2 minute read
Acción e control proporcional

by frias3

Para la comprensión de este sistema de control de nivel, se toma como ejemplo un sensor de nivel; posee un recipiente cerrado, donde la posición del flotador que sensa el nivel directamente fija la posición del vástago de una válvula de control cómo se puede muestra en la figura siguiente:
Por tanto si el líquido se incrementa la válvula abre proporcionalmente. A pesar de que el accionamiento es totalmente mecánico, esto es un sistema de control proporcional que ayudará a regular el nivel del líquido dentro del proceso o recipiente. Si un operador deseara cambiar el setpoint de este sistema de control de nivel, tendría que ajustar el acople Entre el flotador y el vástago de la válvula para tener más o menos distancia entre los dos. Así que, incrementando la distancia tendríamos un mayor setpoint, y se disminuye la distancia tendríamos un menor un menor setpoint.
Advertisement
Por tanto, se puede generalizar la acción proporcional de este mecanismo para describir cualquier forma de controlador donde la salida es una función directa de la variable proceso (PV) y el setpoint (SP):
Donde: m = Salida del controlador e = Error (diferencia entre PV y SP) Kp = ganancia proporcional
m = Kp*e + b
B = bias
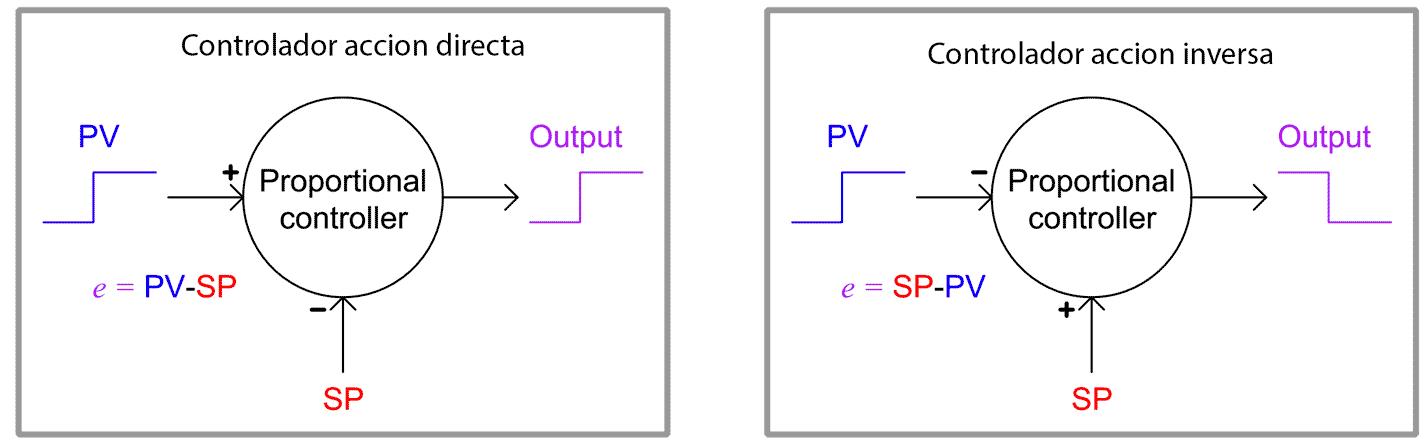
Un nuevo término se presenta en la ecuación anterior “e”, El error o la diferencia entre la variable proceso y el setpoint. El error puede ser calculado como SP-PV o PV-SP, dependiendo si el controlador debe producir una acción de incremento en la señal de salida en respuesta a un incremento en la variable de proceso (acción “directa”), o disminuir la señal de la salida en respuesta a un incremento en la variable de proceso (acción “inversa”): m = Kp*(PV-SP) + b (controlador proporcional de acción directa) m = Kp*(SP-PV) + b (controlador proporcional de acción inversa)
Cuando el controlador es de acción directa o acción inversa, se refiriendo a la reacción que va a tener la variable de proceso (PV), lo cual la señal de salida de un controlador de acción directa van en la misma dirección que la señal de PV y la salida de un controlador de acción inversa van en dirección contraria a la dirección de la señal PV.
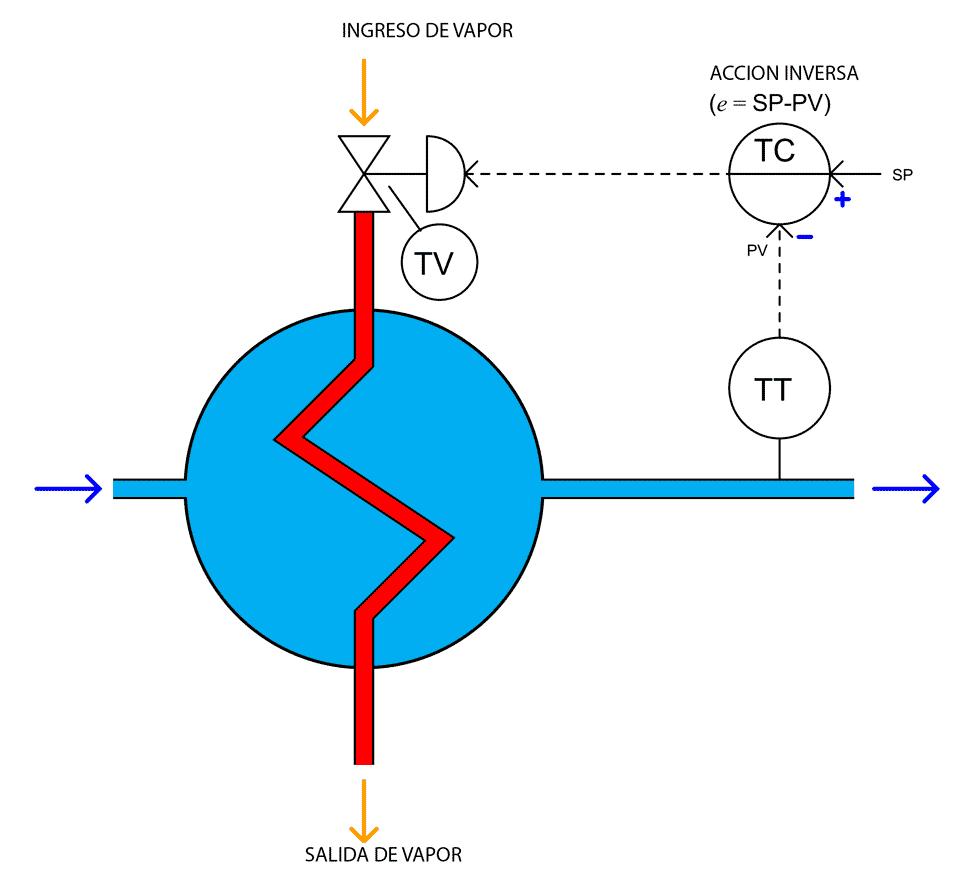
La dirección de la acción requerida de un controlador está determinada por la naturaleza del proceso, del transmisor y del elemento final de control. En el caso del controlador de nivel mecánico del ejemplo anterior mencionado; la acción necesita ser directa dado que si se incrementa el nivel del líquido se necesitará abrir más la válvula de control justamente para drenar más rápido el recipiente. En el caso un intercambiador de calor, puede descirse que un incremento en la señal de salida hacia la válvula de control resulta en un incremento de flujo de vapor, y consecuentemente una temperatura más alta del fluido de proceso, entonces el controlador necesita ser de acción inversa. Por ejemplo, un incremento en la temperatura debe resultar en un decremento en la señal de salida (menos vapor) para controlarla, el error se calcula como SP-PV.