimension économique La valeur des objets industriels de nos jours est liée à notre système de production, dont le but est de fournir un maximum de copie d’un objet. Plus il y a d’objets, plus on rentabilise les machines. De ce fait pour faire du profit il faut énormément produire et vendre un maximum. Le principe de la sérialité non standard en design est maintenant vieux de vingt ans et son potentiel et ses limites ont été testés par l’architecture d’avant-garde dans les années nonante, contrairement à la production mécanique, en chaine, la fabrication digitale facilite l’utilisation de la technologie dite file to factory et rend théoriquement possible la fabrication de masse de variations, dans ses limites, sans coûts supplémentaires. Cette n’offre donc pas d’économie d’échelle. Mais tous les produits n’ont pas vocation à être personnalisables. Mario Carpo nous propose l’exemple d’une valise, dont les dimensions sont standardisées avec les mêmes 43
normes que les soutes à bagages qui doivent les contenir. Les avions et les valises sont dessinés selon un standard identique, une personnalisation de masse de ces valises aurait donc peu d’intérêt, car c’est sa standardisation qui facilite son utilisation.44 c. L’essai et l’erreur Les artisans traditionnels, n’étant pas nécessairement des ingénieurs, élaborent des objets par succession d’essais et d’erreurs. Ils confectionnent une chaise, si elle casse, ils la refont jusqu’à ce qu’elle ne cède plus. Aujourd’hui, le design computationnel s’utilise de la même manière pour simuler un maximum de solutions possibles et ensuite d’en examiner aléatoirement autant que possible, jusqu’à en trouver deux ou trois qui correspondent aux attentes. C’est comme fabriquer une infinité de chaises et ensuite de toutes les tester pour vérifier si elles cassent. Sélectionner alors la moins lourde de toutes celles qui ont résisté en donnera probablement la meilleure version. Cette méthode est limitée, mais marche cependant assez bien compte tenu de la rapidité avec laquelle les ordinateurs sont capables de l’accomplir. Les calculs structurels développés par les ingénieurs sont plus économiques et malins, ils cherchent à définir à l’avance si la chaise cassera ou pas. Avec le temps, nous nous sommes ainsi mis à faire plus confiance aux ingénieurs qu’aux artisans. Mais aujourd’hui, ces nouvelles approches liées à la conception algorithmique recréent un enthousiasme pour ce procédé de recherche empirique, cependant Carpo s’inquiète d’y voir un mécanisme où cette recherche ‘à tâtons’ génère une méconnaissance généralisée de la raison des succès ou des échecs. Il y a par conséquent un fossé qui se creuse entre la théorie et le fait accompli. Ce manque de connaissances théoriques est aggravé à mon sens par la complexité vulgarisée des langages algorithmiques. L’auteur conclut en soulignant que la stratégie non standard tirera le maximum de ses capacités si les bonnes méthodes sont utilisées aux bons endroits. Chacun sa place, le standard pour un vocabulaire commun, le personnalisable pour l’individualité, l’ordinateur doit faire ce pourquoi il est bon, il en est de même pour le designer.45
44
2.11. Conclusion Au vu de toutes les réflexions qui alimentent le sujet, nous pouvons conclure que l’algorithme, et par extension le robot, sont d’abord des outils, qui viennent par conséquent avec leurs techniques et leurs résultats. Tout nouvel instrument apporte son lot de savoirs sans forcément dénaturer l’importance d’un autre. Il n’est pas nécessaire que la fabrication robotisée transforme l’artisanat en hobby nostalgique. Il est également peu vraisemblable que la vulgarisation de la fabrication digitale rende le contrôle et le savoirfaire des produits aux consommateurs. Ce n’est pas une connaissance de l’objet que de maîtriser le lancement d’une machine à l’aide d’un plan. Comme le soulignait Carpo, il est probable de voir plutôt une approche empirique de la fabrication, essais et erreurs sans compréhension profonde. Néanmoins, si je ne pense pas que la démocratisation de la technologie donne au consommateur de réelles compétences manuelles, il est possible que cela le rende plus responsable. Le sentiment d’avoir participé à l’élaboration de l’objet ou du bâtiment engagerait peut-être l’acquéreur à mieux s’en occuper et à trouver les moyens de les réparer au lieu de les remplacer, une économie plus durable, donc. Vis-à-vis de l’architecte, l’algorithme et sa fabrication semblent avoir deux penchants, d’un côté il simplifie la vie et le travail par l’intermédiaire d’outils pré-écrit, comme dans le BIM, de l’autre il autorise l’exploration de nouveaux procédés de production. L’algorithme est aujourd’hui présent dans presque tous les modes de dessins de l’architecture, mais son application est très variable. Cependant, son utilisation doit être adaptée à la taille des bureaux et des projets qui l’emploie. Chacun sa place, et c’est important. Par exemple, le projet Wikihouse ne devrait pas avoir vocation à produire des ensembles de logements, il rentre plutôt dans le cadre d’une architecture autoconstruite, personnelle. Bien qu’il cherche à démocratiser la construction, j’ai le pressentiment que le projet s’apparente plutôt au désir particulier d’un habitant bricoleur que d’un réel besoin. Néanmoins, l’approche du projet est très intéressante, car elle unifie le procédé de conception au dispositif constructif, il faut peut-être imaginer le projet tout de même porté par des architectes, capables d’aller encore plus loin dans le détail du projet, qui, une fois terminé, peut être livré d’une manière assez similaire. Certains architectes sont de nos jours plus familiarisés avec les outils numériques qu’avec le travail manuel. Une forme de conflit peut prendre place face à l’incompréhension des deux parties. Ainsi peut-être serait-il fructueux de voir émerger une catégorie d’architecte en symbiose avec son mode de construction, qui contrôle et connaît l’intégralité du processus de fabrication de son œuvre. Je pense cependant que cela ne fonctionnerait qu’à une échelle particulière de projet. En effet, si le projet est trop grand, l’architecte ne peut pas en gérer toutes les facettes. L’aspect constructif se retrouve alors dans les mains d’experts, un architecte formé sur les notions de design 45
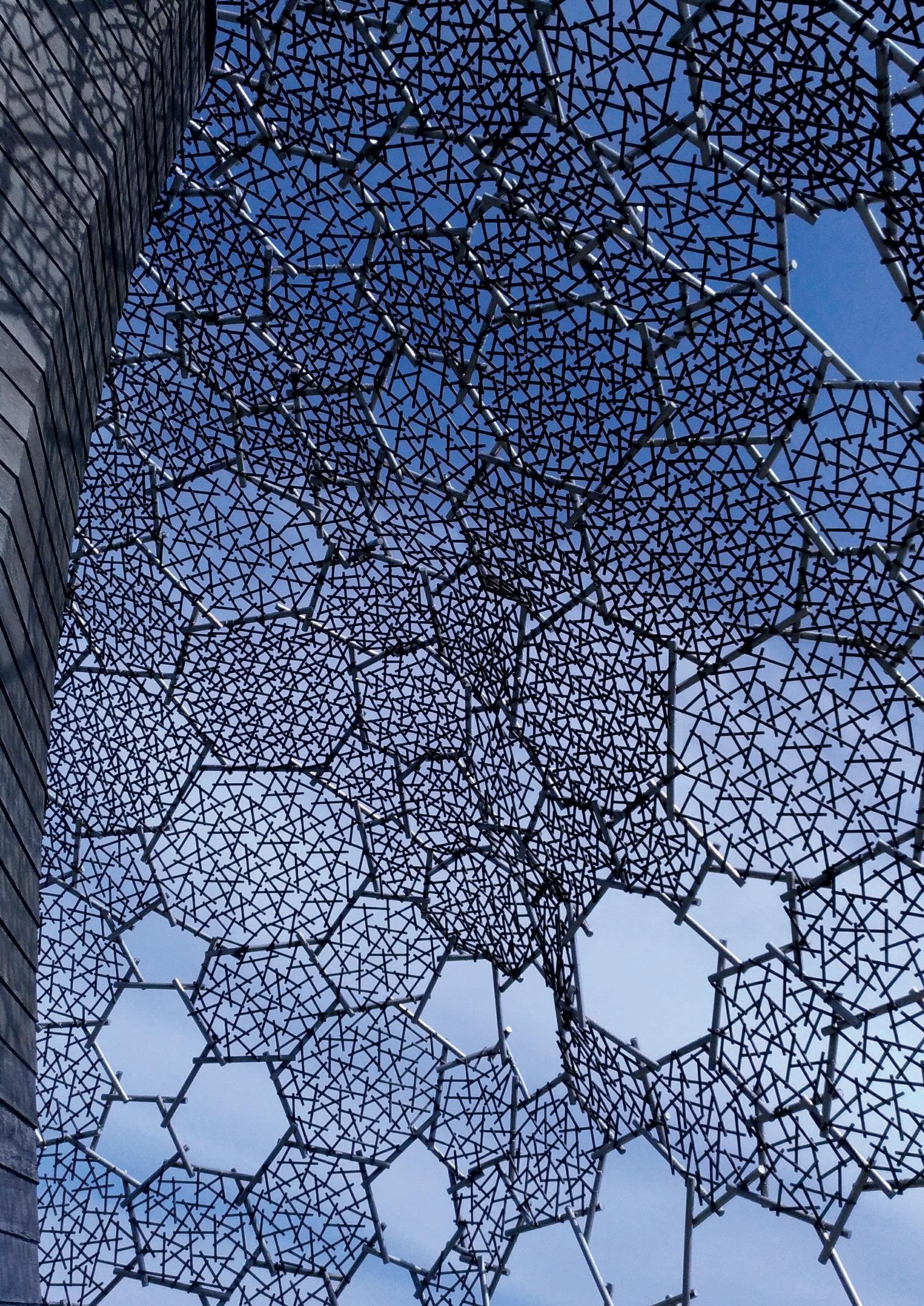
computationnel intégré n’a plus lieu d’être. Cette architecture, de taille modérée donc, permettrait à un architecte bien préparé de retrouver une sorte d’architecture totale par le numérique. La diversité proposée par la fabrication numérique offre une solution pour sortir la petite architecture du mode de production standard par des possibilités d’intégrations quasi infinies et une rupture avec l’économie d’échelle. Pour finir, la fabrication numérique est un outil standardisé et qui a besoin de l’être, comme la valise décrite par Carpo. Il légitime un travail collaboratif et un partage de ressources intellectuelles. Copier, ce n’est pas forcément négatif surtout avec un élément généré algorithmiquement qui a l’avantage de contenir à la fois son résultat et son processus. Il peut ainsi être réadapté et réintégré d’un projet à un autre. Ce mode de production de l’architecture n’est ni plus simple ni plus efficace, mais différent. Cependant, l’issue devrait tout de même rester liée au style de l’architecte et non pas à un style prédéfini comme pourrait l’avancer le Paramétricisme. a. Assemblage, motif et réciprocité Afin d’approfondir le sujet, je me suis plongé au cours d’un semestre sur l’étude de l’approche computationnelle intégrative. J’ai pour cela examiné beaucoup de projets et de pavillons du point de vue de leur assemblage, de la forme, de l’accessibilité. J’ai ensuite monté un projet analogue au projet Wikihouse — dans son principe construction — en visant à transformer une surface quelconque, complexe ou non, en un réseau de pièces à assembler sans clous ni vis. Bien qu’un peu plus théorique, ma recherche vise aussi à fabriquer à l’aide de planches découpées avec une technologie standard et abordable. Mon objectif est d’évaluer à quel point une telle technologie est facile d’accès et de voir s’il est possible d’approcher un concept de construction d’une manière personnelle, de prendre le contrôle du processus de conception et de confection. Je me suis particulièrement intéressé au travail du bois, pour des motifs globalement équivalents à ceux cités plus haut. Pour propulser une pareille recherche, il est essentiel de cibler une certaine technique, nous aborderons pour ce faire l’étude ce que l’on appelle les structures réciproques afin d’en revisiter l’application. Nous verrons dès lors de quoi il s’agit dans la seconde partie du mémoire, mais il est important de comprendre les raisons qui ont motivé ce choix. Cette technique, traditionnellement présente dans l’autoconstruction, a la particularité de présenter un déficit structurel pour une facilité de mise en place. Elle se matérialise sous la forme de motifs nécessaires à induire la réciprocité entre les éléments, tous les éléments soutiennent et son supportés dans un cercle de forces. Ces motifs aux esthétiques singulières peuvent donner lieu à un archétype d’architecture original. Cette pratique véhicule aussi des valeurs culturelles qu’il m’intéressait d’employer et de revisiter. Assemblage, motif et réciprocité peuvent être algorithmiquement recomposés d’autant de manières possibles que l’architecture algorithmique se plaira à explorer. 46
47 Photo du Centre Frans Masereel, à Kasterlee 40
48
3. LES STRUCTURES RÉCIPROQUES OU NEXORADES 49
Principe de la structure réciproque où chaque personne soutient et est soutenue par une autre dans un cercle fermé.41
3.1. L’architecture des structures réciproques Avant d’aller plus loin, il est essentiel de bien définir ce que désignent conjointement les structures dites réciproques, les cadres réciproques, ou encore les nexorades. Ces termes sont très méconnus du monde de l’architecture bien que de plus en plus d’articles essaient de populariser le sujet. Les structures en cadres sont une notion déjà bien déterminée, l’important est de visualiser ce que représente l’ajout de la réciprocité. Les structures réciproques ou cadres réciproques sont une configuration de grille structurelle tridimensionnelle composée de minimum trois éléments. L’agencement de nexorade le plus simple est de disposer des poutres dans un circuit fermé où chaque pièce est supportée par sa précédente à un bout et fixée de l’autre côté. Dans leurs arrangements plus complexes, elles composent des structures dont l’intérêt est d’être capables de former des surfaces à doubles courbures. Les éléments mutuellement supportés sont placés tangentiellement autour d’un point central et forment un polygone intérieur. L’autre bout des pièces constitue par conséquent un polygone extérieur. Ce système est souvent utilisé, car il ne nécessite pas de colonnes internes, il est adapté à la création de couvertures. Dans le cas d’une toiture hémisphérique, le polygone central peut servir de lumière zénithale.
50
Il est envisageable de faire varier énormément l’expression visuelle et structurelle de ces assemblages en changeant le nombre d’éléments, leurs longueurs et les rayons internes et externes définissant leur situation. Il est possible, et ceci sera développé plus loin, de multiplier les cadres réciproques pour former une trame, encore plus flexible, libérée par son besoin réduit en appuis. Le nom « Reciprocal frames » aussi appelé cadres réciproques provient du designer Graham Brown, qui déployait ce type de structure en Angleterre, désignant par le mot réciproque la façon dont les éléments se supportent les uns les autres. Les caractéristiques géométriques de ce genre de structures produisent des architectures aux schémas circulaires ou polygonaux qui, lorsqu’ils sont réguliers, ont l’avantage de n’exiger qu’une seule et même longueur pour tous les fragments. L’organisation fonctionnelle et la division des espaces internes de l’architecture en RF1 diffèrent fondamentalement des plans rectan gulaires classiques. Sans la nécessité de structures au sein de la forme, il résulte un volume architectural libre et flexible. Cette méthode diffère aussi des systèmes structurels cylindriques traditionnels (comme les yourtes), car les éléments ne se rencontrent pas dans un point central précis. Cela engendre un effet visuel spiralé qui apporte un considérable impact esthétique qui, combiné à cet espace libéré, crée une architecture spécifique aux cadres réciproques. Un des potentiels majeurs de ces structures est qu’elles sont capables, si les poutres sont adaptées, de parcourir des petites ou de grandes distances sans rajouter de complexité particulière. En multipliant ces cadres, il est possible d’obtenir une importante diversité de configurations structurelles tout en franchissant de larges portées. Bien que les structures réciproques aient été utilisées dans beaucoup de pays et aient endossé différentes dénominations : (Serlio-type ceiling; Reciprocal frames ou cadres réciproques, Svastica structures, Nexorades, Lever-arch structures, etc.,), elles sont peu représentées dans la production architecturale actuelle.46
1 Reciprocal frame - Cadre réciproque l’abréviation RF est communément utilisée dans les textes qui les décrivent pour éviter la redondance. C’est également le cas pour RFs : Reciprocal frame system qui désigne un assemblage de cadres réciproques.
51
3.2. Brève histoire des structures réciproques Il est difficile de retracer l’origine même de ce procédé, car il est très peu documenté ou différemment nommé. Cette technique étant majoritairement composée de bois, a mal résisté dans le temps et n’a pas transféré d’empreintes physiques. On peut néanmoins observer la transmission de cette méthode dans les structures temporaires tels les tipis ou les hogans Navajos, qui nous laisse croire qu’elles sont présentes depuis longtemps. Les cadres réciproques se seraient développés dans tous les continents parallèlement, bien que les plus anciennes sources proviendraient d’Asie. Vers la fin du XIIe siècle, un moine bouddhiste du nom de Chogen (1121-1206) aurait réalisé un système de solives spiralées dans la construction de temples. Ces structures y auraient apporté une valeur mystique du fait de leur esthétique. Malheureusement, il n’existe aujourd’hui aucun reste tangible de tels monuments même s’il est possible d’identifier cette technique dans l’actuelle charpente japonaise. On en retrouve aussi dans l’Europe médiévale, où l’architecture et particulièrement les paliers étaient façonnés à l’aide de poutres en bois. Les édifices prenant de plus en plus de volume, il devenait nécessaire de trouver des éléments de plus grandes longueurs. Le maître d’ouvrage, s’il en avait les moyens, pouvait importer de plus gros troncs de l’étranger, dans le cas contraire il fallait envisager des alternatives pour couvrir les portées exigées. Au Moyen-Âge certains étages étaient fabriqués à partir de quatre solives posées les unes sur les autres, comme vu précédemment, mais dans une composition planaire.
Structure d’un tipi Sioux42
Hogan Navajo43
52
Entre 1225-1250, l’architecte Villard de Honnecourt étudie à son tour quelques configurations pour « construire à l’aide d’éléments trop courts ». Cela témoigne d’une connaissance préalable de ces structures étaient par conséquent déjà utilisées depuis longtemps même s’il n’est pas possible d’en déterminer exactement l’origine.
Grille structuelle de palier medievale. (Dessin de A. E. Piroozfar.)44
Assemblage planaire de Honnecourt. (Dessin de A. E. Piroozfar.)45
Un peu plus tard, Léonard de Vinci (1452-1519) en continue l’exploration en proposant les premières trames complexes composées d’une série de cadres réciproques. Sa recherche visait à créer un système structurel à l’aide d’une multitude de petits éléments. Il a aussi étudié un pont reprenant les principes de la réciprocité, mais dans un autre axe, d’ores et déjà expérimenté en Chine, ce pont reste néanmoins aujourd’hui une référence en matière de structure autoportante.47
Assemblage planaire de Serlio . (Dessin de A. E. Piroozfar.)47
En 1537, Sebastiano Serlio (1475-1554) publie l’esquisse d’un grillage assez semblable à celui de Honnecourt où il montre comment composer un palier où les solives sont légèrement trop courtes. L’objectif est de travailler un plancher carré de 4,5 m de côté avec des poutres de 4,2 m de long. On remarque qu’il entaille le matériau afin de les emboîter les uns dans les autres. Il y a là une nette différence avec les croquis précédents où les éléments n’avaient qu’un seul point de contact.
Assemblage planaire de de vinci et pont autoportant . (Dessin de A. E. Piroozfar.)46
John Wallis (1616-1703) présente ensuite en 1695, dans son Opera Matematica, une nouvelle version de cette composition de palier. Il prétend être le premier à découvrir ce genre de trame, et il « serait peu probable qu’il ait été au courant de travail effectué au préalable par Honnecourt ou de de Vinci ».48 Il aurait réalisé une de ces structures à Oxford en 1649 et aurait par contre effectivement été le premier à proposer une analyse structurale, bien qu’incomplète, de ces systèmes en 1670.49 Il est possible de constater que les recherches sur les RFs sont majoritairement portées par le besoin de franchir combiné avec le manque de moyens pour le faire. Cette technique représentait déjà un enjeu économique important et nous verrons qu’elle continuera de le faire, tout du moins en Europe. Les limitations techniques de l’époque maintenaient les configurations sous la forme d’un grillage répété ou d’une courbure simple. Il est maintenant intéressant d’observer la production architecturale du siècle dernier et plus particulièrement l’effervescence de pavillons issus de la rencontre entre les cadres réciproques et l’architecture algorithmique.
Illustration des analyses de structures réciproques de John Wallis48
53
3.3. Exemples contemporains Dans cette section, nous allons aborder quelques exemples d’archi tectures réciproques réalisées ce dernier siècle en Europe et au Japon. Ces deux zones géographiques sont mises en parallèle, car elles représentent deux visions de l’architecture réciproque : là où l’Europe cherche une innovation technique, l’architecture japonaise emploie le langage des structures réciproques pour favoriser l’expression.
3.3.1. En Europe a. Toit lamella En 1920, Friedrich Zollinger, un architecte allemand met au point un système appelé toit lamella en réponse à la crise de logement occasionnée par la Première Guerre mondiale. Composé initialement de bois, il propose des édifications économiques adaptées à la reconstruction du pays.50 Ce système se base sur les structures réci proques et permet un montage bref et simple de grande couverture à partir de petites solives. Ce principe structurel consiste en un motif entrecroisé d’arches de relativement courtes tailles. Lesquels sont liés ensemble par des charnières pour former une structure en losanges emboîtés. L’ingéniosité du dispositif est double, premièrement une méthode de jointure efficace réduit le nombre de raccords nécessaires, aboutissant à un assemblage rapide, deuxièmement il résulte une bonne résistance grâce au réseau des éléments.51 Organisation d’une structure lamella49
Structure de toit en lamella50
54
b. Serpentine Gallery Pavilion 2005 Réalisé par Alvaro Siza, Eduardo Souto de Moura et Cecil Balmond (Arup), ce pavillon revisite la toiture lamella à travers la fabrication digitale.Le pavillon tente de s’implanter dans la topographie avec l’ambition de former un ensemble cohérent. À l’intérieur, la toiture dégagée de supports laisse un espace libéré et aéré idéal pour prendre un café en journée où bouquiner le soir, il sert également d’espace de conférence et de débat durant l’été. Plutôt que de suivre des lignes ou des courbes continues, les arêtes de la structure sont saccadées. Balmond introduit dans ce projet la notion d’Arte Povera, en utilisant des matériaux de bases et des techniques simples pour créer de la richesse d’expression. Cette étude tente aussi d’instaurer un lien historique et géographique, de prouver qu’une collaboration internationale peut porter ses fruits sans rendez-vous tangible. En effet les trois intervenants se sont organisés sans jamais se rencontrer physiquement, sans pour autant dévaluer la qualité de la planification. Le Serpentine pavillon devait être fabriqué et construit rapidement et économiquement. C’est pourquoi il était intéressant de travailler avec du bois comme matériau principal. Les connecteurs devaient par contre être réalisés en métal alors Arup a développé un programme complexe capable de définir la forme de chacune des pièces afin qu’elles soient compatibles avec ces derniers. Chacune des solives est différente et par conséquent les ouvertures engendrées également. Elles ont donc été remplies par des panneaux de polycarbonate sur lesquels est chaque fois fixée une lampe solaire, captant l’énergie la journée pour la déployer le soir et illuminer le pavillon de l’intérieur. Les poutres sont raccordées ensemble à l’aide d’une technique traditionnelle en tenon et mortaise, les cavités destinées à ces dernières sont d’une telle précision que de simples chevilles suffisent au maintien de la couverture. 52 Il y a donc une association fructueuse d’un procédé classique avec une approche algorithmique, Alvaro Siza résume bien cette approche : « Everything new has a lot of history in it.1 ».53 1 «Tout ce qui est nouveau comporte une part d’histoire.»
Serpentine pavillion 200551
Serpentine pavillon mortaise et tenon54
Organisations de la structure 53
Serpentine pavillion 200552
55
Cette référence architecturale est un point crucial dans cette recherche, elle détaille une approche high-tech combinée avec un montage high-tech. Ce projet propose une démarche qui, bien que complexe à dessiner, n’est pas difficile à mettre en place. Cette structure tire un véritable parti des capacités liées aux cadres réciproques. On peut remarquer que les éléments qui la constituent sont d’une épaisseur considérable, car le système est moins résistant dû à l’utilisation d’une matière similaire pour le joint et la poutre. Il n’y a de ce fait pas d’optimisation de la rigidité du matériau à l’endroit où les forces sont les plus conséquentes. C’est pourquoi le bois est un enjeu aussi important, en tant que source économique et écologique, il est envisageable de troquer un peu de matière contre une mise en place simplifiée. De plus, l’épaisseur des pièces affirme la présence du motif lié aux cadres réciproques. Le pavillon est un résultat équilibré entre les besoins et les attentes. c. Metropol Parasol
Détail structurel des cadres réciproques55
Metropol parasol56
56
En 2004, un concours est organisé pour la rénovation de la Plaza de la Encarnación à Séville, l’architecte berlinois Jürgen Mayer H. propose avec les ingénieurs d’Arup une mégastructure free-form en bois, résultat de la fusion de six ‘champignons’ de 28 m de haut, destinés à fournir de l’ombre à la place sévillane. La structure est dessinée en générant une multitude de coupes suivant une trame orthogonale composée de carrés de 1,5 m de côté. La structure est si massive qu’elle est surmontée d’un parcours panoramique et intègre un restaurant. Ce projet est toujours basé sur le principe de la réciprocité, mais une telle échelle induit des changements majeurs, surtout du point de vue de la résistance des matériaux. Comme vu plus haut, une des grandes forces des cadres réciproques est leurs capacités à travailler avec des raccords simplifiés, voire intégré. Dans le cas d’une structure de cette taille, le bois n’est plus suffisamment robuste que pour pouvoir supporter des efforts aussi considérables. Différents éléments ont donc dû être employés pour parvenir à maintenir l’édifice. Les fondations sont en béton, les éléments en Kerto (une forme très performante de lamellé-collé) et les jointures en acier. Les pièces font jusqu’à 3 m de haut et 16,5 m de long, pour une épaisseur dépassant les 30 cm. L’absence d’enveloppe externe de la structure
la rend fragile aux efforts de torsion et il a par conséquent fallu contreventer les composants par des diagonales métalliques. Cette même contrainte laisse cependant le bois à la merci des intempéries, particulièrement vis-à-vis du soleil fort présent dans le climat local. Les ingénieurs ont par conséquent décidé de passer sur tous les éléments une couche de polyuréthane. Cette technique a par ailleurs ouvert une nouvelle voie aux structures en bois apparent. Les fondations ayant des capacités structurelles restreintes au vu de la forme complexe de l’édifice, l’interconnexion a donc représenté le plus grand défi de cette construction. De plus, la charpente étant visible, il est judicieux de limiter l’impact visuel de ses connexions. Chaque pièce étant unique, il a fallu développer un dispositif de jointure modulaire, facile à assembler et supportant les tolérances. La solution définitive est un système liant des tiges de métal collées à l’intérieur du bois et reliées à leurs voisines via un pivot, laissant à la structure une part de flexibilité, d’ailleurs nécessaire. Une fois tous ces paramètres déterminés, ils ont calculé l’ensemble des réactions internes et des couples de forces de la totalité de la structure pour en vérifier la sécurité et l’optimiser, il a fallu pour cela créer un modèle mathématique tenant compte du gabarit et du poids de chacun des éléments, pour donner un ordre d’idée à la complexité du processus, il a fallu plusieurs jours aux
Metropol parasol57 Metropol parasol58
Metropol parasol59
57
machines pour quantifier le résultat final. Il a ensuite été retransmis aux fabricants pour tailler toutes les pièces à la fraiseuse dans des planches de bois de 10mx3.6m. 35 000 percements ont tout de même été effectués manuellement, destinés aux tiges métalliques. Des nacelles particulières ont même été utilisées afin de pouvoir faire passer une personne au travers des ouvertures de 1,5 m.54 La mise en place des structures réciproques est totalement en corrélation avec le matériau qui la compose et ses propriétés inhérentes. Metropol parasol est un bon exemple des problématiques encourues par ce genre de procédé à une telle échelle. Malgré toutes les complications, le projet aura su aboutir, mais pas sans doubler son budget initial, majoritairement dû au délai engendré à la recherche.55 C’est pourquoi il est intéressant de continuer cette recherche en amont, il est envisageable de populariser ces techniques dans la fabrication numérique. La plus grande partie du projet résidant dans la formalisation du ‘puzzle ‘, une connaissance avancée de la génération de structures réciproques pourrait conduire à une importante démocratisation du free-form en général. Aujourd’hui beaucoup d’études suivant cet objectif se présentent sous la forme de pavillons aux aspects tous plus originaux les unes que les autres. Le prochain chapitre en illustrera quelques-uns afin de se faire une idée globale de la diversité de la production lorsque le facteur de l’échelle supporte un travail rapide et localisé.
Metropol parasol60
Metropol parasol61
3.3.2. Au Japon Les exemples les plus élégants d’un usage contemporain des structures réciproques se trouvent au Japon. Il n’est pas surprenant de constater l’efficacité de l’architecture japonaise dans l’emploi de cette technique compte tenu de sa renommée et son savoir-faire séculaire en construction bois. Le travail des solives au Japon est très développé, surtout vis-à-vis des joints, pensés pour résister aux tremblements de terre, fréquents dans la région. Parallèlement, un style d’édifice appelé Sukiya apparu dès le XVe siècle est une forme courant de l’architecture japonaise prévalant « Un Monde d’associations avec les bâtiments où le fondement traditionnel pour les matériaux naturels, la simplicité et la proximité de la nature dominent chaque détail de la composition ». Le mot sukiya désigne une maison de thé, dans sa signification élémentaire, mais comprend en son sens plus large toutes les architectures des structures des maisons de thés traditionnelles. D’un point de vue architectural, cela représente le ton paisible et raffiné de la richesse japonaise d’antan. Le sentiment de calme est produit par une décoration discrète et la présence d’une structure apparente, principalement en bois. On peut retrouver cette intention dans l’architecture réciproque japonaise contemporaine. 58
Théatre de marionnettes de Seiwa - Auditorium62
Théatre de marionnettes de Seiwa - Salle d’exposition63
a. Théâtre de marionnettes de Seiwa Le théâtre de marionnettes Bunraku exécuté par Kazahiro Ishii se trouve à Seiwa, au sud du Japon. C’est un complexe formé de quatre édifices : un théâtre de marionnettes, un auditorium, une salle d’exposition et un café combiné à une boutique. Les bâtiments sont tous réalisés avec une charpente en bois, trois d’entre eux utilisent une structure réciproque totalement intégrée dans l’expression architecturale et deux d’entre eux se démarquent particulièrement. Premièrement, la salle d’exposition, inspirée des écrits du moine dénommé Chogen relaté précédemment, se compose de deux structures réciproques en spirale, l’une dans le sens horlogique emboîtée dans une autre orientée dans la direction opposée. Un double enroulement de ce genre réduit les risques d’effondrements en cas de tremblement de terre. Si un élément d’une spirale vient à se défaire et casse la boucle des forces, sa subordonnée a la faculté de reprendre la stabilité de l’édifice. Dans la même optique, il n’y a aucun connecteur particulier entre les solives. Elles ont été pré-sculptées avec précision et sont simplement posées les unes dans les autres, laissant une liberté de mouvement suffisante que pour pouvoir faire face aux chocs sismiques. L’ensemble forme un volume lumineux de treize mètres de haut qui, en plus d’être stable et résistant, combine élégance et sobriété, proposant une forme contemporaine du style sukiya.
Théatre de marionnettes de Seiwa - Salle d’exposition64
Théatre de marionnettes de Seiwa - Auditorium65
L’autre bâtiment qui nous intéresse ici est l’auditorium. Il dégage une atmosphère diamétralement opposée à celle de la salle d’exposition, c’est un espace oppressant et sombre. Il est formé d’une épaisse structure apparente composant le plafond. Les éléments sont massifs et reflètent la sensation d’un poids. L’assemblage réalisé induit des zones où les solives se rencontrent et atteignent jusqu’à un mètre 59
d’épaisseur, créant ce sentiment de massivité et de présence. Cette atmosphère a pour ambition de refléter les tristes histoires de samouraï qui sont relatées dans ce théâtre. L’architecte, Ishii, et l’ingénieur, Tadashi Hamauzu, ont développé ensemble une structure en corrélation avec son expression archi tecturale. À la fois utiles et beaux, les besoins techniques sont inhérents à l’architecture.56
Théatre de marionnettes de Seiwa - Autitorium66
« As for the most amazing pieces of architecture, it is difficult to decide what came first: the need for a particular architectural expression or the necessity to resolve it in a technically viable way. The two are part of one inseparable whole, a very refined piece of architecture.1 »57 b. L’observatoire du mont Rokko
Observatoire du mont Rokko67
Observatoire du mont Rokko68
Observatoire du mont Rokko69
60
En 2008, une compétition voit le jour pour la construction d’un observatoire au sommet du mont Rokko dans le Kobe japonais. Le concours avait pour ambition de ne pas seulement créer un promontoire pour les visiteurs, le bâtiment devrait être une destination en soi, en relation avec la synergie des monts Rokko. Hiroshi Sambuichi, en collaboration avec Arup, sort vainqueur avec une approche surprenante : Un dôme de tiges entrelacées de seize mètres de large formant une couverture partielle qui, à l’image des branches d’un arbre, limite, mais ne bloque pas complètement le soleil, la pluie ou le vent. La solution proposée par Arup s’est directement affirmée avec un système autoportant, complexe géométriquement, mais facile à construire. En prenant pour référence les cadres réciproques, Arup a développé un tissu de tubes métalliques interloqués, assemblés avec de simples connecteurs d’échafaudages et d’éléments de diamètre similaires, les seules variations résidant dans leurs longueurs. Il a donc été question de préparer un modèle algorithmique capable de fournir le plan exact d’une telle construction, d’intervenir sur la résistance structurelle ou l’impact visuel. Une structure primaire composée de cylindres de 50 mm d’épaisseur allant d’un à deux mètres de longueur, formant des cadres réciproques. Ils sont ensuite surmontés d’une multitude de cadres plus petits, donnant l’aspect enchevêtré final du dôme. Face à la complexité de la concrétisation de ce bâtiment, un modèle paramétrique a dû être réalisé pour venir à bout de l’optimisation. Si le processus nécessaire pour conduire une telle construction consiste à simplement, couper, placer et fixer des tubes métalliques, la production d’un plan d’assemblage cohérent et intelligible représente un sérieux enjeu. Une structure de ce type ne pouvait en effet pas être décrite graphiquement en deux dimensions. L’architecte a donc conçu en accord avec l’entrepreneur un plan tridimensionnel qui a permis la réalisation de l’observatoire.58 1 « Comme pour les meilleures œuvres architecturales, il est difficile d’établir ce qui arrive en premier : le besoin d’une expression architecturale ou la nécessité de la résoudre techniquement. Les deux sont parties d’un ensemble indissociable, une œuvre architecturale raffinée. » Observatoire du mont Rokko ( Photo de L. Ocvenety )70
61
3.3.3. Les pavillons En dehors de la production purement architecturale liée aux structures autoportantes, une multitude pavillons réalisés par des chercheurs, des professeurs et des étudiants ont vu le jour suite au renouveau apporté à cette technique vis à vis de l’évolution des technologies relatives à l’architecture. Il est intéressant desouligner la diversité des résultats, permise par la production de prototypes à petites et moyennes échelles. Les pavillons explorent de plus en plus profondément les possibilités de ces structures en se sourçant les uns aux autres. L’aboutissement de ma recherche est d’ailleurs d’en proposer une nouvelle, en transformant une référence en idée, comme l’ont fait les quelques exemples qui vont suivre. a. Rinus Roelof
Prototype réalisé par Rinus Roelof71
Rinus Roelof est un professeur néerlandais qui étudie entre autres sur les structures réciproques. Sculpteur de formation, il s’est servi de ses connaissances par le biais de processus numériques pour expérimenter et produire de nouvelles formes. Sa démarche a la particularité d’être ludique pour introduire le sujet. Il travaille ses structures de manière générative, c’est-à-dire que c’est la multiplication d’un élément qui définit le résultat. Il a commencé par construire des dômes en se référençant sur les dessins de de Vinci vu plus haut. Ces structures tiennent grâce à la pression exercée entre les éléments entre eux, pour pouvoir aller plus loin il fallait se défaire du besoin de la force gravitationnelle. Il a ainsi tenté de transformer l’aspect de l’élément lui-même dans le but de créer une contrainte interne à la structure. Pour les tracer, il a simplement plié un modèle dessiné sur un papier de manière à obtenir des polyèdres. La forme d’une pièce bloque alors ses voisines et inversement, il en découle un système réciproque et de ce fait autocontraint.59
Contrairement à l’observatoire du mont Rokko, où le travail est essentiellement porté sur le motif et ne comporte que des éléments sont linéaires. Beaucoup des pavillons qui vont être décrits ci-après suivent une approche où leur expression est le résultat d’un dialogue constant entre une trame et la physionomie de ses éléments. Cela rend la production des pièces plus technique, mais l’assemblage encore plus aisé.
Prototype réalisé par Rinus Roelof72
62
b. Forest Park Ce pavillon a été réalisé conjointement par Shigeru Ban et Cecil Balmond, il consiste en un assemblage de plaques de bambou reliées par leurs faces et se pliant pour pouvoir approcher la forme recherchée. Chaque fragment possède quatre connexions et est boulonné avec quatre autres éléments. Cela compose un tissage solide, mais les tensions internes tendent à déformer les pièces, qui par conséquent ne suivent pas exactement la courbure prévue. Ce défaut fait partie intégrante de l’intérêt de cette production. Les structures réciproques, de par leurs multiples points de contact, ont tendance à recevoir des forces de diverses directions qui les éloignent de leurs positions présupposées. C’est pourquoi ce pavillon est une structure comportant une fraction concave et une autre convexe. Cela nous aide à analyser la réaction des pièces vis-à-vis de ces changements d’orientation. La structure a été assemblée au sol et puis hissée et posée sur des piliers eux aussi formés de tubes arrangés réciproquement.60 Ce pavillon représente bien la façon dont ont démarré les premières recherches sur le sujet.
Forest park pavillon73
Forest park pavillon74
c. Kreod L’objectif de ce pavillon est de développer une structure économique, aussi facilement montable que démontable. Il a été réalisé dans le cadre des Jeux olympiques de Londres, avec dans le but de pouvoir être déplacé d’épreuve en épreuve rapidement. Rambøll a proposé une structure basée sur des joints en RF. En effet, les structures n’ont jamais plus de deux éléments qui entrent en contact au même endroit, ce qui rend leur montage plus aisé. Ils ont ajusté le concept d’assemblage en s’inspirant des raccords que l’ont retrouve communément dans
KREOD pavillon75
KREOD pavillon76
63
KREOD Pavillon77
les meubles en kit. Ce pavillon amorce les aptitudes ergonomiques de ce type de structures. Léger, adaptable, il démontre que les cadres réciproques ne sont pas simplement intéressants du point de vue des configurations spatiales qu’elles composent, mais aussi du fait de leurs capacités ergonomiques dans une construction facile.61
d. Undulatus
Projet Undulatus - Démonté78
Si la plupart des approches de structures réciproques sont façonnées à partir de bois, il est tout de même intéressant de constater ce que donne comme résultats l’utilisation d’un matériau flexible. C’est le cas du projet Undulatus qui traduit un motif réciproque en une série de pièces découpées dans du polyuréthane. Les morceaux sont ensuite formés en pliant le plastique le long d’une série de lignes directrices qui, par leurs courbures, sortent les éléments de leur condition bidimensionnelle. Si l’utilisation de ce matériau ne part pas d’une préoccupation écologique, elle offre un avantage certain du point de vue du transport et de l’économie d’espace. Comme dans les autres pavillons, il est possible de constater une intégration du processus d’assemblage dans le dessin des fragments. Cette structure ne nécessite d’ailleurs aucune pièce supplémentaire, si ce ne sont les câbles qui la raccordent au plafond.
Projet Undulatus - Pièces80 Projet Undulatus - installation79 Projet Undulatus - assemblage81
64
Shell nexorade hybrid 82
e. Nexorade Hybrid De nouveau, l’emploi d’une structure réciproque a été favorisé pour sa capacité à fonctionner sur base d’une multitude d’éléments courts combinés par un assemblage simple. Cependant, il se trouve que les RFs laissent apparaître une résistance structurelle faible en contrepartie. Un nouvel élément fait ainsi son apparition : des panneaux viennent rigidifier la structure en contreventant les efforts de torsion. Mais l’utilisation de plaques induit une géométrie très complexe à préparer. L’aspect dynamique des structures réciproques — c’est-à-dire que tous les fragments travaillent simultanément, sans hiérarchie — implique une efficacité limitée à une échelle de projet bien particulière. La perte d’une seule pièce fragilise grandement la structure. C’est pour cela que Mesnil, Douthe et Baverel proposent une nouvelle variété de cadres réciproques dénommée shell nexorade hybrid équipée de renfort planaire contreventant l’ensemble. La structure est composée suivant la méthode de translation — que nous verrons plus loin —, ce qui conserve la planarité de la subdivision originelle dans la structure formée. Les pièces sont connectées entre elles à l’aide de vis et d’écrous dans une sorte de système de chevilles. Un espace est découpé dans les éléments afin de pouvoir placer les panneaux sans les faire ressortir. Ce pavillon a été conçu pour avoir une durée de vie d’une année, devant supporter les aléas de la météo. D’après les estimations, la structure peut tolérer jusqu’à 700 kg et l’ensemble a été réfléchi de manière à rentrer dans les règlements européens de construction. L’objectif est aussi de faire les premiers pas dans l’utilisation de structures dynamiques et normées. La nonhiérarchie des éléments demande les calculs très complexes et parfois approximatifs, ce qui rend difficile la certification de leur résistance structurelle. Le fait de rajouter ce renfort diminue les efforts internes par dix. L’intérêt de ce dispositif est en ce cas évident, particulièrement du fait du faible accroissement de poids, de 30 % supplémentaire, pour sa réalisation.62
Shell nexorade hybrid - Forme de base83
Shell nexorade hybrid - Forme adaptée84
Shell nexorade hybrid - Détail85
65
3.4. Nexorade, nexorade hybrid, ou gridshell Si les nexorades sont très adaptées à la formation de surfaces en double courbure, c’est aussi le cas des gridshells, bien plus répandus et plus efficaces, mais dont les détails constructifs sont nettement plus complexes. Les deux systèmes partagent une règle fondamentale : le poids de la structure augmente proportionnellement à la portée franchie. Le système réciproque fonctionne uniquement en utilisant la force de la gravité, il ne peut concurrencer la résistance du gridshell, qui est précontraint pour maintenir sa forme. Les gridshells sont par ailleurs plus légers. Le shell nexorade hybrid, bien que pratiquement aussi efficace structurellement qu’une gridshell, pèsera bien plus lourd, particulièrement dû au poids des renforts planaires.63 Pour en revenir aux gridshells : « Une “gridshell” est une structure qui tire sa force de sa double courbure, mais composée d’un grillage ou d’un treillis. Il peut être basé sur n’importe quel matériau, mais est souvent fait à partir de bois ou d’acier. Les grandes portées réalisées en “gridshell” sont souvent construites en posant tous les éléments à plat dans un cadrage régulier et en les déformant par la suite afin de prendre la forme désirée. »64
Levage d’une structure Gridshell Ekilaya86
Les gridshells sont des structures qui travaillent plutôt avec l’élasticité du matériau qui les compose alors que les nexorades se stabilisent en majeure partie avec la gravité en s’imposant sa propre contrainte de pression. Les gridshells sont l’état actuel de la recherche apportée par Otto. Il est possible bien visualiser les deux approches dans le chapitre sur l’approche computationnelle du bois. Par exemple, sur les deux pavillons proposés par ICD/ITKE vu au premier chapitre, le premier se construit par addition et le second par transformation. Cette différence m’intéresse particulièrement, car elle signifie qu’un gridshells requiert l’application d’une force physique considérable pour déformer et maintenir ses composants. Il est plus simple, voire nécessaire de le faire mécaniquement. Les gridshells sont aujourd’hui plus présents dans l’architecture que les cadres réciproques, car
Shell nexorade hybrid et nexorade, graphiques structurels87
66
plus performants, mais aussi, ils ont déjà été investigués à l’aide des modèles caténaires dans le passé. Le regain de popularité au regard des structures réciproques dans la recherche algorithmique se fait plutôt via sa facilité de mise en place. C’est d’ailleurs pour cette même raison qu’on a vu ce système se développer avec Friedrich Zollinger dans l’Allemagne de l’après-guerre. Il fallait pouvoir bâtir vite avec des moyens technologiques et matériels limités. Tout l’intérêt des structures réciproques réside dans cette direction. Le fait qu’elles dépendent majoritairement d’une position dans l’espace et non d’une déformation physique rend leur condition plus statique, sans pour autant être rigide. Elles représentent un enjeu constructif plus flexible et aisé dans son utilisation. Elles s’adaptent facilement dans un plan et sa mise en place est presque didactique, car elle peut se faire par ajout successif. Les nexorades disposent donc d’un avantage sur les gridshells du fait non seulement de la simplicité des moyens à mettre en œuvre dans leurs réalisations (matériaux, technologie...), mais également en termes de flexibilité et de facilité quand il s’agit de réaliser des structures à géométrie plus complexe, car elles ne sont pas contraintes dans une déformation physique.
Nexorade, shell nexorade hybrid et gridshells graphique structurel88
Les nexorades sont ainsi basées sur un principe élégant de construction qui rend leurs constructions presque pédagogiques, mais souffrent d’une trop faible capacité structurelle. Le Shell nexorade hybrid pourrait constituer le pas en avant qu’il manque pour propulser ces structures dans de nouvelles applications.65 Ceci clôture une vision d’ensemble des nexorades et des structures qui leur sont associées. Pour pouvoir comprendre plus en profondeur le fonctionnement de tous ces édifices, il est fondamental d’appréhender plus précisément la composition des structures réciproques et comment ces pavillons ont pu être érigés. Il est sans doute intéressant d’opérer quelques allez-retour entre les concepts qui vont être décrits par après et leurs résultats tangibles, que nous venons d’aborder. 67
3.5. Composition d’une nexorade Le terme « nexorade » désigne un réseau d’une composition de cadres réciproque. Le terme a été proposé par Olivier Baverel pour définir ces structures aux multiples noms. Je compte employer moi aussi ce terme, car la langue française ne dispose pas vraiment d’une traduction pour décrire une multitude de cadres réciproques. Chaque élément constituant la nexorade est référencé comme « nexor ». Un nexor a quatre points de contact. Deux aux extrémités et deux sur sa longueur. Le mot nexor vient du latin et signifie « lien ». Une Nexorade est donc un « assemblage de nexors ». Les nexors peuvent être regroupés en formant des fans, ce sont des arrangements de trois nexors ou plus, en référence à la forme hélicoïdale qui résulte de ces agencements. Un fan équivaut en ce cas au polygone central formé par un cadre réciproque. Les fans sont étudiés selon la longueur de leurs nexors, leurs longueurs d’engagement, leurs inclinaisons, leurs sections et enfin leurs excentricités. 66 Dans le but de parler de la facette algorithmique de cette technique, je vais mettre en place un vocabulaire de base. Mais ce vocabulaire n’inclura pas les formules mathématiques développées à leur propos. Les variables utilisées les concernant dépendent de l’analyse et du problème de recherche et c’est pourquoi nous l’adopterons au travers du point de vue d’un architecte, aux connaissances mathématiques modérées et dont l’intérêt se porterait plus sur le processus d’intégration d’un tel système que de sa résolution. L’objectif étant de voir s’il est possible de le solutionner de manière algorithmique, en se basant sur des logiques découvertes par des scientifiques sans la mise en place d’un dispositif de calcul spécialisé. J’ai décidé de classer les paramètres relatifs aux nexorades en trois catégories : longueur et longueur d’engagement, inclinaison et nombre de nexor, excentricité et section. Fan
Nexor
68
a. Longueur et longueur d’engagement La longueur des nexors est bien évidemment une des variables les plus importantes de la définition d’un cadre réciproque. Elle influencera sa taille et son apparence. Il est possible que tous les éléments soient identiques, mais aussi qu’ils soient tous différents, le système devient ainsi de plus en plus irrégulier et difficile à calculer. Une trame régulière est le résultat d’une approche bottom-up, où la forme est générée à partir d’une multiplication de cette similarité. Le dispositif irrégulier est la conclusion d’une stratégie top-down, où la forme recherchée est subdivisée en une série d’éléments qui ne peuvent pas toujours être rationalisés1. 1 Voir chapitre 2.4
Longueur D’engagement
Longueur
La longueur d’engagement, définie par le ratio d’engagement allant de 0 à 1, est la portion du nexor qui fera partie de l’ouverture d’engagement, soit du polygone central au cadre réciproque.67 b. Inclinaison et nombre de nexors L’inclinaison d’un nexor représente l’angle entre celui-ci et le plan formé par son polygone externe. Il y a une relation intrinsèque entre la forme de l’ouverture d’engagement d’un RF et l’inclinaison de ses nexors. Cette relation est également relative aux nombres de nexors formant le RF. Pour des nexors de tailles similaires, plus la longueur d’engagement est grande, plus l’inclinaison est forte. Plus il y a de nexors, plus l’ouverture d’engagement est large.
Hauteur 4 nexors
Hauteur 3 nexors 69
c. Excentricité et section L’excentricité correspond à la distance entre les centres des sections de deux nexors en contact. Elle équivaut en somme à la somme de la moitié des deux sections de nexors superposés. Si cela peut paraître élémentaire, cette variable a une importance capitale. Si elle peut être facilement évaluée dans le cas d’un seul RF, elle constitue une des données les plus difficiles à calculer dans le cas d’une nexorade, nous observerons cela plus loin dans les méthodes de form-finding.
Excentricité
Section
Ces notions sont les pierres fondatrices de ce qui compose les nexorades. Ces paramètres, à l’échelle d’une structure, élaborent des motifs singuliers, nécessaires à la réciprocité. C’est la où se crée tout un jeu en relation avec l’algorithme, il faut utiliser ces variables dans le but de construire des motifs, bi ou tridimensionnels et d’y introduire des modificateurs qui leur donneront les complexités particulières qu’il a déjà été possible d’entrevoir dans les quelques exemples précédemment cités. Ces compositions sont dénommées tesselation et forment une symbiose géométrique avec les nexorades.
La réciprocité par la tesselation Pour pouvoir concevoir des structures réciproques, il faut parler de tesselation, aussi appelées motifs ou encore patterns. Ces trois mots désignent la répétition d’un ou plusieurs fragments, principalement par translation, par symétrie ou par rotation. Ce sont des compositions spatiales primordiales pour comprendre la réalisation des cadres réciproques. Nous allons d’abord approcher les concepts qui caractérisent une tesselation, ce qui nous aidera à appréhender le travail qu’une équipe de chercheurs a présenté au SYGGRAPH 20131 sur le développement d’un programme capable de générer des structures réciproques sur n’importe quelle surface à partir d’éléments tubulaires — comme pour l’observatoire du mont Rokko —. Bien que leur logiciel ne soit pas encore disponible, ils nous ont transmis un aperçu graphique très utile pour se faire une idée de la variété 1 C’est une communauté internationale de chercheurs, d’artistes, de développeurs, de cinéastes, de scientifiques et de professionnels du monde des affaires qui s’intéressent à l’infographie et aux techniques interactives. — https://www.siggraph.org/about/
70
des possibilités, des formes et des motifs que peuvent revêtir les structures réciproques. La seule et unique règle est que tous les nexors doivent supporter deux de leurs congénères. Transparaît alors un nouveau versant du potentiel de ces structures réciproques : un rapport structure-architecture intrinsèque. C’est un phénomène dénommé Deep Decoration, ou les nexorades évoluent simultanément « sur et sous la surface » effaçant la limite qui sépare ce qui est décoratif de ce qui est structurel.68 « RFs embody an interesting and close relationship between their functionality (as structures and, particularly temporary ones) and aesthetics (as architecture). Their structural language becomes an aesthetical language, mainly due to the common use of mathematical language, which RFs share with other structures we can find in Nature 1»69
d. T esselation régulière, semi-régulière, demi-régulière et apériodique Une tesselation régulière consiste en une série de copies d’un polygone de même taille et proportion sans créer de vide ou de superposition. Il n’est possible d’obtenir de tesselation régulière qu’avec des triangles, des carrés et des hexagones. Ce type de modèle régulier ne peut être constitué qu’à condition que la somme des angles entre les lignes qui se raccordent soie de 360°.
60°
90°
60°
60°
60°
60°
90°
120°
120°
60°
90°
90°
120°
Exemples de tesselation régulière89
Les tesselation semi-régulières sont des tesselations composées de plusieurs polygones réguliers et n’ont qu’une seule configuration de coins. Uniquement huit arrangements peuvent émerger d’un tel système, mais ces dernières ne sont plus nécessairement formées par les trois polygones cités plus haut. Si l’on considère plusieurs combinaisons d’arêtes il est possible d’en générer une vingtaine, appelée tesselation demi-régulière. Ces trois types de tesselations sont dites périodiques, c’est-à-dire issues d’une répétition régulière.
1 «Les RFs incarnent une relation intéressante et étroite entre leur fonctionnalité (en tant que structures et en particulier, temporaires) et leur esthétique (en tant qu’architecture). Leur langage structurel devient un langage esthétique, principalement en raison de l’utilisation commune du langage mathématique, que les RFs partagent avec d’autres structures que l’on trouve dans la nature.»
71
Exemples de tesselation semi-régulière90
Exemples de tesselation demi-régulière91
72
Il réside un dernier modèle de tesselation dénommée apériodique. Il en existe une multitude de catégories, mais celle développée par Roger Penrose (1931 —) est parfois utilisée comme référence. Elle est constituée d’une expansion de deux variétés de losanges, respectivement 36° avec 144° et 72° avec 108°. L’ensemble se forme sans amener ni vide ni superposition, mais ne peut pas se répéter par la simple copie.70
72° 36° 108°
144°
Exemple de tesselation apériodique92
Dans le cas des nexorades, ces tesselations ont surtout vocation à offrir une grille de composition pour d’autres motifs, plus complexes. Il en existe par conséquent d’autres, ou encore des mélanges. Le dessin de nexorade peut se nourrir de ces variations d’arrangement spatial, car elles peuvent découper une surface ou un volume en un groupe d’éléments ayant approximativement les mêmes longueurs tout en exprimant une esthétique attractive.
73
e. Syggraph 2013 — Reciprocal Frame Structures Made Easy Les tesselations peuvent fournir la grille compositionnelle nécessaire à la formation de nexorade, surtout par rapport aux formes complexes. Une équipe de chercheurs s’est penchée sur le sujet en essayant de produire un programme facilitant l’arrangement, la fabrication et la mise en place de nexorades basée sur des éléments circulaires, simplement posés les uns sur les autres et attachés sans condition particulière. Ils utilisent pour cela une approche algorithmique en trois étapes. La première consiste à faire la transition entre les structures réciproques et les tesselations vues au paragraphe précédent. L’originalité de cette approche est que grâce à la connexion entre structure et tesselations, il est possible de constituer des motifs expressifs et élégants, les structures réciproques, par leurs configurations homogènes, ont une esthétique discrète.
Conformal mapping93
Il est plus aisé d’appréhender graphiquement leur démarche, néanmoins il faut comprendre que dans un premier temps, ils développent le schéma structurel à plat, en utilisant ce qu’ils appellent des règles de grammaire pour façonner l’organisation des éléments dans la tesselation. Il y a une corrélation forte entre les deux, c’est par exemple la composition du motif qui confère le nombre de nexors, une tesselation avec des carrés donnera une structure avec quatre nexors. Ils font ensuite usage d’un procédé dénommé conformal mapping où la surface qui est supposée accueillir la structure est étalée à plat. Ils divisent ainsi la surface en une série de triangles qui ont la particularité de conserver les proportions de la surface guide lorsqu’elle est reformée. Ils calculent à ce moment-là les points de contacts du pattern réciproques sur la surface développée qu’ils reproduisent sur la surface originale en se servant des coordonnées fournies par les triangles conformes. 74
Transformations de tesselations en schémas réciproques94
75
Si la méthode est quelque peu complexe, elle ne produit pas encore un résultat adéquat, les excentricités entre les nexors ne sont pas correctes et les résoudre compose la troisième étape. À ce stade, le logiciel donne déjà une approximation de la forme finale, qui peut être adaptée en temps réel pour convenir aux besoins. Il est nécessaire d’ajuster la configuration de manière imprécise, car la troisième demande une certaine durée de calcul.
Repositionnement des points de contacts des nexors95
La troisième étape consiste à optimiser la connexion entre les nexors à l’aide de trois contraintes. D’abord, la contrainte de contact assure que les éléments se touchent. Ils doivent avoir une excentricité égale à la dimension de leur section. Ensuite vient la contrainte de surface, qui maintient les cadres réciproques le long de la surface guide pour ne pas perdre la forme recherchée pendant le processus. Enfin, la contrainte de conformité qui régule les angles entre les mêmes composantes d’un cadre de manière à conserver l’homogénéité de l’ensemble. Ils sont alors en mesure de donner un plan de construction et des différents éléments à préparer.71
Contrainte de contact96
Résumé du procédé97
76
Photo du Centre Frans Masereel, à Kasterlee, la structure réciproque est laissée apparente et confère une sérénité à l’espace, un jeu de relief supplémentaire est peint directement sur les éléments. La structure est esthétique dans son authenticité. 98
f. Deep Decoration Ces mêmes chercheurs évoquent le lien entre les tesselations et l’élégance qui se dégage de ces structures, ils les comparent à des nids d’oiseaux, faits de petits morceaux de bois, simples et discrets.72 Les nexorades développent une relation étroite entre leurs langages structurels et esthétiques. Tout comme leurs éléments, ils évoluent réciproquement à travers une expression mathématique commune, que les nexorades partageraient avec certaines structures naturelles. C’est pourquoi nous les trouverions belles et raffinées. Nina Rappaport soutient qu’il y a en ce moment une transition dans l’architecture où la structure devient de plus de plus fréquemment un générateur de forme. Le design de structures doit former un tout avec son environnement culturel et technologique. Le travail de l’ingénieur ne correspond plus seulement à valider les intentions d’un architecte en les impactant au minimum. Concevoir des structures doit retourner à un art intuitif et créatif. Cette inventivité structurelle est d’autant plus primordiale qu’aujourd’hui ces dernières peuvent prendre des formes qui sont les résultats d’un tout nouveau langage. Cet intérêt s’est doucement manifesté par une culture émergente du biomimétisme. En essayant de copier les relations entre les éléments d’un même corps organique comme une éponge de mer ou la structure de nos os, les structures ont démontré pouvoir faire partie intégrante des corps qu’elles soutiennent. Surgis à ce moment-là le concept de Deep decoration, 77
qui consiste à intégrer la structure comme partie du projet où la partie et le tout forme un ensemble expressif. Conjointement, elle propose de conjuguer à ce concept un autre dénommé subtle innovation où la structure et le projet se combine au travers d’une technologie adaptée, et sur mesure. Elle apporte une touche d’originalité qui offre au projet ce nouveau vocabulaire, lui offrant l’opportunité de manifester ses intentions jusque dans les détails les plus subtils. Elle donne comme exemple la pyramide du Louvre, réalisée spécifiquement pour que les carreaux de verre qui la compose aient l’air détachés, flottants.73
Loi de la perception de la théorie Geshtalt99
« In the synthesis of structure and form, structure as deep decoration combined with subtle innovation has evolved from a new culture of technology and design, shaping complex space and resulting in a structurally led design theory. This new structural theory reveals a space that parallels the understanding of the complexity of natural structures, leading to an even more expansive potential for a new structural paradigm and design aesthetic 1»74 L’attractivité visuelle jointe aux nexorades peut venir d’une part de son agencement formel discret, mais donc aussi dû à sa corrélation directe avec les tesselations. On peut tenter de comprendre comment s’y lient esthétique et satisfaction par le biais de la théorie de la perception de Gestalt. Proximité, groupement et clôture démontrent que les motifs créent des continuités et visuelles et des jeux de relations entre les formes. Cette continuité se différencie particulièrement des structures standards par son absence de hiérarchie. Le motif et la surface qui le contient grandissent ensemble à la manière d’un organisme. Les structures réciproques sont une forme de biomimétisme involontaire. Mais si copier la nature porte souvent ses fruits dans une étude d’optimisation et de fonctionnalité, ce n’est pas nécessairement vrai pour l’esthétique. L’œil humain peut reconnaitre instinctivement des formes organiques, mais ce n’est pas pour autant que ces formes constituent de bonnes structures. Elles doivent plutôt être bioinspirées, dans le fondement même de leurs conceptions. Une structure esthétique bioinspirée ne cherche donc pas à imiter la nature, mais à en décrypter les règles, et ce par le moyen des mathématiques.75 Cette relation entre mathématique, nature et structure est propice au développement d’algorithme qui à leurs tours, explorent de plus en plus profondément le potentiel des nexorades. 1 «Dans la synthèse de la structure et de la forme, la structure en tant que décoration profonde combinée à une innovation subtile a évolué à partir d’une nouvelle culture de la technologie et du design, façonnant un espace complexe et aboutissant à une théorie du design structurellement dirigée. Cette nouvelle théorie structurelle révèle un espace parallèle à la compréhension de la complexité des structures naturelles, conduisant à un potentiel encore plus large pour un nouveau paradigme structurel et une nouvelle esthétique de conception.»
78
3.6. L’élément La recherche sur le rapport entre les nexorades et les tesselation est en plein essor. Mais, dans l’optique de conserver le fondement discret et subtil de cette structure sans hiérarchie, il est fondamental de considérer la question des connexions. Une classification de base, proposée par Joel Gustafson les répertorie selon leurs modes de productions, assemblages et apparences. Cependant, il est important de d’abord lister les types d’éléments avant d’en venir à leurs connexions. D’après Baverel et Larsen76, il est possible d’en dénoter quatre : les barres, les anneaux, les blocs et les plaques. Ces éléments sont déterminés par la façon dont ils se lient. Ces types de structures sont dites entrelacées et fonctionnent comme un textile. Chaque élément est responsable du soutien des autres et par conséquent de son propre maintien, d’où la pertinence du terme réciproque. Les barres sont les éléments en vigueur dans la majorité des exemples que nous avons vu auparavant, ils sont fins et sont définis par leur excentricité, longueur d’engagement et nombres de nexors. Les anneaux à l’inverse sont rarement présents, car difficiles à fabriquer à grande échelle. Ils agissent selon le même principe qu’une cotte de mailles. On peut y dénoter deux types d’arrangement appelé Borrome et Hopf. Si l’on enlève un anneau au diagramme de Borrome, aucun des autres éléments n’est lié, ce qui n’est pas le cas dans le diagramme de Hops. Il est possible de retrouver ce type d’agencement dans des tables de l’Afrique de l’Ouest où les anneaux sont taillés ensemble dans la même pièce de bois afin d’assurer la connexion.
Arrangement de Borrome
Arrangement de Hops
Table originaire d’Afrique de l’Ouest100
Pont Truchet biais, G. Fallacara Universidad San Pablo, Madrid, 2007.101
Il est aussi possible d’obtenir des arrangements réciproques à l’aide de blocs. Un bloc est défini par le fait qu’il a des dimensions équivalentes dans les trois directions. Il se rapproche plus directement des tesselations, car ils sont formés par leurs simples extrusions. Ils fonctionnement analogiquement à une voûte bien que les éléments ne sont pas juste posés les uns sur les autres, ils ont une morphologie qui leur permettent se contraindre mutuellement. 79
Il reste une dernière classe d’éléments particulièrement intéressante dans cette recherche, car c’est celle qui supporte la meilleure intégration aux procédés de fabrication numériques. Les machines fonctionnent majoritairement dans deux dimensions dans l’élaboration de dessin complexes, la troisième ne sert souvent qu’à assurer des paliers horizontaux comme dans les imprimantes 3D. Les structures réciproques basées sur les plaques peuvent donc profiter du plein potentiel de l’architecture algorithmique sans avoir recours à des technologies trop avancées. Bien que l’écart entre les plaques et les barres soient parfois ténus, ce sont tous deux des stratégies et par conséquent des résultats fondamentalement différents. Warner Blaser a développé une série de meubles inspirés des struc tures réciproques qui donne un bon aperçu de l’approche intégrative que les planches concèdent. Il a mis un point d’honneur à tirer avantage de la surface dans la construction de ses nœuds77. Même si la plupart de ces expériences ont une vocation esthétique, on y rencontre une forme d’intégration subtile, bien qu’issue d’un autre contexte. Meubles dessinés par Warner Blaser102
Chaque triangle correspond à un arrangement de nexors.103
D’après Baverel et Pugnale, il est possible de distinguer trois catégories de nexorades basées sur des éléments planaires. La première se développe similairement aux configurations en barres, mais tire parti de son épaisseur pour y inclure un système de jointures particulier. On retrouve par exemple dans cette catégorie plusieurs constructions citées précédemment telles que le Serpentine pavillon 2005, Metropol parasol ou encore le shell nexorade hybrid. Dans la deuxième catégorie, les connexions sont rassemblées dans la superficie de la pièce. L’élément planaire est alors composé de plusieurs nexors définis par ses arrêtes. Il existe une dernière catégorie qui se définit par sa non-concordance avec les deux autres. Baverel nous propose deux exemples, le premier où le nexor induit un moment de flexion, démontré dans une vision revisitée du pont autoportant réalisé par de Vinci et le second où il transmet cette fois les forces de compressions.78
Strcuture réciproque en plaque par transmition de compression104
Adaptation du pont autoportant réalisé par de Vinci105
80
Adaptation du pont autoportant réalisé par de Vinci Détail106
Structure réciproque en barre ( Dessin de Gustafsson ) 107
Structure réciproque en anneaux ( Dessin de Gustafsson ) 108
Structure réciproque en blocs ( Dessin de Gustafsson ) 109
Structure réciproque en plaque verticale ( Dessin de Gustafsson ) 110
Structure réciproque en horizontale ( Dessin de Gustafsson ) 111
81
3.7. La connexion Si les blocs et les anneaux peuvent créer des assemblages autobloquants par leur seule source de leur morphologie, ce n’est pas le cas des barres et des plaques, qui peuvent avoir recours à des éléments supplémentaires dans le cas où leurs connectiques ne sont pas intégrées. La connexion est ainsi un aspect fondamental de la composition des nexorades, car elle influe à la fois sur l’excentricité, la pureté matérielle et sur l’expression formelle. Comme dit plus haut, Joel Gustafson propose dans sa thèse une classification exhaustive des types de jointures liées aux structures réciproques. Il les range en quatre catégories : superposition, raccord, cheville et encoche. Il y décrit leurs conséquences en matière de production, d’assemblage, d’apparence et de résistance.79
3.7.1. Superposition Les éléments sont simplement superposés et reposent entièrement sur les forces de frottement que la gravité produit entre eux.
Superposition ( Dessin de Gustafsson ) 112
Superposition simple ( Dessin de Gustafsson ) 113
a. Superposition simple Les éléments peuvent tout bonnement se chevaucher. Pour les structures réciproques avec ce type de connexion, la production et le montage sont relativement simples, car il n’est pas nécessaire d’utiliser d’élément de raccordement supplémentaire. Cependant, comme les composantes ne restent en place que par frottement, l’assemblage peut être perturbé par le fait que la conception ne tienne pas avant que tout le système soit bouclé. De plus, lorsque les éléments sont inclinés entre eux, de petits espaces sont créés, vu qu’ils ne se rencontrent pas face contre face. Cela réduit la surface de contact et donc les forces de frottements. b. Superposition avec coin Pour éviter ces espaces entre les éléments, il est possible de créer un décalage sur leurs longueurs. Si l’angle est intégré à l’élément, cela en complique la production, mais en facilite le montage. De plus, la section transversale est augmentée par l’ajout d’un coin, ce qui accroît résistance de l’ensemble.
Superposition avec coin ( Dessin de Gustafsson ) 114
c. Conclusion Ces systèmes sont aussi faciles à produire que les éléments qui les constituent. Néanmoins, si l’assemblage peut sembler simplifié, il faut compter sur le fait que la structure n’est totalement stabilisée que lorsque tous les éléments sont mis en place, il est par conséquent fondamental d’être très méticuleux. Ce fonctionnement basé sur la
82
seule pression des éléments les uns sur les autres rend le dispositif fragile, car sensible à toute force différente de celle de la gravité. La grande plus-value de cet assemblage est qu’il n’endommage aucunement les pièces, qui restent par conséquent pleinement réutilisables s’il est question d’un montage ou d’un démontage. L’absence de connexions supplémentaires donne de plus une apparence pure, dégagée de tout artifice.
3.7.2. Coupleurs Grâce à un composant supplémentaire, cette famille de connexion limite le mouvement des éléments à des degrés divers. Utilisant généralement la pression pour les maintenir entre eux, il peut avoir différentes formes, singulières par leurs propriétés.
Coupleur (Dessin de Gustafsson) 115
a. Raccord avec nœuds Ce type de connexion était fréquemment utilisé dans les premiers exemples connus de structure réciproque. Ce sont des fils de fixation pouvant être faits de différents matériaux qu’il est possible de nouer, comme de la corde ou du fil de fer. L’installation peut aussi être facilitée en perçant des trous dans les composants au travers desquels les cordes peuvent être passées. Une certaine flexibilité est permise par ce procédé, ce qui en simplifie l’assemblage.
Raccord en corde116
b. Raccord avec joints de fixation Il s’agit d’un type d’assemblage courant dans les échafaudages de construction, mais rien n’empêche son utilisation avec des éléments de bois, cylindriques ou non. Tout comme les nœuds, ces pinces établissent un raccordement en augmentant l’adhérence par friction pour transférer la charge. Les principaux avantages sont que les pinces peuvent créer une connexion sous n’importe quel angle et qu’elles facilitent le montage et le démontage toujours sans endommager la pièce.
Connecteur d’échaffaudage117
c. Raccord avec étriers Une liaison de charpente courante consiste à fixer un étrier dans l’un des éléments, puis d’en laisser un autre s’appuyer dessus sur la poutre. Un étrier est un support que l’on accroche sur le côté d’une solive, sur lequel la suivante vient se poser. Une fois en place, l’étrier contraint l’élément soutenu pour les rotations et les translations. Etrier118
83
d. Conclusion Mis à part les étriers, ces connexions ne nécessitent pas, ou peu, de préoccupations vis-à-vis du matériau utilisé, particulièrement dû aux variations importantes d’inclinaison d’un élément à l’autre. Du point de vue de la réutilisation, seuls les étriers font de nouveau exception en nécessitant d’une fixation solide et donc dommageable pour la pièce. Mais dans le cas où la pièce repose simplement dans l’encoche de l’étrier, cela en facilite le montage-démontage. Cela conditionne néanmoins les possibilités d’assemblage dans une forme prédéfinie. Si ces éléments apportent une rigidité supplémentaire à l’ensemble, c’est au prix d’une hétérogénéité matérielle qui a besoin d’être subtilement dessinée pour ne pas affaiblir l’esthétique de la nexorade. Il est probablement fructueux dans de tels cas de figure de prendre en compte la notion de subtle innovation.
3.7.3. Chevilles et plaques Ces types de connexions se définissent par le fait qu’elles traversent deux éléments pour les maintenir en contact et transférer les forces de l’un à l’autre. Raccord avec chevilles119
a. Raccord avec chevilles Les chevilles sont enfoncées dans des trous creusés préalablement pour maintenir l’assemblage. L’utilisation de chevilles avec un type de bois plus résistant, ou un autre matériau plus solide que celui employé pour l’élément est une méthode traditionnelle de conception de charpente. b. Raccord avec clous ou vis Raccord avec boulons ( Dessin de Gustafsson ) 120 Raccord avec plaques dentées et les anneaux fendus combinés aux disques de cisaillement 121
Fonctionne similairement aux chevilles à ceci près qu’il n’a pas nécessairement besoin d’un travail préalable et exige de ce fait moins de justesse au préalable, mais par conséquent moins de précision dans le résultat aussi. c. Raccords avec boulons À mi-chemin entre la vis et la cheville, les boulons peuvent serrer les éléments ensemble pour plus d’adhérence. Ils accordent aussi un assemblage plus réversible de par l’accessibilité du système d’attache après montage. d. Raccord avec plaques Ils existent sous de multiples formes, mais il est possible d’en démarquer deux, les plaques dentées et les anneaux fendus combinés aux disques de cisaillement. Les plaques dentées sont une sorte de
84
configurations de clous et sont donc catégorisées comme chevilles. Cependant, le besoin d’une presse hydraulique et la faible longueur des dents les rendent peu pratiques dans l’utilisation des structures réciproques. Leurs variantes, les disques de cisaillements et anneaux fendus, sont bien plus résistants, mais sont préfabriqués à même la solive. Contrairement aux plaques dentées, le boulon n’apporte toutefois pas de rigidité supplémentaire. Ce type de jointure a aussi l’avantage d’être particulièrement discret.
Raccord avec plaque dentée122
e. Raccord avec tiges filetées collées Il est aussi envisageable, dans l’optique de camoufler la jointure pour conserver la continuité matérielle offerte par les nexorades, de placer une tige en acier directement dans l’élément et de la solidariser avec de la colle. Il est en ce cas possible d’insérer cette tige dans un autre élément, ce qui donne un résultat très résistant et invisible. f. Conclusion
Raccord avec tige filetée collée 123
Dans l’ensemble, cette classification de jointures nécessite beaucoup de préparation, soit du point de vue de fabrication des connexions, soit de l’adaptation de l’élément à ces dernières. Ces techniques offrent un assemblage aisé, mais le démontage, à l’instar des boulons, s’avère plus délicat. Cette famille contient beaucoup de typologies diverses et, par conséquent, d’esthétiques et de résistances tout aussi variables. Elles donnent néanmoins une série d’opportunités qui dépendent de la nature de la tesselation et s’adaptent à chaque situation pour une meilleure rigidité. Au niveau du montage, il n’est pas nécessaire d’être aussi méthodique et méticuleux qu’avec les superpositions pures, car tout est prédéfini en amont.
3.7.4. Encoches Variante améliorée de la superposition, la création d’une encoche contraint les éléments sans pièces supplémentaires. Il existe une diversité énorme dans cette typologie de connexions, mais elles ont toutes pour point commun d’intégrer directement la liaison à l’élément. ( Dessin de Gustafsson ) 124
a. Raccord mi-bois Les raccords mi-bois peuvent prendre énormément de morphologies différentes, mais leur dénominateur commun est que l’élément à supporter repose en partie dans l’élément qui soutient et inversement. Selon la précision de contact entre les faces des deux parties, cette liaison peut être plus ou moins rigide. L’encoche crée cependant une perte de matière, néfaste à la solidité de l’élément.
( Dessin de Gustafsson ) 125
85
b. Raccord en tenons et mortaises Dans les assemblages en tenon et mortaise, l’élément supporté s’emboîte dans l’élément qui soutient. Dans la version dénommée traversante, l’élément supporté traverse complètement l’élément de soutien et s’il dépasse de l’autre côté, il peut en plus être verrouillé à l’aide d’une encoche supplémentaire. Dans le cas où il ne traverse pas, la connexion est dite aveugle. c. Conclusion Connexion avec tenon et mortaise traversante 126
Ces joints peuvent être préfabriqués, apportés sur site et assemblés. Plus ils sont précis, plus ils sont rigides. Ils ont longtemps été taillés à la main, mais aujourd’hui, le développement des technologies de fabrication soustractive, comme la CNC, permet de les produire avec un haut niveau de finesse. Si la préparation est assez complexe, le montage est au contraire facilité, presque intuitif. Il en est de même pour le réemploi, les éléments ne sont pas endommagés étant donné qu’aucune intervention physique supplémentaire n’est nécessaire à leur maintien. L’emplacement des entailles fournit une direction assez précise à la forme finale et la flexibilité des nexorades n’est plus vraiment considérée. Cependant, c’est une des méthodes les plus discrètes en matière d’expression structurelle. L’encoche uniformise l’ensemble en lui donnant une épaisseur homogène sur toute son étendue. Néanmoins, les incisions, en réduisant la dimension de la section à certains endroits, diminuent par conséquent la résistance structurelle de la pièce. Découle de cette famille toute une série de joints digitaux autobloquants, qui tentent d’intégrer complètement au design des pièces les éléments de connexions des autres typologies. Il y a un enjeu énorme au développement de ce genre de liaison dans la fabrication numérique, car elle ouvre le champ des possibilités et favorise une forte symbiose technique. On assiste à l’émergence d’un innovant langage de construction dû à l’utilisation de ces outils.
86
3.8. Vers une jointure bois-bois intégrée Dans la construction en bois, la moitié du budget est allouée au matériau, et l’autre moitié à l’installation et aux connexions.80 Par conséquent, l’édification en bois requiert une importante démarche de planification, que l’on retrouve d’ailleurs dans les techniques de confection de charpentes. Les systèmes de jonctions intégrées sont dès lors intéressants, car s’ils demandent une certaine étude, le coût de la jointure peut être drastiquement réduit. Cela concerne parallèlement la pureté du matériau, qui maintient son expression naturelle. Il est en ce cas judicieux de minimiser l’optimisation de ce temps de préparation en recherchant des approches novatrices. L’inspiration pour de telles améliorations est souvent tirée d’anciennes méthodes d’assemblage comme les montages à mortaise et tenon, à queue d’aronde ou à dents, qui étaient des techniques artisanales courantes en menuiserie traditionnelle et en ébénisterie. Historiquement durant la prolifération de l’industrie, ces joints ont été largement remplacés par des connecteurs et des fixations à plaques métalliques fabriquées en série. Mais aujourd’hui, l’aubaine créée par les algorithmes et les technologies digitales offrent de nouvelles opportunités d’intégration mécanique et une résurgence de l’intérêt de la construction en bois. Ces joints sont souvent réalisés à l’aide d’une fraiseuse numérique et ils constituent d’ailleurs un nouveau vocabulaire dans la menuiserie.81 Ce récent vocabulaire est une réinterprétation de ces couplages traditionnels au travers des contraintes liées aux outils numériques. C’est d’autant plus important dans les structures réciproques, car le principe de composition spatiale limite les connexions à deux éléments au même endroit. Les raccords étant en général simples, il est possible de faire abondamment usage de tout ce répertoire de raccord. Ce phénomène est encore amplifié par la relation entre les nexorades et le design computationnel. Il est parfois question d’interpréter toutes les pièces d’une structure différemment et les algorithmes sont des outils indispensables pour en définir tous les détails de connexions. Il existe même un recueil de cinquante de ces jointures développées par Jochen Gros82 et destiné, grâce à sa disponibilité open source, à soutenir une large expérimentation artisanale qui elle même servira d’inspiration pour des pavillons, qui ouvriront à leur tour la voie à de nouvelles techniques de construction.
87
Recueil de cinquante jointures destinées à la fabrication numérique, développé par Jochen Gros127
88
3.9. Intégrer la recherche à la pratique Il faut s’interroger sur l’étendue de toutes ces recherches et de leurs portées dans une réalité architecturale. Si la production scientifique relative aux structures réciproques est importante, ce n’est pas le cas de son intégration à la construction. L’architecture computationnelle, par son inhérente complexité, n’est pas spécifiquement accessible. Dans ce cas, comment de telles recherches sont-elles censées aboutir dans le projet d’architecture ? Salvator-John Liotta nous propose deux approches, soit les concepteurs développent par eux même un projet de recherche, soit ils intègrent des étudiants qui ont participé à des projets similaires. Cette approche est de plus en plus fréquente, car il y a un intérêt croissant de la part des étudiants pour un retour à l’apprentissage par la construction tangible, qui les aide à sortir quelque peu de l’environnement théorique de l’université. Néanmoins, entre les petits projets expérimentaux et leurs applications plus concrètes surgissent plusieurs contraintes, notamment du point de vue légal et budgétaire. En effet le peu d’exigences liées à l’exploration architecturale au travers d’un pavillon sans fonction spécifique admet une grande liberté. Les budgets sont souvent couverts par des sponsors particuliers et peu sujets à cette pression venant des investisseurs, qui tendent à réguler le champ d’action des architectes suivant des objectifs économiques.83 Néanmoins, c’est par cette intégration de la recherche aux pratiques qu’une étude peut rentrer dans le concret et il est important pour les architectes d’envisager ce genre d’initiatives. La démocratisation digitale rend ces explorations de plus en plus accessibles et de moins en moins risquées économiquement. L’intégration d’une technique élaborée dans un contexte théorique à un projet concret est une forme de maturation qui va accorder à cette technique d’avoir sa propre autonomie, de se répandre et de se perfectionner graduellement dans la conception architecturale.
89
90
4. FORM-FINDING ET PROTOTYPES 91
Cadre de recherche En regroupant le travail sur la tesselation, la connexion et l’optimisation, on obtient un dispositif complexe, mais potentiellement solvable algorithmiquement. Dans l’intention d’expérimenter avec ce qui a été exposé plus tôt j’ai entrepris personnellement la production d’une série de prototypes de petites échelles qui emploiera, autant que mes connaissances liées à mes études d’architecture me l’accordent, les informations amassées au cours de cette exploration. J’ai pris pour objectif de proposer un système réciproque qui serait productible en utilisant une découpe en deux dimensions, afin d’en maximiser la flexibilité. Cela peut aussi limiter le besoin en matière de technologie numérique à ce qui est disponible au laboratoire (Imprimante 3D, découpeuse Laser, fraiseuse numérique), qui sont des outils accessibles pour un cabinet d’architecture classique. Le projet cherche à s’inscrire dans le même courant de réalisation que la Wikihouse, à savoir la production d’un objet paramétrable à partir d’une ressource standard, comme des planches de multiplex. L’algorithme est responsable de la transformation d’une surface guide en un système d’éléments connectables, sans éléments supplémentaires, tout en conservant l’unité matérielle et formelle. L’algorithme est écrit sur Grasshopper pour les raisons citées au début du mémoire et explorera les diverses stratégies de form-finding élaborées pour les structures réciproques. Nous en verrons trois par le biais d’autant de prototypes : par rotation, par translation et par cellules. Toutes les méthodes ne donnent pas les mêmes approximations pour les valeurs d’excentricité et donc il est nécessaire d’étudier le ou les modes d’optimisation spécifiques à chaque approche. L’utilisation de pièces planaires et d’une fabrication digitale limitée implique une symétrie entre ses deux faces. Une découpeuse laser ne peut tailler un matériau que perpendiculairement à sa surface et si une CNC peut creuser en diagonale, elle ne peut le faire que sur la face supérieure, l’autre étant collée au socle. Pour travailler les deux côtés, il faut prévoir plusieurs opérations. Or une structure réciproque a des angles de contacts très variables, il est par conséquent primordial de rationaliser cela en subdivisant la surface guide en une série de pièces adaptées au format des planches dans lesquelles elles seront découpées, ou même aux dimensions des machines qui se chargeront de cette tâche. Il faut garder en tête que cette liste de méthode n’est pas exhaustive, il en réside beaucoup d’autres et au fur et à mesure que l’investigation du comportement de ces structures ce poursuit, il en apparaîtra de nouvelles. Ces méthodes ont ainsi toutes leurs opérations d’optimisation, c’est-à-
92
dire de s’assurer que les pièces aient les bonnes mesures pour être ajustées à leurs divers points de contact. Néanmoins ces méthodes d’optimisation ne sont pas toujours accessibles et celles qui seront présentées ici sont parfois le fruit de ma propre recherche. De plus, ces expérimentations se fondent sur des structures réciproques issues et réalisées à l’aide de tesselations. Il est aussi possible de les dessiner sur base d’une conformal map84 qui reproduise un motif réciproque bidimensionnel en trois dimensions ou encore avec un algorithme génératif, qui démultiplie une règle dans une approche Botom-Up1. J’explorerai donc pour ma part une stratégie Top-Down, du point de vue d’un architecte qui cherche à avoir un contrôle avancé sur la forme de son projet.
1 Voir le chapitre sur la rationalisation dans le modèle paramétrique
93
Form-finding par rotation Une première méthode pour générer un schéma réciproque à partir d’une tesselation 3D consiste à effectuer une rotation des éléments qui la composent. Ce décalage dégage les points de contact entre les nexors et les limite à deux éléments au même endroit. Cette méthode a été développée par Baverel dans l’optique de produire des structures réciproques sur base de polyèdres réguliers, néanmoins, cette approche s’adapte très facilement à la transformation d’une tesselation. On peut la retrouver dans des pavillons comme le Reciplydome réalisé à la VUB85 où cette technique a été réemployée à l’aide d’éléments précourbés. C’est assez simple à générer paramétriquement et je l’ai ainsi choisie comme première approche pour tenter d’en comprendre les limitations et les applications.
1
2
3
4
5
94
Le processus commence avec une surface complexe arbitraire. Elle est alors divisée en une série de quadrilatères qui forment une tesselation en trois dimensions. Une rotation est ensuite appliquée aux arrêtes avec pour point d’appui leur centre et comme axe le vecteur défini par la normale de la surface à cet endroit. Le motif réciproque est ainsi visible, mais les longueurs des éléments et les excentricités sont complètement aléatoires [1]. Afin d’optimiser le modèle, j’utilise une méthode que je dénomme optimisation par intersection. Dans le but de réaliser une jointure mis-bois, en encoche. Pour cela, il est nécessaire d’obtenir une excentricité de zéro, c’est-à-dire que les nexors ne reposent pas les uns sur les autres et forment une épaisseur
homogène. L’optimisation consiste à extruder les segments le long du vecteur perpendiculaire tracé lors de l’opération de rotation [2]. Ces plans ainsi constitués aident à en calculer les intersections. Ces intersections sont les lignes de contacts entre les plans [3]. Afin de maximiser la fidélité du modèle, il faut trouver les points d’intersection se situant sur ces lignes et d’y localiser ceux qui sont les plus proches de la surface guide. Ce qui était auparavant une ligne droite se dote d’un angle par l’ajout de ce point et assure le lien entre deux pièces contiguës [4]. Il est à ce moment-là possible de modéliser les encoches de manière à pouvoir concrétiser le prototype [5]. Avant production, il est important de numéroter les fragments et de constituer un plan, car, chaque composant étant unique, l’assemblage a besoin d’être le plus clair possible. Ce prototype a été réalisé à l’aide d’une imprimante 3D, mais les pièces respectent le principe de symétrie et peuvent très bien être fabriquées différemment. J’ai remarqué que le système d’encoches génère énormément de tensions puisqu’il est nécessaire de tourner les pièces pour finaliser l’assemblage d’un cadre. Heureusement le PLA1 est un matériau flexible qui a permis de pallier ce problème, les encoches d’un prototype similaire en bois se seraient sûrement brisées à plusieurs emplacements. Cette souplesse est à double tranchant, car les stress importants présents dans la maquette l’ont déformé, ce qu’une rigidité matérielle aurait empêché. Le prototype n’est par conséquent finalement pas très fidèle à la surface guide. 1 Plastique à base d’amidon de maïs fréquemment utilisé avec les imprimantes 3D
95
La numérotation s’est révélée un enjeu plus crucial que prévu, en effet parvenir — particulièrement à l’échelle du prototype — à retrouver et déposer toutes les pièces aux bons endroits et dans le bon sens représente un travail minutieux et d’autant plus compliqué si les indications sont illisibles ou faussées. La précision de l’imprimante 3D n’a pas réussi à restituer directement les numéros, j’ai donc dû les encoder moi-même au fur et à mesure des impressions.
96
97
98
Surface guide
Subdivision
Extension
Rotation
Pré-optimisation
Extrusion
Intersection
Optimisation
Epaisseur
Encoches
Tri par axe
Plan de montage
Finalement il est possible de constater deux difficultés. La première est due au script lui-même et la seconde au matériau employé. Côté algorithme, certains morceaux de pièces sont manquants dû à une erreur de conception, fragilisant la structure à cet endroit. Avec un autre matériau, cela n’aurait pas posé de problème particulier, mais le PLA de l’impression 3D étant relativement élastique, les tensions générées dans la structure — cette tension qui maintient toutes les pièces en place — distordent les pièces et la forme de l’ensemble en général. Ce système fonctionne à la manière d’un tissage et cette tension interne empêche la structure d’atteindre sa morphologie présupposée.
99
Form-finding par translation Une seconde méthode, également développée par Baverell, consiste à opérer un décalage des éléments afin de donner une dimension réciproque à un motif.86 Cette approche part du principe que l’excentricité peut-être égale à zéro de par un type de joints spécifiques qui maintiendra les pièces entre elles sans superposition. L’abolition de cette constante permet de déplacer les lignes qui composent la tesselation tout en conservant les deux points intermédiaires attachés à ses lignes relatives. Cette méthode préserve la coplanarité des lignes par l’utilisation de la translation. La tesselation doit être par conséquent constituée de polygones plans. Il est possible de réaliser ce genre de surfaces complexes à base de triangles, de quadrilatère ou encore d’hexagones, mais il est assez rare de rencontrer ce type de morphologie en architecture. Néanmoins cette méthode conserve très bien les dimensions de la surface guide étant donné qu’elle n’exige pas l’optimisation des longueurs d’engagement. Il est toutefois requis de prévoir une opération particulière pour les bordures de la structure, elles ne peuvent répondre aux mêmes contraintes et il est donc nécessaire d’ajouter des éléments pour assurer la fermeture du circuit réciproque. Cependant cette opération se faisant a posteriori, les calculs sont plus aisés car ils ne font que répondre à une situation existante et n’influent pas sur cette dernière. Cette planarité intrinsèque a un impact fondamental sur l’issue de la nexorade. Il devient possible d’utiliser ces surfaces pour y placer des panneaux qui vont contreventer la structure, lui apportant une rigidité structurelle qui fait parfois défaut au comportement dynamique des structures réciproques. Ce constat a été fait dans une recherche dénommée shell nexorade hybrid87, vue dans le chapitre sur les pavillons de recherche. « The planar plates stiffen significantly the structure: the maximal displacement under wind load is divided by 12, with a mass increase of approximately 30%1. »88 Shell nexorade Hybrid 128
Si cette méthode à l’avantage de limiter les besoins en matière d’optimisation, l’obtention d’une tesselation où l’intégralité des faces sont planaires peut se révéler complexe, surtout pour la transformation 1 «Les plaques planes rigidifient significativement la structure : le déplacement maximal sous charge de vent est divisé par 12, avec une augmentation de masse d’environ 30 %.»
100
d’une surface pré-existante. Le prototype que j’ai produit à partir de cette technique a plus pour vocation de la réinterpréter que de la reproduire, car il ne prend pas en compte la planarisation des éléments de tesselation. La tesselation est d’ailleurs réalisée en deux dimensions, horizontalement. Le motif ainsi généré est ensuite projeté verticalement sur la forme guide. Il en découle un système de pièces réciproques dont la taille des pièces est définie par une vue en plan. Leurs hauteurs sont par conséquent inconnues et s’assurer qu’elles ne dépassent ni les dimensions de la machine ni celles des plaques se fait empiriquement test après test. Par contre, le résultat a pour avantage d’être très fidèle à la surface guide. En guise d’expérience, j’ai voulu produire un module qui démontrerait les possibilités de cette méthode à plus large échelle et qui serait en même temps capable de montrer à quoi elle ressemblerait en tant que structure de couverture. J’ai donc choisi de dessiner un banc, qui donne de ce fait un aperçu structurel et esthétique de bonne taille. La forme est réalisée à partir d’un demiellipsoïde déformé par le poids de deux modèles 3D de personnes dans Karamba, un plug-in d’analyse structurelle dans Grasshopper. Un ou deux millimètres de tolérance au niveau des trous se sont révélés nécessaires pour un assemblage aisé. Après fabrication, pour pouvoir relier les cadres réciproques, j’ai dû les monter tranche par tranche, sinon le système était bloqué. L’ensemble est dans ce cas assez facile à assembler et à démonter. Les pièces sont liées par un système en tenons et mortaises traversantes, relativement similaire à celui proposé par Balmond dans le Serpentine Pavillon 2005. Il suffit ainsi d’un marteau pour tout connecter et la structure est finalement très rigide, supportant le poids de plusieurs personnes sans problèmes.
101
Surface guide
Positionnement
Grille projetée
Soustraction des mortaises
Translation
Isolation physique
Plan 3D
Image de synthèse
Rotation des pièces en XY
Section selon le plan 102
Croube de découpe
Numérotation
Projection et épaisseur
Intersection
Position des mortaises
Optimisation de contact
Trous pour les chevilles
Position des tenons
Séparation des pièces
Zoom
Plan horizontal
Nesting - Arrangement
Plan d’assemblage
Objectif 103
104
105
Form-finding par cellules Une dernière technique proposée par Youssef Anastas, Landolf Rhode-Barbarigos et Sigrid Adriaensens89 consiste à travailler avec une tesselation où toutes les arrêtes appartiennent à deux polygones sur l’ensemble de leurs distances. La seule condition est donc qu’aucune arrêtes n’a de points de contact sur la longueur d’une autre, elles se croisent toutes en leurs extrémités [1]. Il est ainsi possible de générer un schéma réciproque en diminuant la taille des polygones [2] et en raccordant les milieux des arrêtes réduites avec ceux d’une de leurs correspondantes originales. La trame se dessine alors, connectée par les centres des arrêtes de la tesselation [3]. Cette méthode ne concède pas une optimisation directe, il est dans ce cas nécessaire de faire quelques opérations supplémentaires pour assurer la jonction entre tous les éléments. Il faut notamment prolonger les arrêtes afin d’en trouver les intersections. Il peut dans certains cas être compliqué de réaliser cette action si la tesselation présente des angles trop complexes. Il faut ensuite optimiser les excentricités si la jointure ne fonctionne pas par un système d’encoche. On emploiera dans ce cas un algorithme dit de relaxation dynamique90. C’est un algorithme qui va répéter une opération un nombre de fois assez important dans le but de tendre vers un résultat. Il n’est donc pas question ici d’une méthode mathématique linéaire n’ayant qu’une issue potentielle mais plutôt d’une recherche. Dans ce cas l’algorithme va entreprendre de rendre les lignes les plus droites possible tout en conservant les connexions entre les éléments [4]. De tels calculs sont réalisables grâce à un plugin de Grasshopper appellé Kangaroo. Ces algorithmes sont capables de résoudre ce genre de problèmes complexes, car ils solutionnent l’ensemble de l’optimisation de tous les éléments en même temps et non l’un après l’autre. Parfois il n’est pas nécessaire de rendre tous les éléments rectilinéaires, c’est le cas dans une production robotisée par exemple, où les pièces peuvent avoir des morphologies précises. Dans
106
le cas où la tesselation est composée de figures planes, il est possible d’optimiser les contacts directement grâce à cette planarité. J’ai entrepris une expérimentation de ce processus avec une tesselation sur base triangulaire, c’est une facilité, le triangle étant toujours une forme plane. Les pièces se rencontrent ainsi toutes sur le plan associé audit triangle et il est très simple d’en trouver les intersections, car il suffit d’en prolonger les arrêtes. Il est possible, à l’aide de ce plan, de calculer l’excentricité avec la même facilité, sans utiliser la relaxation dynamique. L’algorithme est ainsi grandement allégé, car l’utilisation de Kangaroo consomme énormément de puissance de calcul. L’usage de ces plans aide aussi à définir précisément dans quelle direction extruder les pièces pour procéder à leurs optimisations de jointures. Dans mon prototype, les éléments se traversent les uns dans les autres avec un simple tenon, il en est de même pour leurs connexions avec la surface. Car un grand avantage de l’emploi de ces cellules planaires est que les trois pièces peuvent être liées entre elles par une plaque, déterminée par les proportions de la tesselation, qui les empêche de sortir de leur encoche. L’ensemble forme un nœud autobloquant. Le joint est alors contraint dans les trois axes par sa couverture. Travailler avec une telle subdivision nous donne aussi les dimensions maximales de chaque pièce. Le fait que la découpe de la surface soit génératrice de la forme de la structure préserve son expression par l’utilisation d’un même matériau. Cette solution a pour avantage d’à la fois de rigidifier la nexorade et d’en assurer l’optimisation des intersections. De plus, la plupart de la production architecturale liée aux structures réciproques peine à recouvrir les surfaces complexes qu’elle génère par la suite, encore plus sans changer le langage architectural qu’elle dégage. Ces structures sont souvent recouvertes d’une toile ou de tuiles, mais parfois pas du tout. Ici, l’optimisation, la couverture et la résistance sont un seul et même procédé. Cette stratégie peut donc faire tenir l’ensemble de la structure et de la surface par la seule force de la pression. Ni clous ni vis, un simple jeu de tolérance.
1
2
3
4
Form-finding par cellule129 Sur ces images est présenté un exemple de relaxation dynamique issu de mon expérimentation personnelle, le schéma réciproque est obtenu grâce à la méthode des cellules et est ensuite introduit dans le calculateur Kangaroo de Grasshopper de manière à en rectilinéarisant les élé ments. C’est aussi très avantageux dans l’optique d’une production de pièces à base planaire, car cela permet de s’assurer que l’extrusion de l’élément reste dans un plan perpendiculaire à la surface. Dans la première trame, certains éléments possèdent des angles avec lesquels il ne serait pas envisageable d’utiliser un panneau rigide.
107
Ce prototype a pour vocation d’être un morceau de couverture et d’exprimer l’esthétique générale de la technique et son rapport à la surface guide. Le projet reproduit en ce cas une voûte posée sur quatre appuis. La structure simule suffisamment de surfaces complexes pour prouver la versatilité du concept. La partie structurelle a été réalisée avec des planches de multiplex profilés à la CNC. Il en aura fallu six, de 60x80cm, et environ dix heures de découpe pour venir à bout des 55 pièces et du ponçage dû aux irrégularités de la machine. L’ensemble coûte une soixantaine d’euros pour un peu plus d’un mètre carré de couverture en bois. Il aura fallu une dizaine de tests de jointures pour trouver le système le plus adapté. La tesselation étant triangulaire les angles au niveau des liaisons sont assez contraignants. Cela rend l’emboîtement quelquefois compliqué et il est utile d’avoir du jeu entre les pièces pour arriver à fermer le cadre réciproque. C’est pourquoi c’est finalement le simple tenon, sans complexité supplémentaire qui offre les meilleurs résultats. Le prototype est très solide une fois la couverture appliquée. Sans surprise, les parties non couvertes sont sujettes au mouvement et se décrochent de temps à autre. Seulement un quart de la couverture a été réalisé pour laisser la structure apparente lors de la présentation du projet.
Elle a été découpée dans du peuplier, plus léger que le multiplex, mais cela n’est pas néfaste à la rigidité de la structure, car elle est peu soumise au stress. Au final, il y a trois types de pièces : les plaques de couverture, les pièces internes et les pièces externes. La façon dont elles sont identifiées et dessinées est détaillée plus loin dans le chapitre Script. Avant la fabrication finale, plusieurs tests ont été effectués dans lel but d’évaluer la bonne tolérance pour un assemblage facile. Cette étape est très importante, car si mal faite, elle peut mettre à mal toute la production du projet, même si les pièces sont bien optimisées. 108
109
110
111
112
113
114
115
Vue frontale
Vue droite
Coupe
Échelle 1:10 0
116
10
20
Plan
117
Échelle 1:2 0
118
2
4
10 cm
119
120
5. LE SCRIPT 121
Résumé
DÉFORMATION La surface de base déformée donne les directives et les positions nécessaires à la formation des pièces. La déformation se fait en déplaçant les points qui la composent verticalement.
INPUT La surface de base appliquée au projet en vue d’être déformée tout en assurant des dimensions stables aux pièces. Ce prototype est basé sur un carré de 1,2 m par 1,2 m.
OUTPUT Une fois le modèle terminer il est possible d’en tirer les sections qui serviront de guide à la machine qui en exécutera les plans. Il ne reste donc plus qu’à assembler l’ensemble. 122
TRIANGULATION Le script pour fonctionner se base sur une division de la surface en polygones planaires. Il est possible de le faire fonctionner avec n’importe quel polygone, mais le triangle assure par sa topologie la planarité nécessaire au travail sur base de planches.
MOTIF — FORM-FINDING Sur base du polygone défini juste avant, le script dessine le pattern réciproque de manière à ce que toutes les lignes soient correctement en contact et ne passent que par deux polygones l’optimisation rallonge les lignes et trouve leurs intersections respectives, ce qui nous aide à connecter tout le système.
L’OPTIMISATION DE CONTACT Afin de donner du volume au système, il faut s’assurer que les volumétries n’entrent pas en conflit et que le modèle résultant soit emboîtable. Le script recherche les intersections et évalue la distance minimum à retirer pour ne pas toucher ses pièces voisines.
L’OPTIMISATION DE JOINTURE Le script dessine les additions et les soustractions de volume dans le but d’éviter au système que le prolongement de certaines pièces ne soit en conflit avec le volume d’une autre. L’objectif est dans un premier temps de trouver toutes les surfaces nécessitant un joint et ensuite toutes les intersections de ces derniers avec le corps des pièces pour générer les ouvertures dans lesquelles se glissent les joints. Cette opération est appliquée d’une manière similaire pour les joints des pièces et pour les joints de la couverture.
NESTING & NUMÉROTATION Il reste deux dernières étapes avant de procéder à la fabrication : arranger et nommer. Afin d’optimiser la quantité de matière à travailler, il est important de passer par un logiciel d’optimisation des positions des éléments sur les planches. Cette optimisation mélange toutes les pièces et il est donc nécessaire de nommer les pièces avec des numéros pour pouvoir les retrouver par la suite.
123
Détail Le processus commence par le développement de la forme guide. Elle est développée dans Grasshopper afin d’avoir un contrôle permanent dessus, mais l’objectif est bien sûr de pouvoir y insérer n’importe quelle surface guide pour y appliquer l’algorithme. Ici la forme est générée par un carré (figure1), lui-même subdivisé en une série d’UV point (figure2), directeurs de sa composition. Ces points sont déplacés verticalement (figure3). Plus les points sont loin des coins, plus ils sont hauts, cela résulte une forme complexe voûtée qui consent de tester correctement les différentes facettes d’un tel script. (figure4) Cette surface est ensuite subdivisée en une série de triangles qui définiront la surface finale de l’ensemble (figure5). La forme la taille et les orientations de ces triangles sont les facteurs les plus influents de la morphologie finale. Plus il y a de triangles, plus la topologie de la surface guide est respectée. Mais plus il y a de faces, plus il y a de pièces. Il est par conséquent important de trouver le juste équilibre entre fabrication et esthétique. 124
1
2
3
4
5
1
2
3
4
Dans le but de générer le motif qui définit la position des pièces. Les triangles sont mis à l’échelle dans leurs plans respectifs (figure1). Ces triangles réduits donnent les indications géométriques des lignes directrices en reliant leurs points de milieu de lignes entre eux (figure2). Cela reconnecte toutes les lignes au milieu des segments des grands triangles (en noir). Le système est alors connecté mais pas réciproque. Pour obtenir ce dernier point, il est nécessaire d’introduire une rotation du système. Pour ce faire, il faut simplement relier les points des milieux des triangles — ceux qui connectent les lignes entre elles — et les connecter au milieu des côtés du petit triangle référents à un autre coté (figure3). Le système est par conséquent réciproque — en bleu —. En rallongeant, intersectant et recoupant les lignes on obtient un système complet interconnecté (figure4). Maintenant, il faut assurer au système de fonctionner à l’aide de planche et donc s’assurer que les courbes évoluent dans un plan relativement perpendiculaire à la couverture (figure5).
5
125
Pour ce faire, on relie les deux extrémités des polylignes générées pour former une ligne par laquelle passera le plan de la pièce (figure1). On recherche ensuite les vecteurs normaux à chaque face de la couverture et on les assigne aux extrémités les plus proches. On possède maintenant la direction nécessaire pour extruder à chaque extrémité de pièce, mais si la pièce passe par deux plans, il y a deux vecteurs différents, ce qui va à l’encontre de la contrainte planaire des pièces. On fait simplement la moyenne de ces deux vecteurs et on cherche l’intersection du plan généré sur les lignes de la couverture pour trouver la morphologie finale des lignes du motif (figure2). On dispose maintenant d’une ligne directrice (figure4) reconstituée par les intersections du plan et de la surface guide (figure 3), représentant la partie supérieure des pièces et d’un plan formé par ces mêmes lignes et le vecteur normal. Avant de passer à la suite, le script organise les pièces de manière à placer les numéros proches les uns des autres, ce qui en facilite la lecture et l’assemblage (figure5).
1
2
3
4
5
126
1
2
3
Il est maintenant nécessaire de s’assurer que deux pièces ne partagent pas le même espace. Autrement dit qu’elles se touchent, mais ne soient pas en conflit. Pour réaliser cela, le script comment par mettre en volume les pièces en suivant simplement le plan et le vecteur généré précédemment (figure1&2). Toutes les surfaces potentiellement en contact avec d’autres sont ensuite mises à l’écart et on en cherche les vecteurs normaux qui leur sont respectifs (figure3). Suivant ce vecteur, on extrude quatre lignes, à chaque coin du rectangle, et on évalue à quelle distance ils entrent en contact avec les pièces en contact (figure4). On soustrait ensuite la plus grande distance trouvée par cette opération à la taille des polylignes supérieures (figure5). On obtient donc un ensemble d’éléments 3D optimisé. Il reste encore à développer la jointure (figure5).
4
5
127
Avec le modèle optimisé il est possible déterminer la position de tous les joints. Il faut donc définir les surfaces destinées à contenir les volumes de jointures. Cela se fait de la même manière que définie précédemment à ceci près qu’il faut maintenant différencier les pièces comprenant un ou deux joints. Cela se fait en séparant les pièces internes de celles délimitant les limites de la surface. On les sélectionne en évaluant le contact avec le pourtour de la surface (figure1). Une fois les surfaces concernées correctement sélectionnées (figure2), le script trouve les vecteurs normaux de chacune d’entre elles (figure3) et y place un volume parallélépipédique (figure4). La longueur du volume est définie par la distance trouvée dans le processus d’optimisation de contact auquel on rajoute un facteur de sécurité de quelques millimètres afin de s’assurer que les pièces restent bien en place. Il est alors possible de déterminer par intersection les zones de contact à évider pour créer les ouvertures nécessaires
1
2
3
4
(figure5).
5
128
1
2
3
Comme les pièces seront découpées en 2D, il est important d’assurer le passage des pièces des deux côtés. Pour ce faire, on projette sur le plan de la pièce les deux intersections trouvées (figure1). Le résultat symétrise l’ouverture des mortaises et de assure le bon passage des tenons sans découpes obliques. Avant de l’appliquer au système en 3D, on unifie les deux intersections projetées dans un rectangle en redéfinissant les limites (figure2). On applique ensuite la même procédure pour délimiter la jointure et les intersections de la couverture (figure 3,4&5). C’est à ce moment que l’on définit les tolérances en agissant sur l’échelle des ouvertures — rectangles résultant de la projection des intersections —. La morphologie des pièces est définie, il ne reste plus qu’à travailler la couverture d’une manière plus ou moins similaire et d’organiser l’ensemble pour pouvoir le fabriquer.
4
5
129
Pour finaliser les pièces de la couverture, on leur donne du volume en les extrudant suivant perpendiculairement au plan de leurs surfaces (figure1). Ensuite un algorithme vient évaluer si l’angle entre les pièces est concave ou convexe dans le but d’éviter les collisions dans le cas où deux pièces se croisent en s’extrudant. Le script conserve dans ce cas la valeur nécessaire et l’applique sur la face opposée de la pièce pour assurer que l’ensemble de la couverture est en contact, mais pas en conflit. On applique ensuite la procédure effectuée précédemment pour trouver les ouvertures et appliquer les valeurs de tolérances (figure3 & 4). On obtient par conséquent l’ensemble des pièces dont il suffit de récupérer la section suivant le plan défini au début du script pour obtenir les courbes de découpes (figure5). Ce même plan peut être utilisé pour rabattre toutes les pièces dans le plan XY — le plan horizontal —.
1
2
3
4
5
130
1
Avant de finaliser la production, le script numérote l’ensemble des pièces et produit un plan d’assemblage. La numérotation est simple étant donné que les pièces ont été organisées correctement en début de script. Il ne reste plus qu’à organiser les pièces sur les planches à l’aide d’un logiciel ou plug-in de nesting, de les découper et de les assembler.
2
3
4
5
131
132
6. CONCLUSION — L’OBJET TECHNIQUE DE SIMONDON 133
Pour conclure cette recherche et en faire converger les diverses sujets qui la nourrissent, nous allons employer une référence qui profite d’une résurgence de sa popularité soixante ans après sa publication pour la pertinence de ses propos vis-à-vis de la société contemporaine. Du mode d’existence des objets techniques est une œuvre du philosophe français Gilbert Simondon (1924 – 1989), éditée pour la première fois en 1958, et fait depuis les années 2000 l’objet d’une redécouverte internationale. L’ouvrage avait été mal interprété, jugé techniciste, car ayant fait son entrée dans une société en plein développement d’une forme de technophobie et d’aliénation de la technique. La résurgence actuelle de cet ouvrage supporte plutôt que « Simondon combat simultanément l’antitechnicisme et ce qu’il appelle le “technicisme intempérant” »91 où la machine est adulée comme source de pouvoir. « La culture se conduit envers l’objet technique comme l’homme lorsqu’il se laisse emporter par la xénophobie primitive. La machine est l’étrangère. C’est l’étrangère en laquelle reste enfermé de l’humain, méconnu, matérialisé, asservi, mais restant pourtant de l’humain. La plus forte cause d’aliénation dans notre monde contemporain réside dans cette méconnaissance de la machine, qui n’est pas une aliénation causée par la machine, mais par la nonconnaissance de sa nature. »92 Pour lui, l’aliénation de la machine est donc surtout due à une méconnaissance de cette dernière corollairement à une vision technocratique où son niveau d’automatisation représente son perfectionnement. Si nous parlons de cette aliénation, c’est parce qu’elle est aujourd’hui très présente en architecture, autant du point de vue de la technophobie que du « technicisme intempérant ». D’un côté, la méconnaissance des outils de conception numérique pourrait parfois amener à cantonner l’expression graphique dans des actions automatisées et de l’autre son emploi en faveur de l’éloge d’une architecture numérique ne devrait pas conduire à l’abandon des questions contextuelles. La stigmatisation due à la CAO pourraitelle ainsi être due à un certain manque d’ambition de la part de la profession architecturale à s’investir dans ce genre d’instrument ? Est-il essentiel, comme nous l’avons vu dans le Paramétricisme de Schumacher, d’imposer un nouveau style pour cette architecture technophile, comme s’il était nécessaire de pouvoir justifier toute approche numérique à l’aide d’une production théorique ? Simondon nous propose un entre-deux, de réconcilier ce clivage entre la technique et l’homme et de restaurer à la technique sa part d’humanité. Il approche la question de la technique et de l’évolution, via ce qu’il appelle l’« objet technique ».
134
Simondon aborde une philosophie de la technique, il cherche à « montrer que la culture ignore dans la réalité technique une réalité humaine, et que, pour pouvoir pleinement jouer son rôle, la culture doit incorporer les êtres techniques sous forme de connaissance et de sens des valeurs. »93 Pour lui, la culture donne une valeur de signification aux objets esthétiques et elle se méprend en ne voyant en l’objet technique qu’une valeur d’utilité. On peut retrouver cette approche dans la déresponsabilisation décrite par Crawford1 qui entend que la technologie dans la fabrication a détaché les usagers des objets qui les entourent et qu’il faut reconquérir cet objet technique par la compréhension au moins superficielle de son fonctionnement et de sa production. La connaissance de l’objet technique lui confère par conséquent une potentielle valeur culturelle. Cela accorde aussi la restitution de la part d’humain présente dans l’évolution technique. L’humain est par conséquent indissociable de la technique, car d’une part il est responsable de son évolution et inversement son évolution est profondément liée à celle de ses besoins. Cependant, il nous met en garde sur la confusion entre l’automatisme de la machine et son humanisation, car il existe une vision technocrate de la machine comme androïde, dotant la machine d’une volonté propre par une automatisation absolue. Or, cette vision est un mythe et il soutient même que l’automatisation se fait au prix de la diversité. L’automatisation a pour but de n’en avoir qu’un seul, mais de le faire au mieux, ce qu’il qualifie de « degré assez bas de perfection technique ». La machine automatique s’enferme en réalité sur elle-même et c’est son absence d’indétermination qui la rend d’une certaine manière simple. L’objet technique évolué sera plutôt un être sensible aux éléments qui l’entourent. « La machine qui est dotée d’une haute technicité est une machine ouverte, et l’ensemble des machines ouvertes suppose l’homme comme organisateur permanent, comme un interprète vivant des machines les unes par rapport aux autres. Loin d’être le surveillant d’une troupe d’esclaves, l’homme est l’organisateur permanent d’une société d’objet qui ont besoin de lui comme les musiciens ont besoin du chef d’orchestre. »94 L’objet technique évolué est donc capable de former un système, des « ensembles cohérents », dans lesquels les objets techniques sont aptes à communiquer entre eux. C’est là où l’architecture algorithmique et la fabrication numérique s’inscrivent dans la pensée simondienne étant donné qu’ils ont pour fondement un réseau d’information. Les programmes et les machines constituent alors un ensemble cohérent susceptible d’agir de concert et de produire un organisme technique évolué. L’outil paramétrique étant basé sur l’information pure, il favorise un échange d’information grâce à un langage, lui, standardisé. Bruce Mau soutient que l’émancipation 1 Voir chapitre sur l’éloge du carburateur
135
créative peut se faire au travers de la production de ses propres outils1, c’est peut-être en ce sens que le dessin algorithmique trouve sa part d’humanité. Dans ce cas c’est en fait l’automatisation de l’outil digital qui est la source d’une production architecturale aliénée, sans humanité. À l’inverse, là où l’algorithme rencontre le robot peut se former un ensemble cohérent, le robot actuel correspondant bien à la définition d’un objet technique évolué, car répondant parfaitement au principe de la machine ouverte, complètement à la merci des ambitions de son manipulateur. C’est de ce fait l’usage qui établit la part d’être vivant perceptible parmi une fabrication robotisée. De plus, le robot est fait pour être raccordé à presque n’importe quel système technique, car son langage de communication est adapté pour être le plus compatible possible. C’est en fonction du niveau d’avancement du système technique dans lequel il est implanté que le robot devient ou non un objet technique évolué. Nous avons vu qu’aujourd’hui, le robot en tant qu’objet technique évolué est capable de se déplacer directement sur un chantier, d’analyser et de comprendre un terrain pour y adapter une série d’interventions, cela ne demeure cependant pas moins qu’une chaîne de réactions par un algorithme. L’humain reste le coordinateur de cette chaîne tout comme dans une usine immobile, délocaliser une usine sur un chantier ne la transforme pas en maçon mais transforme peut-être la façon dont le maçon opère. La robotisation de l’activité humaine se produit plutôt lorsque l’homme effectue une opération pour laquelle il n’est pas spécifiquement prédisposé. La machine supplantera toujours l’homme dans un rapport de force physique et l’ordinateur dans la tâche de calculer. La machine ne prend donc la place de l’homme que lorsque l’homme effectue lui-même un travail de machine. « Ce n’est pas le travail à la chaine qui induit la standardisation, mais la standardisation intrinsèque qui permet au travail à la chaine d’exister »95 Le robot est par conséquent tout autant capable de faire partie d’un système simple, comme une chaine de montage, que d’un système complexe et sensible — comme le projet infinity wall2 de Grammazio & Köhler où le robot monte un mur de brique en suivant une ligne tracée manuellement au sol —. C’est en fait le rejet de l’automation qui fait progresser le robot en tant qu’objet technique et de retranscrire la part d’être vivant qui a alimenté l’établissement de son action. Pour Simondon, ces objets techniques sont dans une évolution continue, ils sont définis par ce qu’il appelle leur genèse, une série de transformations dont la source est un objet technique abstrait, c’est à dire où tous les éléments agissent de manière autonome, indépendamment les uns des autres. Par opposition à un objet technique concret où tous les éléments sont interdépendants, il n’y 1 Voir le chapitre sur Grasshopper 2 Voir le chapitre Une micro-usine sur chantier
136
a pratiquement aucune perte de communication car chaque réaction est la source d’une autre. Par exemple, la chaleur qui se dégage d’un moteur peut être récupérée pour d’autres fins plutôt que simplement expulsée ou contrecarrée. Pour alimenter sa théorie, Simondon la technologie avec précision, il nous démontre par exemple que le moteur actuel n’est pas la simple suite chronologique du moteur du siècle passé, mais qu’il est le résultat d’un processus graduel d’intégration de structures. Le moteur d’antan était par exemple capable de supporter des chaleurs bien plus intenses et de résister plus longtemps, ces moteurs ont d’ailleurs aujourd’hui toujours été transplantés sur des bateaux. Cela est dû au fait que dans le moteur actuel, l’ensemble des pièces forment un ensemble soudé qui agit de concert, dans un système de « causalités réciproques » tandis que dans l’autre cas, les éléments procèdent de manière détachée, les uns après les autres. Cela rend ce système plus résilient, mais moins performant. Le passage d’un objet abstrait en objet technique se fait d’après Simondon par « concrétisations » consécutives, c’est-àdire que les structures qui lui sont rattachées vont se voir intégrées à l’objet technique afin de lui apporter un nouveau niveau de concrétisation. Cette concrétisation successive se fait par l’adaptation de l’objet technique à l’usage ou à des milieux particuliers. Elle représente en fait un usage dans la temporalité d’une technologie. L’objet technique s’adapte en intégrant de nouvelles capacités à son système, lesquelles sont dans un premier temps étrangères au corps de l’objet technique. D’ailleurs pour Simondon, « La spécialisation ne se fait pas fonction par fonction, mais synergie par synergie »96 et de ce fait la concrétisation n’a vraiment lieu que lorsqu’une nouvelle structure rejoint l’objet technique pour former un nouvel ensemble de causalité. C’est comme cela qu’il définit la notion de progrès, où une concrétisation est un perfectionnement mineur si elle ne sert qu’à résoudre une complication, mais un perfectionnement majeur si ce sont plutôt deux ensembles qui fusionnent pour former un nouveau système de « causalités réciproques ». Ce qu’il explique est particulièrement approprié pour expliquer le développement des nexorades contemporaines. Elles forment une famille technique qui ne cesse de se concrétiser via toutes une autre série d’innovations. Elles forment un support extrêmement flexible pour la convergence technique et nous avons vu que la recherche l’emploie abondamment. Spécifiquement relativement à l’architecture algorithmique, qui, de par la standardisation de son langage peut relier des synergies et les matérialiser dans l’utilisation d’algorithmes. Les algorithmes ont en fait pour but de traduire l’information, de concéder à la structure réciproque de devenir un objet technique développé et sensibilisé à son environnement par l’induction de stimuli. C’est aussi le cas dans les modèles paramétriques, destinés à fournir une réponse sous forme de nexorades à un ensemble de 137
données comme l’espace à couvrir, le motif à représenter ou encore la morphologie désirée des éléments. De même c’est par l’algorithme que la nexorade parvient se concrétiser par l’intégration de la jointure. Nous l’avons observé avec des projets tels que la Wikihouse ou les pavillons ICD/ITKE, l’intégration de la connexion ou du comportement d’un matériau à la morphologie de l’élément par l’utilisation de la fabrication numérique aide à élaborer un processus de production en synergie avec son processus de conception. On y retrouve la notion décrite par Simondon, un système évolué d’objets techniques se démarque par son aptitude à échanger de l’information. L’architecture algorithmique peut en réalité constituer un ensemble performant, capable à la fois de réagir à des informations et d’agir sur le monde qui l’entoure. Dans ces circonstances, les nexorades représentent un excellent terrain de jeu pour l’expérimentation d’une telle approche. Selon la vision du progrès de Simondon, il serait possible d’imaginer que le développement des nexorades et de l’architecture algorithme va tendre vers la formation d’ensembles de plus en plus autonomes, vraisemblablement par l’utilisation du robot. Pour conclure, nous dirons qu’il existe un énorme potentiel dans l’exploration de l’architecture algorithmique, particulièrement dans cette opportunité d’intégration. Ce n’est pas uniquement l’aspect paramétrable, mais la possibilité d’élargir le champ des éléments capables d’agir sur l’architecture en elle-même. Cela est valable pour beaucoup d’objets techniques, mais nous avons ici étudié son développement vis-à-vis des structures réciproques. Et comment une telle technique peut évoluer parmi un réseau d’influences ayant comme vecteur commun la conception algorithmique. Simondon, nous invite à ne pas nous tenir à la simple optimisation de problèmes techniques, mais à chercher à faire fusionner des contextes radicalement différents, tout comme Carpo qui nous rappelle que certaines choses ont besoin de rester standardisées, d’autres n’appellent qu’à voir leur nature évoluer. C’est ce phénomène que l’ont retrouve dans l’exploration des structures réciproques, où un moyen de fabrication standard est utilisé au profit d’une innovation convergente.
« L’objet technique concret, c’est-à-dire évolué, se rapproche du mode d’existence des objets naturels, il tend vers la cohérence interne, vers la fermeture de son enceinte, et de plus il incorpore une partie du monde naturel qui intervient comme condition de fonctionnement, et fait ainsi partie du système des causes et des effets. »97
138
139
140
A B C
7. BIBLIOGRAPHIE ET ICONOGRAPHIE 141
a. Références employées 1 Yilmaz M. Fatih, La conception en architecture: du traditionnelle au paramétrique: une approche computationnelle nouvelle, 2015 2 Kajetan Szostok author et Szostok, K., L’influence des logiciels paramétriques sur le processus de la conception en architecture, 2012 3 Larousse, É., « Définitions : algorithme - Dictionnaire de français Larousse », s.d., [En ligne]. <https://www.larousse.fr/dictionnaires/ francais/algorithme/2238>. (Consulté le 10 avril 2019). 4 « Antoni Gaudí », Wikipédia, 25 mai 2019, [En ligne]. <https://fr.wikipedia.org/w/index.php?title=Antoni_ Gaud%C3%AD&oldid=159560118>. (Consulté le 2 juillet 2019). 5 « Frei Otto », Wikipedia, 9 janvier 2019, [En ligne]. <https://en.wikipedia.org/w/index.php?title=Frei_Otto&oldid=877591560>. (Consulté le 3 juillet 2019). 6 Georg Vrachliotis editor et al., Frei Otto: thinking by modeling, Leipzig, Spector Books, 2017. 7 Burry, M., « Antoni Gaudí and Frei Otto: Essential Precursors to the Parametricism Manifesto », Architectural Design, vol. 86, n° 2, 2016, pp. 30‑35. 8 « Patrik Schumacher », Wikipedia, 4 février 2019, [En ligne]. <https://en.wikipedia.org/w/index.php?title=Patrik_ Schumacher&oldid=881806618>. (Consulté le 3 juillet 2019). 9 Schumacher, P., « Parametricism as Style - Parametricist Manifesto », s.d., p. 3. 10 Ibid. 11 Gage, M.F., « A Hospice for Parametricism », Architectural Design, mars 2016, [En ligne]. <http://onlinelibrary.wiley.com/doi/ abs/10.1002/ad.2034>. (Consulté le 3 juillet 2019). 12 Burry, M., « Antoni Gaudí and Frei Otto: Essential Precursors to the Parametricism Manifesto », Architectural Design, vol. 86, n° 2, 2016, pp. 30‑35. 13 Ibid. 14 B. Cache, Projectiles, London, Architectural Association, 2011 (Architecture words 6). 15 Kajetan Szostok author et Szostok, K., L’influence des logiciels paramétriques sur le processus de la conception en architecture, 2012. 16 « Grasshopper et la programmation sur Rhinoceros 4DNArchi », s.d., [En ligne]. <http://dnarchi.fr/pedagogies/Grasshopper-et-laprogrammation-sur-rhinoceros-4-une-introduction/>. (Consulté le 7 août 2019]. 17« Grasshopper 3D - Wikipedia », s.d., [En ligne]. <https://en.wikipedia.org/wiki/Grasshopper_3D>. (Consulté le 14 mai 2019). 18 Tedeschi, A., Parametric architecture: with Grasshopper® : primer, Brienza (Potenza), Italy, Le Penseur, 2011. 19 Mau, B., « An Incomplete Manifesto for Growth », I D, vol. 46, n° 2, 1999, pp. 56‑59. 20 Gramazio, F. et Kohler, M., The robotic touch: how robots change architecture, Zurich, Park Books, 2014. 21 Bickel, B. et al., « State of the Art on Stylized Fabrication: State of the Art on Stylized Fabrication », Computer Graphics Forum, vol. 37, n° 6, septembre 2018, pp. 325‑342. 22 Gramazio, F. et Kohler, M., The robotic touch: how robots change architecture, Zurich, Park Books, 2014. 23 Iwamoto, L., Digital fabrications: architectural and material techniques, New York, Princeton Architectural Press, 2009 (Architecture briefs),P.44. 24 Ibid. 25 Achim Menges, Tobias Schwinn et Oliver David Krieg, Advancing wood architecture: a computational approach, London ; New York, Routledge, 2017. 26 Ibid. 27 Ibid. 28 Ibid. 29 Wikipédia, 26 décembre 2018, [En ligne]. <https://fr.wikipedia.org/w/index.php?title=Open_source&oldid=155121176>. (Consulté le 11 juillet 2019). 30 Parvin, A., L’architecture pour les gens par les gens, s.d., [En ligne]. <https://www.ted.com/talks/alastair_parvin_architecture_for_the_ (Consulté le 10 juillet 2019).
people_by_the_people?language=fr>.
31 Ibid.
142
32 Ibid. 33 Goodwins, R., « Home in a Day », Popular Science; New York, janvier 2014, pp. 60‑63. 34 Crawford, M.B., Eloge du carburateur: essai sur le sens et la valeur du travail, Paris, La Découverte, 2010,P.10. 35 Ibid.,P.56. 36 Ibid.,P.49. 37 BERNARD P., «Le Chantier», Criticat02, Criticat, septembre 2008, p.102. 38 Gramazio, F. et Kohler, M., The robotic touch: how robots change architecture, Zurich, Park Books, 2014. 39 Ibid. 40 D.P. Atkinson et al., « Post Industrial Manufacturing Systems »:, s.d., p. 19. 41 « Michael Hansmeyer - Subdivided Columns », s.d., [En ligne]. <http://www.michael-hansmeyer.com/subdivided-columns>. (Consulté le 7 août 2019]. 42 Cache, B., Projectiles, London, Architectural Association, 2011 (Architecture words 6),p. 20. 43 Ibid. 44 M. Carpo, The second digital turn: design beyond intelligence, Cambridge, Massachusetts, The MIT Press, 2017 (Writing architecture). 45 Ibid. 46Larsen, O. P. Reciprocal frame architecture. (Elsevier, 2008). 47 Ibid. 48 G.T. Houlsby, « John Wallis and the Numerical Analysis of Structures », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 207‑217. 49 Ibid. 50 « Friedrich Zollinger », Wikipedia, 23 décembre 2018, [En ligne]. <https://en.wikipedia.org/w/index.php?title=Friedrich_ Zollinger&oldid=875000205>. (Consulté le 18 avril 2019). 51 Tamke, M. et al., « Lamella Flock », dans, 1 janvier 2010, pp. 37‑48. 52 Melvin, J., « Serpentine Gallery Pavilion 2005 », Architectural Design, vol. 75, n° 6, 2005, pp. 102‑106. 53 Ibid. 54 Computational design modelling: proceedings of the Design Modelling Symposium Berlin 2011, Berlin ; New York, Springer, 2011. 55 « Metropol Parasol », Wikipedia, 8 novembre 2018, [En ligne]. <https://en.wikipedia.org/w/index.php?title=Metropol_ Parasol&oldid=867838422>. (Consulté le 18 avril 2019). 56 Larsen, O.P., « Reciprocal Frame Architecture in Japan », 2009, p. 11. 57 Ibid. 58 Kazuma Goto, Ryota Kidokoro et Takeshi Matsuo, « Rokko Mountain Observatory », 2011. 59 Roelofs, R., « Leonardo da Vinci’s Bar Grids », s.d. 60 Gherardini, F. et Leali, F., « Reciprocal Frames in Temporary Structures: An Aesthetical and Parametric Investigation », Nexus Network Journal, vol. 19, n° 3, décembre 2017, pp. 741‑762. 61 O.P. Larsen, « Reciprocal Frame (RF) Structures: Real and Exploratory », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 119‑134. 62 Mesnil, R. et al., « Form finding and design of a timber shell-nexorade hybrid », 2018. 63 Ibid. 64 « Gridshell », Wikipedia, 2 avril 2019, [En ligne]. <https://en.wikipedia.org/w/index.php?title=Gridshell&oldid=890681607>. (Consulté le 16 mai 2019). 65 Mesnil, R. et al., « Form finding and design of a timber shell-nexorade hybrid », 2018. 66 O. Baverel et al., « Nexorades », International Journal of Space Structures, vol. 15, juin 2000, pp. 155‑159 67 Ibid. 68 Gherardini, F. et Leali, F., « Reciprocal Frames in Temporary Structures: An Aesthetical and Parametric Investigation », Nexus Network Journal, vol. 19, n° 3, décembre 2017, pp. 741‑762. 69 Ibid.
143
70 M. A. Hann et M.A. Hann, Structure and form in design: critical ideas for creative practice, London ; New York, Berg, 2012. 71 P. Song et al., « Reciprocal frame structures made easy », ACM Transactions on Graphics, vol. 32, n° 4, juillet 2013, p. 1 72 Ibid. 73 N. Rappaport, « A Deeper Structural Theory », Architectural Design, vol. 80, n° 4, 2010, pp. 122‑129. 74 Ibid., p.129. 75 F. Gherardini et F. Leali, « Reciprocal Frames in Temporary Structures: An Aesthetical and Parametric Investigation », Nexus Network Journal, vol. 19, n° 3, décembre 2017, pp. 741‑762. 76 O. Baverel et O.P. Larsen, « A Review of Woven Structures with Focus on Reciprocal Systems », International Journal of Space Structures, octobre 2012, pp. 281‑288. 77 O. Baverel et A. Pugnale, « Reciprocal systems based on planar elements », dans P. Cruz (éd.), Structures and Architecture, s.l., CRC Press, 27 juin 2013, pp. 456‑463, [En ligne]. <http://www.crcnetbase.com/doi/abs/10.1201/b15267-63>. (Consulté le 13 mars 2019]. 78 Ibid. 79 J. Gustaffson, Connections in Timber Reciprocal Frames, Charlmers University of technology, 2016, [En ligne]. <http://publications.lib. chalmers.se/records/fulltext/243237/243237.pdf>. (Consulté le 13 mars 2019]. 80 Achim Menges, Tobias Schwinn et Oliver David Krieg, Advancing wood architecture: a computational approach, London ; New York, Routledge, 2017. P.190. 81 C. Robeller, P. Mayencourt et Y. Weinand, « CNC-Fabricated, integrated mechanical attachment for structural wood panels », 2014, p. 10. 82 « 50 Digital Wood Joints by Jochen Gros – WINTERDIENST », s.d., [En ligne]. <http://winterdienst.info/50-digital-wood-joints-byjochen-gros/>. (Consulté le 23 juillet 2019]. 83 S.-J.A. Liotta, « Experimenting the Use of Wood in Contemporary Architecture: Integrating Research into Practice », dans F. Bianconi M. Filippucci (éds.), Digital Wood Design, vol. 24, Cham, Springer International Publishing, 2019, pp. 1317‑1354, [En ligne]. <http://link. springer.com/10.1007/978-3-030-03676-8_53>. (Consulté le 23 juillet 2019]. et
84 N. Mellado et al., « Computational Design and Construction of Notch-Free Reciprocal Frame Structures », dans P. Block et al. (éds.), Advances in Architectural Geometry 2014, Cham, Springer International Publishing, 2015, pp. 181‑197, [En ligne]. <http://link.springer. com/10.1007/978-3-319-11418-7_12>. (Consulté le 26 février 2019]. 85 S. Brancart et al., « Bending-active reciprocal structures based on equilateral polyhedral geometries », 2017, p. 11. 86 R. Mesnil et al., « Form finding of nexorades using the translations method », Automation in Construction, vol. 95, novembre 2018, pp. 142‑154. 87 C. Douthe et al., « Design and construction of a shell-nexorade hybrid timber structure », 2018, p. 9. 88 Ibid. 89 Y. Anastas, L. Rhode-Barbarigos et S. Adriaenssens, « Design-to-Construction Workflow for Cell-Based Pattern Reciprocal Free-Form Structures », Journal of the International Association for Shell and Spatial Structures, vol. 57, n° 2, juin 2016, pp. 159‑176. 90 C. Douthe et O. Baverel, « Design of nexorades or reciprocal frame systems with the dynamic relaxation method », Computers & Structures, vol. 87, n° 21‑22, novembre 2009, pp. 1296‑1307. 91 J.-H. Barthélémy, « Simondon et la question des âges de la technique », Appareil, juin 2008, [En ligne]. <http://journals.openedition.org/ (Consulté le 16 juillet 2019].
appareil/450>.
92 G. Simondon, Du mode d’existence des objets techniques, Paris, Aubier-Montaigne, 1969 (Analyse et raisons 1), p. 9. 93 Ibid., p. 9. 94 Ibid., p. 11 95 Ibid., p. 37 96 Ibid., p. 20 97 Ibid., p. 46
144
145
b. Références Iconographiques employées 1 « A Parametric Devotion: Patrik Schumacher Discusses “Architecture and Freedom” at the Royal Academy », ArchDaily, 7 novembre 2015, [En ligne]. <http://www.archdaily.com/776682/a-parametric-devotion-patrik-schumacher-discusses-architecture-and-freedom-at-the-royalacademy>. (Consulté le 7 août 2019]. 2 « Algorithme », Wikipédia, 4 avril 2019, [En ligne]. <https://fr.wikipedia.org/w/index.php?title=Algorithme&oldid=158145993>. (Consulté 10 avril 2019).
le
3« Antoni Gaudí », Wikipédia, 25 mai 2019, [En ligne]. <https://fr.wikipedia.org/w/index.php?title=Antoni_ Gaud%C3%AD&oldid=159560118>. (Consulté le 2 juillet 2019). 4 I. Liddell, « Frei Otto and the development of gridshells », Case Studies in Structural Engineering, vol. 4, décembre 2015, pp. 39‑49. 5 « Frei Otto », s.d., [En ligne]. <http://www.freiotto.com/Boegen.html#>. (Consulté le 3 juillet 2019). 6 « Sleeping Beauty: Reinventing Frei Otto’s Multihalle », Detail-online.com, s.d., [En ligne]. <https://www.detail-online.com/article/ sleeping-beauty-reinventing-frei-ottos-multihalle-32256/>. (Consulté le 8 août 2019]. 7 L. Iwamoto, Digital fabrications: architectural and material techniques, New York, Princeton Architectural Press, 2009 (Architecture briefs).
8 Ibid. 9 Ibid. 10 Tessellation Escher 22974 | ENEWS, s.d., [En ligne]. <http://www.enews.tech/tessellation-escher.html>. (Consulté le 7 août 2019]. 11 « tnl-wall-mc-escher-birds-tessellations-885378.jpg (1024×538) », s.d., [En ligne]. <https://2.bp.blogspot.com/-yBM6DWy3gZU/ Vs6eR8M9Y7I/AAAAAAAAAkQ/vNeMSkwUn8g/w1200-h630-p-k-no-nu/tnl-wall-mc-escher-birds-tessellations-885378.jpg>. (Consulté le 7 août 2019]. 12 L. Iwamoto, Digital fabrications: architectural and material techniques, New York, Princeton Architectural Press, 2009 (Architecture briefs). 13 Ibid. 14 Ibid. 15 Ibid. 16 Kolb, J., Bois: systèmes constructifs, Lausanne, [Suisse], Presses polytechniques et universitaires romandes, 2011. 17 Ibid.. 18 « ICD/ITKE Research Pavilion 2011 | Institute for Computational Design and Construction », s.d., [En ligne]. <https://icd.uni-stuttgart. de/?p=6553>. (Consulté le 7 août 2019]. 19 Ibid. 20 Ibid. 21 Ibid. 22 Ibid. 23 Ibid. 24 Ibid. 25 « Free: Download a Construction Kit to Build Your Own “Wikihouse” - Architizer Journal », Journal, 19 février 2019, [En ligne]. <https://architizer.com/blog/practice/materials/Wikihouse-the-open-source-diy-home/>. (Consulté le 8 août 2019]. 26 Ibid. 27 « Wikihouse-assembly-steps.jpg (1232×952) », s.d., [En ligne]. <http://i.bnet.com/blogs/Wikihouse-assembly-steps.jpg>. (Consulté le 8 août 2019]. 28 « Wikihouse – Page 4 – First Wiki Farmhouse », s.d., [En ligne]. <https://awikifarmhouse.wordpress.com/category/Wikihouse/page/4/#jpcarousel-141>. (Consulté le 9 août 2019]. 29 « Wiki House - Picture gallery », Archilovers, s.d., [En ligne]. <https://www.archilovers.com/projects/136762/gallery?1094015/ projects/136762/gallery?1094015>. (Consulté le 9 août 2019]. 30 « MOMENTUM – structural engineers - Wikihouse », MOMENTUM – structural engineers -, s.d., [En ligne]. <http://www. (Consulté le 9 août 2019].
momentumengineering.com/projects/residential/Wikihouse/>.
146
31 « Wikihouse – Page 4 – First Wiki Farmhouse », s.d., [En ligne]. <https://awikifarmhouse.wordpress.com/category/Wikihouse/page/4/#jpcarousel-141>. (Consulté le 9 août 2019]. 32 « Wiki House - Picture gallery », Archilovers, s.d., [En ligne]. <https://www.archilovers.com/projects/136762/gallery?1094015/ projects/136762/gallery?1094015>. (Consulté le 9 août 2019]. 33 « Wikihouse: edilizia open-source », s.d., [En ligne]. <https://www.domusweb.it/it/architettura/2012/06/19/Wikihouse-edilizia-open-source. (Consulté le 9 août 2019].
html>.
34 Ibid. 35 « Wikihouse », s.d., [En ligne]. <https://urbannext.net/Wikihouse/>. (Consulté le 9 août 2019]. 36 « Wikihouse », s.d., [En ligne]. <https://www.Wikihouse.cc>. (Consulté le 9 août 2019]. 37 « Gramazio Kohler Research », s.d., [En ligne]. <http://gramaziokohler.arch.ethz.ch/web/e/forschung/216.html>. (Consulté le 7 août 2019]. 38 D.P. Atkinson et al., « Post Industrial Manufacturing Systems »:, s.d., p. 19. 39 « Michael Hansmeyer - Subdivided Columns », s.d., [En ligne]. <http://www.michael-hansmeyer.com/subdivided-columns>. (Consulté le 7 août 2019]. 40 « Centre Frans Masereel Groupe Van Roey », s.d., [En ligne]. <https://www.groepvanroey.be/nl/referentieprojecten/frans-masereelcentrum>. (Consulté le 29 juillet 2019].. 41 Mc Lean, « In the Frame », 2011. 42 « rainier-tipi-interior.jpg (341×800) », s.d., [En ligne]. <https://rainieroutdoor.com/media/wysiwyg/infortis/ultimo/blog/outdoor/the_ tipi_a%20tradition/rainier-tipi-interior.jpg>. (Consulté le 11 août 2019]. 43 « Hogan interior at Navajo Indian Village in Page AZ », Road Trippin’ with Bob, 19 décembre 2014, [En ligne]. <https://roadtrippinwithbob. wordpress.com/2014/12/19/hogan-interior-at-navajo-indian-village-in-page-az/>. (Consulté le 11 août 2019]. 44Larsen, O. P. Reciprocal frame architecture. (Elsevier, 2008). 45Ibid. 46Ibid. 47Ibid. 48 G.T. Houlsby, « John Wallis and the Numerical Analysis of Structures », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 207‑217. 49 Tamke, M. et al., « Lamella Flock », dans, 1 janvier 2010, pp. 37‑48. 50 Ibid. 51 https://architizer.com/projects/serpentine-gallery-pavilion-by-alvaro-siza-and-eduardo-souto-de-moura/ 52 https://www.dezeen.com/2015/11/29/video-interview-alvaro-siza-eduardo-souto-de-moura-2005-serpentine-gallery-pavilion-julia-peytonjones-movie/.
53 Ibid. 54 Ibid. 55 Ibid. 56 Computational design modelling: proceedings of the Design Modelling Symposium Berlin 2011, Berlin ; New York, Springer, 2011. 57 Ibid. 58 Ibid. 59 Ibid. 60 Ibid. 61 Ibid. 62«Seiwa bunraku puppet theater 2.jpg », Wikipedia, 17 septembre 2007, [En ligne]. <https://ja.wikipedia.org/w/index. php?title=%E3%83%95%E3%82%A1%E3%82%A4%E3%83%AB:Seiwa_bunraku_puppet_theater_2.jpg&oldid=14911048>. (Consulté le 5 août 2019]. 63 A. Pugnale et M. Sassone, « Structural Reciprocity: Critical Overview and Promising Research/Design Issues », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 9‑35. 64 O.P. Larsen, « Reciprocal Frame Architecture in Japan », 2009.
147
65 Ibid. 66 Ibid. 67 « MUST VISIT PLACESRokkosan.com », s.d., [En ligne]. <https://www.rokkosan.com/en/modelcourse/summer/>. (Consulté le 5 août 2019]. 68 O.P. Larsen, « Reciprocal Frame Architecture in Japan », 2009. 69 Ibid.. 70 L. Ocvenety, « kobe trip : rokko shidare observatory », y t n e v c o, 17 juin 2017, [En ligne]. <https://liniocvenety.wordpress. com/2017/06/17/kobe-trip-rokko-shidare-observatory/>. (Consulté le 9 août 2019].] 71 « Rinus Roelofs - Index », s.d., [En ligne]. <http://www.rinusroelofs.nl/>. (Consulté le 5 août 2019]. 72 Ibid. 73 F. Gherardini et F. Leali, « Reciprocal Frames in Temporary Structures: An Aesthetical and Parametric Investigation », Nexus Network Journal, vol. 19, n° 3, décembre 2017, pp. 741‑762. 74 Ibid. 75 « Gallery of KREOD / Chun Qing Li of Pavilion Architecture - 20 », ArchDaily, s.d., [En ligne]. <https://www.archdaily.com/275460/ kroed-chun-qing-li-of-pavilion-architecture/kreod_pavilions_0012>. (Consulté le 5 août 2019]. 76 Ibid. 77 O.P. Larsen, « Reciprocal Frame (RF) Structures: Real and Exploratory », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 119‑134. 78 S. Brancart et al., « UNDULATUS: design and fabrication of a self-interlocking modular shell structure based on curved-line folding », dans, 20 août 2015. 79 Ibid. 80 Ibid. https://www.vub.be/ARCH/images/news/6KB5RG_IMG_7774-brightness_copy.jpg.
82 R. Mesnil et al., « Form finding and design of a timber shell-nexorade hybrid », 2018. 83 Ibid. 84 Ibid. 85 Ibid. 86 Levage d’une structure Gridshell Ekilaya, s.d., [En ligne]. <https://vimeo.com/300510035>. (Consulté le 18 juillet 2019]. 87 Mesnil, R. et al., « Form finding and design of a timber shell-nexorade hybrid », 2018. 88 Ibid. 89 M. A. Hann et M.A. Hann, Structure and form in design: critical ideas for creative practice, London ; New York, Berg, 2012.pp. 53. 90 Ibid.,pp. 54. 91 Ibid.,pp. 55-56. 92 Ibid.,pp. 57. 93 P. Song et al., « Reciprocal frame structures made easy », ACM Transactions on Graphics, vol. 32, n° 4, juillet 2013.. 94 Ibid. 95 Ibid. 96 Ibid. 97 Ibid. 98 « Centre Frans Masereel Groupe Van Roey », s.d., [En ligne]. <https://www.groepvanroey.be/nl/referentieprojecten/frans-masereelcentrum>. (Consulté le 29 juillet 2019].. 99 « What are the key features of gestalt theory? - Quora », s.d., [En ligne]. <https://www.quora.com/What-are-the-key-features-of-gestalt(Consulté le 7 août 2019].
theory>.
100 O. Baverel et O.P. Larsen, « A Review of Woven Structures with Focus on Reciprocal Systems », International Journal of Space Structures, octobre 2012, pp. 281‑288. 101 Ibid. 102 Ibid.
148
103 Ibid. 104 Ibid. 105 Ibid. 106 O. Baverel et O.P. Larsen, « A Review of Woven Structures with Focus on Reciprocal Systems », International Journal of Space Structures, octobre 2012, pp. 281‑288. 107 J. Gustaffson, Connections in Timber Reciprocal Frames, Charlmers University of technology, 2016, [En ligne]. <http://publications.lib. (Consulté le 13 mars 2019].
chalmers.se/records/fulltext/243237/243237.pdf>.
108 Ibid. 109 Ibid. 110 Ibid. 111 Ibid. 112 Ibid. 113 Ibid. 114 Ibid. 115 Ibid. 116 Ibid. 117 Connecteur d’échaffaudages, s.d., [En ligne]. <httpswww.pexels.comphotometal-scaffolding-scaffolds-steel-985206>. 118 Etrier, s.d., [En ligne]. <https://www.larenovation.ca/materiaux/etriers-solives-bois.html>. . 119 Tourillons de 40 mm en bois de hêtre WOLFCRAFT, s.d., [En ligne]. <https://www.mr-bricolage.be/cheville/20432-tourillons-de-40-mmen-bois-de-hetre-wolfcraft.html>. (Consulté le 6 août 2019]. 120 J. Gustaffson, Connections in Timber Reciprocal Frames, Charlmers University of technology, 2016, [En ligne]. <http://publications.lib. (Consulté le 13 mars 2019].
chalmers.se/records/fulltext/243237/243237.pdf>.
121 Bulldog Timber Connectors (BS6011) -Harris & Bailey Ltd, s.d., [En ligne]. <https://www.harrisandbailey.com/shop/details/BS6011>. (Consulté le 22 juillet 2019]. 122 Connecteur de lambourde + vis, s.d., [En ligne]. <https://www.deck-linea.com/lambourde-bois-et-aluminium/65-vis-de-fixation.html>. .. . 123 Scellement chimique : fixer une tige filetée dans un mur, 24 novembre 2016, [En ligne]. <https://www.vis-express.fr/blog/comment-reussir(Consulté le 22 juillet 2019].
un-scellement-chimique-fixer-une-tige-filetee-dans-un-mur/>.
124 J. Gustaffson, Connections in Timber Reciprocal Frames, Charlmers University of technology, 2016, [En ligne]. <http://publications.lib. chalmers.se/records/fulltext/243237/243237.pdf>. (Consulté le 13 mars 2019]. 125 Ibid 126 « Mortise and Tenon Joint », Identifying Antique Joinery, 21 avril 2012, [En ligne]. <https://antiquejoinery.wordpress.com/mortise-andtenon-joint/>. (Consulté le 6 août 2019]. 127 50digital joints, s.d., [En ligne]. <https://cdn.instructables.com/ORIG/FW1/4AF2/I2VLGSNJ/FW14AF2I2VLGSNJ.pdf>. (Consulté le 23 juillet 2019]. 128 J. R. Mesnil et al., « Form finding of nexorades using the translations method », Automation in Construction, vol. 95, novembre 2018, pp. 142‑154. 129 Y. Anastas, L. Rhode-Barbarigos et S. Adriaenssens, « Design-to-Construction Workflow for Cell-Based Pattern Reciprocal Free-Form Structures », Journal of the International Association for Shell and Spatial Structures, vol. 57, n° 2, juin 2016, pp. 159‑176.
149
c. Bibliographie Aau Anastas, « Structures réciproques temporaires », 2014, [En ligne]. <http://aauanastas.com/temporary-reciprocal-structures-3/>. . Achim Menges, Tobias Schwinn et Oliver David Krieg, Advancing wood architecture: a computational approach, London ; New York, Routledge, 2017. Adelmann, G., Le bois prend de l’ampleur: trouvera-t-il une place dans la construction d’immeubles moyens et hauts à Bruxelles ?, 2013. Aiello, C., Digital & parametric architecture, Los Angeles, CA ; New York, NY, EVolo, 2014 (Evolo 6). Anastas, Y., Rhode-Barbarigos, L. et Adriaenssens, S., « Design-to-Construction Workflow for Cell-Based Pattern Reciprocal Free-Form Structures », Journal of the International Association for Shell and Spatial Structures, vol. 57, n° 2, juin 2016, pp. 159‑176. Apolinarska, A.A., Complex Timber Structures from Simple Elements: Computational Design of Novel Bar Structures for Robotic Fabrication Assembly, ETH Zurich, 2018, [En ligne]. <http://hdl.handle.net/20.500.11850/266723>. (Consulté le 15 mars 2019).
and
Ascencio, C., Architecture, numérique et bio-inspiration: réflexions sur un (nouveau) rapport entre nature et architecture, 2016. Atkinson, D.P. et al., « Post Industrial Manufacturing Systems »:, 2008, p. 19. Atkinson, P. et al., Future factories: design work by Lionel Theodore Dean, Huddersfield, University of Huddersfield, 2003. Barrios Hernandez, C.R., « Thinking parametric design: introducing parametric Gaudí », Design Studies, vol. 27, n° 3, mai 2006, pp. 309‑324. Barthélémy, J.-H., « Simondon et la question des âges de la technique », Appareil, juin 2008, [En ligne]. <http://journals.openedition.org/ appareil/450>. (Consulté le 16 juillet 2019). Barthélémy, J.-H., « Deux points d’actualité de Simondon », Revue philosophique de la France et de l’etranger, n° 3, 2006, pp. 299‑310. Baverel, O., Nexorade : a family of interwoven structures, 1 décembre 2000. Baverel, O. et Douthe, C., « Nexorade: a structure for ‘free form’ architecture », 2006, p. 5. Baverel, O. et Larsen, O.P., « A Review of Woven Structures with Focus on Reciprocal Systems », International Journal of Space Structures, octobre 2012, pp. 281‑288. Baverel, O. et Nooshin, H., « Nexorades Based on Regular Polyhedra », Nexus Network Journal, vol. 9, n° 2, octobre 2007, pp. 281‑298. Baverel, O. et Nooshin, H., « Configuration processing of Nexorade using genetic algorithm », Journal of the International Association for Shells and Spatial Structures, vol. 45, mai 2004, pp. 99‑108. Baverel, O. et al., « Nexorades », International Journal of Space Structures, vol. 15, juin 2000, pp. 155‑159. Baverel, O. et Pugnale, A., « Reciprocal systems based on planar elements », dans Cruz, P. (éd.), Structures and Architecture, s.l., CRC Press, 27 juin 2013, pp. 456‑463, [En ligne]. <http://www.crcnetbase.com/doi/abs/10.1201/b15267-63>. (Consulté le 13 mars 2019). Brancart, S. et al., « Bending-active reciprocal structures based on equilateral polyhedral geometries », 2017, p. 11. Brancart, S. et al., « UNDULATUS: design and fabrication of a self-interlocking modular shell structure based on curved-line folding », dans, 20 août 2015. Burry, M., « Antoni Gaudí and Frei Otto: Essential Precursors to the Parametricism Manifesto », Architectural Design, vol. 86, n° 2, 2016, pp. 30‑35. Carpo, M., The second digital turn: design beyond intelligence, Cambridge, Massachusetts, The MIT Press, 2017 (Writing architecture). Carpo, M., The digital turn in architecture 1990-2010, Chichester, Wiley, 2013 (AD reader). Chilton, J., « Development of Timber Reciprocal Frame Structures in the UK », 2009, p. 8. Corio, E. et al., « Conception and parametric design workflow for a timber large-spanned reversible grid shell to shelter the archaeological site of the roman shipwrecks in pisa », International Journal of Computational Methods and Experimental Measurements, vol. 5, juin 2017, pp. 551‑561. Danz, C. et Johnson, B.R., « An investigation into mutually supporting structural forms », 2014, p. 22. David Jason Gerber, E.P., « Material SWarm articulations: The new view reciprocal frame canopy », 2014. Delville, J., Etude historique et expérimentale du pont arc-en-ciel, 2018. Douthe, C. et Baverel, O., « Morphological and Mechanical Investigation of Double-Layer Reciprocal Structures », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 191‑206. Douthe, C. et Baverel, O., « Design of nexorades or reciprocal frame systems with the dynamic relaxation method », Computers & Structures, vol. 87, n° 21‑22, novembre 2009, pp. 1296‑1307. Douthe, C. et al., « Design and construction of a shell-nexorade hybrid timber structure », 2018, p. 9.
150
Gage, M.F., « A Hospice for Parametricism », Architectural Design, mars 2016, [En ligne]. <http://onlinelibrary.wiley.com/doi/abs/10.1002/ ad.2034>. (Consulté le 3 juillet 2019). Gherardini, F. et Leali, F., « Reciprocal Frames in Temporary Structures: An Aesthetical and Parametric Investigation », Nexus Network Journal, vol. 19, n° 3, décembre 2017, pp. 741‑762. Goodwins, R., « Home in a Day », Popular Science; New York, janvier 2014, pp. 60‑63. Gramazio, F. et Kohler, M., The robotic touch: how robots change architecture, Zurich, Park Books, 2014. Gustafsson, J., Connections in Timber Reciprocal Frames, CHALMERS UNIVERSITY OF TECHNOLOGY, 2016, [En ligne]. <http:// publications.lib.chalmers.se/records/fulltext/243237/243237.pdf>. (Consulté le 13 mars 2019). Houlsby, G.T., « John Wallis and the Numerical Analysis of Structures », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 207‑217. Jürgen Mayer, « Metropol Parasol, Seville », Architectural Design, vol. 82, n° 5, 2012, pp. 70‑73. Kazuma Goto, Ryota Kidokoro et Takeshi Matsuo, « Rokko Mountain Observatory », 2011. Larsen, O.P., « Reciprocal Frame (RF) Structures: Real and Exploratory », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 119‑134. Larsen, O.P., « Reciprocal Frame Architecture in Japan », 2009, p. 11. Larsen, O.P., Reciprocal frame architecture, Amsterdam, Elsevier, 2008. Li, J.-M., Universität Stuttgart et Institut für Tragkonstruktionen und Konstruktives Entwerfen, Timber Shell Structures Form-finding and structural analysis of actively bent grid shells, 2017. Liddell, I., « Frei Otto and the development of gridshells », Case Studies in Structural Engineering, vol. 4, décembre 2015, pp. 39‑49. Liotta, S.-J.A., « Experimenting the Use of Wood in Contemporary Architecture: Integrating Research into Practice », dans Bianconi, F. et Filippucci, M. (éds.), Digital Wood Design, vol. 24, Cham, Springer International Publishing, 2019, pp. 1317‑1354, [En ligne]. <http://link. springer.com/10.1007/978-3-030-03676-8_53>. (Consulté le 23 juillet 2019). Mahesh Daas et Andrew John Wit, Towards a robotic architecture, Novato, CA, Applied Research and Design Publishing, 2018. Mau, B., « An Incomplete Manifesto for Growth », I D, vol. 46, n° 2, 1999, pp. 56‑59. Mc Lean, « In the Frame », 2011. Mckenna, E. et al., « Digital Fabrications: Joints », s.d., p. 63. Mellado, N. et al., « Computational Design and Construction of Notch-Free Reciprocal Frame Structures », dans Block, P. et al. (éds.), Advances in Architectural Geometry 2014, Cham, Springer International Publishing, 2015, pp. 181‑197, [En ligne]. <http://link.springer. com/10.1007/978-3-319-11418-7_12>. (Consulté le 26 février 2019). Melvin, J., « Serpentine Gallery Pavilion 2005 », Architectural Design, vol. 75, n° 6, 2005, pp. 102‑106. Mesnil, R. et al., « Morphogenesis of surfaces with planar lines of curvature and application to architectural design », Automation in Construction, vol. 95, novembre 2018, pp. 129‑141. Mesnil, R. et al., « Form finding of nexorades using the translations method », Automation in Construction, vol. 95, novembre 2018, pp. 142‑154. Mesnil, R. et al., « Marionette Meshes: Modelling free-form architecture with planar facets », International Journal of Space Structures, vol. 32, n° 3‑4, juin 2017, pp. 184‑198. Mesnil, R., Douthe, C. et Baverel, O., « Advances in Architectural Geometry 2015 - Marionette Mesh: From Descriptive Geometry to Fabrication-Aware Design », 2016, [En ligne]. <https://vdf.ch/index.php?route=product/product/download&eoa_id=9089&product_ id=2001http://>. (Consulté le 8 avril 2019). Mesnil, R. et al., « Form finding and design of a timber shell-nexorade hybrid », 2018. Mesnil, R. et al., « Fabrication-aware shape parametrisation for the structural optimisation of shell structures », Engineering Structures, vol. 176, décembre 2018, pp. 569‑584. Parigi, D. et Kirkegaard, P.H., « Design and Fabrication of Free-Form Reciprocal Structures », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 69‑87. Parigi, D. et Kirkegaard, P.H., « The Reciprocalizer: an Agile Design Tool for Reciprocal Structures », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 61‑68. Parigi, D. et Pugnale, A., « Three-dimensional reciprocal structures: morphology, concepts, generative rules », 2012, p. 9. Parigi, D. et al., « Static and Kinematic Formulation of Planar Reciprocal Assemblies », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 37‑59. Pizzigoni, A., « Leonardo & The reciprocal structures », s.d., p. 32.
151
Pugnale, A. et Sassone, M., « Structural Reciprocity: Critical Overview and Promising Research/Design Issues », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 9‑35. Pugnale, Henning, P. et Sassone, M., « The principle of structural reciprocity : history , properties and design issues », dans, 2011. Puyol, A.G., « Mass Customization of Reciprocal Frame Structures », 2015, p. 12. Rappaport, N., « A Deeper Structural Theory », Architectural Design, vol. 80, n° 4, 2010, pp. 122‑129. Rizzuto, J.P., « Experimental investigation of reciprocally supported element (RSE) lattice honeycomb domes structural behaviour », Engineering Structures, vol. 166, juillet 2018, pp. 496‑510. Robeller, C., Mayencourt, P. et Weinand, Y., « CNC-FABRICATED, INTEGRATED MECHANICAL ATTACHMENT FOR STRUCTURAL WOOD PANELS », 2014, p. 10. Roelofs, R., « Three-Dimensional and Dynamic Constructions Based on Leonardo Grids », 2018. Roelofs, R., « Leonardo da Vinci’s Bar Grids », s.d. Romain Mesnil, Lionel Du Peloux et Cyril Douthe, « Construire le Courbe », s.d., [En ligne]. <https://educnet.enpc.fr/pluginfile.php/24366/ (Consulté le 17 juillet 2019).
mod_resource/content/0/GridShellsRomainMesnil.pdf>.
Sakamoto, T. et Ferré, A., From control to design: parametric/ algorithmic architecture, Barcelona, Actar, 2008. Schling, E., Hitrec, D. et Barthel, R., « Designing Grid Structures Using Asymptotic Curve Networks », Humanizing Digital Reality, 2018, pp. 125‑140. Schumacher, P., « Parametricism as Style - Parametricist Manifesto », 2008, p. 3. Sigrid Adriaenssens et al., Shell structures for architecture: form finding and optimization, London ; New York, Routledge/ Taylor & Francis Group, 2014. Simondon, G., Du mode d’existence des objets techniques, Paris, Aubier-Montaigne, 1969 (Analyse et raisons 1). Song, P. et al., « Reciprocal frame structures made easy », ACM Transactions on Graphics, vol. 32, n° 4, juillet 2013, p. 1. Stanley M. Davis, « Future Perfect », Small Business Reports, vol. 15, n° 4, 1990, p. 48. Szostok, K., L’influence des logiciels paramétriques sur le processus de la conception en architecture, 2012. Tamke, M. et al., « Lamella Flock », dans, 1 janvier 2010, pp. 37‑48. Tedeschi, A., Parametric architecture: with Grasshopper® : primer, Brienza (Potenza), Italy, Le Penseur, 2011. Tepavčević, B. et al., « Design to fabrication method of thin shell structures based on a friction-fit connection system », Automation in Construction, vol. 84, décembre 2017, pp. 207‑213. Thönnissen, U., « A Form-Finding Instrument for Reciprocal Structures », Nexus Network Journal, vol. 16, n° 1, avril 2014, pp. 89‑107. Torashichi Sumiyoshi et Gengo Matsui, Wood joints in classical japanese architecture, 1989, [En ligne]. <https://fabiap.files.wordpress. (Consulté le 19 avril 2019).
com/2011/01/wood-joints-in-classical-japanese-architecture.pdf>.
Tunç, E., « Shaping a timber reciprocal frame structure », 2015. Vrontissi, M. et Thoennissen, U., « Full-scale design explorations in architecture education: small-scale reciprocal structures for outdoor 20 septembre 2015.
use », dans,
WANTIER, L., « FRANCHIR LE GRAND PAR LE PETIT », Issuu, 2016, [En ligne]. <https://issuu.com/l_wtr/docs/selection>. (Consulté le 8 2019).
mars
Weller, B., Tasche, M. et Baatz, J., « Lamella Roof Constructions by Hugo Junkers », 2009, p. 11. Yilmaz M. Fatih,
author,
La conception en architecture: du traditionnelle au paramétrique: une approche computationnelle nouvelle, 2015.
Zlata Tošić, Sonja Krasić et Dragoslav Stojić, « Constructive system of reciprocal frames in terms of contemporary architecture », 2018.
152
d. Filmographie ARCHICAD, Algorithmic Design Meets BIM, s.d., [En ligne]. <https://www.youtube.com/watch?v=UhCdFa1LpoQ>. (Consulté le 29 avril 2019). Ayse Esin Durmaz, 50 digital joints real assembly, 2015, [En ligne]. <https://www.youtube.com/watch?v=PzTpfLcL1Y8>. (Consulté le 23 juillet 2019). Harvard GSD, Kengo Kuma, “From Concrete to Wood: Why Wood Matters”, s.d., [En ligne]. <https://www.youtube.com/ (Consulté le 2 juillet 2019).
watch?v=LynYUwYZXqk>.
Parvin, A., L’architecture pour les gens par les gens, s.d., [En ligne]. <https://www.ted.com/talks/alastair_parvin_architecture_for_the_ people_by_the_people?language=fr>. (Consulté le 10 juillet 2019). THINkSHELL, The thinkshell architectural geometry lessons EIKE SCHLING, s.d., [En ligne]. <https://www.youtube.com/ watch?v=Zq6Ych9rbPc&feature=youtu.be&fbclid=IwAR0yWfFDNyoKrIQ0_kUvTNS0XTnXY2ZMGBMnaKYge6ku7MsXO8Vt3-cElzs>. (Consulté le 11 mars 2019). THINkSHELL, The thinkshell architectural geometry lessons MARK PAULY, s.d., [En ligne]. <https://www.youtube.com/ watch?v=cRYzc22Hw68&feature=youtu.be&fbclid=IwAR3KspKIjsxm54f3hVOsKssgTqrj2Uyo1ILMoW6o_BFSt629nTGa5C5yaVo>. (Consulté le 20 mars 2019). FORM FINDING – Frei Otto: Spanning the Future, s.d., [En ligne]. <https://www.youtube.com/watch?v=Gb5p0htTj4U>. (Consulté le 8 août 2019). Levage d’une structure Gridshell Ekilaya, s.d., [En ligne]. <https://vimeo.com/300510035>. (Consulté le 18 juillet 2019).
153
154
155
156