S OCIAL E NGAGEMENT E XPLORER
SOCIAL ENGAGEMENT EXPLORER (S.E.E.) SEEKS TO PROVIDE AN INTEGRATED COMPUTATIONAL PLATFORM AND ROBOTICALLY RECONFIGURABLE ARCHITECTURE TO ENABLE THE FORMATION AND ADAPTATION OF EMERGENT COMMUNITIES. A DISTRIBUTED ROBOTIC MATERIAL SYSTEM WAS DEVELOPED COMBINING ROBOTICS FOR ASSEMBLY AND RECONFIGURATION.

ROBOTS ARE COMPOSED OF TWO PARTS: 1) A THREE WHEELED ROVER AND 2) A BESPOKE ROBOTIC ARM LINKAGE WHICH INTERFACE WITH THE PANEL SYSTEM. THE TWO ROBOTIC ELEMENTS ARE COMBINED AS ROVING ASSEMBLY ROBOTS WHICH BREAK INTO TWO PARTS FOR VARIOUS COLLABORATIVE TASKS SUCH AS CRAWLING ON PARTS AND REVERSIBLE ASSEMBLY SEQUENCES. A MECHANICAL PANEL SYSTEM WAS DEVELOPED IN PARALLEL ENABLING LOCKING, UNLOCKING, AND ADJUSTMENTS TO SPATIAL ASSEMBLIES.
A COMPUTATIONAL PLATFORM WAS DEVELOPED WITH REINFORCEMENT LEARNING FOR AUTONOMOUSLY ASSEMBLING CONSTRAINED SPATIAL CONFIGURATIONS WHICH NEGOTIATE THE REQUIREMENTS AND SOCIAL ALIGNMENT OF A COMMUNITY OF USERS. USERS SHARING SPACES CONNECT THROUGH A TRANSACTIONAL VIRTUAL PLATFORM USED BOTH TO DRIVE COLLECTIVE SPACE TRANSFORMATION AND VIRTUAL SOCIAL INTERACTION.
CHECK OUT THE PROJECT!


TEAM MEMBERS |
Doaa Alqaderi, Hang Li, Sarea Fang, Tianyu Liu, Yuxuan Dai
MArch Architectural Design Project B - Pro Programme
Bartlett School of Architecture | UCL
2021-2022
Living Architecture Lab | RC3

Artificial Intelligence and Autonomous Generative Design
Course Tutor | TYSON HOSMER, OCTAVIAN GHEORGHIU, PHILIPP SIEDLER
INPUT SYSTEM
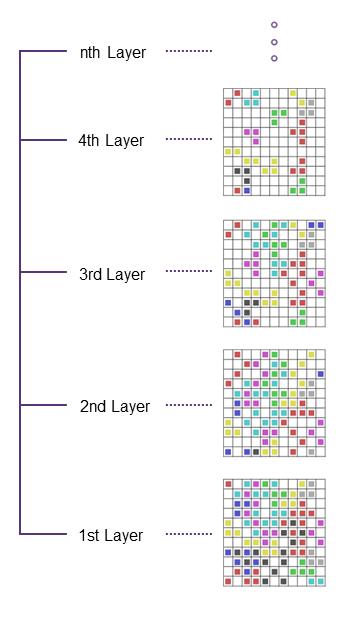
SEE Game Rules Based on Conway’s Cellular Automata “Game of Life”


Conway’s Game of Life could be defined as: a grid consisting of 2D squares, each one of which has one of two states, alive or dead, and doesn’t need any inputs; the initial state of an entity determines its evolution. The concept behind Social Engagement Explorer is that a cell will live or die based on the number of cells around it. Our own game rule was inspired by Conway’s rule, which stipulates that the location of the user is determined by the color of its neighbors.
For instance, the 2D game rule states that if the number of red classified neighbors is between 2 and 4, red’s room will remain, otherwise it will be re-allocated. A red integrated room will emerge if there is no room in the middle, and there are 3 red categorized neighbors.


In other words, the SEE reinforced platform will look through the system for proper space for each user until they are satisfied with it. Hence, if the generated virtual structure contained any users surrounded by neighbors that did not meet the grouping criteria, it would be moved immediately into an alternative zone (Conway’s Cellular Automata Logic) until they are satisfied with the generated space to be executed with the autonomous agents.

Game Rules
r < r0 ,
r0≤ r ≤ r1 ,
> r1 ,
r2≤ r ≤ r3 ,
r = the number of neighbours with the same color [ r0 , r1 , r2 , r3 ] e.g. [ 2 , 4 , 3 , 3 ]
Feel lonely, Non-exist.
Balance, Exist. r
Crowded, Non-exist.
Balance, Exist.
Game Process











SEE PLATFORM LOGIC Bonding Virtuality to Reality Sign Up STEP 1 STEP 2 STEP 3 Received an Offer Find Accommodation Input Data Assigned Spatial Group Data Transformation Pre-experience in SEE Game Select Site Select Date Input






7
6
STEP 4 STEP 5 STEP
STEP
Reality Virtual World Build in Reality Satisfied Unsatisfied Move In Give Up Moving In Output
Game Platform
Screen

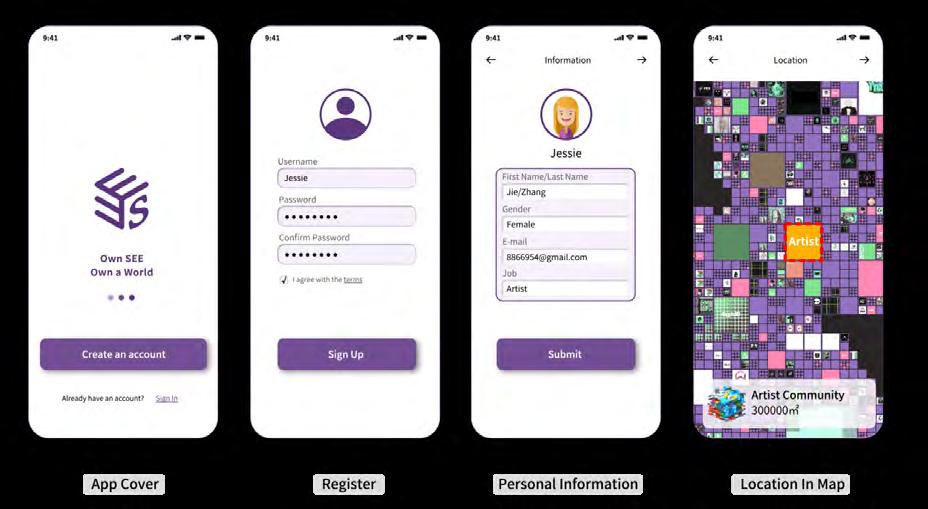
User Registration Interface
Register to create an account and fill in the personality, schedule and preferences form. The user can then select the community they want to enter and their preferred scene on the map.
Start
Input I User Registration Interface
Game Scenatio
Game Scenatio
Scene 1
The frst game scene is PALM, where the player can choose whether to stay or not. Players can socialise with the NPCs in the game scene by eating gold coins. In the process of communicating with the NPCs, players will be given basic information about the entire game.
The second scenario is AUORA, where players can also talk to other players and NPCs by collecting gold coins, and where they can view details of people and things around them. Players can choose their preferred game scenario from the map.
Scene 2






Move to Accommodation in Reality Tour Guide Site Selection Site Selection Site Selection Site Analysis Move in! Move in
Users can select the address they want to live in and view the details of the address in the SEE App.. After that, choose the time they want to move in.
Construction : Move to Accommodation in Reality


In real life, team robots will build collaboratively. For best efficient, the team robot will use for rebuild and rotate wall, dynamic component will use for sliding, install robot will add new for expending.

in Reality
GEOMETRIC EXPLORATIONS
For the initial spatial geometric explorations, each generated unit is classified into 8 colors (R, G, B values). These colors represent personalities, hobbies, and lifestyles which are suitable for specific spatially designed units. As a result, we have a catalogue of distinct units to meet the requirements of different color users. There are two categories on the list: private residential and shared units.
The Set Theory and Spatial Design Algorithm were used as a way of aggregating those units into specialized spaces for our system users.
Following units generation and constructions are the voxelization of units into smaller parts. This step was done as a way of aiding the robotic agent in assembling the larger units to create spaces. In order to achieve a secure component system, we started by ensuring that the locking mechanism between the components and the robotic agents and the joint systems was secure. We also fabricate those components out of different materials. Also, we’ve investigated larger voxelated units with different scenarios for the studying the inner and external layout for the targeted user in our system.
Research Unit Logic 3M 6M 3M 6M Solid Unit
01
Spatial Units & Components Design
Example
Subdivision 3M 6M Further Subdivision Unit Form Development Detailed Unit Unit Form Development Detailed Unit
Example 02


























Research
Potential Residential 05 Plan B Unity Disjointedness Playground 05 Plan B Disjointedness Gallery 05 Plan B Containment Shop 05 Unity
Spatial
I Unit Features &




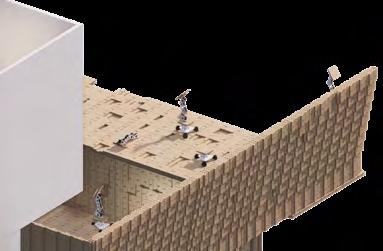
INSTALL & TRANSPORT ROBOT STUDIES



Component Parts Specification

Material: Wooden Boards
Component Size: 25 X 25 X 3 CM

Weight: 216g / Part (Solid)
116g / Part (Hollow)
Transportation & Installation
5 Degrees of freedom
Collaborative Task 01
Training the team robot to assembly the wall collaboratively.


Transportation X Installation Transport Robot 01. Max Capacity=1.3 x Self Weight 02. 2 Wheels Different Direction=Forward 03. 2 Wheels Different Direction=Backward 04. Right Wheel Rotation=Turning Left 05. Left Wheel Rotation=Turning Right 06. 3 Wheels Same Direction=Self Rotate 07. 3 Wheels Same Direction=Round Origin 08. HC-06 Bluetooth Control 09. Machine Learning with Distance Sensor 4 Degrees of freedom Install Robot 01. Component Part Max. Collecting Distance. 02. Transport Robot Importance. 03. Amount of carried parts - 1 04. Angle of Rotation 05. Vertical Installation 5 Degrees of freedom Limitation 01. Centre of Gravity Balance 02. Axial gravity 03. Accuracy 04. Yawing Moving Trail Component Parts Specification Material: Wooden Boards Component Size: 25 X 25 X 3 CM Weight: 216g / Part (Solid) 116g / Part (Hollow)
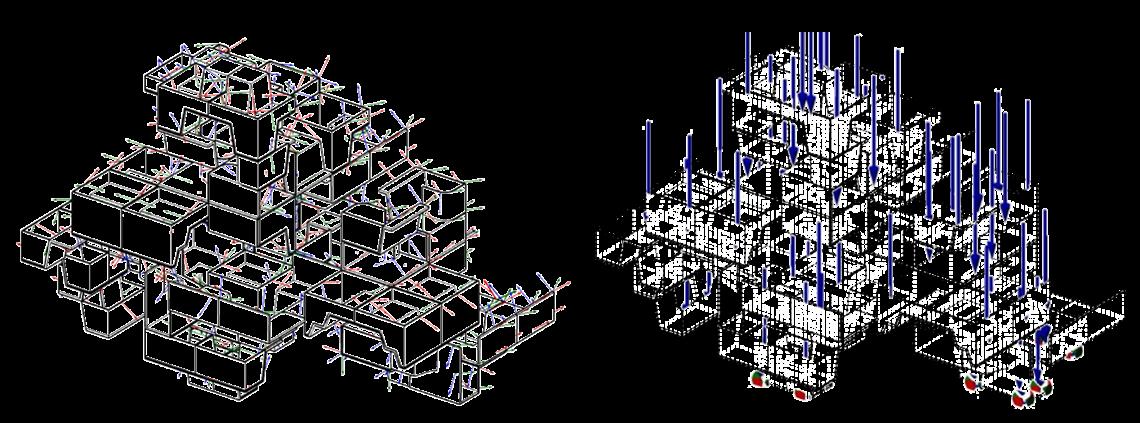
CONSTRUCTED CLUSTER FORCE STUDY
Generated Cluster - Structural Simulation

Users Color Code – All 8 Categories
Density: 480kg / m3

From the previous generated cluster and with the aid of the spatial design assembly, the structural simulation applied for that cluster. The chosen materials for this simulation was wood(Chips Board). With the materials corner display, the grain and growth directions were generated. As well the load was defined for both units and the gravity was pointed out as the system restraint.
100 User ? 50 Units ? Load Load Restrain
Selected Material:
Material Corner Display ☑ Grain Direction ☑ Growth Direction Loads & Restraints ☑ Upper units Weight ☑ Lower units Weight ☑ Foundation - Gravity
Therefore, the displacement and deflection simulation was formed. As a result, the detached tilted cantilever had the max. rate of displacement and that can be easily seen through the deflection simulation. Thus, more supporting components are needed for that area as base and as a reinforcement.





•

Displacement Summary MIN MAX Amount Location 1.1257E-009 m 63.9987, 630.8149, -12.3249 4.0613E-002 m 82.0587, 643.3701, 12.0000
Deflection Analysis MAX Displacement * iteration 00 MIN Displacement * iteration 02 * iteration 01 Deflection Analysis Deflection Analysis Deflection Analysis Deflection Analysis Deflection Analysis Deflection Analysis MIN MIN MIN MIN MIN MIN Scale 0 10 Scale 0 10 Scale 0 10 MAX MAX MAX MAX MAX MAX 3 7 2 4 Deflection Treatment
Unsupported Angle
Excessive Robotic Agents
Dynamic Movements
-
-
•
Weight
Strengthen
-
with CF - Agents Reduction
SITE GLOBAL SCENARIOS



Space Transformation (Summertime)

Wind Rose Analysis
Location: London City , UK
1 JAN 1:00 – 31 DEC 24:00
Calm for 6.82% of the times = 597 Hrs.
01 02
The second passive strategy would be wind rose. Wind Directions around site can give an overview of natural cooling that can be harnessed for ventilation. Perforations can be focused on the south-west directions for cooler spaces during summer. During summertime space transformation, the autonomous SEE agents is programmed to apply the Chimney Strategy in addition to Space Enclosure (Prevalent Wind During Summer) for a cooler inner and outdoor spaces.
UK Most Common Winds: Prevailing Winds Dominantly From South-West


01 02
Whereas, for the Wintertime transformation, the agents will create a structure that blocks the Cool Prevalent Wind During Winter for a warmer winter.
Space Transformation (Wintertime)