
#1206 147 件/組 10 10 發明是可以學習的 發明是可以學習的 INVENTING CAN BE LEARNEDINVENTING CAN BE LEARNED 20 20堂 堂 實作課程 實作課程










是可以學習的發明 Gigo 智高 Learning Lab 決問題的能力,更能將這些知識活用,進而學習創新的技巧與能力。我們希望小朋友透過動手玩積木的過程中,快樂地學習科學知識,培養正確的學習態度及解5.用積木做實驗,零件可重覆使用,省時省力。4.課程由淺入深,涵蓋各國生活科學課綱,並與日常生活應用結合。3.天生我才必有用,兼顧個人學習與團隊分組合作。2.跳脫傳統教學架構,遊戲競賽中學習創新。1.課程以積木為主軸,每堂課都有積木組裝創作。學習實驗室全系列包含個人包裝及學校包裝,特點如下: 1


321 55 21114 第 8 課 人臉識別門禁 51433523453929第 5 課 專題製作 (1) 第 6 課 掃碼卸貨車 第 7 課 智慧結帳櫃台 第 2 課 智慧分類機 第 3 課 循跡無人車 第 4 課 定時器 第 1 課 前言目錄零件清單準備工作訓練影像分類、物件追蹤進入AI積木的世界打招呼機器人 105117111999179696167758593第 9 課 圖標機械手 第 10 課 專題製作 (2) 第 19 課 人臉辨識點名系統 第 18 課 無人公車 第 17 課 物聯網智能居家 第1 6 課 寵物餵食器 第 15 課 專題製作 (3) 第 14 課 資源回收裝置 第 13 課 寵物跟隨模式 第 12 課 自動應答機器人 第 11 課 人流偵測機 第 20 課 專題製作 (4) 目 錄 2
3 準的辨識能力,親自實踐機器學習的技術。類與物件等功能。隨著上傳的照片與訓練的次數越多,智高AI主控盒將有更精並將照片上傳至Web:AI線上平台,訓練智高AI主控盒實現影像辨識、影像分本套組以智高AI主控盒為核心,你可以使用其攝影鏡頭拍攝生活周遭的物品,移、縮小、旋轉或變形等情況下,電腦都能正確得辨別。式,透過比較多張影像之間的差異,保留並紀錄影像的特徵,使得不論圖像平Neural與分析的數據量較大,為了能有效提升準確率,卷積神經網路(Convolutional不論是機器學習或是深度學習皆促成影像辨識技術越趨成熟,但影像需要處理而不是由人類來決定特徵值。就此誕生,深度學習是讓電腦可以透過演算法自行分析資料找出「特徵值」,為了減少人為錯誤因素並達到真正的AI技術,「深度學習」(deep訊。決策時,仍是需要由程式設計師事先告訴電腦「特徵值」與「最佳決策」的資行的結果。存取的資料越多,行動的準確度也越高。然而在物件辨識或行為的備學習能力」;因此必須不斷地將大量的資料輸入電腦,讓電腦產出分析或執機器學習(machine學習」(machine人工智慧(AI)其起源可追溯自1955年,但真正使其快速發展的關鍵為「機器一起來暸解人工智慧的基礎概念吧!更便利,帶來正面貢獻,不被機器人取代。跟著本包裝發展方向,如何妥善運用人工智慧這個「工具」使生活1997年深藍電腦打敗世界棋王,引領世界思考AI未來所收集的資訊不斷自我學習、進化。程式的方式去模擬出人類大腦運作方式,而且可以根據由美國科學家JohnIntelligence,AI),又稱人工智能,人工智慧的概念是視為目前世代應當學習的技能。然而什麼是人工智慧?人工智慧(ArtificialAI人工智慧的新世代來臨,且已經趨近成熟。要駕馭人工智慧,程式語言被McCarthy於1955年提出,意指用learning)與「深度學習」(deeplearning)的技術應用。learning)基本定義是「不需要經過程式導引下,機器就具learning)Networks,CNN)成為AI的發展主力。CNN採用了類似人類視覺的方 AI與影像辨識 進入 AI 積木的世界

4 深的進入AI的互動世界!言的編寫,使模型與程式互相連動,在實驗中了解AI原理與機械結構,由淺入慧結帳櫃台、人臉識別門禁、物聯網智能居家等16款模型,並且透過程式語此外,你還可以搭配Gigo智高1公分系列積木,組裝出如打招呼機器人、智 在正式進入學習課程之前,請依序完成下列準備工作 認識主要零件準備工作一 C D E B AA. 50倍行星齒輪馬達盒(DDM) 操作。由智高AI主控盒連接到傳動軸後依照指令 B. 180度角度伺服馬達(金屬齒輪) 操作,可於0~180度之間旋轉。由智高AI主控盒連接到傳動軸後依照指令 D. 按壓感應器 並將感測值傳回智高AI主控盒。像手指能夠感覺它是否已經觸碰到物體, E. 18650雙用鋰電池座 具充放電功能,本套組不包含鋰電池。 C. IR循跡感應器 偵測距離變化,可應用於偵測物品。







5 1 2 1 2 如何安裝電池 4 5 將硬幣插入孔內 往右扭轉解鎖 用手指扳凹處將電池蓋往上打開 完成! 6 因內含重要訊息,請將說明書妥善保存認識智高AI主控盒 準備工作二 智高AI主控盒 智高AI主控盒内建Web:AI (Micro麥克風按壓感應器等。行星齒輪馬達盒(DDM)、180度角度伺服馬達(金屬齒輪)、IR循跡感應器、另外提供八組智高輸入/電源供電。)能,請使用本包裝內的18650雙用鋰電池座(不包含鋰電池)與DC5V/2A以下喇叭及一組外部輸入電源接口(Micro開發板、攝影機Sensor、螢幕LCD顯示、麥克風、USB母座,本智高AI主控盒不具充電功輸出接口及八組杜邦接頭,這些接口可以外接50倍正面背面500萬畫素攝影機(可180度翻轉)PC端連接口(Mirco-USB)2.3吋LCD彩色顯示螢幕SD插槽)按鈕揚聲器外接電源輸入接口(Mirco-USB)杜邦接頭x8輸入/輸出接口智高接頭x8輸入/輸出接口MicroUSB接口(輸入)電源開關USB接口(輸出)18650鋰電池x1(電池未含) 18650 雙用鋰電池座 5V / 2A行動電源 1 2 1 2 2 31 裝入18650鋰電池 裝上電池蓋 電池蓋往下壓聽見喀聲













6 智高AI主控盒連接方式智高AI主控盒接腳配置 輸入/ 輸出接腳配置圖( 杜邦接頭母座) P4P6P0P3P9P8P1P7 EP1P7 FP9P8 GP0P3 HP4P6 A P15P16 B P14P13 C P10P2 D P19P20 DCBA DC 5V HGFE46039817 使用腳位時不得重複,例如:使用輸入/輸出E插孔,不得再插入杜邦 P7腳位, 連接口與電腦的USB插槽。若要傳輸程式或更新韌體,請將USB傳輸線分別插入智高AI主控盒的PC端此外H插孔與杜邦P6、P4腳位為預留配置暫無功能。


7 使用瀏覽器進入Web:AI程式積木頁面準備工作三 用瀏覽器,連結到Web:AI程式積木網頁:Web:AI程式積木無須下載程式設計軟體,直接使用網頁進行編寫程式。首先使 https://ai-blockly.webduino.io/#/ 進入程式積木網頁畫面。如下圖: A BCDE FG I J H 介面功能說明如下: 程式積木所編寫的程式,以供參考學習,但不可作修改。積木/程式碼:點擊後可於工作區設計程式,或切換程式碼以Python展示A. 檔案:可以開啟與儲存積木程式及製作分享程式連結。B. 範例:提供物件追蹤及影像辨識…等範例程式。(請選擇與後續課程相關之範例)C. 擴充:擴充專屬Gigo智高感應器與馬達的程式積木。教學:提供Web:AI相關操作教學。D.E. 清空:刪除工作區內的所有項目。F. 可供選擇。版本更換選單。語言選單包含英文、中文(簡體)及中文(繁體),共3種語言更多:內含WI-FI設定(對智高智慧主控盒進行Wi-Fi設定)、下載安裝版及語言G. 執行:啟動Web:AI,運行積木程式碼。H. 作區以組成各式各樣的程式。程式積木:提供編寫程式的各種程式積木,依照使用者需求將程式積木拖拉到工I. 一個程式。工作區:程式編寫的主要區域,透過拖拉程式積木到這個區域,並將它們組合成J.

8 擴充#1206-CN AI 人工智慧積木組準備工作四 更新智高AI主控盒的韌體版本準備工作五 請先點擊Web:AI線上版頁面中的「擴充」按鈕(A),來添加#1206-CN 更新過程中請勿斷開USB連接或關閉分頁。著選擇你的智高AI主控盒並點擊「連線」(E)。最後等待韌體更新流程完成即可,請將智高AI主控盒以USB線連接到電腦,並點擊「開始連接USB」(D),接裡找到目前最新的韌體版本(B),並點選「更新智高版韌體」執行韌體更新(C)。頁上的版本不同,請立即更新您的智高AI主控盒。你可以在「更多」下拉選單在開機後,智高AI主控盒將會顯示目前的韌體版本(A),若您發現其版本與網器與馬達的程式積木。智慧積木組(B)。添加完成後,即可於程式積木的下方找到專屬Gigo智高感應AI人工 A B C D 韌體更新教學影片 B A E







9 進入 AI 積木的世界 Wi-Fi連線教學影片 智高AI主控盒Wi-Fi設定準備工作六 第一次使用智高AI主控盒或是更改連線的Wi-Fi 時,都需要使用 Web:AI線上 2.1.請注意:版對智高AI主控盒進行Wi-Fi設定完成連線。在Wi-Fi連線前,務必先依照【準備工作五】完成韌體更新,以確保智高AI主控盒能正常連線。智高AI主控盒尚不支援5G網路,請使用4G網路進行連線。在Web:AI線上版頁面中,點擊「更多」按鈕,接著點選WI-FI設定。 A. 跳出「WiFi設定」視窗,輸入SSID ( 欲連線的Wi-Fi名稱 ) 和密碼( Wi-Fi密碼 )。B. 點擊「設定」,進入QRcode頁面。C. (-51為綠色”Connected”,即完成Wi-Fi設定。請注意:若dBm值(E)小於-50設定完成後智高AI主控盒會重新啟動,畫面會顯示SSID資訊、Wi-Fi狀態頭對準QRcode掃描,完成Wi-Fi連線。秒內按下R按鈕(D),進入QRcode掃描模式。接著使用智高智慧主控盒鏡當網頁顯示QRCode時,請將您的智高智慧主控盒開機,並在開機後的7<-50),這代表Wi-Fi可能不穩定,建議您更換更穩定的網路。D.E. A A C B B D D E




10 開啟程式範例執行課程準備工作七 如有使用音效及影像辨識的課程因需較大的資料儲存空間,請插入小提示1:行16課的課程操作。Web:AI程式積木線上版,點擊「檔案」>「開啟」將程式範例打開,即可以進本包裝提供16課程式範例,請使用瀏覽器輸入下方連結下載程式範例。開啟 Micro SD 卡,並將連結內的各個「音效檔」與「影像辨識模組」檔案下載至 SD 卡中以 利課程進行,本套組內不包含 Micro SD 卡。 程式範例QR後點擊R按鈕進入QR若想快速測試模型作動效果,我們提供四課範例程式,請將智高AI主控盒開機小提示2:code掃描模式,並掃描P37、P83、P103、P115頁的code,即可執行模型程式。 https://www.dropbox.com/sh/pn8pvyly0xgdazh/AAD7KjjIcMgDmf_9LbfEJIj2a?dl=0 Web:AI補充內容SD卡教學影片R 故障排除 明書不同時,可以掃描此QRcode參考教學內容。如果因Web:AI程式積木版本不同而使操作介面方式與本說


11 進入 AI 積木的世界 使用瀏覽器,連結到影像訓練平台網頁: https://account.webduino.io/user/login 個選項。在Webduino影像訓練頁面中可以看到左側的側邊欄有「分類」和「模型」兩 B A A 訓練影像分類、物件追蹤 驟或教學影片,完成影像訓練流程。分別建立影像分類和模型,接著將分類下載至智高AI主控盒中!請依照以下步若要使用影像辨識的功能,必須先將影像上傳至Webduino影像訓練平台,並 登入影像訓練平台步驟一 建立分類步驟二點擊藍色「新增」按鈕,跳出「建立分類」視窗。點擊「分類」進入分類列表。帳號直接登入,進入Webduino影像訓練。點擊「註冊」按鈕,註冊帳號或使用Google、FBB.A.A.


12 輸入分類名稱,注意請勿輸入中文、空格、符號。C. 選擇分享狀態。D. 影像上傳方式點選「Web:AI」,進入下一步。E. C D E F. 輸入要拍照的數量,建議拍攝20張。 G. 輸入Device ID。 H. 點擊「建立分類」,出現傳送指令成功視窗,可開始進行拍照。 F G H




13 進入 AI 積木的世界 拍照模式介面:使用智高AI主控盒拍攝影像 左上角白色 take:數字:目前拍照張數。A. 拍完設定的照片數量後,畫面會變全黑,按下 L 按鈕上傳圖片。A. 右下角紅色 press R Back:按下R按鈕返回。C. 點擊R按鈕返回。C. 左下角紅色 press L Tack:按下L按鈕拍照。B. 等待上傳完成後,畫面中央會顯示「Upload completed」,正下方顯示上 傳時間。 B. 中間白色方框:讓拍攝物件跟方框相當大小時按下 L按鈕拍攝,並且稍微轉 動角度,拍攝「不同角度影像」。 D. A D B C A C B 上傳影像步驟三



14 完成後會跳出已建立分類且上傳完成的照片視窗。D. 建立 4 個分類步驟四 拍攝模型中放置物件的平台,以提升辨識率。拍攝背景(null)時,請勿拍攝與物件顏色相似的背景,建議小提示3:拍攝物件時,周遭亮度不可太暗或太亮,以免影響辨識率。小提示2:距離應與模型偵測的距離相同。為了增加準確度,總照片數量至少為80張,且拍攝物件的小提示1:因此請重複上述建立分類、拍攝影像步驟,建立兩個以上的分類。進行影像辨識時,模型內需要放入3個分類以及背景分類(null)才能進行辨識, D 影像辨識教學影片


15 進入 AI 積木的世界 建立模型步驟五 AI主控盒中。當你完成步驟四建立分類後,必須將數個分類統整成「模型」,並下載至智高建立完分類後,在左側的側邊欄選擇「模型」,進入模型列表。 A. 輸入模型名稱,請勿輸入中文、空格、符號。C. 選擇分享狀態。E. 點擊藍色「新增」按鈕,跳出「新增模型」視窗。B. 點選影像分類,可選定為影像分類或物件追蹤模式。D. 模型建立方式點選「挑選分類」,進入下一步。F. A B C D E F


16 等待模型訓練完成後,就可以在模型列表中找到建立的模型。H. 點擊「建立模型」。從分類列表中點選4個要進行影像辨識的分類,記下點選的分類名稱順序,G.


17 進入 AI 積木的世界 A 下載模型步驟六 完成步驟五建立模型後,便可將模型下載至智高AI主控盒中。點擊要進行影像辨識的模型。 A. 跳出「模型選項」視窗,點擊「下載模型」按鈕。B. 輸入Device ID。C. B C


18 點擊「下載模型」按鈕,出現「傳送指令成功」。D. 接著智高AI主控盒進入下載進度畫面,過程中請確保Wi-Fi連線穩定。E. 完成100%後,畫面會顯示「Download completed」字樣,點擊R按鈕 後即可完成下載模型。 F. D F



19 B A H G EF I D E C F 程式積木執行影像辨識步驟七 開始進行影像辨識!完成步驟三至步驟六將模型下載至智高AI主控盒後,只需再撰寫程式積木即可前往Web:AI程式積木頁面,點選「進階功能」>「影像分類」。 A. 拉入「設定模型」積木,選擇模型名稱。B. 點選「重複」將「重複無限次,背景執行,執行」積木拉入程式下方。C. 點選「文字」將「建立字串」積木拉入中「LCD 顯示文字」積木內。F. 程式編輯完成後,按下右上角綠色「執行」按鈕,出現「程式燒錄中…」。I. 執行」積木內。點選「影像分類」將「開始辨識影像」積木拉入「重複無限次,背景執行,D. 影像」積木下方。點選「LCD螢幕」將「LCD顯示文字(限英文、數字)積木拉入「開始辨識E. 點選「開發板積木」,將「使用WI-FI控制Web:AI 執行」積木拉入放置最 外層,接著於控制後方輸入智高AI主控Device ID。 H. 像分類」將「取得辨識到的影像(信心度)」積木拉至下方。串」積木中,接著點選文字將「”接著點選「影像分類」將「取得辨識到的影像(名稱)」積木放入「建立字“」積木拉入下方且輸入”/”。點選「影G.


20 模型。若要使用其它模型來進行影像辨識,需要回到步驟六「下載模型」,再次下載讀取結束後,智高AI主控盒會自動開啟辨識畫面,使用鏡頭對準辨識物件就能看到文字顯示辨識結果和信心度。 J. 延伸課程程式調整 系統以及遙控車,請掃描QRcode參考延伸課程說明書。課程,包含智慧語音控制、國際時鐘、無線相機、人臉辨識點名除了本說明書的20堂實作課程外,我們另有提供5個線上延伸的信心度指數,以提升辨識率。以第二課智慧分類機為例,您可以觀察每個物件平均的信心度,並調整程式中達的不同而有些許差異,因此我們必須依照每個模型作動情況去調整程式。即便是相同的模型與影像訓練照片,在辨識時仍會因為智高AI主控盒與伺服馬延伸課程註:取得辨識到的影像信度心為0~1,當信心度愈接近1時表示,辨識的物品準確率愈高;愈接近0準確度則反之愈低。

21 1 x10 9 x4 10 x2 8 x2 7 x2 6 x1 5 x1 4 x2 3 x3 2 x20 13 x1 18 x2 17 x2 16 x2 15 x2 14 x2 23 x3 12 x1 11 x2 28 x2 37 x1 27 x2 35 x2 26 x2 34 x4 25 x2 33 x4 24 x2 30 x5 40 x1 29 x2 31 x2 39 x1 21 x2 32 x2 20 x2 22 x2 19 x6 36 x3 46 x4 38 x1 45 x4 44 x1 43 x2 42 x2 41 x1 51 x1 50 x2 49 x2 48 x1 47 x4 52 x1 53 x1 54 x2 55 x1 56 x1 57 x1 58 x1 59 x1 零件清單






















































22 31 C-15孔超長條 2 32 C-3x13孔超長方框 2 33 C-5×5孔正方框Ⅱ 4 34 C-5×10孔長方框II 4 35 C-5×15孔長方框 2 36 C-P型飾片 3 37 C-Q型飾片 1 38 C-K型飾片 1 39 C-N型飾片 1 40 C-O型飾片(左) 1 41 C-O型飾片(右) 1 42 C-OD60x25mm橡膠輪框 2 43 C-OD60x25mm塑膠輪胎 2 44 C-萬向滾輪 1 45 C-60T輪毂 4 46 C-20齒履帶 4 47 C-21齒履帶 4 48 C-180度角度伺服馬達 1 49 C-50倍行星齒輪馬達盒(DDM) 2 50 C-IR循跡感應器 2 51 C-按壓感應器 1 52 C-LED燈座組-紅 1 53 C-LED燈座組-黃 1 54 C-LED燈座組-綠 2 55 C-MicroUSB 2.0傳輸線 1 56 P-AI學習卡 1 57 C-智高智慧主控盒 1 58 C-18650雙用鋰電池座 1 59 B-扳手 1 序號 零件名稱 品號 數量 7061-W10-B1Y1206-W85-B1206-W85-AK16#1206E30#1247A1269-W85-B1G1269-W85-B1Y1269-W85-B1R1246-W85-C1247-W85-B37412-W85-A1247-W85-D1-17446-W10-C2D7446-W10-C1D7444-W10-A1B11247-W85-C1S7407-W10-A1D7407-W10-B1W7446-W10-A3B7446-W10-A2B7446-W10-A1B7443-W10-A1B7427-W10-F2B7427-W10-F1B7413-W10-J1W7413-W10-I1W7413-W10-Q1W7406-W10-A1W7413-W10-Z1W1 B-短結合鍵 10 2 C-栓扣鍵 20 3 C-20T齒輪 3 4 C-40T齒輪 2 5 C-60T齒輪 1 6 C-80T齒輪 1 7 C-27mm馬達短軸 2 8 C-30mmⅡ軸 2 9 C-35mmⅡ軸 4 10 C-70mmⅡ軸 2 11 C-100mmⅡ軸 2 12 C-145度齒輪曲軸-A 1 13 C-145度齒輪曲軸-B 1 14 C-6孔爪形長條 2 15 C-渦桿 2 16 C-軸轉接器 2 17 C-關節鍵 2 18 C-二合一結合鍵 2 19 C-2凸單孔轉向結合器 6 20 C-3孔1/4弧長條 2 21 C-3孔長條II 2 22 C-3孔超長條 2 23 C-5孔長條II 3 24 C-5孔長條側有孔 2 25 C-5孔超長條Ⅱ 2 26 C-3孔圓角長條 2 27 C-7孔圓角長條 2 28 C-7孔圓角扁長條 2 29 C-9孔長條 2 30 C-11孔長條 5 序號 零件名稱 品號 數量 7413-W10-P1B17407-W10-C1W7404-W10-C3W7404-W10-C2W7404-W10-C1W7413-W10-X1W7413-W10-R1W7413-W10-K2W7413-W10-Y1W7026-W10-Q2W7061-W10-V1W7430-W10-B1W7061-W10-G1W7061-W85-F1W7026-W10-L2W7344-W10-A1S17411-W10-G1D7411-W10-C2B7411-W10-C1B7413-W10-L2D7061-W10-Q1D7413-W10-O1D7413-W10-N1D7026-W10-L1W7328-W10-G2O7026-W10-W5S7346-W10-C1S7026-W10-D2S1187-W10-E1K7344-W10-C2D 這裡有幾點組裝模型的小技巧,請在組裝模型之前仔細地閱讀一遍。組裝技巧: 更多組裝小技巧,請參考 X《錯誤》未留空隙 輪掉落。(如上圖所示)。此外,傳動軸的凸緣必須墊後以免齒才能將摩擦減到最低而動力的傳輸效率提昇到最高零件與長方框之間保持適當的距離(約1輪、渦輪、鍊輪、凸輪、曲桿等所有智高可做力學傳動的用傳動軸把齒輪安裝在長方框上時一定要讓齒輪、滑O《正確》有留空隙mm),這樣 扳手的B端面來撬出自轉軸鍵。結合鍵;想要拆除自轉軸鍵時,你也可以使用手。操作扳手時,使用扳手的A端來拔除紅色當你想要將你的模型分解開來時,可使用扳 動的力量帶入到下一個齒輪。 齒輪嚙合得很好,否則就無法讓一個齒輪傳一排,為了讓模型可以順暢的運作,你必須將在模型建置中你常可以看到幾個齒輪組裝成 A.留意組裝長方架與齒輪的間距: B.扳手: C.齒輪組: 清單:找零件 - 檢查 - 核對





想想看 23 回應,像人類一樣思考、學習與解決問題。人工智慧將得到的數據去進行特徵分類訓練,最後經由判斷作出相對應的你主動揮手與迎賓機器人打招呼時,它也會與你大聲說「嗨!」。及導覽服務。將語音辦識、圖像識別和機電裝置系統集於機器人一身,因此當經在飯店或銀行…等場所見過服務型的機器人了。它們能提供迎賓、資訊查詢如今,機器人已經被廣泛應用於各個行業,從事著各種各樣的工作。或許你已標,使我們的生活更進步與便利。「機器人之父」約瑟夫•恩格爾伯格(Joseph全球第一台機器人出現於20世紀中期,由Engelberger)所發明,這項發明徹底改造了現代製造業。AlphaGo智能機器人打敗世界棋王時,帶給人類相當大的省思。「讓人工智慧解決特定問題」為人工智慧發展目機器人經由請試著說明在哪些場合看過服務機器人,及提供何種服務。 1 應用科學 人工智慧打招呼機器人 生活應用器人整合。使得機器人提供更提高服務品質。合多種感測器模仿人類的動作,搭配物聯網技術將機發展的趨勢為透過人工智慧及深度學習,配再只是裝著擴音器附有輪子的機器。未來人工智慧將改變服務機器人型態未來,不

24 零件清單 1 x8 2 x5 12 x1 13 x1 8 x2 17 x2 19 x1 25 x2 27 x2 30 x3 33 x3 55 x1 57 x1 58 x1 3 14 2 5 ×2 A. ×2 B. 49 x2 54 x2 36 x2 37 x1
























25 1 打招呼機器人 C. 768 A. A. C. 插C孔 插G孔 9 馬達 -B 馬達 -A









26 插B孔 插F孔 進下面的空間將電線整理好塞 B. 30mm 30mm DCBA DC 5V HGFE46039817燈座 -B 馬達 -B 燈座 -A 馬達 -A 燈座 -B 馬達 -B 燈座 -A 馬達 -A 10 11 12



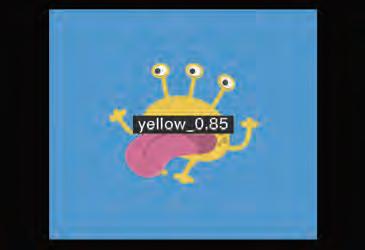
27 物件追蹤。它工具訓練,請先執行P11頁-訓練影像分類、本課使用包裝內附的小怪獸圖卡,若是使用其小提示2:像辨視模組檔案存入SD卡,並插入主控盒。執行程式前,請參考P10頁將各個音效檔及影小提示1: 1 打招呼機器人完成圖 程式範例 模型操作影片


28 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 卡中。)。呼。(請插入SD卡,可先行錄製WAV音源檔存入SD試試看,使打招呼機器人能提供不同語言版本的打招做做看,增加手勢使機器人能兩手舉起來打招呼。
想想看 29 2 樂趣多也可以養成生活中儲蓄的好習慣。對錢幣進行分類,模仿人類分類的概念。智慧分類機結合了許多的技術,不只個錢幣的資料輸入機器,觀察所提供的數據,找出規則決定特徵讓機器能自動科技的進步,讓世界上出現了各式各樣累積金錢的工具與設施。智慧分類機就是結合現代科技的應用,當放入錢幣時會立即自動偵測。有些還能搭配網頁或手機應用程式(APP),藉由網路上傳資料至資料庫,隨時隨地可進行金錢管理。本課的智慧分類機如何判別幣值呢?將各蔬菜能用哪些特徵來進行分類,請試著舉例。 應用科學 特徵分類智慧分類機 生活應用能依髮型、衣著及身體姿態去辨識身份。同的臉孔圖片,最後輸出各分類結果。發展至今,模糊臉部的照片也依據演算法來取得臉部的特徵,在依此來計算與匹配不術運用了龐大已被標記過的圖片,來訓練人工智慧,動建議該朋友的名字提供標籤選項。這項技至社群網站時,它會很聰明的在照片裡自是否有類似以下的經驗,當我們上傳照片


30 零件清單 1 x10 2 x18 8 x2 9 x1 19 x4 20 x2 22 x2 23 x2 24 x1 25 x2 27 x2 28 x2 29 x2 30 x3 32 x1 33 x4 34 x4 45 x2 52 x1 55 x1 57 x1 58 x1 3 4 1 2 7 8 5 6 A. B. C. 54 x1 48 x1






















31 2 智慧分類機 9 10 13 14 11 12 E. D.








32 DCBA DC 5V HGFE46039817 46039817 15 18 1617 插F孔 插B孔 燈座 -A 燈座 -B 燈座 -A 燈座 -B 角度馬達 角度馬達 A. B. C. E. D.




33 2 完成圖 智慧分類機 練,請先執行P11頁-訓練影像分類、物件追蹤。本課使用包裝內附的錢幣圖卡,若是使用其它工具訓小提示2:並輸入模型名稱(2.1)。完成後請於「設定模型」積木,點選「新增SD卡模型」模組檔案存入SD卡,並插入主控盒。執行程式前,請參考P10頁將各個音效檔及影像辨視小提示1:程式範例 模型操作影片


34 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 分類。試試看,辨識不同樣式的積木,讓智慧分類機將積木類出何者為錢幣或鈔票。做做看,製作錢幣與鈔票圖卡,試著讓智慧分類機分
想想看 35 3 少必須有兩個紅外線模組才能做到方向的辨識。的顏色,藉此辨別目前的路徑是否正確。為了要讓自走車行駛的更穩定,至器發射訊號出去,再經由紅外線受光電晶體感測反射光的強弱來判定感應到向的呢?感測器在自走車中扮演「耳目」這個重要的角色。透過紅外線發射但是循跡無人車又是如何得知路徑與方動化工廠內穿梭,協助物件與包裹傳送。除了太空探索之外,也常見自走車於自回火星地表照片。壤,是否曾經有生命跡象,且不斷的傳車的任務為人類收集火星地表的岩石土為人知曉的就是火星探測車。火星探測自走車的開發技術與應用廣泛,其中最還能運用循機無人車幫我們完成哪些事情呢? 應用科學 紅外線感應循跡無人車 生活應用助工具。體溫,也應用於機電保養的檢測判斷、醫療與火場態勢判斷的輔顏色,會因物體散熱的溫度不同有所區別。除了檢測外線光譜成像,用來檢測體溫。熱感應圖上的顯像黃色、藍色的熱感圖,這項技術是運用紅台顯示器上,看到自己的投影變為紅色、紅外線感應用無所不在。時常我們在一


36 零件清單 1 x8 2 x10 3 x2 4 x2 7 x2 8 x2 17 x2 22 x2 23 x1 29 x1 30 x2 27 x1 33 x2 35 x1 38 x1 43 x2 42 x2 44 x1 50 x2 55 x1 57 x1 58 x1 3 4 1 2 7 856 9 ×2 A. B. A. A. A. 感應器在同一方向 B. 49 x2 36 x2









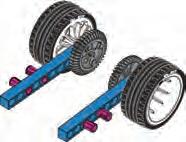
















完成圖 37 3 循跡無人車 小提示2。請參考P10頁程式範例 DCBA DC 5V HGFE46039817 46039817 馬達 -A 馬達 -B IR 感測 A IR 感測 B 馬達 -A 馬達 -B IR 感測 BIR 感測 B 10 馬達 -A 馬達 -B IR 感測 A IR 感測 B 馬達 -B 程式範例 模型操作影片 馬達 -A



38 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 車有何影響?試試看,改變路徑的粗細,觀察與紀錄對循跡無人徑行走。做做看,在地上設計路線,讓循跡無人車沿著路
想想看 39 4 果。的感測器,例如路燈的定時器訊號提醒,或將訊號輸出後使機器執行給予的工作任務。同時也能搭配額外裝置的身影。定時裝置是一種測量時間間隔的特殊裝置,在特地時間會發出用品、競賽活動及料理配件等都能看見定時定時器則是計時器的延伸應用。生活中的電器式與計時方式也愈來愈多元。械鐘和電子錶陸續出現,計時越來越準確,樣境因素影響的計時工具。隨著科技的進步,機明了日晷。進而發明水鐘、沙漏及其他不受環象來判斷時間,利用太陽陰影的長度或角度發在沒有鐘錶的時代,人們觀察自然界的種種現可以設定在天暗時透過光感測器點亮路燈的效定時器的發明對生活有何影響?日常生活中還能看到定時器應用在何處? 應用科學 定時裝置定時器 生活應用滿滿的早晨。有防貪睡型、特色鈴聲型及睡眠週期偵測型等,迎來元氣近年來也發展出根據自己的需求來設定鬧鈴的方式,長久,在特地時間會發出訊號喚醒睡著的人。間隔的特殊裝置,只是設定的間隔時間較鬧鐘也是定時裝置的一種,用來測量時間


40 零件清單 2 x10 3 x2 4 x2 7 x2 22 x2 23 x2 30 x2 33 x2 55 x1 57 x1 58 x1 3 4 1 2 7 8 5 6 9 20齒 21齒 20齒履帶 x2 21齒履帶 x1 連接履帶小技巧 35mm35mm A. B. A. B. 35mm 35mm 9 x4 19 x4 32 x2 45 x4 46 x4 47 x2 20齒履帶 x2 21齒履帶 x1 49 x2















完成圖 41 4 定時器 10 請先執行P11頁-訓練影像分類、物件追蹤。本課使用包裝內附的小怪獸圖卡,若是使用其它工具訓練,小提示2:檔案存入SD卡,並插入主控盒。執行程式前,請參考P10頁將各個音效檔及影像辨視模組小提示1: DCBA DC 5V HGFE46039817 馬達 -A 馬達 -A 馬達 -B 馬達 -B 程式範例 模型操作影片 馬達 -B 馬達 -A



42 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 試試看,更改與重新設計關閉定時器的方式。中。)(請插入SD卡,可先行錄製WAV音源檔存入SD卡做做看,利用程式為定時器增加不同的聲響或音樂。
43 回顧模型 5 專題製作 1 換燈號的智慧紅綠燈。請利用學過的模型與原理,製作一台當偵測到老人時會變 1. 迎賓機器人 3. 循跡無人車 2. 智慧存錢筒 4. 定時器




44 2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計規劃 我的作品照
行其對應的指令!本課程我們將應用智高智慧主控盒的鏡頭,讓模型讀取QR變化。在條碼中放入圖像都不會影響資訊讀取。這也讓QR一定程度範圍內的資訊流失,因此只要三個回狀定位標記存在,就算缺角、或是定位標記。傳統一維條碼只要圖像有損傷,就難以辨識,不過QR儲存大量的資料。結構之中,最重要的就是位於上方兩側與左下的3個「回」狀QR的原理。code由無數個黑白小格子組成,通過黑白格子不同排列組合來表達資訊,可Code可以容許Code在設計上有非常多的code後執 6 如果沒有條碼的發明,會造成人們什麼樣的困擾呢? 應用科學 條碼掃碼卸貨車 生活應用查詢對應的產品資訊。接受反射的訊號,便能讀取此條碼的黑白區塊,並藉此來由黑色會吸收光、白色會反射光的原理,用光感應器去白條紋,而利用掃描器的雷射光照射條碼,經維條碼與二維條碼,一維條碼是橫向的黑我們日常生活中的條碼可以分為兩類:一
想想看 45
子票券搭乘交通工具,今天我們就來探討二維條碼品的背景資訊,也能訂購電影票,甚至可以下載電可見,拿起照相手機對二維條碼掃一下,可出現展覽例,都以正方形呈現,其中QR其實每個條碼都有自己的編碼規則,以二維條碼為code如今已是隨處


46 零件清單 1 x6 2 x18 8 x2 19 x4 22 x1 23 x2 27 x2 28 x2 29 x2 30 x5 32 x2 34 x1 55 x1 57 x1 58 x1 10 x1 18 x2 43 x2 42 x2 44 x1 48 x1 49 x2 34 1 2 7 5 6 ×2 30mm 36 x2









47 6 掃碼卸貨車 DCBA DC 5V HGFE46039817 46039817 8 9 1110 角度馬達 馬達 -A 馬達 -B 馬達 -A 馬達 -B 馬達 -A 馬達 -B





48 131214 15 16 70mm 角度馬達 DCBA DC 5V HGFE46039817 46039817 角度馬達 馬達 -A 馬達 -B





49 6 掃碼卸貨車 程式範例 完成圖 模型操作影片


50 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 試試看,改變車子的造型,創作獨特的掃碼卸貨車。作。做做看,利用掃描條碼讓車子做出更多不同的指令動
想想看 51 7 的環節。比收銀員結帳還花更多時間。另外因較少人監督,防止盜竊也是店家需要考量少顧客等待時間,給予顧客更多隱私。但顧客未經訓練,不熟悉機器操作,可能與傳統人力結帳櫃台相比,疏散排隊人潮減核對結帳。上顯示出價格、重量等產品資料,以便顧客果,透過秤重器,自助結帳系統亦會在螢幕可完成結帳動作。像是無條碼類的蔬菜水上,按下自助結帳按鍵、掃描商品條碼,即為不可或缺的幫手。由顧客將商品放在機器為了結省人力與時間成本,智慧結帳櫃台成日常生活中還有哪些影像辨識的例子。 應用科學 影像辦識智慧結帳櫃台 生活應用費體驗。品名稱及數量,並加總金額輕鬆完成結帳,還能提升消顧客只需拿著商品經由系統掃描辨識,就能辨識出商工智慧與機器學習,結合影像圖片辨視系統。人商店,無需掃描商品條碼,而是透過人近年來開發出AI影像辨識結帳系統-無


52 零件清單 1 x6 2 x19 19 x4 24 x1 27 x2 29 x2 30 x4 33 x2 34 x2 51 x1 52 x1 55 x1 57 x1 58 x1 3 41 2 7 8 56 9 10 A. B. C. ×2 ×2 ×2 A. C. A. B. 54 x1 36 x2














DCBA DC 5V HGFE46039817 程式範例 完成圖 53 7 智慧結帳櫃台 訓練影像分類、物件追蹤。使用其它工具訓練,請先執行P11頁-本課使用包裝內附的物件圖卡,若是小提示2:並輸入模型名稱(14.1)。型」積木,點選「新增SD卡模型」並插入主控盒。完成後請於「設定模效檔及影像辨視模組檔案存入SD卡,執行程式前,請參考P10頁將各個音小提示1:燈座綠燈座 紅 按壓開關 燈座 綠燈座 紅 按壓開關 11 模型操作影片



54 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 帳作業。試試看,將智慧結帳櫃台模型增加輸送帶來處理結做做看,掃描五項產品觀察結帳加總金額是否正確。
想想看 55 8 使用多重身分驗證來克服此問題。斷錯誤及提高安全性,除了結合3D影像技術之外,有時還會配合指紋辨識,或警報輸出。然而照片是否能取代人的臉,考倒人臉識別門禁呢?為了避免判員工代替他人打卡的問題,可以有效掌握員工的出勤狀況。還可觸發迎賓系統人臉識別門禁即是其一的應用,員工們可以使用臉部辨識來打卡,同時也減少科技使生活能夠不斷的進步和改善,似乎也讓我們宛如生活在科技電影裡。你一定有看過使用人臉辨識或其他身分鑑定技術的科幻電影。人臉辨識技術已真實應用在我們的生活中,是人工智慧範疇裡面的重要應用,並透過深度學習演算法,歸納出其關聯進行分析及辨識。手機平板內的照片人物分類,是以何種方式來判別的呢? 應用科學 臉部辨識人臉識別門禁 生活應用兼顧,則是我們所要好好思考與努力的。私權的爭議,要如何在隱私權與帶給民眾的效益,便利、安全之間可以隊的時間順利出國。然而,生物特徵建檔至今仍有許多隱識成功,短短的十幾秒則可以通過海關,省去了等待排集臉部特徵辨識身分,只要對著機器,臉部辨過海關的經驗。而自動通關服務,主要採一般旅客出國不難遇到要大排長龍,等著

56 零件清單 1 x6 2 x18 3 x1 10 x1 8 x2 19 x5 22 x1 23 x1 25 x2 26 x1 27 x2 28 x2 29 x2 30 x2 32 x2 33 x2 34 x3 35 x1 52 x1 55 x1 57 x1 58 x1 31 x1 3 4 1 2 7 5 6 A. B. 48 x1 54 x1 36 x2










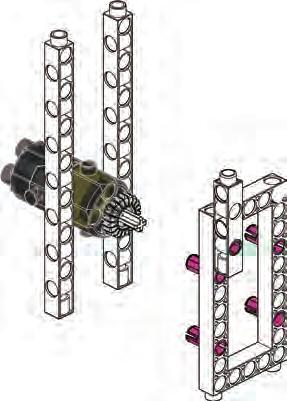
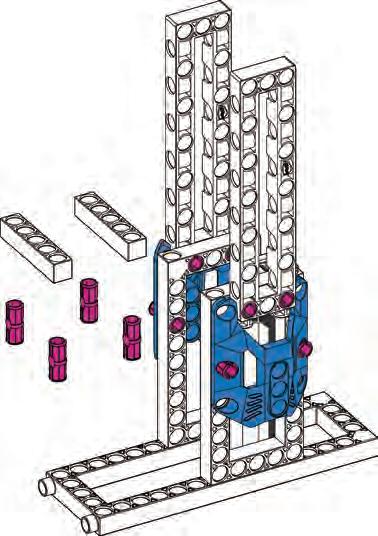
57 8 人臉識別門禁 8 13 14 11 12 D. 70mm 30mm30mm C. 9 10 C.









58 DCBA DC 5V HGFE46039817 46039817 15 18 16 17 A. B. 角度馬達 燈座 綠 燈座 紅 角度馬達 燈座 綠 燈座 紅




完成圖 59 8 人臉識別門禁 燈座 綠 燈座 紅 程式範例 模型操作影片 角度馬達 頁-訓練影像分類、物件追蹤。是使用其它工具訓練,請先執行P11本課使用包裝內附的小怪獸圖卡,若小提示1:


60 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 插入SD卡,可先行錄製WAV音源檔存入SD卡中。)試試看,修改程式讓模型開門時發出迎賓歡迎詞。(請功?做做看,改變臉部表情,測試人臉識別門禁能否偵測成
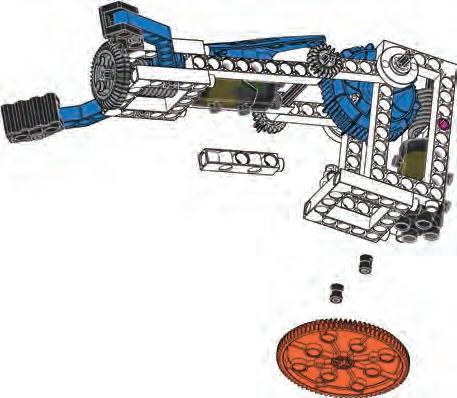
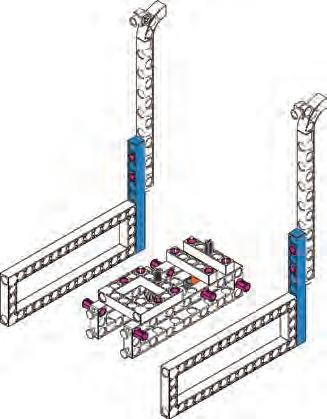
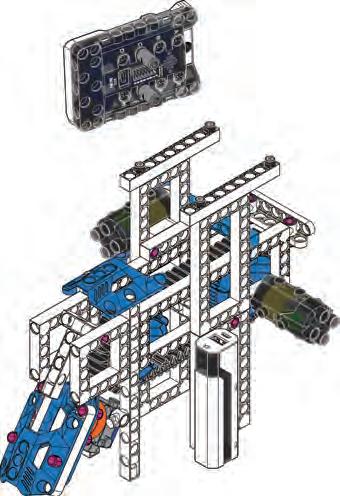
想想看 61 9 與無人工廠的高效率工業成果。溝通協作,自動排除各種問題,透過機器之間的相互溝通,才能成就熄燈工廠經過程式的控制之後,它可以做到各種運動與位移,不同的手臂之間還能進行動化設備裡的比重將會愈來愈高。由主體架構及馬達,搭配各種傳感器組成,優化製造流程的方法。而機械手臂是智能工廠內不可或缺的一部份,在現場自科技大大改變工作,目前程式已經切入各行各業,包含金融、法律、醫療...各行各業都在進行「自動化」以取代基層人力。因此智能製造和智能工廠也成為了邁向工業4.0的兩大主要目標。何謂智能工廠?將工廠內的各式設備自動化連結在一起形成一個網路,智慧化技術智慧工廠的優缺點?對我們未來的生活有何影響? 應用科學 工業機器人圖標機械手 生活應用的需求。況下。並且由一台電腦集中控制,接收、查詢或儲存專案接等功能,被應用在危險的工作與重複瑣碎的任務情這些機器人能夠抓取、鎖緊、鑽孔、油漆、焊斷增加,被用來緩解工廠工人的工作量。在自動化工廠裡,能看到機器人的數量不


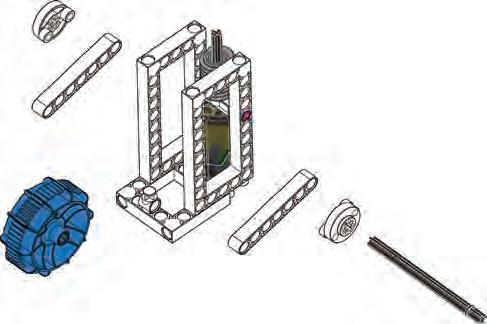
62 零件清單 1 x10 2 x19 3 x3 4 x2 6 x1 10 x2 8 x2 9 x4 11 x2 12 x1 13 x1 14 x2 15 x2 16 x2 17 x2 19 x6 20 x2 22 x1 23 x2 25 x1 27 x2 28 x2 29 x2 30 x2 31 x2 32 x2 33 x4 34 x2 35 x2 36 x1 39 x1 45 x1 49 x2 48 x1 55 x1 57 x1 58 x1 3 41 2 7 8 5 6 9 A. B. A. B. C.二邊的夾臂先放置於內側扳開套入上視圖 2 1 轉動中齒輪, 往前移動並且爪子互相碰觸嚙合測試夾臂是否可以同時 40T 齒輪 70mm 30mm30mm 扳開套入




















63 9 圖標機械手 10 1314 11 12 15 16 17 70mm 35mm35mm 100mm ×2 100mm 35mm F. ×2 D. D. E. G. C.










64 DCBA DC 5V HGFE46039817 46039817 18 19 20 21 23 22 2524 F. G. F. E. 馬達 -B 馬達 -A 角度馬達 馬達 -B 馬達 -A 角度馬達








65 9 圖標機械手 馬達 -B 馬達 -A 程式範例角度馬達 完成圖 模型操作影片 追蹤。行P11頁-訓練影像分類、物件若是使用其它工具訓練,請先執本課使用包裝內附的物件圖卡,小提示2:名稱(9.1)。「新增SD卡模型」並輸入模型後請於「設定模型」積木,點選入SD卡,並插入主控盒。完成個音效檔及影像辨視模組檔案存執行程式前,請參考P10頁將各小提示1:


66 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 物品。試試看,將機械手增加輪子,使模型可以移動夾取做做看,增加圖像讓機械手做出不一樣的動作。
67 回顧模型 10 專題製作 2 種不同的動作的機器人。請利用學過的模型與原理,製作一台可依提供的指令而做出各 6. 掃碼卸貨車 8. 人臉識別門禁 7. 智慧結帳櫃台 9. 語音聲控裝置




68 2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計規劃 我的作品照
想想看 69 11 測器是如何運作的喔!外的人力成本。大家下次進去百貨公司時可以多加觀察,看看他們的人流偵記錄於記憶體中,並搭配定時系統達成全自動化,如此一來就不用再耗費額等。因此人們開發了人流偵測器,透過紅外線感測的方式,將進出人員立即當然這樣的人力手動計數方式有許多缺點,包括:計數員疲乏或是誤算人數的。的人員,以達到紀錄與人流控管的目位人流計數員,負責計算每一個來訪器。其實他並不是什麼怪人,而是一一個人經過時他便會按下那個按壓有一個人手拿著一個按壓器,每當有在車站、展覽或大型活動中,時常會生活中有什麼物品應用了計數的概念? 應用科學 計數人流偵測器 生活應用型便會發出音效與作動,而這個人便是中獎的幸運兒!來店第100個客人有獎,因此當計算到指定數值時,模數功能外,本課程的模型還可以設定一個數值,例如:目,也就是口語中的「數數」。除了一般的計常用於算出物件有多少個或達到想要的數計數,是重複加(或減)一的數學行為,通

70 零件清單 1 x4 2 x4 3 x1 10 x2 8 x2 12 x1 13 x1 15 x1 16 x2 17 x2 19 x4 20 x2 23 x1 25 x2 27 x1 33 x3 55 x1 57 x1 58 x1 3 4 1 2 5 6 70mm 然後將紙條捲起來紙條用膠帶固定在長軸上, A. B. 290 x60mm 49 x1 36 x1 37 x1








71 11 人流偵測器 7 8 9 10 C. B. 二邊的夾臂先放置內側上視圖 2 1 轉動20T齒輪, 以同時往前移動並且互相碰觸。測試夾臂是否可 20T齒輪 70mm 30mm30mm 夾住兩邊 夾住兩邊








72 DCBA DC 5V HGFE46039817 11 12 13 馬達 A. C. 2 1 2 1 馬達



73 11 人流偵測器 程式範例 完成圖 模型操作影片 物件追蹤。它工具訓練,請先執行P11頁-訓練影像分類、本課使用包裝內附的小怪獸圖卡,若是使用其小提示1: 馬達


74 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 數之外還會讓燈泡亮一下。試試看,改造模型增加燈泡後,每當人經過時除了計「Congratulations」。做做看,當人流偵測器偵測第10位人時,於螢幕上顯示
學生的問題;也可以應用在各種社交軟體中,達到行銷與客服的功能!聊天機器人的用途非常廣泛,在教育領域中可以應用聊天機器人,快速地回覆鍵字,再從資料庫中找尋最合適的應答句,能提供人們最立即的回饋。行交談的電腦程式,能夠模擬人類對話。大多的聊天機器人會擷取輸入的關聊天機器人(Chatbot)是經由對話或文字進對話的機器人我們又稱作-聊天機器人。更能與人們交談自如,而這種能夠模擬人類些機器人不僅能代替人類完成勞力的工作,進步,人們真的開發出了許多智能機器人,這與機器人互動甚至是聊天。如今隨著科技的從第一個機器人問世以來,人們總希望可以
醫療和教育等。再限於智慧手機的應用,而是跨及不同產業,包括:汽車、虛擬助理便是蘋果手機的Siri,現在虛擬助理技術不個人執行任務或服務的軟體。其中最有名的虛擬助理(virtual在日常生活中.最常見的聊天機器人便是assistant),是一種能替
想想看 75
12 未來機器人還會發展出什麼功能呢? 應用科學 聊天機器人自動應答機器人 生活應用

76 零件清單 1 x4 2 x11 12 x1 13 x1 17 x2 20 x1 23 x1 27 x2 29 x2 32 x2 33 x1 39 x1 55 x1 57 x1 58 x1 DCBA DC 5V HGFE46039817 46039817 3 4 1 2 7 5 6 A. A. 燈座 -B 燈座 -A 馬達角度 48 x1 54 x2 燈座 -B 燈座 -A








程式範例 完成圖 77 12 自動應答機器人 空間裏將電線塞進 8 模型操作影片 主控盒。存入SD卡,並插入及影像辨視模組檔案P10頁將各個音效檔執行程式前,請參考小提示1:



78 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 (請先插入SD卡進行動手做創意。)試試看,改造自動應答機器人,當回話時能揮揮手。聲音有何變化。(請先插入SD卡進行動手玩實驗。)做做看,改變說話聲音的音調,觀察自動應答機器人
想想看 79 13 受到寵物帶來的陪伴感。們,例如:過敏、空間不足、經濟能力有限等,讓人們在單獨行動時,仍然能感你一起奔跑。這類的機器人設計,幫助了許多因環境因素而無法飼養寵物的人尾巴;當你開始奔跑時,寵物機器人也會跟著摸寵物機器人,它會像真的小狗一樣開始的搖們的動作並做出相對應的回應,例如:當你撫寵物機器人透過人工智慧技術,能夠探測人不輕鬆。於是寵物機器人誕生了。己,但是飼養寵物必須承擔許多責任,似乎也要的課題。進而人們開始飼養寵物來陪伴自越忙碌,因此如何適時地放鬆自己成為一個重隨著時代的發展,人們的生活型態變得越來如果有一個自己的寵物機器人,你會希望它是什麼動物呢?為什麼? 應用科學 仿生獸寵物跟隨模式 生活應用了解動物的運作原理,從而將此原理應用在新的科學上。構─仿生獸(Strandbeest)。透過這種仿生獸的設計,可以讓人們更行走姿態,透過精密的計算,創造出能自己行走的大型機於荷蘭藝術家Theo類問題的相關科學設備。最有名的例子莫過的功能,從而誕生了仿生學,製作可解決人人們藉由觀察並模仿大自然中動物或植物Jansen,他藉由觀察動物四肢

80 零件清單 1 x10 2 x9 3 x2 4 x2 7 x2 8 x2 17 x2 19 x2 20 x2 22 x1 23 x1 25 x2 27 x2 29 x2 30 x3 33 x1 38 x1 39 x1 40 x1 43 x2 42 x2 41 x1 44 x1 55 x1 57 x1 58 x1 3 4 1 2 5 6 A. B. C. ×2 ×2 ×2×2 B. B. B. ×2 2 130mm 49 x2 54 x2 36 x3












81 13 寵物跟隨模式 7 8 9 10 D. A. A. C.





82 DCBA DC 5V HGFE46039817 13 11 12 14 燈座 -B 馬達 -B 燈座 -A 馬達 -A 燈座 -B 馬達 -B 燈座 -A 馬達 -A




程式範例 完成圖 83 13 寵物跟隨模式 小提示2。請參考P10頁程式範例 模型操作影片 訓練影像分類、物件追蹤。使用其它工具訓練,請先執行P11頁-本課使用包裝內附的小怪獸圖卡,若是小提示1:


84 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 動。試試看,創作模型讓寵物機器人以循跡的方式移能一閃一閃的閃爍。做做看,設計程式當寵物機器人於跟隨狀態時,眼睛
想想看 85 14 是現在每一個人們都必備的觀念。的垃圾遺棄,資源回收可以節省資源、降低溫室氣體排放,藉此減少環境汙染,透過廢棄物的分類,將本來要廢棄的材料,分解再製成新產品。相對於「傳統」由於並非所有的廢棄物都可以分解處理,因此資源回收顯得格外重要,我們機構,其中最重要的便是資源回收。概念逐漸抬頭,人們開始制定環保政策與相關們唯一的地球,自二十世紀開始,永續環保的導致了生態環境破壞與地球暖化。為了保護我棄物的處理,以致於疾病的增生,長遠下來更也產生了許多廢棄物。起初人們並沒有重視廢分便利的物品,追求更加便利的生活,但同時自十八世紀工業革命以來,人們創造出許多十想想看,還有哪些方法可以落實環保概念? 應用科學 資源回收資源回收裝置 生活應用做好資源回收,不要讓資源白白浪費掉!腳踏車,長途時可搭乘大眾運輸工具,以及最重要的手關燈關水,減少能源的浪費;多走路或騎使用免洗餐具,以自備環保餐具為主;隨為了落實永續環保,我們應該:盡量避免

86 零件清單 1 x8 2 x18 10 x2 9 x1 16 x1 19 x4 22 x2 23 x1 25 x1 26 x1 27 x2 28 x2 29 x2 30 x1 31 x2 33 x2 34 x4 35 x2 45 x2 49 x2 48 x1 47 x3 55 x1 57 x1 58 x1 3 4 1 2 5 6 A. B. C. 28 28 27 27 36 x3









87 14 資源回收裝置 7 8 9 10 13 1112 35mm D. E. 70mm 70mm 21齒 21齒履帶 x3 連接履帶小技巧 F.












DCBA DC 5V HGFE46039817 46039817 88 14 15 161817 A. B. C. E. F. D. 馬達 -B 馬達 -A 馬達馬達角度 -B 馬達 -A 角度馬達





程式範例 89 14 資源回收裝置 完成圖 模型操作影片 馬達 -B 馬達 -A 角度馬達 練影像分類、物件追蹤。用其它工具訓練,請先執行P11頁-訓本課使用包裝內附的物件圖卡,若是使小提示2:模型名稱(14.1)。積木,點選「新增SD卡模型」並輸入插入主控盒。完成後請於「設定模型」檔及影像辨視模組檔案存入SD卡,並執行程式前,請參考P10頁將各個音效小提示1:


90 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 發出燈光提示。試試看,增加燈光效果讓資源回收裝置分類完成時做做看,收集生活中的物品圖形進行形狀的分類。
91 回顧模型 15 專題製作 3 的自動追蹤攝影機。請利用學過的模型與原理,製作一台可定點鏡頭,並跟隨拍攝 11. 人流偵測機 13. 寵物跟隨模式 12. 自動應答機器人 14. 垃圾分類裝置




92 2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計規劃 我的作品照
想想看 93 16 不再寂寞。定的時間進食;或是提供錄音的功能,讓家裡的毛小孩能聽到飼主的聲音而物食用。有些寵物餵食器甚至能讓飼主事先設定好時間與份量,讓寵物能在固寵物是人類最忠心的夥伴,它們總是無時無刻陪伴著你,因此越來越多人開始飼養寵物。然而,人們並不能無時無刻照顧著寵物,那麼當我們要外出時,應該由誰來替寵物餵食呢?為了解決這個問題,人們研發了寵物餵食器,它能讓飼主透過遠端遙控的方式,控制餵食器發放食物或水給寵Wi-Fi的用途非常廣泛,請例舉Wi-Fi在生活中的應用 應用科學 WI-FI 控制寵物餵食器 生活應用 Wi-Fi(Wireless 到訊息時,便會進行解碼,解碼完成後在執行所輸入的指令。是將遙控器的訊息編碼後以Wi-Fi傳輸,當接收器收無線方式互相連接的技術。而Wi-Fi遙控就個人電腦、手持設備(如手機)Fidelity),是一種可以將等終端以

94 零件清單 1 x7 2 x20 3 x3 10 x1 9 x2 17 x2 18 x2 19 x4 20 x2 23 x2 27 x2 28 x1 29 x1 30 x5 32 x2 33 x4 34 x4 35 x1 55 x1 57 x1 58 x1 5 x1 3 4 1 2 7 5 6 70mm ×2 48 x1 36 x2








95 16 寵物餵食器 8 9 10 13 14 11 12 35mm 35mm








96 DCBA DC 5V HGFE46039817 46039817 15 16 17 角度馬達 角度馬達 角度馬達



程式範例 完成圖 97 16 寵物餵食器 模型操作影片 將栓扣鍵放進飼料管內, 本課使用包裝內附的物件圖卡,若是使用其它工具訓練,請先執行P11頁-訓練影像分類、物件追蹤。小提示2:並輸入模型名稱(16)。請於「設定模型」積木,點選「新增SD卡模型」辨視模組檔案存入SD卡,並插入主控盒。完成後執行程式前,請參考P10頁將各個音效檔及影像小提示1:物體時,栓扣鍵(飼料)會自動滾動出來。當攝像機偵測到



98 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 料。試試看,設計程式讓寵物餵食器能給予不同份量的飼如何設計呢?做做看,當家裡有兩隻寵物時,寵物餵食器的程式該
想想看 99 17 展的趨勢之一。安全又便利的居住環境外,還能節省各種能源費用,如今已成為人工智慧發過網路、聲控或是平板等方式遠端控制家中的所有智慧家電,除了提供舒適、居住功能外,更透過物聯網增加了網絡通信與設備自動化等功能,讓我們透與傳統的家居相比,智能家居除了有實在現實生活中已經逐漸在實現了!使用狀況。這些看似科幻的情節,其平板或電腦,能隨時觀察每個家電的所有的家具開關,並且都會配備一個需要人們大喊一聲,便能開啟或關閉可以看到高科技的房屋,這些房屋只在許多未來科幻電影中,我們總是請列舉出物聯網的優缺點。 應用科學 物聯網物聯網智能居家 生活應用 物聯網(Internet of 裝置),如此一來人們就不會等到裝置完全故障後才意識到。自動回報錯誤,並立即採取行動解決問題(訂購替換零件或全新用途非常有效率,例如:配備物聯網功能的裝置都可以力,無需人與人、或是人與裝置的互動。物聯網的聯的系統,並具有通過網路傳輸數據的能IoT)是一種將裝置、機械、物品相互關Things,簡稱


100 零件清單 31 x2 32 x2 33 x3 34 x4 35 x1 49 x1 48 x1 51 x1 55 x1 57 x1 58 x1 1 x9 2 x11 3 x1 7 x1 17 x2 19 x1 20 x2 22 x1 25 x1 27 x1 29 x1 34 1 2 5 6 27mm 53 x1 36 x2







17 物聯網智能居家 9 10 13 11 12 7 8






102 DCBA DC 5V HGFE46039817 46039817 14 15 16 角度馬達按壓開關燈座馬達黃 按壓開關燈座馬達黃 達角度馬 馬達 燈座 黃 按壓開關 角度馬達



程式範例 完成圖 103 17 物聯網智能居家 訓練影像分類、物件追蹤。使用其它工具訓練,請先執行P11頁-本課使用包裝內附的小怪獸圖卡,若是小提示1: 小提示2。請參考P10頁程式範例 模型操作影片


104 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 器依序啟動。試試看,設計程式當模型的門打開時,家中所有電做做看,設計程式讓當家中其他成員也能進入家門。
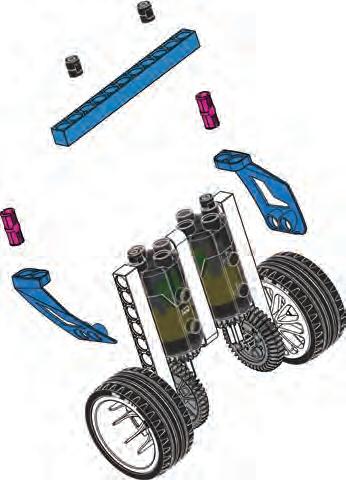
想想看 105 18 未來我們一定能看到更多無人駕駛的公共運輸。全的新選擇。雖然無人公車的發展尚未完善,但相信隨著經驗與技術的累積,通號誌,並透過系統設備輔助無人公車的行動與決策,提供晚歸民眾一個安間運輸的問題,因此開發無人載具創新計劃。這個無人公車能精準的識別交每當深夜時分,昏暗的環境總是潛伏著各種危險,因此如何安全的回家常是人們擔憂的問題。我們都知道公共運輸是最安全的選擇,但由於是人力駕駛所以不能提供24小時的服務,既然如此何不創造一台會自動駕駛的公車呢?為了解決公共運輸駕駛人力不足與缺乏夜請列舉自動駕駛的優缺點。 應用科學 自動駕駛無人公車 生活應用力,但有時也會因為判定失靈而導致意外,因此至今仍未完全普及。甚至擁有定速或自動剎車的功能。雖然自動駕駛可以有效減輕交通壓環境或交通號誌,並將感測資料轉換成適當的導航道路,自動駕駛汽車能以雷達、光學雷達、GPS等技術感測自動化駕駛,常用在飛機、船艦與火車上。而子儀器、系統或陀螺儀等,做出無人操控的自動駕駛(Autopilot)是一種經由機械、電


106 零件清單 1 x10 2 x6 3 x2 4 x2 7 x2 8 x2 19 x2 22 x1 23 x1 25 x2 30 x2 31 x2 33 x4 34 x1 38 x1 43 x2 42 x2 44 x1 51 x1 50 x2 55 x1 57 x1 58 x1 34 1 2 5 ×2 27mm 27mm 30mm 49 x2 36 x2





107 18 無人公車 876 9 10






108 DCBA DC 5V HGFE46039817 460398171112 馬達 -B 按壓開關 IR 感測 A 馬達 -AIR 感測 B 馬達 -A IR 感測 B 馬達 -B 按壓開關 IR 感測IRA 感測 A IR 感測 B 馬達 -A按壓開關馬達 -B ×2



程式範例 完成圖 109 18 無人公車 影像分類、物件追蹤。先執行P11頁-訓練用其它工具訓練,請小怪獸圖卡,若是使本課使用包裝內附的小提示1: 模型操作影片


110 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 插入SD卡,可先行錄製WAV音源檔存入SD卡中。)試試看,設計程式當模型到站時,能發出站名廣播。(請做做看,試著增加站牌數量讓無人公車即時停靠載客。
AI的處理,讓AI能更快速的處理大量數據。算並降低維護成本。而雲端AI是指在雲端數據中心進行路分散給不同的伺服器執行,如此便能更有效率的運此人們提出了雲端的概念,將運算工作透過網電腦的作業系統已無法有效率的處理,因隨著網際網路規模與資訊量的擴大,傳統
想想看 111 19 分辨照片與真人的爭議,因此目前仍尚未完全普及。雖然人臉辨識有諸多便利的優點,但同時也存在隱私權、人臉狀況改變或無法康狀況;或是設置黑名單,防止可疑人士進出。點名系統能杜絕他人代點名的行為,有些系統甚至能檢測體溫,確保人員的健當提到AI時,我們常講述AI在機器人、網路與生活物品的應用,那麼AI在企業中又會有什麼應用呢?其實目前已經有許多企業開始使用人臉辨識點名系統,使用者只需要面對鏡頭,AI系統就會透過雲端的資料庫進行身分比對,以此來完成點名與進出。相較於傳統的打卡點名,人臉辨識想想看,雲端服務有什麼優缺點呢? 應用科學 雲端 AI人臉辨識點名系統 生活應用






112 零件清單 1 x10 2 x16 23 x2 25 x2 30 x1 32 x2 34 x2 35 x1 38 x1 51 x1 50 x1 55 x1 57 x1 58 x1 3 4 1 2 ×2 ×2 36 x2 37 x1





113 19 人臉辨識點名系統 7 8 5 6 9 10





114 DCBA DC 5V HGFE46039817 46039817 11 12 13 按壓開關 IR 感測 按壓開關 IR 感測 IR 感測



程式範例 完成圖 115 19 人臉辨識點名系統 訓練,請先執行P11頁-訓練影像分類、物件追蹤。本課使用包裝內附的小怪獸圖卡,若是使用其它工具小提示1: 模型操作影片 小提示2。請參考P10頁程式範例


116 1 2 3 組裝完成 實驗完成 創作完成 自我評量 玩實驗動手 玩創意動手 Smart Manual 網頁版 螢幕顯示試試看,設計程式讓模型能禁止特定人士進入,且於做做看,設計程式當模型辨別出席人員時亮燈。 X 符號。
117 回顧模型 20 專題製作 4 示車位已滿。行,當停車位已停車時燈暗,無如停車時燈亮,如車位已停滿即顯請利用學過的模型與原理,設計一個停車場,能辨識車子開放通 16. 寵物餵食器 18. 無人公車 17. 物聯網智能居家 19. 人臉辨識點名系統




118 2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計規劃 我的作品照
MADE IN TAIWAN 本期內容之著作權,依法由智高實業股份有限公司享有 未經正式書面授權.禁止轉貼節錄 © 智高實業股份有限公司 2022 - ALL RIGHTS RESERVED R21#1206-CN-1