
30 minute read
LA PLACE DU MOUVEMENT EN ARCHITECTURE


LA PLACE DU MOUVEMENT EN ARCHITECTURE01.
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
Advertisement
I.1 / HISTOIRE DU MOUVEMENT EN ARCHITECTURE
Ce chapitre va s’intéresser à l’histoire du mouvement en architecture, pour comprendre de quelle manière et dans quels buts le mouvement a fait son apparition dans les constructions. Il sera aussi question de découvrir à quel moment nous sommes passés d’une architecture cinétique actionnée par l’homme, à une automatisation de ces systèmes grâce à la mécanique et l’informatique. Une approche philosophique par les courants de pensée est également nécessaire pour ensuite pouvoir comparer ces théories du XXème siècle, aux réalisations actuelles. Enfin, il est nécessaire de définir quels sont les différents types de mouvement que l’on peut retrouver dans les projets de notre époque et ainsi pouvoir établir lesquels seront traités, pour leur lien avec la recherche de « performances » et leur faculté d’adaptation.
I.1.a / Première réalisation d’architecture cinétique
Les premières réalisations cinétiques en architecture remontent aux temps de l’Empire Romain. Ils employaient des toits mobiles en tissu, pour protéger les théâtres et amphithéâtres, afin d’apprécier le spectacle à l’ombre. Ce fut le cas pour le Colisée malgré ses dimensions importantes, pour lequel un toit était indispensable pour éviter d’être torturé par une longue exposition un soleil. Ce toit pour le Colisée était un défi technique inédit, tout d’abord par la taille du toit qu’il faudrait déployer, mais aussi pour le rendre mobile. Malheureusement, cette technique s’est perdue à travers les âges, ne nous laissant qu’une vague idée de son fonctionnement.
Surnommé le « Velarium » (signifiant « voile » en latin), il était composé de plusieurs morceaux de tissus assemblés et tenus par un ensemble de cordes organisées en toile, le tout soutenu par 240 mâts5 en bois, également espacés. Ce toit était légèrement incliné vers le bas avec une grande ouverture centrale. Ainsi, les spectateurs étaient protégés du soleil mais le spectacle de gladiateurs restait éclairé. Le toit utilisait le même tissu que
5 http://www.velario-colosseo-velarium-colosseum.com/
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
celui des voiles des galères. La complexité du système et sa fragilité nécessitait qu’il soit manipulé par des marins confirmés et était d’ailleurs considéré comme une mission prestigieuse.


Figure 1 - Colisée de Rome aux siècles des Césars
(Source :http://www.velario-colosseo-velarium-colosseum.com/) Figure 2 - Colisée de Rome en 2019

(Soucre : photographie personnelle)
I.1.b / Expérimentations du XXème siècle
C’est ensuite en grand bond dans le temps que nous devons effectuer pour trouver d’autres réalisations d’architecture cinétique notables. Le développement du mouvement mécanique suite à la révolution industrielle, a entraîné une tendance à la mobilité et aux changements constants, des thèmes qui se sont succédé à cette époque dans la littérature, les arts, le design industriel, mais également l’architecture.
En 1903, la maison rotative dite “héliotrope” est dévoilée par l’architecte Eugène Pettit à l’Exposition de l’Habitation de Paris. 6 Un modèle basé sur la maison qu’il a construite dans le sud de la France, la “Villa Tournesol”. De larges ouvertures en façade font entrer de la lumière. Pour avoir cette lumière en permanence dans la pièce désirée, la maison a été construite sur un plateau tournant, dont il fallait actionner un levier pour la faire tourner. Ce dispositif a été conçu pour l’apport solaire, avec la conviction de l’époque que le soleil permettait de guérir la plupart des maladies. Pour suivre la course du soleil, l’usager devait actionner un levier toutes les heures pour faire pivoter la maison de quelques centimètres.
6 RANDL Chad, Revolving Architecture: A History of Buildings that Rotate, Swivel and Pivot, 2008, p.76
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
Ce projet fera des échos jusqu’aux États-Unis, une idée très intéressante pour les Américains, qui permettait de garder la maison et ses habitants en bonne santé.
Toujours selon les bienfaits de l’héliotropisme, Jean Saidman fonde l’Institut d’Héliothérapie de Vallauris en France. Basé sur une base octogonale à deux niveaux, le dernier étage est un observatoire météorologique qui est le seul à pivoter. 7
Ce projet regroupe une douzaine d’abris rotatifs en bois. Des abris contenant seulement un ou deux lits et une commode. Les façades les plus larges de l’abri étaient presque entièrement ouvertes. Elles étaient construites sur un plateau tournant, utilisant le même principe que la Villa Tournesol d’Eugène Pettit. Ce modèle a été repris par des particuliers souhaitant avoir leur propre sanatorium dans leur cour.

Suivant le principe précédemment évoqué de la cabane sur plateau tournant, Georges Bernard Shaw a réalisé une de ces cabanes, dans laquelle il passa vingt années de sa vie à écrire. Il évoque plusieurs avantages quant au pivot de son abri. Il n’avait pas besoin de lumière artificielle pour écrire, puisqu’il suffisait de tourner sa cabane plusieurs fois dans la journée pour être constamment baigné de lumière naturelle. Comme la fenêtre avant était constamment éclairée directement, l’abri n’avait pas besoin de fenêtres sur les faces
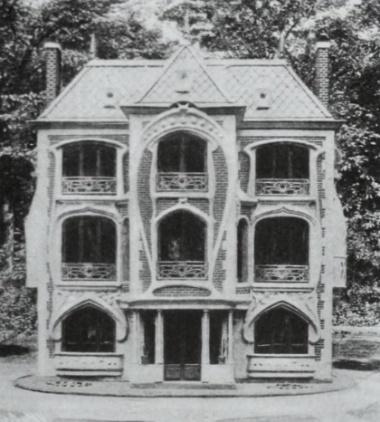

Figure 3 - Heliotropic House– Eugène Pettit – 1903 (Source : 7) Figure 4 - Revolving Solarium - Jean Saidman -1935 (Source: 7)
7 RANDL Chad, Revolving Architecture: A History of Buildings that Rotate, Swivel and Pivot, 2008, p.76
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
latérales, ce qui permet d’améliorer l’isolation de la cabane qui est un atout certain en climat froid. En été, il contre la surchauffe en ouvrant les deux fenêtres opposées, créant ainsi un courant de ventilation naturelle.
Angelo Invernizzi, un ingénieur ferroviaire, a réutilisé l’idée des rails pivotants pour l’appliquer à sa création, une maison appelée « Villa Girasole »8, conçue la même année que l’Institut d’Héliothérapie de Vallauris de Jean Saidman. Ce qui différencie cette réalisation des projets précédemment analysés, c’est l’échelle du bâtiment et la taille du rayon de giration qui fait de ce projet, un étendard de la technologie du bâtiment rotatif. La maison est composée de deux ailes à deux étages contenant les différentes pièces de la maison. La tour centrale abrite l’escalier et l’ascenseur, et est le centre de rotation de la maison. Nous pouvons remarquer sur la photographie ci-contre, le tracé du rayon de giration, qui marque le dessin des aménagements extérieurs. Sous les deux ailes, se trouvent des roues placées pour rouler selon ce chemin dessiné. Le système est motorisé par deux moteurs diesel et pivote d’approximativement 23 centimètres par minutes.


Figure 5 - Kelling Sanatorium for Working Men in Norwich(Source : 8)

Figure 6 - Rotating Writing Shed- George Bernard Shaw (Source: 8)

Figure 7 - Villa Girasole - Angelo Invernizzi (Source : 8)

8 RANDL Chad, Revolving Architecture: A History of Buildings that Rotate, Swivel and Pivot, 2008, p.76
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
L’ingénieur Albert Buranelli a développé le Gyro Parking Garage, un concept de garage rotatif intéressant pour l’espace qu’il permettrait d’économiser. 9 Le principe est simple, la voiture entre dans l’ascenseur, qui le transporte ensuite à un étage comportant des places vides. Le plateau va ensuite tourner pour que la voiture se gare en face de la sortie de l’ascenseur. C’est le principe de plateau tournant déjà élaboré par les maisons rotatives du début du siècle, qui permet de réduire les espaces inutilisés. Ici, ce système permet de supprimer les espaces de circulations automobiles, les voies et les rampes.

Le Space Needle est l’un des monuments les plus reconnaissables dans le monde et est une icône de Seattle. Construit pour l’Exposition universelle de 1962, dont le thème était « L’âge de l’espace »10, le design futuriste de la tour s’inspire de l’idée que la foire avait besoin d’une structure pour symboliser les aspirations de l’humanité à l’ère spatiale. Il inclut à son premier niveau, un restaurant installé sur plateau tournant, avec sa cuisine fixe au centre.


Figure 9 - Rotogarage– Albert Buranelli (Source : 9) Figure 9 - Space Needle- Edward E. Carlson (Source: 10)

9 RANDL Chad, Revolving Architecture: A History of Buildings that Rotate, Swivel and Pivot, 2008, p.96 10 RANDL Chad, Revolving Architecture: A History of Buildings that Rotate, Swivel and Pivot, 2008, p.111
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
I.1.c / Courants de pensée d’une architecture en mouvement
Entre 1960 et 1975, de nombreux jeunes architectes n’étant pas satisfaits de l’architecture produite à leur époque, voulurent exprimer leurs idées par des essais et des expositions afin de diffuser leur vision du futur paysage architectural. Ces visions souvent utopiques, proposent de nouvelles conceptions de la ville et du bâtiment, à travers le thème de la mobilité.11
Yona Friedman présente le « Manifeste de l’architecture mobile »12 en 1958, posant une question importante : « pourquoi les architectes décident pour les gens qui vivent dans leurs bâtiments”. Il fonde le « Groupe d’Études d’Architecture Mobile » (GEAM)”.
En 1959, il introduit “l’urbanisme spatial” où la ville posséderait des structures flexibles pouvant être modifiées selon les besoins. Elle suggère une ville composée de murs, planchers et plafonds amovibles, avec des réseaux facilement modifiables et de grands modules mobiles qui peuvent voyager en volant dans une ville pensée sur trois niveaux.
Ensuite, Cédric Price a posé une autre question : « Et si le bâtiment ou l’espace pourrait être constamment généré ou régénéré ? » Price a tenté de répondre à sa question quand il a conçu le « Fun Palace » en 1961. Le projet comprend des théâtres, des cinémas, des

Figure 10 - Spatial Town - Yona Friedman (Source: 12) Figure 11 - Fun Palace - Cedric Price(Source: 12)

11 ROY Eve, La question de la mobilité dans les représentations et expérimentations architecturales en Europe de 1960 à 1975, Rives méditerranéennes, 2009, URL: http://journals.openedition.org/rives/2693. 12 http://www.frac-centre.fr/collection-art-architecture/friedman-yona-58.html?authID=72
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
restaurants, des ateliers, des zones de rassemblement qui peuvent être assemblées, déplacées, réarrangées continuellement. 13
Archigram (association des termes architecture et télégramme) est initialement un groupe de jeunes architectes réalisant des revues d’architecture avant-gardiste des années 60, proposant un renouvellement de l’architecture et de l’urbanisme au travers d’utopies urbaines. Ils décident de s’affranchir du respect de l’histoire, de la réflexion du site. Ils proposent des idées tranchant radicalement avec le passé, proposant des bâtiments et villes machines modulables et en mouvement.14 Archigram intègre la culture pop à l’architecture, sous influence de la BD et de la sciencefiction et traite du mythe d’une population individualiste, consumériste et sans attache dont les innovations technologiques leur permettraient de dépasser leur mode de vie sédentaire. Ils conçoivent en 1964 “Living City”, la ville vivante mécanique, illustrant de géants “bâtiment-ville” se déplaçant grâce à des pieds articulés. C’est la pensée d’une ville machine qui pourrait se déplacer. Elle apparaît alors comme un organisme vivant et en mouvement. Entre 1960 et 1974, Archigram a créé plus de 900 dessins, dont le plan de la « Plug-In City » de Peter Cook. Ce projet illustre un bâtiment-machine colossal sur lequel peuvent venir s’attacher des modules intégrant différentes fonctions et changeant régulièrement les usages du bâtiment.

Figure 12 - Living City– Archigram (Source : 14)
13 https://www.moma.org/collection/works/842 14 https://indexgrafik.fr/archigram/
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021

Figure 13 - Cities : Moving – Archigram (Source : 14)

Figure 13 - Plug-In City– Archigram (Source: 14)
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
I.2 / DEFINITIONS ET CONCEPTS
I.2.a / Architecture Intelligente
Le concept d’architecture intelligente a été introduit pour contrôler et gérer le bâtiment par le biais d’une communication qui s’effectue entre celui-ci et ses utilisateurs. On parvient à ce résultat en utilisant des systèmes de haute technologie pour répondre aux besoins des utilisateurs, comme le confort, la productivité, et les économies d’énergie. Les systèmes du bâtiment comprennent tout ce qui le contrôle comme la VMC, la mécanique, la structure, le contrôle de l’éclairage, le contrôle de l’accès, la sécurité, la gestion de l’immeuble, l’entretien, le réseautage local et la gestion de l’énergie. 15
L’architecture intelligente a connu différentes définitions, sa signification a évolué au cours des années, en parallèle de la révolution informatique. Par exemple, au symposium international de Toronto en 1985, l’architecture intelligente a été décrite ainsi « le bâtiment intelligent combine des innovations, technologiques ou non, avec une gestion efficace, afin de maximiser le rendement du capital investi ». Cette définition est aujourd’hui qualifiée de « partielle » car elle ne tient en compte que le facteur du rendement. Elle décrit ainsi le bâtiment intelligent comme un système se régulant afin de faire le plus d’économies possible, sans se soucier du confort de ses utilisateurs (par le niveau d’intensité lumineuse, le confort thermique, le renouvellement d’air…).
En 1996, Bob a proposé une définition plus technique « un bâtiment qui peut comprendre la technologie permettant de contrôler automatiquement les dispositifs et les systèmes. » 2 ans plus tard, DEWG propose une définition se basant sur les utilisateurs: « le bâtiment intelligent est plus sensible aux besoins des utilisateurs et a la capacité de s’adapter aux nouvelles technologies ou aux changements dans les structures organisationnelles » 16 , et évoque un certain nombre de critères qui doivent être respectés afin d’obtenir un bâtiment intelligent.
15 SHERBINI Khaled et KRAWCZYK Robert, Overview of Intelligent Architecture, ASCAAD International conference, 2004, p.138-139 16 SHERBINI Khaled et KRAWCZYK Robert, Overview of Intelligent Architecture, ASCAAD International conference, 2004, p.138-139
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
La définition de l’architecture intelligente devrait donc inclure tous ces critères et systèmes :
- Système d’« inputs » qui reçoit l’information par le biais d’un capteur - Traitement et analyse de l’information - Système de sortie « output » qui réagit à l’input sous forme de réponse. - Considération du temps approprié de la réponse - Capacité d’apprentissage
I.2.b / Architecture Interactive
L’architecture interactive se définit comme une interface entre les hommes et les ordinateurs17 . En considérant le bâtiment comme une enceinte qui définit un espace, cette interactivité se manifeste par certaines activations des composants de cette espace, réalisées par des participants. En outre, les composants du bâtiment comme les murs, le plancher et le plafond, agissent comme des surfaces interactives. Cette expérience architecturale ne s’adresse pas à des utilisateurs, mais à des participants, ayant conscience de l’interaction, et que leurs actions entraînent une réponse. Cette interactivité se base sur une communication à double sens entre les participants et les composants de l’installation, parmi lesquels : les périphériques d’entrée, de traitement de l’information et de sortie. Qui répondent respectivement aux trois dimensions caractéristiques de l’interaction : la dimension sensible (entrée), la dimension de réflexion (traitement) ainsi que la dimension de réponse (sortie).
MegaFaces était une installation architecturale expérimentale18, installée lors des Jeux Olympiques d’Hiver de Sotchi. L’installation consistait en un écran géant, composé de sphères à LED, pouvant réaliser individuellement un mouvement linéaire. Permettant in
17 ROMANO R., AELENEI L., AELENEI D., MAZZUCCHELLI E., What is an Adaptative Facade, Analysis of Recent Terms and Definitions from an International Perspective, Journal Of Facade Design & Engineering, Vol.4, N°3, 2018, p171-172 18 FOX Michael A., Interactive Architecture: Adaptive World, Princeton Architectural Press, 19 Avril 2016, p.80
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
fine de changer la forme générale de l’écran, de former des volumes. Cet écran était alimenté d’informations générées par les participants à l’aide d’une batterie de photomatons à numérisation 3D.19 Cette installation a été réalisée à la suite d’un concours lancé par MegaFon, un des plus grands opérateurs téléphoniques de Russie. L’opérateur voulait établir un lien fort avec ses clients, mais aussi le public russe, ainsi que le monde entier qui avait les yeux rivés sur les Jeux Olympiques de Sotchi.
La façade cinétique mesure 18 mètres de large, 8 mètres de haut et peut avoir une profondeur de 2,4 mètres selon la position minimale de chaque bras télescopique. Il est composé de 11000 de ces bras sur lesquels sont disposés des sphères translucides LED.


Figure 14 - MegaFaces- Asif Khan Ltd. (Source : 19)
19 FOX Michael A., Interactive Architecture: Adaptive World, Princeton Architectural Press, 19 Avril 2016, p.80
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
I.2.c / Architecture Réactive
L’architecture réactive a la capacité de répondre aux besoins de ses utilisateurs. 20 Elle n’a pas besoin d’être intelligente, il n’est pas nécessaire que la ou les réponses données soient issues d’un processus intelligent. Un mur à forte inertie comme le béton, la pierre ou bien la terre crue, par exemple, répond à des soucis de confort de l’utilisateur, ils gardent la fraîcheur à l’intérieur quand il fait chaud à l’extérieur. Ce phénomène s’explique par une propriété intrinsèque au matériau, et n’est donc pas issue d’un processus intelligent.
Certaines définitions de l’architecture réactive montrent que le terme présente une forme spécifique de réponse qui serait cinétique. Michael Fox affirme en 2003, que « le cœur du système réactif est la façon d’implanter des structures mécaniques avec des comportements interactifs et intelligents » . 21 Sterk (2003) définit également l’architecture réactive comme « une classe d’architecture qui démontre une capacité à modifier sa forme, à refléter continuellement les conditions environnementales qui l’entourent ». Bien que la modification de la forme ne soit qu’un type de réponse, le terme d’architecture réactive ne contient pas le terme « intelligent » pour représenter une réponse qui serait cinétique, et devrait donc couvrir tous les types de réponses dans l’architecture.
La réponse intelligente cinétique qui est évoquée dans les définitions de Fox et Sterk pousse l’architecture intelligente plus loin, en intégrant les facteurs « mouvement » et « temps », qui est expliqué dans la partie suivante.
20 SHERBINI Khaled et KRAWCZYK Robert, Overview of Intelligent Architecture, ASCAAD International conference, 2004, p.143 21 SHERBINI Khaled et KRAWCZYK Robert, Overview of Intelligent Architecture, ASCAAD International conference, 2004, p.143
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
I.2.d / Architecture Cinétique Adaptative
Le concept d’architecture cinétique est la conception de bâtiments avec des éléments mobiles et automatiques. La forme du bâtiment est modifiée pour répondre aux besoins des personnes et s’adapter aux conditions environnementales.22
Le concept d’espace adaptable signifie qu’il réagit de manière conforme aux approvisionnements de toute activité humaine, depuis l’habitation, les loisirs, l’éducation, la médecine, le commerce et l’industrie. L’adaptation s’étend d’un intérieur, qui est multiusage réorganisé à une structure, et a la capacité de se transformer. Elle est capable de répondre à divers paramètres dans le temps. Le temps est un facteur essentiel dans le concept d’architecture adaptative. Par conséquent, l’architecture cinétique adaptative peut être considérée comme une architecture en mouvement s’adaptant dans le temps.
Fox (2000), définit l’architecture cinétique comme « un bâtiment à emplacement ou mobilité variable et/ou à géométrie ou mouvement variable ». Il décrivait divers types de systèmes cinétiques, dont le système de pliage. Le concept cinétique n’est donc pas à l’origine intelligent, mais il représente la capacité de contrôler la structure en déplaçant une partie ou la totalité de celle-ci. La nouvelle direction est d’introduire le concept cinétique à l’intelligent comme l’une des réponses qui peuvent modifier la forme du bâtiment. Calatrava a donné quelques exemples pour appliquer le mouvement à la construction. Indépendamment de la fonction des applications cinétiques de Calatrava, sa contribution montre la possibilité d’avoir une forme mobile ; le toit du Musée Milwaukee, par exemple, peut s’ouvrir et se fermer.
L’étape suivante commence par la définition d’Oosterhuis (2003), qui stipule que l’architecture cinétique renvoie à « un bâtiment qui est contrôlé par un système de capteurs afin de pouvoir répondre en fonction des données reçues sous forme de mouvement ».
22 SHERBINI Khaled et KRAWCZYK Robert, Overview of Intelligent Architecture, ASCAAD International conference, 2004, p.144-145
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021

Figure 15 - Milwaukee Art Museum- Santiago Calatrava (Source : Calatrava.com)
Un bâtiment s’adaptant à son environnement, peut atténuer son empreinte carbone par un mouvement adoptant des stratégies d’économie d’énergie, telles que l’orientation et les ouvertures de bâtiments, dans le but de maximiser les apports lumineux et thermiques du soleil, en évitant un gain de chaleur superflu. 23
Cette adaptation se fait grâce à des capteurs multiples (suivi de la course du soleil, de l’intensité lumineuse, de chaleur, d’humidité, de vitesse du vent…) captant des informations de l’environnement, envoyées à un système informatisé qui les traite. Mais quand celles-ci sont combinées avec un système informatisé intelligent qui peut gérer toutes les actions, les performances sont plus importantes. Avec un système entièrement intégré, les composants individuels comprennent les actions des autres et peuvent être contrôlés en coopération pour optimiser les performances.
La réponse aux stimuli reçu de l’environnement, aura pour objectif de créer un mouvement, qui permettra au bâtiment de s’approcher au maximum des données optimales définies à la conception (fourchette de valeurs de températures de confort, d’intensité lumineuse correspondant à l’activité exercée dans le bâtiment). Ce mouvement de réponse dépendra du système conçu pour le bâtiment.
23 FOX M., KEMP A., Interactive Architecture, Princeton Architectural Press, 4 février 2009, p. 109
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
Michael Fox a classé, dans un article de recherche universitaire24 , les systèmes de contrôle cinétique en six types selon leur niveau de complexité, en se basant sur les écrits de Jules Moloney dans son ouvrage « Designing Kinetics for Architectural Façades : State Change » :
Contrôles internes : Ils n’ont aucun contrôle direct ou mécanisme comme des charnières mécaniques. Les systèmes de cette catégorie comportent un contrôle interne des contraintes de rotation et de glissement inhérentes à la construction. Dans cette catégorie, l’architecture est déployable et transportable. De tels systèmes possèdent le potentiel de mouvement mécanique dans un sens de construction, mais ils ont tout dispositif ou mécanisme de contrôle direct.
Contrôles directs : Ils sont déplacés directement par une source d’énergie à l’extérieur des dispositifs. Le mouvement est actionné directement par une source d’énergie, pouvant être électrique, ou bien généré par l’action de l’homme ou par un comportement biomécanique répondant à des conditions environnementales.
Contrôles indirects : Ils dépendent d’un système de rétroaction du capteur. Le mouvement est actionné indirectement via un système de capteurs. Le système de contrôle de base commence par une entrée de l’information par le biais d’un capteur. Il doit ensuite transmettre un message à un dispositif de commande. Le dispositif de commande transmet une instruction de fonctionnement marche/arrêt à une source d’énergie pour l’actionnement du mouvement. Nous définissons ici le contrôle indirect comme une réponse unique autocontrôlée à un stimulus. 25
Contrôles indirects réactifs : ils dépendent de multiples capteurs de rétroaction. Le système de base de fonctionnement est le même que dans les systèmes de contrôle indirect. Cependant, le dispositif de contrôle peut prendre des décisions basées sur
24 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.5 25 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.6
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
l’information générée par de nombreux capteurs, et ainsi prendre une décision optimisée qui sera envoyé à l’actionneur pour opérer un mouvement sur un objet unique.26
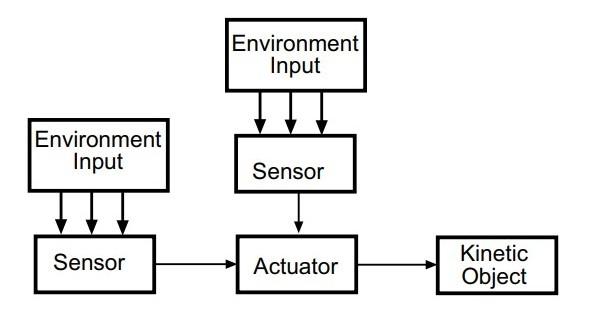
Figure 17 – Schéma Contrôle Indirect (Source : 24)

Figure 16 – Schéma Contrôle Indirect Réactif (Source : 25)
26 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.7
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
Contrôles indirects réactifs omniprésents : Ils ont la capacité de prédire en utilisant un réseau de contrôles avec des algorithmes prédictifs. Le mouvement induit par ce système est le résultat de nombreux ensembles de capteurs/moteurs autonomes (actionneurs) agissant ensemble comme un tout, en réseau. Le système de contrôle nécessite un algorithme de « rétroaction » qui est prédictif et auto-adaptatif.27
Contrôles indirects réactifs heuristiques : Ils dépendent de réseaux à médiation algorithmique qui ont une capacité d’apprentissage.28 L’heuristique peut être définie comme un ensemble de règles qui augmente les probabilités de résoudre un problème. Conceptuellement, il s’agit de la capacité d’apprendre de l’expérience. L’ajustement du temps de décision est un exemple de reprogrammation et d’ajustement du système sur la base de nouvelles informations ; l’information peut provenir de personnes ou de capteurs. Par exemple, dans une salle de réunion, le système peut sentir le nombre croissant de personnes, de sorte qu’il réduit la

Figure 18 - Schéma Contrôle Indirect Réactif Omniprésent (Source : 27)
27 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.8 28 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.9
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
température de 24 à 18 degrés Celsius pour surmonter la chaleur de 20 personnes. La personne autorisée peut ensuite réduire la température à 15 °C ; le système devrait se rendre compte que son calcul n’était pas très précis. Avec 30 personnes, le système devrait calculer la chaleur de chaque personne en fonction de la dernière expérience.

Figure 19 - Schéma Contrôle Indirect Réactif Heuristique (Source : 28)
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
I.3 / LES DIFFÉRENTES SOLUTIONS D’ARCHITECTURE CINÉTIQUE ADAPTATIVE
I.3.a / Systèmes cinétiques structurels
Les systèmes cinétiques structurels sont définis comme des bâtiments et/ou des composants de bâtiments à mobilité, emplacement et/ou géométrie variable. Les capacités d’un système cinétique structurel peuvent être le pliage, le glissement, l’expansion et la transformation dans la taille et de la forme. D’autre part, les mouvements d’un tel système peuvent être générés par des moyens : pneumatiques, chimiques, magnétiques, naturels ou mécaniques. Enfin, les systèmes cinétiques structurels peuvent être classées en trois groupes, qui sont les structures cinétiques intégrées (bâtiment ou partie du bâtiment en mouvement), les structures cinétiques déployables, ainsi que les structures cinétiques dynamiques.
1 / Structures cinétiques intégrées
Les structures cinétiques intégrées visent à contrôler le système architectural principal ou le bâtiment, en réponse à divers facteurs. Par exemple, ce peut être un système intelligent en mouvement qui amortie les tremblements de terre.
Cette solution contrôle les mouvements d’un bâtiment à travers un système de tendons ou de masses mobiles, liées à une boucle de rétroaction des capteurs. Les changements sont provoqués par des facteurs environnementaux et humains et peuvent inclure un mouvement axial, la torsion, la flexion, les vibrations. L’ingénieur Guy Nordestrom nous affirme que « si un bâtiment était conçu comme un corps, il pourrait changer sa posture, resserrer ses muscles et ainsi résister au vent. En conséquence, sa masse structurelle pourrait littéralement être réduite de moitié. » 29
29 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.4
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
Le toit rétractable du court central Philippe-Chatrier, construit pour l’édition 2020 du tournoi de Roland-Garros, est signé Serge Ferrari. Grâce à ce toit, le tournoi ne sera plus perturbé par des interruptions dues aux intempéries.
Le toit rétractable de la cour Philippe-Chatrier est composé de 11 fermes, pesant chacune 330 tonnes métriques30. Chaque poutrelle est divisée en 7 sections mesurant 15 mètres de long. Chaque poutrelle est équipée de deux roues. Ces roues tirent les fermes le long de deux rails fixés au sommet des gradins. Ils sont actionnés par des moteurs électriques synchronisés. Le mouvement de chaque poutrelle est synchronisé avec chacune des fermes voisines et est dirigé par un système informatique qui contrôle quand le toit doit s’ouvrir ou se fermer.

Figure 20 - Court Philippe-Chatrier- Serge Ferrari (Source : 30)
2 / Structures cinétiques déployables
Ces structures sont facilement transportables et se trouvent habituellement dans un endroit de manière temporaire. Ces systèmes possèdent la capacité inhérente d’être construits et déconstruits. Leurs applications peuvent inclure des expositions itinérantes, des pavillons et des abris auto-assemblés dans les zones sinistrées.31
30 RAMBION Myrtille, « The roof: How does it work?», site web Roland Garros, 5 février 2020. https://www.rolandgarros.com/en-us/article/philippe-chatrier-court-roof-how-does-it-work 31 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.4-5
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021

Figure 21 - Rolling Bridge- Heatherwick Studio (Source : 32)
Le Rolling bridge pensé par Heatherwick Studio est un pont piétonnier sur le bassin de Paddington à Londres.32 En plus de permettre aux piétons de traverser le bassin, le pont devait s’ouvrir pour laisser passer des bateaux. Il est composé d’acier et de bois et s’étend sur une longueur de 12 mètres.
Le pont se lève en s’enroulant. Il se transforme lentement, passant d’un pont droit en une structure circulaire. Les actionneurs hydrauliques cachés dans les balustrades permettent à la structure de se courber en activant la rétractation des bras reliant les huit segments.
3/ Structures cinétiques dynamiques
Les systèmes dynamiques agissent indépendamment de l’ensemble architectural. Les applications peuvent inclure des persiennes, des portes, des cloisons, des plafonds, des murs et divers composants modulaires. Un exemple peut être un auditorium avec des configurations de plafond qui peuvent changer en fonction de l’auditoire et de l’emplacement des interprètes pour obtenir des propriétés acoustiques optimales. Ces structures peuvent être classées dans la sous-catégorie suivante :
- Systèmes mobiles : ils peuvent être déplacés physiquement d’un espace architectural à un autre.
32 https://archello.com/en/project/rolling-bridge
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
- Systèmes transformables : ils peuvent changer de forme pour prendre une autre configuration tridimensionnelle. Donc, ils sont généralement utilisés pour économiser de l’espace ou des besoins utiles.
- Systèmes cinétiques incrémentaux : ils peuvent être ajoutés ou soustraits d’un bâtiment. D’autre part, les dispositifs cinétiques peuvent être organisés pour créer des structures cinétiques différentes. En outre, il existe de nombreux modèles possibles, les modèles les plus courants sont :
a) Configuration centrique : Ce type dépend d’un point central comme point focal de l’espace ; il y a deux types de motifs dans cette configuration :
- Pivot : il est organisé à partir d’un élément de support principal (pivot) dans le centre de la forme et, généralement, les dispositifs cinétiques dans cette structure sont disposés pour être actionnés en périphérie de la forme. - Configuration périphérique : elle est organisée en une série d’éléments de support placés sur le périmètre de la forme.
b) Configuration linéaire : Ce type de mouvement dépend d’un axe (étroit ou incurvé), il se compose d’une série de dispositifs cinétiques qui sont reliés par leurs bords ou leurs sommets pour transmettre le mouvement d’un point à l’autre. 33
I.3.b / Architecture cinétique intérieure
Les architectes et les designers d’intérieur à travers l’histoire ont essayé de rendre nos espaces de vie et de travail plus dynamiques et transformables pour répondre aux besoins changeants de ses habitants. L’idée est appliquée à de nombreux niveaux, comme les meubles à usages multiples et les espaces flexibles.
33 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.4-5
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
Bien que les architectes dessinent des espaces ne pouvant abriter bien souvent qu’un seul usage, il se peut en pratique, qu’une même pièce accueille plusieurs usages. La cuisine sert dans un premier temps à préparer à manger mais peut également servir à regarder la télévision, discuter, travailler…, etc. Il est donc important de réfléchir à cet éventail de fonctions que peut abriter une pièce en amont, de sorte que l’on puisse passer d’une configuration à une autre pour favoriser telle ou telle fonction. Ce système doit être pensé dans la conception, pour permettre à des éléments du bâtiment d’être flexibles, permettre une reconfiguration facile et pouvant être automatisée.
Cette possibilité de reconfiguration est également intéressante pour les grands espaces intérieurs tel que les bureaux en open-space, les salles polyvalentes, les espaces d’exposition.
La maison rotative de Georges Clark est un espace proposant quatre fonctions différentes : la chambre, la salle de bain, la cuisine et le salon. La rotation du volume permet de changer la fonction de l’intérieur.34

Figure 22 – Rotating House- Georges Clark (Source : 34)
34 https://www.housebeautiful.com/uk/renovate/homes-makeovers/news/a989/amazing-spacesgeorge-clarke-william-hardie-futuristic-rotating-house/ https://www.youtube.com/watch?v=fJQLYsMQgZA
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021
L’appartement de 32m2 de Gary Chang peut être transformé en 24 pièces différentes créant ainsi un appartement virtuel de 768 mètres carrés. Les murs coulissants et un lit rétractable sont les éléments clés de cette transformation. L’appartement est l’un des 370 unités d’un immeuble de 17 étages situé à Hong Kong. 35
À l’âge de 14 ans, Gary Chang a emménagé dans cet appartement du 7ème étage. Lui, ses parents et ses trois sœurs partagent donc à l’époque, l’espace de ce petit appartement. À tel point que Gary Chang dormait dans le couloir d’entrée. Vivre dans un espace si petit l’a poussé à imaginer comment il pourrait utiliser au mieux chaque mètre carré. Il a entamé en tant qu’architecte, une transformation de cet appartement, en plusieurs phases. Il a rénové l’appartement quatre fois, transformant un appartement de 45 000 dollars en un appartement de luxe d’une valeur de 1,3 million de dollars.
La flexibilité pensée pour cet appartement se crée par le déplacement d’éléments compacts pour créer différentes configurations. L’architecte a créé des éléments amovibles de deux profondeurs différentes : 550 mm (bureau, armoire, etc.) et 900 mm (toilettes, lessive, baignoire...). Ces éléments forment deux zones fonctionnelles, sur les bords les plus longs de l’appartement. Une zone centrale devient l’espace pour travailler, manger, se reposer, étudier, s’habiller, etc…, selon l’élément déployé dans la pièce. Ils sont déplacés selon un système de rail au plafond et au plancher. Le lit se replie dans le mur grâce à un système hydraulique conservant l’espace libre en journée.

Figure 23 - 32m² Apartment- Gary Chang (Source : 35)
35 VAN PUCKE Olivier, Article: The 32m² apartment design by Gary Chang, Talkitect, 13 mars 2011
ENSAM - Mémoire de Master – Maxence Fromentin 2020 / 2021
I.3.c / Façades cinétiques
Le concept des façades cinétiques consiste à utiliser la transformation géométrique pour créer un mouvement ou un mouvement dans l’espace. Ce mouvement ou transformation affecte la structure physique ou les propriétés matérielles des façades du bâtiment, sans altérer sa structure. 36 Les façades cinétiques peuvent être déplacées dans l’espace par quatre transitions géométriques et peuvent être classées comme tel :
1) Translation : Le mouvement se produit dans une direction vectorielle
2) Rotation : L’objet est déplacé autour de tous les axes
3) Mise à l’échelle : Il s’agit d’une expansion ou d’une contraction de la taille.
4) Mouvement par déformation du matériau : il dépend des propriétés variables du matériau, comme la masse ou l’élasticité

Figure 24 - Mouvements façade cinétique - (Source : MOLONEY Jules, Designing Kinetics for Architectural Façades : State Change, Routledge Editions, 3 juin 2011, p.22)

36 FOX Michael A., YEH Bryant P., Intelligent Kinetic Systems, MIT Kinetic Design Group, p.5
Maxence Fromentin – Mémoire de Master - ENSAM 2020 / 2021


