2 minute read
Process of Creating Physical System


System one
In the first stages of prototyping we focused on inflation, with the use of CO2 cannisters to feed the inflation of the balloons. This system had a number of limitations. Due to the nature of the system it released CO2 in large bursts, held limited amounts and took time to replace each cannister. This was something which was only possible with human aid and, as a result, didn’t function independently. Replacing the cannisters with a continuous source of air, from a component such as an air compressor, would solve the issues discussed.
Advertisement
https://media.giphy.com/media/ Q8fSQLinSMfm5wPcCk/giphy.gif
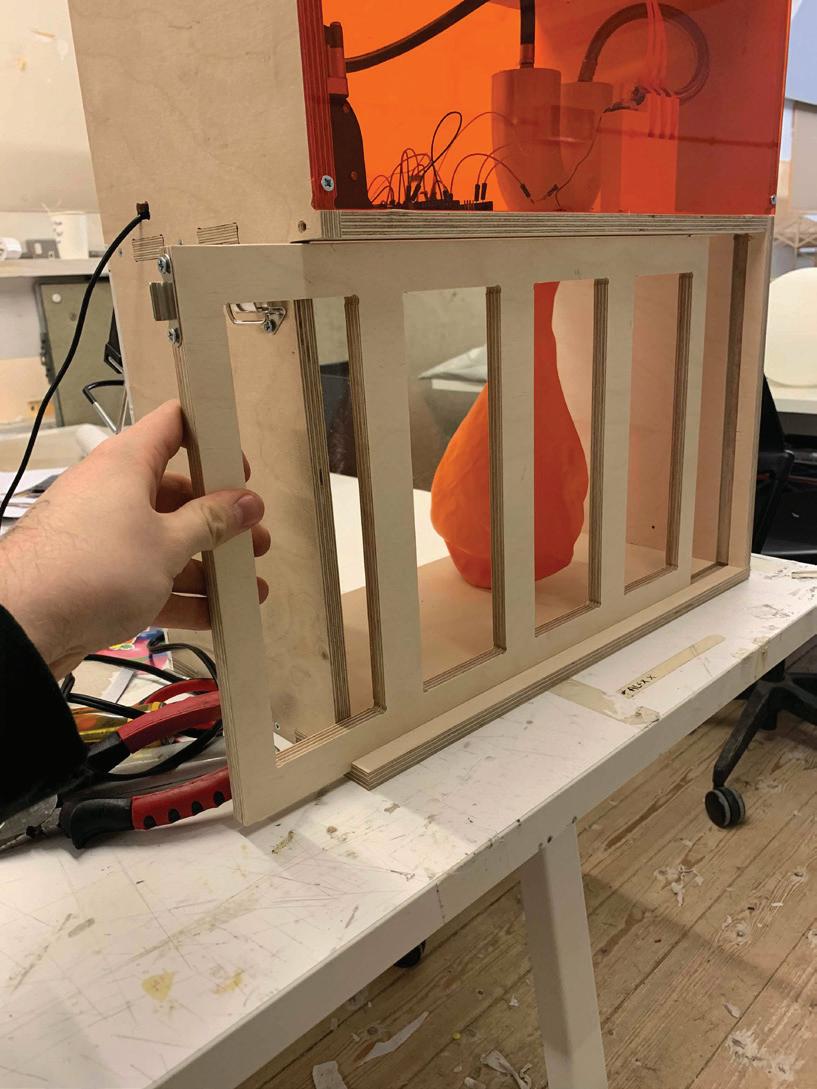
The second limitation was that initially the inflation valve was made from a bike-bit that was embedded into a piece of timber. We used the same mechanism but refined the component by designing a 3D-printed tube that could house both deflation and inflation tubing components.
System two
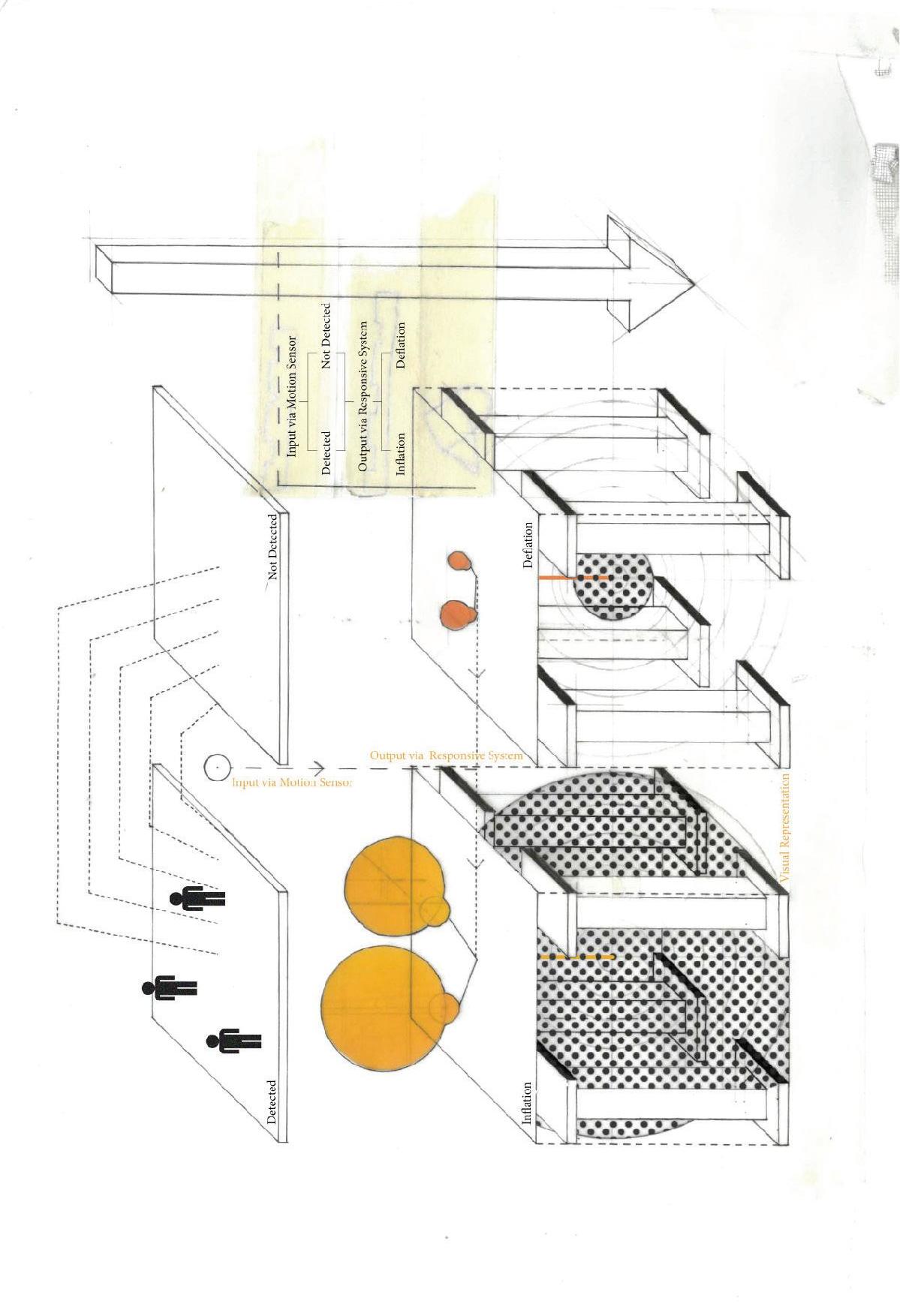
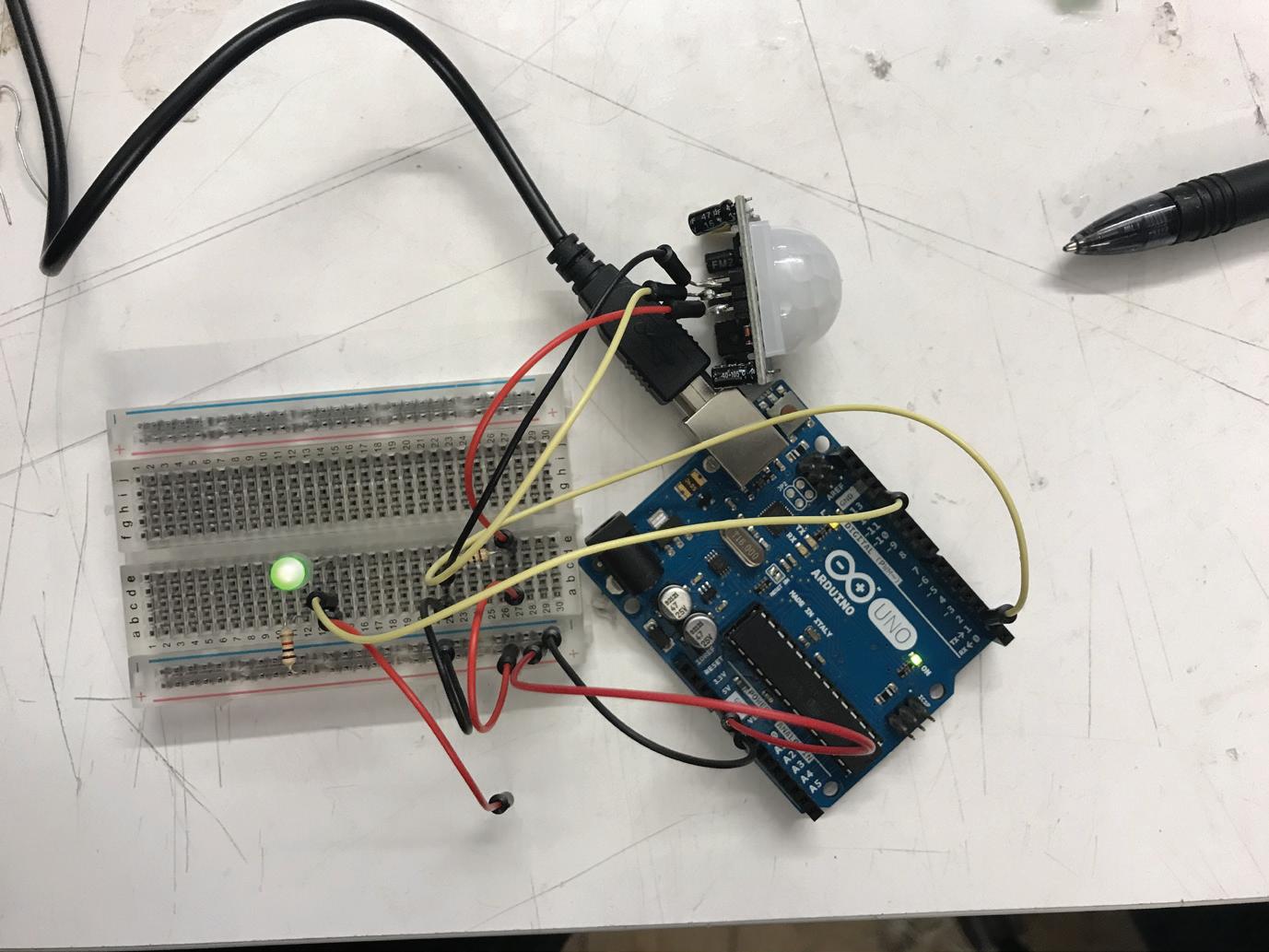
If we wanted our system to be responsive to people flow, it was nessecary to embed a motion sensor into the process. Using a PIR sensor would allow the detection of movement, however not direction specific. Therefore, we altered our design slightly to detect the level of activity at Bute’s entrance rather than the exact entering and exiting of the building.
To activate inflation (Air Compressor) in the second system we positioned two actuators next to the ON/OFF switches. Rather relying on human aid to activate the compressor, the inflation would be triggered by digital means.
System three

After consulting Paul Granjon, we realised we could evolove the system further by replacing actuator A and B, that controlled the compressor, with a relay module.
We replaced the bike valve with a valve extention to activate deflation, as the bike valve was more appropriate for manual interactions ( having to manually twist a knob to realease air), whereas the valve extension had greater opportunities for integration with arduino components, such as servo-motors and linear actuators.

Initially, a regular linear actuator was used to push onto the deflation valve, however after testing we realised the component was too weak to push against the deflation valve and deflate the balloon. We therefore change the component to a linear servo motor that was more powerful.
A 3D-printed platform to house the valve extension to be levelled with the linear servo-motor, and a small 3D-printed adaptor sleeve for the servo-motor (aiding with the pushing of the deflation-valve pin) were also confugured to aid in the system’s running.