10 minute read
Brückeninspektion 4.0
Next Article

Pilotprojekt Falkensteinbrücke Brückeninspektion 4.0
von Peter Furtner, Albrecht Karlusch
Ingenieurbauwerke und damit Kunstbauten haben Anforderungen hinsichtlich Standsicherheit, Verkehrssicherheit und Dauerhaftigkeit zu erfüllen. Kunstbauten sind periodisch einer Inspektion zu unterziehen. Diesbezüglich gibt es in allen Industrieländern entsprechende Gesetze und Regelwerke, beispielsweise in Deutschland die DIN 1076 und die RI-EBW-Prüf und in Österreich die RVS-Reihe 13.03.XX und das Dokument »06.01.02 Instandhaltung, Instandhaltungsplan« der ÖBB Infrastruktur. Der vorliegende Beitrag präsentiert das Konzept und die Umsetzung eines Pilotprojekts zum Einsatz innovativer Technologien in der Inspektion von Bauwerken. Auf Basis von unbemannten Luftfahrzeugen, sogenannten UAVs oder »Drohnen«, und anderen Trägerplattformen sowie Technologien zu digitaler Bildverarbeitung, insbesondere Methoden der künstlichen Intelligenz, soll eine Unterstützung bei der Inspektion von Kunstbauten auf Dienstleistungsbasis ermöglicht werden. Ziel ist die Sicherstellung einer objektivierten und nachvollziehbaren Schadensdetektion unter Minimierung kostenintensiver Prozesse wie Fahrbahnund Gleissperren, Brückenuntersichtgeräten etc. 1 Nutzen für Infrastrukturbetreiber 1.1 Allgemeines Im Zuge der Ausarbeitung eines Konzepts für ein Pilotprojekt wurden von den Projektbeteiligten grundsätzliche Überlegungen hinsichtlich eines Einsatzes von UAV für den Inspektionsprozess angestellt. Der erwartete Nutzen und die Vorteile dieser Technologie werden im Folgenden kurz zusammengefasst.
1.2 Nutzen und Vorteile Datenerfassung: – rasche, sichere, und vollständige Aufnahme von Objekten; – effiziente Inspektion von schwer zugänglichen Bauwerken, zum Beispiel große Talbrücken; – keine oder nur minimale Betriebseinschränkungen während der Inspektion, zumindest wenn auf Befliegung direkt über der Verkehrsfläche verzichtet wird; – bei der Notwendigkeit von Betriebseinschränkungen lassen sich diese durch die Zeiteinsparung deutlich verkürzen; – flächendeckende Erfassung und exakte Verortung von Bauwerkszustandsdaten. Datenauswertung: – automationsgestützte, objektivierte und nachvollziehbare Klassifizierung von Bauwerksschäden; – ortsunabhängige augenscheinliche Bewertung des Bauwerkszustands durch Expertin oder Experten auf Basis der Befliegungsdaten; – Georeferenzierung der erfassten Daten und positionsbezogene Auswertungsmöglichkeiten über zeitliche Veränderung von Schadstellen, Anomalien etc.; – sicheres und teilautomatisiertes Erkennen und Quantifizieren von Zustandsveränderungen und Schäden durch periodische Bauwerksprüfung; – objektive und wiederholbare Detektion von Schäden. Datenvisualisierung und Dokumentation: – Arbeitsgrundlage für Bauherren, unabhängige Prüfingenieure und Anlagen buchhaltung; – softwareunabhängige Web-GIS-Darstellung und BIM-Datenlieferung; – strukturierte Archivierungs- und Abfragemöglichkeiten von Bauwerks bestands- und -zustandsdaten; – Schnittstelle für die Integration von Planungsdaten; – Verwendung der dreidimensionalen Bauwerksdarstellung als Planungs grundlage für erforderliche Sanierungs-/Instandsetzungsmaßnahmen; – einfache Erstellung von genauen Bestandsplänen aus den Ergebnissen; – uneingeschränkter bzw. vom Auftraggeber definierbarer Nutzerkreis; – Datenerstellung als Grundlage für Lifecycle-Management.
1.3 Innovation und Weiterentwicklung Datenakquisition: Durch optische und multispektrale Sensoren erfolgt die Aufnahme von Bauwerken mit keiner oder nur minimaler Beeinflussung der laufenden Nutzung. Mittels photogrammetrischer Methoden werden die erhaltenen Bildinformationen zu einer dreidimensionalen digitalen Abbildung des Bauwerks zusammengefügt. Das dreidimensionale Modell stellt die Grundlage für weitergehende Planungsaufgaben dar. Datenauswertung: Bildbearbeitungs- und -analysetools werden dazu genutzt, Informationen zum Bauwerkszustand automatisiert zu ermitteln. Neben optisch feststellbaren Bauwerksschäden, zum Beispiel Verfärbungen, Rissen, geometrischen Anomalien, die Rückschlüsse auf Wassereintritte, Moosbewuchs, Betonabplatzungen, Sulfattreiben etc. erlauben, können mittels multispektral erfasster Informationen auch physikalische Materialzustandsdaten ausgewertet und interpretiert werden.
Datenvisualisierung und -management: Das dem Kunden über ein Web-Tool, das heißt, ohne Spezialsoftware zugängliche Endprodukt kann als Modul in bestehen de Bauwerksmanagement-Datenbanken von Infrastrukturbetreibern über Verlinkung eingebunden oder stand-alone verwendet werden. Das WebGIS ermöglicht auf der Startseite die Wahl des interessierenden Bauwerks analog den Funktionalitäten von Google Maps. Erfasste bzw. automatisiert ermittelte Informationen wie beispielsweise Fotos und Schadstellen können durch Filter funktionen (Zeitfilter, Layer) oder durch Klick auf die entsprechende Position auf dem 3-D-Objekt aus der dahinterliegenden Datenbank abgefragt und durch die Expertin oder den Experten bewertet, kommentiert, kategorisiert, also getagt werden. Die entsprechende Information wird ebenfalls in der dahinterliegenden Datenbank abgelegt und ist in weiterer Folge mittels der Filterfunktionen strukturiert abrufbar.
2 Ziele für ein Pilotprojekt 2.1 Allgemeines Im Zuge eines gemeinsamen Forschungsprojektes mit den ÖBB wurde ein Pilotprojekt durchgeführt. Dessen Hauptziel ist, die Evaluierung anhand eines realen Brückenbauwerks, der Falkensteinbrücke, zu testen, inwieweit der Inspektionspro zess bei den ÖBB durch den Einsatz von UAVs unterstützt werden kann. Für das Pilotprojekt wurde eine Reihe von Zielen und Anforderungen definiert. 2.2 Rechtliche und organisatorische Rahmenbedingungen Bei der Vorbereitung und Umsetzung des Projekts ist unter anderem Folgendes zu berücksichtigen: – gesetzliche Rahmenbedingungen für Drohnen, Vorgaben der Austro Control in Österreich; – generelle Flugerlaubnis, regionale Einschränkungen, Anforderungen an die Drohne, Vorgaben der Austro Control; – Flugerlaubnis im Bereich von ÖBBObjekten; – Anlagenverantwortung, Zusammenwirken mit dem Anlagenverantwortlichen; – Versicherungen und Haftungen; – Übernahme der Ergebnisse in die ÖBB; – technische Normen, Richtlinien und Regelwerke zur Bauwerksprüfung.
2.3 Technische Projektziele Visuelle Inspektion und Schadensdokumentation: – Inspektion von Bereichen, die schwer zugänglich sind: nicht in BCR-Reichweite, nicht mit sonstigen Hilfsmitteln einfach erreichbar; – Inspektion von Bereichen, welche mittels BCR zugänglich sind; – Inspektion von Bereichen, welche vom Boden aus einfach erreichbar sind; – Passpunktmessungen. Dokumentation und Verortung: – Fotodokumentation von Rissen und sonstigen Schäden; – Erstellung eines fotorealistischen Abwicklungsplanes; – nachvollziehbare Verortung von Schäden am Objekt; – Befüllen des ÖBB-Inspektionsblattes; – Befüllen der ÖBB-Datenbank mittels MAZE-Eingabe. Feststellung der Grenzen und Einschrän kungen des Drohneneinsatzes: – durch Befliegung nicht erreichbare und inspizierbare Bereiche; – Abklopfen; – Lagerfunktionsprüfung; – sonstige Einschränkungen. Messtechnische Untersuchung mittels Drohnen: – Rissbreitenmessung; – Feuchtebestimmung; – Chloridgehaltbestimmung; – Abplatzungen und Hohlstellen. 3-D- Modellierung und Visualisierung: – Erstellung eines 3-D-Modells aus der Befliegung; – Verortung und Visualisierung am 3-D-Modell; – nachhaltige Dokumentation.
2.4 Wirtschaftlichkeitsbetrachtung Dazu gehören folgende Parameter: – Kostenvergleich; – Personalbedarf; – Zeitbedarf; – vermiedene Kosten, zum Beispiel Nichtverfügbarkeitskosten durch Gleissperren; – Lifecycle-Management.
3 Technik und Methoden 3.1 Die Drohne Als zentrale Trägerplattform kommt ein State-of-the-Art-Multikopter zum Einsatz. Die Auswahl des Fluggeräts (Payload) erfolgt auf Basis der gewählten OnBoard-Sensorik, das heißt der Kameras. Die Flugsteuerung der Drohne erfolgt (semi)automatisch bzw. situationsabhängig manuell. Die Einhaltung der Trajektorie entsprechend dem Flugplan wird primär durch den Einsatz von GPS-RTK sowie Abstandssensoren gewährleistet.
3.2 Flugplanung und Befliegung Um ein genaues 3-D-Modell auf Basis von Fotos zu erstellen, ist es erforderlich, Fotos zu erhalten, die so viel Informationen wie möglich aufweisen. Aus diesem Grund spielt eine genaue Flugplanung eine Schlüsselrolle.
3.3 Sensorik Zentraler On-Board-Sensor der Drohne ist eine Systemkamera mit hoher Auflösung zur Aufnahme im RGB-Bereich. Das Objektiv mit fixer Brennweite und möglichst hoher Lichtstärke wird vor und nach dem Einsatz kalibriert. Die RGB-Kamera bildet alles ab, was auch das menschliche Auge sieht. 3.4 Bildbearbeitungs- und Auswertesoftware Auf Basis der aufgenommenen Bilder erfolgt die Erstellung eines 3-D-Modells der Brücke. Hierzu wird eine Software zur robusten photogrammetrischen Auswertung verwendet. Mittels Algorithmen des Bündelblockausgleichs ist eine präzise gegenseitige Orientierung der Bilder gewährleistet, zusätzlich wird damit die korrekte räumliche Positionierung des Objekts in einem übergeordneten Referenzsystem erzielt. Output der photogrammetrischen Auswertung sind 3-DDaten für die Visualisierung sowie exakt verortete und entzerrte Aufnahmen als Basis für die Detektion von Betonschäden.
3.5 3-D-Visualisierung Die Bereitstellung der Visualisierungen erfolgt softwareunabhängig über webbasierte Viewer. Der Abruf der Visualisierungen ist über ein webGIS organisiert, das der Verortung der Projektbasisdaten dient. Der Anwender ist in der Lage, alle Funktionalitäten des 3-D-Viewer ohne Spezialsoftware zu nutzen. 3.6 Detektion von Betonschäden Auf Basis der Aufnahmen der On-BoardSensoren erfolgt die Detektion von Betonschäden. Hierzu wird ein künstliches neuronales Netz mittels DeepLearning trainiert. Zu den detektierten Schäden zählen zum Beispiel Verfärbungen, Abplatzungen, freiliegender Bewehrungsstahl, Bemoosung, Risse, Verformungen, Rostfahnen usw. Neben der Detektion wird hierbei eine genaue Verortung der jeweiligen Schäden vorgenommen. Risse im Beton werden hinsichtlich ihrer Länge und Breite klassifiziert.
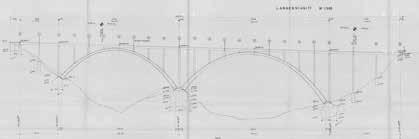
4 Das Pilotprojekt Falkensteinbrücke Die Falkensteinbrücke bei Obervellach ist mit einer Länge von 396 m die längste Brücke der ÖBB-Tauernbahn und überspannt mittels zweiter Bögen ein östliches Seitental des Mölltals (Bild 1, 2). Für die Befliegung der Falkensteinbrücke wurde die nördliche Hälfte des südlichen Bogens ausgewählt (Bild 3), wobei die Tragplatte, die Pfeiler und der Bogen beflogen wurden. Dies entspricht ungefähr einem Viertel der gesamten Brücke. Innerhalb des Projektbereichs standen die Tragplatte, der Bogen sowie die Pfeiler 10–13 im Fokus (Bild 4).
Übersicht: Falkensteinbrücke auf ÖK50 und Luftbild © BEV/Kärnten GIS

3 Befliegungsbereich © ÖBB-Infrastruktur AG
Vorab wurden dem Drohnenpiloten die Anforderungen an die Befliegung übermittelt: – Längsüberlappung ≥ 80 %; – Querüberlappung ≥ 70 %; - fixe Blende, ISO, Belichtungsdauer; – Pixelgröße am Objekt (GSD) 1 mm; – Anfertigung von Übersichtsbildern aus größerer Entfernung; – s-förmige Befliegung der Pfeiler; – Befliegung der Kanten; – Befliegung zwischen den Pfeilern und Unterseite der Tragplatte. Die Erstbefliegung erfolgte am 27. November 2017 bei gutem Wetter mit einem Hexakopter durch die Skyability GmbH (Bild 5). Die Drohne wurde manuell durch den Piloten vom Boden aus gesteuert, unterstützt durch einen Beobachter sowie durch FPV-Datenverbindung. Der Abstand zwischen Brücke und Drohne betrug durchschnittlich 3–5 m. Als Sensor wurde eine Sony Alpha 7RII mit 42 MP Vollformat verwendet. Als Fixbrennweite wurde 70 mm gewählt. Die Montage der Kamera erfolgte teils oberhalb, teils unterhalb der Drohne. Die Auslösung der Kamera oblag dem Piloten. Die Aufnahmepositionen wurden so gewählt, dass alle Flächen möglichst frontal und schräg erfasst werden. Die Überlappung der Bilder beträgt ca. 80 %.
4

Pfeiler im Aufnahmebereich © VCE ZT GmbH
5

Drohne mit Montage der Sensorik an der Unterseite © VCE ZT GmbH
5 Datenauswertung und Visualisierung 5.1 3-D-Modellierung Von aufgenommenen 3.599 Fotos wurden 2.919 für die Modellierung ausgewählt und verwendet. Unscharfe, zu dunkle oder wiederholende Fotos wurden nicht berücksichtigt. Der erste Schritt der Modellierung ist die Ausrichtung der Fotos. Um diesen Prozess zu beschleunigen, wurden die GNSS-Koordinaten der Fotos der Drohne zugrunde gelegt. Die Ergebnisse jenes Schrittes durch die Kalibrierung der Kamera liefern eine »Sparse Point Cloud« sowie verbesserte Koordinaten und Orientierung der Fotos. Im letzten Schritt wurde eine dichte Punktwolke erzeugt: mit insgesamt 2.919 Fotos eine Herausforderung für die Hardware. Das Resultat ist eine Punktwolke mit 190 Mio. Punkten.
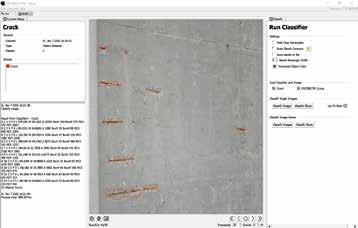
5.2 Bildanalyse Wie bereits erwähnt, erfolgen die Bildanalyse und die Schadenserkennung auf den aufgenommenen Bildern mit Methoden der künstlichen Intelligenz. Sämtliche Bilder werden dabei auf verschiedene Schadenstypen hin untersucht, wie zum Beispiel Risse, Abplatzungen, Durchfeuchtung und Chloridgehalt. Die detektierten Schäden werden auf den Bildern markiert, und zwar mittels Polylinie oder Polygon bei flächigen Schäden, und anschließend in eine Datenbank geschrieben. Dabei werden der Schadenstyp und die Bildkoordinaten der Markierung gespeichert.
6 Erstellen eines Klassifikators in Falco © Palfinger SI GmbH
Im nächsten Schritt werden die Schadenseinträge in der Datenbank mit einer speziellen Software georeferenziert. Anschließend werden Schäden, welche durch die Bildüberlappung bei der Befliegung oder aufgrund der Schadensgröße auf mehreren Bildern abgebildet sind, zu einem Schaden vereinigt und als geometrische Schadensobjekte in der Datenbank abgelegt.
5.3 Visualisierung Für die Visualisierung der Auswerteergebnisse wurde Web-Tool entwickelt. Diese erlaubt die Darstellung des 3-D-Modells mit allen detektierten Schäden am Modell (Bild 7). Die Darstellung der Schäden findet dynamisch statt, das heißt, alle Daten werden in einen 3-D-Viewer und eine Tabelle direkt von der Datenbank geladen, und die vom Beurteiler vorgenommenen Änderungen werden ebenfalls dort gespeichert. Jeder Mangel, der eine definierte ID hat, wird damit auch gekennzeichnet.
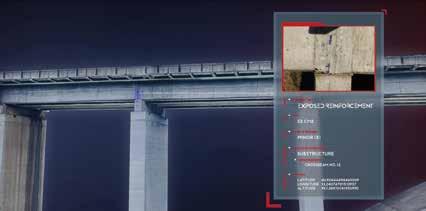
Die im Web-Tool dargestellten Ergebnisse, also die Visualisierung und tabellarische Auflistung der Schäden und Klassifizierungsdetails, werden im nächsten Schritt durch einen erfahrenen Bauingenieur überprüft, interpretiert und beurteilt. Die Software verfügt zudem über einen Report-Generator, der den Bearbeiter bei der Berichtserstellung unterstützt.
6 Zusammenfassung Im vorliegenden Beitrag wird anhand eines Pilotprojektes das Potential neuer Technologien im Bereich der Inspektion und Zustandsprüfung von Ingenieurbauwerken aufgezeigt. Insbesondere bei großen Projekten, wie der gezeigten Falkensteinbrücke, bei denen eine vollständige, handnahe Prüfung mit herkömmlicher Zugangstechnik nicht möglich bzw. nur mit sehr hohen Kosten durchführbar ist, können diese Technologien bereits wertvolle Unterstützung bieten. Gleichzeitig lassen sich damit die Nichtverfügbarkeitskosten durch Verkehrseinschränkungen minimieren.
Ein zusätzlicher Mehrwert kann sich zukünftig durch den Einsatz weiterer Sensorik, wie etwa Multispektralkameras, Laserscanner etc., auf der Trägerplattform ergeben. Erste Versuche zeigen Potential im Hinblick auf die Oberflächenfeuchtemessung oder die Bestimmung der chemischen Oberflächenbeschaffenheit, zum Beispiel Chloridgehalt.
Autoren: Dipl.-Ing. Peter Furtner VCE Vienna Consulting Engineers ZT GmbH, Wien, Österreich Mag. Albrecht Karlusch Palfinger Structural Inspection GmbH, Wien, Österreich Literatur [1] Forschungsbericht FE-Nr. 15.0602/2014/LRB: Unterstützung der Bauwerksprüfung durch innovativ digitale Bildauswertung - Pilotstudie. Hrsg. vom TÜV Rheinland im Auftrag der Bundesanstalt für Straßenwesen (BASt) in Deutschland. [2] Morgenthal, G.; Hallermann, N.; Achterlik, M.: Unbemannte Fluggeräte zur Zustandsermittlung von Bauwerken; in: Forschungsinitiative Zukunft Bau, F 2971, Stuttgart, 2015. [3] Konzept für ein ÖBB-Pilotprojekt »Unterstützung der Bauwerksprüfung mit UAV – Pilotprojekt Falkenstein, Leistungsbeschreibung«. Erstellt durch VCE und Angst-Group (UTC) für die ÖBB Infrastruktur AG im November 2016.

