segon semestre 2011 número 4
Revista de
La tecnologia avui
4 ATLAS: una eina per descobrir la física fonamental de l’Univers mitjançant el gran col·lisionador d’hadrons (LHC)
M. Pilar Casado
12 Tecnologies emergents per a la indústria alimentària
Mercè Raventós
22 Recerca en incendis forestals: cremes experimentals a Austràlia
Eulàlia Planas, Elsa Pastor i Yolanda Pérez
29 Robots humanoides i tecnologia per assistir la marxa humana
Josep Maria Font-Llagunes
Educació tecnològica
39 AULATEC: algunes accions per millorar l’acció educativa de l’àrea de tecnologia a secundària
Joan Busquets i Tendero, Pere Garcia i Janeras i Jordi Regalés i Barta
43 Segones Jornades sobre Innovació a l’Ensenyament de la Tecnologia: Els Reptes dels Nous Recursos
Ramon Izquierdo
Entrevista a Joan Vallvé
45 Josep Amat
Actualitat
48 Actes organitzats per la Societat Catalana de Tecnologia
49 Convocatòria de premis
51 Recursos web
53 La SECCT celebra el centenari de la Secció de Ciències
3 R evista de T ecnologia , núm. 4 (2011)
SUMARI 2 Editorial
ATLAS: UNA EINA p ER DESCO b RIR
LA fí SICA f ONAMENTAL DE L ’ UNI v ERS
MITJAN ç ANT EL G RAN C OL·LISIONADOR D ’H ADRONS (LHC)
M. Pilar Casado
Institut
de Física d’Altes Energies. Universitat Autònoma de Barcelona
Introducció
El descobriment de l’electró en 1897 per Joseph John Thomson va iniciar una revolució en el progressiu enteniment de les propietats de la matèria. Després d’aquesta fita, nombrosos experiments, cada vegada més complexos, han permès esbrinar d’una manera més precisa molts components fonamentals de la matèria i algunes regles que en regulen el comportament. En aquesta aventura del coneixement han estat fonamentals nombrosos laboratoris de física de partícules, tant a Europa com als Estats Units i a la resta del món.
La teoria actual no és completa i la investigació continua. El projecte del gran col·lisionador d’hadrons (LHC)1 permetrà estudiar la teoria bàsica de tot l’Univers, mitjançant la recreació d’etapes molt primitives de la seva història, fent col·lisionar feixos de protons en determinats punts de la màquina, a una energia set vegades més elevada que la de les màquines actuals, per tal d’explorar distàncies deu ordres de magnitud més petites que un àtom.
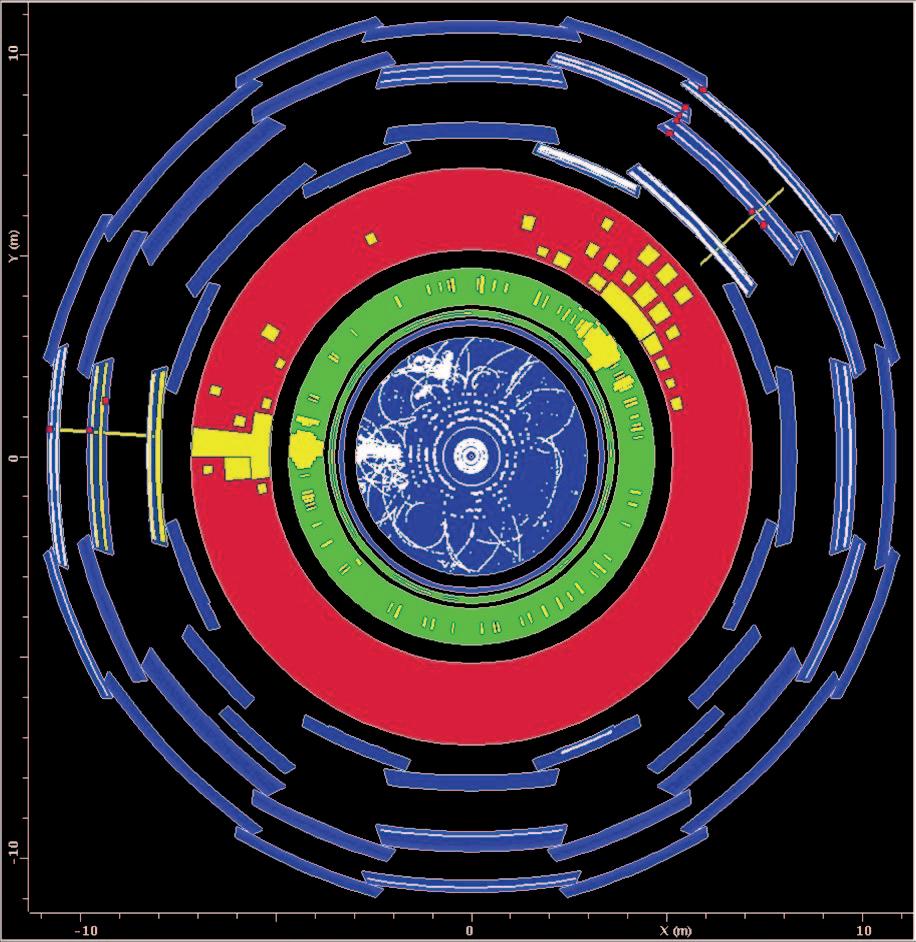
Les primeres proves amb l’LHC es van iniciar el setembre del 2008. S’ha aconseguit fer circular protons de 900 GeV en els dos sentits de l’anell. En la figura 1 es pot veure el primer esdeveniment pres amb un feix de l’LHC amb ATLAS, un dels detectors de l’LHC. Durant el 2009 s’ha intentat incrementar l’energia de les partícules i s’han produït les primeres col·lisions en els punts d’interacció.
L’experiment ATLAS2 està situat en un dels punts de col·lisió i mesurarà les propietats dels estats finals dels xocs que s’hi produiran. Es tracta d’un detector de propòsit general fruit d’una col·laboració en la qual participen uns dos mil científics.
Algunes de les preguntes que es voldran respondre són: quins són els constituents bàsics de la matèria?,
1. LHC Design Report <http://ab-div.web.cern.ch/ab-div/ Publications/LHC-DesignReport.html>.
2. G. Aad et al., «The ATLAS experiment at the CERN Large Hadron Collider», JINST, 3, S088003 (2008); «ATLAS collaboration, detector and physics performance», Technical Design Report, CERNLHCC-99-14 (1999); «ATLAS collaboration, detector and physics performance», Technical Design Report, CERN-LHCC-99-15 (1999).
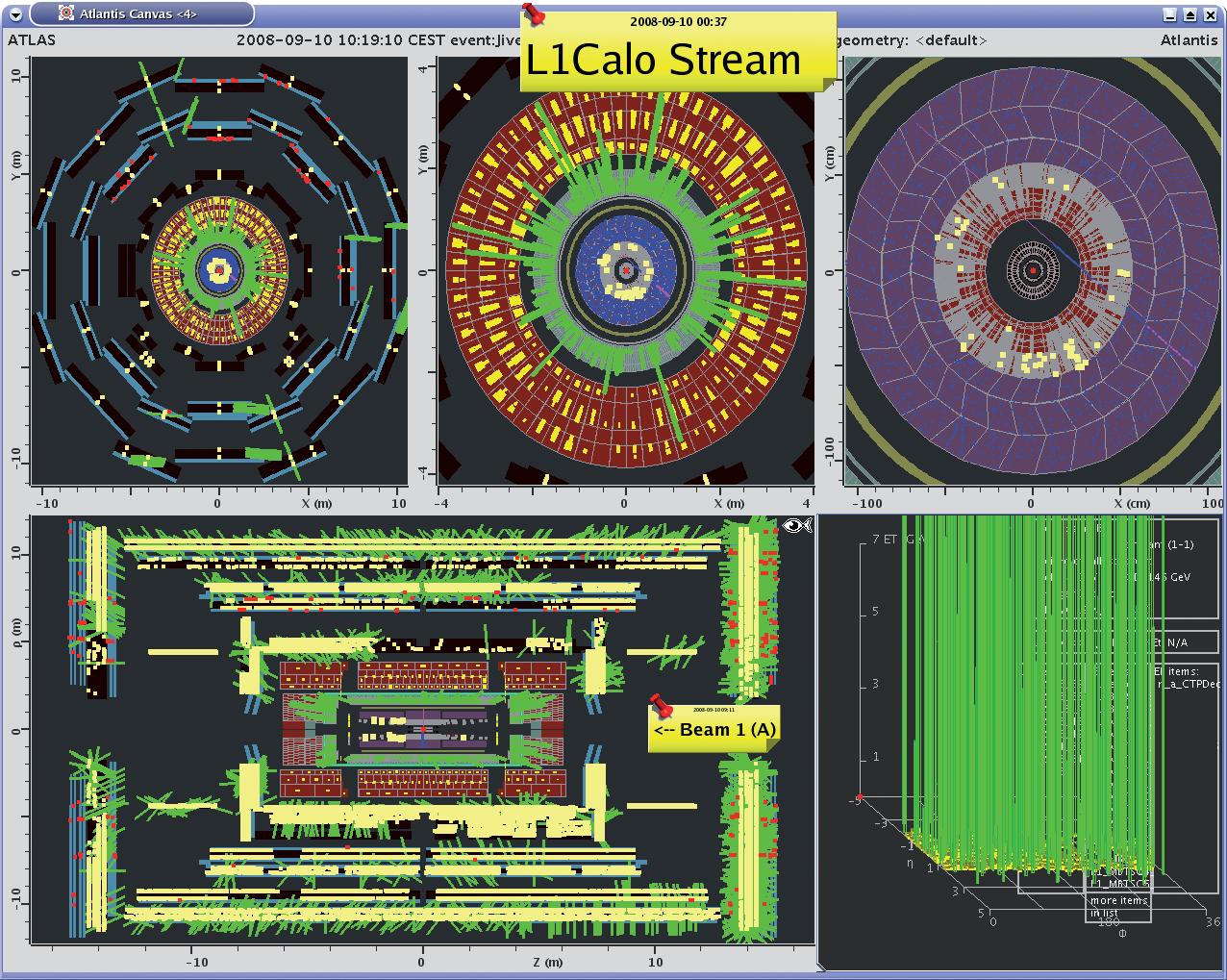
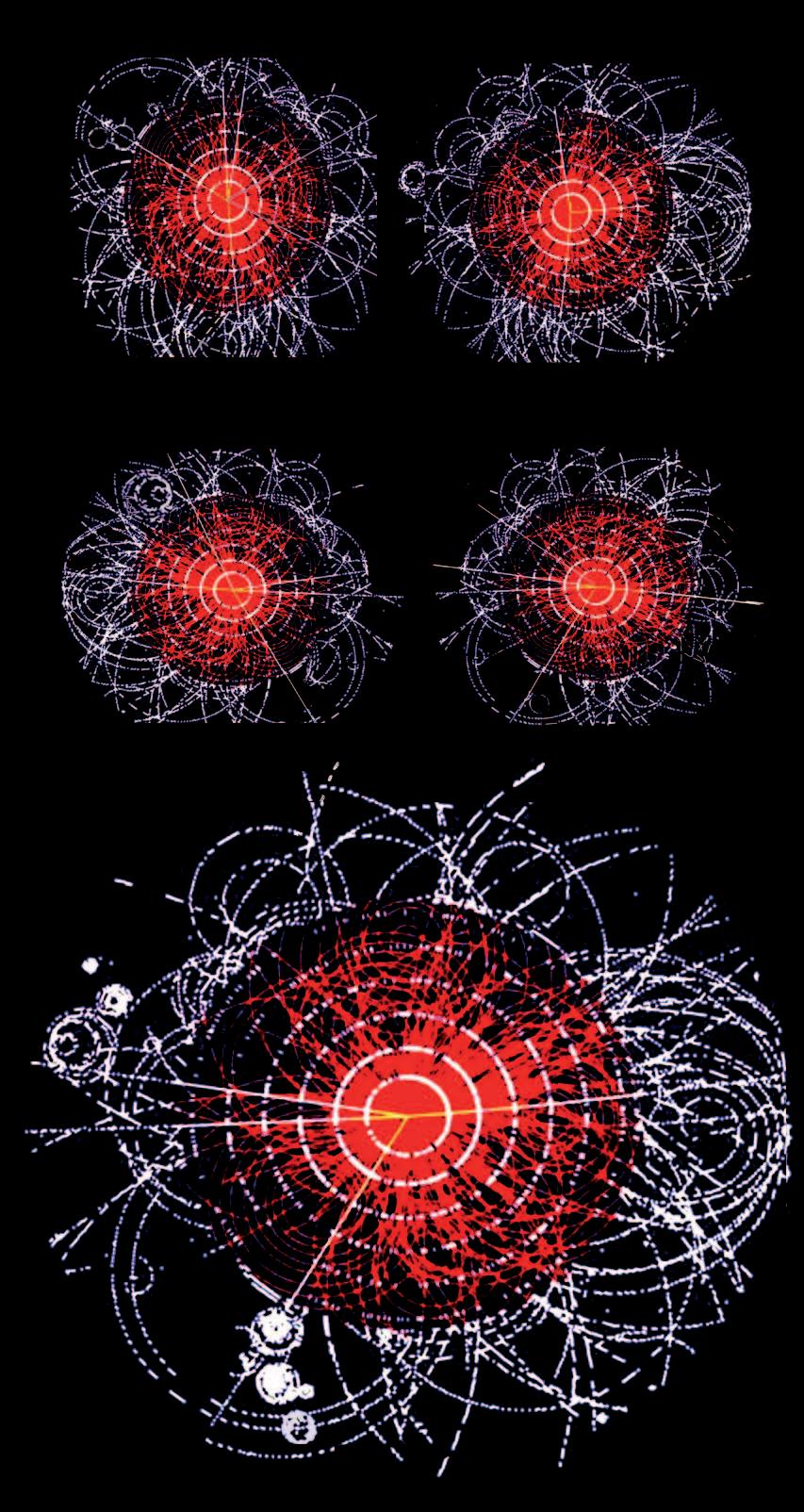
Figura 1. Primer esdeveniment d’ATLAS, pres el 10 de setembre del 2008 a partir d’un feix de l’LHC. L’esdeveniment va ser seleccionat pel sistema d’adquisició de dades en línia d’ATLAS.
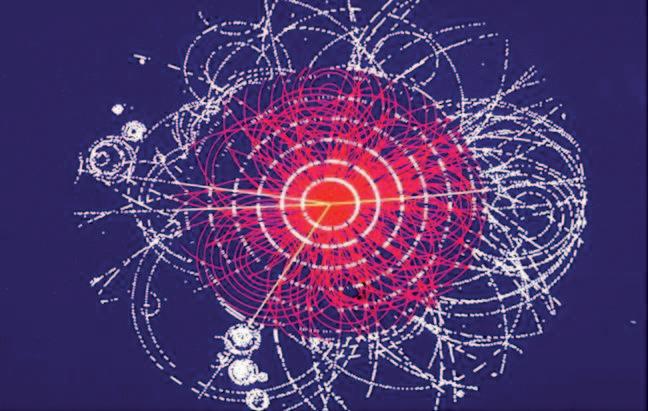
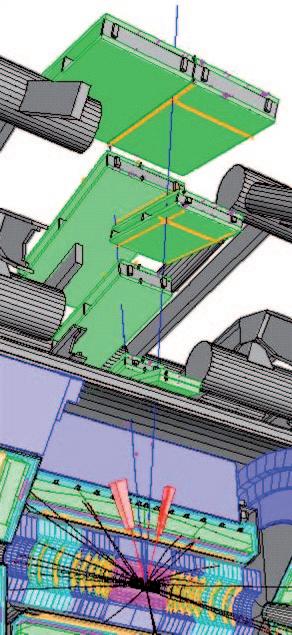
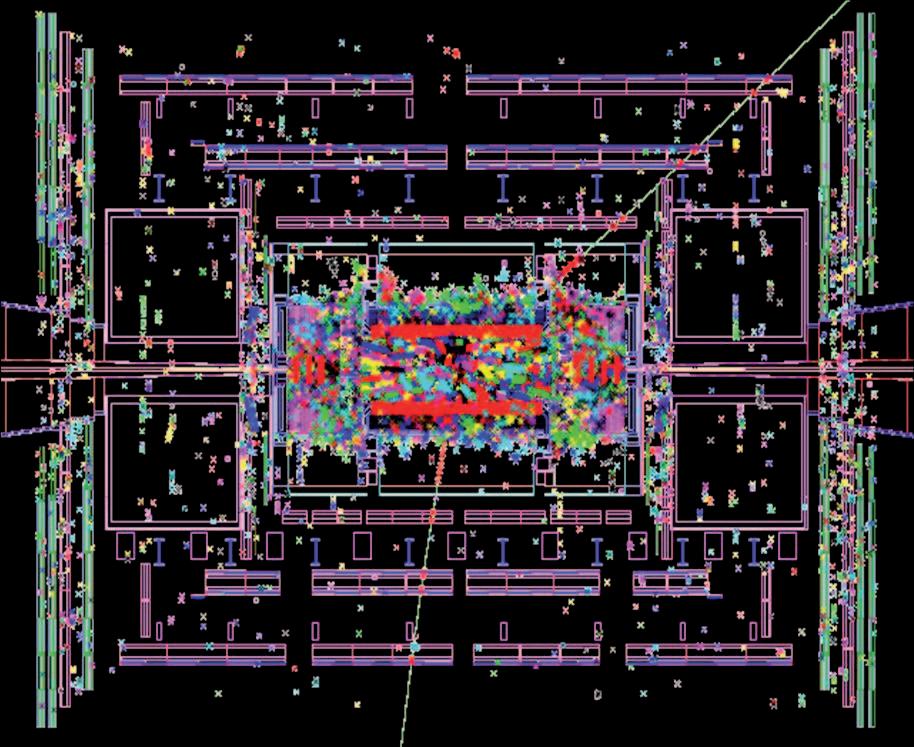
Figura 2. Entorn de producció de partícules a l’LHC. Les línies rectes constitueixen les partícules que es volen seleccionar entre tot el soroll de fons, que està constituït per col·lisions de baixa energia (vint-i-tres en cada interacció).
quines són les forces que en regeixen el comportament?, d’on procedeix la massa de les partícules? Una teoria que actualment engloba la majoria de les interaccions conegudes en física de partícules i que ha tingut molts èxits experimentals és el model estàndard de la física de partícules. En aquest model hi ha unes partícules que constitueixen la matèria (quarks i leptons) i unes altres que són les mediadores entre les diferents forces (el fotó, γ, el gluó, g, i les partícules W i Z). Hi ha, tanmateix, una partícula que prediu aquesta teoria i que no s’ha observat encara: el bosó de Higgs (H). Aquesta partícula explicaria l’origen de la massa dels
4 R evista de T ecnologia , núm. 4 (2011), p. 4-11 • ISSN (ed. impresa): 1698-2045 • ISSN (ed. electrònica): 2013-9861 • DOI: 10.2436/20.2004.01.7 • http://revistes.iec.cat/index.php/ RTEC
avui
la tecnologia
altres components. La cerca del bosó de Higgs serà, precisament, un dels objectius més importants de l’LHC. No serà fàcil aquest estudi, perquè en l’estat final hi haurà moltes partícules de soroll superposades al senyal que es busca (figura 2). A més, és un estudi que s’haurà de fer per a diferents estats finals possibles.
A l’LHC es buscaran més partícules, perquè el model estàndard té problemes per a les interaccions a energies molt elevades. Una teoria amb un comportament millor és la supersimetria o SUSY, en la qual es duplica el nombre de partícules bàsiques que hi ha al model estàndard. A causa de les bones propietats d’aquesta última teoria, l’LHC farà una cerca extensiva de SUSY, intentant determinar estats amb noves partícules supersimètriques.
La teoria supersimètrica està també relacionada amb la matèria fosca, perquè hi ha algunes partícules d’aquesta teoria que són molt bones candidates a components d’aquest tipus de matèria.
Contribució de Catalunya
A l’LHC contribueixen uns cent investigadors experimentals i teòrics de la Universitat de Barcelona, la Universitat Autònoma de Barcelona i l’Institut de Física d’Altes Energies (IFAE). Aquest últim es troba al campus de la Universitat Autònoma de Barcelona.
A l’IFAE es desenvolupen actualment projectes de dos tipus (relacionats amb l’LHC i amb altres àmbits). Un primer bloc està integrat per projectes de física fonamental, com la multitud de línies d’investigació teòrica, els experiments ATLAS i MAGIC (un detector d’astrofísica situat a les illes Canàries) i diferents experiments de neutrins (partícules que interaccionen molt feblement amb la matèria). El segon bloc està constituït per projectes amb aplicació directa de la tecnologia que es desenvolupa en aquesta branca de la ciència. En aquest àmbit hi ha un projecte de detectors de raigs X que es desenvolupa en col·laboració amb hospitals i un projecte de computació que fa servir tècniques amb ús directe en l’empresa i en altres àrees científiques.
el gran col·lisionador d’hadrons
El gran col·lisionador d’hadrons (LHC) és un projecte del Centre Europeu per a la Recerca Nuclear (CERN), que es troba a la frontera francosuïssa, a prop de Ginebra. El CERN es va crear el 1954 i està format per vint estats membres europeus, entre els quals es troba Espanya. Hi ha també altres estats que hi col·laboren puntualment. En total, té uns nou mil usuaris, incloent-hi enginyers i físics.
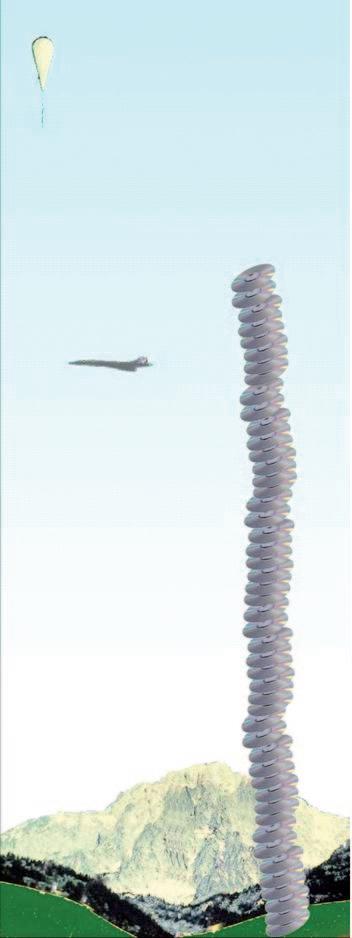
L’LHC és una gran màquina circular (27 km de circumferència), que es troba a uns 120 m sota terra de mitjana (figura 3). Farà col·lisionar protons contra protons a una energia de 14 TeV, un factor 7 més elevada que en màquines anteriors, i amb un flux del feix de protons cent vegades més alt que en projectes anteriors. Amb aquestes
característiques, se cercaran noves partícules més massives (perquè l’energia d’interacció és superior a la de màquines anteriors) i processos poc probables (per l’elevat flux de protons en el feix).
El nivell de radiació serà molt elevat en alguns punts de la màquina (superior a 10 kGy/any en les condicions de funcionament nominals). Per això, molts materials usats en aquest projecte (tant en detectors com en l’electrònica usada) han de ser resistents a la radiació i hi haurà punts d’accés restringit quan la màquina estigui en funcionament.
Hi haurà quatre punts d’interacció on se situaran els experiments: ATLAS, CMS, LHCb i ALICE (figura 3). ATLAS i CMS són experiments de propòsit general, amb objectius molt similars. Cercaran, sobretot, el bosó de Higgs i qualsevol tipus de física nova a l’energia de l’LHC. En canvi, LHCb i ALICE faran estudis més específics: LHCb farà estudis de matèria-antimatèria, mentre que ALICE estudiarà propietats nuclears i necessitarà col·lisions de ions pesants, que també estudiaran ATLAS i CMS.
En els punts d’interacció hi haurà col·lisions cada 25 ns en l’etapa nominal de funcionament i es tindrà una superposició d’uns vint-i-tres successos de baixa energia en cada col·lisió. Els successos interessants s’hauran de cercar amb un elevat soroll de fons, com es pot veure en la figura 2.
La cadena d’acceleració de l’LHC es pot veure de manera esquemàtica en la figura 4. S’hi fan servir màquines prèviament desenvolupades al CERN, com el LINAC (LINear
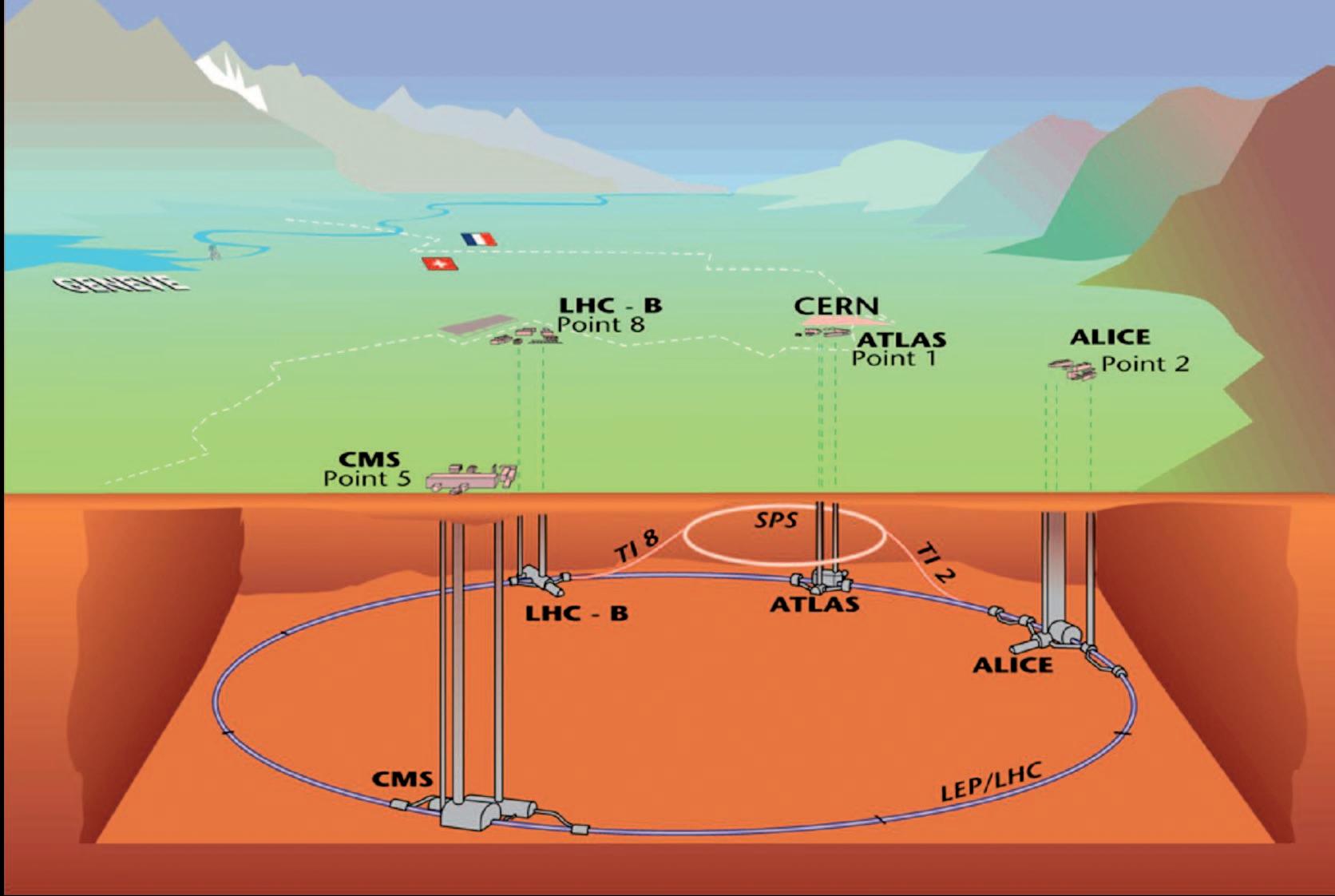
3. Esquema de l’accelerador LHC, amb els quatre detectors principals: ATLAS, CMS, LHCb i ALICE. El complex experimental està situat a la frontera entre França i Suïssa.
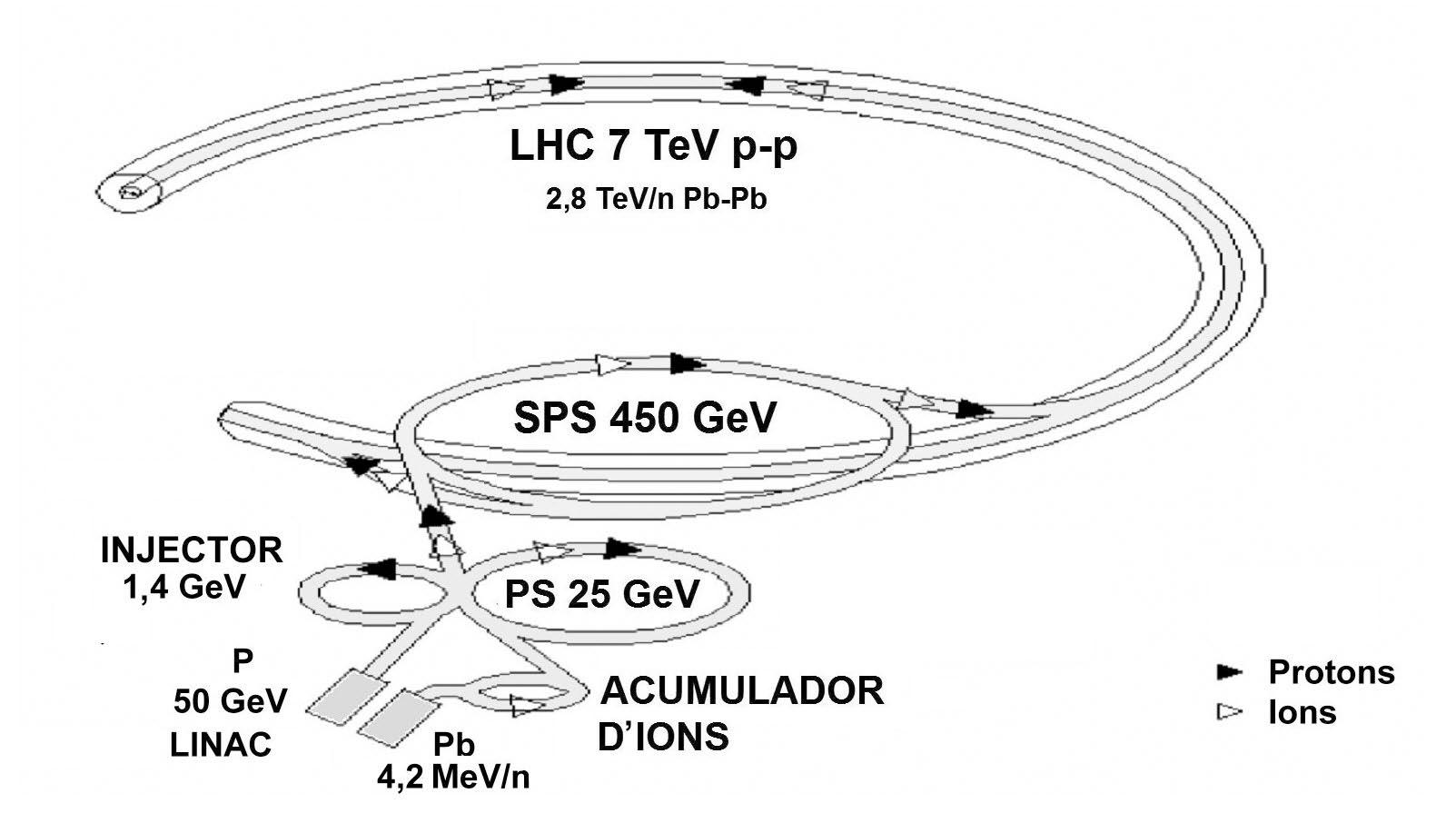
4. Cadena d’acceleració de l’LHC. Les partícules s’injecten des d’altres acceleradors prèviament utilitzats al CERN.
5 ATLAS: un A ein A per de S cobrir LA fí S ic A fon A men TAL de L ’univer S mi T j A nç A n T e L Gr A n c o L · L i S ion A dor d’H A dron S (LH c )
Figura
Figura
Taula 1
Paràmetres importants de l’LHC en les diferents fases de funcionament
Paràmetre Fase A Fase B Nominal
Nombre de paquets 936 2.808 2.808
Espai entre paquets (ns) 75 25 25
Nombre de protons per paquet (1011 protons) 0,4-0,9 0,5 1,15
Angle d’encreuament (µrad) 250 280 280
Mida transversal (µm) 22 16 16
Lluminositat (cm-2s-1) 1032-1033 (1-2) × 1033 1034
Any 2009 2009-2010 2010
ACcelerator), on s’arriba a una energia de 50 MeV; el PS (Proton Synchrotron), amb 25 GeV d’energia dels feixos, i l’SPS (Super Proton Synchrotron), amb 450 GeV d’energia dels protons. La construcció de l’LHC ha aprofitat el túnel d’una màquina anterior que feia col·lisionar electrons i positrons (LEP, Large Electron-Positron Collider).
Una part fonamental de l’LHC són els dipols magnètics que corben la trajectòria dels protons i els confinen en una circumferència de 27 km, on hi ha seccions rectes i corbades. La tecnologia desenvolupada és molt capdavantera i els components tenen propietats molt singulars, com, per exemple, la baixa temperatura de funcionament, 1,9 K (l’LHC serà el lloc més fred de tot l’Univers), que s’aconsegueix amb heli líquid. L’elevat camp magnètic és també molt notable: 8,4 tesla (~105 més elevat que el camp magnètic de la Terra). Finalment, el pes és de 34 tones i hi ha 7.600 km de cable de niobi-titani superconductor.
No només hi ha dipols, també hi ha quadrupols, sextupols i altres components amb correccions d’ordre superior per a la trajectòria del feix. En total, hi ha uns nou mil imants a tot l’LHC.
En la taula 1 es resumeixen els paràmetres més importants de l’LHC en les diferents fases de funcionament, amb evolucions que van incrementant la mitjana de col·lisions en els punts d’interacció. Són importants les següents quantitats:
El nombre de paquets que formen el feix es va incrementant de prop d’un miler a tres milers en la fase nominal. La segmentació en paquets o polsos facilita l’operació amb el feix.
L’espai entre paquets es va reduint (un factor 3 des del començament). D’aquesta manera, passen més partícules per unitat de temps pels punts d’interacció.
El nombre de protons per paquet es va incrementant fins a arribar a ~1011 protons per paquet.
L’angle d’encreuament es va incrementant perquè així hi ha menys inestabilitats coulombianes abans i després de la col·lisió.
La mida del feix es va reduint fins a ~16 mm, tan sols quatre vegades més petit que un cabell humà.
La lluminositat (que és el nombre de partícules per unitat de temps i d’àrea) es va incrementant progressivament.
L’experiment AtLAS
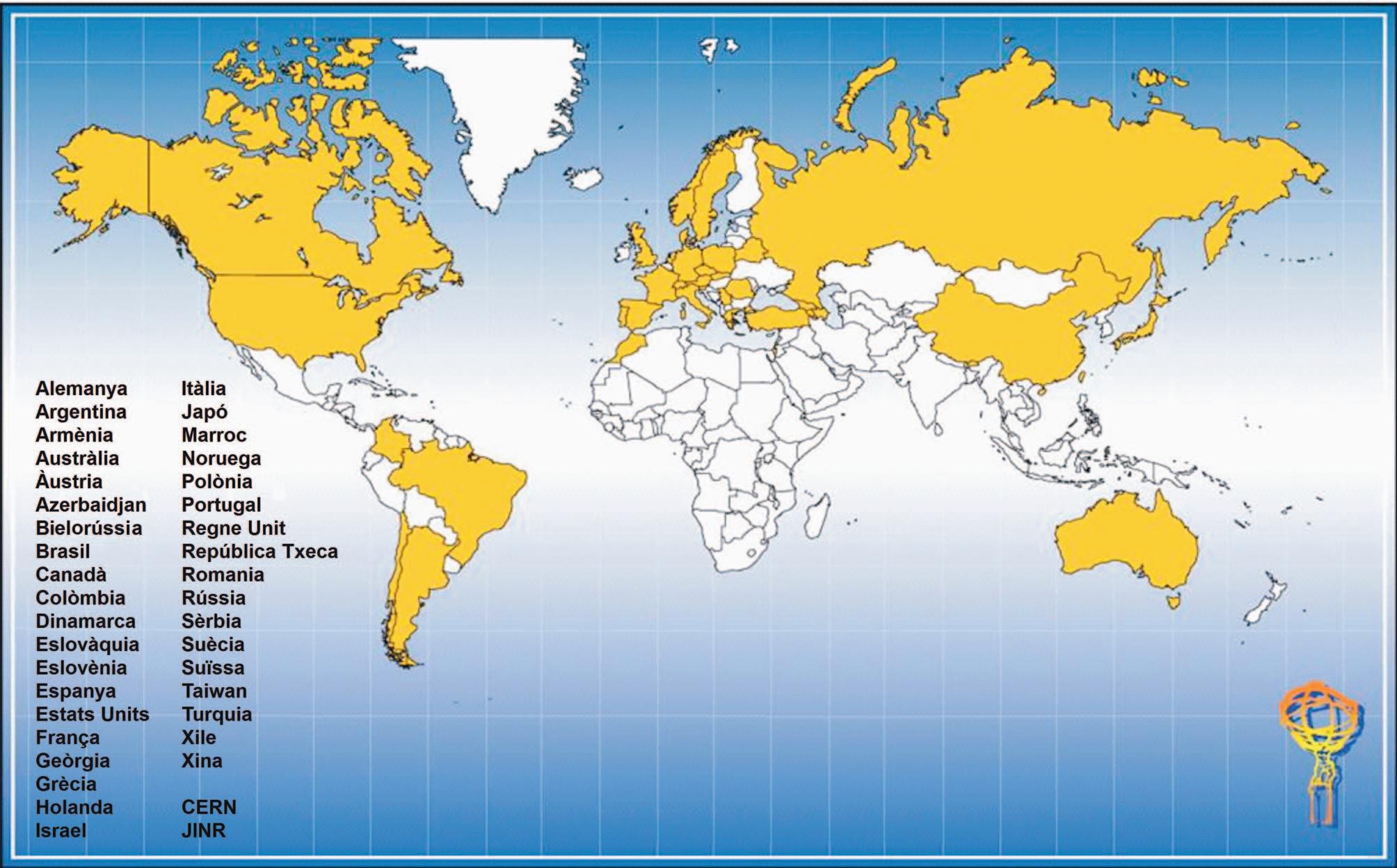
ATLAS (A Toroidal LHC ApparatuS) és un dels experiments que faran una cerca extensiva de física nova a l’LHC. Tal com s’ha mencionat, hi participen uns dos mil autors científics de trenta-set països de tot el món (figura 5). Espanya hi contribueix amb uns setanta-cinc científics.
L’experiment és ubicat a la localitat suïssa de Meyrin, a uns 100 m de profunditat. Té una longitud d’uns 44 m i una amplada de 22 m (figures 6 i 7).
6 m p i LA r cASA do
la tecnologia avui
Figura 5. Participants en la col·laboració ATLAS.
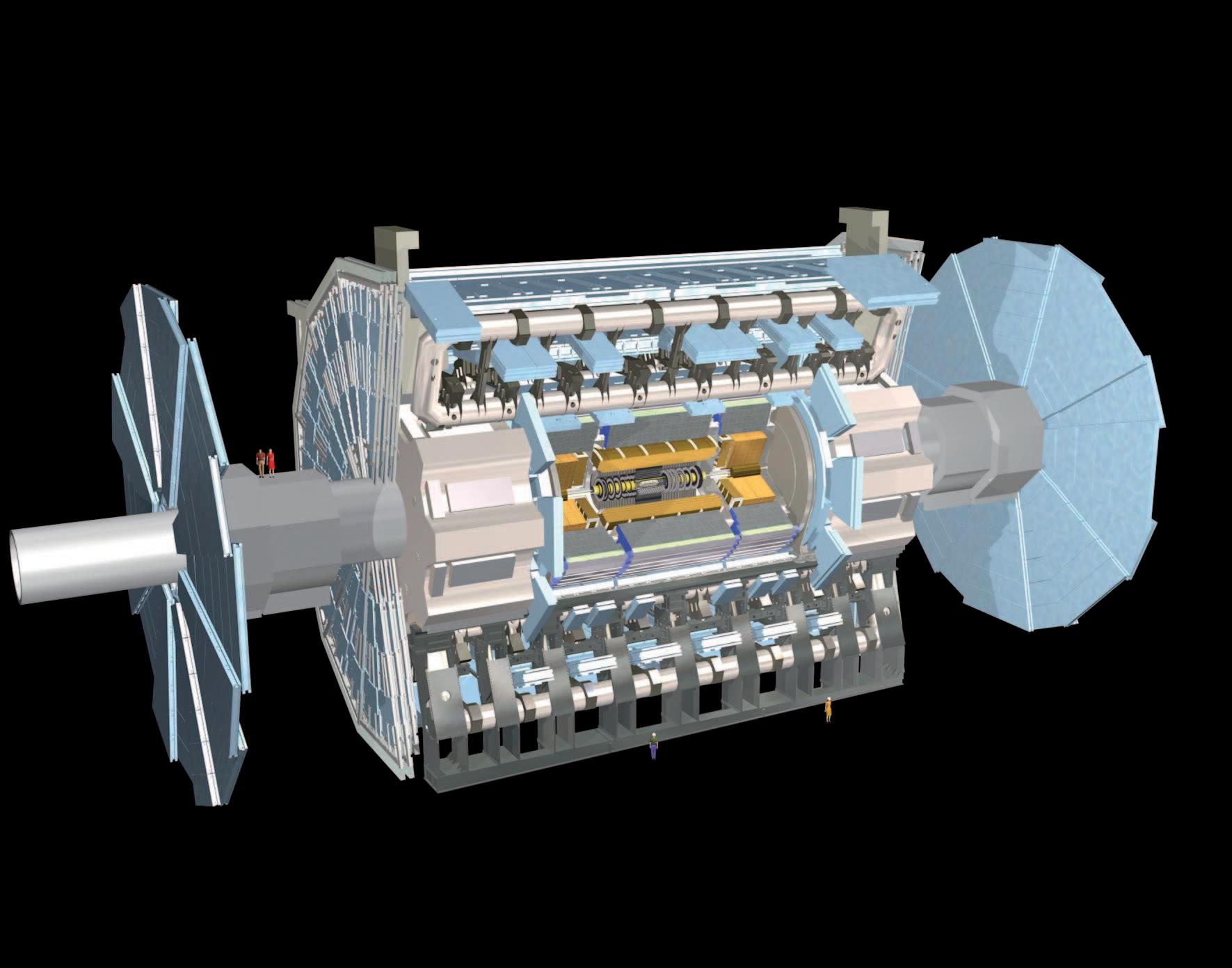
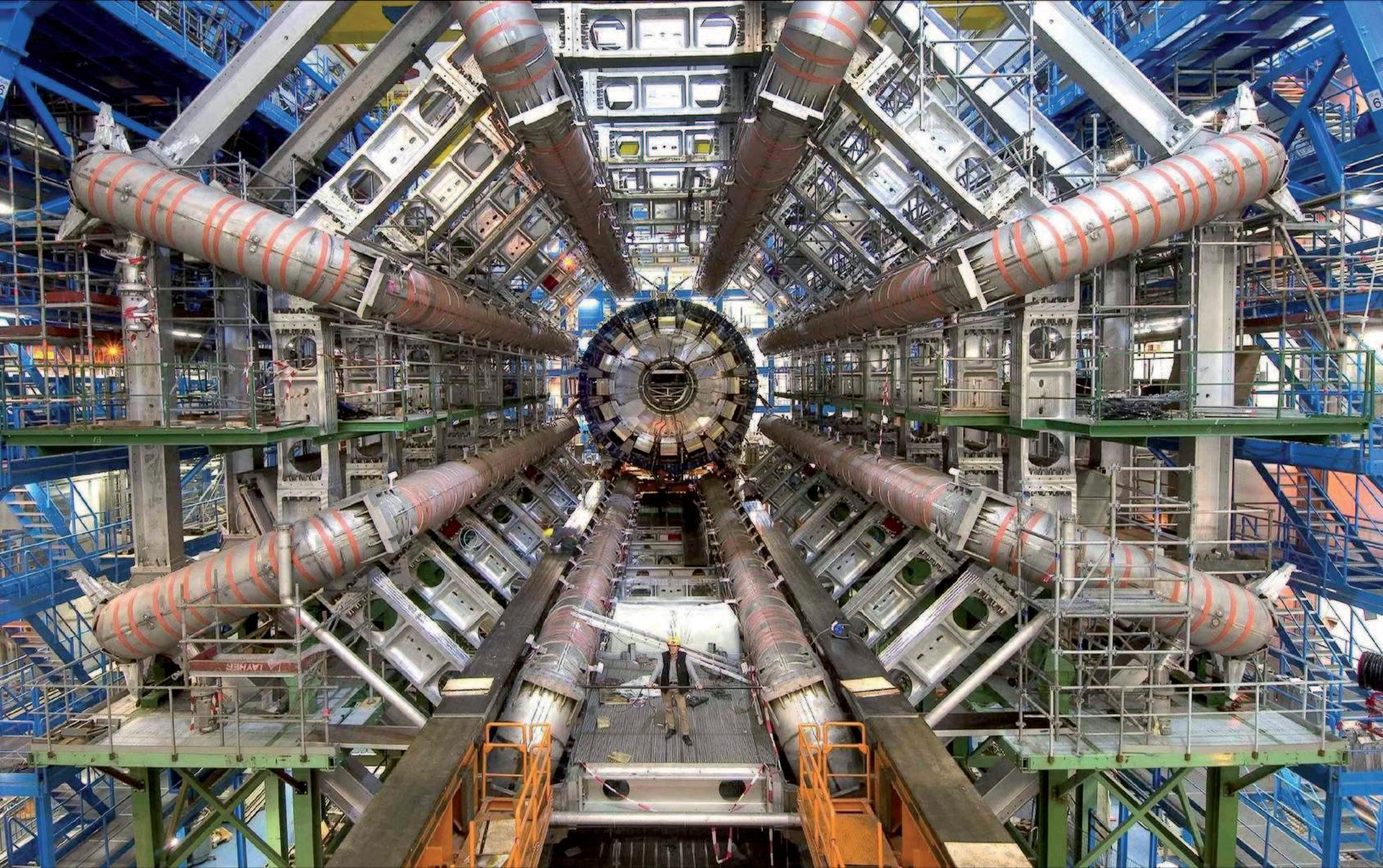
Figura 7. Imatge obtinguda durant el muntatge d’ATLAS. Aquesta estructura proporciona el camp magnètic extern que corba la trajectòria de les partícules carregades que hi arriben, i dóna una bona idea de les dimensions globals del detector. La part central conté actualment diferents subdetectors.
Tant ATLAS com altres experiments de propòsit general estan formats per cilindres concèntrics amb diferents zones especialitzades en la detecció de diferents tipus de partícules. Els subdetectors que el constitueixen són els següents, de fora cap a dins:
L’espectròmetre de muons és a la part externa, ja que únicament els muons poden arribar a aquesta part del detector. El sistema s’intercala amb els imants de la figura 7, que corben la trajectòria dels muons, i d’aquesta manera se’n pot determinar el moment.
Els calorímetres (que mesuren l’energia de les partícules) es poden veure en la figura 8. Hi ha dos tipus de calorímetres: calorímetres electromagnètics, que mesuren l’energia de fotons i electrons, i calorímetres hadrònics, que mesuren l’energia de protons, pions i neutrons.
Els detectors de traces són a la part més interna. Serveixen per identificar traces carregades i s’hi fan servir diferents tecnologies, com detectors de silici. En aquest cas també hi ha un camp magnètic que corba la trajectòria de partícules carregades per tal de determinar-ne el moment.
L’IFAE participa en el calorímetre hadrònic d’ATLAS. Els calorímetres tenen un molt bon comportament per a energies elevades, propietat que els fa imprescindibles en els detectors de l’LHC.
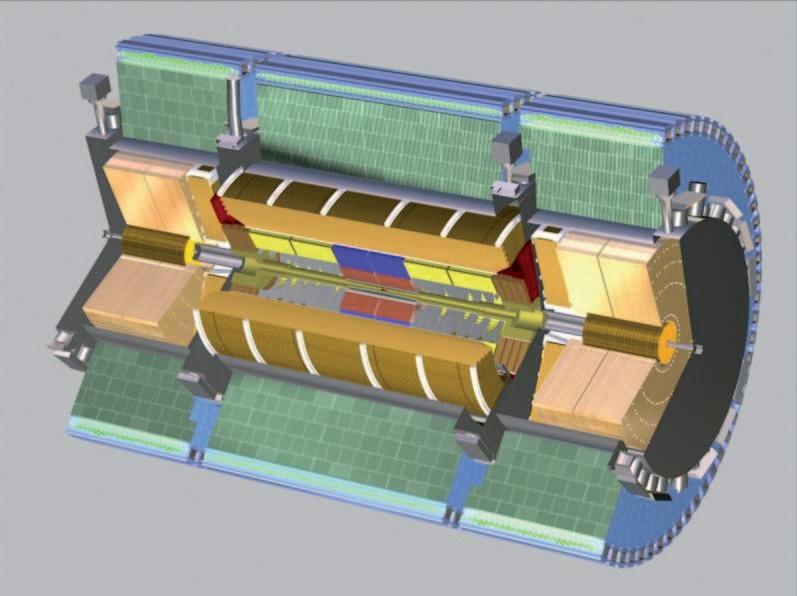
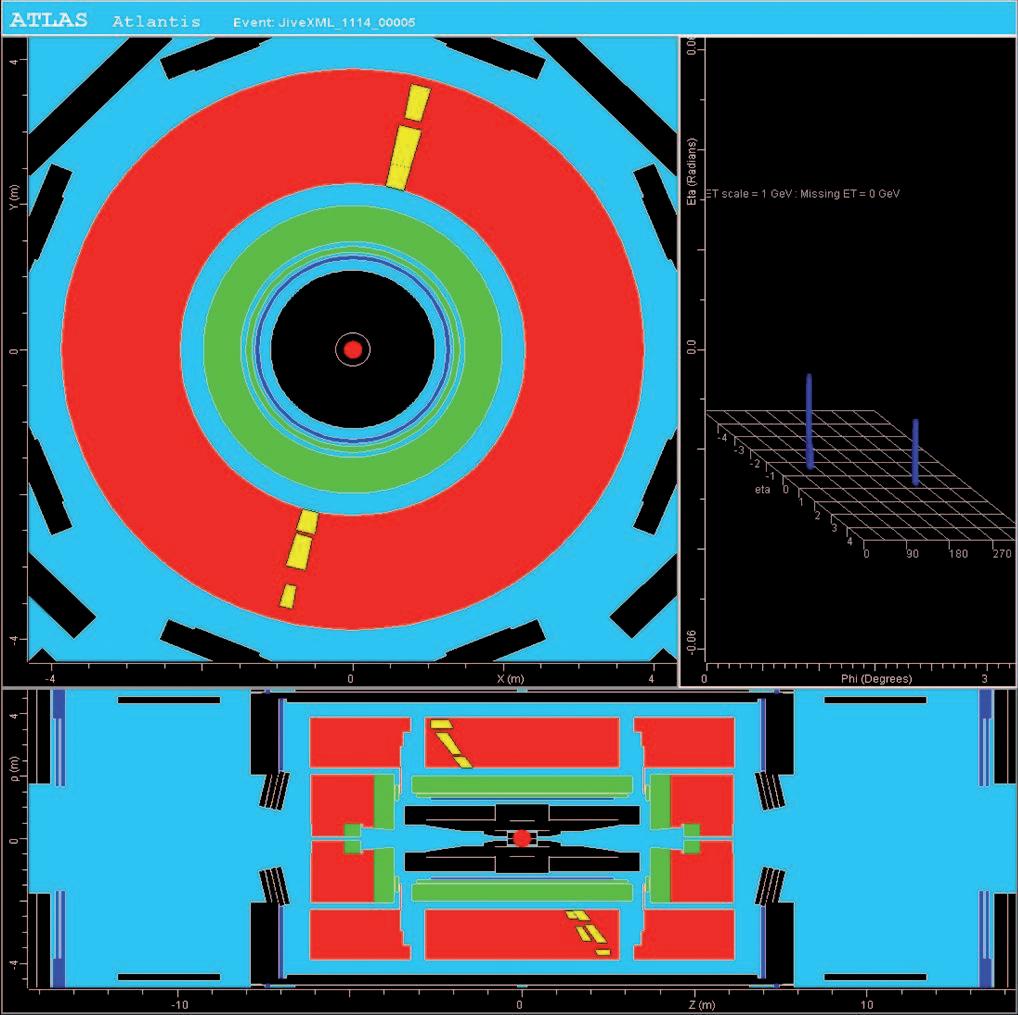
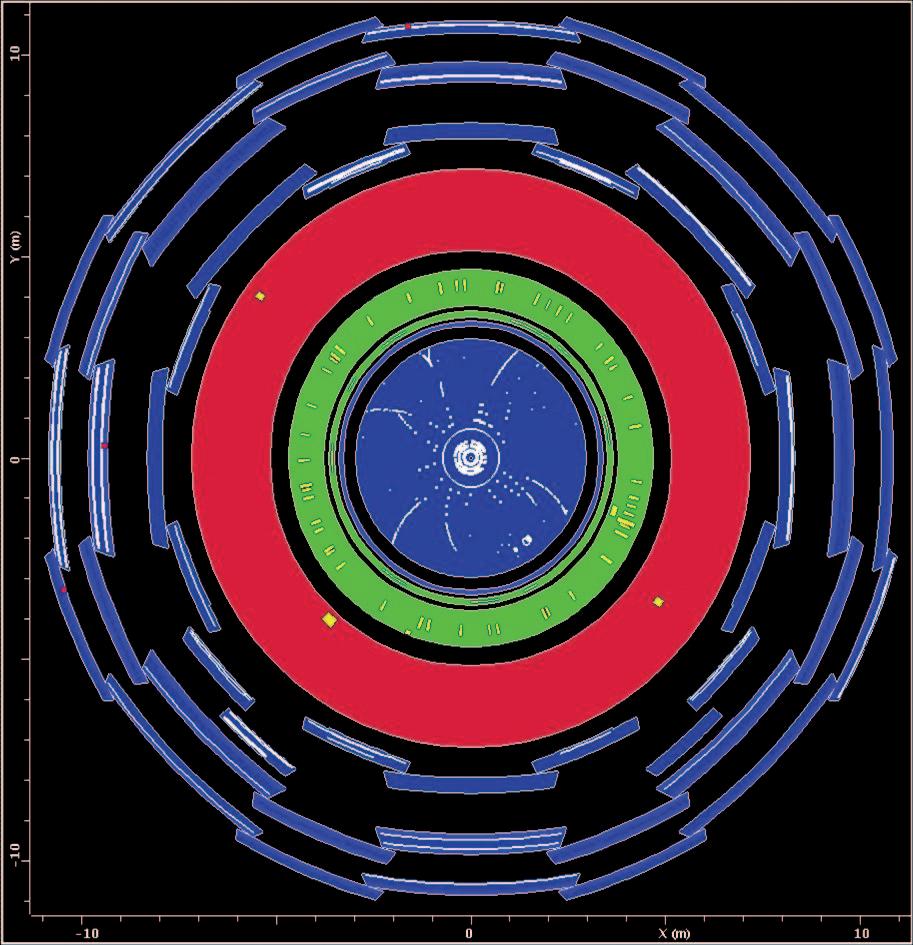
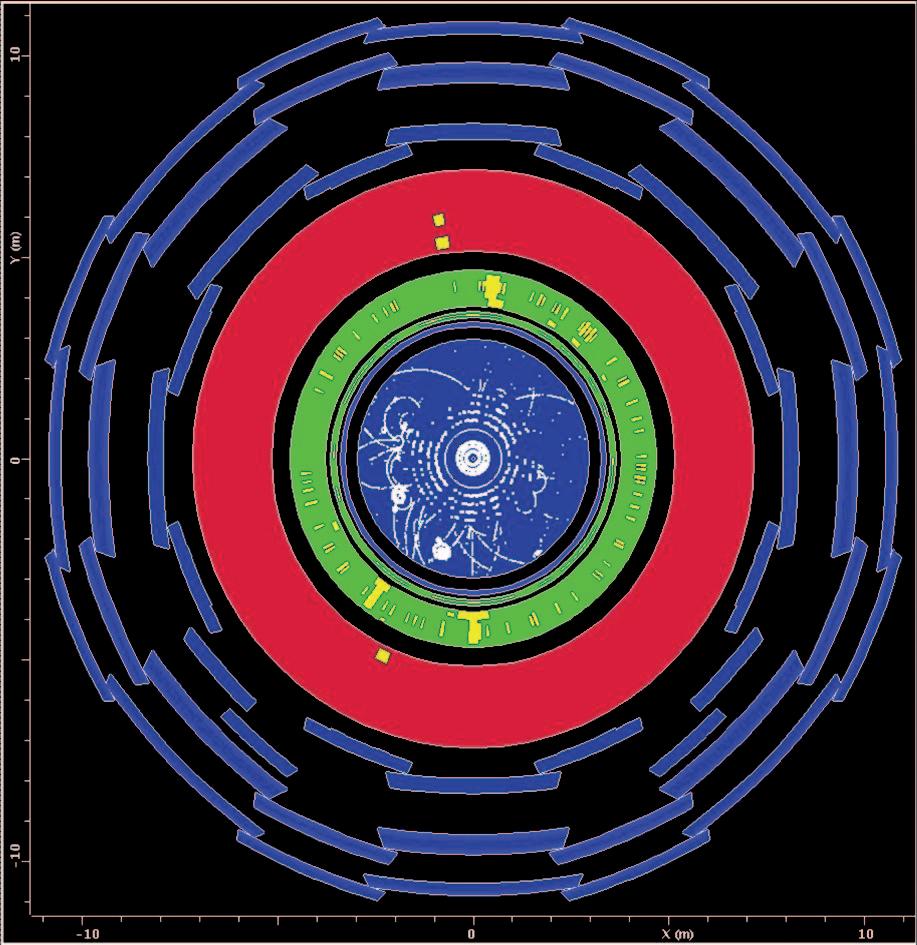
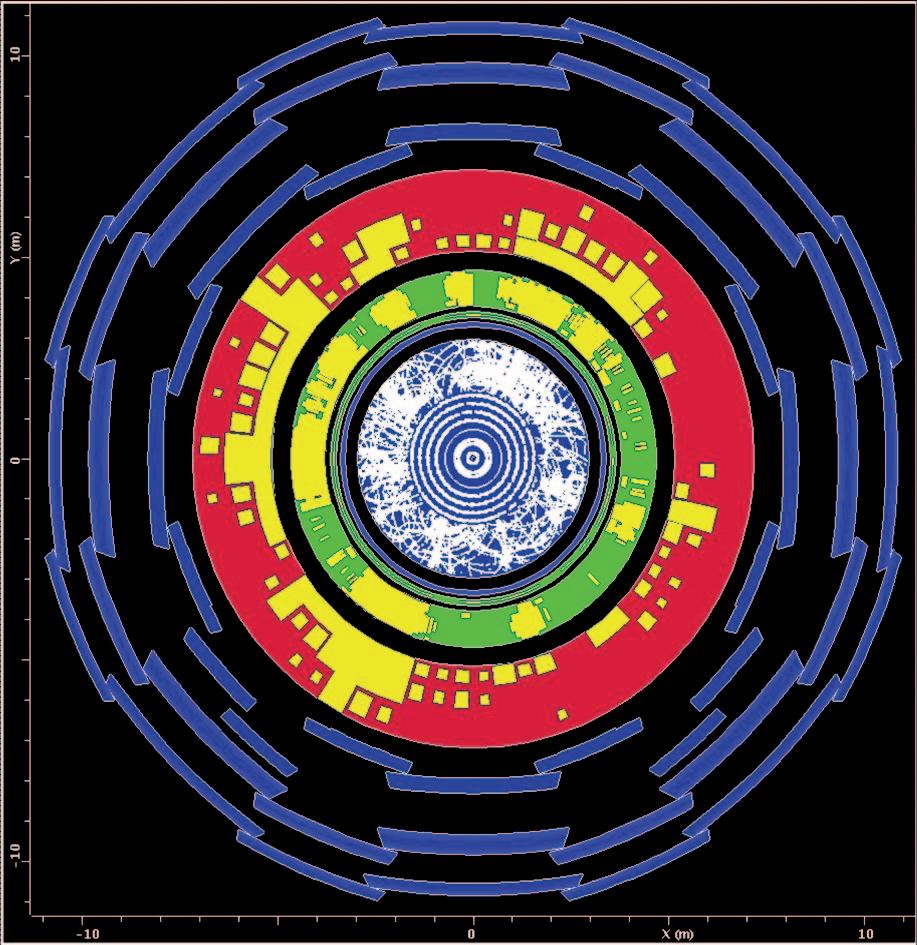
Figura 9. Raigs còsmics vistos amb el calorímetre hadrònic (roig) en una vista transversal (a dalt) i longitudinal (a sota) d’ATLAS.
Un exemple d’observació d’esdeveniments de raigs còsmics, seleccionats amb els calorímetres, es pot veure en la figura 9. Es tracta de successos reals que s’han pres per entendre i calibrar parts del detector i que s’han seguit agafant abans de les col·lisions reals, el 2009. (En la figura 9 es pot veure una partícula que travessa el detector seguint una trajectòria obliqua.)
Una partícula que es produeix al centre d’ATLAS (punt d’interacció) viatja radialment cap a l’exterior. La detecció que es va fent en les diferents parts (diferents subdetectors) depèn del tipus de partícula (figura 10): les partícules neutres (fotons, neutrons...) es detecten en els calorímetres, mentre que les partícules carregades (electrons, muons, protons...) es detecten principalment en els detectors de traces, i algunes també apareixen en els calorímetres. Per exemple, els electrons es detecten en el detector de traces intern i en el calorímetre electromagnètic i els pions es veuen en el detector intern i en el calorímetre hadrònic.
7 ATLAS: un A ein A per de S cobrir LA fí S ic A fon A men TAL de L ’univer S mi T j A nç A n T e L Gr A n c o L · L i S ion A dor d’H A dron S (LH c )
Figura 6. Detector ATLAS.
Figura 8. Calorímetre hadrònic (en verd) i calorímetre electromagnètic (en groc).
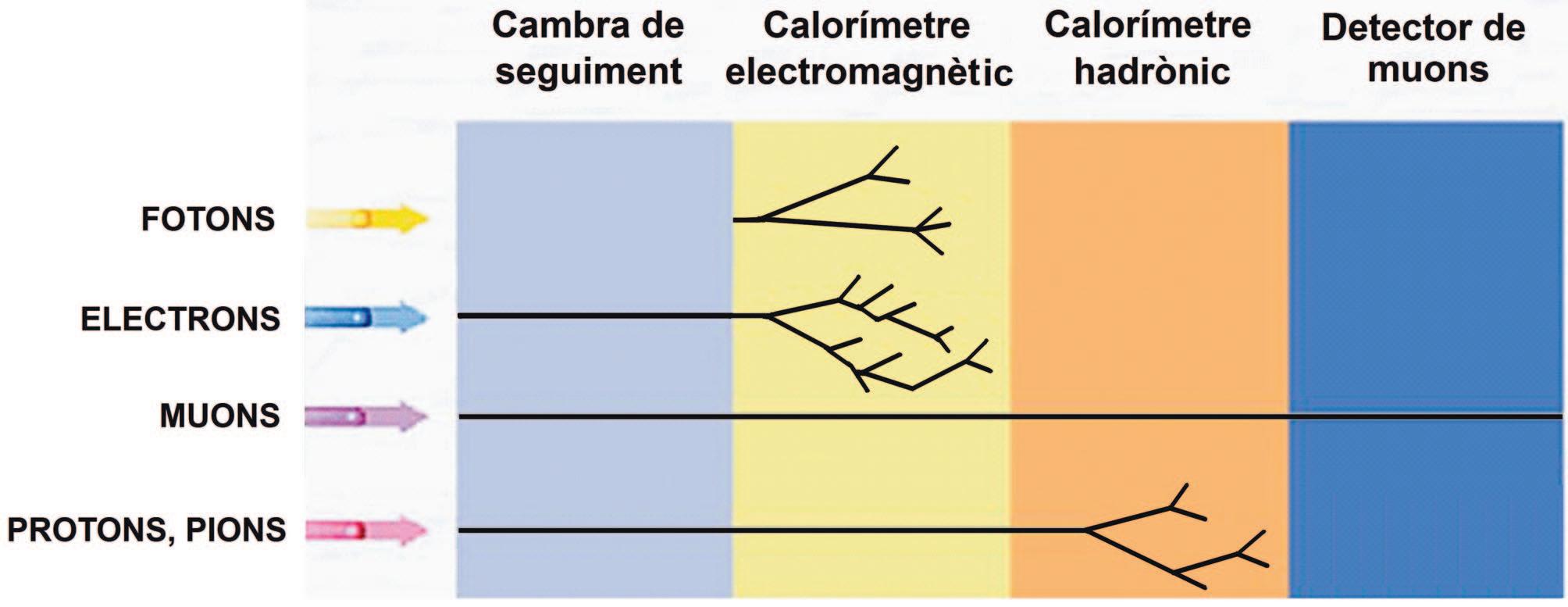
Per la seva banda, els muons són les úniques partícules capaces de travessar tot el detector, ja que dipositen molt poca energia en les diferents parts i arriben a les parts més externes (figura 10).
Mecanisme de selecció de successos en AtLAS
La selecció de successos en línia es fa amb un sofisticat sistema de filtratge anomenat trigger. És fonamental fer una selecció ràpida i adequada perquè els successos descartats no es podran recuperar mai. Aquest procés de selecció està dividit en tres nivells: primer nivell (L1), segon nivell (L2) i tercer nivell o event filter (EF).
El primer nivell és molt ràpid. Està implementat en el maquinari i pren la decisió en un temps típic de 2,5 µs. En aquesta fase no s’utilitza tot el detector, sinó únicament els calorímetres i els detectors de muons, i el sistema de lectura és independent dels canals finals utilitzats per enregistrar les dades que s’analitzaran fora de línia. Mentre es pren la decisió de l’L1, les dades resten emmagatzemades en l’electrònica del detector (els anomenats read out drivers, ROD) i són descartades si la decisió és negativa.
El segon i el tercer nivell s’implementen sobre programari estàndard, amb un temps de decisió de ~10 ms per a l’L2 i uns pocs segons per a l’EF. Aquests dos sistemes són part de la lectura final dels successos, amb la granularitat més fina del detector. S’hi analitza la informació de tots els subdetectors d’ATLAS: detector intern, calorímetres i sistema de muons.
Mentre arriba la decisió de l’L2 i de l’EF, les dades estan en registres especials (read out buffers, ROB) i en disc.
Els següents nombres poden ajudar a captar la magnitud del sistema: 1) la reducció aplicada pels tres nivells és de cinc ordres de magnitud, de manera que d’una entrada de quaranta milions de successos per segon (40 MHz) es passa a 200 Hz; 2) la mida d’un esdeveniment és d’1,5 Mbytes, i 3) la quantitat de dades emmagatzemades en disc és de 9 Pbytes (9 × 1015 Pbytes) a l’any o 1 CD cada dos segons.
Una característica important de la selecció de successos en línia és el funcionament per regions d’interès (ROI), il·lustrat a la figura 11. El primer nivell troba una regió del detector amb activitat destacable (en els calorímetres o l’espectròmetre de muons) i determina el que s’anomena regió d’interès. La posició d’aquesta regió és utilitzada pel nivell següent i únicament s’analitza aquesta part (un petit percentatge del total). El tercer nivell també pot funcionar fent servir les regions que li passa el segon nivell.
La selecció en el segon i el tercer nivell (anomenats tots dos conjuntament high level trigger, HLT) es fa per passos i simultàniament. Si, per exemple, hi ha un possible esdeveniment que comprèn dues regions amb activitat en el nivell 1, no s’analitzarà cada regió separadament, sinó que es farà simultàniament, i en cada pas es veurà si se satisfan certes hipòtesis per determinar si l’esdeveniment s’ha de conservar i propagar a les següents fases, o bé s’ha de refusar.
8 m p i LA r cASA do
Figura 10. Detecció de diferents tipus de partícules en les diferents parts del detector.
Figura 11. Funcionament de la selecció de successos en línia en regions d’interès (ROI).
la tecnologia avui
Figura 12. Volum de dades anuals de l’LHC.
Durant aquest procés d’anàlisi es va reconstruint el succés. A partir de lectures de canals es van formant objectes cada vegada més complexos (com agrupacions de canals, associacions entre diferents parts del detector, partícules, agrupacions de partícules...). La tasca de reconstrucció no acaba en els procediments en línia, sinó que continua fora de línia després que les dades potencialment interessants s’hagin acceptat i emmagatzemat a l’exterior del detector (en discos i cintes). Els objectes finals serveixen per validar o eliminar teories que descriuen la interacció entre els components fonamentals de la matèria.
Xarxa de computació en AtLAS
La xarxa de computació desenvolupada per als experiments de l’LHC és el resultat de l’esforç d’una col·laboració internacional, amb unes dimensions d’emmagatzematge de dades, ús de processador i capacitat del programari utilitzat sense precedents.
Les tècniques informàtiques de graella de càlcul s’han desenvolupat notablement amb l’ús extensiu que se n’ha fet a l’LHC, i l’experiència obtinguda d’aquest gran banc de proves s’ha incorporat al món de la indústria.
Tal com s’ha comentat anteriorment, el volum de dades generades a l’any serà de 10-15 Pbytes. Tenint en compte la capacitat d’un CD-ROM, això equival a uns 20 km de discos compactes a l’any (figura 12).
El sistema global de processament de dades a l’LHC està organitzat, a escala mundial, en els següents nivells (tiers): Tier-0 (CERN), Tier-1 (onze centres) i Tier-2 (més de dos-cents centres). El Tier-0 emmagatzema les dades tal com arriben del detector i en fa la primera reconstrucció i la distribució als centres que formen el Tier-1. Els Tier-1
tenen una còpia de part de les dades i les reprocessen (fan la reconstrucció d’esdeveniments en més detall) i les analitzen. Finalment, els Tier-2 desenvolupen processos de simulació de teories que expliquin les dades obtingudes i proporcionen el suport d’estudi als físics.
exemples de successos que esperem a AtLAS
A continuació, veurem alguns esdeveniments obtinguts amb simulació que esperem observar amb ATLAS:
En la figura 13 tenim un exemple de successos que s’han estudiat molt en experiments anteriors: col·lisions amb poca transferència d’energia entre l’estat inicial i el final. Tindrem uns vint-i-tres successos d’aquest tipus en cada col·lisió del detector, i s’eliminaran perquè no proporcionen informació nova. De tota manera, a l’inici de l’LHC, aquests esdeveniments ben coneguts són útils per verificar els detectors i els seus paràmetres de funcionament.
En la figura 14 tenim un esdeveniment amb una Z (un mediador entre les interaccions conegudes), que decau en dos electrons. Aquest succés és interessant perquè permet calibrar el detector. Serà el punt d’inici d’estudis més avançats amb les primeres dades que es prenguin.
En la figura 15 tenim un esdeveniment amb manca d’energia en el pla que es mostra (les dues partícules que arriben als espectròmetres de muons no formen un angle de 180º). Els successos de supersimetria són d’aquesta forma i una observació d’aquest tipus podria indicar física nova més enllà del model estàndard.
En la figura 16 tenim un esdeveniment amb molta activitat en tot el detector. Es podria tractar d’un microforat
9 ATLAS: un A ein A per de S cobrir LA fí S ic A fon A men TAL de L ’univer S mi T j A nç A n T e L Gr A n c o L · L i S ion A dor d’H A dron S (LH c )
Figura 14. Col·lisió amb la producció de Z ee. Calibratge i verificació del detector.
Figura 13. Col·lisió descartable amb baixa transferència d’energia.
17. Vista longitudinal d’un esdeveniment amb bosó de Higgs que produeix dos electrons i dos muons a l’estat final (superposat al soroll de col·lisions de baixa energia).
negre, que, en cas de produir-se, s’evaporaria molt ràpidament sense perill per a l’experiment, però també seria un clar indicador de física nova.
Finalment, en la figura 17 tenim un dels esdeveniments que més se cercaran a l’LHC: un succés (o esdeveniment) amb bosó de Higgs amb electrons i muons a l’estat final. El succés es mostra superposat al soroll de fons que l’acompanyarà. Els altres esdeveniments tindran un nivell de soroll de fons similar.
En la figura 18 es mostra una visió possible de les oportunitats de descobriments que l’LHC pot oferir. En general, s’espera tenir accés a partícules de massa més elevada i a teories que apareixen a escales d’energia més altes que les d’acceleradors anteriors.
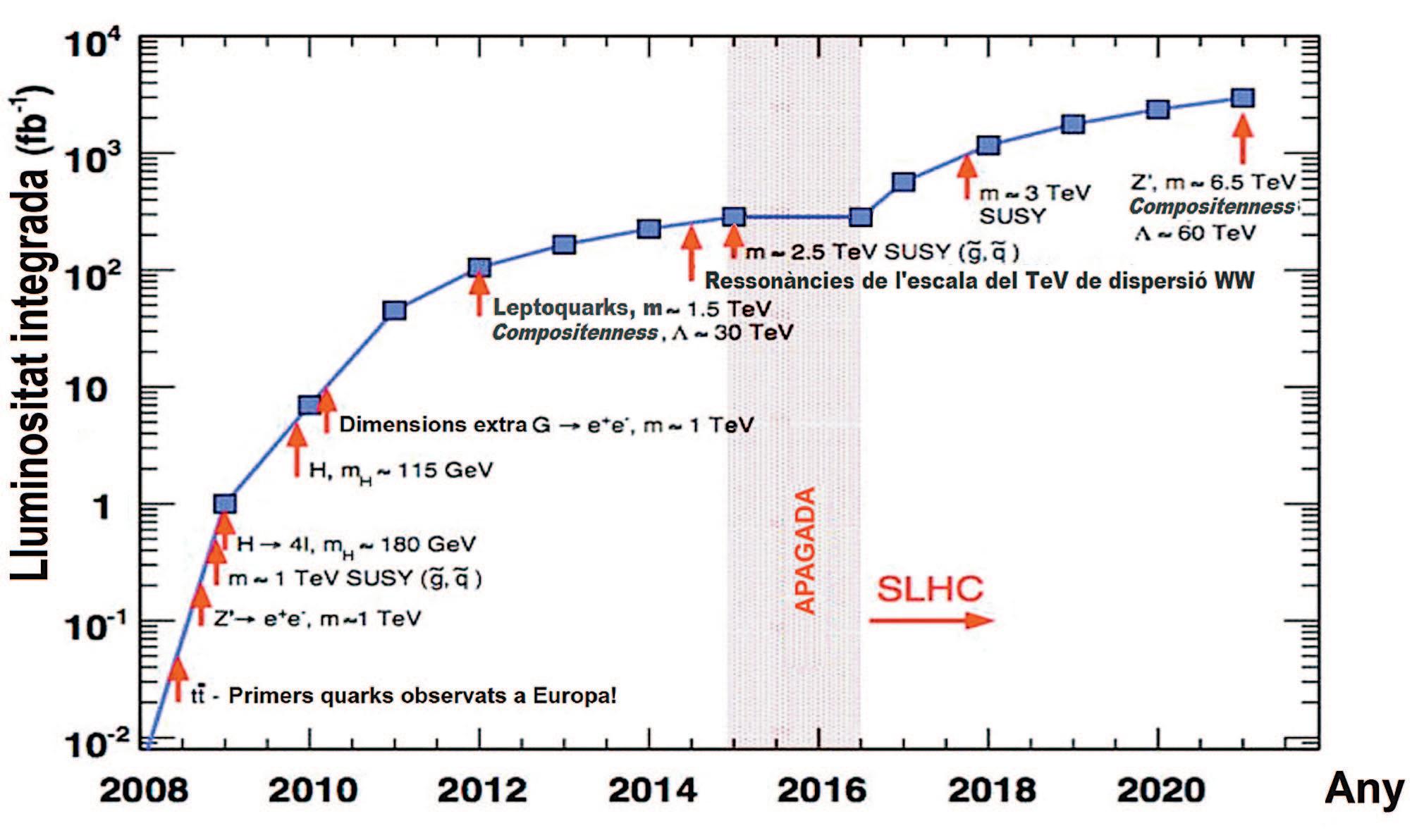
A partir del 2016, es preveu una segona fase de l’LHC, el Super LHC, amb un increment de lluminositat d’un ordre de magnitud respecte de l’LHC. Amb aquesta millora (no gaire complicada) es disposarà de més esdeveniments per estudiar la física de partícules.
Aplicacions de la tecnologia desenvolupada
Un projecte que s’està duent a terme a l’IFAE actualment és la construcció d’un detector per a mamografies (figura 19) que funciona amb una dosi molt més baixa que la dels actuals aparells i que, a més, permet obtenir imatges per irradiacions amb diferents energies. Aquest projecte està actualment en fase de comercialització i ja hi ha empreses interessades en el seu ús.
La tecnologia desenvolupada en els acceleradors també s’aplica en teràpies oncològiques. El CERN participa en
10 m p i LA r cASA do
Figura
Figura 18. Visió de les oportunitats de l’LHC al llarg dels anys de funcionament.
Figura 15. Esdeveniment amb manca d’energia en el pla observat (compatible amb supersimetria).
la tecnologia avui
Figura 16. Esdeveniment amb molta activitat en els detectors de traces i els calorímetres (compatible amb un microforat negre).

aplicacions d’aquest tipus i hi ha nombrosos països que estan duent a terme estudis relacionats amb aquest camp. Els teixits malignes presenten diferents propietats quan s’irradien amb feixos de protons i és possible fer decréixer l’extensió dels tumors cancerosos.
Les eines informàtiques utilitzades en la física d’altes energies han tingut un notable impacte en tota la societat. Un dels exemples més notables és la navegació mitjançant enllaços per Internet (la WWW), que es va desenvolupar al CERN per resoldre les necessitats de comunicació entre els científics de tot el món.
Actualment, les tecnologies grid s’han desenvolupat moltíssim, per la necessitat de processar una quantitat ingent de dades, amb un processador molt potent i fent servir un programari molt complex.
Conclusions
Els projectes ATLAS i LHC són esforços internacionals en què participen científics de tot el món. A ATLAS hi collaboren uns vuitanta físics espanyols (l’IFAE contribueix al calorímetre, a la selecció de successos en línia, a la reconstrucció i a l’anàlisi, a més de participar en múltiples línies d’investigació teòriques).
Amb l’LHC es tindrà accés a una nova regió d’energia, amb possibilitats d’importantíssims descobriments en la física de partícules.
La tecnologia desenvolupada per a aquests experiments té una notable aplicació en la societat actual; per exemple, en detectors de baixa radiació, teràpies contra el càncer i aplicacions de computadors. ■
11 ATLAS: un A ein A per de S cobrir LA fí S ic A fon A men TAL de L ’univer S mi T j A nç A n T e L Gr A n c o L · L i S ion A dor d’H A dron S (LH c )
Figura 19. Prototipus d’aparell de mamografia amb baixa dosi per a la pacient i selecció d’energia de radiació.
la
TECNOLOGIES EMERGENTS p ER A LA INDÚSTRIA ALIMENTÀRIA
Mercè Raventós Universitat Politècnica de Catalunya
Introducció
Es pot dir que la indústria alimentària comença en el moment en què s’inventa la primera eina, i d’això, ja en fa molts anys. Avui, com ahir, l’objectiu fonamental continua essent preparar, preservar, condicionar i transformar en aliments les matèries primeres que la terra i el mar ens ofereixen.
Amb el temps, el progrés tècnic ha fet possible no tan sols el desenvolupament de procediments originals per a la conservació dels aliments, sinó també l’aplicació de nous criteris inherents a les necessitats i tendències dels nous consumidors. De fet, subministrar aliments a la població és encara una preocupació fonamental per a l’home al segle xxi, i, en aquest sentit, la tecnologia hi té un paper molt important.
Són els professionals de les indústries alimentàries els que contribueixen que els aliments siguin, alhora, produïts en quantitat suficient per abastar una població creixent; segurs per garantir una qualitat que doni confiança als consumidors; econòmics, o al cost mínim, perquè siguin assequibles a la majoria de la població, i sans i màximament adequats tant des del punt de vista nutricional, amb una durabilitat òptima que en permeti una distribució fàcil sense que es malmetin, com des del punt de vista organolèptic (fent referència al sabor, olor, color i textura, entre d’altres). Tot plegat, sense oblidar l’interès per l’aplicació de tecnologies que siguin cada cop més respectuoses amb el medi ambient.
El gran desenvolupament de la indústria alimentària iniciat al segle xix i completat al segle xx la configura com el primer sector industrial en la majoria dels països del món. El desenvolupament de línies de producció cada cop més grans exigeix l’aplicació de coneixements i tècniques que ja s’empren en altres àrees de l’enginyeria més consolidades (industrial, química, etc.). Així mateix, l’interès per diversificar els productes i millorar-ne la qualitat impulsa en la indústria d’equips una forta activitat per a la indústria alimentària per tal de donar suport a les exigències de les noves tecnologies.
La demanda creixent d’aliments mínimament processats que, a la vegada que segurs, conservin les característiques originals i alhora respectin les exigències mediambientals justifica el desenvolupament de certes
tecnologies per a la conservació i la transformació dels aliments.
Així, emergeixen nous processos que utilitzen tractaments no tèrmics i que, per tant, no malmeten els components termosensibles dels aliments, com l’alta pressió hidrostàtica (APH) i els polsos elèctrics d’alta intensitat de camp (PEAIC), que es presenten breument en aquest article, o la mateixa irradiació d’aliments. De fet, els nous mètodes no tèrmics de conservació d’aliments són objecte d’una recerca intensa a fi d’avaluar-ne el potencial com a procés alternatiu o complementari als mètodes més tradicionals de conservació d’aliments.
D’altra banda, la indústria agroalimentària està cercant les millors tècniques de separació per tal d’obtenir extractes naturals de gran puresa, que són utilitzats en una gran diversitat d’aplicacions. Això és degut a què les tecnologies actuals per a l’obtenció d’extractes alimentaris generalment utilitzen dissolvents orgànics, que comporten un cert risc per la seva toxicitat, el seu poder inflamable i els residus que generen. Per això, es continuen desenvolupant tecnologies més respectuoses amb el medi ambient, que representin menys risc per a la salut i que garanteixin una qualitat superior dels productes, com és el cas de l’extracció amb fluids supercrítics. Es presenten aquí breument l’extracció amb fluids supercrítics i les tecnologies de membranes.
Referent a les membranes amb permeabilitat selectiva, és a dir, les que només deixen passar a través seu determinades molècules, presenten sens dubte un gran interès per a la indústria alimentària. Ja s’apliquen des de fa anys, tot i que es continuen considerant com una tecnologia emergent perquè contínuament en surten nous materials i noves aplicacions. Algunes de les membranes disponibles separen les molècules d’aigua de la resta de components dels aliments líquids, amb la qual cosa s’aconsegueix una concentració d’aquests components. Altres membranes poden separar molècules per grandària, i així s’obté alhora concentració i fraccionament.
D’altra banda, la concentració d’aliments líquids, quan es duu a terme per congelació, implica una reducció de la temperatura del producte de manera controlada amb l’objecte d’aconseguir una congelació parcial fins a obtenir una barreja de cristalls de gel en un fluid
12 R evista de T ecnologia , núm. 4 (2011), p. 12-21 • ISSN (ed. impresa): 1698-2045 • ISSN (ed. electrònica): 2013-9861 • DOI: 10.2436/20.2004.01.8 • http://revistes.iec.cat/index.php/ RTEC
tecnologia avui
concentrat. Aquests cristalls de gel, si s’han format en condicions apropiades, seran molt purs, és a dir, contindran molt poc producte incorporat. La separació d’aquests cristalls purs de gel, ja sigui per centrifugació o per alguna altra tècnica, porta a aconseguir un producte cada vegada més concentrat.
Pel que fa a la concentració per congelació, que és aplicable a molts aliments, ja s’utilitza comercialment per concentrar suc de taronja, vinagre, cervesa i vins; també s’ha utilitzat per a la concentració d’extracte de cafè i te, xarops de sucre o productes lactis, com ara la llet o el xerigot. La crioconcentració permet obtenir els millors resultats en la concentració de begudes alcohòliques. Es tracta, doncs, d’una tecnologia emergent que té com a avantatges principals les baixes temperatures del procés i l’absència de la interfície líquid-vapor en la separació. Aquesta operació a baixa temperatura permet, encara més que en la tecnologia de membranes, la concentració d’aliments tèrmicament sensibles, sense que es produeixi cap pèrdua de qualitat, d’aromes o de components volàtils, com succeïa en l’evaporació. Cal treballar força encara per tal d’obtenir equips que resultin viables des del punt de vista industrial.
Actualment, també és important l’aplicació de tecnologies senzilles per a l’elaboració de productes mínimament processats, que permet obtenir aliments, com ara fruites i verdures, que poden ser consumits directament sense modificar-ne les característiques originals.
Igualment, hi ha altres aspectes molt importants que són clarament emergents i que, si bé no són tractats específicament, cal no oblidar. Per exemple, totes les tecnologies que permeten millorar el control i l’automatització dels processos i, en concret, l’ús dels biosensors, que tant està ajudant a garantir la seguretat dels processos; les noves tècniques de bioluminescència, o el tractament per imatges, o la visió artificial, entre d’altres; les tècniques avançades d’envasament d’aliments com a operació necessària per protegir els aliments en la seva conservació; els nous materials que s’estan desenvolupant, sobretot plàstics polimèrics; els films flexibles que permeten modificar l’atmosfera de l’envàs, per exemple en fruites i verdures; els envasos actius; els envasos intel·ligents, etcètera.
tractaments per altes pressions en la conservació i la transformació dels aliments
Definició del procés
S’entén per alta pressió la tecnologia amb què els materials són tractats a pressions entre els 100 MPa i 1.000 MPa. Atès que el medi utilitzat per transmetre la pressió acostuma a ser l’aigua, el tractament d’altes pressions també s’anomena usualment alta pressió hidrostàtica (APH). En incrementar la pressió, es produeix un descens en el volum de l’aigua, però molt petit en comparació amb el descens de volum que poden experimentar els gasos. El descens de volum de l’aigua és, aproximadament, del 4 % a 100 MPa,
del 7 % a 200 MPa i de l’11,55 % a 400 MPa, a una temperatura de 22 ºC.
Com que l’alta pressió s’utilitza en els aliments per millorar-ne la qualitat microbiològica i les característiques fisicoquímiques i sensorials, s’han d’escollir les condicions de tractament més adequades, segons quin sigui l’objectiu prioritari. Com ja s’ha dit, les pressions utilitzades generalment en el tractament d’aliments per APH acostumen a ser d’entre els 100 MPa i els 1.000 MPa. El temps d’aplicació de la pressió pot oscil·lar entre uns pocs minuts i algunes hores i la temperatura de tractament pot anar dels –20 ºC als +90 ºC. En la taula 1 es presenten els principals efectes del tractament d’alta pressió en els aliments.
Taula 1
Efectes principals del tractament d’alta pressió en els aliments
Pressió (MPa)
> 200 MPa
> 300 MPa
> 400 MPa
> 500 MPa
Efectes
Influència sobre la cinètica enzimàtica
Modificació de les propietats físiques de les proteïnes
Alteració de la membrana dels microorganismes
Inactivació enzimàtica irreversible
Mort dels microorganismes
Gelificació dels midons
Desnaturalització de les proteïnes
Mort de les espores bacterianes
Inactivació dels enzims
Camp d’aplicació
Entre els nous mètodes de conservació dels aliments, l’alta pressió és probablement la tecnologia més desenvolupada comercialment. L’atractiu principal d’aquesta tecnologia és que, en poder-se realitzar el tractament a temperatura ambient, es conserven els paràmetres de qualitat del producte original.
Quan un aliment és sotmès a alta pressió, s’hi observen principalment els efectes següents: modificació del volum del sistema, modificació de l’estructura del midó i les proteïnes, modificació de l’activitat enzimàtica i inactivació dels microorganismes. En la taula 1 es mostren les condicions generals de pressió en què es manifesten aquests efectes, tot i que, a la pràctica, aquests efectes són molt variables segons l’aliment tractat i cada cas particular requereix un estudi concret.
Inicialment, l’avantatge principal del tractament d’alta pressió era que es podia utilitzar com a substitut parcial o total del tractament tèrmic quan l’objectiu era la destrucció microbiana. Per exemple, en les aplicacions a temperatures inferiors als 50 ºC, s’aconsegueix una inactivació de les cèl·lules vegetatives microbianes sense alterar l’aroma, el sabor o el color dels aliments, tot i que hauríem de matisar aquesta afirmació i afegir que, depenent del tractament utilitzat i del producte inicial, poden aparèixer alguns canvis en les característiques organolèptiques.
De fet, les aplicacions de l’alta pressió van més enllà de la inactivació de microorganismes, depenent de les combi-
13 T ecno L o G ie S emer G en TS per A LA ind ÚST ri A AL imen TÀ ri A
nacions de pressió, temperatura i temps que s’utilitzin. Paral·lelament a l’objectiu de reduir la càrrega microbiana inicial, les matèries primeres també es poden tractar amb la finalitat de conservar-ne o millorar-ne la funcionalitat per a l’elaboració posterior de derivats. D’altra banda, l’efecte de l’alta pressió sobre les propietats físiques dels aliments pot conduir a l’obtenció de nous productes amb textures molt diferents de les que estem acostumats a percebre.
Durant els últims anys s’han fet molts estudis sobre la pressió i els seus efectes; paral·lelament, també es comercialitzen diversos productes tractats per alta pressió; però cal continuar amb la investigació per tal de trobar nous camps en què l’alta pressió sigui competitiva. A més, atès que les matèries primeres i els productes finals són molt variats, els efectes no són iguals en tots els aliments, i per aquesta raó és necessari assajar aplicacions concretes.
La cambra d’alta pressió i el seu tancament
Un equip industrial d’alta pressió consta bàsicament d’una cambra de pressió i el seu sistema de tancament, un sistema de generació de pressió, un sistema de control de la temperatura i un sistema de manipulació del producte, que pot estar més automatitzat o menys.
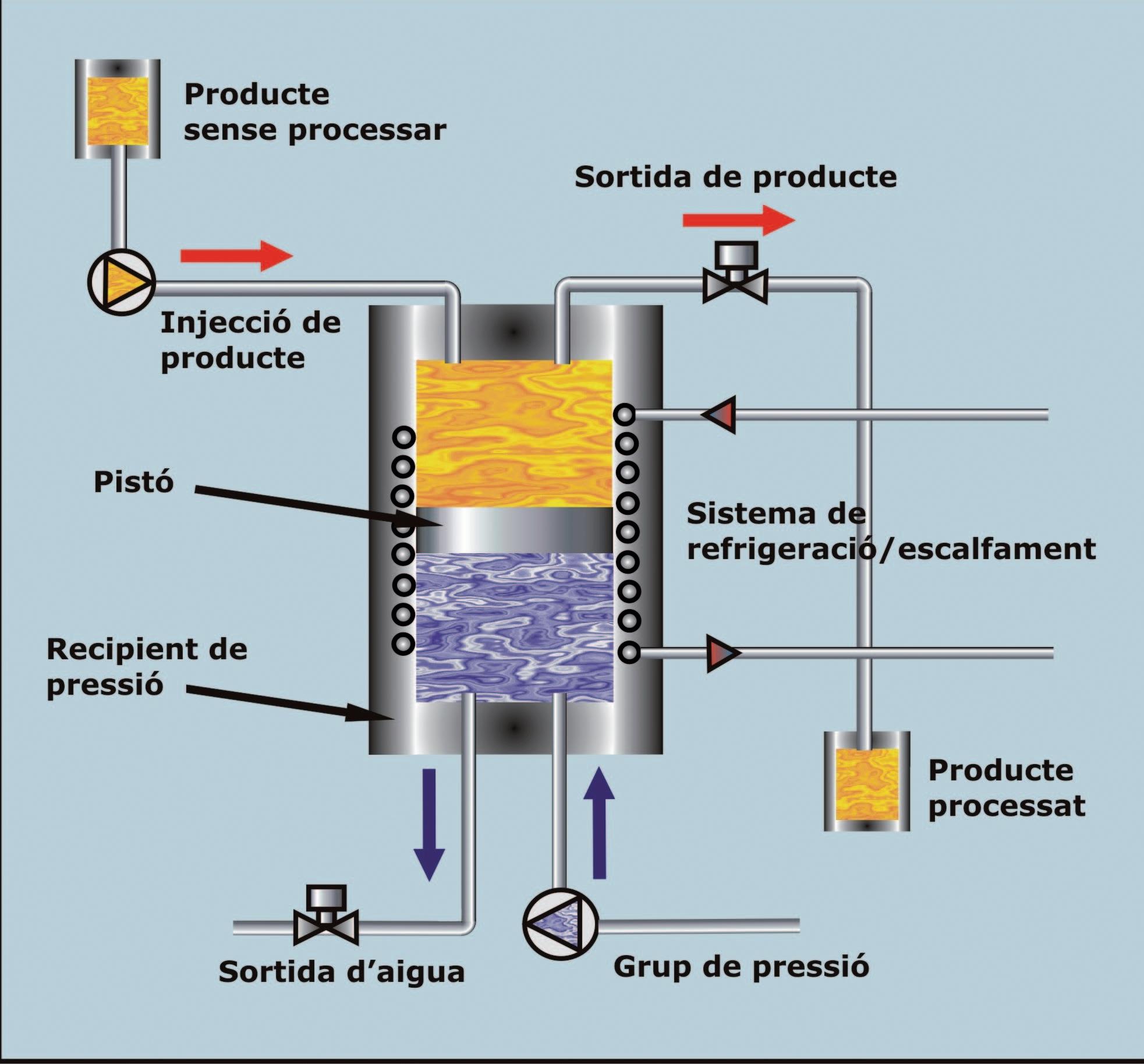
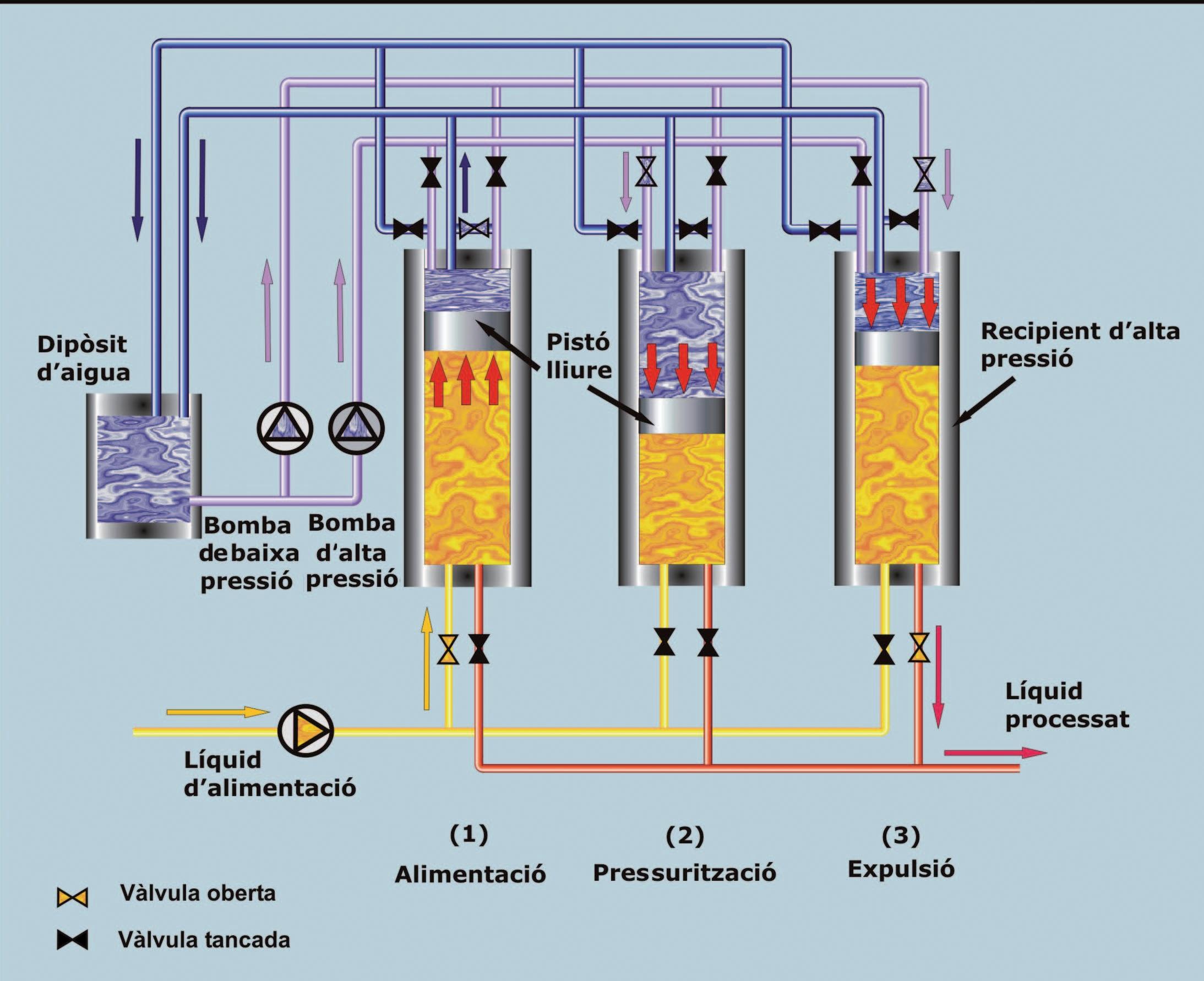
La cambra de pressió és el component més important d’un equip d’alta pressió. En molts casos, és un cilindre construït amb un aliatge d’acers (figura 1). L’ús d’aquestes cambres generalment està limitat a pressions de treball d’entre els 400 MPa i 600 MPa. En cas que es requereixin pressions superiors, s’utilitzen dissenys de cambres construïdes amb acers especials multicapa. En la figura 2 es mostra l’esquema d’un equip multicambra per al tractament de líquids.
Generació d’alta pressió
Quan la cambra és carregada amb l’aliment que es vol tractar, es tanca i s’omple amb el medi de transmissió de pressió. En la majoria d’aplicacions de pressió isostàtica, el medi transmissor de la pressió és simplement aigua potable amb un petit percentatge d’oli soluble per tal de lubricar les bombes i evitar la corrosió (figura 3).
Per aquest motiu, les parts internes de la cambra, els tubs, les vàlvules, l’intensificador de pressió en contacte amb l’aigua, els agents químics de neteja o l’aliment mateix han d’estar protegits de la corrosió, raó per la qual és necessari utilitzar l’acer inoxidable.
L’alta pressió es considera una tècnica amb molt de futur com a mètode per preservar els aliments i fins i tot modificar-ne la funcionalitat i millorar-ne les propietats reològiques i sensorials.
El més important d’aquest procés és que permet la inactivació de microorganismes i enzims amb una màxima
retenció de les vitamines i dels components responsables del sabor, el color i l’aroma, cosa que fa que l’aliment sigui de més qualitat. Aprofitant els avantatges que aquest procés ofereix, cal continuar la recerca per tal de determinar les millors condicions de processament per a cada tipus d’aliment.
També són necessàries més investigacions respecte dels canvis que es poden presentar durant la vida útil dels aliments tractats per alta pressió i dels seus efectes sobre els nutrients. Les investigacions de l’acció de l’alta pressió sobre els enzims també s’haurien d’ampliar, atès el comportament complex que presenten quan són sotmesos a aquest tractament.
La tecnologia d’equips existent ha de continuar millorant amb la finalitat de superar dificultats tècniques i abaratir costos. L’adopció de l’alta pressió per part de la
14 m ercè rA ven T ó S
Figura 1. Tractament d’alta pressió de productes líquids a granel.
Font: Edicions UPC.
Figura 2. Equip multicambra per al tractament de líquids.
la tecnologia avui
Font: Edicions UPC.
indústria alimentària es veurà molt afavorida quan es desenvolupin equips continus.
El problema principal que la tecnologia d’alta pressió planteja és l’alta inversió associada a la seva implantació a la indústria, cosa que repercuteix en un preu elevat dels productes al mercat en comparació amb els que són processats per mètodes tradicionals com el tractament tèrmic. És poc probable que els consumidors estiguin disposats a pagar un preu més elevat per aliments habituals que segueixen un mètode de producció diferent, llevat que la qualitat del producte sigui substancialment superior. Per aquest motiu, és possible que els esforços en la investigació es dirigeixin cap al desenvolupament de nous aliments, aprofitant la capacitat d’aquest procés per produir canvis en la textura dels aliments.
Polsos elèctrics d’alta intensitat de camp en la conservació d’aliments
Es tracta d’una tècnica desenvolupada per a la conservació dels aliments mitjançant un procés no tèrmic, de manera que s’obté un producte de gran qualitat semblant al producte fresc. Aquesta tècnica cada cop és més estudiada i perfeccionada, atesa la importància d’estabilitzar aliments sense variar-ne la qualitat original (s’ha de tenir en compte que els processos tèrmics són molt eficaços per a la conservació d’aliments i molt utilitzats a la indústria alimentària per a la inactivació enzimàtica i microbiològica, però solen tenir efectes negatius, com l’alteració de les propietats organolèptiques i la pèrdua de nutrients termolàbils dels aliments).
En aquesta tècnica s’aprofita la propietat que tenen els aliments fluids, que consten principalment d’aigua i nutrients, de ser molt bons conductors elèctrics per les altes concentracions de ions que contenen i per la capacitat de transportar càrregues elèctriques.
No va ser fins al 1967 que Sale i Hamilton van observar que la inactivació de la població bacteriana depenia principalment de dos factors: la intensitat dels polsos elèctrics i el temps de tractament (la durada del pols pel nombre de polsos). També la temperatura és un factor que cal tenir en
compte en el tractament, ja que a més temperatura, millor és l’efecte d’inactivació de microorganismes.
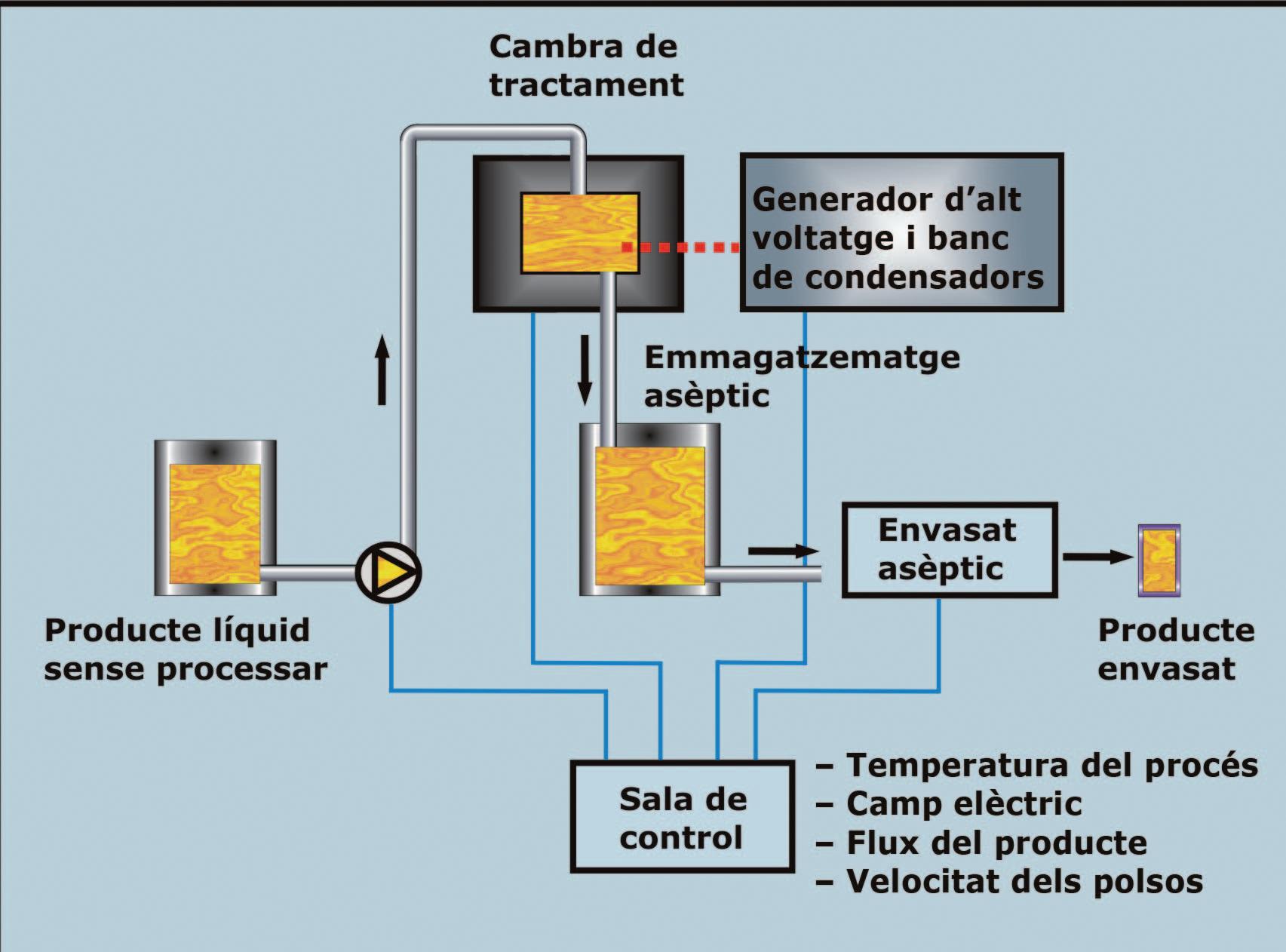
Un equip de processament d’aliments que utilitzi camps elèctrics d’alta intensitat té un cert nombre de components, com un generador de polsos d’alt voltatge (amb generador de corrent, condensador i interruptor); una cambra de tractament; un sistema de control de dades del procés; diverses sondes de temperatura, voltatge i corrent; un equip d’envasament asèptic, i un sistema de refredament de la cambra (figura 4).
El principi físic de la destrucció de microorganismes per l’aplicació de polsos elèctrics es basa en la deformació o destrucció de la paret cel·lular quan se li aplica una intensitat de camp elèctric, que dóna lloc a la permeabilització de la membrana per la formació de porus que poden ser irreversibles o reversibles, segons si s’excedeix o no un determinat llindar d’intensitat de camp elèctric.
Els efectes que provoca l’aplicació d’una descàrrega elèctrica d’alta intensitat de camp sobre un aliment (element conductor) col·locat entre dos elèctrodes són:
— Destrucció mecànica de la membrana cel·lular dels microorganismes quan s’aplica una descàrrega elèctrica de polsos curts de pocs microsegons i alt voltatge (20-80 kV/cm).
— Electròlisi de substàncies, depenent de la composició de l’aliment i el material de l’elèctrode.
— Calor produïda per l’efecte Joule. L’any 1992 es va demostrar que aquesta calor no era la responsable de la destrucció dels microorganismes, sinó que era la diferència de potencial entre tots dos costats de la membrana la que produïa la ruptura; tanmateix, la calor sí que afavoria el procés de destrucció.
La destrucció dels microorganismes per camps elèctrics depèn de la intensitat de camp elèctric aplicada, el temps de tractament (l’amplitud del pols pel nombre de polsos), la temperatura de tractament, la conductivitat, el pH i la força iònica de l’aliment i del tipus de microorganisme, la seva concentració i l’etapa de creixement.
La tecnologia per polsos elèctrics d’alta intensitat de camp (PEAIC) presenta, de moment, una sèrie de limitacions, com són:
15 T ecno L o G ie S emer G en TS per A LA ind ÚST ri A AL imen TÀ ri A
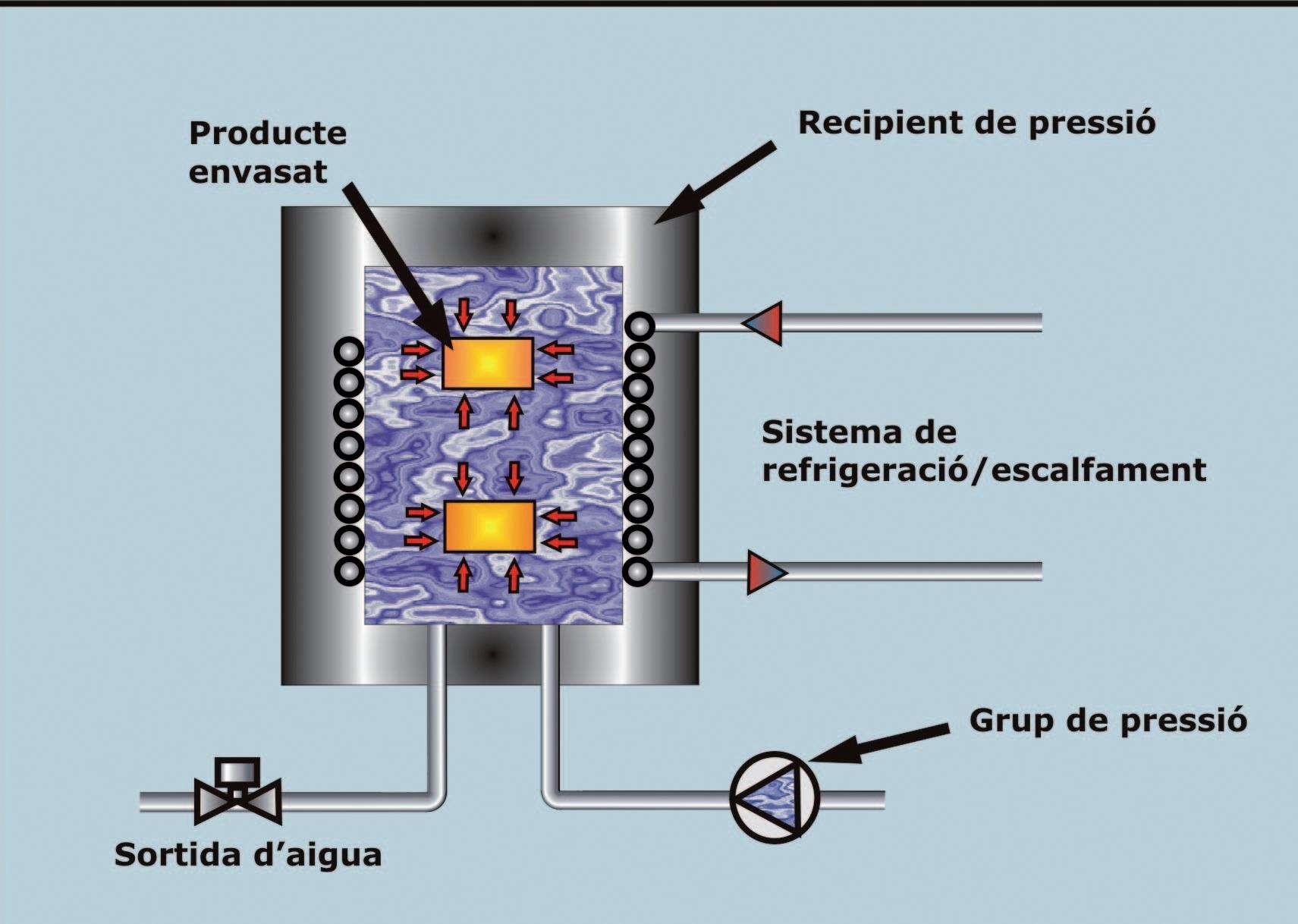
Figura 3. Tractament d’alta pressió per a aliments envasats. Font: Edicions UPC.
Figura 4. Esquema d’una planta de tractament. Font: Edicions UPC.
— La poca disponibilitat d’unitats comercials. Els dos primers equips disponibles són la unitat de Pure Pulse Technologies, Inc., i la de Thomson-CSF.
— La presència de bombolles d’aire a la cambra. Això provoca problemes operatius i de seguretat, ja que poden produir espurnes i malmetre el producte i la cambra. És necessari, per tant, crear el buit, i l’ús en productes sòlids que continguin bombolles d’aire queda limitat.
— L’aplicació limitada: els productes que tenen una conductivitat elevada no són aptes, ja que presenten una resistència massa baixa i necessitarien molta energia per aconseguir un camp elèctric específic.
— La grandària de les partícules de l’aliment. És per a aliments líquids i la grandària màxima de les partícules ha de ser menor que l’espai de la zona de tractament a la cambra, per tal de mantenir una operació correcta del procés.
— La falta de recursos per mesurar amb precisió la distribució del tractament. Això provoca que els resultats obtinguts no siguin del tot fiables, ja que encara és difícil saber amb precisió quin és l’efecte de les condicions particulars del procés.
— Resulta menys efectiva per als enzims i les espores.
extracció amb fluids supercrítics
La indústria agroalimentària està cercant la millor tècnica de separació per obtenir extractes naturals de gran puresa, que són utilitzats en una gran diversitat d’aplicacions; alhora, cal garantir que tant els productes extractats com els extractes en si no provoquin cap risc per a la salut pública i que siguin d’una qualitat excel·lent.
L’extracció amb fluids supercrítics (ESC) és una tècnica de separació de substàncies dissoltes o incloses dins una matriu. Es fonamenta en la capacitat que tenen determinats fluids en estat supercrític (FSC) de modificar el seu poder dissolvent.
L’ESC dóna resposta a la demanda d’obtenció de compostos sense risc per a la salut pública i d’una gran qualitat; ja està plenament implantada a escala comercial en l’obtenció del llúpol per a l’elaboració de la cervesa i l’obtenció d’aromes i sabors d’espècies i herbes aromàtiques i cafè sense cafeïna i te sense teïna. En aquests casos s’utilitza el diòxid de carboni (CO2) com a FSC. A més, diversos processos es troben en fase d’expansió, com ara l’obtenció de begudes sense alcohol, productes animals sense colesterol i olis de llavors.
El poder dissolvent dels FSC pot ser elevat, depenent de les condicions de pressió i temperatura aplicades que permetin la dissolució selectiva de substàncies determinades en l’FSC. Les substàncies seleccionades se separen fàcilment de l’FSC. L’extracció es realitza sense canvis de fase, simplement variant les condicions de pressió i/o temperatura dels FSC. En la figura 5 es mostra l’esquema
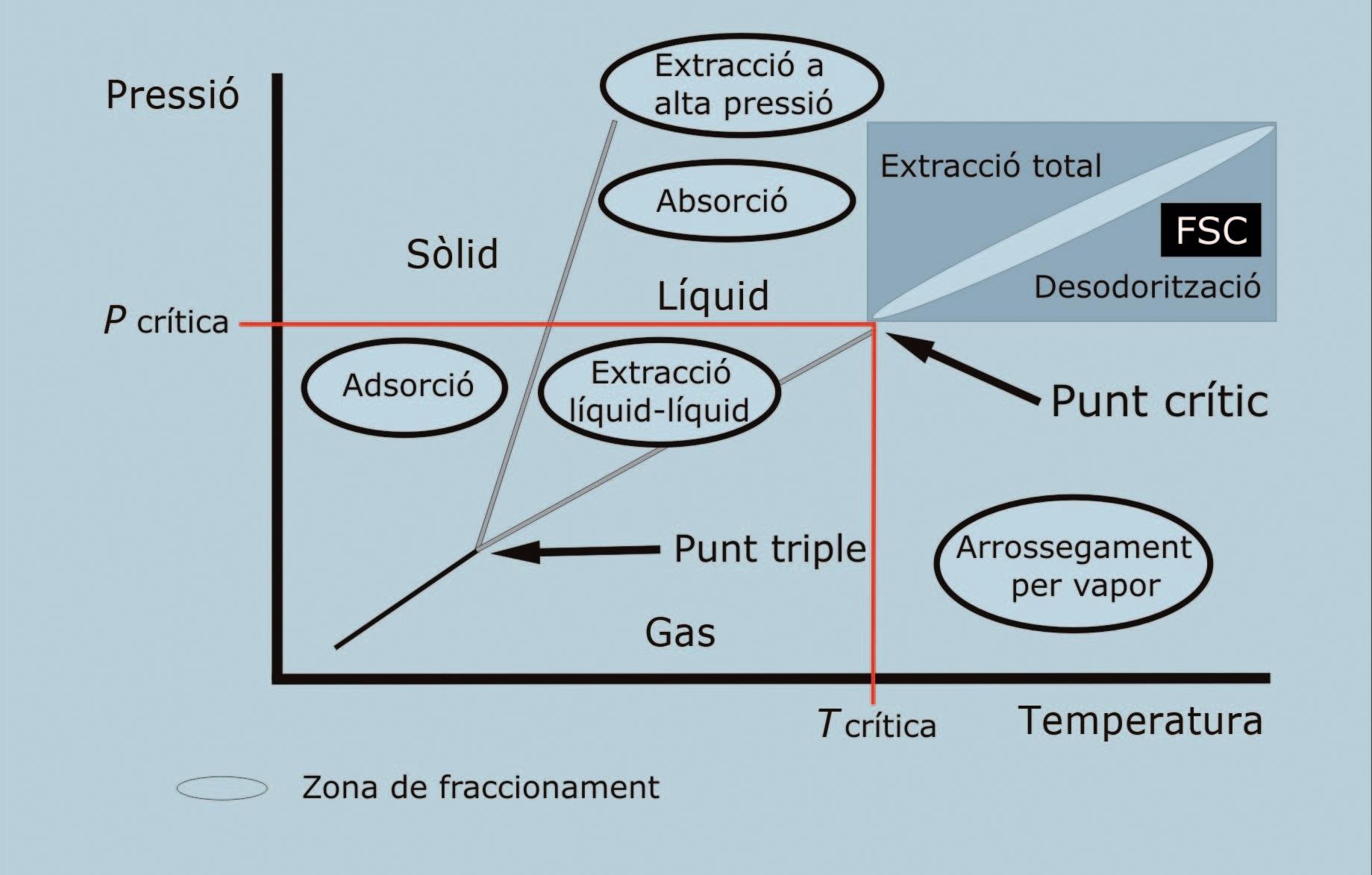
Figura 5. Esquema representatiu del diagrama de pressió-temperatura dels estats de la matèria. Font: Edicions UPC.
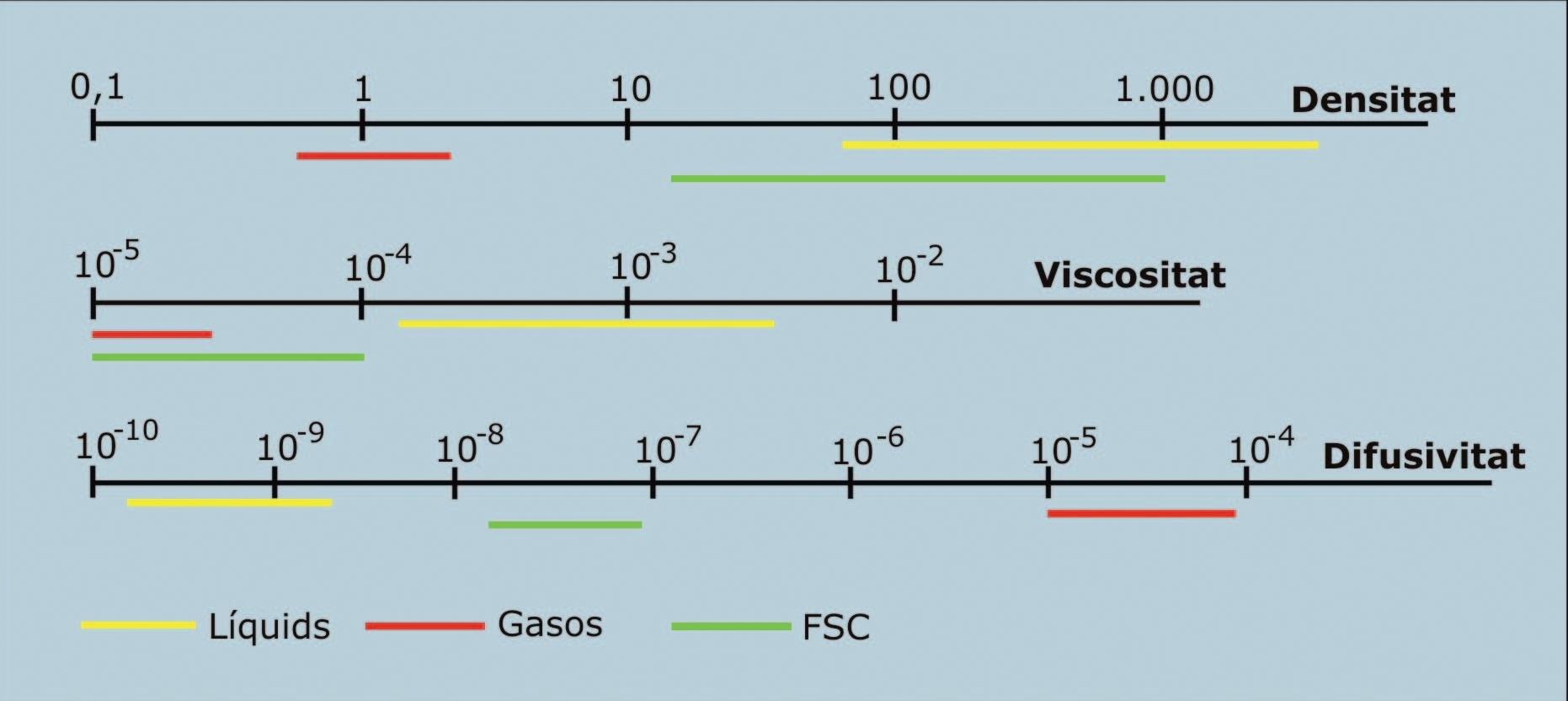
Figura 6. Propietats físiques dels diferents tipus de fluids. Font: Edicions UPC.
representatiu del diagrama de pressió-temperatura dels estats de la matèria, en què es pot veure que l’FSC sempre es troba per sobre de la seva temperatura i pressió crítiques. La figura 6 permet comparar les propietats físiques de líquids, gasos i FSC, com ara la densitat, la viscositat i la difusivitat.
Els compostos químics més utilitzats com a FSC són el propà i el CO2, perquè presenten propietats químiques més assequibles; el CO2 és el més utilitzat en la indústria alimentària.
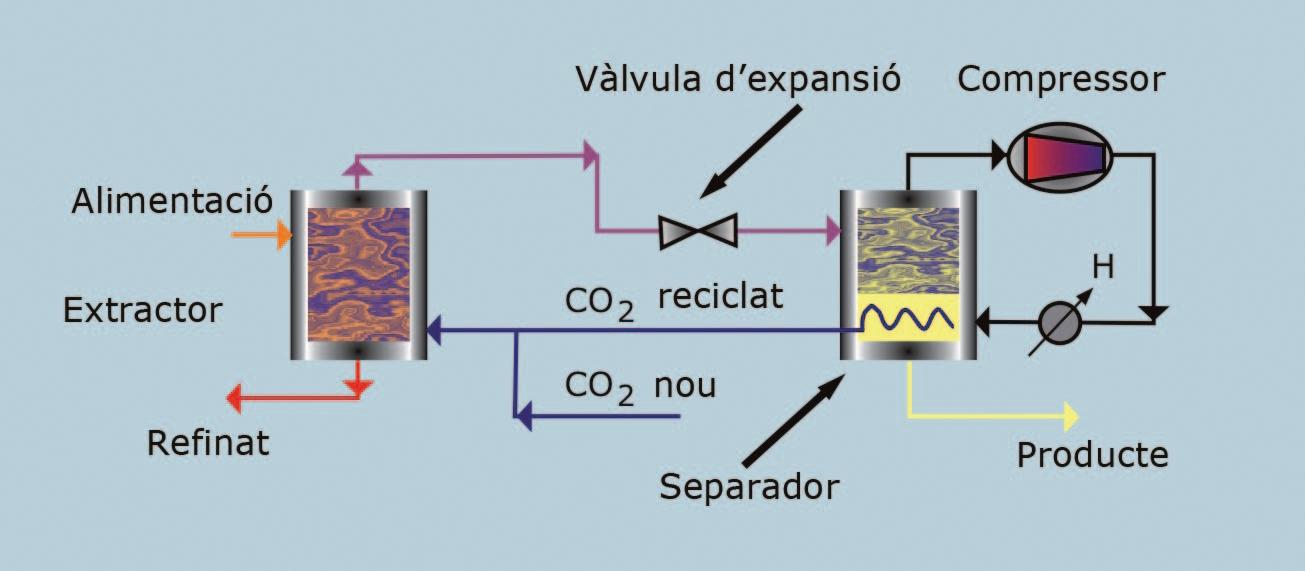
En la figura 7 es presenta un esquema simplificat d’un procés d’extracció sòlid-líquid de forma discontínua. L’extracció contínua o de flux es realitza en processos d’extracció líquid-fluid, en què la matèria primera que s’ha d’extraure està en la fase líquida, com el que es mostra en la figura 8. En aquest sistema s’eliminen els temps morts de càrrega i descàrrega, la pressurització i la despressurització i, per tant, el processament és més eficaç i ràpid.
El procés d’extracció es realitza bombant contínuament a contracorrent matèria primera i FSC, que queden en contacte el temps necessari per separar el component volgut. L’extracte queda solubilitzat per l’FSC, surten junts de l’extractor i s’expandeixen, i a través d’una vàlvula de descompressió es redueix el poder dissolvent de l’FSC, fet que origina la precipitació de l’extracte en el separador, d’on és retirat sense residus de dissolvent, ja que aquest s’evapora. L’FSC és recomprimit i s’envia de nou a l’extractor, de manera que és reciclat.
16 m ercè rA ven T ó S
la tecnologia avui
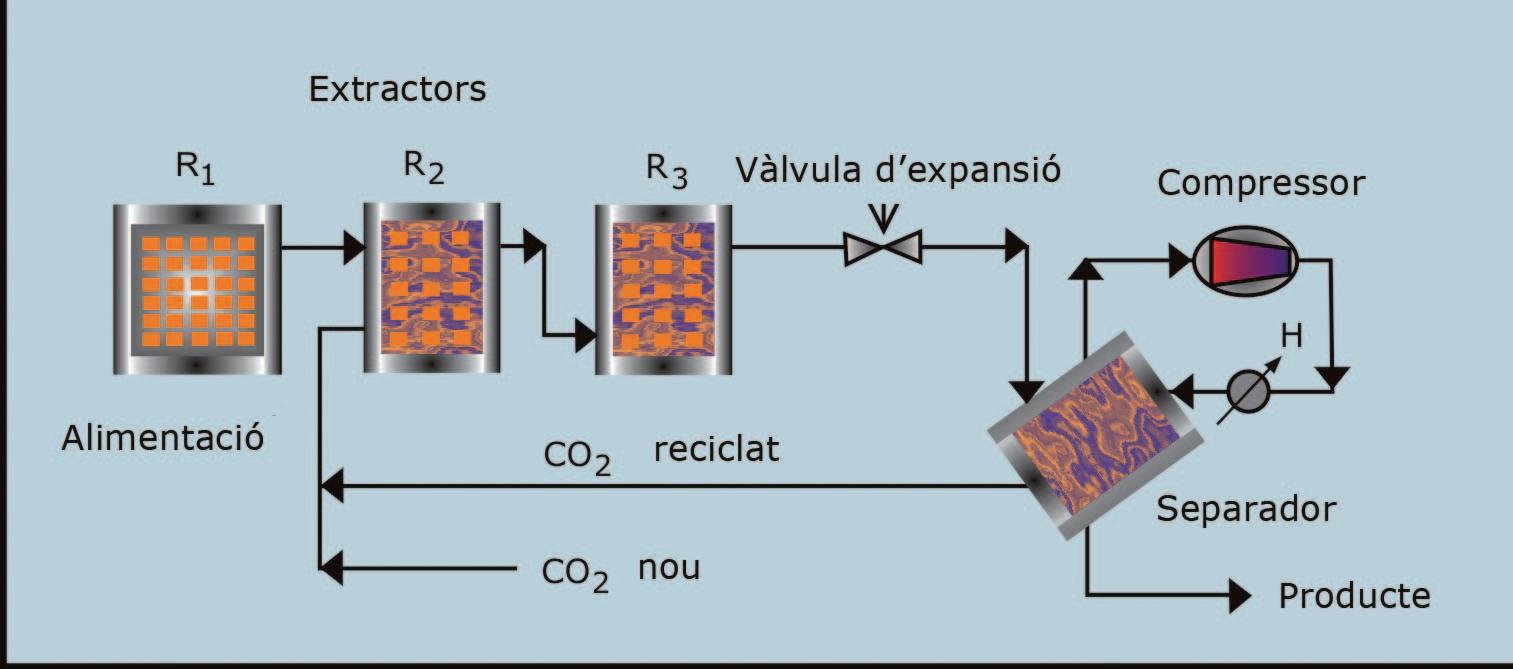
Figura 7. Procés simplificat de l’extracció supercrítica discontínua (sòlidfluid).
Font: Edicions UPC.
Font: Edicions UPC.
Aplicacions de l’extracció supercrítica a la indústria alimentària
— Extracció de colorants naturals.
— Extractes d’espècies (vainilla, pebre, nou moscada i molts d’altres).
— Extracció d’olis essencials.
— Extracció d’aromes i sabors.
— Eliminació de greixos animals (llet, rovell d’ou).
— Eliminació d’àcids grassos lliures.
— Desodoració i desacidificació d’olis i greixos.
— Fraccionament de l’oli de fetge de bacallà.
— Extracció de proteïnes sense greixos.
— Extracció d’èsters d’àcids grassos.
— Extracció del colesterol d’olis de peix i de carns vermelles.
— Fraccionament dels àcids grassos de la llet i de la mantega i aïllament del colesterol.
— Desgreixament d’aliments.
— Refinació d’olis naturals.
— Purificació de monoglicèrids.
— Separació de fosfàtids (lecitina i d’altres).
— Extracció d’olis i greixos vegetals (llavors de cotó, gira-sol, oliva, ametlla, coco, blat i blat de moro).
— Extracció de midó sense greixos.
— Obtenció de cacau desgreixat en pols.
Aplicacions de l’extracció supercrítica a les indústries de begudes
— Extracte de llúpol.
— Extracció d’aromes i sabors per a begudes suaus.
— Descafeïnament de cafè, desteïnament de te i recuperació de la cafeïna.
— Extracció de components aromàtics de sucs de fruita.
— Reducció del contingut alcohòlic.
— Inactivació de la pectinesterasa del suc de taronja.
— Desalcoholització de begudes alcohòliques.
L’ESC a la indústria alimentària i amb CO2 com a dissolvent està plenament establerta, sobretot en processos de descafeïnament de cafè i desteïnament de te, extracció de llúpol, extracció d’aromes i sabors d’espècies i herbes aromàtiques i separació del colesterol de la mantega, la carn i el rovell de l’ou. També està essent objecte de nombroses investigacions i desenvolupaments.
L’ESC és una tècnica de separació emergent, ja que és respectuosa amb el medi ambient i pot substituir progressivament molts dels processos d’extracció realitzats amb dissolvents orgànics.
L’ESC presenta un futur encoratjador en processos d’extracció i separació de principis actius de productes naturals, entre altres coses, perquè l’FSC es pot eliminar de manera ràpida i total (sols cal variar la pressió i la temperatura), però cal desenvolupar sistemes continus d’extracció amb més capacitat de treball perquè aquesta tècnica resulti competitiva. A continuació, se’n sintetitzen els principals avantatges:
— L’excel·lent qualitat i puresa dels productes que s’obtenen, que no es malmeten, per les temperatures moderades de treball i també per la neutralitat del dissolvent supercrític utilitzat, el CO2
— La rapidesa d’extracció i separació de les fases, amb l’esgotament total de la substància a extraure, per l’elevada difusivitat, la baixa viscositat i l’enorme poder dissolvent del CO2 supercrític. Per tant, es redueixen els costos de separació.
— L’extracte s’obté lliure de residus de dissolvent, perquè el CO2 s’evapora a pressió atmosfèrica; és una alternativa neta als dissolvents orgànics, amb els quals la separació de l’extracte, freqüentment, es realitza per destil·lació i per no malmetre’l, es moderen les temperatures necessàries i, per tant, queden restes de dissolvent, encara que sigui en quantitats inferiors a les legislades.
— La possibilitat de modificar la selectivitat i capacitat dels dissolvents, variant les condicions d’operació (pressió i temperatura), dóna un ampli marge d’ús de cada dissolvent, amb la possibilitat de fraccionar els diferents extractes durant l’extracció.
— L’econòmic cost de separació, ja que només es necessita reduir la pressió o la temperatura lleugerament per aconseguir la separació del CO2 i l’extracte.
— La tecnologia d’alta pressió per a l’ESC s’està desenvolupant actualment, i és cada cop més segura i econòmica. Encara que l’equipament és costós, la inversió es pot rendibilitzar amb l’excel·lent qualitat del producte obtingut.
— Existeixen altres aplicacions no extractives amb FSC que tenen un futur encoratjador a la indústria alimentària: l’esterilització, la cromatografia supercrítica, la nucleació homogènia de partícules, la inactivació o activació
17 T ecno L o G ie S emer G en TS per A LA ind ÚST ri A AL imen TÀ ri A
Figura 8. Procés simplificat de l’extracció supercrítica contínua (líquid-fluid).
Taula 2
Avantatges i inconvenients de la separació per membranes
Avantatges
• No és necessari escalfar l’aliment (no hi ha pèrdua de productes termolàbils).
• La concentració per membranes no exigeix un canvi de fase.
• Té menys costos de manteniment i mà d’obra que l’evaporació.
• Té poques exigències d’espai.
d’enzims i l’oxidació total d’aigües residuals i residus industrials de tot tipus.
Però l’expansió dels processos ESC està condicionada pels següents inconvenients:
— La seva ràpida expansió es troba limitada pel fet que aquesta tècnica de separació necessita l’experimentació en plantes pilot per dissenyar després el procés a escala industrial.
— La confidencialitat de les empreses respecte als seus avenços, juntament amb la proliferació de patents, representen un altre obstacle per a aquesta potencial expansió a gran escala.
— La inversió inicial en equipament és molt superior a la de l’extracció convencional amb dissolvents o la destillació, però s’amortitza a llarg termini.
— Encara només és rendible processar extractes d’elevat valor afegit.
tecnologia de membranes
L’aplicació de les tecnologies de membranes per a la conservació i l’obtenció d’aliments és clarament una tecnologia emergent en aquest sector. De fet, els processos de membrana s’utilitzen per concentrar un líquid o bé fraccionarlo en dos de diferent composició.
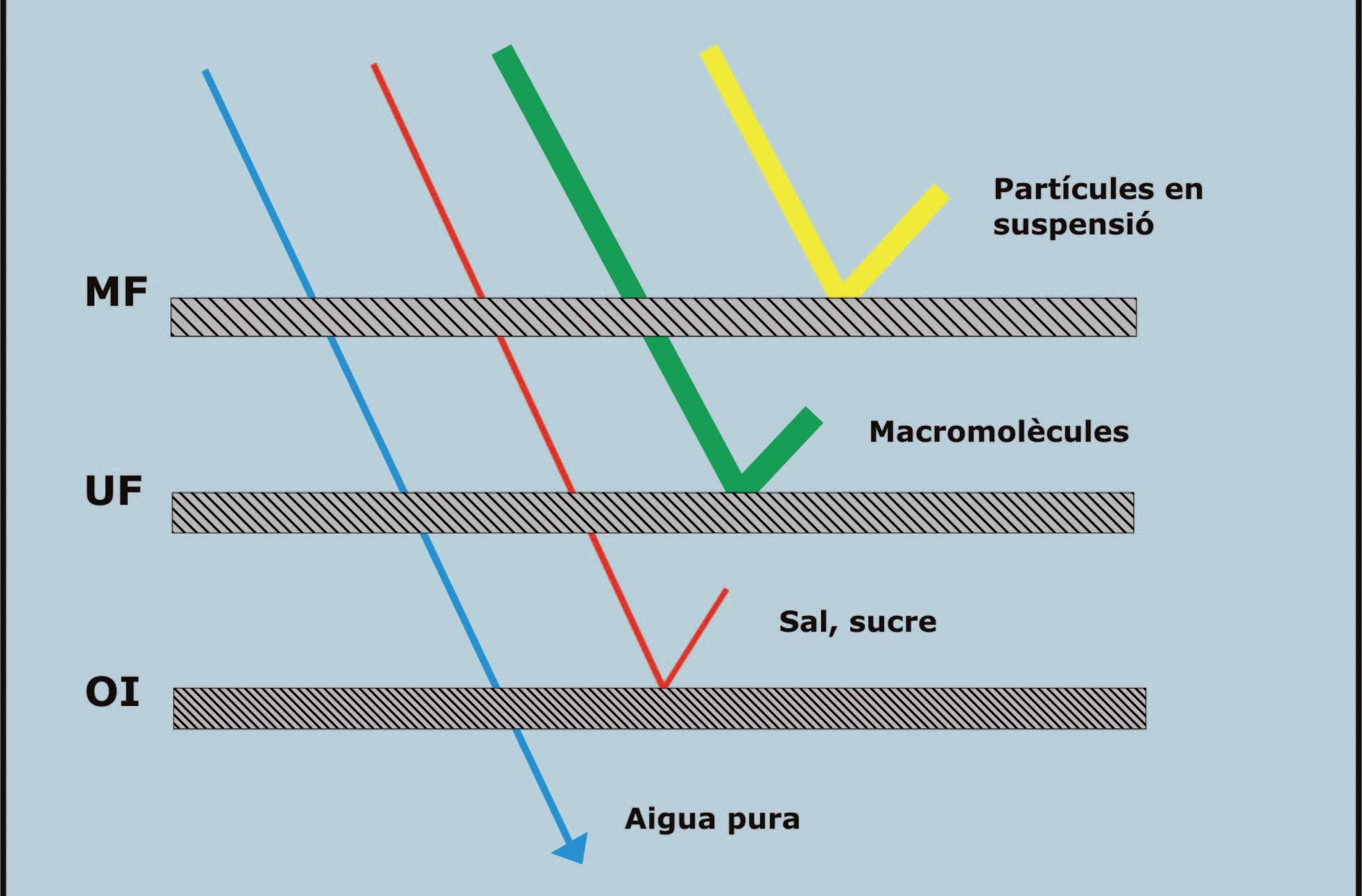
El procés de separació es fonamenta en la permeabilitat selectiva d’un component o més d’un del líquid a través de la membrana i en un gradient de pressió hidrostàtica. Els processos de membranes de filtració més importants per a la indústria alimentària són: la microfiltració (MF), la ultrafiltració (UF), la nanofiltració (NF) i l’osmosi inversa (OI). En la figura 9 es representen els principis de separació dels tres processos més importants.
Aquests processos són cada cop més emprats a la indústria alimentària, especialment la làctia i la de begudes en general. Ofereixen molts avantatges respecte d’altres tècniques de concentració més tradicionals. L’avantatge principal n’és que la qualitat del producte en general es manté, ja que es treballa a baixes temperatures i no hi ha interfície vapor-líquid que comporti pèrdues d’aromes. A més, les separacions per membrana presenten, en general, exigències energètiques reduïdes, perquè no hi ha canvi de fase, els costos de funcionament són baixos, es necessita
• Inversió inicial important.
Inconvenients
• Variacions de flux del producte que es vol filtrar.
• Obstrucció de la membrana, que redueix el temps de funcionament efectiu entre dues sessions de neteja consecutives.
• Concentració i desenvolupament de microorganismes, si el temps de permanència i la temperatura de treball són adequats a les seves condicions.
poc espai i hi ha una gran flexibilitat d’operació. Tot i així, les membranes tenen tendència a embrutar-se a mesura que el producte es concentra i la viscositat s’incrementa, la qual cosa limita les concentracions que s’hi poden assolir. Generalment, amb els processos de membrana només s’assoleixen concentracions d’entre el 40 % i el 45 %, en comparació amb el 80 % que es pot arribar a obtenir pel sistema tradicional de l’evaporació.
Els motius més importants expressats pels professionals del sector per a la utilització d’aquesta tecnologia per part de la indústria alimentària són:
— Millora de la qualitat dels productes (nutricional, bacteriològica i funcional).
— Reducció dels costos de producció, augment del rendiment, automatització dels processos i flexibilitat.
— Nous productes i solució als problemes mediambientals.
En la taula 2 es resumeixen els principals avantatges i inconvenients de la separació per membranes. Respecte als materials que s’utilitzen en els processos de membranes, poden ser molt diferents, ja que tant el material com les configuracions ofereixen moltes possibilitats. Per això, es poden establir diferents classificacions segons l’element de referència.
Un d’aquests pot ser la natura de la membrana: biològica o sintètica. Aquests dos tipus de membranes són molt diferents quant a estructura i funcionalitat.
A la natura existeixen mecanismes que compleixen la definició de membrana i són considerats barreres biològi-
18 m ercè rA ven T ó S
la tecnologia avui
Figura 9. Principis de separació per membranes. Font: Edicions UPC.
ques. Tenen una important funció reguladora cel·lular o d’intercanvi entre el medi intern dels éssers vius i el medi extern.
Fins ara s’ha estat capaç de crear sintèticament, amb polímers o compostos inorgànics, membranes sintètiques que poden ser utilitzades en un gran nombre de processos dins la indústria. Entre les membranes sintètiques, s'hi poden distingir les polimèriques i les inorgàniques.
Les membranes polimèriques o orgàniques estan fetes d’una gran varietat de polímers. Les membranes polimèriques hidròfobes solen ser de politetrafluoroetilè (PTFE, tefló), polivinil de fluor (PVDF), polipropilè (PP), polietilè (PE), polisulfona (PSF) o poliestersulfona (PES), mentre que les hidròfiles estan fetes d’èsters de cel·lulosa que són biodegradables, policarbonats (PC) o poliamides (PA). En general, les membranes hidròfobes presenten més problemes d’embrutiment irreversible que les hidròfiles; per aquest motiu, són més utilitzades les segones en processos industrials de separació. El desavantatge d’aquestes membranes és la baixa resistència a la temperatura i al pH.
Les membranes ceràmiques o inorgàniques estan fetes de materials com l’alúmina (Al2O3), l’òxid de zirconi (ZrO2) o l’òxid de sílice (SiO2). Són membranes rígides que permeten un flux de cinc a deu vegades més gran que les polimèriques. Resisteixen els productes químics i es poden netejar fàcilment sense malmetre’n la capa superficial. Toleren temperatures elevades i, per tant, es poden esterilitzar. Aquestes propietats les fan molt adequades per a aplicacions biotecnològiques. Un altre avantatge és la seva llarga vida, fins a deu anys, comparada amb la vida útil de les membranes polimèriques: d’un any per a les hidròfiles i de dos o tres anys per a les hidròfobes. El desavantatge de les membranes ceràmiques és el seu cost elevat.
Existeixen també les membranes semiceràmiques, que consisteixen en una matriu polimèrica banyada per una capa de material inorgànic.
En tot procés de membrana existeixen tres corrents:
— Aliment: dissolució que es vol tractar.
— Permeat: corrent que és capaç de passar a través de la membrana. Està constituït pel dissolvent i alguns soluts. És ric en substàncies amb tendència a travessar la membrana.
— Retingut o concentrat: corrent que no ha passat a través de la membrana. Ha perdut part de la dissolució aliment i, per tant, hi augmenta la concentració de substàncies que no poden travessar la membrana.
El corrent d’interès del procés pot ser el permeat, el retingut o ambdós, depenent de l’objectiu de la separació:
— Concentració: el component volgut es troba en una concentració baixa en el corrent de l’aliment, i és el dissolvent (permeat) el que s’elimina per tal d’augmentar el component que es vol concentrar.
— Purificació: les impureses o els components no volguts s’eliminen en el corrent del permeat o en el retingut.
— Fraccionament: quan una barreja se separa en dos components volguts o més.
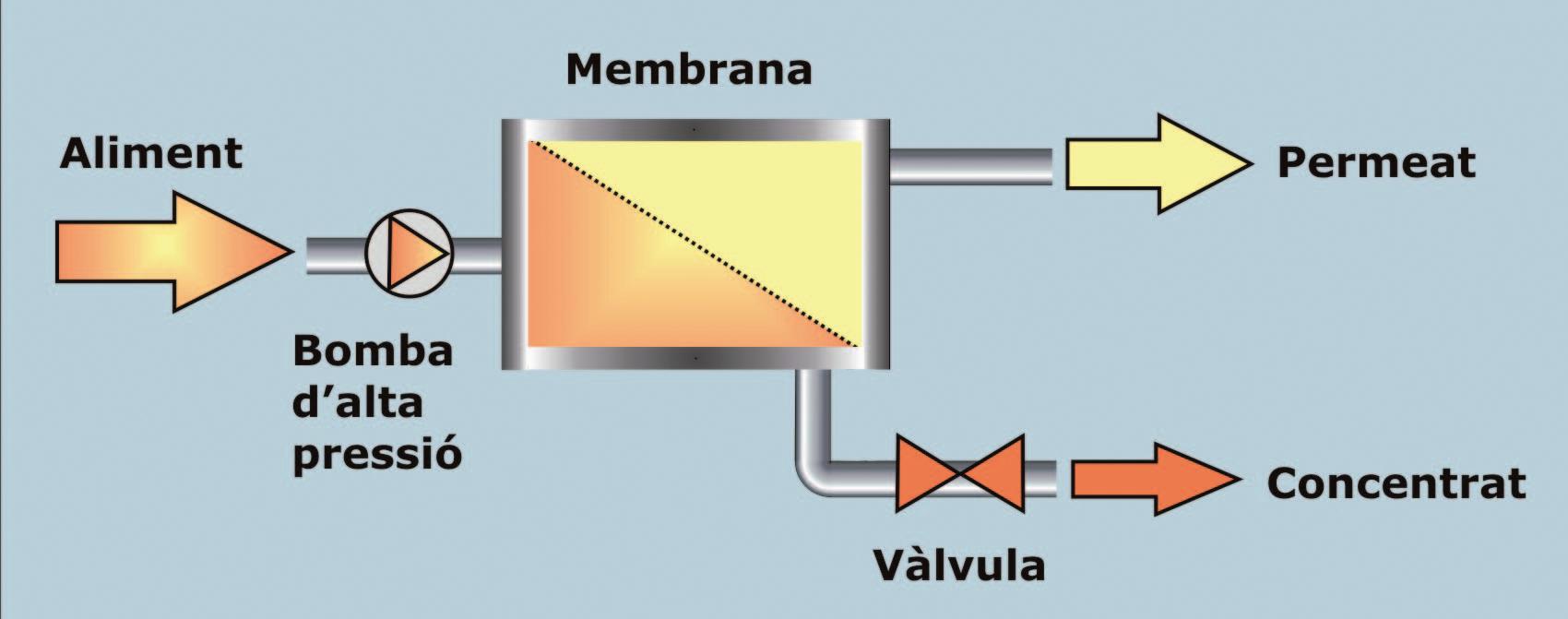
10. Representació esquemàtica d’un procés de separació per membrana.
Font: Edicions UPC.
Font: Edicions UPC.
En la figura 10 es representa l’aliment, el permeat i el concentrat. Si l’objectiu del procés és concentrar, el corrent d’interès és el retingut o concentrat. Si es vol purificar, el corrent d’interès és o bé el retingut, o bé el permeat, segons quin contingui les impureses que es volen eliminar. Si es vol fer un fraccionament, els dos corrents, el retingut i el permeat alhora, poden ser d’interès.
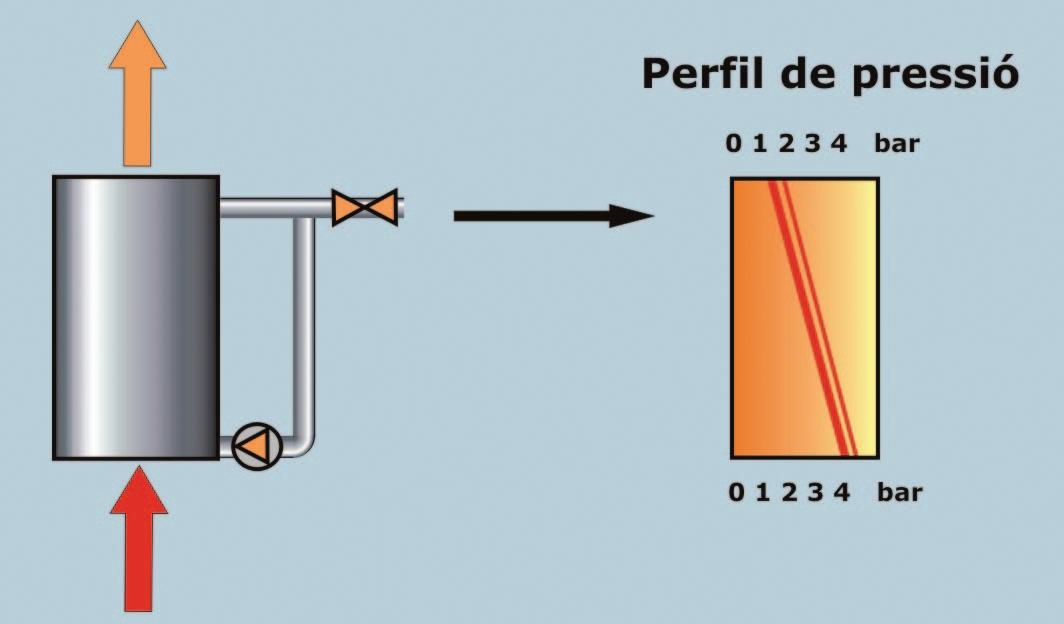
La separació es dóna gràcies a la facilitat que té la membrana de transportar un component d’una de les fases a través seu. El transport a través de la membrana s’efectua per l’acció d’una força impulsora. En la figura 10 es pot veure, doncs, el procés general de separació per membranes, en què es distingeixen els tres corrents. L’aliment és separat en un corrent més concentrat, o retingut, i en un corrent menys concentrat, o permeat. En la figura 11, a més, es veu la distribució de la pressió, que és màxima a l’entrada de l’aliment i mínima a la sortida.
La tecnologia de membranes ha estat objecte d’un gran interès els darrers anys, gràcies sobretot a la indústria química. Aquesta dedica una gran part del seu consum energètic a processos de separació i concentració de substàncies, la qual cosa crea, com a conseqüència, una gran demanda de tècniques avançades de separació que siguin netes, respectin el medi ambient i comportin un gran estalvi energètic.
El rang d’aplicació de les membranes a la indústria és molt ampli (com es pot veure en les taules 3 i 4) i el seu nivell de vendes és també alt; tanmateix, presenten encara una sèrie de problemes tècnics i econòmics, que són motiu d’estudi i de recerca amb vista a augmentar l’efectivitat d’aquesta tecnologia.
19 T ecno L o G ie S emer G en TS per A LA ind ÚST ri A AL imen TÀ ri A
Figura
Figura 11. Distribució de la pressió al llarg de la membrana. Pressió transmembrana.
L’aplicació de la tecnologia de membranes, com a procés, ha anat evolucionant a mesura que s’han desenvolupat millores en les propietats físiques i químiques de les membranes, en les aplicacions i en l’enginyeria del procés. Això fa que per a un bon nombre d’aplicacions alimentàries resultin millors tècnicament i econòmicament que altres tecnologies convencionals.
Les membranes més aplicades a la indústria alimentària són les de microfiltració i ultrafiltració, en bona part perquè poden treballar a altes temperatures tot garantint una desinfecció i una esterilització perfectes dels sistemes en què es manipulen els aliments, alhora que en mantenen les qualitats organolèptiques.
La indústria làctia és una de les indústries principals en què s’aplica la separació per membranes. S’utilitza l’osmosi inversa per concentrar la llet abans de l’evaporació i de la fabricació de formatge. El factor de concentració està limitat per la precipitació del fosfat de calci. En la concentració del xerigot obtingut en el processament de la llet, es pot utilitzar l’osmosi inversa per separar les proteïnes, la lactosa i les sals, i així reduir el cost de transport, mentre que la ultrafiltració es pot utilitzar per al fraccionament i per produir un concentrat de proteïnes de gran valor. La ultrafiltració s’utilitza també per a la concentració de proteïnes de la llet i per a la normalització proteica de la llet destinada a la producció de formatge, iogurt i altres productes lactis. La nanofiltració s’utilitza per a la dessalinització parcial del xerigot i la microfiltració s’aplica per a la reducció del nombre de bacteris a la llet desnatada i al xerigot, i també per reduir el contingut de greix del xerigot
Taula 3
destinat a la producció de concentrats proteics. En aquestes aplicacions, les petites molècules, com les sals o la lactosa, passen a través de la membrana d’ultrafiltració, mentre que les proteïnes queden retingudes en el concentrat. Els sucs de fruita es concentren des del contingut original de sucre del 10-16 % fins a un 60 % per al transport i l’emmagatzematge. Aquesta concentració es pot fer amb osmosi inversa, que redueix el consum energètic i millora la qualitat organolèptica del suc, i amb altres tècniques convencionals, com ara l’evaporació, la qual, però, té la limitació del baix rang de concentració a què arriba (un 24 %).
Per a l’obtenció de sucre de canya o de remolatxa, cal fer una clarificació del suc per eliminar-ne les partícules col·loïdals i en suspensió, cosa que es pot fer per ultrafiltració. També s’aplica osmosi inversa per a la preconcentració del xarop.
En la clarificació del vi existeixen diferents etapes de filtració, des de la de desbast fins a la d’esterilització, que poden ser substituïdes per una etapa de microfiltració. També es pot utilitzar l’osmosi inversa per concentrar el vi i accelerar-ne el procés de precipitació tartàrica, o per obtenir vi i cervesa amb un contingut baix d’alcohol. La microfiltració normalment s’utilitza per esterilitzar en fred la cervesa.
En els escorxadors, el residu principal que s’hi obté és la sang, que es pot recuperar, separar i purificar mitjançant membranes d’ultrafiltració. La gelatina, d’origen animal, rica en proteïnes col·loïdals i formada a partir de la hidròlisi del col·lagen, es pot fer per ultrafiltració, amb la qual s’obtenen millors resultats que amb l’evaporació i l’assecat tradicionals.
Aplicacions de processos de membrana a la indústria alimentària (I)
Procés
Aigua, llet i begudes
Tractament d’aigua per al consum humà
Tractament d’aigua d’ús industrial
Producció d’aigua de qualitat
Indústria làctia
Indústria làctia: elaboració de formatges
Indústries de fermentació
Begudes
Aplicació
Potabilització d’aigua per al consum humà (NF)
Desinfecció, clarificació i desmineralització de l’aigua (MF, UF, NF)
Dessalinització d’aigües marines (OI)
Clarificació, desinfecció i esterilització d’aigües residuals (MF, UF)
Aigua ultrapura per a la indústria electrònica (OI)
Aigua de refrigeració per a torres de refredament, condensadors i bescanviadors de calor (OI)
Aigua per a calderes i per al rentat de gasos (OI)
Concentració de la llet, per eliminació d’aigua, sals minerals i lactosa (UF, OI)
Producció de ferments lactis amb l’eliminació dels inhibidors del creixement cel·lular i concentració de la biomassa fins als nivells del producte comercial
Extracció i concentració de les proteïnes del xerigot adequades per a les indústries cosmètica i farmacèutica com a emulsionant (UF, OI)
Estandardització de la llet per donar-li el contingut proteic adequat (UF)
Clarificació i estabilització del most i el vi (UF)
Clarificació i esterilització de la cervesa (UF, MF)
Purificació de molècules actives i microorganismes en procés de fermentació (UF)
Concentració del vi per accelerar-ne la precipitació tartàrica (OI)
Eliminació de tartrats en el vi (MF)
Desalcoholització del vi i la cervesa (OI)
Clarificació i esterilització dels sucs de fruita després de la premsada, per suprimir les etapes convencionals següents de filtració (UF, NF)
Preconcentració dels sucs (OI)
Recuperació dels colorants i les aromes de les aigües residuals
Ajust de l’acidesa dels sucs
20 m ercè rA ven T ó S
la tecnologia avui
Procés/indústria
Altres indústries alimentàries
Processament de carn i peix
Processament de fruites i hortalisses
Processament dels ous
Processament del sucre
Processament d’olis i greixos
Taula 4
Aplicacions de processos de membrana a la indústria alimentària (II)
Separació/aplicació
Tractament dels purins. Separació de la biomassa (UF)
Tractament de la sang. Preconcentració del sèrum sanguini (UF, OI)
Concentració de proteïnes en la fabricació de gelatines
Concentració-recuperació de proteïnes de la salmorra residual del curat de carns i peixos
Concentració-recuperació de proteïnes de les aigües de rentat de carns i peixos
Eliminació de pèls i pell d’animals en l’aigua residual dels confitats
Bioreactors amb membrana per a la conversió de residus de patata
Recuperació de proteïnes vegetals
Recuperació de productes del processament
Recuperació de productes i subproductes d’aigües de rentat (sucres, olis essencials, proteïnes)
Concentració d’albúmina d’ou fins a valors del 40 % d’extracte sec
Deshidratació parcial abans de l’assecat (UF)
Desmineralització de melasses
Recuperació de sucre de les aigües de rentat abans de l’etapa d’evaporació-concentració
Preconcentració de xarop (OI)
Clarificació dels primers extractes de remolatxa (UF)
Concentració de dissolucions diluïdes de remolatxa
Preparació de proteïnes vegetals
Recuperació d’olis d’aigua de rentat
Recuperació de dissolvents
Refinació d’olis comestibles (ajust de l’acidesa, descoloració)
Aquests exemples d’aplicació de les membranes en processos de separació evidencien que aquesta tecnologia presenta molts avantatges i que la seva utilització continuarà augmentant amb el desenvolupament de nous materials i tecnologies. Cal destacar que la qualitat del producte obtingut amb aquesta tècnica, gràcies al fet que no es produeixen canvis de fase i que es treballa a temperatures reduïdes (< 50 ºC), generalment és superior a la qualitat aconseguida per mitjà d’altres tecnologies com l’evaporació. ■
Bibliografia
Fellows, P. J. Food processing technology. CRC, 2009. 913 p. ISBN 978-1-4398-0821-4.
Raventós, M. Indústria alimentària, tecnologies emergents. Edicions UPC, 2003. 206 p. (Politext, Agroalimentària; 140) ISBN 84-8301-561-7.
— Industria alimentaria, tecnologías emergentes. Edicions UPC, 2005. 210 p. (Politext, Agroalimentària; 164) ISBN 848301-790-3.
21 T ecno L o G ie S emer G en TS per A LA ind ÚST ri A AL imen TÀ ri A
tecnologia avui
RECERCA EN INCENDIS f ORESTALS: CREMES EX p ERIMENTALS
e ulàlia Planas, e lsa Pastor i Yolanda Pérez
A AUSTRÀLIA
Centre d’Estudis del Risc Tecnològic. Departament d’Enginyeria Química. Universitat Politècnica de Catalunya
Introducció
Abast de la problemàtica a escala mundial
Els incendis forestals representen actualment una problemàtica d’abast mundial. Les estadístiques pel que fa al nombre d’ignicions i la superfície cremada així ho indiquen (figura 1) i, a més, estudis recents apunten que amb l’evolució actual del clima aquesta problemàtica tendirà molt probablement a agreujar-se (Flannigan et al., 2009).
El canvi més important en el nombre global d’hectàrees cremades durant les darreres dècades s’ha degut bàsicament al gran increment que han experimentat els incendis en els boscos tropicals. La dimensió i el nombre d’incendis als tròpics estan creixent a causa de la desforestació i del desenvolupament agrícola de Sudamèrica i el Sud-est asiàtic. Nogensmenys, l’àrea cremada està augmentant també als boscos boreals circumpolars i als de l’est dels Estats Units (EUA) així com a tota la zona del sud d’Europa. Les causes són diverses: en el cas dels EUA, s’atribueix a l’augment de la càrrega de combustible originat per les passades polítiques de supressió d’incendis; en el cas de Rússia, a la disminució dels recursos destinats a l’extinció, i pel que fa al sud d’Europa, als canvis en la política agrícola de la Unió Europea, que han originat un èxode de la població rural amb el consegüent augment dels boscos i matollars a les zones abandonades. Pel que fa a Austràlia, continua

2. A l’esquerra, incendi ocorregut a Maxieira (Santarém, Portugal) l’1 d’agost del 2003 (Font: P. Palheiro). A la dreta, incendi que s’aproxima a Hobart, la capital de l’illa de Tasmània (Austràlia), el 13 de desembre del 2006 (Font: I. Stewart).
essent el continent dels incendis per excel·lència, encara que el foc en els boscos temperats i les sabanes s’ha mantingut aproximadament constant en les darreres dècades.
La qüestió és que arreu del planeta avui dia es donen incendis amb un gran potencial destructiu, als quals ni els mateixos tallafocs naturals poden fer front, en què es veuen amenaçats paratges naturals d’un valor incalculable i en què els assentaments humans també es poden veure en perill greu (figura 2).
Els incendis forestals a Austràlia
L’ús del foc —tant per part de la comunitat aborigen com pels colonitzadors europeus— ha estat determinant en la configuració del paisatge i la biodiversitat d’Austràlia. Com a exemple, cal esmentar que els aborígens utilitzaven el foc com a mètode per caçar (figura 3), mentre que els colonitzadors l’utilitzaven per crear àrees de conreu.
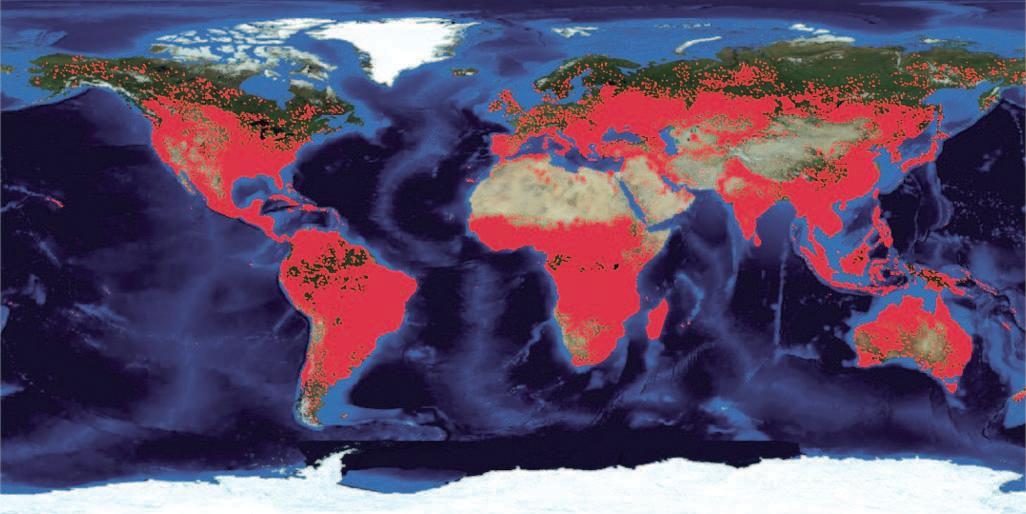
1. Deteccions d’incendis durant l’any 2007 a través del sistema MODIS (<http://rapidfire.sci.gsfc.nasa.gov/>). Cada punt vermell representa la localització d’un incendi però no l’àrea cremada. Font: Flannigan et al., 2009.
Austràlia és un país molt propens a patir incendis, amb una interfície urbana i una biodiversitat, tant de flora com de fauna, molt amenaçades. Els incendis es produeixen tant als boscos tropicals com als deserts i el règim d’incendis i els seus efectes presenten una gran variabilitat. En algunes àrees de la sabana i a la zona tropical del nord, la freqüència d’ocurrència mitjana és d’un a dos anys, mentre que a les selves temperades del sud-est, és de prop de tres-cents anys o més (Gill i Moore, 2002). En algunes zones del continent, els incendis es produeixen durant tot l’any i poden
22 R evista de T ecnologia , núm. 4 (2011), p. 22-28 • ISSN (ed. impresa): 1698-2045 • ISSN (ed. electrònica): 2013-9861 • DOI: 10.2436/20.2004.01.9 • http://revistes.iec.cat/index.php/ RTEC
la
Figura
Figura

assolir intensitats màximes d’aproximadament 100 MW · m-1 (Gill i Moore, 1990). A tall d’exemple, es pot recordar els esdeveniments ocorreguts a l’estat de Victòria en l’anomenat Black Saturday, en referència al dissabte 7 de febrer del 2009; és el pitjor episodi d’incendis viscut a Austràlia des que se’n té registre, pel que fa a la pèrdua de vides humanes. El dia 7 de febrer del 2009, van cremar quatre-cents incendis simultàniament, que causaren cent setanta-tres morts, més de quatre-cents ferits i la destrucció de 3.500 edificis; en total, es van acabar cremant 450.000 ha.
Context: origen del CRC
És fàcil preguntar-se, doncs, com és que en aquest entorn, amb tants incendis, encara cremen més territori expressament, amb finalitats de recerca. Per entendre això, s’ha de conèixer una mica el context en el qual es va originar aquesta recerca i també veure-ho des de l’entorn d’un país immens i no d’un país petit com el nostre (Austràlia té una superfície aproximadament dues-centes cinquanta vegades superior a la de Catalunya).
Durant els tres anys compresos entre el 2000 i el 2002, Austràlia va patir nombrosos incendis arreu del seu territori després d’un període anterior humit, que havia fet

4. Incendis al sud-est d’Austràlia el 22 de gener del 2003. Font: NASA GSFC, MODIS Rapid Response Team (<http://www.nasa.gov/ centers/goddard/news/topstory/2003/0113austrfires.html>).
créixer molt la vegetació. El 8 de gener del 2003, es van iniciar al Parc Nacional de Brindabella i Namadgi, a l’oest de Canberra, al voltant de cent seixanta incendis a causa dels llamps (figura 4). Aquests incendis van anar creixent i el 18 de gener van arribar a la capital, Canberra, on van destruir més de cinc-centes cases i van provocar la mort de quatre persones. El 70 % de l’estat del Territori de la Capital Australiana va quedar greument afectat.
Aquest fet va ser el detonant per tal que totes les administracions, els polítics i els agents implicats en la lluita contra els incendis forestals es posessin d’acord i constituïssin el Bushfire Cooperative Research Centre (CRC) el juliol del 2003, amb un pressupost per als primers set anys de 100 milions de dòlars australians (aproximadament, 63 milions d’euros).
El Bushfire CRC unia investigadors de les universitats, del Commonwealth Scientific and Industrial Research Organisation (CSIRO) i altres organitzacions governamentals (com cossos de bombers, Departament de Medi Ambient, etc.) així com centres de recerca de Nova Zelanda i també la indústria privada. Aquest tipus d’estructura (de CRC ja n’existien en altres camps) afavoria els lligams entre els investigadors i els usuaris finals creant entorns multidisciplinaris i multiinstitucionals orientats a trobar solucions als problemes reals.
El Bushfire CRC es va posar en marxa amb cinc programes per desenvolupar durant aquests set anys:
a) Prevenció i extinció («Safe prevention, preparation and supression»).
b) Gestió del foc en el territori («Management of fire in the landscape»).
c) Autoprotecció de les comunitats davant el foc («Community self-sufficiency for fire safety»).
d) Protecció de la població i els béns («Protection of people and property»).
e) Formació («Education and training»).
Del programa A, que és el que ens interessa, se’n va fer responsable el Bushfire Research Group del CSIRO.
Tot i que el Bushfire CRC es va iniciar l’any 2003, el Bushfire Research Group del CSIRO es va iniciar a final dels anys cinquanta de la mà d’Alan McArthur (que fou qui va desenvolupar el popular nomograma Fire Danger Meter, encara utilitzat avui dia pels bombers australians per predir el risc d’incendi). El 1975, Phil Cheney va agafar el relleu del lideratge, i el 2000, ho va fer Jim Gould. Aquest equip multidisciplinari ha dut a terme nombrosos experiments a gran escala a Austràlia, com, per exemple, els que es van dur a terme dins el projecte anomenat Aquarius, que estudiava l’eficàcia de l’extinció aèria amb aigua i la resposta fisiològica dels bombers davant els incendis, i dins el projecte Vesta, en el qual s’investigava el comportament d’incendis d’alta intensitat en boscos d’eucaliptus durant períodes de sequera. Actualment, el projecte que s’hi ha estat duent a terme és el projecte FuSE («Fire experiments in scrub, with attention to wind “u”»), en el qual s’emmarquen els experiments que es detallen més endavant.
23 recerc A en incendi S fore STALS: creme S e X perimen TALS A A u ST r ÀL i A
Figura 3. Pintura que mostra com el foc era utilitzat com a mètode per caçar a Austràlia per part de la comunitat aborigen.
Figura
el projecte FuSe
L’objectiu que es va fixar per a aquest projecte fou estudiar el comportament del foc en dos tipus de vegetació (mallee i heath) en dues àrees molt propenses als incendis: l’Ngarkat Conservation Park, a l’estat d’Austràlia Meridional, i el Torlesse Range, a la regió de Canterbury a l’Illa del Sud de Nova Zelanda.
Aquest era l’objectiu general del projecte; hi havia, però, uns objectius més específics:
Recollir dades sobre el comportament del foc als matollars.
Incrementar el coneixement sobre la contribució dels diferents estrats de combustible a la propagació del foc.
Estudiar l’efecte del vent en la propagació.
Estudiar l’efecte del tipus d’ignició sobre el creixement i la forma de l’incendi.
Estudiar l’efecte «crema / no crema» (go / no go) en funció de les condicions ambientals i la discontinuïtat del combustible.
Analitzar l’aplicabilitat de les tècniques de reconeixement visual d’estimacions de càrrega de combustible a les estructures de matollar.
Modelitzar la humitat del combustible a les estructures de matollar.
Avaluar l’efectivitat de l’extinció aèria.
Estudiar les condicions de seguretat i salut dels bombers (fatiga, exposició al fum, etc.).
El que s’esperava obtenir d’aquest projecte eren, bàsicament, dues coses:
Una guia sobre el comportament del foc i les cremes prescrites a les estructures de matollar dels tipus mallee i heath
Una eina de suport a la decisió que combinés la meteorologia amb el combustible i les prediccions sobre el comportament del foc per tal d’ajudar a la presa de decisions durant l’extinció i les cremes prescrites.
L’Ngarkat Conservation Park
L’Ngarkat Conservation Park és l’àrea de vegetació verge més gran de l’estat d’Austràlia Meridional (figura 5); té unes 270.000 ha, però comptant amb altres parcs que l’envolten forma una àrea protegida de gairebé 900.000 ha (aproximadament 55 km d’ample per 160 km de llarg, correspondria aproximadament al 30 % de la superfície de Catalunya). El terreny hi és pràcticament pla (tot i que té algunes dunes) i es troba a una altura sobre el nivell del mar d’uns 150 m.
El parc de Ngarkat és una zona molt propensa a patir incendis. El seu règim d’incendis és molt complex, tal com
es pot apreciar en la figura 6, en què es poden veure les àrees cremades pels incendis des del 1945 fins al 2005. Com a exemple, el 1999 van patir un incendi que va cremar unes 80.000 ha i poc temps després, el 2002, un altre que en va cremar 33.000. A títol comparatiu, es pot dir que l’incendi del Berguedà-Solsonès del 1994 va cremar aproximadament 40.000 ha i que aquell any (quan més hectàrees s’han cremat) en total no es va arribar a 80.000 ha cremades a Catalunya. Això té moltes implicacions pel que fa a la conservació de les espècies que hi viuen, ja que aquest parc té un valor ecològic importantíssim i actualment té moltes espècies de flora i fauna en perill d’extinció per l’alta recurrència del foc.
els experiments a Austràlia el març del 2008
Dins del projecte FuSE, es volia avaluar el comportament del foc durant totes les èpoques de l’any per tal de poder fer una guia de cremes controlades per conèixer les condicions per cremar amb diferents intensitats. Així doncs, s’analitzà el Fire Danger Index (McArthur, 1967) a la zona
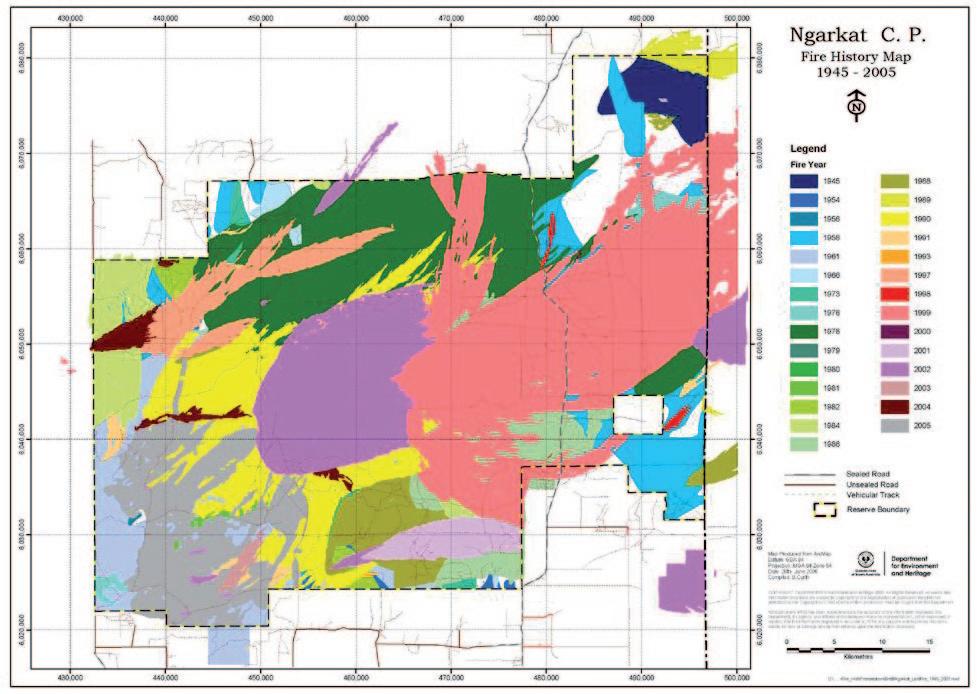
24 e u LÀL i A pLA n AS , eLSA pAST or i Yo LA nd A p érez
la tecnologia avui
Figura 5. Localització de l’Ngarkat Conservation Park, a l’estat d’Austràlia Meridional.
Figura 6. Règim d’incendis a l’Ngarkat Conservation Park entre el 1945 i el 2005.
entre el 1965 i el 2004 i s’establiren tres fases d’experimentació que coincidissin amb un període de risc d’incendi baix (fase i, tardor-hivern del 2006), un període de risc mitjà (fase ii, final d’estiu - inici de tardor del 2007) i un període de risc elevat (fase iii, estiu del 2008). Els experiments que s’expliquen corresponen a aquesta tercera fase i es dugueren a terme en condicions extremes pel que fa al risc d’incendi.
La zona experimental tenia un total de 550 ha, distribuïdes en trenta parcel·les de 250 m per 250 m més tres parcelles molt més grans d’uns 800 m per 900 m aproximadament (figura 7) on es dugueren a terme les proves per a l’estudi de l’efectivitat de productes químics per a l’extinció d’incendis.
En aquesta àrea hi ha bàsicament dos tipus de vegetació: un bosc d’eucaliptus constituït bàsicament per una espècie que allà anomenen mallee i un matollar anomenat heath (figura 8). El mallee és un bosc molt obert, amb un sotabosc poc dens i poca quantitat de combustible fi, que presenta una distribució horitzontal molt discontínua. D’aquest tipus de vegetació, n’hi havia de tres edats diferents pel que fa al darrer episodi de foc: set, vint i quarantavuit anys. Pel que fa a la formació de matollar, el heath, correspon bàsicament a una estructura arbustiva, de densitat moderada i poca altura, sobretot en el més jove, que tenia set anys. També hi havia parcel·les de vint anys, una mica més altes i denses. També en aquest cas hi havia relativament poca quantitat de combustible fi i moltes discontinuïtats.
Les tasques d’investigació que es varen dur a terme comprenien dues fases ben diferenciades: la fase de mostreig i estudi de les parcel·les abans de les cremes i la fase d’instrumentació i seguiment de l’experiment, que es duia a terme unes hores abans i durant l’experiment.
La fase prèvia comprenia les tasques de reconeixement de combustible mitjançant tècniques de mostreig, l’estudi del camp de vents i la preparació de la parcel·la per a la collocació de la instrumentació. La fase d’execució de la crema comprenia l’estudi de la velocitat de propagació, l’estudi de la calor emesa per l’incendi, les observacions in situ, l’estudi de l’efecte dels retardants i, finalment, el seguiment amb vídeo visible i infraroig.
Les tècniques de mostreig de combustible utilitzades es van aplicar al llarg de transsectes longitudinals. Cada 20 m es realitzava una estimació qualitativa de l’índex de risc d’incendi. Aquesta és una tècnica d’observació radial, és a dir, s’estimen certes propietats característiques del combustible en una circumferència d’aproximadament 5 m de radi. Els paràmetres que s’analitzen són: altura de l’estrat, percentatge de coberta i risc associat a cada estrat de combustible segons la seva càrrega i la proporció de viu i mort. A més, cada 50 m es realitzava un mostreig destructiu consistent a buidar completament una àrea de 2 m per 1 m i separar la vegetació per estrats i per estat (viu o mort), amb la finalitat d’obtenir-ne la càrrega, l’altura i la humitat. Una altra tècnica interessant aplicada fou el reconeixement de les discontinuïtats de combustible en el territori.
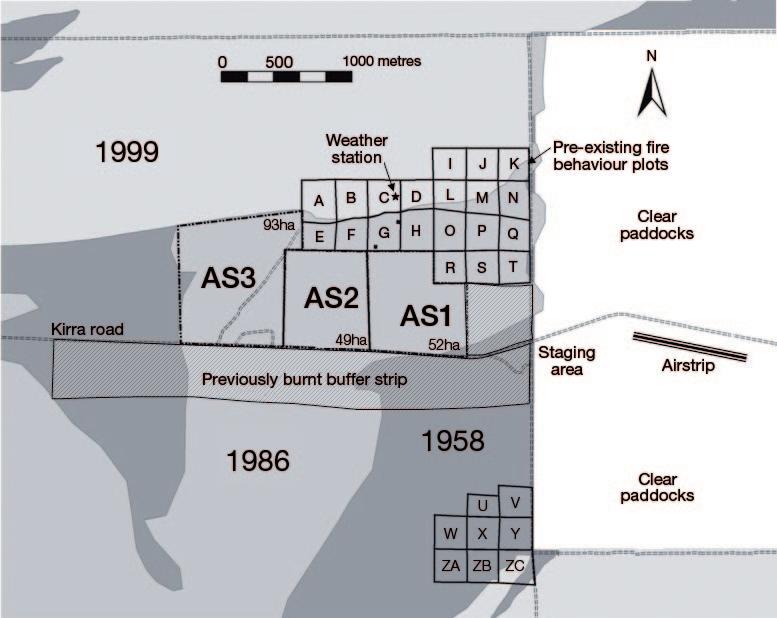

Figura 8. Exemples del tipus de combustible present a les parcel·les. A l’esquerra, mallee de vint anys. A la dreta, heath de vint anys.
Per tal de modelitzar el comportament del foc i obtenir les condicions mínimes per a una propagació consistent (és a dir, que no fos una crema marginal), era necessari conèixer el percentatge i la distribució de l’àrea exempta de combustible, on només hi havia sorra. Amb aquest objectiu, es recorregueren els transsectes anotant a cada metre què era el que hi havia.
Pel que fa a la instrumentació de les parcel·les, cal destacar, d’una banda, que es va estudiar el patró de vents a diverses parcel·les mitjançant la col·locació d’una torre de 10 m d’altura equipada amb anemòmetres d’ultrasons. D’altra banda, per tal de fer el seguiment del comportament del foc, es va disposar d’una malla de termoparells distribuïda uniformement per tota la parcel·la; dues torres amb quatre i vuit sensors de flux de calor, respectivament, que es col·locaven instants abans de la ignició mirant frontalment a l’avanç del front de flames amb l’objectiu de captar la part del perímetre amb més intensitat, així com càmeres de vídeo convencional, degudament protegides. A més, també es realitzaven observacions in situ gràcies als investigadors, que, situats a prop del foc, anaven anotant la posició i la geometria del front de flames (figura 9).
Un dels objectius d’aquesta campanya experimental, com ja s’ha esmentat anteriorment, era realitzar un estudi sobre l’efectivitat dels productes retardants a escala real. Amb aquesta finalitat, es va preparar tota la infraestructura necessària per poder-lo dur a terme, tant pel que fa a les instal·lacions per a la càrrega dels productes com a la pista
25 recerc A en incendi S fore STALS: creme S e X perimen TALS A A u ST r ÀL i A
Figura 7. Esquema de la distribució de parcel·les a l’Ngarkat Conservation Park.
Font: Cruz et al., 2010.
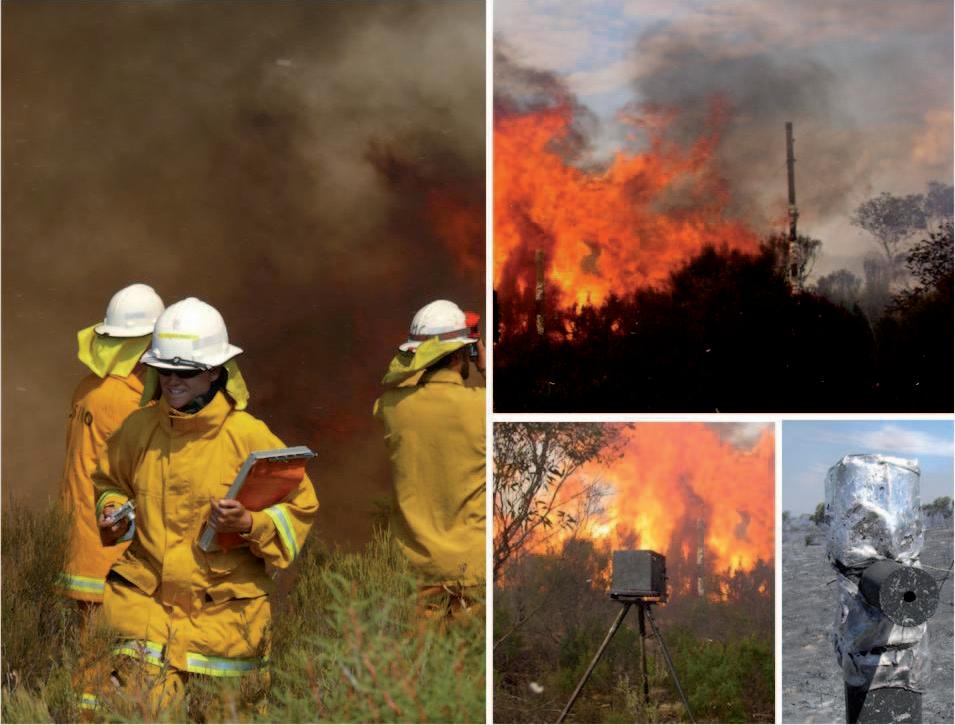

d’aterratge construïda expressament per a aquestes proves (figura 10). Es va comptar amb dos avions bombarders (Airtractor AT-802F) i un avió de control i es van provar tres tipus de productes retardants a les parcel·les de dimensions més grans. A la parcel·la AS1 es treballà amb gel superabsorbent, a l’AS2 amb escumes i a l’AS3 amb un retardant a llarg termini. A les dues primeres, els avions bombarders varen treballar tal com ho haguessin fet en un incendi real, amb atac directe, realitzant les descàrregues en els flancs i atacant també el front quan es podia. En el cas del retardant a llarg termini, l’atac fou indirecte, creant unes franges on s’esperava que el front s’aturaria.
Per fer el seguiment d’aquestes proves, s’utilitzà una càmera de termografia infraroja (TIR) juntament amb una càmera de vídeo convencional d’alta resolució, manejades des d’un helicòpter (figura 11). Una de les tasques més importants per poder utilitzar posteriorment les

imatges aèries fou situar referències calentes (bidons amb llenya cremant) a punts estratègics coneguts del contorn de la parcel·la per tal que fossin captades per la càmera TIR i, d’aquesta manera, les imatges estiguessin en tot moment georeferenciades.
Execució de les proves
Pel que fa a l’execució de les proves, es va comptar amb un gran desplegament de mitjans: disset investigadors, seixantacinc persones de suport (majoritàriament bombers), disset vehicles i quatre mitjans aeris. La campanya experimental va durar un mes, durant el qual es va comptar amb cinc dies de crema, és a dir, cinc dies amb les condicions adequades per poder realitzar les proves. Cal dir que es va haver de donar per finalitzada la campanya abans del que estava previst, perquè les condicions meteorològiques empitjoraren molt i no es podia garantir el control total dels experiments. Els experiments es realitzaren en condicions meteorològiques amb temperatures d’entre 30 ºC i 35 °C, humitats

26 e u LÀL i A pLA n AS , eLSA pAST or i Yo LA nd A p érez
la tecnologia avui
Figura 9. A l’esquerra, investigadors realitzant observacions in situ. A la dreta a dalt, torre amb sensors de flux de calor. A la dreta a baix, càmera de vídeo degudament protegida i sensor de flux de calor després d’haver-hi passat les flames.
Figura 10. Infraestructura per a la realització de les proves per a l’estudi sobre l’efectivitat dels retardants.
Figura 11. Helicòpter equipat amb càmera TIR i vídeo d’alta resolució. A la part inferior dreta, detall de les referències calentes utilitzades com a georeferències.
Figura 12. Desenvolupament de l’experiment efectuat a la parcel·la AS2 (49 ha). A l’esquerra, vista des del sòl. A la dreta a dalt, vista aèria amb càmera de vídeo. A la dreta a baix, vista aèria amb càmera TIR.
relatives al voltant del 10 %, velocitats del vent de 25 km/h i humitats del combustible fi inferiors en molts casos al 5 %. En aquells experiments en els quals es buscava el llindar de propagació «crema / no crema», es van buscar condicions menys dures i es van executar les cremes a primera hora del matí, quan les humitats encara eren elevades.
Els patrons d’ignició utilitzats van ser lineals, amb dues torxes de degoteig partint del punt central de la línia d’ignició programada, sempre perpendicular a la direcció del vent. En aquells casos en què la direcció del vent fluctuava, la línia d’ignició es feia dibuixant un angle recte.
En total es van fer disset experiments, dels quals catorze estaven dedicats a l’estudi sobre el comportament del foc i tres a l’estudi sobre l’eficàcia dels productes retardants. En la figura 12 es pot veure l’evolució de l’experiment efectuat a la parcel·la AS2, utilitzat per a l’estudi de l’efectivitat dels productes retardants.
Resultats
Durant l’execució d’aquests experiments es varen obtenir un gran nombre de dades, tant de caracterització del combustible com de comportament del foc, efecte dels productes retardants, etcètera. Durant els tres anys que fa que es van dur a terme aquestes cremes, els grups de recerca que hi van participar han anat processant totes les dades i els resultats obtinguts s’estan començant a publicar (Cruz et al. , 2010; Plucinski et al., 2010; Pérez et al., 2011).
Des del Centre d’Estudis del Risc Tecnològic de la Universitat Politècnica de Catalunya s’ha estat treballant en l’obtenció d’una metodologia que permeti quantificar l’efectivitat dels productes retardants a partir de les imatges infraroges captades amb la càmera TIR des de l’aire (Cubells, 2009).
La metodologia desenvolupada s’ha implementat mitjançant l’entorn de programació matemàtica MATLAB®. El conjunt d’aplicacions desenvolupades permet rectificar i georeferenciar de manera semiautomàtica les imatges infraroges dels incendis objecte d’estudi, localitzar amb una gran precisió la zona on ha caigut la descàrrega aèria de retardant, analitzar la morfologia d’aquesta descàrrega i calcular, entre altres atributs, els paràmetres característics que denoten l’efecte immediat i perllongat del retardant sobre el foc, com ara la velocitat de propagació del foc (figura 13) i el gradient de temperatures que experimenta la zona del perímetre de l’incendi atacat (figura 14).
La metodologia desenvolupada permet donar resposta a una llista de qüestions
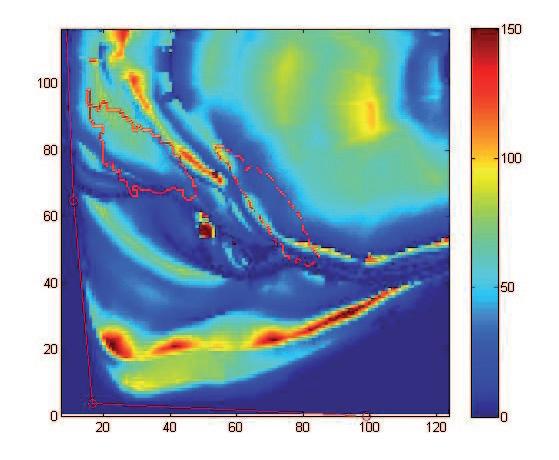
13. Camp de velocitats de l’incendi AS2-E amb les descàrregues 1 (línia discontínua) i 2 (línia contínua) sobreposades. Unitats dels eixos en píxels i de les velocitats en m · min-1
clau que s’ha confeccionat a partir de la revisió bibliogràfica realitzada i que té per objectiu avaluar l’eficàcia de l’atac aeri pel que fa a la tàctica d’extinció emprada, el tipus de producte aplicat i l’execució de les descàrregues.
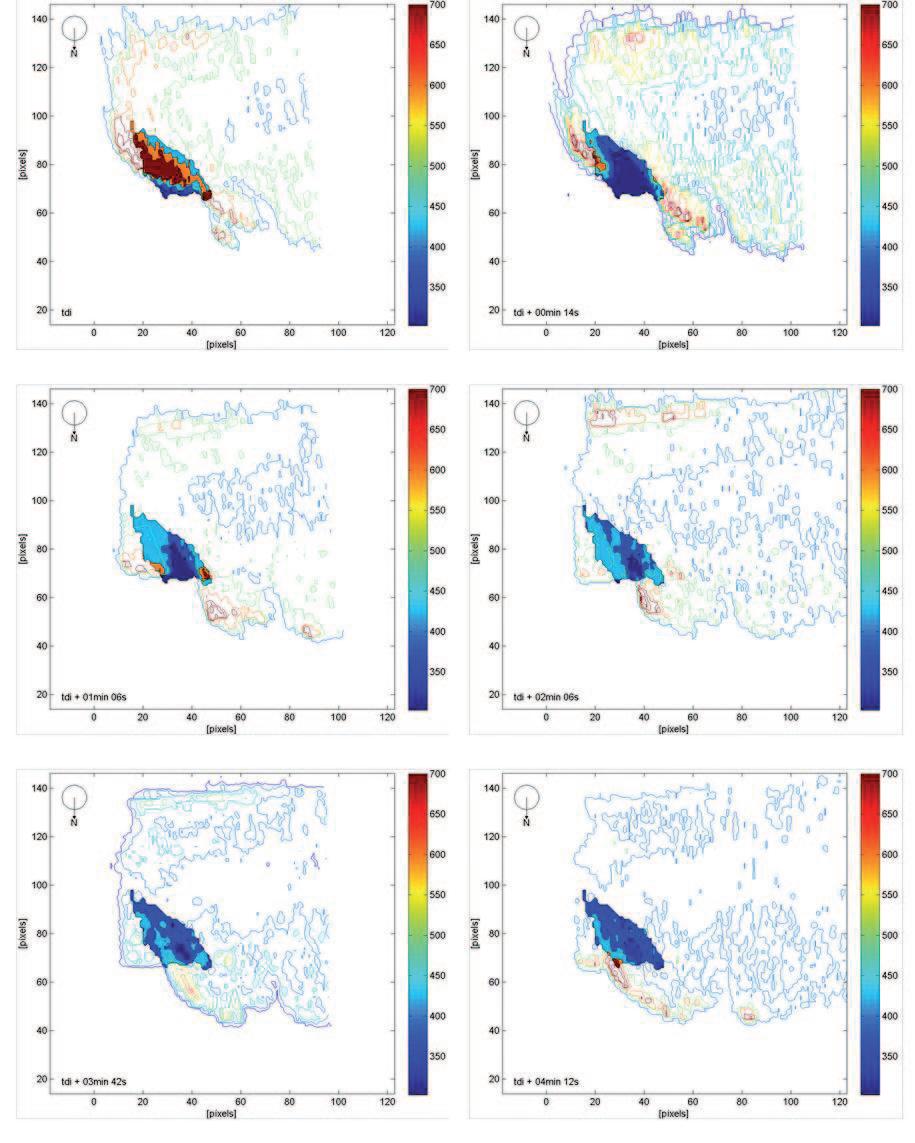
Figura 14. Seqüència d’imatges posteriors a la descàrrega 2 sobre el terreny AS2-E. L’escala de colors indica la temperatura en graus Kelvin. Tdi correspon a l’instant de temps previ a l’arribada de la descàrrega al sòl.
27 recerc A en incendi S fore STALS: creme S e X perimen TALS A A u ST r ÀL i A
Figura
D’aquest estudi, se’n conclou, també, que la termografia infraroja és una tecnologia molt potent per a l’estudi no només del foc, sinó també dels atacs que s’hi realitzen. Un dels avantatges principals que aporta és la possibilitat d’extreure dades quantitatives de les imatges enregistrades. A més, permet visualitzar fenòmens que s’esdevenen al llarg d’un incendi i que són del tot impossibles d’apreciar a ull nu o amb càmera d’espectre visible. ■
Bibliografia
Cruz, M. G. [et al.]. Fire dynamics in mallee-heath: Fuel, weather and fire behaviour prediction in south australian semi-arid shrublands. Bushfire Cooperative Research Centre Report NO. A.10.01. Canberra, 2010.
Cubells, M. Desenvolupament d’una metodologia basada en termografia infraroja per a l’anàlisi quantitativa de l’eficàcia de productes químics en l’extinció d’incendis forestals. Projecte final de carrera. Escola Tècnica Superior d’Enginyeria Industrial de Barcelona, 2009.
Flannigan, M. D. [et al.]. «Implications of changing climate for global wildland fire». International Journal of Wildland Fire, vol. 18 (2009), p. 483-507.
Gill, M.; Moore, P. H. R. «Fire intensities in eucalypt forests of south-eastern Australia». A: International Conference on Forest Fire Research, Coimbra, Portugal. Proceedings. 1990, B.24, p. 1-12.
«Fire situation in Australia». IFFN, núm. 26 (2002), p. 2-8. <http://www.fire.uni-freiburg.de/iffn/country/au/ au_8.htm>
McArthur, A. G. Fire behaviour in eucaliptus forests. Forest Research Institute. Forest and Timber Bureau of Australia, 1967. [Fullet 107]
Pérez, Y. [et al.]. «Computing forest fires aerial suppression effectiveness by IR monitoring». Fire Safety Journal, vol. 46, núm. 1-2 (gener-febrer 2011), p. 2-8.
Plucinski, M. [et al.]. Project FuSE aerial suppression experiments, Ngarkat Conservation Park, South Australia, March 2008 Bushfire Cooperative Research Centre Report. Canberra, 2010.
28 e u LÀL i A pLA n AS , eLSA pAST or i Yo LA nd A p érez
la tecnologia avui
RO b OTS HUMANOIDES I TECNOLOGIA p ER ASSISTIR LA MARXA HUMANA
Josep Maria Font-Llagunes
Departament d’Enginyeria Mecànica. Escola Tècnica Superior d’Enginyeria Industrial de Barcelona. Universitat Politècnica de Catalunya
Introducció
L’ anàlisi i la comprensió dels principis físics de la marxa humana són fonamentals per a moltes aplicacions, entre les quals destaquen el desenvolupament de robots humanoides i el de dispositius d’assistència i rehabilitació per a persones amb dificultats motrius. En l’àmbit de la robòtica humanoide, s’utilitza la marxa humana com a punt de partida per definir i controlar el moviment dels robots bípedes. En canvi, en l’àmbit de l’enginyeria de rehabilitació, es parteix de l’anàlisi dinàmica de la marxa de persones amb dificultats motrius (per identificar el seu problema neuromotor) i, a partir d’aquest resultat, es dissenyen dispositius mecànics que assisteixen el moviment d’aquestes persones per fer-lo el més semblant possible al de les persones sanes.
La recerca i desenvolupament de robots humanoides va néixer fa aproximadament quaranta anys al Japó. Tot i els anys de treball dedicats a aquest camp, avui en dia l’anatomia humana és encara —de lluny— molt més versàtil, estable i autònoma que aquestes màquines i, per tant, continua essent la referència a l’hora de desenvolupar aquest tipus de robots. A llarg termini, la principal aplicació que se’n preveu és la de realitzar tasques quotidianes i domèstiques per ajudar les persones, sobretot la gent gran. Aquesta tasca es pronostica com a important en el futur, per l’envelliment de la població i l’allargament de l’esperança de vida al món occidental. Avui en dia, però, existeixen ja alguns robots humanoides construïts amb l’única finalitat d’entretenir, com per exemple el Sony QRIO o el WowWee Robosapien.
El camp de l’enginyeria de rehabilitació ha tingut una gran evolució en els últims anys gràcies als avenços en l’anàlisi biomecànica de la marxa humana i en la robòtica. Les primeres patents d’ortesis per assistir la marxa de pacients amb discapacitat motriu daten de principi dels anys quaranta. Aquestes eren totalment mecàniques i rígides. Els coneixements actuals permeten el disseny de dispositius d’assistència (com pròtesis, ortesis passives o actives i exosquelets) que incorporen una quantitat d’elements mecànics i electrònics per optimitzar la marxa del pacient. Tot i el
gran terreny recorregut, encara queda molt per fer en aquest camp, la rehabilitació, en el qual el gran repte segueix essent desenvolupar estratègies de control que interactuïn de manera coordinada i eficient (des d’un punt de vista energètic) amb el sistema neuromuscular del cos humà.
En aquest article es fa una anàlisi de l’estat de la qüestió en aquests sectors tecnològics: la robòtica humanoide i l’enginyeria de rehabilitació. S’hi enumeren també els objectius científics que afronten avui en dia els investigadors, així com els reptes tecnològics i científics que queden per abordar en els propers anys.
Robòtica humanoide
La robòtica humanoide neix a principi dels anys setanta quan la Universitat de Waseda (el Japó) desenvolupa el primer robot bípede, WABOT-1 (1973),1 el qual ja era capaç de caminar. Des d’aleshores, un gran nombre de companyies i de grups de recerca s’han dedicat a aquest sector. L’estat de l’art actual de la robòtica humanoide engloba gran quantitat de models que es classifiquen en dos grans grups, depenent de l’estratègia que s’utilitzi per al control de la marxa.
El primer grup engloba robots basats en un criteri d’estabilitat local, que s’assoleix controlant la posició del punt on el moment resultant horitzontal de les forces de contacte del robot amb el terra és zero (en anglès, zero moment point, ZMP) (Vukobratovic, Frank i Juricic, 1970; Vukobratovic i Borovac, 2004; Kuo, 2007). Aquests robots són normalment antropomòrfics i versàtils. A més de caminar, poden realitzar una gran quantitat de tasques i moviments. Aquest és l’enfocament més clàssic dins la robòtica humanoide i té els seus orígens en el control convencional dels manipuladors industrials.
El segon grup, en canvi, engloba robots basats en un criteri d’estabilitat orbital al llarg d’un cicle límit que es va repetint periòdicament. D’aquí que en anglès s’anomenin limit cycle walkers (Hobbelen, 2008), o
1. <http://www.humanoid.waseda.ac.jp/history.html>.
29 R evista de T ecnologia , núm. 4 (2011), p. 29-38 • ISSN (ed. impresa): 1698-2045 • ISSN (ed. electrònica): 2013-9861 • DOI: 10.2436/20.2004.01.10 • http://revistes.iec.cat/index.php/ RTEC
la tecnologia avui
també dynamic walkers. Aquest enfocament és posterior i deriva del concepte passive dynamic walking introduït a final dels anys vuitanta (McGeer, 1990). Aquests robots estan dissenyats per imitar el moviment de marxa de les persones i la seva recerca ha permès entendre molts principis físics de la marxa humana (Kuo, 2001; Kuo, Donelan i Ruina, 2005; Donelan, Kram i Kuo, 2002).
Robots basats en el control del ZMP
La tècnica de control basada en el ZMP imposa que aquest punt es trobi sobre l’àrea de suport del peu en contacte amb el terra. Quan aquesta condició es compleix, el peu es troba en situació estàtica i es té una total controlabilitat del moviment del robot. El moviment s’imposa mitjançant lleis temporals explícites per als angles relatius de les articulacions (control de posició). Mitjançant aquesta tècnica, es garanteix l’estabilitat local del robot durant tot el cicle de la marxa. Aquests robots són flexibles i versàtils, ja que poden realitzar, a més del moviment de marxa, altres tasques com pujar escales, restar drets, ballar o, fins i tot, xutar una pilota. En són exemples el robot Honda ASIMO (Hirai et al., 1998), o bé el Sony QRIO (Ishida, 2004), que es mostren en les figures 1a i 1b, respectivament. El primer és un robot dissenyat amb la perspectiva que d’aquí a uns anys pugui ser utilitzat per assistir les persones, mentre que el segon ha estat concebut per a l’entreteniment.
Malgrat els avantatges comentats, aquests robots tenen una sèrie de limitacions. En primer lloc, la controlabilitat del ZMP exigeix evitar singularitats cinemàtiques del robot, com per exemple l’extensió total del genoll, i disse-

nyar els peus amb una superfície de contacte plana i àmplia (per tenir prou espai on es pugui situar el ZMP). Aquests inconvenients fan que la marxa que duen a terme aquests robots s’allunyi del patró de la marxa humana, en la qual el nostre cervell no porta a terme aquesta estratègia de control tan exhaustiva. Una conseqüència d’utilitzar aquesta estratègia és que el consum energètic d’aquests robots és molt elevat, cosa que fa que la seva autonomia sigui baixa: les bateries acostumen a durar aproximadament una hora. Com a mesura objectiva del consum energètic d’un robot s’utilitza l’anomenat cost energètic específic (CEE), que es defineix com:
Energia utilitzada
CEE = Pes × distància recorreguda
D’aquesta manera, la quantitat obtinguda en el SI (sistema internacional) és adimensional (J · N–1 · m–1), fet que permet comparar amb objectivitat diferents tipus de locomoció bípeda. Per mitjà d’aquest paràmetre, s’observa com el CEE del robot Honda ASIMO per al seu moviment de marxa (CEE = 3,2) (Collins et al., 2005) és deu vegades superior al de la marxa humana, avaluat a partir del consum d’oxigen (CEE = 0,3) (Donelan, Kram i Kuo, 2002). L’energia utilitzada per caminar prové de diferents fonts en els dos casos anteriors: energia elèctrica subministrada per les bateries als motors i energia metabòlica generada per l’organisme a partir de l’oxigen que es transmet al sistema muscular. Tot i això, la mesura del CEE s’ha acceptat àmpliament per comparar l’eficiència energètica de sistemes mòbils de diferent naturalesa (Collins et al., 2005; Kuo, 2007).
Una de les raons de l’elevat cost energètic dels robots humanoides descrits fins ara és el fet de caminar perma-

30 j o S ep mA ri A f on T -L LAG une S
a) b) la tecnologia avui
Figura 1. Exemples de robots controlats amb el criteri d’estabilitat local basat en la posició del ZMP: Honda ASIMO (a) i Sony QRIO (b).
Trajectòria del centre de masses
Fase de doble recolzament
Cama de balanceig
Parell d’extensió
Cama de recolzament
Fase de recolzament simple
nentment amb les cames flexionades, per evitar singularitats cinemàtiques i, en conseqüència, la pèrdua de controlabilitat del moviment. En la figura 2 es mostra un esquema de les fases del moviment d’aquest tipus de robots: fase de doble recolzament i fase de recolzament simple. Com es veu en la figura, en la primera fase, el ZMP es troba situat entre els dos peus en contacte amb el terra. En la segona, el control imposa que aquest punt estigui situat sobre la superfície de contacte del peu. La trajectòria del centre de masses, situat aproximadament a l’altura dels malucs, es defineix normalment en un pla horitzontal.
La gran controlabilitat i versatilitat que ofereix el control per ZMP té com a contrapartida, com ja s’ha dit, la manca d’eficiència energètica. La flexió de la cama de recolzament (necessària per garantir que la trajectòria del centre de masses sigui horitzontal i per evitar singularitats cinemàtiques) requereix un parell d’extensió important en
Figura 2. Fases del moviment de marxa en els robots amb control basat en el ZMP.
l’articulació del genoll per suportar el pes del robot, amb el consegüent cost energètic que això comporta. De fet, si nosaltres mateixos provem de caminar flexionats (imitant el moviment d’un robot basat en el control ZMP), veurem que ens cansem de manera més ràpida, ja que hi ha més músculs que s’han d’activar i, per tant, el cost metabòlic augmenta.
Una altra causa de l’elevat cost energètic està relacionada amb el fet que tot moviment articular està permanentment controlat mitjançant un actuador que imposa un moviment predefinit. Per tant, hi ha un consum energètic continu tant si l’actuador aporta energia al sistema (funció motora) com si en treu (funció de fre). Cal dir que part de l’energia mecànica que s’extreu del sistema mecànic quan es frena el moviment articular pot recuperar-se, però en situacions pràctiques l’eficiència d’aquesta regeneració no supera el 30 % (Kuo, 2007).
Cicle límit en l’espai d’estats
Fase de balanceig
Fase de recolzament
Estat inicial
3. Sistema passiu (compass-gait passive walker) i cicle límit obtingut.
31 robo TS H um A noide S i T ecno L o G i A per ASS i ST ir LA m A r XA H um A n A
ZMP
−0,4 −0,3 −0,2 −0,1 0 0,1 0,2 0,3 0,4 −2 −1,5 −1 −0,5 0 0,5 1 1,5 2 2,5 θ (rad) θ (rad/s)
Impacte α θst g mH a θsw m, IC b P i j k m, IC
walker
Impacte
Compass-gait passive
Figura
Limit cycle walkers
El segon grup de robots es basa en un concepte d’estabilitat orbital al llarg d’un cicle límit. Aquests robots tenen com a punt de partida el concepte passive dynamic walking (McGeer, 1990), a través del qual es va demostrar com un simple mecanisme format per dues barres articulades pot baixar per un pendent sense cap actuació ni control extern amb un moviment cíclicament estable —sorprenentment— molt semblant al de la marxa humana. En la figura 3 es mostra un model de sistema passiu estudiat a Font-Llagunes (2008) i el cicle límit obtingut per un pendent α = 3º representat a l’espai d’estats (θ, θ), on θ és l’angle d’una de les cames.
En el gràfic de la dreta de la figura 3 s’observa la simulació dinàmica de l’evolució del model, a partir de l’estat inicial indicat pel cercle vermell, en l’espai d’estats del sistema. S’hi observa com després de dos cicles (dos passos del sistema bípede) el sistema evoluciona de manera cíclicament i orbitalment estable. A la trajectòria de l’espai d’estats que es va repetint indefinidament de manera periòdica se l’anomena cicle límit. Les dues rectes verticals del cicle límit corresponen als impactes del taló (heel-strike), en els quals es produeix un canvi sobtat de la velocitat del sistema per a una configuració constant. En aquest moviment, el canvi d’energia potencial gravitatòria associat al moviment de baixada i la pèrdua energètica per l’impacte del taló (xoc inelàstic) es compensen en un cicle. Per tal d’assolir un moviment periòdic estable, cal donar al mecanisme unes condicions inicials adequades. Si aquestes són lluny del cicle límit, el sistema evolucionarà d’una manera diferent i no estabilitzarà el seu moviment.
En la figura 4a es mostra un d’aquests mecanismes simples capaços de «caminar» pendent avall. Al llarg de la dècada dels noranta es van desenvolupar altres mecanismes totalment passius més complexos, com el que es mostra en la figura 4b, que té moviment tridimensional i

que inclou l’articulació del genoll i dels braços (Collins, Wisse i Ruina, 2001).
Aquests mecanismes passius capaços d’imitar la marxa humana, amb la limitació de fer-ho només sobre petits pendents per raons energètiques, van inspirar diversos investigadors per idear i construir robots bípedes àmpliament passius, però que incorporen una mínima actuació per permetre la marxa sobre un terra horitzontal (Collins et al., 2005). Aquests són els anomenats limit cycle walkers o solament dynamic walkers. La filosofia de la seva actuació, no obstant això, és diferent de la dels robots versàtils comentats anteriorment (basats en el control del ZMP). En el cas dels limit cycle walkers, l’actuació és mínima i, des d’un punt de vista mecànic, la seva funció no és tant imposar un moviment predefinit, sinó transferir al sistema prou energia mecànica per fer front a les pèrdues (associades a fricció, col·lisions, etc.), de manera que es pugui assolir una marxa cíclicament estable. En aquest cas, l’estabilitat del moviment no s’estudia mitjançant criteris d’estabilitat local, sinó mitjançant criteris associats a eines de la dinàmica caòtica, com són la secció de Poincaré, el cicle límit i els multiplicadors de Floquet, que són els indicadors de la propagació de les petites pertorbacions al llarg del cicle límit (Hobbelen, 2008).
Alguns exemples de robots desenvolupats sota aquesta premissa són el robot Flame (Hobbelen, 2008), el Cornell Biped (Collins et al., 2005) i el MIT Learning Biped (Tedrake, Zhang i Seung, 2004). Aquests robots apareixen en el mateix ordre en les figures 5a, 5b i 5c. S’ha demostrat que el CEE d’aquests robots és un ordre de magnitud inferior al dels robots basats en el ZMP. Per exemple, el Cornell Biped té un CEE de 0,2 (Collins et al., 2005); per tant, el seu CEE és del mateix ordre de magnitud que el de la marxa humana (CEE = 0,3).
La semblança entre el cost energètic d’aquests robots i el de la marxa humana no sorprèn si tenim en compte que les persones, quan caminem, ens regim per un criteri

32 j o S ep mA ri A f on T -L LAG une S
(passive dynamic walking):
bidimensional (a) i moviment
a) b) la tecnologia avui
Figura 4. Mecanismes capaços de caminar pendent avall sense cap actuació ni control
moviment
tridimensional (b).
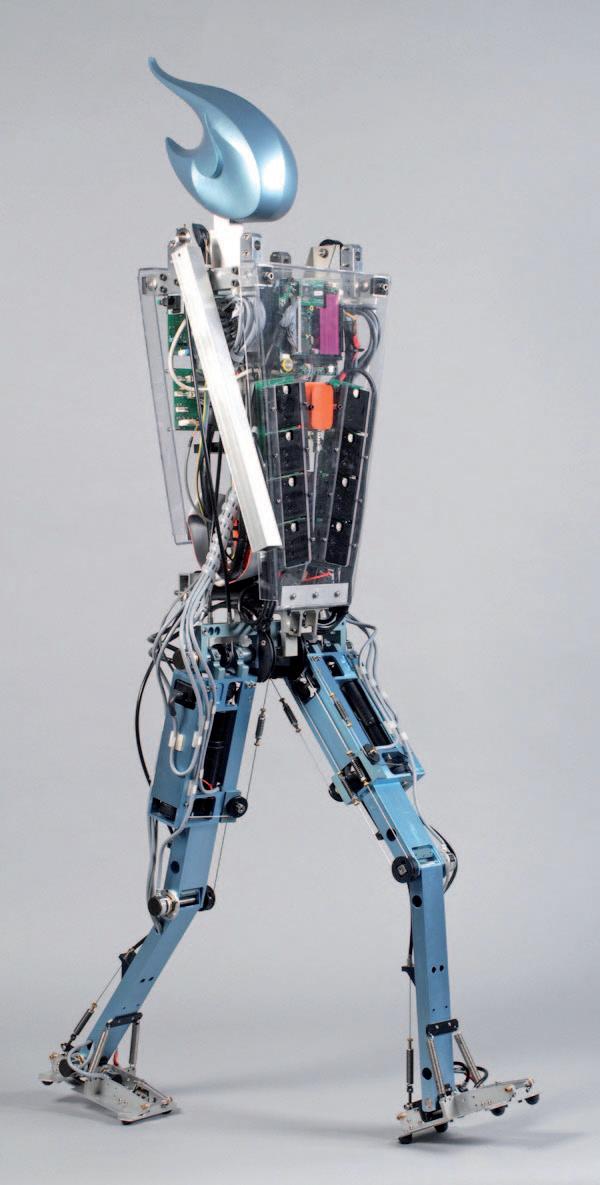
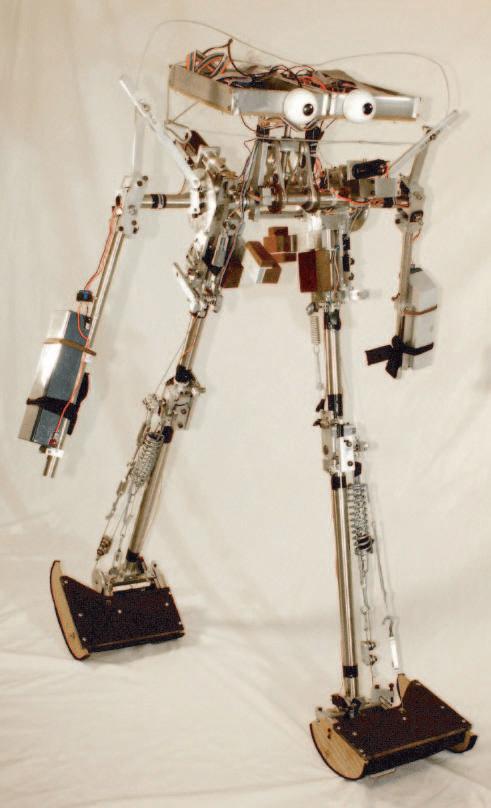
d’optimització energètica, és a dir, ens movem de manera que el cost energètic sigui mínim per evitar la fatiga. Això fa que en el moviment de marxa aprofitem molts moviments del cos que es produeixen de manera natural (per la mateixa dinàmica del moviment) sense la necessitat d’actuació muscular. Aquest fet també és present en el moviment dels robots representats en la figura 5, que, lluny d’imposar un control de posició en cada articulació, tenen alguns graus de llibertat totalment passius. Aquests robots també incorporen elements elàstics que permeten emmagatzemar i alliberar energia mecànica en diferents fases del cicle de marxa, conduint així a un consum energètic menor. En el nostre cos, el paper d’aquests elements elàstics el fan els tendons, que uneixen el teixit muscular amb l’esquelet. En la figura 6 es mostren esquemàticament les fases del cicle de marxa dels robots basats en el limit cycle walking:
Velocitats abans i després
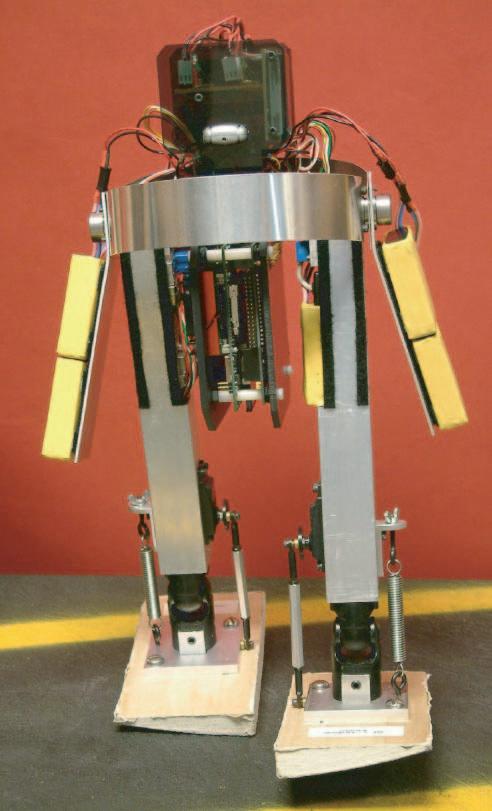
l’impacte del taló (modelitzat com a instantani) i la fase de recolzament. En la fase de recolzament, el genoll de la cama que està en contacte amb el terra està bloquejat per un topall mecànic passiu, el que fa que aquesta cama faci un moviment de pèndol invertit i que el centre de masses del cos (situat aproximadament a l’altura del maluc) realitzi una trajectòria circular. Aquest moviment circular del centre de masses pot realitzar-se, negligint les pèrdues per resistències passives, pràcticament sense cap aportació d’energia mecànica. D’altra banda, la cama que oscil·la també duu a terme un moviment pendular al voltant de l’articulació del maluc amb la finalitat de situar-se al davant abans del xoc del taló. Aquest moviment és també essencialment passiu. Per tant, la pèrdua energètica més significativa durant el cicle apareix en el moment de l’impacte del taló (Font-Llagunes i Kövecses, 2009; Kuo, 2002). Com
Trajectòria del centre de masses
Moviment pendular de la cama de balanceig
Impacte
Bloqueig passiu
Moviment pendular de la cama de recolzament
Impacte del taló Fase de recolzament
33 robo TS H um A noide S i T ecno L o G i A per ASS i ST ir LA m A r XA H um A n A
Figura 5. Robots bípedes basats en el limit cycle walking: a) Flame (Hobbelen, 2008), b) Cornell Biped (Collins et al., 2005) i c) MIT Learning Biped (Tedrake, Zhang i Seung, 2004).
a) b) c)
Figura 6. Fases del moviment de marxa en els robots basats en el limit cycle walking

que el moviment de marxa és periòdic, en un moviment horitzontal aquestes pèrdues energètiques s’han de compensar amb aportacions d’energia mecànica en el decurs del cicle (per mitjà de motors). En realitzacions pràctiques, normalment s’opta per actuar el turmell de la cama de recolzament, o bé l’articulació del maluc (Kuo, 2002).
En l’impacte del taló (imatge de l’esquerra de la figura 6), el centre de masses redirigeix la seva trajectòria d’un arc de circumferència al següent. La seva velocitat abans i després apareix esquematitzada pels vectors vermell i verd, respectivament. En l’instant del xoc es produeix una disminució de la seva velocitat. En el moment del xoc, el peu del darrere se separa del terra pràcticament al mateix instant, de manera que la fase de doble suport es pot considerar pràcticament instantània.
El principal inconvenient que presenten aquests robots, comparats amb els basats en el ZMP, és que són menys versàtils, ja que estan dissenyats especialment per ser molt eficients en el moviment de marxa. De fet, aquests robots no poden ni tan sols mantenir-se drets sense un suport extern. No obstant això, la recerca en aquest tipus de sistemes robòtics ha permès explicar molts fenòmens físics presents en la marxa de les persones, com

tecnologia per assistir la marxa humana
L’altre sector tecnològic en el qual es requereix un coneixement dels aspectes dinàmics de la marxa humana és l’enginyeria de rehabilitació. Existeixen diferents tipus de dispositius per assistir la marxa humana: pròtesis, ortesis i exosquelets. Les pròtesis es caracteritzen per substituir una part del cos (figura 7a), mentre que les ortesis i els exosquelets són dispositius externs al cos que realitzen forces sobre aquest per millorar-ne la motricitat (figura 7b).
D’ortesis, n’hi ha de passives, quan no inclouen cap actuació, i d’actives, si inclouen actuadors que complementen la musculatura per afavorir la mobilitat. En aquest apartat ens referirem sobretot a les ortesis i els exosquelets actius. Abans, però, es parla breument sobre l’anàlisi dinàmica inversa de la marxa humana, ja que conduir aquesta anàlisi és necessari per identificar la disfunció del pacient en el sistema motor i poder dissenyar, en un estadi posterior, el dispositiu ortètic d’assistència.
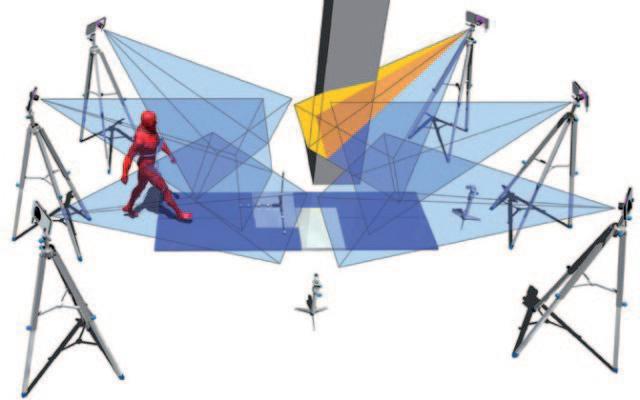

34 j o S ep mA ri A f on T -L LAG une S
es fa palès en els treballs de Kuo (2001) i Kuo, Donelan i Ruina (2005).
Figura 7. a) Pròtesi de turmell (MIT Biomechatronics Group) i b) ortesi de turmell passiva (Spears Prosthetics & Orthotics).
a) b) a) b) la tecnologia avui
Figura 8. Sistema de captura del moviment format per càmeres d’infrarojos. a) Muntatge del sistema (BTS Bioengineering) i b) imatge d’una captura real (Universitat d’Otago, Escola de Fisioteràpia).
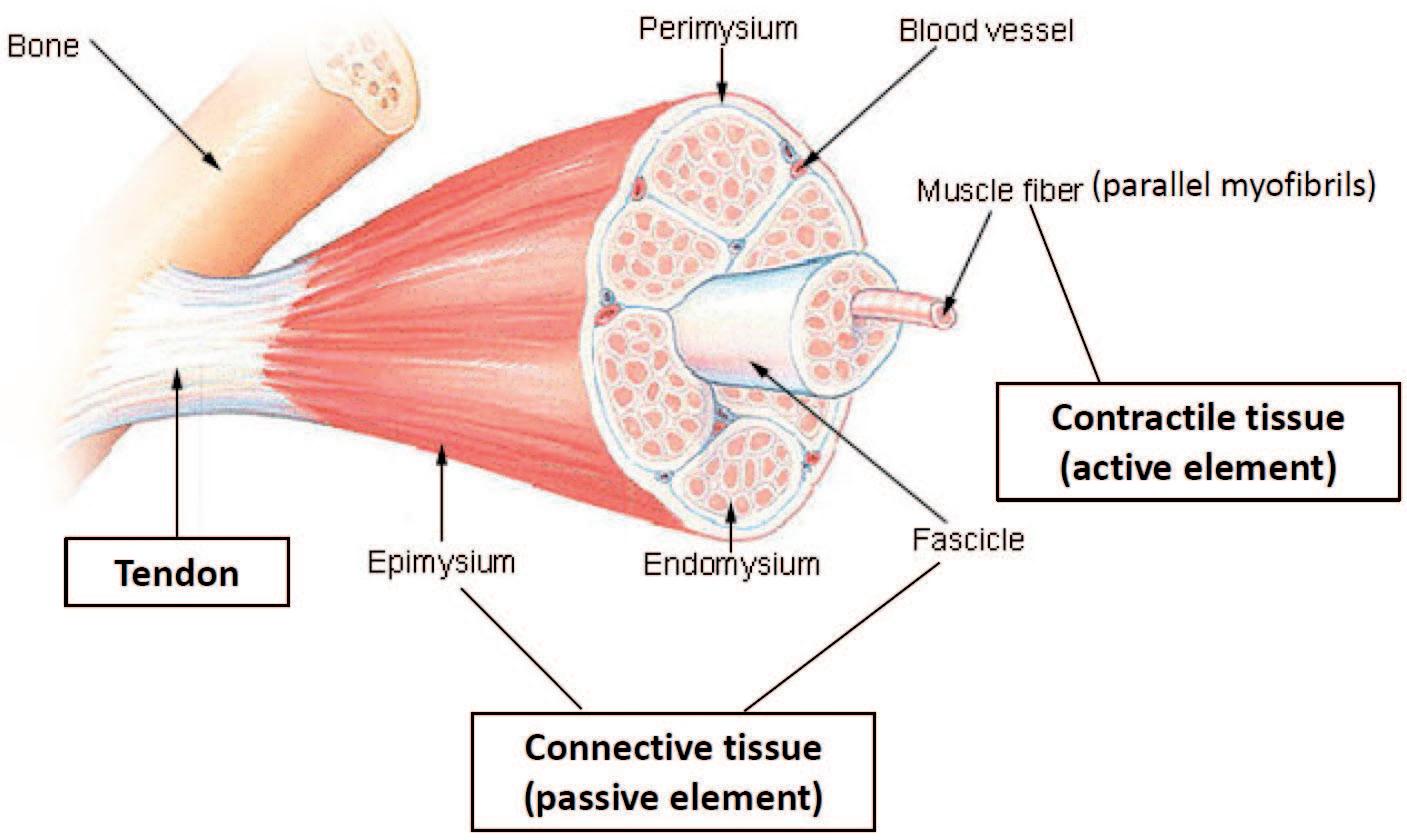
Anàlisi dinàmica inversa de la marxa humana
Els mètodes de la dinàmica de sistemes multisòlid (multibody system dynamics) han estat utilitzats des de principi dels anys noranta per a l’estudi dinàmic de la marxa humana (Ambrosio i Kecskemethy, 2007; Tsirakos, Baltzopoulos i Barlett, 1997). Per realitzar una anàlisi dinàmica inversa, cal capturar el moviment del cos i disposar dels paràmetres antropomètrics (geomètrics i inercials) del model biomecànic de l’individu. Els sistemes de captura del moviment convencionals estan formats per càmeres d’infrarojos que detecten una sèrie de marcadors disposats al cos de l’individu (figura 8). Per validar el model, també s’utilitzen plaques piezoelèctriques que mesuren la força de contacte peu-terra. Conceptualment, l’anàlisi dinàmica inversa consisteix a calcular les forces musculars necessàries per dur a terme el moviment enregistrat.
Els models biomecànics inclouen els sistemes esquelètic, muscular i de control (o sistema neuromotor). El sistema esquelètic es modelitza com un sistema multisòlid format per sòlids rígids, que representen els segments corporals, enllaçats per les articulacions, que es consideren ideals (Ambrosio i Kecskemethy, 2007; Ackermann i Schiehlen, 2006; Rodrigo et al., 2008). Els músculs són els actuadors del sistema esquelètic i constitueixen el sistema muscular. Físicament, es modelitzen com un conjunt d’actuadors lineals disposats entre els punts d’inserció muscular (unió del múscul amb l’esquelet) que imiten el comportament dinàmic de les fibres musculars del cos (Ackermann i Schiehlen, 2006; Rodrigo et al., 2008; Tsirakos, Baltzopoulos i Barlett, 1997; Winters, 1995). Aquest comportament s’estudia mitjançant el model de Hill (Winter, 2005), que es mostra en la figura 9. Aquest modelitza el múscul com un element elàstic en sèrie (tendó, SE) i un element elàstic en paral·lel (teixit connectiu, PE) amb les fibres musculars (element contràctil, CE).
El sistema de control, o sistema neuromotor, coordina l’activitat motriu del cos humà. El fet que cada articulació sigui actuada per diferents músculs a la vegada fa que aparegui el problema de l’actuació redundant. Aquest problema
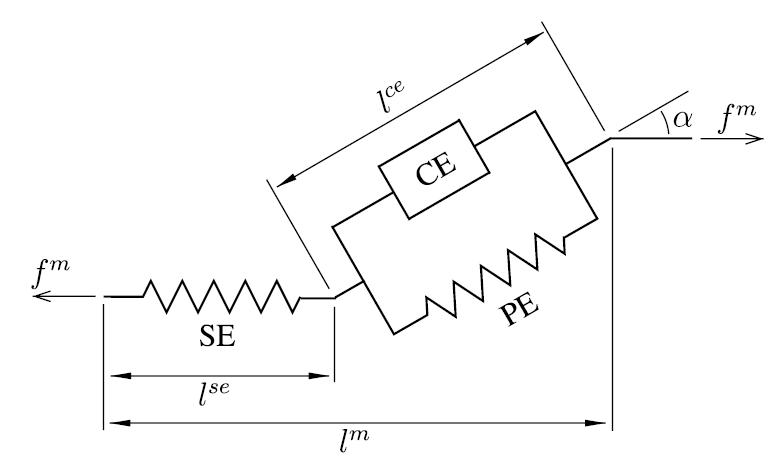
se soluciona mitjançant l’ús de tècniques d’optimització, en les quals la funció objectiu està basada en criteris fisiològics (Ackermann i Schiehlen, 2006; Rodrigo et al., 2008; Anderson i Pandy, 2001). Per exemple, en l’estudi de la marxa de persones sanes, s’utilitza com a criteri la minimització del cost energètic. L’elecció de la tècnica d’optimització adequada és un aspecte important a l’hora d’abordar aquest tipus de problemes, ja que té una influència significativa en el cost computacional i en la convergència en la solució. L’anàlisi dinàmica inversa de la marxa de persones sanes permet trobar els patrons de forces i activacions musculars en la marxa normal (no patològica). La comparació entre aquest patró i el d’una persona amb discapacitats motrius permet definir els criteris per al disseny mecànic dels dispositius d’assistència. Cal dir que actualment hi ha diferents programaris comercials per a la modelització i l’anàlisi dinàmica del moviment del cos humà: Human Figure Modeller, SIMM (Software for Interactive Musculoskeletal Modeling), OpenSim, AnyBody i LifeMOD (basat en ADAMS), entre d’altres. Aquests programes donen solucions molt bones per a l’anàlisi dinàmica de la marxa de persones sanes. No obstant això, els programes tenen limitacions en l’estudi de disfuncions de la marxa i en la simulació de la interacció entre la persona i un dispositiu extern d’assistència.
Dispositius d’assistència i rehabilitació: ortesis i exosquelets
Aquests dispositius s’utilitzen per assistir la mobilitat de persones amb dificultats en la marxa per causa d’hemorràgia cerebral, postpòlio, esclerosi múltiple, lesió medul·lar o paràlisi cerebral, entre d’altres. El terme exosquelet s’utilitza per referir-se a un dispositiu mecànic antropomòrfic que s’ajusta al cos de l’usuari i que es mou de manera coordinada amb els seus moviments. De manera general, aquest terme està associat a un dispositiu que facilita el moviment de persones sanes, és a dir, que en disminueix el cost metabòlic (figura 10a). En canvi, el terme ortesi activa s’utilitza
35 robo TS H um A noide S i T ecno L o G i A per ASS i ST ir LA m A r XA H um A n A
Figura 9. Fisiologia del múscul humà (a) i model de Hill (b) (Ackermann i Schiehlen, 2006). a) b)

per referir-se a un dispositiu mecànic extern que augmenta la capacitat motriu d’una persona amb alguna discapacitat (figura 10b). De vegades, però, també s’utilitza el terme exosquelet si un dispositiu ortètic engloba la totalitat de l’extremitat inferior.
La recerca en dispositius ortètics actius comença a principi dels anys quaranta (Dollar i Herr, 2008). La primera ortesi activa i controlable que es coneix data del 1942 i es tracta d’una patent d’un dispositiu actuat hidràulicament per assistir els moviments del maluc i del genoll (Filippi, 1942). Els primers exosquelets van ser desenvolupats als anys seixanta a la Universitat de Belgrad per assistir pacients paraplègics per causa de lesió medul·lar (Vukobratovic, Ciric i Hristic, 1972; Vukobratovic, Hristic i Stojiljkovic, 1974). Aquests primers prototipus estaven limitats a realitzar únicament moviments predefinits.
En l’última dècada s’ha desenvolupat un gran nombre de dispositius ortètics i de rehabilitació controlables. Aquests dispositius tenen per finalitat afegir o dissipar energia mecànica de manera adequada durant les fases de la marxa humana (Dollar i Herr, 2008). A més d’actuadors (motors, cilindres hidràulics, músculs pneumàtics artificials, etc.), alguns dissenys també utilitzen elements passius (com ara molles) per emmagatzemar o alliberar energia potencial durant la marxa. El control d’aquests dispositius es realitza generalment a partir d’un patró predefinit del moviment articular (control cinemàtic) i dels moments a les articulacions (control de força).
A continuació, se citen diferents dispositius mecànics d’assistència al moviment presents en la bibliografia. Un d’aquests és el conegut dispositiu ortètic per a rehabilitació Lokomat. Aquest utilitza una estratègia de control basada en el moviment (Colombo, Jorg i Dietz, 2000) i és utilitzat per entrenar la musculatura de pacients discapacitats i per reactivar patrons de moviment que es troben a la medul·la del pacient. El RoboKnee és un exosquelet, desenvolupat per Yobotics, Inc. (Cincinnati, Ohio, Estats Units), que aporta energia mecànica a l’articulació del genoll per assistir la marxa de persones sanes que transporten càrrega (Pratt et al., 2004) (figura 10a). El control del
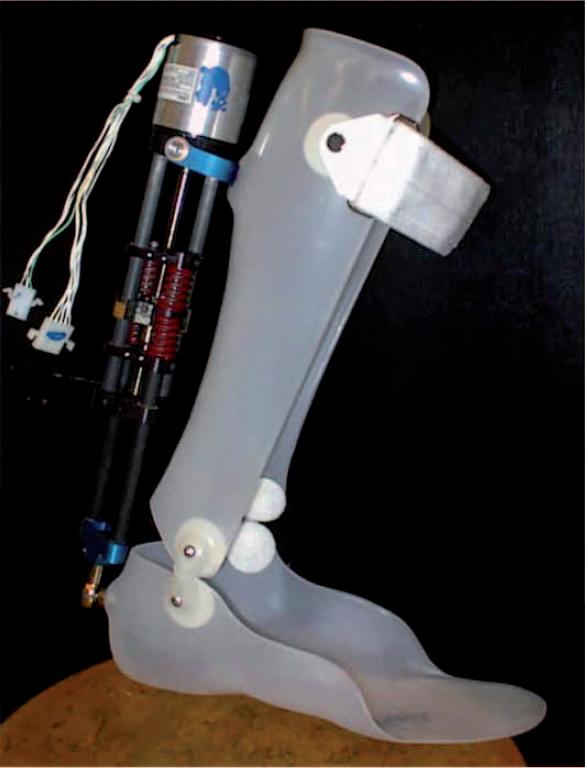
RoboKnee es realitza a partir de la força de contacte peuterra i del seu punt d’aplicació al pla sagital, que es mesuren mitjançant dues cèl·lules de càrrega.
El dispositiu HAL (Hybrid Assistive Leg) (Kawamoto i Sankai, 2002; Kawamoto, Kanbe i Sankai, 2003) actua sobre les articulacions del maluc i el genoll, i per controlar-lo s’utilitzen mesures electromiogràfiques (EMG) de l’activació muscular. També és destacable el model d’ortesi activa de turmell desenvolupat per Blaya i Herr (2004) (figura 10b). Aquest model assisteix la marxa de persones discapacitades que no controlen la flexió del turmell i consisteix en una ortesi passiva AFO (Ankle-Foot Orthosis) modificada mitjançant l’addició d’un actuador lineal amb un element elàstic en sèrie (Series Elastic Actuator, SEA). Mitjançant aquest SEA, es pot canviar la rigidesa del moviment de flexió-extensió del turmell. El control d’aquest model d’ortesi es realitza mitjançant la força de contacte peuterra i l’angle del turmell.
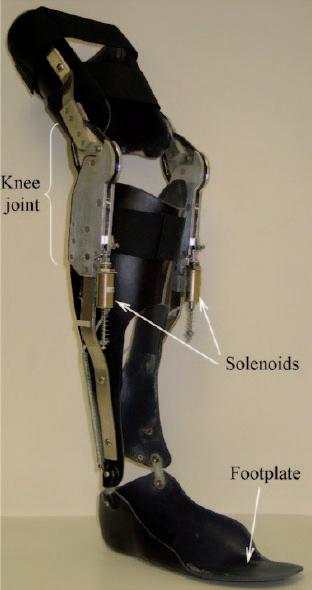
36 j o S ep mA ri A f on T -L LAG une S
Figura 10. a) Exosquelet Yobotics RoboKnee (Pratt et al., 2004) i b) ortesi activa de turmell (Blaya i Herr, 2004).
a
la tecnologia avui
Figura 11. Ortesi activa SC-KAFO (Yakimovich, Lemaire i Kofman, 2006).
) b)
Finalment, cal destacar un grup d’ortesis actives molt utilitzades en la rehabilitació de pacients amb lesió medullar incompleta que presenten musculació als malucs, però que no poden moure l’articulació del genoll (per una manca d’activació del quàdriceps). En aquests casos, s’utilitzen les ortesis SC-KAFO (Stance Control Knee-Ankle-Foot Orthosis), les quals bloquegen automàticament l’articulació del genoll quan la cama pren contacte amb el terra (fet que es detecta mitjançant sensors de força plantar). D’aquesta manera, es garanteix que el genoll estigui en la posició de màxima extensió durant la fase de recolzament. Un exemple n’és l’ortesi desenvolupada per Yakimovich, Lemaire i Kofman (2006) que es mostra en la figura 11.
Línies de treball futures
La recerca en productes tecnològics que tinguin per finalitat la millora de la qualitat de vida de la població és actualment estratègica en els plans de recerca i desenvolupament (R+D) de molts països desenvolupats. És per aquest motiu que cada vegada hi ha més grups, tant d’universitats com d’empreses privades, que es dediquen a desenvolupar projectes relacionats amb la robòtica humanoide o l’enginyeria de rehabilitació. Tot i la gran quantitat de temps i capital humà invertits en aquestes àrees, encara queden molts reptes tecnològics per assolir, que s’expliquen de manera resumida en aquest apartat.
En l’àmbit de la robòtica, hi ha dos enfocaments clarament diferenciats. El més clàssic té per finalitat la construcció de robots molt versàtils, que poden portar a terme moltes tasques, però que, per altra banda, manquen d’autonomia pel seu elevat cost energètic. L’enfocament més actual es basa en la construcció de robots que tenen un cost energètic molt semblant al de la marxa de les persones (limit cycle walkers), cosa que n’afavoreix l’autonomia, però que, per contra, ofereixen molt poca versatilitat; de fet, només estan preparats per caminar. Un repte molt important és el disseny i desenvolupament de robots que combinin els dos enfocaments, és a dir, que tinguin un control adaptatiu a la tasca que desenvolupa el robot. Així, per exemple, en el moviment de marxa només caldria garantir una estabilitat orbital o cíclica (fet que disminueix el cost energètic); mentre que si el robot està dret i immòbil, l’estabilitat que s’ha de garantir és local. En resum, el que s’ha vist és que s’ha d’assolir un compromís entre autonomia energètica i versatilitat; en general, molta versatilitat està lligada a manca d’autonomia, i viceversa. Desenvolupar robots amb molta autonomia de bateries i estables és l’objectiu final que han de tenir els dissenyadors de robots. En el terreny de l’enginyeria de rehabilitació, cada vegada hi ha més recerca en neurorobòtica: la ciència que estudia la interacció entre el sistema nerviós central i els sistemes robòtics d’assistència. Tanmateix, el disseny de la majoria de dispositius ortètics encara es realitza a partir d’unes especificacions donades, i el seu control s’ajusta per prova i error fent tests sobre el mateix pacient. El
gran repte és desenvolupar eines informàtiques que permetin simular de manera virtual la dinàmica d’interacció entre l’ortesi dissenyada i el pacient. D’aquesta manera, milloraria la qualitat de vida de la persona, ja que no se l’hauria de molestar tantes vegades, i s’estalviaria temps tant a metges i enginyers com al mateix pacient. Aquestes eines permetrien, a més, assajar diferents estratègies de control dels dispositius i els seus efectes sobre el moviment del pacient. Un altre repte molt important és desenvolupar dispositius d’assistència que siguin còmodes i ergonòmics i que garanteixin un cost metabòlic baix al pacient.
Conclusions
En aquest article s’ha presentat l’estat de la qüestió en dos àmbits tecnològics relacionats amb la biomecànica de la marxa humana: la robòtica humanoide i l’enginyeria de la rehabilitació. En el camp de la robòtica, s’han analitzat qualitativament els avantatges i els inconvenients dels dos enfocaments presents actualment: el dels robots versàtils basats en un criteri de controlabilitat total i el dels robots que tenen com a punt de partida el passive dynamic walking i que es basen en criteris d’estabilitat orbital. S’han presentat també conceptes cinemàtics, dinàmics i de control associats als dos tipus de marxa. Els robots humanoides del futur s’han de dissenyar incorporant els avantatges d’un enfocament i de l’altre per obtenir, d’aquesta manera, robots versàtils, d’elevada autonomia i que imitin el moviment real de les persones.
Pel que fa als dispositius d’assistència i rehabilitació, se citen alguns dels treballs que utilitzen la dinàmica de sistemes multisòlid (multibody system dynamics) per a l’anàlisi dinàmica de la marxa humana, així com l’estat de la qüestió en els dispositius ortètics per a les extremitats inferiors. En aquest cas, els reptes de futur més importants són la modelització i l’estudi de la interacció del control neuromotor del pacient amb el control artificial (electromecànic) del dispositiu, així com el disseny d’ortesis i exosquelets confortables, ergonòmics i que garanteixin un cost metabòlic del moviment assumible per al pacient. L’assoliment d’aquests reptes requereix equips interdisciplinaris, ja que hi han de conviure professionals de l’àmbit de la salut (metges, ortopedistes, etc.) amb professionals de l’àmbit tecnològic (enginyers mecànics, robòtics, de control, electrònics, biomèdics, informàtics, etc.). ■
Bibliografia
Ackermann, M.; Schiehlen, W. «Dynamic analysis of human gait disorder and metabolical cost estimation». Archive of Applied Mechanics, vol. 75 (2006), p. 569-594.
Ambrosio, J.; Kecskemethy, A. «Multibody dynamics of biomechanical models for human motion via optimization». A: García orden, J. C.; Goicolea, J. M.; Cuadrado, J.
37 robo TS H um A noide S i T ecno L o G i A per ASS i ST ir LA m A r XA H um A n A
[ed.]. Multibody dynamics computacional methods and applications. Springer, 2007.
Anderson, F.; Pandy, M. «Static and dynamic optimization solutions for gait are practically equivalent». Journal of Biomechanics, vol. 34 (2001), p. 153-161.
Blaya, J. A.; Herr, H. «Adaptive control of a variable-impedance ankle-foot orthosis to assist drop-foot gait». IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 12 (2004), p. 24-31.
Collins, S. H. [et al.]. «Efficient bipedal robots based on passive-dynamic walkers». S cience , vol. 307 (2005), p. 1082-1085.
Collins, S. H.; Wisse, M.; Ruina, A. «A three-dimensional passive-dynamic walking robot with two legs and knees». International Journal of Robotics Research, vol. 20, núm. 7 (2001), p. 607-615.
Colombo, G.; Jorg, M.; Dietz, V. «Driven gait orthosis to do locomotor training of paraplegic patients». A: 22nd Annual International Conference of the IEEE-EMBS. Chicago, Ill., 2000.
Dollar, A. M.; Herr, H. «Lower extremity exoskeletons and active orthoses: Challenges and state-of-the-art».
IEEE Transactions on Robotics, vol. 24, núm. 1 (2008), p. 144-158.
Donelan, J. M.; Kram, R.; Kuo, A. D. «Mechanical work for step-to-step transitions is a major determinant of the metabolic cost of human walking». Journal of Experimental Biology, vol. 205 (desembre 2002), p. 3717-3727.
Filippi, P. «Device for the automatic control of the articulation of the knee applicable to a prosthesis of the thigh». U.S. Patent 2 305 291, 1942.
Font-Llagunes, J. M. Passive dynamic walking: State-of-the-art. Informe tècnic. Mont-real: McGill University. Centre for Intelligent Machines, 2008.
Font-Llagunes, J. M.; Kövecses, J. «Dynamics and energetics of a class of bipedal walking systems». Mechanism and Machine Theory, vol. 44, núm. 11 (2009), p. 1999-2019.
Hirai, K. [et al.]. «The development of Honda humanoid robot». A: Proceedings of the IEEE International Conference on Robotics and Automation. Lovaina, 1998, p. 1321-1326.
Hobbelen, D. Limit cycle walking. Tesi doctoral. Delft: Technische Universiteit Delft, 2008.
Ishida, T. «Development of a small biped entertainment robot QRIO». A: Proceedings of the International Symposium on Micro-Nano Mechatronics and Human Science. Nagoya, 2004, p. 23-28.
Kawamoto, H.; Kanbe, S.; Sankai, Y. «Power assist method for HAL-3 estimating operator’s intention based on motion information». A: Proceedings of IEEE Workshop on Robot and Human Interactive Communication. Millbrae, Calif., 2003, p. 67-72.
Kawamoto, H.; Sankai, Y. «Power assist system HAL-3 for gait disorder person». A: Proceedings of ICCHP. Linz, 2002.
Kuo, A. D. «A simple model of bipedal walking predicts the preferred speed-step length relationship». Journal of Biomechanical Engineering, vol. 123 (2001), p. 264-269.
«Energetics of actively powered locomotion using the simplest walking model». Journal of Biomechanical Engineering, vol. 124 (2002), p. 113-120.
«Choosing your steps carefully: Trade-offs between economy and versatility in dynamic walking bipedal robots». IEEE Robotics and Automation Magazine, vol. 14 (juny 2007), p. 18-29.
Kuo, A. D.; Donelan, J. M.; Ruina, A. «Energetic consequences of walking like an inverted pendulum: Step-to-step transitions». Exercise and Sport Sciences Review, vol. 33, núm. 2 (2005), p. 88-97.
McGeer, T. «Passive dynamic walking». International Journal of Robotics Research, vol. 9, núm. 2 (1990), p. 62-82.
Pratt, J. [et al.]. «The RoboKnee: An exoskeleton for enhancing strength and endurance during walking». A: Proceedings of IEEE International Conference on Robotics and Automation. Nova Orleans, La., 2004.
Rodrigo, S. E. [et al.]. «Analysis of human gait based on multibody formulations and optimization tools». Mechanics Based Design of Structures and Machines, vol. 36 (2008), p. 446-477.
Tedrake, R.; Zhang, T. W.; Seung, H. S. «Stochastic policy gradient reinforcement learning on a simple 3D biped». A: Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS). Vol. 3. Sendai, 2004, p. 2849-2854.
Tsirakos, D.; Baltzopoulos, V.; Barlett, R. «Inverse optimization: Functional and physiological considerations related to the force-sharing problem». Critical Reviews in Biomedical Engineering, vol. 25 (1997), p. 371-407.
Vukobratovic, M.; Borovac, B. «Zero-moment point: thirty five years of its life». International Journal of Humanoid Robotics, vol. 1, núm. 1 (2004), p. 157-173.
Vukobratovic, M.; Ciric, V.; Hristic, D. «Contribution to the study of active exoskeletons». A: Proceedings of the 5th IFAC Congress. París, 1972.
Vukobratovic, M.; Frank, A. A.; Juricic, D. «On the stability of biped locomotion». IEEE Transactions on Biomedical Engineering, vol. 17, núm. 1 (1970), p. 25-36.
Vukobratovic, M.; Hristic, D.; Stojiljkovic, Z. «Development of active anthropomorphic exoskeletons». Medical & Biological Engineering & Computing, vol. 12 (1974), p. 66-80.
Winter, D. A. Biomechanics and motor control of human movement Hoboken, N. J.: John Wiley & Sons, 2005.
Winters, J. Concepts in neuromuscular modeling: Three-dimensional analysis of human movement. Champaign, Ill., Human Kinetics Publishers, 1995.
Yakimovich, T.; Lemaire, E. D.; Kofman, J. «Preliminary kinematic evaluation of a new stance-control knee-anklefoot orthosis». Clinical Biomechanics, vol. 21 (2006), p. 1081-1089.
38 j o S ep mA ri A f on T -L LAG une S
la tecnologia avui
educació tecnològica
AULATEC: ALGUNES ACCIONS p ER MILLORAR L ’ ACCI ó EDUCATI v A
DE L ’ ÀREA DE TECNOLOGIA A SECUNDÀRIA
Joan Busquets i t endero, Pere g arcia i Janeras i Jordi Regalés i Barta
Equip del CESIRE AULATEC. Departament d’Ensenyament. Generalitat de Catalunya
Introducció
El centre específic de suport a la recerca i la innovació (CESIRE) Aula de Recursos de Tecnologia (AULATEC) és una eina del Departament d’Ensenyament de la Generalitat de Catalunya al servei dels docents de l’àrea de tecnologia. Treballa per tal de compartir informacions i inquietuds, coordinant l’actuació conjunta a l’hora de potenciar i iniciar noves línies d’acció i dinamització i aportant i promovent la generació de recursos.
Fomenta iniciatives que estiguin al servei de la millora de l’ensenyament i l’aprenentatge d’acord, especialment, amb les necessitats del professorat i dels departaments de tecnologia dels instituts d’educació secundària de Catalunya, afavorint les relacions entre la recerca i el sistema educatiu, copsant les innovacions en l’educació tecnològica que contribueixin a un millor assoliment de les competències bàsiques de l’alumnat i contribuint a l’excel·lència en el sistema educatiu.
objectius
Els docents són els mediadors en l’acte educatiu i els nostres objectius són:
Mantenir el contacte amb el professorat i l’alumnat en les activitats de presentació d’experiències en l’àmbit de Catalunya i en qualsevol esdeveniment que fomenti l’interès per la cultura tecnològica. Aconseguir que el professorat millori a partir dels processos de formació, innovant i millorant la seva actuació com a mediadors i acompanyants en l’educació dels nois i noies, per tal que aconsegueixin les competències pròpies de la matèria, i generar les vocacions necessàries per continuar la seva formació en estudis de caràcter tecnocientífic.
Donar assessorament i formació al professorat, ja que si és conscient de la necessitat de la recerca i la innovació contínua en el camp tècnic i en l’educatiu, pot millorar clarament la seva pràctica docent.
Fer present l’educació en tecnologia a la societat a través de les empreses, institucions i organismes que estan relacionats directament i indirecta amb el fet
tecnològic, de manera que, de la relació mútua, se’n derivin actuacions que fomentin la cultura i les vocacions envers els estudis i les professions tecnològics.
Per a la formació del professorat de tecnologia, el CESIRE AULATEC realitza accions des del curs 2003-2004, amb una acceptació notable per part dels participants i les entitats col·laboradores.
Activitats
El CESIRE AULATEC vol ser una plataforma eficaç, mitjançant la formació permanent i altres estratègies que es considerin adequades, per aconseguir la transferència i la implementació de les conclusions de la recerca i la innovació educativa a la docència de la tecnologia.
Visites tècniques a llocs d’especial interès tecnològic, per a la formació del professorat i per facilitar les visites posteriors amb alumnes.
Sessions de presentació d’activitats o de material didàctic i de treball amb professors o amb professors i alumnes.
Organització periòdica de jornades de tecnologia.
Organització periòdica del MERCATEC, en collaboració amb l’Institut de Tecnoètica.
Col·laboració amb la Societat Catalana de Tecnologia (SCT), el Col·legi d’Enginyers Tècnics Industrials de Barcelona (CETIB) i l’Associació del Professorat de Tecnologia de Catalunya (APTC).
Algunes de les activitats fetes el curs 2008-2009: Grimaldi Lines i el Museu Marítim de Barcelona Tema: entorn del mar, els nous creuers com a recurs pedagògic.
La sessió va permetre als docents de primària i de secundària i als tècnics de serveis educatius conèixer i informar-se del programa educatiu i de les visites que ofereix la companyia Grimaldi Lines amb la col·laboració del Museu Marítim de Barcelona, que converteixen una instal·lació eminentment tècnica com un vaixell d’última tecnologia (construït el 2008) en un instrument d’aprenentatge amb infinitat de possibilitats docents.
39 R evista de T ecnologia , núm. 4 (2011), p. 39-42 • ISSN (ed. impresa): 1698-2045 • ISSN (ed. electrònica): 2013-9861 • http://revistes.iec.cat/index.php/ RTEC
La proposta engloba en un sol paquet el món de la navegació més avançada i l’educació en conceptes bàsics de física i tecnologia que fan possible el transport marítim. Per tant, es tracta d’una proposta innovadora que, des del punt de vista del docent, ofereix una nova possibilitat d’aprenentatge basada en l’observació i un valor social i educatiu.
Els creuers on es realitza aquesta activitat són la motonau Cruise Barcelona i la Cruise Roma. Les seves característiques són: eslora de 225 m, mànega de 30,40 m i velocitat màxima de 28 nusos, amb una capacitat de 2.300 passatgers, dels quals 478 en cabina, i de càrrega de 215 automòbils i 3.000 m lineals per a camions. Un cop visitada la motonau, es continua l’activitat al Museu Marítim de Barcelona, per veure la història del transport marítim, les naus, etc. Disposen d’un dossier informatiu per al professorat amb propostes de treball per realitzar a l’aula. Per organitzar les visites, les escoles interessades han de contactar amb el Museu Marítim. Trobareu tota la informació a http://www.xtec. cat/aulatec/informesvisites/2009/infogrimaldi09.html
Escola Universitària. Centre de Recerca de Canet de Mar Tema: una tecnologia que ens toca la pell.
El Centre de Recerca disposa d’un departament de difusió que organitza visites i tallers didàctics per mostrar, a través de l’experimentació, un procés industrial proper i viu i per desvetllar la curiositat. També es presenten aplicacions innovadores per fomentar vocacions tecnològiques.
Estan estructurats en quatre tallers didàctics i un audiovisual, perquè els estudiants, de manera pràctica, comprovin què és un procés industrial real i viu i per tocar i experimentar en totes les seves fases.
En el desenvolupament de l’oferta didàctica, els alumnes descobreixen la interrelació i la confluència de les diferents tecnologies en el procés industrial. Veuen màquines reals en ple funcionament treballant per a la producció de productes i descobreixen la utilitat dels sistemes de control, d’automatització i de seguretat.
Els tallers, amb una durada de dues hores, estan pensats per a grups de vuit a catorze estudiants. La sessió està estructurada en quatre tallers:


Taller de disseny i aplicació de les tecnologies de la informació i la comunicació (TIC). S’experimenta el procés De la idea al producte segons el seu ús comercial i després s’apliquen les TIC per produir un prototipus. En concret, es comprova com un dibuix, una fotografia o un text tractat en un ordinador pot esdevenir un teixit.
Taller d’obtenció de matèries. A partir del concepte matèria primera, s’aplica el procés industrial de la fabricació de fils, s’observa en viu el procés de filatura i es mostra la importància del disseny i la interrelació amb altres indústries com la química o l’electromecànica.
Taller de transformació en producte elaborat. A partir de maquinària complexa que usa tecnologies com l’electricitat, l’electrònica, la pneumàtica, la hidràulica i sistemes de control i de seguretat, s’experimenta el procés de fabricació de teixits per a l’obtenció de geotèxtils, peces d’ús mèdic o d’indumentària.
Taller de comercialització i consum responsable. Permet conèixer la pròpia talla i diferenciar-la de la talla comercial, punt de partida per a l’elaboració de patrons; experimentar el procés de disseny i fabricació d’una peça de vestir, i mostrar la interrelació amb el coneixement del propi cos i conceptes com la salut.
Per organitzar les visites, les escoles interessades han de contactar amb Òscar Figuerola ( figuerola@diba.cat ). Trobareu tota la informació a http://www.xtec.cat/aulatec/ informesvisites/2009/infocanet09.html
El Museu del Coure. Les Masies de Voltregà. Tema: el coure, un conductor de la història.
40 j o A n b u S que TS i Tendero, p ere G A rci A i jA ner AS i j ordi r e GAL é S i bA r TA
Fotografia 1. Al pont de comandament del ferri de Grimaldi Lines.
educació tecnològica
Fotografia 2. Sortint de la visita al ferri de Grimaldi Lines.



La visita té per objectiu donar a conèixer el programa educatiu i els recursos pedagògics que ofereix aquest museu. El coure és un dels pocs materials que es pot reciclar una vegada i una altra, indefinidament, de manera que de la ferralla de coure, se’n pot recuperar pràcticament tot el metall sense pèrdua de les seves qualitats: d’un collaret de coure del Neolític es pot obtenir el coure per a una pista conductora d’un ordinador d’última generació. El museu és emplaçat en una antiga torre de principi del segle xx, que es troba al costat de les instal·lacions industrials de l’empresa La Farga Group, i està dividit en quatre àrees:
Àrea 1. La Farga, història d’una empresa. La Farga treballa aquest metall des del 1808 i avui continua essent un material essencial per a la societat.
Àrea 2. El coure i els orígens de la metal·lúrgia. El descobriment del coure, els orígens de la metal·lúrgia i la rellevància del coure des dels inicis fins a la industrialització.
Àrea 3. L’element químic coure. El coure des del punt de vista científic, amb les seves propietats físiques i químiques.
Àrea 4. Tecnologia i aplicacions del coure. Processos industrials d’obtenció, d’elaboració i de purificació del coure. Mostra d’objectes de coure, de bronze i de llautó de la societat industrial. El seu futur.
Visita a la fàbrica. Després de visitar el museu, a través d’una passarel·la es visita la fàbrica, on es pot veure en viu i en directe el procés metal·lúrgic del coure.
Per organitzar les visites, les escoles interessades han de contactar amb el museu a través de la pàgina http://www. museudelcoure.com/index_cat.php?cont=08_cat.php
El Tibidabo (grup B:SM Barcelona de Serveis Municipals) Tema: ciència i tecnologia. A l’entorn del Tibidabo.
Es tracta d’una sessió amb places limitades per als docents de tecnologia interessats a conèixer i informar-se del programa educatiu que ofereix el Parc d’Atraccions, que converteix una instal·lació eminentment lúdica en una altra d’experimentació tecnològica.
És una proposta que engloba en un sol paquet el món de l’educació i el de l’oci, atenent al fet que hi ha una part del currículum actual de l’educació secundària obligatòria (ESO) i del batxillerat que conté conceptes tecnològics i científics i que pot ser desenvolupada al Tibidabo.
El Parc d’Atraccions del Tibidabo disposa d’installacions que permeten enfocar l’ensenyament des d’una nova dimensió: l’experimentació i la presa de dades a la mateixa atracció.
Per tant, es tracta d’una proposta innovadora que, des del punt de vista del docent, ofereix una nova possibilitat d’aprenentatge basada en la diversió i, des del punt de vista del Parc d’Atraccions del Tibidabo, confereix un valor social i educatiu a aquest espai.
Mitjançant l’experimentació amb l’Avió, la Talaia o el Pèndol, entre d’altres, es prendran dades reals sobre l’energia cinètica i potencial, l’acceleració, el càlcul d’alguns mecanismes i altres principis tecnològics. L’activitat està dissenyada i coordinada per Lluís Ribas, professor de tecnologia que també és el conservador del Museu d’Autòmats del Tibidabo.
Com funciona:
Tots els alumnes van en grup amb el seu professor/ ra i acompanyats pel tècnic-guia del Parc.
Fan un recorregut establert per l’organització, tot posant en marxa les atraccions i pujant-hi.
Es prenen dades i s’obtenen conclusions que s’apunten al dossier de seguiment, lliurat pel Parc.
41 A u LAT ec : ALG une S A ccion S per mi LL or A r L A cció educ AT iv A de L À re A de T ecno L o G i A A S ecund À ri A
Fotografia 3. Visita a l’Escola Universitària d’Enginyeria Tècnica en Teixits de Punt.
Fotografia 4. Visita a l’exposició «Els grans viatges de Zheng He».
Fotografia 5. Visita al Museu del Coure.


Aquest procediment no inclou la possibilitat que els alumnes vagin per lliure.
Les activitats estan absolutament relacionades amb els currículums dels diferents nivells. Per organitzar les visites, les escoles interessades han de contactar amb el Parc d’Atraccions a través de la pàgina web http://www.tibidabo.es/
Trobareu informació detallada de les visites del curs 2008-2009 (contingut, objectius i informació gràfica) a http://www.xtec.cat/aulatec/informesvisites/ 2009/infoactivitats2009 html. També trobareu informació de les activitats fetes els anys anteriors a http://www.xtec.cat/aulatec/activitats200708 html ■
42 j o A n b u S que TS i Tendero, p ere G A rci A i jA ner AS i j ordi r e GAL é S i bA r TA
Fotografia 6. Visita al Tibidabo.
educació tecnològica
Fotografia 7. Experimentant al Tibidabo.
S EGONES J ORNADES SO b RE INNO v ACI
ó
A L ’ ENSEN y AMENT DE LA TECNOLOGIA : ELS RE p TES DELS NOUS RECURSOS
Ramon Izquierdo
Societat Catalana de Tecnologia. Institut d’Estudis Catalans
Les jornades es van celebrar a Terrassa els dies 7 i 8 de maig del 2010 al Museu de la Ciència i de la Tècnica de Catalunya (mNACTEC) i el fil conductor en van ser els reptes dels nous recursos, amb els objectius següents:
Presentar el nou projecte eduCAT1×1 i les oportunitats que ofereix. El projecte eduCAT1×1 és la concreció catalana del projecte Escuela 2.0 del Ministeri d’Educació, amb l’objectiu d’aconseguir la integració de les tecnologies de la informació i de la comunicació (TIC) en els centres educatius.
Reflexionar sobre la didàctica de la tecnologia en el marc de les competències i la digitalització a les aules.
Fer una aproximació i una anàlisi de les noves eines i recursos per a l’aprenentatge de la tecnologia i el paper que poden tenir en el foment de vocacions per les ciències, la tecnologia i les matemàtiques.
Rebre i valorar informació dels recursos actuals per seguir innovant en l’educació tecnològica per part d’altres professionals, els museus, les editorials i les empreses.
Reflexionar sobre les novetats en l’educació tecnològica i els desafiaments de la societat. Presentar exemples d’aplicació del projecte eduCAT1x1.
Estimular el diàleg professional entre docents.
Contribuir a la formació del professorat.
Obrir canals de diàleg entre l’Administració educativa, el professorat de tecnologia, els tècnics experts, les empreses i les institucions implicades en l’educació tecnològica.
Van obrir les jornades les paraules de Lluís Plaza, administrador de l’mNACTEC; Jordi Sabaté, subdirector general de Formació i Desenvolupament del Personal Docent, i Josep Pàmies, regidor d’Educació de l’Ajuntament de Terrassa, en representació de l’alcalde de la ciutat.
A continuació, van fer la presentació de les jornades David Medina, cap del Servei d’Innovació i Recerca Educativa; Jordi Orts, president de l’Associació del Professorat de Tecnologia de Catalunya (APTC), i Joan Busquets i Jordi Regalés, del centre específic de suport a la recerca i la innovació (CESIRE) Aula de Recursos de Tecnologia (AULATEC).

Tot seguit, van intervenir Xavier Kirchner, director del Programa d’Innovació en Metodologies per a l’Aprenentatge i l’Ensenyament de Talència, i David Medina, cap del Servei d’Innovació i Recerca Educativa, per parlar del projecte eduCAT1×1 del Departament d’Educació, i Xavier Carrera, professor titular de la Universitat de Lleida, va pronunciar una conferència sobre «La didàctica de la tecnologia en el marc de la digitació a les aules».
Altres activitats de la primera jornada van ser les següents:
Professors de diferents centres van exposar les seves experiències en l’aplicació a l’aula dels ordinadors.
Presentació de l’acció educativa de l’mNACTEC.
Per grups, els participants van poder assistir a dos dels cinc tallers que es poden fer durant les visites amb alumnes: «Terrassa al sol», «Taller del so», «Taller Mentora Alsina», «Taller d’engranatges» i «Taller d’electricitat i magnetisme».
Presentació de recursos educatius per part de les empreses següents: Endesa Educa, McGraw-Hill, Establiments Viena, Teide Digital, Gas Natural Fenosa, Digital-Text, CEBEK-Fadisel, Oxford Paper Show, Moway MiniRobots, Llibreweb Santillana, Editorial Cruïlla i Festo Pneumatic.
Visita lliure als expositors de recursos educatius.
El 8 de maig, la segona jornada, es va començar treballant en tallers, a primera hora, amb el tema «Escoltem les veus dels professionals docents». Els participants van escollir-ne un entre els següents:
43 R evista de T ecnologia
núm. 4
p. 43-44 •
•
electrònica): 2013-9861 • http://revistes.iec.cat/index.php/ RTEC
,
(2011),
ISSN (ed. impresa): 1698-2045
ISSN (ed.
educació tecnològica

1. Participants en la taula rodona «Nous recursos, més vocacions tecnològiques? La visió de la societat». D’esquerra a dreta, Xavier Villasevil, Dani Jiménez, Imma Torra, Lluís Jofre i Josep M. Fuertes.
Com treballar amb els nous recursos.
Internet, la web 2.0 i les xarxes socials com a recursos didàctics per a la tecnologia.
És necessària la formació del professorat per a l’aplicació dels nous recursos.
Els nous recursos incentiven les vocacions tecnològiques.
El nou rol del professorat.
I a continuació, es va desenvolupar una segona tanda de tallers, amb el tema «Tallers de formació amb nous recursos». En aquest cas, les opcions eren:
Energia eòlica.
Aprofitament energètic i energies renovables.
Robòtica.
Aprofitament de l’energia de l’hidrogen.
Aplicació de la pissarra digital a l’aula de tecnologia.

Programació amb Scratch. Control amb Arduino. Les darreres activitats del matí van ser les següents: Una taula rodona amb el títol «Nous recursos, més vocacions tecnològiques? La visió de la societat», en la qual van participar, presentats per Dani Jiménez, Lluís Jofre, director d’Enginycat; Imma Torra, directora de l’Institut de Ciències de l’Educació de la Universitat Politècnica de Catalunya; Josep M. Fuertes, president de la Societat Catalana de Tecnologia, i Xavier Villasevil, president de la Comissió d’Ensenyament del Col·legi d’Enginyers Tècnics Industrials de Barcelona.
L’espectacle Noves tecnologies... Noves dinàmiques de classe?, a càrrec de Dani Jiménez.
I la cloenda de l’acte, per Esther Font, de l’mNACTEC; Joan Busquets, del CESIRE AULATEC; Jordi Orts, de l’APTC, i Josep Pàmies, regidor d’Educació de l’Ajuntament de Terrassa. ■
44 rA mon izquierdo
Fotografia 2. Taller d’energia eòlica.
educació tecnològica
Fotografia
Entr E v ista a Joan v a llvé
Josep Amat
Departament d’Enginyeria de Sistemes, Automàtica i Informàtica Industrial. Universitat Politècnica de Catalunya
Membre de l’Institut d’Estudis Catalans

Joan Vallvé és un enginyer industrial de carrera professional molt prolífica: ha estat enginyer al Departament d’Indústria, conseller de la Generalitat i actualment és degà del Col·legi d’Enginyers Industrials de Catalunya. Té, per tant, una visió molt àmplia de l’estat de l’enginyeria al nostre país, una professió amb més de cent cinquanta anys d’història que ha estat molt vinculada al nostre desenvolupament industrial, i que ara s’haurà d’adaptar a la renovació que suposa l’establiment d’un espai universitari europeu. Per tot això, volem saber la seva opinió sobre l’estat actual i el futur de l’enginyeria.
Quina és la història de la institució que presideix?
Els estudis dels enginyers industrials a Catalunya varen començar a l’Escola d’Enginyeria Industrial, a Barcelona, el curs 1850-1851. Uns quants anys més tard, el 1863, en acabar els estudis, els enginyers de la primera promoció varen decidir constituir la primera Associació d’Enginyers Industrials, que inicialment es va dir de Barcelona, però posteriorment es va passar a dir de Catalunya. Els seus objectius bàsics eren millorar la formació dels enginyers per poder exercir millor la professió i oferir-se a les diferents autoritats per
poder aportar els seus coneixements o l’opinió tècnica a una societat que s’estava tecnificant. El Col·legi d’Enginyers, l’entitat que tinc l’honor de presidir, com a degà, es va crear molts anys després, el 1950, després de l’aprovació de la Llei de col·legis professionals. A diferència de les altres associacions d’enginyers industrials d’Espanya, que varen integrar les associacions als col·legis que s’havien creat, aquí a Catalunya es varen mantenir les dues associacions: el Col·legi, com a corporació de dret públic, i l’Associació, com a corporació de dret civil. Ambdues han seguit treballant coordinadament fins ara.
El procés de la revolució industrial a Catalunya va ser un fet molt notable. Els enginyers industrials en varen ser els impulsors? O la revolució industrial va impulsar el creixement de l’Escola d’Enginyeria de Barcelona?
El procés de la revolució industrial a Catalunya, com tots ja sabem, va començar a finals del segle xviii D'aquesta revolució industrial, en vàrem ser força pioners; de fet, al sud d’Europa sols es va dur a terme realment a Catalunya i d’alguna manera al Piemont i a la Llombardia, sota la influència de l’Imperi austríac. En el cas de Catalunya, aquesta revolució industrial es va fer amb els petits estalvis del comerç, com el del vi, que varen servir per començar a industrialitzar el país. Aquesta incipient industrialització feta a base de petits tallers va necessitar tècnics que poguessin aportar els coneixements necessaris per tal de poder crear el desenvolupament d’aquesta industrialització. I varen ser els mateixos gremis i associacions de constructors i fabricants els que varen decidir impulsar la creació d’una Escola d’Enginyeria Industrial a Catalunya el 1850. L’escola de Barcelona va ser la primera de tot l’Estat. En l’àmbit europeu, ja s’havien creat escoles a països com Alemanya i França, que tenia un Estat que ja havia creat també escoles com la de Mines o la de Camins, i ja entrat el segle xix, l’Escola Politècnica. Aquí va ser diferent: primer va ser la industrialització i després els enginyers varen donar un impuls a aquest procés d’industrialització. Els primers anys, els nostres estudis eren pràcticament de mecànica i de química, ja que l’electricitat
• ISSN (ed. electrònica): 2013-9861
• ISSN (ed. impresa): 1698-2045
evista de T ecnologia , núm. 4 (2011), p. 45-47
45 R
• http://revistes.iec.cat/index.php/ RTEC
entrevista
era una cosa encara de laboratori, i va ser més tard que aquests estudis es varen incorporar a l’Escola d’Enginyeria. Així doncs, tot el procés de gasificació, primer, i el d’electrificació, ja ben entrat el segle xx, els van tirar endavant i els van desenvolupar els tècnics. Ja més endavant, aquests mateixos enginyers industrials són els que participen en la creació de les primeres telecomunicacions, la telefonia i després la radiodifusió. Recordem que la primera ràdio de l’Estat va ser Ràdio Barcelona i els primers telèfons automàtics de la Península es varen installar a Balaguer, per la Mancomunitat de Catalunya. Jo crec que el paper dels enginyers industrials va ser fonamental en tot el procés de industrialització del país.
Al llarg d’aquests més de cent cinquanta anys d’història de les escoles d’enginyeria industrial a Catalunya, hem tingut destacats professors que no només han estat excel·lents enginyers, excel·lents especialistes, sinó que també han estat científics molt reconeguts. Aquesta simbiosi entre un científic i un enginyer està també en l’esperit de l’enginyeria actual?
Jo crec que aquí hi ha hagut dos fets. Un fet és que l’Escola estava enfocada al món de l’empresa, al món de la societat civil, a diferència del que podia ser el cas de França o de Madrid, en què en recerca ja es comptava amb centres específics i l’enginyeria estava també orientada a l’enginyeria militar i a l’obra civil pública. Per tant, aquella persona que a Catalunya tenia una vocació científica trobava d’alguna manera a l’Escola d’Enginyeria Industrial, que era l’única d’enginyeria que hi havia a casa nostra, la possibilitat de desenvolupar-se. I si la seva vocació era també més matemàtica o més física, era molt possible que també això ho pogués desenvolupar a través d’aquesta Escola d’Enginyeria. Per tant, en aquest sentit, jo crec que és una coincidència que va donar lloc a què dins de la nostra escola sorgissin grans personalitats també al camp de la ciència.
Sobre si avui es dóna també aquest mateix fet, jo crec que la carrera d’enginyer ha anat evolucionant en els darrers anys, però és evident que l’enginyeria no s’orienta només a la producció, o la construcció de nous elements de producció, sinó que també es dedica a millorar, a innovar i a crear nous sistemes, i això fa que l’enginyer pugui trobar també un espai per poder exercir la seva vocació més científica. No cal que esdevingui un científic pur, sinó que un enginyer també trobarà un camí on pugui aplicar la seva vocació científica.
Actualment, com interaccionen el Col·legi i l’Associació d’enginyers Industrials amb la professió?
Jo crec que tenim dues vessants: d’una part, el Col·legi, com a institució de dret públic, que, per delegació de l’Administració, fa una sèrie de funcions, com poden ser el certificat o el visat de projectes, i, d’altra banda, hi ha tot un altre
àmbit, que és l’Associació. L’enginyer s’associa, primer de tot, per millorar o per actualitzar els seus coneixements, per assolir una formació continuada; la formació al llarg de tota la vida és la que li permet adequar-se a les noves realitats. D’altra banda, l’Associació li ofereix també tota la informació i documentació tècnica que pugui necessitar, i disposa de la borsa de treball. L’Associació, per realitzar les seves tasques, està constituïda per un conjunt de comissions sobre matèries específiques, com ara energia, medi ambient, packaging, mobilitat, TIC... Estar associat permet trobar-se amb altres companys i pot servir per estar al dia en aquestes matèries i per donar a la societat la seva opinió. Aquella opinió que els fundadors varen voler donar a la societat i a les autoritats, avui dia, més que mai és necessària. Jo només voldria recordar que en aquests últims anys hem donat un informe demanat per la Generalitat per l’apagada del 23 de juliol del 2007, o posteriorment i sobre el mateix problema de l’electricitat, un altre informe sobre els efectes de la nevada del març del 2010. I últimament, també, un informe sobre l’accident en una atracció del Tibidabo i sobre l’estat de la resta d’atraccions. Hem opinat sobre el tema de l’escassetat d’aigua a Barcelona i sobre la línia elèctrica de molt alta tensió entre Bescanó i Santa Llogaia d’Àlguema. Tot això és un conjunt d’opinions que el col·lectiu dels enginyers pot donar a la societat, i el pot donar des d’un punt de vista no implicat en cap opció política, sinó des d’un punt de vista estrictament tècnic. Després, la decisió sobre el que es cregui més convenient correspondrà als polítics, però, en tot cas, jo crec que l’opinió dels tècnics és necessària, sobretot en una societat absolutament tecnificada com la que estem vivint.
No ens adonem que des que ens llevem i encenem el llum, ens dutxem amb aigua calenta, tenim aigua corrent, agafem l’ascensor, el transport públic... Tot això són elements en què els enginyers han participat, en el projecte i en la construcció, i estan participant encara en el seu manteniment. Per tant, depenem molt dels tècnics, i crec que és bo que la societat en sigui conscient, i podem aportar la nostra opinió sobre aquests aspectes que tant ens incumbeixen.
La recent reforma del sistema d’ensenyament universitari, per adaptar-se a l’espai europeu unificat, ha representat l’aparició d’un gran nombre de noves titulacions entorn de l’enginyeria industrial. Això com afecta un Col·legi i una Associació que tenen per nom el d’Enginyers Industrials?
Això els afecta d’una manera important, al meu entendre, perquè vol dir que amb el nou marc legal, que es coneix com el Pla Bolonya, cada universitat pot establir aquelles titulacions que cregui més adequades, titulacions per a les quals un organisme oficial, ja sigui en l’àmbit estatal o català, sols haurà de certificar que aquella institució té la capacitat d’impartir-les. Això ja s’ha implantat aquest curs 2010-2011, la qual cosa vol dir que d’aquí a quatre anys
46 j o S ep A m AT
entrevista
tindrem un gran nombre de noves titulacions. En aquests moments, el nombre de graus, que és l’equivalent a l’antic títol universitari d’enginyer tècnic, que ja han estat aprovats és de quaranta-un. I pel que fa a màsters, que és l’equivalent a l’antic títol universitari d’enginyer superior, n’hi ha cent vuitanta-dos d’aprovats i publicats, referits a l’arquitectura o l’enginyeria. Això vol dir que hi ha quantitats importants de noves titulacions.
De quina manera aquests nous titulats s’agruparan per exercir millor la seva professió? Això és claríssim: serà necessari que els actuals col·legis i associacions s’obrin i integrin altres col·lectius que puguin estar en el mateix àmbit de la tecnologia, ja que totes les activitats que els actuals col·legis i associacions porten a terme poden fer-se en una mateixa institució.
Per part nostra, els enginyers industrials de Catalunya, fa dos anys, vàrem fer un pas en incorporar a la nostra institució els enginyers químics, els enginyers geòlegs i els enginyers d’organització industrial, que no tenien un collegi, perquè entenem que són professions que estan dins de l’àmbit de la indústria. Nosaltres ens reforcem amb la seva incorporació, i ells troben un lloc on es reconeix la seva titulació.
Això, evidentment, va obligar a fer un canvi en els estatuts. Aquest canvi va ser acceptat per tot el col·lectiu?
Això va obligar a reformar els Estatuts, reforma que va ser aprovada amb un relativament elevat consens en el nostre col·lectiu, però que no va ser gens acceptada per altres collegis de l’Estat que volien mantenir la puresa de només l’enginyeria industrial. Això ha portat, fins i tot, que ens obrissin un procés de sanció en els òrgans de direcció del Consejo General de Colegios Oficiales de Ingenieros Industriales, un òrgan que agrupa els diferents col·legis d’enginyers industrials de tot l’Estat. Nosaltres creiem que aquest no és el camí i que amb aquest nombre extens de nous màsters, que, repeteixo, és actualment de cent vuitanta-dos, és impossible que cada un d’ells tingui la seva pròpia associació o col·legi, i que serà necessari que es produeixin aquest tipus d’integracions.
Aquesta incomprensió que es produeix a la resta d’espanya envers moltes decisions que es prenen a Catalunya o que l’afecten, i que es posa de manifest dia rere dia, ha portat a què el debat sobre l’independentisme estigui cada vegada més present en tots els medis. un dels sectors que més reticències hi posava era el dels enginyers industrials, ja que tenen una part important del seu mercat a l’estat, tot i que últimament també hi han sorgit col·lectius que defensen la independència. des del punt de vista dels professionals de l’enginyeria, com els afectaria, arribat el cas, la independència de Catalunya?
Jo crec que Catalunya és un territori amb una població, un grau d’industrialització i una activitat econòmica que perfec-
tament es podrien adaptar a una nova situació, tenint en compte, sobretot, que la nostra activitat econòmica es veu fortament perjudicada per una manca d’elements de suport indirecte a l’activitat industrial, com ho és l’existència d’unes infraestructures insuficients, tant en l’aspecte de la mobilitat per carretera i autopista com en la mobilitat ferroviària, per la inexistència d’una intercomunicació amb l’ample europeu. Pensem que tenint una empresa com SEAT, que produeix uns mil cinc-cents vehicles cada dia, un percentatge molt alt dels quals (molt més del 50 %) va destinat a l’exportació, el fet de no tenir una via ferroviària d’ample europeu de Martorell a França ens causa un gran perjudici. Per altra banda, una Catalunya independent tindria també moltes altres possibilitats, com tenir uns preus millors de l’energia en poder dur a terme una actuació més favorable per a les indústries i poder incentivar tot el que fa referència a la innovació, la recerca i els centres de desenvolupament, que a la llarga és el que dóna valor afegit positiu a la nostra indústria. En aquest sentit, jo no crec que una Catalunya independent perjudiqués en absolut l’enginyeria, sinó al revés: la professió d’enginyer, l’exercici de l’enginyeria i l’activitat industrial del país se’n podrien veure fortament beneficiades.
en diferents mitjans surten sovint notícies sobre la manca d’enginyers que perjudica el creixement industrial i econòmic de Catalunya. Com es veu des del Col·legi aquest fet?
Com una problemàtica greu, i nosaltres celebrem que com a suggeriment de l’INEC, l’associació que reuneix totes les enginyeries de Catalunya, la Generalitat creés el programa Enginycat, que està funcionant des de fa dos anys i creiem que ha començat a donar els seus fruits. Aquest darrer any la matriculació a les escoles ha estat més favorable, i en aquest sentit, s’ha de continuar aquesta tasca. No és un problema que afecti només Catalunya, sinó que és a tot Europa. Els alemanys, per exemple, estan molt preocupats per la manca d’estudiants d’enginyeria, i han hagut de fer venir enginyers d’altres llocs del món, el que ha portat els subsegüents problemes d’adaptació cultural i de forma de treball.
Jo crec que a Catalunya s’ha fet un pas important impulsant els estudis d’enginyeria des del batxillerat. Això en aquest moment té una segona complicació, que és que amb els nous plans d’estudi derivats de l’adaptació a Bolonya, amb la proliferació de titulacions, es fa necessari que les escoles d’enginyeria mostrin clarament els estudis que ofereixen per a una activitat professional, tot i sense amagar que són uns estudis que comporten una dificultat, però també unes compensacions. Al Col·legi estem col·laborant amb les quatre escoles d’enginyeries de Catalunya per dur a terme aquestes tasques de promoció.
esperem que amb el suport i els esforços que realitza aquesta més que centenària institució que com a degà dirigiu, obtingueu els bons resultats que són necessaris per a un millor desenvolupament industrial i econòmic del nostre país. ■
47 e n T revi STA A j o A n vALL vé
Actes organitzats per la Societat Catalana de tecnologia
Podeu trobar més informació sobre les conferències organitzades a la nostra pàgina web http://sct.iec.cat, en la secció «Activitats». A més, en molts casos podreu descarregarvos la presentació al vostre ordinador, o fins i tot tornar a veure la conferència en vídeo. Si no vàreu poder assistirhi, o simplement si voleu compartir-la amb algun/na company/nya, no deixeu passar aquesta oportunitat i feu ús del servei de vídeo. Esperem que aquesta iniciativa sigui un gran èxit.
Josep Maria font-llagunes, doctor enginyer industrial. Conferència: «Una experiència de recerca al Canadà». Facultat de Matemàtiques i Estadística de la Universitat Politècnica de Catalunya, 8 de maig de 2009.
Scott A. Brandt, professor de ciències de la computació i director del Laboratori de Recerca de Sistemes a la Universitat de Califòrnia a Santa Cruz (UCSC) i cofundador i director de l’UCSC / Los Alamos Institute for Scalable Scientific Data Management. Conferència: «La gestió del funcionament de grans sistemes d’emmagatzematge distribuït». Facultat d’Informàtica de Barcelona, 7 de juliol de 2009.
Joan Pallisé. Conferència: «Energia i medi ambient: una mirada perplexa des de la tecnologia». Institut d’Estudis Catalans, 22 de setembre de 2009.
Vicente Guallart, arquitecte i director de l’Institut d’Arquitectura Avançada de Catalunya. Conferència: «Arquitectura multiescalar». Institut d’Estudis Catalans, 20 d’octubre de 2009.
Mari Paz Montes, directora de Producte de Cabal a Endress + Hauser. Conferència: «Mesura de cabal de líquids, gasos i vapor en la indústria». Facultat de Matemàtiques i Estadística de la Universitat Politècnica de Catalunya, 13 de novembre de 2009.
VII Jornada Memorial Democràtic a la Universitat Politècnica de Catalunya: «La tecnologia a les historietes de la postguerra». Escola Tècnica Superior d’Enginyeria Industrial de Barcelona, 26 de novembre de 2009.
Javier Cuadrado, director del Laboratori d’Enginyeria Mecànica de la Universitat de la Corunya. Seminaris de Biomecànica: «Introducció a la dinàmica de sistemes multisòlid i aplicacions». Escola Tècnica Superior d’Enginyeria Industrial de Barcelona, 27 de novembre de 2009.
Javier Alonso, professor del Departament d’Enginyeria Mecànica, Energètica i dels Materials de la Universitat d’Extremadura. Seminaris de Biomecànica: «Tractament de senyals cinemàtics i de masses de teixit tou en l’anàlisi dinàmica inversa de models biomecànics». Escola Tècnica Superior d’Enginyeria Industrial de Barcelona, 27 de novembre de 2009.
Cicle de lectures «Còmic, ciència i tecnologia». Lectura núm. 1: «Ramon Llull: un precursor de la tecnologia». Escola Tècnica Superior d’Enginyeria Industrial de Barcelona, 18 de febrer de 2010. Participants: Eduard Torrents, enginyer industrial, guionista i dibuixant de l’obra, i Àlex martínez giralt, prologuista de l’obra i investigador d’història medieval. Moderador: Jordi ojeda, professor de la Universitat Politècnica de Catalunya i coordinador del cicle de lectures. Josep M. Guerrero. Conferència: «Generació distribuïda d’energia: cap a una xarxa elèctrica més intel·ligent». Escola Universitària d’Enginyeria Tècnica Industrial de Barcelona, 4 de març de 2010.
Cicle de lectures «Còmic, ciència i tecnologia». Lectura núm. 2: «Tecnologia i terrorisme». Escola Tècnica Superior d’Enginyeria Industrial de Barcelona, 11 de març de 2010. Participants: Joan Mundet, dibuixant de l’obra; Antoni Guiral i Pepe Gálvez, guionistes de l’obra, i Josep M. Fuertes, doctor enginyer industrial i president de la Societat Catalana de Tecnologia. Moderador: Jordi Ojeda, professor de la Universitat Politècnica de Catalunya i coordinador del cicle de lectures.
Jordi Berenguer i Sau, doctor enginyer de telecomunicació i director de l’Escola Politècnica Superior de Castelldefels de la Universitat Politècnica de Catalunya. Conferència: «La televisió digital terrestre: un color millor... i alguns grisos». Institut d’Estudis Catalans, 28 d’abril de 2010.
Cicle de lectures «Còmic, ciència i tecnologia». Lectura núm. 3: «Tecnologia futurista en els videojocs». Campus Nord de la Universitat Politècnica de
48 R evista de T ecnologia , núm. 4 (2011), p. 48-52 • ISSN (ed. impresa): 1698-2045 • ISSN (ed. electrònica): 2013-9861 • http://revistes.iec.cat/index.php/ RTEC
actualitat
ACTUALITAT
Catalunya, 5 de maig de 2010. Participant: Alfonso Azpiri, autor de l’obra. Moderador: Jordi Ojeda, professor de la Universitat Politècnica de Catalunya i coordinador del cicle de lectures.
Segones Jornades sobre Innovació a l’Ensenyament de la Tecnologia: Els Reptes dels Nous Recursos. Museu de la Ciència i de la Tècnica de Catalunya, 7 i 8 de maig de 2010. Aquesta segona edició girà al voltant del repte que suposen els nous recursos digitals, amb la perspectiva de la implementació generalitzada del projecte eduCAT1x1.
Jordi Ojeda i Rodríguez, doctor enginyer industrial, professor al Departament d’Organització d’Empreses de la Universitat Politècnica de Catalunya i director de Rational Time, SL. Conferència: «Solucions a la problemàtica actual dels horaris laborals». Andorra la Vella, 15 de juny de 2010.
Carles Romea, enginyer industrial. Conferència: «Una història del formigó». Institut d’Estudis Catalans, 15 de juny de 2010.
József Kövecses, del Departament d’Enginyeria Mecànica i del Centre for Intelligent Machines de la Universitat McGill (Mont-real, el Quebec, el Canadà). Seminari de Mecànica Aplicada: «Analytical formulations in lagrangian dynamics: theoretical aspects and applications to interactions with virtual and physical environments». Escola Tècnica Superior d’Enginyeria Industrial de Barcelona, 6 de juliol de 2010.
Adolf Comerón. Conferència: «Pols, gasos, vent i cendres: radars làser per al sondeig de l’atmosfera». Institut d’Estudis Catalans, 15 de juliol de 2010.
Joaquim Agulló i Batlle, doctor enginyer industrial. Conferència: «Ciència i enginyeria dels instruments musicals. El cas de les xeremies de la cobla». Institut d’Estudis Catalans, 28 de setembre de 2010.
Albert Pèlachs i Ermengol Gassiot, doctors professors del Departament de Geografia i del Departament de Prehistòria de la Universitat Autònoma de Barcelona (UAB), respectivament. Conferència: «Una passejada per la geohistòria ambiental i metal·lúrgica del ferro a la vall Ferrera». Centre Excursionista de Catalunya, 13 d’octubre de 2010.
Estanislau Tomàs i Víctor Fuses conferència: «Les darreres fargues. Les mines i la fàbrica del ferro de la Sènia». Centre Excursionista de Catalunya, 9 de novembre de 2010.
Josep M. Fuertes, Antoni Guiral, Antonio Martín, Jordi Ojeda, Antoni Roca i Mònica Rius. IX Jornada Memorial Democràtic a la Universitat Politècnica de Catalunya: «Els fonaments de la cultura popular: el cas de l’Editorial Bruguera». Escola Tècnica Superior d’Enginyeria Industrial de Barcelona, 1 de desembre de 2010.
Albert Pèlachs i Ermengol Gassiot, doctors professors del Departament de Geografia i del Departament de Prehistòria de la Universitat Autònoma de Barcelona (UAB), respectivament. Conferència: «L’evolució paisatgística de la vall Ferrera als darrers dos mil anys». Institut d’Estudis Catalans, 27 de gener de 2011.
Jaume rosset i llobet, doctor metge especialista en medicina de l’esport i en cirurgia ortopèdica i traumatologia. Conferència: «La tecnologia aplicada als castells humans». Institut d’Estudis Catalans, 3 de març de 2011.
Convocatòria de premis
PREMI PER A ESTUDIANTS DE LA SOCIETAT CATALANA DE TECNOLOGIA DE L’INSTITUT D’ESTUDIS CATALANS
La Societat Catalana de Tecnologia, dins el marc de premis per a estudiants de l’Institut d’Estudis Catalans, convoca anualment el premi instituït l’any 1969. El premi està destinat a un treball d’investigació, bibliogràfic o d’assaig sobre tecnologia. El treball ha d’ésser redactat en català i elaborat abans d’aquesta convocatòria. No es podran considerar treballs ja premiats anteriorment o subvencionats per l’Institut o una altra institució.
Poden prendre part en aquesta convocatòria estudiants universitaris i persones titulades des de l’1 de febrer de 2007. La dotació del premi és de 1.000 euros. Es poden concedir fins a dos accèssits. Es publicarà un resum del treball premiat a la revista de tecnologia
Termini d’entrega de la documentació: 2 de desembre de 2011, a les 13 hores Lliurament dels premis: abril de 2012
Per a més informació: http://sct.iec.cat
PREMI FUNDACIÓ TORRENS-IBERN
FUNDACIÓ TORRENS-IBERN tècnica i ciència en català

Premi instituït el 1977. Enguany es convoca per dinovena vegada. És ofert al millor treball original sobre terminologia cientificotècnica de l’àmbit de les enginyeries, l’arquitectura, la física, la química, la biotecnologia, les matemàtiques i les ciències ambientals.
Es valorarà l’impacte social i la qualitat en l’ús de la terminologia.
La ponència serà formada per tres membres: dos de designats per l’Institut d’Estudis Catalans (un a proposta de la Secció de Ciències i Tecnologia i un altre a proposta de la Secció Filològica) i un de designat per la Fundació Torrens-Ibern.
49 A c T u AL i TAT
La dotació del premi, que aporta la Fundació TorrensIbern, és de 3.000 euros.
Termini d’entrega de la documentació: 2 de desembre de 2011, a les 13 hores
Lliurament dels premis: abril de 2012
Per a més informació: http://www.torrens-ibern.cat i http://www.iec.cat
PREMI UPC PER A TREBALLS DE RECERCA DE BATXILLERAT I DE CFGS
La Universitat Politècnica de Catalunya (UPC) convoca el desè Premi UPC per a treballs de recerca de batxillerat i de cicles formatius de grau superior en l’àmbit de l’arquitectura, la ciència i la tecnologia sostenibles, adreçat a l’alumnat de segon de batxillerat de Catalunya, de les modalitats de tecnologia i ciències de la naturalesa i la salut, i de cicles formatius de grau superior amb accés als estudis impartits a la UPC. El premi pretén fomentar l’interès de l’alumnat de batxillerat per aquestes àrees de coneixement i pel valor de la sostenibilitat, aplicat a la concepció i al desenvolupament dels seus treballs de recerca. El premi al millor treball de batxillerat i al millor projecte de CFGS consisteix en un ordinador portàtil, un lot de publicacions i una beca de gratuïtat de tots els crèdits matriculats per primera vegada durant l’any acadèmic 2011-2012 en estudis oficials a centres propis de la UPC. La tutoria del treball i el centre també seran premiats.
Termini d’entrega de la documentació: abril de 2012
Lliurament dels premis: 2012
Per a més informació: http://www.upc.edu/premis
L’any 2010 s’ha atorgat el premi al millor treball de recerca de batxillerat a Il·luminació pública d’alta eficiència basada en LED, de David San Román Torrubia, del centre Collegi Badalonès de Badalona i tutoritzat per Jordi Mazón Bueso.
PREMI DAVYD LUQUE

Aquest premi, que se celebra des de l’any 2005, és obert als treballs i projectes que aportin idees innovadores o millores
tecnològiques als serveis TIC que ofereix o pot oferir la Universitat Politècnica de Catalunya, així com un estalvi de costos i un increment de la seguretat, i que promoguin el programari lliure, les tecnologies multimèdia, la ubiqüitat dels clients, l’accessibilitat dels serveis, la pluridisciplinarietat i la sostenibilitat.
Poden optar al premi totes les persones físiques que pertanyin a la comunitat UPC: alumnat, personal docent i investigador, personal d’administració i serveis, etc. Poden presentar-se equips algun membre dels quals formi part dels col·lectius mencionats anteriorment.
El premi es compon de material informàtic, valorat en 4.000 euros per al treball guanyador, i en 2.000 euros per al finalista.
Termini d’entrega de la documentació: abril de 2012 Lliurament dels premis: desembre de 2012
Per a més informació: http://www.upcnet.es/premi-davydluque
L’acte de lliurament de la sisena edició del Premi Davyd Luque a la Innovació en les TIC va tenir lloc el 16 de juny de 2010 al Palau de la Música Catalana, en el marc de la Nit UPC. Els guanyadors d’aquesta edició van ser Raimon Lapuente, Enric Mayol, Jordi Piguillem i Marc Alier, que es van emportar el primer premi amb la seva proposta: Eina de comunicació per a equips de projectes El segon premi va ser per a Daniel Beneyto i Oriol Bosch, que van recollir el premi pel seu UPCcal
PREMIS DE L’INSTITUT DE TECNOÈTICA
L’Institut de Tecnoètica (antiga Fundació Epson) es va crear l’any 1998 amb la finalitat d’unir desenvolupament tecnològic i valors ètics. Entre altres activitats, l’Institut convoca anualment els tres premis que es detallen a continuació:
Premis José Cantero: als millors treballs de batxillerat i cicles formatius de grau superior en l’àmbit de les tecnologies i els seus impactes socials.
Premis Eusebi Colomer: al millor assaig sobre cibercultura i sobre aspectes filosòfics o ètics de la nova societat tecnològica.
Premis Rosina Ribalta: als millors projectes de tesi doctoral en l’àmbit de les tecnologies de la informació i de les comunicacions.
Termini d’entrega de la documentació: vegeu la convocatòria de 2011
Per a més informació: http://tecnoetica.org
50 A c T u AL i TAT
actualitat
CERTAMEN ARQUÍMEDES

El certamen universitari Arquímedes, convocat per la Direcció General de Política Universitària del Ministeri d’Educació, pretén fomentar l’esperit científic entre els estudiants de les universitats espanyoles.
L’objectiu d’aquest certamen és premiar els estudiants universitaris que hagin desenvolupat idees originals que contribueixin al desenvolupament de la investigació científica a la comunitat universitària espanyola.
Termini d’entrega de la documentació: abril de 2011
Per a més informació: http://www.educacion.es/educacion/ universidades/convocatorias/estudiantes/certamen-arquimedes.html
PREMIS CIRIT

Des de l’any 1982, el Consell Interdepartamental de Recerca i Innovació Tecnològica (CIRIT) obre anualment convocatòria pública dels Premis CIRIT per fomentar l’esperit científic del jovent. Els premis tenen l’objectiu de fomentar la creativitat científica i l’esperit de recerca de l’alumnat d’ensenyament secundari de Catalunya.
Es premien setanta treballs de recerca d’alumnes de secundària i de cicles formatius, i els premis consisteixen en 750 euros per a cada treball. A més, també es premien deu centres de secundària amb 2.500 euros.
Termini d’entrega de la documentació: juny de 2011
Per a més informació: http://www.gencat.cat/diue/serveis/premis/ ur/premis_cirit/index.html
ARGÓ
La Universitat Autònoma de Barcelona (UAB) convoca des de l’any 2003 el Premi ARGÓ per a treballs de recerca de batxillerat i projectes de cicles formatius de grau superior, amb la finalitat de reconèixer l’esforç dels estudiants i d’incrementar els vincles amb els centres d’ensenyament secundari. Es premiarà el millor treball de recerca de cadascun dels cinc àmbits establerts. Un d’aquests àmbits és el tec-
nològic. Es concedeixen tres premis i cinc mencions en cada àmbit. El primer premi consisteix en un ordinador portàtil per treball premiat i la matrícula gratuïta per cursar el primer curs a la UAB per a tots els autors del treball. A més, hi ha una menció especial per a un treball de l’àmbit tecnològic fet per una o més noies.
Termini d’entrega de la documentació: 21 de juny de 2011
Per a més informació: http://www.uab.cat/ice/argo
Recursos web
Associació del Professorat de Tecnologia de Catalunya
http://www.aptc.net

L’Associació del Professorat de Tecnologia de Catalunya ha posat en marxa un portal desenvolupat amb el programari Moodle per tal de mostrar la seva activitat i oferir el seu treball a tothom. En aquest lloc web podreu posar-vos en contacte amb persones d’aquest col·lectiu, compartir inquietuds i iniciatives, disposar d’un espai de debat i també dels recursos que es vagin generant.
El somni de Monturiol
http://www.monturiol.net
Us oferim aquest enllaç a un joc en línia inspirat en la vida de l’enginyer Narcís Monturiol i en els seus submarins Ictíneo. Es tracta d’un joc que combina aprenentatges sobre la vida de Monturiol amb l’aventura de l’exploració submarina.
51 A c T u AL i TAT
PREMI
Recerca en Acció
http://www.recercaenaccio.cat
L’objectiu d’aquest web és donar a conèixer la investigació que es fa a Catalunya en totes les disciplines, tant pel que fa als resultats com als mètodes i eines emprats, de manera amena, gràfica i participativa. L’internauta hi podrà trobar les últimes notícies relacionades amb la recerca, enllaços a diversos blocs sobre ciència i una agenda d’activitats científiques, així com visites recomanades a centres i museus. El web té un apartat en què es presenten projectes de recerca de diferents disciplines. Es presenta una descripció del projecte, l’equip científic i material multimèdia divers perquè el lector pugui aprofundir-hi. Un altre apartat interessant és el de material multimèdia, en què l’internauta podrà trobar galeries de fotografies, jocs interactius per aprendre ciència, etc. El web permet la participació de l’internauta, que pot enviar preguntes a equips científics especialitzats, dur a terme alguns experiments que es presenten i resoldre enigmes científics. El web també ofereix tot tipus de documents divulgatius i especialitzats sobre diferents àmbits científics; també es recomanen llibres i enllaços web que permeten que el lector hi aprofundeixi. El web és totalment interactiu i té enllaços amb les principals xarxes socials, com ara Facebook, Twitter o Delicious.

Butlletí de recerca de Catalunya

http://www.gencat.cat/recerca/recercat/ Recercat és el butlletí electrònic del Comissionat per a Universitats i Recerca. Conté informació sobre recerca, ciència i tecnologia. Es tracta d’una eina de comunicació al servei de la difusió de la recerca d’excel·lència i de la tasca que estan duent a terme universitats, empreses, centres, grups i personal investigador a Catalunya.
Aquesta publicació té una periodicitat quasi mensual i es pot rebre a qualsevol bústia de correu electrònic donant-se d’alta a una llista de distribució en el mateix lloc web.
El butlletí adopta la forma d’un recull de notícies breus que inclouen un enllaç per poder ampliar-ne la informació. Dins del butlletí, les notícies s’agrupen en diferents apartats, com ara: «Notícies de Catalunya», «Notícies de la Unió Europea», «Catalunya innova», «Ciència i tecnologia», «Universitats i centres de recerca», «Personal educador», «Recomanacions» i «Novetats del web».
Aquest butlletí també es difon a través de les xarxes Facebook i Delicious.
52 A c T u AL i TAT
actualitat
L A SECCT CELE b RA EL CENTENARI DE LA S ECCI ó DE C I è NCIES
Secció de Ciències
L’IEC va ser fundat el 1907 com a centre d’estudis històrics i el 1911 se’n produeix l’ampliació en tres seccions (la Històrico-Arqueològica, la de Ciències i la Filològica), un centenari d’aquestes tres seccions que l’IEC celebra amb el lema «Cent anys de ciència en català».
E ls premis Nob
Durant aquest centenari s’organitzen un conjunt d’activitats i actes, com la jornada que tindrà lloc a la tardor amb el títol «L’ideal científic de Catalunya 1911-2011», en què es farà una reflexió històrica sobre les aportacions dels primers membres de la Secció de Ciències, els científics Eugeni d’Ors i Esteve Terradas; la investigació biomèdica de Ramon Turró i August Pi i Sunyer; el naturalisme de Josep M. Bofill i Pichot, i les aportacions de l’assagista i filòsof Pere Coromines.
La Secció de Ciències, actualment desdoblada en la Secció de Ciències Biològiques i la Secció de Ciències i Tecnologia, inicià els actes commemoratius del seu centenari el 21 de juny, amb l’organització de la jornada «La posició de les llengües mitjanes com a eines científiques», per analitzar i compartir, amb altres comunitats lingüístiques, les estratègies, sobre l’ús complementari de la llengua pròpia en la producció i la comunicació científica, i de l’anglès, majoritàriament, per a la projecció internacional. En aquesta jornada participaren lingüistes i científics procedents de Catalunya, Bèlgica, Suècia i Israel.

evista de T ecnologia , núm. 4 (2011), p. 53 • ISSN (ed. impresa): 1698-2045 • ISSN (ed. electrònica): 2013-9861 •
53 R
RTEC
http://revistes.iec.cat/index.php/
Centanys 19112011
actualitat
