1 minute read
Jacking and Lifting


Jacking Procedure
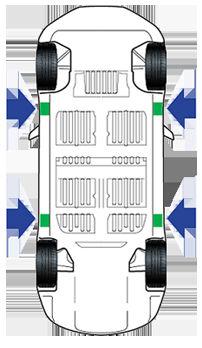
Follow the steps below to lift Model X. Ensure that any non-Tesla repair facility is aware of these lifting points. 1. Position Model X centrally between the lift posts. 2. If your Model X is equipped with Smart Air
Suspension, it automatically self-levels, even when power is off. Use the touchscreen to set the suspension as follows:
• Touch Controls > Suspension. • Press the brake pedal, then touch Very High to maximize the height of the suspension. • Touch Jack to disable self-leveling. 3. Close the falcon wing doors. 4. Position the lift arm pads under the designated body lift points at the locations shown.
Warning: DO NOT position the lift arm pads under the Battery.
5. Adjust the height and position of the lift arm pads to ensure that they are correctly located. 6. With assistance, raise the lift, ensuring the lift arm pads remain in their correct positions. Note: Jack mode cancels when Model X is driven over 4 mph (7 km/h). Note: Jack mode may be unexpectedly enabled in situations where an object is supporting the vehicle's weight (for example the bumper of the vehicle is resting on a curb).
Warning: If your Model X is equipped with Smart Air Suspension, it automatically self-levels, even when power is off. You MUST disable this system by engaging Jack mode before lifting or jacking. If you do not disable
Smart Air Suspension, Model X can attempt to self-level, causing serious damage, bodily injury, or death.
Warning: Never raise Model X when the charge cable is connected, even if charging is not in progress.
Warning: Do not work on an incorrectly supported vehicle. Doing so can cause serious damage, bodily injury, or death.
Caution: DO NOT lift from under the
Battery. Place the lift arm pads under the designated body lift points only. The locations shown are the only approved lifting points for Model X. Lifting at any other points can cause damage. Damage caused by incorrectly lifting Model X is not covered by the warranty.