
12 minute read
PROPUESTA DE UN ROBOT SEMBRADOR PARA SU APLICACIÓN EN LA AGRICULTURA DE LA REGIÓN


Por: Luis Cortez Calderón, Profesor de Tiempo Completo del Tecnológico Nacional de México/ Instituto Tecnológico Superior de San Martín Texmelucan.
Araceli Vivaldo Vicuña, Profesor de Tiempo Completo del Tecnológico Nacional de México/ Instituto Tecnológico Superior de San Martín Texmelucan.
Advertisement
Alfredo Márquez Vázquez, Profesor de Tiempo Completo del Tecnológico Nacional de México/ Instituto Tecnológico Superior de San Martín Texmelucan.
RESUMEN
En este artículo se generó una propuesta de diseño de un robot sembrador, la cual tiene la siguiente metodología: se realizó una investigación exhaustiva de distintos robots autónomos, en la cual se obtuvo las diversas tareas, propósitos o aplicaciones que realizan, como por ejemplo, la exploración de terrenos. Posteriormente se realizó un análisis detallado de las características fundamentales que un robot debe poseer, para así usarlas como cimientos del primer prototipo a realizar. Esto se complementó con la información recopilada sobre la agricultura de México, Puebla y en especial la de San Martin Texmelucan. De esta manera se hizo la propuesta del diseño de un robot sembrador, la cual fue realizada en el software CAD SolidWorks 2018®. Así mismo se propuso las condiciones y dispositivos mecánicos y electrónicos a utilizar. Esta última propone el uso de microcontroladores de la plataforma XIDE y microprocesadores de la plataforma Raspberry Pi, donde son los componentes a implementar físicamente.
ABSTRACT
In this paper generated a design proposal for a seeding robot, which has the following methodology: an exhaustive investigation of different autonomous robots was carried out, in which the various tasks, purposes or applications they perform were obtained, such as, for example, Land exploration. Subsequently, a detailed analysis of the fundamental characteristics that a robot must possess was carried out, in order to use them as the foundation of the first prototype to be carried out. This was complemented with the information collected on agriculture in Mexico, Puebla and especially that of San Martin Texmelucan. In this way the proposal for the design of a seeding robot was made in the SolidWorks 2018® CAD software. Likewise, the conditions and mechanical and electronic devices to be used were proposed. The latter proposes the use of microcontrollers of the XIDE platform and microprocessors of the Raspberry Pi platform where they are the components to be physically implemented.
Keywords: Design, Robot, Sower, XIDE.
INTRODUCCIÓN
México es un país rico en recursos naturales (The economics of ecosystems and biodiversity), por lo cual la mayoría de sus estados se dedican a la producción de diversas cosechas y cultivos, como por ejemplo forrajes, frutas, verduras, leguminosas e inclusive flores. Las cuales en su mayoría se emplean para el consumo interno y externo de la población, lo cual hace que, a nivel internacional (Cronica), México figure como uno los países más importantes en la exportación de diversos productos cosechados en el campo mexicano (poblanerias). De esta misma forma ocurre si se habla de un aspecto estatal, como es el caso del estado de Puebla, en donde aún existe un sector considerable que se dedica a la agricultura, el cual se basa principalmente en diversas técnicas, métodos y herramientas utilizadas para sembrar, cultivar y cosechar diversos productos, como lo son: maíz, frijol, alfalfa, cebada, amaranto, cilantro, cebolla, zanahoria, lechuga, etc. (Sibaris), Acotando aún más la región, se aborda la zona de San Martín Texmelucan, dicho municipio cuenta
con 11 juntas auxiliares, las cuales en gran parte de ellas se dedican a la agricultura, en donde la producción de cosechas varía desde forrajes, verduras, leguminosas y flores. Sin embargo en gran parte de estas locaciones, la siembra de sus productos se realiza de manera manual o semi-automática, puesto que la forma automática, que es por medio de un tractor o cosechadora, es inaccesible y costosa. Cómo solución ante esta problemática regional se ha propuesto la implementación y uso de tecnología especializada para la creación de robots móviles, integrando con ello sistemas mecánicos, eléctricos, electrónicos y de programación. El objetivo de este trabajo es realizar el planteamiento de una propuesta de diseño de este robot, así como un acercamiento a las nuevas tecnologías a emplear para el desarrollo de este proyecto.
DESARROLLO
Para comprender de manera concisa los términos empleados en este artículo es necesario saber que los robots se clasifican en dos grandes grupos: móviles y articulados. Por lo cual estos anteriores se definen como sistemas completos que operan eficientemente en entornos complejos sin la necesidad de estar constantemente guiados y controlados por humanos. Las principales capacidades que debe cumplir un robot son: obtener información sobre el medio ambiente, tipo de suelo y relieve; poder trabajar durante un periodo prolongado sin intervención humana; moverse todo o parte de sí mismo a través de su entorno; evitar situaciones que sean perjudiciales para el correcto funcionamiento del robot; y poder aprender, adquirir y adaptarse a nuevos contextos o entornos para el cumplimiento de sus tareas. Por tal motivo para el desarrollo de este prototipo, se empleó el criterio de un robot móvil, por lo cual las ventajas y beneficios en el uso de este tipo de plataformas son: eliminar operarios humanos en tareas nocivas o perjudiciales para la salud; agilizar tareas repetitivas y pesadas; obtener mayor precisión en diferentes tareas o encomiendas; eliminar riesgos ambientales en la aplicación de ciertos fertilizantes, mejorando a su vez la calidad del producto.

Requerimientos mecánicos
Figura 1. Metodología empleada para el desarrollo del diseño. Fuente: Elaboración propia.
Propuesta de diseño del robot sembrador a realizar y plataformas a utilizar. Una vez que se analizaron a fondo algunos modelos de robots en cuanto a: componentes, tipo de movimiento, mecanismos, programación, sensores, alimentación, complejidad, costos, disponibilidad de materiales, autonomía y aplicaciones. Se procederá a realizar una propuesta de diseño de robot sembrador según las necesidades y los tipos de suelos de la región de San Martín Texmelucan. Por consiguiente, a continuación, se destacan y colocan algunas características mecánicas y electrónicas fundamentales a considerar para el diseño de este robot, tomando en cuenta la edafología de la citada región, la cual se basa en los siguientes tipos de suelos: Phaeozem (27%), Cambisol (13%), Durisol (4%), Fluvisol (2%) y Leptosol (1%) (INEGI).
Para los citados tipos de suelos, la profundidad de siembra del robot a desarrollar debe ser regulable de 10 a 15 cm, para semillas de 5 mm de diámetro, esto va ser posible a través de un mecanismo de tornillo sinfín con un perno ajustable. Es importante mencionar que el flujo de semillas debe ser constante a medida que el robot se desplaza por el terreno, tomando en cuenta un monto de 3-4 semillas a sembrar (INEGI); por lo cual la banda donde se van a transportar las semillas debe ser de 6 mm de ancho.Las magnitudes del robot sembrador a diferencia de los modelos existentes, deben ser pequeñas, las cuales comprenden un ancho total de 60 cm, para poder sembrar fácilmente sin problemas de movilidad a través de los surcos del terreno, y una altura de 70 cm, para darle estabilidad al diseño realizado. Este diseño debe garantizar el correcto funcionamiento y desplazamiento del móvil a través del terreno, sin importar el tipo de suelo en el cual se encuentre, es por ello que se propone el uso de una banda tipo oruga de 25 cm de ancho, acoplado a 4 rodillos dentados que van unidos a los 4 servomotores eléctricos de corriente directa a emplear para su movimiento. Por lo cual este dispositivo deberá estar diseñado, mediante un sistema de amortiguamiento, para soportar un peso inicial de 600 gramos de semillas, para así cubrir una longitud de 260 metros lineales con una separación de sembrado de 20 cm (datos obtenidos mediante estudios de campo).
Requerimientos electrónicos
La alimentación eléctrica del robot sembrador debe ser portátil y compacta, por lo cual es conveniente implementar un sistema fotovoltaico que proporcione 12V CD a 1A, para que posteriormente se meta a una etapa de regulación de voltaje y se puedan obtener voltajes de CD de 3.3V, 5V, 9V, 12V y -12V. Los cuales se emplearán para alimentar los circuitos, tarjetas, servomotores, sensores y cargar a las 4 baterías tipo LiPoTurnigy 3S 25C que contendrá este prototipo.En cuestión de transmisión del movimiento radial hacia las orugas, se emplearán los servomotores Dynamixel MX-64, configurados previamente como tipo rueda y controlados por la expansiónOpenCM 485 EXP de Dynamixel. Puesto que este tipo de servomotores tienen una gran ventaja sobre los demás, ya que poseen internamente un sistema de posición, desplazamiento y torque superior al de los servos comerciales.El uso de sensores ópticos (TCRT5000), ultrasónicos
(HCSR04), acelerómetros (MPU6050), mecánicos (limit switch) y cámaras digitales (Logitech C920) es fundamental para poder realizar el proceso de siembra, a través de la implementación de una técnica de procesamiento de imágenes.Para procesar y manipular toda esta información, en primera instancia se necesita de un microcontrolador de 8 bits para el ajuste de la dirección, tracción y dosificación de las semillas, para ello se utilizará el PIC18F45K50 de la plataforma XIDE de la empresa Microside Technology, el cual cumple con estos requerimientos. Y en segunda instancia para la parte de procesamiento de imágenes, se empleará la microcomputadora Raspberry Pi 3B, acoplada a la cámara Logitech C920mediante USB, que por medio del lenguaje Python y Open CV se hará el procesamiento de imágenes para ubicar el punto de siembra. Lo anterior descrito deberá ser registrado en una memoria o base de datos, en la cual se podrá acceder y corroborar los patrones mientras se realiza el recorrido, para así garantizar un buen funcionamiento de la plataforma.
Navegación mediante reconocimiento de imágenes
La navegación topológica o también llamada cualitativa, depende de la presencia de puntos de referencia en el terreno. Un punto de referencia es una o más características perceptualmente distintivas o de interés en un objeto como: color, forma y textura. Son usados en la mayoría de los aspectos para la navegación de móviles a través de un terreno, en donde necesariamente se emplean puntos de referencia para que el robot pueda determinar cuándo ha completado un segmento y debe comenzar otro. Estos puntos pueden ser tanto natural como artificial, pero debe cumplir con los siguientes criterios fundamentales: Ser fácilmente identificables. Apoyar en la realización de las actividades asignadas.
Figura 3. Vista isométrica del diseño de robot sembrador. Fuente: Elaboración propia.
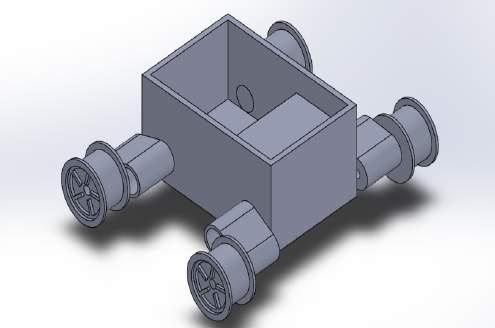
A continuación, se propone una trayectoria de avance sobre el terreno a sembrar (Figura1), así como los puntos de referencia para la ubicación y navegación del robot sembrador sobre el terreno, considerando la información antes descrita: Como se puede apreciar en la imagen anterior, se elaboró un pequeño patrón a reproducir, para que el robot sembrador pueda ubicarse y realizar su actividad principal. Cabe destacar que los puntos de referencia se van a caracterizar, para así poder obtener imágenes de buena calidad y fácil reconocimiento.En las figuras 3, 4 y 5 se muestran las diferentes vistas de la propuesta de diseño del primer prototipo de robot sembrador a realizar:

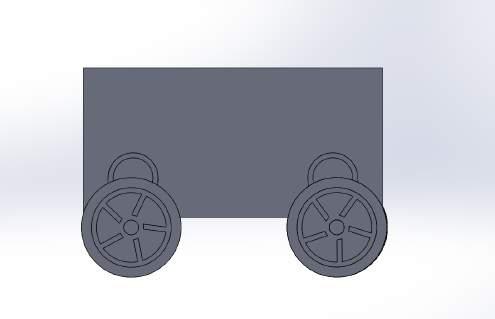
Figura 4. Vista lateral del robot sembrador, en posición de altura máxima. Fuente: Elaboración propia.

Figura 5. Vista lateral del robot sembrador, en posición de altura mínima. Fuente: Elaboración propia.
Con base a la metodología anteriormente propuesta, así como el desarrollo de cada uno de los puntos antes expuestos, se pudo obtener en primera instancia el diseño mecánico del robot realizado en software CAD, los componentes electrónicos, la alimentación eléctrica, los sensores, la tracción, la navegación, y la etapa de reconocimiento de imágenes. Con esta información recabada y analizada, se podrá manufacturará y llevar a cabo este robot sembrador. El cual será aplicado para la siembra, en primera instancia, de maíz en los terrenos de cultivo que comprende la zona de San Martín Texmelucan Puebla. Recordando que este prototipo es la unión de diversas áreas y plataformas para su correcto diseño y futura elaboración. Garantizando con esto un prototipo funcional, el cual emplea tecnología accesible y fácil de manipular.
CONCLUSIÓN
Después de haber realizado una extenuante búsqueda de información referente a robots móviles, el análisis concreto de dicha investigación aporto los pilares base para la propuesta del prototipo realizado. Una ventaja de esta acción es la reducción de costes en material y el tiempo de diseño de este prototipo, puesto que se acoto a las necesidades de la región. Al mismo tiempo y debido a las condiciones del suelo de la zona de San Martín Texmelucan, se seleccionó el tipo de motricidad del robot, la cual versa en ruedas acopladas y montadas a una banda tipo oruga, esto debido a la variada edafología de la región. Además se propusieron elementos de sujeción y ajuste de altura, estos últimos permiten que el robot se levante o pose sobre la tierra para un proceso de siembra adecuado. También se introdujeron los componentes fundamentales a utilizar para este desarrollo tecnológico, los cuales son los microcontroladores de 8 bits de la plataforma XIDE, que al mismo tiempo colaborará con la microcomputadora Raspberry Pi 3B para el reconocimiento de imágenes. Con ello se garantiza la correcta fabricación y realización de pruebas y ajustes, para que posteriormente se realicen mejoras en el diseño mecánico y electrónico propuesto para un prototipo completamente funcional. En conclusión se logró alcanzar el objetivo principal, el cual fue dar una propuesta de robot sembrador; esta se generó mediante el uso de un software CAD y toda la información antes recabada y analizada para un primer diseño mecánico.

REFERENCIAS
Comité Español de Automática. (2011) Libro blanco de la Robótica.1ra Edición. Páginas 42,43 Instituto Nacional de Estadística y Geografía, “Prontuario de información geográfica municipal de los Estados Unidos Mexicanos San Cristóbal de las Casas, Chiapas. Clave geoestadística 07078.,” Inst. Nac. Estad. Y Geogr., 2009. Marco Silva, Luis Garrote, Fernando Moita, Mauro Martins, Urbano Nunes. (2012) Autonomous Electric Vehicle: Steering and Path-following Control System. Sitio web The economics of ecosystems and biodiversity (teebweb) - http://www.teebweb.org/teeb-mexico/biodiversidad/ [última visita 15/07/19] Sitio web CRONICA - http://www.cronica.com.mx/notas/2016/959614.html [última visita 15/07/19] Sitio web Poblanerias - https://www.poblanerias. com/2016/05/puebla-tercer-estado-con-mayor-porcentaje-de-trabajadores-agricolas/[última visita 16/07/19] Sitio web Sibaris - https://sibaris.com.mx/blog/maiz-cafe-cereza-y-frijol-grandes-cultivos-de-puebla [última visita 16/07/19] Sitio web San Martin Texmelucan - http://sanmartintexmelucan.gob.mx/transparencia/leyes/informacion_relevante/Informe_pobreza_eval_acc.pdf [última visita 16/07/19] Sitio web Nextcomrobotics - http://nextcomrobotics.wordpress.com/glosario/ [última visita 18/07/19] Sitio web de proyecto Wall-Ye - http://www.wall-ye.com [última visita 18/07/19] Sitio web de los robots Móviles. www.mobilerobot.org [última visita 23/07/19] Sitio web de Boston Dynamics. Big Dog. http://www. bostondynamics.com/robot bigdog.html [última visita 20/07/19]

Tomada de: http://gno.cicese.mx/










