

Cijena 10 KN I ; 1,32 EUR I ; 1,76 USD; I 2,52 BAM; I 150,57 RSD; I 80,84 MKD Rubrike I Kodiranje - BBC micro:bitI I STEM-radionice I I Mala škola fotografije I www.hztk.hr Broj 659 I Studeni / November 2022. I Godina LXVI. ČASOPIS ZA MODELARSTVO I SAMOGRADNJU Prilog I Robotski modeli za učenje kroz igru u STEM-nastavi – Fischertechnik (51) I
Otok Sutra i otok Danas
Mali i Veliki Diomed 2 Dizel-hidraulične lokomotive . . . . . . . . . . . . . . . 3
Europski lav . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
BBC micro:bit [33] 8 Robotski modeli za učenje kroz igru u STEM-nastavi – Fischertechnik (51) 13 Mala škola fotografije . . . . . . . . . . . . . . . . . . . 17 Pogled unatrag . . . . . . . . . . . . . . . . . . . . . . . . 19
Sutrašnji otok (Veliki Diomed) i Jučerašnji otok (Mali Diomed).
Otoci Diomeda udaljeni su samo tri milje, ali je veći otok gotovo jedan dan ispred svog manjeg susjeda (21 sat) jer se nalaze svaki s druge strane međunarodne datumske granice koja prolazi kroz Tihi ocean i označava granicu između jednog kalendarskog dana i sljedećeg. Smješteni su u Beringovom prolazu između kopna Aljaske i Sibira.
Veliki Diomed nalazi se na ruskoj strani, dok je Mali Diomed na američkoj strani. Ledeni most koji se zimi formira između dva otoka omogućuje, iako ilegalno, hodanje kratkom udaljenošću između njih i "putovanje kroz vrijeme".
Analiza fotografija 20 Zabranjeni otok 21 Shield-B, razvojna pločica za Arduino Uno (1) 24 Mjerna jedinica farad . . . . . . . . . . . . . . . . . . . 27 CroCube: misija lansiranja prvog hrvatskog satelita u svemir 29 Roboti kuhari 31 Projekt Perun I. 34 Velebni stadioni spremni za SP 2022. u Katru . . . . . . . . . . . . . . . . . . . . 35
Nacrt u prilogu: Robotski modeli za učenje kroz igru u STEM-nastavi – Fischertechnik (51)
Nakladnik: Hrvatska zajednica tehničke kulture, Dalmatinska 12, P. p. 149, 10002 Zagreb, Hrvatska/Croatia
Glavni urednik: Zoran Kušan
Uredništvo: Ivan Jurić – Zagrebačka zajednica tehničke kulture, Sanja Kovačević – Društvo pedagoga tehničke kulture Zagreb, Neven
Kepenski – Modra Lasta, Zoran Kušan – urednik, HZTK, Danko Kočiš – ZTK Đakovo DTP / Layout and design: Zoran Kušan Lektura i korektura: Morana Kovač Broj 3 (659), studeni 2022. Školska godina 2022./2023.
Naslovna stranica: CroCube, misija lansiranja prvog hrvatskog satelita u svemir

Uredništvo i administracija: Dalmatinska 12, P.p. 149, 10002 Zagreb, Hrvatska telefon (01) 48 48 762 i faks (01) 48 46 979; www.hztk.hr; e-pošta: abc-tehnike@hztk.hr “ABC tehnike” na adresi www.hztk.hr Izlazi jedanput na mjesec u školskoj godini (10 brojeva godišnje)
Rukopisi, crteži i fotografije se ne vraćaju Žiro-račun: Hrvatska zajednica tehničke kulture HR68 2360 0001 1015 5947 0
Devizni račun: Hrvatska zajednica tehničke kulture, Zagreb, Dalmatinska 12, Zagrebačka banka d.d. IBAN: 6823600001101559470 BIC: ZABAHR2X Cijena za inozemstvo: 2,25 eura, poštarina uključena u cijeni Tisak: Alfacommerce d.o.o., Zagreb
Ministarstvo znanosti i obrazovanja preporučilo je uporabu “ABC tehnike” u osnovnim i srednjim školama
U OVOM BROJU
ZANIMLJIVOSTI
Dizel-hidraulične lokomotive

Lokomotive su pružna vozila za vuču putnič kih i teretnih vagona te drugih pružnih vozila koja nemaju vlastitog pogona. Prvo takvo vozilo načinjeno je u Velikoj Britaniji početkom XIX. stoljeća, koristeći za pokretanje kotača parni stroj. Prva se praktično primjenjivom lokomo tivom smatra “Puffing Billy” koja se koristila u rudnicima 1813. Prema namjeni, razlikuju se lokomotive za putničke i teretne vlakove, loko motive za specijalne namjene, lokomotive grad ske željeznice te rudničke, tvorničke i ranžirne lokomotive. Upravo su ove zadnje, ranžirne ozna ka: HŽ 2132/JŽ 731 i HŽ 2132/JŽ 732, ovogodiš nja tema hrvatskih poštanskih maraka izdanih početkom listopada. Ove manevarske lokomotive primarno su namijenjene za ranžiranje vagona na željezničkim i ranžirnim kolodvorima. Nekoć su bile korištene i kao industrijske lokomotive te za vuču vlakova na otvorenoj pruzi, što je danas prava rijetkost. Na hrvatskim se željeznicama trenutačno koriste dvije serije manevarskih loko motiva, i to dizel-hidraulične lokomotive oznake HŽ 2132 i dizel-električne lokomotive oznake HŽ 2041.
Prema vrsti pogona, lokomotive mogu biti parne, s motorom s unutarnjim izgaranjem, elek trične, na komprimirani zrak i s parnom ili plin skom turbinom. Vrsta klipnog motora s unutar njim izgaranjem kod kojega se gorivo ubrizgava u zrak stlačen klipom motora naziva se još i dizelski motor ili Dizelov motor. Dizelske loko motive prema vrsti prijenosa zakretnog momen ta s motora na pogonske kotače mogu biti
Slika 2. Prva lokomotiva na dizelski pogon primijenjena je 1912. u Švicarskoj
s mehaničkim, hidrodinamičkim ili električnim prijenosom. Dizelska lokomotiva s hidrodina mičkim prijenosom ima hidrodinamički prije nosnik zakretnoga momenta. U njegovu kućištu, ispunjenu uljem, s jedne strane smješteno je kolo rotacijske turbopumpe vezano na osovinu motora, a s druge turbinsko kolo kojega je oso vina preko sklopa planetarnih zupčanika vezana na pogonske kotače. Tako se pogonski moment prenosi s motora na pogonske kotače bez meha ničkog dodira, hidrodinamičkim silama strujanja ulja između kola pumpe i turbine.
Dizel-hidraulične lokomotive serije HŽ 2133 građene su od 1955. do 1964. u njemačkoj tvornici Maschinen Fabrik-Kiel AG. Lokomotive imaju tri pogonske osovine vezane motkama i hidrauličnim prijenosnikom snage, ugrađen četverotaktni dizelski motor izvedbe “V” s po dva cilindra u zajedničkom bloku. Prijenosnik snage smješten je na stražnjem dijelu lokomotive u postolju sanduka i sastoji se od hidrauličnog mjenjača okretnog momenta, mjenjača voznog


3
TEHNIČKE POŠTANSKE MARKE
Slika 1. Dizel-hidraulične lokomotive su uglavnom manevarske lokomotive namijenjene za ranžiranje vagona na željezničkim i ranžirnim kolodvorima
Slika 3. Jedna od najpoznatijih namjena dizelsko-hidrauličnih lokomotiva je ona za vuču putničkih vagona
režima i mjenjača voznog reda. Zbog njemačkog podrijetla lokomotive su kod nas dobile popularni naziv “švabice”. S obzirom na to da su lokomotive kupljene kao rabljene, uskoro su bile podvrgnute generalnim popravcima tijekom kojih su se najveći problemi pokazali u osiguranju uvoznih rezervnih dijelova, pogotovo za dizelski motor Maybach. Zato je struka predlagala zamjenu postojećega dizelskog motora motorom domaće proizvodnje Pielstick Tvornice motora “Uljanik” iz Pule, no remotorizacija nije nikada izvedena. Lokomotive danas više nisu u aktivnoj službi. Vučna snaga obaju tipova lokomotiva je 441 kW (600 KS), najveća vozna brzina 30-60 km/h, a promjer kotača iznosi 1250 mm. Dužina preko odbojnika obaju tipova lokomotiva je 10 450 mm.
Lokomotive serije HŽ 2132/JŽ 732 građene su između 1969. i 1970. u Tvornici “Đuro Đaković” u Slavonskom Brodu prema licenciji austrijske tvrtke Jenbacher Werke. Prva lokomotiva puštena je u promet 15. listopada 1969. Ukupno su napravljene 132 lokomotive, i to 72 za današnje Hrvatske željeznice, 25 za slovenske željeznice te 25 za potrebe industrijskog manevra. Godine 1977. naručeno je još 10 lokomotiva te serije za Hrvatske željeznice. U lokomotive te serije izvorno je bio ugrađen dvotaktni dizelski motor Jenbach JW600 snage 441 kW (600 KS), hidraulični prijenosnik snage Voith L26St/v, međuprijenosnik Voith N6 600/2 i osovinski prijenosnik Voith A 30SK. Već nakon 1975. lokomotive su postupno bile podvrgnute konstrukcijskim poboljšanjima, a od 1988. i modernizaciji. Modernizacijski zahvati obuhvatili su ugradnju novih četverotaktnih dizelskih motora Pielstick 6PA4V 184 VG i Jenbach JW 240 D, ugradnju novoga turbo-reverzibilnoga hidrauličnog prijenosnika snage Voith L 3r4 te povećanje rashladnoga kapaciteta čelnoga hladnjaka za vodu. Konstrukcijska poboljšanja i modernizacijske zahvate izvodio je TŽV “Gredelj” iz Zagreba sa suradnicima. Ugrađena snaga lokomotive je 441 kW (600 KS), vučna snaga 397 kW (540 KS), najveća vozna brzina 30-60 km/h, promjer kotača 950 mm te masa 44 t.
Pošta za planet Zemlju
Svjetski dan pošte ubraja se među važne datume u svjetskom kalendaru. Obilježava se svake godine 9. listopada. Svjetski poštanski
Slika 4. Dominantna boja u dizajnu “planetarne” marke je zelena, pa se često prvo povezuje s ekologijom ili prirodom
kongres 1969. godi ne u Tokiju, glav nom gradu Japana, proglasio je ovaj događaj radi obilje žavanja godišnjice osnivanja Svjetske poštanske unije (engl. The Universal Postal Union , UPU) 1874. godine. Svrha je Svjetskog dana pošte podići svijest o ulozi pošte u sva kodnevnom životu ljudi i poduzeća, kao i o njezinu doprinosu globalnom društvenom i gospodarskom razvoju. Kao rezultat toga, zemlje članice UPU-a potiču se na organiziranje vlastite nacionalne aktivnosti za proslavu događaja, uključujući sve od uvođe nja ili promocije novih poštanskih proizvoda i usluga do organizacije otvorenih dana u poštan skim uredima, poštanskim središtima i poštan skim muzejima. Svake godine UPU određuje novu temu Svjetskog dana pošte, a ove godine ona glasi: “Pošta za planet”. Postoji mnogo ele menata svakodnevnog poslovanja koje pošte već čine održivijima kako bi osigurale zeleniji planet za buduće generacije. Ovogodišnji umjetnički rad prikazan na brojnim markama, predstavlja pojednostavljenu vizualnu poruku o doprinosu pošte ekološki održivoj budućnosti. Kao središnji motiv, planet Zemlja obilježen je jasnom razli

Slika 5. Svjetska poštanska unija, sa sjedištem u Bernu, inicijator obilježavanja Svjetskog dana pošte i ujedno jedna od najmlađih i najmanjih agencija UN-a

4
kom između noći i dana. Osim što čine kontrast, noć i dan također predstavljaju kontinuitet i evoluciju. Na našoj Zemlji koja se vrti stvari nikada ne miruju; stalno se kreću i mijenjaju. Pošta je prisutna posvuda na našem planetu. U tom smislu, isprekidane linije ilustriraju vezu između udaljenih regija, gdje pošta može doći čak i do onih na najudaljenijim mjestima na našem planetu kako bi svima ponudila širok raspon usluga. Dominantna boja u dizajnu je zelena, koja se često prvo povezuje s ekologijom
Europski lav
Jedna ikonografska životinja još uvijek suvereno luta afričkim savanama, podjednako ponosno kao što krasi i na tisuće europskih ornamenata, kovanica, spomenika i arhitektonskih pročelja. I zaista, lav – kralj životinja – nije nimalo neobičan prizor bilo koje od europskih metropola. Međutim, otkuda on ovdje i kako objasniti tolike lavove u britanskim, europskim i balkanskim civilizacijama i kulturi?!

Postoje bezbrojne drevne kulturne reference na lavove u klasičnoj književnosti, umjetnosti i drugim izvještajima iz cijele drevne Europe, a posebno Grčke. Primjerice, u slavnoj “Ilijadi” čak su opisane različite vrste lavova, a sam Aristotel ostavio je iza sebe zapise o rasprostranjenosti, ponašanju, pa čak i uzgoju i anatomiji lavova. Podsjetimo se i na priču o Heraklu koji je porazio nemejskog lava u južnoj Grčkoj, nedaleko od Tirinta. Herodot je pak pisao o Kserksovim devama koje su napali lavovi tijekom njegove invazije na Makedoniju, dok su bogati Makedonci doista imali lavove prikazane i na svojim grobovima! Ne zaboravimo slavne Rimljane koji su redovito puštali lavove kao poseban “začin” borbi u gladijatorskim arenama. Štoviše, lava možemo pronaći na brojnim povijesnim grbovima, zastavama, pečatima i novcu, a i dan-danas simbol je nekih zemalja kao što je npr. Engleska. U politici je korišten kao simbol snage, ponosa i hrabrosti, pa nije ni čudo što se često
ili prirodom. No zelena također predstavlja rast i obnovu. U psihologiji se zelena često tumači kao boja koja se povezuje s optimizmom, a u ovom slučaju upućuje na nove početke. Bilo da dostav ljaju pakete i pisma, financijske usluge, socijalne i zdravstvene usluge bilo humanitarnu pomoć, pošte rade na održivijoj dostavi. Dizajn kojim se obilježava Svjetski dan pošte 2022. potiče pošte da se nastave voditi primjerom u tom nastojanju.
Ivo Aščić
susrećemo s njim proučavajući povijest europskih dinastija! No, je li inspiracija za sva ta djela potekla od putnika povratnika s afričkog kontinenta, jesmo li lavove možda jednostavno “precrtali” ili smo ih uvezli skupa s ostalom robom i dobrima kao živuću atrakciju? Ili… možemo li možda pretpostaviti da je nekoć davno lutao čak i europskim kontinentom?! Kolika je vjerojatnost da se zapravo cijelo vrijeme radilo o našim “autohtonim”, europskim lavovima? Pa, zapravo – poprilična. No, krenimo ispočetka. O teoriji o europskom lavu raspravljalo se desetljećima, ali dugo vremena jednostavno nije bilo dokaza koji bi je potkrijepili. Tek se zadnjih godina situacija promijenila. No, prvo jedno pojašnjenje. Razumljivo je da se europski lav često brka s europskim špiljskim lavom. Ove su vrste, međutim, potpuno različite. Konkretno, špiljski je lav klasificiran kao Panthera spelaea za razliku od ovdje predstavljanog europskog lava (Panthera leo europaea), kao i afričkih (Panthera leo) i azijskih lavova (Panthera leo persica) koji su svi, dakle, članovi porodice Panthera leo. Naime, europski se špiljski lav genetski odvojio od
5
TEHNIKA I PRIRODA
suvremenog lava još negdje tijekom srednjeg pleistocena. Smatra se da je nastanjivao veći dio sjeverne Euroazije kao i Aljasku tijekom kasnog pleistocena da bi doživio konačno izumiranje prije otprilike 12 000 godina. Ovdje, dakle, ne govorimo o (iako podjednako kultnom) špiljskom lavu, već o pravom pravcatom europskom lavu čiji je prvi fosil iskopan u južnoj Njemačkoj početkom XIX. stoljeća. Pretpostavlja se kako je star negdje između 191 000 i 57 000 godina. Nadalje, godine 1978. zooarheolozi su pronašli i fosiliziranu lavlju petu u blizini Tirinta, onog istog mjesta gdje su ispredane i drevne priče o Herkulovu nemejskom lavu! Je li to slučajnost? Svakako, mogla bi biti. Jer, stari su Grci možda zaista i uvozili lavove kao kućne ljubimce ili pak vraćali lešine kao trofeje s putovanja Afrikom. Dakle, kako bismo utvrdili konkretan dokaz o postojanju divljih lavova u Europi, morali bismo imati širi i raznolikiji skup nalaza. Što je upravo ono što smo, tijekom vremena, i dobili! Naime, kako se broj nalazišta povećavao pa su ostaci lavova pronađeni i diljem Bugarske, Mađarske, Ujedinjenog Kraljevstva, Španjolske, Italije, Portugala, Poljske, Češke i Rusije, dio je znanstvenika zaključio da je sad već riječ o prevelikom broju kostiju da bismo govorili o slučajnosti ili uvezenim lavovima. Ukupno, ostaci više od pedeset lavova pronađeni su u Grčkoj i zemljama južne Europe poput Francuske. Nadalje, u dokumentu iz 2020. navedeno je gotovo 40 lokacija na Balkanu i okolnim područjima na kojima su pronađene razne lavlje kosti u širim vremenskim intervalima. Ukratko, sad već imamo pregršt dokaza da su lavovi svojevremeno zaista lutali Europom, no što nam to govori o njihovom podrijetlu i karakteristikama? Za neke podvrste procjenjuje se kako su živjele na europskom tlu do prije 9 000 godina (u Italiji), dok su neke kosti na području Balkana stare “tek” između 3 000 i 5 000 godina. Nadalje, iako se još ne slažu oko podvrste, stručnjaci tvrde da ove kosti sasvim sigurno potječu od suvremene vrste Panthere leo dok je već spomenuti špiljski lav izumro nekih barem 6 000 godina prije životinja koje su iskopane u jugoistočnoj Europi. Fosilni nam zapisi, dakle, sugeriraju da je populacija suvremene Panthere leo nekada bila široko rasprostranjena, protežući se sve od dijelova Afrike preko Bliskog istoka do Indije. Međutim, točna ruta kojom su ove mačke dospjele u
Europu, bilo preko kopna, bilo prelas kom Bospora preko drevnog kopnenog mosta, i dalje osta je misterij. Znanstvenici zasad tek nagađaju da se određen broj lavo va jednostavno usudio zaobići Crno more u Ukrajini, kako bi se potom proširili i južnije, napredujući prema Balkanu i Grčkoj. Smatra se pritom da je europski lav bio najsličniji azijskom,
ali da su ipak postojale određene razlike zavisno o podvrsti; tako je, recimo, balkanskom i malo azijskom tipu nedostajala trbušna i bočna griva. U ramenima je bio visok 1,2 metra te težak između 180 i 200 kg, što ga pak čini sličnim afričkoj varijanti. Pretpostavljate, kao i njihovi suvremenici danas, hranili su se divljači, stokom i drugim biljojedima. Nakon svega rečenog, nije neumjesno prihvatiti tezu da su lavovi doista prebivali na našem kontinentu, no pitanje koje nam se dalje logički nameće jest i zašto su nestali?! Bojim se, iz istih razloga iz kojih su i danas ugroženi afrički, odnosno, čak krajnje ugroženi azijski lavovi! Vidite, pored same povijesne pojavnosti, znanstvenici svakako razmatraju i interakcije europskih divljih lavova s ljudima tog vremena koje, čini se, baš i nisu bile odviše prijateljske. Naime, u tom pogledu lavovi se baš i nisu razlikovali od ostalih velikih grabežljivaca u Europi, poput vukova i medvjeda, čiju su populaciju ljudi desetkovali. Tragovi posjekotina na kostima lavova iz jugoistočne Europe sugeriraju da su ljudi, izuzev pod izlikom zaštite stoke, ubijali ove životinje i za kožu, meso,


6
kao i u ritualne svrhe. Štoviše, vrlo je vjerojatno da su ljudi jeli lavlje meso, čime se daje vjerodostojnost legendarnim pričama o Ahileju, za kojeg se tvrdi da se kao dijete “gostio lavljom iznutricom”. Za tadašnje mikenske ratnike, lov i konzumacija lavljeg mesa postala je prestižna aktivnost, odnosno, način demonstriranja bogat stva i moći. I, naposljetku, ljudi su dobili rat pro tiv tada još zakonima nezaštićene Panthere leo, što je ujedno sudbina koja je zadesila ove životinje u većem dijelu njihova globalna područja. Danas su izuzetak i jedine preostale oaze lavova još samo zaštićeni rezevati u određenim dijelovima afričkog kontinenta i Indije. U svakom slučaju, lavovi starog kontinen ta preživjeli su u umjetnosti i pričama te postali snažan simbol životinjskog carstva u njegovom najiskonskijem i najinspirativnijem obliku. Njihove slike, kao što su prikazane na ukrasima, bodežima i pločama od bjelokosti iz mikenske Grčke, odjekivat će nadalje kroz kulturu sve do današnjih dana, no… upravo zahvaljujući svemu čime su nas zadužili kroz povijest i umjetnost, nije li im mjesto zapravo u prirodi, rame uz rame uz nas, umjesto (samo) na freskama? Lavovi su, kako oni u prošlosti, tako i ovi danas, baš poput mnogih drugih kopnenih i/ili vodenih vrsta (npr. morski psi) predatori. Kao predatori, iznimno su važna karika svakog ekološkog lanca jer izravno utječu na brojnost i ravnotežu ostalih populacija, a eliminirajući slabije i bolesne jedinke, osigu ravaju zdrav genetski materijal, baš kao što djeluju i kao prirodni čistači te uz strvinare izravno utječu na kontrolu zaraze. S druge strane, od pamtivjeka su stoga i čovjekovi rivali. Zbog predatorske naravi, ljudi su ih oduvijek smatrali opasnima, dok su ih istovremeno smatrali i štetočinama koje kradu i ubijaju stoku. Međutim, sve donedavno nam je promicala jedna važna činjenica: lov na stoku – a ponekad i na same ljude! – izravna je posljedica narušavanja prirodne ravnoteže od čovjeka, a ne obratno! Dok nesmiljeno širimo svoja staništa, podjednako ih nesmiljeno oduzimamo drugima. Dok gajimo stoku isključivo za svoje potrebe (pa čak i u daleko većoj mjeri od onoga što nam zapravo treba!), također istiskujemo na desetke drugih vrsta iz njihova prirodna staništa, oduzimajući im prirodne resurse poput npr. pašnjaka u korist uzgojne stoke.
A predatori rade samo ono što im je i primarna funkcija u svakom ekosustavu – svojim načinom života i svojim potrebama pokušavaju održati prirodnu ravnotežu. Ne svjesno, već instinktivno. Dakle, oboje smo predatori. Jedina razlika jest u tome što su lavovi oni prirodni, dok smo se mi od prirode odavno udaljili kroz iluziju podjele na “nas” i “njih”. Pri čemu pod “njima” smatram zapravo sve životinje. Dok imamo sve jači arsenal oružja, a elektronika nam je sad već nešto što je donedavno spadalo isključivo u zonu SF-a, malo tko od nas bi uspio preživjeti u prirodi. Štoviše, malo tko od nas bi uspio preživjeti i samim nestankon npr. električne energije! Sustav bi doslovno kolabirao. Ok, pametni smo pa smo si sve to fino složili te slažemo i dalje, dok znanost golemim koracima i brzinom svjet losti grabi naprijed. No, pritom zaboravljamo da smo stvoreni od istog materijala, krojeni od iste tkanine baš kao i sva ostala živa bića oko nas. Zaboravljamo da smo i sami dio prirode, neovisno o tome koliko smo se od nje betonom, metalom i plastkom separirali. Znanost je super, no ukoliko nastavimo gubiti vrste ovim tempom, bile one predatorske ili ne, ona nam ih neće moći supstituirati! Jer, gubitkom lava, ne gubimo “samo” lavove, već posredno s vremenom i čitav niz vrsta s kojima su oni ekološki i uzročno-posljedično vezani! Kada dođemo doma s posla ili iz škole, otvorimo bocu soka i vrećicu čipsa, lako je zaboraviti da udišemo isti kisik, tre bamo istu onu vodu te iste one nutritivne tvari biljnog i životinjskog podrijetla, koje trebaju i oni. I, usprkos trenutačnim naporima da zako nima popravimo ono što smo odavno zabrljali, odnosno, dokle god se priroda sve više svodi tek na pojedinačne rezervate od par stotinjaka hek tara – u gadnoj smo gabuli. Naime, s lavovima ili bez njih, činjenica jest da danas “prirodom” smatramo prvi park na koji naiđemo. Prirodu danas u sve većoj mjeri – skupa sa svim njenim žiteljima – čine tek nacionalni parkovi, umjesto da upravo ona dominira planetom. Sve ostalo smo mi – naše zajednice, ceste, poljoprivredna zemljišta kojima ne smije prići niti kukac, a kamoli sisavac, industrijska postrojenja, plantaže, itd. Smislili smo i izumili štošta no, krajnje je vrijeme da smislimo i održiv sustav za zajednicu u kojoj ćemo moći obitavati svi bez da činimo štetu onima od kojih, na posljetku, izravno ovisi i naš vlastiti opstanak. To, međutim, ne možemo
7
postići bez dubljeg razumijevanja svijeta oko sebe, temeljenog ne samo na znanostima poput biologije, fizike i kemije, već i na empatiji. Koliko god da vam se činio strašnim lav, vuk ili medvjed, zapitajte se – što biste vi učinili na njegovu mjestu? Najbolji način razumijevanja prirode, vjerujte mi, nisu samo knjige već izravna iden tifikacija. Želite li upoznati neku životinju, samo se zapitajte što joj, iz perspektive te vrste, treba, gdje živi, čime se hrani i koji su joj, sukladno
BBC micro:bit [33]
Poštovani čitatelji, u prošlom ste nastavku započeli s programiranjem u MicroPythonu gdje ste upoznali kodove koji se koriste za upravljanje LED-displejom BBC micro:bita. Radi vježbanja, na kraju članka predložen je zadatak za samostalan rad. Predloženo je da ponuđeni program prepravite tako da se LED-ice redom pale okomito, a ne vodoravno. Osim toga, traženo je da se program beskonačno ponavlja. U nastavku proučite rješenje, Slika 33.1.
Ako usporedite ovaj program s onim ponuđenim (Slika 32.13. u prošlom broju ABC tehnike) primijetit ćete da je za udovoljavanje zahtjevu prestrojavanja redaka i stupaca dovoljno da svim promjenljivima zamijenite imena, x umjesto y te y umjesto x. Za zadovoljavanje drugog zahtjeva, potrebno je sve naredbe obuhvatiti petljom while True kako bi se program neprekidno ponavljao.
Zvučnik (speaker) v.2.
Kako je u pretprošlom nastavku serije rečeno, zvučnik BBC micro:bita v.2. nalazi se na poleđini pločice. Prema predodređenim postavkama generirani signal zvuka bit će dostupan kako na tom ugrađenom zvučniku tako i na izvodu
tome, prioriteti. Što ukoliko više nema staništa, što ukoliko je primorana živjeti i zalaziti u ljudske sredine? Što će jesti, gdje će se sakriti… Pokušajte! Zabavno je i nadasve edukativno! Ali, najvažnije, izvrstan je alat za gradnju jednog sasvim novog dijaloga između vrsta, kao i za gradnju mostova razumijevanja i tolerancije. Taj most upravo ste Vi!
Ivana Janković, Croatian Wildlife Research and Conservation Society
KODIRANJE
Slika 33.1. Rješenje zadatka iz prošlog nastavka serije
Slika 33.2. Naredbe za uključivanje/isključivanje ugrađenog zvučnika
P0 rubnog priključka. Radi biranja predviđen je programski kôd kojim se ugrađeni zvučnik može uključiti/isključiti, speaker.on() i speaker.off(). U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.2.
Ako između P0 i GND priključite vanjski zvučnik čut ćete zvuk HAPPY na oba zvučnika, a zvuk MYSTERIOUS samo na vanjskom zvučniku. Napomena! Predložene zvukove pronaći ćete u padajućem izborniku, Slika 33.3.
Softverski je moguće ugoditi i volumen zvuka programskim kodom set_volume(broj), gdje broj mora biti u rasponu od 0 do 255, 0 – potpuno utišan zvuk, a 255 – maksimalan volumen zvuka. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.4.

U ovom se programu koristi petlja for koja u zagradi ima tri parametra. Prvi parametar je broj 0 koji označava početak brojanja, srednji parametar je broj 260 koji označava kraj brojanja, a treći parametar je broj 10 koji označava dužinu koraka. Drugim riječima, brojanje će ići od 0 do 250 u koracima po 10, odnosno 0, 10, 20, 30, 40… 230, 240, 250 (posljednji broj 260 ne uzima se u obzir, već ukazuje petlji for da je dosegla

8
Slika 33.3. Primjere zvukova potražite u padajućem izborniku koji se pojavljuje nakon upisivanja točke iza argumenta “Sound”, a prepoznat ćete ih jer su upisani velikim slovima
kraj). Isti ti brojevi koriste se kao parametri za volumen zvuka gdje se od maksimalnog volumena 255 oduzima trenutni broj x iz petlje for. Drugim riječima, dobivaju se vrijednosti 255, 245, 235, 225… 25, 15, 5.
Ima toga još! Kod audio.play se osim Sound može koristiti i SoundEffect
Zvučni efekt (SoundEffect)


Slika 33.4. Ugađanje volumena zvuka
Slika 33.5. Zvučni efekt
Zove se efekt jer je stvarno učinkovit, ali i zabavno dojmljiv. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.5.
Ovo će pokrenuti određeni zvučni efekt. Sastoji se od argumenta s raznim predodređenim parametrima koje možete vidjeti na Slici 33.6.
Unutar zagrada svi se navedeni parametri argumenta mogu mijenjati, pojedinačno ili više njih odjednom. U MP Editoru prepišite te otpremite i isprobajte program koji prikazuje izmjenu samo jednog parametra, Slika 33.7.
Što se ovom preinakom dobilo? Umjesto 0,5 sekundi isti zvučni efekt sada traje 6 sekundi.
Slika 33.7. Promjenom vrijednosti bilo kojeg parametra mijenja se zvučni efekt
U Tablici na Slici 33.8. možete pronaći objašnjenja za sve parametre.

PARAMETRI OBJAŠNJENJA
freq start Zvučni efekt započinje frekvencijom koju valja ugoditi od 0 do 9999 hertza (Hz). freq end Zvučni efekt završava frekvencijom koju valja ugoditi od 0 do 9999 hertza (Hz). vol start Zvučni efekt započinje volumenom zvuka kojega valja ugoditi od 0 do 255. vol end Zvučni efekt završava volumenom zvuka kojega valja ugoditi od 0 do 255. duration Vremensko trajanje zvučnog efekta koje valja ugoditi od 0 do 9999 milisekundi (ms). waveform Oblik vala zvučnog efekta. Moguće je izabrati: sinusni val, pilasti val, trokutasti val, kvadratni val i nasumično generiranu buku. fx
Specijalni efekt koji valja dodati zvučnom efektu. Moguće je izabrati: tremolo, vibrato, cvrkut i bez specijalnog efekta. shape Oblik krivulje izvođenja između početne i završne frekvencije. Moguće je izabrati: linearno izvođenje, izvođenje u obliku neke krivulje i logaritamsko izvođenje.

Slika 33.8. Tablica s popisom parametara zvučnog efekta
Slika 33.6. Na slici je vidljivo što se sve može ugađati i kako je to učinjeno u određenom zvučnom efektu
9
Slika 33.9. Kod svake promjene parametara dobiva se novi, drugačiji zvučni efekt
Teško je riječima opisati što se sve može dobiti, najbolje da sami isprobate neke mogućnosti. U MP Editoru prepišite te otpremite i isprobajte program u kojemu su svi parametri određenog zvučnog efekta izmijenjeni, Slika 33.9.
Zvuk (sound) v.1. i v.2.

BBC micro:biti v.1. i v.2. mogu reproducirati melodije, pa čak i govoriti. Naravno, ako koristite BBC micro:bit v.1. onda najprije priključite vanjski zvučnik između P0 i GND. Da biste koristili glazbene značajke, na samom početku programa morate uvesti modul koji sadrži biblioteku glazbe. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.10.

U toj biblioteci možete pronaći pripravnu glazbu. U padajućem izborniku dobivate cijeli popis čim napišete točku (.) iza argumenta “music”, u ovom je primjeru izabrano DADADADUM.
Pjesmu možete lako i sami komponirati jer svaka nota ima naziv, oktavu kojoj pripada i vrijeme trajanja.
Iz glazbene kulture poznati su vam nazivi nota, Do, Re, Mi, Fa, So, La i Ti, no ovdje se koriste anglosaksonski nazivi pa je to, c, d, e, f, g, a i b U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.11.
Notni zapis mora biti u uglatim zagradama jer je to popis, a sve to skupa u oblim zagradama
Slika 33.10. BBC micro:bit reproducira predodređenu melodiju
Slika 33.11. Način pisanja nota
jer se tako pišu argumenti. Note se upisuju unutar navodnika, a međusobno su odvojene zarezom. Prema predodređenim postavkama iz biblioteke “music ”, note koje na ovaj način zapišete pripadaju četvrtoj oktavi.
Oktava je glazbeni interval, odnosno razmak ili udaljenost između svake osme note u nizu gdje ona sljedeća viša nota ima dvostruko višu frekvenciju. Na primjer, središnja nota La (odnosno – a) ima frekvenciju od 440 Hz, sljedeća nota La koja je za oktavu viša ima frekvenciju od 880 Hz, a ona ispod koja je za oktavu niža ima frekvenciju 220 Hz. Ljudsko uho ima sklonost da dvije note odvojene oktavom čuje kao da su iste note, radi toga note iz raznih oktava imaju ista imena. Da bi ih se ipak razlikovalo i prozvalo valja dodati oznaku oktave. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.12.
Slika 33.12. Način prozivanja oktava Broj oktave se piše uz oznaku note. Jednom prozvana oktava važi za sve note koje slijede, odnosno prenosi se dalje sve dok se ne upiše broj neke druge oktave. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.13.
Slika 33.13. Jednom prozvana oktava prenosi se dalje na note koje slijede
Vrijeme trajanja note određeno je na 4, no moguće ga je ugađati upisivanjem broja iza dvotočke. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.14.
Slika 33.14. Vrijeme trajanja note upisuje se iza dvotočke
“c3:1” proziva notu c iz treće oktave (3) gdje joj je određeno najkraće trajanje (:1). Zatim se proziva ista nota (“c”) bez ikakvih promjena jer poprima parametre koji su preneseni dalje iz prethodne note.
“r:2” nije nota, već pauza (dolazi od riječi rest što na engleskom znači – odmoriti, počivati) koja će trajati duplo duže (:2) od prethodne note. Slijede dvije uzastopne note “c” koje će trajati
10
duplo duže od prethodnih jer je kod pauze (r) promijenjeno vrijeme trajanja koje se prenosi dalje.
“r:4” je nova pauza (r), ali duplo duža od prethodne. Slijede dvije uzastopne note “c” koje će trajati duplo duže od prethodnih jer je kod pauze promijenjeno vrijeme trajanja (:4).
BBC micro:bit može svirati i zvuk koji se određuje upisivanjem frekvencije, no tada je vrijeme trajanja neograničeno pa ga u prikladnom trenutku treba znati prekinuti. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.15.
Određenoj melodiji koja se izvodi možete odrediti tempo, odnosno ritam. Tempo je brzina izvođenja glazbe. Kod orkestra se za tempo brine dirigent, a kod pop-muzičara izvođač ritamskog glazbala, na primjer bubnjar. Za mjerenje tempa koristi se metronom s njihalom koji otkucava zvučnim signalom broj njihanja u minuti. Wikipedija kaže da je tempo vrlo važan element svake skladbe, jer bitno utječe na težinu izvođenja i karakter djela, ali i na doživljaj slušatelja. Predodređena vrijednost tempa u biblioteci “music” je 120 (otkucaja njihala metronoma u minuti). Kako biste doživjeli različite osjećaje zbog različitog tempa, poslušajte kako zvuči pogrebna melodija. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.18.
Slika 33.15. Zvuk određen frekvencijom
U ovom će se programu zvuk od 440 Hz odvijati istovremeno s animacijom. Kad animacija završi, zvuk se prekida s naredbom music.stop(), no može i drugačije. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.16.

Slika 33.16. Parametri određuju frekvenciju (440 Hz) i trajanje (1000 ms) zvuka
Argument u zagradi, osim parametra za frekvenciju sadrži i parametar vremena trajanja u milisekundama.
Kao argument možete koristiti i očitavanja s raznih osjetila BBC micro:bita. U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.17.



Slika 33.18. Pogrebna melodija izvedena različitim tempom
Melodija FUNERAL (pogreb, sprovod), kad se izvodi uobičajenim tempom asocira na nešto sumorno. Ako tempo usporite na bpm =80 raspoloženje dodatno opada, postaje tmurnije. Suprotno tome, kad tempo ubrzate na bpm=160 melodija postaje vedrija, skoro pa zabavna, zar ne?
Slika 33.17. Frekvencija generiranog zvuka ovisi o očitanju osjetila svjetlosti
U ovom se programu frekvencija zvuka određuje prema brojevima koji se dobivaju sa osjetila svjetlosti BBC micro:bita. Kad LED-displeju BBC micro:bita približite neko svjetlo, frekvencija zvuka se povisuje. Podsjetnik, BBC micro:bit koristi nekoliko LED-ica LED-displeja kao osjetilo svjetlosti.
Naoružani svim ovim znanjem mogli biste programirati neku poznatu melodiju. Kako ćete to učiniti? Najjednostavnije je da na internetu pronađete notni zapis željene melodije pa ga pretvorite u note koda. Primjer: “Bratec Martin”, Slika 33.19.

U MP Editoru prepišite te otpremite i isprobajte program, Slika 33.20.
Slika 33.20. Melodija “Bratec Martin”
11
Zadatak za samostalan rad. Ako želite vježbati onda na internetu pronađite notni zapis pjesme “Jingle Bells”. Tu pjesmicu kodirajte u MP Editoru te ju otpremite i poslušajte.
Kad se govorilo o zvučnim efektima spomenuti su razni oblici valova – waveform. Što je to?





Oblici valova
U elektronici postoje oscilatorni sklopovi koji generiraju razne signale koji se načelno dijele na analogne signale i digitalne signale.
Analogni signali definirani su kao signali čiji se napon postepeno povisuje, odnosno koji počinju od vrijednosti 0 volti te postepeno dosežu svoju maksimalnu vrijednost i nakon toga postepeno snižavaju na 0 volti. Tu spadaju sinusni valovi, trokutasti valovi i pilasti valovi, Slike 33.21. – 33.23.
Slika 33.23. Isto važi i za valove pilastog oblika jer postepeno dosežu svoju maksimalnu vrijednost, iako naglo padaju prema minimalnoj vrijednosti
Iz ovoga proizlazi da su na primjer, napon gradske mreže od 230 V kao i svi signali niske frekvencije dobiveni iz mikrofona ili pojačala analogni signali.
Digitalni signali definirani su kao signali čiji napon naglo prelazi iz 0 volti do svoje maksimalne vrijednosti napona, a zatim se naglo vraćaju na svoju minimalnu vrijednost od 0 volti. Valovi kvadratnog oblika spadaju u digitalne signale, Slika 33.24.
Slika 33.21. Valovi sinusnog oblika koji postepeno rastu prema svom maksimumu i postepeno opadaju prema svom minimumu jesu signali analognog tipa
Slika 33.24. Samo valovi kvadratnog oblika koji naglo prelaze iz svoje minimalne vrijednosti do svoje maksimalne vrijednosti i obrnuto, nazivaju se – digitalni signali
Slika 33.22. Valovi trokutastog oblika također spadaju u analogne signale jer postepeno dosežu svoju maksimalnu i minimalnu vrijednost
Dvije krajnje vrijednosti digitalnog signala, odnosno minimalna vrijednost od 0 volti i maksimalna vrijednost, definirani su kao logičke razine. U informatici se te dvije razine obilježavaju s L i H od engleskog Low i High (nisko i visoko). Ponekad se umjesto L koristi broj 0, a umjesto H broj 1: Low > niska logička razina = 0 volti, High > visoka logička razina = maksimalna vrijednost napona.
12
Slika 33.19. Melodija “Bratec Martin”. Prilikom kodiranja treba pripaziti jer se melodija proteže kroz dvije oktave
S ova četiri spomenuta vala bi se kod istog generiranog tona trebala čuti neka razlika u zvuku, a to ste imali prilike isprobati kad ste mijenjali parametar “waveform” u argumentu “soundeffect”. Nažalost, razlika nije jako izražena, to je vjerojatno tako jer digitalan BBC micro:bit ne može generirati prave analogne signale, može ih samo simulirati. Za utjehu, najučinkovitija se promjena čuje kad se upiše WAVEFORM_NOISE (nasumično generirana buka).
Podsjetnik: from microbit import sleep > uvoz samo jedne naredbe iz biblioteke microbit, u ovom slučaju sleep; import music > uvoz biblioteke; music.play(music.IME) > generiranje pripravne melodije; music.play([„NOTAoktava:trajanje“, „r“]) > generiranje vlastite melodije. NOTA se upisuje unutar navodnika, velikim ili malim slovom. R je pauza. Kod “oktava” upisati broj oktave. Za “trajanje” (note i pauze) upisati broj nakon dvotočke. Note i pauze odvajati zarezom. Jednom definirana, oktava i trajanje note (i pauze) prenosi se dalje na sljedeću notu (i pauzu); music.pitch(frekvencija, milisekunde) > generiranje zvuka upisivanjem frekvencije. Ako se ne upiše parametar vremena, zvuk se generira neprekidno; music.stop() > zaustavljanje zvuka kad je generiran bez parametra vremena trajanja; music.set_tempo(bpm=milisekunde) > određivanje tempa, predodređena vrijednost je 120; speaker.on() > samo v.2, uključuje ugrađeni zvučnik na BBC micro:bitu; speaker.off() > samo v.2, isključuje ugrađeni zvučnik na BBC micro:bitu; audio.play(Sound.IME) > samo v.2, generiranje pripravnog zvuka; audio.play(audio.SoundEffect()) > samo v.2, generiranje zvučnog efekta, parametre pogledati u Tablici 33.8.; set_volume(broj) > samo v.2, ugađanje volumena zvuka od 0 do 255. Za ove ste vježbe trebali: - BBC micro:bit v.2. (ili v.1.)
- USB-kabel - zvučnik - dvije žice s krokodil-štipaljkama. Marino Čikeš, prof.
Robotski modeli za učenje
kroz igru u STEM-nastavi –Fischertechnik (51)
Ultrazvučni senzor je elektronički modul koji mjeri udaljenost do nekog objekta, predmeta ili prepreke. Detekcija prepreke je iznimno precizna, gdje senzor detektira predmet i očitava udaljenost od 2 do 400 centimetara.
Modul ultrazvučnog senzora udaljenosti građen je kao dvostruki ultrazvučni zvučnik za prepoznavanje prepreka na relativno maloj udaljenosti. Preciznost senzora se očitava na udaljenosti od 1 cm primljenog signala dvosmjernog digitalnog sučelja s rezolucijom od 0,5 cm. Moguće je istovremeno upotrebljavati do osam senzora za mjerenje udaljenosti koji neovisno odašilju digitalne podatke u sučelje (međusklop) bez međusobne interferencije signala. Radni napon napajanja senzora udaljenosti ima raspon od 5 do 10 volti i osigurava stabilan rad senzora udaljenosti.
Ultrazvučni senzor čeka impuls okidača i vrši sinkronizaciju svih ostalih senzora gdje se upit hostu ponavlja u periodu 10 milisekundi. Kada se signal vraća kao impuls odgovor stiže u periodu od 0,2 do 1 ms.
Ako senzor udaljenosti ne detektira prepreku, glavni okidač ne šalje digitalni signal i senzor prelazi u stanje pripravnosti. Pripravnost senzora traje do trenutka kada senzor detektira prepreku i odašilje digitalne signale u sučelje.
LED (Light Emitting Diode) je poluvodički elektronički element koji pretvara električni signal u svjetlost. Propusno polarizirana svjetleća dioda (LED) emitira elektromagnetsko zračenje koje uzrokuju nosioci električnoga naboja. Elektroni su negativno nabijene čestice koje oslobađaju energiju u obliku topline i optičkog zračenja prelazeći iz vodljivog u valentni pojas. Boja emitiranog svjetla ovisi o poluvodičkom materijalu i primjesama u njemu te varira od infracrvenog preko vidljivog do ultraljubičastog dijela optičkog spektra.
Slika 1._UZV
Izradu konstrukcije modela koji mjeri udaljenost osigurava odabir osnovnih elemenata i građevnih blokova Fischertechnika. Odabir
13 "STEM"
U NASTAVI
građevnih blokova i električnih elemenata olakšava izradu funkcionalnog modela pomoću strojne opreme za učenje računalnog razmišljanja uz izradu algoritama i programskih rješenja.
Senzor za mjerenje udaljenosti (UZV)
Konstrukcija modela za mjerenje udaljenosti: povezivanje vodičima s međusklopom, provjera rada električnih elemenata i izrada programskog rješenja za pokretanje senzora udaljenosti (UZV), osam lampica i dva tipkala.
Izradu funkcionalne konstrukcije modela osigurava popis elemenata Fischertechnika s preciznim uputama i detaljnom razradom radnih postupaka.
Slika 2._FT_elementi1
Izradit ćemo model za mjerenje udaljenosti od prepreke sa osam LED-lampica i upravljačkim elektroničkim sklopom (sučeljem), senzorom za mjerenje udaljenosti i tipkalima (I1 i I2).
Konstrukcijski izazov pri izradi modela je pozicioniranje senzora udaljenosti i LED-lampica na jednaku udaljenost, pregledno i uredno povezivanje osam lampica s vodičima i međusklopom.
Faze izrade konstrukcije robotskog modela:
• izrada nosača i postavljanje senzora udaljenosti (UZV)
• postavljanje indikatora udaljenosti s LED-lampicama na postolju
• postavljanje upravljačkih elemenata (tipkala)
• povezivanje električnih elemenata vodičima, sučeljem i izvorom napajanja
• izrada algoritama i računalnog programa s potprogramima za upravljanje.
Napomena: Duljina vodiča sa spojnicama određena je udaljenošću električnih elemenata (LED-lampica) od sučelja. Poziciju sučelja na modelu određuje položaj ulazno/izlaznih utora (spojnica) na sučelju u odnosu na električne elemente i senzore, te položaj izvora napajanja (baterija, U = 9 V).
Mjerenje udaljenosti – konstrukcija automatiziranog modela
Izradit ćemo automatizirani model za određivanje udaljenosti pomoću LED-lampica (O1–O8), dodirnih senzora tipkala (I1, I2) i upravljačkog sklopa sa senzorom udaljenosti (I8).
Konstrukcijski/inženjerski izazovi: građevin skim elementima izraditi funkcionalnu konstruk ciju nosača senzora udaljenosti na postolju sa svjetlosnim indikatorima (LED-lampicama), električne elemente povezati vodičima, sučeljem, izvorom napajanja i računalom.
Slika 3._konstrukcijaA
Slika 4._konstrukcijaB
Slika 5._konstrukcijaC
U četvrti red cijelom dužinom postavite senzor udaljenosti i svjetlosne LED-indikatore. S lijeve strane na veliko postolje postavite nosač, veliki crni građevni element na koji je pričvršćen senzor udaljenosti.
U isti red postavite osam postolja za LED-lampice na jednaku udaljenost (izmjerite ravna lom). Umetnite u postolja svjetleće diode (LED) i pozicionirajte ih tako da su okrenute isto (katoda lijevo, anoda – desno).
Na postolja LED-lampica postavite zaštitne kapice u bojama: tri crvene, dvije narančaste i tri zelene.
Napomena: Položaj i orijentacija posto lja LED-lampica olakšavaju spajanje i provje ru ispravnosti vodiča. Zaštitne kapice na LED-lampicama su crvene, narančaste i zelene boje radi bolje vidljivosti indikacije udaljenosti očita nja senzora.
Slika 6._konstrukcijaD
Slika 7._konstrukcijaE
Slika 8._konstrukcijaF
Na kraju desne strane postolja u osmi red umetnite veliki crni građevni element koji osigurava nepomičnost izvora napajanja i olakšava jednostavnu zamjenu baterije kada je prazna.
Nasuprot baterije postavite sučelje na dvostrane spojne elemente koji su umetnuti na postolje s jedne strane i sučelje s druge strane. Ovim rasporedom na postolju je osiguran optimalan položaj za povezivanje električnih elemenata s vodičima na sučelje i jednostavno spajanje izvora napajanja sa sučeljem.
Napomena: Položaj sučelja definiran je različitim priključcima koji su smješteni na prednjoj strani. Oni omogućavaju povezivanje s računalom i komunikaciju između sučelja i računala s LED-indikatorima, dodirnim senzorima i senzorom udaljenosti.
Slika 9._konstrukcijaG
Slika 10._konstrukcijaH
14
Slika 11._konstrukcijaI
LED-indikatori u bojama (crvena, narančasta, zelena) ističu različitu jačinu svjetlosti i upozoravaju na približavanje objekta senzoru udaljenosti.
U četvrti red umetnite četiri crvena držača za vodiče u obliku potkove (vodilice). Osam LED-lampica spojite vodičima sa spojnicama na sučelje. Postavite LED-lampice u poziciju za spajanje sa spojnicama i umetnite ih u vodiče. Odredite pravilan redoslijed spajanja i izmjerite duljinu vodiča.
Izrežite vodiče na izmjerene duljine, skinite izolaciju na krajevima, umetnite ih u spojnice i stegnite čvrsto vijak pomoću odvijača.
Napomena: Vodiči smješteni unutar vodilica olakšavaju pregledno i pravilno spajanje LED-lampica, osiguravaju urednost i preglednost vodljivih elemenata spojenih na sučelje.
Napomena: LED-lampice spojite zajedničkim vodičem na uzemljenje sučelja tako da najbližu lampicu (O1) spojite direktno na uzemljenje. LED-lampica (O1) s uzemljenjem serijski je povezana s ostalim LED-lampicama (O2-O8). Ovakvim načinom povezivanja LED-lampica na zajedničko uzemljenje smanjujemo broj vodiča na konstrukciji i sučelju.
Slika 12._konstrukcijaJ
Slika 13._konstrukcijaK
Ultrazvučni senzor spojite sa sučeljem u ulazne utore pazeći na raspored boja vodiča: I8 (crna), uzemljenje (┴, zelena), izlaz 9 V (+, crvena). Dodatno napajanje ultrazvučnog senzora omogućava kontinuiran i pravilan rad pri očitavanju udaljenosti od prepreke.
Napomena: sve elektroničke elemente povezujemo prije spajanja izvora napajanja (baterije).
Bočno su na sučelje umetnuta dva tipkala (I1 i I2) koja osiguravaju kontinuirano upravljanje automatiziranim modelom za mjerenje udaljenosti od prepreke. Položaj dodirnih senzora (tipkala) definiran je pozicijom digitalnih ulaza na sučelju.
Napomena: postavite izvor napajanja (bate riju) i sučelje na podlogu i povežite ih uredno složenim vodičima s računalom. Ulazne i izlazne električne elemente povežite sa sučeljem i testi rajte alatom u programu RoboPro.
Slika 14._TXT
Slika 15._FT_elementi2
Spajanje FT-elemenata s TXT-sučeljem:
• LED-lampice spojite na (O1–O8) izlaze (crveno) i uzemljenje ( ┴, zeleno)
• ultrazvučni senzor spojite vodičima na digitalni ulaz (I8)
• tipkala spojite vodičima na digitalne ulaze (I1 i I2).
Povezivanje sučelja i električnih elemenata olakšava pravilan raspored boja spojnica vodiča, uredno spajanje vodiča i precizna duljina vodiča između LED-lampica.
Napomena: sve elektroničke elemente povežite prije spajanja izvora napajanja (baterije).
Provjera ispravnosti elektroničkih elemenata provodi se prije izrade algoritma i programa pomoću alata Test:
• povezivanje TXT-sučelja s računalom, ulaznim i izlaznim elementima
• provjera komunikacije TXT-sučelja s računalom (USB, Bluetooth, Wi-Fi) s izvorom napajanja (baterijom U = 9 V)
• provjera rada spojenih elemenata: senzora udaljenosti, tipkala i LED-lampica s programom RoboPro.
Izrada algoritama i programskih rješenja
Slika 16._UZV1
Zadatak_1: Izradi algoritam i dijagram tijeka (program) koji omogućava upravljanje, pokretanje i isključivanje LED-lampice tipkalom (I1). Na početku program provjerava izlaz na koji je spojeno tipkalo (I1) i očitano stanje na tipkalu (I1). Pritiskom na tipkalo (I1) i otpuštanjem tipkala (I1) ultrazvučni senzor provjerava udaljenost od objekta (prepreke). LED-lampica (O1) svijetli u periodu od jedne sekunde, ako senzor izmjeri udaljenost koja je veća od ili jednaka 10 centimetara.
Slika 17._UZV_Test
Pokretanjem programa tipkalom (I1) kontroliramo rad ultrazvučnog senzora (I8). Program provjerava ispravnost i preciznost očitanja udaljenosti od objekta i nakon toga prestaje raditi.
Zadatak_2: Izradi algoritam i dijagram tijeka (program) koji omogućava upravljanje, pokretanje i isključivanje LED-lampice tipkalom (I1). Na početku program provjerava izlaz na koji je spojeno tipkalo (I1) i očitano stanje na tipkalu
15
(I1). Pritiskom na tipkalo (I1) i otpuštanjem tipkala (I1) ultrazvučni senzor provjerava udaljenost od objekta (prepreke). LED-lampica (O1) svijetli u periodu od jedne sekunde, ako senzor izmjeri udaljenost koja je veća od ili jednaka 10 centimetara. Ako je udaljenost manja od 10 centimetara, LED-lampica ne svijetli. Program konstantno provjerava tipkalo (I1) i neprekidno očitava udaljenost od objekta dok ne zaustavimo izvršavanje programa.
Slika 18._UZV_On_Off
Uključivanje i isključivanje LED-lampice definirano je očitanom udaljenosti na ultrazvučnom senzoru.
Zadatak_3: Izradi algoritam i dijagram tijeka (program) koji omogućava upravljanje, pokre tanje i isključivanje LED-lampice tipkalima (I1, I2). Na početku program provjerava izlaz na koji je spojeno tipkalo (I1) i očitano sta nje na tipkalu (I1). Pritiskom na tipkalo (I1) i otpuštanjem tipkala (I1) ultrazvučni senzor provjerava udaljenost od objekta (prepreke). LED-lampica (O1) svijetli u periodu od jedne sekunde, ako senzor izmjeri udaljenost koja je veća od ili jednaka 10 centimetara. Ako je udaljenost manja od 10 centimetara, LED-lampica ne svijetli. Program konstantno pro vjerava očitanu udaljenost na ultrazvučnom senzoru (I8) i uključuje ili isključuje LED-lampicu neprekidno dok nije pritisnuto tipkalo (I2) koje zaustavlja izvršavanje programa.
Slika 19._UZV
Tipkalom (I2) nepovratno zaustavljamo izvršenje programa koji upravlja očitanjem udaljenosti od objekta.
Zadatak_4: Izradi algoritam i dijagram tijeka (program) koji omogućava upravljanje, pokretanje i isključivanje LED-lampice tipkalima (I1, I2). Na početku program provjerava izlaz na koji je spojeno tipkalo (I1) i očitano stanje na tipkalu (I1). Pritiskom na tipkalo (I1) i otpuštanjem tipkala (I1) ultrazvučni senzor provjerava udaljenost od objekta (prepreke). LED-lampica (O1) svijetli u periodu od jedne sekunde ako senzor izmjeri udaljenost koja je veća od ili jednaka 10 centimetara. Ako je udaljenost manja od 10 centimetara, LEDlampica ne svijetli. Program konstantno provjerava očitanu udaljenost na ultrazvučnom senzoru (I8) i uključuje ili isključuje LED-lampicu neprekidno dok nije pritisnuto tipkalo (I2).
Pritiskom tipkala (I2) program čeka ponovno pokretanje kao na početku provjerom pritiska i otpuštanja tipkala (I1).
Slika 20._UZV1
Aktiviranjem programa i očitanjima ultrazvučnog senzora svjetlosni indikator (LED) pokazuje udaljenost veću, jednaku ili manju od 10 centimetara.
Slika 21._UZV2
Pritiskom tipkala (I2) LED-lampica prestaje svijetliti bez obzira na prethodno stanje očitane udaljenosti.
Zadatak_5: Izradi algoritam i dijagram tijeka (program) koji omogućava upravljanje, pokretanje i isključivanje LED-lampice tipkalima (I1, I2). Na početku program provjerava izlaz na koji je spojeno tipkalo (I1) i očitano stanje na tipkalu (I1). Pritiskom na tipkalo (I1) i otpuštanjem tipkala (I1) ultrazvučni senzor provjerava udaljenost od objekta (prepreke). LED-lampica (O1) svijetli u periodu od jedne sekunde ako senzor izmjeri udaljenost od dva centimetra. Ako je udaljenost četiri centimetra LED-lampica ne svijetli. Program konstantno provjerava očitanu udaljenost na ultrazvučnom senzoru (I8) i uključuje ili isključuje LED-lampicu neprekidno dok nije pritisnuto tipkalo (I2) koje zaustavlja izvršenje programa.
Slika 22._UZV3
Uključivanje LED-indikatora postiže se ispunjavanjem uvjeta i preciznim očitanjem udaljenosti ultrazvučnog senzora.
Zadatak_6: Izradi algoritam i dijagram tijeka (program) koji omogućava upravljanje, pokreta nje i isključivanje LED-lampica (O1-O8) tipkali ma (I1, I2). Na početku program provjerava izlaz na koji je spojeno tipkalo (I1) i očitano stanje na tipkalu (I1). Pritiskom na tipkalo (I1) i otpušta njem tipkala (I1) ultrazvučni senzor provjerava udaljenost od objekta (prepreke) i uključuje svje tlosne indikatore (LED) ovisno o očitanoj udalje nosti. Senzor mjeri udaljenost od objekta svaka dva centimetra koju prikazuje uključivanjem i isključivanjem svjetlosnih indikatora.
Primjer: LED-lampica (O1) svijetli u periodu od jedne sekunde ako senzor izmjeri udalje nost dva centimetra. LED-lampica (O2) svijetli u periodu od jedne sekunde ako senzor izmjeri udaljenost četiri centimetra. Ukupno je maksi malno moguće izmjeriti udaljenost do šesnaest centimetara koju prikazuje LED-lampica (O8).
Nastavak na 24. stranici
16
MALA ŠKOLA FOTOGRAFIJE
CAMERA OBSCURA treći dio
Obojali smo unutrašnjost kutije od cipela crnim mat sprejem i izrezali smo kvadratni otvor veličine 1,5 x 1, 5 cm na sjecištu dijagonala dubljeg dijela kutije. Izbušili smo i rupicu u tankom limu. Sada ćemo dovršiti našu cameru obscuru montiranjem lima s rupicom i izradom zatvarača.




Kada izbušimo rupicu, možemo je kontro lirati pomoću povećala. Ja to redovito radim i to je jedna od mogućnosti da se poprave eventualne greške ili nedostatci. Na slikama iznad ovoga teksta vidi se kako je rupica skoro savršeno okrugla. Napravljena je na metalnoj foliji kojima bude omotan vrh boca od vina ili nekoga drugog pića. Pokazao sam
primjer s ovim limom jer je dostupan svima. Sad ovaj probušeni limić, koji je srce naše camere obscure, trebamo učvrstiti s unutraš nje strane kutije na mjesto izrezanog kvadrata. Ovaj limić učvršćujemo pomoću električarske, crne izolir-trake. Koristim je stoga što je crna, a može se i krep-trakom, odnosno papirnatim selotejpom, samo ga onda treba pobojiti crnom bojom jer je on najčešće žućkaste ili krem boje. Kod učvršćivanja limića moramo voditi računa da nam rupica bude u centru izrezanoga kvadrata na kutiji, kako to pokazuje slika lije vo od ovoga teksta. Kada smo zalijepili limić, idemo na izradu zatvarača naše camere obscure. Napravi se vrlo jednostavno od
Piše: Borislav Božić, prof.
tri kartončića. To pokazuje slika desno od ovoga teksta. Elemente izrežemo od dvo milimetarskog kartona tako da je element A istih dimenzija kao i element B. Oni se spoje ljepilom, zatim se zalijepe elemen tom A za našu kutiju, tj. cameru obscuru na način da izrezani kvadrat elementa B točno obuhvati izrezani kvadrat na kutiji gdje je naš limić s rupicom. I sada samo umetnemo kartončić C u utor i pomičući ga lijevo i desno, mi ustvari otvaramo i zatvaramo rupicu na kutiji kako to poka zuju slike ispod ovoga teksta.



Evo naše camere obscure napravlje ne od kutije za cipele. Sve je spremno da krenemo na teren i fotografiramo. No, prije toga ponovimo ukratko što smo sve uradili kako bismo priredili običnu kutiju u neobični fotoaparat. Unutrašnjost kutije obojili smo mat crnom bojom, izrezali smo kvadrat veličine 1,5 x 1,5 cm na dubljem dijelu kutije. Nakon toga izbušili smo rupicu iglom za šivanje na komadu tankoga lima. Učvrstili smo komad lima s unu trašnje strane crnom električarskom izolir-trakom. Od tri kartončića napra vili smo zatvarač kojim kontroliramo vrijeme osvjetljavanja fotopapira. Sve je spremno i u sljedećem nastavku fotografiramo.


















”STEM” U NASTAVI Robotski modeli za učenje kroz igru u STEM-nastavi – Fischertechnik PRILOG ČASOPISA “ABC tehnike” BR. 3 (659), ŠK. GOD. 2022./2023. Slika 1. Slika 2. Slika 3. Slika 4. Slika 5. Slika 7. Slika 10. Slika 11. Slika 8. Slika 16. Slika 18. Slika 9. Slika 15. Slika 6. Slika 12. Slika 14. Slika 13.
Slika 17.
Slika 19.
Slika 23.
Slika 21.
Slika 24.






Slika 20.
Slika 22.
PRILOG ČASOPISA “ABC tehnike” BR. 3 (659), ŠK. GOD. 2022./2023. ”STEM” U NASTAVI Robotski modeli za učenje kroz igru u STEM-nastavi – Fischertechnik
POGLED UNATRAG
CAMERA OBSCURA KAO ZABAVA

U 19. stoljeću izrađuju se posebne, velike camere obscure u obliku šatora ili je to staci onarni tvrdi objekt kao prostor zabave i atrakcije. Postavljane su na frekventnim mjestima kako bi gospoda u šetnji imala dodatni sadržaj zabave. U sredini i na vrhu stožastog krova najčešće se konstruirao pomični, valjkasti dio sa zrcalom pod kutom od 45 stupnjeva i preko kojeg se slika projicirala na stol u sredini šatora ili prostorije. Kako bi slika bila jasnija i oštrija, dodavala se i leća koja je vidljiva na crtežu desno od ovoga teksta. Taj valjkasti dio mogao se okretati oko svoje osi tako da je projicirao panora mu krajolika koji je okruživao šator ili kuću u kojoj je camera obscura. Pored toga što su ljudi u svakodnevnoj šetnji uživali u stvarnom pejzažu, dodatno su se mogli veseliti i diviti slici toga istog ambijenta u ovoj čarobnoj, zamračenoj prostoriji. S tim u vezi možemo reći da su pored važne povijesne uloge camere obscure ovako velikih dimenzija imale i zabavnu ulogu.
Ova jedinstvena Great Union Camera Obscura napravljena je 1892. godina na otoku Man u Irskom moru kao turistička atrakcija i još je uvijek u funkci ji. Ovi mali prozorčići na krovu ustvari su otvori za cameru obs curu i ima ih ukupno jedanaest. Svi turisti koji posjete taj pito reksni otočić obavezno svrate i u ovu veliku i neobičnu cameru obscuru.

Johannes Kepler živio je krajem 16. i početkom 17. stoljeća i bio je njemački astronom, matematičar i astrolog. U svom znanstvenom radu otkrio je da se planete gibaju po elipsama, a ne po kružnicama kako se dotad vjerovalo i time je ustanovio Prvi Keplerov zakon. Za nas je važan jer prvi u povijesti spominje pojam camera obscura u jednom svom znanstvenom djelu (fotogra fija desno gore).





Johann Zahn bio je njemački svećenik, ali se jako zanimao za razne optičke instrumen te, odnosno za svjetlo i sve njegove učinke. Posebno je proučavao efekt camere obscure i prvi je u povijesti napravio crteže preno sivih i funkcionalnih camera obscura kako to pokazuje slika desno od ovoga teksta. Te njegove ideje izgleda i funkcionalnosti prenosivih camera obscura nisu našle ogro
mnu primjenu samo u 19. stoljeću, u vrijeme izuma fotografije, već su se zadržala i do danas kao najfunkcionalniji izgled i oblik camere obscure. Prije izuma same fotografije njegove su camere obscure služile slikarima kao pomoćno sredstvo. Ova dva znanstvenika svojim radom, entu zijastvom, znatiželjom i kreativnom intuicijom stvorili su pretpostavke za otkriće fotografije te time doprinijeli da ovaj svijet bude bolji i plemenitiji.
ANALIZA FOTOGRAFIJA
Johannes Kepler 1571.-1630. i Johann Zahn 1641.-1707.
Johannes Kepler
Johann Zahn
Zabranjeni otok
“Obična akcija spašavanja, kapetane McKinley”, uvjerava me Kaoma. “Gotovi ste do večeri.”
Akcija spašavanja za koju se budi nekoga poput mene u pet ujutro, a ne mogu je obaviti spasilačke službe, nije obična akcija spašavanja. I Kaoma to zna. I o Brendanovom otoku zna koliko i ja, inače me ne bi tražio. Otpijam gutljaj trpkog čaja. A ako Kaoma misli da ćemo se vratiti kad on misli, onda se ljuto vara. Ne s tog otoka, iako je velik svega 15 sa 12 kilometara.

Vrtim u glavi brojku koju mi je nabacio. Moj honorar. Nije malen.
“Puta dva”, kažem. Nije mu drago, ali kima. Volim ljude s kojima se lako dogovorim. Naravno, da bih bio plaćen, moram biti živ.
A to na Brendanovom otoku uopće nije zajamčeno.
* * *
Dakle, na papiru: dolazak, potraga za olupi nom i unesrećenima (Lena Graff, pilotkinja, i Irik, sin gospara X., Kaominog gazde), te ako su živi njihovo izvlačenje do obale i osiguranje evakuacije.
U praksi zrak zviždi oko mene dok padam s visine od sedam kilometara, ruku uz tijelo, a avion iz kojega sam iskočio već je daleko Brendanov otok je zona zabrane letenja ispod 5000 metara visine, zona zabranjenog prilaska plovilom na bliže od tisuću metara od obale i zona zabranjenog iskrcavanja. Avion sina gos para X. letio je na nekih 500 metara nad morem. To je već dovoljno da njihovo izvlačenje nije povjereno Obalnoj straži.
A pravi razlog za te sve mjere možda se već obračunao s dvoje nesretnika. Na Brendanovom otoku, pristup nije zabranjen zbog nečijih hirova.
U uhu mi pišti, 900 metara. Povlačim ručicu, padobran se otvara, snažan trzaj, a onda se spuštam prema čistini u šumi, nadajući se da vojna kontrola letenja nije opazila moju malu akrobaciju. Otok je daleko od obale, plovnih puteva i zračnih koridora, i zabrane su uglavnom
stvar pranja ruku ako netko nastrada, ali sve jedno...
Doskačem, padam, povlačim padobran i usta jem. Otkopčavam ga, motam, skrivam ga u grmlje na rubu čistine. Padobran je samorazgradiv i za dva tjedna ga nema.
Grabim pušku, razvlačim kundak. Sve je na svom mjestu, za kratku operaciju ne treba puno opreme. Otpijam gutljaj hranjivog soka, provjera vam radio i šaljem kratku kriptiranu poruku da sam stigao i položaj gdje sam se spustio.
Osluškujem. Uobičajeni zvuci šume. Trebam biti zabrinut ako se nađem usred potpune tišine.
Otvaram kartu otoka. Stigao sam je donekle proučiti dok sam letio ovamo, ali da se podsjetim. Zelena strelica je moj položaj. Dok sam padao, nisam vidio nikakav dim. Znači da se avion nije
21 SF PRIČA
zapalio. Kaoma mi je rekao da su izgubili trag avionu u blizini otoka. Nakon dva sata, netko se sjetio mene. Gospar X. dovoljno je krupna zvijer da njegovi ljudi znaju kad svemirski kapetani s reputacijom dolaze dostaviti teret i u kojem hotelu spavaju dok ugovaraju novi prijevoz.
Ne gubim vrijeme razmišljajući što se dogo dilo avionu nakon prisilnog slijetanja. Ako su bili prošli bez ozljeda, to je značilo da su negdje zaorali neku čistinu. Tražim na karti, iscrtava mi se vegetacija. Šuma je puna čistina, brojim ih nekoliko desetaka. Sedam mi se čini dovoljno velikima da se na njih može sletjeti bez da se avion razbije o stabla.
Ništa, odlučujem, nema druge. Put pod noge! * * *
Avion nalazim na trećoj čistini. Ugažena trava, polomljeno nisko grmlje, razbacana zemlja: trag na kraju kojega počiva tamno zelena letjelica sa zlatnim logom tvtke gospara X. na repu. Ako ga ikad osobno upoznam, predložit ću mu neka promijeni boju svojim korporacijskim zrakoplo vima: da je žut ili bijel, možda bih ga vidio još dok sam padao.
Još ne prilazim avionu. Ne čujem nikoga. Ali zato vidim oštećenja na trupu. Rupe, kao od metaka. Ali nisu od metaka, previše su pravilne. Rupe su od lasera, zaključujem. Trup je poput poslovičnog švicarskog sira.
Skriven u grmlju, pogledom pažljivo pretražujem rub čistine. Mog neprijatelja nema. Što god se ovdje dogodilo, zakasnio sam. Još čekam. A onda se pokrećem, pažljivo, polako, bez i najmanjeg šuma, stalno pogledavajući prema rubu šume. Situacija je zapravo idealna da ule tim u zasjedu, ali zasjede nema.
Što znači da je neprijatelj otišao. Najvjerojatnije progoneći svoje žrtve.
Kao što sam i mislio: nema nikoga. Čitam tra gove. Pilotkinja i mladić iskočili su kroz izlaz za nuždu. Odbačena vrata, ispod izlaza napuhnuti žuti tobogan. Izlazna vrata su izrešetana. Pilotska kabina također. Oboje su se spasili iz putničke kabine. Nalazim otiske stopala, nalazim i odakle je gađano. Laserski snop sprži ranu, nema krvi i teško mi je reći je li itko od njih dvoje pogođen, ali ne čini mi se.
Nalazim slomljene grančice gdje su Lena i Irik utrčali u šumu. Neprijatelj ih je slijedio, vidim
duboke otiske. Lako ću ih pratiti, barem neko vrijeme.
Zastajem da pošaljem kratki izvještaj, a onda pratim tragove u šumu. Vode me među stab la, u igru svjetla i sjene na tlu, u kojoj me maskirna odjeća skoro savršeno prikriva, u pri jepodnevnu pjesmu i žamor mnoštva sitnih životinjica. Osmatram, osluškujem. Hitam, ali ne trčim bezglavo. Ne pravim ni najmanji zvuk. Svejedno, jako dobro znam da nisam nevidljiv. Prolaze sati u potrazi, sunce se diže, skoro će podne. Tragova je sve manje, čini se kako su u jednom trenutku Lena i momak uspjeli izbjeći lovcu. Sad ih samo treba naći. Stižem do starog izvaljenog stabla, teško deblo prelomilo je i prignječilo nekoliko mladica. Ali tu sad sunce može do tla i oko njih brzo niču nove. Vlaga, plodna trulež, snop svjetla što kroz rupu među krošnjama dopire do tla. Saprofitno grmlje niče iz debla, stvara duboku sjenu na mjestu gdje je stablo palo preko grabe.
Dobro sklonište.
Laserski ciljnik! Osjećam više no što vidim crvenu točkicu meni na glavi. Krajičkom oka zamjećujem obris. K vragu, tiha je!
“Tko vas je poslao?” Lena ne skida pištolj s mene. Očito, nije samo pilotkinja, već i tjelohran iteljica. A kako Irik ima nekih sedamnaest, osam naest, i tko zna što još, pomišljam. “Tko vas je -”
“Kaoma”, tiho odgovaram. U glavi vrtim moguće kombinacije, izvlačim zaključke. Ako se Lena ovako ponaša prema svome spasitelju, onda znači da su oboje trebali biti mrtvi. Sigurno netko nije želio da nasljednik obiteljske tvrtke tu tvrtku stvarno i naslijedi. U ovom trenutku, ne zanimaju me detalji.
Pištolj se ne spušta.
Ili je Kaoma prijatelj, pa kad je saznao da su njih dvoje završili na otoku, organizirao je spašavanje na brzinu, vjerojatno potajno, da druge frakcije unutar tvrtke to ne znaju. Solooperacija, s čovjekom s reputacijom u kojeg se mogao pouzdati.
Ili je Kaoma neprijatelj. Pa kad su njih dvoje završili na otoku, poslao je mene da ih nađem i potvrdim smrti. Ili dovršim posao? Ali, Kaoma je morao znati da ih ja da su preživjeli ne bih ubio.
Ali bih javio da su živi, da sam ih našao. I naš položaj.
22
* * *
I nekako osjećam da nad nama, na recimo 15 000 metara, kruži bespilotna letjelica naoružana do zuba. I da Kaoma, u svojoj skrivenoj jazbini, čeka moje javljanje. I koordinate, pa da nam za vrat strusi jednu termobaričku, da sprži i nas i sve sto metara oko nas. (Srećom, sva oprema na meni je moja, nema skrivenih odašiljača da mi otkriju položaj.) A to nam nije jedina briga.
Irik se izvlači ispod debla. Odmjerava me tamnim očima.
“Vidim, ne vjerujete Kaomi.”
“Ne vjerujemo nikome”, procijedi Lena. Još uvijek me drži na nišanu.
“Ja vam nisam neprijatelj. Bez obzira što me Kaoma poslao. Zapravo, ako je planirao ono što mislim da je planirao, onda sam i ja u dreku.”
“Mislim da je u redu”, progovara konačno Irik. Kima svojoj tjelohraniteljici i ona polako spušta pištolj.
“Može detalji?”, pitam, i dalje budan na svaki šum.
“Vraćali smo se kući sa studijskog putovanja”, šaptom će Lena. “320 kilometara od otoka, shva tila sam da smo ostali bez veze. A onda je naglo pao pritisak u kabini.”
“Hipoksija, gubitak svijesti, avion leti bez upravljanja dok ne ostane bez struje.” Ne bi bio prvi takav slučaj.
“Srećom smo odmah zgrabili maske za kisik. Mislila sam letjeti u trokut u blizini otoka. To bi privuklo pažnju vojne kontrole. A onda je sve počelo otkazivati. Mogla sam ili pljusnuti u more ili pokušati prisilno slijetanje na otoku.”
“Dobro ste se i izvukli.”
“Osim što se nismo”, primjećuje Irik. “Ono čudo je još u blizini.”
* * *
Razlog zašto je otok zabranjen stoji u šumi pedesetak metara preda mnom, prikriven maskirnim mrljama. Nepomičan sam, nečujan. Nema vjetra. Ne osjeća me. Jedan od razloga što sam još uvijek živ je što me mnogi nisu osjetili kad su trebali. Nauči se to u ratu.
Izgleda kao biomehaničko čudovište, što i jeste. Noge, krakovi, izduženo tijelo. Senzori, lasersko oružje, antene. Vojnoistraživački pro jekt što je ubio svog konstruktora, pola razvo jne ekipe i još petnaest vojnika iz osiguranja. Kipuće vruća pravno-sigurnosna kaša od osam tvrtki s tri planeta, oružanih snaga, tri uzastopne ovdašnje vlade i nadležnih ministarstava, te niza
od puno nula s oznakom valute na kraju. Kako je problem bilo lako izolirati, nitko se nije žurio riješiti ga dok se ne okončaju sudski postupci.
Nemam još sve detalje plana za izvući žive glave, ali prvi korak je riješiti se biomehanoida. Među sobom, imamo jurišnu pušku (1 komad) i pištolje (2 komada). Nedovoljno. Prototip je brz. Savladava sve prepreke. Ubija laserima. Pogoni ga mali reaktor u tijelu. Senzori mu nadmašuju sva naša osjetila. UI mu možda nema Einsteinov IQ, ali nemam ga ni ja. Pješačko oružje jedva će ga zagrepsti. Uvrtio si je u procesor da ubija sve što se kreće. Dakle, nema ni razgovora s njim. Gadna mala štetočina.
Očitavam koordinate.
Došlo je vrijeme da vidim je li moja procjena Kaomine nelojalnosti ispravna. Bacam pogled preko ramena, Lena i Irik su tristo metara iza mene. Neće im biti ugodno, ali ništa mi drugo ne pada na pamet.
Šaljem poruku da sam ih našao žive i zdrave. Šaljem koordinate. Čekam. Odbrojavam.
Ako sam u pravu, sad se šalje zapovijed bespi lotnoj letjelici visoko iznad nas. Prolaze sekunde. Bomba bi već trebala biti lansirana. Čekam.
I onda skačem na noge, kao da su me izbacile opruge, i bacam se u trk. Stvar se trza iz umrtv ljenosti, laseri buše stabla oko mene. Čujem ga kako se baca u potjeru.
Prasak!
Vrelina!
Bacam se u vlažno lišće, jara liže preko mene, spašava me što mi je uniforma vatrootporna. To mi daje sekunde potrebne da ne budem spaljen. Eksplozija aerosolne smjese guta zrak, gušim se, ali na rubu sam eksplozije, udar briše preko mene i onda se sve stišava, samo posvuda oko mene gore stabla i lišće i grane.
Opet se bacam u trk, nešto na meni tinja. Ni ne gledam, otkopčavam pojas i bacam ga. U zak lon iza jednog stabla! Pogledavam, podignute puške. Gdje je maločas bio stroj, sad je spaljeni krug promjera tristo metara. I ostaci u središtu, spaljeni do neprepoznatljivosti.
Lena i Irik izvlače se iz zaklona gdje sam ih ostavio.
Sad znamo kome ne možemo vjerovati. Ostaje još samo problem kako se izvući s otoka. Ali prvi korak smo napravili.
Aleksandar Žiljak
23
Program konstantno provjerava očitanu udalje nost na ultrazvučnom senzoru (I8) i uključuje ili isključuje LED-lampice neprekidno dok nije pritisnuto tipkalo (I2) koje zaustavlja izvršavanje programa.
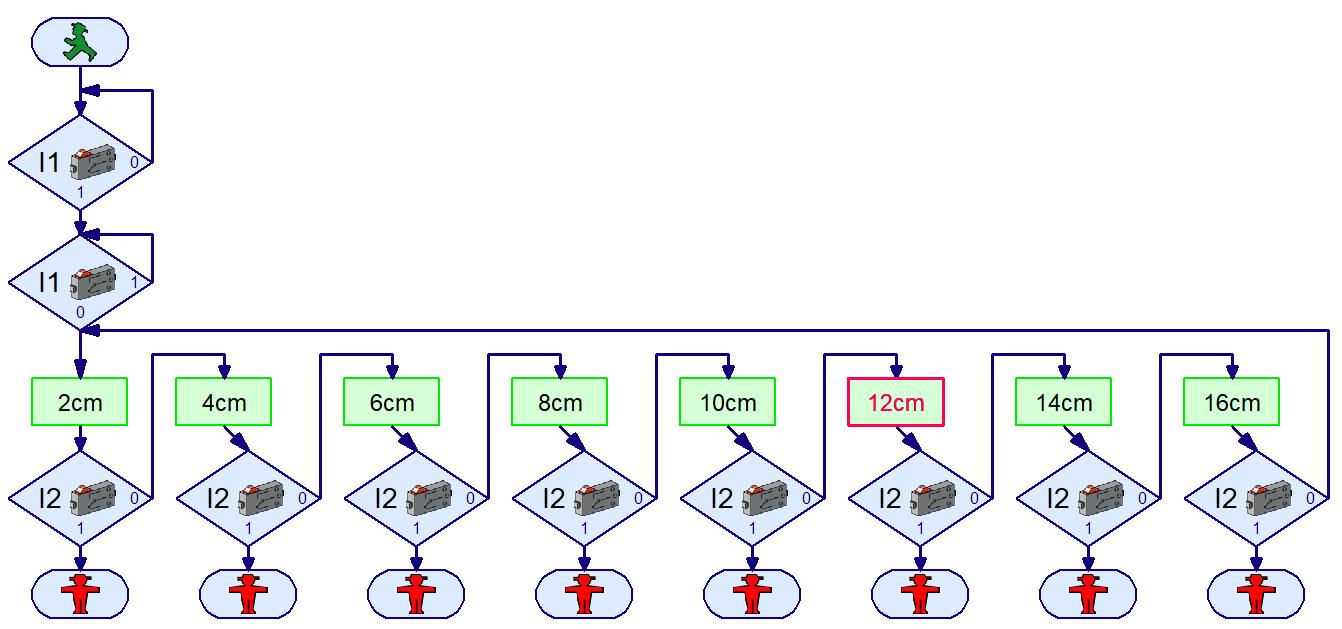
Slika 23._P_UZV
Glavni program sastavljen je od osam potpro grama koji se pokreću ovisno o očitanoj udalje nosti od objekta.
Slika 24._PP_UZV
Osam potprograma upravlja LED-indikatorima koje uključuju i isključuju ovisno o očitanim udaljenostima ultrazvučnog senzora od objekta.
Primjer: Potprogram 12 cm uključi LED-lampicu (O6) kada ultrazvučni senzor (I8) očita udaljenost od objekta dvanaest centimetara. Ostali svjetlosni indikatori (LED 1, 2, 3, 4, 5, 7, 8) ne svijetle.
Izazov_1: Izradi algoritam i dijagram tijeka (program) koji omogućava upravljanje, pokreta nje i isključivanje LED-lampica (O1-O8) tipkali ma (I1, I2). Na početku program provjerava izlaz na koji je spojeno tipkalo (I1) i očitano stanje na tipkalu (I1). Pritiskom na tipkalo (I1) i otpušta njem tipkala (I1) ultrazvučni senzor provjerava udaljenost od objekta (prepreke) i uključuje svjetlosne indikatore (LED) ovisno o očitanoj udaljenosti. Senzor mjeri udaljenost od objekta preciznošću od jednog centimetra koju prikazuje uključivanjem i isključivanjem svjetlosnih indi katora (LED-lampica).
LED-lampica (O1) svijetli u periodu od jedne sekunde ako senzor izmjeri udaljenost jedan centimetar. Ukupno je maksimalno moguće izmjeriti udaljenost do osam centimetara koju prikazuje LED-lampica (O8). Program konstantno provjerava očitanu udaljenost na ultrazvučnom senzoru (I8) i uključuje ili isključuje LED-lampice neprekidno dok nije pritisnuto tipkalo (I2).
Pritiskom tipkala (I2) ostaje svijetliti LEDlampica zadnjeg očitanja udaljenosti ultrazvuč nog senzora (I8). Program čeka ponovni pritisak i otpuštanje tipkala (I1) i ultrazvučni senzor ponovno mjeri udaljenost.
Izazov_2: Napravi programsku nadogradnju Izazova_1 tako da pritiskom tipkala isključiš sve svjetlosne indikatore na pola sekunde prije novog pokretanja i mjerenja udaljenosti.
Napomena: Riješi nadogradnju potprogra mom za isključivanje LED-lampica.
Petar Dobrić, prof.
Shield-B, razvojna pločica za Arduino Uno (1)
Tijekom protekle dvije sezone upozna li smo osnove programiranja mikroupravlja ča ATmega328P pomoću programskih jezika Bascom-AVR i Arduino IDE. Podsjetimo se: spo menuti mikroupravljač nalazi se na modulu Arduino Uno, za koji smo osmislili nadogradnju (shield) pod nazivom Shield-A. Shield-A sadrži različite komponente ‒ nizove jednobojnih i tro bojnih (RGB) LE-dioda, zujalicu, tipkala, potenci ometar, kao i priključke za alfanumerički displej i za I2C komunikaciju. Kada ga postavimo na Arduino Uno, komponente sa Shield-A povežu se s mikroupravljačem i omogućuju nam da vizuali ziramo rad programa koji smo napisali.
Vrijeme je za iskorak: tijekom ove sezone, naučit ćemo kako pomoću mikroupravljača upravljati radom različitih vrsta elektromotora! Za početak, uzmimo “običan” mali istosmjerni (DC) elektromotor, poput onoga koji koriste robotičari u svojim konstrukcijama. Najjednostavnije rečeno, svatko tko je naučio kako programirati mikroupravljač da bi pomoću njega mogao upaliti i ugasiti svjetleću (LE) diodu, znat će pokrenuti i zaustaviti elektromotor. No, je li sve baš toliko jednostavno?
Slika 1.a prikazuje uobičajeni način povezivanja LE-diode i mikroupravljača: • kada pin mikroupravljača na koji je LE-dioda povezana (na slici Pxy) postavimo u stanje logičke nule (= 0 V), kroz diodu će poteći struja i ona će zasvijetliti • kada isti pin mikroupravljača postavimo u stanje logičke jedinice (= 5 V), dioda će se ugasiti jer kroz nju više ne teče struja.
Kako LE-diode “rade” na nižim naponima od onih koji se uobičajeno koriste za napajanje mikroupravljača (na Arduino Uno pločici taj napon iznosi 5 V), potreban nam je i otpornik R koji će ograničiti struju kroz LE-diodu na odgovarajuću vrijednost. Zamislimo sada da
24 Nastavak sa 16. stranice ELEKTRONIKA
Slika 1. Kako spojiti elektromotor na mikroupravljač imamo istosmjerni elektromotor predviđen za napon od 5 V i spojimo ga na mikroupravljač umjesto LE-diode, baš kako je prikazano na Slici 1.b. Spoj je još jednostavniji jer je radni napon elektromotora upravo 5 V pa nam otpornik R više nije potreban... Međutim, slika sugerira da s tim spojem ipak nije nešto u redu; pojasnimo zašto!

Elektromotori, čak i ovako mali, trebaju za rad puno jaču struju od one koja teče LE-diodom: tipično se radi o strujama većim od 100 mA. S druge strane, pinove mikroupravljača ne smijemo opteretiti strujama većim od 40 mA: kada bismo elektromotor spojili kao na Slici 1.b i uključili ga postavljanjem pina Pxy u stanje logičke nule, kroz njega bi potekla struja puno veća od dozvoljene pa bi taj pin, a moguće i čitav mikroupravljač, bili nepopravljivo oštećeni.
Problem rješavamo uvođenjem odgovarajuće elektroničke sklopke: sklopka treba biti dovoljno snažna da može sigurno uključivati i isključivati elektromotor, i dovoljno “osjetljiva” da njenim radom možemo upravljati iz mikroupravljača. Najjednostavnija elektronička sklopka je tranzistor, u sklopu poput ovoga sa Slike 1.c:
- kada je pin Pxy u stanju logičke nule, tranzi stor T ne provodi struju (“sklopka” je otvorena) i elektromotor je ugašen
- kada je pin Pxy u stanju logičke jedinice, preko otpornika R prema bazi tranzistora T poteći će struja i on će početi voditi (“sklopka” je zatvorena) pa će se i elektromotor zavrtjeti.
Kako struja elektromotora teče tranzistorom, a ne kroz mikroupravljač, na opisani način možemo uključiti i snažnije elektromotore
koliko snažne, ovisi samo o mogućnostima tranzistorske sklopke. Zbog velikog strujnog pojačanja tranzistora, za upravljanje radom ovakve sklopke dovoljne su bazne struje od nekoliko mA, koje mikroupravljač s lakoćom može “dati”. Primijetimo kako u sklopu sa Slike 1.c elektromotor uključujemo postavljanjem pina Pxy u stanje logičke jedinice, dok smo LE-diodu, spojenu kao na Slici 1.a, uključivali logičkom nulom; ovo u suštini ništa ne mijenja, ali o tome treba voditi računa tijekom pisanja programa.
Sklop s tranzistorom ima još jednu veliku prednost: napon napajanja elektromotora može biti različit od napona napajanja mikroupravljača; npr., na takav način možemo upravljati radom elektromotora radnog napona 3, 6 ili možda 12 V. Dioda D štiti sklop od prenapona; bez nje bi na kolektoru tranzistora, u trenutku kada tranzistor isključuje elektromotor, nastao vrlo visoki napon koji bi mogao uništiti sam tranzistor.
Osim “običnog” NPN-tranzistora sa Slike 1.c, kao elektroničku sklopku možemo koristiti i tranzistore MOSFET, čije su karakteristike još bliže idealnoj sklopki. Ako nam u nekom projektu treba više elektroničkih sklopki, spretnije je upotrijebiti specijalni integrirani krug, poput L272M sa Slike 2. On sadrži dva operacijska pojačala, OP1 i OP2, i dvije dvopoložajne sklopke izvedene sa snažnim tranzistorima. Operacijska pojačala uspoređuju napone na svojim + iulazima (rade kao komparatori) i, ovisno o njihovoj trenutnoj vrijednosti, prebacuju sklopke tako da prespajaju izlazni priključak prema + ili
25
Slika 2. L272M kao elektronička sklopka
prema - polu napona napajanja. Bolje ćemo to pojasniti pomoću crteža na Slici 2. desno:
• kada je napon + ulaza operacijskog pojačala viši od napona njegovog - ulaza, sklopka će prespojiti izlazni priključak na + pol napona napajanja (gornja sklopka, na izlazu je +U)
• kada je napon + ulaza operacijskog pojačala niži od napona njegovog - ulaza, sklopka će prespojiti izlazni priključak na - pol napona napajanja (donja sklopka, na izlazu je -U).
Tranzistorske sklopke unutar integriranog kruga L272M mogu prespajati struje do 1 A, pri naponima do 28 V idealno za rad s malim istosmjernim elektromotorima. (Ovdje moramo napomenuti, kako tranzistorske sklopke unutar integriranog kruga L272M ipak nisu idealne, jer na njima u stanju vođenja postoji pad napona od oko 1 V; o tome treba voditi računa prilikom projektiranja sklopa i izbora optimalnog radnog napona.)
Druge izvedbe elektromotora, poput koračnih ili servomotora, traže drukčije pogonske sklopo ve (drivere). Zaključujemo, kako bi bilo korisno imati pločicu na kojoj se već nalaze odgovarajući sklopovi za pogon različitih vrsta elektromotora, i još poneko tipkalo ili potenciometar, kojima bismo mogli upravljati njihovim radom. Upravo takva pločica je naš modul Shield-B, čije ćemo mogućnosti istraživati u nekoliko sljedećih bro jeva časopisa ABC tehnike!
Shield-B je prikazan na Slici 3.: na gornjem dijelu slike je crtež iz programa za projektiranje tiskanih pločica, dok je na donjem fotografija izrađenog modula. Modul oblikom, dimenzijama i rasporedom izvoda odgovara pločici
Arduino Uno. Jednom kad ga postavimo na Arduino Uno, komponente sa shielda povežu se s mikroupravljačem na način koji ćemo postupno istraživati. Na Shieldu-B nalaze se i konektori na koje možemo spojiti različite vrste elektromotora. Nakon što spojimo motor i odaberemo odgovarajući napon napajanja, preostaje nam još napisati odgovarajući program kojim ćemo upravljati njegovim radom... Očekuje nas puno posla! Do čitanja!

 Vladimir Mitrović, Robert Sedak
Vladimir Mitrović, Robert Sedak
26
Slika 3. Shield-B
Mjerna jedinica farad
Neke su mjerne jedinice od XIX. stoljeća nazivane po zaslužnim znanstvenicima. Danas je u Međunarodnom sustavu jedinica (SI) takvih 19 jedinica, a još je jedna iznimno dopuštena. Takvi nazivi mjernih jedinica starih sustava ili izvan sustava (angstrem, gaus, kiri, meksvel, rendgen i dr.) otišli su u povijest. Opisat će se kako je 20 danas zakonitih jedinica nazvano po znanstvenicima i kako su normirane.
U ovom se nizu1 opisuje i kako se kroz gotovo dva stoljeća mijenjalo oslanjanje jedinica od tvarnih pramjera, do suvremenog oslanjanja na prirodne stalnice ili konstante2. Jedinice su u nizu navedene uglavnom po vremenu usvajanja.
Farad (engl. farad; znak F) je jedinica elek tričnog kapaciteta, izvedena je jedinica Međunarodnog sustava jedinica (SI). Nazvan je po Michaelu Faradayu.
Podrijetlo naziva mjerne jedinice farad Michael Faraday (1791.–1867.), znameniti bri tanski fizičar i kemičar. Neškolovan je od rad nika u knjigovežnici, postao asistent Humphrya Davya (1778.–1829.), kemičara svjetskog glasa, te ga naslijedio u Londonskom kraljevskom društvu za unapređenje prirodnih znanosti (engl. Royal Society of London for Improving Natural Knowledge). Faraday se proslavio po iznimnim pokusima, u kojima je u nedostatku teorijskog znanja utvrđivao zakonitosti mnogih prirodnih pojava. Tijekom 1820-ih i 1830-ih godina otkrio pojavu i zakonitosti elektromagnetske induk cije, elektrolize, dijamagnetizam, uveo pojam električnoga i magnetskoga polja. Utvrdio da promjena magnetskoga polja uzrokuje električ no polje.

Svoja je istraživanja opisao u djelu Pokusna istraživanja elektriciteta (engl. Experimental
1 Osnova ovoga niza, uz ostale izvore, je i niz napisa o povijesti, nazivima i definicijama mjernih jedinica, objavljenih u autorovu Leksikonu mjernih jedinica te u časopisima Svijet po mjeri i Radio HRS.
2 Vidi o tome npr.: Z. J., Nove definicije osnovnih jedinica SI-a. ABC tehnike, br. 622, veljača 2019., str. 15-16 i 21.
Izbijanje lajdenske boce, preteče električnoga kondenzatora, u kojoj se pohranjivao statički elektricitet (Novovjeki izumi. Matica hrvatska, 1882.)
Researche sin Electricity), objavljenom u tri sveska od 1844. do 1855. godine.

Po njemu se nazivaju Faradayevi zakoni elektrolize, Faradayev učinak zakretanja ravnine polarizacije svjetlosti u magnetskom polju, Faradayev kavez, mjerna jedinica farad te Faradayev krater na Mjesecu.
Stare mjerne jedinice kapaciteta
Električni kapacitet, električna kapacitivnost (znak C), omjer električnoga naboja Q i električnoga napona U, tj. C = Q/U. Kapacitet je
27
MJERNE JEDINICE
NAZVANE PO ZNANSTVENICIMA
Michael Faraday
glavno svojstvo kondenzatora, jedne od glavnih elektrotehničkih sastavnica, koji je i glavni dio titrajnih krugova i RC-sklopova.
U starim mjernim sustavima u XIX. stoljeću pokušalo se električne mjerne veličine opisati samo pomoću triju osnovnih mehaničkih veličina: duljine, mase i vremena. Bez četvrte električne ili magnetske veličine u takvim je sustavima slijedilo kako je brzina svjetlosti izražena čistim brojem jedan (c = 1). Stvoreni su posebni podsustavi Gaussova CGS-sustava

mjernih jedinica: CGSe-sustav za električne pojave i CGSm-sustav za magnetske pojave.
Iz takve postavke slijedile su danas neobične mjerne jedinice pojedinih električnih veličina, pri čemu su iste električne veličine u ta dva sustava imale potpuno različite mjerne jedinice. Tako su u CGSe-sustavu mjerna jedinica električnoga kapaciteta i u CGSm-sustavu mjerna jedinica električne indukcije računski bile jednake “centimetru” (znak “cm”). Pri tome nitko nije stvarno mislio da se električni kapacitet i induktivnost mogu izražavati jedinicom duljine, nego je to “računski tako izlazilo!”
“Centimetar” (kapacitivni)3 (znak “cm”) ili statfarad (znak statF), stara mjerna jedinica električnoga kapaciteta u CGSe-sustavu, vrijednosti “cm” = 1,1126 pF ≈ 1,1 pF.
Abfarad (znak abF), stara mjerna jedinica električnoga kapaciteta u CGSm-sustavu, vrijednosti abF = 109 F = GF.

Mjerna jedinica “centimetar” rabila se sve do polovice XX. stoljeća za označavanje kondenzatora, a zbog njene sličnosti s pikofaradom (pF) u primjeni nije predstavljala poteškoću. Može se još naći u literaturi, nacrtima i uređajima iz toga doba, ali je u primjeni poslije zaboravljena.
SI jedinica farad
Jedinicu farad predložili su još 1861. godine Josiah Latimer Clark (1822.–1898.) i sir Charles Tilstron Bright (1832.–1888.), britanski elektroinženjeri, ali kao jedinicu električnoga naboja. Godine 1873. predložena je kao jedinica električnoga kapaciteta. Takva je međunarodno prihvaćena na Prvom elektrotehničkom kongresu u Parizu 1881. godine, te na CGPM-u 1948. godine. Pri osnivanju Međunarodnog sustava 1960. godine prihvaćena je kao njegova izvedena jedinica s posebnim nazivom i znakom.

Farad (znak F) je jedinica električnoga kapaciteta, izvedena SI jedinica, definiran je kapacitetom u kojem naboj od jednoga kulona uzrokuje napon od jednoga volta, dakle farad je omjer kulona i volta, tj. F = C/V.
Dr. sc. Zvonimir Jakobović
3 Iako se izvorno nije tako pisalo, u ovom napisu su naziv i znak stavljeni u znake navoda i dodan pridjevak kapacitivni, da bi se razlikovao od jedinice duljine!
28
Kondenzator iz 1. polovice XX. st., kapaciteta 5000 “cm”, što je oko 5,5 nF
Razni kondenzatori kakvi se rabe u električnim, elektroničkim i radiotehničkim uređajima
Promjenjivi kondenzator, kakav se rabi većinom u radiotehničkim uređajima
S ciljem inspiracije i edukacije mladih i svih hrvatskih građana, kao i radi demonstracije tehnološke spremnosti hrvatskih stručnjaka za svemirsko doba, volonteri uz stručnu podršku tvrtke Spacemanic te udruge A3 (Adriatic Aerospace Association) pokrenuli su projekt izrade, programiranja i lansiranja prvog nanosatelita u orbitu pogonjenog hrvatskim znanjem i već dokazanim ( flight-proven ) naprednim tehnologijama.
CroCube je po svojoj izvedbi CubeSat, tj. standardizirani mali satelit dimenzija 10 cm x 10 cm x 10 cm ukupne mase oko 1,1 kg. Kockasti oblik nanosatelita savršeno odgovara našem najpoznatijem nacionalnom simbolu, crveno-bijelim kockicama. Zato misija nosi naziv CroCube – Prva hrvatska kockica u svemiru Nanosatelit je savršen kao prvi mali korak u svemirsko doba za jednu malu naciju kao što je Hrvatska, koja još nema svoj svemirski program niti je članica Europske svemirske agencije. Da bi se troškovi i rizici projekta sveli na minimum,

misija prvog hrvatskog satelita namjerno nije grandiozna: CroCube će ‘samo fotkati’ i slati radij ski signal tijekom preleta nad Hrvatskom. Da bi se postiglo ‘samo’ to, najmanji će problem biti othrvati se Zemljinoj gravitaciji (partneri projek ta tvrtke su koje su već poslale satelite u svemir). Možda će veći izazov biti nadići mnoge trenut ne administrativne, pravne, logističke, resursne prepreke na putu u svemir, kao i ‘prepreku svih prepreka’: poslovični hrvatski mentalitet. Zato je važnost svake, pa i ove prve misije iznimna jer će ona biti dovoljna da se otvore vrata mladim budućim stručnjacima i budućim hrvatskim misi jama koje će u svemir slati korisni teret (payload) poput znanstvenih eksperimenata.
Za ostvarivanje te svoje prve misije, CroCube će biti opremljen dvjema kamerama i s dva radijska odašiljača. Fotografirat će površinu Zemlje s 550 km visine, a priliku za fotografiranje Hrvatske imat će 3 puta dnevno, na otprilike 12 minuta. Za vrijeme trajanja misije, radioamateri i svi zainteresirani građani moći će na službenoj
29
ASTRONOMIJA CroCube:
Render: CroCube nanosatelit CubeSat crvene boje, u trenutku preleta iznad Hrvatske, s raširenim antenama Nije preambiciozno kao što nekima na prvu zvuči: za drugu polovicu 2023. godine planira se prva hrvatska svemirska misija kojoj je cilj u nisku Zemljinu orbitu lansirati CroCube, prvi hrvatski satelit. Naziv misije: CroCube – Prva hrvatska kockica u svemiru Predmet lansiranja: nanosatelit CubeSat Svrha misije: inspiracija, edukacija, demonstracija Korisni teret (payload): VGA kamera, UHF/VHF transceiver Datum lansiranja: druga polovica 2023. godine Lokacija lansiranja: Cape Canaveral, SAD Lansirni partneri: Exolaunch, SpaceX (Falcon 9)
misija lansiranja prvog hrvatskog satelita u svemir
Boarding
internetskoj stranici misije www.crocube.hr pratiti stanje i kretanje satelita.

Tko će to sve financirati? Da bi se povećao interes za astronomiju i svemirske projekte, misija je osmišljena tako da uključuje sve zain teresirane građane, podjednako entuzijaste kao i tvrtke te stručnjake koji žele aktivno podupirati projekte koji ojačavaju (STEM) znanost i visoko tehnološko poduzetništvo u Hrvatskoj. Zbog toga se ovaj inauguralni let u svemir financira kroz tzv. crowdfunding kampanju kojoj je cilj skupiti 130 000 €.
Sredstva se prikupljaju kroz donacije na poznatoj hrvatskoj platformi Croinvest, a donirati može svaka fizička i pravna osoba u Hrvatskoj i inozemstvu, uplatom internet bankarstvom, kreditnom karticom i kriptovalutom.
Kapetanica misije, Daniela Jović, poziva čitatelje časopisa ABC tehnike da se informiraju o misiji CroCube na www.crocube.hr gdje se nalazi i link za doniranje u crowdfunding kampanji. Zaljubljenici u svemir mogu već za samo 100 kuna (13,27 €) poslati svoje ime u svemir i na poklon dobiti suvenir u obliku boarding passa tj. ulaznice. Na raspolaganju su i brojni drugi suveniri, a donirati je moguće bilo koji iznos novca. Za najveće (uglavnom korporativne) sponzore rezervirana je posebna matična ploča
G. Ante Radonić, poznati hrvatski astronom, podržava CroCube

na kojoj ima mjesta za 10 ugraviranih naziva najvećih sponzora.
Misiju podržavaju brojna stručna udruženja te poznati astronomi poput g. Ante Radonića, astrofizičarke Vernese Smolčić i mnogih drugih vrhunskih znanstvenika u Hrvatskoj i svijetu. Upravo Hrvatska zajednica tehničke kulture kao krovna nacionalna zajednica tehničke kultu re u Republici Hrvatskoj s velikim interesom prati projekt te preko svojih članica i njihovih komunikacijskih kanala izvještavat će o svim zanimljivim pomacima i zbivanjima vezanima za izgradnju i lansiranje prve hrvatske kockice.
Pridružite se misiji i crowdfunding kampanji na www.crocube.hr.
Danko Kočiš
30
passevi kao suveniri. Imena donatora bit će pohranjena na memorijskoj kartici koja je dio CroCubea
Roboti kuhari
Prehrambena industrija veliki je privredni prostor koji obuhvaća poljoprivredu, industrijsku proizvodnju, ali i restoransku pripremu i posluživanje hrane, odnosno sve popularnije pakiranje i dostavu hrane naručiteljima. U tom lancu posebno mjesto zauzima priprema hrane kulinarstvo. Iako su u svakom od navedenih područja roboti već prisutni, smatra se da je posebice proizvodnja i prerada hrane, s obzirom na opseg poslova i uvjete rada, nedovoljno robotizirana. Kulinarstvo je djelatnost u kojoj ljudski rad prevladava nad automatiziranim ili robotskim sustavima.
To ne znači da se u pripremi i posluživanju hrane nisu događale promjene. Brza hrana (fast food) promovirana je već koncem 40-ih godina XX. st. No unatoč stalnoj modernizaciji s ciljem pojeftinjenja i ubrzavanja ponude još i danas se traži prostor poslovnog napredovanja pa je robotiziranje pripreme i serviranja hrane neizbježna promjena. Robotizacija nudi širu ponudu, ali i višu razinu i kvalitetu serijske pripreme složenijih jela. Ona omogućava i kopiranje umijeća vrhunskih kuhara šefova. No robotizacija ponude fast fooda ne odvija se prema očekivanjima. Veliki svjetski lanci trenutno su zaokupljeni digitalizacijom poslovanja. Tako je McDonalds zaustavio proces robotiziranja svojih trgovina inzistiranjem na pouzdanosti prepoznavanja slušnih naredbi od 92% umjesto sadašnjih 80%. Početkom 20-ih godina bilježi se



KUŠANJE I ŽVAKANJE. Kulinarstvo je djelatnost u kojoj čovjek još uvijek s velikom prednošću dominira nad strojnim sustavima. Najznačajnija razlika između kuharskih postupaka robotskih i ljudskih kuhara je ta što potonji neprestano tijekom kuhanja kušaju hranu u vrlo kompleksnom postupku, teškom za oponašanje, koji se naziva žvakanje.
čak i nazadovanje. Neki pokrenuti robotizirani restorani se zatvaraju.
Drži se da je to samo prolazna recesija jer mnoge činjenice govore u prilog robotizaciji kuhinja restorana. Važan razlog je, primjerice, rastući trend prehranjivanja izvan kuće koji vodi industrijalizaciji kulinarstava. Taj običaj u neskladu je s padom zanimanja za rad u kuhinji. Osim standardizacije i ušteda u proizvodnji, cijena ljudskog rada, koja se u razvijenim zemljama kreće oko 19 eura po satu sa svim davanjima, najsnažniji je poticaj za industrijsku pripremu hrane. Zbog toga se nastoji smanjiti broj osoblja po prostoru.
Iako je još raširena romantična predstava o kuharstvu kao kreativnom zanimanju na granici umjetnosti istina je da se restoranske visoko serijske proizvodnje jela, zbog radnih uvjeta u kuhinji (temperatura, stres, radno vrijeme...) smatraju visoko toksičnim, vrlo neurotičnim i po ljudsko zdravlje opasnim poslom. Kuhara je sve manje pa je zapošljavanje i zadržavanje
Ubrzanje pripreme hrane započelo je sredinom 40-ih godina XX. st. kada je McDonalds u svojim uličnim kioscima počeo primjenjivati novi poslovni pristup koji je Toyota koristila u proizvodnji automobila: ne nuditi više od onoga što kupcu treba. Zalogajnice i kiosci fast fooda preplavili su svijet istisnuvši spore i skupe restorane. Automatizirane su proizvodnje dvaju najvažnijih fast food proizvoda: hamburgera i pizza. Automat “Creator” (slika u sredini) može samostalno pripremiti i poslužiti hamburger po cijeni od šest USD. Slično je i s masovnim automatskim pečenjem pizza. Time kao da se iscrpilo područje moguće automatizacije fast food kulinarstva.
31
OD AUTOMATIKE FAST FOODA DO ROBOTIZIRANE KUHINJE.
SVIJET ROBOTIKE
Štampači hrane,
na slici lijevo svakako su najuzbudljivija novost u strojnoj pripremi hrane. Linearni manipulator Troosni raspodjeljuje po grijaćoj ploči tijesto za palačinke u obliku koji želite. Postoje pisači koji tiskaju čokoladne i druge guste paste. Uglavnom se radi s jednom pastom. Pisači hrane mogu slojno nanositi više sastojaka, ali ih ne mogu uvijek skuhati. U Tokiju sushi restoran “Sushiro” koristi više robota za kuhanje ribe i oblikovanje riže za sushi. Potom ljudi dovršavaju sushi dodavanjem ručno rezane ribe. Na slici desno robotski je manipulator zaposlen na kuhanju španjolske paelje.


zaposlenika postao glavni problem kuharske branše. Zbog radnih uvjeta kuharska praksa, po odrednicama nepovoljnih radnih uvjeta, postaje prostor pogodan za robotizaciju.
Trend automatizacije kuhanja može se pratiti sve do 2015. kada se postupno sve više pojavljuje robotizacija kao znak nastojanja da se oponaša rad klasičnih kuhara. Od tada je ta težnja ubrzano rasla. Virusna pandemija snažno je utjecaja na uvođenje strojeva u djelatnost pripreme, posluživanja i dostave hrane do mjere da se korjenito propitivao i mijenjao pristup kuharskoj struci. Ali da i nije bilo te globalne bolesti, kuharstvo, kao poseban i važan dio ugostiteljstva, počelo bi se mijenjati zbog promjene radnih uvjeta. Najveći problem brze prehrane smanjenje je troškova pripreme hrane uz zadržavanje kvalitete. Konkurencija je sve jača pa je potreba i potraga za uštedama velika. Skraćenje vremena pripreme, brza posluga, velika preciznost u vaganju sastojaka i besprijekorna
higijena postaju presudni elementi tržišnog uspjeha.
Iako je došlo do nekih pomaka, još uvijek predstoje mnoge promjene za kuhinjske robote. Između masovne prehrane u lancima fast fooda i visoke gastro ponude u elitnim restoranima postoji široki prostor za robotiziranje djelatnosti koja se oduvijek smatrala umjetnošću. Držalo se stoga da umijeće kuhanja nije moguće mehani zirati. Ali kuharski recepti do određene se razine zaista mogu shvatiti kao strojni algoritmi, čija svrha je prenošenje kvantitativnih i kvalitativ nih podataka i uputa potrebnih za pripremanje nekog jela.



Takvo kruto razumijevanje kuhanja nije dovoljno da bi se napravilo izuzetno jelo iz
Prema jednoj podjeli postoje tri glavne vrste kuhinjskih robota koji su trenutno u fazi razvoja i uvođenja u rad: pisači hrane, minirobotski uređaji i robotske kuhinjske ruke.
stvara uvide u kvalitetu hrane kuhanjem točno onako kako je definirano. Među klijentima tvrtke su CaliBurger i White Castle, gdje se svaki mjesec “okreće” 10 tisuća hamburgera i prži više od 12 tisuća košarica s krumpirima.

32
VRSTE ROBOTA KUHARA.
poput PancakeBota
FAST FOOD “KUHINJE DUHOVI”. Postale su hit za početka pandemije 2020. Na slikama su tri radnje koje već danas omogu ćavaju robotima potpuno preuzimanje pripreme i posluživanja hrane u prostoru za brzu prehranu. Zbog toga se te kuhinje bez ljudi zovu mračne kuhinje, kuhinje duhovi ili virtualne kuhinje. Na slikama desno i u sredini je robotska ruka Flippy tvrtke Miso Robotics s “perajom” za okretanje pljeskavica i manipuliranje košarom za fritezu. Potpuni sustav uključuje i platformu Miso Analytics koja
PRVA ROBOTSKA KUHINJA. Roboti tvrtke Moley Robotics omogućuju veliku preciznost i finoću pokreta pa mogu pripremati i gurmanska jela. Upravljačka arhitektura omogućava učenje u kojem stroj slijedi upute kuhara. Proces kuhanja sagledava se kao niz funkcionalnih operacija, kao što je pravo vrijeme pripreme ili pravovremeno dodavanje sastojaka u propisanim količinama. Moleyeve ruke oponašaju pokrete kuhara (slika u sredini). U usporedbi s robotskim rukama ljudi imaju mnogo više spretnosti. Moley je dizajniran za pripremu do 5000 različitih jela po receptima. Koristi indukcijske ploče osjetljive na dodir i posebno posuđe. Cijena kuhinje je oko 350 000 američkih dolara.


posebnih restorana gdje šef kuhinje pokazuje svoju jedinstvenost radeći vrlo neobične stvari. No svakodnevna restoranska jela nisu izuzetna. Mnogo je više svakodnevnih običnih serijski proizvedenih jela posebice onih koja spadaju u fast food. Na pripremama takvih jela kuhari rade u uvjetima koji su sve prije nego ugodni. U suvremenim kuhinjama rade se dosadne i ponavljajuće radnje, a to su poslovi za robote. Robotika u odnosu na automatizaciju omoguća va širu ponudu bez promjene hardvera.

Svaki robot koji se koristi u kuhanju može se smatrati kuhinjskim robotom. Moderna kuhinjska tehnička oprema može preuzeti više od 50% poslova u postupku kuhanja, pa čak i samostalno skuhati cijeli obrok. Koriste se standardni industrijski roboti u primjenama gdje postoje ponavljajući pokreti. Današnji roboti


kuhari kompromis su između funkcionalnosti i potrebne složenosti. Složeniji stroj donosi više problema u primjeni. Pouzdan robokuhar trebao bi raditi u tisućama ciklusa bez oštećenja i kvara.
Tvrtka Moley Robotics u prvoj komercijalno dostupnoj robotiziranoj kuhinji, prikazanoj javnosti 2020., koristi dvije posebno konstruirane robotske ruke s petoprstim šakama koje se tijekom kuhanja kreću duž over-head tračnica kako bi pristupile svim funkcionalnim dijelovima okoline na različitim pozicijama. Robot radi posve iste radnje kao i čovjek. U postupku učenja bilježi se temperatura jela za kuhanje i redoslijed operacija. No ljudska ruka je složenija i spretnija. U usporedbi s rukama kuhara robotske ruke Moley, s više od dvadeset zglobova, jednostavne su ali omogućavaju snimanje rada kuhara i pouzdan rad. Unatoč tome robotske ruke nikada
33
BUDUĆNOST ROBOTSKOG KUHANJA. Zbog skupoće razvoja teško je očekivati robota kuhara u obiteljskom okruženju. Pogotovo se to odnosi na androidne robote (slika lijevo). No mali jednoručni pomagači nalik prikazanom na desnoj slici mogli bi biti cijenom dostupni. Većina malih kućanskih aparata za kuhanje bit će robotizirana. Zbog složenosti i skupoće autonomno robotsko kuharstvo treba prije svega očekivati u velikim sustavima hotelskih restorana i u masovnoj društvenoj prehrani.
se neće po spretnosti moći mjeriti s rukom ljudskog profesionalnog kuhara.
Najveći udio u visokoj cijeni razvoja robotiziranih kuhinja zauzima razvoj i izrada mehaničkog hardvera stroja. Razlog je u tome što su novi koncepti u hardveru rijetki, traže puno razvojnih i proizvodnih resursa, akumuliraju rizik, a postoje i problemi s pouzdanošću rada. Zbog toga samo velike korporacije obično grade komplicirane strojeve.
Budućnost robotičkog, kao i automatiziranog kuhanja, prije je u ugostiteljstvu nego u
Projekt Perun I.
U organizaciji Jadranske aero-svemirske asocijacije ( Adriatic Aerospace Association - A3space) u izradi je prvi projekt koji ima za cilj konstruirati, montirati i lansirati prvi hrvatski satelit CubeSat 2U s kamerom nazvan Perun I. Ime je dobio po Perunu, bogu groma i munje, vrhovnom božanstvu u panteonu slavenskih bogova, prema slavenskoj mitologiji. Poput slavenskog boga Peruna, ovim projektom žele prodrmati i osvijetliti znanje o svemiru u Hrvatskoj. Brojka jedan u nazivu hrvatskog satelita označava prvi iz serije koja bi uslijedila, a taj je satelit ulaznica Hrvatske u svjetski svemirski klub.
No, nije samo Perun I. potreban, potrebna je i infrastruktura koja će primati informacije s njega, ali i upravljati njime te zemaljska stanica (smještena u Viškovu pokraj Rijeke).
U izradi Peruna I. sudjeluju međunarodni stručnjaci za satelitsku tehniku iz NASA-e i Airbusa, stručnjaci i znanstvenici za mehatroniku s naših fakulteta, učenici tehničkih škola i studenti. Visoko učilište Algebra u Zagrebu bit će centar gdje će se satelit sklapati i testirati, kompanija Amphinicy zadužena je za softvere za komunikaciju, Fakultet elektrotehnike, računarstva i informacijskih tehnologija Osijek radi na solarnim ćelijama, Geolux iz Zagreba radi na kameri, a članovi s Instituta “Ruđer Bošković” na zemaljskoj stanici. Ti inženjeri i znanstvenici, ne samo da će naučiti teoriju svemirskog inženjerstva, već stječu bogatstvo praktičnog iskustva. Studenti koji stječu znanje
kućanstvima. Hoteli s 24-satnom poslugom hrane po sobama teško pronalaze kuhare koji žele dežurati noću. Zato su roboti idealni za noćni servis. Nadalje, kuhinje u domovima za starije osobe, u bolnicama i klinikama trebaju standardiziranu, svježe skuhanu i jeftinu hranu. Kuhinje u tim sredinama također su neugodne za rad. Širenje robotskog kuharstva kao i automatizacija pripreme hrane ovisit će o stanju na tržištu radne snage. Robotizacija kuharstava dovest će do daljnjeg optimiziranja troškova proizvodnje.
Igor Ratković
slike modela satelita

iz zrakoplovstva često ga koriste u drugim visokim tehnologijama – biomedicini, strojarstvu, softverskom inženjerstvu itd.
Komponente Peruna I. potrebne da bi se došlo do tog svemirskog pogleda: kamera, izvor energije, daljinska komunikacija i vrlo važno upravljanje orijentacijom kamere, iako naizgled jednostavne, napravit će istinski test hrvatskog znanja u visokoj tehnologiji za svemirsko okruženje. Bit će to test predanosti i motivacije mladih entuzijasta da nauče o onome što ih čeka u njihovim životima i budućnosti. Ovaj projekt učinit će Hrvatsku članom svjetskog svemirskog kluba.
Više o samom projektu može se pronaći u animaciji dostupnoj preko poveznice http:// images.energetika-net.com/media/articles/ nove_tehnologije/2021_09-3.mp4.
Izvor: https://a3space.org
Marino Tumpić
34 ASTRONOMIJA
Trodimenzionalne
Velebni stadioni spremni za SP 2022. u Katru
Dok su trajale završne pripreme i sve bliži početak najvećeg nogometnog događaja u 2022 godini sve su oči uprte u Katar, koji se priprema ugostiti 22. po redu Svjetsko nogometno prven stvo, FIFA Svjetski kup Katar 2022.
Katar je prva država iz arapskog svijeta doma ćin Svjetskog nogometnog prvenstva, a zimski raspored, koji će izbjeći ljetne vrućine u ovom dijelu Azije, promijenit će dosadašnju tradiciju mundijala.
Sedam novih stadiona, koji se mogu nazvati umjetničkim djelima, uz osmi, obnovljeni Khalifa International Stadium, smješten na kultnom Torch Toweru, bit će domaćini nogometnim zaljubljeni cima sa svih strana svijeta.
Katar će tako 2022. probiti led kada je riječ o organizaciji velikih sportskih događaja u tom dijelu svijeta. Oštra vruća klima s puno vlage uvelike otežava stvari. Zato će svi stadioni biti klimatizirani, ali pravi je izazov u takvom okru ženju održati ono najvažnije – teren.
Da održavanje travnate podloge, i to po puno povoljnijim vremenskim uvjetima, nije lak zada tak, vidjelo se na prošlom Europskom prvenstvu u Francuskoj. Francuzi su morali promijeniti raspored utakmica jer se tereni nisu dovoljno brzo obnavljali.
“Polja u ovom kraju trebaju puno vode, sunca i provjetravanja. Ako jedan od ovih elemenata nedostaje, teren neće biti dobar. Na našim sta dionima susrećemo se s velikim izazovima jer su gotovo svi klimatizirani i gotovo zatvoreni. Zato razvijamo novu vrstu trave koja će biti otporna na sve to i koju bismo mogli koristiti i u druge svrhe”, kaže Yasser al-Mulla, predstavnik Organizacijskog odbora Svjetskog prvenstva u Katru.
Katarci žele izbjeći probleme pa su napravili pokusno polje na 60 000 četvornih metara. Tamo proizvode i testiraju različite vrste trava i načine uzgoja.
“Ako je potrebno, travu možemo postaviti na bilo koji stadion za manje od 18 sati. Sve će to ostati kao nasljeđe nakon Svjetskog prvenstva koje će se koristiti za održavanje nogometnih terena u Katru, ali i u regiji,” dodao je Mulla.
Pustinja je pretvorena u plodno tlo koje uz potporu suvremene tehnologije daje 24 vrste trava. Osim tog prostora zasađeno je i 20.000 stabala koja će stvarati hlad oko stadiona.
Međunarodni stadion Khalifa
Khalifa International Stadium, poznat i kao Nacionalni stadion, višenamjenski stadion u glav nom katarskom gradu Dohi te je dio kompleksa Doha Sports City koji uključuje Aspire Dome, Aspire Tower i vodeni centar Hamad. Stadion je dobio ime po bivšem katarskom emiru Khalifi bin Hamadu Al Thaniju. Stadion je otvoren 1976. ali je tek 2005. u potpunosti obnovljen i renoviran za potrebe Azijskih igara koje su 2006. održane u Katru. Tada je kapacitet stadiona povećan s 20.000 na 40.000 mjesta.
Stadion Al Janoub
Smješten u južnom gradu Al Wakrah, svečano otvoren 2019. godine stadion Al Janoub ima 40.000 sjedećih mjesta sa ugrađenim sustavom za hlađenje sjedala te pokretni krov koji djeluje poput jedra i na taj način stvara zaštićeno okruženje za igru tijekom vrućih ljetnih mjeseci. Stadion Lusail
Stadion Lusail, koji se nalazi u gradu Lusail, 23 kilometra sjeverno od glavnog grada Dohe, bit će domaćin finalne utakmice FIFA Svjetskog kupa Katar 2022. Kapacitet stadiona je 80000 sjedećih mjesta. Dizajnom podsjeća na drevne ručno izrađene zdjele pronađene diljem arapskog i islamskog svijeta, dok igra sjene i svjetla simbolizira tradicionalne lampione „fanar“.
Stadion Al Bayt
Stadion Al Bayt nalazi se u gradu Al Khor, 35 km sjeverno od glavnoga grada Dohe s kapacitetom od 60.000 gledatelja bit će domaćin otvorenja FIFA Svjetskog kupa Katar 2022.
Nadahnut kulturom nomadskog naroda Katara bayt al sha‘arom, veličanstvena struktura šatora na stadionu obavija ultramoderni nogometni stadion. Tradicionalno, šatori se prepoznaju po crnim i bijelim prugama. To se odražava na karakterističnoj vanjštini arene, kao i na živim uzorcima koji dočekuju obožavatelje kad uđu. Održivost je bila najvažnija u razvoju stadiona Al Bayt, a gornji sloj je dizajniran da se ukloni nakon turnira. Briga o zaštiti okoliša može se
35 GRADITELJSTVO
prepoznati i u brojni parkovima, jezerima i zašti ćenom zelenom pojasu okolnog grada Al Khora koji se protežu od stadiona do mora – osigurava jući trajno naslijeđe najgostoljubivijeg stadiona na svijetu. Sjedala za stadion Al Bayt proizvode lokalne tvrtke.
Education City Stadium Education City Stadium nalazi se u predgrađu Dohe, Al Rayyan, 7 km sjeverozapadno od samog centra Dohe u samom susjedstvu vodećih katar skih sveučilišta. Ultramoderan dizajn stadiona isprepliće se s tradicionalnom islamskom arhi tekturom. Noću, digitalna svjetlosna predstava osvjetljava fasadu, pružajući posjetiteljima neza boravan doživljaj. Stadion može primiti 40 000 gledatelja.


Stadion Stadion Ahmad Bin Ali
Stadion Ahmad Bin Ali ponosno stoji u Umm Al Afaeiju – jednom od najpovijesnijih gra dova Katra i domu poznatog sportskog kluba Al Rayyan. Nalazi se na samom rubu pustinje, poprišta mnogih katarskih priča koje žive u srcu lokalnog stanovništva – gostoljubivog naro da koji voli svoj nogomet jednako kao i svoju fascinantnu prošlost. Ima kapacitet od 40 000 mjesta. Dizajn stadiona i zgrada koje ga okružuju odražavaju ljepotu lokalne kulture i tradicije. Isprepleteni izgled fasade odražava valovitost pješčanih dina, dok zamršeni geometrijski uzor ci odražavaju ljepotu pustinje, domaće flore i faune, kao i lokalne i međunarodne trgovine. Više od 80% građevinskog materijala potječe od starog stadiona koji je prethodno bio na tom mjestu, dok je postojeća fauna također pažljivo očuvana i zadržana.
Stadion Al Thumama




Stadion Al Thumama s 40 000 mjesta nalazi se 12 kilometara južno od Dohe. To je arhitek tonski prikaz gahfiye, tradicionalne kape koju nose arapski muškarci i koja simbolizira odrasta nje mladih. Stadion je svojim jedinstvenim diza jnom osvojio nagradu Architectural Review Future Projects. Njegova briljantna bijela vanjština ističe se usred bujnog zelenog okruženja – područja za igru i opuštanje. Stadion Al Thumama donosi viziju koja nadilazi njegovu inspiraciju i svrhu – simbolično predstavlja odrastanje prekrasne igre.


Stadion 974, Ras Aboud Stadion 974 u Ras Abu Aboudu s 40 000 mjesta nalazi se 10 kilometara istočno od Dohe. Izgrađen u potpunosti od transportnih kontej nera i modularnog čelika, to je prvi potpuno rastavljivi natkriveni nogometni stadion – što pokazuje predanost Katra isplativoj održivosti i odvažnom dizajnu. Ovo jedinstveno mjesto odaje počast katarskoj dugogodišnjoj tradiciji svjetske trgovine i pomorstva. Ne samo da je 974 međunarodni pozivni broj za Katar, već je i točan broj brodskih kontejnera koji se koriste u izgrad nji. Smještenom u lučkom području s pogledom na priobalje Dohe, navijači na stadionu 974 moći će osjetiti svjež povjetarac iz Arapskog zaljeva. Nakon turnira, kontejneri i superstruktura ponovno će se koristiti. Ovaj novi koncept u obli kovanju dvorane osigurava privremenu fizičku prisutnost stadiona 974, ali će njegova ostavšti na biti vječna.
 Sandra Knežević
Stadion Al Janoub
Stadion Al Thumama
Education City Stadium
Stadion Al Bayt
Stadion Lusail
Stadion Al Janoub
Međunarodni stadion Khalifa
Stadion Ahmad Bin Ali
Stadion Al Janoub
Sandra Knežević
Stadion Al Janoub
Stadion Al Thumama
Education City Stadium
Stadion Al Bayt
Stadion Lusail
Stadion Al Janoub
Međunarodni stadion Khalifa
Stadion Ahmad Bin Ali
Stadion Al Janoub

