
7 minute read
Upotreba 3D vida za preciznu paletizaciju proizvoda

from IRT3000 АДРИА #8

Španski tehnološki centar Tekniker, ki je takođe specializovan za oblast robotike, razvio je rešenje koje omogućava prikupljanje nasumično raspoređenih proizvoda iz kontejnera i slaganje u drugi kontejner na uredan način. Ugrađeni softver za 3D vid MV Tec Halcon osigurava precizno hvatanje proizvoda.
Potpuno automatizovano sakupljanje komponenti od strane robota je veliki tehnički izazov. Posebno je zahtevno u slučajevima kada komponente stignu do robota u neurednom stanju, ali leže jedna na drugoj, što zahteva ljudsku intervenciju. Španska tehnološka kompanija Tekniker razvila je aplikaciju zasnovanu na mašinskom vidu koja omogućava potpuno automatizovano sakupljanje komponenti iz skladišta pomoću dva robota. Pritom je posebno važna tehnologija 3D vida zasnovana na površinskom usklađivanju (Surface-based Matching), koja pouzdano prepoznaje prispele komponente, jer deluje kao oko robota i omogućava precizno hvatanje.

Tekniker, koji se nalazi u gradu Eibar u severnoj Španiji, specijalizovan je za razvoj tehnoloških rešenja za automatizaciju, industrijsku robotiku i senzorske tehnologije, između ostalog. Kompanija podržava širok spektar industrija, kao što su vazduhoplovna i automobilska, kao i mašinstvo i inženjerstvo proizvodnih pogona. Jedna od saradnica centra Tekniker je Cikautxo Group, španski proizvođač komponenti za prigušivanje vibracija i komponenti za prenos tečnosti za automobilsku industriju. Tim stručnjaka iz Teknikera razvio je za kompaniju Cikautxo robotski sistem za automatizovanu paletizaciju komponenti u industrijskoj proizvodnji, koji kontroliše mašinski vid. Roboti sakupljaju komponente koje neuređeno leže u kutiji i postavljaju ih na uredan način u skladište koje je posebno prilagođeno geometriji ovih komponenti, tako da su spremne za dalju obradu u proizvodnom toku.

Rasterećivanje zaposlenih kroz automatizaciju procesa
Do sada se paletizacija delova u grupaciji Cikautxo vršila isključivo ručno i cile je bio sveobuhvatna automatizacija procesa, koja bi ga ubrzala, povećala produktivnost i smanjila troškove. Pored toga, takva automatizacija oslobađa radnike od obavljanja monotonih i neergonomskih zadataka, da bi mogli da se fokusiraju na zahtjevnije zadatke, objašnjava Kepa Laka, šef automatizacije i robotike u Cikautxo Group. Da bi se uvela automatizacija procesa, jedna od opcija je bila upotreba mehatroničkog sistema, ali takav pristup nudi nizak nivo fleksibilnosti i pouzdanosti, a pored toga stvara mnogo buke. Iz tog razloga, Tekniker je odlučio da koristi rešenje zasnovano na mašinskom vidu.
Podešavanje sistema uključuje dva industrijska robota proizvođača Kuka, 3D skener kompanije Photonea, dubinsku kameru kompanije Intel, računar s instaliranim softverom za mašinski vid i kontroler Simatic PLC kompanije Siemens koji nadgleda čitavu ćeliju. Tokom procesa, jedan robot prvo pokupi veliki broj izbušenih delova iz ulaznog skladišta pomoću multifunkcionalne magnetne hvataljke i stavlja ih na dve transportne trake. Robot to obavlja na osnovu proračuna koji koristi podatke dubinske kamere i prilagođenog algoritma softvera za mašinski vid Halcon, koji kombinuje alate za 2D i 3D vid.
Softver za mašinski vid instaliran na računaru kontinuirano obrađuje podatke iz 3D skenera i pruža robotima informacije o položaju i orijentaciji komponenti na pokretnoj traci koje su najpogodnije za prihvatanje.
Na osnovu tih podataka drugi robot kupi komponente s transportne trake, takođe koristeći 3D vid, poravnava ih i slaže ih u skladišta na uredan način. Kada prvi robot prestane da sakuplja komponente iz ulaznog skladišta, pomaže drugom robotu da sakuplja komponente s transportne trake i slaže ih na uredan način, pri čemu je za slaganje svake komponenete potrebno 8 sekundi. Tokom procesa slaganja, komponente treba polagati u vođice u kontejneru tako da je prednja strana okrenuta prema gore. Sve ovo se radi s tolerancijom od 0,5 milimetara. Ako je prihvaćena komponenta prednjom stranom okrenuta prema dole, ona se prvo stavlja u uređaj za okretanje, a zatim ponovo pokupi da se u skladište složi pravilno okrenuta.
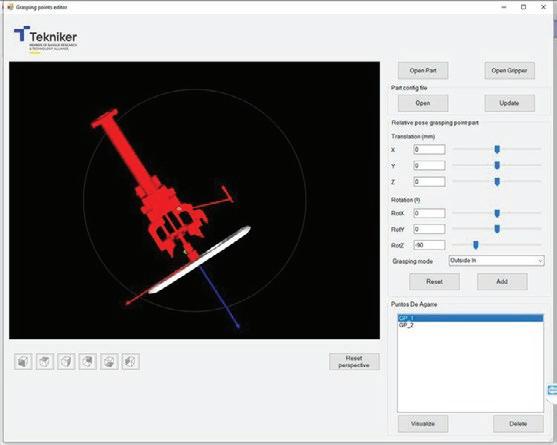
Precizno pozicioniranje neuređenih komponenti pomoću softvera Halcon
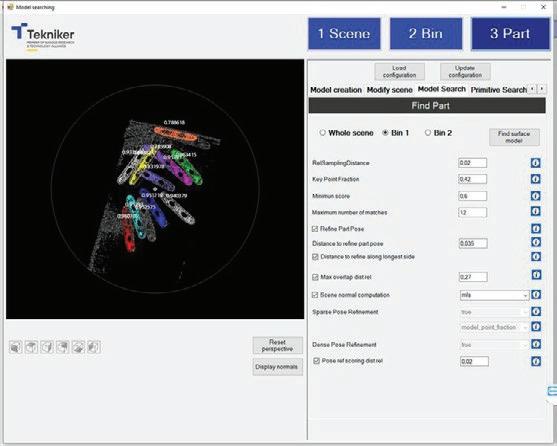
Poseban izazov u ovoj postavci je potreba da roboti precizno prepoznaju položaj i orijentaciju komponenti u 3D prostoru kako bi mogli da ih pokupe i bezbedno polože. Za ovaj zahtev, Tekniker je razvio softver Smartpicking i integrisao ga u celokupno rešenje. Softver može precizno da identifikuje objekte analizom 3D podataka i korišćenjem površinskih modela i povezanih geometrijskih informacija. U srcu rešenja Smartpicking je softver Halcon kompanije MV Tec za mašinski vid, koji pruža napredne algoritme i alate za precizno pozicioniranje proizvoda koji neuređeno leže na pokretnoj traci i prenosi koordinate tačaka sakupljanja robotima, objašnjava Jorge Molina, istraživač u odeljenju za pametne i autonomne sisteme u kompaniji Tekniker.
U stvari, ovo rešenje koristi klasične metode obrade 3D slike, koje prvenstveno uključuju elemente prepoznavanja na osnovu površinskog podudaranja koji su integrisani u softver Halcon. Ova tehnologija koristi podatke iz 3D oblaka tačaka snimljenih 3D skenerom. Podaci se dalje obrađuju korišćenjem različitih filtera i operacija predobrade kako bi se poboljšala procena položaja komponenti, što omogućava posebno robusno pozicioniranje predmeta, bez obzira na njihovu površinu. To omogućava robotima da identifikuju komponente i njihov tačan položaj i bez greške ih prihvate, što funkcioniše za širok spektar različitih komponenti koje se pojavljuju u industrijskim proizvodnim procesima. Pouzdano pozicioniranje je tako obezbeđeno čak i za deformisane i glatke površine bez izraženih ivica, koje ne pokazuju nikakve značajnije razlike u sivim tonovima na konvencionalnim slikama. Pored toga, za siguran proces hvatanja robota mora se precizno odrediti relativni položaj 3D kamere u odnosu na svaki objekat u oba koordinatna sistema. U tu svrhu potrebna je takozvana kalibracija ruka-oko, koja se vrši pomoću softvera Halcon iz MV Teca, na primer s pripadajućom kalibracionom pločom. Ova kalibracija je ključna za uspostavljanje veze između kamere, robota i proizvoda koje treba prihvatiti, kao što je, na primer, mesto na koje robot treba da se pomakne da ne bi u nešto udario.
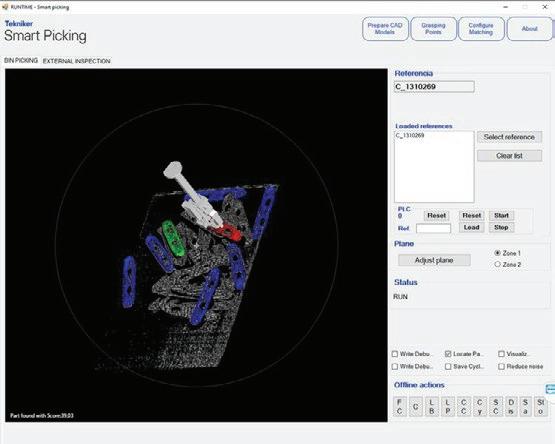
Sprečavanje sudara tokom procesa sakupljanja i odlaganja
Pored otkrivanja i određivanja položaja proizvoda koji treba prikupiti, tokom čitavog procesa sakupljanja i odlaganja moraju se izbegavati mogući sudari između robotske ruke i pojedinačnih predmeta kao što su proizvodi, kontejneri i slično. To je obezbeđeno tehnologijom obrade 3D objekata ugrađenom u softver Halcon, koja omogućava određivanje proizvoda koji su najpogodnije postavljeni na tekućoj traci i mogu se pokupiti bez sudara. Na osnovu ovog početnog izbora, softver određuje optimalne koordinate koristeći različite kriterijume odlučivanja, kao što su visina i orijentacija proizvoda ili položaj tačke prihvatanja, i koordinate o položaja prenosi robotu. Na taj način robot može bezbedno da izvrši sledeće prihvatanje. Kontrolisani redosled omogućava da se komponente uklone na takav način da se pouzdano izbegnu sudari i poremećaji u toku rada. Pored toga, softver takođe precizno izračunava slobodni kapacitet skladišta za odlaganje, pri čemu precizno izračunava njegovu zapreminu. Pritom mogu da se koriste unapred definisane granične vrednosti za određivanje koliko komponenti može da se položi u skladište.
Povećana brzina procesa do 100 posto
Robusne mogućnosti mašinskog vida u softveru Halcon kompanije MV Tec omogućavaju sveobuhvatnu automatizaciju i optimizaciju procesa paletizacije. Softver nudi veliki broj naprednih alata mašinskog vida koji se koriste za precizno lociranje proizvoda za sakupljanje. Time se osigurava bezbedan i besprekoran proces prikupljanja i odlaganja. Pored toga, mogu se izbeći sudari ruke za hvatanje i na taj način osigura bezbedno i kontinuirano automatizovano paletiziranje, zaključuje Jorge Molina. Korišćenjem ovog automatizovanog sistema za prikupljanje i odlaganje u grupaciji Cikautxo može da se poveća brzina procesa do 100 posto, što poboljšava produktivnost. Pored toga, zaposleni mogu da se oslobode rutinskih zadataka, potvrđuje Kepa Laka.








