MARCELOJULIOPROCESOSALINTRODUCCIÓNCONTROLDEELIASNORMEY-RICOMENEZESMORATO SBA PRESS


JulioEliasNormey-Rico MarceloMenezesMorato Introducci´onalcontroldeprocesos
Introducci´onalcontroldeprocesos © 2022JulioEliasNormey-RicoyMarceloMenezesMorato EditoraEdgardBlucherLtda. Publisher EdgardBl¨ucher Editor EduardoBl¨ucher Coordena¸c˜aoeditorial JonatasEliakim Produ¸c˜aoeditorial B´arbaraWaida Diagrama¸c˜ao Autores Capa LeandroCunha Imagemdacapa iStockphoto EditoraBlucher RuaPedrosoAlvarenga,1245,4º andar CEP04531-934–S˜aoPaulo–SP–Brasil Tel.:55113078-5366 contato@blucher.com.br www.blucher.com.br ´ Eproibidaareprodu¸c˜aototalouparcialporquaisquermeiossemautoriza¸c˜aoescrita daeditora.TodososdireitosreservadospelaEditoraEdgardBl¨ucherLtda. Datosdecatalogaci´oninternacionalenpublicaci´on(CIP) Ang´elicaIlacquaCRB-8/7057 Normey-Rico,JulioElias Introducci´onalcontroldeprocesos/JulioEliasNormey-Rico,MarceloMenezes Morato.–S˜aoPaulo:Blucher,2022. 728p.:il.(Recopilaci´onSBAPress) Bibliograf´ıa ISBN978-65-5506-482-7(impreso) ISBN978-65-5506-478-0(electr´onico) T´ıtulooriginal:Introdu¸c˜aoaocontroledeprocessos 1.ControldeprocesosI.TituloII.Morato,MarceloMenezesIII.Serie 22-2852CDD681.7 Laspuntuacionesdecat´alogosistem´atico: 1.Controldeprocesos
Contenido 1.Introducci´on19 IProcesosysistemas23 2.Procesos25 2.1.Introducci´on........................... 25 2.1.1.Diagramadebloques.................. 29 2.2.¿Controldeprocesos?...................... 33 2.3.Comprendiendoelcontroldeprocesos............. 36 2.3.1.Ejemplosdeprocesosysusvariables......... 40 2.3.2.Procesosmonovariablesymultivariables....... 44 2.3.3.Sistemasdecontrolenlazocerradomanualyautom´atico 45 2.4.Comentariosfinales....................... 51 2.5.Lecturacomplementaria.................... 52 3.Se˜nalesysistemas57 3.1.Se˜nales,sistemasymodelos.................. 57 3.2.Modelosydiagramas...................... 64 3.3.Se˜nales:representaci´onyuso.................. 70 3.3.1.Se˜naltipoescal´on.................... 73 3.3.2.Se˜naltiporampa.................... 74 3.3.3.Se˜nalimpulsounitario................. 78
12Introducci´onalcontroldeprocesos 3.3.4.Se˜nalessinusoidales................... 80 3.3.5.Se˜naldepotenciaci´ondiscreta............. 80 3.3.6.Se˜nalexponencial.................... 81 3.4.Se˜nales:energ´ıa......................... 85 3.5.Se˜nales:operacionesytransformaciones............ 88 3.5.1.Muestreo........................ 90 3.5.2.Interpolaci´on...................... 93 3.5.3.Procesamientodigital.................. 96 3.6.Comentariosfinales....................... 99 3.7.Lecturacomplementaria.................... 100 4.Propiedadesdesistemas105 4.1.Clasificaci´ondesistemas.................... 105 4.2.Sistemascontinuosydiscretos................. 106 4.3.Sistemascausalesynocausales................ 109 4.4.Sistemasinvariantesyvarianteseneltiempo......... 111 4.5.Sistemaslineales........................ 116 4.6.Estabilidaddesistemas..................... 124 4.7.Comentariosfinales....................... 133 4.8.Lecturacomplementaria.................... 133 IIModelosyrespuestaseneltiempo139 5.Modelado141 5.1.Principiosb´asicosdelmodelado................ 141 5.2.Ejemplosdemodeladodeprocesoscontinuos......... 144 5.3.Ejemplosdemodeladodesistemasdiscretos......... 151 5.4.An´alisisdeprocesos:modelosest´aticosydin´amicos..... 155 5.4.1.R´egimentransitorioyr´egimenpermanente...... 167 5.5.Simulaci´ondeprocesos..................... 168
Contenido13 5.6.Ajustedemodelosapartirdedatosexperimentales..... 175 5.7.Modeloslinealesaproximadosdesistemasnolineales.... 178 5.7.1.Unejemplomotivador................. 179 5.7.2.Aproximaci´ondeTaylordeprimerordenparamodelosdin´amicos...................... 190 5.7.3.Casodiscreto...................... 192 5.8.Comentariosfinales....................... 197 5.9.Lecturacomplementaria.................... 197 6.Respuestaeneltiempodesistemaslinealesdeprimerorden215 6.1.Abordajeintuitivo....................... 215 6.2.Sistemascontinuos....................... 226 6.2.1.Ecuaci´ondiferencialordinaria............. 226 6.2.2.Soluci´ondelaEDO:Casosestableeinestable.... 227 6.2.3.Soluci´ondelaEDO:casointegrador......... 236 6.3.Sistemasdiscretos........................ 238 6.3.1.Soluci´ondelaED.................... 239 6.3.2.An´alisisdelasoluci´ondelaED:casosestable,inestableeintegrador.................... 242 6.4.Respuestadelossistemasmuestreados............ 246 6.5.Comentariosfinales....................... 260 6.6.Lecturacomplementaria.................... 261 7.Cerrandoellazo:controlporrealimentaci´ondesalida273 7.1.Losobjetivosdelcontroldeprocesos............. 273 7.2.Lossistemasdecontrol(enelnivel1)............. 280 7.3.Controldelazoabiertoylazocerrado............. 283 7.3.1.Requisitosdeoperaci´on................ 288 7.3.2.Modelosaproximadosconretardo........... 297 7.3.3.Aspectospr´acticos................... 304 7.4.Estrategiascl´asicasdecontrolenlazocerrado........ 306
14Introducci´onalcontroldeprocesos 7.5.Comentariosfinales....................... 307 7.6.Lecturacomplementaria.................... 307 IIIControldeprocesos321 8.Control on-off 323 8.1.Ideab´asica............................ 323 8.2.Implementaci´on......................... 327 8.2.1.Procesoscongananciapositiva............ 328 8.2.2.Procesosconganancianegativa............ 329 8.2.3.Implementaci´onpr´acticaconrel´es........... 329 8.2.4.Control on-off conrel´es................ 331 8.3.Respuestaderegulaci´on on-off 334 8.3.1.Casocontinuo...................... 334 8.3.2.Casodiscreto...................... 343 8.4.An´alisisdecasosconperturbaciones............. 345 8.5.Comentariosfinales....................... 351 9.Controlproporcional(P)369 9.1.Ideab´asica............................ 369 9.2.Implementaci´ondelcontrolproporcional........... 371 9.2.1.Implementaci´onelectr´onicaanal´ogicaydigital.... 376 9.3.Algunosejemplosintuitivos.................. 378 9.4.Lasoluci´onenlazocerrado:plantasestables.......... 382 9.4.1.Casocontinuo...................... 383 9.4.2.Casodiscreto...................... 386 9.5.Procesosinestableseintegradores............... 397 9.5.1.Procesoscontinuosinestables............. 397 9.5.2.Procesoscontinuosintegradores............ 398 9.5.3.Procesosdiscretos.................... 399
Contenido15 9.6.ElsignoBIAS.......................... 403 9.6.1.Controldetanquepulm´on............... 410 9.6.2.BIASautom´atico.................... 416 9.7.Comentariosfinales....................... 419 10.Controlproporcional-integral(PI)437 10.1.Ideab´asica............................ 437 10.2.Acci´onintegral:unejemplomotivador............ 438 10.3.Controlintegral......................... 445 10.3.1.Controlintegralyr´egimenpermanente........ 446 10.3.2.Ajustedelcontrolintegralyr´egimentransitorio... 450 10.3.3.Controlproporcional-integral:sumaponderadadeacciones.......................... 454 10.3.4.Laacci´onI:¿unBIASautom´atico?.......... 458 10.4.Implementaci´ondelcontrolPI................. 461 10.4.1.Implementaci´onanal´ogica............... 462 10.4.2.Implementaci´ondigital................. 466 10.5.Ajustedelcontroladorproporcional-integral......... 472 10.5.1.Ajustesb´asicosparaprocesossinretardo....... 474 10.5.2.M´etododeajustedeZiegler-Nichols.......... 477 10.5.3.M´etododeajustedeSkogestad............ 478 10.6.Comentariosfinales....................... 480 11.ControlPI:aspectospr´acticos499 11.1.Estudiodecaso:pilotoautom´aticodeunautom´ovilparacontrolarlavelocidad........................ 499 11.2.Estudiodecaso:controldeunfermentadordeetanol.... 504 11.3.ControlPIconponderaci´ondelareferencia......... 509 11.4.Modosdefuncionamiento:manualyautom´atico....... 516 11.5.ControlPIconsaturaci´ondeacci´ondecontrol........ 518 11.5.1.Elefectodelaacumulaci´ondelaacci´onintegral... 520
16Introducci´onalcontroldeprocesos 11.5.2. Anti-windup digital................... 527 11.5.3. Anti-windup anal´ogico................. 533 11.6.Comentariosfinales....................... 536 12.Controlproporcional-integral-derivativo(PID)555 12.1.Laacci´onderivativa:prediciendoelfuturo.......... 556 12.2.ControladoresPIDysusconfiguraciones........... 560 12.3.Sintonizaci´ondecontroladoresPID.............. 571 12.3.1.M´etododeajustedeZiegler-Nicholsdelazoabierto. 571 12.3.2.M´etododeajustedeZiegler-Nicholsdelazocerrado. 574 12.3.3.M´etododeajustePID-IMC.............. 577 12.4.Implementaci´ondecontroladoresPID............. 580 12.4.1.Implementaci´onanal´ogicadecontroladoresPID... 580 12.4.2.Implementaci´ondigitaldecontroladoresPID..... 583 12.5.Medici´onruidosa........................ 585 12.5.1.Elefectodelruidoenlamedici´on........... 587 12.5.2.Filtrodemedici´on................... 593 12.5.3.Implementaci´ondefiltrodemedici´on......... 600 12.5.4.ElusodefiltrosderuidoenelcontrolPID...... 603 12.6.Controlanticipativo....................... 605 12.7.Comentariosfinales....................... 616 13.Controlavanzado:conceptosb´asicosdeoptimizaci´onyrobustez635 13.1.Planificaci´ondelprocesodeproducci´on............ 635 13.2.Optimizaci´on.......................... 637 13.3.Incertidumbreenelmodelado................. 644 13.3.1.Controlproporcionalrobusto............. 649 13.3.2.Robustezdelaacci´onintegral............. 653 13.4.Controllinealdepar´ametrosvariables(LPV)......... 657 13.5.Comentariosfinales....................... 661 13.6.Lecturacomplementaria.................... 662
Contenido17 A.Problemasysoluciones669 A.1.Problema1........................... 669 A.1.1.Resoluci´on........................ 670 A.2.Problema2........................... 674 A.2.1.Resoluci´on........................ 676 A.3.Problema3........................... 679 A.3.1.Resoluci´on........................ 681 A.4.Problema4........................... 685 A.4.1.Resoluci´on........................ 687 A.5.Problema5........................... 691 A.5.1.Resoluci´on........................ 693 B.Kitexperimental:controldevelocidaddeunmotordeCC699 B.1.Kitexperimental........................ 699 B.2.Modulaci´onPWM....................... 701 B.3.Circuitoelectr´onico....................... 704 B.4.Tutorialdecomunicaci´onconArduino............ 706 C.Simuladoresdeprocesos709 Listadefiguras713
Estelibrotienecomoobjetivoprincipalpresentaralosestudiantesdeingenier´ıa(yde´areasafines)algunosproblemasdecontrolsimplesnormalmente encontradosenlaindustriadeprocesos,comotambi´enmuchasdelassolucionesimplementadaspararesolverlosenlapr´actica.
Alolargodeltexto,losconceptosb´asicosdeControldeProcesosser´an detallados,abordandolasprincipalesmetodolog´ıasb´asicasdecontrolrealimentadoytambi´enalgunoscasosdondeseaplicarant´ecnicasdecontrol avanzado.
Ellibrotambi´enabordaaspectost´ecnicosdelosprocesosindustrialesde producci´on,talescomocuestionesrelacionadasalossistemasdemedici´on, deactuaci´onydecontrol.Paratal,diversoscasosrealessonusadospara motivaryembazarlasherramientasdecontrolysusrespectivosdesarrollos matem´aticos.Algunosejemplospr´acticosvistosalolargodeestelibroprovienendelaindustriadelaca˜nadeaz´ucar,desistemasdeenerg´ıasolar,del sectordeveh´ıculosaut´onomosydelaindustriadepetroleoygas,temasde granimportanciasocio-econ´omica.
Cap´ıtulo1
Esimportanteresaltarquetododesarrollote´oricopresentadoeneste librosigueunabordajeintuitiva,queutilizaconceptosyherramientasb´asicasdelaf´ısicaydelc´alculo.Ellibroesorientadoparaestudiantesde
Introducci´on
ingenier´ıaqueposeenconocimientosb´asicosdematem´atica(comofunciones,derivadas,integrales,ecuacionesdiferencialesordinariasyseries)yde f´ısica(mec´anica,termodin´amica,hidr´aulicayleyesdeconservaci´on),peronosonnecesariosconocimientosdetransformadasdeLaplaceoFourier. Elmaterialdisponibleenestelibrotambi´enpuedeserutilizadoencursos t´ecnicosdeingenier´ıadecontrolyautomatizaci´onyen´areasafines.
20Introducci´onalcontroldeprocesos
LosCap´ıtulos2y3introducenlosprimerosconceptossobreprocesos f´ısicos,se˜nalesysistemas.Lasdefinicionesdeactuaci´on,medici´on,variabledecontrolydeproceso,talcomolosconceptosdeinterpolaci´on ymuestreo,sonpresentadosyejemplificadosconcasospr´acticos.
Estelibroest´aorganizadodelasiguienteforma:
Estelibrotambi´enpresentauntutorialparaelmontajedeunprototipo paraensayosexperimentalesdet´ecnicasdecontrol.Esteprototipoutiliza unmotor-generadordecorrientecontinua,cuyavelocidadescontroladapor mediodeunase˜naldetensi´onaccionadaporunmicrocontroladorArduino. Conelprototipo,diversosconceptoste´oricosym´etodosdecontrolpueden serprobados.
Lostemasyapartadosdecadacap´ıtulosondivididosentemasb´asicosy avanzados.Lostemasavanzados(marcadosenazul)utilizanunamatem´aticamascomplejaytienenmayorrigoryformalismosenlasdemostraciones. Loslectoresylectorasquenodeseenestudiarlostemasavanzadospueden continuarlalecturasalt´andolos,sinperdercontinuidadeneldesarrollode lasideas.
LosCap´ıtulos4,5y6presentanlasherramientasmatem´aticaspara an´alisisdesistemasf´ısicosycomoestospuedenserrepresentadosa trav´esdeEcuacionesDiferencialesoEcuacionesenDiferencias.EnestosCap´ıtulos,losconceptosdelinealidad,linealizaci´onypropiedades generalesdesistemassondiscutidos,siempreusandoejemplosintuitivos.
Cap´ıtulo2 Procesos Elasuntoprincipaldeestelibroeselcontroldeprocesos,´areadeestudio degranimportanteenelcontextodelaingenier´ıa.Parapoderavanzaren elestudiodelosproblemasasociadosalcontroldeprocesos,esnecesario, primeramente,presentarlosconceptosb´asicosdesistemasyrespondera preguntascomo: ¿Qu´eesyc´omosedefineunprocesoenlaingenier´ıadecontrol? ¿Cu´alessonlasetapasdelproyectodeunsistemadecontroldeun proceso? Pararesponderaestaspreguntas,enestecap´ıtuloestudiamoselfuncionamientodeprocesoseintroducimosalgunasdefinicionesyconceptos importantesparasuentendimiento,como,porejemplo,loquesonvariables decontrol,variablescontroladas,perturbaciones,etc. 2.1.Introducci´on Definici´on1 Proceso Enelcontextodelaingenier´ıa,un proceso esdefinidocomounsistema
quetransformaomodificalaspropiedadesf´ısicas,qu´ımicasobiol´ogicasde unmaterialoelemento,pudiendoconvertirloenunnuevoproducto.
LaFigura2.1ilustraunprocesosimpledenuestrod´ıaad´ıa:el actodecalentaraguaenunacocinaagas.Enesteproceso,almanipular oregularlacantidaddecalorqueseproduceenelquemadorconseguimos modificarunapropiedadf´ısica(enestecasolatemperatura)delamateria prima(queparaesteejemploser´ıaelagua).Senota,emp´ıricamente,una relaci´oncausa-efecto;latemperaturadelaguaaumentar´aconformelacantidaddecalorentregadaporelquemador.Observamos,generalmente,que lavariaci´ondelapropiedadf´ısicadelmaterialesunafunci´ondelaintensidaddeactuaci´onsobreelprocesoqueproduceesematerial.Enesteproceso estamosusandolaenerg´ıaproducidaporlacombusti´ondelgas(queesuna reacci´onqu´ımica)paracambiarlatemperaturadelagua.
Apesardelosejemplosanterioresserde´areasdiferentes,desdeelpunto devistadelentendimientodelconceptodeprocesos,ellostienenvariascaracter´ısticasencom´un.Laprimeraesqueexisteunarelaci´oncausaefecto entreunamanipulaci´onrealizadasobreelproceso(quem´astardedefiniremoscomovariablemanipuladadelproceso)ylapropiedaddelmaterialque seest´aproduciendoodeunacaracter´ısticadelprocesoquesedeseamodificar(quedefiniremosenlaspr´oximasseccionescomovariablecontrolada
Ejemplo1
Otroejemplodeunprocesosimple,eslavariaci´ondelavelocidaddelasaspasdeunventiladorcuandoaccionamosunpotenci´ometroque modificalapotenciael´ectricadelaparato(ilustradoenlaFigura2.2).En estecaso,tenemosunprocesoenelcuallaenerg´ıael´ectricaestransformada enenerg´ıamec´anica.Alaumentarlapotenciael´ectricaaplicadaseconsigue quelasaspasdelventiladorsemuevanamayorvelocidad.
26Introducci´onalcontroldeprocesos
Variaspeque˜nastareascotidianassonejemplosdeprocesossimples.A continuaci´onser´anpresentadosalgunosdeestosejemplos.
Ejemplo2
Enelcap´ıtuloanterior,presentamosalgunosconceptosb´asicossobreelcontroldeprocesos,as´ıcomodefinicionesdelost´erminosb´asicosutilizados, siempreconunenfoqueintuitivoysinelrigormatem´aticonecesariopara poderseguirdesarrollandolassoluciones.Enestecap´ıtulocomenzaremos presentandolasdefinicionesyformulacionesmatem´aticasutilizadasenel ´areaparadescribirelfuncionamientodelosprocesos.Losconceptosb´asicos dese˜nalydesistema,as´ıcomolaspropiedadesf´ısico-matem´aticasrelacionadasaellosser´anpresentadosalolargodelcap´ıtulo. 3.1.Se˜nales,sistemasymodelos
Comovimosenelcap´ıtuloanterior,enlaingenier´ıadecontrolnecesitamosrepresentarlosprocesosdeformasimple,talqueestarepresentaci´on nospermitaentenderdeformacorrectacomoqueelprocesofunciona.Al mismotiempo,necesitamosrelacionarelproceso(opartede´el)conotros procesos(uotraspartesde´el).Dosdefinicionessonmuyimportantespara iniciarlaformalizaci´ondeestasideasyparaquepodamostenerunametodolog´ıageneral,aplicableacualquiercasodeestudio:lasdefinicionesde se˜nalesysistemas.
Se˜nalesysistemas
Cap´ıtulo3
58Introducci´onalcontroldeprocesos
Definici´on2 Unase˜nalesladescripci´oncuantitativadeunciertofen´omenoasociado conundeterminadomedio. ejemplo,latemperaturam´aximadecadad´ıadela˜noenFlorian´opolispuede considerarseunase˜nalasociadaalentornodelaciudad.Cuandosecoloca paracadad´ıadela˜no,estamosrepresentandoelfen´omenof´ısicocomouna
deformacuantitativa,esdecir,cuandosedefineunvalordetemperatura
Otroejemplomuysimpleycotidianoeslavelocidadinstant´aneadeun autom´ovil,mostradaporelindicadordevelocidadeneltablero(veloc´ımetro).Estainformaci´onmostradaenelveloc´ımetroesunase˜nalquecuantifica elestadodefuncionamientodelautom´ovil(o,podr´ıamosdecir,delsistema delautom´ovil).
Formalizamos,entonces,elconceptodesistema: Definici´on3 Sistema Sedefinecomosistemaunapartedeunmedioambientequecon´elsecomunicaatrav´esdeyapartirdese˜nales.
Se˜nal
se˜nal.
Ennuestravidadiaria,estamoslidiandoconse˜nalestodoeltiempo.Por
Estaesunadefinici´onabstractaygeneraldeloqueesunsistema,aunquenospermiteexplicarbienlaideaquehemospresentadoatrav´esdel ejemploanterior:el“sistemaautom´ovil”secomunicaconelmedioatrav´es
TEnero =[22, 23, 27, 31, 26,..., 27],
Podr´ıamos,porejemplo,escribirunvectordetreintayunelementos, siendoqueestevectorestarepresentadopor: querepresentalastemperaturasm´aximasobservadaseneneroenlaciudaddeFlorian´opolis,paralocualcadaelementorepresentalatemperatura m´aximadiaria,del1al31deestemes.
Cap´ıtulo4 Propiedadesdesistemas Enelcap´ıtuloanteriorpresentamoslasdefinicionesdese˜nalysistema,donde fueronanalizadaslaspropiedadesyoperacionesdealgunostiposdese˜nales importantes.Enestecap´ıtulo,estudiaremoslaspropiedadesf´ısicasymatem´aticasdelossistemas,clasific´andolosseg´unsuspropiedades,talescomo linealidad,causalidad,etc.. 4.1.Clasificaci´ondesistemas Paraelestudiodelateor´ıadelossistemasdecontrolesmuyconveniente queestosseclasifiquenseg´unalgunasdelaspropiedadesf´ısico-matem´aticas desusmodelos. Unavezclasificadoslossistemasseg´unsuspropiedades,diferentesprocesosdelasm´asdiversas´areasdelaingenier´ıasepuedenagruparenfunci´on deunconjuntodepropiedadescomunes.Estopermitededucircaracter´ısticas(est´aticasodin´amicas)delcomportamientodeunaclasedesistemas, simplificandoofacilitandoelestudiodevarioscasospr´acticos. Enestelibrodescribiremoslosdistintossistemas,atrav´esdelestudiode susmodelos,considerando: (A) eldominioenelqueest´andefinidos(sistemascontinuosodiscretos),
Enelcap´ıtuloanteriordefinimosyclasificamosse˜nalesporsudominio, considerandocomose˜nalescontinuasaaquellasquepuedenserrepresentadascomofuncionesdetiempoeneldominiorealyse˜nalesdiscretasaaquellasdefinidaseneldominiodelosn´umerosnaturalesom´ultiplosenterosy positivosdeuntiempodemuestreo.Cuandorepresentamosunsistemapor sumodelo,estamosconsiderandolasrelacionesest´aticasydin´amicasentre susse˜nalesdeentradaysalida,porlotanto,lasecuacionesquelorepresentanestar´andefinidasenelmismodominioquesusse˜nales.Estonospermite definirunsistemacomocontinuoodiscreto.
106Introducci´onalcontroldeprocesos (B) lacausalidadenlasrelacionesentresusentradasysalidas(sistemas causalesonocausales), (C) elmantenimientodesuscaracter´ısticaseneltiempo(sistemasinvarianteseneltiempoosistemasvarianteseneltiempo), (D) laformaenquelasentradasysalidasest´anrelacionadas(sistemas linealesonolineales), (E) laformadesucomportamientodin´amico(sistemasestablesoinestables). Acontinuaci´on,sedetallayejemplificacadaunadeestascategor´ıas.
Definici´on9 Sistemacontinuo/discreto Unsistemasedefinecomocontinuo(discreto)cuandolasse˜nalesasociadas conelsistemasonse˜nalescontinuas(discretas).
4.2.Sistemascontinuosydiscretos
Comoconsecuenciadeestadefinici´on,unsistemacontinuo(discreto) estar´arepresentadoporunmodelocontinuo(discreto),esdecir,unconjunto deecuacionesentiempocontinuo(discreto)querelacionansusvariablesde proceso,manipuladasyperturbaciones.
Cap´ıtulo5
Elprincipalobjetivodeunmodeloesqueseacapazderepresentar(matem´aticamente)elcomportamientodeunprocesoreal.Portanto,unmodelo debedescribirc´omoserelacionanlasvariablesmanipuladas,lasvariables deprocesoylasperturbaciones.Alolargodeestelibro,usaremosmodelos
Modelado
Comoseexplic´oenloscap´ıtulosanteriores,larepresentaci´onmatem´atica delosprocesosesdefundamentalimportanciaparaquepodamosrealizarel an´alisissobresucomportamientoydise˜narsistemasdecontrolquepuedan adaptarsufuncionamientoalosrequerimientosoperacionales.Envarios ejemplosyapresentadosalolargodeestelibro,hemosmodeladoalgunos procesossimples.Enestecap´ıtulo,estudiaremosconmasprofundidadalgunosaspectosdelmodeladodeprocesosparapoderrealizarunan´alisism´as detalladasdesuscomportamientos.Atrav´esdeejemplosydeestudiosde casosreales,ilustraremosprocesossimplesyotrosmascomplejos.Eneste ´ultimocaso,veremosqueamenudoesnecesarioaproximarelcomportamientodelosprocesosutilizandomodelosm´assimples,demodoquesea posibledise˜narsistemasdecontroladecuadosparausoindustrial. 5.1.Principiosb´asicosdelmodelado
142Introducci´onalcontroldeprocesos deentrada-salida,paraloscualeslasentradasrepresentanvariablesmanipuladasyperturbaciones,mientrasquelassalidasrepresentanlasvariables deproceso. Enotraspalabras,unmodelodebesertalque,alutilizarcomoentradas delmodelose˜nalesquerepresentanlasvariablesmanipuladasyperturbacionesdelprocesoreal,lassalidasdelmodelodebenserse˜nalesquerepresenten bienalasvariablescontroladasdelprocesorealmenteobservadasenelexperimentorealizado.Esprecisamenteenestapropiedaddonderadicala importanciadelosmodelosparalaingenier´ıa:conellospodemosestudiar elcomportamientodeprocesosendiferentessituacionessinlanecesidadde realizarexperimentoscostososocomplejosenelprocesoreal. Ejemplo42 Considereunprocesodecontroldetemperaturaenunambiente,conuncalentadorel´ectricoconpotenciam´axima Pm.Latemperatura ambiente T eslavariabledelproceso,mientrasquelavariablemanipuladaeslaposici´ondelaperillaqueregulalapotenciadelcalentador.Enun experimentorealizadocontemperaturainicial T0 ytemperaturaexterna Te constanteeiguala T0,seaument´olapotenciade 0 hastasuvalorm´aximo Pm yseregistr´olatemperaturaenunterm´ometroinstaladoenlasala.La temperaturaambienteaument´oconeltiempoypuededescribirsecomouna se˜naldetiempocontinua T (t).Consideremosqueseconstruy´ounmodelo matem´aticodeestesistemapararelacionarlasalida T conlasentradas: potencia P ytemperaturaexterna Te.Estemodelodebesertalque,sisus entradassedefinencomolasdelproceso,esdecir,latemperatura Te = T0 y P (t) comounescal´ondeamplitud Pm,laevoluci´ondelasalidadelmodelo debeestarmuycercadelaevoluci´ondelatemperaturareal T (t) observada enelterm´ometro. Debemosenfatizarque,alolargodelahistoria,fueesteconceptode modelorepresentativoelquegui´oatodoslosfamososcient´ıficosf´ısicosy matem´aticosaestablecerlasleyesdecomportamientodeluniversoreal,comolasleyesdeNewton,lasecuacionesdeMaxwell,laleydeFaraday,etc.
Enestecap´ıtulo,presentaremoslasherramientasmatem´aticasparacalcular lasrespuestastemporalesdesistemaslinealesdeprimerorden,tantoenel casocontinuocomoenelcasodiscreto.
Antesdeldesarrolloformaldelarespuestatemporaldelossistemas linealesdeprimerorden,estudiaremos,intuitivamente,larespuestadedos
Comosemencion´oenloscap´ıtulosanteriores,muchosprocesossepuedenrepresentarmediantemodeloslineales(continuosodiscretos)envarias situacionesquesonbastantecomunesenlapr´actica.Adem´as,losprocesosconmodelosnolinealespuedenaproximarsemediantemodeloslineales cuandotrabajanenlascercan´ıasdeunpuntodeoperaci´on.
Cap´ıtulo6 Respuestaeneltiempode sistemaslinealesdeprimerorden
Enestelibroconsideraremossolomodelosdeprimerorden,tantodiscretoscomocontinuos.Noslimitaremosaestoscasos,porque,desdeunpunto devistaconceptual,podemos,discutirvariosdelosproblemasdelateor´ıa delcontroldeprocesos,sinnecesidaddematem´aticasavanzadas. 6.1.Abordajeintuitivo
216Introducci´onalcontroldeprocesos sistemas,unocontinuoyotrodiscreto,ambosestables.Comovimosenlos cap´ıtulosanteriores,elcomportamientodin´amicodemuchossistemasreales puedeseraproximadopormodelosestablesdeprimerorden(niveldeun tanque,temperaturadeunambiente,velocidaddeunautom´ovil,etc.). Empezaremosporelcasocontinuo.Paraello,consideramoselprocesode aceleraci´ondeunautom´ovilpresentadoenelEjemplo45,quecomovimos, usandolasLeyesdeNewton,ladin´amicadelavelocidaddelveh´ıculose puederepresentarmediantelasiguienteecuaci´on: m Ka dv dt (t)+ v(t)= Km Ka u(t), (6.1) suponiendoquelafuerzadefricci´onqueact´uaenelautom´ovilsealinealy proporcionalalavelocidaddelveh´ıculoyquelacarreteraseaplana.Este modelodescribelarelaci´ondelase˜naldevelocidad v(t)conlaacci´ondel conductordelautom´ovil,descriptaporlase˜nal u(t),querepresentalaposici´ondelpedalqueaceleraelautom´ovil(acelerador).Considerando,que0 correspondealpedalsueltoy1alpedalcompletamentepisado.Recordamos que m eslamasadelautom´ovil, Ka laconstanterelacionadaalafricci´on y Km laconstantequerelacionalaactuaci´ondepropulsi´ondelautom´ovil u(t)ysuvelocidad v(t). Consideremos,enunprimerexperimento,queelautom´ovilest´acirculandoenunacarreterarecta,avelocidadconstante v(t)= v.Enestecaso, elaceleradoresta,enposici´onfija,osea u(t)= u esconstante.As´ı,reemplazandoesasse˜nalesenelmodelodelproceso,delaEcuaci´on(6.1), tenemos(dadoqueladerivadade v(t)= v escero): v = Km Ka u . (6.2) LaEcuaci´on(6.2)nosafirmaunapropiedadmuyinteresanteencontradaenlossistemasconmodelosdeltipodelaEcuaci´on(6.1)(quees estable).Cuandoaplicamosunaentradaconstanteoconl´ımiteconstante
Cap´ıtulo7 Cerrandoellazo:controlpor realimentaci´ondesalida Enestecap´ıtulo,comenzaremosaformalizaralgunosdelosconceptosb´asicosdeestrategiasderetroalimentaci´onydesistemasdecontrolenlazo cerrado,quesepresentaronintuitivamenteenelCap´ıtulo2,utilizandolas formulacionesmatem´aticaspresentadasenlosCap´ıtulosdel3al6.Tambi´enanalizaremosaqu´ıalgunosaspectospr´acticossobrelaimplementaci´on desistemasdecontrolypresentaremoslasestrategiasdecontrolqueser´an discutidasendetalleenlossiguientescap´ıtulos. 7.1.Losobjetivosdelcontroldeprocesos ComosevioenelCap´ıtulo2,lossistemasdecontrolsirvenparaactuar enelprocesodetalmaneraquesucomportamientocumplaconlosrequisitosdelusuario.Estudiamosvariosejemplosenaquelcap´ıtulo,deforma intuitiva,mostrandoquealmodificarlavariablemanipuladadeunproceso, podemoscambiarelcomportamientodelavariablecontrolada,demodoque cumplaconalgunaespecificaci´on:controlarlatemperaturadeunambiente, lavelocidaddeunautom´ovil,etc.Ahora,enestecap´ıtuloyenlossiguien-
Comoseveenlafigura,enelnivelm´asbajo(nivel0),tenemoslos sistemasdemedici´on,actuaci´onyhardwarevinculadosalproceso;estos componentesoperanenescalasdetiempor´apidas(delordendesegundoso milisegundos).Enelprimerniveldecontrol,tenemosloscontroladoreslocales1,tambi´enllamadoscontroladoresdebajonivel,queregulanlosprocesos buscandocumplirobjetivosentiemposdelordendeunospocossegundoso minutos.Tambi´enselesllamadecontroladoreslocalesporquesonempleadoslocalmente(enunapartedelaplantaosubsistema)pararesolverun problemadecontrolsinpreocuparseporlosdem´assubsistemas. Estoscontroladoresrecibendelacapasuperior(nivel2)losvaloresde referenciaylascondicionesqueseutilizar´anparamantenerlasvariablesde procesodeesteniveldentrodeciertosrequisitos.Elfocodeestelibroes precisamenteelestudiodeestoscontroladoresdenivelprimario.Enelnivel 1 Tenemos,enlafigura,laindicaci´onqueelnivel1constaprincipalmentedecontroladoresl´ogicosprogramables(PLC)ycontroladoresdetipoPID(estudiadosenelCap´ıtulo 12deestelibro).
Losrequisitosdefuncionamiento(metas)deunprocesopuedenrelacionarseconobjetivosendiferentesescalasdetiempoydevariadacomplejidad.Porlotanto,esinteresantedistribuiryasignarestaspautasadiferentes nivelesdecontrol,correspondientesadiferentesescalasdetiempoycomplejidadesdelosprocesos.
LaFigura7.1presentaunarepresentaci´ondela“Pir´amidedelaautomatizaci´on”.Estapir´amideilustralosdiferentesnivelesdecontroldelossistemasindustriales,considerandolaescalatemporaldelaoperaci´on(tiempo deejecuci´ondelatarea,objetivoorequerimientooperacional)yeln´umero deunidadesdecontrol.Estarepresentaci´onseusaampliamenteenlapr´acticayesmuy´utilparacomprenderlaacci´ondelsistemadecontrolenun procesooplantacompleja,dadoqueestenormalmenteescompuestopor variossubsistemasqueinteract´uan.
274Introducci´onalcontroldeprocesos tes,profundizaremosenesteestudio.Paraello,comenzamosporestudiarel funcionamientodelossistemasdecontrol,demaneram´asgeneral.
Cap´ıtulo8 Control on-off Enestecap´ıtulo,presentamoslaprimeraestrategiadecontrolderetroalimentaci´ondeestelibro,elsistemadecontroltipo on-off.Esteeselm´etodo m´assimpledeentretodoslosm´etodosqueser´anestudiadosenestelibro, as´ıcomounadelasestrategiasm´assimpleimplementadaenlaindustria. Calcularemoslasrespuestasdelossistemascontroladosconestaestrategia, adem´asdeanalizarsuspropiedades,ventajasydesventajas. 8.1.Ideab´asica Elcontrol on-off (tambi´enllamadotodoonada)seusaprincipalmente cuandolasespecificacionesdedise˜nopermitenoscilacionesdelavariable controladaalrededordelvalordereferencia.Estapropiedadfuedefinidaen elcap´ıtuloanteriorcomounaoperaci´onporbandas.Portanto,elcontrol todoonadaesparaprocesoscuyavariablecontroladasepuedemantener dentrodeunabandaoperativasincomprometersufuncionamiento,independientementedelaformadelasvariacionesdeestavariabledentrodela banda. Laideab´asicadelossistemasdecontroldeestetipoeslasiguiente: seposicionaelactuadorensuvalorm´aximoom´ınimodependiendode
Losprocesost´ermicosseregulancom´unmenteconestrategias on-off.A mododeejemplo,podemosilustrarelcontroldelasheladeras,c´amarasfrigor´ıficasyequiposdeaireacondicionado,paralocualeselaccionamientose suelerealizardelasiguientemanera:cuandolatemperaturadelambiente enfriadosuperaunvalorm´aximoaceptable,elequiposeenciende,mientras
quecuandolatemperaturaesmenorquevalorm´ınimoaceptable,elequipo esapagado.Laregi´onoperativadeestaestrategiaest´adefinidaporlosl´ımites(superioreinferior)predefinidosparalavariablecontrolada.LaFigura 8.1representalavariaci´on,alolargodeltiempo,delatemperaturadeun ambientecuyatemperaturaesreguladaporunrefrigeradorbajolaacci´on deuncontrol on-off.Latemperaturaambienteesinicialmenteiguala25 °C, cuandoseenciendeelsistemadecontrol on-off delequipo,paraunabanda de15 °C.Enestecaso,ell´ımiteinferioresdadopor13 °Cyelsuperiorpor 17 °C. Observamosc´omoelsistemadecontrolmantieneencendidoeldispositivoderefrigeraci´onhastaquelatemperaturaalcanzalos13 °C,aproximadamente45minutosdespu´esdeliniciodelexperimento.Luego,cuandoel dispositivoseapaga,latemperaturaaumentanaturalmenteyaproximadamenteenelinstantedetiempoiguala65minutos,alcanzalos17 °C,cuando eldispositivoseenciendenuevamente.Estecicloserepiteindefinidamente. Destacamosqueestatipodecontrol on-off tambi´enseusaenrefrigeradores dom´esticosyhornosel´ectricos.
324Introducci´onalcontroldeprocesos silavariabledeprocesoest´adentroofueradeunabandadeactuaci´on predefinida.
Paraestaestrategiadecontrol,alase˜naldecontrolapenasselepuede asignarlosestadosdeencendidoyapagado,dependiendodelestadodela variablecontrolada,siestaexcedeonolosl´ımitesquedefinenlabanda operativa.Porestemotivo,elelementoactuadoresmuysimple,yaque precisatenerapenasdosposiciones,encendidoopagado,abiertoocerrado, comoporejemplounav´alvulasolenoideounrel´e.
Cap´ıtulo9 Controlproporcional(P) Enestecap´ıtulo,presentaremoslasegundaestrategiadecontrolderetroalimentaci´ondeestelibro,elcontrolproporcional(P).Mostraremosc´omoeste m´etodopuedegarantizarelseguimientodeunareferenciaconstanteconun errorlimitadoeinclusonuloenalgunoscasosparticulares.As´ı,elcontrol proporcionalpermiteresolverelproblemadeoscilaci´ondelavariablede procesoquepresentaelcontrol on-off.Analizaremos,alolargodeestecap´ıtulo,lasrespuestaseneltiempodeprocesosdeprimerorden,linealese invarianteseneltiempo,cuandosecontrolanbajolaacci´ondesistemasde controlproporcional.Tambi´en,mostraremoslasventajasydesventajasde estaestrategia. 9.1.Ideab´asica Elsistemadecontrolproporcionalsebasaenlasiguienteidea:laintensidaddelaacci´ondecontroldisminuyeamedidaquelavariabledelproceso seacercaalase˜naldereferencia,mientrasquesuintensidadaumentaa medidaquelavariabledelprocesosealejadelase˜naldereferencia.Porlo tanto,elaumento/disminuci´ondelvalordelavariablemanipuladasecalculacomounaproporci´ondelerrordeseguimientodereferencia.Elprincipal
370Introducci´onalcontroldeprocesos objetivodeestaestrategiaesasegurarquelavariabledeprocesopermanezca,enelr´egimenpermanente,cercanaoigualalvalordereferenciadeseado, queesunvalorconstante. Portanto,laestrategiaproporcionalusalasiguienteleydecontrolpara procesoscontinuos: u(t)= Kpe(t)= Kp (r(t) y(t)), (9.1) siendo e(t)elerrordeseguimientodelasalida y(t)conrelaci´onalareferencia r(t).Lagananciaest´atica Kp esllamadade“gananciaproporcional”. LaFigura9.1ilustralaimplementaci´ondeestaestrategiadecontrolde retroalimentaci´on.Destacamosqueelbloqueentre e(t)y u(t)representa lagananciaproporcional,convalor Kp,cuyarelaci´onentrada-salidaest´a descritaporlaEcuaci´on(9.1).Estecontroladoract´uaatrav´esdelavariable manipulada u(t)detalmaneraquegarantizaunobjetivodeseguimientode lareferencia r(t)enlavariabledeproceso y(t).Tengaencuentaquela amplituddelaacci´ondecontrolesmayorparavaloresdeerrormayores. Figura9.1– Sistemadecontrolproporcional.

Cap´ıtulo10
Elconceptoasociadoalcontrolproporcional-integraleselsiguiente:la acci´ondecontrolPIsecomponededospartes,unadelascualesesproporcionalalerrordeseguimientoylaotraalaintegraldelerrordeseguimiento.
Enestecap´ıtuloyenelsiguiente,presentaremoslaterceraestrategiade controlestudiadaenestelibro:controlderetroalimentaci´onproporcionalintegral(PI).Acontinuaci´on,discutiremoselconceptob´asicoasociadoa laacci´onintegral,lasventajasdeutilizarestetipodeacci´onjuntoconla acci´onproporcional,laimplementaci´ondeestaestrategiadecontrol(en circuitosanal´ogicosymicrocontroladoresdigitales)yalgunosposiblesajustesdesinton´ıaparalossistemasdecontrolPI.Enelpr´oximocap´ıtulo,se presentar´analgunosdetallespr´acticosrelativosalusodelcontrolPIenlas industria.
Controlproporcional-integral(PI)
Comenzamosestecap´ıtuloconunademostraci´onintuitivayformalde laacci´onintegral(I)yc´omosepuedegarantizarelseguimientodereferenciasdeltipoescal´onconerrorcero,as´ıcomoelrechazodeperturbaciones constantes,paraprocesosdeprimerorden.
10.1.Ideab´asica
438Introducci´onalcontroldeprocesos Aligualqueconelsistemadecontrolproporcional,elobjetivoprincipalde estaestrategiaesasegurarquelavariabledeprocesopermanezca,enr´egimenpermanente,enunvalordereferenciadeseado,especificadoporuna se˜nal r(t). As´ı,comenzamospresentandolaleydelcontrolproporcional-integral, paraprocesoscontinuos: u(t)= up(t) Kpe(t)+ ui(t) Ki t −∞ e(µ)dµ , (10.1) donde e(t)= r(t) y(t)eselerrordeseguimientodelasalida y(t)frentea lareferencia r(t).Lagananciaest´atica Kp sellama“gananciaproporcional”, mientrasque Ki sellama“gananciaintegral”. Notablemente,laprincipaldiferenciaentrelaleydecontrolPI,presentadaenlaEcuaci´on(10.1)ylaleydecontrolP,presentadaenlaEcuaci´on (9.1),eslaparteintegradora,dadapor ui(t)= Ki t −∞ e(µ)dµ Porlotanto,antesdediscutirconmayordetalleestaestrategiadecontrol comountodo,ent´erminosdeimplementaci´onyajustes,entendamosporqu´e esinteresanteusarlaacci´onintegral ui(t)enunlazoderetroalimentaci´on. Paraello,presentaremosunejemploilustrativoymotivadorsobreelefecto delaacci´onintegralenlossistemasdecontrol. 10.2.Acci´onintegral:unejemplomotivador Enelcap´ıtuloanterior,estudiamoselcontroldeniveldeuntanquede agua,cuyavariablemanipuladafuelaaperturadelav´alvuladeentrada delcaudaldeaguaaltanque,considerandoelcaudaldesalidacomouna perturbaci´on.Enestesistema,concluimosquelosdiferentespuntosdeoperaci´ondeltanqueseobtienenensituacionesconcaudalesdeentradaysalida
ControlPI:aspectospr´acticos
Comenzaremosestecap´ıtulocondoscasosconcretosdelaaplicaci´on decontroladoresPI,paraloscualespodemosilustraralgunosdelostemas mencionadosymotivarelestudioposterior. 11.1.Estudiodecaso:pilotoautom´aticodeunautom´ovilparacontrolarlavelocidad
Considereeldise˜nodeuncontrolPIparamantenerautom´aticamente lavelocidaddeunautom´ovil.Estesistemadecontroltienecomoobjetivo regularlavelocidaddelautom´ovilparaqueviajeporlacarreteraauna velocidadpr´oximadeladeseada.Porlogeneral,estossistemasdecontrolse activancuandoelconductorquierequeelautom´ovilmantengasuvelocidad
Cap´ıtulo11
Enestecap´ıtulocubriremosvariosaspectospr´acticosrelacionadosconla aplicaci´ondecontroladoresPIensituacionesreales.Estosaspectospr´acticos serefierenalusodesistemasdelcontrolproporcional-integralencondicionesnoideales.Tambi´enestudiaremosalgunasfuncionalidadesadicionales deloscontroladoresPIyexplicaremosalgunosm´etodosparamejorarel comportamientoenlazocerradodelossistemascontroladosporestetipo decontrolador.
500Introducci´onalcontroldeprocesos constanteenuntramolargo,sintenerquepreocuparseporlapresi´onque debeponerenelacelerador.As´ı,medianteunbot´onenelpanelactivado porelusuario,elveh´ıculoseponeenpilotoautom´aticoyelsistemade controlseencargadefijarelvalordeaceleraci´ondelmotor.Porrazonesde seguridad,elcontroldelveh´ıculovuelvealmodomanual(reguladoporel conductor)sisepresionaelpedaldelfrenoodelacelerador,ocuandose presionaelbot´ondelpanel. Enestemododepilotoautom´atico,elautom´ovilviajaaunavelocidad casifija.Portanto,podemosutilizarelsiguientemodelolinealparadescribir elcomportamientodelavelocidaddelveh´ıculo v(t): m dv(t) dt = Kmu(t) Kav(t) Fe(t). (11.1) Enestemodelo, m =1000kgrepresentalamasadelautom´ovil, Km = 3000N/Vesunaconstantedelmotorquerelacionasufuerzaconlase˜naldeaccionamientoel´ectrico u(t)dadadentrodelconjunto[0 , 5]Vy Ka =500kg/sesunaconstantequerelacionalavelocidaddelautom´ovil conlafuerzadefricci´oncausadaporelaire.Adem´as,lase˜nal Fe(t)representaunafuerzaexternaalsistemadecontrol,correspondientealefectode lapendientedelacarretera;estafuerzavar´ıaentre0y1500N.Adem´as, enfatizamosqueelsensordevelocidaddelautom´oviltraducelavelocidad medidaenunase˜naldevoltajeentre0y5V,demodoquelavelocidadmedida vm(t)= Ksv(t)sepuedeutilizarenelcircuitoelectr´onicoqueimplementalaleydecontrol.Enestecaso,usamos Ks = 1 6 Vs/m,considerando velocidadesmedidasenm/s. Sustituyendolosvaloresnum´ericosdelasconstantes,tenemoselsiguientemodeloparalavelocidaddelautom´ovil: 2 dv(t) dt + v(t)=6u(t) 0,002Fe(t). (11.2) Destacamosqueestemodelotieneunaconstantedetiempode2segun-
Control proporcional-integral-derivativo (PID)
LaestructuradecontrolPIDseconsiguea˜nadiendounanuevaacci´onde controlalaestructuraPI:laacci´onderivativa,que,comoveremos,puede mejorarelrendimientodelcontroladorPIenalgunassituaciones.
As´ı,enestecap´ıtulocomenzaremospresentandoelconceptodeacci´on derivativapara,posteriormente,analizarpropiedades,nocionesb´asicasde sinton´ıayaspectospr´acticosdelaimplementaci´ondeestaestrategiade control.
Enfatizamosque,enestecap´ıtulo,tambi´enestudiaremostemasrelacio-
Cap´ıtulo12
Enestecap´ıtulo,estudiaremoselcontroladorproporcional-integral-derivativo (PID).Estaeslaestructuradecontrolm´asutilizadaenlaindustria,adem´as deserampliamenteconocidayestudiadaenlaacademia.Losalgoritmosde controlPIDsepuedenencontrarenaplicacionesespec´ıficasdeunsololazo yenpr´acticamentetodosloscontroladoresl´ogicosprogramables(PLC).Los controladoresPIDtambi´enseencuentrancomobloquesespec´ıficosentodos lossistemasdecontroldigital.
556Introducci´onalcontroldeprocesos nadosconlamedici´ondelruidoyelcontrolanticipatorioacopladoalazos PID,temasdegranimportanciapr´actica. 12.1.Laacci´onderivativa:prediciendoelfuturo
2. Esevidentequeelcomportamientofuturodelasvariablesenunsistemadecontrolnoesunase˜naldisponible.Portanto,siseverificaque elusodelainformaci´ondelase˜naldeerrorfuturapuedemejorarel rendimientodelcontrolador,¿esposibleutilizaralg´untipodeestimaci´onopredicci´ondelase˜naldeerrorfuturaparaagregarlaalc´alculo delaleydecontrol?
ElcontrolPI,quepresentamosenlosCap´ıtulos10y11,combinaponderadamentedosaccionesdecontrol:laacci´onproporcional,queact´uasolo sobrelabasedelainformaci´ondeerrorpresente(esproporcionalalerror entrelareferencia-ounaponderaci´ondeella-ylavariabledeproceso)y laacci´onintegral,queact´uaconlainformaci´ondelerrorpasado(integral deerrordesdeelmomentoinicialdetiempohastaelmomentoactual). Entoncessurgelasiguientepregunta:¿podr´ıamosmejorarelrendimiento deestecontroladorutilizandoalgunainformaci´onsobreelcomportamiento futurodelase˜naldeerror?Portanto,tenemosdosaspectosaanalizar:
1. ¿Qu´eventajastendr´ıamosalutilizarelconocimientosobreelcomportamientofuturodelerrorenlaacci´ondecontrol?
Comenzaremosanalizandolasventajasdeutilizarelconocimientodel comportamientofuturodelase˜naldeerrorenlaleydecontrol.Paraello, consideremosunejemplodeunprocesoreguladoatrav´esdeunesquemade controldelazocerradodeltipoPIenunescenarioparaelcualajustamos elcontroladorparaquetengaunarespuestar´apida.
Alaplicaruncambiodereferenciadetipoescal´onaestesistema,observaremosquelavariabledeprocesosemuevehacialareferenciaconuna
Cap´ıtulo13 dosconelcontroldeprocesos.Abordaremoscuestionesrelativasalosniveles decontrolsecundarioyterciario,encuantoalaplanificaci´ondelproceso productivomediantelaoptimizaci´on.
EnelCap´ıtulo7,comentamosquelossistemasdecontrolest´anorganizadosennivelesjer´arquicoscondiferentesespecificacionesyrequisitos.En loscap´ıtulosdel8al12,cubrimoslasestrategiasdecontroldenivelprimario,conespecificacionesdedise˜nocomoseguimientodereferenciayrechazo deperturbaciones.Sinembargo,losnivelesm´asaltosdecontrol(secundario yterciario)tambi´ensondesumaimportanciaparalaplanificaci´ongeneral
Controlavanzado:conceptos b´asicosdeoptimizaci´onyrobustez Enestecap´ıtulo,primeroestudiaremosalgunostemasavanzadosrelaciona-
Posteriormente,analizaremoseltemadeerrordemodelado,esdecir, cuandoelmodelodeunprocesonopuederepresentarfielmenteelcomportamientodelprocesoreal.Enestecaso,sepresentannocionesdecontrol robusto,comolarobustezdelaacci´onintegral.
13.1.Planificaci´ondelprocesodeproducci´on
Enelnivelsecundario,setienenencuentalosaspectosrelacionados conlasinteraccionesentrelossubprocesosylascomplejidadesdelaplanta. Porejemplo,cuandounprocesotienesuscaracter´ısticasquevar´ıanenel tiempoodadasseg´unlaregi´ondeoperaci´on,seutilizanestrategiasadaptativasparaadecuareldesempe˜nodelprocesoapesardeestasvariaciones. Estudiaremos,enlaSecci´on13.3,unpocom´asdeestetema.
Porejemplo,enunsistemadegeneraci´ondeenerg´ıarenovable,conpanelesfotovoltaicosyturbinasdebiog´as,elnivelterciariodecontroldetermina cu´andoproducirm´asenerg´ıaapartirdelbiog´as,enbasealademanda contratadaypron´osticosmeteorol´ogicosqueindicanlairradiaci´onquese recibir´a.Cuandohayund´ıanublado,porejemplo,nohayformadedeterminarunageneraci´onfotovoltaicamuyaltayparacubrirlademanda,habr´a queutilizarm´aselsistemadegeneraci´ondebiog´as.Portanto,lasse˜nales dereferenciatransmitidasaloscontroladoreslocalesdecadaunodeestos dossubsistemasdebensercoherentesconelr´egimenoperativoplausible.
Enelnivelterciario,setienenencuentalosaspectosecon´omicosyde planificaci´ondelaproducci´on.Enplantascomplejas,elr´egimendeproducci´onsedeterminaenbaseaunaplanificaci´onalargoplazo.Eneste nivelsecalculanlosvaloresdereferenciaaenviaraloscontroladoreslocales instaladosencadaunodelossubprocesosdelaplanta.
636Introducci´onalcontroldeprocesos delaproducci´on.
Enmuchosprocesosdeproducci´onindustrialsoloseutilizandosnivelesdecontrol,pasandodirectamentedelnivelterciarioalprimario(sinla aplicaci´ondecontrolavanzado).As´ı,elr´egimenoperativodelosnivelesde controlinferioressedeterminamedianteunaoptimizaci´onest´atica,realizadaenelniveldecontrolterciarioytransferidadirectamentealoscontroles PIDlocales.Acontinuaci´on,estudiaremosalgunosconceptosb´asicossobre optimizaci´onyplanificaci´ondeunsistemadeproducci´on.
Ap´endiceA Problemasysoluciones Enestecap´ıtuloproponemosunaseriedeproblemasrelacionadosconlos contenidosestudiadosydesarrolladosenloscap´ıtulosanteriores.Todaslos problemasvienenconresoluci´on,recomendamosaloslectoresylectorasa intentarresolverlosproblemasantesdeverlassoluciones. A.1.Problema1 Paraconcentrareljugodelaca˜nadeaz´ucar,unaindustriadeca˜nade az´ucarutilizaevaporadoresquealinyectarvapor,aumentanlatemperatura deljugo,evaporandoelaguaquecontieneyaumentanlaconcentraci´onde az´ucar.Paracontrolarlaconcentraci´on,seoperalav´alvulaqueinyecta vaporenelevaporador.Lacalidaddeljugoqueingresaalevaporadores unaperturbaci´ondelsistema.Estudiandoelcomportamientodelproceso enlacercan´ıadelpuntodeoperaci´on,sepropusounmodelolinealdiscreto dadoporlaecuaci´on: y(k)=0,7y(k 1)+ γu(k 1) 0,3q(k 1), donde y(k)eslaconcentraci´ondeaz´ucareneljugoenlasalida, u(k)esel caudaldevaporinyectadoy q(k)esladiluci´oneneljugoenlaentradadel
670Introducci´onalcontroldeprocesos evaporador.Lasmuestrassemidencadasegundoy γ esunaconstantereal. (a)Paradeterminarelvalorde γ serealizaelsiguienteexperimento:el sistemapartedelreposo,con u =0, q =0, y =0yseaplicaunescal´on deamplitud0,1en u,manteniendo q =0;despu´esdediezsegundos, semide y(10)=0,195.Encuentrelaformageneraldelarespuestadel sistemaparaelexperimentopropuesto.Usandodatosdelexperimento, determineelpar´ametrodelmodelo γ ycalculeelvalorfinaldelasalida (y(∞)).¿Cu´aleslagananciaest´aticadelmodelodelsistemaparala relaci´onentre u y y? (b)Ahoraconsidereque γ =0,6.¿Cu´aleslagananciaest´aticadel modelodelsistemaparalarelaci´onentre q y y?¿Cuantotiempoel sistematardar´ıaensalirdelreposoyllegara y = 0,0975cuandose aplicaunescal´onde0.1deamplituden q,manteniendo u =0? (c)UncontrolproporcionalconBIASdelaforma u(k)= Kp(r(k) y(k))+BIASseusaparacontrolarlaconcentraci´on,donde r(t))es lareferenciadetipoescal´ondeseada.Encuentreelmodelodin´amico delsistemadelazocerrado(considere γ =0,6).¿Qu´e Kp deber´ıa usarparaobtenerunagananciaest´aticadelazocerrado(entre r y y) de2/3?Conel Kp encontrado,¿ser´ıaposibleajustarelBIASpara quelaconcentraci´onalcanceelvalorde r =1silaconcentraci´onde entradaesconstanteeiguala q =0,5?¿Cu´aleselvalordelBIAS? Encuentreeltiempoaproximadoparaalcanzar95%delvalorfinalen unexperimentodonde q =0yBIAS=0semantienenconstantesy seaplicaunescal´ondereferenciadeamplitud0,2. A.1.1.Resoluci´on a) Sabemosquelaformageneraldelarespuestadelsistemaparaun escal´ondeamplitud u0 yunescal´ondeamplitud q0,ambosaplicadosen
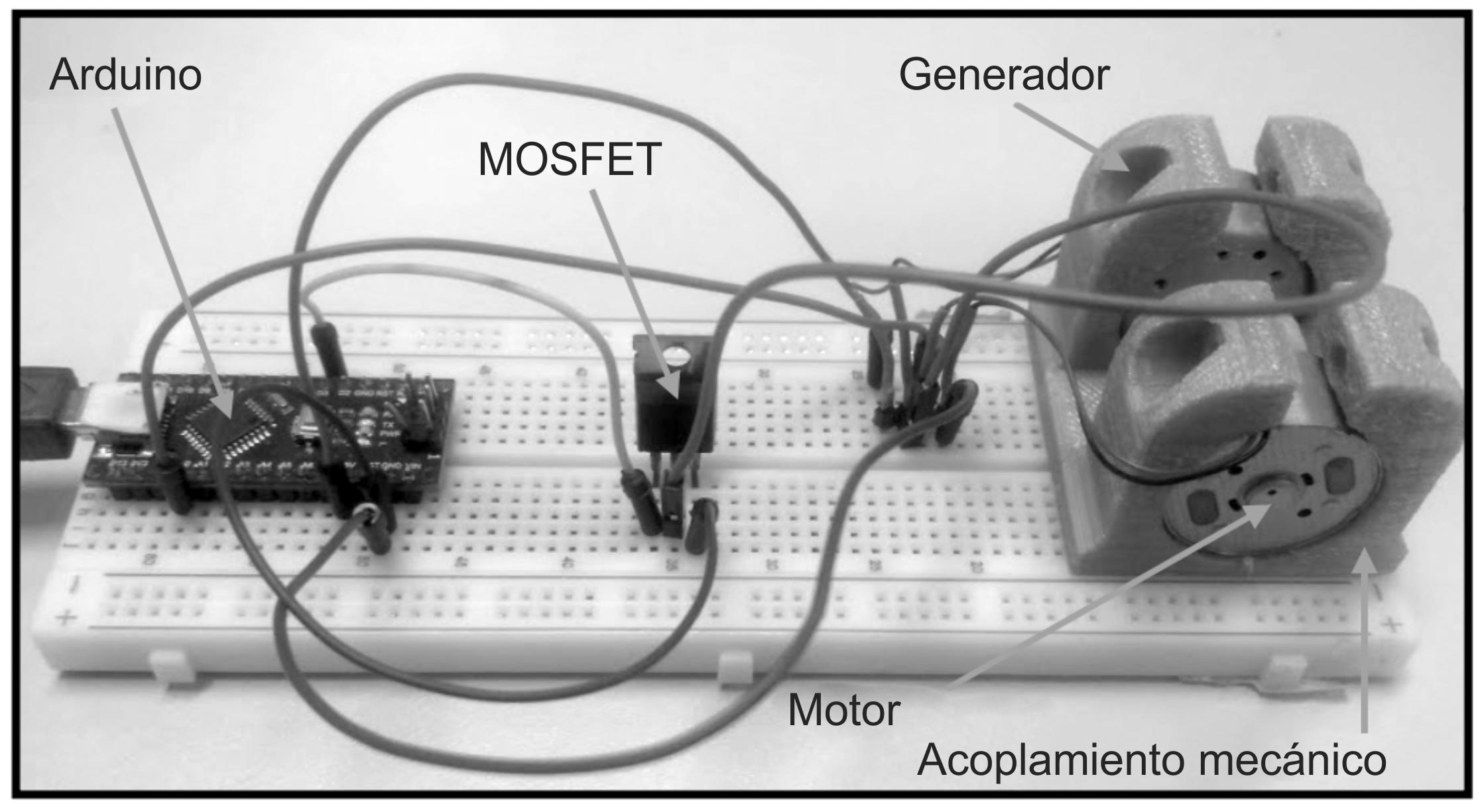
Ap´endiceB Kitexperimental:controlde velocidaddeunmotordeCC EnesteAp´endice,presentamosunmanualparaconfigurarunaplataforma decontroldigitalexperimentalparaprobarvariasdelasmetodolog´ıaspresentadasalolargodeestelibro.Elsistemapropuestopermiteelcontrol develocidaddeunparmotor-generadorformadopormotoresdecorriente continua(CC). B.1.Kitexperimental Elkitexperimentalpropuesto,comoseilustraenlaFiguraB.1,tiene unbajocostodemontaje.Parasufabricaci´onsonnecesarioslossiguientes componentes: dosmotoresdeCCde5V; untransistorMOSFET; unaprotoboardpeque˜na; cablesdecobre(jumpers);
Elprimermotoresimpulsadoporunvoltajedeentrada Vi(t)ygirandoa unavelocidadderotaci´on ω,hacequeelsegundomotorsemueva,generando unvoltaje Vo(t)enlosterminalesdelsegundomotor.Porlotanto,lase˜nal
700Introducci´onalcontroldeprocesos unmicrocontroladorArduino.
FiguraB.1– Fotodelkitexperimentalelaboradoporlosautores.
FiguraB.2– Montajedelprocesomotor-generador.
Losdosmotoresseencuentranacopladosmec´anicamenteporsueje, comosemuestraenlaFiguraB.2.

Ap´endiceC Simuladoresdeprocesos Paraquelasestrategiasdecontrolpresentadasalolargodeestelibropuedan serprobadasyanalizadas,hemosincluidodosherramientasdesimulaci´on comomaterialdid´acticocomplementario. Estasherramientassongratuitasypermitenlasimulaci´ondeprocesos SISOmodeladosporlasiguienteEDO: τ dy(t) dt + y(t)= Keu(t)+ Kqq(t). (C.1) Estasherramientastambi´enconsideranelruidodemedici´on,como: ym(t)= y(t)+ ν(t), (C.2) donde ym(t)eslase˜nalmedidaqueserefierealavariabledeproceso,utilizadaporunaestrategiadecontrolparaformalizarunaacci´ondecontrol u(t).Lasperturbaciones q(t)sondeltipoescal´on,aligualquelase˜nalde referencia r(t). Lasherramientassonlassiguientes: 1. HerramientaimplementadaenMatlabdesarrolladaporlosautoresde estelibro,disponibleen http://livro.link/sbanm01.
710Introducci´onalcontroldeprocesos 2. Herramientaqueseejecutadirectamenteenlossistemasoperativos Windows,LinuxyMacintosh,desarrolladaporlosprofesoresJos´eLuis Guzm´an,KarlJ. ˚ Astrom,Sebasti´anDormido,ToreHagglundeYves Piguet,disponibleen http://livro.link/sbanm02 Enlosenlacesanteriores,seincluyeninstruccionesydetallesparausar cadaunadeestasherramientas.
En este libro, se estudian las principales estrategias de control utilizadas en la práctica industrial: control on-o�f, P, PI y PID. Además, se analizan aspectos prácticos relacionados com la implementación de estas técnicas, como la presencia de perturbaciones, ruido de medición y saturación del actuador. Todos los pasos necesarios para el diseño de un sistema de control básico se tratan en el libro, desde el análisis de datos experimentales hasta la síntesis de la ley de control y su respectiva implementación en bucle cerrado. El libro también tiene varios ejercicios, problemas resueltos y actividades propuestas, así como guiones para experimentos prácticos que se puede desarrollar en un kit experimental de bajo costo, propuesto como una plataforma de validación de técnicas de control para principiantes. EN ESTE LIBRO, LOS ELEMENTOS BÁSICOS DE LA TEORÍA DEL CONTROL DE PROCESOS SON ANALIZADOS CON UN ENFOQUE ORIENTADO A PRINCIPIANTES.
COMO TODO EL CONTENIDO DEL LIBRO SE DESARROLLA EN EL DOMINIO DEL TIEMPO, LOS ESTUDIANTES SOLO PRECISAN TENER CONOCIMIENTOS PREVIOS BÁSICOS DE FÍSICA Y CÁLCULO.