
1 minute read
COLLECTIVE BEHAVIOUR


Cybernetic Agent Based System
The proposal examines a high population of agents that can be deployed on site. Whose agency is to self organize as a swarm based system with the intentionality of performing the sand-to-glass fusion. Utilizing the idea that a bottom up approach allows the system to be much more potent to scalability at a scale of an infrastructure, as proposed in the thesis. The system is cybernetic in its ability to communicate with the changing states of the dunescape.
Advertisement
Pathfinding
Non-Fusion Mode
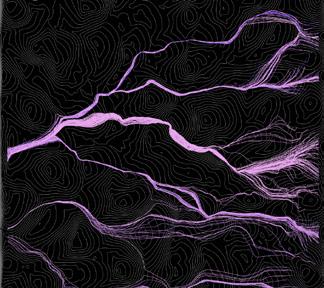
In non-fusion mode, the agents attempt to travel using the easiest path of traveling between the sloped terrain. In this case, they move on the lower parts of the landscape, between dunes.
Fusion Mode
During fusion mode, the agents spread out and attempt to travel on the slopes of the dune in order to fuse a larger area of the slope together. Their path of travel is generated by vector-fields that flow along the back faces of the dunes.
























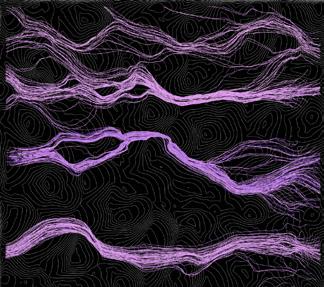






SWARM BEHAVIOR W/ HIGH POPULATION OF AGENTS










The terrain is analysed to gather key data points that will enable the agent-based system to make autonomous, real-time decisions. These values are translated into a colour map to provide a visualization of how the agents will perform in different areas. Orange areas have lower values and are characterized by stronger agent cohesion behaviour while blue areas have higher values and are characterized by stronger separation behaviour. This helps to optimize and improve the performance of the generated structure. For example, orange areas are denser than blue areas, providing a thicker, more rigid foundation to support the structure.





