2 minute read
La Robótica Moderna hacia el Futurismo


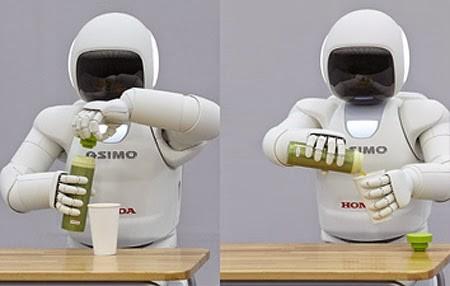
Año 2000, Honda presentó el ASIMO (Advance step in innovative mobility), un robot androidede120cmdealturay 43kg de peso, que ya se encuentra disponible en el mercado
En la actualidad, se creó otros robots destinados a realizar tareas de limpieza doméstica, como los plafones móviles de IRobot, que se conocen como Scooba y Roomba28, de los cualessehanvendidomillones deunidadesenEstadosUnidos.
Advertisement
Taxonomías de la robótica divida en: Cronológicas (Generaciones)
Primera Generación de la Robótica: Robots Manipuladores
Aquí pertenecen los primeros robots, los desarrollados en los inicios de la segunda mitad del siglo XX. En muchas bibliografías son catalogados como “robots manipuladores”. Su sistema es bastante sencillo, realiza tareas repetitivas previamente programadas que se ejecutan de forma manual o secuencial fija. Estas tareas suelen ser de recoger y colocar elementos en cierto lugar, con grandes limitaciones en sus movimientos. Como no tienen conocimiento alguno del entorno, se clasifican como sistemas de lazo abierto, pues no poseen esa retroalimentación para verificar los resultados o errores. Estos tipos de robots aún existen y son utilizados en muchas industrias.
Segunda Generación de la Robótica: Robots de Aprendizaje
Surgen en los años 80. Conocidos como los primeros robots de aprendizaje, siendo capaces de memorizar secuencias de movimientos previamente realizadas por un operador humano. Se caracterizan por tener la capacidad de desplazarse (posiciones fijas) y poder percibir parte de su entorno, mediante sensores especializados. Debido a esto, se convirtieron en sistemas de lazo cerrado, con sistema de retroalimentación básico, pudiendo verificar parte de sus resultados. En la actualidad son utilizados también, fundamentalmente en la industria de la automoción, realizando tareas de pintado, traslado y ensamblaje de piezas en las cadenas de montajes.
Tercera Generación de la Robótica: Robots de Control Sensorizados
Fueron denominados como la generación de robots de control sensorizados. La característica fundamental que los hizo superiores fue la posibilidad de que pueden ser reprogramados a través de ordenadores, permitiéndoles ver (visión artificial) y tocar empleando sensores y lenguajes de programación. Esta generación tiene mayor conocimiento del entorno permitiéndole modificar su estrategia de trabajo o desplazamiento, por lo que sistema de control es de lazo cerrado. Algunos estudiosos plantean que aquí comenzó la era de los robots inteligentes.

Cuarta Generación de la Robótica: Robots Inteligentes
La generación de los robots inteligentes, similares a los de la cuarta generación, pero con la posibilidad de tomar decisiones en tiempo real y libertad de movimiento o para completar sus tareas. El procesamiento de la información recolectada por sensores, cada vez más precisos, era muy superior a generaciones anteriores. Su desarrollo se determinó, en su mayoría, por la utilización de modelos de análisis con lógicas difusas y redes neuronales, que fueron claves en esa época, finales del siglo XX e inicios del XXI, donde el crecimiento de la informática y electrónica fue exponencial. Se utilizaron en muchísimas actividades de todos los sectores posibles, desde aplicaciones industriales hasta de servicios y entretenimiento. En la actualidad, muchos comienzan a verse con aspectos humanoides.


